Proseminar Künstliche Intelligenz: Wahrnehmung
|
|
|
- Josef Fertig
- vor 8 Jahren
- Abrufe
Transkript
1 Proseminar Künstliche Intelligenz: Wahrnehmung Sommersemester 2011 Computer Science Department Group

2 Inhalt Department of Informatics 1 Sensoren 2 Bildverarbeitung Kantenerkennung 3D-Informationen extrahieren 3 Objekterkennung Helligkeitsbasierte Erkennung Merkmalbasierte Erkennung Posenabschätzung Erkennung in 3D Punktewolke 4 Navigation SLAM 5 Zusammenfassung

3 Outline 1 Sensoren 2 Bildverarbeitung Kantenerkennung 3D-Informationen extrahieren 3 Objekterkennung Helligkeitsbasierte Erkennung Merkmalbasierte Erkennung Posenabschätzung Erkennung in 3D Punktewolke 4 Navigation SLAM 5 Zusammenfassung

4 Sensoren Sonarsensoren Lasersensoren Kamera Mikrofon

5 Outline 1 Sensoren 2 Bildverarbeitung Kantenerkennung 3D-Informationen extrahieren 3 Objekterkennung Helligkeitsbasierte Erkennung Merkmalbasierte Erkennung Posenabschätzung Erkennung in 3D Punktewolke 4 Navigation SLAM 5 Zusammenfassung

6 Bildverarbeitung 0.01nm 1nm 100nm 1mm 1cm 1m 1km 400nm 700nm Abbildung: Spektrum sichtbares Licht Quelle: wikipedia.org 3 Intensitätswerte: 700nm (Rot), 546nm (Grün), 436nm (Blau)

7 Kantenerkennung Scharfe Änderung der Helligkeit Differenzieren um Kanten zu finden

8 Kantenerkennung

9 3D-Informationen extrahieren Bewegung (optischer Fluss) Binokulare Stereopsie Oberflächenstruktur-Gradienten

10 3D-Informationen extrahieren Schattierung Konturen (Huffman-Clowes-Labeling)

11 Outline 1 Sensoren 2 Bildverarbeitung Kantenerkennung 3D-Informationen extrahieren 3 Objekterkennung Helligkeitsbasierte Erkennung Merkmalbasierte Erkennung Posenabschätzung Erkennung in 3D Punktewolke 4 Navigation SLAM 5 Zusammenfassung

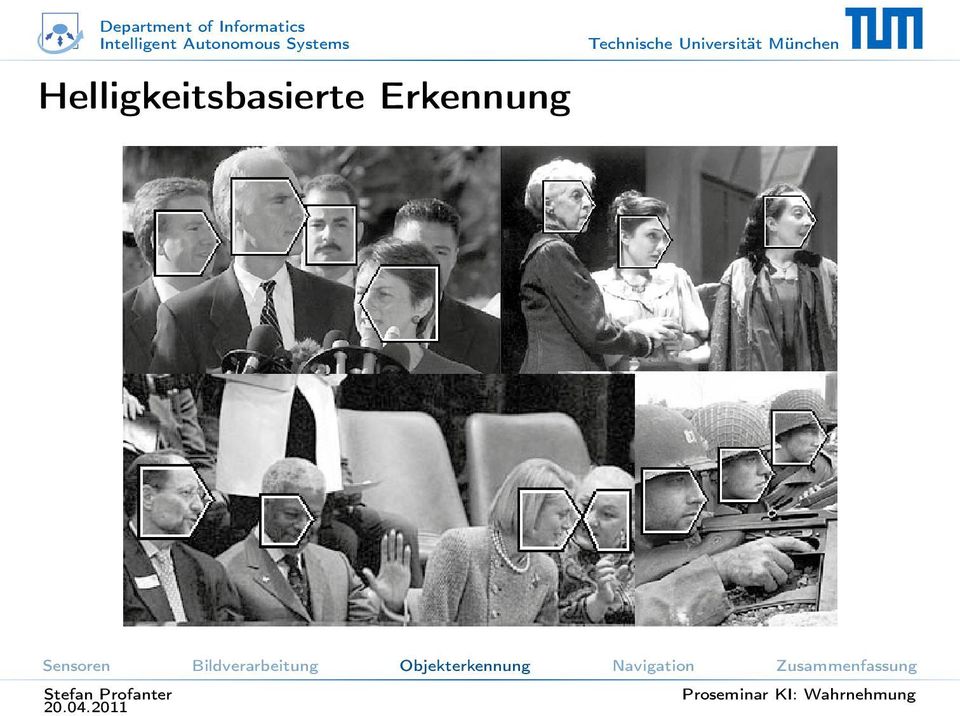
12 Helligkeitsbasierte Erkennung
13 Merkmalbasierte Erkennung Kanten und Pixelbereiche Finden von Nachbar mit kleinster Differenz: 1 Finden von identischen Punkten 2 Ausrichten (Koordinatentransformation) 3 Differenz bestimmen Beispiel: Schrifterkennung
 3 Differenz bestimmen")
14 Posenabschätzung M Merkmale in 3D: m 1,m 2,...,m M (Bsp: Ecken) R Rotationsmatrix (Drehung) t Verschiebung Π Projektion von 3D zu 2D (p 1,p 2,...,p N ) p i = Π(Rm i + t) = Q(m i ) (1)

15 Erkennung in 3D Punktewolke 3D-Laser Sensoren liefern 3D Punktewolke Erkennen von bekannten Objekten in Punktewolke

16 Outline 1 Sensoren 2 Bildverarbeitung Kantenerkennung 3D-Informationen extrahieren 3 Objekterkennung Helligkeitsbasierte Erkennung Merkmalbasierte Erkennung Posenabschätzung Erkennung in 3D Punktewolke 4 Navigation SLAM 5 Zusammenfassung

17 Navigation Selektive Informationsbeschaffung Beispiel: autonom fahrendes Auto Seitensteuerung Längssteuerung

18 SLAM Simultaneous Localization and Mapping unbekannter Ort, unbekannte Umgebung Roboter muss dynamisch eine Karte generieren

19 SLAM

20 Outline 1 Sensoren 2 Bildverarbeitung Kantenerkennung 3D-Informationen extrahieren 3 Objekterkennung Helligkeitsbasierte Erkennung Merkmalbasierte Erkennung Posenabschätzung Erkennung in 3D Punktewolke 4 Navigation SLAM 5 Zusammenfassung

