Computergraphik 1 ( )
|
|
|
- Carsten Mann
- vor 5 Jahren
- Abrufe
Transkript
1 2008 Computergraphik 1 ( ) Ausarbeitung für die schriftliche Prüfung Die Computergraphik stellt eine abwechslungsreiche und lohnende Schwerpunktbildung im Masterstudium Computergraphik & Digitale Bildverarbeitung dar. Nähere Informationen gibt es bei der Fakultät Informatik. Martin Tintel
2 Die Jahreszahl (200X) war auf dem Scan von der Fachschaft nicht 100%ig leserlich. Vermute aber, dass es hinten ( X ) eine 1 ist, also Aufgabe 1 z Puffer Gegeben sind vier Rechtecke und ein Dreieck: R1 mit den Eckpunkten (1, 1, 2), (5, 1, 2), (5, 7, -10) und (1, 7, -10) R2 mit den Eckpunkten (1, 1, 4), (10, 1, 4), (10, 5, -4) und (1, 5, -4) R3 mit den Eckpunkten (7, 1, 6), (9, 1, 6), (9, 8, -15) und (7, 8, -15) D1 mit den Eckpunkten (1, 1, -8), (8, 1, -8) und (1, 8, -8) Diese Polygone sollen mittels eines auf einem z Puffer basierendem Algorithmus in der obigen Reihenfolge dargestellt werden. Als Bildebene wird die xy Ebene angenommen, die Blickrichtung ist von der positiven z Achse in Richtung Ursprung, und es wird eine Parallelprojektion vorgenommen (d.h. es gibt keine perspektivische Verkürzung o.ä.). Es soll ein Rasterbild der Größe 12 x 8 erzeugt werden, bei dem die Sichtbarkeit innerhalb eines Pixels durch die Sichtbarkeit im Pixelmittelpunkt festgelegt wird. Tragen Sie die Ergebnisse des Verfahrens in die auf der nächsten Seite gegebenen Bereiche für das Bild und z- Puffer ein. Hier (Bild) sollen sie - z.b. durch Angabe des richtigen Kürzels wie R1 oder D1, oder durch farbiges ausfüllen -angeben, welches der Polygone in jedem Pixel zu sehen ist. Hier (z- Puffer) sollen Sie den letztgültigen z-wert für jedes belegte Pixel eintragen. Falls Sie sich bei diesem Beispiel verschreiben sollten, dann können Sie von den Prüfungsaufsehern noch einen Ausdruck der beiden Raster erhalten. Seite 2 von 44
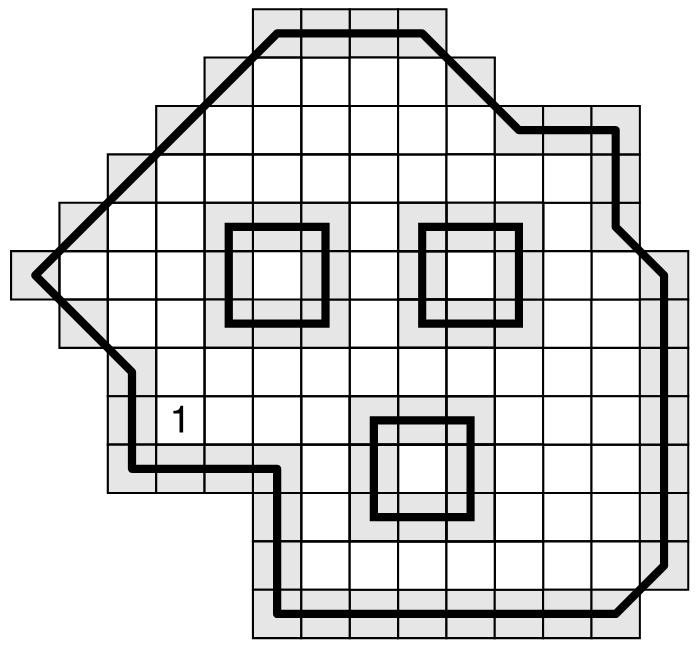
3 Aufgabe2 Constructive Solid Geometry Gegeben ist die im linken Raster aufgezeichnete schwarze Fläche: Seite 3 von 44
4 Skizzieren Sie einen 2D CSG Baum, der die oben angegebene schwarze Fläche mit möglichst wenig Endknoten repräsentiert. Als Endknoten (geometrisches Grundobjekte) sind dabei ausschließlich die drei neben dem Raster angegebenen schwarzen Figuren zu verwenden, die nicht rotiert oder skaliert, sondern ausschließlich verschoben und durch die drei CSG-Operationen (Vereinigung, Durchschnitt und Subtraktion) verbunden werden dürfen. Der Raster rund um die Grundbausteine gehört nicht zu den Bausteinen selbst, sondern dient nur dazu ihre Größe (3 mal 3 mit Loch in der Mitte etc.) deutlich zu zeigen. Geben Sie im CSG-Baum die Platzierung der Endbausteine in Pixelkoodinaten in Bezug auf die linke untere Ecke des Bausteins an. (0,0) würde beispielsweise einen Baustein in der linken unteren Ecke des Rasters angeben, (13,7) einen Baustein A in der rechten oberen Ecke, und (13,9) einen Baustein C in der rechten oberen Ecke. Beachten Sie bitte auch dass es mehrere relativ gute en gibt und Sie nicht unbedingt die effizienteste Version angeben müssen um alle Punkte zu bekommen. Sie müssen auch nicht unbedingt alle Bausteinsorten verwenden Aufgabe 1 z Puffer Gegeben sind vier Rechtecke und ein Dreieck: R1 mit den Eckpunkten (1, 1, 8), (7, 1, 8), (12, 6, -2) und (6, 6, -2) R2 mit den Eckpunkten (3, 2, 3), (7, 2, 3), (7, 6, 3) und (3, 6, 3) R3 mit den Eckpunkten (7, 2, 3), (9, 4, -1), (9, 8, -1) und (7, 6, 3) R4 mit den Eckpunkten (7, 6, 3), (9, 8, -1), (5, 8, -1) und (3, 6, 3) Seite 4 von 44
5 D1 mit den Eckpunkten (1, 1, 8), (6, 6, -2) und (1, 6, -2) Diese Polygone sollen mittels eines auf einem z Puffer basierendem Algorithmus in der obigen Reihenfolge dargestellt werden. Als Bildebene wird die xy Ebene angenommen, die Blickrichtung ist von der positiven z Achse in Richtung Ursprung, und es wird eine Parallelprojektion vorgenommen (d.h. es gibt keine perspektivische Verkürzung o.ä.). Es soll ein Rasterbild der Größe 12 x 8 erzeugt werden, bei dem die Sichtbarkeit innerhalb eines Pixels durch die Sichtbarkeit im Pixelmittelpunkt festgelegt wird. Tragen Sie die Ergebnisse des Verfahrens in die auf der nächsten Seite gegebenen Bereiche für das Bild und z- Puffer ein. Hier (Bild) sollen sie - z.b. durch Angabe des richtigen Kürzels wie R1 oder D1, oder durch farbiges ausfüllen -angeben, welches der Polygone in jedem Pixel zu sehen ist. Hier (z- Puffer) sollen Sie den letztgültigen z-wert für jedes belegte Pixel eintragen. Falls Sie sich bei diesem Beispiel verschreiben sollten, dann können Sie von den Prüfungsaufsehern noch einen Ausdruck der beiden Raster erhalten. Aufgabe 2 Transformationsmatrizen Ein Objekt, das sich bereits in einer durch zwei Drehungen Ф und Ѳ (Ф dreht um die z-achse, und Ѳ um die y-achse; für eine beliebige Drehung im Raum sind bekanntlich nur zwei Drehwinkel erforderlich.) und eine Verschiebung (tx, ty, tz) bestimmten Lage im Raum befindet (siehe Skizze), soll in Bezug auf die x -Achse seiner Objektkoordinaten (Das lokale Koordinatensystem des Objektes, das in der Skizze als x, y und z bezeichnet wird, und das gegenüber den Weltkoordinaten um die erwähnten Winkel Ф und Ѳ verdreht ist) um (1,1) geschert werden, und dann auf die doppelte Größe gebracht werden. Geben Sie die Abfolge und den Inhalt der Transformationsmatrizen für Weltkoordinaten (Das globale Koordinatensystem, welches in der Skizze durch die Hauptachsen x, y und z gegeben ist.) an, die dazu nötig sind; es ist nicht erforderlich, dass Sie die Kette der Transformationen auch ausmultiplizieren. Seite 5 von 44
6 Aufgabe 3 Ausgabe von Linien Gegeben sind zwei Linien, die durch die Endpunkte (2, 1) und (6, 8) sowie (7, 1) und (11, 8) definiert sind beide haben dieselbe Steigung. Geben Sie die erste dieser Linien mit dem Bresenham Verfahren im untenstehenden Raster aus, und verwenden Sie für die zweite Linie das DDA- Verfahren. Geben Sie alle Zwischenschritte der beiden Algorithmen (gegebenenfalls auf einem Beiblatt) an Aufgabe 1 Transformationsmatrizen Seite 6 von 44
7 Beschreiben Sie die Transformationen, die eine Spiegelung an einer allgemeinen Ebene im Dreidimensionalen bewirken; die Ebene verläuft durch den Punkt P = (4, 2, 4) und hat den Normalvektor N = (2, 2, 1). Geben Sie die homogenen Transformationsmatrizen der einzelnen Teilschritte in der richtigen Reihenfolge an. Geben Sie auch noch an, wo in der Kette der Transformationen eine zusätzlich erfolgende gleichförmige Skalierung des Objektes um den Faktor 2 einzufügen ist, und wie die zugehörige Matrix aussieht. Aufgabe 2 Pixel Shading Führen Sie die Phong-Schattierung des mit * gekennzeichneten Pixels im untenstehenden bereits in Pixelrasterung gegebenen Dreieck durch. Die Normalvektoren an den Eckpunkten sind bekannt und aus der Skizze ersichtlich. Die Richtung des einfallenden Lichtes ist durch den Vektor (0, 0, 1) gegeben. Die Intensität der Lichtquelle ist 0.6 und die Materialkonstante beträgt 0.9. Als Schattierungsmodell soll die Lambert sche Regel verwendet werden. Aufgabe 3 Ausgabe von Linien Gegeben sind zwei Linien, die durch die Endpunkte (1, 8) und (12, 4) sowie (1, 6) und (11, 1) definiert sind. Geben Sie die erste dieser Linien mit dem Bresenham Verfahren im untenstehenden Raster aus, und verwenden Sie für die zweite Linie das DDA-Verfahren. Geben Sie alle Zwischenschritte der beiden Algorithmen (gegebenenfalls auf einem Beiblatt) an. Seite 7 von 44
8 Aufgabe 1 Transformationsmatrizen Bestimmen Sie die Koeffizienten der homogenen Matrix, die folgendes im Zweidimensionalen bewirkt: Scherung entlang der Geraden g um den Faktor 3, wobei g durch die Punkte (2, 1) und (5, 3) verläuft. Anschließend soll noch eine Spiegelung an der Geraden g durchgeführt werden. Verifizieren Sie das Ergebnis mit dem Punkt (1, 2.5). Hinweis: eine Scherung um den Faktor entlang der -Achse hat die folgende homogene Transformationsmatrix: Aufgabe 2 Schattierung von Polygonen Führen Sie die Phong Schattierung des mit * gekennzeichneten Pixels für das unten bereits in Pixelrastung angegebene Polygon durch. Die Normalvektoren an den Eckpunkten sind bekannt und aus der Skizze ersichtlich. Die Richtung zur Lichtquelle ist durch den Vektor (0, 0, 1) gegeben. Die Intensität der Lichtquelle ist 0.7 und die Materialkonstante beträgt 0.2. Als Schattierungsmodell soll die Lambertsche Regel verwendet werden. Seite 8 von 44
 gegeben.")
9 Berechnen Sie die Phong Schattierung desselben Pixels nun auch unter zusätzlicher Einbeziehung eines Glanzlichtes (specular reflection). Nehmen Sie mit 0.3 und mit 4 an; die Blickrichtung sei durch (0, 0, 1) gegeben. Aufgabe 3 z Puffer Gegeben sind vier Rechtecke und ein Dreieck: R1 mit den Eckpunkten (1, 1, 10), (5, 1, 10), (5, 7, -2) und (1, 7, -2) R2 mit den Eckpunkten (1, 1, 5), (10, 1, 5), (10, 5, 5) und (1, 5, 5) R3 mit den Eckpunkten (7, 1, 2), (9, 1, 2), (9, 8, 9) und (7, 8, 9) D1 mit den Eckpunkten (4, 1, 10), (11, 1, 10) und (11, 8, 10) Diese Polygone sollen mittels eines auf einem z Puffer basierendem Algorithmus in der obigen Reihenfolge dargestellt werden. Als Bildebene wird die xy Ebene angenommen, die Blickrichtung ist von der positiven z Achse in Richtung Ursprung, und es wird eine Parallelprojektion vorgenommen (d.h. es gibt keine perspektivische Verkürzung o.ä.). Es soll ein Rasterbild der Größe 12 x 8 erzeugt werden, bei dem die Sichtbarkeit innerhalb eines Pixels durch die Sichtbarkeit im Pixelmittelpunkt festgelegt wird. Tragen Sie die Ergebnisse des Verfahrens in die auf der nächsten Seite gegebenen Bereiche für das Bild und z- Puffer ein. Hier (Bild) sollen sie - z.b. durch Angabe des richtigen Kürzels wie R1 oder D1, oder durch farbiges ausfüllen -angeben, welches der Polygone in jedem Pixel zu sehen ist. Hier (z- Puffer) sollen Sie den letztgültigen z-wert für jedes belegte Pixel eintragen. Seite 9 von 44
10 Aufgabe 1 Transformationsmatrizen Bestimmen Sie die Koeffizienten der homogenen Matrix, die folgendes im Zweidimensionalen bewirkt: Scherung entlang der Geraden g um den Faktor 2, wobei g durch die Punkte (7, 2) und (10, 6) verläuft. Anschließend soll noch eine Spiegelung an der Geraden g durchgeführt werden. Verifizieren Sie das Ergebnis mit dem Punkt (25, 1). Hinweis: eine Scherung um den Faktor entlang der -Achse hat die folgende homogene Transformationsmatrix: Aufgabe 2 Boundary Fill Füllen Sie das angegebene Polygon vom mit 1 markierten Pixel ausgehend nach dem modifizierten flood fill- Algorithmus, der auf horizontale Pixelreihen (pixel spans) abgestimmt ist. Schreiben Sie die weitere Reihenfolge (die laufende Nummer), in der die Pixel gefüllt werden, in die vorgesehenen weißen Kästchen. Seite 10 von 44

11 Seite 11 von 44
. b.")
