Inhaltsverzeichnis Feldbussysteme
|
|
|
- Werner Braun
- vor 8 Jahren
- Abrufe
Transkript
1 Inhaltsverzeichnis Feldbussysteme 1. Einführung 2. Mechatronische Aspekte von Feldbussystemen 3. ISO-OSI 7-Schichten-Modell 4. Klassische Sensor-/Aktor-bussysteme 5. Kommunikationssysteme in den Automobil 6. Feldbusse auf Ethernet-Basis 7. Engineering und Betrieb von Feldbussystemen 8. Experimentalle Übungen 1

2 Inhalt Kapitel 5 1. Anforderungen und Architektur 2. CAN 3. TTCAN 4. FlexRay 5. LIN 6. MOST 2

3 Entwicklung Kfz-Elektronik Quelle: Mikroelektronik-Trendanalyse des ZVEI 3



4 Beispiel: Innenbeleuchtung Traditionell 2002 Quelle: Uni Kassel 4


 2000 1900 Kabel (mit entsprechenden Steckern, 4 km")
5 Qualitätsanforderungen Hardware Reduzierung der Zahl der Komponenten <-> wird aber immer mehr Software Komplexität steigt, Programmgröße steigt Interaktion, Kombinationsfehler -> offene Bussysteme ADAC Pannenstatistik 2004: 40% Autopannen wegen Elektronik oder SW Neue Probleme Kabelbaum (Erstellung, Montage, Test) Bandbreitenanforderung Kabel (Batterie, Lampe, Blinker, Zündung, Autoradio, Antenne) Kabel (mit entsprechenden Steckern, 4 km Kupferkabel, ~ 40 kg) 5
 2000 1900 Kabel (mit entsprechenden Steckern, 4 km")

6 Bussysteme eines modernen Mittelklassefahrzeugs mit Vollausstattung Quelle: 6

7 Anwendungsbereiche und Anforderungen an Bussysteme im Kfz Anwendungen Botschaftslänge Botschaftsrate Resultierende Datenrate Latenz - zeiten Fehlersicherheit Kosten On Board - Kommunikation High Speed Steuerung Kurz Hoch Hoch Sehr kurz Extrem hoch Mittel Low Speed Steuerung Kurz Niedrig Niedrig Mäßig Sehr Hoch Sehr niedrig Multimedia Lang Hoch Sehr Hoch Mäßig Mäßig Hoch Off Board Kommunikation Werkstattdiagnose Kurz Niedrig Niedrig Unwichtig Gering Niedrig Fertigungstest Beim Fahrzeug und beim Gerätehersteller inklusive End of Line Programmierung Lang bis sehr Lang Niedrig Hoch Unwichtig Mäßig Unwichtig Applikation Am Fahrzeug und an Prüfständen in der Entwicklungsphase (Umprogrammieren, Kalibrieren) Kurz Mittel (Hoch bei Messaufgaben) Mittel bis hoch Kurz Gering Unwichtig Quelle: Zimmermann,W./Schmidgall, R. (2007), S. 3 7
 Kurz Mittel (Hoch bei Messaufgaben) Mittel bis hoch Kurz Gering")

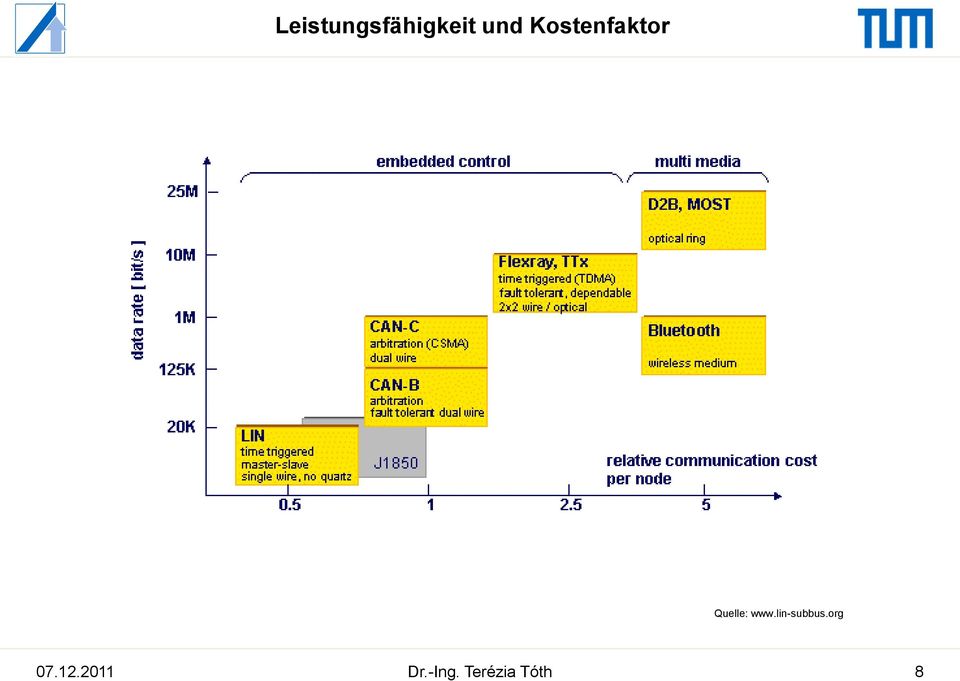
8 Leistungsfähigkeit und Kostenfaktor Quelle: 8
9 SAE-Klassen für Bussysteme SAE = Society of Automotive Engineers, Mitglieder in 100 Ländern Kraftfahrzeuge, Schienenfahrzeuge, Landmaschine, Schiffe und Flugzeuge SAE- Klasse A B C C+ D Merkmale Bitrate Typisches Bussystem Vernetzung von Aktoren und Sensoren Geringe Ausprägung von Fehlererkennungsund -behebungsmechanismen Vernetzung von Steuergeräten (z.b. Komfortbereich) Komplexe Mechanismen zur Fehlererkennung und -behebung Vernetzung von Steuergeräten mit einfachen Echtzeitanwendungen (z.b. Antriebsstrang) Multimedia-Anwendungen Sehr hohe Botschaftslängen < 25 Kbit/s Kbit/s Kbit/s > 10 Mbit/s > 10 Mbit/s LIN-Bus CAN-Bus ( Low Speed ) CAN-Bus ( High Speed ) FlexRay, TTP MOST-Bus Anwendung Karosserieelektronik Karosserieelektronik, Rückhaltesysteme Antriebsstrang, Fahrwerk, zunehmend auch Diagnose x-by-wire (Steer, Brake) Multimedia (Audio, Video) Quelle: Konrad Reif (2006), S. 14 9
 Multimedia-Anwendungen Sehr hohe Botschaftslängen < 25 Kbit/s 25 125 Kbit/s 125 1000 Kbit/s > 10 Mbit/s > 10 Mbit/s LIN-Bus CAN-Bus ( Low Speed ) CAN-Bus ( High Speed ) FlexRay,")
10 Kfz-Busse (Schicht 0 bis 2) Bustyp Anwendung Europ. Standards US-Standards Zeichen-basiert (UART) K/L-Line Diagnose ISO 9141 SAE J1708 Diagnose, Class A On Board SAE J1708 (Truck and Bus) 9.6 kbit/s LIN Class A On Board Herstellerkonsortium 20 kbit/s PWM-basiert SAE J1850 Bitstrom-basiert Puls-Width Modulation Diagnose, Class A/B On Board CAN Class B/C On Board ISO Bosch CAN 2.0 A, B kbit/s ISO CAN für Zugfahrzeuge und Anhänger ISO ISOBUS CAN für Landmaschinen (Basis J1939) TTCAN Class C(+) On Board ISO Bosch, 1 Mbit/s FlexRay Class C+ On Board Herstellerkonsortium 10 Mbit/s TTP Class C+ On Board Herstellerkonsortium MOST Multimedia Herstellerkonsortium 25 Mbit/s SAE J2602 SAE J1850 (PWM Ford, VPWM GM, Chrysler) 10,4 und 41,6 kbit/s SAE J2284 (Passenger Cars) 500 kbit/s SAE J1939 (Truck and Bus) 250 kbit/s Quelle: Zimmermann,W./Schmidgall, R. (2007), S. 6 10
 TTCAN Class C(+) On Board ISO 11898-4 Bosch, 1 Mbit/s FlexRay Class C+ On Board")

11 Kfz-Busse (Transportprotokolle - Schicht 4) Automotive Open System Architecture Transportprotokoll Anwendung Europ. Standards US-Standards ISO TP CAN ISO AUTOSAR TP FlexRay AUTOSAR Standard SAE J1939 CAN SAE J1939/21 TP 1.6 TP 2.0 CAN Hausstandard VW/Audi/Seat/Skoda (Basis OSEK COM 1.0) Offene Systeme und deren Schnittstellen für die Elektronik im Kraftfahrzeug Quelle: Zimmermann,W./Schmidgall, R. (2007), S. 7 11

12 Kfz-Busse (Anwendungsprotokolle - Schicht 7) Protokoll Anwendung Europ. Standards US-Standards ISO 9141-CARB KWP 2000 Keyword Protocol UDS Unified Diagnostic Services OBD CCP Can Calibration Protocol XCP Extended Calibration Protocol Diagnose US OBD On Board Diagnosis Diagnose (allgemein und OBD) Diagnose (allgemein und OBD) Diagnose US OBD European OBD ISO Veraltete US- Diagnoseschnittstelle ISO KWP 2000 Diagnostics on K- Line ISO KWP 2000 Diagnostics on CAN ISO UDS Unified Diagnostic Services ISO (identisch mit den US- Standards) SAE J1979, J2190 SAE J1930, J1962, J1978, J1979, J2012, J2186 Applikation ASAM AE MCD 1 ASAM-Konsortium Automotive Electronics Measurement, Calibration and Diagnostics Association for Standardisation of Automation and Measuring Systems Quelle: Zimmermann,W./Schmidgall, R. (2007), S. 8 12
 SAE J1979, J2190 SAE J1930, J1962, J1978, J1979, J2012, J2186 Applikation ASAM AE MCD 1")
13 Standards für die Implementierung von Anwendungen mit Bussystemen Standard Anwendung Europ. Standards OSEK/VDX Betriebssystem Kommunikation Netzmanagement ISO OSEK OS ISO OSEK COM ISO OSEK NM ASAM AE MCD Applikation Standardisierte Mess-, Kalibrier- und Diagnosewerkzeuge mit den wichtigen Teilstandards ODX Datenformat für Diagnosedaten FIBEX Datenformat für die Beschreibung der Buskommunikation HIS Vehicle Distributed Executive Flashen Hardwaretreiber Hersteller Initiative Software Softwaremodule für Steuergeräte AUTOSAR Softwarearchitektur Softwarestruktur zukünftiger Steuergeräte Field Bus Exchange Format Open Diagnostic Data Exchange Quelle: Zimmermann,W./Schmidgall, R. (2007), S. 8 13

14 Inhalt Kapitel 5 1. Anforderungen und Architektur 2. CAN 3. TTCAN 4. FlexRay 5. LIN 6. MOST 14



15 Beispiel: Vernetzung Standlicht AUDI A4 Vorgänger S S S P AUDI A P 58 re 58 li P re 58 li li 58re M2 M3 M1 M4 X M2 M3 M1 M4 X Quelle: AUDI 15

