Anwendungen des Fréchet-Abstandes Das Constrained Free Space Diagram zur Analyse von Körperbewegungen
|
|
|
- Hilko Kappel
- vor 7 Jahren
- Abrufe
Transkript
1 Anwendungen des Fréchet-Abstandes Das Constrained Free Space Diagram zur Analyse von Körperbewegungen David Knötel Freie Universität Berlin, Institut für Informatik Seminar über Algorithmen

2 Leitfaden Wiederholung Constrained Free Space Diagram Following Behind Single File Movement Evaluation der Daten Anwendungen des Fréchet-Abstandes,

3 Leitfaden Wiederholung Constrained Free Space Diagram Following Behind Single File Movement Evaluation der Daten Anwendungen des Fréchet-Abstandes,

4 Wiederholung Gesucht: Sinnvolles Maß für den Abstand zweier Kurven f : [a 1, b 1 ] R n und g : [a 2, b 2 ] R n Lösung: Einführung des Fréchet-Abstandes Anwendungen des Fréchet-Abstandes,
![[a 2, b 2 ] R n Lösung: Einführung des](/docs-images/45/23284164/images/page_4.jpg "Fréchet-Abstandes Anwendungen des")
5 Definition Seien f : I = [a 1, b 1 ] R n und g : J = [a 2, b 2 ] R n zwei Kurven. Dann ist der Fréchet-Abstand definiert als δ F (f, g) = inf max f (α(t)) g(β(t)) α:[0,1] I t [0,1] β:[0,1] J mit α(0) = a 1, α(1) = b 1, β(0) = a 2, β(1) = b 2 und α, β sind stetig, monoton steigend. Anwendungen des Fréchet-Abstandes,
![α:[0,1] I t [0,1] β:[0,1] J mit α(0) = a 1, α(1) = b 1, β(0) = a 2, β(1) = b 2 und](/docs-images/45/23284164/images/page_5.jpg "α, β sind stetig, monoton steigend. Anwendungen des Fréchet-Abstandes, 22.06.")
6 Vereinfachung Statt beliebiger Kurven werden Polygonzüge betrachtet. f ist Kurve mit p Punkten p 1,..., p p, so dass f : [1, p] R n mit f (1) = p 1,..., f (p) = p p gilt und dazwischen linear interpoliert wird g ist Kurve mit q Punkten q 1,..., q q, so dass f : [1, q] R n mit g(1) = q 1,..., g(q) = q q gilt und dazwischen linear interpoliert wird Anwendungen des Fréchet-Abstandes,
 = q 1,.")
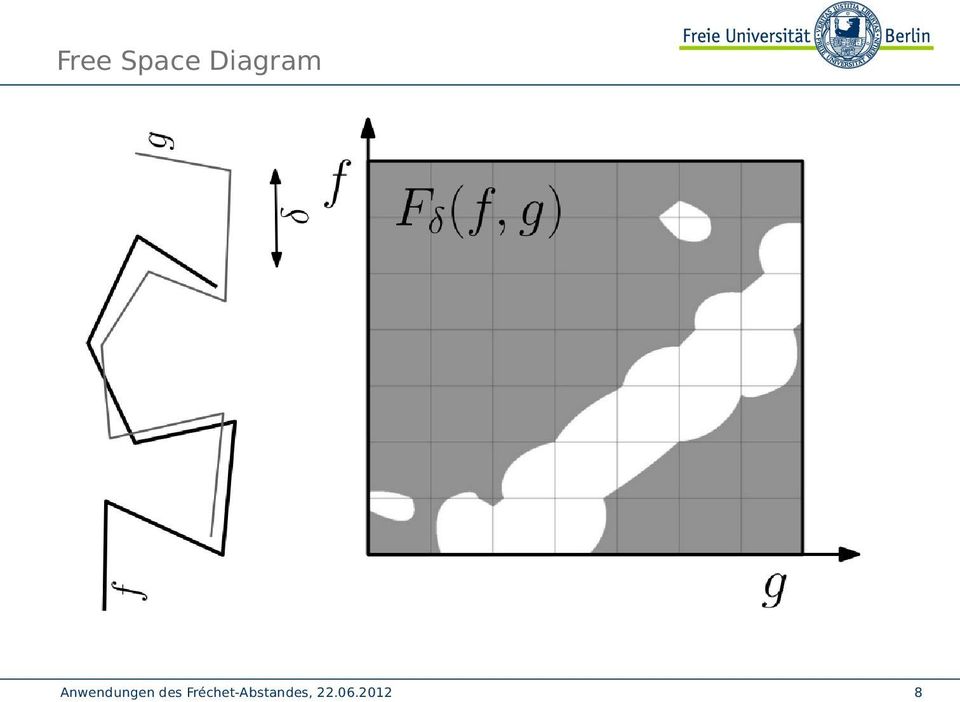
7 Free Space Diagram Entscheidungsproblem: Ist der Fréchet-Abstand zweier Kurven kleiner gleich einem gegebenen ε? Lösung mit Hilfe des Free Space Diagram Definition: F ε (f, g) = {(s, t) [1, p] [1, q] : f (s) g(t) ε} Anwendungen des Fréchet-Abstandes,
 [1, p] [1, q] : f (s) g(t) ε} Anwendungen des")

8 Free Space Diagram Anwendungen des Fréchet-Abstandes,
9 Free Space Diagram Der Fréchet-Abstand zweier Kurven ist kleiner gleich ε gdw. ein monoton steigender Weg durch den Free Space von (1,1) nach (p,q) existiert. Der Fréchet-Abstand zweier Kurven ist kleiner gleich ε gdw. der Punkt (p,q) Element des entsprechenden Reachable Free Space ist. Laufzeit für Entscheidungsproblem: O(p q) Anwendungen des Fréchet-Abstandes,
 Element des entsprechenden Reachable Free Space ist.")
10 Leitfaden Wiederholung Constrained Free Space Diagram Following Behind Single File Movement Evaluation der Daten Anwendungen des Fréchet-Abstandes,

11 Erweiterte Aufgabenstellung Jetzt: Bewegungen von Objekten im Verlauf der Zeit analysieren, d.h. automatisiert Muster in Bewegungen erkennen Beispiele: Folgen die Objekte einander? (following behind bzw. single file movement) Gibt es ein einzelnes führendes Objekt? (leadership) Bewegen sie sich als Gruppe? (flock) Gibt es Orte, die häufig wieder besucht werden? (popular places) verschiedenes Terrain beachten Mindestgeschwindigkeit der Körper vorschreiben Definitionsbereich entspricht der Zeit, Wertebereich der Position des Objektes Anwendungen des Fréchet-Abstandes,
 Gibt es Orte, die häufig wieder besucht werden?")