21 Zusammenfassung Sensoren für Wahrnehmung Extrahieren von Tiefeninformationen Objekterkennung Anwendung: SLAM
Autonomous Systems Lab Zürich
 Philipp Krüsi 03.11.2011 Steuerung von UGVs Manuelle Fernsteuerung a) Fahrzeug in Sichtweite: Fahren auf Sicht b) Fahrzeug ausser Sicht: Steuerung mit Hilfe von Kamera-Bildern od. anderen Sensoren Autonome
Philipp Krüsi 03.11.2011 Steuerung von UGVs Manuelle Fernsteuerung a) Fahrzeug in Sichtweite: Fahren auf Sicht b) Fahrzeug ausser Sicht: Steuerung mit Hilfe von Kamera-Bildern od. anderen Sensoren Autonome
Aufbau und Kalibrierung einer redundant angetriebenen Parallelkinematik
 Modellierung Aufbau und Kalibrierung einer redundant angetriebenen Parallelkinematik Ziel: Entwicklung eines Prototypen einer PKM mit redundanten Antrieben Bewegungsgleichungen in Minimalkoordinaten (Gelenkraum,
Modellierung Aufbau und Kalibrierung einer redundant angetriebenen Parallelkinematik Ziel: Entwicklung eines Prototypen einer PKM mit redundanten Antrieben Bewegungsgleichungen in Minimalkoordinaten (Gelenkraum,
Biologisch motivierter SLAM Algorithmus
 HAW Hamburg 01. Dezember 2011 Gliederung 1 Einführung 2 RatSLAM 3 Aussicht für Master 2 / 23 Einführung Was ist SLAM SLAM bedeutet: Simultaneous Localization and Mapping Erstellung einer Karte durch mobilen
HAW Hamburg 01. Dezember 2011 Gliederung 1 Einführung 2 RatSLAM 3 Aussicht für Master 2 / 23 Einführung Was ist SLAM SLAM bedeutet: Simultaneous Localization and Mapping Erstellung einer Karte durch mobilen
Untersuchungen zur flexiblen Steuerung von Service-Robotern
 Prof. Dr.-Ing. Matthias Seitz Institut für Automatisierungssysteme Fachbereich Elektrotechnik Untersuchungen zur flexiblen Steuerung von Service-Robotern 1. Anforderungen an Service-Roboter 2. Vorteile
Prof. Dr.-Ing. Matthias Seitz Institut für Automatisierungssysteme Fachbereich Elektrotechnik Untersuchungen zur flexiblen Steuerung von Service-Robotern 1. Anforderungen an Service-Roboter 2. Vorteile
Meilenstein 3 - Abschlusspräsentation
 WPF Künstliche Intelligenz logische Agenten & Roboter Fachhochschule Köln Campus GM Meilenstein 3 - Abschlusspräsentation Gruppe Blau - Straub, Wilzopolski, Kaymak 1 Agenda 1. Agent Aktuatoren Sensoren
WPF Künstliche Intelligenz logische Agenten & Roboter Fachhochschule Köln Campus GM Meilenstein 3 - Abschlusspräsentation Gruppe Blau - Straub, Wilzopolski, Kaymak 1 Agenda 1. Agent Aktuatoren Sensoren
Übung zur Vorlesung. Digitale Bildverarbeitung. Torsten Büschenfeld. Sommersemester 2009
 Übung zur Vorlesung Digitale Bildverarbeitung Torsten Büschenfeld Institut für Informationsverarbeitung Leibniz Universität Hannover Sommersemester 2009 1 Allgemeines Organisatorisches Sprechstunde nach
Übung zur Vorlesung Digitale Bildverarbeitung Torsten Büschenfeld Institut für Informationsverarbeitung Leibniz Universität Hannover Sommersemester 2009 1 Allgemeines Organisatorisches Sprechstunde nach
Tracking Technologien für Augmented Reality
 Tracking Technologien für Augmented Reality 1 Inhalt Motivation Tracking Methoden Optisch MarkerlessTracking (kleine Wiederholung) Aktiv und Passive Marker Modellbasiertes Markerless Tracking Sensoren
Tracking Technologien für Augmented Reality 1 Inhalt Motivation Tracking Methoden Optisch MarkerlessTracking (kleine Wiederholung) Aktiv und Passive Marker Modellbasiertes Markerless Tracking Sensoren
Optimales Zusammenspiel von Kamera und Optik. Carl Zeiss AG, Udo Schellenbach, PH-V
 Trivialitäten Nicht mehr ganz so trivial Geheimwissen Welchen Stellenwert nimmt die Optik bei Bildverarbeitern oft ein? Trivialitäten: Wie groß ist der Sensor der Kamera? Deckt der Bildkreis des Objektivs
Trivialitäten Nicht mehr ganz so trivial Geheimwissen Welchen Stellenwert nimmt die Optik bei Bildverarbeitern oft ein? Trivialitäten: Wie groß ist der Sensor der Kamera? Deckt der Bildkreis des Objektivs
Bildauswertung in UAV
 Bildauswertung in UAV Prof. Dr. Nailja Luth Prof. N. Luth Emden 2014-1 OTH Ost-Bayerische Technische Hochschule Amberg-Weiden Prof. N. Luth Emden 2014-2 Prof. Dr.-Ing. N. Luth: Vorlesung Bildverarbeitung
Bildauswertung in UAV Prof. Dr. Nailja Luth Prof. N. Luth Emden 2014-1 OTH Ost-Bayerische Technische Hochschule Amberg-Weiden Prof. N. Luth Emden 2014-2 Prof. Dr.-Ing. N. Luth: Vorlesung Bildverarbeitung
Prof. Dr. Gregor Fischer Institut für Medien- und Phototechnik Fachhochschule Köln. G. Fischer
 Prof. Dr. Gregor Fischer Institut für Medien- und Phototechnik Fachhochschule Köln 1 Photographie in der Chirurgie Ziele: Dokumentation für Patient Wissenschaftliche Publikationen Bildqualität: Gleichmäßige
Prof. Dr. Gregor Fischer Institut für Medien- und Phototechnik Fachhochschule Köln 1 Photographie in der Chirurgie Ziele: Dokumentation für Patient Wissenschaftliche Publikationen Bildqualität: Gleichmäßige
Eckehard Steinbach Fachgebiet Medientechnik. Technische Universität München. EIKON e.v. Jahresversammlung
 Bildbasierte 3D Welten Eckehard Steinbach Fachgebiet Medientechnik Lehrstuhl für Kommunikationsnetze Technische Universität München EIKON e.v. Jahresversammlung 10.02.200902 2009 Traditionell: Geometrische
Bildbasierte 3D Welten Eckehard Steinbach Fachgebiet Medientechnik Lehrstuhl für Kommunikationsnetze Technische Universität München EIKON e.v. Jahresversammlung 10.02.200902 2009 Traditionell: Geometrische
Fitting 3D Models to Images
 Proseminar "Aufgabenstellungen der Bildanalyse und Mustererkennung" Fitting 3D Models to Images WS 08/09 Gliederung Einleitung Pose Consistency perspective Camera affine/projective Camera Linearkombinationen
Proseminar "Aufgabenstellungen der Bildanalyse und Mustererkennung" Fitting 3D Models to Images WS 08/09 Gliederung Einleitung Pose Consistency perspective Camera affine/projective Camera Linearkombinationen
Die dynamische Simulation bietet neben der technischen Animation von Baugruppen auch die Möglichkeit, Bewegungs- oder Kraftdiagramme auszugeben.
 Dynamische Simulation Die dynamische Simulation bietet neben der technischen Animation von Baugruppen auch die Möglichkeit, Bewegungs- oder Kraftdiagramme auszugeben. Die Übung entstammt dem Autodes-Übungspool
Dynamische Simulation Die dynamische Simulation bietet neben der technischen Animation von Baugruppen auch die Möglichkeit, Bewegungs- oder Kraftdiagramme auszugeben. Die Übung entstammt dem Autodes-Übungspool
LUMIMAX Beleuchtungsworkshop. iim AG 19.03.2015
 LUMIMAX Beleuchtungsworkshop iim AG 19.03.2015 Bedeutung der Beleuchtung Der Einfluss der Beleuchtung auf die Bildverarbeitungslösung wird häufig unterschätzt. Jede BV-Applikation benötigt ein optimales
LUMIMAX Beleuchtungsworkshop iim AG 19.03.2015 Bedeutung der Beleuchtung Der Einfluss der Beleuchtung auf die Bildverarbeitungslösung wird häufig unterschätzt. Jede BV-Applikation benötigt ein optimales