 V.")
16 CAN - Überblick Controller Area Network 1983 von der Robert Bosch GmbH, 1987 mit der Firma Intel ISO Ereignissteuert, schnell (bis 1MBit/s) V.24 Leitung (CAN232: RS232 Konverter) Multi-Master Kommunikationsstruktur 16
 Multi-Master")
 dominant der Pegel 1 (5V) ist rezessiv Etschberger,")
17 Wiederholung: MAC, Prinzip der Busarbitrierung beim CAN Realisierung von dominant rezessivem Pegel auf der Basis einer Wired-And Verknüpfung Bitweise Arbitrierung mit Open-Collector-Schaltung S - Sender E - Empfängern Buspegel 0 (0V) dominant der Pegel 1 (5V) ist rezessiv Etschberger,
 dominant der Pegel 1 (5V) ist rezessiv")
 Datenanforderungstelegramm (Remote Frame) Fehlertelegramme (Error Frame)")
18 Wiederholung: Arbitrierung über Identifier beim CAN S O F 10 Identifier R T R Steuerfeld 0 8 Byte Datenfeld TN 1 TN 2 TN 3 Steuerfeld TN 3 Daten TN 3 Arbitrierungsphase Start Teilnehmer 2 ist raus Teilnehmer 1 ist raus Vier Telegrammformen als Nachrichtenformate: Datentelegramm (Data Frame) Datenanforderungstelegramm (Remote Frame) Fehlertelegramme (Error Frame) Überlasttelegramm (Overload Frame) Zeit Extended Format hat 29 Bit-Identifier Etschberger,
 Überlasttelegramm (Overload Frame) Zeit Extended Format hat 29 Bit-Identifier")

19 Beispiel Quelle: AUDI 19


20 Eingang eines Telegramms beim CAN Acceptance Filter: Vergleich (Identifier, Acceptance Code Register) Höchstwertige 8 Bits des Identifiers Relevant: Bit=0 im Acceptance Mask Register relevante Nachricht Identifier Acceptance Code Register x x x Acceptance Mask Register irrelevante Nachricht Identifier Acceptance Code Register x x x Acceptance Mask Register Beispiel: Motor: x8x h -> 280 h Motor1 ABS: xax h -> 1A0 h Bremse1 Dach, Wischer, Verdeck: xdx h 20

21 Modi von CAN - Steuergeräten Sleep-Mode Einfluss auf Ruhestrombilanz des Gesamtfahrzeuges (Liegenbleiber) Wegen verteilten Funktionen Schlafbereitschaft aller SG zu berücksichtigen Wake Up Wakeup durch Sensoren/CAN-Ereignisse Wegen verteilten Funktionen müssen immer alle SG geweckt werden Normal Mode 21
22 CAN - Botschaftsaufbau A B C D E F G H I J K Feld Bezeichnung Länge/Bit Inhalt A SOF 1 Start of Frame, Botschaftsbeginn B ID 11 oder 29 Identifier (Standard oder Extended) C RTR Telegrammtyp D Steuerfeld 6 Format, Erweiterung, Datenfeldlänge E Datenfeld 0 bis 64 Nutzdaten F CRC- Segment 15 Prüfsequenz G CRC- Definition 1 CRC- Begrenzung H ACK 1 Bestätigungsfeld I ACK- Delimiter 1 ACK Begrenzung J EOF 7 End-of-Frame-Feld K Interframe-Space 3 Telegrammzwischenraum Quelle: Konrad Reif (2006), S.18 22
23 CAN-Telegrammtypen Telegrammtyp Datentelegramm Datenanforderungstelegramm Fehlertelegramm Telegramminhalt Das Telegramm dient zur Datenübertragung zu einem oder mehreren Empfängern und wird auf Initiative des Senders versandt. Das Telegramm dient zur Anforderung einer Botschaft durch einen Busteilnehmer und wird auf Initiative des Empfängers versandt. Mit diesem Telegramm signalisieren Sender und Empfänger das Erkennen eines Fehlers. Quelle: Konrad Reif (2006), S
24 CAN - Fehlervermeidungsmechanismen Mechanismus Bitmonitoring Überwachung des Telegrammformats Zyklische Blocksicherung (CRC) Überwachung Acknowledgement Überwachung Bitstuffing Erläuterung Der sendende Knoten prüft, ob der zur Sendung beabsichtigte Pegel auch auf dem Bus erscheint. Jeder Netzknoten überwacht, ob die auf dem Bus gesendete Botschaft Formfehler enthält. Bei diesem Verfahren wird aus Botschaftsbeginn, Arbitrierungsfeld, Steuerfeld und Nutzdaten eine Prüfsequenz durch Polynomdivision gemäß dem CRC- Verfahren gebildet. Diese Sequenz wird empfangsseitig ebenfalls gebildet und durch den Empfänger mit der übertragenden Prüfsequenz verglichen. Der Sender einer Botschaft erwartet die Bestätigung des fehlerfreien Empfangs durch Aufschaltung eines dominanten Pegels im ACK- Feld durch den Empfänger. Bleibt die Bestätigung aus, geht der Sender davon aus, dass ein Fehler aufgetreten ist. Alle Busteilnehmer überwachen die Einhaltung der Bitstuffing Regeln 24
25 Inhalt Kapitel 5 1. Anforderungen und Architektur 2. CAN-Bus 3. TTCAN 4. FlexRay 5. LIN 6. MOST 25
: Garantierte Latenz nur für hochpriore Nachrichten Maximale Latenz nicht berechenbar oder simulierbar TTCAN (Time Triggered CAN):")
26 Warum TTCAN? Beim CAN fehlt die Vorhersagbarkeit (predictability): Garantierte Latenz nur für hochpriore Nachrichten Maximale Latenz nicht berechenbar oder simulierbar TTCAN (Time Triggered CAN): CAN-kompatibel CAN-Entwicklungserfahrung nach wie vor nutzbar ISO (2004) Zeitgesteuert (TDMA) Garantierte Latenz = Deterministisch Steuerung durch (mehrere) Zeitmaster 26

27 Zeitmaster, zeitgesteuerte Synchronisation Alle Knoten benötigen die selbe Zeit zum Versenden von Nachrichten Zeitsynchronisation notwendig (Global Time) Zeitmaster übernimmt das Versenden der Referenznachrichten In jeder Zeile der Systemmatrix werden Referenznachrichten versandt, die die Zeit der Knoten auf 0 setzt. Redundante Zeitmaster, da bei dessen Ausfall die gesamte Kommunikation gestört ist Quelle: Thomas Dohmke TU Berlin 27
 Die Reference Message beinhaltet zusätzliche Kontrollinformationen, wie global time und aktueller timer master Die")
28 TTCAN Systemmatrix (1) Reference Message Die Reference Message wird durch seinen Identifier wiedererkannt und dient u.a. der Zeitsynchronisation In extension level 1 (SW Lösung) Die Reference Message beinhaltet einige Kontollinformationen (1 Byte). Die übrigen Bytes werden für Transferdaten benutzt In extension level 2 (HW Lösung) Die Reference Message beinhaltet zusätzliche Kontrollinformationen, wie global time und aktueller timer master Die Reference Message von Level 2 beinhaltet 4 Bytes, damit sie mit den unter ihr liegenden extension level kompatibel ist. Die übrigen 4 Bytes sind für Datentransfer verfügbar. Quelle: BOSCH 28

29 TTCAN Systemmatrix (2) Quelle: BOSCH Exclusive window für periodische Nachrichten Exklusiv reserviert für das Versenden einer Nachricht, ohne Konkurenz mit weiteren Nachrichten Keine automatische Wiederversendung von Nachrichten, die nicht erfolgreich versendet wurden. Keine Zeitverzögerung beim Versenden der Nachrichten Arbitrating window für Ereignis-Nachrichten (Arbitrierungsfenster) Konkurrierende Nachrichten werden mit dem Arbitrierungsmechanismus behandelt (Timeslot + ereignisgesteuerte Arbitrierung). Free window Reserviert für spätere Erweiterungen des Netzwerkes 29

30 Neue Anforderungen an die Bussysteme Erreichte Anforderungen durch TTCAN: Garantierte Latenz Bestehende Anforderungen: Größere Datenbreite Verbesserte Fehlertoleranz Lösung: FlexRay 30
31 Inhalt Kapitel 5 1. Anforderungen und Architektur 2. CAN 3. TTCAN 4. FlexRay 5. LIN 6. MOST 31
 Zeitschlitzverfahren D.")
32 FlexRay Konsortium Gründung 1999 BMW, DaimlerChrysler, Motorola (Freescale), Philips, Bosch, General Motors, Volkswagen Ziel: Definition eines deterministischen und fehlertoleranten Kommunikationsprotokolls mit einer maximalen Übertragungsrate von 10MBit/s Bsp.: x-by-wire Multi-Master Kommunikationsstruktur Bis zu 64 TN TDMA (Time Division Multiple Access) Zeitschlitzverfahren D.h. arbitrierungsfrei (um eine Unabhängigkeit von der Buslast zu erreichen) Nachrichten haben keine Empfänger- oder Absender-Adressen (über Zuordnung zu Zeitschlitz) Ausfall eines Knotens -> Entfernen eines Zeitschlitzes, kein Busausfall Konfigurierbare synchrone und asynchrone Übertragung Elektrische und optische Übertragungsmedien Maximale Buslänge 24m, mit Kaskadenschaltung erweiterbar 32
33 FlexRay - Redundanz Um das Ausfallrisiko zu minimieren, arbeitet FlexRay wahlweise mit zwei getrennten Kommunikationskanälen. Zweiter Kanal: Unabhängige parallele Nachrichten Redundante Nachrichten oder Verdoppelung der Bandbreite -> 20MBit/s Buswächter (bus guardian) sorgt dafür, dass ein Knoten nur Zugriff zum Bus hat, wenn dieser an der Reihe ist (<-> babbling idiot). 33
 Hybridsysteme Quelle:www.elektroniknet.")

34 FlexRay Topologie Bustopologien Passiver Stern Passiver Bus (8 TN) Aktiver Stern (16 TN) Kaskadenschaltung (max. 3 Sterne zw. 2 TN) Hybridsysteme Quelle: Verschiedene Bustopologien, die sich alle durch folgende Merkmale auszeichnen: Optionale redundante Kommunikation durch mehrere Kanäle Alle Knoten sind mit der Fahrzeugbatterie verbunden verfügen über Power-Management lassen sich über den Bus wecken besitzen eine globale Zeit (zur synchronen Übertragung) 34

35 Systemarchitektur eines FleyRay-Knotens Steuersignale Übertragungspfad der Daten Sleep / Wake-up Anwendungen Kommunikationsund Sync.- Fehlererkennung <->Busmedium Datenübermittlung gem. global gültige Zeitbasis Gestrichelt gezeichnete Blöcke sind im Fall einer zweikanaligen Ausführung vorzusehen Quelle: Konrad Reif (2006), S


36 FlexRay Kommunikationsszyklus, Buszugriffsverfahren (1) Topologie. 12 ms Kanal 1 Kanal 2 Redundanz oder doppelte Bandbreite Quelle: Konrad Reif (2006), S. 27 Zeitsteuerung: Globale Makroticks (1..6 µs) als virtuelle Zeiteinheit Slot Raster Maximal 2047 Zeitschlitze in beiden Segmenten Statisches Segment TDMA Zeitschlitzzähler in jedem TN Feste Zeitschlitze, streng deterministisch Synchroner Datenversand auf beiden Kanälen Min 2, Max 1023 Zeitschlitze Dynamisches Segment optional Flexible TDMA anhand Priorität Slot Counter: Sendeberechtigung Minislots (kürzer als im stat. Segment) Variable Datenlänge -> Minislot-Anpassung Max 1024 Zeitschlitze 36
 Quelle:www.elektroniknet.de Symbol Window Nach dem Dynamischen Segment Sendet ein Symbol ohne Arbitrierung Z.B.")
37 FlexRay Kommunikationsszyklus, Buszugriffsverfahren (2) Quelle: Symbol Window Nach dem Dynamischen Segment Sendet ein Symbol ohne Arbitrierung Z.B.: Wake-Up Signal NIT Network Idle Time, Ruhezustand Keine Nachrichten werden übertragen Falls notwendig, füllt die Zeit bis Zyklusdauer Sync.: Korrektur der inneren Uhr 37
 Nutzdaten Sync")

38 FlexRay - Botschaftsaufbau Header Nutzdaten Trailer 5 Byte Header Steuerbits (5bit) Reserved Bit: 0 Payload Preamble Indicator Bit: statisches oder dynamisches Segment Null Frame Indicator Bit: gültige oder ungültige (=keine, aber wegen fester Länge) Nutzdaten Sync Frame Indicator Bit: ob Frame für Sync. verwendet werden kann oder nicht Startup Frame Indicator Bit: Startup-Frame zur Sync. beim Systemstart Frame ID: Nummer des Zeitschlitzes, Payload length: Datenworte (16 Bit / Datenwort) Header CRC Cycle Counter 38
39 Inhalt Kapitel 5 1. Anforderungen und Architektur 2. CAN 3. TTCAN 4. FlexRay 5. LIN 6. MOST 39

40 Beispiel: Audi A8 Generation D3 Quelle: Audi 40
41 LIN Gründung: 1999 BMW, Volkswagen, Audi, DaimlerChrysler, Volvo, Motorola Ziel: Bus im Low-End Bereich als Alternative zum CAN-Protokoll Nicht für sicherheitskritische Anwendungen konzipiert Niedrigere Kosten (verglichen mit CAN-Bus) Transceiver (TRX) ~0,35 (i.vgl. zu 0,70 pro CAN-Transceiver) Eine Datenübertragungsleitung weniger (kein Twisted-Pair) Einsatz kostengünstiger Komponenten (RC-Kombinationen statt Quarze) Bauraumeinsparung durch einfachere Elektroniken 41
42 LIN: Einsatzgebiete Quelle: TU Dortmund Module für Türen, Lenkräder, Sitze, Klimasteuerungen, Lichtanlagen, Regensensoren und Lichtmaschinen 42

43 LIN: Schicht 1 und 2 Übertragung: ISO 9141, bidirektionale Eindraht-Verbindung Spannungsversorgung 8V bis 18V Dominante (Low) und rezessive (High) Pegel wie CAN-Bus Bitrate 1-20kbit/s Entfernung bis zu 40m Datenmenge gering MAC: 1 Master + max. 16 Slaves Master Gateway zu CAN Scheduling Tabelle: Reihenfolge der zu sendenden Botschaften Normal-, Sleep- und Wake-up-Modus sowie Management der Stromversorgung 43
44 LIN: Botschaft Header Response Synch break: Synchronisationspause Dominanter Pegel (0V) Start einer Botschaft >= 13 Bit lang -> eindeutig Synch delimiter Rezessiver Pegel (Vsup) Synch field Synchronisationsfeld 2x4 Bit, Wert: 0x55 Systemtakt Identifier Inhalt der Botschaft Länge der Botschaft Paritätsprüfung der Identifier 44
45 Inhalt Kapitel 5 1. Anforderungen und Architektur 2. CAN 3. TTCAN 4. FlexRay 5. LIN 6. MOST 45

46 MOST- Anwendungsgebiet, Beispiel: Infotainment Audi Konsortium MOST Cooperation 1998, seit 2002 in Serienfahrzeugen BMW, DaimlerChrysler,.. Telematik und Multimedia-Anwendungen Vernetzung von Autoradio, Handy, Navigationssystem Echtzeitverhalten & Übertragungssicherheit weniger relevant Hohe Übertragungsbandbreite notwendig Audi logbook Rear Seat Entertainment Sprachbedienung TV Handyvorbereitung Telematics/Dienste Car Funktionen Internet Multimedia Kartenleser Rear Seat Entertainment Sprachbedienung DVD TV Telematics/Dienste Telefon DVD-Navigation MD Wechsler CD Wechsler CD Player Telefon Navigation CD Wechsler Bose Sound Radio Anfang 1996 Navigation plus Navigation CD Wechsler Bose Sound Radio 2000 Bose Sound 5 Kanal DSP Satellite Radio USA DAB Radio 2002 Quelle: Audi 46
, Electrical /Optical Converter (EOC) Geringes Gewicht Galvanische Trennung Keine EMV-Probleme Manchester Kodierung Bitrate: von 21,2 Mbit/s bis")
47 MOST- Schicht 1 Übertragung: Topologie: Ring, Stern oder Bus mit max. 64 TN Punkt zu Punkt Verbindungen: Durchlaufverzögerung eines aktiven Steuergerätes 2 Frames, bei 25Mbit/s ca. 45µs Medium: Kunststoff LWL Plastic Optical Fiber (POF), Electrical /Optical Converter (EOC) Geringes Gewicht Galvanische Trennung Keine EMV-Probleme Manchester Kodierung Bitrate: von 21,2 Mbit/s bis mehrere 100 Mbit/s 47

48 MOST- Schicht 2 MAC: synchron: TDMA durch Master / Slave, asynchron: CSMA/CA Timing Master Framegenerierung Muss jedes Gerät können Alle andere Geräte: Slaves Systemstart Weckende Komponente moduliertes Licht an TX -> weckt dadurch die nächste Komponente im Ring -> Kettenreaktion Geräte: 44,1 khz Audio-Sampling-Rate -> Systemtakt Frames/s 48
49 MOST- Systemzustände Power_Off Keine Bordspannung Sleep_Mode Keine Buskommunikation Geräte ausgeschaltet Einstellungen erhalten Minimaler Ruhestrom Wecken durch einen Wake_Up_Event Stand_By_Mode Geräte komplett initialisiert Alle Ausgabemedien (Display, DSP-Verstärker, Funktionsbeleuchtung) inaktiv oder stumm Power_On_Mode Geräte vollständig aktiviert Aktiv wenn: Stand_By_Mode & ein Gerät Aktivität anfordert 49
 Asynchrone Kanäle z.b. CD-ROM Synchrone Kanäle: Hohe Bandbreite TDMA Zeitschlitze Adressierung entfällt 6.")
50 MOST Botschaft (1) 1 Block (16 Frames) Master Master Master 1 Frame (64 Byte = 512 Bit) preamble descriptor byte 0 byte 1 byte 2 byte 3 byte 4 byte 5 byte 56 byte 57byte 58 byte 59 byte 0 byte 1 Status boundary Kontroll- Kontroll P Synchrone Kanäle z.b. Audio, Video Nutzdaten(60 Byte) Asynchrone Kanäle z.b. CD-ROM Synchrone Kanäle: Hohe Bandbreite TDMA Zeitschlitze Adressierung entfällt Quadlets Asynchrone Kanäle: Paketweise Übertragung Reduziert anteilig synchrone Kanäle 9..2 Quadlets Quadlet = 4 Bytes 50

51 MOST Botschaft (2) 1 Block (16 Frames) Master Master Master 1 Frame (64 Byte = 512 Bit) preamble descriptor byte 0 byte 1 byte 2 byte 3 byte 4 byte 5 byte 56 byte 57byte 58 byte 59 byte 0 byte 1 Status boundary Kontroll- Kontroll P Synchrone Kanäle Asynchrone Kanäle Boundary Descriptor Trennlinie Gesetzt im Timing Master Systemstart: 10 synchrone, 5 synchrone Quadlets Verschiebung während der Laufzeit Richtung mehr asynchrone Bandbreite 51
 Asynchrone Kanäle z.b. CD-ROM (0 9 quadlets)")
52 MOST Botschaft (3) 1 Block (16 Frames) Master Master Master 1 Frame (64 Byte = 512 Bit) preamble descriptor byte 0 byte 1 byte 2 byte 3 byte 4 byte 5 byte 56 byte 57byte 58 byte 59 byte 0 byte 1 Status boundary Kontroll- Kontroll P Synchrone Kanäle z.b. Audio, Video (6 15 quadlets) Asynchrone Kanäle z.b. CD-ROM (0 9 quadlets) Nutzdaten (60 Byte) vom nächsten Frame Kontrollframe: für Kommandos, Status, Diagnose verteilt: 2 Byte / Frame * 16 Frame / Block = 2756 Kontrollframes/s (44100/16) = Bruttodatenrate 705,5 kbit/s (2756*32*8 Bits/s) -> minus Bandbreite für interne Dienste, Datensicherung, Adressierung, Netzwerkmanagement = Nettobandbreite von 363,1 kbit/s Kontrollframe Kontrollbyte 0 und 1: Arb..... usw. Ziel- Adr. Quell- Adr. Master 144 bits data CRC Status res. 31 Master 52

53 Zusammenfassung der ausgewählten Bussysteme Quelle: Ruhr-Uni Bochum 53
On-Board Fahrzeugdiagnose
 1 Übersicht 1.Einführung 2.Bussysteme 3.OBD II 4.Zusammenfassung 2 Einführung Haupteinsatzbereiche elektronischer Systeme in Fahrzeugen: Motorsteuerung (Zündung,Einspritzung,...) Steuerung des Fahrverhaltens
1 Übersicht 1.Einführung 2.Bussysteme 3.OBD II 4.Zusammenfassung 2 Einführung Haupteinsatzbereiche elektronischer Systeme in Fahrzeugen: Motorsteuerung (Zündung,Einspritzung,...) Steuerung des Fahrverhaltens
5.1 Fahrzeugelektrik. 5 Kraftfahrzeugelektronik. 5.2 Fahrzeugelektronik. Kraftfahrzeugtechnik 5 Kraftfahrzeugelektronik Herzog
 5 Kraftfahrzeugelektronik 5.1 Fahrzeugelektrik 5.2 Fahrzeugelektronik Anstieg elektrischer Fahrzeugfunktionen Quelle: BMW 5.1 Fahrzeugelektrik Klemmenbezeichnungen und Kabelbaüme Lichtmaschinen Fahrzeugbatterien
5 Kraftfahrzeugelektronik 5.1 Fahrzeugelektrik 5.2 Fahrzeugelektronik Anstieg elektrischer Fahrzeugfunktionen Quelle: BMW 5.1 Fahrzeugelektrik Klemmenbezeichnungen und Kabelbaüme Lichtmaschinen Fahrzeugbatterien
CAN - BUS. Inhaltsverzeichnis
 Inhaltsverzeichnis Überblick CAN Übersicht Bussysteme ISO / OSI Schichtenmodell Physical Layer (Hardwareschicht) Data Layer (Softwareschicht) Application Layer (Anwendungsschicht) Anwendungsgebiete Literaturverzeichnis
Inhaltsverzeichnis Überblick CAN Übersicht Bussysteme ISO / OSI Schichtenmodell Physical Layer (Hardwareschicht) Data Layer (Softwareschicht) Application Layer (Anwendungsschicht) Anwendungsgebiete Literaturverzeichnis
Media Oriented Systems Transport Die MOST-Systembus Architektur
 Fakultät Informatik - Institute für Technische Informatik - VLSI-Entwurfssysteme, Diagnostik und Architekur Die MOST-Systembus Architektur Christian Greth s7277485@mail.inf.tu-dresden.de Dresden, 17. Juni
Fakultät Informatik - Institute für Technische Informatik - VLSI-Entwurfssysteme, Diagnostik und Architekur Die MOST-Systembus Architektur Christian Greth s7277485@mail.inf.tu-dresden.de Dresden, 17. Juni
Bussysteme in der Fahrzeugtechnik
 Werner Zimmermann RalfSchmidgall Bussysteme in der Fahrzeugtechnik Protokolle und Standards Mit 188 Abbildungen und 99 Tabellen 2., aktualisierte und erweiterte Auflage ATZ/MTZ-Fachbuch vieweg IX Inhalt
Werner Zimmermann RalfSchmidgall Bussysteme in der Fahrzeugtechnik Protokolle und Standards Mit 188 Abbildungen und 99 Tabellen 2., aktualisierte und erweiterte Auflage ATZ/MTZ-Fachbuch vieweg IX Inhalt
IPEmotion CAN Bus Traffic Speichern, Auswerten, Simulieren PM 04.05.2016 (V2.3)
") IPEmotion CAN Bus Traffic Speichern, Auswerten, Simulieren PM 04.05.2016 (V2.3) Inhalt 1. Applikationen 2. Funktionsübersicht: Protokolle PlugIn 3. Traffic speichern 4. Traffic analysieren 5. Traffic simulieren
IPEmotion CAN Bus Traffic Speichern, Auswerten, Simulieren PM 04.05.2016 (V2.3) Inhalt 1. Applikationen 2. Funktionsübersicht: Protokolle PlugIn 3. Traffic speichern 4. Traffic analysieren 5. Traffic simulieren
Ausgewählte Kapitel eingebetteter Systeme TTP und FlexRay
 Ausgewählte Kapitel eingebetteter Systeme TTP und FlexRay Richard Membarth 14.06.2006 Inhaltsverzeichnis 1 Einleitung 3 1.1 Allgemein.................................... 3 1.2 Geschichte....................................
Ausgewählte Kapitel eingebetteter Systeme TTP und FlexRay Richard Membarth 14.06.2006 Inhaltsverzeichnis 1 Einleitung 3 1.1 Allgemein.................................... 3 1.2 Geschichte....................................
Seminarwochenende Oktober 2007 AutoLab
 CAN Sebastian Kosch sebastian.kosch@googlemail.com PG Seminarwochenende 21. 23. Oktober 2007 1 Überblick Der CAN Bus Das CAN Protokoll CAN Hardware CAN Software Zusammenfassung Fragen Sebastian Kosch
CAN Sebastian Kosch sebastian.kosch@googlemail.com PG Seminarwochenende 21. 23. Oktober 2007 1 Überblick Der CAN Bus Das CAN Protokoll CAN Hardware CAN Software Zusammenfassung Fragen Sebastian Kosch
Energieeffiziente Empfänger in Sensornetzwerken
 Fakultät Informatik, Institut für Angewandte Informatik, Professur für Technische Informationssysteme Energieeffiziente Empfänger in Sensornetzwerken Dresden, 09.01.2012 Motivation Wie kann man alle Geräte
Fakultät Informatik, Institut für Angewandte Informatik, Professur für Technische Informationssysteme Energieeffiziente Empfänger in Sensornetzwerken Dresden, 09.01.2012 Motivation Wie kann man alle Geräte
B U S S Y S T E M E IN KRAFTFAHRZEUGEN TECHNISCHE UNIVERSITÄT GRAZ
 B U S S Y S T E M E IN KRAFTFAHRZEUGEN TECHNISCHE UNIVERSITÄT GRAZ Institut für Elektronik Michael Hinterberger michael.hinterberger@tugraz.at WICHTIGE BUSSYSTEME IM KFZ CAN LIN FLEXRAY MOST weitere BUSSYSTEME
B U S S Y S T E M E IN KRAFTFAHRZEUGEN TECHNISCHE UNIVERSITÄT GRAZ Institut für Elektronik Michael Hinterberger michael.hinterberger@tugraz.at WICHTIGE BUSSYSTEME IM KFZ CAN LIN FLEXRAY MOST weitere BUSSYSTEME
Hardware-Interfaces für FlexRay und CAN
 Hardware-Interfaces für FlexRay und CAN FlexRay, das Bussystem für hohe Datenraten im Fahrzeug, stellt sehr hohe Anforderungen an die Hardwareschnittstellen. Nutzen Sie die Vector FlexRay Interfaces für
Hardware-Interfaces für FlexRay und CAN FlexRay, das Bussystem für hohe Datenraten im Fahrzeug, stellt sehr hohe Anforderungen an die Hardwareschnittstellen. Nutzen Sie die Vector FlexRay Interfaces für
OSEK-OS. Oliver Botschkowski. oliver.botschkowski@udo.edu. PG AutoLab Seminarwochenende 21.-23. Oktober 2007. AutoLab
 OSEK-OS Oliver Botschkowski oliver.botschkowski@udo.edu PG Seminarwochenende 21.-23. Oktober 2007 1 Überblick Einleitung Motivation Ziele Vorteile Einführung in OSEK-OS Architektur Task Management Interrupt
OSEK-OS Oliver Botschkowski oliver.botschkowski@udo.edu PG Seminarwochenende 21.-23. Oktober 2007 1 Überblick Einleitung Motivation Ziele Vorteile Einführung in OSEK-OS Architektur Task Management Interrupt
Das Bussystem. Leistungsmerkmale und Anwendungen. www.tzm.de. Prof. Dr.-Ing. Osterwinter, Geschäftsleitung Daniel Hotzy, Bereichsleitung FlexRay
 Das Bussystem Leistungsmerkmale und Anwendungen Prof. Dr.-Ing. Osterwinter, Geschäftsleitung Daniel Hotzy, Bereichsleitung FlexRay Robert-Bosch-Str. 6 Fon: +49 (7161) 50 23 0 www.tzm.de TZ Mikroelektronik
Das Bussystem Leistungsmerkmale und Anwendungen Prof. Dr.-Ing. Osterwinter, Geschäftsleitung Daniel Hotzy, Bereichsleitung FlexRay Robert-Bosch-Str. 6 Fon: +49 (7161) 50 23 0 www.tzm.de TZ Mikroelektronik
MIT DEM BUS IM REBREATHER
 MIT DEM BUS IM REBREATHER BUSSYSTEME IN DER REBREATHERTECHNOLOGIE FALKO HÖLTZER Voll geschlossene elektronisch gesteuerte Rebreather mit Bussystem 2 INHALT WARUM GIBT ES BUSSYSTEME? WAS IST DER BUS? I
MIT DEM BUS IM REBREATHER BUSSYSTEME IN DER REBREATHERTECHNOLOGIE FALKO HÖLTZER Voll geschlossene elektronisch gesteuerte Rebreather mit Bussystem 2 INHALT WARUM GIBT ES BUSSYSTEME? WAS IST DER BUS? I
Local Interconnect Network
 Local Interconnect Network PG 522: AutoLab Eine Experimentierplattform für automotive Softwareentwicklung Universität Dortmund WS 2007/2008 und SS 2008 Matthias Meier 2. November 2007 Inhaltsverzeichnis
Local Interconnect Network PG 522: AutoLab Eine Experimentierplattform für automotive Softwareentwicklung Universität Dortmund WS 2007/2008 und SS 2008 Matthias Meier 2. November 2007 Inhaltsverzeichnis
Feldbusanschluss mit Lichtwellenleiter (LWL) in Linien-/Sterntopologie
 in Linien-/Sterntopologie") Feldbusanschluss mit Lichtwellenleiter (LWL) in Linien-/Sterntopologie 1. Verwendung... 1 2. Technische Daten... 2 2.1. LWL-Anschluss-Platine... 2 2.2. Leitungstypen LWL- Anschluss... 2 3. PROFIBUS-Konfiguration...
Feldbusanschluss mit Lichtwellenleiter (LWL) in Linien-/Sterntopologie 1. Verwendung... 1 2. Technische Daten... 2 2.1. LWL-Anschluss-Platine... 2 2.2. Leitungstypen LWL- Anschluss... 2 3. PROFIBUS-Konfiguration...
Zeitgesteuerte Kommunikationssysteme für Hard-Real-Time Anwendungen. Jörn Sellentin
 Zeitgesteuerte Kommunikationssysteme für Hard-Real-Time Anwendungen Jörn Sellentin Agenda Anforderungen an die Kommunikation in Fahrzeugen Verlässliche Kommunikation (Dependability) Fehlertoleranz (Fault
Zeitgesteuerte Kommunikationssysteme für Hard-Real-Time Anwendungen Jörn Sellentin Agenda Anforderungen an die Kommunikation in Fahrzeugen Verlässliche Kommunikation (Dependability) Fehlertoleranz (Fault
Beispiel: Siemens AG 900E03 9 Seiten Update:https://www.hqs.sbt.siemens.com/
 Verwendung des Applikationsprogramms Produktfamilie: Produkttyp: Hersteller: Name: Kontroller Logo Siemens CM EIB/KNX EIB Ein-/Ausgänge Die unten gezeigte Abbildung, zeigt eine mögliche Anwendung. Beispiel:
Verwendung des Applikationsprogramms Produktfamilie: Produkttyp: Hersteller: Name: Kontroller Logo Siemens CM EIB/KNX EIB Ein-/Ausgänge Die unten gezeigte Abbildung, zeigt eine mögliche Anwendung. Beispiel:
OSEK/VDX NM (Network Management)
") OSEK/VDX NM (Network Management) Alexander Berger alexander.berger@uni-dortmund.de PG Seminarwochenende 21.-23. Oktober 2007 1 Überblick Motivation Aufgaben des NM Architektur Konzept und Verhalten Indirektes
OSEK/VDX NM (Network Management) Alexander Berger alexander.berger@uni-dortmund.de PG Seminarwochenende 21.-23. Oktober 2007 1 Überblick Motivation Aufgaben des NM Architektur Konzept und Verhalten Indirektes
Technical Note 0201 Gateway
 Technical Note 0201 Gateway WDGA Drehgeber mit CANopen an Profibus DP - 1 - Inhaltsverzeichnis 1 Allgemeines... 3 1.1 Information... 3 1.2 Hinweis... 3 2 Gateway konfigurieren... 4 2.1 Kommunikationseinstellungen...
Technical Note 0201 Gateway WDGA Drehgeber mit CANopen an Profibus DP - 1 - Inhaltsverzeichnis 1 Allgemeines... 3 1.1 Information... 3 1.2 Hinweis... 3 2 Gateway konfigurieren... 4 2.1 Kommunikationseinstellungen...
3 TECHNISCHER HINTERGRUND
 Techniken und Voraussetzungen 3 TECHNISCHER HINTERGRUND 3.1 Was bedeutet Feldbus-Technik? Die Feldbus-Technik wird zur Datenübertragung zwischen Sensoren / Aktoren und Automatisierungsgeräten, z.b. Speicher-Programmierbaren-
Techniken und Voraussetzungen 3 TECHNISCHER HINTERGRUND 3.1 Was bedeutet Feldbus-Technik? Die Feldbus-Technik wird zur Datenübertragung zwischen Sensoren / Aktoren und Automatisierungsgeräten, z.b. Speicher-Programmierbaren-
Synchronisierung. Kommunikationstechnik, SS 08, Prof. Dr. Stefan Brunthaler 73
 Synchronisierung Kommunikationstechnik, SS 08, Prof. Dr. Stefan Brunthaler 73 Übertragungsprozeduren Die Übertragung einer Nachricht zwischen Sender und Empfänger erfordert die Übertragung des Nutzsignals
Synchronisierung Kommunikationstechnik, SS 08, Prof. Dr. Stefan Brunthaler 73 Übertragungsprozeduren Die Übertragung einer Nachricht zwischen Sender und Empfänger erfordert die Übertragung des Nutzsignals
Netzwerktechnologie 2 Sommersemester 2004
 Netzwerktechnologie 2 Sommersemester 2004 FH-Prof. Dipl.-Ing. Dr. Gerhard Jahn Gerhard.Jahn@fh-hagenberg.at Fachhochschulstudiengänge Software Engineering Software Engineering für Medizin Software Engineering
Netzwerktechnologie 2 Sommersemester 2004 FH-Prof. Dipl.-Ing. Dr. Gerhard Jahn Gerhard.Jahn@fh-hagenberg.at Fachhochschulstudiengänge Software Engineering Software Engineering für Medizin Software Engineering
Bussysteme im Automobil CAN, FlexRay und MOST
 Bussysteme im Automobil CAN, FlexRay und MOST Thomas Dohmke Technische Universität Berlin Fakultät Elektrotechnik und Informatik Fachgebiet Softwaretechnik In Zusammenarbeit mit der
Bussysteme im Automobil CAN, FlexRay und MOST Thomas Dohmke Technische Universität Berlin Fakultät Elektrotechnik und Informatik Fachgebiet Softwaretechnik In Zusammenarbeit mit der
Fakultät für Elektrotechnik Institut für industrielle Datentechnik und Kommunikation Prof. Dr. Hermann Merz. Lösungen zu den Aufgaben in Kapitel 3
 Aufgabe 3.1 Entwerfen Sie für die in Abschnitt 3.2.2 beschriebene Treppenhaus- und Flurbeleuchtung in einem Mehrfamilienhaus eine mögliche KNX-Anlage. Setzen Sie 2-fach-Taster und 6-fach-Schaltaktoren
Aufgabe 3.1 Entwerfen Sie für die in Abschnitt 3.2.2 beschriebene Treppenhaus- und Flurbeleuchtung in einem Mehrfamilienhaus eine mögliche KNX-Anlage. Setzen Sie 2-fach-Taster und 6-fach-Schaltaktoren
B U S S Y S T E M E IN KRAFTFAHRZEUGEN
 B U S S Y S T E M E IN KRAFTFAHRZEUGEN TECHNISCHE UNIVERSITÄT GRAZ Institut für Elektronik Michael Hinterberger michael.hinterberger@tugraz.at WICHTIGE BUSSYSTEME IM KFZ CAN LIN FLEXRAY MOST weitere BUSSYSTEME
B U S S Y S T E M E IN KRAFTFAHRZEUGEN TECHNISCHE UNIVERSITÄT GRAZ Institut für Elektronik Michael Hinterberger michael.hinterberger@tugraz.at WICHTIGE BUSSYSTEME IM KFZ CAN LIN FLEXRAY MOST weitere BUSSYSTEME
Kurzanleitung. Kurzanleitung. Version. 1de. www.helmholz.de
 Kurzanleitung Version 1de www.helmholz.de Anwendung und Funktionsbeschreibung Der OPTopus PROFIBUS Optical Link ist trotz seiner kleinen Bauweise ein ganz normaler PROFIBUS Repeater. Er ermöglicht die
Kurzanleitung Version 1de www.helmholz.de Anwendung und Funktionsbeschreibung Der OPTopus PROFIBUS Optical Link ist trotz seiner kleinen Bauweise ein ganz normaler PROFIBUS Repeater. Er ermöglicht die
ICCS SSP 10. Merkmale. Anwendungsbeispiele
 ICCS Standard Switch Panel mit 10 Tasten (SSP10) gehört zu der ICCS (Intelligent Control and Command Systems) Produktgruppe. Es kann entweder als selbständiges Modul oder als Erweiterung zu bestehenden
ICCS Standard Switch Panel mit 10 Tasten (SSP10) gehört zu der ICCS (Intelligent Control and Command Systems) Produktgruppe. Es kann entweder als selbständiges Modul oder als Erweiterung zu bestehenden
Manchester Codierung sowie Differenzielle Manchester Codierung
 Manchester Codierung sowie Differenzielle Manchester Codierung Nadine Sass 1 von 8 Inhaltsverzeichnis Inhaltsverzeichnis... 2 Abbildungsverzeichnis... 3 Das Ethernet... 4 Das IEEE 802.3 Ethernet Paketformat...
Manchester Codierung sowie Differenzielle Manchester Codierung Nadine Sass 1 von 8 Inhaltsverzeichnis Inhaltsverzeichnis... 2 Abbildungsverzeichnis... 3 Das Ethernet... 4 Das IEEE 802.3 Ethernet Paketformat...
3.14 Die Programmieroberfläche Programmierung
 121 3.14 Die Programmieroberfläche Programmierung Besonderheiten Die Oberflächen der einzelnen Quellen (3S, KW-Software, Siemens-TIA-Portal, logi.cad 3, PAS4000) sind in sich unterschiedlich. Aber auch
121 3.14 Die Programmieroberfläche Programmierung Besonderheiten Die Oberflächen der einzelnen Quellen (3S, KW-Software, Siemens-TIA-Portal, logi.cad 3, PAS4000) sind in sich unterschiedlich. Aber auch
Vernetzte Systeme Touran und Golf ab 2003
 Arbeitsblatt 1 4.3 Signalerzeugung (Local Interconnect Network) 4.3.1 Grundsätzlicher Aufbau der Vernetzung Das ist die preisgünstige Alternative zum CAN und verbindet über kurze Entfernungen Steuerelemente
Arbeitsblatt 1 4.3 Signalerzeugung (Local Interconnect Network) 4.3.1 Grundsätzlicher Aufbau der Vernetzung Das ist die preisgünstige Alternative zum CAN und verbindet über kurze Entfernungen Steuerelemente
Effiziente Ankopplung eines zeitgesteuerten Feldbusses an ein Echtzeitbetriebssystem
 Effiziente Ankopplung eines zeitgesteuerten Feldbusses an ein Echtzeitbetriebssystem Björn Pietsch Universität Hannover Amos Albert Robert Bosch GmbH 1 Gliederung Zeitgesteuerte Bussysteme Bisherige Lösungen
Effiziente Ankopplung eines zeitgesteuerten Feldbusses an ein Echtzeitbetriebssystem Björn Pietsch Universität Hannover Amos Albert Robert Bosch GmbH 1 Gliederung Zeitgesteuerte Bussysteme Bisherige Lösungen
1. PROFIBUS DP (DEZENTRALE PERIPHERIE)
") DER PROFIBUS PROFIBUS ist ein Bussystem das sowohl im Feldbereich als auch für Zellennetze mit wenigen Teilnehmern eingesetzt wird. Für den PROFIBUS gibt es drei Protokollprofile die gemeinsam auf einer
DER PROFIBUS PROFIBUS ist ein Bussystem das sowohl im Feldbereich als auch für Zellennetze mit wenigen Teilnehmern eingesetzt wird. Für den PROFIBUS gibt es drei Protokollprofile die gemeinsam auf einer
1.1. Aufschriften auf der Außenseite von ME-Geräten oder ME-Geräte-Teilen
 1. Bezeichnung, Aufschriften und Begleitpapiere 1.1. Aufschriften auf der Außenseite von ME-Geräten oder ME-Geräte-Teilen 1.1.1. Aufschriften auf der Außenseite von ME-Geräten oder ME-Geräte-Teilen, die
1. Bezeichnung, Aufschriften und Begleitpapiere 1.1. Aufschriften auf der Außenseite von ME-Geräten oder ME-Geräte-Teilen 1.1.1. Aufschriften auf der Außenseite von ME-Geräten oder ME-Geräte-Teilen, die
Installationsanleitung für das KKL bzw. AGV4000 Interface
 Installationsanleitung für das KKL bzw. AGV4000 Interface Diese Anleitung ist unter Windows XP erstellt worden, ist aber auch übertragbar auf Windows 2000/ Vista / Windows 7. Je nach Einstellungen des
Installationsanleitung für das KKL bzw. AGV4000 Interface Diese Anleitung ist unter Windows XP erstellt worden, ist aber auch übertragbar auf Windows 2000/ Vista / Windows 7. Je nach Einstellungen des
Protokollbeschreibung Modbus TCP für EMU TCP/IP Modul
 Protokollbeschreibung Modbus TCP für EMU TCP/IP Modul Zweck: Dieses Protokollbeschreibung beschreibt den Aufbau des Modbus TCP Protokolls. Datei: EMU Professional Modbus TCP d Seite 1 von 15 Version 1.0
Protokollbeschreibung Modbus TCP für EMU TCP/IP Modul Zweck: Dieses Protokollbeschreibung beschreibt den Aufbau des Modbus TCP Protokolls. Datei: EMU Professional Modbus TCP d Seite 1 von 15 Version 1.0
Local Control Network
 Netzspannungsüberwachung (Stromausfallerkennung) Die Aufgabe Nach einem Stromausfall soll der Status von Aktoren oder Funktionen wieder so hergestellt werden, wie er vor dem Stromausfall war. Die Netzspannungsüberwachung
Netzspannungsüberwachung (Stromausfallerkennung) Die Aufgabe Nach einem Stromausfall soll der Status von Aktoren oder Funktionen wieder so hergestellt werden, wie er vor dem Stromausfall war. Die Netzspannungsüberwachung
Softwareentwicklungspraktikum Sommersemester 2007. Grobentwurf
 Softwareentwicklungspraktikum Sommersemester 2007 Grobentwurf Auftraggeber Technische Universität Braunschweig
Softwareentwicklungspraktikum Sommersemester 2007 Grobentwurf Auftraggeber Technische Universität Braunschweig
-Cruise CAN. Einbauanleitung
 -Cruise CAN Einbauanleitung VW Crafter Man. Gear Modell 2006 > Mercedes Sprinter Man. Gear Modell 2006 > Mercedes Vito Man. Gear Modell 2003-2014 Mercedes Viano Man. Gear Modell 2003-2014 Signale auf CAN:
-Cruise CAN Einbauanleitung VW Crafter Man. Gear Modell 2006 > Mercedes Sprinter Man. Gear Modell 2006 > Mercedes Vito Man. Gear Modell 2003-2014 Mercedes Viano Man. Gear Modell 2003-2014 Signale auf CAN:
Produktinformation TROXNETCOM-AS-Interface Planung
 TROX GmbH Heinrich-Trox-Platz 47504 Neukirchen-Vluyn Telefon +49(0)28 45/ 2 02-0 Telefax +49(0)28 45/2 02-2 65 e-mail trox@trox.de www.trox.de Produktinformation sleitfaden Folgende Fragen sollten zu Beginn
TROX GmbH Heinrich-Trox-Platz 47504 Neukirchen-Vluyn Telefon +49(0)28 45/ 2 02-0 Telefax +49(0)28 45/2 02-2 65 e-mail trox@trox.de www.trox.de Produktinformation sleitfaden Folgende Fragen sollten zu Beginn
Dokumentation. Black- und Whitelists. Absenderadressen auf eine Blacklist oder eine Whitelist setzen. Zugriff per Webbrowser
 Dokumentation Black- und Whitelists Absenderadressen auf eine Blacklist oder eine Whitelist setzen. Zugriff per Webbrowser Inhalt INHALT 1 Kategorie Black- und Whitelists... 2 1.1 Was sind Black- und Whitelists?...
Dokumentation Black- und Whitelists Absenderadressen auf eine Blacklist oder eine Whitelist setzen. Zugriff per Webbrowser Inhalt INHALT 1 Kategorie Black- und Whitelists... 2 1.1 Was sind Black- und Whitelists?...
s.beat DAP-10X White Paper USB Stromversorgung am Apple Macintosh und deren Auswirkung
 White Paper s.beat DAP-10X USB Stromversorgung am Apple Macintosh und deren Auswirkung Date: 19 May 2006 Version: 1.0 Sprache: Deutsch Disposition: öffentlich Dokument: sbeat_dap-10x_mac_information_2006-25-04_de.doc
White Paper s.beat DAP-10X USB Stromversorgung am Apple Macintosh und deren Auswirkung Date: 19 May 2006 Version: 1.0 Sprache: Deutsch Disposition: öffentlich Dokument: sbeat_dap-10x_mac_information_2006-25-04_de.doc
Bussysteme in der Fahrzeugtechnik
 Werner Zimmermann Ralf Schmidgall, ri V Bussysteme in der Fahrzeugtechnik Protokolle und Standards 3., aktualisierte und erweiterte Auflage Mit 224 Abbildungen und 96 Tabellen PRAXIS ATZ/MTZ-Fachbuch VIEWEG+
Werner Zimmermann Ralf Schmidgall, ri V Bussysteme in der Fahrzeugtechnik Protokolle und Standards 3., aktualisierte und erweiterte Auflage Mit 224 Abbildungen und 96 Tabellen PRAXIS ATZ/MTZ-Fachbuch VIEWEG+
das ABS kontrolliert ob Fehler da sind (sieht man an den ABS Warnlampen)
") ABS-Diagnose Anleitung für ABS2- Diagnose Achtung Wenn man am ABS System arbeitet, muss man genau die Anweisungen in dieser Anleitungen befolgen. Da es sich hier um eine Bremsanlage handelt sollten nur
ABS-Diagnose Anleitung für ABS2- Diagnose Achtung Wenn man am ABS System arbeitet, muss man genau die Anweisungen in dieser Anleitungen befolgen. Da es sich hier um eine Bremsanlage handelt sollten nur
WLAN Konfiguration. Michael Bukreus 2014. Seite 1
 WLAN Konfiguration Michael Bukreus 2014 Seite 1 Inhalt Begriffe...3 Was braucht man für PureContest...4 Netzwerkkonfiguration...5 Sicherheit...6 Beispielkonfiguration...7 Screenshots Master Accesspoint...8
WLAN Konfiguration Michael Bukreus 2014 Seite 1 Inhalt Begriffe...3 Was braucht man für PureContest...4 Netzwerkkonfiguration...5 Sicherheit...6 Beispielkonfiguration...7 Screenshots Master Accesspoint...8
Befehlssatz zum High Speed Interface-88-USB (HSI-88-USB) (ab Firmware 0.71) (Version 1.2)
 (ab Firmware 0.71) (Version 1.2)") Kurzbeschreibung: Befehlssatz zum High Speed Interface-88-USB (HSI-88-USB) (ab Firmware 0.71) (Version 1.2) Beim HSI-88-USB handelt es sich um ein Interface vom s88-rückmeldebus zum Universal Serial Bus
Kurzbeschreibung: Befehlssatz zum High Speed Interface-88-USB (HSI-88-USB) (ab Firmware 0.71) (Version 1.2) Beim HSI-88-USB handelt es sich um ein Interface vom s88-rückmeldebus zum Universal Serial Bus
Willkommen. in der Welt der Hütten- und Walzwerks-Technologie. Moderne Automatisierungstopologien mit Echtzeit Ethernet am Beispiel EtherCAT
 Willkommen in der Welt der Hütten- und Walzwerks-Technologie Moderne Automatisierungstopologien mit Echtzeit Ethernet am Beispiel EtherCAT Rückblick: 20 Jahre Feldbus Bis 1989: -Zentrale Automatisierungssysteme
Willkommen in der Welt der Hütten- und Walzwerks-Technologie Moderne Automatisierungstopologien mit Echtzeit Ethernet am Beispiel EtherCAT Rückblick: 20 Jahre Feldbus Bis 1989: -Zentrale Automatisierungssysteme
hanazeder Montage, Anschluss HLC-EA-MP hanazeder electronic GmbH J.M. Dimmel Str. 10 4910 Ried i. I.
 hanazeder hanazeder electronic GmbH J.M. Dimmel Str. 10 4910 Ried i. I. HLC-EA- Tel.: +43 7752 84 214 Fax.: +43 7752 84 214 4 www.hanazeder.at office@hanazeder.at Montage, Anschluss 1 Das HLC-EA- Modul
hanazeder hanazeder electronic GmbH J.M. Dimmel Str. 10 4910 Ried i. I. HLC-EA- Tel.: +43 7752 84 214 Fax.: +43 7752 84 214 4 www.hanazeder.at office@hanazeder.at Montage, Anschluss 1 Das HLC-EA- Modul
A. Ersetzung einer veralteten Govello-ID ( Absenderadresse )
") Die Versendung von Eintragungsnachrichten und sonstigen Nachrichten des Gerichts über EGVP an den Notar ist nicht möglich. Was kann der Notar tun, um den Empfang in seinem Postfach zu ermöglichen? In zahlreichen
Die Versendung von Eintragungsnachrichten und sonstigen Nachrichten des Gerichts über EGVP an den Notar ist nicht möglich. Was kann der Notar tun, um den Empfang in seinem Postfach zu ermöglichen? In zahlreichen
C.M.I. Control and Monitoring Interface. Zusatzanleitung: Datentransfer mit CAN over Ethernet (COE) Version 1.08
 Version 1.08") C.M.I. Version 1.08 Control and Monitoring Interface Zusatzanleitung: Datentransfer mit CAN over Ethernet (COE) de LAN LAN Beschreibung der Datentransfermethode Mit dieser Methode ist es möglich, analoge
C.M.I. Version 1.08 Control and Monitoring Interface Zusatzanleitung: Datentransfer mit CAN over Ethernet (COE) de LAN LAN Beschreibung der Datentransfermethode Mit dieser Methode ist es möglich, analoge
Fakultät für Technik Bereich Informationstechnik Labor Bussysteme Versuch 2 CAN 1 Teilnehmer: Vorname Nachname Matrikel Nummer Datum:
 Fakultät für Technik Bereich Informationstechnik Versuch 2 CAN 1 Teilnehmer: Vorname Nachname Matrikel Nummer Datum: Inhalt 1 Vorbemerkungen... 3 1.1 Einleitung... 3 1.2 Ziel der Versuche... 3 2 Vorbereitung...
Fakultät für Technik Bereich Informationstechnik Versuch 2 CAN 1 Teilnehmer: Vorname Nachname Matrikel Nummer Datum: Inhalt 1 Vorbemerkungen... 3 1.1 Einleitung... 3 1.2 Ziel der Versuche... 3 2 Vorbereitung...
CAN im Auto. Studienarbeit. Embedded Control 5. Semester
 Berner Fachhochschule Hochschule für Technik und Informatik Fachbereich Elektro- und Kommunikationstechnik Studienarbeit CAN im Auto Embedded Control 5. Semester Autor Christian Meister Klasse E3b Dozent
Berner Fachhochschule Hochschule für Technik und Informatik Fachbereich Elektro- und Kommunikationstechnik Studienarbeit CAN im Auto Embedded Control 5. Semester Autor Christian Meister Klasse E3b Dozent
Bei Verwendung der Kaskade dürfen nur am letzten Baustein die Ausgänge A1-A4 verwendet werden!
 Alarm Meldelinie Autor: Alexander Kirpal (KNET) www.kirpal.net 2014 Beschreibung Mit der Alarm Meldelinie können die verschiedenen Melder simpel zusammengeschalten werden. Es stehen unterschiedlicher Melder
Alarm Meldelinie Autor: Alexander Kirpal (KNET) www.kirpal.net 2014 Beschreibung Mit der Alarm Meldelinie können die verschiedenen Melder simpel zusammengeschalten werden. Es stehen unterschiedlicher Melder
GEZIELT MEHR SICHERHEIT MIT 4I ACCESS SERVER & 4I CONNECT CLIENT
 Seite 1/7 GEZIELT MEHR SICHERHEIT MIT 4I ACCESS SERVER & 4I CONNECT CLIENT ZENTRAL LOKALE MANAGEMENT-PLATTFORM FÜR EINE W ELTWEIT SICHERE INDUSTRIELLE KOMMUNIKATION. Seite 2/7 Auf den folgenden Seiten
Seite 1/7 GEZIELT MEHR SICHERHEIT MIT 4I ACCESS SERVER & 4I CONNECT CLIENT ZENTRAL LOKALE MANAGEMENT-PLATTFORM FÜR EINE W ELTWEIT SICHERE INDUSTRIELLE KOMMUNIKATION. Seite 2/7 Auf den folgenden Seiten
Betriebsanleitung Modbus-Konverter Unigate-CL-RS
 BA_MODBUS-Gateway 2011-12-16.doc, Stand: 16.12.2011 (Technische Änderungen vorbehalten) 1 Einleitung Das Unigate-CL-RS Modul fungiert als Gateway zwischen der ExTox RS232 Schnittstelle und dem Kundenbussystem
BA_MODBUS-Gateway 2011-12-16.doc, Stand: 16.12.2011 (Technische Änderungen vorbehalten) 1 Einleitung Das Unigate-CL-RS Modul fungiert als Gateway zwischen der ExTox RS232 Schnittstelle und dem Kundenbussystem
Sensor board EB003-00-2
 Sensor board EB003-00-2 Inhalt 1. Über dieses Dokument...2 2. Allgemeine Information...3 3. Board-Layout...4 4. Schaltungsbeschreibung...5 Anhang 1 Schaltplan Copyright Matrix Multimedia Limited 2005 seite
Sensor board EB003-00-2 Inhalt 1. Über dieses Dokument...2 2. Allgemeine Information...3 3. Board-Layout...4 4. Schaltungsbeschreibung...5 Anhang 1 Schaltplan Copyright Matrix Multimedia Limited 2005 seite
MODBUS/TCP und Beckhoff Steuerelemente
 MODBUS/TCP und Beckhoff Steuerelemente Die 1.7.5 Version wurde zum DOMIQ/Base Modul die Funktion der Bedienung des MOD- BUS/TCP und MODBUS/UDP Protokolls hinzugefügt. Das Base Modul erfüllt die Rolle des
MODBUS/TCP und Beckhoff Steuerelemente Die 1.7.5 Version wurde zum DOMIQ/Base Modul die Funktion der Bedienung des MOD- BUS/TCP und MODBUS/UDP Protokolls hinzugefügt. Das Base Modul erfüllt die Rolle des
DELFI. Benutzeranleitung Dateiversand für unsere Kunden. Grontmij GmbH. Postfach 34 70 17 28339 Bremen. Friedrich-Mißler-Straße 42 28211 Bremen
 Grontmij GmbH Postfach 34 70 17 28339 Bremen Friedrich-Mißler-Straße 42 28211 Bremen T +49 421 2032-6 F +49 421 2032-747 E info@grontmij.de W www.grontmij.de DELFI Benutzeranleitung Dateiversand für unsere
Grontmij GmbH Postfach 34 70 17 28339 Bremen Friedrich-Mißler-Straße 42 28211 Bremen T +49 421 2032-6 F +49 421 2032-747 E info@grontmij.de W www.grontmij.de DELFI Benutzeranleitung Dateiversand für unsere
WINLINK 2000 SPAM-KONTROLLE UND NACHRICHTEN PRIORITÄTEN Aktualisiert 27. März 2012
 WINLINK 2000 SPAM-KONTROLLE UND NACHRICHTEN PRIORITÄTEN Aktualisiert 27. März 2012 AB SOFORT IST DIE WHITELIST FÜR JEDEN BENUTZER OBLIGATORISCH. Das weisse Liste System betrifft Adressen aus dem INTERNET.
WINLINK 2000 SPAM-KONTROLLE UND NACHRICHTEN PRIORITÄTEN Aktualisiert 27. März 2012 AB SOFORT IST DIE WHITELIST FÜR JEDEN BENUTZER OBLIGATORISCH. Das weisse Liste System betrifft Adressen aus dem INTERNET.
Enigmail Konfiguration
 Enigmail Konfiguration 11.06.2006 Steffen.Teubner@Arcor.de Enigmail ist in der Grundkonfiguration so eingestellt, dass alles funktioniert ohne weitere Einstellungen vornehmen zu müssen. Für alle, die es
Enigmail Konfiguration 11.06.2006 Steffen.Teubner@Arcor.de Enigmail ist in der Grundkonfiguration so eingestellt, dass alles funktioniert ohne weitere Einstellungen vornehmen zu müssen. Für alle, die es
Wiederverwendung von automotive Software- Reifegradmodell, Technologie, Praxisbericht
 Wiederverwendung von automotive - Reifegradmodell, Technologie, Praxisbericht Dr. Thomas Zurawka, HdT Elektronik im Kfz, Dresden, 24.06.2009 ECU SW Architektur & SW Entwicklungsprozess Anforderungs- Analyse
Wiederverwendung von automotive - Reifegradmodell, Technologie, Praxisbericht Dr. Thomas Zurawka, HdT Elektronik im Kfz, Dresden, 24.06.2009 ECU SW Architektur & SW Entwicklungsprozess Anforderungs- Analyse
WLAN. 1. Definition. 3. Nutzungsmöglichkeiten
 WLAN 1. Definition Wlan bedeutet Wireless Local Area Network. Gemeint ist ein lokales Netzwerk, in dem mehrere Computer miteinander verbunden sind, und in dem Daten statt per Kabel per Funk übertragen
WLAN 1. Definition Wlan bedeutet Wireless Local Area Network. Gemeint ist ein lokales Netzwerk, in dem mehrere Computer miteinander verbunden sind, und in dem Daten statt per Kabel per Funk übertragen
MSXFORUM - Exchange Server 2003 > SMTP Konfiguration von Exchange 2003
 Page 1 of 8 SMTP Konfiguration von Exchange 2003 Kategorie : Exchange Server 2003 Veröffentlicht von webmaster am 25.02.2005 SMTP steht für Simple Mail Transport Protocol, welches ein Protokoll ist, womit
Page 1 of 8 SMTP Konfiguration von Exchange 2003 Kategorie : Exchange Server 2003 Veröffentlicht von webmaster am 25.02.2005 SMTP steht für Simple Mail Transport Protocol, welches ein Protokoll ist, womit
DMR Technische Grundlagen
 DMR Technische Grundlagen Im Rahmen des ersten Berliner DMR Treffens DL3OCK Berlin, 20. September 2014 Modulation D-STAR Symbolrate 4800 Baud Gaußimpuls mit B3dBT = 0.5 HF-Bandbreite < 5KHz DMR Symbolrate
DMR Technische Grundlagen Im Rahmen des ersten Berliner DMR Treffens DL3OCK Berlin, 20. September 2014 Modulation D-STAR Symbolrate 4800 Baud Gaußimpuls mit B3dBT = 0.5 HF-Bandbreite < 5KHz DMR Symbolrate
Ein einfaches Modell zur Fehlerfortpflanzung
 Ein einfaches Modell zur Fehlerfortpflanzung Jens Chr. Lisner lisner@dc.uni-due.de ICB / Universität Duisburg-Essen AK Fehlertoleranz 11/2006 p. Problemstellung Üblich bei der Formalisierung von Systemen:
Ein einfaches Modell zur Fehlerfortpflanzung Jens Chr. Lisner lisner@dc.uni-due.de ICB / Universität Duisburg-Essen AK Fehlertoleranz 11/2006 p. Problemstellung Üblich bei der Formalisierung von Systemen:
Autoradio On Off Schaltung
 Autoradio On Off Schaltung Konzeption, Anleitung und Hinweise Christian Schönig Schöneberger Str. 20 82377 Penzberg Inhalt 1. MOTIVATION... 3 1.1. AKTUELLER STAND BEI HERSTELLER RADIO... 3 1.2. ANSCHLUSS
Autoradio On Off Schaltung Konzeption, Anleitung und Hinweise Christian Schönig Schöneberger Str. 20 82377 Penzberg Inhalt 1. MOTIVATION... 3 1.1. AKTUELLER STAND BEI HERSTELLER RADIO... 3 1.2. ANSCHLUSS
Kostenloser Apple-Softclient zur Nutzung von TeSign
 Kostenloser Apple-Softclient zur Nutzung von TeSign Mit dem kostenlosen Jitsi 2.x für Mac können Sie den Tess - Relay-Dienst TeSign auch mit Ihrem Apple-PC oder Apple-Notebook nutzen. Sie benötigen dafür
Kostenloser Apple-Softclient zur Nutzung von TeSign Mit dem kostenlosen Jitsi 2.x für Mac können Sie den Tess - Relay-Dienst TeSign auch mit Ihrem Apple-PC oder Apple-Notebook nutzen. Sie benötigen dafür
BANKETTprofi Telefonschnittstelle
 BANKETTprofi Telefonschnittstelle Aufbau der BANKETTprofi Telefonschnittstelle BANKETTprofi 800 Anwendung Im BANKETTprofi wird eine Rufnummer angewählt BANKETTprofi TAPI-Plugin Dieser Befehl wird vom TAPI-Plugin
BANKETTprofi Telefonschnittstelle Aufbau der BANKETTprofi Telefonschnittstelle BANKETTprofi 800 Anwendung Im BANKETTprofi wird eine Rufnummer angewählt BANKETTprofi TAPI-Plugin Dieser Befehl wird vom TAPI-Plugin
T est of 1GBit/s Fiber optical communication interfaces based on FlexRIO R Series
 T est of 1GBit/s Fiber optical communication interfaces based on FlexRIO R Series Inhalt 1. Einführung... 2 2. Anforderungen... 2 3. Komponenten... 3 3.1. PXI 7952R... 3 3.2. Fiber Optical Interface Module
T est of 1GBit/s Fiber optical communication interfaces based on FlexRIO R Series Inhalt 1. Einführung... 2 2. Anforderungen... 2 3. Komponenten... 3 3.1. PXI 7952R... 3 3.2. Fiber Optical Interface Module
Neue LWL-Komponenten überwinden Grenzen
 FiberInterfaces von Hirschmann Neue LWL-Komponenten überwinden Grenzen Den Eintritt in bisher aus übertragungstechnischen Gründen unzugängliche Marktsegmente ermöglicht Hirschmann jetzt mit neuartigen
FiberInterfaces von Hirschmann Neue LWL-Komponenten überwinden Grenzen Den Eintritt in bisher aus übertragungstechnischen Gründen unzugängliche Marktsegmente ermöglicht Hirschmann jetzt mit neuartigen
AGROPLUS Buchhaltung. Daten-Server und Sicherheitskopie. Version vom 21.10.2013b
 AGROPLUS Buchhaltung Daten-Server und Sicherheitskopie Version vom 21.10.2013b 3a) Der Daten-Server Modus und der Tresor Der Daten-Server ist eine Betriebsart welche dem Nutzer eine grosse Flexibilität
AGROPLUS Buchhaltung Daten-Server und Sicherheitskopie Version vom 21.10.2013b 3a) Der Daten-Server Modus und der Tresor Der Daten-Server ist eine Betriebsart welche dem Nutzer eine grosse Flexibilität
Im Netz der Fehler Herausforderungen beim Test von Automotive-Baugruppen Dipl.-Ing. Jens Münzberg
 Im Netz der Fehler Herausforderungen beim Test von Automotive-Baugruppen Dipl.-Ing. Jens Münzberg Agenda Besonderheiten der Automobilelektronik Moderne EE - Funktionalitäten Testszenarien / Testumfänge
Im Netz der Fehler Herausforderungen beim Test von Automotive-Baugruppen Dipl.-Ing. Jens Münzberg Agenda Besonderheiten der Automobilelektronik Moderne EE - Funktionalitäten Testszenarien / Testumfänge
Mikrocontroller. CAN- Controller
 Arbeitsblatt 1 4.2 Signalerzeugung CAN-Antrieb 4.2.1 Transceiver 4.2.1.1 Arbeitsweise des Transceivers Der Transceiver für den CAN-Antrieb besteht wie der Transceiver beim CAN-Komfort aus einem Leitungstreiber,
Arbeitsblatt 1 4.2 Signalerzeugung CAN-Antrieb 4.2.1 Transceiver 4.2.1.1 Arbeitsweise des Transceivers Der Transceiver für den CAN-Antrieb besteht wie der Transceiver beim CAN-Komfort aus einem Leitungstreiber,
Dokumentation IBIS Monitor
 Dokumentation IBIS Monitor Seite 1 von 16 11.01.06 Inhaltsverzeichnis 1. Allgemein 2. Installation und Programm starten 3. Programmkonfiguration 4. Aufzeichnung 4.1 Aufzeichnung mitschneiden 4.1.1 Inhalt
Dokumentation IBIS Monitor Seite 1 von 16 11.01.06 Inhaltsverzeichnis 1. Allgemein 2. Installation und Programm starten 3. Programmkonfiguration 4. Aufzeichnung 4.1 Aufzeichnung mitschneiden 4.1.1 Inhalt
Farbkodierte LEDs zeigen den aktuellen Zustand des Konverters an und können zur Fehlerdiagnose im Netzwerk herangezogen werden.
 Ethernet Medienkonverter 100Base-FX/100Base-TX MICROSENS Allgemeines Der MICROSENS Medienkonverter ermöglicht die direkte Kopplung von Twisted-Pair- Kabel (100Base-TX) und Multimode- bzw. Monomode-Glasfaser
Ethernet Medienkonverter 100Base-FX/100Base-TX MICROSENS Allgemeines Der MICROSENS Medienkonverter ermöglicht die direkte Kopplung von Twisted-Pair- Kabel (100Base-TX) und Multimode- bzw. Monomode-Glasfaser
Rundum-G. Die Anforderungen durch ständig steigende
 Rundum-G LevelOne bietet für jede Netzwerkanwendung alles aus einer Hand. Produkte, Schulungen und die individuelle Projektunterstützung für den Fachhandel. Die Anforderungen durch ständig steigende Produktangebote
Rundum-G LevelOne bietet für jede Netzwerkanwendung alles aus einer Hand. Produkte, Schulungen und die individuelle Projektunterstützung für den Fachhandel. Die Anforderungen durch ständig steigende Produktangebote
BNC-, RJ45-, und Glasfaser- Netzwerkkarten
 Andreas Siebold Seite 1 01.09.2003 BNC-, RJ45-, und Glasfaser- Netzwerkkarten Eine Netzwerkkarte (Netzwerkadapter) stellt die Verbindung des Computers mit dem Netzwerk her. Die Hauptaufgaben von Netzwerkkarten
Andreas Siebold Seite 1 01.09.2003 BNC-, RJ45-, und Glasfaser- Netzwerkkarten Eine Netzwerkkarte (Netzwerkadapter) stellt die Verbindung des Computers mit dem Netzwerk her. Die Hauptaufgaben von Netzwerkkarten
Programmierung mit NQC: Kommunikation zwischen zwei RCX
 Programmierung mit NQC: Kommunikation zwischen zwei RCX Martin Schmidt Aufbau der Messages Messages müssen möglichst kurz sein und dürfen nicht zu häufig gesendet werden! 1 Byte reicht für unsere Zwecke
Programmierung mit NQC: Kommunikation zwischen zwei RCX Martin Schmidt Aufbau der Messages Messages müssen möglichst kurz sein und dürfen nicht zu häufig gesendet werden! 1 Byte reicht für unsere Zwecke
ADSL Leistungsbeschreibung
 ADSL Leistungsbeschreibung Stand 01.08.2010 INHALTSVERZEICHNIS 1 Einleitung...2 2 Beschreibung...2 3 Datentransfervolumen...2 4 Endgeräte...3 5 Voraussetzungen für den Betrieb...3 6 Mindestvertragsdauer...3
ADSL Leistungsbeschreibung Stand 01.08.2010 INHALTSVERZEICHNIS 1 Einleitung...2 2 Beschreibung...2 3 Datentransfervolumen...2 4 Endgeräte...3 5 Voraussetzungen für den Betrieb...3 6 Mindestvertragsdauer...3
Serielle Busse Serielle Busse Hands-On Training
 Einführung Serielle Busse Bus Systeme am Beispiel Kfz I2C Bus SPI Bus LIN Bus Zur Auswahl auf den entsprechenden Bus klicken! CAN Bus I2C- Bus Einleitung Inter-Integrated Circuit Anwendungsgebiet Inter
Einführung Serielle Busse Bus Systeme am Beispiel Kfz I2C Bus SPI Bus LIN Bus Zur Auswahl auf den entsprechenden Bus klicken! CAN Bus I2C- Bus Einleitung Inter-Integrated Circuit Anwendungsgebiet Inter
"Memory Stick" zur Programmierung der comfort 8+ Lichtsteuranlage mit PC Software "scenes editor"
 comfort 8+ IRPC "Memory Stick" zur Programmierung der comfort 8+ Lichtsteuranlage mit PC Software "scenes editor" 1: Programmstart, Einstellungen 1.1 Zuerst die Software der beiliegenden CD-ROM auf einem
comfort 8+ IRPC "Memory Stick" zur Programmierung der comfort 8+ Lichtsteuranlage mit PC Software "scenes editor" 1: Programmstart, Einstellungen 1.1 Zuerst die Software der beiliegenden CD-ROM auf einem
Downloadfehler in DEHSt-VPSMail. Workaround zum Umgang mit einem Downloadfehler
 Downloadfehler in DEHSt-VPSMail Workaround zum Umgang mit einem Downloadfehler Downloadfehler bremen online services GmbH & Co. KG Seite 2 Inhaltsverzeichnis Vorwort...3 1 Fehlermeldung...4 2 Fehlerbeseitigung...5
Downloadfehler in DEHSt-VPSMail Workaround zum Umgang mit einem Downloadfehler Downloadfehler bremen online services GmbH & Co. KG Seite 2 Inhaltsverzeichnis Vorwort...3 1 Fehlermeldung...4 2 Fehlerbeseitigung...5
Haben Sie über elektronisches Schließfachmanagement nachgedacht? Ein Schließfach ist ohne ein solides Schloss nicht komplett.
 Haben Sie über elektronisches Schließfachmanagement nachgedacht? Ein Schließfach ist ohne ein solides Schloss nicht komplett. Ein benutzerfreundliches Schloss, das den Benutzern das Gefühl vermittelt,
Haben Sie über elektronisches Schließfachmanagement nachgedacht? Ein Schließfach ist ohne ein solides Schloss nicht komplett. Ein benutzerfreundliches Schloss, das den Benutzern das Gefühl vermittelt,
RO-Serie CAN-Übertragungsprotokoll
 RO-Serie CAN-Übertragungsprotokoll Juni 2009 1 EINLEITUNG...3 2 REGISTER-ZUGRIFFE...4 2.1 Was sind überhaupt Register?... 4 2.2 Registerzugriff mit 8/ 16 oder 32 Bit-Datenbreite... 4 2.3 Registerbelegung...
RO-Serie CAN-Übertragungsprotokoll Juni 2009 1 EINLEITUNG...3 2 REGISTER-ZUGRIFFE...4 2.1 Was sind überhaupt Register?... 4 2.2 Registerzugriff mit 8/ 16 oder 32 Bit-Datenbreite... 4 2.3 Registerbelegung...
WICHTIGER HINWEIS FÜR HÄNDLER UND SERVICE-WERKSTÄTTEN:
 Sehr geehrter Kunde, ruwido erweitert seine Serviceleistungen für den Sektor seiner Symphony Ersatzfernbedienungen sowie der bisher für ASWO/ESPO hergestellten COM genius Ersatzfernbedienungen mit einem
Sehr geehrter Kunde, ruwido erweitert seine Serviceleistungen für den Sektor seiner Symphony Ersatzfernbedienungen sowie der bisher für ASWO/ESPO hergestellten COM genius Ersatzfernbedienungen mit einem
Datenaufbereitung in SPSS. Daten zusammenfügen
 Daten zusammenfügen I. Fälle hinzufügen Diese Schritte müssen Sie unternehmen, wenn die Daten in unterschiedlichen Dateien sind; wenn also die Daten von unterschiedlichen Personen in unterschiedlichen
Daten zusammenfügen I. Fälle hinzufügen Diese Schritte müssen Sie unternehmen, wenn die Daten in unterschiedlichen Dateien sind; wenn also die Daten von unterschiedlichen Personen in unterschiedlichen
MC-Hx 006. Einbindung des MC-Hx Modul als MODBus TCP Slave. MB DataTec GmbH. Stand: 01.2013
 Einbindung des MC-Hx Modul als MODBus TCP Slave MB DataTec GmbH Stand: 01.2013 Kontakt: MB DataTec GmbH Friedrich Ebert Str. 217a 58666 Kierspe Tel.: 02359 2973-22, Fax 23 Web : www.mb-datatec.de e-mail:
Einbindung des MC-Hx Modul als MODBus TCP Slave MB DataTec GmbH Stand: 01.2013 Kontakt: MB DataTec GmbH Friedrich Ebert Str. 217a 58666 Kierspe Tel.: 02359 2973-22, Fax 23 Web : www.mb-datatec.de e-mail:
Version 1.0.00. White Paper ZS-TimeCalculation und die Zusammenarbeit mit dem iphone, ipad bzw. ipod Touch
 White Paper ZS-TimeCalculation und die Zusammenarbeit mit dem iphone, ipad bzw. ipod Touch Seite 1/8 Z-Systems 2004-2011 Einführung Das iphone bzw. der ipod Touch wird von ZS-TimeCalculation mit Hilfe
White Paper ZS-TimeCalculation und die Zusammenarbeit mit dem iphone, ipad bzw. ipod Touch Seite 1/8 Z-Systems 2004-2011 Einführung Das iphone bzw. der ipod Touch wird von ZS-TimeCalculation mit Hilfe
SCU Safety Control Unit
 Grundidee Die Trennung von sicherheitsrelevanten und nicht sicherheitsrelevanten Funktionen und Architekturelementen ist einer der Grundgedanken aller Sicherheitsnormen. Komplexe Systeme sind undurchsichtig,
Grundidee Die Trennung von sicherheitsrelevanten und nicht sicherheitsrelevanten Funktionen und Architekturelementen ist einer der Grundgedanken aller Sicherheitsnormen. Komplexe Systeme sind undurchsichtig,
Anleitung für DT-TPC Tel Modul
 Anleitung für DT-TPC Tel Modul Vorsichtsmaßnahmen/Fehler : Bitte schützen Sie Ihre Anlage vor Erschütterungen Bitte reinigen Sie alle Komponenten mit einen Bauwolltuch (keine Chemikalien) Es kann zu Bildverzerrungen
Anleitung für DT-TPC Tel Modul Vorsichtsmaßnahmen/Fehler : Bitte schützen Sie Ihre Anlage vor Erschütterungen Bitte reinigen Sie alle Komponenten mit einen Bauwolltuch (keine Chemikalien) Es kann zu Bildverzerrungen
PKV- Projektanlage Assistent
 Desk Software & Consulting GmbH PKV- Projektanlage Assistent Edith Freundt DESK Software und Consulting GmbH Im Heerfeld 2-4 35713 Eibelshausen Tel.: +49 (0) 2774/924 98-0 Fax: +49 (0) 2774/924 98-15 info@desk-firm.de
Desk Software & Consulting GmbH PKV- Projektanlage Assistent Edith Freundt DESK Software und Consulting GmbH Im Heerfeld 2-4 35713 Eibelshausen Tel.: +49 (0) 2774/924 98-0 Fax: +49 (0) 2774/924 98-15 info@desk-firm.de
STORES2. Operation Manual Version 1.23.7. Warenretoure mit Zustimmung des Headquarter
 STORES2 Operation Manual Version 1.23.7 Pag 2 da 16 1. Überprüfen Sie, ob Sie noch übrige Colli Strichcodes haben, die Sie früher erstellt, aber noch nicht verwendet haben. 2. Ansonsten drucken Sie sich
STORES2 Operation Manual Version 1.23.7 Pag 2 da 16 1. Überprüfen Sie, ob Sie noch übrige Colli Strichcodes haben, die Sie früher erstellt, aber noch nicht verwendet haben. 2. Ansonsten drucken Sie sich
GOBio. Kontrolle mit Fingerabdrücken. 868 MHz Handsender mit biometrischer Aktivierung
 868 MHz Handsender mit biometrischer Aktivierung Elektronische Lösung für Türen und Tore, Schranken und automatische Steuerungselemente Kontrolle mit Fingerabdrücken Fahrzeughalter Programmierbarer Motion
868 MHz Handsender mit biometrischer Aktivierung Elektronische Lösung für Türen und Tore, Schranken und automatische Steuerungselemente Kontrolle mit Fingerabdrücken Fahrzeughalter Programmierbarer Motion
Windows 98 / Windows NT mit NCP WAN Miniport-Treiber 23. Oktober 1998
 Windows 98 / Windows NT mit NCP WAN Miniport-Treiber 23. Oktober 1998 XBMPD Windows 98 mit NCP WAN Miniport-Treiber 3 Benötigte Hard- und Software: 1. NCP ISDN ARROW Karte oder Box 2. Ihre CD-Rom mit dem
Windows 98 / Windows NT mit NCP WAN Miniport-Treiber 23. Oktober 1998 XBMPD Windows 98 mit NCP WAN Miniport-Treiber 3 Benötigte Hard- und Software: 1. NCP ISDN ARROW Karte oder Box 2. Ihre CD-Rom mit dem
FAQ 04/2015. Auswirkung der ISO 14119 auf 3SE53/3SF13 Positionsschalter. https://support.industry.siemens.com/cs/ww/de/view/109475921
 FAQ 04/2015 Auswirkung der ISO 14119 auf 3SE53/3SF13 Positionsschalter mit https://support.industry.siemens.com/cs/ww/de/view/109475921 Dieser Beitrag stammt aus dem Siemens Industry Online Support. Es
FAQ 04/2015 Auswirkung der ISO 14119 auf 3SE53/3SF13 Positionsschalter mit https://support.industry.siemens.com/cs/ww/de/view/109475921 Dieser Beitrag stammt aus dem Siemens Industry Online Support. Es
1 Einleitung. Lernziele. automatische Antworten bei Abwesenheit senden. Einstellungen für automatische Antworten Lerndauer. 4 Minuten.
 1 Einleitung Lernziele automatische Antworten bei Abwesenheit senden Einstellungen für automatische Antworten Lerndauer 4 Minuten Seite 1 von 18 2 Antworten bei Abwesenheit senden» Outlook kann während
1 Einleitung Lernziele automatische Antworten bei Abwesenheit senden Einstellungen für automatische Antworten Lerndauer 4 Minuten Seite 1 von 18 2 Antworten bei Abwesenheit senden» Outlook kann während
CAN-Datenbus von Bosch
 CAN-Datenbus von Bosch CAN = CONTROLLER AREA NETWORK Der CAN-Bus dient der seriellen Datenübertragung im Kraftfahrzeug. Er erfreut sich einer immer breiteren Anwendung und ist zwischenzeitlich auch im
CAN-Datenbus von Bosch CAN = CONTROLLER AREA NETWORK Der CAN-Bus dient der seriellen Datenübertragung im Kraftfahrzeug. Er erfreut sich einer immer breiteren Anwendung und ist zwischenzeitlich auch im