12 Genaue Problemstellung Statt beliebiger Kurven werden wieder Polygonzüge betrachtet. f ist eine Kurve, die sich zu den Zeitpunkten s 1,..., s p an den Orten p 1,..., p p befindet. Es gilt demnach f (s 1 ) = p 1,..., f (s p ) = p p. Dazwischen wird linear interpoliert. g ist eine Kurve, die sich zu den Zeitpunkten t 1,..., t q an den Orten q 1,..., q q befindet. Es gilt demnach g(t 1 ) = q 1,..., g(t q ) = q q. Dazwischen wird linear interpoliert. Anwendungen des Fréchet-Abstandes,

13 Definition Idee: Erweiterung des Free Space Diagrams um weitere Bedingungen/Constraints Definition des Constraint Free Space Diagram: F C (f, g) = {(s, t) [s 1, s p ] [t 1, t q ] : C((f (s), A f (s)), (g(t), A g (t)))} mit einer Prädikatsfunktion C und Attributmengen A f, A g. Free Space Diagram ist ein Beispiel für ein Constraint Free Space Diagram: F ε (f, g) = {(s, t) [1, p] [1, q] : f (s) g(t) ε} Anwendungen des Fréchet-Abstandes,
 = {(s, t) [1, p] [1, q] :")
14 Free Space Diagram Anwendungen des Fréchet-Abstandes,

15 Constraints Typ 1: Direkt die Wertepaare betreffend Zeitconstraints Ortsconstraints Sonstige Attribute Typ 2: Den Weg durch das Diagramm betreffend Anwendungen des Fréchet-Abstandes,

16 Algorithmus / Laufzeit Feststellung: Algorithmus/Laufzeit ist abhängig von der Wahl der Constraints Zentrale Fragen: Wie zeitaufwendig ist die Berechnung für 2 Punkte? Kann der bekannte Algorithmus wie beim Free Space Diagram genutzt werden? Ziel: Weiterverwendung des bisherigen Algorithmus über dem Free Space Diagram, d.h. Zelleninhalte müssen konvex sein. Anwendungen des Fréchet-Abstandes,

17 Beispiel 1: Anderes Abstandsmaß Sichtbarkeit als Abstandskriterium, entspricht Ortsconstraint Anwendungen des Fréchet-Abstandes,

18 Beispiel 2: ähnliche Geschwindigkeit erlaubte Steigung des Pfades wird eingeschränkt, entspricht Typ 2 Constraint Anwendungen des Fréchet-Abstandes,

19 Leitfaden Wiederholung Constrained Free Space Diagram Following Behind Single File Movement Evaluation der Daten Anwendungen des Fréchet-Abstandes,

20 Einführung Idee: Körper A folgt Körper B bedeutet, dass sich Körper A etwas zeitverzögert in der Nähe von Körper B befindet zeitverzögert Zeitconstraint in der Nähe von Ortsconstraint Anwendungen des Fréchet-Abstandes,

21 Definition Sei a 1 ein Körper mit parametrisierter Kurve f 1 über dem Zeitintervall [s 1, t 2 ] und sei a 2 ein Körper mit parametrisierter Kurve f 2 über dem Zeitintervall [s 1, t 2 ]. Weiterhin sei s 2 [s 1 + τ min, s 1 + τ max ] und t 2 [t 1 + τ min, t 1 + τ max ]. Dann folgt Körper a 1 dem Körper a 2 über dem Zeitintervall [s 2, t 2 ], wenn t [s 2, t 2 ] : σ(t) [t τ max, t τ min ] d(f 1 (t), f 2 (σ(t)) δ mit einer stetigen, bijektiven Funktion σ : [s 2, t 2 ] [s 1, t 1 ] mit σ(s 2 ) = s 1. Anwendungen des Fréchet-Abstandes,
22 Constraint free space diagram Umformulierung des Problems in ein Constraint Free Space Diagram: F C (f 1, f 2 ) = {(s, t) s t [τ min, τ max ] d(f 1 (s), f 2 (t)) δ} Welche Constraints wurden gesetzt? Ein Zeitconstraint Ein Ortsconstraint Anwendungen des Fréchet-Abstandes,
23 Bild Anwendungen des Fréchet-Abstandes,
24 Satz Körper a 1 auf Kurve f 1 folgt Körper a 2 auf Kurve f 2 im Zeitintervall [s 2, t 2 ], gdw. das Constrained Free Space Diagram F C (f 1, f 2 ) = {(s, t) s t [τ min, τ max ] d(f 1 (s), f 2 (t)) δ} einen monoton steigenden Pfad von (s 2, s 1 ) nach (t 2, t 1 ) enthält. Anwendungen des Fréchet-Abstandes,
25 Laufzeit des Algorithmus Laufzeit: O(n k) mit k ist die Anzahl der Spalten, die vom Streifen berührt werden und jeweils n Stützpunkten pro Kurve Anwendungen des Fréchet-Abstandes,
26 Wahl der Parameter, striktes Folgen Wahl der passenden Parameter τ min, τ max und δ ist äußerst wichtig bei schlechter Parameterwahl kann es passieren, dass zwei Körper sich gegenseitig folgen Definition: Körper a 1 folgt Körper a 2 strikt, gdw. a 1 a 2 folgt, aber nicht a 2 a 1 folgt. Definition: Ein Körper a mit parametrisierter Kurve f erfüllt die travel condition im Zeitintervall T, gdw. t T : f (t) N 2δ (f ([t 2τ max, t 2τ min ])) mit N α (B) = {x y B : d(x, y) α} Anwendungen des Fréchet-Abstandes,
27 travel condition Lemma: Wenn a 1 oder a 2 die travel condition erfüllen, dann können sie sich nicht gegenseitig in einem Intervall der Länge τ max folgen. Beweis: Angenommen es existiert ein t T, so dass a 1 und a 2 sich gegenseitig im Zeitintervall [t, t + τ max ] folgen und a 1 erfüllt die travel condition. Dann gilt: f 1 (t + τ max ) N δ (f 2 [t, t + τ max τ min ]) N δ (N δ (f 1 [t τ max, t + τ max 2τ min ])) = N 2δ (f 1 [t + τ max 2τ max, t + τ max 2τ min ]) Widerspruch Anwendungen des Fréchet-Abstandes,
28 Leitfaden Wiederholung Constrained Free Space Diagram Following Behind Single File Movement Evaluation der Daten Anwendungen des Fréchet-Abstandes,
29 Einführung Ziel: Finden von following behind Strukturen in den Bewegungen von m Körpern a 1,..., a m Verschiedene Arten feste Zeitspanne oder variable Zeitspanne feste Reihenfolge oder variable Reihenfolge die ganze Menge oder eine Teilmenge Algorithmen auf m Körpern benutzen following-algorithmus auf zwei Körpern Polygonzüge bestehen ab jetzt immer aus n Punkten Anwendungen des Fréchet-Abstandes,
30 Zwei Körper: feste Zeitspanne Laufzeit: O(n k) Anwendungen des Fréchet-Abstandes,
31 Zwei Körper: variable Zeitspanne Laufzeit: O(n k 2 ) Anwendungen des Fréchet-Abstandes,
32 m Körper: feste Zeitspanne, feste Reihenfolge, keine Teilmenge Ziel: Testen, ob a 1 a 2 a 3 a m, wobei a 1 a 2 bedeutet, dass a 1 a 2 folgt Teste jeweils zwei Nachbarn miteinander auf following Laufzeit: O(m nk) Anwendungen des Fréchet-Abstandes,
33 m Körper: feste Zeitspanne, variable Reihenfolge, mit Teilmengen alle Kombinationen untereinander sind möglich Laufzeit für Aufbau des Graphen: O(m 2 nk) Laufzeit um längste Wege zu finden: O(m 2 ) Anwendungen des Fréchet-Abstandes,
34 m Körper: variable Zeitspanne, variable Reihenfolge, mit Teilmengen alle Kombinationen untereinander sind möglich; außerdem verschiedene Zeiträume Laufzeit für Aufbau des Graphen: O(m 2 nk 2 ) Laufzeit um längste Wege in bestimmtem Zeitintervall zu finden: O(m 2 ) Anwendungen des Fréchet-Abstandes,
35 Zusammenfassung der Laufzeiten 2 Körper, feste Zeitspanne: 2 Körper, variable Zeitspanne: O(n k) O(nk 2 ) m Körper, feste Zeitspanne, feste Reihenfolge, keine Teilmenge: O(m nk) m Körper, feste Zeitspanne, variable Reihenfolge, mit Teilmengen: O(m 2 nk) m Körper, variable Zeitspanne, variable Reihenfolge, mit Teilmengen: O(m 2 nk 2 ) Anwendungen des Fréchet-Abstandes,
36 Leitfaden Wiederholung Constrained Free Space Diagram Following Behind Single File Movement Evaluation der Daten Anwendungen des Fréchet-Abstandes,
37 Evaluation der Daten Fokussierung auf Bewegung von zwei Körpern Test 1: Bewegung von zwei Fahrradfahrern Test 2: künstlicher Datensatz Anwendungen des Fréchet-Abstandes,
38 Evaluation: Bewegung von zwei Fahrradfahrern Abbildung: Bewegung von zwei Fahrradfahrern Anwendungen des Fréchet-Abstandes,
