Dr.-Ing. habil. Jörg Wollnack AWZM.1. Gleichstrommotor
|
|
|
- Matilde Lorenz
- vor 8 Jahren
- Abrufe
Transkript
1 AWZM.1 Gleichstrommotor
2 AWZM.2 Ankerwicklung S Feldwicklung Anker φ Stator N H Kollektor Kommutator Prinzipielle Funktion eines Gleichstrommotors

3 AWZM.3 Φ Φ w i f f u IC H w w f ui = wφωsin( ωt) Kommutator uic = wφω sin( ωt) Prinzipieller Aufbau und Schaltbild der fremderregten Gleichstrommaschine

4 AWZM.4 Ohne Stromwender würde sich die Spule drehen, bis die Flächennormale und der B-Vektor parallel sind. Das Drehmoment ist dann Null und die Spule würde in diesem stabilen Zustand verharren. Mit Stromwender wird nach dem Durchlaufen eines Polpaares die Stromrichtung in der Stromschleife nach einer halbe Umdrehung umgepolt, weshalb beim sin( ) der Betrag zur Wirkung kommt. Dies bewirkt eine dauernde Drehbewegung der Gleichstrommaschine. Stromwender/Kommutator
 der Betrag zur Wirkung kommt.")
5 AWZM.5 1 Ständer 2 Hauptpole 3 Wendepole 4 Polschuhe 5 Kompensationswicklung 6 Erregerwicklung 7 Läufer 8 Hauptfluss Gleichstrommotor I

6 AWZM.6 Wendepole: Sind Hilfspole, die dafür sorgen, dass bei der Kommutierung keine zu hohen Induktionsspannungen auftreten, welche zu einem Funkenschlag bzw. dem sogenannten Bürstenfeuer führen (Parallelgeschaltete Keramikkondensatoren reduzieren Hochfrequenzstörungen). Bürstenverschiebung: Stellt eine absichtliche geringe Verdrehung der Bürsten auf dem Kommutator dar. Dies reduziert ebenfalls das Bürstenfeuer. Gleichstrommotor II
.")
7 pw M = i C i π a φ φ A A M A J p a w AWZM.7 : = Trägheitsmoment : = Zahler der Polpaare : = Zahl der Ankerzweige : = Windungzahl der Ankerwicklung PA = ui ia = MA ωa ui ia = CM φ ia ωa Motorgleichung Erregergleichung ui = CM φ ω φ = C i A φ E Gleichungen der Gleichstrommaschine

8 Anker AWZM.8 i t A( ) R A L A Last J, ω() t u t A( ) u t I( ) M Felderregung φ L E M = C φ i A M A φ = C i E φ ui = CM φ ωa i t E( ) R E u t E( ) Ersatzschaltbild des fremderregten Gleichstrommotors
 R E u t E( )")
9 AWZM.9 Elektromechanischer Teil di u = i R + L + C dt die ue = ie RE + LE dt φ = φω A A A A A M A M = C i (1) (2) C i E (3) φ A M φ A (4) Bewegungsgleichung dω = dt A J MA ML (5) Mechatronische Gleichungen der Gleichstrommaschine
 Mechatronische Gleichungen der Gleichstrommaschine")
10 [sec] 1 n Drehzahl = 2850/min Normale Maschinen AWZM.10 0,1 τ M τ el 0,01 τ M τ = el τ = L R A A A M 2 ( C C i ) M JR φ E 0,001 0,0001 τ el Scheibenläufer P [kw] Zeitkonstanten von Gleichstromnebenschlussmotoren

11 AWZM.11 Hochlauf im Leerlauf (M L = 0) J d ω A u C φ ω = MA, i A M A A dt RA d ω A C φ M u ω A A dt R R = J = ( C ) 2 Mφ A A J dω C φ u + ω = C t R R A M A A M φ d A A ( φ ) 2 dω C C φ u + ω = dt J R J R A M M A A A A t u JRA A M 2 CM φ ( CMφ ) A τ M ω () t = 1 e, τ = Hochlauf des Gleichstromnebenschlussmotors I
 A τ M ω () t = 1 e, τ = Hochlauf des Gleichstromnebenschlussmotors I")
12 d xt ( ) yc + axt 0 () = yc sx() s + a0 X() s = dt s yc ( C ) 2 X() s ( s+ a0 ) = Mφ a s 0 = JR yc 1 A X() s = C s ( s+ a0 ) M φ ua yc = J R yc a0 A X() s = a0 s( s+ a0 ) a 1 ae at s s+ a ( ) AWZM.12 CM φ ua 2 ( CM ) t y t ( a ) 0 t J R φ JR u J R A τ M xt () = 1 e = 1 e = 1 e, τ = a JR c A A A 2 M 2 0 ( CMφ) CMφ ( CMφ) A Hochlauf des Gleichstromnebenschlussmotors II
 t y t ( a ) 0 t J R φ JR u J R A τ M xt () = 1 e = 1 e = 1 e, τ = a JR c")
13 AWZM.13 u C Φ A M ω M L i A u A/ RA τ τ = JR A M 2 ( C φ ) M τ t τ t ω A u C A = M 1 φ e t τ i A = u R A A e t τ Hochlauf des Gleichstromnebenschlussmotors III

14 (2) und (3) in (1) u = C φω + R M A A A M A 2 ( CM φ ) u R M ω = A A A A 2 CM φ ( CM φ ) i A M A = C φ M ui = CM φ ωa Geschwindigkeitssensor Geradengleichung y = m x+ c AWZM.14 Momentensensor Gleichstromnebenschlussmotors

15 AWZM.15 ω u R M = A A A A 2 CM φ ( CM φ )
")
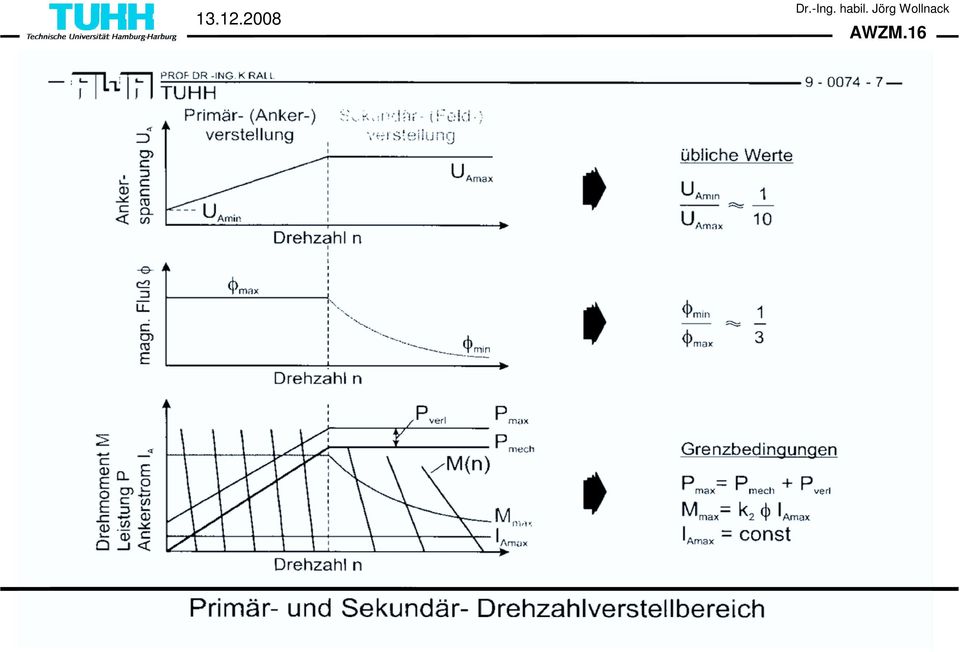
16 AWZM.16
17 AWZM T Steuerung R L F D M u D q T T t Drehzahlvariation durch Pulsbreitenmodulation

18 AWZM.18 i A R A L A φ = Cφ ia u A R E L E M u I i A = M A C φ M i = A M A C φ M Bei Entlastung Zerstörungsgefahr ωa u A ωa = Cφ CM MA ( CM φ ) 1 RA C C φ M Stationärer Grenzfall Gleichstrommotor im Reihenschlussbetrieb

19 AWZM.19 i A,ω A i A R A L A u A M u I R E L E M N M A Bei Entlastung Zerstörungsgefahr! weiche Kennlinie Kennlinie des Gleichstromreihenschlussmotors

20 AWZM.20 d A b A J d b 2 A A

21 AWZM.21
22 AWZM.22 Drehstrommotoren
23 AWZM.23 Drei gleichartige Wicklungsstränge sind um 120 versetzt. Drei Erregerströme bzw. spannungen sind ebenfalls um 120 zueinander phasenverschoben. Drei harmonische Strangspannungen und Ströme I
24 V 2 W 1 jy U 1 B W 2 V 1 x B B B u v w 1 ( jωt jωt = B e + e ) 2 1 ( ( ω ) ( ω ) = B e + e ) e 2 AWZM.24 j t 120 j t 120 j120 1 ( ( ω ) ( ω ) = B e + e ) e 2 j t 240 j t 240 j 240 U 2 B= Bu + Bv + Bw + + = j240 j480 1 e e 0 B = 3 2 j t Be ω Dies entspricht einem kreisförmigen Drehfeld der magnetischen Flussdichte. Drei harmonische Strangspannungen und Ströme II
25 AWZM.25 V 2 U 1 B W 2 Hartmagnetischer Rotor dreht sich synchron mit dem Drehfeld (Synchronmaschinen). W 1 V 1 Weichmagnetischer Rotor dreht sich synchron mit dem Drehfeld (Reluktanz Synchronmaschinen). U 2 Spulensystem mit reduzierter Drehfrequenz weist einen Induktionsstrom auf, dessen Magnetfeld eine Drehung des Rotors bewirkt (Asynchronmaschinen; Mit steigendem Drehzahlunterschied nimmt die Flussänderungsgeschwindigkeit und damit die Stärke des Magnetfelds und Drehmoments zu). Rotoren im Drehfeld
26 AWZM.26 Spule φ Drehachse i B = B e j ω t H H Liegt eine Drehzahldifferenz zwischen Drehfeld und Rotor vor, so existiert eine Flussänderung dφ dt in der Spule. Die Induktionsspannung bewirkt einen Kreisstrom und dessen magnetisches Feld erzeugt ein Drehmoment an dem Spulensystem. Infolgedessen folgt der Rotor dem rotierenden Feld des Stators (Lenzsche Regel). Spulensystem im Drehfeld
27 AWZM.27 Wikipedia Kurzschlussläufer der Asynchronmaschine
28 AWZM.28 Zur Verstärkung der Magnetfelder und Momente werden Ständer und Läufer aus genuteten ferromagnetischen geschichteten Blechen hergestellt. Die Schichtung reduziert Wirbelströme und damit Wirbelstromverluste im Eisen. Wikipedia Drehfeld des Drehstrommotors
29 AWZM.29 Leerlauf Stillstand Feldbilder des Drehstrommotors
30 AWZM.30 Wikipedia Drehstrommotor
31 AWZM.31
32 AWZM.32 i 1 R 1 jx σ 1 R σ 2 jx σ 2 i 2 Rotor 2 Φ 21 ui2 = -dψ 2 / dt ui21= -dψ 21 / dt u 1 i h jx h u h R 2 = (1 - s )/s i 2 Φ 2 H 2 Streufluss Streufluss 1 i 1 Φ 1 H 1 Wickelsinn (rechtswendig) ui1= -dψ 1 / dt ui12= -dψ 12 / dt Stator Φ 12 Symmetrie in den 3 Phasen Drehstrommotor und Transformator
33 AWZM.33 Symmetrie in den 3 Phasen
34 AWZM.34 i 1 R 1 jx σ 1 R σ 2 jx σ 2 i 2 i h u 1 jx h u h R 2 = (1 - s )/s Drehmoment s ( 1 σ ) x M = m p L x ( σ ) ( 1 σ ) L x M = m p i L s ( 2 1+ x ) s 2 s u 2 s ω s Leerlaufdrehzahl Schlupf ωs = p n 0 Ω 0 s ω ω r = = n 0 n s 0 n Drehstrommotor unter Last I
35 AWZM.35 Kippmoment M k = m p 1 σ 2 σ L ω s s Kippschlupf s k = Rr ω L s r σ Streuung σ = 1 2 Lh L L s r Rotorhilfswert Klosssche Momentenformel x = M = ωr L R k r r 2 M k s s + s s k Drehstrommotor unter Last II
