Vektorräume und Rang einer Matrix
|
|
|
- Susanne Melsbach
- vor 7 Jahren
- Abrufe
Transkript
1 Universität Basel Wirtschaftswissenschaftliches Zentrum Vektorräume und Rang einer Matrix Dr. Thomas Zehrt Inhalt:. Lineare Unabhängigkeit 2. Vektorräume und Basen 3. Basen von R n 4. Der Rang und Rangbestimmung 5. Reguläre und singuläre Matrizen 6. Determinante und reguläre Matrizen 7. Zusammenfassung

2 2 Teil Lineare Unabhängigkeit

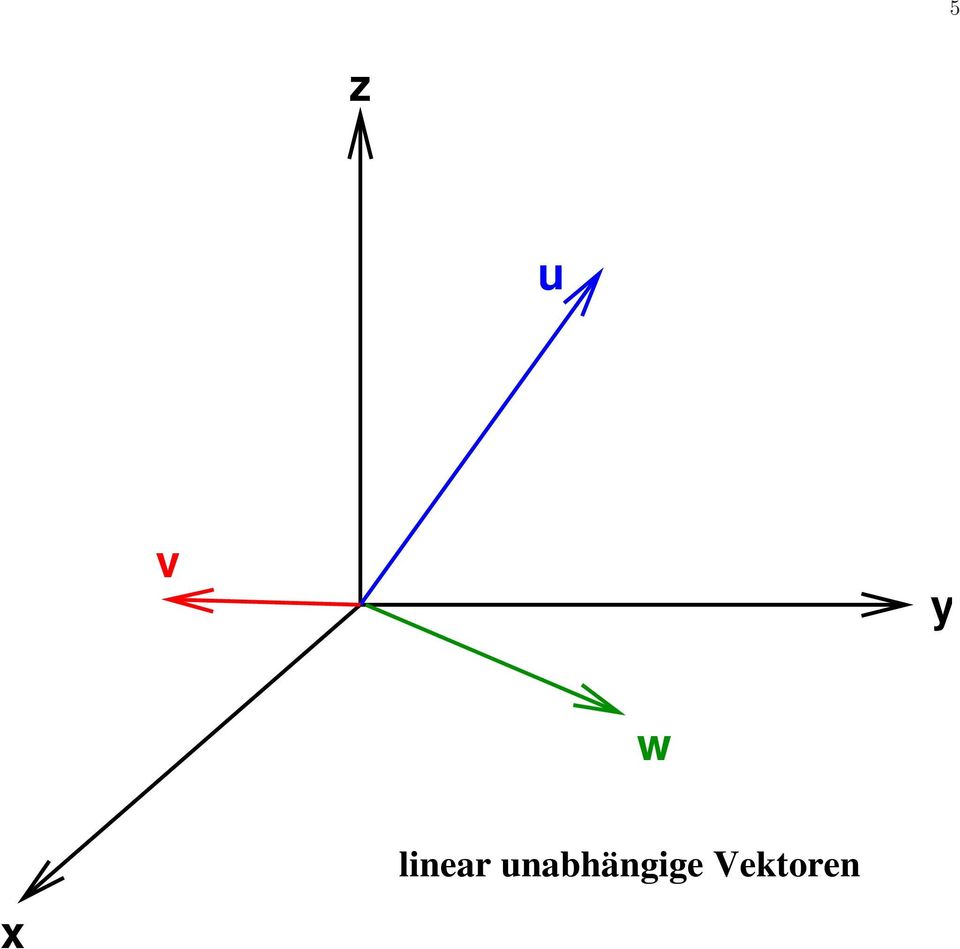
3 Die k Vektoren u,u 2,...,u k heissen linear abhängig, falls einer sich als Linearkombination der anderen darstellen lässt, d.h. falls es 3 einen Index i und reelle Zahlen a,...,a i,a i+...,a k gibt, so dass u i = a u +...+a i u i +a i+ u i a k u k Andernfalls heissen die Vektoren linear unabhängig.

4 4 z u v y w linear abhängige Vektoren x

5 5 z u v y w x linear unabhängige Vektoren
6 6 Äquivalente Definition Die k Vektoren u,u 2,...,u k heissen linear abhängig, falls es reelle Zahlen b,b 2,...,b k gibt, so dass b u + b 2 u b k u k = und nicht alle b j =. Die Vektoren heissen linear unabhängig, falls aus einer Darstellung des -Vektors b u + b 2 u b k u k = stets b = b 2 =... = b k = folgt.

7 Aufgabe Es seien die folgenden Vektoren gegeben: u =, u 2 = und u 3 =. Zeigen Sie, dass. u linear abhängig ist. 2. u 2 linear unabhängig ist. 3. u und u 2 linear abhängig sind. 4. u 2 und u 3 linear unabhängig sind. 7

8 8 Geometrische Interpretation Vektoren im R 2 2 Vektoren sind linear abhängig einer ist ein Vielfaches des anderen sie liegen auf der gleichen Gerade durch den Nullpunkt 3 oder mehr Vektoren sind stets linear abhängig

9 Vektoren im R Vektoren sind linear abhängig einer ist ein Vielfaches des anderen sie liegen auf der gleichen Gerade durch den Nullpunkt 3 Vektoren sind sind linear abhängig sie liegen auf der gleichen Ebene durch den Nullpunkt 4 oder mehr Vektoren sind stets linear abhängig

10 Teil 2 Vektorräume und Basen
11 gegeben: n linear unabhängige Vektoren u,u 2,...,u n Die Menge aller möglichen Linearkombinationen dieser Vektoren wird n-dimensionaler Vektorraum V genannt. Die Vektoren u,u 2,...,u n werden auch als Basis von V bezeichnet. Bemerkungen: u,u 2,...,u n spannen V auf Eine Basis spannt mit möglichst wenigen Vektoren (deshalb fordern wir lineare Unabhängigkeit) den Vektorraum V auf.

12 2 Teil 3 Basen von R n

13 3 R 3 Die Vektoren e =, e 2 =, e 3 = bilden eine Basis von R 3. Jeder Vektor lässt sich als Linearkombination dieser drei (linear unabhängigen?) Vektoren schreiben: x y z = x + y + z

14 4 Die Vektoren, 2, 2 3 bilden eine Basis von R 3. Jeder Vektor lässt sich als Linearkombination dieser drei (linear unabhängigen) Vektoren schreiben: x y z = 3 (x + 4y + 2z) + 2 ( 2x + y z) 3 2 (x + y + 2z) 3 3
 + 2 ( 2x + y z) 3 2 (x + y + 2z) 3")
15 R n 5 Die Vektoren e =., e 2 =.,...,e n =. bilden eine so genannte orthonormierte Basis von R n : alle Vektoren sind paarweise orthogonal ( i j : e i e j ) und alle Vektoren haben die Länge ( i : e i = ).
 und alle Vektoren haben die Länge ( i")
16 6 Teil 4 Der Rang und Rangbestimmung
17 Eine (m n)-matrix besteht aus 7 n Spaltenvektoren a,a 2,...,a n und m Zeilenvektoren b,b 2,...,b m. A = a a 2... a n a 2. a a 2n a ij..... a m a m2... a mn = b b 2. b m = (a,a 2,...,a n ) Merkwürdigerweise gilt: maximale Anzahl linear unabhängiger Spaltenvektoren = maximale Anzahl linear unabhängiger Zeilenvektoren
 Merkwürdigerweise gilt: maximale Anzahl linear unabhängiger")
18 8 Die maximale Anzahl linear unabhängiger Zeilenvektoren (oder Spaltenvektoren) einer Matrix A heisst der Rang der Matrix. Bezeichnung: rg(a) oder Rg(A) Beispiele: A = rg(a) = 3 B = rg(b) = 2 C = rg(c) = 3
 oder Rg(A) Beispiele: A = 2 3 4 2")
19 Rangbestimmung 9 Die folgenden Zeilenumformungen, die als elementare Zeilenumformungen bezeichnet werden, (analog: Spaltenumformungen) ändern den Rang einer Matrix nicht: Vertauschen von Zeilen Multiplikation einer Zeile mit einer Zahl Addition eines Vielfachen einer Zeile zu einer anderen Zeile Mittels dieser Umformungen kann man jede Matrix auf Zeilenstufenform bringen. Der Rang ist die Anzahl der Stufen.

20 2 Beispiel: Der Rang der Matrix ist 3 (drei Stufen).