39 Evaluation: Bewegung von zwei Fahrradfahrern τ min δ ,3 94,3 97,1 99,3 99,5 99, ,3 64,1 55,6 48,0 44,3 37,6 30,3 80,7 90,0 94,0 96,7 98,0 99,3 99,5 91,4 79,3 65,2 59,4 54,4 45,2 39,8 72,4 83,9 89,5 92,1 93,6 96,8 98,1 97,6 92,0 85,5 73,3 63,9 57,1 50,8 58,7 71,3 81,0 85,6 90,1 92,4 93,7 99,3 95,0 92,0 89,4 83,4 69,0 61,5 34,7 56,2 67,2 74,8 82,1 85,7 90,9 99,7 96,5 95,2 92,3 91,7 88,7 77,5 14,4 31,3 42,6 58,8 68,1 75,1 83,2 98,3 96,9 96,7 95,8 93,2 92,5 90,1 Tabelle: τ max = 10 Anwendungen des Fréchet-Abstandes,
40 Danke Vielen Dank für Ihre Aufmerksamkeit. Anwendungen des Fréchet-Abstandes,
41 Quellen Buchin, Kevin ; Buchin, Maike ; Gudmundsson, Joachim: Constrained free space diagrams: a tool for trajectory analysis. In: International Journal of Geographical Infformation Science 24 (2010), Alt, Helmut ; Godau, Michael: Computing the Fréchet distance between two polygonal curves. In: International Journal of Computational Geometry and Applications 5 (1995), Anwendungen des Fréchet-Abstandes,
42 Bildquellen alle Abbildungen sind dem Paper Constrained free space diagrams: a tool for trajectory analysis entnommen, siehe Quellen Anwendungen des Fréchet-Abstandes,
Algorithmen für Geographische Informationssysteme
 Algorithmen für Geographische Informationssysteme 2. Vorlesung: 16. April 2014 Thomas van Dijk basiert auf Folien von Jan-Henrik Haunert Map Matching? Map Matching! Map Matching...als Teil von Fahrzeugnavigationssystemen
Algorithmen für Geographische Informationssysteme 2. Vorlesung: 16. April 2014 Thomas van Dijk basiert auf Folien von Jan-Henrik Haunert Map Matching? Map Matching! Map Matching...als Teil von Fahrzeugnavigationssystemen
12. Trennungssätze für konvexe Mengen 83
 12. Trennungssätze für konvexe Mengen 83 C_1 C_2 a Abbildung 12.4. Trennung konvexer Mengen durch eine Hyperebene mit Normalenvektor a Dann ist int(c) nicht leer (warum?) und [als Minkowski-Summe von C
12. Trennungssätze für konvexe Mengen 83 C_1 C_2 a Abbildung 12.4. Trennung konvexer Mengen durch eine Hyperebene mit Normalenvektor a Dann ist int(c) nicht leer (warum?) und [als Minkowski-Summe von C
Vollständigkeit. 1 Konstruktion der reellen Zahlen
 Vortrag im Rahmen des Proseminars zur Analysis, 17.03.2006 Albert Zeyer Ziel des Vortrags ist es, die Vollständigkeit auf Basis der Konstruktion von R über die CAUCHY-Folgen zu beweisen und äquivalente
Vortrag im Rahmen des Proseminars zur Analysis, 17.03.2006 Albert Zeyer Ziel des Vortrags ist es, die Vollständigkeit auf Basis der Konstruktion von R über die CAUCHY-Folgen zu beweisen und äquivalente
HOCHSCHULE FÜR TECHNIK, WIRTSCHAFT UND KULTUR LEIPZIG University of Applied Sciences. Curve Matching. Leonie Bruckert
 HOCHSCHULE FÜR TECHNIK, WIRTSCHAFT UND KULTUR LEIPZIG Curve Matching www.htwk-leipzig.de Leonie Bruckert Leipzig, 24.06.2014 map matching: Anwendungsbeispiel Problem: Route eines Fahrzeugs im Straßennetz
HOCHSCHULE FÜR TECHNIK, WIRTSCHAFT UND KULTUR LEIPZIG Curve Matching www.htwk-leipzig.de Leonie Bruckert Leipzig, 24.06.2014 map matching: Anwendungsbeispiel Problem: Route eines Fahrzeugs im Straßennetz
Stetige Funktionen. Definition. Seien (X, d) und (Y, D) metrische Räume und f : X Y eine Abbildung. i) f heißt stetig in x 0 (x 0 D(f)), wenn
 und (Y, D) metrische Räume und f : X Y eine Abbildung. i) f heißt stetig in x 0 (x 0 D(f)), wenn") Stetige Funktionen Eine zentrale Rolle in der Analysis spielen Abbildungen f : X Y, wobei X und Y strukturierte Mengen sind (wie z.b. Vektorräume oder metrische Räume). Dabei sind i.a. nicht beliebige
Stetige Funktionen Eine zentrale Rolle in der Analysis spielen Abbildungen f : X Y, wobei X und Y strukturierte Mengen sind (wie z.b. Vektorräume oder metrische Räume). Dabei sind i.a. nicht beliebige
Seminar Gewöhnliche Differentialgleichungen
 Seminar Gewöhnliche Differentialgleichungen Dynamische Systeme I 1 Einleitung 1.1 Nichtlineare Systeme In den vorigen Vorträgen haben wir uns mit linearen Differentialgleichungen beschäftigt. Nun werden
Seminar Gewöhnliche Differentialgleichungen Dynamische Systeme I 1 Einleitung 1.1 Nichtlineare Systeme In den vorigen Vorträgen haben wir uns mit linearen Differentialgleichungen beschäftigt. Nun werden
Analysis I. Guofang Wang Universität Freiburg
 Universität Freiburg 30.11.2016 5. Teilmengen von R und von R n Der R n ist eine mathematische Verallgemeinerung: R n = {x = (x 1,..., x n ) : x i R} = } R. {{.. R }. n mal Für x R ist x der Abstand zum
Universität Freiburg 30.11.2016 5. Teilmengen von R und von R n Der R n ist eine mathematische Verallgemeinerung: R n = {x = (x 1,..., x n ) : x i R} = } R. {{.. R }. n mal Für x R ist x der Abstand zum
4 Kurven im R n. Sei I R ein beliebiges Intervall (offen, halboffen, abgeschlossen, beschränkt oder unbeschränkt), das mindestens einen Punkt enthält.
, das mindestens einen Punkt enthält.") 4 Kurven im R n Sei I R ein beliebiges Intervall (offen, halboffen, abgeschlossen, beschränkt oder unbeschränkt), das mindestens einen Punkt enthält. Definition 4.1. (a) Unter einer Kurve im R n versteht
4 Kurven im R n Sei I R ein beliebiges Intervall (offen, halboffen, abgeschlossen, beschränkt oder unbeschränkt), das mindestens einen Punkt enthält. Definition 4.1. (a) Unter einer Kurve im R n versteht
Geschwindigkeiten, Steigungen und Tangenten
 Geschwindigkeiten, Steigungen und Tangenten 1-E Die Geschwindigkeit cc Wir beginnen mit dem Problem der Geschwindigkeit: Wie können wir die Geschwindigkeit eines bewegten Objektes in einem bestimmten Augenblick
Geschwindigkeiten, Steigungen und Tangenten 1-E Die Geschwindigkeit cc Wir beginnen mit dem Problem der Geschwindigkeit: Wie können wir die Geschwindigkeit eines bewegten Objektes in einem bestimmten Augenblick
4.2 Grenzwerte und Stetigkeit reeller Funktionen
 4. Grenzwerte und Stetigkeit reeller Funktionen 73 4. Grenzwerte und Stetigkeit reeller Funktionen Definition 4.. Gegeben sei eine Funktion y = mit D(f). (i) Sei D(f). heißt stetig in, falls es für alle
4. Grenzwerte und Stetigkeit reeller Funktionen 73 4. Grenzwerte und Stetigkeit reeller Funktionen Definition 4.. Gegeben sei eine Funktion y = mit D(f). (i) Sei D(f). heißt stetig in, falls es für alle
Schnitte von Fraktalen
 Inhalt Eingliederung Vorwort matthias.schmid@uni-ulm.de 12. Dezember 2006 Inhalt Eingliederung Vorwort 1 Einleitung Inhalt Eingliederung Vorwort 2 Bewegung Isometrie Maße von Bewegungen 3 Satz 1 Bild eines
Inhalt Eingliederung Vorwort matthias.schmid@uni-ulm.de 12. Dezember 2006 Inhalt Eingliederung Vorwort 1 Einleitung Inhalt Eingliederung Vorwort 2 Bewegung Isometrie Maße von Bewegungen 3 Satz 1 Bild eines
Vorkurs Mathematik B
 Vorkurs Mathematik B Dr. Thorsten Camps Fakultät für Mathematik TU Dortmund 8. September 2011 Für die Mathematik zentral sind Abbildungen und Funktionen. Häufig wird zwischen beiden Begriffen nicht unterschieden.
Vorkurs Mathematik B Dr. Thorsten Camps Fakultät für Mathematik TU Dortmund 8. September 2011 Für die Mathematik zentral sind Abbildungen und Funktionen. Häufig wird zwischen beiden Begriffen nicht unterschieden.