12 Aufgabe 3 Quadtree und CSG Gegeben ist folgende schwarze Fläche (der Raster gehört nicht dazu): a. Zeichnen Sie einen Quadtree, der diese schwarze Fläche repräsentiert. Geben Sie dabei klar an, welche Anordnung die Unterknoten im Quadtree haben (z.b oder ). b. Skizzieren Sie einen 2D CSG Baum, der die oben angegebene schwarze Fläche mit möglichst wenig Endknoten repräsentiert. Endknoten (Primitive) sind dabei Quadrate (Rechtecke mit gleich langen Seiten),die durch ihre linke untere und obere rechte Ecke im Raster angegeben werden (z.b. ((1, 1), (2, 2) für das Quadrat ganz unten links.) Aufgabe 1 z Puffer Gegeben sind vier Rechtecke und ein Dreieck: R1 mit den Eckpunkten (2, 1, 4), (9, 1, 4), (9, 4, 1) und (2, 4, 1) R2 mit den Eckpunkten (2, 8, 4), (9, 8, 4), (9, 5, 1) und (2, 5, 1) R3 mit den Eckpunkten (2, 1, 4), (5, 1, 1), (5, 8, 1) und (2, 8, 4) R4 mit den Eckpunkten (9, 1, 4), (6, 1, 1), (6, 8, 1) und (9, 8, 4) Diese Polygone sollen mittels eines auf einem z Puffer basierendem Algorithmus in der obigen Reihenfolge dargestellt werden. Als Bildebene wird die xy Ebene angenommen, die Blickrichtung ist von der positiven z Achse in Richtung Ursprung, und es wird eine Parallelprojektion vorgenommen (d.h. es gibt keine perspektivische Verkürzung o.ä.). Es soll ein Rasterbild der Größe 12 x 8 erzeugt werden, bei dem die Sichtbarkeit innerhalb eines Pixels durch die Sichtbarkeit im Pixelmittelpunkt festgelegt wird. Tragen Sie die Ergebnisse des Verfahrens in die auf der nächsten Seite gegebenen Bereiche für das Bild und z- Puffer ein. Hier (Bild) sollen sie - z.b. durch Angabe des richtigen Kürzels wie R1 oder R4, oder durch farbiges ausfüllen -angeben, welches der Polygone in jedem Pixel zu sehen ist. Hier (z- Puffer) sollen Sie den letztgültigen z-wert für jedes belegte Pixel eintragen. Seite 12 von 44
13 Falls Sie sich bei diesem Beispiel verschreiben sollten, dann können Sie von den Prüfungsaufsehern noch einen Ausdruck der beiden Raster erhalten. Aufgabe 2 Transformationsmatrizen (kam genauso auch am ) Ein Objekt, das sich bereits in einer durch zwei Drehungen Ф und Ѳ (Ф dreht um die z-achse, und Ѳ um die y-achse; für eine beliebige Drehung im Raum sind bekanntlich nur zwei Drehwinkel erforderlich.) und eine Verschiebung (tx, ty, tz) bestimmten Lage im Raum befindet (siehe Skizze), soll in Bezug auf die x -Achse seiner Objektkoordinaten (Das lokale Koordinatensystem des Objektes, das in der Skizze als x, y und z bezeichnet wird, und das gegenüber den Weltkoordinaten um die erwähnten Winkel Ф und Ѳ verdreht ist) um (1,1) geschert werden, und dann auf die doppelte Größe gebracht werden. Geben Sie die Abfolge und den Inhalt der Transformationsmatrizen für Weltkoordinaten (Das globale Koordinatensystem, welches in der Skizze durch die Hauptachsen x, y und z gegeben ist.) an, die dazu nötig sind; es ist nicht erforderlich, dass Sie die Kette der Transformationen auch ausmultiplizieren. Seite 13 von 44
14 Aufgabe 3 Ausgabe von Linien Gegeben sind zwei Linien, die durch die Endpunkte (1, 2) und (12, 4) sowie (1, 8) und (11, 6) definiert sind. Geben Sie die erste dieser Linien mit dem Bresenham Verfahren im untenstehenden Raster aus, und verwenden Sie für die zweite Linie das DDA-Verfahren. Geben Sie alle Zwischenschritte der beiden Algorithmen (gegebenenfalls auf einem Beiblatt) an Aufgabe 1 Transformationsmatrizen Bestimmen Sie die Koeffizienten der homogenen Matrix, die im Dreidimensionalen die Spiegelung an einer Geraden g durchgeführt, anschließend das gespiegelte Objekt um einen Vektor v in der x, z- Ebene schert und dann noch in x- Richtung um den Faktor 2 skaliert. Die Gerade g ist durch die Punkte p1 und p2 mit den Koordinaten (1, 8, 6) und (4, 6, 1) gegeben. Der Schervektor v ist (1, 1). Geben Sie unbedingt auch die Begründung, daher die Beschreibung des Rechenganges, an. Aufgabe 2 Schattierung von Polygonen (ACHTUNG: Gouraud Schattierung, nicht Phong!) a. Führen Sie die Gouraud Schattierung des mit * gekennzeichneten Pixels für das unten bereits in Pixelrastung angegebene Polygon durch. Die Normalvektoren an den Eckpunkten sind bekannt und aus der Skizze ersichtlich. Die Richtung zur Lichtquelle ist durch den Vektor Seite 14 von 44
 und (12, 5) sowie (1, 8) und (6, 6) definiert sind.")
15 (0, 0, 1) gegeben. Die Intensität der Lichtquelle ist 1.0 und die Materialkonstante beträgt 0.5. Als Schattierungsmodell soll die Lambert sche Regel verwendet werden. b. Berechnen Sie die Phong Schattierung desselben Pixels. Nehmen Sie mit 0.5 und mit 0.5 und den Exponenten mit 5 an. Aufgabe 3 Ausgabe von Linien Gegeben sind zwei Linien, die durch die Endpunkte (1, 1) und (12, 5) sowie (1, 8) und (6, 6) definiert sind. Geben Sie die erste dieser Linien mit dem Bresenham Verfahren im untenstehenden Raster aus, und verwenden Sie für die zweite Linie das DDA-Verfahren. Geben Sie alle Zwischenschritte der beiden Algorithmen (gegebenenfalls auf einem Beiblatt) an Aufgabe 1 z Puffer Seite 15 von 44
16 Gegeben sind vier Rechtecke und ein Dreieck: P1 mit den Eckpunkten(4,2,-2),(10,2,4),(10,5,4)und(4,5,-2) P2 mit den Eckpunkten(4,4,4),(10,4,-2),(10,7,-2)und(4,7,4) P3 mit den Eckpunkten(3,1,-3),(8,6,7),(6,8,7)und(1,3,-3) P4 mit den Eckpunkten(10,1,2),(12,3,2),(10,5,6)und(8,3,6) Diese Polygone sollen mittels eines auf einem z Puffer basierendem Algorithmus in der obigen Reihenfolge dargestellt werden. Als Bildebene wird die xy Ebene angenommen, die Blickrichtung ist von der positiven z Achse in Richtung Ursprung, und es wird eine Parallelprojektion vorgenommen (d.h. es gibt keine perspektivische Verkürzung o.ä.). Es soll ein Rasterbild der Größe 12 x 8 erzeugt werden, bei dem die Sichtbarkeit innerhalb eines Pixels durch die Sichtbarkeit im Pixelmittelpunkt festgelegt wird. Tragen Sie die Ergebnisse des Verfahrens in die auf der nächsten Seite gegebenen Bereiche für das Bild und z- Puffer ein. Hier (Bild) sollen sie - z.b. durch Angabe des richtigen Kürzels wie P1 oder P2, oder durch farbiges ausfüllen -angeben, welches der Polygone in jedem Pixel zu sehen ist. Hier (z- Puffer) sollen Sie den letztgültigen z-wert für jedes belegte Pixel eintragen. Beachten Sie auch bitte dass für dieses Beispiel die Regel gilt dass bei gleichem z-wert bereits gefüllte Pixel nicht überschrieben werden! Aufgabe2 Constructive Solid Geometry Gegeben ist die im linken Raster aufgezeichnete schwarze Fläche: Seite 16 von 44
 sind dabei ausschließlich die drei neben dem Raster angegebenen schwarzen Figuren zu verwenden, die nicht rotiert oder skaliert, sondern ausschließlich")
17 Skizzieren Sie einen 2D CSG Baum, der die oben angegebene schwarze Fläche mit möglichst wenig Endknoten repräsentiert. Als Endknoten (geometrisches Grundobjekte) sind dabei ausschließlich die drei neben dem Raster angegebenen schwarzen Figuren zu verwenden, die nicht rotiert oder skaliert, sondern ausschließlich verschoben und durch die drei CSG-Operationen (Vereinigung, Durchschnitt und Subtraktion) verbunden werden dürfen. Der Raster rund um die Grundbausteine gehört nicht zu den Bausteinen selbst, sondern dient nur dazu ihre Größe (3 mal 3 mit Loch in der Mitte etc.) deutlich zu zeigen. Geben Sie im CSG-Baum die Platzierung der Endbausteine in Pixelkoodinaten in Bezug auf die linke untere Ecke des Bausteins an. (0,0) würde beispielsweise einen Baustein in der linken unteren Ecke des Rasters angeben, (13,7) einen Baustein A in der rechten oberen Ecke, und (13,9) einen Baustein C in der rechten oberen Ecke. Beachten Sie bitte auch dass es mehrere relativ gute en gibt und Sie nicht unbedingt die effizienteste Version angeben müssen um alle Punkte zu bekommen. Sie müssen auch nicht unbedingt alle Bausteinsorten verwenden. Aufgabe 3 Ausgabe von Linien Gegeben sind zwei Linien, die durch die Endpunkte (1, 8) und (11, 1) sowie (4, 8) und (12, 5) definiert sind. Geben Sie die erste dieser Linien mit dem Bresenham Verfahren im untenstehenden Raster aus, und verwenden Sie für die zweite Linie das DDA-Verfahren. Geben Sie alle Zwischenschritte der beiden Algorithmen (gegebenenfalls auf einem Beiblatt) an. Seite 17 von 44
18 Aufgabe 1 z Puffer Gegeben sind vier Rechtecke und ein Dreieck: P1 mit den Eckpunkten (8,8,6), (8,3,1) und (3,3,1) P2 mit den Eckpunkten (4,5,-2), (10,5,4), (10,7,4) und (4,7,-2) P3 mit den Eckpunkten (7,1,7), (9,1,5), (9,6,0) und (7,6,2) P4 mit den Eckpunkten (8,3,2), (6,3,0), (6,6,3) und (8,6,5) Diese Polygone sollen mittels eines auf einem z Puffer basierendem Algorithmus in der obigen Reihenfolge dargestellt werden. Als Bildebene wird die xy Ebene angenommen, die Blickrichtung ist von der positiven z Achse in Richtung Ursprung, und es wird eine Parallelprojektion vorgenommen (d.h. es gibt keine perspektivische Verkürzung o.ä.). Es soll ein Rasterbild der Größe 12 x 8 erzeugt werden, bei dem die Sichtbarkeit innerhalb eines Pixels durch die Sichtbarkeit im Pixelmittelpunkt festgelegt wird. Tragen Sie die Ergebnisse des Verfahrens in die auf der nächsten Seite gegebenen Bereiche für das Bild und z- Puffer ein. Hier (Bild) sollen sie - z.b. durch Angabe des richtigen Kürzels wie P1 oder P2, oder durch farbiges ausfüllen -angeben, welches der Polygone in jedem Pixel zu sehen ist. Hier (z- Puffer) sollen Sie den letztgültigen z-wert für jedes belegte Pixel eintragen. Beachten Sie auch bitte dass für dieses Beispiel die Regel gilt dass bei gleichem z-wert bereits gefüllte Pixel nicht überschrieben werden! Seite 18 von 44
19 Aufgabe 2 Natural Cubic Splines (selbes Beispiel ist im CG1repetitorium2008.pdf!) Gegeben sind die folgenden Stützpunkte: Punkt P1 : (-1,1) Punkt P2 : (0,3) Punkt P3 : (1,0) Weiters ist gegeben dass der Anstieg beider Splines im Punkt P2 mit -5 angenommen werden soll, und dass außerdem die zweite Ableitung am Punkt P2 für beide Kurven -10 beträgt. Wie lautet die explizite Form (d.h. die Form mit 4 Koeffizienten pro Segment, und daher insgesamt 8 Unbekannten für die beiden Segmente zusammen.) der beiden Polynome? Die Graphik zeigt einen Plot der beiden Kurvensegmente die als Resultat dieser Interpolation entstehen. Aufgabe 3 Constructive Solid Geometry Gegeben ist die im linken Raster aufgezeichnete schwarze Fläche: Seite 19 von 44
 sind dabei ausschließlich die drei neben dem Raster angegebenen schwarzen Figuren zu verwenden, die nicht rotiert oder skaliert, sondern ausschließlich")
20 Skizzieren Sie einen 2D CSG Baum, der die oben angegebene schwarze Fläche mit möglichst wenig Endknoten repräsentiert. Als Endknoten (geometrisches Grundobjekte) sind dabei ausschließlich die drei neben dem Raster angegebenen schwarzen Figuren zu verwenden, die nicht rotiert oder skaliert, sondern ausschließlich verschoben und durch die drei CSG-Operationen (Vereinigung, Durchschnitt und Subtraktion) verbunden werden dürfen. Der Raster rund um die Grundbausteine gehört nicht zu den Bausteinen selbst, sondern dient nur dazu ihre Größe (3 mal 3 mit Loch in der Mitte etc.) deutlich zu zeigen. Geben Sie im CSG-Baum die Platzierung der Endbausteine in Pixelkoodinaten in Bezug auf die linke untere Ecke des Bausteins an. (0,0) würde beispielsweise einen Baustein in der linken unteren Ecke des Rasters angeben, (13,7) einen Baustein A in der rechten oberen Ecke, und (13,9) einen Baustein C in der rechten oberen Ecke. Beachten Sie bitte auch dass es mehrere relativ gute en gibt und Sie nicht unbedingt die effizienteste Version angeben müssen um alle Punkte zu bekommen. Sie müssen auch nicht unbedingt alle Bausteinsorten verwenden. Seite 20 von 44
21 Aufgabe 1 Transformationsmatrizen Ein Objekt, das sich bereits in einer durch zwei Drehungen Ф und Ѳ (Ф dreht um die z-achse, und Ѳ um die y-achse; für eine beliebige Drehung im Raum sind bekanntlich nur zwei Drehwinkel erforderlich.) und eine Verschiebung (tx, ty, tz) bestimmten Lage im Raum befindet (siehe Skizze), soll in Bezug auf die x -Achse seiner Objektkoordinaten (Das lokale Koordinatensystem des Objektes, das in der Skizze als x, y und z bezeichnet wird, und das gegenüber den Weltkoordinaten um die erwähnten Winkel Ф und Ѳ verdreht ist) um den Faktor (6, 1, 8) für die verschiedenen Koordinatenachsen skaliert werden. Geben Sie die Abfolge und den Inhalt der Transformationsmatrizen für Weltkoordinaten (Das globale Koordinatensystem, welches in der Skizze durch die Hauptachsen x, y und z gegeben ist.) an, die dazu nötig sind; es ist nicht erforderlich, dass Sie die Kette der Transformationen auch ausmultiplizieren. Aufgabe 2 Gouraud- Interpolation und Phong- Schattierung Führen Sie für die Schattierung des mit * gekennzeichnete Pixels in dem unten in einem Pixelraster angegebenen Polygon eine Gouraud Interpolation durch. Als Schattierungsmodell soll das Phong- Modell verwendet werden. Die Normalvektoren an den Eckpunkten sind wie folgt gegeben: Punkt A: (-0.5, 0.3, 3.7) Punkt B: (1, -0.9, 4) Punkt C: (1.6, 0.9, 3.2) Punkt D: (-0.2, 0.7, 2) Seite 21 von 44
22 Die Richtung zur Lichtquelle ist durch den Vektor (-0.7, 1.2, 9), der Blickvektor als (0, 0, -1) gegeben. Die Intensität der Lichtquelle ist 1.5, die Materialkonstante betragt 0.8, ist mit 0.7 anzunehmen und der Exponent n betragt 75. Die Rasterung der Polygongrenzen ist für die relevanten Pixel eindeutig: es ist das Kästchen zu wählen, durch das der Großteil der Linie verläuft. Aufgabe 3 Ausgabe von Linien Gegeben sind zwei Linien, die durch die Endpunkte (1, 5) und (12, 6) sowie (1, 8) und (12, 2) definiert sind. Geben Sie die erste dieser Linien mit dem Bresenham Verfahren im untenstehenden Raster aus, und verwenden Sie für die zweite Linie das DDA-Verfahren. Geben Sie alle Zwischenschritte der beiden Algorithmen (gegebenenfalls auf einem Beiblatt) an. Seite 22 von 44