21 Teil 5 Reguläre und singuläre Matrizen 2
22 22 Eine quadratische Matrix A = A n n heisst regulär, falls rg(a) = n singulär, falls rg(a) < n Beispiele: A = ( 2 ) rg(a) = 2, A regulär B = rg(b) = 2 < 3, B singulär C = rg(c) = 3 < 4, C singulär
23 Satz: Die Inverse A einer quadratischen Matrix A existiert genau dann, wenn A regulär ist. Beweis für n = 3: 23 A = a a 2 a 3 a 2 a 22 a 23 a 3 a 32 a 33 = (a,a 2,a 3 ) mit den Spaltenvektoren a,a 2,a 3 von A. Ansatz für die Inverse: A = x y z x 2 y 2 z 2 x 3 y 3 z 3
24 24 Die Bedingung AA = I kann nun spaltenweise aufgeschrieben werden. AA = (a,a 2,a 3 ) x y z x 2 y 2 z 2 x 3 y 3 z 3 = x a + x 2 a 2 + x 3 a 3 = y a + y 2 a 2 + y 3 a 3 = = e = e 2 z a + z 2 a 2 + z 3 a 3 = = e 3
25 Falls A regulär a,a 2,a 3 sind linear unabhängig es gibt eine eindeutige Darstellung der Vektoren e,e 2,e 3 als Linearkombination der a,a 2,a 3 die 9 Einträge x,x 2,...,z 3 der Matrix A sind eindeutig bestimmt A invertierbar 25 Falls A singulär a,a 2,a 3 sind linear abhängig, liegen also in einer Ebene durch den Nullpunkt mindestens einer der Vektoren e,e 2,e 3 kann nicht als Linearkombination der a,a 2,a 3 geschrieben werden A nicht invertierbar
26 26 Teil 6 Determinante und reguläre Matrizen
27 A = A n n regulär die Spaltenvektoren sind linear unabhängig, spannen also den ganzen Raum R n auf der von den Spaltenvektoren aufgespannte Parallelepiped hat n-dimesionales Volumen det(a) 27 Satz: A n n regulär det(a) A n n singulär det(a) =
28 28 Aufgabe 2 Führen Sie den Gedankengang von der letzten Seite( für die ) beiden Matrizen ( ) 2 2 A = bzw. B = aus. 2 4 Skizzieren Sie die jeweiligen Spaltenvektoren und versuchen Sie die Flächeninhalte der Parallelogramme direkt auszurechnen.
29 Teil 7 Zusammenfassung 29
30 3. n+ oder mehr Vektoren im n-dimensionalen Vektorraum R n sind stets linear abhängig. 2. Jede Basis des R n besteht aus genau n Vektoren. 3. n linear unabhängige Vektoren im R n bilden eine Basis des R n. 4. Sind u,u 2,...,u n eine Basis des Vektorraums V, so ist für jedes x V die Darstellung x = a u + a 2 u a n u n eindeutig.
31 3 A n n regulär rg(a) = n A existiert det(a) Spaltenvektoren bilden eine Basis des R n Zeilenvektoren bilden eine Basis des R n A n n singulär rg(a) < n A existiert nicht det(a) = Spaltenvektoren sind linear abhängig Zeilenvektoren sind linear abhängig
1 Lineare Unabhängigkeit Äquivalente Definition Geometrische Interpretation Vektorräume und Basen 6
 Wirtschaftswissenschaftliches Zentrum Universität Basel Mathematik Dr. Thomas Zehrt Vektorräume und Rang einer Matrix Inhaltsverzeichnis Lineare Unabhängigkeit. Äquivalente Definition.............................
Wirtschaftswissenschaftliches Zentrum Universität Basel Mathematik Dr. Thomas Zehrt Vektorräume und Rang einer Matrix Inhaltsverzeichnis Lineare Unabhängigkeit. Äquivalente Definition.............................
Vektoren und Matrizen
 Universität Basel Wirtschaftswissenschaftliches Zentrum Vektoren und Matrizen Dr. Thomas Zehrt Inhalt: 1. Vektoren (a) Einführung (b) Linearkombinationen (c) Länge eines Vektors (d) Skalarprodukt (e) Geraden
Universität Basel Wirtschaftswissenschaftliches Zentrum Vektoren und Matrizen Dr. Thomas Zehrt Inhalt: 1. Vektoren (a) Einführung (b) Linearkombinationen (c) Länge eines Vektors (d) Skalarprodukt (e) Geraden
10.2 Linearkombinationen
 147 Vektorräume in R 3 Die Vektorräume in R 3 sind { } Geraden durch den Ursprung Ebenen durch den Ursprung R 3 Analog zu reellen Vektorräumen kann man komplexe Vektorräume definieren. In der Definition
147 Vektorräume in R 3 Die Vektorräume in R 3 sind { } Geraden durch den Ursprung Ebenen durch den Ursprung R 3 Analog zu reellen Vektorräumen kann man komplexe Vektorräume definieren. In der Definition
, v 3 = und v 4 =, v 2 = V 1 = { c v 1 c R }.
 154 e Gegeben sind die Vektoren v 1 = ( 10 1, v = ( 10 1. Sei V 1 = v 1 der von v 1 aufgespannte Vektorraum in R 3. 1 Dann besteht V 1 aus allen Vielfachen von v 1, V 1 = { c v 1 c R }. ( 0 ( 01, v 3 =
154 e Gegeben sind die Vektoren v 1 = ( 10 1, v = ( 10 1. Sei V 1 = v 1 der von v 1 aufgespannte Vektorraum in R 3. 1 Dann besteht V 1 aus allen Vielfachen von v 1, V 1 = { c v 1 c R }. ( 0 ( 01, v 3 =
36 2 Lineare Algebra
 6 Lineare Algebra Quadratische Matrizen a a n sei jetzt n m, A, a ij R, i, j,, n a n a nn Definition Eine quadratische Matrix A heißt invertierbar genau dann, wenn es eine quadratische Matrix B gibt, so
6 Lineare Algebra Quadratische Matrizen a a n sei jetzt n m, A, a ij R, i, j,, n a n a nn Definition Eine quadratische Matrix A heißt invertierbar genau dann, wenn es eine quadratische Matrix B gibt, so
05. Lineare Gleichungssysteme
 05 Lineare Gleichungssysteme Wir betrachten ein System von m Gleichungen in n Unbestimmten (Unbekannten) x 1,, x n von der Form a 11 x 1 + a 12 x 2 + a 13 x 3 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + a
05 Lineare Gleichungssysteme Wir betrachten ein System von m Gleichungen in n Unbestimmten (Unbekannten) x 1,, x n von der Form a 11 x 1 + a 12 x 2 + a 13 x 3 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + a
Kapitel 4. Determinante. Josef Leydold Mathematik für VW WS 2017/18 4 Determinante 1 / 24
 Kapitel 4 Determinante Josef Leydold Mathematik für VW WS 2017/18 4 Determinante 1 / 24 Was ist eine Determinante? Wir wollen messen, ob n Vektoren im R n linear abhängig sind bzw. wie weit sie davon entfernt
Kapitel 4 Determinante Josef Leydold Mathematik für VW WS 2017/18 4 Determinante 1 / 24 Was ist eine Determinante? Wir wollen messen, ob n Vektoren im R n linear abhängig sind bzw. wie weit sie davon entfernt
1 Einführung Gleichungen und 2 Unbekannte Gleichungen und 3 Unbekannte... 4
 Wirtschaftswissenschaftliches Zentrum 3 Universität Basel Mathematik 2 Dr Thomas Zehrt Lineare Gleichungssysteme Inhaltsverzeichnis Einführung 2 2 Gleichungen und 2 Unbekannte 2 2 3 Gleichungen und 3 Unbekannte
Wirtschaftswissenschaftliches Zentrum 3 Universität Basel Mathematik 2 Dr Thomas Zehrt Lineare Gleichungssysteme Inhaltsverzeichnis Einführung 2 2 Gleichungen und 2 Unbekannte 2 2 3 Gleichungen und 3 Unbekannte
9.2 Invertierbare Matrizen
 34 9.2 Invertierbare Matrizen Die Division ist als Umkehroperation der Multiplikation definiert. Das heisst, für reelle Zahlen a 0 und b gilt b = a genau dann, wenn a b =. Übertragen wir dies von den reellen
34 9.2 Invertierbare Matrizen Die Division ist als Umkehroperation der Multiplikation definiert. Das heisst, für reelle Zahlen a 0 und b gilt b = a genau dann, wenn a b =. Übertragen wir dies von den reellen
8.2 Invertierbare Matrizen
 38 8.2 Invertierbare Matrizen Die Division ist als Umkehroperation der Multiplikation definiert. Das heisst, für reelle Zahlen a 0 und b gilt b = a genau dann, wenn a b =. Übertragen wir dies von den reellen
38 8.2 Invertierbare Matrizen Die Division ist als Umkehroperation der Multiplikation definiert. Das heisst, für reelle Zahlen a 0 und b gilt b = a genau dann, wenn a b =. Übertragen wir dies von den reellen
Geometrische Deutung linearer Abbildungen