4.4 Umkehrfunktion 77. Sei o.b.d.a. f(a) > 0 und f(b) < 0, setzen M = {y [a, b] mit f(x) > 0 für alle x [a, y]}
![4.4 Umkehrfunktion 77. Sei o.b.d.a. f(a) > 0 und f(b) < 0, setzen M = {y [a, b] mit f(x) > 0 für alle x [a, y]}](/thumbs/73/68945497.jpg "4.4 Umkehrfunktion 77. Sei o.b.d.a. f(a) > 0 und f(b) < 0, setzen M = {y [a, b] mit f(x) > 0 für alle x [a, y]}") . Umkehrfunktion 77 B e w e i s : Sei o.b.d.a. fa) > und fb) für alle [a, y] M a M), M beschränkt y b) Aiom V ξ [a, b] : ξ sup M fa) f) n.z.z. : i) fξ) ii) ξ a, b) zu i):
. Umkehrfunktion 77 B e w e i s : Sei o.b.d.a. fa) > und fb) für alle [a, y] M a M), M beschränkt y b) Aiom V ξ [a, b] : ξ sup M fa) f) n.z.z. : i) fξ) ii) ξ a, b) zu i):
13. Woche: NP-Vollständigkeit Satz von Cook-Levin Anwendungen in der Kryptographie
 13 Woche: NP-Vollständigkeit Satz von Cook-Levin Anwendungen in der Kryptographie 13 Woche: NP-Vollständigkeit, Satz von Cook-Levin, Anwendungen 276/ 333 N P-Vollständigkeit Ḋefinition NP-vollständig Sei
13 Woche: NP-Vollständigkeit Satz von Cook-Levin Anwendungen in der Kryptographie 13 Woche: NP-Vollständigkeit, Satz von Cook-Levin, Anwendungen 276/ 333 N P-Vollständigkeit Ḋefinition NP-vollständig Sei
Die Topologie von R, C und R n
 Die Topologie von R, C und R n Für R haben wir bereits eine Reihe von Strukturen kennengelernt: eine algebraische Struktur (Körper), eine Ordnungsstruktur und eine metrische Struktur (Absolutbetrag, Abstand).
Die Topologie von R, C und R n Für R haben wir bereits eine Reihe von Strukturen kennengelernt: eine algebraische Struktur (Körper), eine Ordnungsstruktur und eine metrische Struktur (Absolutbetrag, Abstand).
Algorithmen II Vorlesung am
 Algorithmen II Vorlesung am 17.01.013 Parametrisierte Algorithmen INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg und Algorithmen nationales
Algorithmen II Vorlesung am 17.01.013 Parametrisierte Algorithmen INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg und Algorithmen nationales
f(x nk ) = lim y nk ) = lim Bemerkung 2.14 Der Satz stimmt nicht mehr, wenn D nicht abgeschlossen oder nicht beschränkt ist, wie man z.b.
 = lim y nk ) = lim Bemerkung 2.14 Der Satz stimmt nicht mehr, wenn D nicht abgeschlossen oder nicht beschränkt ist, wie man z.b.") Proposition.13 Sei f : D R stetig und D = [a, b] R. Dann ist f(d) beschränkt. Außerdem nimmt f sein Maximum und Minimum auf D an, d.h. es gibt x max D und ein x min D, so dass f(x max ) = sup f(d) und
Proposition.13 Sei f : D R stetig und D = [a, b] R. Dann ist f(d) beschränkt. Außerdem nimmt f sein Maximum und Minimum auf D an, d.h. es gibt x max D und ein x min D, so dass f(x max ) = sup f(d) und
5. Clusteranalyse. Lernziele: Grundlegende Algorithmen der Clusteranalyse kennen, ihre Eigenschaften
 5. Clusteranalyse Lernziele: Grundlegende Algorithmen der Clusteranalyse kennen, ihre Eigenschaften benennen und anwenden können, einen Test auf das Vorhandensein einer Clusterstruktur kennen, verschiedene
5. Clusteranalyse Lernziele: Grundlegende Algorithmen der Clusteranalyse kennen, ihre Eigenschaften benennen und anwenden können, einen Test auf das Vorhandensein einer Clusterstruktur kennen, verschiedene
Lineare Gleichungssysteme
 Kapitel 6 Lineare Gleichungssysteme 6. Gaußalgorithmus Aufgabe 6. : Untersuchen Sie die folgenden linearen Gleichungssysteme mit dem Gaußalgorithmus auf Lösbarkeit und bestimmen Sie jeweils die Lösungsmenge.
Kapitel 6 Lineare Gleichungssysteme 6. Gaußalgorithmus Aufgabe 6. : Untersuchen Sie die folgenden linearen Gleichungssysteme mit dem Gaußalgorithmus auf Lösbarkeit und bestimmen Sie jeweils die Lösungsmenge.
Monotone Funktionen. Definition Es sei D R. Eine Funktion f : D R heißt. (ii) monoton fallend, wenn für alle x, x D gilt. x < x f (x) f (x ).
 monoton fallend, wenn für alle x, x D gilt. x < x f (x) f (x ).") Monotone Funktionen Definition 4.36 Es sei D R. Eine Funktion f : D R heißt (i) monoton wachsend, wenn für alle x, x D gilt x < x f (x) f (x ). Wenn sogar die strikte Ungleichung f (x) < f (x ) folgt,
Monotone Funktionen Definition 4.36 Es sei D R. Eine Funktion f : D R heißt (i) monoton wachsend, wenn für alle x, x D gilt x < x f (x) f (x ). Wenn sogar die strikte Ungleichung f (x) < f (x ) folgt,
Voronoi-Diagramme. Dr. Martin Nöllenburg Vorlesung Algorithmische Geometrie INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK
 Vorlesung Algorithmische Geometrie INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 29.05.2011 Das Postamt-Problem b(p, q) = {x R 2 : xp = xq } p q h(p, q) h(q, p) = {x :
Vorlesung Algorithmische Geometrie INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 29.05.2011 Das Postamt-Problem b(p, q) = {x R 2 : xp = xq } p q h(p, q) h(q, p) = {x :
Übungsblatt 2 - Analysis 2, Prof. G. Hemion
 Tutor: Martin Friesen, martin.friesen@gmx.de Übungsblatt 2 - Analysis 2, Prof. G. Hemion Um die hier gestellten Aufgaben zu lösen brauchen wir ein wenig Kentnisse über das Infimum bzw. Supremum einer Menge.
Tutor: Martin Friesen, martin.friesen@gmx.de Übungsblatt 2 - Analysis 2, Prof. G. Hemion Um die hier gestellten Aufgaben zu lösen brauchen wir ein wenig Kentnisse über das Infimum bzw. Supremum einer Menge.
5. Clusteranalyse Vorbemerkungen. 5. Clusteranalyse. Grundlegende Algorithmen der Clusteranalyse kennen, ihre Eigenschaften
 5. Clusteranalyse Vorbemerkungen 5. Clusteranalyse Lernziele: Grundlegende Algorithmen der Clusteranalyse kennen, ihre Eigenschaften benennen und anwenden können, einen Test auf das Vorhandensein einer
5. Clusteranalyse Vorbemerkungen 5. Clusteranalyse Lernziele: Grundlegende Algorithmen der Clusteranalyse kennen, ihre Eigenschaften benennen und anwenden können, einen Test auf das Vorhandensein einer
Extremalpunkte und der Satz von Krein-Milman. 1 Lokalkonvexe topologische Vektorräume
 Extremalpunkte und der Satz von Krein-Milman Seminar zu ausgewählten Kapiteln der Banachraumtheorie Vortrag von Michael Hoffmann 1 Lokalkonvexe topologische Vektorräume Im folgenden betrachten wir stets
Extremalpunkte und der Satz von Krein-Milman Seminar zu ausgewählten Kapiteln der Banachraumtheorie Vortrag von Michael Hoffmann 1 Lokalkonvexe topologische Vektorräume Im folgenden betrachten wir stets
Analysis II. Vorlesung 47
 Prof. Dr. H. Brenner Osnabrück SS 2014 Analysis II Zu einer reellwertigen Funktion Vorlesung 47 interessieren wir uns wie schon bei einem eindimensionalen Definitionsbereich für die Extrema, also Maxima
Prof. Dr. H. Brenner Osnabrück SS 2014 Analysis II Zu einer reellwertigen Funktion Vorlesung 47 interessieren wir uns wie schon bei einem eindimensionalen Definitionsbereich für die Extrema, also Maxima
D-MAVT/D-MATL Analysis I HS 2017 Dr. Andreas Steiger. Lösung - Serie 6. (n+1)!. Daraus folgt, dass e 1/x < (n+
!. Daraus folgt, dass e 1/x < (n+") D-MAVT/D-MATL Analysis I HS 2017 Dr. Andreas Steiger Lösung - Serie 6 1. MC-Aufgaben (Online-Abgabe) 1. Für alle ganzen Zahlen n 1 gilt... (a) e 1/x = o(x n ) für x 0 + (b) e 1/x = o(x n ) für x 0 + (c)
D-MAVT/D-MATL Analysis I HS 2017 Dr. Andreas Steiger Lösung - Serie 6 1. MC-Aufgaben (Online-Abgabe) 1. Für alle ganzen Zahlen n 1 gilt... (a) e 1/x = o(x n ) für x 0 + (b) e 1/x = o(x n ) für x 0 + (c)
ε δ Definition der Stetigkeit.