Sicherheit in eingebetteten Systemen Luxus oder Notwendigkeit?
 Sicherheit in eingebetteten Systemen Luxus oder Notwendigkeit? Dr.-Ing. Daniel Ziener Friedrich-Alexander-Universität Erlangen-Nürnberg, Lehrstuhl für Informatik 12 (Hardware-Software-Co-Design) daniel.ziener@fau.de
Sicherheit in eingebetteten Systemen Luxus oder Notwendigkeit? Dr.-Ing. Daniel Ziener Friedrich-Alexander-Universität Erlangen-Nürnberg, Lehrstuhl für Informatik 12 (Hardware-Software-Co-Design) daniel.ziener@fau.de
Proseminar Künstliche Intelligenz: Wahrnehmung Sommersemester 2011
 Proseminar Künstliche Intelligenz: Wahrnehmung Sommersemester 2011 Stefan Profanter (profante@in.tum.de) Technische Universität München, Computer Science Department Intelligent Autonomous Systems Group
Proseminar Künstliche Intelligenz: Wahrnehmung Sommersemester 2011 Stefan Profanter (profante@in.tum.de) Technische Universität München, Computer Science Department Intelligent Autonomous Systems Group
Betrachtung von Verfahren zur Posenbestimmung und Merkmalsexktraktion. Thorsten Jost INF-MA SR Wintersemester 2008/2009 1.
 Betrachtung von Verfahren zur Posenbestimmung und Merkmalsexktraktion Thorsten Jost INF-MA SR Wintersemester 2008/2009 1. Dezember 2008 Agenda Motivation Feature Detection SIFT MOPS SURF SLAM Monte Carlo
Betrachtung von Verfahren zur Posenbestimmung und Merkmalsexktraktion Thorsten Jost INF-MA SR Wintersemester 2008/2009 1. Dezember 2008 Agenda Motivation Feature Detection SIFT MOPS SURF SLAM Monte Carlo
Tracking bewegter Objekte in Videosequenzen
 Wintersemester 2009/2010 Fakultät Technik und Informatik Übersicht Aufgabenstellung Aktueller Lösungsansatz Forschung / Stand der Technik Methoden der Objekterkennung in der digitalen Bildverarbeitung
Wintersemester 2009/2010 Fakultät Technik und Informatik Übersicht Aufgabenstellung Aktueller Lösungsansatz Forschung / Stand der Technik Methoden der Objekterkennung in der digitalen Bildverarbeitung
my f lyer.de Datenblätter für Register DIN A5 mit 5 / 6 / 7 / 8 / 9 / 10 / 11 / 12 Blättern Wählen Sie bitte die passende Blattzahl aus.
 Datenblätter für DIN A mit / / / / 9 / 0 / / Blättern Wählen Sie bitte die passende Blattzahl aus. Din A, Blatt 0 ( ) ( ) (z. B. DIN A, 0 x 9 mm) Sicherheitsabstand von mm zum Rand für Objekte und Sicherheitsabstand
Datenblätter für DIN A mit / / / / 9 / 0 / / Blättern Wählen Sie bitte die passende Blattzahl aus. Din A, Blatt 0 ( ) ( ) (z. B. DIN A, 0 x 9 mm) Sicherheitsabstand von mm zum Rand für Objekte und Sicherheitsabstand
Augmented Reality als moderne Darstellungsform von Geodaten
 Augmented Reality als moderne Darstellungsform von Geodaten Mag. Sven Leitinger Salzburg Research Forschungsgesellschaft mbh Was ist Augmented Reality? Augmented Reality = erweiterte Realität "computergestützte
Augmented Reality als moderne Darstellungsform von Geodaten Mag. Sven Leitinger Salzburg Research Forschungsgesellschaft mbh Was ist Augmented Reality? Augmented Reality = erweiterte Realität "computergestützte
omnidirektionalersichtsysteme
 Diplomarbeit LokalisierungeinesmobilenRobotersystemsmittels EinprobabilistischerAnsatzfürrobuste omnidirektionalersichtsysteme BjörnGaworski bg@elien.de ArbeitsbereichTechnischeAspekteMultimodalerSysteme
Diplomarbeit LokalisierungeinesmobilenRobotersystemsmittels EinprobabilistischerAnsatzfürrobuste omnidirektionalersichtsysteme BjörnGaworski bg@elien.de ArbeitsbereichTechnischeAspekteMultimodalerSysteme
Bildverarbeitung in der Qualitätskontrolle. Sebastian Zambal LEADING INNOVATIONS
 Bildverarbeitung in der Qualitätskontrolle Sebastian Zambal LEADING INNOVATIONS Überblick Profactor Grundlagen Bildverarbeitung HW, SW, Methoden Inspektion Gussteilen Inspektion CFK, GFK Projekte EMVA-Studie:
Bildverarbeitung in der Qualitätskontrolle Sebastian Zambal LEADING INNOVATIONS Überblick Profactor Grundlagen Bildverarbeitung HW, SW, Methoden Inspektion Gussteilen Inspektion CFK, GFK Projekte EMVA-Studie:
Simulation and Visualization of Indoor-Acoustics. for Robot Control
 Simulation and Visualization of Indoor-Acoustics for Robot Control Peter Dannenmann FB Intelligente Visualisierung und Simulation (IVS), Deutsches Forschungszentrum für Künstliche Intelligenz (DFKI) Norbert
Simulation and Visualization of Indoor-Acoustics for Robot Control Peter Dannenmann FB Intelligente Visualisierung und Simulation (IVS), Deutsches Forschungszentrum für Künstliche Intelligenz (DFKI) Norbert
Projektpraktikum: Bildauswertung und fusion Wintersemester 2011 / 2012
 Projektpraktikum: Bildauswertung und fusion Wintersemester 2011 / 2012 http://www.ies.uni-karlsruhe.de Zeitlich adaptives Objekttracking in der Aufklärung und Überwachung Flugdrohne / visuell optischer
Projektpraktikum: Bildauswertung und fusion Wintersemester 2011 / 2012 http://www.ies.uni-karlsruhe.de Zeitlich adaptives Objekttracking in der Aufklärung und Überwachung Flugdrohne / visuell optischer
Telezentriefehler und seine Auswirkungen auf die Messgenauigkeit. Vision 2008. Simone Weber
 Telezentriefehler und seine Auswirkungen auf die Messgenauigkeit Vision 2008 Simone Weber Gliederung 1. Einleitung 2. Eigenschaften der telezentrischen Abbildung 3. Telezentriefehler 2ϕ 4. Quantifizierung
Telezentriefehler und seine Auswirkungen auf die Messgenauigkeit Vision 2008 Simone Weber Gliederung 1. Einleitung 2. Eigenschaften der telezentrischen Abbildung 3. Telezentriefehler 2ϕ 4. Quantifizierung
3D Umfeldrekonstruktion über Structure from Motion
 A HELLA-Group Company 3D Umfeldrekonstruktion über Structure from Motion Dr. Ralph Hänsel, Hella Aglaia Mobile Vision GmbH 11.12.2015 Symposium Beuth Hochschule Geometrische Modellierung und Computational
A HELLA-Group Company 3D Umfeldrekonstruktion über Structure from Motion Dr. Ralph Hänsel, Hella Aglaia Mobile Vision GmbH 11.12.2015 Symposium Beuth Hochschule Geometrische Modellierung und Computational
RatSLAM. Torben Becker. 24. Mai HAW Hamburg
 HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
Probleme der Navigation von Rehabilitationsroboter: Intelligenter Rollstuhl
 16.04.2013 Advanced Seminar "Computer Engineering" WS2012/2013 Probleme der Navigation von Rehabilitationsroboter: Intelligenter Rollstuhl Sandrine Michele Chouansu Lehrstuhl für Automation; Universität
16.04.2013 Advanced Seminar "Computer Engineering" WS2012/2013 Probleme der Navigation von Rehabilitationsroboter: Intelligenter Rollstuhl Sandrine Michele Chouansu Lehrstuhl für Automation; Universität
VisuellbasierteRobotik StandundPerspektiven einertechnologie. Prof.Dr.G.Sommer. Christian{Albrechts{UniversitatKiel
 VisuellbasierteRobotik StandundPerspektiven einertechnologie Prof.Dr.G.Sommer Dipl.{Inform.J.Bruske Dr.K.Daniilidis Dr.J.Pauli Christian{Albrechts{UniversitatKiel TechnologiestiftungSchleswig{Holstein