 Geometrische Deutung linearer Abbildungen Betrachten f : R n R n, f(x) = Ax. Projektionen z.b. A = 1 0 0 0 1 0 0 0 0 die senkrechte Projektion auf die xy-ebene in R 3. Projektionen sind weder injektiv
Geometrische Deutung linearer Abbildungen Betrachten f : R n R n, f(x) = Ax. Projektionen z.b. A = 1 0 0 0 1 0 0 0 0 die senkrechte Projektion auf die xy-ebene in R 3. Projektionen sind weder injektiv
8.2 Invertierbare Matrizen
 38 8.2 Invertierbare Matrizen Die Division ist als Umkehroperation der Multiplikation definiert. Das heisst, für reelle Zahlen a 0 und b gilt b = a genau dann, wenn a b =. Übertragen wir dies von den reellen
38 8.2 Invertierbare Matrizen Die Division ist als Umkehroperation der Multiplikation definiert. Das heisst, für reelle Zahlen a 0 und b gilt b = a genau dann, wenn a b =. Übertragen wir dies von den reellen
Rang einer Matrix. 1-E1 Ma 1 Lubov Vassilevskaya
 Rang einer Matrix 1-E1 Ma 1 Lubov Vassilevskaya Unterdeterminante einer nichtquadratischen Matrix M ist eine nichtquadratische 2,3-Matrix: M = 6 2 3 0 5 7 Durch Streichen einer der drei Spalten kann man
Rang einer Matrix 1-E1 Ma 1 Lubov Vassilevskaya Unterdeterminante einer nichtquadratischen Matrix M ist eine nichtquadratische 2,3-Matrix: M = 6 2 3 0 5 7 Durch Streichen einer der drei Spalten kann man
Serie 10: Inverse Matrix und Determinante
 D-ERDW, D-HEST, D-USYS Mathematik I HS 5 Dr Ana Cannas Serie 0: Inverse Matrix und Determinante Bemerkung: Die Aufgaben dieser Serie bilden den Fokus der Übungsgruppen vom und 5 November Gegeben sind die
D-ERDW, D-HEST, D-USYS Mathematik I HS 5 Dr Ana Cannas Serie 0: Inverse Matrix und Determinante Bemerkung: Die Aufgaben dieser Serie bilden den Fokus der Übungsgruppen vom und 5 November Gegeben sind die
Vortrag 20: Kurze Vektoren in Gittern
 Seminar: Wie genau ist ungefähr Vortrag 20: Kurze Vektoren in Gittern Kerstin Bauer Sommerakademie Görlitz, 2007 Definition und Problembeschreibung Definition: Gitter Seien b 1,,b k Q n. Dann heißt die
Seminar: Wie genau ist ungefähr Vortrag 20: Kurze Vektoren in Gittern Kerstin Bauer Sommerakademie Görlitz, 2007 Definition und Problembeschreibung Definition: Gitter Seien b 1,,b k Q n. Dann heißt die
Mathematik II Frühlingsemester 2015 Kapitel 8: Lineare Algebra 8.3 Ergänzungen
 Mathematik II Frühlingsemester 2015 Kapitel 8: Lineare Algebra 83 Ergänzungen wwwmathethzch/education/bachelor/lectures/fs2015/other/mathematik2 biol Prof Dr Erich Walter Farkas http://wwwmathethzch/ farkas
Mathematik II Frühlingsemester 2015 Kapitel 8: Lineare Algebra 83 Ergänzungen wwwmathethzch/education/bachelor/lectures/fs2015/other/mathematik2 biol Prof Dr Erich Walter Farkas http://wwwmathethzch/ farkas
Mathematik II Frühjahrssemester 2013
 Mathematik II Frühjahrssemester 2013 Prof Dr Erich Walter Farkas Kapitel 7: Lineare Algebra 73 Ergänzungen Prof Dr Erich Walter Farkas Mathematik I+II, 73 Ergänzungen 1 / 17 1 Reguläre Matrizen Prof Dr
Mathematik II Frühjahrssemester 2013 Prof Dr Erich Walter Farkas Kapitel 7: Lineare Algebra 73 Ergänzungen Prof Dr Erich Walter Farkas Mathematik I+II, 73 Ergänzungen 1 / 17 1 Reguläre Matrizen Prof Dr
LINEARE ALGEBRA II. FÜR PHYSIKER
 LINEARE ALGEBRA II FÜR PHYSIKER BÁLINT FARKAS 4 Rechnen mit Matrizen In diesem Kapitel werden wir zunächst die so genannten elementaren Umformungen studieren, die es ermöglichen eine Matrix auf besonders
LINEARE ALGEBRA II FÜR PHYSIKER BÁLINT FARKAS 4 Rechnen mit Matrizen In diesem Kapitel werden wir zunächst die so genannten elementaren Umformungen studieren, die es ermöglichen eine Matrix auf besonders
1 Lineare Algebra. 1.1 Matrizen und Vektoren. Slide 3. Matrizen. Eine Matrix ist ein rechteckiges Zahlenschema
 1 Lineare Algebra 1.1 Matrizen und Vektoren Slide 3 Matrizen Eine Matrix ist ein rechteckiges Zahlenschema eine n m-matrix A besteht aus n Zeilen und m Spalten mit den Matrixelementen a ij, i=1...n und
1 Lineare Algebra 1.1 Matrizen und Vektoren Slide 3 Matrizen Eine Matrix ist ein rechteckiges Zahlenschema eine n m-matrix A besteht aus n Zeilen und m Spalten mit den Matrixelementen a ij, i=1...n und
Kapitel 3 Lineare Algebra
 Kapitel 3 Lineare Algebra Inhaltsverzeichnis VEKTOREN... 3 VEKTORRÄUME... 3 LINEARE UNABHÄNGIGKEIT UND BASEN... 4 MATRIZEN... 6 RECHNEN MIT MATRIZEN... 6 INVERTIERBARE MATRIZEN... 6 RANG EINER MATRIX UND
Kapitel 3 Lineare Algebra Inhaltsverzeichnis VEKTOREN... 3 VEKTORRÄUME... 3 LINEARE UNABHÄNGIGKEIT UND BASEN... 4 MATRIZEN... 6 RECHNEN MIT MATRIZEN... 6 INVERTIERBARE MATRIZEN... 6 RANG EINER MATRIX UND
Aufgabe 1 (a) Vorgehen wie im Beispiel auf Seite 151 des Skripts. Für die Anzahl möglicher Linearkombinationen
 Vorgehen wie im Beispiel auf Seite 151 des Skripts. Für die Anzahl möglicher Linearkombinationen") Mathe I für Naturwissenschaften Dr. Christine Zehrt 14.12.17 Hinweise und Ergebnisse zur Übung 13 Uni Basel Lösungshinweise Aufgabe 1 (a Vorgehen wie im Beispiel auf Seite 151 des Skripts. Für die Anzahl
Mathe I für Naturwissenschaften Dr. Christine Zehrt 14.12.17 Hinweise und Ergebnisse zur Übung 13 Uni Basel Lösungshinweise Aufgabe 1 (a Vorgehen wie im Beispiel auf Seite 151 des Skripts. Für die Anzahl
37 Gauß-Algorithmus und lineare Gleichungssysteme
 37 Gauß-Algorithmus und lineare Gleichungssysteme 37 Motivation Lineare Gleichungssysteme treten in einer Vielzahl von Anwendungen auf und müssen gelöst werden In Abschnitt 355 haben wir gesehen, dass
37 Gauß-Algorithmus und lineare Gleichungssysteme 37 Motivation Lineare Gleichungssysteme treten in einer Vielzahl von Anwendungen auf und müssen gelöst werden In Abschnitt 355 haben wir gesehen, dass
32 2 Lineare Algebra
 3 Lineare Algebra Definition i Die Vektoren a,, a k R n, k N, heißen linear unabhängig genau dann, wenn für alle λ,, λ k R aus der Eigenschaft λ i a i λ a + + λ k a k folgt λ λ k Anderenfalls heißen die
3 Lineare Algebra Definition i Die Vektoren a,, a k R n, k N, heißen linear unabhängig genau dann, wenn für alle λ,, λ k R aus der Eigenschaft λ i a i λ a + + λ k a k folgt λ λ k Anderenfalls heißen die
(Allgemeine) Vektorräume (Teschl/Teschl 9)
 Vektorräume (Teschl/Teschl 9)") (Allgemeine) Vektorräume (Teschl/Teschl 9) Sei K ein beliebiger Körper. Ein Vektorraum über K ist eine (nichtleere) Menge V, auf der zwei Operationen deniert sind, die bestimmten Rechenregeln genügen:
(Allgemeine) Vektorräume (Teschl/Teschl 9) Sei K ein beliebiger Körper. Ein Vektorraum über K ist eine (nichtleere) Menge V, auf der zwei Operationen deniert sind, die bestimmten Rechenregeln genügen:
Matrizen, Determinanten, lineare Gleichungssysteme
 Matrizen, Determinanten, lineare Gleichungssysteme 1 Matrizen Definition 1. Eine Matrix A vom Typ m n (oder eine m n Matrix, A R m n oder A C m n ) ist ein rechteckiges Zahlenschema mit m Zeilen und n
Matrizen, Determinanten, lineare Gleichungssysteme 1 Matrizen Definition 1. Eine Matrix A vom Typ m n (oder eine m n Matrix, A R m n oder A C m n ) ist ein rechteckiges Zahlenschema mit m Zeilen und n
eine vom Nullvektor verschiedene Lösung hat. r heisst in diesem Fall Eigenvektor der Matrix A zum Eigenwert λ.