 ε δ Definition der Stetigkeit. Beweis a) b): Annahme: ε > 0 : δ > 0 : x δ D : x δ x 0 < δ f (x δ f (x 0 ) ε Die Wahl δ = 1 n (n N) generiert eine Folge (x n) n N, x n D mit x n x 0 < 1 n f (x n ) f (x
ε δ Definition der Stetigkeit. Beweis a) b): Annahme: ε > 0 : δ > 0 : x δ D : x δ x 0 < δ f (x δ f (x 0 ) ε Die Wahl δ = 1 n (n N) generiert eine Folge (x n) n N, x n D mit x n x 0 < 1 n f (x n ) f (x
Mathematik I für Studierende der Geophysik/Ozeanographie, Meteorologie und Physik Vorlesungsskript
 Mathematik I für Studierende der Geophysik/Ozeanographie, Meteorologie und Physik Vorlesungsskript Janko Latschev Fachbereich Mathematik Universität Hamburg www.math.uni-hamburg.de/home/latschev Hamburg,
Mathematik I für Studierende der Geophysik/Ozeanographie, Meteorologie und Physik Vorlesungsskript Janko Latschev Fachbereich Mathematik Universität Hamburg www.math.uni-hamburg.de/home/latschev Hamburg,
Topologische Grundbegriffe I. 1 Offene und Abgeschlossene Mengen
 Topologische Grundbegriffe I Vortrag zum Proseminar Analysis, 26.04.2010 Nina Neidhardt und Simon Langer Im Folgenden soll gezeigt werden, dass topologische Konzepte, die uns schon für die Reellen Zahlen
Topologische Grundbegriffe I Vortrag zum Proseminar Analysis, 26.04.2010 Nina Neidhardt und Simon Langer Im Folgenden soll gezeigt werden, dass topologische Konzepte, die uns schon für die Reellen Zahlen
1 Definition und Konstruktion vektorwertiger Funktionen und Funktionen mehrerer Variabler
 Zusammenfassung Kapitel IV: Funktionen mehrerer Veränderlicher und vektorwertige Funktionen 1 Definition und Konstruktion vektorwertiger Funktionen und Funktionen mehrerer Variabler Definition vektorwertige
Zusammenfassung Kapitel IV: Funktionen mehrerer Veränderlicher und vektorwertige Funktionen 1 Definition und Konstruktion vektorwertiger Funktionen und Funktionen mehrerer Variabler Definition vektorwertige
Spline-Interpolation
 Spline-Interpolation Tim Schmölzer 20 November 2009 Tim Schmölzer Spline-Interpolation 20 November 2009 1 / 38 Übersicht 1 Vorbemerkungen 2 Lösbarkeit des Interpolationsproblems 3 Stabilität der Interpolation
Spline-Interpolation Tim Schmölzer 20 November 2009 Tim Schmölzer Spline-Interpolation 20 November 2009 1 / 38 Übersicht 1 Vorbemerkungen 2 Lösbarkeit des Interpolationsproblems 3 Stabilität der Interpolation
d(x, z) = z x = y x + z y y x + z y = d(x, y) + d(y, z). d(x, y) = 0, falls x = y.
 = z x = y x + z y y x + z y = d(x, y) + d(y, z). d(x, y) = 0, falls x = y.") Metrische Räume K bezeichnet entweder den Körper R oder den Körper C. Genauer bedeutet dies: K wird in denjenigen Situationen verwendet, in denen die Ersetzung von K sowohl durch R als auch durch C einen
Metrische Räume K bezeichnet entweder den Körper R oder den Körper C. Genauer bedeutet dies: K wird in denjenigen Situationen verwendet, in denen die Ersetzung von K sowohl durch R als auch durch C einen
Grundlagen der Theoretischen Informatik
 Grundlagen der Theoretischen Informatik 4. Kellerautomaten und kontextfreie Sprachen (III) 17.06.2015 Viorica Sofronie-Stokkermans e-mail: sofronie@uni-koblenz.de 1 Übersicht 1. Motivation 2. Terminologie
Grundlagen der Theoretischen Informatik 4. Kellerautomaten und kontextfreie Sprachen (III) 17.06.2015 Viorica Sofronie-Stokkermans e-mail: sofronie@uni-koblenz.de 1 Übersicht 1. Motivation 2. Terminologie
Rudolf Brinkmann Seite und W = {x 3 x 6}
 Rudolf Brinkmann Seite 0.0.008 Lineare Funktionen Es soll der Graph der Funktion f = {,y y = f() = } in den Bereichen D { } = und W = { 6} - - 0 f() = -6-0 6 9 erstellt werden. 6 6 5 0 Definition Eine
Rudolf Brinkmann Seite 0.0.008 Lineare Funktionen Es soll der Graph der Funktion f = {,y y = f() = } in den Bereichen D { } = und W = { 6} - - 0 f() = -6-0 6 9 erstellt werden. 6 6 5 0 Definition Eine
Cauchy-Folgen und Kompaktheit. 1 Cauchy-Folgen und Beschränktheit
 Vortrag zum Seminar zur Analysis, 10.05.2010 Michael Engeländer, Jonathan Fell Dieser Vortrag stellt als erstes einige Sätze zu Cauchy-Folgen auf allgemeinen metrischen Räumen vor. Speziell wird auch das
Vortrag zum Seminar zur Analysis, 10.05.2010 Michael Engeländer, Jonathan Fell Dieser Vortrag stellt als erstes einige Sätze zu Cauchy-Folgen auf allgemeinen metrischen Räumen vor. Speziell wird auch das
Das Gradientenverfahren
 Das Gradientenverfahren - Proseminar: Algorithmen der Nichtlinearen Optimierung - David Beisel December 10, 2012 David Beisel Das Gradientenverfahren December 10, 2012 1 / 28 Gliederung 0 Einführung 1
Das Gradientenverfahren - Proseminar: Algorithmen der Nichtlinearen Optimierung - David Beisel December 10, 2012 David Beisel Das Gradientenverfahren December 10, 2012 1 / 28 Gliederung 0 Einführung 1
2015, MNZ. Jürgen Schmidt. Vorkurs. Mathematik. Ableiten. Tag WS 2015/16
 Vorkurs 4. Mathematik Ableiten WS 2015/16 Tag Einführendes Beispiel Vernachlässigen wir den Luftwiderstand, so können wir in hinreichender Näherung für den freien Fall eines Körpers s(t) = 5t 2 als Weg-Zeit-Abhängigkeit
Vorkurs 4. Mathematik Ableiten WS 2015/16 Tag Einführendes Beispiel Vernachlässigen wir den Luftwiderstand, so können wir in hinreichender Näherung für den freien Fall eines Körpers s(t) = 5t 2 als Weg-Zeit-Abhängigkeit
16. Differentialquotient, Mittelwertsatz
 16. Differentialquotient, Mittelwertsatz Gegeben sei eine stetige Funktion f : R R. Wir suchen die Gleichung der Tangente t an die Kurve y = f(x) im Punkt (x, f(x ), x R. Das Problem dabei ist, dass vorderhand
16. Differentialquotient, Mittelwertsatz Gegeben sei eine stetige Funktion f : R R. Wir suchen die Gleichung der Tangente t an die Kurve y = f(x) im Punkt (x, f(x ), x R. Das Problem dabei ist, dass vorderhand
Differentialgeometrie II (Flächentheorie) WS
 WS") Differentialgeometrie II (Flächentheorie) WS 2013-2014 Lektion 9 18. Dezember 2013 c Daria Apushkinskaya 2013 () Flächentheorie: Lektion 9 18. Dezember 2013 1 / 17 9. Einführung in der innere Geometrie
Differentialgeometrie II (Flächentheorie) WS 2013-2014 Lektion 9 18. Dezember 2013 c Daria Apushkinskaya 2013 () Flächentheorie: Lektion 9 18. Dezember 2013 1 / 17 9. Einführung in der innere Geometrie
Lineare Algebra I, Musterlösung zu Blatt 9
 Lineare Algebra I, Musterlösung zu Blatt 9 Wintersemester 2007/08 1. Untersuchen Sie, ob die folgenden Matrizen invertierbar sind und bestimmen Sie gegebenenfalls die Inverse. 8 1 3 1 a) A = 3 3 1 1 11