VisuellbasierteRobotik StandundPerspektiven einertechnologie Prof.Dr.G.Sommer Dipl.{Inform.J.Bruske Dr.K.Daniilidis Dr.J.Pauli Christian{Albrechts{UniversitatKiel TechnologiestiftungSchleswig{Holstein
Dokumentation SCITOS G5 Mehrebenen-Navigation und Fahrstuhlansteuerung
 Dokumentation SCITOS G5 Mehrebenen-Navigation und Fahrstuhlansteuerung Benjamin Burger & Daniel Pohlmeyer Wintersemester 2013/2014 Hinweise zum MIRA-Image: Auf dem Computer tec-raetsch-13 im RoboCup-Labor
Dokumentation SCITOS G5 Mehrebenen-Navigation und Fahrstuhlansteuerung Benjamin Burger & Daniel Pohlmeyer Wintersemester 2013/2014 Hinweise zum MIRA-Image: Auf dem Computer tec-raetsch-13 im RoboCup-Labor
Autonome Mobilität - Was wir von biologischen Systemen lernen können. Georg Färber Realzeit Computer - Systeme Technische Universität München
 Autonome Mobilität - Was wir von biologischen Systemen lernen können Georg Färber Realzeit Computer - Systeme Technische Universität München Autonome Mobilität Lernen von der Biologie Merkmals- Erkennung
Autonome Mobilität - Was wir von biologischen Systemen lernen können Georg Färber Realzeit Computer - Systeme Technische Universität München Autonome Mobilität Lernen von der Biologie Merkmals- Erkennung
(1) Problemstellung. (2) Kalman Filter
 Problemstellung. (2) Kalman Filter") Inhaltsverzeichnis (1) Problemstellung...2 (2) Kalman Filter...2 Funktionsweise... 2 Gleichungen im mehrdimensionalen Fall...3 Schätzung des Systemzustands...3 Vermuteter Schätzfehler... 3 Aktualisierung
Inhaltsverzeichnis (1) Problemstellung...2 (2) Kalman Filter...2 Funktionsweise... 2 Gleichungen im mehrdimensionalen Fall...3 Schätzung des Systemzustands...3 Vermuteter Schätzfehler... 3 Aktualisierung
MARVISION I ANWENDUNGEN / BRANCHENLÖSUNGEN IMMER DIE PASSENDE LÖSUNG FÜR IHRE AUFGABE
 + MARVISION I ANWENDUNGEN / BRANCHENLÖSUNGEN IMMER DIE PASSENDE LÖSUNG FÜR IHRE AUFGABE DIE ZWEITE DIMENSION IN DER MESSTECHNIK. OPTISCHE MESSTECHNIK VON MAHR Aktuelle Informationen zu MARVISION- Produkten
+ MARVISION I ANWENDUNGEN / BRANCHENLÖSUNGEN IMMER DIE PASSENDE LÖSUNG FÜR IHRE AUFGABE DIE ZWEITE DIMENSION IN DER MESSTECHNIK. OPTISCHE MESSTECHNIK VON MAHR Aktuelle Informationen zu MARVISION- Produkten
Adobe Flash CS4»3D-Tool«
 Flash Tutorial Philipp Nunnemann Adobe Flash CS4»3D-Tool«Im folgenden Tutorial könnt Ihr das»3d-tool«in Adobe Flash CS4 kennenlernen. Das Tool erlaubt euch, Objekte im dreidimensionalen Raum zu bewegen.
Flash Tutorial Philipp Nunnemann Adobe Flash CS4»3D-Tool«Im folgenden Tutorial könnt Ihr das»3d-tool«in Adobe Flash CS4 kennenlernen. Das Tool erlaubt euch, Objekte im dreidimensionalen Raum zu bewegen.
Telematik trifft Geomatik
 B der Welt in 3D Die Vermessung Telematik trifft Geomatik Bild: Riegl Prof. Dr. Andreas Nüchter Was ist Telematik? Die Telematik integriert interdisziplinär Methoden der Telekommunikation, der Automatisierungs-technik
B der Welt in 3D Die Vermessung Telematik trifft Geomatik Bild: Riegl Prof. Dr. Andreas Nüchter Was ist Telematik? Die Telematik integriert interdisziplinär Methoden der Telekommunikation, der Automatisierungs-technik
Probabilistisches Tracking mit dem Condensation Algorithmus
 Probabilistisches Tracking mit dem Condensation Algorithmus Seminar Medizinische Bildverarbeitung Axel Janßen Condensation - Conditional Density Propagation for Visual Tracking Michael Isard, Andrew Blake
Probabilistisches Tracking mit dem Condensation Algorithmus Seminar Medizinische Bildverarbeitung Axel Janßen Condensation - Conditional Density Propagation for Visual Tracking Michael Isard, Andrew Blake
Fachforum 1B - Entwicklung der Verkehrssicherheitstechnik Konsequenzen für die Polizei Smarte Sensorfusionssysteme im urbanen Umfeld
 Fachforum 1B - Entwicklung der Verkehrssicherheitstechnik Konsequenzen für die Polizei Smarte Sensorfusionssysteme im urbanen Umfeld Copyright Jenoptik, All rights reserved. Referenten Uwe Urban und Richard
Fachforum 1B - Entwicklung der Verkehrssicherheitstechnik Konsequenzen für die Polizei Smarte Sensorfusionssysteme im urbanen Umfeld Copyright Jenoptik, All rights reserved. Referenten Uwe Urban und Richard
Mikrocomputerkompatibles kapazitives Sensorsystem
 Mikrocomputerkompatibles kapazitives Sensorsystem Steuern http://de.wikipedia.org/wiki/steuern- Systemtheorie Regeln http://de.wikipedia.org/w/index.php?title =Datei:R_S_Block.svg&filetimestamp=201 00120131518
Mikrocomputerkompatibles kapazitives Sensorsystem Steuern http://de.wikipedia.org/wiki/steuern- Systemtheorie Regeln http://de.wikipedia.org/w/index.php?title =Datei:R_S_Block.svg&filetimestamp=201 00120131518
KoSSE-Projekt MoSeS. Modularisierte Softwaresysteme zur sensorgestützten Informationsverarbeitung
 KoSSE-Projekt MoSeS Modularisierte Softwaresysteme zur sensorgestützten Informationsverarbeitung Arbeitsgruppe Multimediale Informationsverarbeitung, Übersicht Projektpartner Ziele des Projektes Modularisiertes
KoSSE-Projekt MoSeS Modularisierte Softwaresysteme zur sensorgestützten Informationsverarbeitung Arbeitsgruppe Multimediale Informationsverarbeitung, Übersicht Projektpartner Ziele des Projektes Modularisiertes
Herausforderung Hochauflösende Inspektion. 13./14.11.2013 Thomas Schäffler
 Herausforderung Hochauflösende Inspektion 13./14.11.2013 Thomas Schäffler Agenda Herausforderung der hochauflösenden Inspektion: Große Sensoren, kleine Pixel und große Abbildungsmaßstäbe Über Qioptiq Einige
Herausforderung Hochauflösende Inspektion 13./14.11.2013 Thomas Schäffler Agenda Herausforderung der hochauflösenden Inspektion: Große Sensoren, kleine Pixel und große Abbildungsmaßstäbe Über Qioptiq Einige
ShopBot, ein Software-Agent für das Internet
 Software-Agenten p.1/20 ShopBot, ein Software-Agent für das Internet Eine Einführung in (Software-)Agenten Madeleine Theile Software-Agenten p.2/20 Aufbau des Vortrags grundlegende Theorie Definition Autonomy,
Software-Agenten p.1/20 ShopBot, ein Software-Agent für das Internet Eine Einführung in (Software-)Agenten Madeleine Theile Software-Agenten p.2/20 Aufbau des Vortrags grundlegende Theorie Definition Autonomy,
Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren.
 Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren www.joanneum.at/digital Wozu braucht mein Auto eine Karte? 2 Mensch als Fahrer: Karte wird zum Navigieren
Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren www.joanneum.at/digital Wozu braucht mein Auto eine Karte? 2 Mensch als Fahrer: Karte wird zum Navigieren
Sensor Network for Surveillance SeNSe (ISSAV)
") Sensor Network for Surveillance SeNSe (ISSAV) René Koch DIEHL BGT Defence, Überlingen 7th LEIBNIZ CONFERENCE OF ADVANCED SCIENCE - SENSORSYSTEME 2008-16. 18.10.2008 1 SeNSe Gliederung: 1. 1. Geplante Anwendung,