 Eigenwert, Eigenvektor In der Regel hat bei einer linearen Abbildung das Bild eines Vektors eine andere Richtung als das Original r. Bei der Untersuchung der geometrischen Eigenschaften von linearen Abbildungen
Eigenwert, Eigenvektor In der Regel hat bei einer linearen Abbildung das Bild eines Vektors eine andere Richtung als das Original r. Bei der Untersuchung der geometrischen Eigenschaften von linearen Abbildungen
(Allgemeine) Vektorräume (Teschl/Teschl 9)
 Vektorräume (Teschl/Teschl 9)") (Allgemeine Vektorräume (Teschl/Teschl 9 Sei K ein beliebiger Körper. Ein Vektorraum über K ist eine (nichtleere Menge V, auf der zwei Operationen deniert sind, die bestimmten Rechenregeln genügen: Eine
(Allgemeine Vektorräume (Teschl/Teschl 9 Sei K ein beliebiger Körper. Ein Vektorraum über K ist eine (nichtleere Menge V, auf der zwei Operationen deniert sind, die bestimmten Rechenregeln genügen: Eine
Aufgabe 4 Bestimmen Sie je eine Basis des Zeilen- und des Spaltenraums der Matrix
 Mathematik I für Naturwissenschaften Dr. Christine Zehrt 3..8 Übung 3 (für alle Uni Basel Besprechung der Lösungen: 7./8 Dezember 8 in den Übungsstunden Die Geo-Übungsstunde von Gioia findet am 7. Dezember
Mathematik I für Naturwissenschaften Dr. Christine Zehrt 3..8 Übung 3 (für alle Uni Basel Besprechung der Lösungen: 7./8 Dezember 8 in den Übungsstunden Die Geo-Übungsstunde von Gioia findet am 7. Dezember
BC 1.2 Mathematik WS 2016/17. BC 1.2 Mathematik Zusammenfassung Kapitel II: Vektoralgebra und lineare Algebra. b 2
 Zusammenfassung Kapitel II: Vektoralgebra und lineare Algebra 1 Vektoralgebra 1 Der dreidimensionale Vektorraum R 3 ist die Gesamtheit aller geordneten Tripel (x 1, x 2, x 3 ) reeller Zahlen Jedes geordnete
Zusammenfassung Kapitel II: Vektoralgebra und lineare Algebra 1 Vektoralgebra 1 Der dreidimensionale Vektorraum R 3 ist die Gesamtheit aller geordneten Tripel (x 1, x 2, x 3 ) reeller Zahlen Jedes geordnete
Übungen zum Ferienkurs Lineare Algebra 2015/2016: Lösungen
 1 Lineare Abhängigkeit 1.1 Für welche t sind die folgenden Vektoren aus 3 linear abhängig? (1, 3, 4), (3, t, 11), ( 1, 4, 0). Das zur Aufgabe gehörige LGS führt auf die Matrix 1 3 4 3 t 11. 1 4 0 Diese
1 Lineare Abhängigkeit 1.1 Für welche t sind die folgenden Vektoren aus 3 linear abhängig? (1, 3, 4), (3, t, 11), ( 1, 4, 0). Das zur Aufgabe gehörige LGS führt auf die Matrix 1 3 4 3 t 11. 1 4 0 Diese
Lineare Gleichungssysteme
 Lineare Gleichungssysteme 1 Wiederholung Eine Menge von Vektoren a 1, a 2,, a k heisst linear unabhängig, wenn eine Linearkombination c 1 a 1 + c 2 a 2 + + c k a k = k c i a i (1) i=1 nur dann Null sein
Lineare Gleichungssysteme 1 Wiederholung Eine Menge von Vektoren a 1, a 2,, a k heisst linear unabhängig, wenn eine Linearkombination c 1 a 1 + c 2 a 2 + + c k a k = k c i a i (1) i=1 nur dann Null sein
Technische Universität München Zentrum Mathematik. Übungsblatt 7
 Technische Universität München Zentrum Mathematik Mathematik (Elektrotechnik) Prof. Dr. Anusch Taraz Dr. Michael Ritter Übungsblatt 7 Hausaufgaben Aufgabe 7. Für n N ist die Matrix-Exponentialfunktion
Technische Universität München Zentrum Mathematik Mathematik (Elektrotechnik) Prof. Dr. Anusch Taraz Dr. Michael Ritter Übungsblatt 7 Hausaufgaben Aufgabe 7. Für n N ist die Matrix-Exponentialfunktion
In diesem Abschnitt betrachten wir nur quadratische Matrizen mit Komponenten aus einem Körper K, also A K n n für ein n N. Wenn (mit einem n > 1)
") 34 Determinanten In diesem Abschnitt betrachten wir nur quadratische Matrizen mit Komponenten aus einem Körper K, also A K n n für ein n N Wenn (mit einem n > 1) a 11 a 12 a 1n a 21 a 22 a 2n A =, (1)
34 Determinanten In diesem Abschnitt betrachten wir nur quadratische Matrizen mit Komponenten aus einem Körper K, also A K n n für ein n N Wenn (mit einem n > 1) a 11 a 12 a 1n a 21 a 22 a 2n A =, (1)
Tutorium: Analysis und Lineare Algebra
 Tutorium: Analysis und Lineare Algebra Vorbereitung der Bonusklausur am 14.5.218 (Teil 2) 9. Mai 218 Steven Köhler mathe@stevenkoehler.de mathe.stevenkoehler.de 2 c 218 Steven Köhler 9. Mai 218 3 c 218
Tutorium: Analysis und Lineare Algebra Vorbereitung der Bonusklausur am 14.5.218 (Teil 2) 9. Mai 218 Steven Köhler mathe@stevenkoehler.de mathe.stevenkoehler.de 2 c 218 Steven Köhler 9. Mai 218 3 c 218
Kapitel 3. Vektorräume. Josef Leydold Mathematik für VW WS 2017/18 3 Vektorräume 1 / 41. : x i R, 1 i n x n
 Kapitel Vektorräume Josef Leydold Mathematik für VW WS 07/8 Vektorräume / 4 Reeller Vektorraum Die Menge aller Vektoren x mit n Komponenten bezeichnen wir mit x R n =. : x i R, i n x n und wird als n-dimensionaler
Kapitel Vektorräume Josef Leydold Mathematik für VW WS 07/8 Vektorräume / 4 Reeller Vektorraum Die Menge aller Vektoren x mit n Komponenten bezeichnen wir mit x R n =. : x i R, i n x n und wird als n-dimensionaler
Kapitel 3. Vektorräume. Josef Leydold Mathematik für VW WS 2017/18 3 Vektorräume 1 / 41
 Kapitel 3 Vektorräume Josef Leydold Mathematik für VW WS 2017/18 3 Vektorräume 1 / 41 Reeller Vektorraum Die Menge aller Vektoren x mit n Komponenten bezeichnen wir mit R n = x 1. x n : x i R, 1 i n und
Kapitel 3 Vektorräume Josef Leydold Mathematik für VW WS 2017/18 3 Vektorräume 1 / 41 Reeller Vektorraum Die Menge aller Vektoren x mit n Komponenten bezeichnen wir mit R n = x 1. x n : x i R, 1 i n und
3 Invertierbare Matrizen Die Inverse einer (2 2)-Matrix Eigenschaften invertierbarer Matrizen... 18
-Matrix Eigenschaften invertierbarer Matrizen... 18") Wirtschaftswissenschaftliches Zentrum Universität Basel Mathematik 2 Dr. Thomas Zehrt Vektoren und Matrizen Inhaltsverzeichnis Vektoren(Wiederholung bzw. Selbststudium 2. Linearkombinationen..............................
Wirtschaftswissenschaftliches Zentrum Universität Basel Mathematik 2 Dr. Thomas Zehrt Vektoren und Matrizen Inhaltsverzeichnis Vektoren(Wiederholung bzw. Selbststudium 2. Linearkombinationen..............................
Inhalt. Mathematik für Chemiker II Lineare Algebra. Vorlesung im Sommersemester Kurt Frischmuth. Rostock, April Juli 2015
 Inhalt Mathematik für Chemiker II Lineare Algebra Vorlesung im Sommersemester 5 Rostock, April Juli 5 Vektoren und Matrizen Abbildungen 3 Gleichungssysteme 4 Eigenwerte 5 Funktionen mehrerer Variabler
Inhalt Mathematik für Chemiker II Lineare Algebra Vorlesung im Sommersemester 5 Rostock, April Juli 5 Vektoren und Matrizen Abbildungen 3 Gleichungssysteme 4 Eigenwerte 5 Funktionen mehrerer Variabler
Determinanten. I. Permutationen
 Determinanten Durch Bildung der Determinante wird einer quadratischen (! Matrix eine gewisse Zahl zuordnet. Die Determinante tritt besonders bei Fragen der Flächen- bzw. Volumsberechnung auf (siehe auch
Determinanten Durch Bildung der Determinante wird einer quadratischen (! Matrix eine gewisse Zahl zuordnet. Die Determinante tritt besonders bei Fragen der Flächen- bzw. Volumsberechnung auf (siehe auch
Lineare Abbildungen. Es seien V und W Vektorräume über einem Körper K. Eine Abbildung f : V W heißt linear oder Homomorphismus, falls. d.h.
 Lineare Abbildungen Es seien V und W Vektorräume über einem Körper K. Eine Abbildung f : V W heißt linear oder Homomorphismus, falls (1) u, v V : f( u + v) = f( u) + f( v). (2) v V α K : f(α v) = αf( v).
Lineare Abbildungen Es seien V und W Vektorräume über einem Körper K. Eine Abbildung f : V W heißt linear oder Homomorphismus, falls (1) u, v V : f( u + v) = f( u) + f( v). (2) v V α K : f(α v) = αf( v).
3 Matrizenrechnung. 3. November
 3. November 008 4 3 Matrizenrechnung 3.1 Transponierter Vektor: Die Notation x R n bezieht sich per Definition 1 immer auf einen stehenden Vektor, x 1 x x =.. x n Der transponierte Vektor x T ist das zugehörige
3. November 008 4 3 Matrizenrechnung 3.1 Transponierter Vektor: Die Notation x R n bezieht sich per Definition 1 immer auf einen stehenden Vektor, x 1 x x =.. x n Der transponierte Vektor x T ist das zugehörige
Besteht eine Matrix nur aus einer Spalte (Zeile), so spricht man auch von einem Spaltenvektor (Zeilenvektor)
, so spricht man auch von einem Spaltenvektor (Zeilenvektor)") Matrizenrechnung. Matrizen Matrizen sind bereits im Kapitel Lineare Gleichungssysteme aufgetreten. Unter einer (m n) -Matrix A verstehen wir ein rechteckiges Zahlenschema mit m Zeilen und n Spalten. Der.
Matrizenrechnung. Matrizen Matrizen sind bereits im Kapitel Lineare Gleichungssysteme aufgetreten. Unter einer (m n) -Matrix A verstehen wir ein rechteckiges Zahlenschema mit m Zeilen und n Spalten. Der.
Determinanten. I. Permutationen
 Determinanten Durch Bildung der Determinante wird einer quadratischen (! Matrix eine gewisse Zahl zuordnet. Die Determinante tritt besonders bei Fragen der Flächen- bzw. Volumsberechnung auf (siehe auch
Determinanten Durch Bildung der Determinante wird einer quadratischen (! Matrix eine gewisse Zahl zuordnet. Die Determinante tritt besonders bei Fragen der Flächen- bzw. Volumsberechnung auf (siehe auch
Matrizen - I. Sei K ein Körper. Ein rechteckiges Schema A = wobei a ij K heißt Matrix bzw. eine m n Matrix (mit Elementen aus K).
.") Matrizen - I Definition. Sei K ein Körper. Ein rechteckiges Schema A = a 11 a 12...... a 1n a 21 a 22...... a 2n............ a m1 a m2...... a mn wobei j K heißt Matrix bzw. eine m n Matrix (mit Elementen
Matrizen - I Definition. Sei K ein Körper. Ein rechteckiges Schema A = a 11 a 12...... a 1n a 21 a 22...... a 2n............ a m1 a m2...... a mn wobei j K heißt Matrix bzw. eine m n Matrix (mit Elementen
Berechnung der Determinante
 Berechnung der Determinante Verhalten der Determinante unter elementaren Zeilenoperationen: Das Vertauschen zweier Zeilen/Spalten der Matrix A ändert nur das Vorzeichen der Determinante, d.h: i, j {1,...,
Berechnung der Determinante Verhalten der Determinante unter elementaren Zeilenoperationen: Das Vertauschen zweier Zeilen/Spalten der Matrix A ändert nur das Vorzeichen der Determinante, d.h: i, j {1,...,
Serie 8: Online-Test
 D-MAVT Lineare Algebra I HS 017 Prof Dr N Hungerbühler Serie 8: Online-Test Einsendeschluss: Freitag, der 4 November um 14:00 Uhr Diese Serie besteht nur aus Multiple-Choice-Aufgaben und wird nicht vorbesprochen
D-MAVT Lineare Algebra I HS 017 Prof Dr N Hungerbühler Serie 8: Online-Test Einsendeschluss: Freitag, der 4 November um 14:00 Uhr Diese Serie besteht nur aus Multiple-Choice-Aufgaben und wird nicht vorbesprochen
1 Bestimmung der inversen Matrix
 Inhaltsverzeichnis 1 Bestimmung der inversen Matrix Die inverse Matrix A 1 zu einer Matrix A kann nur bestimmt werden, wenn die Determinante der Matrix A von Null verschieden ist. Im folgenden wird die
Inhaltsverzeichnis 1 Bestimmung der inversen Matrix Die inverse Matrix A 1 zu einer Matrix A kann nur bestimmt werden, wenn die Determinante der Matrix A von Null verschieden ist. Im folgenden wird die
1 Zum Aufwärmen. 1.1 Notationen. 1.2 Lineare Abbildungen und Matrizen. 1.3 Darstellungsmatrizen
 1 Zum Aufwärmen 1.1 Notationen In diesem Teil der Vorlesung bezeichnen wir Körper mit K, Matrizen mit Buchstaben A,B,..., Vektoren mit u,v,w,... und Skalare mit λ,µ,... Die Menge der m n Matrizen bezeichnen
1 Zum Aufwärmen 1.1 Notationen In diesem Teil der Vorlesung bezeichnen wir Körper mit K, Matrizen mit Buchstaben A,B,..., Vektoren mit u,v,w,... und Skalare mit λ,µ,... Die Menge der m n Matrizen bezeichnen
1 Matrizenrechnung zweiter Teil
 MLAN1 1 Literatur: K. Nipp/D. Stoffer, Lineare Algebra, Eine Einführung für Ingenieure, VDF der ETHZ, 4. Auflage, 1998, oder neuer. 1 Matrizenrechnung zweiter Teil 1.1 Transponieren einer Matrix Wir betrachten
MLAN1 1 Literatur: K. Nipp/D. Stoffer, Lineare Algebra, Eine Einführung für Ingenieure, VDF der ETHZ, 4. Auflage, 1998, oder neuer. 1 Matrizenrechnung zweiter Teil 1.1 Transponieren einer Matrix Wir betrachten
5.7 Lineare Abhängigkeit, Basis und Dimension
 8 Kapitel 5. Lineare Algebra 5.7 Lineare Abhängigkeit, Basis und Dimension Seien v,...,v n Vektoren auseinemvektorraumv über einem KörperK. DieMenge aller Linearkombinationen von v,...,v n, nämlich { n
8 Kapitel 5. Lineare Algebra 5.7 Lineare Abhängigkeit, Basis und Dimension Seien v,...,v n Vektoren auseinemvektorraumv über einem KörperK. DieMenge aller Linearkombinationen von v,...,v n, nämlich { n
bzw. eine obere Dreiecksmatrix die Gestalt (U: upper)
") bzw. eine obere Dreiecksmatrix die Gestalt (U: upper) U = u 11 u 12 u 1n 1 u nn 0 u 22 u 2n 1 u 2n 0......... 0 0 u n 1n 1 u n 1n 0 0 0 u nn Eine nicht notwendig quadratische Matrix A = (a ij ) heißt obere
bzw. eine obere Dreiecksmatrix die Gestalt (U: upper) U = u 11 u 12 u 1n 1 u nn 0 u 22 u 2n 1 u 2n 0......... 0 0 u n 1n 1 u n 1n 0 0 0 u nn Eine nicht notwendig quadratische Matrix A = (a ij ) heißt obere
Kapitel I: Vektorrechnung 2: Vektoren im Raum
 WS 1/14 - Prof Dr Manfred Leitz 2 Vektoren im Raum A Grundbegriffe B Rechnen mit Vektoren C Der euklidische Betrag D Das euklidische Skalarprodukt E Vektorprodukt und Spatprodukt F Geraden und Ebenen im
WS 1/14 - Prof Dr Manfred Leitz 2 Vektoren im Raum A Grundbegriffe B Rechnen mit Vektoren C Der euklidische Betrag D Das euklidische Skalarprodukt E Vektorprodukt und Spatprodukt F Geraden und Ebenen im
Serie 8: Fakultativer Online-Test
 Prof Norbert Hungerbühler Lineare Algebra I Serie 8: Fakultativer Online-Test ETH Zürich - D-MAVT HS 215 1 Diese Serie besteht nur aus Multiple-Choice-Aufgaben und wird nicht vorbesprochen Die Nachbesprechung
Prof Norbert Hungerbühler Lineare Algebra I Serie 8: Fakultativer Online-Test ETH Zürich - D-MAVT HS 215 1 Diese Serie besteht nur aus Multiple-Choice-Aufgaben und wird nicht vorbesprochen Die Nachbesprechung
Zusammenfassung Mathe III. Themenschwerpunkt 3: Analytische Geometrie / lineare Algebra (ean) 1. Rechenregeln mit Vektoren
 1. Rechenregeln mit Vektoren") Zusammenfassung Mathe III Themenschwerpunkt 3: Analytische Geometrie / lineare Algebra (ean) 1. Rechenregeln mit Vektoren Definition: (1) anschaulich: Ein Vektor ist eine direkt gerichtete Verbindung zweier
Zusammenfassung Mathe III Themenschwerpunkt 3: Analytische Geometrie / lineare Algebra (ean) 1. Rechenregeln mit Vektoren Definition: (1) anschaulich: Ein Vektor ist eine direkt gerichtete Verbindung zweier
Matrizen spielen bei der Formulierung ökonometrischer Modelle eine zentrale Rolle: kompakte, stringente Darstellung der Modelle
 2. Matrixalgebra Warum Beschäftigung mit Matrixalgebra? Matrizen spielen bei der Formulierung ökonometrischer Modelle eine zentrale Rolle: kompakte, stringente Darstellung der Modelle bequeme mathematische
2. Matrixalgebra Warum Beschäftigung mit Matrixalgebra? Matrizen spielen bei der Formulierung ökonometrischer Modelle eine zentrale Rolle: kompakte, stringente Darstellung der Modelle bequeme mathematische
Ökonometrische Analyse
 Institut für Statistik und Ökonometrie, Freie Universität Berlin Ökonometrische Analyse Dieter Nautz, Gunda-Alexandra Detmers Rechenregeln für Matrizen Notation und Matrixeigenschaften: Eine Matrix A der
Institut für Statistik und Ökonometrie, Freie Universität Berlin Ökonometrische Analyse Dieter Nautz, Gunda-Alexandra Detmers Rechenregeln für Matrizen Notation und Matrixeigenschaften: Eine Matrix A der
mit "Skalarprodukt" aus i-tem "Zeilenvektor" und j-tem "Spaltenvektor"
 Zusammenfassung Matrizen Transponierte: Addition: mit Skalare Multiplikation: Matrixmultiplikation: m x p m x n n x p mit ES "Skalarprodukt" aus i-tem "Zeilenvektor" und j-tem "Spaltenvektor" "Determinante"
Zusammenfassung Matrizen Transponierte: Addition: mit Skalare Multiplikation: Matrixmultiplikation: m x p m x n n x p mit ES "Skalarprodukt" aus i-tem "Zeilenvektor" und j-tem "Spaltenvektor" "Determinante"
Determinante. Die Determinante. einer quadratischen Matrix A mit Spalten a j kann durch folgende Eigenschaften definiert werden.