Lineare Algebra I, Musterlösung zu Blatt 9 Wintersemester 2007/08 1. Untersuchen Sie, ob die folgenden Matrizen invertierbar sind und bestimmen Sie gegebenenfalls die Inverse. 8 1 3 1 a) A = 3 3 1 1 11
4.1 Grundlegende Konstruktionen Stetigkeit von Funktionen Eigenschaften stetiger Funktionen... 91
 Kapitel 4 Funktionen und Stetigkeit In diesem Kapitel beginnen wir Funktionen f : R R systematisch zu untersuchen. Dazu bauen wir auf den Begriff des metrischen Raumes auf und erhalten offene und abgeschlossene
Kapitel 4 Funktionen und Stetigkeit In diesem Kapitel beginnen wir Funktionen f : R R systematisch zu untersuchen. Dazu bauen wir auf den Begriff des metrischen Raumes auf und erhalten offene und abgeschlossene
Mathematik für Ökonomen 1
 Mathematik für Ökonomen 1 Dr. Thomas Zehrt Wirtschaftswissenschaftliches Zentrum Universität Basel Herbstemester 2008 Mengen, Funktionen und Logik Inhalt: 1. Mengen 2. Funktionen 3. Logik Teil 1 Mengen
Mathematik für Ökonomen 1 Dr. Thomas Zehrt Wirtschaftswissenschaftliches Zentrum Universität Basel Herbstemester 2008 Mengen, Funktionen und Logik Inhalt: 1. Mengen 2. Funktionen 3. Logik Teil 1 Mengen
Theoretische Informatik. Exkurs: Komplexität von Optimierungsproblemen. Optimierungsprobleme. Optimierungsprobleme. Exkurs Optimierungsprobleme
 Theoretische Informatik Exkurs Rainer Schrader Exkurs: Komplexität von n Institut für Informatik 13. Mai 2009 1 / 34 2 / 34 Gliederung Entscheidungs- und Approximationen und Gütegarantien zwei Greedy-Strategien
Theoretische Informatik Exkurs Rainer Schrader Exkurs: Komplexität von n Institut für Informatik 13. Mai 2009 1 / 34 2 / 34 Gliederung Entscheidungs- und Approximationen und Gütegarantien zwei Greedy-Strategien
Lösungen zur Klausur zur Analysis 1, WiSe 2016/17
 BERGISCHE UNIVERSITÄT WUPPERTAL..7 Fakultät 4 - Mathematik und Naturwissenschaften Prof. N. V. Shcherbina Dr. T. P. Pawlaschyk www.kana.uni-wuppertal.de Lösungen zur Klausur zur Analysis, WiSe 6/7 Klausureinsicht:
BERGISCHE UNIVERSITÄT WUPPERTAL..7 Fakultät 4 - Mathematik und Naturwissenschaften Prof. N. V. Shcherbina Dr. T. P. Pawlaschyk www.kana.uni-wuppertal.de Lösungen zur Klausur zur Analysis, WiSe 6/7 Klausureinsicht:
19 Körperhomomorphismen
 19 Körperhomomorphismen Definition und Bemerkung 19.1. (i) Seien K, L Körper. Ein Ringhomomorphismus σ : K L heißt Körperhomomorphismus. Die Menge der Körperhomomorphismen K L bezeichnen wir mit Hom(K,
19 Körperhomomorphismen Definition und Bemerkung 19.1. (i) Seien K, L Körper. Ein Ringhomomorphismus σ : K L heißt Körperhomomorphismus. Die Menge der Körperhomomorphismen K L bezeichnen wir mit Hom(K,
Vorlesung Datenstrukturen
 Vorlesung Datenstrukturen Kürzeste Wege Maike Buchin 4. und 6.7.2017 Einführung Motivation: Bestimmung von kürzesten Wegen ist in vielen Anwendungen, z.b. Routenplanung, ein wichtiges Problem. Allgemeine
Vorlesung Datenstrukturen Kürzeste Wege Maike Buchin 4. und 6.7.2017 Einführung Motivation: Bestimmung von kürzesten Wegen ist in vielen Anwendungen, z.b. Routenplanung, ein wichtiges Problem. Allgemeine
Grenzwert. 1-E Ma 1 Lubov Vassilevskaya
 Grenzwert Ohne Grenzwerte gibt es keine Differential- und Integralrechnung. Jeder einzelne Ausdruck in der Differential- und Integralrechnung ist in irgendeinem Sinn ein Grenzwert. 1-E Die Idee des Grenzwertes
Grenzwert Ohne Grenzwerte gibt es keine Differential- und Integralrechnung. Jeder einzelne Ausdruck in der Differential- und Integralrechnung ist in irgendeinem Sinn ein Grenzwert. 1-E Die Idee des Grenzwertes
Der Satz vom Diktator
 Prof. Dr. Michael Eisermann Institut für Geometrie und Topologie Der Satz vom Diktator Kenneth Arrows geniale Antwort auf die Frage Wie schreibe ich meine Doktorarbeit in fünf Tagen und erhalte dafür den
Prof. Dr. Michael Eisermann Institut für Geometrie und Topologie Der Satz vom Diktator Kenneth Arrows geniale Antwort auf die Frage Wie schreibe ich meine Doktorarbeit in fünf Tagen und erhalte dafür den
Theorie der Informatik
 Theorie der Informatik 8. Reguläre Sprachen II Malte Helmert Gabriele Röger Universität Basel 24. März 24 Pumping Lemma Pumping Lemma: Motivation Man kann zeigen, dass eine Sprache regulär ist, indem man
Theorie der Informatik 8. Reguläre Sprachen II Malte Helmert Gabriele Röger Universität Basel 24. März 24 Pumping Lemma Pumping Lemma: Motivation Man kann zeigen, dass eine Sprache regulär ist, indem man
Mathematik für Wirtschaftswissenschaftler
 Mathematik für Wirtschaftswissenschaftler Yves Schneider Universität Luzern Frühjahr 2016 Repetition Kapitel 1 bis 3 2 / 54 Repetition Kapitel 1 bis 3 Ausgewählte Themen Kapitel 1 Ausgewählte Themen Kapitel
Mathematik für Wirtschaftswissenschaftler Yves Schneider Universität Luzern Frühjahr 2016 Repetition Kapitel 1 bis 3 2 / 54 Repetition Kapitel 1 bis 3 Ausgewählte Themen Kapitel 1 Ausgewählte Themen Kapitel
differenzierbare Funktionen
 Kapitel IV Differenzierbare Funktionen 18 Differenzierbarkeit und Rechenregeln für differenzierbare Funktionen 19 Mittelwertsätze der Differentialrechnung mit Anwendungen 20 Gleichmäßige Konvergenz von
Kapitel IV Differenzierbare Funktionen 18 Differenzierbarkeit und Rechenregeln für differenzierbare Funktionen 19 Mittelwertsätze der Differentialrechnung mit Anwendungen 20 Gleichmäßige Konvergenz von
12 Gewöhnliche Differentialgleichungen
 2 2 Gewöhnliche Differentialgleichungen 2. Einleitung Sei f : D R wobei D R 2. Dann nennt man y = f(x, y) (5) eine (gewöhnliche) Differentialgleichung (DGL) erster Ordnung. Als Lösung von (5) akzeptiert
2 2 Gewöhnliche Differentialgleichungen 2. Einleitung Sei f : D R wobei D R 2. Dann nennt man y = f(x, y) (5) eine (gewöhnliche) Differentialgleichung (DGL) erster Ordnung. Als Lösung von (5) akzeptiert
11 Untermannigfaltigkeiten des R n und lokale Extrema mit Nebenbedingungen
 11 Untermannigfaltigkeiten des R n und lokale Extrema mit Nebenbedingungen Ziel: Wir wollen lokale Extrema von Funktionen f : M R untersuchen, wobei M R n eine k-dimensionale Untermannigfaltigkeit des
11 Untermannigfaltigkeiten des R n und lokale Extrema mit Nebenbedingungen Ziel: Wir wollen lokale Extrema von Funktionen f : M R untersuchen, wobei M R n eine k-dimensionale Untermannigfaltigkeit des
19.2 Mittelwertsatz der Differentialrechnung