Sensor Network for Surveillance SeNSe (ISSAV) René Koch DIEHL BGT Defence, Überlingen 7th LEIBNIZ CONFERENCE OF ADVANCED SCIENCE - SENSORSYSTEME 2008-16. 18.10.2008 1 SeNSe Gliederung: 1. 1. Geplante Anwendung,
Wie sehen Rinder? Mit den Augen des Tieres im Stall und auf der Weide
 Wie sehen Rinder? Mit den Augen des Tieres im Stall und auf der Weide Prof. K. Reiter, Bayerische Landesanstalt für Landwirtschaft Institut für Landtechnik und Tierhaltung 23. Milchrindtag 2014 Mecklenburg-Vorpommern
Wie sehen Rinder? Mit den Augen des Tieres im Stall und auf der Weide Prof. K. Reiter, Bayerische Landesanstalt für Landwirtschaft Institut für Landtechnik und Tierhaltung 23. Milchrindtag 2014 Mecklenburg-Vorpommern
2D/3D-Bildverarbeitung in der Automatisierung
 Vision 2007 2D/3D-Bildverarbeitung in der Automatisierung Dr. Albrecht Kienemund Vorteile von Kamerasystemen mit Bildverarbeitung in der Automatisierung Adaption an manuelle Fertigungsprozesse bei Steigerung
Vision 2007 2D/3D-Bildverarbeitung in der Automatisierung Dr. Albrecht Kienemund Vorteile von Kamerasystemen mit Bildverarbeitung in der Automatisierung Adaption an manuelle Fertigungsprozesse bei Steigerung
Bildverarbeitung Herbstsemester 2012. Kanten und Ecken
 Bildverarbeitung Herbstsemester 01 Kanten und Ecken 1 Inhalt Einführung Kantendetektierung Gradientenbasierende Verfahren Verfahren basierend auf der zweiten Ableitung Eckpunkterkennung Harris Corner Detector
Bildverarbeitung Herbstsemester 01 Kanten und Ecken 1 Inhalt Einführung Kantendetektierung Gradientenbasierende Verfahren Verfahren basierend auf der zweiten Ableitung Eckpunkterkennung Harris Corner Detector
Michelson Interferometer: Aufbau und Anwendungen. 21. Mai 2015
 Michelson Interferometer: Aufbau und Anwendungen 1. Mai 015 1 Prinzipieller Aufbau eines Michelson Interferometers Interferenz zweier ebener elektromagnetischer Wellen gleicher Frequenz, aber unterschiedlicher
Michelson Interferometer: Aufbau und Anwendungen 1. Mai 015 1 Prinzipieller Aufbau eines Michelson Interferometers Interferenz zweier ebener elektromagnetischer Wellen gleicher Frequenz, aber unterschiedlicher
Der Einbau im Auto. Stereo: Beispiel Fahrzeug. Einbau im Rückspiegel Erfassung von. Reichweite: bis 30 m
 Der Einbau im Auto Sichtbereich Sichtbereich Kameras Einbau im Rückspiegel Erfassung von anderen Fahrzeugen (Pkw,Lkw) Zweiradfahrern Fußgängern und Kindern Reichweite: bis 30 m Digitale Bildverarbeitung
Der Einbau im Auto Sichtbereich Sichtbereich Kameras Einbau im Rückspiegel Erfassung von anderen Fahrzeugen (Pkw,Lkw) Zweiradfahrern Fußgängern und Kindern Reichweite: bis 30 m Digitale Bildverarbeitung
DPF Dynamic Partial distance Function
 DPF Dynamic Partial distance Function Vorgelegt von Sebastian Loose (MatrikelNR.: 169172), Computervisualistikstudent im 4. Semester. Hausarbeit zum Papier DPF A Perceptual Distance Function for Image
DPF Dynamic Partial distance Function Vorgelegt von Sebastian Loose (MatrikelNR.: 169172), Computervisualistikstudent im 4. Semester. Hausarbeit zum Papier DPF A Perceptual Distance Function for Image
HOW TO Heat Mapping mit EasyMap
 HOW TO Heat Mapping mit EasyMap Sie möchten analysieren, ob sich Ihre Kunden räumlich clustern? Sie sind auf der Suche nach Hot Spots, um Schwerpunktregionen herauszuarbeiten und neue Zielgebiete für Ihre
HOW TO Heat Mapping mit EasyMap Sie möchten analysieren, ob sich Ihre Kunden räumlich clustern? Sie sind auf der Suche nach Hot Spots, um Schwerpunktregionen herauszuarbeiten und neue Zielgebiete für Ihre
ECDL 2007 Modul 3 MS Word 2007
 12. Grafiken Durch das Verwenden von grafischen Objekten lassen sich Sachverhalte auflockern und plausibel darstellen. Diese Objekte sind Zeichnungen, Bilder, Fotos, Illustrationen, Diagramme oder auch
12. Grafiken Durch das Verwenden von grafischen Objekten lassen sich Sachverhalte auflockern und plausibel darstellen. Diese Objekte sind Zeichnungen, Bilder, Fotos, Illustrationen, Diagramme oder auch
Bildbearbeitung: Übersicht über ausgewählte Photoshop-Werkzeuge I
 Michael Gieding Bildbearbeitung: Übersicht über ausgewählte Photoshop-Werkzeuge I Folien zur gleichnamigen Lehrveranstaltung PH-Heidelberg, Sommersemester 2004 Die Pipette Folie 1: Ein Beispiel Übersicht
Michael Gieding Bildbearbeitung: Übersicht über ausgewählte Photoshop-Werkzeuge I Folien zur gleichnamigen Lehrveranstaltung PH-Heidelberg, Sommersemester 2004 Die Pipette Folie 1: Ein Beispiel Übersicht
Was ist das i3mainz?
 Laserscanning zur drei- dimensionalen Objekterfassung: Grundlagen und Anwendungen Andreas Marbs i3mainz - Institut für Raumbezogene Informations- und Messtechnik FH Mainz - University of Applied Sciences
Laserscanning zur drei- dimensionalen Objekterfassung: Grundlagen und Anwendungen Andreas Marbs i3mainz - Institut für Raumbezogene Informations- und Messtechnik FH Mainz - University of Applied Sciences
Praktikum Physik. Protokoll zum Versuch: Geometrische Optik. Durchgeführt am 24.11.2011
 Praktikum Physik Protokoll zum Versuch: Geometrische Optik Durchgeführt am 24.11.2011 Gruppe X Name1 und Name 2 (abc.xyz@uni-ulm.de) (abc.xyz@uni-ulm.de) Betreuerin: Wir bestätigen hiermit, dass wir das
Praktikum Physik Protokoll zum Versuch: Geometrische Optik Durchgeführt am 24.11.2011 Gruppe X Name1 und Name 2 (abc.xyz@uni-ulm.de) (abc.xyz@uni-ulm.de) Betreuerin: Wir bestätigen hiermit, dass wir das
Kamera-Sensoren. ipf opti-check 1050. Vollintegriertes Kamerasystem Konturbasiert
 ipf opti-check 1050 53 x 99,5 x 38mm Kamerasensor Arbeitsabstand min. 50mm Kurze Rüstzeiten durch bis zu 255 Prüf- programme mit bis zu 32 Prüfmerkmalen pro Kamerasensor Einfache Produktwechsel über Steuer-
ipf opti-check 1050 53 x 99,5 x 38mm Kamerasensor Arbeitsabstand min. 50mm Kurze Rüstzeiten durch bis zu 255 Prüf- programme mit bis zu 32 Prüfmerkmalen pro Kamerasensor Einfache Produktwechsel über Steuer-
Erinnerung. Arbeitsschritte der Computergraphik. Modellierung. Animation. Rendering. Ausgabemedium. Generierung
 Erinnerung Arbeitsschritte der Computergraphik Modellierung Animation Generierung Ausgabemedium Graphik/-Pipeline Wandelt die Beschreibung einer Szene im dreidimensionalen Raum in eine zweidimensionale
Erinnerung Arbeitsschritte der Computergraphik Modellierung Animation Generierung Ausgabemedium Graphik/-Pipeline Wandelt die Beschreibung einer Szene im dreidimensionalen Raum in eine zweidimensionale
Digitale Bildverarbeitung
 Digitale Bildverarbeitung Dr. Stefan Gehrig Dipl.-Physiker, Dipl.-Ing. (BA) Duale Hochschule Baden-Württemberg - Stuttgart Sommersemester 2015 S. Gehrig - Digitale Bildverarbeitung 1 S. Gehrig - Digitale
Digitale Bildverarbeitung Dr. Stefan Gehrig Dipl.-Physiker, Dipl.-Ing. (BA) Duale Hochschule Baden-Württemberg - Stuttgart Sommersemester 2015 S. Gehrig - Digitale Bildverarbeitung 1 S. Gehrig - Digitale