23 Aufgabe 1 z Puffer (kam genauso auch am ) Gegeben sind vier Rechtecke und ein Dreieck: P1 mit den Eckpunkten (8,8,6), (8,3,1) und (3,3,1) P2 mit den Eckpunkten (4,5,-2), (10,5,4), (10,7,4) und (4,7,-2) P3 mit den Eckpunkten (7,1,7), (9,1,5), (9,6,0) und (7,6,2) P4 mit den Eckpunkten (8,3,2), (6,3,0), (6,6,3) und (8,6,5) Diese Polygone sollen mittels eines auf einem z Puffer basierendem Algorithmus in der obigen Reihenfolge dargestellt werden. Als Bildebene wird die xy Ebene angenommen, die Blickrichtung ist von der positiven z Achse in Richtung Ursprung, und es wird eine Parallelprojektion vorgenommen (d.h. es gibt keine perspektivische Verkürzung o.ä.). Die Polygone sollen beginnend mit P1, P2, P3, P4 gezeichnet werden Es soll ein Rasterbild der Größe 12 x 8 erzeugt werden, bei dem die Sichtbarkeit innerhalb eines Pixels durch die Sichtbarkeit im Pixelmittelpunkt festgelegt wird. Tragen Sie die Ergebnisse des Verfahrens in die auf der nächsten Seite gegebenen Bereiche für das Bild und z- Puffer ein. Hier (Bild) sollen sie - z.b. durch Angabe des richtigen Kürzels wie P1 oder P2, oder durch farbiges ausfüllen -angeben, welches der Polygone in jedem Pixel zu sehen ist. Hier (z- Puffer) sollen Sie den letztgültigen z-wert für jedes belegte Pixel eintragen. Beachten Sie auch bitte dass für dieses Beispiel die Regel gilt dass bei gleichem z-wert bereits gefüllte Pixel nicht überschrieben werden! Aufgabe 2 Gouraud- Interpolation und Phong- Schattierung (kam genauso auch am ) Seite 23 von 44
24 Führen Sie für die Schattierung des mit * gekennzeichnete Pixels in dem unten in einem Pixelraster angegebenen Polygon eine Gouraud Interpolation durch. Als Schattierungsmodell soll das Phong- Modell verwendet werden. Die Normalvektoren an den Eckpunkten sind wie folgt gegeben: Punkt A: (-0.5, 0.3, 3.7) Punkt B: (1, -0.9, 4) Punkt C: (1.6, 0.9, 3.2) Punkt D: (-0.2, 0.7, 2) Die Richtung zur Lichtquelle ist durch den Vektor (-0.7, 1.2, 9), der Blickvektor als (0, 0, -1) gegeben. Die Intensität der Lichtquelle ist 1.5, die Materialkonstante beträgt 0.8, ist mit 0.7 anzunehmen und der Exponent n betragt 75. Die Rasterung der Polygongrenzen ist für die relevanten Pixel eindeutig: es ist das Kästchen zu wählen, durch das der Großteil der Linie verläuft. Aufgabe 3 Ausgabe von Linien (kam genauso auch am ) Gegeben sind zwei Linien, die durch die Endpunkte (1, 5) und (12, 6) sowie (1, 8) und (12, 2) definiert sind. Geben Sie die erste dieser Linien mit dem Bresenham Verfahren im untenstehenden Raster aus, und verwenden Sie für die zweite Linie das DDA-Verfahren. Geben Sie alle Zwischenschritte der beiden Algorithmen (gegebenenfalls auf einem Beiblatt) an. Seite 24 von 44
25 Aufgabe 1 z Puffer (kam genauso auch am ) Gegeben sind vier Rechtecke und ein Dreieck: P1 mit den Eckpunkten (1,4,5), (3,4,5), (3,8,1) und (1,8,1) P2 mit den Eckpunkten (2,5,5), (5,5,5) und (5,8,2) P3 mit den Eckpunkten (3,3,2), (6,6,5) und (3,6,5) P4 mit den Eckpunkten (3,4,9), (7,4,5), (7,7,-1) und (3,7,3) Diese Polygone sollen mittels eines auf einem z Puffer basierendem Algorithmus in der obigen Reihenfolge dargestellt werden. Als Bildebene wird die xy Ebene angenommen, die Blickrichtung ist von der positiven z Achse in Richtung Ursprung, und es wird eine Parallelprojektion vorgenommen (d.h. es gibt keine perspektivische Verkürzung o.ä.). Die Polygone sollen beginnend mit P1, P2, P3 und P4 gezeichnet werden Es soll ein Rasterbild der Größe 12 x 8 erzeugt werden, bei dem die Sichtbarkeit innerhalb eines Pixels durch die Sichtbarkeit im Pixelmittelpunkt festgelegt wird. Tragen Sie die Ergebnisse des Verfahrens in die auf der nächsten Seite gegebenen Bereiche für das Bild und z- Puffer ein. Hier (Bild) sollen sie - z.b. durch Angabe des richtigen Kürzels wie P1 oder P2, oder durch farbiges ausfüllen -angeben, welches der Polygone in jedem Pixel zu sehen ist. Hier (z- Puffer) sollen Sie den letztgültigen z-wert für jedes belegte Pixel eintragen. Beachten Sie auch bitte dass für dieses Beispiel die Regel gilt dass bei gleichem z-wert bereits gefüllte Pixel nicht überschrieben werden! Seite 25 von 44
26 Aufgabe 2 Cubic Splines Gesucht ist die explizite Form einer Cubic Spline. Die explizite Form ist eine Gleichung mit 4 Koeffizienten pro Segment, und daher insgesamt 8 Unbekannten für die beiden Segmente zusammen. Gegeben sind die folgenden Stützpunkte: Punkt P1 : (-1, 0) Punkt P2 : (0, 1) Punkt P3 : (1, -2) Beide Splinesegmente weisen im Punkt P2 die gleiche Tangentensteigung von -2 auf, und zusätzlich ist bekannt, dass der erste Abschnitt einen Wendepunkt an der x-koordinate -0.5 und der zweite Abschnitt einen Wendepunkt an der x-koordinate 0.5 besitzt. Aufgabe 3 Constructive Solid Geometry Gegeben ist die im linken Raster aufgezeichnete schwarze Fläche: Seite 26 von 44
 sind dabei ausschließlich die drei neben dem Raster angegebenen schwarzen Figuren zu verwenden, die nicht rotiert oder skaliert, sondern ausschließlich")
27 Skizzieren Sie einen 2D CSG Baum, der die oben angegebene schwarze Fläche mit möglichst wenig Endknoten repräsentiert. Als Endknoten (geometrisches Grundobjekte) sind dabei ausschließlich die drei neben dem Raster angegebenen schwarzen Figuren zu verwenden, die nicht rotiert oder skaliert, sondern ausschließlich verschoben und durch die drei CSG-Operationen (Vereinigung, Durchschnitt und Subtraktion) verbunden werden dürfen. Achtung: Das jeweilige lokale Koordinatensystem der drei Bauteile hat seinen Ursprung jeweils im schwarzen Punkt (linke obere Ecke). Geben Sie im CSG-Baum die Platzierung der Endbausteine in Pixelkoodinaten unter Berücksichtigung des lokalen Koordinatensystems an. B (0, 9) würde beispielsweise Baustein B so positionieren, dass seine schwarzen Kästchen an den Stellen (2, 8) (2, 7) und (2, 6) zu liegen kommen Beachten Sie bitte auch dass es mehrere relativ gute en gibt und Sie nicht unbedingt die effizienteste Version angeben müssen um alle Punkte zu bekommen. Sie müssen auch nicht unbedingt alle Bausteinsorten verwenden Aufgabe 1 Ausgabe von Linien Gegeben sind zwei Linien, die durch die Endpunkte (1, 1) und (2, 8) sowie (1, 8) und (12, 1) definiert sind. Geben Sie die erste dieser Linien mit dem Bresenham Verfahren im untenstehenden Raster aus, und verwenden Sie für die zweite Linie das DDA-Verfahren. Geben Sie alle Zwischenschritte der beiden Algorithmen (gegebenenfalls auf einem Beiblatt) an. Seite 27 von 44
28 Aufgabe 2 Natural Cubic Splines Gegeben sind die folgenden Stützpunkte: Punkt P1 : (-1, 2) Punkt P2 : (0, 3) Punkt P3 : (1, 1) Weiters ist gegeben dass der Anstieg beider Splines im Punkt P2 mit 2 angenommen werden soll, und dass außerdem die zweite Ableitung am Punkt P2 für beide Kurven 1 beträgt. Wie lautet die explizite Form (d.h. die Form mit 4 Koeffizienten pro Segment, und daher insgesamt 8 Unbekannten für die beiden Segmente zusammen.) der beiden Polynome? Aufgabe 3 Constructive Solid Geometry Gegeben ist die im linken Raster aufgezeichnete schwarze Fläche: Seite 28 von 44
 sind dabei ausschließlich die drei neben dem Raster angegebenen schwarzen Figuren zu verwenden, die nicht rotiert oder skaliert, sondern ausschließlich")
29 Skizzieren Sie einen 2D CSG Baum, der die oben angegebene schwarze Fläche mit möglichst wenig Endknoten repräsentiert. Als Endknoten (geometrisches Grundobjekte) sind dabei ausschließlich die drei neben dem Raster angegebenen schwarzen Figuren zu verwenden, die nicht rotiert oder skaliert, sondern ausschließlich verschoben und durch die drei CSG-Operationen (Vereinigung, Durchschnitt und Subtraktion) verbunden werden dürfen. Achtung: Das jeweilige lokale Koordinatensystem der drei Bauteile hat seinen Ursprung jeweils im schwarzen Punkt (linke obere Ecke). Geben Sie im CSG-Baum die Platzierung der Endbausteine in Pixelkoodinaten unter Berücksichtigung des lokalen Koordinatensystems an. B (0, 9) würde beispielsweise Baustein B so positionieren, dass seine schwarzen Kästchen an den Stellen (2, 8) (2, 7) und (2, 6) zu liegen kommen Beachten Sie bitte auch dass es mehrere relativ gute en gibt und Sie nicht unbedingt die effizienteste Version angeben müssen um alle Punkte zu bekommen. Sie müssen auch nicht unbedingt alle Bausteinsorten verwenden Aufgabe 1 Constructive Solid Geometry Gegeben ist die im linken Raster aufgezeichnete schwarze Fläche: Seite 29 von 44
30 Skizzieren Sie einen 2D CSG Baum, der die oben angegebene schwarze Fläche mit möglichst wenig Endknoten repräsentiert. Als Endknoten (geometrisches Grundobjekte) sind dabei ausschließlich die drei neben dem Raster angegebenen schwarzen Figuren zu verwenden, die nicht rotiert oder skaliert, sondern ausschließlich verschoben und durch die drei CSG-Operationen (Vereinigung, Durchschnitt und Subtraktion) verbunden werden dürfen. Achtung: Das jeweilige lokale Koordinatensystem der drei Bauteile hat seinen Ursprung jeweils im schwarzen Punkt (linke obere Ecke). Geben Sie im CSG-Baum die Platzierung der Endbausteine in Pixelkoodinaten unter Berücksichtigung des lokalen Koordinatensystems an. B (0, 9) würde beispielsweise Baustein B so positionieren, dass seine schwarzen Kästchen an den Stellen (2, 8) (2, 7) und (2, 6) zu liegen kommen Beachten Sie bitte auch dass es mehrere relativ gute en gibt und Sie nicht unbedingt die effizienteste Version angeben müssen um alle Punkte zu bekommen. Sie müssen auch nicht unbedingt alle Bausteinsorten verwenden. Aufgabe 2 Phong- Interpolation und Phong- Schattierung Führen Sie für die Schattierung des mit * gekennzeichnete Pixels in dem unten in einem Pixelraster angegebenen Polygon eine Phong Interpolation durch. Als Schattierungsmodell soll das Phong- Modell verwendet werden. Die Normalvektoren an den Eckpunkten sind wie folgt gegeben: Punkt A: (-2, 0, 0) Punkt B: (1, 0, 0) Seite 30 von 44
31 Punkt C: (0, 4, 0) Punkt D: (0, 0, 1) Die Richtung zur Lichtquelle ist durch den Vektor (-2, 2, 1), der Blickvektor als (0, 0, -1) gegeben. Die Intensität der Lichtquelle ist 1.2, die Materialkonstante beträgt 0.5, ist mit 0.75 anzunehmen und der Exponent n betragt 4. Die Rasterung der Polygongrenzen ist für die relevanten Pixel eindeutig: es ist das Kästchen zu wählen, durch das der Großteil der Linie verläuft. Aufgabe 3 Hermite Splines Gesucht sind die parametrischen Formen von zwei Hermite Splines. Die parametrische Form ist eine Vektorgleichung mit 8 Koeffizienten pro Segment, und daher 16 Unbekannten für die beiden Segmente insgesamt. Das erste Segment geht vom ersten zum zweiten Kontrollpunkt und das zweite Segment vom zweiten zum dritten Kontrollpunkt. Zusätzlich soll der Übergang vom ersten auf das zweite Segment C1 stetig sein. Gegeben sind die folgenden Stützpunkte: Punkt P1 : (-1, 0) Punkt P2 : (0, 1) Punkt P3 : (1, -2) Und folgende Tangenten: Tangente im Punkt P1 : (1, 10) Tangente im Punkt P2 : (1, 1) Tangente im Punkt P3 : (1, 1) Seite 31 von 44
32 Aufgabe 1 Back Face Culling Gegeben sind die fünf Punkte: A = (0, 0, 0) B = (1, 0, 1) C = (5, 0, 1) D = (1, 8, 1) E = (8, 1, 1) die die drei Dreiecke ABE, BCE und CDE aufspannen. Die Dreiecksvorderseite ist dabei die Seite, die sichtbar wird, wenn die Dreieckspunkte gegen den Uhrzeigersinn geordnet sichtbar sind. Die Dreiecksrückseite ist daher die Seite, die sichtbar wird, wenn die Dreieckspunkte im Uhrzeigersinn geordnet sichtbar sind. Zusätzlich ist die Blickrichtung V = (0, 1, 1) bekannt. Es wird eine Parallel- Projektion angenommen. Berechnen sie mittels Back-Face-Culling welche der Dreiecke von dieser Blickrichtung aus sichtbar sind. Aufgabe 2 Phong- Interpolation und Phong- Schattierung Führen Sie für die Schattierung des mit * gekennzeichnete Pixels in dem unten in einem Pixelraster angegebenen Polygon eine Phong Interpolation durch. Als Schattierungsmodell soll das Phong- Modell verwendet werden. Die Normalvektoren an den Eckpunkten sind wie folgt gegeben: Punkt A: (-2, 2, 0) Punkt B: (1, 1, 0) Punkt C: (0.3, 0.3, 0.3) Punkt D: (0, 1, 0) Die Richtung zur Lichtquelle ist durch den Vektor (-2, 3, 1), der Blickvektor als (0, 0, -1) gegeben. Die Intensität der Lichtquelle ist 0.9, die Materialkonstante beträgt 0.3, ist mit 0.5 anzunehmen und der Exponent n betragt 6. Die Rasterung der Polygongrenzen ist für die relevanten Pixel eindeutig: es ist das Kästchen zu wählen, durch das der Großteil der Linie verläuft. Seite 32 von 44

33 Aufgabe 3 - Transformationen Gesucht ist die Matrix die Punkte vom Welt-Koordinatensystem (WKS) in das Kamera- Koordinatensystem (KKS) transformiert. Es wird dabei ein rechts-händiges Koordinatensystem für die Kamera angenommen und weiters sind gegeben: Blickrichtung V = (0, -0.1, -1), Up-Vektor U = (0, 1, 0) und Position P = (5, 0, 1) (alle im WKS). Dabei legt V die z-achse des KKS fest und U wird verwendet, um die y-achse des KKS zu bestimmen Aufgabe 1 Back Face Culling Gegeben sind die fünf Punkte: A = (1, 0, 0) B = (1, 1, 1) C = (2, 3, 1) D = (2, 3, 1) E = (2, 1, -1) welche die drei Dreiecke ABE, BCE und CDE aufspannen. Die Dreiecksvorderseite ist dabei die Seite, die sichtbar wird, wenn die Dreieckspunkte gegen den Uhrzeigersinn geordnet sichtbar sind. Die Dreiecksrückseite ist daher die Seite, die sichtbar wird, wenn die Dreieckspunkte im Uhrzeigersinn geordnet sichtbar sind. Zusätzlich ist die Blickrichtung V = (0, -1, 1) bekannt. Es wird eine Parallel- Seite 33 von 44
34 Projektion angenommen. Berechnen sie mittels Back-Face-Culling welche der Dreiecke von dieser Blickrichtung aus sichtbar sind. Hinweis: Begründen Sie etwaige Sonderfälle. Aufgabe 2 Hermite Splines Gesucht sind die parametrischen Formen zweier Hermite Splines. Die parametrische Form ist eine Vektorgleichung mit 8 Koeffizienten pro Segment, und daher 16 Unbekannten für die beiden Segmente insgesamt. Das erste Segment geht vom ersten zum zweiten Kontrollpunkt und das zweite Segment vom zweiten zum dritten Kontrollpunkt. Zusätzlich soll der Übergang vom ersten auf das zweite Segment C1 stetig sein. Gegeben sind die folgenden Stützpunkte: Punkt P1 : (-1, 1) Punkt P2 : (0, 2) Punkt P3 : (1, 2) Und folgende Tangenten: Tangente im Punkt P1 : (1, 5) Tangente im Punkt P2 : (0, 2) Tangente im Punkt P3 : (1, 0) Aufgabe 3 Transformationen (selbes Beispiel ist im CG1repetitorium2008.pdf!) Gesucht ist die Matrix die Punkte vom Welt-Koordinatensystem (WKS) in das Kamera- Koordinatensystem (KKS) transformiert. Es wird dabei ein rechts-händiges Koordinatensystem für die Kamera angenommen und weiters sind gegeben: Blickrichtung V = (0, -3, 0), Up-Vektor U = (2, 0, 0) und Position P = (3, 4, 5) (alle im WKS). Dabei legt V die z-achse des KKS fest und U wird verwendet, um die y-achse des KKS zu bestimmen. Welche Koordinaten besitzt der Punkt P im KKS? Aufgabe 1 Matrizen und Transformationen Seite 34 von 44
35 Gegeben sind vier Matrizen M1, M2, M3 und M4.Welche dieser vier Matrizen sind idempotent (d.h. Mi*Mi = Mi )? Welche dieser vier Matrizen sind ihr eigenes Inverses (d.h. Mi*Mi = I)? * Bezeichnet hierbei das Matrixprodukt und I ist die Identitätsmatrix I = M2. Gegeben sei ein Punkt P = (x, y, z, w). Berechnen Sie Mi*P, d.h. transformieren Sie diesen Punkt mit jeder der vier Matrizen und interpretieren Sie das Ergebnis. Hinweis: Kann man z.b. M4 als eine Rotation interpretieren? Wenn ja, welche? Aufgabe 2 Constructive Solid Geometry Gegeben ist die im linken Raster aufgezeichnete schwarze Fläche: Seite 35 von 44
36 Skizzieren Sie einen 2D CSG Baum, der die oben angegebene schwarze Fläche mit möglichst wenig Endknoten repräsentiert. Als Endknoten (geometrisches Grundobjekte) sind dabei ausschließlich die drei neben dem Raster angegebenen schwarzen Figuren zu verwenden, die nicht rotiert oder skaliert, sondern ausschließlich verschoben und durch die drei CSG-Operationen (Vereinigung, Durchschnitt und Subtraktion) verbunden werden dürfen. Achtung: Das jeweilige lokale Koordinatensystem der drei Bauteile hat seinen Ursprung jeweils im schwarzen Punkt (linke obere Ecke). Geben Sie im CSG-Baum die Platzierung der Endbausteine in Pixelkoodinaten unter Berücksichtigung des lokalen Koordinatensystems an. B (0, 9) würde beispielsweise Baustein B so positionieren, dass seine schwarzen Kästchen an den Stellen (2, 8) (2, 7) und (2, 6) zu liegen kommen Beachten Sie bitte auch dass es mehrere relativ gute en gibt und Sie nicht unbedingt die effizienteste Version angeben müssen um alle Punkte zu bekommen. Sie müssen auch nicht unbedingt alle Bausteinsorten verwenden. Aufgabe 3 Diffuse Beleuchtungssituation mit zwei Lichtern (selbes Beispiel ist im CG1repetitorium2008.pdf!) Ein Punkt P wird von zwei rundumstrahlenden, (Kugelstrahler) weißen Lichtquellen beleuchtet. Die gesamte Beleuchtungssituation wird als rein diffus angenommen, d.h. es existiert kein spekularer Anteil. Gesucht ist die Farbe im Punkte P, die durch diese Beleuchtungssituation entsteht. Dabei ist eine Farbe ein Vektor mit einer roten, grünen und blauen Komponente, d.h. Farben sind von der Form = (R, G, B). Zum Beispiel ist die Farbe Weiß = (1, 1, 1) und Schwarz = (0, 0, 0). P liegt an den Koordinaten P = (5, 5, 5) und hat die Normale n =(0, 1, 0). Die Materialfarbe an diesem Punkt ist M = (0, 0.2, 0.3) Das erste Licht L1 liegt an den Koordinaten L1 = (8, 10, 8) und hat die Intensität I =1. Das zweite Licht L2 liegt an den Koordinaten L2 = (-8, 10, -8) und hat die Intensität I =1. Seite 36 von 44
37 Aufgabe 1 Natural Cubic Splines Gegeben sind die folgenden Stützpunkte: Punkt P1 : (-2, 2) Punkt P2 : (-1, 1) Punkt P3 : (0, 4) Weiters ist gegeben dass der Anstieg beider Splines im Punkt P2 mit 0 angenommen werden soll, und dass außerdem die zweite Ableitung am Punkt P2 für beide Kurven 0 betragen. Wie lautet die explizite Form (d.h. die Form mit 4 Koeffizienten pro Segment, und daher insgesamt 8 Unbekannten für die beiden Segmente zusammen.) der beiden Polynome? Aufgabe 2 Constructive Solid Geometry Gegeben ist die im linken Raster aufgezeichnete schwarze Fläche: Skizzieren Sie einen 2D CSG Baum, der die oben angegebene schwarze Fläche mit möglichst wenig Endknoten repräsentiert. Seite 37 von 44
38 Als Endknoten (geometrisches Grundobjekte) sind dabei ausschließlich die drei neben dem Raster angegebenen schwarzen Figuren zu verwenden, die nicht rotiert oder skaliert, sondern ausschließlich verschoben und durch die drei CSG-Operationen (Vereinigung, Durchschnitt und Subtraktion) verbunden werden dürfen. Achtung: Das jeweilige lokale Koordinatensystem der drei Bauteile hat seinen Ursprung jeweils im schwarzen Punkt (linke obere Ecke). Geben Sie im CSG-Baum die Platzierung der Endbausteine in Pixelkoodinaten unter Berücksichtigung des lokalen Koordinatensystems an. C (0, 9) würde beispielsweise Baustein C so positionieren, dass seine schwarzen Kästchen an den Stellen (1, 8) und (3, 6) zu liegen kommen Beachten Sie bitte auch dass es mehrere relativ gute en gibt und Sie nicht unbedingt die effizienteste Version angeben müssen um alle Punkte zu bekommen. Sie müssen auch nicht unbedingt alle Bausteinsorten verwenden. Aufgabe 3 Diffuse Beleuchtungssituation mit zwei Lichtern Ein Punkt P wird von zwei rundumstrahlenden, weißen Punktlichtquellen beleuchtet. Die gesamte Beleuchtungssituation wird als rein diffus angenommen, d.h. es existiert kein spekularer Anteil. Gesucht ist die Farbe im Punkte P, die durch diese Beleuchtungssituation entsteht. Dabei ist eine Farbe ein Vektor mit einer roten, grünen und blauen Komponente, d.h. Farben sind von der Form = (R, G, B). Zum Beispiel ist die Farbe Weiß = (1, 1, 1) und Schwarz = (0, 0, 0). P liegt an den Koordinaten P = (3, 3, 3) und hat die Normale n = (0, -1, 0). Die Materialfarbe an diesem Punkt ist C = (0.3, 0.1, 0.4). der diffuse Reflexionskoeffizient sei = 1.0. Das erste Licht L1 liegt an den Koordinaten L1 = (5, 1, 4) und hat die Helligkeit = 1.0 Das zweite Licht L2 liegt an den Koordinaten L2 = (1, 1, 2) und hat die Helligkeit = 1.0 Seite 38 von 44
39 Aufgabe 1 - Transformationen Gesucht ist die Matrix die Punkte vom Welt-Koordinatensystem (WKS) in das Kamera- Koordinatensystem (KKS) transformiert. Es wird dabei ein rechts-händiges Koordinatensystem für die Kamera angenommen und weiters sind gegeben: Blickrichtung V = (2, 2, 1), der die z- Achse des KKS festgelegt, U = (0, 0, 2) der die y- Achse des KKS bestimmt und die Position der Kamera P = (3, 4, -1) (alle im WKS). Welche Koordinaten besitzt der Ursprung des WKS im KKS? Aufgabe 2 Hermite Splines Gesucht sind die parametrischen Formen zweier Hermite Splines. Die parametrische Form ist eine Vektorgleichung mit 8 Koeffizienten pro Segment, und daher 16 Unbekannten für die beiden Segmente insgesamt. Das erste Segment geht vom ersten zum zweiten Kontrollpunkt und das zweite Segment vom zweiten zum dritten Kontrollpunkt. Zusätzlich soll der Übergang vom ersten auf das zweite Segment C1 stetig sein. Gegeben sind die folgenden Stützpunkte: Punkt P1 : (-2, 2) Punkt P2 : (0, 1) Punkt P3 : (2, 1) Und folgende Tangenten: Tangente im Punkt P1 : (-2, 3) Tangente im Punkt P2 : (0, 1) Tangente im Punkt P3 : (2, 2) Aufgabe 3 Diffuse Beleuchtungssituation mit zwei Lichtern Seite 39 von 44
40 Ein Punkt P wird von zwei rundumstrahlenden, weißen Punktlichtquellen beleuchtet. Die gesamte Beleuchtungssituation wird als rein diffus angenommen, d.h. es existiert kein spekularer Anteil. Gesucht ist die Farbe im Punkte P, die durch diese Beleuchtungssituation entsteht. Dabei ist eine Farbe ein Vektor mit einer roten, grünen und blauen Komponente, d.h. Farben sind von der Form = (R, G, B). Zum Beispiel ist die Farbe Weiß = (1, 1, 1) und Schwarz = (0, 0, 0). P liegt an den Koordinaten P = (5, 3, 5) und hat die Normale n = (0, -1, 1). Die Materialfarbe an diesem Punkt ist C = (0.1, 0.3, der diffuse Reflexionskoeffizient sei = 0.5. Das erste Licht L1 liegt an den Koordinaten L1 = (7, 1, 6) und hat die Helligkeit = 2.0. Das zweite Licht L2 liegt an den Koordinaten L2 = (1, 4, 2) und hat die Helligkeit = Aufgabe 1 z Puffer (kam genauso auch am und ) Gegeben sind vier Rechtecke und ein Dreieck: P1 mit den Eckpunkten (1,4,5), (3,4,5), (3,8,1) und (1,8,1) P2 mit den Eckpunkten (2,5,5), (5,5,5) und (5,8,2) P3 mit den Eckpunkten (3,3,2), (6,6,5) und (3,6,5) P4 mit den Eckpunkten (3,4,9), (7,4,5), (7,7,-1) und (3,7,3) Diese Polygone sollen mittels eines auf einem z Puffer basierendem Algorithmus in der obigen Reihenfolge dargestellt werden. Als Bildebene wird die xy Ebene angenommen, die Blickrichtung ist von der positiven z Achse in Richtung Ursprung, und es wird eine Parallelprojektion vorgenommen (d.h. es gibt keine perspektivische Verkürzung o.ä.). Die Polygone sollen mit P1 beginnend und dann P2, P3 und P4 gezeichnet werden. Es soll ein Rasterbild der Größe 12 x 8 erzeugt werden, bei dem die Sichtbarkeit innerhalb eines Pixels durch die Sichtbarkeit im Pixelmittelpunkt festgelegt wird. Tragen Sie die Ergebnisse des Verfahrens in die auf der nächsten Seite gegebenen Bereiche für das Bild und z- Puffer ein. Hier (Bild) sollen sie - z.b. durch Angabe des richtigen Kürzels wie P1 oder P2, oder durch farbiges ausfüllen -angeben, welches der Polygone in jedem Pixel zu sehen ist. Hier (z- Puffer) sollen Sie den letztgültigen z-wert für jedes belegte Pixel eintragen. Beachten Sie auch bitte dass für dieses Beispiel die Regel gilt dass bei gleichem z-wert bereits gefüllte Pixel nicht überschrieben werden! Seite 40 von 44
41 Aufgabe 2 Natural Cubic Splines Gegeben sind die folgenden Stützpunkte: Punkt P1 : (-1, 2) Punkt P2 : (0, 3) Punkt P3 : (1, 1) Weiters ist gegeben dass der Anstieg beider Splines im Punkt P2 mit 2 angenommen werden soll, und dass außerdem die zweite Ableitung am Punkt P2 für beide Kurven 1 betragen. Wie lautet die explizite Form (d.h. die Form mit 4 Koeffizienten pro Segment, und daher insgesamt 8 Unbekannten für die beiden Segmente zusammen.) der beiden Polynome? Aufgabe 3 Back Face Culling (kam genauso auch am ) Gegeben sind die fünf Punkte: A = (1, 0, 0) B = (1, 1, 1) C = (2, 3, 1) D = (2, 3, 1) E = (2, 1, -1) welche die drei Dreiecke ABE, BCE und CDE aufspannen. Die Dreiecksvorderseite ist dabei die Seite, die sichtbar wird, wenn die Dreieckspunkte gegen den Uhrzeigersinn geordnet sichtbar sind. Die Dreiecksrückseite ist daher die Seite, die sichtbar wird, wenn die Dreieckspunkte im Uhrzeigersinn geordnet sichtbar sind. Zusätzlich ist die Blickrichtung V = (0, -1, 1) bekannt. Es wird eine Parallel- Projektion angenommen. Berechnen sie mittels Back-Face-Culling welche der Dreiecke von dieser Blickrichtung aus sichtbar sind. Hinweis: Begründen Sie etwaige Sonderfälle. Seite 41 von 44
42 Aufgabe 1 Matrizen und Transformationen Gegeben sind vier Matrizen M1, M2, M3 und M4. Welche dieser vier Matrizen sind idempotent (d.h. Mi*Mi = Mi)? Welche dieser vier Matrizen sind orthonormal (d.h. *Mi = I)? * Bezeichnet hierbei das Matrixprodukt und I ist die Identitätsmatrix I = M2. Welche dieser Matrizen kann als Rotation interpretieren? Wenn das der Fall ist als welche Rotation? Aufgabe 2 Cubic Splines Gesucht ist die explizite Form einer Cubic Spline. Die explizite Form ist eine Gleichung mit 4 Koeffizienten pro Segment, und daher insgesamt 8 Unbekannten für die beiden Segmente zusammen. Gegeben sind die folgenden Stützpunkte: Punkt P1 : (-1, 0) Punkt P2 : (0, 1) Punkt P3 : (1, -2) Beide Splinesegmente weisen im Punkt P2 die gleiche Tangentensteigung von -1 auf, und zusätzlich ist bekannt, dass der erste Abschnitt einen Wendepunkt an der x-koordinate -0.5 und der zweite Abschnitt einen Wendepunkt an der x-koordinate 0.5 besitzt. Seite 42 von 44
43 Aufgabe 3 Ausgabe von Linien Gegeben sind zwei Linien, die durch die Endpunkte (1, 8) und (4, 1) sowie (6, 1) und (7, 8) definiert sind. Geben Sie die erste dieser Linien mit dem Bresenham Verfahren im untenstehenden Raster aus, und verwenden Sie für die zweite Linie das DDA-Verfahren. Geben Sie alle Zwischenschritte der beiden Algorithmen (gegebenenfalls auf einem Beiblatt) an. 13. Oktober 08 Konnte leider zu dem Termin keine Angabe finden. Wenn jemand eine Angabe hat, bitte per E- Mail oder PM an mich weiter leiten damit ich es hier ergänzen kann! Mehr Infos dazu unter Infos Über die Ausarbeitung Die Fragen stammen aus dem Informatik Forum, von Kollegen die die Prüfung machten, MTB und der LVA Webseite. Falls jemand Angaben / Fragen hat die hier nicht zu finden sind, wäre es auch sehr nett sie mir zukommen zu lassen damit ich es hier ergänze/ hinzufüge! Ich habe die Ausarbeitung so gut es geht gemacht, aber trotzdem können sich Fehler einschleichen! Falls man welche findet, bitte per E- Mail oder PM an mich weiter leiten damit ich sie ausbessere! Bei rot geschriebenen Sätzen bin ich mir nicht ganz sicher ob sie so stimmen und deswegen würde ich mich sehr über Feedback (ob es so stimmt oder nicht) freuen. Seite 43 von 44
Inhaltsverzeichnis. 1 Hardwaregrundlagen
 Inhaltsverzeichnis 1 Hardwaregrundlagen 2.1 Koordinatentransformationen 2.2 Transformationen in der Ebene 2.3 Transformationen im Raum 3 Repräsentation und Modellierung von Objekten 4 Rasterung 5 Visibilität
Inhaltsverzeichnis 1 Hardwaregrundlagen 2.1 Koordinatentransformationen 2.2 Transformationen in der Ebene 2.3 Transformationen im Raum 3 Repräsentation und Modellierung von Objekten 4 Rasterung 5 Visibilität
3.1 Motivation. - Mit (mehreren) Koordinatentransformationen wird das Objektsystem in das Gerätesystem transformiert.
 Koordinatentransformationen wird das Objektsystem in das Gerätesystem transformiert.") 3.1 Motivation Wichtige Grundlage der Bildwiedergabe auf dem Bildschirm oder anderen Ausgabegeräten sind Koordinatensysteme und Koordinatentransformationen im IR 2 und IR 3. Im allgemeinen unterscheidet
3.1 Motivation Wichtige Grundlage der Bildwiedergabe auf dem Bildschirm oder anderen Ausgabegeräten sind Koordinatensysteme und Koordinatentransformationen im IR 2 und IR 3. Im allgemeinen unterscheidet
Hans Delfs. Übungen zu Mathematik III für Medieninformatik
 Hans Delfs Übungen zu Mathematik III für Medieninformatik 1 RÄUMLICHE DARSTELLUNGEN VON OBJEKTEN 1 1 Räumliche Darstellungen von Objekten Der Einheitswürfel ist der achsenparallele Würfel in A 3, der von
Hans Delfs Übungen zu Mathematik III für Medieninformatik 1 RÄUMLICHE DARSTELLUNGEN VON OBJEKTEN 1 1 Räumliche Darstellungen von Objekten Der Einheitswürfel ist der achsenparallele Würfel in A 3, der von
Lokale Beleuchtungsmodelle
 Lokale Beleuchtungsmodelle Oliver Deussen Lokale Modelle 1 Farbschattierung der Oberflächen abhängig von: Position, Orientierung und Charakteristik der Oberfläche Lichtquelle Vorgehensweise: 1. Modell
Lokale Beleuchtungsmodelle Oliver Deussen Lokale Modelle 1 Farbschattierung der Oberflächen abhängig von: Position, Orientierung und Charakteristik der Oberfläche Lichtquelle Vorgehensweise: 1. Modell
Michael Bender Martin Brill. Computergrafik. Ein anwendungsorientiertes Lehrbuch. 2., überarbeitete Auflage HANSER
 Michael Bender Martin Brill Computergrafik Ein anwendungsorientiertes Lehrbuch 2., überarbeitete Auflage HANSER Inhaltsverzeichnis Vorwort XI 1 Einleitung 1 1.1 Die Entwicklung der Computergrafik 1 1.2
Michael Bender Martin Brill Computergrafik Ein anwendungsorientiertes Lehrbuch 2., überarbeitete Auflage HANSER Inhaltsverzeichnis Vorwort XI 1 Einleitung 1 1.1 Die Entwicklung der Computergrafik 1 1.2
Transformation - Homogene Koordinaten. y + b )
") Transformation - Homogene Koordinaten In der "üblichen" Behandlung werden für die Verschiebung (Translation) und die Drehung (Rotation) verschiedene Rechenvorschriften benutzt - einmal Addition von Vektoren
Transformation - Homogene Koordinaten In der "üblichen" Behandlung werden für die Verschiebung (Translation) und die Drehung (Rotation) verschiedene Rechenvorschriften benutzt - einmal Addition von Vektoren
Computergrafik. Michael Bender, Manfred Brill. Ein anwendungsorientiertes Lehrbuch ISBN Inhaltsverzeichnis
 Computergrafik Michael Bender, Manfred Brill Ein anwendungsorientiertes Lehrbuch ISBN 3-446-40434-1 Inhaltsverzeichnis Weitere Informationen oder Bestellungen unter http://www.hanser.de/3-446-40434-1 sowie
Computergrafik Michael Bender, Manfred Brill Ein anwendungsorientiertes Lehrbuch ISBN 3-446-40434-1 Inhaltsverzeichnis Weitere Informationen oder Bestellungen unter http://www.hanser.de/3-446-40434-1 sowie
1.3 Berechnen Sie die Koordinaten der Wendepunkte des Schaubildes der Funktion f mit f( x) x 6x 13
 x 6x 13") Musteraufgaben ab 08 Pflichtteil Aufgabe Seite / BEISPIEL A. Geben Sie Lage und Art der Nullstellen der Funktion f mit f( x) ( x ) ( x ) ; x IR an.. Bestimmen Sie die Gleichung der Tangente in P( f ())
Musteraufgaben ab 08 Pflichtteil Aufgabe Seite / BEISPIEL A. Geben Sie Lage und Art der Nullstellen der Funktion f mit f( x) ( x ) ( x ) ; x IR an.. Bestimmen Sie die Gleichung der Tangente in P( f ())
Transformation - 3. Für "übliche" Anwendungen in der Geometrie ist es sinnvoll, bei Transformationen eine gleiche
 Transformation - 3 Wiederholung und spezielle Angaben im Zusammenhang mit Kreis-Berechnungen 1. Problemstellung Im Zusammenhang mit der Berechnung von Schnittflächen kann es sinnvoll sein, die Berechnung
Transformation - 3 Wiederholung und spezielle Angaben im Zusammenhang mit Kreis-Berechnungen 1. Problemstellung Im Zusammenhang mit der Berechnung von Schnittflächen kann es sinnvoll sein, die Berechnung
Füllen von Primitiven
 Füllen von Primitiven Basisproblem der 2D-Graphik Anwendung: füllen beliebiger Flächen (Polygone, Freiformkurven) Darstellung von Buchstaben dicke Primitive (Linien, Kreise, Kurven), Teilproblem in der
Füllen von Primitiven Basisproblem der 2D-Graphik Anwendung: füllen beliebiger Flächen (Polygone, Freiformkurven) Darstellung von Buchstaben dicke Primitive (Linien, Kreise, Kurven), Teilproblem in der
Klausurenkurs zum Staatsexamen (SS 2014): Lineare Algebra und analytische Geometrie 8
: Lineare Algebra und analytische Geometrie 8") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (SS 204): Lineare Algebra und analytische Geometrie 8 8. (Herbst 202, Thema 3, Aufgabe 4) Bestimmen Sie die euklidische Normalform der Quadrik Q, gegeben
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (SS 204): Lineare Algebra und analytische Geometrie 8 8. (Herbst 202, Thema 3, Aufgabe 4) Bestimmen Sie die euklidische Normalform der Quadrik Q, gegeben
Lösbarkeit linearer Gleichungssysteme
 Lösbarkeit linearer Gleichungssysteme Lineares Gleichungssystem: Ax b, A R m n, x R n, b R m L R m R n Lx Ax Bemerkung b 0 R m Das Gleichungssystem heißt homogen a A0 0 Das LGS ist stets lösbar b Wenn
Lösbarkeit linearer Gleichungssysteme Lineares Gleichungssystem: Ax b, A R m n, x R n, b R m L R m R n Lx Ax Bemerkung b 0 R m Das Gleichungssystem heißt homogen a A0 0 Das LGS ist stets lösbar b Wenn
Computergrafik 1 Beleuchtung
 Computergrafik 1 Beleuchtung Kai Köchy Sommersemester 2010 Beuth Hochschule für Technik Berlin Überblick Lokale Beleuchtungsmodelle Ambiente Beleuchtung Diffuse Beleuchtung (Lambert) Spiegelnde Beleuchtung
Computergrafik 1 Beleuchtung Kai Köchy Sommersemester 2010 Beuth Hochschule für Technik Berlin Überblick Lokale Beleuchtungsmodelle Ambiente Beleuchtung Diffuse Beleuchtung (Lambert) Spiegelnde Beleuchtung
Teil 7: Beleuchtung Beleuchtungsmodelle, Schattierungsmodelle
 Beleuchtungsmodelle, Schattierungsmodelle Einleitung Beleuchtung vs. Schattierung Beleuchtung: Modell auswerten (anschl.) global vs. lokal phsikalisch (photo-realistisch?) vs. empirisch Phong-Modell Schattierung:
Beleuchtungsmodelle, Schattierungsmodelle Einleitung Beleuchtung vs. Schattierung Beleuchtung: Modell auswerten (anschl.) global vs. lokal phsikalisch (photo-realistisch?) vs. empirisch Phong-Modell Schattierung:
(7) Normal Mapping. Vorlesung Computergraphik II S. Müller. Dank an Stefan Rilling U N I V E R S I T Ä T KOBLENZ LANDAU
 Normal Mapping. Vorlesung Computergraphik II S. Müller. Dank an Stefan Rilling U N I V E R S I T Ä T KOBLENZ LANDAU") (7) Normal Mapping Vorlesung Computergraphik II S. Müller Dank an Stefan Rilling Einleitung Die Welt ist voller Details Viele Details treten in Form von Oberflächendetails auf S. Müller - 3 - Darstellung
(7) Normal Mapping Vorlesung Computergraphik II S. Müller Dank an Stefan Rilling Einleitung Die Welt ist voller Details Viele Details treten in Form von Oberflächendetails auf S. Müller - 3 - Darstellung
1.3 Berechnen Sie die Koordinaten der Wendepunkte des Schaubildes der Funktion f mit f( x) x 6x 13
 x 6x 13") Pflichtteil Aufgabe BEISPIEL A. Geben Sie Lage und Art der Nullstellen der Funktion f mit 4 f( x) ( x ) ( x ) ; x IR an.. Bestimmen Sie die Gleichung der Tangente in P( f ()) an das Schaubild der Funktion
Pflichtteil Aufgabe BEISPIEL A. Geben Sie Lage und Art der Nullstellen der Funktion f mit 4 f( x) ( x ) ( x ) ; x IR an.. Bestimmen Sie die Gleichung der Tangente in P( f ()) an das Schaubild der Funktion
Seminar 3-D Grafik Mathematische Grundlagen, Räume, Koordinatensysteme, Projektionen. Hermann Schwarz Marko Pilop
 Seminar 3-D Grafik Mathematische Grundlagen, Räume, Koordinatensysteme, Projektionen Hermann Schwarz Marko Pilop 2003-11-20 http://www.informatik.hu-berlin.de/~pilop/3d_basics.pdf {hschwarz pilop}@informatik.hu-berlin.de
Seminar 3-D Grafik Mathematische Grundlagen, Räume, Koordinatensysteme, Projektionen Hermann Schwarz Marko Pilop 2003-11-20 http://www.informatik.hu-berlin.de/~pilop/3d_basics.pdf {hschwarz pilop}@informatik.hu-berlin.de
Mathematische Grundlagen
 Kapitel 2 Mathematische Grundlagen In diesem Kapitel werden die mathematischen Grundlagen dargelegt, die für die Darstellung von dreidimensionalen Objekten notwendig sind. 2. 3D-Koordinatensystem Weit
Kapitel 2 Mathematische Grundlagen In diesem Kapitel werden die mathematischen Grundlagen dargelegt, die für die Darstellung von dreidimensionalen Objekten notwendig sind. 2. 3D-Koordinatensystem Weit
Affine Koordinatentransformationen
 Affine Koordinatentransformationen Medieninformatik IL Andreas Unterweger Vertiefung Medieninformatik Studiengang ITS FH Salzburg Wintersemester 017/18 Andreas Unterweger (FH Salzburg) Affine Koordinatentransformationen
Affine Koordinatentransformationen Medieninformatik IL Andreas Unterweger Vertiefung Medieninformatik Studiengang ITS FH Salzburg Wintersemester 017/18 Andreas Unterweger (FH Salzburg) Affine Koordinatentransformationen
Fit in Mathe. Musterlösung. September Klassenstufe 10 Kongruenzabbildungen
 Thema Kongruenzabbildungen Wie sieht das nächste Bild aus?? Die szahl ist natürlich 5, denn die rechte Hälfte obiger symmetrischer Figuren sind die Zahlen von 1 bis 4, danach folgt 5, also das Buchstabenpaar
Thema Kongruenzabbildungen Wie sieht das nächste Bild aus?? Die szahl ist natürlich 5, denn die rechte Hälfte obiger symmetrischer Figuren sind die Zahlen von 1 bis 4, danach folgt 5, also das Buchstabenpaar
Transformation Allgemeines Die Lage eines Punktes kann durch einen Ortsvektor (ausgehend vom Ursprung des Koordinatensystems
 Transformation - 1 1. Allgemeines 2. Zwei durch eine Translation verknüpfte gleichartige Basissysteme 3. Zwei durch eine Translation verknüpfte verschiedenartige Basissysteme (noch gleiche Orientierung)
Transformation - 1 1. Allgemeines 2. Zwei durch eine Translation verknüpfte gleichartige Basissysteme 3. Zwei durch eine Translation verknüpfte verschiedenartige Basissysteme (noch gleiche Orientierung)
Echtzeit Videoverarbeitung
 Erzeugung von 3D Darstellungen Herbert Thoma Seite 1 Gliederung 3D Transformationen Sichtbarkeit von 3D Objekten Beleuchtung Texturen Beispiele: SGI Infinite Reality 2, PC 3D Hardware Seite 2 3D Transformationen
Erzeugung von 3D Darstellungen Herbert Thoma Seite 1 Gliederung 3D Transformationen Sichtbarkeit von 3D Objekten Beleuchtung Texturen Beispiele: SGI Infinite Reality 2, PC 3D Hardware Seite 2 3D Transformationen
Aufgabenskript. Lineare Algebra
 Dr Udo Hagenbach FH Gießen-Friedberg Sommersemester Aufgabenskript zur Vorlesung Lineare Algebra 6 Vektoren Aufgabe 6 Gegeben sind die Vektoren a =, b =, c = Berechnen Sie die folgenden Vektoren und ihre
Dr Udo Hagenbach FH Gießen-Friedberg Sommersemester Aufgabenskript zur Vorlesung Lineare Algebra 6 Vektoren Aufgabe 6 Gegeben sind die Vektoren a =, b =, c = Berechnen Sie die folgenden Vektoren und ihre
Computergrafik 2010 Oliver Vornberger. Kapitel 18: Beleuchtung. Vorlesung vom
 Computergrafik 2010 Oliver Vornberger Kapitel 18: Beleuchtung Vorlesung vom 08.06.2010 1 Korrektur α Für den Winkel zwischen den normierten Vektoren und gilt: ~v ~w A B C D sin(α) = ~v ~w 0,0 % sin(α)
Computergrafik 2010 Oliver Vornberger Kapitel 18: Beleuchtung Vorlesung vom 08.06.2010 1 Korrektur α Für den Winkel zwischen den normierten Vektoren und gilt: ~v ~w A B C D sin(α) = ~v ~w 0,0 % sin(α)
Aufgabenskript. Lineare Algebra
 Dr Udo Hagenbach FH Gießen-Friedberg Sommersemester 9 Aufgabenskript zur Vorlesung Lineare Algebra 6 Vektoren Aufgabe 6 Gegeben sind die Vektoren a =, b =, c = Berechnen Sie die folgenden Vektoren und
Dr Udo Hagenbach FH Gießen-Friedberg Sommersemester 9 Aufgabenskript zur Vorlesung Lineare Algebra 6 Vektoren Aufgabe 6 Gegeben sind die Vektoren a =, b =, c = Berechnen Sie die folgenden Vektoren und
Blatt 06.3: Matrizen
 Fakultät für Physik R: Rechenmethoden für Physiker, WiSe 204/5 Dozent: Jan von Delft Übungen: Benedikt Bruognolo, Katharina Stadler http://homepages.physik.uni-muenchen.de/~vondelft/lehre/4t0/ Blatt 06.3:
Fakultät für Physik R: Rechenmethoden für Physiker, WiSe 204/5 Dozent: Jan von Delft Übungen: Benedikt Bruognolo, Katharina Stadler http://homepages.physik.uni-muenchen.de/~vondelft/lehre/4t0/ Blatt 06.3:
Aufgabenskript. Lineare Algebra
 Dr Udo Hagenbach FH Gießen-Friedberg Sommersemester Aufgabenskript zur Vorlesung Lineare Algebra 7 Vektoren Aufgabe 7 Gegeben sind die Vektoren a =, b =, c = Berechnen Sie die folgenden Vektoren und ihre
Dr Udo Hagenbach FH Gießen-Friedberg Sommersemester Aufgabenskript zur Vorlesung Lineare Algebra 7 Vektoren Aufgabe 7 Gegeben sind die Vektoren a =, b =, c = Berechnen Sie die folgenden Vektoren und ihre
Beleuchtung Schattierung Rasterung
 Beleuchtung Schattierung Rasterung Thomas Jung t.jung@htw-berlin.de Beleuchtung, Schattierung und Rasterung in allen Echtzeit-3D-Umgebungen gleich OpenGL Direct3D 3dsmax,... Letzter Bestandteil der Grafikpipeline
Beleuchtung Schattierung Rasterung Thomas Jung t.jung@htw-berlin.de Beleuchtung, Schattierung und Rasterung in allen Echtzeit-3D-Umgebungen gleich OpenGL Direct3D 3dsmax,... Letzter Bestandteil der Grafikpipeline
Aufgaben zum Wochenende (1)
") Aufgaben zum Wochenende (1) 1. Schreiben Sie das Polynom (x 1) 5 geordnet nach Potenzen von x auf. (Binomialkoeffizienten!). Welche Bedingung müssen a, b, c erfüllen, damit die Lösungsmenge der Bestimmungsgleichung
Aufgaben zum Wochenende (1) 1. Schreiben Sie das Polynom (x 1) 5 geordnet nach Potenzen von x auf. (Binomialkoeffizienten!). Welche Bedingung müssen a, b, c erfüllen, damit die Lösungsmenge der Bestimmungsgleichung
Ermitteln Sie die Koordinaten des Schnittpunktes dieser beiden Geraden und erklären Sie Ihre Vorgehensweise!
 Aufgabe 2 Lagebeziehungen von Geraden im Raum Gegeben sind zwei Geraden g und h in 3. =( 3 Die Gerade g ist durch eine Parameterdarstellung X 4 2 Die Gerade h verläuft durch die Punkte A = (0 8 0 und B
Aufgabe 2 Lagebeziehungen von Geraden im Raum Gegeben sind zwei Geraden g und h in 3. =( 3 Die Gerade g ist durch eine Parameterdarstellung X 4 2 Die Gerade h verläuft durch die Punkte A = (0 8 0 und B
Lösungsvorschlag zum zweiten Übungsblatt
 Lösungsvorschlag zum zweiten Übungsblatt Aufgabe Wir zeigen, daß die Drehung um den Ursprung um 9 und die Spiegelung an der x-achse nicht kommutieren. Die Matrix für die Drehmatrix lautet in diesem Fall
Lösungsvorschlag zum zweiten Übungsblatt Aufgabe Wir zeigen, daß die Drehung um den Ursprung um 9 und die Spiegelung an der x-achse nicht kommutieren. Die Matrix für die Drehmatrix lautet in diesem Fall
Universität Trier. Fachbereich IV. Wintersemester 2004/2005. Wavelets made easy. Kapitel 2 Mehrdimensionale Wavelets und Anwendungen
 Universität Trier Fachbereich IV Wintersemester 2004/2005 Wavelets made easy Kapitel 2 Mehrdimensionale Wavelets und Anwendungen Thomas Queckbörner 16.11.2004 Übersicht des Kapitels: 1. Einführung 2. Zweidimensionale
Universität Trier Fachbereich IV Wintersemester 2004/2005 Wavelets made easy Kapitel 2 Mehrdimensionale Wavelets und Anwendungen Thomas Queckbörner 16.11.2004 Übersicht des Kapitels: 1. Einführung 2. Zweidimensionale
Kapitel 2: Mathematische Grundlagen
 [ Computeranimation ] Kapitel 2: Mathematische Grundlagen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 2. Mathematische Grundlagen
[ Computeranimation ] Kapitel 2: Mathematische Grundlagen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 2. Mathematische Grundlagen
JavaFX Koordinaten und Transformationen
 JavaFX Koordinaten und Transformationen Koordinaten Jedes Node-Objekt hat sein eigenes Koordinatensystem. In Container-Nodes beziehen sich Position und Größe der Kinder immer auf das Koordinatensystem
JavaFX Koordinaten und Transformationen Koordinaten Jedes Node-Objekt hat sein eigenes Koordinatensystem. In Container-Nodes beziehen sich Position und Größe der Kinder immer auf das Koordinatensystem
Projektion. Ebene geometrische Projektionen
 Projektion - 1 - Ebene geometrische Projektionen Die ebenen geometrischen Projektionen sind dadurch charakterisiert, daß mit Projektionsstrahlen konstanter Richtung, d.h. entlang von Geraden, auf Ebenen
Projektion - 1 - Ebene geometrische Projektionen Die ebenen geometrischen Projektionen sind dadurch charakterisiert, daß mit Projektionsstrahlen konstanter Richtung, d.h. entlang von Geraden, auf Ebenen
Übungsaufgaben für Mathematisches Denken
 Übungsaufgaben für Mathematisches Denken Bemerkung: Vektoren werden in diesem Übungszettel fett mit Kleinbuchstaben geschrieben und Matrizen werden fett mit Groÿbuchstaben geschrieben. Übung : Gegeben
Übungsaufgaben für Mathematisches Denken Bemerkung: Vektoren werden in diesem Übungszettel fett mit Kleinbuchstaben geschrieben und Matrizen werden fett mit Groÿbuchstaben geschrieben. Übung : Gegeben
Mathematische Grundlagen
 Mathematische Grundlagen Oliver Deussen Mathematische Grundlagen 1 Affine Räume um Zeichenebene bzw. Raum zu beschreiben, muß vorher ein Koordinatensystem festgelegt werden durch geometrische Fragestellungen
Mathematische Grundlagen Oliver Deussen Mathematische Grundlagen 1 Affine Räume um Zeichenebene bzw. Raum zu beschreiben, muß vorher ein Koordinatensystem festgelegt werden durch geometrische Fragestellungen
Kreis - Tangente. 2. Vorbemerkung: Satz des Thales Eine Möglichkeit zur Bestimmung der Tangente benutzt den Satz des Thales.
 Kreis - Tangente 1. Allgemeines 2. Satz des Thales 3. Tangente an einem Punkt auf dem Kreis 4. Tangente über Analysis (an einem Punkt eines Ursprungkreises) 5. Tangente von einem Punkt (Pol) an den Kreis
Kreis - Tangente 1. Allgemeines 2. Satz des Thales 3. Tangente an einem Punkt auf dem Kreis 4. Tangente über Analysis (an einem Punkt eines Ursprungkreises) 5. Tangente von einem Punkt (Pol) an den Kreis
VEKTOREN. Allgemeines. Vektoren in der Ebene (2D)
") VEKTOREN Allgemeines Man unterscheidet im Schulgebrauch zwischen zweidimensionalen und dreidimensionalen Vektoren (es kann aber auch Vektoren geben, die mehr als 3 Komponenten haben). Während zweidimensionale
VEKTOREN Allgemeines Man unterscheidet im Schulgebrauch zwischen zweidimensionalen und dreidimensionalen Vektoren (es kann aber auch Vektoren geben, die mehr als 3 Komponenten haben). Während zweidimensionale
Computergrafik Sommersemester 2004 Übungen
 Sommersemester 4 Freiwillige Zusatzübung Aufgabe 6: Transformationen im zweidimensionalen aum Berechnen Sie die Transformationsmatri, die eine Szene zuerst um 3 Grad um den Ursprung dreht und anschließend
Sommersemester 4 Freiwillige Zusatzübung Aufgabe 6: Transformationen im zweidimensionalen aum Berechnen Sie die Transformationsmatri, die eine Szene zuerst um 3 Grad um den Ursprung dreht und anschließend
4.4 Glättung von Kanten
 4.4 Glättung von Kanten Es wurden verschiedene Aspekte zur Beleuchtung von Modellen und Szenen vorgestellt. Es gibt zwei Arten von Licht, das Hintergrundlicht und Licht von Lichtquellen, wobei hier zu
4.4 Glättung von Kanten Es wurden verschiedene Aspekte zur Beleuchtung von Modellen und Szenen vorgestellt. Es gibt zwei Arten von Licht, das Hintergrundlicht und Licht von Lichtquellen, wobei hier zu
Kapitel 3: Geometrische Transformationen
 [ Computeranimation ] Kapitel 3: Geometrische Transformationen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 3. Geometrische Transformationen
[ Computeranimation ] Kapitel 3: Geometrische Transformationen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 3. Geometrische Transformationen
Repetitorium A: Matrizen, Reihenentwicklungen
 Fakultät für Physik R: Rechenmethoden für Physiker, WiSe 5/6 Dozent: Jan von Delft Übungen: Benedikt Bruognolo, Dennis Schimmel, Frauke Schwarz, Lukas Weidinger http://homepages.physik.uni-muenchen.de/~vondelft/lehre/5r/
Fakultät für Physik R: Rechenmethoden für Physiker, WiSe 5/6 Dozent: Jan von Delft Übungen: Benedikt Bruognolo, Dennis Schimmel, Frauke Schwarz, Lukas Weidinger http://homepages.physik.uni-muenchen.de/~vondelft/lehre/5r/
Grundlagen der Computergraphik Klausur SS08
 Grundlagen der Computergraphik Klausur SS08 Prof. Dr. Holger Theisel 23. Juli 2008 Vorname: Nachname: Matrikelnummer: Anzahl zusätzlicher Blätter: Die Tabelle wird bei der Korrektur ausgefüllt! Aufgabe
Grundlagen der Computergraphik Klausur SS08 Prof. Dr. Holger Theisel 23. Juli 2008 Vorname: Nachname: Matrikelnummer: Anzahl zusätzlicher Blätter: Die Tabelle wird bei der Korrektur ausgefüllt! Aufgabe
Die Festlegung der Koordinatensysteme gemäß Denavit-Hartenberg-Konventionen
 1 Die Festlegung der Koordinatensysteme gemäß Denavit-Hartenberg-Konventionen 1. Nummerierung die Armteile Der festgeschraubte Fuß ist Armteil 0, das erste drehbare Armteil ist Armteil 1 usw. Das letzte
1 Die Festlegung der Koordinatensysteme gemäß Denavit-Hartenberg-Konventionen 1. Nummerierung die Armteile Der festgeschraubte Fuß ist Armteil 0, das erste drehbare Armteil ist Armteil 1 usw. Das letzte
Übung (5) 2x 2y +2u 3v =1 3x 2u + v =0 2x +3y u +2v =0
 2x 2y +2u 3v =1 3x 2u + v =0 2x +3y u +2v =0") Übung (5) 1. Lösen Sie folgendes lineare Gleichungssystem - sagen Sie zuvor, wie die Lösungsmenge aussehen sollte bzw. geometrisch zu interpretieren wäre: x y +u v =1 x u + v =0 x +y u +v =0. Sagen Sie
Übung (5) 1. Lösen Sie folgendes lineare Gleichungssystem - sagen Sie zuvor, wie die Lösungsmenge aussehen sollte bzw. geometrisch zu interpretieren wäre: x y +u v =1 x u + v =0 x +y u +v =0. Sagen Sie
Höhere Mathematik I. Variante A
 Lehrstuhl II für Mathematik Prof. Dr. E. Triesch Höhere Mathematik I WiSe / Variante A Zugelassene Hilfsmittel: Als Hilfsmittel zugelassen sind handschriftliche Aufzeichnungen von maximal DinA4-Blättern.
Lehrstuhl II für Mathematik Prof. Dr. E. Triesch Höhere Mathematik I WiSe / Variante A Zugelassene Hilfsmittel: Als Hilfsmittel zugelassen sind handschriftliche Aufzeichnungen von maximal DinA4-Blättern.
Rendering. (illumination/shading) Beleuchtungsmodelle. Schattierung von Polygonen. Lokale Beleuchtungsmodelle
 Beleuchtungsmodelle. Schattierung von Polygonen. Lokale Beleuchtungsmodelle") Beleuchtung/Schattierung (illumination/shading) Beleuchtungsmodelle Globale Beleuchtungsmodelle Lokale Beleuchtungsmodelle Schattierung von Polygonen 1. Flat shading 2. Gouraud Shading 3. Phong Shading
Beleuchtung/Schattierung (illumination/shading) Beleuchtungsmodelle Globale Beleuchtungsmodelle Lokale Beleuchtungsmodelle Schattierung von Polygonen 1. Flat shading 2. Gouraud Shading 3. Phong Shading
(12) Wiederholung. Vorlesung Computergrafik T. Grosch
 Wiederholung. Vorlesung Computergrafik T. Grosch") (12) Wiederholung Vorlesung Computergrafik T. Grosch Klausur 18.7. 14 16 Uhr, Hörsaal 5 (Physik) 2 Zeitstunden 8 Aufgaben Drei Aufgabentypen Übungsaufgaben Wissensfragen zur Vorlesung Transferfragen Unterschiedlicher
(12) Wiederholung Vorlesung Computergrafik T. Grosch Klausur 18.7. 14 16 Uhr, Hörsaal 5 (Physik) 2 Zeitstunden 8 Aufgaben Drei Aufgabentypen Übungsaufgaben Wissensfragen zur Vorlesung Transferfragen Unterschiedlicher
Zusammenfassung Graphische Daten Verarbeitung By Fabian Flohrmann
 Zusammenfassung Graphische Daten Verarbeitung By Fabian Flohrmann VL02 Mechanische Maus: Ermittlung der Bewegung über 2 orth. angebrachte Bewegungssensoren (Lichtschranke) Optische Maus (mit Unterlage):
Zusammenfassung Graphische Daten Verarbeitung By Fabian Flohrmann VL02 Mechanische Maus: Ermittlung der Bewegung über 2 orth. angebrachte Bewegungssensoren (Lichtschranke) Optische Maus (mit Unterlage):
VU Einführung in Visual Computing 1. Test Gruppe A
 26.04.2013 186.822 VU Einführung in Visual Computing 1. Test Gruppe A Matrikelnummer: Nachname: Punkte: Studienkennzahl: Vorname: Bitte tragen sie Ihre Matrikelnummer, Studienkennzahl sowie Vor- und Nachname
26.04.2013 186.822 VU Einführung in Visual Computing 1. Test Gruppe A Matrikelnummer: Nachname: Punkte: Studienkennzahl: Vorname: Bitte tragen sie Ihre Matrikelnummer, Studienkennzahl sowie Vor- und Nachname
Computergrafik 2010 Oliver Vornberger. Kapitel 18: Beleuchtung
 Computergrafik 2010 Oliver Vornberger Kapitel 18: Beleuchtung 1 Ausgangslage am Ende der Viewing Pipeline liegt vor: P A Materialeigenschaften P B P C 2 Beleuchtungmodelle lokal: Objekt, Lichtquellen,
Computergrafik 2010 Oliver Vornberger Kapitel 18: Beleuchtung 1 Ausgangslage am Ende der Viewing Pipeline liegt vor: P A Materialeigenschaften P B P C 2 Beleuchtungmodelle lokal: Objekt, Lichtquellen,
Prüfungsdauer: 120 Minuten
 Computergraphik und Multimediasysteme Seite 1 von 6 Klausur: Computergraphik II Probeklausur Semester: Prüfer: Prüfungsdauer: 1 Minuten Hilfsmittel: Schreibgeräte, Lineal, nichtprogrammierbarer Taschenrechner
Computergraphik und Multimediasysteme Seite 1 von 6 Klausur: Computergraphik II Probeklausur Semester: Prüfer: Prüfungsdauer: 1 Minuten Hilfsmittel: Schreibgeräte, Lineal, nichtprogrammierbarer Taschenrechner
3 Koordinatentransformationen
 8 MATHEMATISCHE GRUNDLAGEN DER COMPUTERGEOMETRIE 3 Koordinatentransformationen Für die Darstellung von dreidimensionalen Objekten wird grundsätlich eine Reihe von Transformationen ausgeführt, die von den
8 MATHEMATISCHE GRUNDLAGEN DER COMPUTERGEOMETRIE 3 Koordinatentransformationen Für die Darstellung von dreidimensionalen Objekten wird grundsätlich eine Reihe von Transformationen ausgeführt, die von den
2D-Transformationen. Kapitel 6. 6.1 Translation. 6.2 Skalierung
 Kapitel 6 2D-Transformationen Mit Hilfe von Transformationen ist es möglich, die Position, die Orientierung, die Form und die Größe der grafischen Objekte zu manipulieren. Transformationen eines Objekts
Kapitel 6 2D-Transformationen Mit Hilfe von Transformationen ist es möglich, die Position, die Orientierung, die Form und die Größe der grafischen Objekte zu manipulieren. Transformationen eines Objekts
Arbeitsblätter zur Vergleichsklausur EF. Aufgabe 1 Bestimme die Lösungen der folgenden Gleichungen möglichst im Kopf.
 Arbeitsblätter zur Vergleichsklausur EF Arbeitsblatt I.1 Nullstellen Aufgabe 1 Bestimme die Lösungen der folgenden Gleichungen möglichst im Kopf. Beachte den Satz: Ein Produkt wird null, wenn einer der
Arbeitsblätter zur Vergleichsklausur EF Arbeitsblatt I.1 Nullstellen Aufgabe 1 Bestimme die Lösungen der folgenden Gleichungen möglichst im Kopf. Beachte den Satz: Ein Produkt wird null, wenn einer der
Computergrafik. Ein anwendungsorientiertes Lehrbuch. Bearbeitet von Michael Bender, Manfred Brill
 Computergrafik Ein anwendungsorientiertes Lehrbuch Bearbeitet von Michael Bender, Manfred Brill 1. Auflage 2003. Taschenbuch. 528 S. Paperback ISBN 978 3 446 22150 5 Format (B x L): 16,9 x 24,1 cm Gewicht:
Computergrafik Ein anwendungsorientiertes Lehrbuch Bearbeitet von Michael Bender, Manfred Brill 1. Auflage 2003. Taschenbuch. 528 S. Paperback ISBN 978 3 446 22150 5 Format (B x L): 16,9 x 24,1 cm Gewicht:
Übungsblatt
 Übungsblatt 3 3.5.27 ) Die folgenden vier Matrizen bilden eine Darstellung der Gruppe C 4 : E =, A =, B =, C = Zeigen Sie einige Gruppeneigenschaften: a) Abgeschlossenheit: Berechnen Sie alle möglichen
Übungsblatt 3 3.5.27 ) Die folgenden vier Matrizen bilden eine Darstellung der Gruppe C 4 : E =, A =, B =, C = Zeigen Sie einige Gruppeneigenschaften: a) Abgeschlossenheit: Berechnen Sie alle möglichen
Hauptachsentransformation: Eigenwerte und Eigenvektoren
 Hauptachsentransformation: Eigenwerte und Eigenvektoren die bisherigen Betrachtungen beziehen sich im Wesentlichen auf die Standardbasis des R n Nun soll aufgezeigt werden, wie man sich von dieser Einschränkung
Hauptachsentransformation: Eigenwerte und Eigenvektoren die bisherigen Betrachtungen beziehen sich im Wesentlichen auf die Standardbasis des R n Nun soll aufgezeigt werden, wie man sich von dieser Einschränkung
Testprüfung (Abitur 2013)
") Testprüfung (Abitur 2013) Steve Göring, stg7@gmx.de 3. April 2013 Bearbeitungszeit: Zugelassene Hilfsmittel: 270 Minuten Taschenrechner (nicht programmierbar, nicht grafikfähig), Tafelwerk Name: Punkte:
Testprüfung (Abitur 2013) Steve Göring, stg7@gmx.de 3. April 2013 Bearbeitungszeit: Zugelassene Hilfsmittel: 270 Minuten Taschenrechner (nicht programmierbar, nicht grafikfähig), Tafelwerk Name: Punkte:
Definition, Abbildungsmatrix, Spiegelung, Projektion
 Bau und Gestaltung, Mathematik 2, T. Borer Aufgaben 5-2/ Aufgaben 5 Lineare Abbildungen Definition, Abbildungsmatrix, Spiegelung, Projektion Lernziele - beurteilen können, ob eine gegebene Abbildung linear
Bau und Gestaltung, Mathematik 2, T. Borer Aufgaben 5-2/ Aufgaben 5 Lineare Abbildungen Definition, Abbildungsmatrix, Spiegelung, Projektion Lernziele - beurteilen können, ob eine gegebene Abbildung linear
Lineare Transformationen, Teil 1 Lösungen zu den Aufgaben. 1 E1 Ma 1 Lubov Vassilevskaya
 Lineare Transformationen, Teil 1 Lösungen zu den Aufgaben 1 E1 Lineare Transformationen: cc Aufgaben 1, 2 Aufgabe 1: Wenden Sie die Transformation T auf den Punkt P und auf den Vektor OP an. Beschreiben
Lineare Transformationen, Teil 1 Lösungen zu den Aufgaben 1 E1 Lineare Transformationen: cc Aufgaben 1, 2 Aufgabe 1: Wenden Sie die Transformation T auf den Punkt P und auf den Vektor OP an. Beschreiben
Übungen zu Computergrafik
 Institut für Informatik Universität Osnabrück, 3..6 Prof. Dr. Oliver Vornberger http://www-lehre.inf.uos.de/~cg Lukas Kalbertodt, B.Sc. Testat bis..6, 4: Uhr Übungen zu Computergrafik Sommersemester 6
Institut für Informatik Universität Osnabrück, 3..6 Prof. Dr. Oliver Vornberger http://www-lehre.inf.uos.de/~cg Lukas Kalbertodt, B.Sc. Testat bis..6, 4: Uhr Übungen zu Computergrafik Sommersemester 6
Bildverarbeitung: 3D-Geometrie. D. Schlesinger () Bildverarbeitung: 3D-Geometrie 1 / 13
 Bildverarbeitung: 3D-Geometrie 1 / 13") Bildverarbeitung: 3D-Geometrie D. Schlesinger () Bildverarbeitung: 3D-Geometrie 1 / 13 Lochkamera Modell C Projektionszentrum, Optische Achse, Bildebene, P Hauptpunkt (optische Achse kreuzt die Bildebene),
Bildverarbeitung: 3D-Geometrie D. Schlesinger () Bildverarbeitung: 3D-Geometrie 1 / 13 Lochkamera Modell C Projektionszentrum, Optische Achse, Bildebene, P Hauptpunkt (optische Achse kreuzt die Bildebene),
Lokale Beleuchtungsmodelle
 Lokale Beleuchtungsmodelle Proseminar GDV, SS 05 Alexander Gitter Betreuer: Dirk Staneker Wilhelm-Schickard-Institut für Informatik Graphisch-Interaktive Systeme Sand 14 D-72076 Tübingen Einleitung und
Lokale Beleuchtungsmodelle Proseminar GDV, SS 05 Alexander Gitter Betreuer: Dirk Staneker Wilhelm-Schickard-Institut für Informatik Graphisch-Interaktive Systeme Sand 14 D-72076 Tübingen Einleitung und
3.3. Drehungen und Spiegelungen
 3.3. Drehungen und Spiegelungen Drehungen und Spiegelungen in der Ebene Die Multiplikation einer komplexen Zahl z = x + i y (aufgefaßt als Punkt oder Ortsvektor der Ebene) mit der Zahl w = e ( ) = i φ
3.3. Drehungen und Spiegelungen Drehungen und Spiegelungen in der Ebene Die Multiplikation einer komplexen Zahl z = x + i y (aufgefaßt als Punkt oder Ortsvektor der Ebene) mit der Zahl w = e ( ) = i φ
Nachholtutorium A: Matrizen, Reihenentwicklungen Aufgaben
 Fakultät für Physik Jan von Delft, Olga Goulko, Florian Bauer T: Rechenmethoden für Physiker, WiSe /3 http://homepages.physik.uni-muenchen.de/~vondelft/lehre/t/ Nachholtutorium A: Matrizen, Reihenentwicklungen
Fakultät für Physik Jan von Delft, Olga Goulko, Florian Bauer T: Rechenmethoden für Physiker, WiSe /3 http://homepages.physik.uni-muenchen.de/~vondelft/lehre/t/ Nachholtutorium A: Matrizen, Reihenentwicklungen
Matrizen. Jörn Loviscach. Versionsstand: 12. April 2010, 19:00 Die nummerierten Felder sind absichtlich leer, zum Ausfüllen in der Vorlesung.
 Matrizen Jörn Loviscach Versionsstand: 12. April 2010, 19:00 Die nummerierten Felder sind absichtlich leer, zum Ausfüllen in der Vorlesung. 1 Matrix Ein rechteckige Anordnung von mathematischen Objekten
Matrizen Jörn Loviscach Versionsstand: 12. April 2010, 19:00 Die nummerierten Felder sind absichtlich leer, zum Ausfüllen in der Vorlesung. 1 Matrix Ein rechteckige Anordnung von mathematischen Objekten
1 Transformationen. 1.1 Transformationsmatrizen. Seite 1
 Seite 1 1 Transformationen 1.1 Transformationsmatrizen In den folgenden Teilaufgaben sind die Koeffizienten von 4 4 Transformationsmatrizen zur Repräsentation von affinen Abbildungen im R 3 zu bestimmen.
Seite 1 1 Transformationen 1.1 Transformationsmatrizen In den folgenden Teilaufgaben sind die Koeffizienten von 4 4 Transformationsmatrizen zur Repräsentation von affinen Abbildungen im R 3 zu bestimmen.
ABITURPRÜFUNG 2001 GRUNDFACH MATHEMATIK
 ABITURPRÜFUNG 2001 GRUNDFACH MATHEMATIK (HAUPTTERMIN) Arbeitszeit: Hilfsmittel: 210 Minuten Taschenrechner (nicht programmierbar, nicht grafikfähig) Tafelwerk Der Prüfungsteilnehmer wählt von den Aufgaben
ABITURPRÜFUNG 2001 GRUNDFACH MATHEMATIK (HAUPTTERMIN) Arbeitszeit: Hilfsmittel: 210 Minuten Taschenrechner (nicht programmierbar, nicht grafikfähig) Tafelwerk Der Prüfungsteilnehmer wählt von den Aufgaben
3.6 Einführung in die Vektorrechnung
 3.6 Einführung in die Vektorrechnung Inhaltsverzeichnis Definition des Vektors 2 2 Skalare Multiplikation und Kehrvektor 4 3 Addition und Subtraktion von Vektoren 5 3. Addition von zwei Vektoren..................................
3.6 Einführung in die Vektorrechnung Inhaltsverzeichnis Definition des Vektors 2 2 Skalare Multiplikation und Kehrvektor 4 3 Addition und Subtraktion von Vektoren 5 3. Addition von zwei Vektoren..................................
Computergraphik I. Freiformkurven. aus: Farin Curven und Flächen im CAGD. Oliver Deussen Freiformkurven 1
 Freiformkurven aus: Farin Curven und Flächen im CAGD Oliver Deussen Freiformkurven 1 Definition für gebogene Kurven und Flächen Anwendungen: CAD: Automobil-, Flugzeug-, Schiffsbau Computergraphik: Objektmodellierung
Freiformkurven aus: Farin Curven und Flächen im CAGD Oliver Deussen Freiformkurven 1 Definition für gebogene Kurven und Flächen Anwendungen: CAD: Automobil-, Flugzeug-, Schiffsbau Computergraphik: Objektmodellierung
Transformationen im 3D-Raum
 Thomas Jung Repräsentation von 3D-Oberflächen Aufbau von Szenen Transformationen im 3D-Raum Projektionstranformationen Anwendung in OpenGL Geometrietransformationen bilden die Basis für die Computergrafik
Thomas Jung Repräsentation von 3D-Oberflächen Aufbau von Szenen Transformationen im 3D-Raum Projektionstranformationen Anwendung in OpenGL Geometrietransformationen bilden die Basis für die Computergrafik
++ + = 0 so erhält man eine quadratische Gleichung mit zwei Variablen dx+ey+f = 0 1.1
 Hauptachsentransformation. Einleitung Schneidet man den geraden Kreiskegel mit der Gleichung = + und die Ebene ++ + = 0 so erhält man eine quadratische Gleichung mit zwei Variablen +2 + +dx+ey+f = 0. Die
Hauptachsentransformation. Einleitung Schneidet man den geraden Kreiskegel mit der Gleichung = + und die Ebene ++ + = 0 so erhält man eine quadratische Gleichung mit zwei Variablen +2 + +dx+ey+f = 0. Die
3D-Transformationen. Kapitel Translation Skalierung
 Kapitel 3 3D-Transformationen Wie im weidimensionalen Fall, werden die Definitionspunkte der Objekte als Spaltenvektoren mit homogener Koordinate geschrieben. Die notwendigen Transformationen werden wieder
Kapitel 3 3D-Transformationen Wie im weidimensionalen Fall, werden die Definitionspunkte der Objekte als Spaltenvektoren mit homogener Koordinate geschrieben. Die notwendigen Transformationen werden wieder
. Ihr Schaubild sei &. a) Geben Sie die Asymptoten von & an. b) Bestimmen Sie den Schnittpunkt der Tangente an & im Punkt 1 1 mit der Achse.
 Geben Sie die Asymptoten von & an. b) Bestimmen Sie den Schnittpunkt der Tangente an & im Punkt 1 1 mit der Achse.") Aufgabe A4/04 Gegeben ist die Funktion mit 2; 0. Das Schaubild von hat im Punkt 1 die Tangente. Ermitteln Sie eine Gleichung von. Die Tangente schneidet die Achse im Punkt. Bestimmen Sie die Koordinaten
Aufgabe A4/04 Gegeben ist die Funktion mit 2; 0. Das Schaubild von hat im Punkt 1 die Tangente. Ermitteln Sie eine Gleichung von. Die Tangente schneidet die Achse im Punkt. Bestimmen Sie die Koordinaten
Matrizen. Jörn Loviscach
 Matrizen Jörn Loviscach Versionsstand: 7. April 2010, 14:27 Die nummerierten Felder sind absichtlich leer, zum Ausfüllen in der Vorlesung. Videos dazu: http://www.youtube.com/joernloviscach 1 Matrix Ein
Matrizen Jörn Loviscach Versionsstand: 7. April 2010, 14:27 Die nummerierten Felder sind absichtlich leer, zum Ausfüllen in der Vorlesung. Videos dazu: http://www.youtube.com/joernloviscach 1 Matrix Ein
Analysis 5.
 Analysis 5 www.schulmathe.npage.de Aufgaben Gegeben ist die Funktion f durch f(x) = 2 e 2 x 2 (x D f ) a) Geben Sie den größtmöglichen Definitionsbereich der Funktion f an und führen Sie für die Funktion
Analysis 5 www.schulmathe.npage.de Aufgaben Gegeben ist die Funktion f durch f(x) = 2 e 2 x 2 (x D f ) a) Geben Sie den größtmöglichen Definitionsbereich der Funktion f an und führen Sie für die Funktion
Matrizen. Jörn Loviscach. Versionsstand: 14. April 2009, 00:25
 Matrizen Jörn Loviscach Versionsstand: 14. April 2009, 00:25 1 Matrix Ein rechteckige Anordnung von mathematischen Objekten (typischerweise Zahlen) heißt Matrix (Mehrzahl: Matrizen) [matrix, matrices].
Matrizen Jörn Loviscach Versionsstand: 14. April 2009, 00:25 1 Matrix Ein rechteckige Anordnung von mathematischen Objekten (typischerweise Zahlen) heißt Matrix (Mehrzahl: Matrizen) [matrix, matrices].
Lineare Funktionen Arbeitsblatt 1
 Lineare Funktionen Arbeitsblatt 1 Eine Funktion mit der Gleichung y = m x + b heißt lineare Funktion. Ihr Graph ist eine Gerade mit der Steigung m. Die Gerade schneidet die y-achse im Punkt P(0 b). Man
Lineare Funktionen Arbeitsblatt 1 Eine Funktion mit der Gleichung y = m x + b heißt lineare Funktion. Ihr Graph ist eine Gerade mit der Steigung m. Die Gerade schneidet die y-achse im Punkt P(0 b). Man
4 Grundlagen zu SVG-Karten und -Diagrammen...33
 48 4 Grundlagen zu SVG-Karten und -Diagrammen 4 Grundlagen zu SVG-Karten und -Diagrammen...33 4.1 Bildschirmdarstellung vs. Papierkartendruck...33 4.1.1 Mehr Farben...33 4.1.2 Probleme beim Einsatz von
48 4 Grundlagen zu SVG-Karten und -Diagrammen 4 Grundlagen zu SVG-Karten und -Diagrammen...33 4.1 Bildschirmdarstellung vs. Papierkartendruck...33 4.1.1 Mehr Farben...33 4.1.2 Probleme beim Einsatz von
Erinnerung. Arbeitsschritte der Computergraphik. Modellierung. Animation. Rendering. Ausgabemedium. Generierung
 Erinnerung Arbeitsschritte der Computergraphik Modellierung Animation Generierung Ausgabemedium Graphik/-Pipeline Wandelt die Beschreibung einer Szene im dreidimensionalen Raum in eine zweidimensionale
Erinnerung Arbeitsschritte der Computergraphik Modellierung Animation Generierung Ausgabemedium Graphik/-Pipeline Wandelt die Beschreibung einer Szene im dreidimensionalen Raum in eine zweidimensionale
09. Lineare Abbildungen und Koordinatentransformationen
 09. Lineare Abbildungen und Koordinatentransformationen Definition. Seien V und W Vektorräume. Unter einer linearen Abbildung versteht man eine Abbildung F : V W, v F v w mit folgender Eigenschaft: F λ
09. Lineare Abbildungen und Koordinatentransformationen Definition. Seien V und W Vektorräume. Unter einer linearen Abbildung versteht man eine Abbildung F : V W, v F v w mit folgender Eigenschaft: F λ
4. Übungsblatt zur Mathematik II für BI, MaWi, WI(BI), AngGeo
, AngGeo") Fachbereich Mathematik Prof. J. Lehn Hasan Gündoğan, Nicole Nowak Sommersemester 8 4./5./8. April 4. Übungsblatt zur Mathematik II für BI, MaWi, WI(BI, AngGeo Gruppenübung Aufgabe G9 (Multiple Choice Bei
Fachbereich Mathematik Prof. J. Lehn Hasan Gündoğan, Nicole Nowak Sommersemester 8 4./5./8. April 4. Übungsblatt zur Mathematik II für BI, MaWi, WI(BI, AngGeo Gruppenübung Aufgabe G9 (Multiple Choice Bei
Hauptprüfung Abiturprüfung 2015 (ohne CAS) Baden-Württemberg
 Baden-Württemberg") Baden-Württemberg: Abitur 01 Pflichtteil www.mathe-aufgaben.com Hauptprüfung Abiturprüfung 01 (ohne CAS) Baden-Württemberg Pflichtteil Hilfsmittel: keine allgemeinbildende Gymnasien Alexander Schwarz www.mathe-aufgaben.com
Baden-Württemberg: Abitur 01 Pflichtteil www.mathe-aufgaben.com Hauptprüfung Abiturprüfung 01 (ohne CAS) Baden-Württemberg Pflichtteil Hilfsmittel: keine allgemeinbildende Gymnasien Alexander Schwarz www.mathe-aufgaben.com
Name: Musterlösung Seite 2
 Name: Musterlösung Seite 2 Beantworten Sie die Fragen in Aufgabe 1 mit einer kurzen, prägnanten Antwort. Die Fragen zu OpenGL beziehen sich auf die in der Vorlesung vorgestellte OpenGL Version 3.1 (core)
Name: Musterlösung Seite 2 Beantworten Sie die Fragen in Aufgabe 1 mit einer kurzen, prägnanten Antwort. Die Fragen zu OpenGL beziehen sich auf die in der Vorlesung vorgestellte OpenGL Version 3.1 (core)
Übung (5) 4x 2y +2u 3v =1 3x 2u + v =0 2x +3y u +2v =0
 4x 2y +2u 3v =1 3x 2u + v =0 2x +3y u +2v =0") Übung (5). Lösen Sie folgendes lineare Gleichungssystem - sagen Sie zuvor, wie die Lösungsmenge aussehen sollte bzw. geometrisch zu interpretieren wäre: 4x y +u 3v = 3x u + v =0 x +3y u +v =0. Sagen Sie
Übung (5). Lösen Sie folgendes lineare Gleichungssystem - sagen Sie zuvor, wie die Lösungsmenge aussehen sollte bzw. geometrisch zu interpretieren wäre: 4x y +u 3v = 3x u + v =0 x +3y u +v =0. Sagen Sie
Fakultät für Physik Jan von Delft, Katharina Stadler, Frauke Schwarz T0: Rechenmethoden für Physiker, WiSe 2013/14.
 Fakultät für Physik Jan von Delft, Katharina Stadler, Frauke Schwarz T0: Rechenmethoden für Physiker, WiSe 01/14 http://homepages.physik.uni-muenchen.de/~vondelft/lehre/1t0/ T0: Probeklausur Donnerstag,
Fakultät für Physik Jan von Delft, Katharina Stadler, Frauke Schwarz T0: Rechenmethoden für Physiker, WiSe 01/14 http://homepages.physik.uni-muenchen.de/~vondelft/lehre/1t0/ T0: Probeklausur Donnerstag,
9. Parametrische Kurven und Flächen
 9. Parametrische Kurven und Flächen Polylinien bzw. Polygone sind stückweise lineare Approximationen für Kurven bzw. Flächen Nachteile: hohe Zahl von Eckpunkten für genaue Repräsentation erforderlich interaktive
9. Parametrische Kurven und Flächen Polylinien bzw. Polygone sind stückweise lineare Approximationen für Kurven bzw. Flächen Nachteile: hohe Zahl von Eckpunkten für genaue Repräsentation erforderlich interaktive
7. Wie lautet die Inverse der Verkettung zweier linearer Abbildungen? 9. Wie kann die Matrixdarstellung einer linearen Abbildung aufgestellt werden?
 Kapitel Lineare Abbildungen Verständnisfragen Sachfragen Was ist eine lineare Abbildung? Erläutern Sie den Zusammenhang zwischen Unterräumen, linearer Unabhängigkeit und linearen Abbildungen! 3 Was ist
Kapitel Lineare Abbildungen Verständnisfragen Sachfragen Was ist eine lineare Abbildung? Erläutern Sie den Zusammenhang zwischen Unterräumen, linearer Unabhängigkeit und linearen Abbildungen! 3 Was ist
Arbeitsblätter Förderplan EF
 Arbeitsblätter Förderplan EF I.1 Nullstellen bestimmen Lösungen I.2 Parabeln: Nullstellen, Scheitelpunkte,Transformationen Lösungen I.3 Graphen und Funktionsterme zuordnen Lösungen II.1 Transformationen
Arbeitsblätter Förderplan EF I.1 Nullstellen bestimmen Lösungen I.2 Parabeln: Nullstellen, Scheitelpunkte,Transformationen Lösungen I.3 Graphen und Funktionsterme zuordnen Lösungen II.1 Transformationen
-dimensionale Darstellungen
 1.9 2 1 2 -dimensionale Darstellungen Auf einer Fläche F (2 dimensional) wird eine Operation ausgeführt Zum Beispiel wir eine Verschiebung um den Vektor t durchgeführt. Gemeint ist der Körper, der überstrichen
1.9 2 1 2 -dimensionale Darstellungen Auf einer Fläche F (2 dimensional) wird eine Operation ausgeführt Zum Beispiel wir eine Verschiebung um den Vektor t durchgeführt. Gemeint ist der Körper, der überstrichen
Analysis 7. f(x) = 4 x (x R)
 = 4 x (x R)") Analysis 7 www.schulmathe.npage.de Aufgaben Gegeben ist die Funktion f durch fx) = 4 x R) a) Führen Sie für die Funktion f eine Kurvendiskussion durch Nullstellen, Koordinaten der lokalen Extrempunkte,
Analysis 7 www.schulmathe.npage.de Aufgaben Gegeben ist die Funktion f durch fx) = 4 x R) a) Führen Sie für die Funktion f eine Kurvendiskussion durch Nullstellen, Koordinaten der lokalen Extrempunkte,
Vorbereitung für die Prüfung Mathematik II für Informatiker
 Technische Universität Ilmenau SS 2010 Institut für Mathematik Inf Prof. Dr. Michael Stiebitz Vorbereitung für die Prüfung Mathematik II für Informatiker 1 Lineare Algebra Aufgabe 1 Schauen Sie sich die
Technische Universität Ilmenau SS 2010 Institut für Mathematik Inf Prof. Dr. Michael Stiebitz Vorbereitung für die Prüfung Mathematik II für Informatiker 1 Lineare Algebra Aufgabe 1 Schauen Sie sich die
Mathematiklabor 2. Übungsblatt
 Dr. Jörg-M. Sautter 3.4.7 Mathematiklabor. Übungsblatt Aufgabe : (Wiederholung) Laden Sie die Dateien mlintro?.m herunter und gehen Sie diese Schritt für Schritt durch. Aufgabe : (Matrix- und Vektoroperationen,
Dr. Jörg-M. Sautter 3.4.7 Mathematiklabor. Übungsblatt Aufgabe : (Wiederholung) Laden Sie die Dateien mlintro?.m herunter und gehen Sie diese Schritt für Schritt durch. Aufgabe : (Matrix- und Vektoroperationen,
Einleitung 2. 1 Koordinatensysteme 2. 2 Lineare Abbildungen 4. 3 Literaturverzeichnis 7
 Sonja Hunscha - Koordinatensysteme 1 Inhalt Einleitung 2 1 Koordinatensysteme 2 1.1 Kartesisches Koordinatensystem 2 1.2 Polarkoordinaten 3 1.3 Zusammenhang zwischen kartesischen und Polarkoordinaten 3
Sonja Hunscha - Koordinatensysteme 1 Inhalt Einleitung 2 1 Koordinatensysteme 2 1.1 Kartesisches Koordinatensystem 2 1.2 Polarkoordinaten 3 1.3 Zusammenhang zwischen kartesischen und Polarkoordinaten 3