 19 Mittelwertsätze der Differentialrechnung mit Anwendungen 19.1 Satz von Rolle 19.2 Mittelwertsatz der Differentialrechnung 19.4 Globaler Wachstumssatz 19.6 Verallgemeinerter Mittelwertsatz der Differentialrechnung
19 Mittelwertsätze der Differentialrechnung mit Anwendungen 19.1 Satz von Rolle 19.2 Mittelwertsatz der Differentialrechnung 19.4 Globaler Wachstumssatz 19.6 Verallgemeinerter Mittelwertsatz der Differentialrechnung
Mathematik für Physiker, Informatiker und Ingenieure
 Mathematik für Physiker, Informatiker und Ingenieure Folien zu Kapitel IV SS 2010 G. Dirr INSTITUT FÜR MATHEMATIK UNIVERSITÄT WÜRZBURG dirr@mathematik.uni-wuerzburg.de http://www2.mathematik.uni-wuerzburg.de
Mathematik für Physiker, Informatiker und Ingenieure Folien zu Kapitel IV SS 2010 G. Dirr INSTITUT FÜR MATHEMATIK UNIVERSITÄT WÜRZBURG dirr@mathematik.uni-wuerzburg.de http://www2.mathematik.uni-wuerzburg.de
Graphenalgorithmen und lineare Algebra Hand in Hand Prof. Dr. Henning Meyerhenke
 Graphenalgorithmen und lineare Algebra Hand in Hand Prof. Dr. Henning Meyerhenke Institut für Theoretische Informatik 1 KIT Henning Universität desmeyerhenke, Landes Baden-Württemberg Institutund für Theoretische
Graphenalgorithmen und lineare Algebra Hand in Hand Prof. Dr. Henning Meyerhenke Institut für Theoretische Informatik 1 KIT Henning Universität desmeyerhenke, Landes Baden-Württemberg Institutund für Theoretische
Mehrfachintegrale 1-E1. Ma 2 Lubov Vassilevskaya
 Mehrfachintegrale 1-E1 1-E2 Mehrfachintegrale c Die Erweiterung des Integralbegriffs führt zu den Mehrfachintegralen, die in den naturwissenschaftlich-technischen Anwendungen u.a. bei der Berechnung der
Mehrfachintegrale 1-E1 1-E2 Mehrfachintegrale c Die Erweiterung des Integralbegriffs führt zu den Mehrfachintegralen, die in den naturwissenschaftlich-technischen Anwendungen u.a. bei der Berechnung der
Lösung zur Übung für Analysis einer Variablen WS 2016/17
 Blatt Nr. 3 Prof. F. Merkl Lösung zur Übung für Analysis einer Variablen WS 206/7 Aufgabe Das Guthaben G setzt sich zusammen aus der Summe aller bisherigen Einzahlungen multipliziert mit ( + p) k, wobei
Blatt Nr. 3 Prof. F. Merkl Lösung zur Übung für Analysis einer Variablen WS 206/7 Aufgabe Das Guthaben G setzt sich zusammen aus der Summe aller bisherigen Einzahlungen multipliziert mit ( + p) k, wobei
Analysis 2, Woche 9. Mehrdimensionale Differentialrechnung I. 9.1 Differenzierbarkeit
 A Analysis, Woche 9 Mehrdimensionale Differentialrechnung I A 9. Differenzierbarkeit A3 =. (9.) Definition 9. Sei U R m offen, f : U R n eine Funktion und a R m. Die Funktion f heißt differenzierbar in
A Analysis, Woche 9 Mehrdimensionale Differentialrechnung I A 9. Differenzierbarkeit A3 =. (9.) Definition 9. Sei U R m offen, f : U R n eine Funktion und a R m. Die Funktion f heißt differenzierbar in
Analysis I - Stetige Funktionen
 Kompaktheit und January 13, 2009 Kompaktheit und Funktionengrenzwert Definition Seien X, d X ) und Y, d Y ) metrische Räume. Desweiteren seien E eine Teilmenge von X, f : E Y eine Funktion und p ein Häufungspunkt
Kompaktheit und January 13, 2009 Kompaktheit und Funktionengrenzwert Definition Seien X, d X ) und Y, d Y ) metrische Räume. Desweiteren seien E eine Teilmenge von X, f : E Y eine Funktion und p ein Häufungspunkt
Reguläre Sprachen. R. Stiebe: Theoretische Informatik für ING-IF und Lehrer,
 Reguläre Sprachen Reguläre Sprachen (Typ-3-Sprachen) haben große Bedeutung in Textverarbeitung und Programmierung (z.b. lexikalische Analyse) besitzen für viele Entscheidungsprobleme effiziente Algorithmen
Reguläre Sprachen Reguläre Sprachen (Typ-3-Sprachen) haben große Bedeutung in Textverarbeitung und Programmierung (z.b. lexikalische Analyse) besitzen für viele Entscheidungsprobleme effiziente Algorithmen
10 Aus der Analysis. Themen: Konvergenz von Zahlenfolgen Unendliche Reihen Stetigkeit Differenzierbarkeit
 10 Aus der Analysis Themen: Konvergenz von Zahlenfolgen Unendliche Reihen Stetigkeit Differenzierbarkeit Zahlenfolgen Ein unendliche Folge reeller Zahlen heißt Zahlenfolge. Im Beispiel 2, 3, 2, 2 2, 2
10 Aus der Analysis Themen: Konvergenz von Zahlenfolgen Unendliche Reihen Stetigkeit Differenzierbarkeit Zahlenfolgen Ein unendliche Folge reeller Zahlen heißt Zahlenfolge. Im Beispiel 2, 3, 2, 2 2, 2
Funktionen. x : Variable von f oder Argument f x : Funktionswert, Wert der Funktion f an der Stelle x D f. : Definitionsmenge(Urbildmenge)
") Funktionen Eine Funktion oder Abbildung ist eine Beziehung zwischen zwei nicht leere Mengen D f und Z, die jedem Element x aus einer Menge D f genau ein Element y aus anderer Menge Z zuordnet. f : D f
Funktionen Eine Funktion oder Abbildung ist eine Beziehung zwischen zwei nicht leere Mengen D f und Z, die jedem Element x aus einer Menge D f genau ein Element y aus anderer Menge Z zuordnet. f : D f
Parallele Algorithmen in der Bildverarbeitung
 Seminar über Algorithmen - SoSe 2009 Parallele Algorithmen in der Bildverarbeitung von Christopher Keiner 1 Allgemeines 1.1 Einleitung Parallele Algorithmen gewinnen immer stärker an Bedeutung. Es existieren
Seminar über Algorithmen - SoSe 2009 Parallele Algorithmen in der Bildverarbeitung von Christopher Keiner 1 Allgemeines 1.1 Einleitung Parallele Algorithmen gewinnen immer stärker an Bedeutung. Es existieren
Mengen, Funktionen und Logik
 Wirtschaftswissenschaftliches Zentrum Universität Basel Mathematik für Ökonomen 1 Dr. Thomas Zehrt Mengen, Funktionen und Logik Literatur Referenz: Gauglhofer, M. und Müller, H.: Mathematik für Ökonomen,
Wirtschaftswissenschaftliches Zentrum Universität Basel Mathematik für Ökonomen 1 Dr. Thomas Zehrt Mengen, Funktionen und Logik Literatur Referenz: Gauglhofer, M. und Müller, H.: Mathematik für Ökonomen,
Analysis I. Vorlesung 12. Stetige Funktionen. Den Abstand zwischen zwei reellen (oder komplexen) Zahlen x und x bezeichnen
 Zahlen x und x bezeichnen") Prof. Dr. H. Brenner Osnabrück WS 2013/2014 Analysis I Vorlesung 12 Stetige Funktionen Den Abstand zwischen zwei reellen (oder komplexen) Zahlen x und x bezeichnen wir mit d(x,x ) := x x. Bei einer Funktion
Prof. Dr. H. Brenner Osnabrück WS 2013/2014 Analysis I Vorlesung 12 Stetige Funktionen Den Abstand zwischen zwei reellen (oder komplexen) Zahlen x und x bezeichnen wir mit d(x,x ) := x x. Bei einer Funktion
a 0, a 1, a 2, a 3,... Dabei stehen die drei Pünktchen für unendlich oft so weiter.