Tipps und Tricks zu Word. Flickflauder.ch Webdesign/Webprogramming. www.flickflauder.ch Mail: info@flickflauder.ch
 Tipps und Tricks zu Word Flickflauder.ch Webdesign/Webprogramming www.flickflauder.ch Mail: info@flickflauder.ch Textpassagen markieren 1. Markieren mit Mausklicks: Mit Maus an den Anfang klicken, dann
Tipps und Tricks zu Word Flickflauder.ch Webdesign/Webprogramming www.flickflauder.ch Mail: info@flickflauder.ch Textpassagen markieren 1. Markieren mit Mausklicks: Mit Maus an den Anfang klicken, dann
Grundlagen der industriellen Bildverarbeitung und deren Anwendungsgebiete. Christoph Walter, MSc
 Grundlagen der industriellen Bildverarbeitung und deren Anwendungsgebiete Christoph Walter, MSc Agenda Kurzvorstellung Senmicro Einleitung Komponenten in der Bildverarbeitung Grundbegriffe Ablauf eine
Grundlagen der industriellen Bildverarbeitung und deren Anwendungsgebiete Christoph Walter, MSc Agenda Kurzvorstellung Senmicro Einleitung Komponenten in der Bildverarbeitung Grundbegriffe Ablauf eine
Sehen: Die Visuelle Wahrnehmung
 Sehen: Die Visuelle Wahrnehmung 1 2 1 Aufbau der Retina Retinale Ganglien geben das Singnal weiter im Auge ( Chronobiologie!). Quelle: www.dma.ufg.ac.at 3 Anatomie des Auges: Pupille 2-8 mm (Helligkeitsanpassung);
Sehen: Die Visuelle Wahrnehmung 1 2 1 Aufbau der Retina Retinale Ganglien geben das Singnal weiter im Auge ( Chronobiologie!). Quelle: www.dma.ufg.ac.at 3 Anatomie des Auges: Pupille 2-8 mm (Helligkeitsanpassung);
Anwendung von Bildverarbeitungssystemen für sicherheitstechnische Aufgabenstellungen im industriellen Umfeld
 Anwendung von Bildverarbeitungssystemen für sicherheitstechnische Aufgabenstellungen im industriellen Umfeld & Control GmbH Pfuetschbergstraße 14 D 98527 Suhl / Germany Tel. +49 (0) 36 81/79 74-0 Fax 44
Anwendung von Bildverarbeitungssystemen für sicherheitstechnische Aufgabenstellungen im industriellen Umfeld & Control GmbH Pfuetschbergstraße 14 D 98527 Suhl / Germany Tel. +49 (0) 36 81/79 74-0 Fax 44
Digitale Bildverarbeitung (DBV)
") Digitale Bildverarbeitung (DBV) Prof. Dr. Ing. Heinz Jürgen Przybilla Labor für Photogrammetrie Email: heinz juergen.przybilla@hs bochum.de Tel. 0234 32 10517 Sprechstunde: Montags 13 14 Uhr und nach Vereinbarung
Digitale Bildverarbeitung (DBV) Prof. Dr. Ing. Heinz Jürgen Przybilla Labor für Photogrammetrie Email: heinz juergen.przybilla@hs bochum.de Tel. 0234 32 10517 Sprechstunde: Montags 13 14 Uhr und nach Vereinbarung
Geometrische Optik. Versuch: P1-40. - Vorbereitung - Inhaltsverzeichnis
 Physikalisches Anfängerpraktikum Gruppe Mo-6 Wintersemester 2005/06 Julian Merkert (229929) Versuch: P-40 Geometrische Optik - Vorbereitung - Vorbemerkung Die Wellennatur des Lichts ist bei den folgenden
Physikalisches Anfängerpraktikum Gruppe Mo-6 Wintersemester 2005/06 Julian Merkert (229929) Versuch: P-40 Geometrische Optik - Vorbereitung - Vorbemerkung Die Wellennatur des Lichts ist bei den folgenden
HDR für Einsteiger Wann brauche ist das? Anregungen aus Fotobuch und ersten eigenen Erfahrungen von Christian Sischka
 HDR für Einsteiger Wann brauche ist das? Anregungen aus Fotobuch und ersten eigenen Erfahrungen von Christian Sischka Thema Was ist HDR? Wann ist es sinnvoll es anzuwenden? Wie mache ich ein HDR? Was stelle
HDR für Einsteiger Wann brauche ist das? Anregungen aus Fotobuch und ersten eigenen Erfahrungen von Christian Sischka Thema Was ist HDR? Wann ist es sinnvoll es anzuwenden? Wie mache ich ein HDR? Was stelle
White Point Interferometrisches Messsystem für Form und Lagemessungen
 White Point Interferometrisches Messsystem für Form und Lagemessungen Ralf Kochendörfer, Robert Bosch GmbH 1 Anforderungen an die Messtechnik Kegel: -Winkel - Rundheit - Geradheit Zylinder: - Rundheit
White Point Interferometrisches Messsystem für Form und Lagemessungen Ralf Kochendörfer, Robert Bosch GmbH 1 Anforderungen an die Messtechnik Kegel: -Winkel - Rundheit - Geradheit Zylinder: - Rundheit
Autonome Fahrzeuge. Eine Pro-Seminar Arbeit von. Patrick Bertsch. 1 Abstract
 Eine Pro-Seminar Arbeit von 2006 1 Abstract Die folgende Arbeit soll einen kurzen Einblick in das Gebiet der Künstlichen Intelligenz, im Bezug auf autonome Fahrzeuge, geben. Im folgenden sollen der Aufbau
Eine Pro-Seminar Arbeit von 2006 1 Abstract Die folgende Arbeit soll einen kurzen Einblick in das Gebiet der Künstlichen Intelligenz, im Bezug auf autonome Fahrzeuge, geben. Im folgenden sollen der Aufbau
Telezentrische Meßtechnik
 Telezentrische Meßtechnik Beidseitige Telezentrie - eine Voraussetzung für hochgenaue optische Meßtechnik Autor : Dr. Rolf Wartmann, Bad Kreuznach In den letzten Jahren erlebten die Techniken der berührungslosen,
Telezentrische Meßtechnik Beidseitige Telezentrie - eine Voraussetzung für hochgenaue optische Meßtechnik Autor : Dr. Rolf Wartmann, Bad Kreuznach In den letzten Jahren erlebten die Techniken der berührungslosen,
Computer-Graphik I Transformationen & Viewing
 lausthal Motivation omputer-raphik I Transformationen & Viewing Man möchte die virtuelle 3D Welt auf einem 2D Display darstellen. Zachmann lausthal University, ermany zach@in.tu-clausthal.de. Zachmann
lausthal Motivation omputer-raphik I Transformationen & Viewing Man möchte die virtuelle 3D Welt auf einem 2D Display darstellen. Zachmann lausthal University, ermany zach@in.tu-clausthal.de. Zachmann
Digitale Bildverarbeitung Einheit 12 3D-Rekonstruktion
 Digitale Bildverarbeitung Einheit 12 3D-Rekonstruktion Lehrauftrag SS 2008 Fachbereich M+I der FH-Offenburg Dr. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Einen Eindruck davon
Digitale Bildverarbeitung Einheit 12 3D-Rekonstruktion Lehrauftrag SS 2008 Fachbereich M+I der FH-Offenburg Dr. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Einen Eindruck davon
Flexoskope. Endoskope mit höchster Flexibilität
 Flexoskope Endoskope mit höchster Flexibilität Das Flexoskop Flexoskope sind, wie ihr Name bereits verrät, extrem flexibel. Sie sind einfach zu handhaben und ermöglichen den Zugang in gewundene und verwinkelte
Flexoskope Endoskope mit höchster Flexibilität Das Flexoskop Flexoskope sind, wie ihr Name bereits verrät, extrem flexibel. Sie sind einfach zu handhaben und ermöglichen den Zugang in gewundene und verwinkelte
Fahrzeuglokalisierung anhand visueller Landmarken und einer digitalen Karte
 Fahrzeuglokalisierung anhand visueller Landmarken und einer digitalen Karte Oliver Pink INSTITUT FÜR MESS- UND REGELUNGSTECHNIK KIT - Universität des Landes Baden-Württemberg und nationales Großforschungszentrum
Fahrzeuglokalisierung anhand visueller Landmarken und einer digitalen Karte Oliver Pink INSTITUT FÜR MESS- UND REGELUNGSTECHNIK KIT - Universität des Landes Baden-Württemberg und nationales Großforschungszentrum
