Allgemeine Kräftesysteme
|
|
|
- Jasper Hafner
- vor 5 Jahren
- Abrufe
Transkript
1 3 Allgemeine Kräftesysteme Allgemeine Kräftesysteme

2 Allgemeine Kräftesysteme Was ist neu? Zwei Kräfte, die nicht an einem zentralen Punkt angreifen Ist das System im Gleichgewicht? A ja B ja, horizontal C ja, vertikal D nein vote at Allgemeine Kräftesysteme 1

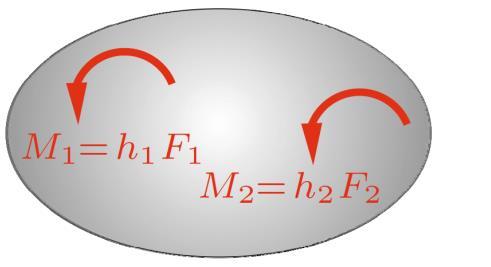
 Moment Betrag des Momentes = senkrechter Abstand (h) X Betrag der")
![Kraft (F) Einheit des Momentes: Newton-Meter [Nm] Actio = reactio zu](/docs-images/96/129748029/images/3-2.jpg "jedem Kräftepaar existiert gleichgroßes Kräftepaar mit")
3 wikipedia.org wikipedia.org Charakterisierung von Kräftepaaren Moment Wirkung von Kräftepaar: Drehung des Körpers Charakterisierung der Drehung : (a) Drehsinn und (b) Moment Betrag des Momentes = senkrechter Abstand (h) X Betrag der Kraft (F) Einheit des Momentes: Newton-Meter [Nm] Actio = reactio zu jedem Kräftepaar existiert gleichgroßes Kräftepaar mit entgegengesetzten Drehsinn Anwendungsbeispiele Allgemeine Kräftesysteme 2
 Resultierendes Kräftepaar 1. durch Verschiebung und Addition der Kräfte 2.")
4 Gross et al. 1 Charakterisierung von Kräftepaaren Moment Kräftepaar kann beliebig verschoben und rotiert werden (s. vorherige Folie) Resultierendes Kräftepaar 1. durch Verschiebung und Addition der Kräfte 2. durch Berechnung der Einzelmomente und Addition Allgemeine Kräftesysteme 3




5 Gleichgewichtsbedingung für Kräftepaare Resultierendes Moment Gleichgewichtsbedingung Anwendungsbeispiel: System Freikörperbild Aufteilung der Kräfte Allgemeine Kräftesysteme 4

![Das Drehmoment entspricht der zeitlichen Ableitung des Drehimpulses mit Einheit [Nm].](/docs-images/96/129748029/images/6-2.jpg "Beispiel: Es gehen nur aufeinander senkrechte Komponenten von Abstand und Kraft ein.")
6 Moment einer Einzelkraft Erinnerung Ein Drehmoment (kurz Moment) um einen Punkt A resultiert aus dem Kreuzprodukt von Richtungsvektor zwischen A und dem Kraftangriffspunkt sowie der Kraft selbst. Das Drehmoment entspricht der zeitlichen Ableitung des Drehimpulses mit Einheit [Nm]. Beispiel: Es gehen nur aufeinander senkrechte Komponenten von Abstand und Kraft ein. Das resultierende Moment dreht positiv entgegen dem Uhrzeigersinn um z. A Allgemeine Kräftesysteme 5

7 Gross et al. 1 Moment einer Einzelkraft Reduktion auf Kraft und Moment in/um einen Punkt Wiederholung: Für Starrkörper ändert Translation der Kraft entlang ihrer Wirkungslinie ihre Wirkung nicht Translation der Kraft orthogonal zur Wirkungslinie durch Addition einer Gleichgewichtsgruppe und Moment 1. Addition einer Gleichgewichtsgruppe im betrachteten Punkt 0 (Translation) 2. Kräftepaar durch Moment bzgl. Punktes 0 ersetzen Anmerkung: abhängig vom betrachteten Punkt (anders als Kräftepaar)! Allgemeine Kräftesysteme 6



8 Gross et al. 1 Resultierende ebener Kräftesysteme Reduktion des Kräftesystems bzgl. beliebigen Punktes A 1. Translation der Kräfte in Bezugspunkt (durch Addition von Kräftepaaren Momente) 2. Resultierende Kraft und resultierendes Moment berechnen Anmerkung: abhängig betrachteten Punkt A Allgemeine Kräftesysteme 7






9 Gross et al. 1 Gleichgewichtsbedingungen für ebene Kräftesysteme Gleichgewichtsbedingung: Resultierende Kraft und resultierendes Moment sind Null Anmerkung: Im Allgemeinen ist das Moment abhängig vom Bezugspunkt! Anmerkung: Gleichgewichtsbedingungen invariant bzgl. Bezugspunkt! Allgemeine Kräftesysteme 8
 muss das Gewicht angreifen, damit")
10 Gross et al. 1 Seite 65 Beispiel Freikörperbild Wo (Koordinate x) muss das Gewicht angreifen, damit Gleichgewicht vorliegt? 3 Gleichungen 3 Unbekannte Allgemeine Kräftesysteme 9
11 Beispiel Allgemeine Kräftesysteme 10
12 Beispiel Allgemeine Kräftesysteme 11
13 Gross et al. 1 Seite 65 Beispiel - Fortsetzung Anmerkung: Effizientes Vorgehen: Starte mit Gleichgewichtsbedingung, welche möglichst wenige (eine) Unbekannte enthält; z.b. Momentengleichgewicht für Schnittpunkt von Wirkungslinien Anmerkung: Grafoanalytische Verfahren oftmals effizient Anwendung auf Beispiel: Richtung der Wirkungslinien bekannt nicht parallel Momentengleichgewicht, falls gemeinsamer Schnittpunkt der Wirkungslinien Allgemeine Kräftesysteme 12


 Gleichgewichtsbedingungen zweckmäßiger (s.")
14 Gleichgewichtsbedingungen für räumliche Kräftesysteme Resultierende und resultierendes Moment Gleichgewichtsbedingungen oder in Koordinatenschreibweise Anmerkung: 6 unabhängige Gleichgewichtsbedingungen dual zu 6 unabhängigen kinematischen Freiheitsgraden (3 Translationen, 3 Rotationen) Anmerkung: Manchmal sind andere (äquivalente) Gleichgewichtsbedingungen zweckmäßiger (s. ebene Probleme) Allgemeine Kräftesysteme 13
15 Zusammenfassung Kräftepaar: zwei gleich große entgegengesetzte Kräfte auf parallelen Wirkungslinien Kräftepaare nicht weiter reduzierbar Charakterisierung durch Moment (Drehsinn und Betrag=Abstand X Hebelarm) Mathematische Beschreibung des Momentes durch Vektor Moment ist abhängig vom betrachteten Punkt Kräftegruppe reduzierbar auf resultierende Kraft und resultierendes Moment Gleichgewichtsbedingungen (sind invariant bzgl. betrachteten Punktes) Allgemeine Kräftesysteme 14
16 Nachtrag zur Konvention von Richtungen und Einheiten Die mechanischen Grundgesetze gelten unabhängig vom Beobachter, etwa von unserer Wahl des Koordinatensystems (Richtung, Ursprung), der Einheiten, der Orientierung der Auflagerkräfte (durch negatives Vorzeichen kompensiert), usw. Aber: Richtungen, Bezugspunkte, Einheiten usw. sind trotzdem manchmal relevant, etwa für den Austausch in Teamarbeit, Übungs-/Klausuraufgaben, mathematische Formulierung von Gesetzen (z.b. Unterscheidung zwischen Zug und Druck), usw. Allgemeine Kräftesysteme 15
Zentrale Kräftesysteme
 2 Zentrale Kräftesysteme Zentrale Kräftesysteme http://www.fotocommunity.de Einteilung von Kräften Grundsätzliches: Einzelkraft ist eine Idealisierung. Volumenkräfte Beispiel: Eigengewicht Flächenkräfte
2 Zentrale Kräftesysteme Zentrale Kräftesysteme http://www.fotocommunity.de Einteilung von Kräften Grundsätzliches: Einzelkraft ist eine Idealisierung. Volumenkräfte Beispiel: Eigengewicht Flächenkräfte
Kräftepaar und Drehmoment
 Kräftepaar und Drehmoment Vorlesung und Übungen 1. Semester BA Architektur KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft www.kit.edu Kräftepaar
Kräftepaar und Drehmoment Vorlesung und Übungen 1. Semester BA Architektur KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft www.kit.edu Kräftepaar
3. Allgemeine Kraftsysteme
 3. Allgemeine Kraftsysteme 3.1 Parallele Kräfte 3.2 Kräftepaar und Moment 3.3 Gleichgewicht in der Ebene Prof. Dr. Wandinger 1. Statik TM 1.3-1 3.1 Parallele Kräfte Bei parallelen Kräften in der Ebene
3. Allgemeine Kraftsysteme 3.1 Parallele Kräfte 3.2 Kräftepaar und Moment 3.3 Gleichgewicht in der Ebene Prof. Dr. Wandinger 1. Statik TM 1.3-1 3.1 Parallele Kräfte Bei parallelen Kräften in der Ebene
Technische Mechanik. P. Kurzeja J. Mosler A. Menzel. Das nachfolgende Skript basiert anerkennend auf den Vorlesungsinhalten von:
 (Technische) Mechanik P. Kurzeja J. Mosler A. Menzel Das nachfolgende Skript basiert anerkennend auf den Vorlesungsinhalten von: Prof. Dr.-Ing. Mosler, Prof. Dr.-Ing. Menzel, Dr.-Ing. Bartel, Prof. Dr.-Ing.
(Technische) Mechanik P. Kurzeja J. Mosler A. Menzel Das nachfolgende Skript basiert anerkennend auf den Vorlesungsinhalten von: Prof. Dr.-Ing. Mosler, Prof. Dr.-Ing. Menzel, Dr.-Ing. Bartel, Prof. Dr.-Ing.
0,6 m. 0,4m. Gegeben seien die obigen drei auf den Balken wirkenden Kräfte mit:
 Kurs: Statik Thema: Resultierende bestimmen Aufgabe 1) Wo liegt bei der Berechnung der Resultierenden der Unterschied zwischen Kräften mit einem gemeinsamen Angriffspunkt und Kräften mit unterschiedlichen
Kurs: Statik Thema: Resultierende bestimmen Aufgabe 1) Wo liegt bei der Berechnung der Resultierenden der Unterschied zwischen Kräften mit einem gemeinsamen Angriffspunkt und Kräften mit unterschiedlichen
Technische Mechanik. Fachwerke
 7 Fachwerke Fachwerke Fachwerke Anwendungsbeispiele... Beispiele aus dem Ingenieurwesen (wikipedia.org) Fachwerke 1 Fachwerke Anwendungsbeispiele nanowerk.com (T. Bückmann) wikipedia.org Beispiele aus
7 Fachwerke Fachwerke Fachwerke Anwendungsbeispiele... Beispiele aus dem Ingenieurwesen (wikipedia.org) Fachwerke 1 Fachwerke Anwendungsbeispiele nanowerk.com (T. Bückmann) wikipedia.org Beispiele aus
5) GLEICHGEWICHT VON KRAEFTEN (Auflagerreaktionen)
 GLEICHGEWICHT VON KRAEFTEN (Auflagerreaktionen)") BAULEITER HOCHBAU S T A T I K / F E S T I G K E I T S L E H R E 5) GLEICHGEWICHT VON KRAEFTEN (Auflagerreaktionen) 1) Einleitung 2) Definition 3) Gleichgewichtsbedingungen der Ebene 4) Beispiele zur Bestimmung
BAULEITER HOCHBAU S T A T I K / F E S T I G K E I T S L E H R E 5) GLEICHGEWICHT VON KRAEFTEN (Auflagerreaktionen) 1) Einleitung 2) Definition 3) Gleichgewichtsbedingungen der Ebene 4) Beispiele zur Bestimmung
Mechanik IA Thomas Antretter
 Vorlesung Thomas Antretter Institut für Mechanik, Montanuniversität Leoben, 8700 Leoben Einteilung Mechanik feste Körper Fluide (Flüssigkeiten, Gase) starre Körper deformierbare Körper Mechanik fester
Vorlesung Thomas Antretter Institut für Mechanik, Montanuniversität Leoben, 8700 Leoben Einteilung Mechanik feste Körper Fluide (Flüssigkeiten, Gase) starre Körper deformierbare Körper Mechanik fester
4.9 Der starre Körper
 4.9 Der starre Körper Unter einem starren Körper versteht man ein physikalische Modell von einem Körper der nicht verformbar ist. Es erfolgt eine Idealisierung durch die Annahme, das zwei beliebig Punkte
4.9 Der starre Körper Unter einem starren Körper versteht man ein physikalische Modell von einem Körper der nicht verformbar ist. Es erfolgt eine Idealisierung durch die Annahme, das zwei beliebig Punkte
Kurs: Statik Thema: Allgemeine Kräftegruppe Bestimmung der Resultierenden F 5
 Kurs: Statik Thema: Allgemeine Kräftegruppe Bestimmung der esultierenden Aufgabe: Belasteter Balken F 5 F 1 F 2 F 3 F 4 F 5 55 110 a a a a a Gegeben: F1 = 20 N F2 = 15 N F3 = 30 N F4 = 10 N F5 = 45 N a
Kurs: Statik Thema: Allgemeine Kräftegruppe Bestimmung der esultierenden Aufgabe: Belasteter Balken F 5 F 1 F 2 F 3 F 4 F 5 55 110 a a a a a Gegeben: F1 = 20 N F2 = 15 N F3 = 30 N F4 = 10 N F5 = 45 N a
Universität für Bodenkultur
 Baustatik Übungen Kolloquiumsvorbereitung Universität für Bodenkultur Department für Bautechnik und Naturgefahren Wien, am 15. Oktober 2004 DI Dr. techn. Roman Geier Theoretischer Teil: Ziele / Allgemeine
Baustatik Übungen Kolloquiumsvorbereitung Universität für Bodenkultur Department für Bautechnik und Naturgefahren Wien, am 15. Oktober 2004 DI Dr. techn. Roman Geier Theoretischer Teil: Ziele / Allgemeine
Technische Mechanik. Statik II. Technische Mechanik Inhaltsübersicht. Prof. (FH) Dr. techn. Andreas Schrempf SS 2016
 Dr. techn. Andreas Schrempf SS 2016") Technische Mechanik Statik II Prof. (FH) Dr. techn. ndreas Schrempf SS 216. Schrempf (Studiengang Medizintechnik) TME2 SS 216 1/ 22 Technische Mechanik Inhaltsübersicht 1 llgemeines Kraftsystem. Schrempf
Technische Mechanik Statik II Prof. (FH) Dr. techn. ndreas Schrempf SS 216. Schrempf (Studiengang Medizintechnik) TME2 SS 216 1/ 22 Technische Mechanik Inhaltsübersicht 1 llgemeines Kraftsystem. Schrempf
Ebene & räumliche Bewegungen. Eine starre ebene Bewegung ist entweder eine. Translation: alle Punkte haben parallele Geschwindigk.
 TechMech Zusammenfassung Ebene & räumliche Bewegungen Drehmoment M [Nm] Andreas Biri, D-ITET 31.07.13 1. Grundlagen Eine starre ebene Bewegung ist entweder eine Translation: alle Punkte haben parallele
TechMech Zusammenfassung Ebene & räumliche Bewegungen Drehmoment M [Nm] Andreas Biri, D-ITET 31.07.13 1. Grundlagen Eine starre ebene Bewegung ist entweder eine Translation: alle Punkte haben parallele
Transformation - 3. Für "übliche" Anwendungen in der Geometrie ist es sinnvoll, bei Transformationen eine gleiche
 Transformation - 3 Wiederholung und spezielle Angaben im Zusammenhang mit Kreis-Berechnungen 1. Problemstellung Im Zusammenhang mit der Berechnung von Schnittflächen kann es sinnvoll sein, die Berechnung
Transformation - 3 Wiederholung und spezielle Angaben im Zusammenhang mit Kreis-Berechnungen 1. Problemstellung Im Zusammenhang mit der Berechnung von Schnittflächen kann es sinnvoll sein, die Berechnung
4) ZUSAMMENSETZEN UND ZERLEGEN VON KRAEFTEN IN DER EBENE
 ZUSAMMENSETZEN UND ZERLEGEN VON KRAEFTEN IN DER EBENE") BAULEITER HOCHBAU S T A T I K / F E S T I G K E I T S L E H R E 4) ZUSAMMENSETZEN UND ZERLEGEN VON KRAEFTEN IN DER EBENE 1) Kräfte greifen in einem Punkt an a) Zusammensetzen (Reduktion) von Kräften -
BAULEITER HOCHBAU S T A T I K / F E S T I G K E I T S L E H R E 4) ZUSAMMENSETZEN UND ZERLEGEN VON KRAEFTEN IN DER EBENE 1) Kräfte greifen in einem Punkt an a) Zusammensetzen (Reduktion) von Kräften -
Mechanik 1. Übungsaufgaben
 Mechanik 1 Übungsaufgaben Universitätsprofessor Dr.-Ing. habil. Jörg Schröder Universität Duisburg-Essen, Standort Essen Fachbereich 10 - Bauwesen Institut für Mechanik Übung zu Mechanik 1 Seite 1 Aufgabe
Mechanik 1 Übungsaufgaben Universitätsprofessor Dr.-Ing. habil. Jörg Schröder Universität Duisburg-Essen, Standort Essen Fachbereich 10 - Bauwesen Institut für Mechanik Übung zu Mechanik 1 Seite 1 Aufgabe
Analytische Geometrie - Das Lotfußpunktverfahren - Gerade/Gerade (R 3 )
") Analytische Geometrie - Das Lotfußpunktverfahren - Gerade/Gerade R 3 ) Gerade - Gerade in R 3 ) Der Fall sich schneidender Geraden ist uninteressant. Es existiert dann ein beliebiger Abstand je nach der
Analytische Geometrie - Das Lotfußpunktverfahren - Gerade/Gerade R 3 ) Gerade - Gerade in R 3 ) Der Fall sich schneidender Geraden ist uninteressant. Es existiert dann ein beliebiger Abstand je nach der
Drehbewegungen (Rotation)
") Drehbewegungen (Rotation) Drehungen (Rotation) Die allgemeine Bewegung eines Systems von Massepunkten lässt sich immer zerlegen in: und Translation Rotation Drehungen - Rotation Die kinematischen Variablen
Drehbewegungen (Rotation) Drehungen (Rotation) Die allgemeine Bewegung eines Systems von Massepunkten lässt sich immer zerlegen in: und Translation Rotation Drehungen - Rotation Die kinematischen Variablen
Gleichgewicht am Punkt
 Gleichgewicht am Punkt 3.1 Gleichgewichtsbedingung für einen Massenpunkt.. 52 3.2 Freikörperbild................................... 52 3.3 Ebene Kräftesysteme............................ 55 3.4 Räumliche
Gleichgewicht am Punkt 3.1 Gleichgewichtsbedingung für einen Massenpunkt.. 52 3.2 Freikörperbild................................... 52 3.3 Ebene Kräftesysteme............................ 55 3.4 Räumliche
Physikalisches Praktikum M 7 Kreisel
 1 Physikalisches Praktikum M 7 Kreisel Versuchsziel Quantitative Untersuchung des Zusammenhangs von Präzessionsfrequenz, Rotationsfrequenz und dem auf die Kreiselachse ausgeübten Kippmoment Literatur /1/
1 Physikalisches Praktikum M 7 Kreisel Versuchsziel Quantitative Untersuchung des Zusammenhangs von Präzessionsfrequenz, Rotationsfrequenz und dem auf die Kreiselachse ausgeübten Kippmoment Literatur /1/
Physik für Biologen und Zahnmediziner
 Physik für Biologen und Zahnmediziner Kapitel 5: Drehmoment, Gleichgewicht und Rotation Dr. Daniel Bick 16. November 2016 Daniel Bick Physik für Biologen und Zahnmediziner 16. November 2016 1 / 39 Impuls
Physik für Biologen und Zahnmediziner Kapitel 5: Drehmoment, Gleichgewicht und Rotation Dr. Daniel Bick 16. November 2016 Daniel Bick Physik für Biologen und Zahnmediziner 16. November 2016 1 / 39 Impuls
Mehmet Maraz. MechanikNachhilfe
 Mehmet Maraz MechanikNachhilfe 1. Auflage 015 Inhaltsverzeichnis 1 Statik 1 1.1 Lagerungen und Lagerreaktionen................. 1. Kräftegleichgewichte......................... 5 1..1 Drehmoment.........................
Mehmet Maraz MechanikNachhilfe 1. Auflage 015 Inhaltsverzeichnis 1 Statik 1 1.1 Lagerungen und Lagerreaktionen................. 1. Kräftegleichgewichte......................... 5 1..1 Drehmoment.........................
2. Zentrale Kraftsysteme
 2. Zentrale Kraftsysteme Definition: Ein Kraftsystem, bei dem sich die Wirkungslinien aller Kräfte in einem Punkt schneiden, wird als zentrales Kraftsystem bezeichnet. Die Kräfte dürfen entlang ihrer Wirkungslinie
2. Zentrale Kraftsysteme Definition: Ein Kraftsystem, bei dem sich die Wirkungslinien aller Kräfte in einem Punkt schneiden, wird als zentrales Kraftsystem bezeichnet. Die Kräfte dürfen entlang ihrer Wirkungslinie
Einleitung 2. 1 Koordinatensysteme 2. 2 Lineare Abbildungen 4. 3 Literaturverzeichnis 7
 Sonja Hunscha - Koordinatensysteme 1 Inhalt Einleitung 2 1 Koordinatensysteme 2 1.1 Kartesisches Koordinatensystem 2 1.2 Polarkoordinaten 3 1.3 Zusammenhang zwischen kartesischen und Polarkoordinaten 3
Sonja Hunscha - Koordinatensysteme 1 Inhalt Einleitung 2 1 Koordinatensysteme 2 1.1 Kartesisches Koordinatensystem 2 1.2 Polarkoordinaten 3 1.3 Zusammenhang zwischen kartesischen und Polarkoordinaten 3
Lagebeziehung von Ebenen
 M8 ANALYSIS Lagebeziehung von Ebenen Es gibt Möglichkeiten für die Lagebeziehung zwischen zwei Ebenen. Die Ebenen sind identisch. Die Ebenen sind parallel. Die Ebenen schneiden sich in einer Geraden Um
M8 ANALYSIS Lagebeziehung von Ebenen Es gibt Möglichkeiten für die Lagebeziehung zwischen zwei Ebenen. Die Ebenen sind identisch. Die Ebenen sind parallel. Die Ebenen schneiden sich in einer Geraden Um
4. Allgemeines ebenes Kräftesystem
 4. llgemeines ebenes Kräftesystem Eine Gruppe von Kräften, die an einem starren Körper angreifen, bilden ein allgemeines Kräftesystem, wenn sich ihre Wirkungslinien nicht in einem gemeinsamen Punkt schneiden.
4. llgemeines ebenes Kräftesystem Eine Gruppe von Kräften, die an einem starren Körper angreifen, bilden ein allgemeines Kräftesystem, wenn sich ihre Wirkungslinien nicht in einem gemeinsamen Punkt schneiden.
2.7 Gravitation, Keplersche Gesetze
 2.7 Gravitation, Keplersche Gesetze Insgesamt gibt es nur vier fundamentale Wechselwirkungen: 1. Gravitation: Massenanziehung 2. elektromagnetische Wechselwirkung: Kräfte zwischen Ladungen 3. starke Wechselwirkung:
2.7 Gravitation, Keplersche Gesetze Insgesamt gibt es nur vier fundamentale Wechselwirkungen: 1. Gravitation: Massenanziehung 2. elektromagnetische Wechselwirkung: Kräfte zwischen Ladungen 3. starke Wechselwirkung:
5 Haftreibung Technische Mechanik Haftreibung
 5 Haftreibung Haftreibung 1 Haftkraft kompakt: Spezielles Lager Kontaktkraft: Aufgrund der Rauhigkeit kann sowohl vertikale Kraft N als auch horizontale Kraft H übertragen werden Kraft N ist Druckkraft
5 Haftreibung Haftreibung 1 Haftkraft kompakt: Spezielles Lager Kontaktkraft: Aufgrund der Rauhigkeit kann sowohl vertikale Kraft N als auch horizontale Kraft H übertragen werden Kraft N ist Druckkraft
Mechanik I. Statik und Festigkeitslehre
 Mechanik I Statik und Festigkeitslehre Vorlesungsbegleitende Unterlagen Bernd Binninger Aachen im Herbst 2018 Institut fu r Technische Verbrennung RWTH Aachen Inhaltsverzeichnis 1 Statik 1 1.1 Kraft...........................................
Mechanik I Statik und Festigkeitslehre Vorlesungsbegleitende Unterlagen Bernd Binninger Aachen im Herbst 2018 Institut fu r Technische Verbrennung RWTH Aachen Inhaltsverzeichnis 1 Statik 1 1.1 Kraft...........................................
6 Mechanik des Starren Körpers
 6 Mechanik des Starren Körpers Ein Starrer Körper läßt sich als System von N Massenpunkten m (mit = 1,...,N) auffassen, die durch starre, masselose Stangen miteinander verbunden sind. Dabei ist N M :=
6 Mechanik des Starren Körpers Ein Starrer Körper läßt sich als System von N Massenpunkten m (mit = 1,...,N) auffassen, die durch starre, masselose Stangen miteinander verbunden sind. Dabei ist N M :=
Physik für Biologen und Zahnmediziner
 Physik für Biologen und Zahnmediziner Kapitel 5: Drehmoment, Gleichgewicht, Rotation Dr. Daniel Bick 14. November 2012 Daniel Bick Physik für Biologen und Zahnmediziner 14. November 2012 1 / 38 Folien
Physik für Biologen und Zahnmediziner Kapitel 5: Drehmoment, Gleichgewicht, Rotation Dr. Daniel Bick 14. November 2012 Daniel Bick Physik für Biologen und Zahnmediziner 14. November 2012 1 / 38 Folien
Physik für Biologen und Zahnmediziner
 Physik für Biologen und Zahnmediziner Kapitel 5: Drehmoment, Gleichgewicht und Rotation Dr. Daniel Bick 16. November 2016 Daniel Bick Physik für Biologen und Zahnmediziner 16. November 2016 1 / 39 Impuls
Physik für Biologen und Zahnmediziner Kapitel 5: Drehmoment, Gleichgewicht und Rotation Dr. Daniel Bick 16. November 2016 Daniel Bick Physik für Biologen und Zahnmediziner 16. November 2016 1 / 39 Impuls
Kapitel 1 PUNKTMECHANIK LERNZIELE INHALT. Körper. Masse
 Kapitel 1 PUNKTMECHANIK LERNZIELE Definition der physikalischen Begriffe Körper, Masse, Ort, Geschwindigkeit, Beschleunigung, Kraft. Newtons Axiome Die Benutzung eines Bezugssystems / Koordinatensystems.
Kapitel 1 PUNKTMECHANIK LERNZIELE Definition der physikalischen Begriffe Körper, Masse, Ort, Geschwindigkeit, Beschleunigung, Kraft. Newtons Axiome Die Benutzung eines Bezugssystems / Koordinatensystems.
Einführung in die Physik für Maschinenbauer
 Einführung in die Physik für Maschinenbauer WS 011/01 Teil 5 7.10/3.11.011 Universität Rostock Heinrich Stolz heinrich.stolz@uni-rostock.de 6. Dynamik von Massenpunktsystemen Bis jetzt: Dynamik eines einzelnen
Einführung in die Physik für Maschinenbauer WS 011/01 Teil 5 7.10/3.11.011 Universität Rostock Heinrich Stolz heinrich.stolz@uni-rostock.de 6. Dynamik von Massenpunktsystemen Bis jetzt: Dynamik eines einzelnen
Übungen 3. Vektoren. 1) Gesucht sind alle möglichen Vektoren c mit der Länge 6, die senkrecht auf den Vektoren a und b stehen.
 Gesucht sind alle möglichen Vektoren c mit der Länge 6, die senkrecht auf den Vektoren a und b stehen.") Vektoren Übungen ) Gesucht sind alle möglichen Vektoren c mit der Länge, die senkrecht auf den Vektoren a und b stehen. a = ( ); b = ( ) a) Ein Dreieck in R ist durch die Punkte O( ), A( ), B( ) definiert.
Vektoren Übungen ) Gesucht sind alle möglichen Vektoren c mit der Länge, die senkrecht auf den Vektoren a und b stehen. a = ( ); b = ( ) a) Ein Dreieck in R ist durch die Punkte O( ), A( ), B( ) definiert.
Lehrveranstaltung Stereostatik
 Lehrveranstaltung Stereostatik Thema 2: Zentrale Kräftesysteme Bergische Universität Wuppertal Baumechanik und Numerische Methoden Prof. Dr.-Ing. W. Zahlten Mechanik 1 Zentrale Kräftesysteme 2.1 Problemstellung
Lehrveranstaltung Stereostatik Thema 2: Zentrale Kräftesysteme Bergische Universität Wuppertal Baumechanik und Numerische Methoden Prof. Dr.-Ing. W. Zahlten Mechanik 1 Zentrale Kräftesysteme 2.1 Problemstellung
5 Gleichgewicht gebundener Systeme
 29 Technische Systeme bestehen aus mehreren miteinander und mit der Umwelt verbundenen Maschinenteilen. Die Bewegung erfolgt über die Lagerfreiheiten, die Verformung der Körper kann i. Allg. vernachlässigt
29 Technische Systeme bestehen aus mehreren miteinander und mit der Umwelt verbundenen Maschinenteilen. Die Bewegung erfolgt über die Lagerfreiheiten, die Verformung der Körper kann i. Allg. vernachlässigt
1. Geradlinige Bewegung
 1. Geradlinige Bewegung 1.1 Kinematik 1.2 Schwerpunktsatz 1.3 Dynamisches Gleichgewicht 1.4 Arbeit und Energie 1.5 Leistung Prof. Dr. Wandinger 3. Kinematik und Kinetik TM 3.1-1 1.1 Kinematik Ort: Bei
1. Geradlinige Bewegung 1.1 Kinematik 1.2 Schwerpunktsatz 1.3 Dynamisches Gleichgewicht 1.4 Arbeit und Energie 1.5 Leistung Prof. Dr. Wandinger 3. Kinematik und Kinetik TM 3.1-1 1.1 Kinematik Ort: Bei
11. Vorlesung Wintersemester
 11. Vorlesung Wintersemester 1 Ableitungen vektorieller Felder Mit Resultat Skalar: die Divergenz diva = A = A + A y y + A z z (1) Mit Resultat Vektor: die Rotation (engl. curl): ( rota = A Az = y A y
11. Vorlesung Wintersemester 1 Ableitungen vektorieller Felder Mit Resultat Skalar: die Divergenz diva = A = A + A y y + A z z (1) Mit Resultat Vektor: die Rotation (engl. curl): ( rota = A Az = y A y
& sind die Vektorkomponenten von und sind die Vektorkoordinaten von. A x. a) Der Betrag eines Vektors
 Der Betrag eines Vektors") Einführu hnung Was ist ein Vektor? In Bereichen der Naturwissenschaften treten Größen auf, die nicht nur durch eine Zahlenangabe dargestellt werden können, wie Kraft oder Geschwindigkeit. Zur vollständigen
Einführu hnung Was ist ein Vektor? In Bereichen der Naturwissenschaften treten Größen auf, die nicht nur durch eine Zahlenangabe dargestellt werden können, wie Kraft oder Geschwindigkeit. Zur vollständigen
Vektoren: Grundbegriffe. 6-E Ma 1 Lubov Vassilevskaya
 Vektoren: Grundbegriffe 6-E Ma 1 Lubov Vassilevskaya Parallele Vektoren Abb. 6-1: Vektoren a, b, c und d liegen auf drei zueinander parallelen Linien l, l' und l'' und haben gleiche Richtung Linien l,
Vektoren: Grundbegriffe 6-E Ma 1 Lubov Vassilevskaya Parallele Vektoren Abb. 6-1: Vektoren a, b, c und d liegen auf drei zueinander parallelen Linien l, l' und l'' und haben gleiche Richtung Linien l,
Raimond Dallmann. Baustatik 1. Berechnung statisch bestimmter Tragwerke. 5., aktualisierte Auflage
 Raimond Dallmann Baustatik Berechnung statisch bestimmter Tragwerke., aktualisierte uflage .3 leichgewicht am Punkt 9 F + F 3 Hinweis: Da die Länge des Richtungsvektors beliebig ist, wurde für n nicht
Raimond Dallmann Baustatik Berechnung statisch bestimmter Tragwerke., aktualisierte uflage .3 leichgewicht am Punkt 9 F + F 3 Hinweis: Da die Länge des Richtungsvektors beliebig ist, wurde für n nicht
Unregelmäßig geformte Scheibe Best.- Nr. MD02256
 Unregelmäßig geformte Scheibe Best.- Nr. MD02256 Momentenlehre Ziel Die unregelmäßig geformte Scheibe wurde gewählt, um den Statik-Kurs zu vervollständigen und um einige praktische Versuche durchzuführen.
Unregelmäßig geformte Scheibe Best.- Nr. MD02256 Momentenlehre Ziel Die unregelmäßig geformte Scheibe wurde gewählt, um den Statik-Kurs zu vervollständigen und um einige praktische Versuche durchzuführen.
Physik für Biologen und Zahnmediziner
 Physik für Biologen und Zahnmediziner Kapitel 4: Arbeit, Energie und Meachnik starrer Körper Dr. Daniel Bick 17. November 2017 Daniel Bick Physik für Biologen und Zahnmediziner 17. November 2017 1 / 39
Physik für Biologen und Zahnmediziner Kapitel 4: Arbeit, Energie und Meachnik starrer Körper Dr. Daniel Bick 17. November 2017 Daniel Bick Physik für Biologen und Zahnmediziner 17. November 2017 1 / 39
Zusammenfassung der Analytischen Geometrie
 Zusammenfassung der Analytischen Geometrie 1. Rechnen mit Vektoren (Addition, Subtraktion, S-Multiplikation, Linearkombinationen) 1. Gegeben sind die Punkte A(2-6 ) und B(-1 14-4), 4 4 sowie die Vektoren
Zusammenfassung der Analytischen Geometrie 1. Rechnen mit Vektoren (Addition, Subtraktion, S-Multiplikation, Linearkombinationen) 1. Gegeben sind die Punkte A(2-6 ) und B(-1 14-4), 4 4 sowie die Vektoren
Transformation - Homogene Koordinaten. y + b )
") Transformation - Homogene Koordinaten In der "üblichen" Behandlung werden für die Verschiebung (Translation) und die Drehung (Rotation) verschiedene Rechenvorschriften benutzt - einmal Addition von Vektoren
Transformation - Homogene Koordinaten In der "üblichen" Behandlung werden für die Verschiebung (Translation) und die Drehung (Rotation) verschiedene Rechenvorschriften benutzt - einmal Addition von Vektoren
Die Kraft. F y. f A. F x. e y. Institut für Mechanik und Fluiddynamik Festkörpermechanik: Prof. Dr. M. Kuna
 Institut für echanik und luiddnamik estkörpermechanik: Prof. Dr.. Kuna Technische echanik rbeitsblätter Die Kraft f e e T rbeitsblätter_7.0.00_neu.doc Institut für echanik und luiddnamik estkörpermechanik:
Institut für echanik und luiddnamik estkörpermechanik: Prof. Dr.. Kuna Technische echanik rbeitsblätter Die Kraft f e e T rbeitsblätter_7.0.00_neu.doc Institut für echanik und luiddnamik estkörpermechanik:
2.3.4 Drehungen in drei Dimensionen
 2.3.4 Drehungen in drei Dimensionen Wir verallgemeinern die bisherigen Betrachtungen nun auf den dreidimensionalen Fall. Für Drehungen des Koordinatensystems um die Koordinatenachsen ergibt sich 1 x 1
2.3.4 Drehungen in drei Dimensionen Wir verallgemeinern die bisherigen Betrachtungen nun auf den dreidimensionalen Fall. Für Drehungen des Koordinatensystems um die Koordinatenachsen ergibt sich 1 x 1
Technische Mechanik. Statik
 Hans Albert Richard Manuela Sander Technische Mechanik. Statik Lehrbuch mit Praxisbeispielen, Klausuraufgaben und Lösungen 4., überarbeitete und erweiterte Auflage Mit 263 Abbildungen ^ Springer Vieweg
Hans Albert Richard Manuela Sander Technische Mechanik. Statik Lehrbuch mit Praxisbeispielen, Klausuraufgaben und Lösungen 4., überarbeitete und erweiterte Auflage Mit 263 Abbildungen ^ Springer Vieweg
Klassische und Relativistische Mechanik
 Klassische und Relativistische Mechanik Othmar Marti 09. 01. 2008 Institut für Experimentelle Physik Physik, Wirtschaftsphysik und Lehramt Physik Seite 2 Physik Klassische und Relativistische Mechanik
Klassische und Relativistische Mechanik Othmar Marti 09. 01. 2008 Institut für Experimentelle Physik Physik, Wirtschaftsphysik und Lehramt Physik Seite 2 Physik Klassische und Relativistische Mechanik
11 Balkenbiegung Technische Mechanik Balkenbiegung
 11 Balkenbiegung Balkenbiegung 2 Motivation / Einführung Ziele: Berechnung der Balkendurchbiegung (Deformation) Berechnung der Schnittgrößen für statisch unbestimmte Systeme Balken Definition Stabförmig;
11 Balkenbiegung Balkenbiegung 2 Motivation / Einführung Ziele: Berechnung der Balkendurchbiegung (Deformation) Berechnung der Schnittgrößen für statisch unbestimmte Systeme Balken Definition Stabförmig;
3 Zentrale ebene Kräftegruppen
 25 3 Zentrale ebene Kräftegruppen 3.1 Erste Grundaufgabe: Zerlegung... 26 3.2 Zweite Grundaufgabe: Reduktion... 30 3.3 Dritte Grundaufgabe: Gleichgewicht... 34 3.4 ufgaben zu Kapitel 3... 39 Springer achmedien
25 3 Zentrale ebene Kräftegruppen 3.1 Erste Grundaufgabe: Zerlegung... 26 3.2 Zweite Grundaufgabe: Reduktion... 30 3.3 Dritte Grundaufgabe: Gleichgewicht... 34 3.4 ufgaben zu Kapitel 3... 39 Springer achmedien
Die 3D-Parameter des Adjust-Fensters im Programm Apophysis 2.08 Beta 3D Hack
 Die 3D-Parameter des Adjust-Fensters im Programm Apophysis 2.08 Beta 3D Hack Perspective und Pitch Das Bild wurde mit 4 TF s, jede mit der Variation Sinusoidalxy, erstellt. Wenn Sinusoidalxy_height = 0
Die 3D-Parameter des Adjust-Fensters im Programm Apophysis 2.08 Beta 3D Hack Perspective und Pitch Das Bild wurde mit 4 TF s, jede mit der Variation Sinusoidalxy, erstellt. Wenn Sinusoidalxy_height = 0
Physikalische Anwendungen Statik
 Physikalische Anwendungen Statik Zum Mathematik-Lehrbuch Notwendig und zunächst hinreichend (Shaker Verlag, Aachen) gibt es mehrere PDF-Dokumente mit ergänzenden Beispielen und Aufgaben, die die Anwendung
Physikalische Anwendungen Statik Zum Mathematik-Lehrbuch Notwendig und zunächst hinreichend (Shaker Verlag, Aachen) gibt es mehrere PDF-Dokumente mit ergänzenden Beispielen und Aufgaben, die die Anwendung
Physik für Biologen und Zahnmediziner
 Physik für Biologen und Zahnmediziner Kapitel 5: Impuls und Drehungen Dr. Daniel Bick 22. November 2017 Daniel Bick Physik für Biologen und Zahnmediziner 22. November 2017 1 / 36 Hinweise zur Klausur Sa,
Physik für Biologen und Zahnmediziner Kapitel 5: Impuls und Drehungen Dr. Daniel Bick 22. November 2017 Daniel Bick Physik für Biologen und Zahnmediziner 22. November 2017 1 / 36 Hinweise zur Klausur Sa,
3. Zentrales ebenes Kräftesystem
 3. Zentrales ebenes Kräftesystem Eine ruppe von Kräften, die an einem starren Körper angreifen, bilden ein zentrales Kräftesystem, wenn sich die Wirkungslinien aller Kräfte in einem Punkt schneiden. f
3. Zentrales ebenes Kräftesystem Eine ruppe von Kräften, die an einem starren Körper angreifen, bilden ein zentrales Kräftesystem, wenn sich die Wirkungslinien aller Kräfte in einem Punkt schneiden. f
Theoretische Mechanik
 Prof. Dr. R. Ketzmerick/Dr. R. Schumann Technische Universität Dresden Institut für Theoretische Physik Sommersemester 2008 Theoretische Mechanik 9. Übung 9.1 d alembertsches Prinzip: Flaschenzug Wir betrachten
Prof. Dr. R. Ketzmerick/Dr. R. Schumann Technische Universität Dresden Institut für Theoretische Physik Sommersemester 2008 Theoretische Mechanik 9. Übung 9.1 d alembertsches Prinzip: Flaschenzug Wir betrachten
Grundsätzliches Produkte Anwendungen in der Geometrie. Vektorrechnung. Fakultät Grundlagen. Juli 2015
 Vektorrechnung Fakultät Grundlagen Juli 205 Fakultät Grundlagen Vektorrechnung Übersicht Grundsätzliches Grundsätzliches Vektorbegriff Algebraisierung der Vektorrechnung Betrag 2 Skalarprodukt Vektorprodukt
Vektorrechnung Fakultät Grundlagen Juli 205 Fakultät Grundlagen Vektorrechnung Übersicht Grundsätzliches Grundsätzliches Vektorbegriff Algebraisierung der Vektorrechnung Betrag 2 Skalarprodukt Vektorprodukt
KG-Oberkurs 2011 Vorlesungen: Grundlagen der Kinematik und Dynamik
 KG-Oberkurs 011 Vorlesungen: Grundlagen der Kinematik und Dynamik Dr.-Ing. Ulrich Simon 1 Allgemeines Biomechanik Biologie Mechanik Ziel der Vorlesung: Mechanische Grundlagen in anschaulicher Form aufzufrischen.
KG-Oberkurs 011 Vorlesungen: Grundlagen der Kinematik und Dynamik Dr.-Ing. Ulrich Simon 1 Allgemeines Biomechanik Biologie Mechanik Ziel der Vorlesung: Mechanische Grundlagen in anschaulicher Form aufzufrischen.
Prinzip der virtuellen Verschiebung
 1 Elektrostatik 52 Prinzip der virtuellen Verschiebung Wir verwenden hier das Prinzip der virtuellen Verschiebung (PVV) zur Berechnung der Kraft auf einen Körper im elektrostatischen Feld. Beim PVV wird
1 Elektrostatik 52 Prinzip der virtuellen Verschiebung Wir verwenden hier das Prinzip der virtuellen Verschiebung (PVV) zur Berechnung der Kraft auf einen Körper im elektrostatischen Feld. Beim PVV wird
Prüfungsteil B, Aufgabengruppe 2: Geometrie
 Bundesabitur Mathematik: Bayern 01 Aufgabe 1 a) 1. SCHRITT: VEKTOR CH BESTIMMEN CH = ( 8 108 ) ( 10) = ( 0 ). 3. SCHRITT: LÄNGE DES VEKTORS BERECHNEN CH = ( ) + 3 =. 3. SCHRITT: BERECHNUNG DES FLÄCHENINHALTS
Bundesabitur Mathematik: Bayern 01 Aufgabe 1 a) 1. SCHRITT: VEKTOR CH BESTIMMEN CH = ( 8 108 ) ( 10) = ( 0 ). 3. SCHRITT: LÄNGE DES VEKTORS BERECHNEN CH = ( ) + 3 =. 3. SCHRITT: BERECHNUNG DES FLÄCHENINHALTS
www.statik-lernen.de Inhaltsverzeichnis Kräfte und Kraftarten Äußere und innere Kräfte Das zentrale Kräftesystem Momente Auflager Zustandslinien
 www.statik-lernen.de Grundlagen Inhaltsverzeichnis Kräfte und Kraftarten o Bestimmung von Kräften... Seite 1 o Graphische Darstellung... Seite 1 o Einheit der Kraft... Seite 1 o Kräftegleichgewicht...
www.statik-lernen.de Grundlagen Inhaltsverzeichnis Kräfte und Kraftarten o Bestimmung von Kräften... Seite 1 o Graphische Darstellung... Seite 1 o Einheit der Kraft... Seite 1 o Kräftegleichgewicht...
YOUNG SCIENTISTS. 4 dimensionale komplexe Zahlen in der Computergrafik. Bastian Weiß 19. Mai 2017 INSTITUT FÜR ANGEWANDTE GEOMETRIE
 YOUNG SCIENTISTS 4 dimensionale komplexe in der Computergrafik Bastian Weiß 19. Mai 2017 INSTITUT FÜR ANGEWANDTE GEOMETRIE Programm Vorbereitung (Wiederholung) Komplexe Vektoren Quaternionen Quaternionen
YOUNG SCIENTISTS 4 dimensionale komplexe in der Computergrafik Bastian Weiß 19. Mai 2017 INSTITUT FÜR ANGEWANDTE GEOMETRIE Programm Vorbereitung (Wiederholung) Komplexe Vektoren Quaternionen Quaternionen
Inhaltsverzeichnis. Raimond Dallmann. Baustatik 1. Berechnung statisch bestimmter Tragwerke ISBN:
 Inhaltsverzeichnis Raimond Dallmann Baustatik 1 Berechnung statisch bestimmter Tragwerke ISBN: 978-3-446-42319-0 Weitere Informationen oder Bestellungen unter http://www.hanser.de/978-3-446-42319-0 sowie
Inhaltsverzeichnis Raimond Dallmann Baustatik 1 Berechnung statisch bestimmter Tragwerke ISBN: 978-3-446-42319-0 Weitere Informationen oder Bestellungen unter http://www.hanser.de/978-3-446-42319-0 sowie
1 Vorlesungen: und Vektor Rechnung: 1.Teil
 1 Vorlesungen: 4.10.005 und 31.10.005 Vektor Rechnung: 1.Teil Einige in der Physik auftretende Messgrößen sind durch eine einzige Zahl bestimmt: Temperatur T K Dichte kg/m 3 Leistung P Watt = J/s = kg
1 Vorlesungen: 4.10.005 und 31.10.005 Vektor Rechnung: 1.Teil Einige in der Physik auftretende Messgrößen sind durch eine einzige Zahl bestimmt: Temperatur T K Dichte kg/m 3 Leistung P Watt = J/s = kg
2. Translation und Rotation
 2. Translation und Rotation 2.1 Rotation eines Vektors 2.2 Rotierendes ezugssystem 2.3 Kinetik Prof. Dr. Wandinger 2. Relativbewegungen Dynamik 2 2.2-1 2.1 Rotation eines Vektors Gesucht wird die zeitliche
2. Translation und Rotation 2.1 Rotation eines Vektors 2.2 Rotierendes ezugssystem 2.3 Kinetik Prof. Dr. Wandinger 2. Relativbewegungen Dynamik 2 2.2-1 2.1 Rotation eines Vektors Gesucht wird die zeitliche
3.1 Gleichgewichtsbedingung Freikörperbild Ebene Kräftesysteme Räumliche Kräftesysteme
 Inhaltsverzeichnis Einleitung 9 Vorwort zur deutschen Neuauflage.............................................. 10 Zum Inhalt................................................................. 11 Hinweise
Inhaltsverzeichnis Einleitung 9 Vorwort zur deutschen Neuauflage.............................................. 10 Zum Inhalt................................................................. 11 Hinweise
1.6 Nichtzentrale Kräftesysteme
 1.6 Nichtzentrale Kräftesysteme 1.6.1 Zusammensetzen von ebenen Kräften mit verschiedenen ngriffspunkten Je zwei Kräfte bilden ein zentrales Kräftesystem, wenn sie nicht gerade zueinander parallel verlaufen
1.6 Nichtzentrale Kräftesysteme 1.6.1 Zusammensetzen von ebenen Kräften mit verschiedenen ngriffspunkten Je zwei Kräfte bilden ein zentrales Kräftesystem, wenn sie nicht gerade zueinander parallel verlaufen
Kreis - Tangente. 2. Vorbemerkung: Satz des Thales Eine Möglichkeit zur Bestimmung der Tangente benutzt den Satz des Thales.
 Kreis - Tangente 1. Allgemeines 2. Satz des Thales 3. Tangente an einem Punkt auf dem Kreis 4. Tangente über Analysis (an einem Punkt eines Ursprungkreises) 5. Tangente von einem Punkt (Pol) an den Kreis
Kreis - Tangente 1. Allgemeines 2. Satz des Thales 3. Tangente an einem Punkt auf dem Kreis 4. Tangente über Analysis (an einem Punkt eines Ursprungkreises) 5. Tangente von einem Punkt (Pol) an den Kreis
Kreis - Übungen. 1) Die y-achse ist am Punkt A eine Tangente an den Kreis. Mit dem noch nicht bekannten "Zwischenwert"
 Die y-achse ist am Punkt A eine Tangente an den Kreis. Mit dem noch nicht bekannten Zwischenwert") Kreis - Übungen Wenn die "Kreisgleichung" gesucht ist, sind der Mittelpunkt und der Radius anzugeben. Es ist möglich, dass mehrere Kreise eine Aufgabenstellung erfüllen. 1) Ein Kreis berührt die y-achse
Kreis - Übungen Wenn die "Kreisgleichung" gesucht ist, sind der Mittelpunkt und der Radius anzugeben. Es ist möglich, dass mehrere Kreise eine Aufgabenstellung erfüllen. 1) Ein Kreis berührt die y-achse
Vorlesung Technische Mechanik 1 Statik, Wintersemester 2007/2008. Technische Mechanik
 Technische Mechanik 1. Einleitung 2. Statik des starren Körpers 3. Statik von Systemen starrer Körper 3.1 Gleichgewichtsbedingungen, das Erstarrungsprinzip 3.2 Lager 3.2.1 Lagerung in der Ebene 3.2.2 Allgemeiner
Technische Mechanik 1. Einleitung 2. Statik des starren Körpers 3. Statik von Systemen starrer Körper 3.1 Gleichgewichtsbedingungen, das Erstarrungsprinzip 3.2 Lager 3.2.1 Lagerung in der Ebene 3.2.2 Allgemeiner
(x 1. Vektoren. g: x = p + r u. p r (u1. x 2. u 2. p 2
 Vektoren Mit der Vektorrechnung werden oft geometrische Probleme gelöst. Wenn irgendwelche Aufgabenstellungen geometrisch darstellbar sind, z.b. Flugbahnen oder Abstandsberechnungen, dann können sie mit
Vektoren Mit der Vektorrechnung werden oft geometrische Probleme gelöst. Wenn irgendwelche Aufgabenstellungen geometrisch darstellbar sind, z.b. Flugbahnen oder Abstandsberechnungen, dann können sie mit
Anwendung v. symmetrischen Matrizen: Hauptachsentransformation
 Anwendung v. symmetrischen Matrizen: Hauptachsentransformation Einleitende Bemerkungen: Gl. für Kreis: Gl. für Elllipse: (gestauchter Kreis) Gl. für Kugel: Gl. für Elllipsoid: (gestauchter Kugel) Diese
Anwendung v. symmetrischen Matrizen: Hauptachsentransformation Einleitende Bemerkungen: Gl. für Kreis: Gl. für Elllipse: (gestauchter Kreis) Gl. für Kugel: Gl. für Elllipsoid: (gestauchter Kugel) Diese
2.5. Geraden und Ebenen
 .5. Geraden und Ebenen Parameterdarstellungen von Geraden und Ebenen gewinnt man, indem man einen Ortsvektor (mit Spitze auf der Geraden oder Ebene und einen bzw. zwei Richtungsvektoren wählt, welche die
.5. Geraden und Ebenen Parameterdarstellungen von Geraden und Ebenen gewinnt man, indem man einen Ortsvektor (mit Spitze auf der Geraden oder Ebene und einen bzw. zwei Richtungsvektoren wählt, welche die
Physik für Biologen und Zahnmediziner
 Physik für Biologen und Zahnmediziner Kapitel 5: Impuls und Drehungen Dr. Daniel Bick 22. November 2017 Daniel Bick Physik für Biologen und Zahnmediziner 22. November 2017 1 / 24 Hinweise zur Klausur Sa,
Physik für Biologen und Zahnmediziner Kapitel 5: Impuls und Drehungen Dr. Daniel Bick 22. November 2017 Daniel Bick Physik für Biologen und Zahnmediziner 22. November 2017 1 / 24 Hinweise zur Klausur Sa,
Projektion. Ebene geometrische Projektionen
 Projektion - 1 - Ebene geometrische Projektionen Die ebenen geometrischen Projektionen sind dadurch charakterisiert, daß mit Projektionsstrahlen konstanter Richtung, d.h. entlang von Geraden, auf Ebenen
Projektion - 1 - Ebene geometrische Projektionen Die ebenen geometrischen Projektionen sind dadurch charakterisiert, daß mit Projektionsstrahlen konstanter Richtung, d.h. entlang von Geraden, auf Ebenen
Vektoren - Basiswechsel
 Vektoren - Basiswechsel Grundprinzip Für rein geometrische Anwendungen verwendet man üblicherweise die Standardbasis. Damit ergibt sich in den Zahlenangaben der Koordinaten kein Unterschied zu einem Bezug
Vektoren - Basiswechsel Grundprinzip Für rein geometrische Anwendungen verwendet man üblicherweise die Standardbasis. Damit ergibt sich in den Zahlenangaben der Koordinaten kein Unterschied zu einem Bezug
3. Impuls und Drall. Prof. Dr. Wandinger 2. Kinetik des Massenpunkts Dynamik 2.3-1
 3. Impuls und Drall Die Integration der Bewegungsgleichung entlang der Bahn führte auf die Begriffe Arbeit und Energie. Die Integration der Bewegungsgleichung bezüglich der Zeit führt auf die Begriffe
3. Impuls und Drall Die Integration der Bewegungsgleichung entlang der Bahn führte auf die Begriffe Arbeit und Energie. Die Integration der Bewegungsgleichung bezüglich der Zeit führt auf die Begriffe
, v 3 = und v 4 =, v 2 = V 1 = { c v 1 c R }.
 154 e Gegeben sind die Vektoren v 1 = ( 10 1, v = ( 10 1. Sei V 1 = v 1 der von v 1 aufgespannte Vektorraum in R 3. 1 Dann besteht V 1 aus allen Vielfachen von v 1, V 1 = { c v 1 c R }. ( 0 ( 01, v 3 =
154 e Gegeben sind die Vektoren v 1 = ( 10 1, v = ( 10 1. Sei V 1 = v 1 der von v 1 aufgespannte Vektorraum in R 3. 1 Dann besteht V 1 aus allen Vielfachen von v 1, V 1 = { c v 1 c R }. ( 0 ( 01, v 3 =
Fragen aus dem Repetitorium II
 Fragen aus dem Repetitorium II Folgend werden die Fragen des Repetitoriums II, welche ihr im Skript ab Seite 182 findet, behandelt. Die Seiten werden ständig aktualisiert und korrigiert, so daß es sich
Fragen aus dem Repetitorium II Folgend werden die Fragen des Repetitoriums II, welche ihr im Skript ab Seite 182 findet, behandelt. Die Seiten werden ständig aktualisiert und korrigiert, so daß es sich
Teil II. Geometrie 19
 Teil II. Geometrie 9 5. Dreidimensionales Koordinatensystem Im dreidimensionalen Koordinatensystem gibt es acht Oktanten, oben I bis VI und unten VI bis VIII. Die Koordinatenachsen,x 2 und stehen jeweils
Teil II. Geometrie 9 5. Dreidimensionales Koordinatensystem Im dreidimensionalen Koordinatensystem gibt es acht Oktanten, oben I bis VI und unten VI bis VIII. Die Koordinatenachsen,x 2 und stehen jeweils
Drehimpuls, Drehmoment, Kraft-/Drehmoment-"Wandler"
 Aufgaben 5 Rotations-Mechanik Drehimpuls, Drehmoment, Kraft-/Drehmoment-"Wandler" Lernziele - das Drehimpulsbilanzgesetz verstehen und anwenden können. - wissen und verstehen, dass sich die Wirkung einer
Aufgaben 5 Rotations-Mechanik Drehimpuls, Drehmoment, Kraft-/Drehmoment-"Wandler" Lernziele - das Drehimpulsbilanzgesetz verstehen und anwenden können. - wissen und verstehen, dass sich die Wirkung einer
Normalenformen. 1 Normalengleichung einer Geraden im IR 2. Bekannt als parameterfreie Form aus Kapitel IV.4.5 jetzt genauer unter die Lupe genommen!
 VII Normalenformen Bekannt als parameterfreie Form aus Kapitel IV.4.5 jetzt genauer unter die Lupe genommen! 1 Normalengleichung einer Geraden im IR Definition der Normalengleichung der Geraden geht nur
VII Normalenformen Bekannt als parameterfreie Form aus Kapitel IV.4.5 jetzt genauer unter die Lupe genommen! 1 Normalengleichung einer Geraden im IR Definition der Normalengleichung der Geraden geht nur
Energie und Energieerhaltung
 Arbeit und Energie Energie und Energieerhaltung Es gibt keine Evidenz irgendwelcher Art dafür, dass Energieerhaltung in irgendeinem System nicht erfüllt ist. Energie im Austausch In mechanischen und biologischen
Arbeit und Energie Energie und Energieerhaltung Es gibt keine Evidenz irgendwelcher Art dafür, dass Energieerhaltung in irgendeinem System nicht erfüllt ist. Energie im Austausch In mechanischen und biologischen
Gleiche Vorgehensweise wie beim Einheitsvektor in der Ebene (also wie bei 2D).Beispiel:
.Beispiel:") VEKTOREN Vektoren im Raum (3D) Länge/Betrag eines räumlichen Vektors Um die Länge eines räumlichen Vektors zu bestimmen, berechnen wir dessen Betrag. Auch hier rechnet man genauso wie bei einem zweidimensionalen
VEKTOREN Vektoren im Raum (3D) Länge/Betrag eines räumlichen Vektors Um die Länge eines räumlichen Vektors zu bestimmen, berechnen wir dessen Betrag. Auch hier rechnet man genauso wie bei einem zweidimensionalen
6.6. Abstandsbestimmungen
 6.6. Abstandsbestimmungen 6. Geraden und Ebenen im Raum In diesem Kapitel werden folgende Fälle vorgestellt:. Abstand zweier Punkte. Abstand zweier paralleler Geraden 3. Abstand einer Ebene zu einer zur
6.6. Abstandsbestimmungen 6. Geraden und Ebenen im Raum In diesem Kapitel werden folgende Fälle vorgestellt:. Abstand zweier Punkte. Abstand zweier paralleler Geraden 3. Abstand einer Ebene zu einer zur
5.3 Drehimpuls und Drehmoment im Experiment
 5.3. DREHIMPULS UND DREHMOMENT IM EXPERIMENT 197 5.3 Drehimpuls und Drehmoment im Experiment Wir besprechen nun einige Experimente zum Thema Drehimpuls und Drehmoment. Wir betrachten ein System von N Massenpunkten,
5.3. DREHIMPULS UND DREHMOMENT IM EXPERIMENT 197 5.3 Drehimpuls und Drehmoment im Experiment Wir besprechen nun einige Experimente zum Thema Drehimpuls und Drehmoment. Wir betrachten ein System von N Massenpunkten,
Transformation Allgemeines Die Lage eines Punktes kann durch einen Ortsvektor (ausgehend vom Ursprung des Koordinatensystems
 Transformation - 1 1. Allgemeines 2. Zwei durch eine Translation verknüpfte gleichartige Basissysteme 3. Zwei durch eine Translation verknüpfte verschiedenartige Basissysteme (noch gleiche Orientierung)
Transformation - 1 1. Allgemeines 2. Zwei durch eine Translation verknüpfte gleichartige Basissysteme 3. Zwei durch eine Translation verknüpfte verschiedenartige Basissysteme (noch gleiche Orientierung)
2. Statisch bestimmte Systeme
 1 von 14 2. Statisch bestimmte Systeme 2.1 Definition Eine Lagerung nennt man statisch bestimmt, wenn die Lagerreaktionen (Kräfte und Momente) allein aus den Gleichgewichtsbedingungen bestimmbar sind.
1 von 14 2. Statisch bestimmte Systeme 2.1 Definition Eine Lagerung nennt man statisch bestimmt, wenn die Lagerreaktionen (Kräfte und Momente) allein aus den Gleichgewichtsbedingungen bestimmbar sind.
7. Lektion Drehmoment, Hebel, Schwerpunkt. H. Zabel 7. Lektion: Drehmoment 1
 7. Lektion Drehmoment, Hebel, Schwerpunkt H. Zabel 7. Lektion: Drehmoment 1 Lernziel: Drehmoment bewirkt eine zeitliche Änderung des Drehimpulses, analog zur Kraft, die eine zeitliche Änderung des Impulses
7. Lektion Drehmoment, Hebel, Schwerpunkt H. Zabel 7. Lektion: Drehmoment 1 Lernziel: Drehmoment bewirkt eine zeitliche Änderung des Drehimpulses, analog zur Kraft, die eine zeitliche Änderung des Impulses
5 Kinematik der Starrkörperbewegung
 35 Ein starrer Körper ist eine Idealisierung eines Maschinenteils, bei der man Verformungen vernachlässigt. Verbindet man mit dem Körper in einem beliebigen Beugspunkt ein körperfestes Koordinatensstem,
35 Ein starrer Körper ist eine Idealisierung eines Maschinenteils, bei der man Verformungen vernachlässigt. Verbindet man mit dem Körper in einem beliebigen Beugspunkt ein körperfestes Koordinatensstem,
1. Grundlagen der ebenen Kinematik
 Lage: Die Lage eines starren Körpers in der Ebene ist durch die Angabe von zwei Punkten A und P eindeutig festgelegt. Die Lage eines beliebigen Punktes P wird durch Polarkoordinaten bezüglich des Bezugspunktes
Lage: Die Lage eines starren Körpers in der Ebene ist durch die Angabe von zwei Punkten A und P eindeutig festgelegt. Die Lage eines beliebigen Punktes P wird durch Polarkoordinaten bezüglich des Bezugspunktes
Feldbacher Markus Manipulationstechnik Kinematik. Kinetik. (Bewegungslehre) Mechanik Lehre von der Bewegung von Körpern
 Mechanik Lehre von der Bewegung von Körpern") Kinematik (Bewegungslehre) Mechanik Lehre von der Bewegung von Körpern Kinematik Lehre von den geo- Metrischen Bewegungsverhältnissen von Körpern. Dynamik Lehre von den Kräften Kinetik Lehre von den Bewegungen
Kinematik (Bewegungslehre) Mechanik Lehre von der Bewegung von Körpern Kinematik Lehre von den geo- Metrischen Bewegungsverhältnissen von Körpern. Dynamik Lehre von den Kräften Kinetik Lehre von den Bewegungen
Vektoren - Die Basis
 Vektoren - Die Basis Motivation (Als Vereinfachung - der Schreibarbeit - wählen wir meistens Vektoren in R 2.) Eigentlich ist ja Alles klar! Für einen Vektor a gilt a = ( a x a y )! Am Ende werden wir
Vektoren - Die Basis Motivation (Als Vereinfachung - der Schreibarbeit - wählen wir meistens Vektoren in R 2.) Eigentlich ist ja Alles klar! Für einen Vektor a gilt a = ( a x a y )! Am Ende werden wir
Das Hebelgesetz zur Lösung technischer Aufgaben
 Es gibt einseitige Hebel, zweiseitige Hebel und Winkelhebel. Mit allen Hebeln kann man die Größe und Richtung von Kräften ändern. In der Regel verwendet man Hebel zur Vergrößerung von Kräften. Das Hebelgesetz
Es gibt einseitige Hebel, zweiseitige Hebel und Winkelhebel. Mit allen Hebeln kann man die Größe und Richtung von Kräften ändern. In der Regel verwendet man Hebel zur Vergrößerung von Kräften. Das Hebelgesetz
Kapitel 2 Kräfte und Momente in der ebenen Statik
 Kapitel 2 Kräfte und Momente in der ebenen Statik 2 2 2 Kräfte und Momente in der ebenen Statik 2.1 Kräfte in der Ebene mit gemeinsamem Schnittpunkt ihrer Wirkungslinien... 19 2.1.1 Ermittlung der resultierenden
Kapitel 2 Kräfte und Momente in der ebenen Statik 2 2 2 Kräfte und Momente in der ebenen Statik 2.1 Kräfte in der Ebene mit gemeinsamem Schnittpunkt ihrer Wirkungslinien... 19 2.1.1 Ermittlung der resultierenden
Definition: Euklidischer Raum mit Skalarprodukt. Die kanonische Basis von Einheitsvektoren sind paarweise orthogonal zueinander:
 Definition: Euklidischer Raum mit Skalarprodukt Einsteinsche Summenkonvention (ES): über doppelt vorkommende Indizes wird summiert. Die kanonische Basis von Einheitsvektoren sind paarweise orthogonal zueinander:
Definition: Euklidischer Raum mit Skalarprodukt Einsteinsche Summenkonvention (ES): über doppelt vorkommende Indizes wird summiert. Die kanonische Basis von Einheitsvektoren sind paarweise orthogonal zueinander:
4 Gleichgewicht gebundener Körper
 23 Bindungen und en beschränken die Bewegungsfreiheiten eines Körpers (oder Teilsystems) und rufen Lagerreaktionen hervor, welche auf andere Belastungen des Körpers reagieren" und somit die Bindungen aufrechterhalten.
23 Bindungen und en beschränken die Bewegungsfreiheiten eines Körpers (oder Teilsystems) und rufen Lagerreaktionen hervor, welche auf andere Belastungen des Körpers reagieren" und somit die Bindungen aufrechterhalten.