 7 Folgen 30 7 Folgen Wir betrachten nun (unendliche) Folgen von Zahlen a 0, a, a 2, a 3,.... Dabei stehen die drei Pünktchen für unendlich oft so weiter. Bezeichnung Wir bezeichnen mit N die Menge der
7 Folgen 30 7 Folgen Wir betrachten nun (unendliche) Folgen von Zahlen a 0, a, a 2, a 3,.... Dabei stehen die drei Pünktchen für unendlich oft so weiter. Bezeichnung Wir bezeichnen mit N die Menge der
Repetitorium Mathe 1
 Übungsaufgaben Skript Repetitorium Mathe 1 WS 2014/15 25./26.01. und 31.01./01.02.2015 Inhaltsverzeichnis 1 Bruchrechnung 2 2 Zahlsysteme 2 3 Arithmetisches und geometrisches Mittel 2 4 Wachstum 2 5 Lineare
Übungsaufgaben Skript Repetitorium Mathe 1 WS 2014/15 25./26.01. und 31.01./01.02.2015 Inhaltsverzeichnis 1 Bruchrechnung 2 2 Zahlsysteme 2 3 Arithmetisches und geometrisches Mittel 2 4 Wachstum 2 5 Lineare
x= f(x) p= U (x). (b) Zeigen Sie, dass auf jeder auf einem Intervall existierenden Lösung t x(t) die Energie E(t) := 1 2 p(t)2 + U(x(t)) x 1
 p= U (x). (b) Zeigen Sie, dass auf jeder auf einem Intervall existierenden Lösung t x(t) die Energie E(t) := 1 2 p(t)2 + U(x(t)) x 1") Blatt 1 03042006 H-Ch Grunau Aufgabe 1 Betrachten Sie die Differentialgleichung x= f(x) mit f = U und U C 2 ((α, β), R) und schreiben Sie diese in der Form x= p, p= U (x) (a) Skizzieren Sie die Phasenportraits
Blatt 1 03042006 H-Ch Grunau Aufgabe 1 Betrachten Sie die Differentialgleichung x= f(x) mit f = U und U C 2 ((α, β), R) und schreiben Sie diese in der Form x= p, p= U (x) (a) Skizzieren Sie die Phasenportraits
Nash-Gleichgewichte in 2-Spieler Systemen. Katharina Klost Freie Universität Berlin
 Nash-Gleichgewichte in 2-Spieler Systemen Katharina Klost Freie Universität Berlin Seminar über Algorithmen, 29.10.2013 Grundlegende Definitionen A Gewinnmatrix für Spieler 1, B Gewinnmatrix für Spieler
Nash-Gleichgewichte in 2-Spieler Systemen Katharina Klost Freie Universität Berlin Seminar über Algorithmen, 29.10.2013 Grundlegende Definitionen A Gewinnmatrix für Spieler 1, B Gewinnmatrix für Spieler
4 Differenzierbarkeit einer konjugierten Funktion
 4 Differenzierbarkeit einer konjugierten Funktion (Eingereicht von Corinna Vits) 4.1 Differenzierbarkeit 1.Ordnung Theorem 4.1.1: Sei f ConvR n strikt konvex. Dann ist int dom und f ist stetig differenzierbar
4 Differenzierbarkeit einer konjugierten Funktion (Eingereicht von Corinna Vits) 4.1 Differenzierbarkeit 1.Ordnung Theorem 4.1.1: Sei f ConvR n strikt konvex. Dann ist int dom und f ist stetig differenzierbar
D-MATH, D-PHYS, D-CHAB Analysis I HS 2017 Prof. Manfred Einsiedler. Lösung 4
 D-MATH, D-PHYS, D-CHAB Analysis I HS 017 Prof. Manfred Einsiedler Lösung 4 Hinweise 1. Zeigen Sie, dass inf X die kleinste obere Schranke von X ist.. Dass z 1, z Lösungen sind, kann man durch Einsetzen
D-MATH, D-PHYS, D-CHAB Analysis I HS 017 Prof. Manfred Einsiedler Lösung 4 Hinweise 1. Zeigen Sie, dass inf X die kleinste obere Schranke von X ist.. Dass z 1, z Lösungen sind, kann man durch Einsetzen
Grundlagen der Theoretischen Informatik
 Grundlagen der Theoretischen Informatik Sommersemester 2015 29.04.2015 Viorica Sofronie-Stokkermans e-mail: sofronie@uni-koblenz.de 1 Bis jetzt 1. Motivation 2. Terminologie 3. Endliche Automaten und reguläre
Grundlagen der Theoretischen Informatik Sommersemester 2015 29.04.2015 Viorica Sofronie-Stokkermans e-mail: sofronie@uni-koblenz.de 1 Bis jetzt 1. Motivation 2. Terminologie 3. Endliche Automaten und reguläre
Kommutativität. De Morgansche Regeln
 1. Formale Logik Proposition 1.1. Die logischen Elementarverknüpfungen gehorchen folgenden Äquivalenzen: (1.1) (1.2) p p p p p p Idempotenz (1.3) (1.4) p q q p p q q p Kommutativität (1.5) (1.6) (p q)
1. Formale Logik Proposition 1.1. Die logischen Elementarverknüpfungen gehorchen folgenden Äquivalenzen: (1.1) (1.2) p p p p p p Idempotenz (1.3) (1.4) p q q p p q q p Kommutativität (1.5) (1.6) (p q)
q 0 q gdw. nicht (q A) (q A) q i+1 q gdw. q i q oder ( a Σ) δ(q, a) i δ(q, a) L = {a n b n : n N} für a, b Σ, a b
 (q A) q i+1 q gdw. q i q oder ( a Σ) δ(q, a) i δ(q, a) L = {a n b n : n N} für a, b Σ, a b") Kap. 2: Endliche Automaten Myhill Nerode 2.4 Minimalautomat für reguläre Sprache Abschnitt 2.4.3 L Σ regulär der Äuivalenzklassen-Automat zu L ist ein DFA mit minimaler Zustandszahl (= index( L )) unter
Kap. 2: Endliche Automaten Myhill Nerode 2.4 Minimalautomat für reguläre Sprache Abschnitt 2.4.3 L Σ regulär der Äuivalenzklassen-Automat zu L ist ein DFA mit minimaler Zustandszahl (= index( L )) unter
3.3 Optimale binäre Suchbäume
 3.3 Optimale binäre Suchbäume Problem 3.3.1. Sei S eine Menge von Schlüsseln aus einem endlichen, linear geordneten Universum U, S = {a 1,,...,a n } U und S = n N. Wir wollen S in einem binären Suchbaum
3.3 Optimale binäre Suchbäume Problem 3.3.1. Sei S eine Menge von Schlüsseln aus einem endlichen, linear geordneten Universum U, S = {a 1,,...,a n } U und S = n N. Wir wollen S in einem binären Suchbaum
Anwendungen der Differentialrechnung
 KAPITEL 7 Anwendungen der Differentialrechnung 7.1 Maxima und Minima einer Funktion................. 141 7.2 Mittelwertsatz............................ 144 7.3 Kurvendiskussion..........................
KAPITEL 7 Anwendungen der Differentialrechnung 7.1 Maxima und Minima einer Funktion................. 141 7.2 Mittelwertsatz............................ 144 7.3 Kurvendiskussion..........................
Erste und zweite Variation der Bogenlänge; Satz von Bonnet 1.Teil: Einleitung und Vorbereitung
 echnische Universität Dortmund Fakultät für Mathematik Lehrstuhl VII: Differentialgeometrie Erste und zweite Variation der Bogenlänge; Satz von Bonnet.eil: Einleitung und Vorbereitung Seminar zur Vorlesung
echnische Universität Dortmund Fakultät für Mathematik Lehrstuhl VII: Differentialgeometrie Erste und zweite Variation der Bogenlänge; Satz von Bonnet.eil: Einleitung und Vorbereitung Seminar zur Vorlesung
Einführung. Ablesen von einander zugeordneten Werten
 Einführung Zusammenhänge zwischen Größen wie Temperatur, Geschwindigkeit, Lautstärke, Fahrstrecke, Preis, Einkommen, Steuer etc. werden mit beschrieben. Eine Zuordnung f, die jedem x A genau ein y B zuweist,
Einführung Zusammenhänge zwischen Größen wie Temperatur, Geschwindigkeit, Lautstärke, Fahrstrecke, Preis, Einkommen, Steuer etc. werden mit beschrieben. Eine Zuordnung f, die jedem x A genau ein y B zuweist,
Kapitel 6 Grenzwerte von Funktionen und Stetigkeit
 Kapitel 6 Grenzwerte von Funktionen und Stetigkeit 225 Relle Funktionen Im Folgenden betrachten wir reelle Funktionen f : D R, mit D R. Wir suchen eine formale Definition für den folgenden Sachverhalt.
Kapitel 6 Grenzwerte von Funktionen und Stetigkeit 225 Relle Funktionen Im Folgenden betrachten wir reelle Funktionen f : D R, mit D R. Wir suchen eine formale Definition für den folgenden Sachverhalt.
Analysis II (FS 2015): ZUSAMMENHÄNGENDE METRISCHE RÄUME
: ZUSAMMENHÄNGENDE METRISCHE RