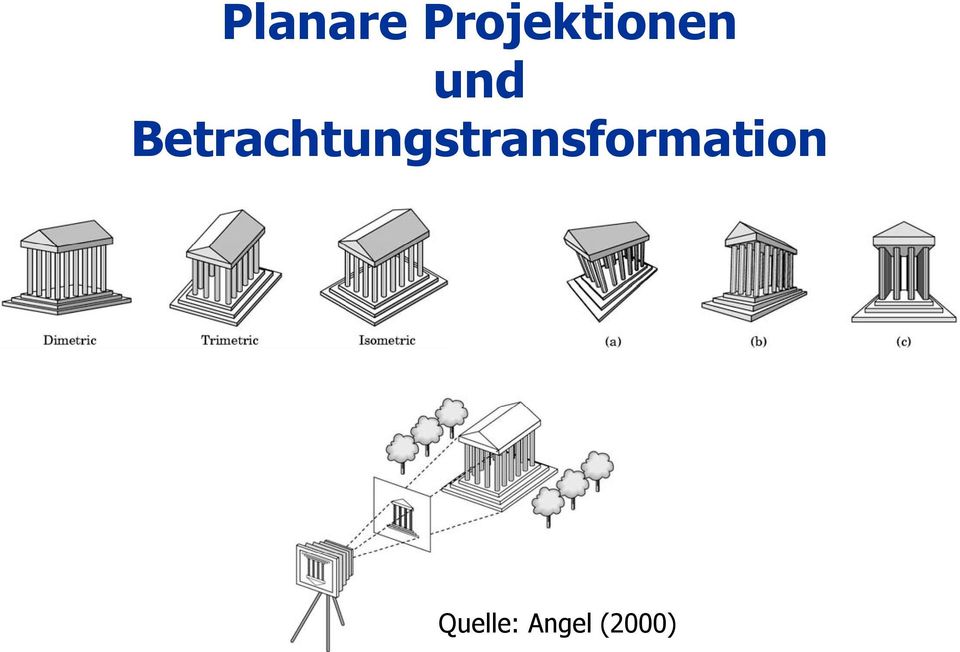
Planare Projektionen und Betrachtungstransformation. Quelle: Angel (2000)
|
|
|
- Mina Krause
- vor 8 Jahren
- Abrufe
Transkript
1 Planare Projektionen und Betrachtungstransformation Quelle: Angel (2)
2 Gliederung Einführung Parallelprojektionen Perspektivische Projektionen Kameramodell und Betrachtungstransformationen Mathematische Beschreibung von Projektionen B. Preim AG Visualisierung Projektionen 2

3 Einführung A painting [the projection plane] is the intersection of a visual pyramid [view volume] at a given distance, with a fixed center [center of projection] and a defined position of light, represented by art with lines and colors on a given surface [the rendering]. (Alberti, 1435) Hans Vredemann de Vries: Perspektiv 164 B. Preim AG Visualisierung Projektionen 3
 Hans Vredemann de Vries: Perspektiv 164 B.")
4 Einführung Planare Projektionen: Projektionsstrahlen sind Geraden Gerade Linien werden auf gerade Linien abgebildet (es entstehen keine Krümmungen). Projektionsfläche ist eine Ebene. B. Preim AG Visualisierung Projektionen 4

5 Einführung Wichtige Begriffe und Abkürzungen: Parallelprojektion ist charakterisiert durch die Richtung der Projektion (direction of projection, dop) Perspektivische Projektion ist charakterisiert durch das Projektionszentrum (center of projection, cop) Ebene auf die das Bild projiziert wird: Sichtebene (view plane). Vektor, der senkrecht zur Projektionsebene steht: Normale der Sichtebene (view plane normal, vpn). Strahlen, die die Projektion charakterisieren: Projektoren. Bei perspektivischer Projektion gehen sie vom cop aus und divergieren; bei der Parallelprojektion sind sie parallel. B. Preim AG Visualisierung Projektionen 5

6 Klassifikation planarer Projektionen Rechtwinklige Parallelprojektion: vpn und dop stimmen überein. Schräge Parallelprojektion: vpn und dop sind ungleich. B. Preim AG Visualisierung Projektionen 6

7 Parallelprojektionen Parallelprojektion Projektionszentrum liegt im Unendlichen Projektionsstrahlen verlaufen parallel Keine perspektivische Verkürzung Parallele Linien bleiben parallel. Unterschiede: Winkel zwischen vpn und dop sowie Winkel zwischen dop und den Koordinatenachsen Quelle: Angel (2) Konsequenzen für die Computergraphik: Mehrere Bestandteile des Renderingprozesses lassen sich bei Parallelprojektion beschleunigen (z.b. Strahlverfolgung beim Raytracing). B. Preim AG Visualisierung Projektionen 7
.")
8 Parallelprojektionen Typische Anwendungen: Darstellung von architektonischen Modellen (Gebäuden), die im wesentlichen durch rechtwinklige Bestandteile charakterisiert sind Darstellung medizinischer Daten B. Preim AG Visualisierung Projektionen 8

9 Parallelprojektionen Seitenansicht, Vorderansicht, Draufsicht (Tafelprojektionen): Rechtwinklige Parallelprojektion, bei der Sichtebene parallel zu einer Koordinatenachse ist. Quelle: Angel (2) B. Preim AG Visualisierung Projektionen 9
 B.")
10 Parallelprojektionen Axonometrische und isometrische Projektionen: Rechtwinklige Parallelprojektion, bei die Normale der Projektionsebene (vpn) nicht parallel zu einer der Koordinatenachsen ist. Parallele Linien bleiben parallel; Winkel bleiben nicht erhalten. Isometrische Projektion: Speziallfall, bei dem der Winkel zwischen vpn und allen drei Koordinatenachsen gleich ist. Dimetrische Projektion: Winkel zwischen vpn und zwei Koordinatenachsen gleich. B. Preim AG Visualisierung Projektionen 1

11 Parallelprojektionen Beispiele für isometrische Projektionen: Isometrische und andere axonometrische Transformationen Quelle: Angel (2) Trimetrisch: Winkel zwischen vpn und allen 3 Koordinatenachsen unterschiedlich. B. Preim AG Visualisierung Projektionen 11

12 Parallelprojektionen Schräge bzw. schiefe Parallelprojektionen: Normale der Sichtebene Projektionsrichtung Besserer räumlicher Eindruck als bei rechtwinkligen Projektionen Sichtebene parallel zu einer Koordinatenebene Typische Varianten: Kavalierperspektive: Winkel zwischen DOP und Sichtebene 45 Grad Kabinettperspektive: Winkel zwischen DOP und Sichtebene 63.4 Grad (= arctan(2)), Verkürzung um 1/2 Konstruktion einer schiefen Projektion sowie Vorder- und Seitenansicht B. Preim AG Visualisierung Projektionen 12 Quelle: Angel (2)

13 Parallelprojektionen Kavalierperspektive und Kabinettperspektive: Beide sind keine perspektivischen Projektionen! Quelle: M. Haller, FH Hagenberg, (22) B. Preim AG Visualisierung Projektionen 13
 B.")
14 Parallelprojektionen Kavalierperspektive mit α= 3 Grad und α = 45 Grad Quelle: Bender/Brill (23) Kabinettperspektive mit α= 3 Grad und α = 45 Grad Quelle: Bender/Brill (23) B. Preim AG Visualisierung Projektionen 14

15 Parallelprojektionen Vergleich der Projektionsarten: 1. Rechtwinklige (orthographische) Projektion 1.1 Tafelprojektionen VPN parallel zu einer Koordinatenachse, DOP VPN Bei einem Würfel: Zeigt eine Fläche, genaue Maße, kein 3D-Eindruck 1.2 Axonometrische Parallelprojektion VPN nicht parallel zu einer Koordinatenachse, DOP VPN Bei einem Würfel: Zeigt angrenzende Flächen, keine uniforme Verkürzung 2. Schräge Parallelprojektion VPN parallel zu einer Koordinatenachse, DOP VPN Bei einem Würfel: Zeigt angrenzende Flächen, eine exakt, andere uniform verkürzt B. Preim AG Visualisierung Projektionen 15

16 Perspektivische Projektion Betrachter im COP Näher an der visuellen Wahrnehmung als Parallelprojektion Unterteilung nach der Anzahl der Fluchtpunkte (Schnittpunkte parallerer Geraden in x-, y- und z-richtung). 1, 2, 3 Quelle: Angel (2) B. Preim AG Visualisierung Projektionen 16
. 1, 2, 3 Quelle: Angel (2) B.")
17 Perspektivische Projektion B. Preim AG Visualisierung Projektionen 17

18 Perspektivische Projektion Sichtebene in Relation zu den Koordinatenachsen Quelle: M. Haller, FH Hagenberg, (22) B. Preim AG Visualisierung Projektionen 18
 B.")
19 Perspektivische Projektion Eigenschaften: Bei allen Arten perspektivische Verkürzung Parallelität von Linien und Winkel werden im allgemeinen nicht erhalten. Unterschiedliche Anzahl der Fluchtpunkte resultiert aus dem Winkel zwischen Sichtebene und den Ebenen aus je zwei Koordinatenachsen. 3 Fluchtpunkte, wenn die Projektionsebene alle Ebenen (xy, xz und yz) schneidet. 1 Fluchtpunkt, wenn Sichtebene parallel zu einer der drei Ebenen. B. Preim AG Visualisierung Projektionen 19
 schneidet.")
20 Kameramodell Reale Kamera als Orientierung und Metapher für den Viewingprozess. Parameter realer Kameras: Position Blickrichtung Brennweite Tiefenschärfe Art des Objektivs (Weitwinkel, Tele) bestimmt den Öffnungswinkel Projektionen sind teilweise nicht planar. Parameter der entstehenden Bilder: Größe (Breite, Höhe, bzw. Breite und Seitenverhältnis) Typische Werte für Seitenverhältnis: 4:3 (Fernsehen), 16:9 Auflösung B. Preim AG Visualisierung Projektionen 2

21 Kameramodell Zusammenhang zwischen Öffnungswinkel und Brennweite: Öffnungswinkel 76 Grad 67,6 Grad 56,4 Grad 41,4 Grad 24,9 Grad 15,8 Grad 1,7 Grad Brennweite 24 mm 28 mm 35 mm 5 mm 85 mm 135 mm 2 mm B. Preim AG Visualisierung Projektionen 21
22 Kameramodell In der Computergraphik wird ein vereinfachtes Kameramodell genutzt: Position Punkt (Koordinaten in 3D) Blickrichtung Vektor (Koordinaten in 3D) Bildspezifikation: Größe des Viewports in der Sichtebene (Pixel) Zusätzlich: Schnittebenen, die die dargestellte Szene auf solche Objekte begrenzen, die hinter einer ersten Ebene (near) und vor einer zweiten (far) liegen. Spezifikation als Abstände von der Kamera in Blickrichtung. Objekte, die eine Ebene schneiden, müssen geclippt werden. B. Preim AG Visualisierung Projektionen 22
23 Kameramodell Quelle: Angel (2) Blickrichtung der Kamera: z-achse Sichtebene: xy-ebene Warum die Schnittebenen? Near-Ebene verhindert, dass Objekte die sehr nahe an der Kamera sind, alles verdecken und das Objekte hinter der Kamera berücksichtigt werden. Far-Plane verhindert, dass weit entfernte und damit im Bild sehr kleine Objekte Rechenaufwand beanspruchen. B. Preim AG Visualisierung Projektionen 23
24 Kameramodell Model-View-Transformation beschreibt die Transformation zwischen Modell und der Kamera. Repräsentiert durch eine Matrix in homogenen Koordinaten. Standardwert: Einheitsmatrix Praktisch: In der Regel ist zumindest eine Verschiebung der Kamera nötig, damit diese außerhalb der Szene platziert ist. Das Modell ist normalerweise um den Ursprung angeordnet. B. Preim AG Visualisierung Projektionen 24
25 Kameramodell Bequeme Formen der Kameraspezifikation: Angabe der Kameraposition: view_reference_point (vrp) Angabe der Orientierung: view_plane_normal (vpn) Angabe der Richtung nach oben view_up-vektor (vup) v ist Projektion des vup in die Sichtebene u steht senkrecht zu v und n GKS/PHIGS: set_view_reference_point (vrp); set_view_plane_normal (vpn); set_view_up (vup); Quelle: Angel (2) Art der Perspektive wird in der Projektionsmatrix festgelegt (später). B. Preim AG Visualisierung Projektionen 25
26 Kameramodell Look-At Funktion: Kameraposition/Augpunkt: eye; Ziel: at vup kann gewählt werden. vpn = eye at vrp = eye Wahl des At -Vectors: z.b. Schwerpunkt des Modelles oder Mittelpunkt des umschließenden Quaders (für eine zentrierte Darstellung) OpenGL: glulookat (eye_x, eye_y, eye_z, at_x, at_y, at_z, up_x, up_y, up_z); Quelle: Angel (2) B. Preim AG Visualisierung Projektionen 26
27 Mathematische Beschreibung von Projektionen Zentralprojektion: Annahme, die Bildebene geht durch den Ursprung Gegeben: COP (x c,y c,z c ) und ein Punkt (x 1,y 1,z 1 ) Bild soll also auf die xy-ebene bei z= projiziert werden Projizierte Koordinaten haben die Form (x,y,) B. Preim AG Visualisierung Projektionen 27
28 Mathematische Beschreibung von Projektionen Zentralprojektion: Die Projektionsgerade für Punkt (x 1 ; y 1 ; z 1 ) kann folgendermaßen in Parameterform beschrieben werden. x = x c + (x 1 x c ) u y = y c + (y 1 y c ) u z = z c + (z 1 z c ) u B. Preim AG Visualisierung Projektionen 28
29 Mathematische Beschreibung von Projektionen Bisher: Beschreibung durch eine Matrix in homogenen Koordinaten Normalisieren B. Preim AG Visualisierung Projektionen 29
30 Mathematische Beschreibung von Projektionen Parallelprojektion: Projektionsebene sei die xy-ebene Projektionsrichtung parallel zur z-achse Projektionsrichtung parallel zum Vektor (x p ; y p ; z p ) T z p = Projektionsgerade für Punkt (x 1 ; y 1 ; z 1 ) erfüllt x = x 1 + x p u y = y 1 + y p u z = z 1 + z p u B. Preim AG Visualisierung Projektionen 3
31 Mathematische Beschreibung von Projektionen Parallelprojektion: Darstellung in homogenen Koordinaten: B. Preim AG Visualisierung Projektionen 31
32 B. Preim AG Visualisierung Projektionen 32 Mathematische Beschreibung von Projektionen Schiefwinklige/schräge Parallelprojektionen: Bild 2.26 Bender/Brill = = 1 ) tan( ) sin( 1 ) tan( ) cos( 1 1 ) sin( 1 ) tan( ) sin( 1 ) tan( ) cos( β α β α β β α β α P
33 B. Preim AG Visualisierung Projektionen 33 Mathematische Beschreibung von Projektionen Bei Kavalierprojektion: β =45 Grad Geraden in z-richtung werden nicht verkürzt, wegen cos²α + sin²α = 1 Bei Kabinettprojektion: β =63.4 Grad Geraden in z-richtung werden halbiert, wegen cos²(α/2)+sin²(α/2) = 1/2 = 1 ) sin( 1 ) cos( 1 α α P = 1 2 ) sin( 1 2 ) cos( 1 α α P
34 Implementierung von Projektionen Implementierung in OpenGL: glmatrixmode (GL_PROJECTION); glloadidentity (); Sichtkörper für Parallelprojektion in OpenGL: glortho (xmin,xmax,ymin,ymax,near,far); Unterstützt keine schrägen Projektionen! Quelle: Angel (2) B. Preim AG Visualisierung Projektionen 34
35 Implementierung von Projektionen Spezifikation einer perspektivischen Projektion Explizite Definition des View Frustums (linkes Bild) glfrustum (xmin, xmax, ymin, ymax, near, far); Definition des Winkels field of view (fov) und des Größenverhältnisses des Bildes (aspect = w/h) (rechtes Bild) glperspective (fovy, aspect, near, far); Quelle: Angel (2) B. Preim AG Visualisierung Projektionen 35
36 Zusammenfassung: Projektionen Übergang zwischen verschiedenen Koordinatensystemen (3D 2D) Projektionen sind keine affinen Transformationen; sie sind nicht umkehrbar (Parallelität von Geraden wird nicht erhalten). Ausnutzen der Eigenschaften homogener Koordinaten bei der Berechnung Mathematische Beschreibung war auf die einfachsten Projektionen (Projektionsebene = xy-ebene) konzentriert. Transformation der Kamera in Weltkoordinaten (Model-View) und Projektion werden nacheinander durchgeführt. B. Preim AG Visualisierung Projektionen 36
37 Ausblick In einigen Gebieten der Visualisierung, z.b. bei der Darstellung geographischer Daten und abstrakter Daten werden nichtlineare Projektionen genutzt. Beispiele: Fisheye-Projektionen mit einem oder mehreren Fokuspunkten zur Darstellung geographischer Daten Vorbild: Projektionen aus der Kartographie, die das Stadtzentrum (als Fokus) vergrößert darstellen. B. Preim AG Visualisierung Projektionen 37
2.2 Projektionen und Kameramodelle
 Graphikprog. GRUNDLEGENDE VERFAHREN UND TECHNIKEN. Projektionen und Kameramodelle Nachdem alle Objekte einer Szenerie mittels der besprochenen Transformationen im D-Weltkoordinatensystem platziert sind,
Graphikprog. GRUNDLEGENDE VERFAHREN UND TECHNIKEN. Projektionen und Kameramodelle Nachdem alle Objekte einer Szenerie mittels der besprochenen Transformationen im D-Weltkoordinatensystem platziert sind,
Computer Vision I. Nikos Canterakis. Lehrstuhl für Mustererkennung, Universität Freiburg
 Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 6 Endliche Kameras Die Lochkamera Die Projektive Kamera Die projektive Kamera Spalten von P Zeilen von P Hauptpunkt und Hauptachse
Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 6 Endliche Kameras Die Lochkamera Die Projektive Kamera Die projektive Kamera Spalten von P Zeilen von P Hauptpunkt und Hauptachse
3D-Computergrafik und animation. Shading und globale Beleuchtungsverfahren, Animationstechniken
 3D-Computergrafik und animation Shading und globale Beleuchtungsverfahren, Animationstechniken 1 Von 2D nach 3D Weiter: Modell für eine Sichtbeschreibung 2 Kameramodell Reale Kamera als Orientierung und
3D-Computergrafik und animation Shading und globale Beleuchtungsverfahren, Animationstechniken 1 Von 2D nach 3D Weiter: Modell für eine Sichtbeschreibung 2 Kameramodell Reale Kamera als Orientierung und
Computergraphik Grundlagen
 Computergraphik Grundlagen IV. Koordinatensysteme und geometrische Transformationen Prof. Stefan Schlechtweg Hochschule Anhalt Fachbereich Informatik Inhalt Lernziele 1. Skalare Punkte und Vektoren 2.
Computergraphik Grundlagen IV. Koordinatensysteme und geometrische Transformationen Prof. Stefan Schlechtweg Hochschule Anhalt Fachbereich Informatik Inhalt Lernziele 1. Skalare Punkte und Vektoren 2.
Die Übereckperspektive mit zwei Fluchtpunkten
 Perspektive Perspektive mit zwei Fluchtpunkten (S. 1 von 8) / www.kunstbrowser.de Die Übereckperspektive mit zwei Fluchtpunkten Bei dieser Perspektivart wird der rechtwinklige Körper so auf die Grundebene
Perspektive Perspektive mit zwei Fluchtpunkten (S. 1 von 8) / www.kunstbrowser.de Die Übereckperspektive mit zwei Fluchtpunkten Bei dieser Perspektivart wird der rechtwinklige Körper so auf die Grundebene
computer graphics & visualization
 Entwicklung und Implementierung echtzeitfähiger Verfahren zur Darstellung von reflektierenden Objekten auf GPUs echtzeitfähiger Verfahren zur Darstellung von reflektierenden Objekten auf GPUs Motivation
Entwicklung und Implementierung echtzeitfähiger Verfahren zur Darstellung von reflektierenden Objekten auf GPUs echtzeitfähiger Verfahren zur Darstellung von reflektierenden Objekten auf GPUs Motivation
Projektion. Ebene geometrische Projektionen
 Projektion - 1 - Ebene geometrische Projektionen Die ebenen geometrischen Projektionen sind dadurch charakterisiert, daß mit Projektionsstrahlen konstanter Richtung, d.h. entlang von Geraden, auf Ebenen
Projektion - 1 - Ebene geometrische Projektionen Die ebenen geometrischen Projektionen sind dadurch charakterisiert, daß mit Projektionsstrahlen konstanter Richtung, d.h. entlang von Geraden, auf Ebenen
Lineare Funktionen. 1 Proportionale Funktionen 3 1.1 Definition... 3 1.2 Eigenschaften... 3. 2 Steigungsdreieck 3
 Lineare Funktionen Inhaltsverzeichnis 1 Proportionale Funktionen 3 1.1 Definition............................... 3 1.2 Eigenschaften............................. 3 2 Steigungsdreieck 3 3 Lineare Funktionen
Lineare Funktionen Inhaltsverzeichnis 1 Proportionale Funktionen 3 1.1 Definition............................... 3 1.2 Eigenschaften............................. 3 2 Steigungsdreieck 3 3 Lineare Funktionen
www.mathe-aufgaben.com
 Abiturprüfung Mathematik Baden-Württemberg (ohne CAS) Pflichtteil Aufgaben Aufgabe : ( VP) Bilden Sie die erste Ableitung der Funktion f mit sin() f() =. Aufgabe : ( VP) Berechnen Sie das Integral ( )
Abiturprüfung Mathematik Baden-Württemberg (ohne CAS) Pflichtteil Aufgaben Aufgabe : ( VP) Bilden Sie die erste Ableitung der Funktion f mit sin() f() =. Aufgabe : ( VP) Berechnen Sie das Integral ( )
Lineare Gleichungssysteme
 Brückenkurs Mathematik TU Dresden 2015 Lineare Gleichungssysteme Schwerpunkte: Modellbildung geometrische Interpretation Lösungsmethoden Prof. Dr. F. Schuricht TU Dresden, Fachbereich Mathematik auf der
Brückenkurs Mathematik TU Dresden 2015 Lineare Gleichungssysteme Schwerpunkte: Modellbildung geometrische Interpretation Lösungsmethoden Prof. Dr. F. Schuricht TU Dresden, Fachbereich Mathematik auf der
Darstellende Geometrie Übungen. Tutorial. Übungsblatt: Perspektive - Rekonstruktion
 Darstellende Geometrie Übungen Institut für Architektur und Medien Tutorial Übungsblatt: Perspektive - Rekonstruktion Gegeben sind ein Foto von einem quaderförmigen Objekt sowie die Abmessungen des Basisrechteckes.
Darstellende Geometrie Übungen Institut für Architektur und Medien Tutorial Übungsblatt: Perspektive - Rekonstruktion Gegeben sind ein Foto von einem quaderförmigen Objekt sowie die Abmessungen des Basisrechteckes.
Computer-Graphik I Transformationen & Viewing
 lausthal Motivation omputer-raphik I Transformationen & Viewing Man möchte die virtuelle 3D Welt auf einem 2D Display darstellen. Zachmann lausthal University, ermany zach@in.tu-clausthal.de. Zachmann
lausthal Motivation omputer-raphik I Transformationen & Viewing Man möchte die virtuelle 3D Welt auf einem 2D Display darstellen. Zachmann lausthal University, ermany zach@in.tu-clausthal.de. Zachmann
Hinweise zur Kalibrierung von Kameras mit einer AICON Kalibriertafel
 Hinweise zur Kalibrierung von Kameras mit einer AICON Kalibriertafel AICON 3D Systems GmbH Celler Straße 32 D-38114 Braunschweig Telefon: +49 (0) 5 31 58 000 58 Fax: +49 (0) 5 31 58 000 60 Email: info@aicon.de
Hinweise zur Kalibrierung von Kameras mit einer AICON Kalibriertafel AICON 3D Systems GmbH Celler Straße 32 D-38114 Braunschweig Telefon: +49 (0) 5 31 58 000 58 Fax: +49 (0) 5 31 58 000 60 Email: info@aicon.de
www.mathe-aufgaben.com
 Abiturprüfung Mathematik 008 Baden-Württemberg (ohne CAS) Pflichtteil Aufgaben Aufgabe 1: ( VP) x Gegeben ist die Funktion f mit f(x). x Bilden Sie die Ableitung von f und fassen Sie diese so weit wie
Abiturprüfung Mathematik 008 Baden-Württemberg (ohne CAS) Pflichtteil Aufgaben Aufgabe 1: ( VP) x Gegeben ist die Funktion f mit f(x). x Bilden Sie die Ableitung von f und fassen Sie diese so weit wie
Erinnerung. Arbeitsschritte der Computergraphik. Modellierung. Animation. Rendering. Ausgabemedium. Generierung
 Erinnerung Arbeitsschritte der Computergraphik Modellierung Animation Generierung Ausgabemedium Graphik/-Pipeline Wandelt die Beschreibung einer Szene im dreidimensionalen Raum in eine zweidimensionale
Erinnerung Arbeitsschritte der Computergraphik Modellierung Animation Generierung Ausgabemedium Graphik/-Pipeline Wandelt die Beschreibung einer Szene im dreidimensionalen Raum in eine zweidimensionale
Wir gehen aus von euklidischen Anschauungsraum bzw. von der euklidischen Zeichenebene. Parallele Geraden schneiden einander nicht.
 2 Ein wenig projektive Geometrie 2.1 Fernpunkte 2.1.1 Projektive Einführung von Fernpunkten Wir gehen aus von euklidischen Anschauungsraum bzw. von der euklidischen Zeichenebene. Parallele Geraden schneiden
2 Ein wenig projektive Geometrie 2.1 Fernpunkte 2.1.1 Projektive Einführung von Fernpunkten Wir gehen aus von euklidischen Anschauungsraum bzw. von der euklidischen Zeichenebene. Parallele Geraden schneiden
Welche Lagen können zwei Geraden (im Raum) zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen?
 zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen?") Welche Lagen können zwei Geraden (im Raum) zueinander haben? Welche Lagen können zwei Ebenen (im Raum) zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen? Wie heiÿt
Welche Lagen können zwei Geraden (im Raum) zueinander haben? Welche Lagen können zwei Ebenen (im Raum) zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen? Wie heiÿt
Abituraufgabe zur analytischen Geometrie, Hessen 2013, B2, Grundkurs (TR)
") Abituraufgabe zur analytischen Geometrie, Hessen 2013, B2, Grundkurs (TR) 1 Bei Ausgrabungen wurden die Überreste einer 4500 Jahre alten Pyramide entdeckt. Die Abbildung zeigt die Ansicht der Pyramidenruine
Abituraufgabe zur analytischen Geometrie, Hessen 2013, B2, Grundkurs (TR) 1 Bei Ausgrabungen wurden die Überreste einer 4500 Jahre alten Pyramide entdeckt. Die Abbildung zeigt die Ansicht der Pyramidenruine
4. Kapitel 3D Engine Geometry
 15.11.2007 Mathematics for 3D Game Programming & Computer Graphics 4. Kapitel 3D Engine Geometry Anne Adams & Katharina Schmitt Universität Trier Fachbereich IV Proseminar Numerik Wintersemester 2007/08
15.11.2007 Mathematics for 3D Game Programming & Computer Graphics 4. Kapitel 3D Engine Geometry Anne Adams & Katharina Schmitt Universität Trier Fachbereich IV Proseminar Numerik Wintersemester 2007/08
Geometrische Optik. Ausserdem gilt sin ϕ = y R. Einsetzen in die Gleichung für die Brennweite ergibt unmittelbar: 1 2 1 sin 2 ϕ
 Geometrische Optik GO: 2 Leiten Sie für einen Hohlspiegel die Abhängigkeit der Brennweite vom Achsabstand des einfallenden Strahls her (f = f(y))! Musterlösung: Für die Brennweite des Hohlspiegels gilt:
Geometrische Optik GO: 2 Leiten Sie für einen Hohlspiegel die Abhängigkeit der Brennweite vom Achsabstand des einfallenden Strahls her (f = f(y))! Musterlösung: Für die Brennweite des Hohlspiegels gilt:
Zeichen bei Zahlen entschlüsseln
 Zeichen bei Zahlen entschlüsseln In diesem Kapitel... Verwendung des Zahlenstrahls Absolut richtige Bestimmung von absoluten Werten Operationen bei Zahlen mit Vorzeichen: Addieren, Subtrahieren, Multiplizieren
Zeichen bei Zahlen entschlüsseln In diesem Kapitel... Verwendung des Zahlenstrahls Absolut richtige Bestimmung von absoluten Werten Operationen bei Zahlen mit Vorzeichen: Addieren, Subtrahieren, Multiplizieren
Bei Konstruktionen dürfen nur die folgenden Schritte durchgeführt werden : Beliebigen Punkt auf einer Geraden, Strecke oder Kreislinie zeichnen.
 Geometrie I. Zeichnen und Konstruieren ================================================================== 1.1 Der Unterschied zwischen Zeichnen und Konstruieren Bei der Konstruktion einer geometrischen
Geometrie I. Zeichnen und Konstruieren ================================================================== 1.1 Der Unterschied zwischen Zeichnen und Konstruieren Bei der Konstruktion einer geometrischen
Mathematik 1: (ohne Taschenrechner) Korrekturanleitung. Kanton St.Gallen Bildungsdepartement. BMS/FMS/WMS/WMI Aufnahmeprüfung Frühling 2015
 Korrekturanleitung. Kanton St.Gallen Bildungsdepartement. BMS/FMS/WMS/WMI Aufnahmeprüfung Frühling 2015") Kanton St.Gallen Bildungsdepartement BMS/FMS/WMS/WMI Aufnahmeprüfung Frühling 2015 Mathematik 1: (ohne Taschenrechner) Korrekturanleitung Die Korrekturanleitung legt die Verteilung der Punkte auf die einzelnen
Kanton St.Gallen Bildungsdepartement BMS/FMS/WMS/WMI Aufnahmeprüfung Frühling 2015 Mathematik 1: (ohne Taschenrechner) Korrekturanleitung Die Korrekturanleitung legt die Verteilung der Punkte auf die einzelnen
6.2 Scan-Konvertierung (Scan Conversion)
") 6.2 Scan-Konvertierung (Scan Conversion) Scan-Konvertierung ist die Rasterung von einfachen Objekten (Geraden, Kreisen, Kurven). Als Ausgabemedium dient meist der Bildschirm, der aus einem Pixelraster
6.2 Scan-Konvertierung (Scan Conversion) Scan-Konvertierung ist die Rasterung von einfachen Objekten (Geraden, Kreisen, Kurven). Als Ausgabemedium dient meist der Bildschirm, der aus einem Pixelraster
Computer Vision I. Nikos Canterakis. Lehrstuhl für Mustererkennung, Universität Freiburg,
 Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg, Literatur Richard Hartle and Andrew Zisserman. Multiple View Geometr in computer vision, Cambridge Universit Press, 2 nd Ed., 23. O.D.
Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg, Literatur Richard Hartle and Andrew Zisserman. Multiple View Geometr in computer vision, Cambridge Universit Press, 2 nd Ed., 23. O.D.
Graphische Datenverarbeitung und Bildverarbeitung
 Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Clippen in 2D und 3D Graphische DV und BV, Regina Pohle, 19. Clippen in 2D und 3D 1 Einordnung in die Inhalte der Vorlesung Einführung
Graphische Datenverarbeitung und Bildverarbeitung Hochschule Niederrhein Clippen in 2D und 3D Graphische DV und BV, Regina Pohle, 19. Clippen in 2D und 3D 1 Einordnung in die Inhalte der Vorlesung Einführung
Computer Graphik. Mitschrift von www.kuertz.name
 Computer Graphik Mitschrift von www.kuertz.name Hinweis: Dies ist kein offizielles Script, sondern nur eine private Mitschrift. Die Mitschriften sind teweilse unvollständig, falsch oder inaktuell, da sie
Computer Graphik Mitschrift von www.kuertz.name Hinweis: Dies ist kein offizielles Script, sondern nur eine private Mitschrift. Die Mitschriften sind teweilse unvollständig, falsch oder inaktuell, da sie
Sichere E-Mail Anleitung Zertifikate / Schlüssel für Kunden der Sparkasse Germersheim-Kandel. Sichere E-Mail. der
 Sichere E-Mail der Nutzung von Zertifikaten / Schlüsseln zur sicheren Kommunikation per E-Mail mit der Sparkasse Germersheim-Kandel Inhalt: 1. Voraussetzungen... 2 2. Registrierungsprozess... 2 3. Empfang
Sichere E-Mail der Nutzung von Zertifikaten / Schlüsseln zur sicheren Kommunikation per E-Mail mit der Sparkasse Germersheim-Kandel Inhalt: 1. Voraussetzungen... 2 2. Registrierungsprozess... 2 3. Empfang
:= Modellabbildung. Bildsynthese (Rendering) Bildsynthese
 Bildsynthese") Geometrisches Modell bestehend aus Datenstrukturen zur Verknüpfung geometrischer Primitive, welche eine Gesamtszene beschreiben Bildsynthese := Modellabbildung Pixelbasiertes Modell zur Darstellung eines
Geometrisches Modell bestehend aus Datenstrukturen zur Verknüpfung geometrischer Primitive, welche eine Gesamtszene beschreiben Bildsynthese := Modellabbildung Pixelbasiertes Modell zur Darstellung eines
Abiturprüfung Mathematik 2008 (Baden-Württemberg) Berufliche Gymnasien ohne TG Analysis, Aufgabe 1
 Berufliche Gymnasien ohne TG Analysis, Aufgabe 1") Abiturprüfung Mathematik (Baden-Württemberg) Berufliche Gymnasien ohne TG Analysis, Aufgabe Für jedes t f t () + t R ist die Funktion f t gegeben durch = mit R. Das Schaubild von f t heißt K t.. (6 Punkte)
Abiturprüfung Mathematik (Baden-Württemberg) Berufliche Gymnasien ohne TG Analysis, Aufgabe Für jedes t f t () + t R ist die Funktion f t gegeben durch = mit R. Das Schaubild von f t heißt K t.. (6 Punkte)
Abitur - Grundkurs Mathematik. Sachsen-Anhalt 2002. Gebiet G1 - Analysis
 Abitur - Grundkurs Mathematik Sachsen-Anhalt Gebiet G - Analsis Aufgabe.. Der Graph einer ganzrationalen Funktion f dritten Grades mit einer Funktionsgleichung der Form f a b c d a,b,c,d, R schneidet die
Abitur - Grundkurs Mathematik Sachsen-Anhalt Gebiet G - Analsis Aufgabe.. Der Graph einer ganzrationalen Funktion f dritten Grades mit einer Funktionsgleichung der Form f a b c d a,b,c,d, R schneidet die
Advanced Rendering Interior Szene
 Advanced Rendering Interior Szene in Cinema 4D 11-11.5 Als erstes, sollten Sie ihre Szene in Cinema 4D öffnen. vergewissern sie sich, ob alle Licht quellen die evtl. mit importiert wurden, aus der Szene
Advanced Rendering Interior Szene in Cinema 4D 11-11.5 Als erstes, sollten Sie ihre Szene in Cinema 4D öffnen. vergewissern sie sich, ob alle Licht quellen die evtl. mit importiert wurden, aus der Szene
Lösung. Prüfungsteil 1: Aufgabe 1
 Zentrale Prüfung 01 Lösung Diese Lösung wurde erstellt von Cornelia Sanzenbacher. Sie ist keine offizielle Lösung des Ministeriums für Schule und Weiterbildung des Landes. Prüfungsteil 1: Aufgabe 1 a)
Zentrale Prüfung 01 Lösung Diese Lösung wurde erstellt von Cornelia Sanzenbacher. Sie ist keine offizielle Lösung des Ministeriums für Schule und Weiterbildung des Landes. Prüfungsteil 1: Aufgabe 1 a)
1 Mathematische Grundlagen
 Mathematische Grundlagen - 1-1 Mathematische Grundlagen Der Begriff der Menge ist einer der grundlegenden Begriffe in der Mathematik. Mengen dienen dazu, Dinge oder Objekte zu einer Einheit zusammenzufassen.
Mathematische Grundlagen - 1-1 Mathematische Grundlagen Der Begriff der Menge ist einer der grundlegenden Begriffe in der Mathematik. Mengen dienen dazu, Dinge oder Objekte zu einer Einheit zusammenzufassen.
Vermessung und Verständnis von FFT Bildern
 Vermessung und Verständnis von FFT Bildern Viele Auswertungen basieren auf der "Fast Fourier Transformation" FFT um die (ungewünschten) Regelmäßigkeiten im Schliffbild darzustellen. Die Fourier-Transformation
Vermessung und Verständnis von FFT Bildern Viele Auswertungen basieren auf der "Fast Fourier Transformation" FFT um die (ungewünschten) Regelmäßigkeiten im Schliffbild darzustellen. Die Fourier-Transformation
5. Lineare Funktionen
 5. Lineare Funktionen Lernziele: -Eine lineare Funktion grafisch darstellen -Geradengleichung (Funktionsgleichung einer linearen Funktion) -Deutung von k- und d-wert -Grafische Lösung von Gleichungssystemen
5. Lineare Funktionen Lernziele: -Eine lineare Funktion grafisch darstellen -Geradengleichung (Funktionsgleichung einer linearen Funktion) -Deutung von k- und d-wert -Grafische Lösung von Gleichungssystemen
Die Näherung durch die Sekante durch die Punkte A und C ist schlechter, da der Punkt C weiter von A entfernt liegt.
 LÖSUNGEN TEIL 1 Arbeitszeit: 50 min Gegeben ist die Funktion f mit der Gleichung. Begründen Sie, warum die Steigung der Sekante durch die Punkte A(0 2) und C(3 11) eine weniger gute Näherung für die Tangentensteigung
LÖSUNGEN TEIL 1 Arbeitszeit: 50 min Gegeben ist die Funktion f mit der Gleichung. Begründen Sie, warum die Steigung der Sekante durch die Punkte A(0 2) und C(3 11) eine weniger gute Näherung für die Tangentensteigung
Lichtbrechung an Linsen
 Sammellinsen Lichtbrechung an Linsen Fällt ein paralleles Lichtbündel auf eine Sammellinse, so werden die Lichtstrahlen so gebrochen, dass sie durch einen Brennpunkt der Linse verlaufen. Der Abstand zwischen
Sammellinsen Lichtbrechung an Linsen Fällt ein paralleles Lichtbündel auf eine Sammellinse, so werden die Lichtstrahlen so gebrochen, dass sie durch einen Brennpunkt der Linse verlaufen. Der Abstand zwischen
Mathematik 1: (ohne Taschenrechner) Korrekturanleitung
 Korrekturanleitung") Kanton St.Gallen Bildungsdepartement St.Gallische Kantonsschulen Gymnasium Aufnahmeprüfung 013 Mathematik 1: (ohne Taschenrechner) Korrekturanleitung Löse die Aufgaben auf diesen Blättern. Der Lösungsweg
Kanton St.Gallen Bildungsdepartement St.Gallische Kantonsschulen Gymnasium Aufnahmeprüfung 013 Mathematik 1: (ohne Taschenrechner) Korrekturanleitung Löse die Aufgaben auf diesen Blättern. Der Lösungsweg
T Nach- bzw. Wiederholungsprüfung:
 Schriftliche Abschlussprüfung an Fachoberschulen/ Prüfung zum Erwerb der Fachhochschulreife in beruflichen Bildungsgängen im Schuljahr 00/0 Hauptprüfung: Nach- bzw. Wiederholungsprüfung: 0.0.0 Schularten:
Schriftliche Abschlussprüfung an Fachoberschulen/ Prüfung zum Erwerb der Fachhochschulreife in beruflichen Bildungsgängen im Schuljahr 00/0 Hauptprüfung: Nach- bzw. Wiederholungsprüfung: 0.0.0 Schularten:
Nachhilfe-Kurs Mathematik Klasse 13 Freie Waldorfschule Mitte
 Nachhilfe-Kurs Mathematik Klasse 13 Freie Waldorfschule Mitte März 2008 Zusammenfassung IB 1. Lagebeziehungen zwischen geometrischen Objekten 1.1 Punkt-Gerade Ein Punkt kann entweder auf einer gegebenen
Nachhilfe-Kurs Mathematik Klasse 13 Freie Waldorfschule Mitte März 2008 Zusammenfassung IB 1. Lagebeziehungen zwischen geometrischen Objekten 1.1 Punkt-Gerade Ein Punkt kann entweder auf einer gegebenen
AGROPLUS Buchhaltung. Daten-Server und Sicherheitskopie. Version vom 21.10.2013b
 AGROPLUS Buchhaltung Daten-Server und Sicherheitskopie Version vom 21.10.2013b 3a) Der Daten-Server Modus und der Tresor Der Daten-Server ist eine Betriebsart welche dem Nutzer eine grosse Flexibilität
AGROPLUS Buchhaltung Daten-Server und Sicherheitskopie Version vom 21.10.2013b 3a) Der Daten-Server Modus und der Tresor Der Daten-Server ist eine Betriebsart welche dem Nutzer eine grosse Flexibilität
Das Mathematikabitur. Abiturvorbereitung Geometrie. Autor: Claus Deser Abiturvorbereitung Mathematik 1
 Das Mathematikabitur Abiturvorbereitung Geometrie Autor: Claus Deser Abiturvorbereitung Mathematik 1 Gliederung Was sind Vektoren/ ein Vektorraum? Wie misst man Abstände und Winkel? Welche geometrischen
Das Mathematikabitur Abiturvorbereitung Geometrie Autor: Claus Deser Abiturvorbereitung Mathematik 1 Gliederung Was sind Vektoren/ ein Vektorraum? Wie misst man Abstände und Winkel? Welche geometrischen
Darstellungsformen einer Funktion
 http://www.flickr.com/photos/sigfrid/348144517/ Darstellungsformen einer Funktion 9 Analytische Darstellung: Eplizite Darstellung Funktionen werden nach Möglichkeit eplizit dargestellt, das heißt, die
http://www.flickr.com/photos/sigfrid/348144517/ Darstellungsformen einer Funktion 9 Analytische Darstellung: Eplizite Darstellung Funktionen werden nach Möglichkeit eplizit dargestellt, das heißt, die
Mathematische Grundlagen
 Mathematische Grundlagen Oliver Deussen Mathematische Grundlagen 1 Affine Räume um Zeichenebene bzw. Raum zu beschreiben, muß vorher ein Koordinatensystem festgelegt werden durch geometrische Fragestellungen
Mathematische Grundlagen Oliver Deussen Mathematische Grundlagen 1 Affine Räume um Zeichenebene bzw. Raum zu beschreiben, muß vorher ein Koordinatensystem festgelegt werden durch geometrische Fragestellungen
Gitterherstellung und Polarisation
 Versuch 1: Gitterherstellung und Polarisation Bei diesem Versuch wollen wir untersuchen wie man durch Überlagerung von zwei ebenen Wellen Gttterstrukturen erzeugen kann. Im zweiten Teil wird die Sichtbarkeit
Versuch 1: Gitterherstellung und Polarisation Bei diesem Versuch wollen wir untersuchen wie man durch Überlagerung von zwei ebenen Wellen Gttterstrukturen erzeugen kann. Im zweiten Teil wird die Sichtbarkeit
Zusammenhänge zwischen metrischen Merkmalen
 Zusammenhänge zwischen metrischen Merkmalen Darstellung des Zusammenhangs, Korrelation und Regression Daten liegen zu zwei metrischen Merkmalen vor: Datenpaare (x i, y i ), i = 1,..., n Beispiel: x: Anzahl
Zusammenhänge zwischen metrischen Merkmalen Darstellung des Zusammenhangs, Korrelation und Regression Daten liegen zu zwei metrischen Merkmalen vor: Datenpaare (x i, y i ), i = 1,..., n Beispiel: x: Anzahl
LU-Zerlegung. Zusätze zum Gelben Rechenbuch. Peter Furlan. Verlag Martina Furlan. Inhaltsverzeichnis. 1 Definitionen.
 Zusätze zum Gelben Rechenbuch LU-Zerlegung Peter Furlan Verlag Martina Furlan Inhaltsverzeichnis Definitionen 2 (Allgemeine) LU-Zerlegung 2 3 Vereinfachte LU-Zerlegung 3 4 Lösung eines linearen Gleichungssystems
Zusätze zum Gelben Rechenbuch LU-Zerlegung Peter Furlan Verlag Martina Furlan Inhaltsverzeichnis Definitionen 2 (Allgemeine) LU-Zerlegung 2 3 Vereinfachte LU-Zerlegung 3 4 Lösung eines linearen Gleichungssystems
Grundlagen geometrisches Zeichnen - CAD. E1: Grundlagen des geometrischen Zeichnens (14)
") : des geometrischen Zeichnens (14) Die Schüler lernen die Skizze als wich2ge Voraussetzung zur Analyse und Modellierung konstruk2ver Problemstellungen kennen. Dabei eignen sie sich die des geometrischen
: des geometrischen Zeichnens (14) Die Schüler lernen die Skizze als wich2ge Voraussetzung zur Analyse und Modellierung konstruk2ver Problemstellungen kennen. Dabei eignen sie sich die des geometrischen
Zwei Aufgaben, die auf windschiefe Regelflächen führen,
 Zwei Aufgaben, die auf windschiefe Regelflächen führen, von À. KIEFER (Zürich). (Als Manuskript eingegangen am 25. Januar 1926.) I. Gesucht im Raum der Ort des Punktes, von dem aus die Zentralprojektionen
Zwei Aufgaben, die auf windschiefe Regelflächen führen, von À. KIEFER (Zürich). (Als Manuskript eingegangen am 25. Januar 1926.) I. Gesucht im Raum der Ort des Punktes, von dem aus die Zentralprojektionen
PO Doppelbrechung und elliptisch polarisiertes Licht
 PO Doppelbrechung und elliptisch polarisiertes Licht Blockpraktikum Herbst 27 (Gruppe 2b) 24. Oktober 27 Inhaltsverzeichnis 1 Grundlagen 2 1.1 Polarisation.................................. 2 1.2 Brechung...................................
PO Doppelbrechung und elliptisch polarisiertes Licht Blockpraktikum Herbst 27 (Gruppe 2b) 24. Oktober 27 Inhaltsverzeichnis 1 Grundlagen 2 1.1 Polarisation.................................. 2 1.2 Brechung...................................
Definition und Begriffe
 Merkblatt: Das Dreieck Definition und Begriffe Das Dreieck ist ein Vieleck. In der Ebene ist es die einfachste Figur, die von geraden Linien begrenzt wird. Ecken: Jedes Dreieck hat drei Ecken, die meist
Merkblatt: Das Dreieck Definition und Begriffe Das Dreieck ist ein Vieleck. In der Ebene ist es die einfachste Figur, die von geraden Linien begrenzt wird. Ecken: Jedes Dreieck hat drei Ecken, die meist
Objektive. Auswahl und Montage. Inhalt
 Objektive Auswahl und Montage Im Folgenden geben wir Ihnen allgemeine Hinweise zur Auswahl und Montage von C- und Objektiven. Weitere Informationen finden Sie im White Paper Optik-Grundlagen. Bitte beachten
Objektive Auswahl und Montage Im Folgenden geben wir Ihnen allgemeine Hinweise zur Auswahl und Montage von C- und Objektiven. Weitere Informationen finden Sie im White Paper Optik-Grundlagen. Bitte beachten
Info zum Zusammenhang von Auflösung und Genauigkeit
 Da es oft Nachfragen und Verständnisprobleme mit den oben genannten Begriffen gibt, möchten wir hier versuchen etwas Licht ins Dunkel zu bringen. Nehmen wir mal an, Sie haben ein Stück Wasserrohr mit der
Da es oft Nachfragen und Verständnisprobleme mit den oben genannten Begriffen gibt, möchten wir hier versuchen etwas Licht ins Dunkel zu bringen. Nehmen wir mal an, Sie haben ein Stück Wasserrohr mit der
Mathematik I Prüfung für den Übertritt aus der 9. Klasse
 Aufnahmeprüfung 015 für den Eintritt in das 9. Schuljahr eines Gymnasiums des Kantons Bern Mathematik I Prüfung für den Übertritt aus der 9. Klasse Bitte beachten: - Bearbeitungsdauer: 60 Minuten - Alle
Aufnahmeprüfung 015 für den Eintritt in das 9. Schuljahr eines Gymnasiums des Kantons Bern Mathematik I Prüfung für den Übertritt aus der 9. Klasse Bitte beachten: - Bearbeitungsdauer: 60 Minuten - Alle
Güte von Tests. die Wahrscheinlichkeit für den Fehler 2. Art bei der Testentscheidung, nämlich. falsch ist. Darauf haben wir bereits im Kapitel über
 Güte von s Grundlegendes zum Konzept der Güte Ableitung der Gütefunktion des Gauss im Einstichprobenproblem Grafische Darstellung der Gütefunktionen des Gauss im Einstichprobenproblem Ableitung der Gütefunktion
Güte von s Grundlegendes zum Konzept der Güte Ableitung der Gütefunktion des Gauss im Einstichprobenproblem Grafische Darstellung der Gütefunktionen des Gauss im Einstichprobenproblem Ableitung der Gütefunktion
Über den Zusammenhang zwischen geometrischer Parallaxe und der Entfernung des Mondes
 Über den Zusammenhang zwischen geometrischer Parallaxe und der Entfernung des Mondes U. Backhaus Universität Duisburg-Essen Wenn man ein entferntes Objekt von verschiedenen Orten aus anpeilt, dann unterscheiden
Über den Zusammenhang zwischen geometrischer Parallaxe und der Entfernung des Mondes U. Backhaus Universität Duisburg-Essen Wenn man ein entferntes Objekt von verschiedenen Orten aus anpeilt, dann unterscheiden
Geometrische Optik. Beschreibung der Propagation durch Richtung der k-vektoren ( Lichtstrahlen )
") Geometrische Optik Beschreibung der Propagation durch Richtung der k-vektoren ( Lichtstrahlen ) k - Vektoren zeigen zu Wellenfronten für Ausdehnung D von Strukturen, die zu geometrischer Eingrenzung führen
Geometrische Optik Beschreibung der Propagation durch Richtung der k-vektoren ( Lichtstrahlen ) k - Vektoren zeigen zu Wellenfronten für Ausdehnung D von Strukturen, die zu geometrischer Eingrenzung führen
SCHRITT 1: Öffnen des Bildes und Auswahl der Option»Drucken«im Menü»Datei«...2. SCHRITT 2: Angeben des Papierformat im Dialog»Drucklayout«...
 Drucken - Druckformat Frage Wie passt man Bilder beim Drucken an bestimmte Papierformate an? Antwort Das Drucken von Bildern ist mit der Druckfunktion von Capture NX sehr einfach. Hier erklären wir, wie
Drucken - Druckformat Frage Wie passt man Bilder beim Drucken an bestimmte Papierformate an? Antwort Das Drucken von Bildern ist mit der Druckfunktion von Capture NX sehr einfach. Hier erklären wir, wie
Die Größe von Flächen vergleichen
 Vertiefen 1 Die Größe von Flächen vergleichen zu Aufgabe 1 Schulbuch, Seite 182 1 Wer hat am meisten Platz? Ordne die Figuren nach ihrem Flächeninhalt. Begründe deine Reihenfolge. 1 2 3 4 zu Aufgabe 2
Vertiefen 1 Die Größe von Flächen vergleichen zu Aufgabe 1 Schulbuch, Seite 182 1 Wer hat am meisten Platz? Ordne die Figuren nach ihrem Flächeninhalt. Begründe deine Reihenfolge. 1 2 3 4 zu Aufgabe 2
Die Gleichung A x = a hat für A 0 die eindeutig bestimmte Lösung. Für A=0 und a 0 existiert keine Lösung.
 Lineare Gleichungen mit einer Unbekannten Die Grundform der linearen Gleichung mit einer Unbekannten x lautet A x = a Dabei sind A, a reelle Zahlen. Die Gleichung lösen heißt, alle reellen Zahlen anzugeben,
Lineare Gleichungen mit einer Unbekannten Die Grundform der linearen Gleichung mit einer Unbekannten x lautet A x = a Dabei sind A, a reelle Zahlen. Die Gleichung lösen heißt, alle reellen Zahlen anzugeben,
Einbau bzw. Umbau einer USB-Schnittstelle für das Testboard TB1 nicht nur für il-troll
 Einbau bzw. Umbau einer USB-Schnittstelle für das Testboard TB1 nicht nur für il-troll Lesen Sie bitte bevor Sie mit dem Umbau beginnen dieses Dokument sorgfältig durch. Version 1.0 Juli 2010 WH Seite
Einbau bzw. Umbau einer USB-Schnittstelle für das Testboard TB1 nicht nur für il-troll Lesen Sie bitte bevor Sie mit dem Umbau beginnen dieses Dokument sorgfältig durch. Version 1.0 Juli 2010 WH Seite
Grundregeln der Perspektive und ihre elementargeometrische Herleitung
 Vortrag zu Mathematik, Geometrie und Perspektive von Prof. Dr. Bodo Pareigis am 15.10.2007 im Vorlesungszyklus Naturwissenschaften und Mathematische Wissenschaften im Rahmen des Seniorenstudiums der LMU.
Vortrag zu Mathematik, Geometrie und Perspektive von Prof. Dr. Bodo Pareigis am 15.10.2007 im Vorlesungszyklus Naturwissenschaften und Mathematische Wissenschaften im Rahmen des Seniorenstudiums der LMU.
Übungsaufgaben Klasse 7
 Übungsaufgaben Klasse 7 2. Oktober 2006 Dreieckskonstruktion Versuche erst, alle Aufgaben zu lösen. Die Lösungen findest du ab Montag auf: http://www.hagener-berg.de/serdar/ unter dem Punkt Schulinfos.
Übungsaufgaben Klasse 7 2. Oktober 2006 Dreieckskonstruktion Versuche erst, alle Aufgaben zu lösen. Die Lösungen findest du ab Montag auf: http://www.hagener-berg.de/serdar/ unter dem Punkt Schulinfos.
Text-Bild-Link-Editor
 Reihe TextGrid-Tutorials Text-Bild-Link-Editor Arbeiten mit Verknüpfungen Mit dem Text-Bild-Link-Editor können Textsegmente mit Bildausschnitten verknüpft werden. Eine typische Anwendung ist die Verknüpfung
Reihe TextGrid-Tutorials Text-Bild-Link-Editor Arbeiten mit Verknüpfungen Mit dem Text-Bild-Link-Editor können Textsegmente mit Bildausschnitten verknüpft werden. Eine typische Anwendung ist die Verknüpfung
TEST Basiswissen Mathematik für Ingenieurstudiengänge
 TEST Basiswissen Mathematik für Ingenieurstudiengänge Erste Fassung März 2013 Dieser Test beinhaltet Aufgaben zu den wesentlichen Themen im Bereich Mathematik, die Basiswissen für ein Ingenieurstudium
TEST Basiswissen Mathematik für Ingenieurstudiengänge Erste Fassung März 2013 Dieser Test beinhaltet Aufgaben zu den wesentlichen Themen im Bereich Mathematik, die Basiswissen für ein Ingenieurstudium
Instrumenten- Optik. Mikroskop
 Instrumenten- Optik Mikroskop Gewerblich-Industrielle Berufsschule Bern Augenoptikerinnen und Augenoptiker Der mechanische Aufbau Die einzelnen mechanischen Bauteile eines Mikroskops bezeichnen und deren
Instrumenten- Optik Mikroskop Gewerblich-Industrielle Berufsschule Bern Augenoptikerinnen und Augenoptiker Der mechanische Aufbau Die einzelnen mechanischen Bauteile eines Mikroskops bezeichnen und deren
R. Brinkmann http://brinkmann-du.de Seite 1 30.11.2013 Schriftliche Übung Mathematik Stochastik II (Nachschreiber) Jan. 2007
 Jan. 2007") R. Brinkmann http://brinkmann-du.de Seite 1 30.11.2013 Schriftliche Übung Mathematik Stochastik II (Nachschreiber) Jan. 2007 SG15/25D NAME: Lösungen 1. In einer Packung sind Glühbirnen, davon sind zwei
R. Brinkmann http://brinkmann-du.de Seite 1 30.11.2013 Schriftliche Übung Mathematik Stochastik II (Nachschreiber) Jan. 2007 SG15/25D NAME: Lösungen 1. In einer Packung sind Glühbirnen, davon sind zwei
FLASH IMAGESLIDER PROFESSIONELL 4
 FLASH IMAGESLIDER PROFESSIONELL 4 ANLEITUNG, PARAMETERBESCHREIBUNG, HINWEISE UND ERKLÄRUNGEN Version 2.0 - August 2011 Mark Kirstein, sector12 PARAMETERBESCHREIBUNG In diesem Bereich sind alle Parameter
FLASH IMAGESLIDER PROFESSIONELL 4 ANLEITUNG, PARAMETERBESCHREIBUNG, HINWEISE UND ERKLÄRUNGEN Version 2.0 - August 2011 Mark Kirstein, sector12 PARAMETERBESCHREIBUNG In diesem Bereich sind alle Parameter
Zahnröntgenaufnahmen
 Zahnröntgenaufnahmen Eine unverzichtbare, da sehr aussagekräftige Form der Befunderhebung in der Tierzahnmedizin ist das intraorale dentale Röntgen zur Erstellung von Einzelzahnröntgenaufnahmen. Unabhängig
Zahnröntgenaufnahmen Eine unverzichtbare, da sehr aussagekräftige Form der Befunderhebung in der Tierzahnmedizin ist das intraorale dentale Röntgen zur Erstellung von Einzelzahnröntgenaufnahmen. Unabhängig
Vektoren mit GeoGebra
 Vektoren mit GeoGebra Eine Kurzanleitung mit Beispielen Markus Hohenwarter, 2005 In GeoGebra kann mit Vektoren und Punkten konstruiert und gerechnet werden. Diese Kurzanleitung gibt einen Überblick über
Vektoren mit GeoGebra Eine Kurzanleitung mit Beispielen Markus Hohenwarter, 2005 In GeoGebra kann mit Vektoren und Punkten konstruiert und gerechnet werden. Diese Kurzanleitung gibt einen Überblick über
Handout 6. Entwicklung von Makros
 Handout 6 Entwicklung von Makros Cinderella kann eine Sequenz von Konstruktionsbefehlen aufzeichnen und sie als neues Werkzeug speichern. Dies bezeichnet man als Makro-Konstruktion. Mit diesen Aufgaben
Handout 6 Entwicklung von Makros Cinderella kann eine Sequenz von Konstruktionsbefehlen aufzeichnen und sie als neues Werkzeug speichern. Dies bezeichnet man als Makro-Konstruktion. Mit diesen Aufgaben
- 2 - AP WS 10M. 1 Finanzmathematik Punkte
 - 2 - AP WS 10M 1 Finanzmathematik Punkte Frau Werner hat vor einigen Jahren bei einer Versicherungsgesellschaft einen Vertrag für eine Lebensversicherung abgeschlossen. Am Ende der Laufzeit dieser Versicherung
- 2 - AP WS 10M 1 Finanzmathematik Punkte Frau Werner hat vor einigen Jahren bei einer Versicherungsgesellschaft einen Vertrag für eine Lebensversicherung abgeschlossen. Am Ende der Laufzeit dieser Versicherung
MATHEMATIK 3 STUNDEN. DATUM: 8. Juni 2009
 EUROPÄISCHES ABITUR 2009 MATHEMATIK 3 STUNDEN DATUM: 8. Juni 2009 DAUER DES EXAMENS : 3 Stunden (180 Minuten) ZUGELASSENE HILFSMITTEL : Europäische Formelsammlung Nicht graphischer und nicht programmierbarer
EUROPÄISCHES ABITUR 2009 MATHEMATIK 3 STUNDEN DATUM: 8. Juni 2009 DAUER DES EXAMENS : 3 Stunden (180 Minuten) ZUGELASSENE HILFSMITTEL : Europäische Formelsammlung Nicht graphischer und nicht programmierbarer
Virtuelle Fotografie (CGI)
") (CGI) Vorteile und Beispiele Das ist (k)ein Foto. Diese Abbildung ist nicht mit einer Kamera erstellt worden. Was Sie sehen basiert auf CAD-Daten unserer Kunden. Wir erzeugen damit Bilder ausschließlich
(CGI) Vorteile und Beispiele Das ist (k)ein Foto. Diese Abbildung ist nicht mit einer Kamera erstellt worden. Was Sie sehen basiert auf CAD-Daten unserer Kunden. Wir erzeugen damit Bilder ausschließlich
Gegeben ist die Funktion f durch. Ihr Schaubild sei K.
 Aufgabe I 1 Gegeben ist die Funktion f durch. Ihr Schaubild sei K. a) Geben Sie die maximale Definitionsmenge D f an. Untersuchen Sie K auf gemeinsame Punkte mit der x-achse. Bestimmen Sie die Intervalle,
Aufgabe I 1 Gegeben ist die Funktion f durch. Ihr Schaubild sei K. a) Geben Sie die maximale Definitionsmenge D f an. Untersuchen Sie K auf gemeinsame Punkte mit der x-achse. Bestimmen Sie die Intervalle,
Mehrere Diagramme zu einer Darstellung kombinieren
 Mehrere Diagramme zu einer Darstellung kombinieren Linien, Balken, Säulen: Manchmal passt ein Diagrammtyp nicht ganz genau. Wenn du beispielsweise eine Entwicklung mit der parallel verlaufenden Anzahl
Mehrere Diagramme zu einer Darstellung kombinieren Linien, Balken, Säulen: Manchmal passt ein Diagrammtyp nicht ganz genau. Wenn du beispielsweise eine Entwicklung mit der parallel verlaufenden Anzahl
Klassenarbeit zu linearen Gleichungssystemen
 Klassenarbeit zu linearen Gleichungssystemen Aufgabe : Bestimme die Lösungsmenge der Gleichungssysteme mit Hilfe des Additionsverfahrens: x + 4y = 8 5x y = x y = x y = Aufgabe : Bestimme die Lösungsmenge
Klassenarbeit zu linearen Gleichungssystemen Aufgabe : Bestimme die Lösungsmenge der Gleichungssysteme mit Hilfe des Additionsverfahrens: x + 4y = 8 5x y = x y = x y = Aufgabe : Bestimme die Lösungsmenge
Aufgabensammlung Bruchrechnen
 Aufgabensammlung Bruchrechnen Inhaltsverzeichnis Bruchrechnung. Kürzen und Erweitern.................................. 4. Addition von Brüchen................................... Multiplikation von Brüchen...............................
Aufgabensammlung Bruchrechnen Inhaltsverzeichnis Bruchrechnung. Kürzen und Erweitern.................................. 4. Addition von Brüchen................................... Multiplikation von Brüchen...............................
Tipps und Tricks für CATIA V5
 DMU-NAVIGATOR Laden großer Baugruppen im DMU-Navigator In einigen Branchen wie dem Flugzeugbau wird der DMU-Navigator als Viewer eingesetzt. Leider kann es auch hier dauern, bis die komplette Geometrie
DMU-NAVIGATOR Laden großer Baugruppen im DMU-Navigator In einigen Branchen wie dem Flugzeugbau wird der DMU-Navigator als Viewer eingesetzt. Leider kann es auch hier dauern, bis die komplette Geometrie
Lineargleichungssysteme: Additions-/ Subtraktionsverfahren
 Lineargleichungssysteme: Additions-/ Subtraktionsverfahren W. Kippels 22. Februar 2014 Inhaltsverzeichnis 1 Einleitung 2 2 Lineargleichungssysteme zweiten Grades 2 3 Lineargleichungssysteme höheren als
Lineargleichungssysteme: Additions-/ Subtraktionsverfahren W. Kippels 22. Februar 2014 Inhaltsverzeichnis 1 Einleitung 2 2 Lineargleichungssysteme zweiten Grades 2 3 Lineargleichungssysteme höheren als
H. Gruber, R. Neumann. Erfolg im Mathe-Abi. Übungsbuch für die optimale Vorbereitung in Analysis, Geometrie und Stochastik mit verständlichen Lösungen
 H. Gruber, R. Neumann Erfolg im Mathe-Abi Übungsbuch für die optimale Vorbereitung in Analysis, Geometrie und Stochastik mit verständlichen Lösungen Inhaltsverzeichnis Inhaltsverzeichnis Analysis Von der
H. Gruber, R. Neumann Erfolg im Mathe-Abi Übungsbuch für die optimale Vorbereitung in Analysis, Geometrie und Stochastik mit verständlichen Lösungen Inhaltsverzeichnis Inhaltsverzeichnis Analysis Von der
Inhalte. Photogram. Aufnahmesysteme. HS BO Lab. für Photogrammetrie: Metrische Kameras und Innere Orientierung 1
 Inhalte Photogram. Aufnahmesysteme Metrische Kameras (Definition der Inneren Orientierung) Analoge Messkameras Fotografische Aspekte Digitalisierung analoger Bilder Digitale Messkameras HS BO Lab. für
Inhalte Photogram. Aufnahmesysteme Metrische Kameras (Definition der Inneren Orientierung) Analoge Messkameras Fotografische Aspekte Digitalisierung analoger Bilder Digitale Messkameras HS BO Lab. für
Informationsblatt Induktionsbeweis
 Sommer 015 Informationsblatt Induktionsbeweis 31. März 015 Motivation Die vollständige Induktion ist ein wichtiges Beweisverfahren in der Informatik. Sie wird häufig dazu gebraucht, um mathematische Formeln
Sommer 015 Informationsblatt Induktionsbeweis 31. März 015 Motivation Die vollständige Induktion ist ein wichtiges Beweisverfahren in der Informatik. Sie wird häufig dazu gebraucht, um mathematische Formeln
BASIS Karten, WEA-Katalog, Projektierung, Objekte etc.
 Das Basismodul enthält diese Elemente: 1. Projektsteuerung / -management 3. Kartenhandling-System 2. Windenergieanlagen-Katalog 4. Projektierung und objektorientierte Dateneingabe Die Projektsteuerung
Das Basismodul enthält diese Elemente: 1. Projektsteuerung / -management 3. Kartenhandling-System 2. Windenergieanlagen-Katalog 4. Projektierung und objektorientierte Dateneingabe Die Projektsteuerung
Physik 1 VNT Aufgabenblatt 8 5. Übung (50. KW)
") Physik 1 VNT Aufgabenblatt 8 5. Übung (5. KW) 5. Übung (5. KW) Aufgabe 1 (Achterbahn) Start v h 1 25 m h 2 2 m Ziel v 2? v 1 Welche Geschwindigkeit erreicht die Achterbahn in der Abbildung, wenn deren
Physik 1 VNT Aufgabenblatt 8 5. Übung (5. KW) 5. Übung (5. KW) Aufgabe 1 (Achterbahn) Start v h 1 25 m h 2 2 m Ziel v 2? v 1 Welche Geschwindigkeit erreicht die Achterbahn in der Abbildung, wenn deren
Primzahlen und RSA-Verschlüsselung
 Primzahlen und RSA-Verschlüsselung Michael Fütterer und Jonathan Zachhuber 1 Einiges zu Primzahlen Ein paar Definitionen: Wir bezeichnen mit Z die Menge der positiven und negativen ganzen Zahlen, also
Primzahlen und RSA-Verschlüsselung Michael Fütterer und Jonathan Zachhuber 1 Einiges zu Primzahlen Ein paar Definitionen: Wir bezeichnen mit Z die Menge der positiven und negativen ganzen Zahlen, also
Drei Fragen zum Datenschutz im. Nico Reiners
 Drei Fragen zum Datenschutz im Geoinformationswesen Nico Reiners 1. Frage Welche Geoinformationen sind personenbezogen? Personenbezug? Personenbezogene Daten sind Einzelangaben über persönliche oder sachliche
Drei Fragen zum Datenschutz im Geoinformationswesen Nico Reiners 1. Frage Welche Geoinformationen sind personenbezogen? Personenbezug? Personenbezogene Daten sind Einzelangaben über persönliche oder sachliche
RealdarstellungenGründe für Realdarstellungen:
 Leitfaden Die folgenden Darstellungsbeispiele wurden anhand eines Scheinwerfers erstellt, den uns die LightPartner GmbH aus Bremen zur Verfügung gestellt hatte. Es gibt verschiedene Möglichkeiten, wie
Leitfaden Die folgenden Darstellungsbeispiele wurden anhand eines Scheinwerfers erstellt, den uns die LightPartner GmbH aus Bremen zur Verfügung gestellt hatte. Es gibt verschiedene Möglichkeiten, wie
Praktikum Schau Geometrie
 Praktikum Schau Geometrie Intuition, Erklärung, Konstruktion Teil 1 Sehen auf intuitive Weise Teil 2 Formale Perspektive mit Aufriss und Grundriss Teil 3 Ein niederländischer Maler zeigt ein unmögliches
Praktikum Schau Geometrie Intuition, Erklärung, Konstruktion Teil 1 Sehen auf intuitive Weise Teil 2 Formale Perspektive mit Aufriss und Grundriss Teil 3 Ein niederländischer Maler zeigt ein unmögliches
Mathematik. UND/ODER Verknüpfung. Ungleichungen. Betrag. Intervall. Umgebung
 Mathematik UND/ODER Verknüpfung Ungleichungen Betrag Intervall Umgebung Stefan Gärtner 004 Gr Mathematik UND/ODER Seite UND Verknüpfung Kommentar Aussage Symbolform Die Aussagen Hans kann schwimmen p und
Mathematik UND/ODER Verknüpfung Ungleichungen Betrag Intervall Umgebung Stefan Gärtner 004 Gr Mathematik UND/ODER Seite UND Verknüpfung Kommentar Aussage Symbolform Die Aussagen Hans kann schwimmen p und
Softwareprojekt Spieleentwicklung
 Softwareprojekt Spieleentwicklung Prototyp I (2D) Prototyp II (3D) Softwareprojekt 12.04. 19.04. 26.04. 03.05. 31.05. Meilenstein I 28.06. Meilenstein II Prof. Holger Theisel, Tobias Günther, OvGU Magdeburg
Softwareprojekt Spieleentwicklung Prototyp I (2D) Prototyp II (3D) Softwareprojekt 12.04. 19.04. 26.04. 03.05. 31.05. Meilenstein I 28.06. Meilenstein II Prof. Holger Theisel, Tobias Günther, OvGU Magdeburg
Ablauf bei der Synchronisation und Sortierung von Dateien aus mehreren Kameras
 Ablauf bei der Synchronisation und Sortierung von Dateien aus mehreren Kameras Dieser Abgleich ist immer dann nötig, wenn mit verschiedenen Kameras fotografiert und vorab vergessen wurde, die Aufnahmezeit
Ablauf bei der Synchronisation und Sortierung von Dateien aus mehreren Kameras Dieser Abgleich ist immer dann nötig, wenn mit verschiedenen Kameras fotografiert und vorab vergessen wurde, die Aufnahmezeit
Woraus besteht ein Bild? 28.02.2008 (c) Winfried Heinkele 2006 2
 Winfried Heinkele 2006 2") Woraus besteht ein Bild? 28.02.2008 (c) Winfried Heinkele 2006 2 Was ist ein Pixel? Die durch das Objektiv einer Kamera auf einen Film oder einen elektronischen Bildsensor projizierte Wirklichkeit ist
Woraus besteht ein Bild? 28.02.2008 (c) Winfried Heinkele 2006 2 Was ist ein Pixel? Die durch das Objektiv einer Kamera auf einen Film oder einen elektronischen Bildsensor projizierte Wirklichkeit ist
Würfelt man dabei je genau 10 - mal eine 1, 2, 3, 4, 5 und 6, so beträgt die Anzahl. der verschiedenen Reihenfolgen, in denen man dies tun kann, 60!.
 040304 Übung 9a Analysis, Abschnitt 4, Folie 8 Die Wahrscheinlichkeit, dass bei n - maliger Durchführung eines Zufallexperiments ein Ereignis A ( mit Wahrscheinlichkeit p p ( A ) ) für eine beliebige Anzahl
040304 Übung 9a Analysis, Abschnitt 4, Folie 8 Die Wahrscheinlichkeit, dass bei n - maliger Durchführung eines Zufallexperiments ein Ereignis A ( mit Wahrscheinlichkeit p p ( A ) ) für eine beliebige Anzahl
Optimales Zusammenspiel von Kamera und Optik. Carl Zeiss AG, Udo Schellenbach, PH-V
 Trivialitäten Nicht mehr ganz so trivial Geheimwissen Welchen Stellenwert nimmt die Optik bei Bildverarbeitern oft ein? Trivialitäten: Wie groß ist der Sensor der Kamera? Deckt der Bildkreis des Objektivs
Trivialitäten Nicht mehr ganz so trivial Geheimwissen Welchen Stellenwert nimmt die Optik bei Bildverarbeitern oft ein? Trivialitäten: Wie groß ist der Sensor der Kamera? Deckt der Bildkreis des Objektivs
50. Mathematik-Olympiade 2. Stufe (Regionalrunde) Klasse 11 13. 501322 Lösung 10 Punkte
 Klasse 11 13. 501322 Lösung 10 Punkte") 50. Mathematik-Olympiade. Stufe (Regionalrunde) Klasse 3 Lösungen c 00 Aufgabenausschuss des Mathematik-Olympiaden e.v. www.mathematik-olympiaden.de. Alle Rechte vorbehalten. 503 Lösung 0 Punkte Es seien
50. Mathematik-Olympiade. Stufe (Regionalrunde) Klasse 3 Lösungen c 00 Aufgabenausschuss des Mathematik-Olympiaden e.v. www.mathematik-olympiaden.de. Alle Rechte vorbehalten. 503 Lösung 0 Punkte Es seien
Erfahrungen mit Hartz IV- Empfängern
 Erfahrungen mit Hartz IV- Empfängern Ausgewählte Ergebnisse einer Befragung von Unternehmen aus den Branchen Gastronomie, Pflege und Handwerk Pressegespräch der Bundesagentur für Arbeit am 12. November
Erfahrungen mit Hartz IV- Empfängern Ausgewählte Ergebnisse einer Befragung von Unternehmen aus den Branchen Gastronomie, Pflege und Handwerk Pressegespräch der Bundesagentur für Arbeit am 12. November
Linienland, Flächenland und der Hyperraum Ein Ausflug durch die Dimensionen
 Linienland, Flächenland und der Hyperraum Ein Ausflug durch die Dimensionen Stephan Rosebrock Pädagogische Hochschule Karlsruhe 23. März 2013 Stephan Rosebrock (Pädagogische Hochschule Linienland, Karlsruhe)
Linienland, Flächenland und der Hyperraum Ein Ausflug durch die Dimensionen Stephan Rosebrock Pädagogische Hochschule Karlsruhe 23. März 2013 Stephan Rosebrock (Pädagogische Hochschule Linienland, Karlsruhe)
Neue Wege im Reporting Design mit Hilfe von Eye Tracking Analysen
 Neue Wege im Reporting Design mit Hilfe von Eye Tracking Analysen Controller Congress 2013 Prof. (FH) Dr. Christoph Eisl FH-OÖ: Österreichs führender FH-Anbieter CRF Platz 1 unter den Finanzstudiengängen
Neue Wege im Reporting Design mit Hilfe von Eye Tracking Analysen Controller Congress 2013 Prof. (FH) Dr. Christoph Eisl FH-OÖ: Österreichs führender FH-Anbieter CRF Platz 1 unter den Finanzstudiengängen