 Determinante Die Determinante det A = det(a 1,..., a n ) einer quadratischen Matrix A mit Spalten a j kann durch folgende Eigenschaften definiert werden. Multilineariät: det(..., αa j + βb j,...) = α det(...,
Determinante Die Determinante det A = det(a 1,..., a n ) einer quadratischen Matrix A mit Spalten a j kann durch folgende Eigenschaften definiert werden. Multilineariät: det(..., αa j + βb j,...) = α det(...,
Vorkurs Mathematik B
 Vorkurs Mathematik B Dr. Thorsten Camps Fakultät für Mathematik TU Dortmund 20. September 2011 Definition (R n ) Wir definieren: 1 Der R 2 sei die Menge aller Punkte in der Ebene. Jeder Punkt wird in ein
Vorkurs Mathematik B Dr. Thorsten Camps Fakultät für Mathematik TU Dortmund 20. September 2011 Definition (R n ) Wir definieren: 1 Der R 2 sei die Menge aller Punkte in der Ebene. Jeder Punkt wird in ein
K. Eppler, Inst. f. Num. Mathematik Übungsaufgaben. 11. Übung: Woche vom
 Übungsaufgaben 11. Übung: Woche vom 9. 1.-13. 1. 2017 (Numerik): Heft Ü 1: 12.28.a,b; 12.29.b,c (jeweils mit Fehlerabschätzung); 6.26; 6.27.a (auch mit Lagrange-Interpolationspolynom); 6.25; 6.28 (auch
Übungsaufgaben 11. Übung: Woche vom 9. 1.-13. 1. 2017 (Numerik): Heft Ü 1: 12.28.a,b; 12.29.b,c (jeweils mit Fehlerabschätzung); 6.26; 6.27.a (auch mit Lagrange-Interpolationspolynom); 6.25; 6.28 (auch
3 Lineare Algebra (Teil 1): Lineare Unabhängigkeit
: Lineare Unabhängigkeit") 3 Lineare Algebra (Teil : Lineare Unabhängigkeit 3. Der Vektorraum R n Die Menge R n aller n-dimensionalen Spalten a reeller Zahlen a,..., a n R bildet bezüglich der Addition a b a + b a + b. +. :=. (53
3 Lineare Algebra (Teil : Lineare Unabhängigkeit 3. Der Vektorraum R n Die Menge R n aller n-dimensionalen Spalten a reeller Zahlen a,..., a n R bildet bezüglich der Addition a b a + b a + b. +. :=. (53
Lineare Algebra 2013 Lösungen für Test und Zusatzfragen
 Lineare Algebra 3 Lösungen für Test und Zusatzfragen Test Multiple Choice. Seien Für die Lösung x x x x 3 A, b des Systems Ax b gilt x 3 5 x 3 x 3 3 x 3 / Mit elementaren Zeilenoperationen erhalten wir
Lineare Algebra 3 Lösungen für Test und Zusatzfragen Test Multiple Choice. Seien Für die Lösung x x x x 3 A, b des Systems Ax b gilt x 3 5 x 3 x 3 3 x 3 / Mit elementaren Zeilenoperationen erhalten wir
Kapitel III. Lineare Abbildungen
 Kapitel III. Lineare Abbildungen Beispiele: 1 Lineare Abbildungen a) Seien c 1,..., c n K vorgegeben. Betrachte die Funktion F (x 1,..., x n ) = c 1 x 1 + c 2 x 2 +... + c n x n in den Variablen x 1,...,
Kapitel III. Lineare Abbildungen Beispiele: 1 Lineare Abbildungen a) Seien c 1,..., c n K vorgegeben. Betrachte die Funktion F (x 1,..., x n ) = c 1 x 1 + c 2 x 2 +... + c n x n in den Variablen x 1,...,
Wir stellen uns das Ziel, wesentliche Information über. Determinanten haben auch eine geometrische Bedeutung: Volumenbestimmung eines Parallelepipeds
 39 Determinanten 391 Motivation Wir stellen uns das Ziel, wesentliche Information über die Invertierbarkeit einer n n-matrix das Lösungsverhalten zugehöriger linearer Gleichungssysteme möglichst kompakt
39 Determinanten 391 Motivation Wir stellen uns das Ziel, wesentliche Information über die Invertierbarkeit einer n n-matrix das Lösungsverhalten zugehöriger linearer Gleichungssysteme möglichst kompakt
Skript zur Vorlesung. Lineare Algebra. Prof. Dr.-Ing. Katina Warendorf. 2. Oktober 2014
 Skript zur Vorlesung Prof. Dr.-Ing. Katina Warendorf 2. Oktober 2014 erstellt von Sindy Engel erweitert von Prof. Dr.-Ing. Katina Warendorf Inhaltsverzeichnis 1 Vektoren 4 1.1 Grundbegriffe.................................
Skript zur Vorlesung Prof. Dr.-Ing. Katina Warendorf 2. Oktober 2014 erstellt von Sindy Engel erweitert von Prof. Dr.-Ing. Katina Warendorf Inhaltsverzeichnis 1 Vektoren 4 1.1 Grundbegriffe.................................
Mathematik I. Vorlesung 14. Rang von Matrizen
 Prof Dr H Brenner Osnabrück WS 2009/2010 Mathematik I Vorlesung 14 Rang von Matrizen Definition 141 Es sei K ein Körper und sei M eine m n-matrix über K Dann nennt man die Dimension des von den Spalten
Prof Dr H Brenner Osnabrück WS 2009/2010 Mathematik I Vorlesung 14 Rang von Matrizen Definition 141 Es sei K ein Körper und sei M eine m n-matrix über K Dann nennt man die Dimension des von den Spalten
β 1 x :=., und b :=. K n β m
 44 Lineare Gleichungssysteme, Notations Betrachte das lineare Gleichungssystem ( ) Sei A = (α ij ) i=,,m j=,n α x + α x + + α n x n = β α x + α x + + α n x n = β α m x + α m x + + α mn x n = β m die Koeffizientenmatrix
44 Lineare Gleichungssysteme, Notations Betrachte das lineare Gleichungssystem ( ) Sei A = (α ij ) i=,,m j=,n α x + α x + + α n x n = β α x + α x + + α n x n = β α m x + α m x + + α mn x n = β m die Koeffizientenmatrix
Lineare Algebra I Vorlesung - Prof. Dr. Daniel Roggenkamp & Falko Gauß. Klausur: voraussichtlich Mittwoch,
 Lineare Algebra I - 2. Vorlesung - Prof. Dr. Daniel Roggenkamp & Falko Gauß Klausur: voraussichtlich Mittwoch, 4.2. 4:3 Uhr, A3 A 2 Mat(n, n; K) Dann ist 7 A : Mat(n, ; K)! Mat(n, ; K) b! A b ein Endomorphismus.
Lineare Algebra I - 2. Vorlesung - Prof. Dr. Daniel Roggenkamp & Falko Gauß Klausur: voraussichtlich Mittwoch, 4.2. 4:3 Uhr, A3 A 2 Mat(n, n; K) Dann ist 7 A : Mat(n, ; K)! Mat(n, ; K) b! A b ein Endomorphismus.