Unity 4 Teil II. Universität zu Köln Softwaretechnologie II (Teil 1): Simulation und 3D Programmierung Dozent: Manfred Thaller Marvin Busch
: Simulation und 3D Programmierung Dozent: Manfred Thaller Marvin Busch") Unity 4 Teil II Universität zu Köln Softwaretechnologie II (Teil 1): Simulation und 3D Programmierung Dozent: Manfred Thaller Marvin Busch Inhalt Wie erstelle ich ein Projekt mit Unity? Toolbar Navigation
Unity 4 Teil II Universität zu Köln Softwaretechnologie II (Teil 1): Simulation und 3D Programmierung Dozent: Manfred Thaller Marvin Busch Inhalt Wie erstelle ich ein Projekt mit Unity? Toolbar Navigation
Systems für den HDS 4500
 Entwicklung eines remote-monitoring monitoring Systems für den HDS 4500 Jens-André Paffenholz, Ingo Neumann und Hansjörg Kutterer Geodätisches Institut Leibniz Universität Hannover Session: Laserscanning
Entwicklung eines remote-monitoring monitoring Systems für den HDS 4500 Jens-André Paffenholz, Ingo Neumann und Hansjörg Kutterer Geodätisches Institut Leibniz Universität Hannover Session: Laserscanning
Spektroskopie. im IR- und UV/VIS-Bereich. Optische Rotationsdispersion (ORD) und Circulardichroismus (CD) http://www.analytik.ethz.
 und Circulardichroismus (CD) http://www.analytik.ethz.") Spektroskopie im IR- und UV/VIS-Bereich Optische Rotationsdispersion (ORD) und Circulardichroismus (CD) Dr. Thomas Schmid HCI D323 schmid@org.chem.ethz.ch http://www.analytik.ethz.ch Enantiomere sind Stereoisomere,
Spektroskopie im IR- und UV/VIS-Bereich Optische Rotationsdispersion (ORD) und Circulardichroismus (CD) Dr. Thomas Schmid HCI D323 schmid@org.chem.ethz.ch http://www.analytik.ethz.ch Enantiomere sind Stereoisomere,
Wie kann ich Azure mit meiner lokalen IT koppeln?
 Wie kann ich Azure mit meiner lokalen IT koppeln? Hybrid-Anwendungen Maximale Kontrolle über die Umgebung Individualisierbarkeit Investitionskosten für eine begrenzte Infrastruktur Hybrid-Anwendungen Maximale
Wie kann ich Azure mit meiner lokalen IT koppeln? Hybrid-Anwendungen Maximale Kontrolle über die Umgebung Individualisierbarkeit Investitionskosten für eine begrenzte Infrastruktur Hybrid-Anwendungen Maximale
Praktikum ios-entwicklung im Sommersemester 2015 Übungsblatt 3
 Ludwig-Maximilians-Universität München Institut für Informatik Lehrstuhl für Mobile und Verteilte Systeme Prof. Dr. Claudia Linnhoff-Popien Praktikum ios-entwicklung im Sommersemester 2015 Übungsblatt
Ludwig-Maximilians-Universität München Institut für Informatik Lehrstuhl für Mobile und Verteilte Systeme Prof. Dr. Claudia Linnhoff-Popien Praktikum ios-entwicklung im Sommersemester 2015 Übungsblatt
Verhaltensbasierte Robotik I
 Verhaltensbasierte Robotik I Rückblick Navigation bei Mensch und Tier Seefahrt Feld-/Beobachterperspektive Referenzsysteme Thomas Röfer Ameisennavigation Bienennavigation Vogelnavigation Kognitive Robotik
Verhaltensbasierte Robotik I Rückblick Navigation bei Mensch und Tier Seefahrt Feld-/Beobachterperspektive Referenzsysteme Thomas Röfer Ameisennavigation Bienennavigation Vogelnavigation Kognitive Robotik
FLC200 BL - Hintergrund
 FLC200 BL - Hintergrund WE-EF s Philosophie in puncto Umweltschutz ist ganz einfach: Wir entwerfen und produzieren innovative langlebige Leuchten und schließen damit auf lange Zeit aus, dass sie ersetzt
FLC200 BL - Hintergrund WE-EF s Philosophie in puncto Umweltschutz ist ganz einfach: Wir entwerfen und produzieren innovative langlebige Leuchten und schließen damit auf lange Zeit aus, dass sie ersetzt
STURMSICHERUNGEN SCHIENENZANGEN BREMSLÜFTER INDUSTRIEBREMSEN HYDRO-ZYLINDER HYDRAULIK-PUFFER KRAN-LAUFRÄDER KUPPLUNGEN SEILROLLEN.
 Scheibenbremsen STURMSICHERUNGEN SCHIENENZANGEN BREMSLÜFTER INDUSTRIEBREMSEN HYDRO-ZYLINDER HYDRAULIK-PUFFER KRAN-LAUFRÄDER KUPPLUNGEN SEILROLLEN Funktionsprinzip: } mit Federkraft bremsend } mit Bremslüftgerät
Scheibenbremsen STURMSICHERUNGEN SCHIENENZANGEN BREMSLÜFTER INDUSTRIEBREMSEN HYDRO-ZYLINDER HYDRAULIK-PUFFER KRAN-LAUFRÄDER KUPPLUNGEN SEILROLLEN Funktionsprinzip: } mit Federkraft bremsend } mit Bremslüftgerät
Versuchsanleitung. Labor Mechatronik. Versuch BV_3 Grundlagen der Bildverarbeitung. Labor Mechatronik Versuch BV-3 Grundlagen der Bildverarbeitung
 Fachbereich 2 Ingenieurwissenschaften II Labor Mechatronik Steuerungund Regelung Lehrgebiet: Mechatronik Versuchsanleitung Versuch BV_3 Grundlagen der Bildverarbeitung Foto: Firmenschrift Fa. Rauscher
Fachbereich 2 Ingenieurwissenschaften II Labor Mechatronik Steuerungund Regelung Lehrgebiet: Mechatronik Versuchsanleitung Versuch BV_3 Grundlagen der Bildverarbeitung Foto: Firmenschrift Fa. Rauscher
Kamerabasierte Navigation im Inneren von Gebäuden Sebastian Hilsenbeck, Robert Huitl, Georg Schroth, Eckehard Steinbach
 Technische Universität München Kamerabasierte Navigation im Inneren von Gebäuden Sebastian Hilsenbeck, Robert Huitl, Georg Schroth, Eckehard Steinbach Outdoor vs. Indoor Im Freien In Gebäuden No GPS reception
Technische Universität München Kamerabasierte Navigation im Inneren von Gebäuden Sebastian Hilsenbeck, Robert Huitl, Georg Schroth, Eckehard Steinbach Outdoor vs. Indoor Im Freien In Gebäuden No GPS reception
Phishingerkennung mittels visuellem Ähnlichkeitsvergleich. Felix Hill Ruhr-Universität Bochum felix.hill@rub.de
 Phishingerkennung mittels visuellem Ähnlichkeitsvergleich Felix Hill Ruhr-Universität Bochum felix.hill@rub.de 1 ÜBERSICHT Entwicklung im Bereich Phishing Ansatz Bilderkennung Evaluation G DATA EINFACH
Phishingerkennung mittels visuellem Ähnlichkeitsvergleich Felix Hill Ruhr-Universität Bochum felix.hill@rub.de 1 ÜBERSICHT Entwicklung im Bereich Phishing Ansatz Bilderkennung Evaluation G DATA EINFACH
Corporate Design 2012
 Corporate Design 2012 VLW Corporate Design 2012 1 Die Bedeutung des Logos Das Logo greift im Bildelement sportiv und dynamisch ein typisches Spielelement des Volleyballs auf: das Baggern. Es ist formal
Corporate Design 2012 VLW Corporate Design 2012 1 Die Bedeutung des Logos Das Logo greift im Bildelement sportiv und dynamisch ein typisches Spielelement des Volleyballs auf: das Baggern. Es ist formal
Text-Bild-Link-Editor
 Reihe TextGrid-Tutorials Text-Bild-Link-Editor Arbeiten mit Verknüpfungen Mit dem Text-Bild-Link-Editor können Textsegmente mit Bildausschnitten verknüpft werden. Eine typische Anwendung ist die Verknüpfung
Reihe TextGrid-Tutorials Text-Bild-Link-Editor Arbeiten mit Verknüpfungen Mit dem Text-Bild-Link-Editor können Textsegmente mit Bildausschnitten verknüpft werden. Eine typische Anwendung ist die Verknüpfung
www.uni-erfurt.de/target/ringvorlesungen
 www.uni-erfurt.de/target/ringvorlesungen Digitale Spiele als Ab-Bild der realen Welt Die Sicht eines Computergraphikers Paul Grimm Computer Graphics Applied Computer Science Erfurt University of Applied
www.uni-erfurt.de/target/ringvorlesungen Digitale Spiele als Ab-Bild der realen Welt Die Sicht eines Computergraphikers Paul Grimm Computer Graphics Applied Computer Science Erfurt University of Applied
Gemeinsames Agieren für noch mehr Erfolg im Markt. Neue Entwicklungen bei Fahrerlosen Transportsystemen (FTS)
") 2. Fraunhofer IPA Technologieforum Stuttgart, am 25. April 2007 Gemeinsames Agieren für noch mehr Erfolg im Markt Neue Entwicklungen bei Fahrerlosen Transportsystemen (FTS) 1. Einleitung 2. FTS-Realismus
2. Fraunhofer IPA Technologieforum Stuttgart, am 25. April 2007 Gemeinsames Agieren für noch mehr Erfolg im Markt Neue Entwicklungen bei Fahrerlosen Transportsystemen (FTS) 1. Einleitung 2. FTS-Realismus
Wo bin ich? ibeacons im Einsatz in der Bibliothek der TH Wildau!
 Wo bin ich? ibeacons im Einsatz in der Bibliothek der TH Wildau! Fabian Götz u. Jonas Wolff TH Wildau - Studiengang Telematik Arbeitsgruppe: icampus Wildau Projektleiterin Prof. Dr. Janett Mohnke Wo bin
Wo bin ich? ibeacons im Einsatz in der Bibliothek der TH Wildau! Fabian Götz u. Jonas Wolff TH Wildau - Studiengang Telematik Arbeitsgruppe: icampus Wildau Projektleiterin Prof. Dr. Janett Mohnke Wo bin
Robuste Hashes zur forensischen Bilderkennung
 Robuste Hashes zur forensischen Bilderkennung Dr. Martin Steinebach Information Assurance (IAS) Fraunhofer SIT Rheinstrasse 75, 64295 Darmstadt Telefon: 06151 869-349, Fax: 06151 869-224 E-mail: martin.steinebach@sit.fraunhofer.de
Robuste Hashes zur forensischen Bilderkennung Dr. Martin Steinebach Information Assurance (IAS) Fraunhofer SIT Rheinstrasse 75, 64295 Darmstadt Telefon: 06151 869-349, Fax: 06151 869-224 E-mail: martin.steinebach@sit.fraunhofer.de
Software in der Industriellen Bildverarbeitung
 Software in der Industriellen Bildverarbeitung Technologieentwicklung am Beispiel Pattern Matching Dr. Olaf Munkelt MVTec Software GmbH MVTec Software GmbH Firma konzentriert sich auf Building Vision for
Software in der Industriellen Bildverarbeitung Technologieentwicklung am Beispiel Pattern Matching Dr. Olaf Munkelt MVTec Software GmbH MVTec Software GmbH Firma konzentriert sich auf Building Vision for
Virtuelle Fotografie (CGI)
") (CGI) Vorteile und Beispiele Das ist (k)ein Foto. Diese Abbildung ist nicht mit einer Kamera erstellt worden. Was Sie sehen basiert auf CAD-Daten unserer Kunden. Wir erzeugen damit Bilder ausschließlich
(CGI) Vorteile und Beispiele Das ist (k)ein Foto. Diese Abbildung ist nicht mit einer Kamera erstellt worden. Was Sie sehen basiert auf CAD-Daten unserer Kunden. Wir erzeugen damit Bilder ausschließlich
3D Landschaftsvisualisierung
 3D Landschaftsvisualisierung Rüdiger Westermann und Christian Dick Lehrstuhl für Computer Graphik und Visualisierung Fakultät für Informatik 3D Landschaftsvisualisierung - Herausforderungen Die computergestützte
3D Landschaftsvisualisierung Rüdiger Westermann und Christian Dick Lehrstuhl für Computer Graphik und Visualisierung Fakultät für Informatik 3D Landschaftsvisualisierung - Herausforderungen Die computergestützte
Technische Gesichtserkennung
 Technische Gesichtserkennung Gliederung Was ist Gesichtserkennung? Anwendungsbereiche der Gesichtserkennung Technische Verfahren Paul-Viola Algorithmus Gesichtsverfolgung via Webcam Hardware Software Demo
Technische Gesichtserkennung Gliederung Was ist Gesichtserkennung? Anwendungsbereiche der Gesichtserkennung Technische Verfahren Paul-Viola Algorithmus Gesichtsverfolgung via Webcam Hardware Software Demo
Vorbereitungsaufgaben
 Praktikum Bildverarbeitung / Bildinformationstechnik Versuch BV 4 / BIT 3: Mustererkennung Paddy Gadegast, CV00, 160967 Alexander Opel, CV00, 16075 Gruppe 3 Otto-von-Guericke Universität Magdeburg Fakultät
Praktikum Bildverarbeitung / Bildinformationstechnik Versuch BV 4 / BIT 3: Mustererkennung Paddy Gadegast, CV00, 160967 Alexander Opel, CV00, 16075 Gruppe 3 Otto-von-Guericke Universität Magdeburg Fakultät
Procul ex oculis, procul ex mente.
 Was kann Eyetracking bewirken? Dr. Thies Pfeiffer Geschäftsleiter Mediablix IIT GmbH Unsere Augen Augenbewegungen Timing Verlauf Procul ex oculis, procul ex mente. Fern den Augen, fern dem Sinn. Beispiel
Was kann Eyetracking bewirken? Dr. Thies Pfeiffer Geschäftsleiter Mediablix IIT GmbH Unsere Augen Augenbewegungen Timing Verlauf Procul ex oculis, procul ex mente. Fern den Augen, fern dem Sinn. Beispiel
Kurzbeschreibung. Kartendienste im neuen GeoServer. MapSolution
 Kurzbeschreibung Kartendienste im neuen GeoServer MapSolution Der Landrat Geoinformationen und Liegenschaftskataster - - Steinstraße 27 59872 Meschede Tel.: 02961/94 3312 Fax: 0291/9426320 mail: gis@hochsauerlandkreis.de
Kurzbeschreibung Kartendienste im neuen GeoServer MapSolution Der Landrat Geoinformationen und Liegenschaftskataster - - Steinstraße 27 59872 Meschede Tel.: 02961/94 3312 Fax: 0291/9426320 mail: gis@hochsauerlandkreis.de
KiRo - Tischfußball gegen den Roboter
 KiRo - Tischfußball gegen den Roboter Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz - KiRo - Tischfußball gegen den Roboter Referat am 17.07.2006 von Thomas Schnattinger Proseminar
KiRo - Tischfußball gegen den Roboter Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz - KiRo - Tischfußball gegen den Roboter Referat am 17.07.2006 von Thomas Schnattinger Proseminar
Sensoren in Apple Geräten. Minh Khoi Nguyen! Tobias Schaarschmidt! SG: MD13w1
 Sensoren in Apple Geräten Minh Khoi Nguyen Tobias Schaarschmidt SG: MD13w1 Inhalt 1. Allgemein zu iphone & ipad 2. Generationen 3. Sensoren 3.1. Arten 3.2. Funktion 1. Allgemein zu iphone - Erscheinungsjahr:
Sensoren in Apple Geräten Minh Khoi Nguyen Tobias Schaarschmidt SG: MD13w1 Inhalt 1. Allgemein zu iphone & ipad 2. Generationen 3. Sensoren 3.1. Arten 3.2. Funktion 1. Allgemein zu iphone - Erscheinungsjahr:
PO Doppelbrechung und elliptisch polarisiertes Licht
 PO Doppelbrechung und elliptisch polarisiertes Licht Blockpraktikum Herbst 27 (Gruppe 2b) 24. Oktober 27 Inhaltsverzeichnis 1 Grundlagen 2 1.1 Polarisation.................................. 2 1.2 Brechung...................................
PO Doppelbrechung und elliptisch polarisiertes Licht Blockpraktikum Herbst 27 (Gruppe 2b) 24. Oktober 27 Inhaltsverzeichnis 1 Grundlagen 2 1.1 Polarisation.................................. 2 1.2 Brechung...................................
Bildverarbeitung/Mustererkennung: Zusammenfassung und Ausblick
 Bildverarbeitung/Mustererkennung: Zusammenfassung und Ausblick D. Schlesinger TUD/INF/KI/IS D. Schlesinger () BV/ME: Zusammenfassung 1 / 6 Organisatorisches Es gibt keine Scheine und keine bestanden Abschlüsse
Bildverarbeitung/Mustererkennung: Zusammenfassung und Ausblick D. Schlesinger TUD/INF/KI/IS D. Schlesinger () BV/ME: Zusammenfassung 1 / 6 Organisatorisches Es gibt keine Scheine und keine bestanden Abschlüsse