36 AWZM.36 Symbol Einheit Bezeichnung Bemerkungen u s V Statorspannung Strangspannung (Phase -Null) i s A Statorstrom Strangstrom (Sternschaltung) ω s rad/s Statordrehfrequenz ω = 2 π f (bei 50 Hz = 314 rad/s) f Hz Statorfrequenz üblicherweise 50 Hz, in Amerika 60 Hz R s Ω Statorwiderstand bei großen Motoren zu vernachlässigen L σ s H Statorstreuinduktivität beeinflusst das Kippmoment und den Anlaufstrom L s H Statorinduktivität L s = L σ s + L h L h u r V Rotorspannung bei Kurzschlussankermotoren ist u r = 0 i r A Rotorstrom ω r rad/s Rotordrehfrequenz im Stillstand ist ω r = ω s im Leerlauf ω r = 0 R r Ω Rotorwiderstand bei Industriemotoren schlupfabhängig L σ r L r H Hauptinduktivität gemeinsame Induktivität von Stator und Rotor H Rotorstreuinduktivität beeinflusst das Kippmoment und den Anlaufstrom H Rotorinduktivität L r = Lσ r + L h m - Anzahl Phasen üblicherweise 3 (für Drehstrom) p - Polpaarzahl eine 2-polige Maschine hat die Polpaarzahl 1 n = Ω rad/s Drehzahl 3000 U/min sind 314 rad/s Variablen des Drehstrommotormodells
37 AWZM.37 I An M kipp In ( ) Mn ( ) I M Läuferstrom Drehmoment M N M An I N Last Betriebszustand M(n) = M L (n) 0 Drehzahl n n Kipp n N n s 1 Schlupf s s kipp s N 0 M I an An < < MN 5 I N n = (1- s) ns s = n n s - n s Kennlinien eines Asynchronmotors I
38 AWZM.38
39 AWZM.39 Andresen Kennlinien eines Asynchronmotors II
40 AWZM.40 Andresen Kennlinien eines Asynchronmotors III
41 AWZM.41 Andresen Kennlinien eines Asynchronmotors (Strangspannungsvariation)
42 AWZM.42 Andresen Kennlinien eines Asynchronmotors (Rotorwiderstandsvariation)
43 AWZM.43 Andresen Kennlinien eines Asynchronmotors I (Frequenzvariation)
44 AWZM.44 Andresen Kennlinien eines Asynchronmotors II (Frequenzvariation)
45 AWZM.45 Andresen Kennlinien eines Asynchronmotors (Streuungsvariation)
46 AWZM.46 Andresen Wirkungsgrad des Asynchronmotors
47 AWZM heute 230V und 390V Werte sind Effektiv- werte Stern-Dreieckschaltung beim DS-Asynchronmotor
 HANSER Aufbau eines permanent erregten Drehstrom-Servomotors")
48 AWZM.48 Elektrischer Anschluss Rotorwelle Motorgeber Rotor mit Permanentmagneten Stator mit Wicklung Haltebremse (optional) HANSER Aufbau eines permanent erregten Drehstrom-Servomotors (Synchronmotor)
49 AWZM.49
50 AWZM.50 Scheibenmotoren
51 AWZM.51 Scheibe aus Isoliermaterial Permanentmagnet S N H aufgeklebte Leiterbahnen Spezial-Kohlebürsten Prinzip eines Scheibenläufers
52 AWZM.52
53 AWZM.53 Linearmotor
54 AWZM.54 PROF.DR.-ING. K.RALL TUHH Stator Nuten mit Wicklung N S Stator im Drehfeld Polrad Drehfeld Stator abgewickelter Stator Stator, integriert im Linearantrieb MM 44/2002 P. F. Brosch Luftspalt N Sekundärteil doppelte Polteilung Linearantrieb als abgewickelter Drehstrommotor S Wanderfeld Primärteil
55 AWZM.55 PROF.DR.-ING. K.RALL TUHH T P T P T P Primärteil mit Ständerwicklung Sekundärteil V magnetischer Rückschluß Konstruktionsprinzip eines Linearmotors, T Polteilung P
56 AWZM.56 PROF.DR.-ING. K.RALL TUHH Primärteil Kabelschlepp Sekundärteil Spielfreies Führungssystem Lineares Wegmesssystem MM 44/2002 P. F. Brosch Linearmotor, bestehend aus Primärteil mit Wicklung und Sekundärteil
57 AWZM.57
58 AWZM.58 Schrittmotoren
59 AWZM.59
60 AWZM.60 Was ist hier falsch? Rotor S 1 S 2 S 3 S 4 S + N - Stromquelle Wikipedia Permanentmagnetischer Schrittmotor
61 Reluktanz-Motor Hybrid-Motor AWZM.61 Permanentmagnet-Motor Bauarten von elektrischen Schrittmotoren
62 AWZM.62 Impulsfolgen Drehrichtung Ansteuergerät Logikteil Leistungsteil Schrittmotor Last Netzteil (t) Impulse t t Rummich Schrittmotorantrieb
63 AWZM.63
64 AWZM.64
65 AWZM.65
66 AWZM.66
67 Elektromagnet 1 Elektromagnet 2 Strang 1 Strang 2 AWZM.67 Läufer I 1 I 2 N S Rummich Ständer τ Ν Elektromagnetischer Linearschrittantrieb
68 Schritt... Schrittwinkel... Schrittfrequenz... Drehzahl... Selbsthaltemoment.. Haltemoment... Anlaufbereich... Beschleunigungs-...bereich Leerlauf... Anlaufgrenzfr... (Start-Stop-Frequenz) Anlaufgrenzmoment Der Vorgang, bei dem sich die Motorwelle um den Schrittwinkel dreht. Der Nennwinkel, um den sich die Motorwelle je Steuerimpuls dreht. AWZM.68 Die Anzahl der Schritte, die die Motorwelle bei konstanter Steuerfrequenz in einer Sekunde macht. Umdrehung pro Minute, berechnet aus Schrittfrequenz Schrittwinkel Das max. Drehmoment, mit dem man einen nicht erregten Motor statisch belasten kann, ohne ihn um einen Schrittwinkel zu verdrehen. Das max. Drehmoment, mit dem man einen erregten Motor statisch belasten kann, ohne ihn um einen Schrittwinkel zu verdrehen. Betriebsbereich, in welchem der Motor ohne Schrittfehler bei einer bestimmten starr angekuppelten Zusatzschwungmasse anlaufen und anhalten kann. Betriebsbereich, in welchem der Motor bei einer bestimmten starr angekuppelten Zusatzschwungmasse ohne Schrittfehler in einer Drehrichtung arbeiten jedoch nicht ohne Schrittfehler anlaufen und anhalten kann. Die Betriebsart, bei der der Motor weder durch von außen angreifende Drehmomente noch durch angekuppelte Zusatzschwungmasse belastet wird. Größte Steuerfrequenz, bei welcher der Motor mit einer bestimmten Last, bestehend aus Reibmoment und Beschleunigungsmoment für starr angekuppelte Schwungmassen, ohne Schrittfehler anlaufen kann. Das höchste Lastmoment, bei dem der Motor mit einer starr angekuppelten Schwungmasse bei einer bestimmten Steuerfrequenz ohne Schrittfehler anlaufen kann. Rall Begriffserläuterungen für Schrittmotore
69 AWZM.69 Servoantriebe
70 AWZM.70 Zur Zerspanung notwendige Vorschubkraft F f Grenzvorschub pro Zahn HSC Konventionelle Zerspanung Vorschub pro Zahn 0,1 0,25 0,4 f z [mm] (konv.) konventioneller Vorschubantrieb Direktantrieb 100 0,02 0,12 0,22 f z [mm] (HSC) n sp [1/min] Spindeldrehzahl Pritschow Vergleich von Vorschubantrieben
71 Interpolator Sollwertgenerierung Feininterpolation Vorsteuerung Überwachung digitale Regeleinrichtung -Lage-Drehzahlregler bzw. Zustandsregler -Kompensationen -Feldorientierung AWZM Motorströme Motorlage bzw. Motordrehzahl Schlitten direktes Meßsystem Spindel drehzahl gesteuerter Motor Pritschow Getriebe Mechanische Übertragungselemente Elektromechanischer Vorschubantrieb
72 AWZM.72 Interpolator digitale Schnittstelle digitale Regeleinrichtung Linearmotor Schlitten direktes Meßsystem -Lage- Drehzahlregler -Zustandsregler -Feldorientierung Pritschow Elektromechanischer Lineardirektantrieb
73 Vorteile Die Bauraumoptimierung mittels mechanischer Untersetzung schnelldrehender Servomotoren, + eine mechanische Untersetzung reduziert die Rückwirkungen der Last auf das Antriebssystem, + die Hauptwärmequelle, der Antriebsmotor, kann meist außerhalb der Maschinenstruktur angebracht werden, + große Variantenvielfalt zu günstigen Kosten. Nachteile AWZM.73 - Elastizität des Antriebsstrangs, weshalb sich systembedingt eine Begrenzung der Regelbandbreite auf ca. k v < m/mm * min ( /s) ergibt, - nichtlineares Übertragungsverhalten wegen der Umkehrspanne, dem Spindelsteigungsfehler und ähnlichem, - begrenzte Lebensdauer aufgrund von mechanischem Verschleiß, - begrenzte Spindeldrehzahl zwingt für hohe Verfahrgeschwindigkeiten zu hohen Spindelsteigungen (stärkere Lastrückwirkung, reduzierte Laststeifigkeit) - Erwärmung der Spindel wegen des begrenzten Spindelwirkungsgrads. Rall Vor- und Nachteile elektromechanischer Antriebe
74 AWZM.74 Vorteile Nachteile + sehr hohe Regelbandbreite, + sehr hohe Positionier- und Wiederholgenauigkeit, + hohe Vorschubgeschwindigkeiten (v > 100 m/min ist möglich) und + hohe Zuverlässigkeit, da meist - außer bei Führungen - kein mechanischer Verschleiß auftritt. - meist großer Bauraum und hohes Eigengewicht, bezogen auf spezifische Kräfte/Momente, - Motorkühlung ist im allgemeinen notwendig, - Empfindlichkeit gegenüber Lastparameterschwankungen und - das Gewicht ist bei vertikalen Achsen auszugleichen (wird auch bei elektromechanischen Antrieben häufig gemacht) Rall Vor- und Nachteile direktangetriebener Vorschubantriebsachsen
75 AWZM.75
76 Vorteile - sehr hohe Regeldynamik - große Positioniergenauigkeit bei hohen Bahngeschwindigkeiten - hohe Verfahrensgeschwindigkeit - hohe Beschleunigungen bei nicht zu hohen Lasten Nachteile - erheblicher Kühlleistungsbedarf - großes Bauvolumen bezogen auf den Arbeitsraum - hohe Kosten AWZM.76 Daten Vorschubkraft Vorschubgeschwindigkeit Vorschubbeschleunigung absolute Positioniergenauigkeit Wiederholgenauigkeit 30 bis 4000 N <0,1 bis 5 m/s bis etwa 30 bis 50 m/s +/- 0,5 bis 50 ( m +/- 0,01 bis 5 ( m 2 Rall Servo-Direkt-Antriebe
77 AWZM.77 Umrichter
78 AWZM.78 Anforderungen Führen der Regelgröße entsprechend dem jeweiligen technologischen Antriebsproblem, Ausgleich von Störeinflüssen, Begrenzung von Regelgrößen Entkoppelung von Fluß und Drehmoment; Eigenschaften großer Drehzahlstellbereich von 1 : 1000, wobe bei konstanter Leistung ein Bereich von 1 : 4 abgedeckt werden kann, gute Rundlaufeigenschaften auch bei niedrigen Drehzahlen, rückspeisefähiger Netzstromspeicher, Motorüberwachung Verbesserung der Drehzahlsteifigkeit durch Drehzahlregelung Rall Anforderungen und Eigenschaften von Umrichtern für WZM-Hauptantriebe
79 AWZM.79
80 AWZM.80 I U BR I H I G3 >IG2> IG1> IG0 = 0 I R U H U Thyristor-Symbol, -Ersatzschalbild und -Kennlinie
81 AWZM.81 Kennlinienfeld Funktionsbereiche der Thyristorkennlinie
82 AWZM.82 Bipolare Transistoren NPN PNP Feldeffekt-Transistoren G S D pmos CMOS Schaltsymbole Transistoren
83 AWZM.83 Ohmsche Arbeitsgerade Transistorkennlinie
84 AWZM.84 Ohmscher Widerstand u B Kapazität u e Induktivität Elko Transistor als Schalter
85 AWZM.85 TO-92 TO-126 TO-220 TO-18 TO-5 TO-3 TO-252 SOT-23 Elko Gehäuseformen
86 AWZM.86
87 AWZM.87 Regelkonzepte
88 AWZM.88
89 AWZM.89 Schaltelemente Dynamisches Verhalten Transistor Feldeffekttransistor Thyristor kreisstromfrei kreisstrombehaftet Zahl der Quadranten 1 bis 4 Verwendung der Bremsenergie Wärmeenergie Netzeinspeisung Rall Unterscheidungsmerkmale von Antriebsreglern
90 AWZM.90 A L T Lagesoll Lage- Regler digital D A Regler analog Strom Drehzahl Lage Antrieb Lagegeber Strom- Tachogenerator N E U Lagesoll Lage- Drehzahl- Strom- Regler digital Strom Lage / Drehzahl Antrieb Lagegeber D. Naunin Regelungskonzepte für Servomotorenantriebe
91 AWZM.91 u mittlere Ausgangsspannung Zeit in t ( Rall Gleichrichterschaltung mit gesteuerten Stromrichtern
92 AWZM.92 Einspeisung Versorgung Versorgung Signalverarbeitung Anlaufsperre Drehzahlsollwert 2x analog oder 16 Bit parallel oder RS 232 C Positionssollwert 16 Bit parallel oder RS 232 C Hauptantrieb Binär codiert Digitale Eingänge Programmiermodul Digitale Ausgänge Mikrocomputer: Parametrisierung, Regelung, Überwachung, Diagnose analog Leistungssteuerung Einspeisung Versorgung Leistungsteil Leistungsteil Spindelpositionserfassung Versorgungsmodul KDV Hauptantriebsmodul KDA M 3~ Positionsistwert Drehzahlistwertu. Rotorposition Indramat Hauptspindelmotor 2 AD Blockschaltbild eines AC-Hauptantriebes
93 AWZM.93 Drehzahl- Regler Strom- Regler Pulsbreiten- Modulation Zuordner Ansteuerung I Leistungs- Stellglied Drehstrom Tacho- Synchronm. Generator SyM TG Rotatorlage- Geber Strom-Istwert Strom II Wechselrichter Drehzahl-Istwert 3~ I = Kommutator (zus. m. RLG) II = phasenrichtige Gleichrichtung des Strom-Istwertes III = phasenrichtige Aufbereitung des Drehzahl-Istwertes Siemens Drehstrom-Vorschub-Antrieb Blockschaltbild
94 AWZM V / 100 A / 15 khz L1 L2 L3 I/0 Int. Gen RAM 4K 3x A/D-C Bedienrechner 2x D/A-C T DSM Rall Übersichtsbild der Mikrorechnerregelung eines Drehstromservomotors
95 AWZM.95 Rotor-Achse i () t s δ i sq ω ω 1 i mr () t ξ ε i () t s i sd ρ Ständerstrom Stator-Achse i mr () t ε Magnetisierungsstrom Drehwinkel des Läufers Rall Feldkoordinaten der Drehstrommaschine
96 AWZM.96
97 AWZM.97
98 AWZM.98
Elektrische Maschinen
 1/5 Elektrische Maschinen 1 unktionsprinzipien 1.1 Kraftwirkung efindet sich ein stromdurchflossener, gerader Leiter der Leiterlänge l in einem homogenen Magnetfeld, so bewirkt die Lorentz-Kraft auf die
1/5 Elektrische Maschinen 1 unktionsprinzipien 1.1 Kraftwirkung efindet sich ein stromdurchflossener, gerader Leiter der Leiterlänge l in einem homogenen Magnetfeld, so bewirkt die Lorentz-Kraft auf die
maxon EC motor Bürstenlose DC Motoren: Eine Einführung
 maxon EC motor Bürstenlose DC Motoren: Eine Einführung Varianten: maxon EC Motorfamilien Gemeinsamkeiten Funktionsprinzip Wicklungsbeschaltung, Eisenverluste Elektronische Kommutierungssysteme Blockkommutierung
maxon EC motor Bürstenlose DC Motoren: Eine Einführung Varianten: maxon EC Motorfamilien Gemeinsamkeiten Funktionsprinzip Wicklungsbeschaltung, Eisenverluste Elektronische Kommutierungssysteme Blockkommutierung
Stromortskurve Asynchronmaschine
 Stromortskurve der Asynchronmaschine Prof. Dr.-Ing. Carsten Fräger Folie 1 von 61 Prof. Dr.-Ing. Stromortskurve Asynchronmaschine Stromortskurve der Drehstrom-Asynchronmaschine mit kurzgeschlossenem Rotor
Stromortskurve der Asynchronmaschine Prof. Dr.-Ing. Carsten Fräger Folie 1 von 61 Prof. Dr.-Ing. Stromortskurve Asynchronmaschine Stromortskurve der Drehstrom-Asynchronmaschine mit kurzgeschlossenem Rotor
Drehzahlvariabler Betrieb von Drehstrommaschinen
 Drehzahlvariable Antriebe Drehzahlvariable elektrische Antriebe werden heute in den meisten Fällen mit Käfigläufer Asynchronmaschinen, manchmal auch mit permanentmagneterregten Synchronmaschinen ausgeführt.
Drehzahlvariable Antriebe Drehzahlvariable elektrische Antriebe werden heute in den meisten Fällen mit Käfigläufer Asynchronmaschinen, manchmal auch mit permanentmagneterregten Synchronmaschinen ausgeführt.
4.4 ASM: Stromverdrängungsläufer Seite 1
 4.4 ASM: Stromverdrängungsläufer Seite 1 Stromverdrängung Mit zunehmender Größe wird das Anlaufmoment von Asynchronmaschinen im Verhältnis zum Kipp- und Nennmoment kleiner weil die ohmschen Widerstände
4.4 ASM: Stromverdrängungsläufer Seite 1 Stromverdrängung Mit zunehmender Größe wird das Anlaufmoment von Asynchronmaschinen im Verhältnis zum Kipp- und Nennmoment kleiner weil die ohmschen Widerstände
Zusammenfassung elektrische Maschinen Gleichstrommaschine
 Gleichstrommaschine i F F F F U = R I + Ui U F = RF IF Gleichstrommaschine Induzierte Spannung: Ursache: Änderung des magnetischen Flusses in der Leiterschleife Ui = c φf Erzeugung des magnetischen Flusses:
Gleichstrommaschine i F F F F U = R I + Ui U F = RF IF Gleichstrommaschine Induzierte Spannung: Ursache: Änderung des magnetischen Flusses in der Leiterschleife Ui = c φf Erzeugung des magnetischen Flusses:
Gleichstrommaschinen. Auf dem Anker sind viele in Reihe geschalten Spulen, dadurch sinkt die Welligkeit der Gleichspannung.
 Matura Komplementärfragen Gleichstrommaschinen Allgemeines zu Spannungserzeugung im Magnetfeld: Die Ankerwicklung wird im Magnetfeld der feststehenden Aussenpole gedreht und dadurch wird eine Spannung
Matura Komplementärfragen Gleichstrommaschinen Allgemeines zu Spannungserzeugung im Magnetfeld: Die Ankerwicklung wird im Magnetfeld der feststehenden Aussenpole gedreht und dadurch wird eine Spannung
Ausgewählte Kapitel der Energieelektronik 1, Fach Nr. 5931. Asynchronmaschinen
 Ausgewählte Kapitel der Energieelektronik 1, Fach Nr. 5931 Prof. Dr.-Ing. H. Alt Asynchronmaschinen Der Asynchronmotor ist der am meisten verwendete Industriemotor. Er kann direkt (mit Motorschutzschalter)
Ausgewählte Kapitel der Energieelektronik 1, Fach Nr. 5931 Prof. Dr.-Ing. H. Alt Asynchronmaschinen Der Asynchronmotor ist der am meisten verwendete Industriemotor. Er kann direkt (mit Motorschutzschalter)
Lernkontrolle Motoren
 Lernkontrolle Motoren Zeit 45 Min. 40 40 Pkt. Hinweise Wird nicht benotet! Lösen Sie die Aufgaben auf separatem Papier. Ich wünsche Ihnen viel Erfolg! Aufgabenstellung 1. Wie kann Dreiphasenwechselstrom
Lernkontrolle Motoren Zeit 45 Min. 40 40 Pkt. Hinweise Wird nicht benotet! Lösen Sie die Aufgaben auf separatem Papier. Ich wünsche Ihnen viel Erfolg! Aufgabenstellung 1. Wie kann Dreiphasenwechselstrom
Der richtige Dreh für Ihre Maschine 1FW6
 Der richtige Dreh für Ihre Maschine torquemotoror 1FW6 Reibungslos zu mehr Dynamik und Präzision Zunehmend höhere Genauigkeiten bei einem immer höheren Drehmoment sind die Anforderungen der Werkzeugmaschinen-
Der richtige Dreh für Ihre Maschine torquemotoror 1FW6 Reibungslos zu mehr Dynamik und Präzision Zunehmend höhere Genauigkeiten bei einem immer höheren Drehmoment sind die Anforderungen der Werkzeugmaschinen-
Theoretische Grundlagen
 Theoretische Grundlagen m eistungsbereich oberhalb 0,75 kw ("integral horsepower") sind etwa 7% der gefertigten elektrischen Maschinen Gleichstrommaschinen. Haupteinsatzgebiete sind Hüttenund Walzwerke,
Theoretische Grundlagen m eistungsbereich oberhalb 0,75 kw ("integral horsepower") sind etwa 7% der gefertigten elektrischen Maschinen Gleichstrommaschinen. Haupteinsatzgebiete sind Hüttenund Walzwerke,
Workshop Lichtmaschine BMW 69-96. 31.01.2015 Rhein-Main
 Workshop Lichtmaschine BMW 69-96 31.01.2015 Rhein-Main Hans-Günter Kahl Stand 14.03.2015 Seite 1 Ziel des Workshop Verständnis für Aufbau und Funktion der Lichtmaschine (LiMa) zur nachgelagerten Entstörung
Workshop Lichtmaschine BMW 69-96 31.01.2015 Rhein-Main Hans-Günter Kahl Stand 14.03.2015 Seite 1 Ziel des Workshop Verständnis für Aufbau und Funktion der Lichtmaschine (LiMa) zur nachgelagerten Entstörung
4.12 Elektromotor und Generator
 4.12 Elektromotor und Generator Elektromotoren und Generatoren gehören neben der Erfindung der Dampfmaschine zu den wohl größten Erfindungen der Menschheitsgeschichte. Die heutige elektrifizierte Welt
4.12 Elektromotor und Generator Elektromotoren und Generatoren gehören neben der Erfindung der Dampfmaschine zu den wohl größten Erfindungen der Menschheitsgeschichte. Die heutige elektrifizierte Welt
Bundestechnologiezentrum für Elektro- und Informationstechnik e.v.
 Lernprogramm Grundlagen der Elektrotechnik 4 Themenübersicht Magnetismus Dauermagnetismus Einführung Historisches Einteilung Magnetismus Eigenschaften von Magneten Erde / Sonne Prinzip Grundbegriffe und
Lernprogramm Grundlagen der Elektrotechnik 4 Themenübersicht Magnetismus Dauermagnetismus Einführung Historisches Einteilung Magnetismus Eigenschaften von Magneten Erde / Sonne Prinzip Grundbegriffe und
Einführung in die Physik II für Studierende der Naturwissenschaften und Zahnheilkunde. Sommersemester 2007. VL #29 am 19.06.2007.
 Einführung in die Physik II für Studierende der Naturwissenschaften und Zahnheilkunde Sommersemester 2007 VL #29 am 19.06.2007 Vladimir Dyakonov Induktionsspannung Bewegung der Leiterschleife im homogenen
Einführung in die Physik II für Studierende der Naturwissenschaften und Zahnheilkunde Sommersemester 2007 VL #29 am 19.06.2007 Vladimir Dyakonov Induktionsspannung Bewegung der Leiterschleife im homogenen
Dauermagnetgeneratoren (DMG)
") Dauermagnetgeneratoren (DMG) Was ist ein DMG? B e i e i n e m Dauermagnetgenerator handelt es sich um einen Synchrongenerator, bei dem die normalerweise im Rotor stattfindende Erregerwicklung durch e i
Dauermagnetgeneratoren (DMG) Was ist ein DMG? B e i e i n e m Dauermagnetgenerator handelt es sich um einen Synchrongenerator, bei dem die normalerweise im Rotor stattfindende Erregerwicklung durch e i
Fragebogen Auswahl Schrittmotor-System
 Fragebogen Auswahl Schrittmotor-System Inhaltsverzeichnis 1 Einleitung... 3 2 Anwendung / Anordnung / Konfiguration... 3 3 Abmessungen... 4 4 Umgebung... 4 4.1 Temperatur... 4 5 Mechanische Last... 4 5.1
Fragebogen Auswahl Schrittmotor-System Inhaltsverzeichnis 1 Einleitung... 3 2 Anwendung / Anordnung / Konfiguration... 3 3 Abmessungen... 4 4 Umgebung... 4 4.1 Temperatur... 4 5 Mechanische Last... 4 5.1
CNC Tischfräsmaschine POSITECH
 Verfahrweg: X-Achse : 510 mm Y-Achse : 367 mm Z-Achse : 150 mm Maschine Betriebsbereit: Rechner mit WIN-XP, Bildschirm, Tastatur, Maus Maschinensoftware MACH3-REL67 CAM Software Sheetcam Frässpindel: ELTE
Verfahrweg: X-Achse : 510 mm Y-Achse : 367 mm Z-Achse : 150 mm Maschine Betriebsbereit: Rechner mit WIN-XP, Bildschirm, Tastatur, Maus Maschinensoftware MACH3-REL67 CAM Software Sheetcam Frässpindel: ELTE
Experimentiersatz Elektromotor
 Experimentiersatz Elektromotor Demonstration der Erzeugung von elektrischem Stromfluss durch Umwandlung von mechanischer Energie (Windrad) in elektrische Energie. Einführung Historisch gesehen hat die
Experimentiersatz Elektromotor Demonstration der Erzeugung von elektrischem Stromfluss durch Umwandlung von mechanischer Energie (Windrad) in elektrische Energie. Einführung Historisch gesehen hat die
Untersynchrone Stromrichterkaskade USK
 Untersynchrone Stromrichterkaskade USK Allgemeines Die unbestrittenen Vorteile des Drehstrom-Asynchronmotors gegenüber Gleichstrommotoren führten schon frühzeitig zu Bemühungen, die Drehstrommaschine
Untersynchrone Stromrichterkaskade USK Allgemeines Die unbestrittenen Vorteile des Drehstrom-Asynchronmotors gegenüber Gleichstrommotoren führten schon frühzeitig zu Bemühungen, die Drehstrommaschine
TRAVEL POWER 230 V AC, 32 A, 50 Hz (991 00 12-01) Travel Power 7.0 + 5.0
 Travel Power 7.0 + 5.0") Einbau und Bedienungsanleitung TRAVEL POWER 230 V AC, 32 A, 50 Hz (991 00 12-01) Travel Power 7.0 + 5.0 1 Allgemeine Informationen 1.1 SICHERHEITSHINWEISE Travel Power darf nicht für den Betrieb von lebenserhaltenen
Einbau und Bedienungsanleitung TRAVEL POWER 230 V AC, 32 A, 50 Hz (991 00 12-01) Travel Power 7.0 + 5.0 1 Allgemeine Informationen 1.1 SICHERHEITSHINWEISE Travel Power darf nicht für den Betrieb von lebenserhaltenen
6 Die Synchronmaschine
 Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow 6.1.2 Prinzip 6 Die Synchronmaschine 6.1 Einführung Rotor 6.1.1 Anwendung und Einsatz Herausragende
Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow 6.1.2 Prinzip 6 Die Synchronmaschine 6.1 Einführung Rotor 6.1.1 Anwendung und Einsatz Herausragende
Rotierende Leiterschleife
 Wechselstrom Rotierende Leiterschleife B r Veränderung der Form einer Leiterschleife in einem magnetischen Feld induziert eine Spannung ( 13.1.3) A r r B zur kontinuierlichen Induktion von Spannung: periodische
Wechselstrom Rotierende Leiterschleife B r Veränderung der Form einer Leiterschleife in einem magnetischen Feld induziert eine Spannung ( 13.1.3) A r r B zur kontinuierlichen Induktion von Spannung: periodische
18. Magnetismus in Materie
 18. Magnetismus in Materie Wir haben den elektrischen Strom als Quelle für Magnetfelder kennen gelernt. Auch das magnetische Verhalten von Materie wird durch elektrische Ströme bestimmt. Die Bewegung der
18. Magnetismus in Materie Wir haben den elektrischen Strom als Quelle für Magnetfelder kennen gelernt. Auch das magnetische Verhalten von Materie wird durch elektrische Ströme bestimmt. Die Bewegung der
Elektrotechnik für Maschinenbauer. Grundlagen der Elektrotechnik für Maschinenbauer Konsultation 12: Elektrische Maschinen
 Elektrotechnik für aschinenbauer Grundlagen der Elektrotechnik für aschinenbauer Konsultation 12: Elektrische aschinen 1. Einleitung Bei den elektrischen aschinen unterscheidet man Transformatoren, Gleichstrommaschinen,
Elektrotechnik für aschinenbauer Grundlagen der Elektrotechnik für aschinenbauer Konsultation 12: Elektrische aschinen 1. Einleitung Bei den elektrischen aschinen unterscheidet man Transformatoren, Gleichstrommaschinen,
DE740-2M Motor-Generator-Einheit, Demo
 DE740-2M Motor-Generator-Einheit, Demo Versuchsanleitung INHALTSVERZEICHNIS 1. Generator ELD MG 1.1 ELD MG 1.2 ELD MG 1.3 Die rotierende Spule Wechselstromgenerator Gleichstromgenerator 2. Motor ELD MG
DE740-2M Motor-Generator-Einheit, Demo Versuchsanleitung INHALTSVERZEICHNIS 1. Generator ELD MG 1.1 ELD MG 1.2 ELD MG 1.3 Die rotierende Spule Wechselstromgenerator Gleichstromgenerator 2. Motor ELD MG
Windturbine. Für die Berechnung gilt die Referenz- Windgeschwindigkeit = 12 m/s. Flügel Umlaufgeschwindigkeit bei Lamda 2,5 = 2,5.
 Windturbine H - Rotor (Leistungsturbine) Radius = 1180 mm Durchmesser 2,36 m Höhe = 2200mm Fläche = 5,2m² Für die Berechnung gilt die Referenz- Windgeschwindigkeit = 12 m/s Umlaufgeschwindigkeit der Flügel
Windturbine H - Rotor (Leistungsturbine) Radius = 1180 mm Durchmesser 2,36 m Höhe = 2200mm Fläche = 5,2m² Für die Berechnung gilt die Referenz- Windgeschwindigkeit = 12 m/s Umlaufgeschwindigkeit der Flügel
Motorkennlinie messen
 Aktoren kennlinie messen von Roland Steffen 3387259 2004 Aktoren, kennlinie messen Roland Steffen Seite 1/5 Aufgabenstellung: Von einer Elektromotor-Getriebe-Einheit ist eine vollständige kennlinienschar
Aktoren kennlinie messen von Roland Steffen 3387259 2004 Aktoren, kennlinie messen Roland Steffen Seite 1/5 Aufgabenstellung: Von einer Elektromotor-Getriebe-Einheit ist eine vollständige kennlinienschar
1. Kennlinien. 2. Stabilisierung der Emitterschaltung. Schaltungstechnik 2 Übung 4
 1. Kennlinien Der Transistor BC550C soll auf den Arbeitspunkt U CE = 4 V und I C = 15 ma eingestellt werden. a) Bestimmen Sie aus den Kennlinien (S. 2) die Werte für I B, B, U BE. b) Woher kommt die Neigung
1. Kennlinien Der Transistor BC550C soll auf den Arbeitspunkt U CE = 4 V und I C = 15 ma eingestellt werden. a) Bestimmen Sie aus den Kennlinien (S. 2) die Werte für I B, B, U BE. b) Woher kommt die Neigung
REGELUNG EINER PMSM (SPARK) FÜR EINE WINDKRAFTANLAGE
 FÜR EINE WINDKRAFTANLAGE") Regelung einer PMSM (SPARK) für eine Windkraftanlage 1 REGELUNG EINER PMSM (SPARK) FÜR EINE WINDKRAFTANLAGE F. Turki 1 EINFÜHRUNG Alternative Stromversorgungen werden immer attraktiver und eine der saubersten
Regelung einer PMSM (SPARK) für eine Windkraftanlage 1 REGELUNG EINER PMSM (SPARK) FÜR EINE WINDKRAFTANLAGE F. Turki 1 EINFÜHRUNG Alternative Stromversorgungen werden immer attraktiver und eine der saubersten
Grundlagen der Elektrotechnik 2 für WIng Teil 2 S.2
 Teil 2 S.1 1 2 3 4 5 6 7 8 Summe Note 20 10 13 10 6 8 14 24 105............ Name Vorname Matr.-Nr. Unterschrift Zugelassene Hilfsmittel: Taschenrechner, Zeichenmaterial 2 Blätter = 4 Seiten selbst geschriebene
Teil 2 S.1 1 2 3 4 5 6 7 8 Summe Note 20 10 13 10 6 8 14 24 105............ Name Vorname Matr.-Nr. Unterschrift Zugelassene Hilfsmittel: Taschenrechner, Zeichenmaterial 2 Blätter = 4 Seiten selbst geschriebene
1. Theorie: Kondensator:
 1. Theorie: Aufgabe des heutigen Versuchstages war es, die charakteristische Größe eines Kondensators (Kapazität C) und einer Spule (Induktivität L) zu bestimmen, indem man per Oszilloskop Spannung und
1. Theorie: Aufgabe des heutigen Versuchstages war es, die charakteristische Größe eines Kondensators (Kapazität C) und einer Spule (Induktivität L) zu bestimmen, indem man per Oszilloskop Spannung und
1. Allgemeines. 1.1. Verwendete Geräte. Geräte-Platz 11
 1. Allgemeines...2 1.1. Verwendete Geräte... 2 1.2. Messgeräte:... 3 2. Asynchronmotor...4 2.1. Aufgabenstellung... 4 2.2. Messaufbau... 4 2.3. Vorgangsweise... 5 3. Gleichstrommotor - Drehmoment-Drehzahl-Kennlinie...8
1. Allgemeines...2 1.1. Verwendete Geräte... 2 1.2. Messgeräte:... 3 2. Asynchronmotor...4 2.1. Aufgabenstellung... 4 2.2. Messaufbau... 4 2.3. Vorgangsweise... 5 3. Gleichstrommotor - Drehmoment-Drehzahl-Kennlinie...8
BASIC-Tiger Application Note No. 018 Rev. 1.0. Ansteuerung von Schrittmotoren. Gunther Zielosko. 1. Grundlagen
 Ansteuerung von Schrittmotoren Gunther Zielosko 1. Grundlagen Eine besonders reizvolle Aufgabe für das Arbeiten und Entwickeln mit Mikrorechnern ist die Steuerung von mechanischen Baugruppen. Wenn präzise,
Ansteuerung von Schrittmotoren Gunther Zielosko 1. Grundlagen Eine besonders reizvolle Aufgabe für das Arbeiten und Entwickeln mit Mikrorechnern ist die Steuerung von mechanischen Baugruppen. Wenn präzise,
Koppelung von Struktur und Steuerung. Rapperswil. 23. Januar 2014. Elektromechanische Auslegung von Werkzeugmaschinen.
 Koppelung von Struktur und Steuerung Rapperswil 23. Januar 2014 Elektromechanische Auslegung von Werkzeugmaschinen GF AgieCharmilles Jan Konvicka / FE Inhaltsverzeichnis 1 Der Entwicklungsprozess 3 2 Maschinen-
Koppelung von Struktur und Steuerung Rapperswil 23. Januar 2014 Elektromechanische Auslegung von Werkzeugmaschinen GF AgieCharmilles Jan Konvicka / FE Inhaltsverzeichnis 1 Der Entwicklungsprozess 3 2 Maschinen-
Jedes Umfeld hat seinen perfekten Antrieb. Individuelle Antriebslösungen für Windenergieanlagen.
 Jedes Umfeld hat seinen perfekten Antrieb. Individuelle Antriebslösungen für Windenergieanlagen. 1 2 3 3 4 1 2 3 4 Generator Elektromechanische Bremse Azimutantriebe Rotorlock-Antrieb (im Bild nicht sichtbar)
Jedes Umfeld hat seinen perfekten Antrieb. Individuelle Antriebslösungen für Windenergieanlagen. 1 2 3 3 4 1 2 3 4 Generator Elektromechanische Bremse Azimutantriebe Rotorlock-Antrieb (im Bild nicht sichtbar)
Elbtalwerk GmbH. Universität Karlsruhe Elektrotechnisches Institut. Geschalteter Reluktanzmotor. Drehmomentstarker Elektromotor mit kleinem Bauvolumen
 Elbtalwerk GmbH Geschalteter Reluktanzmotor Drehmomentstarker Elektromotor mit kleinem Bauvolumen Strom B1 Wicklung A1 D4 C1 C4 Pol D1 Drehung B4 A2 Rotorzahn Welle A4 B2 Feldlinie D3 C2 C3 D2 Stator A3
Elbtalwerk GmbH Geschalteter Reluktanzmotor Drehmomentstarker Elektromotor mit kleinem Bauvolumen Strom B1 Wicklung A1 D4 C1 C4 Pol D1 Drehung B4 A2 Rotorzahn Welle A4 B2 Feldlinie D3 C2 C3 D2 Stator A3
Wicklungen von Gleichstrommaschinen Windings of d. c. machines
 Wicklungen von Gleichstrommaschinen Windings of d. c. machines Ständerwicklung Feld- und Wendepolwicklung als Zylinderspulen ausgeführt. Feldwicklung so anschließen, dass eine wechselnde Polfolge entsteht.
Wicklungen von Gleichstrommaschinen Windings of d. c. machines Ständerwicklung Feld- und Wendepolwicklung als Zylinderspulen ausgeführt. Feldwicklung so anschließen, dass eine wechselnde Polfolge entsteht.
6. Synchronmaschine. EM1, Kovalev/Novender/Kern (Fachbereich IEM)
") 1 Prinzipielle Wirkungsweise Außenpolgenerator: Erregung außen; fest Spannungsinduktion innen; rotiert Energieübertragung mittels Schleifringe 2 Prinzipielle Wirkungsweise Außenpolmaschine: Erregung hier
1 Prinzipielle Wirkungsweise Außenpolgenerator: Erregung außen; fest Spannungsinduktion innen; rotiert Energieübertragung mittels Schleifringe 2 Prinzipielle Wirkungsweise Außenpolmaschine: Erregung hier
Versuch EA.. (Theorie) Betriebsverhalten des Schrittmotors
 Betriebsverhalten des Schrittmotors") 1 FH Stralsund Fachbereich Elektrotechnik und Informatik Praktikum im Fach Elektrische Antriebstechnik Versuch EA.. (Theorie) Betriebsverhalten des Schrittmotors Versuchsziel: Aufbau, Wirkungsweise und
1 FH Stralsund Fachbereich Elektrotechnik und Informatik Praktikum im Fach Elektrische Antriebstechnik Versuch EA.. (Theorie) Betriebsverhalten des Schrittmotors Versuchsziel: Aufbau, Wirkungsweise und
1.2 Beispiele mechatronischer Komponenten in Werkzeugmaschinen... 3
 Formelzeichen und Abkürzungen XVII 1 Einleitung 1 1.1 Begriffsbestimmung mechatronische Systeme" 2 1.2 Beispiele mechatronischer Komponenten in Werkzeugmaschinen... 3 1.3 Weiterentwicklungen 5 2 Aufbau
Formelzeichen und Abkürzungen XVII 1 Einleitung 1 1.1 Begriffsbestimmung mechatronische Systeme" 2 1.2 Beispiele mechatronischer Komponenten in Werkzeugmaschinen... 3 1.3 Weiterentwicklungen 5 2 Aufbau
Inhaltsverzeichnis. Formelzeichen und Abkürzungen...
 Inhaltsverzeichnis Formelzeichen und Abkürzungen................................ XV 1 Einleitung................................................ 1 1.1 Begriffsbestimmung mechatronische Systeme...............
Inhaltsverzeichnis Formelzeichen und Abkürzungen................................ XV 1 Einleitung................................................ 1 1.1 Begriffsbestimmung mechatronische Systeme...............
Elektrische Kühlmittelpumpen. Immer richtig temperiert
 Elektrische Kühlmittelpumpen Immer richtig temperiert Elektrische Kühlmittelpumpen Konventionelle Kühlmittelpumpen zur Motorkühlung werden über Zahnriemen angetrieben mit fester Kopplung an die Motordrehzahl.
Elektrische Kühlmittelpumpen Immer richtig temperiert Elektrische Kühlmittelpumpen Konventionelle Kühlmittelpumpen zur Motorkühlung werden über Zahnriemen angetrieben mit fester Kopplung an die Motordrehzahl.