Vorbereitungskurs Mathematik zum Sommersemester 2011 Tag 7
 Vorbereitungskurs Mathematik zum Sommersemester 2011 Tag 7 Timo Stöcker Erstsemestereinführung Informatik TU Dortmund 22. März 2011 Heute Themen Lineare Gleichungssysteme Matrizen Timo Stöcker https://fsinfo.cs.tu-dortmund.de/studis/ese/vorkurse/mathe
Vorbereitungskurs Mathematik zum Sommersemester 2011 Tag 7 Timo Stöcker Erstsemestereinführung Informatik TU Dortmund 22. März 2011 Heute Themen Lineare Gleichungssysteme Matrizen Timo Stöcker https://fsinfo.cs.tu-dortmund.de/studis/ese/vorkurse/mathe
5.4 Basis, Lineare Abhängigkeit
 die allgemeine Lösung des homogenen Systems. Wieder ist 2 0 L i = L h + 0 1 Wir fassen noch einmal zusammen: Ein homogenes lineares Gleichungssystem A x = 0 mit m Gleichungen und n Unbekannten hat n Rang(A)
die allgemeine Lösung des homogenen Systems. Wieder ist 2 0 L i = L h + 0 1 Wir fassen noch einmal zusammen: Ein homogenes lineares Gleichungssystem A x = 0 mit m Gleichungen und n Unbekannten hat n Rang(A)
Lineare Gleichungssysteme - Grundlagen
 Lineare Gleichungssysteme - Grundlagen Betrachtet wird ein System linearer Gleichungen (im deutschen Sprachraum: lineares Gleichungssystem mit m Gleichungen für n Unbekannte, m, n N. Gegeben sind m n Elemente
Lineare Gleichungssysteme - Grundlagen Betrachtet wird ein System linearer Gleichungen (im deutschen Sprachraum: lineares Gleichungssystem mit m Gleichungen für n Unbekannte, m, n N. Gegeben sind m n Elemente
Nützliches Hilfsmittel (um Schreiberei zu reduzieren): 'Erweiterte Matrix': Gauß- Verfahren
: 'Erweiterte Matrix': Gauß- Verfahren") L5.4 Inverse einer Matrix Ausgangsfrage: Wie löst man ein lineares Gleichungsystem (LSG)? Betrachte n lineare Gleichungen für n Unbekannte: Ziel: durch geeignete Umformungen bringe man das LSG in folgende
L5.4 Inverse einer Matrix Ausgangsfrage: Wie löst man ein lineares Gleichungsystem (LSG)? Betrachte n lineare Gleichungen für n Unbekannte: Ziel: durch geeignete Umformungen bringe man das LSG in folgende
FH Gießen-Friedberg, FB 06 (MNI) Skript 8 Mathematik 1 für KMUB 5./7. November 2008 Prof. Dr. H.-R. Metz. Matrizen 1. a m1 a m2 a m3 a mn
 Skript 8 Mathematik 1 für KMUB 5./7. November 2008 Prof. Dr. H.-R. Metz. Matrizen 1. a m1 a m2 a m3 a mn") FH Gießen-Friedberg, FB 06 (MNI) Skript 8 Mathematik 1 für KMUB./7. November 2008 Prof. Dr. H.-R. Metz (Matrix) Matrizen 1 Ein System von Zahlen a ik, die rechteckig in m Zeilen und n Spalten angeordnet
FH Gießen-Friedberg, FB 06 (MNI) Skript 8 Mathematik 1 für KMUB./7. November 2008 Prof. Dr. H.-R. Metz (Matrix) Matrizen 1 Ein System von Zahlen a ik, die rechteckig in m Zeilen und n Spalten angeordnet
Definitionen. Merkblatt lineare Algebra. affiner Teilraum Menge, die durch Addition eines Vektors v 0 zu allen Vektoren eines Vektorraumes V entsteht
 Seite 1 Definitionen affiner Teilraum Menge, die durch Addition eines Vektors v 0 zu allen Vektoren eines Vektorraumes V entsteht ähnliche Matrizen Matrizen, die das gleiche charakteristische Polynom haben
Seite 1 Definitionen affiner Teilraum Menge, die durch Addition eines Vektors v 0 zu allen Vektoren eines Vektorraumes V entsteht ähnliche Matrizen Matrizen, die das gleiche charakteristische Polynom haben
4 Vorlesung: 21.11. 2005 Matrix und Determinante
 4 Vorlesung: 2111 2005 Matrix und Determinante 41 Matrix und Determinante Zur Lösung von m Gleichungen mit n Unbekannten kann man alle Parameter der Gleichungen in einem rechteckigen Zahlenschema, einer
4 Vorlesung: 2111 2005 Matrix und Determinante 41 Matrix und Determinante Zur Lösung von m Gleichungen mit n Unbekannten kann man alle Parameter der Gleichungen in einem rechteckigen Zahlenschema, einer
Wirtschaftsmathematik Plus für International Management (BA) und Betriebswirtschaft (BA)
 und Betriebswirtschaft (BA)") Wirtschaftsmathematik Plus für International Management (BA) und Betriebswirtschaft (BA) Wintersemester 2012/13 Hochschule Augsburg Lineare : Einführung Beispiele linearer a) b) c) 2x 1 3x 2 = 1 x 1 +
Wirtschaftsmathematik Plus für International Management (BA) und Betriebswirtschaft (BA) Wintersemester 2012/13 Hochschule Augsburg Lineare : Einführung Beispiele linearer a) b) c) 2x 1 3x 2 = 1 x 1 +
Das innere Produkt von zwei Vektoren in V entspricht dem standard Skalarprodukt ihrer Komponenten bezüglich einer Orthonormalbasis von V.
 L5.6 Orthogonale und unitäre Matrizen (invertierbare Abbildungen, die reelles bzw. komplexes Skalarprodukt invariant lassen) Reelles inneres Produkt in -Vektorraum [siehe L3.1b]: 'reeller Vektorraum' (i)
L5.6 Orthogonale und unitäre Matrizen (invertierbare Abbildungen, die reelles bzw. komplexes Skalarprodukt invariant lassen) Reelles inneres Produkt in -Vektorraum [siehe L3.1b]: 'reeller Vektorraum' (i)
Matrizen spielen bei der Formulierung ökonometrischer Modelle eine zentrale Rolle: kompakte, stringente Darstellung der Modelle
 2. Matrixalgebra Warum Beschäftigung mit Matrixalgebra? Matrizen spielen bei der Formulierung ökonometrischer Modelle eine zentrale Rolle: kompakte, stringente Darstellung der Modelle bequeme mathematische
2. Matrixalgebra Warum Beschäftigung mit Matrixalgebra? Matrizen spielen bei der Formulierung ökonometrischer Modelle eine zentrale Rolle: kompakte, stringente Darstellung der Modelle bequeme mathematische
Kapitel 6: Matrixrechnung (Kurzeinführung in die Lineare Algebra)
") Kapitel 6: Matrixrechnung (Kurzeinführung in die Lineare Algebra) Matrix: (Plural: Matrizen) Vielfältige Anwendungen in der Physik: - Lösung von linearen Gleichungsystemen - Beschreibung von Drehungen
Kapitel 6: Matrixrechnung (Kurzeinführung in die Lineare Algebra) Matrix: (Plural: Matrizen) Vielfältige Anwendungen in der Physik: - Lösung von linearen Gleichungsystemen - Beschreibung von Drehungen
a 1 a 1 A = a n . det = λ det a i
 49 Determinanten Für gegebene Vektoren a 1,,a n K n, betrachte die Matrix deren Zeilenvektoren a 1,,a n sind, also A = Ab sofort benutzen wir diese bequeme Schreibweise Definition Sei M : K n K }{{ n K
49 Determinanten Für gegebene Vektoren a 1,,a n K n, betrachte die Matrix deren Zeilenvektoren a 1,,a n sind, also A = Ab sofort benutzen wir diese bequeme Schreibweise Definition Sei M : K n K }{{ n K
Klausurenkurs zum Staatsexamen (SS 2015): Lineare Algebra und analytische Geometrie 3
: Lineare Algebra und analytische Geometrie 3") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (SS 205): Lineare Algebra und analytische Geometrie 3 3. (Herbst 997, Thema 3, Aufgabe ) Berechnen Sie die Determinante der reellen Matrix 0 2 0 2 2 2
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (SS 205): Lineare Algebra und analytische Geometrie 3 3. (Herbst 997, Thema 3, Aufgabe ) Berechnen Sie die Determinante der reellen Matrix 0 2 0 2 2 2
Der Rang einer Matrix A. Beispiel
 Der Rang einer Matrix A ist gleich Anzahl der Zeilen ungleich 0, nachdem die Matrix durch elementare Zeilenoperationen in Zeilenstufenform gebracht worden ist. Bezeichnung: ranga oder rga. Beispiel A =
Der Rang einer Matrix A ist gleich Anzahl der Zeilen ungleich 0, nachdem die Matrix durch elementare Zeilenoperationen in Zeilenstufenform gebracht worden ist. Bezeichnung: ranga oder rga. Beispiel A =
Lineare Algebra. Mathematik II für Chemiker. Daniel Gerth
 Lineare Algebra Mathematik II für Chemiker Daniel Gerth Überblick Lineare Algebra Dieses Kapitel erklärt: Was man unter Vektoren versteht Wie man einfache geometrische Sachverhalte beschreibt Was man unter
Lineare Algebra Mathematik II für Chemiker Daniel Gerth Überblick Lineare Algebra Dieses Kapitel erklärt: Was man unter Vektoren versteht Wie man einfache geometrische Sachverhalte beschreibt Was man unter
Lineare Gleichungssysteme und Matrizen
 Kapitel 11 Lineare Gleichungssysteme und Matrizen Ein lineares Gleichungssystem (lgs) mit m linearen Gleichungen in den n Unbekannten x 1, x 2,..., x n hat die Gestalt: Mit a 11 x 1 + a 12 x 2 + a 13 x
Kapitel 11 Lineare Gleichungssysteme und Matrizen Ein lineares Gleichungssystem (lgs) mit m linearen Gleichungen in den n Unbekannten x 1, x 2,..., x n hat die Gestalt: Mit a 11 x 1 + a 12 x 2 + a 13 x
Lineare Abhängigkeit und Unabhängigkeit. 1-E Ma 1 Lubov Vassilevskaya
 Lineare Abhängigkeit und Unabhängigkeit -E Ma Lubov Vassilevskaya Eindimensionaler Raum Abb. -: Zwei nicht gleiche Vektoren auf der gleichen Gerade Jeden Vektor, der auf einer Geraden liegt, kann man durch
Lineare Abhängigkeit und Unabhängigkeit -E Ma Lubov Vassilevskaya Eindimensionaler Raum Abb. -: Zwei nicht gleiche Vektoren auf der gleichen Gerade Jeden Vektor, der auf einer Geraden liegt, kann man durch
Lineare Algebra und Numerische Mathematik für D-BAUG
 P Grohs T Welti F Weber Herbstsemester 25 Lineare Algebra und Numerische Mathematik für D-BAUG ETH Zürich D-MATH Beispiellösung für Serie 8 Aufgabe 8 Basen für Bild und Kern Gegeben sind die beiden 2 Matrizen:
P Grohs T Welti F Weber Herbstsemester 25 Lineare Algebra und Numerische Mathematik für D-BAUG ETH Zürich D-MATH Beispiellösung für Serie 8 Aufgabe 8 Basen für Bild und Kern Gegeben sind die beiden 2 Matrizen:
TECHNISCHE UNIVERSITÄT MÜNCHEN FERIENKURS. Lineare Algebra FLORIAN NIEDERREITER & AILEEN WOLF
 TECHNISCHE UNIVERSITÄT MÜNCHEN FERIENKURS Lineare Algebra FLORIAN NIEDERREITER & AILEEN WOLF 07.03.2016-11.03.2016 Inhaltsverzeichnis Inhaltsverzeichnis 1 Rechnen mit Matrizen 2 1.1 Matrixmultiplikation............................................
TECHNISCHE UNIVERSITÄT MÜNCHEN FERIENKURS Lineare Algebra FLORIAN NIEDERREITER & AILEEN WOLF 07.03.2016-11.03.2016 Inhaltsverzeichnis Inhaltsverzeichnis 1 Rechnen mit Matrizen 2 1.1 Matrixmultiplikation............................................
5. Matrizen und Determinanten
 technische universität dortmund Dortmund, im Januar 01 Fakultät für Mathematik Prof Dr H M Möller Lineare Algebra für Lehramt Gymnasien und Berufskolleg Zusammenfassung der Abschnitte 1 und Matrizen und
technische universität dortmund Dortmund, im Januar 01 Fakultät für Mathematik Prof Dr H M Möller Lineare Algebra für Lehramt Gymnasien und Berufskolleg Zusammenfassung der Abschnitte 1 und Matrizen und
Orthonormalbasis. Orthogonalentwicklung
 Orthonormalbasis Eine Orthogonal- oder Orthonormalbasis des R n (oder eines Teilraums) ist eine Basis {v,..., v n } mit v i = und v i, v j = für i j, d. h. alle Basisvektoren haben Norm und stehen senkrecht
Orthonormalbasis Eine Orthogonal- oder Orthonormalbasis des R n (oder eines Teilraums) ist eine Basis {v,..., v n } mit v i = und v i, v j = für i j, d. h. alle Basisvektoren haben Norm und stehen senkrecht
Mathematik 2 für Naturwissenschaften
 Hans Walser Mathematik 2 für Naturwissenschaften Modul 212 Determinanten Hans Walser: Modul 212, Determinanten ii Modul 212 für die Lehrveranstaltung Mathematik 2 für Naturwissenschaften Sommer 2003 Probeausgabe
Hans Walser Mathematik 2 für Naturwissenschaften Modul 212 Determinanten Hans Walser: Modul 212, Determinanten ii Modul 212 für die Lehrveranstaltung Mathematik 2 für Naturwissenschaften Sommer 2003 Probeausgabe
Vorlesung Mathematik für Ingenieure 3 (Wintersemester 2009/10)
") 1 Vorlesung Mathematik für Ingenieure 3 (Wintersemester 2009/10) Kapitel 14: Vektorräume und lineare Abbildungen Volker Kaibel Otto-von-Guericke Universität Magdeburg (Version vom 6. Oktober 2009) Vektorräume
1 Vorlesung Mathematik für Ingenieure 3 (Wintersemester 2009/10) Kapitel 14: Vektorräume und lineare Abbildungen Volker Kaibel Otto-von-Guericke Universität Magdeburg (Version vom 6. Oktober 2009) Vektorräume
Proseminar Lineare Algebra WS 08/09 Prof. Dr. O. Bogopolski 1. Vortrag: Lineare Gleichungen. am 11. März von Maximilian Wahner
 Proseminar Lineare Algebra WS 08/09 Prof. Dr. O. Bogopolski 1 Vortrag: Lineare Gleichungen am 11. März 2009 von Maximilian Wahner Technische Universität Dortmund Fakultät für Mathematik Proseminar Lineare
Proseminar Lineare Algebra WS 08/09 Prof. Dr. O. Bogopolski 1 Vortrag: Lineare Gleichungen am 11. März 2009 von Maximilian Wahner Technische Universität Dortmund Fakultät für Mathematik Proseminar Lineare
Lineare Gleichungssysteme
 Lineare Gleichungssysteme Definition. Sei K ein Körper, a ij K für 1 i m, 1 j n und b 1,..., b m K. Dann heißt a 11 x 1 + a 12 x 2 +... + a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... + a 2n x n = b 2......
Lineare Gleichungssysteme Definition. Sei K ein Körper, a ij K für 1 i m, 1 j n und b 1,..., b m K. Dann heißt a 11 x 1 + a 12 x 2 +... + a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... + a 2n x n = b 2......
2 Matrizenrechnung und Lineare Gleichungssysteme
 Technische Universität München Florian Ettlinger Ferienkurs Lineare Algebra Vorlesung Dienstag WS 2011/12 2 Matrizenrechnung und Lineare Gleichungssysteme 2.1 Matrizenrechnung 2.1.1 Einführung Vor der
Technische Universität München Florian Ettlinger Ferienkurs Lineare Algebra Vorlesung Dienstag WS 2011/12 2 Matrizenrechnung und Lineare Gleichungssysteme 2.1 Matrizenrechnung 2.1.1 Einführung Vor der
Klausurenkurs zum Staatsexamen (WS 2015/16): Lineare Algebra und analytische Geometrie 3
: Lineare Algebra und analytische Geometrie 3") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 205/6): Lineare Algebra und analytische Geometrie 3 3. (Herbst 997, Thema 3, Aufgabe ) Berechnen Sie die Determinante der reellen Matrix 0 2 0 2 2
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 205/6): Lineare Algebra und analytische Geometrie 3 3. (Herbst 997, Thema 3, Aufgabe ) Berechnen Sie die Determinante der reellen Matrix 0 2 0 2 2
Lineare Algebra. 1 Lineare Abbildungen
 Lineare Algebra Die lineare Algebra ist ein Teilgebiet der Mathematik, welches u. A. zur Beschreibung geometrischer Abbildungen und diverser Prozesse und zum Lösen linearer Gleichungssysteme mit Hilfe
Lineare Algebra Die lineare Algebra ist ein Teilgebiet der Mathematik, welches u. A. zur Beschreibung geometrischer Abbildungen und diverser Prozesse und zum Lösen linearer Gleichungssysteme mit Hilfe
9 Matrizen über R und C
 Mathematik für Physiker I, WS 00/0 Montag 0 $Id: matrixtex,v 6 0/0/0 :6:7 hk Exp $ $Id: dettex,v 0/0/0 ::59 hk Exp hk $ 9 Matrizen über R und C 9 Transposition von Matrizen Im letzten Abschnitt hatten
Mathematik für Physiker I, WS 00/0 Montag 0 $Id: matrixtex,v 6 0/0/0 :6:7 hk Exp $ $Id: dettex,v 0/0/0 ::59 hk Exp hk $ 9 Matrizen über R und C 9 Transposition von Matrizen Im letzten Abschnitt hatten
5.1 Determinanten der Ordnung 2 und 3. a 11 a 12 a 21 a 22. det(a) =a 11 a 22 a 12 a 21. a 11 a 21
 =a 11 a 22 a 12 a 21. a 11 a 21") 5. Determinanten 5.1 Determinanten der Ordnung 2 und 3 Als Determinante der zweireihigen Matrix A = a 11 a 12 bezeichnet man die Zahl =a 11 a 22 a 12 a 21. Man verwendet auch die Bezeichnung = A = a 11
5. Determinanten 5.1 Determinanten der Ordnung 2 und 3 Als Determinante der zweireihigen Matrix A = a 11 a 12 bezeichnet man die Zahl =a 11 a 22 a 12 a 21. Man verwendet auch die Bezeichnung = A = a 11
a 11 a 12 a 1(m 1) a 1m a n1 a n2 a n(m 1) a nm Matrizen Betrachten wir das nachfolgende Rechteckschema:
 a 1m a n1 a n2 a n(m 1) a nm Matrizen Betrachten wir das nachfolgende Rechteckschema:") Matrizen Betrachten wir das nachfolgende Rechteckschema: a 12 a 1(m 1 a 1m a n1 a n2 a n(m 1 a nm Ein solches Schema nennt man (n m-matrix, da es aus n Zeilen und m Spalten besteht Jeder einzelne Eintrag
Matrizen Betrachten wir das nachfolgende Rechteckschema: a 12 a 1(m 1 a 1m a n1 a n2 a n(m 1 a nm Ein solches Schema nennt man (n m-matrix, da es aus n Zeilen und m Spalten besteht Jeder einzelne Eintrag