Aufgaben Wechselstromwiderstände
 Aufgaben Wechselstromwiderstände 69. Eine aus Übersee mitgebrachte Glühlampe (0 V/ 50 ma) soll mithilfe einer geeignet zu wählenden Spule mit vernachlässigbarem ohmschen Widerstand an der Netzsteckdose
Aufgaben Wechselstromwiderstände 69. Eine aus Übersee mitgebrachte Glühlampe (0 V/ 50 ma) soll mithilfe einer geeignet zu wählenden Spule mit vernachlässigbarem ohmschen Widerstand an der Netzsteckdose
Komplexpraktikum Elektrotechnik - Elektrische Antriebe. Umrichtergespeister Drehstromantrieb
 April 2012 Komplexpraktikum Elektrotechnik - Elektrische Antriebe Umrichtergespeister Drehstromantrieb für tudiengang CT/AT, Fakultät ET 1. Versuchsziel ie lernen das stationäre Betriebsverhalten eines
April 2012 Komplexpraktikum Elektrotechnik - Elektrische Antriebe Umrichtergespeister Drehstromantrieb für tudiengang CT/AT, Fakultät ET 1. Versuchsziel ie lernen das stationäre Betriebsverhalten eines
Fachbereich Physik Dr. Wolfgang Bodenberger
 UniversitätÉOsnabrück Fachbereich Physik Dr. Wolfgang Bodenberger Der Transistor als Schalter. In vielen Anwendungen der Impuls- und Digital- lektronik wird ein Transistor als einfacher in- und Aus-Schalter
UniversitätÉOsnabrück Fachbereich Physik Dr. Wolfgang Bodenberger Der Transistor als Schalter. In vielen Anwendungen der Impuls- und Digital- lektronik wird ein Transistor als einfacher in- und Aus-Schalter
Aufg. P max 1 10 Klausur "Elektrotechnik" 2 14 3 8 4 10 am 14.03.1997
 Name, Vorname: Matr.Nr.: Hinweise zur Klausur: Aufg. P max 1 10 Klausur "Elektrotechnik" 2 14 3 8 6141 4 10 am 14.03.1997 5 18 6 11 Σ 71 N P Die zur Verfügung stehende Zeit beträgt 1,5 h. Zugelassene Hilfsmittel
Name, Vorname: Matr.Nr.: Hinweise zur Klausur: Aufg. P max 1 10 Klausur "Elektrotechnik" 2 14 3 8 6141 4 10 am 14.03.1997 5 18 6 11 Σ 71 N P Die zur Verfügung stehende Zeit beträgt 1,5 h. Zugelassene Hilfsmittel
Elektrische Maschinen und Antriebe
 Andreas Binder Elektrische Maschinen und Antriebe Übungsbuch: n mit Lösungsweg Springe] Inhaltsverzeichnis Inhaltsverzeichnis 1. Grundlagen Energiewandler 1 Magnetischer Eisenkreis 1 A1.2: Ruhinduktion
Andreas Binder Elektrische Maschinen und Antriebe Übungsbuch: n mit Lösungsweg Springe] Inhaltsverzeichnis Inhaltsverzeichnis 1. Grundlagen Energiewandler 1 Magnetischer Eisenkreis 1 A1.2: Ruhinduktion
Werkstoffe elektrischer Stromkreise
 1.2 Werkstoffe elektrischer Maschinen Seite 1 Jede Maschine besteht grundsätzlich aus elektrischen Stromkreisen magnetischen Kreisen Werkstoffe elektrischer Stromkreise In Wicklungen einer Maschine wird
1.2 Werkstoffe elektrischer Maschinen Seite 1 Jede Maschine besteht grundsätzlich aus elektrischen Stromkreisen magnetischen Kreisen Werkstoffe elektrischer Stromkreise In Wicklungen einer Maschine wird
Komaxl - Savonius Vertikalachsen-Windrotoren und Generatoren
 Komaxl - Savonius Vertikalachsen-Windrotoren und Generatoren Die Windrotoren haben in Verbindung mit einem Scheiben- Generator kein magnetisches Rastmoment oder Haltemoment, hierdurch wird ein Anlaufen
Komaxl - Savonius Vertikalachsen-Windrotoren und Generatoren Die Windrotoren haben in Verbindung mit einem Scheiben- Generator kein magnetisches Rastmoment oder Haltemoment, hierdurch wird ein Anlaufen
Entladen und Aufladen eines Kondensators über einen ohmschen Widerstand
 Entladen und Aufladen eines Kondensators über einen ohmschen Widerstand Vorüberlegung In einem seriellen Stromkreis addieren sich die Teilspannungen zur Gesamtspannung Bei einer Gesamtspannung U ges, der
Entladen und Aufladen eines Kondensators über einen ohmschen Widerstand Vorüberlegung In einem seriellen Stromkreis addieren sich die Teilspannungen zur Gesamtspannung Bei einer Gesamtspannung U ges, der
Übungsaufgaben zum 5. Versuch 13. Mai 2012
 Übungsaufgaben zum 5. Versuch 13. Mai 2012 1. In der folgenden Schaltung wird ein Transistor als Schalter betrieben (Kennlinien s.o.). R b I b U b = 15V R c U e U be Damit der Transistor möglichst schnell
Übungsaufgaben zum 5. Versuch 13. Mai 2012 1. In der folgenden Schaltung wird ein Transistor als Schalter betrieben (Kennlinien s.o.). R b I b U b = 15V R c U e U be Damit der Transistor möglichst schnell
FET-Ausarbeitung von Zimmermann Markus Seite 1 Threma: Elektrisches Messen. 1. Elektrisches Messen: 1.1. Allgemeines zu Messen:
 FET-Ausarbeitung von Zimmermann Markus Seite 1 1. Elektrisches Messen: 1.1. Allgemeines zu Messen: Messen ist im weitesten Sinne die Feststellung des Istzustandes einer Größe. Meßvorgänge liefern die Informationen,
FET-Ausarbeitung von Zimmermann Markus Seite 1 1. Elektrisches Messen: 1.1. Allgemeines zu Messen: Messen ist im weitesten Sinne die Feststellung des Istzustandes einer Größe. Meßvorgänge liefern die Informationen,
FREQUENZUMRICHTER ANTRIEBE (Spannungs-Frequenz-Steuerung) Versuchsaufgabe
 Versuchsaufgabe") Fachhochschule raktikum Versuch AS2 Bielefeld Leistungselektronik und Antriebe rof. Dr. Hofer FB Elektrotechnik Regelungstechnik und Leistungselektronik FREQUENZUMRICHTER ANTRIEBE (Spannungs-Frequenz-Steuerung)
Fachhochschule raktikum Versuch AS2 Bielefeld Leistungselektronik und Antriebe rof. Dr. Hofer FB Elektrotechnik Regelungstechnik und Leistungselektronik FREQUENZUMRICHTER ANTRIEBE (Spannungs-Frequenz-Steuerung)
Physikalische Grundlagen zur Betrachtung der Funktionalität des resonanten Synchrongenerators QEG Revision 1c
 Physikalische Grundlagen zur Betrachtung der Funktionalität des resonanten Synchrongenerators QEG Revision 1c 23.04.14 Alex-L Hinweis: Diese Beschreibung ist für Ingenieure gedacht, welche mit dem Induktionsgesetz
Physikalische Grundlagen zur Betrachtung der Funktionalität des resonanten Synchrongenerators QEG Revision 1c 23.04.14 Alex-L Hinweis: Diese Beschreibung ist für Ingenieure gedacht, welche mit dem Induktionsgesetz
Ziehl-Abegg AG. Dieter Rieger. Leiter Marketing & Vertrieb Geschäftsbereich Antriebstechnik. Technik der Getriebelose Aufzugsmaschine
 Version 1.0 Oktober 2005 Ziehl-Abegg AG Technik der Getriebelose Aufzugsmaschine Dieter Rieger Leiter Marketing & Vertrieb Geschäftsbereich Antriebstechnik Heinz-Ziehl-Straße 74653 Künzelsau Telefon: +49
Version 1.0 Oktober 2005 Ziehl-Abegg AG Technik der Getriebelose Aufzugsmaschine Dieter Rieger Leiter Marketing & Vertrieb Geschäftsbereich Antriebstechnik Heinz-Ziehl-Straße 74653 Künzelsau Telefon: +49
Messung 2 MESSUNG DER WELLENLEISTUNG UND DES WIRKUNGSGRADES (PENDELMASCHINEN)
") Messung 2 MESSUNG DER WELLENLEISTUNG UND DES WIRKUNGSGRADES (PENDELMASCHINEN). Einleitung Kraftmaschinen geben ihre Arbeit meistens durch rotierende Wellen ab. Die Arbeit, die pro Zeiteinheit über die
Messung 2 MESSUNG DER WELLENLEISTUNG UND DES WIRKUNGSGRADES (PENDELMASCHINEN). Einleitung Kraftmaschinen geben ihre Arbeit meistens durch rotierende Wellen ab. Die Arbeit, die pro Zeiteinheit über die
1. Definition des elektrischen Direktantriebs... 1 1.1. Vor- und Nachteile von Direktantrieben... 5 1.2. Zusammenfassung... 7
 Inhaltsverzeichnis 1. Definition des elektrischen Direktantriebs... 1 1.1. Vor- und Nachteile von Direktantrieben... 5 1.2. Zusammenfassung... 7 2. Der lineare Direktantrieb... 9 2.1. Lineare Motoren...
Inhaltsverzeichnis 1. Definition des elektrischen Direktantriebs... 1 1.1. Vor- und Nachteile von Direktantrieben... 5 1.2. Zusammenfassung... 7 2. Der lineare Direktantrieb... 9 2.1. Lineare Motoren...
JetMove 2xx Versions-Update von V2.13 auf V2.14
 JetMove 2xx Versions-Update von V2.13 auf V2.14 Auflage 1.00 11.06.2012/ Printed in Germany Versions-Update von V2.13 auf V2.14 JetMove 2xx 11.06.2012 Die Firma JETTER AG behält sich das Recht vor, Änderungen
JetMove 2xx Versions-Update von V2.13 auf V2.14 Auflage 1.00 11.06.2012/ Printed in Germany Versions-Update von V2.13 auf V2.14 JetMove 2xx 11.06.2012 Die Firma JETTER AG behält sich das Recht vor, Änderungen
Motor Generator (AHS 7. Klasse)
") Physikalisches Schulversuchspraktikum Motor Generator 1/12 Übungsdatum: 29.11.2001 Abgabetermin: 06.12.2001 Physikalisches Schulversuchspraktikum Motor Generator (AHS 7. Klasse) Mittendorfer Stephan Matr.
Physikalisches Schulversuchspraktikum Motor Generator 1/12 Übungsdatum: 29.11.2001 Abgabetermin: 06.12.2001 Physikalisches Schulversuchspraktikum Motor Generator (AHS 7. Klasse) Mittendorfer Stephan Matr.
Wechselstrom. Versuch 1a Wechselstromgenerator Dynamo Leerlauf. Wasser. Dynamo. Klemme. Oszilloskop (alt) Loch. 5 V/cm 1 ms
 Loch. 5 V/cm 1 ms") Versuch 1a Wechselstromgenerator Dynamo Leerlauf Dynamo Wasser Klemme Loch Oszilloskop (alt) y-shift time 5 V/cm 1 ms Generatorprinzip: Rotiert eine Leiterschleife (Spule) mit konstanter Winkelgeschwindigkeit
Versuch 1a Wechselstromgenerator Dynamo Leerlauf Dynamo Wasser Klemme Loch Oszilloskop (alt) y-shift time 5 V/cm 1 ms Generatorprinzip: Rotiert eine Leiterschleife (Spule) mit konstanter Winkelgeschwindigkeit
P = U eff I eff. I eff = = 1 kw 120 V = 1000 W
 Sie haben für diesen 50 Minuten Zeit. Die zu vergebenen Punkte sind an den Aufgaben angemerkt. Die Gesamtzahl beträgt 20 P + 1 Formpunkt. Bei einer Rechnung wird auf die korrekte Verwendung der Einheiten
Sie haben für diesen 50 Minuten Zeit. Die zu vergebenen Punkte sind an den Aufgaben angemerkt. Die Gesamtzahl beträgt 20 P + 1 Formpunkt. Bei einer Rechnung wird auf die korrekte Verwendung der Einheiten
Die Elektrische Versorgung Der Honda XL 600 R (PD03)
") Die Elektrische Versorgung Der Honda XL 600 R (PD03) Die Quelle der elektrischen Energie der PD03 ist wie an jedem Motorrad ein Gererator. Dieser Generator wird bei Kraftfahrzeugen auch als Lichtmaschine
Die Elektrische Versorgung Der Honda XL 600 R (PD03) Die Quelle der elektrischen Energie der PD03 ist wie an jedem Motorrad ein Gererator. Dieser Generator wird bei Kraftfahrzeugen auch als Lichtmaschine
Qualifikationsverfahren Montage-Elektrikerin EFZ Montage-Elektriker EFZ
 Serie 010 Berufskenntnisse schriftlich Pos. Technologische Grundlagen Qualifikationsverfahren Montage-Elektrikerin EFZ Montage-Elektriker EFZ Name, Vorname Kandidatennummer Datum......... Zeit: Hilfsmittel:
Serie 010 Berufskenntnisse schriftlich Pos. Technologische Grundlagen Qualifikationsverfahren Montage-Elektrikerin EFZ Montage-Elektriker EFZ Name, Vorname Kandidatennummer Datum......... Zeit: Hilfsmittel:
Wechselspannung, Wechselstrom, Generatoren
 Wechselspannung, Wechselstrom, Generatoren Ein Generator ist eine Maschine, die kinetische Energie in elektrische Energie umwandelt. Generatoren erzeugen durch Induktion Strom (z.b. Fahrraddynamo). Benötigt
Wechselspannung, Wechselstrom, Generatoren Ein Generator ist eine Maschine, die kinetische Energie in elektrische Energie umwandelt. Generatoren erzeugen durch Induktion Strom (z.b. Fahrraddynamo). Benötigt
Leistungselektronik und Antriebstechnik Laborberichte. Christian Burri Tobias Plüss Pascal Schwarz
 Leistungselektronik und Antriebstechnik Laborberichte Christian Burri Tobias Plüss Pascal Schwarz 26. April 2013 Inhaltsverzeichnis 1 Asynchronmaschine am Netz 3 1.1 Versuchsaufbau......................................
Leistungselektronik und Antriebstechnik Laborberichte Christian Burri Tobias Plüss Pascal Schwarz 26. April 2013 Inhaltsverzeichnis 1 Asynchronmaschine am Netz 3 1.1 Versuchsaufbau......................................
ρ = 0,055 Ωmm 2 /m (20 C)
") 134.163 Grundlagen der Elektronik - Übungsbeispiele für den 11.05.2016 Beispiel C1: Berechnen Sie den Widerstand einer Glühlampe mit einem Wolframdraht von 0,024 mm Durchmesser und 30 cm Länge bei Raumtemperatur
134.163 Grundlagen der Elektronik - Übungsbeispiele für den 11.05.2016 Beispiel C1: Berechnen Sie den Widerstand einer Glühlampe mit einem Wolframdraht von 0,024 mm Durchmesser und 30 cm Länge bei Raumtemperatur
1 Wechselstromwiderstände
 1 Wechselstromwiderstände Wirkwiderstand Ein Wirkwiderstand ist ein ohmscher Widerstand an einem Wechselstromkreis. Er lässt keine zeitliche Verzögerung zwischen Strom und Spannung entstehen, daher liegt
1 Wechselstromwiderstände Wirkwiderstand Ein Wirkwiderstand ist ein ohmscher Widerstand an einem Wechselstromkreis. Er lässt keine zeitliche Verzögerung zwischen Strom und Spannung entstehen, daher liegt
1. Berechnung von Antrieben
 Berechnung von Antrieben 1-1 1. Berechnung von Antrieben Allgemeines Mit den Gleichstrommotoren wird elektrische Energie in eine mechanische Drehbewegung umgewandelt. Dabei wird dem Netz die Leistung =
Berechnung von Antrieben 1-1 1. Berechnung von Antrieben Allgemeines Mit den Gleichstrommotoren wird elektrische Energie in eine mechanische Drehbewegung umgewandelt. Dabei wird dem Netz die Leistung =
Nerreter, Grundlagen der Elektrotechnik Carl Hanser Verlag München. 8 Schaltvorgänge
 Carl Hanser Verlag München 8 Schaltvorgänge Aufgabe 8.6 Wie lauten für R = 1 kω bei der Aufgabe 8.1 die Differenzialgleichungen und ihre Lösungen für die Spannungen u 1 und u 2 sowie für den Strom i? Aufgabe
Carl Hanser Verlag München 8 Schaltvorgänge Aufgabe 8.6 Wie lauten für R = 1 kω bei der Aufgabe 8.1 die Differenzialgleichungen und ihre Lösungen für die Spannungen u 1 und u 2 sowie für den Strom i? Aufgabe
Dabei ist der differentielle Widerstand, d.h. die Steigung der Geraden für. Fig.1: vereinfachte Diodenkennlinie für eine Si-Diode
 Dioden - Anwendungen vereinfachte Diodenkennlinie Für die meisten Anwendungen von Dioden ist die exakte Berechnung des Diodenstroms nach der Shockley-Gleichung nicht erforderlich. In diesen Fällen kann
Dioden - Anwendungen vereinfachte Diodenkennlinie Für die meisten Anwendungen von Dioden ist die exakte Berechnung des Diodenstroms nach der Shockley-Gleichung nicht erforderlich. In diesen Fällen kann
Info-Magnete TECHNISCHE ERLÄUTERUNG PROPORTIONALMAGNETE. Für den Einsatz in der Hydraulik. Inhaltsverzeichnis
 TECHNISCHE ERLÄUTERUNG PROPORTIONALMAGNETE Für den Einsatz in der Hydraulik Inhaltsverzeichnis 1 Vorwort Art der Magnete 3 Begriffserläuterung 31 Kraft 3 Elektrische Spannung 33 Widerstand 34 Elektrischer
TECHNISCHE ERLÄUTERUNG PROPORTIONALMAGNETE Für den Einsatz in der Hydraulik Inhaltsverzeichnis 1 Vorwort Art der Magnete 3 Begriffserläuterung 31 Kraft 3 Elektrische Spannung 33 Widerstand 34 Elektrischer
Motor-/Generatoraufsatz mit Kollektor Generatoraufsatz mit Schleifringen
 Elektrik Lehrwerkstätten und Berufsschule Zeughausstrasse 56 für Mechanik und Elektronik Tel. 052 267 55 42 CH-8400 Winterthur Fax 052 267 50 64 Motor-/Generatoraufsatz mit Kollektor Generatoraufsatz mit
Elektrik Lehrwerkstätten und Berufsschule Zeughausstrasse 56 für Mechanik und Elektronik Tel. 052 267 55 42 CH-8400 Winterthur Fax 052 267 50 64 Motor-/Generatoraufsatz mit Kollektor Generatoraufsatz mit
Elektrischer Widerstand
 In diesem Versuch sollen Sie die Grundbegriffe und Grundlagen der Elektrizitätslehre wiederholen und anwenden. Sie werden unterschiedlichen Verfahren zur Messung ohmscher Widerstände kennen lernen, ihren
In diesem Versuch sollen Sie die Grundbegriffe und Grundlagen der Elektrizitätslehre wiederholen und anwenden. Sie werden unterschiedlichen Verfahren zur Messung ohmscher Widerstände kennen lernen, ihren
2 Gleichstrom-Schaltungen
 für Maschinenbau und Mechatronik Carl Hanser Verlag München 2 Gleichstrom-Schaltungen Aufgabe 2.1 Berechnen Sie die Kenngrößen der Ersatzquellen. Aufgabe 2.5 Welchen Wirkungsgrad hätte die in den Aufgaben
für Maschinenbau und Mechatronik Carl Hanser Verlag München 2 Gleichstrom-Schaltungen Aufgabe 2.1 Berechnen Sie die Kenngrößen der Ersatzquellen. Aufgabe 2.5 Welchen Wirkungsgrad hätte die in den Aufgaben
3. Halbleiter und Elektronik
 3. Halbleiter und Elektronik Halbleiter sind Stoe, welche die Eigenschaften von Leitern sowie Nichtleitern miteinander vereinen. Prinzipiell sind die Elektronen in einem Kristallgitter fest eingebunden
3. Halbleiter und Elektronik Halbleiter sind Stoe, welche die Eigenschaften von Leitern sowie Nichtleitern miteinander vereinen. Prinzipiell sind die Elektronen in einem Kristallgitter fest eingebunden
Taktiles Positionieren - Einsatz von Linearmotoren in Kraft-Weg überwachten Produktionsprozessen
 Taktiles Positionieren - Einsatz von Linearmotoren in Kraft-Weg überwachten Produktionsprozessen Autor: Dipl.-Physiker W. Jung - Stand: 15.09.2015 1. Grundlagen 1.1 Aktuatoren Vergleich aufgenommener Strom
Taktiles Positionieren - Einsatz von Linearmotoren in Kraft-Weg überwachten Produktionsprozessen Autor: Dipl.-Physiker W. Jung - Stand: 15.09.2015 1. Grundlagen 1.1 Aktuatoren Vergleich aufgenommener Strom
Welche Lagen können zwei Geraden (im Raum) zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen?
 zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen?") Welche Lagen können zwei Geraden (im Raum) zueinander haben? Welche Lagen können zwei Ebenen (im Raum) zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen? Wie heiÿt
Welche Lagen können zwei Geraden (im Raum) zueinander haben? Welche Lagen können zwei Ebenen (im Raum) zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen? Wie heiÿt
SKT Hohlwellenmotoren
 SKT Hohlwellenmotoren Dauerdrehmomente: bis 560 Nm Spitzendrehmomente: bis 1500 Nm Dynamische Axialkräfte: 18 kn? 210 kn Statische Axialkräfte: 48 kn? 570 kn Durchmesser Hohlwelle: 35mm/65mm/105mm Konvektionskühlung
SKT Hohlwellenmotoren Dauerdrehmomente: bis 560 Nm Spitzendrehmomente: bis 1500 Nm Dynamische Axialkräfte: 18 kn? 210 kn Statische Axialkräfte: 48 kn? 570 kn Durchmesser Hohlwelle: 35mm/65mm/105mm Konvektionskühlung
Schieberadgetriebe Zahnräder werden in verschiedene Positionen geschoben zum ändern der Übersetzung
 Wechselradgetriebe, Verschiedene Räder können eingesetzt werden um die Übersetzung zu ändern. Dabei muss der Achsabstand an die Grösse des Zahnrades angepasst werden. Schieberadgetriebe Zahnräder werden
Wechselradgetriebe, Verschiedene Räder können eingesetzt werden um die Übersetzung zu ändern. Dabei muss der Achsabstand an die Grösse des Zahnrades angepasst werden. Schieberadgetriebe Zahnräder werden
Drehstrommotoren DR J (LSPM-Technologie) / DRL / DRK / DRM
 / DRL / DRK / DRM") Drehstrommotoren DR J (LSPM-Technologie) / Baureihe DR: Ausführung DR J (LSPM*-Technologie) NEU *Line Start Permanent Magnet Motor die Synchronmotor-Ausführung DR J (LSPM-Technologie) ist in den DR-Motorbaukasten
Drehstrommotoren DR J (LSPM-Technologie) / Baureihe DR: Ausführung DR J (LSPM*-Technologie) NEU *Line Start Permanent Magnet Motor die Synchronmotor-Ausführung DR J (LSPM-Technologie) ist in den DR-Motorbaukasten
Motion Control leicht gemacht. Kompakte auf ihre Bedürfnisse angepasste Elektronik.
 Motion Control leicht gemacht. Kompakte auf ihre Bedürfnisse angepasste Elektronik. Meistens ist man auf der Suche nach einer einfachen kostengünstigen Elektronik, welche nur die gewünschten Anforderungen
Motion Control leicht gemacht. Kompakte auf ihre Bedürfnisse angepasste Elektronik. Meistens ist man auf der Suche nach einer einfachen kostengünstigen Elektronik, welche nur die gewünschten Anforderungen
Praktikum Grundlagen der Elektrotechnik
 raktikum Grundlagen der Elektrotechnik Kondensatoren und Spulen m Wechselstromkreis (ersuch 10) Fachhochschule Fulda Fachbereich Elektrotechnik durchgeführt von (rotokollführer) zusammen mit Matrikel-Nr.
raktikum Grundlagen der Elektrotechnik Kondensatoren und Spulen m Wechselstromkreis (ersuch 10) Fachhochschule Fulda Fachbereich Elektrotechnik durchgeführt von (rotokollführer) zusammen mit Matrikel-Nr.
Einführung in. Logische Schaltungen
 Einführung in Logische Schaltungen 1/7 Inhaltsverzeichnis 1. Einführung 1. Was sind logische Schaltungen 2. Grundlegende Elemente 3. Weitere Elemente 4. Beispiel einer logischen Schaltung 2. Notation von
Einführung in Logische Schaltungen 1/7 Inhaltsverzeichnis 1. Einführung 1. Was sind logische Schaltungen 2. Grundlegende Elemente 3. Weitere Elemente 4. Beispiel einer logischen Schaltung 2. Notation von
Advanced Motion Control Techniques
 Advanced Motion Control Techniques Dipl. Ing. Jan Braun maxon motor ag Switzerland Dipl. Ing. Alexander Rudolph National Instruments Switzerland Agenda Schematiascher Aufbau Positionsregelkreis Übersicht
Advanced Motion Control Techniques Dipl. Ing. Jan Braun maxon motor ag Switzerland Dipl. Ing. Alexander Rudolph National Instruments Switzerland Agenda Schematiascher Aufbau Positionsregelkreis Übersicht
Zusatzinfo LS11. Funktionsprinzipien elektrischer Messgeräte Version vom 26. Februar 2015
 Funktionsprinzipien elektrischer Messgeräte Version vom 26. Februar 2015 1.1 analoge Messgeräte Fließt durch einen Leiter, welcher sich in einem Magnetfeld B befindet ein Strom I, so wirkt auf diesen eine
Funktionsprinzipien elektrischer Messgeräte Version vom 26. Februar 2015 1.1 analoge Messgeräte Fließt durch einen Leiter, welcher sich in einem Magnetfeld B befindet ein Strom I, so wirkt auf diesen eine
Institut für Leistungselektronik und Elektrische Antriebe. Übungen Regelungstechnik 2
 Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow Übungen Regelungstechnik 2 Inhalt der Übungen: 1. Grundlagen (Wiederholung RT1) 2. Störgrößenaufschaltung 3. Störgrößennachbildung
Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow Übungen Regelungstechnik 2 Inhalt der Übungen: 1. Grundlagen (Wiederholung RT1) 2. Störgrößenaufschaltung 3. Störgrößennachbildung
Dieses Werk ist copyrightgeschützt und darf in keiner Form vervielfältigt werden noch an Dritte weitergegeben werden. Es gilt nur für den
 1 Einleitung Die Hochspannungsgleichstromübertragung (HGÜ) gewinnt durch die Nutzung regenerativer Energien zunehmend an Bedeutung. Die Yunnan-Guangdong HGÜ in China, welche die Energie aus den Wasserkraftwerken
1 Einleitung Die Hochspannungsgleichstromübertragung (HGÜ) gewinnt durch die Nutzung regenerativer Energien zunehmend an Bedeutung. Die Yunnan-Guangdong HGÜ in China, welche die Energie aus den Wasserkraftwerken
Einführung in die Physik
 Einführung in die Physik für Pharmazeuten und Biologen (PPh) Mechanik, Elektrizitätslehre, Optik Klausur: Montag, 11.02. 2008 um 13 16 Uhr (90 min) Willstätter-HS Buchner-HS Nachklausur: Freitag, 18.04.
Einführung in die Physik für Pharmazeuten und Biologen (PPh) Mechanik, Elektrizitätslehre, Optik Klausur: Montag, 11.02. 2008 um 13 16 Uhr (90 min) Willstätter-HS Buchner-HS Nachklausur: Freitag, 18.04.
Messung der Ausgangsspannung an einem FU
 Messung der Ausgangsspannung an einem FU Referent: Werner Käsmann Fluke Deutschland GmbH w.kaesmann@fluke.com D 79286 Glottertal Leider gibt es heute noch Motoren, welche ohne Drehzahlregelung betrieben
Messung der Ausgangsspannung an einem FU Referent: Werner Käsmann Fluke Deutschland GmbH w.kaesmann@fluke.com D 79286 Glottertal Leider gibt es heute noch Motoren, welche ohne Drehzahlregelung betrieben
Projektarbeit CATIA V5 3D Differenzial
 Projektarbeit CATIA V5 3D Differenzial Von Valery Volov Differenzialgetriebe Ein Differenzialgetriebe oder kurz Differenzial genannt ist ein spezielles Planetengetriebe mit einer Standübersetzung i 0 =
Projektarbeit CATIA V5 3D Differenzial Von Valery Volov Differenzialgetriebe Ein Differenzialgetriebe oder kurz Differenzial genannt ist ein spezielles Planetengetriebe mit einer Standübersetzung i 0 =
Lehrstuhl: Elektrische Antriebe und Maschinen Prof. Dr.-Ing. Bernhard Piepenbreier Prof. Dr.-Ing. Ingo Hahn
 Lehrstuhl: Elektrische Antriebe und Maschinen Prof. Dr.-Ing. Bernhard Piepenbreier Prof. Dr.-Ing. Ingo Hahn Fächerkatalog Stand Pie 09.06.2009 Titel der Lehrveranstaltung SWS V SWS Ü WS SS Grundlagen der
Lehrstuhl: Elektrische Antriebe und Maschinen Prof. Dr.-Ing. Bernhard Piepenbreier Prof. Dr.-Ing. Ingo Hahn Fächerkatalog Stand Pie 09.06.2009 Titel der Lehrveranstaltung SWS V SWS Ü WS SS Grundlagen der
Bei Aufgaben, die mit einem * gekennzeichnet sind, können Sie neu ansetzen.
 Name: Elektrotechnik Mechatronik Abschlussprüfung E/ME-BAC/DIPL Elektronische Bauelemente SS2012 Prüfungstermin: Prüfer: Hilfsmittel: 18.7.2012 (90 Minuten) Prof. Dr.-Ing. Großmann, Prof. Dr. Frey Taschenrechner
Name: Elektrotechnik Mechatronik Abschlussprüfung E/ME-BAC/DIPL Elektronische Bauelemente SS2012 Prüfungstermin: Prüfer: Hilfsmittel: 18.7.2012 (90 Minuten) Prof. Dr.-Ing. Großmann, Prof. Dr. Frey Taschenrechner
Synchron-Getriebemotoren ETAη - DRIVE. energieeffiziente und aseptische Antriebe. d 2. s 2. e 2 P 2
 Synchron-Getriebemotoren ETAη - DRIVE energieeffiziente und aseptische Antriebe d 2 s 2 e e 2 P 2 ETAη-DRIVE Minimales Bauvolumen und hoher Systemwirkungsgrad zeichnen diesen speziell für die Nahrungsmittelund
Synchron-Getriebemotoren ETAη - DRIVE energieeffiziente und aseptische Antriebe d 2 s 2 e e 2 P 2 ETAη-DRIVE Minimales Bauvolumen und hoher Systemwirkungsgrad zeichnen diesen speziell für die Nahrungsmittelund
Geneboost Best.- Nr. 2004011. 1. Aufbau Der Stromverstärker ist in ein Isoliergehäuse eingebaut. Er wird vom Netz (230 V/50 Hz, ohne Erdung) gespeist.
 gespeist.") Geneboost Best.- Nr. 2004011 1. Aufbau Der Stromverstärker ist in ein Isoliergehäuse eingebaut. Er wird vom Netz (230 V/50 Hz, ohne Erdung) gespeist. An den BNC-Ausgangsbuchsen lässt sich mit einem störungsfreien
Geneboost Best.- Nr. 2004011 1. Aufbau Der Stromverstärker ist in ein Isoliergehäuse eingebaut. Er wird vom Netz (230 V/50 Hz, ohne Erdung) gespeist. An den BNC-Ausgangsbuchsen lässt sich mit einem störungsfreien
Versuch 3. Frequenzgang eines Verstärkers
 Versuch 3 Frequenzgang eines Verstärkers 1. Grundlagen Ein Verstärker ist eine aktive Schaltung, mit der die Amplitude eines Signals vergößert werden kann. Man spricht hier von Verstärkung v und definiert
Versuch 3 Frequenzgang eines Verstärkers 1. Grundlagen Ein Verstärker ist eine aktive Schaltung, mit der die Amplitude eines Signals vergößert werden kann. Man spricht hier von Verstärkung v und definiert
Skalierung des Ausgangssignals
 Skalierung des Ausgangssignals Definition der Messkette Zur Bestimmung einer unbekannten Messgröße, wie z.b. Kraft, Drehmoment oder Beschleunigung, werden Sensoren eingesetzt. Sensoren stehen am Anfang
Skalierung des Ausgangssignals Definition der Messkette Zur Bestimmung einer unbekannten Messgröße, wie z.b. Kraft, Drehmoment oder Beschleunigung, werden Sensoren eingesetzt. Sensoren stehen am Anfang
1 Allgemeine Grundlagen
 1 Allgemeine Grundlagen 1.1 Gleichstromkreis 1.1.1 Stromdichte Die Stromdichte in einem stromdurchflossenen Leiter mit der Querschnittsfläche A ist definiert als: j = di da di da Stromelement 1.1.2 Die
1 Allgemeine Grundlagen 1.1 Gleichstromkreis 1.1.1 Stromdichte Die Stromdichte in einem stromdurchflossenen Leiter mit der Querschnittsfläche A ist definiert als: j = di da di da Stromelement 1.1.2 Die
Lösungen für die Notevakuierung
 Lösungen für die Notevakuierung Version 1.0 Oktober 2005 Ludwig Semmler Dipl. Ing. (FH) Außendienstmitarbeiter Geschäftsbereich Antriebstechnik Geneickenerstraße 190 41238 Mönchengladbach Telefon: +49
Lösungen für die Notevakuierung Version 1.0 Oktober 2005 Ludwig Semmler Dipl. Ing. (FH) Außendienstmitarbeiter Geschäftsbereich Antriebstechnik Geneickenerstraße 190 41238 Mönchengladbach Telefon: +49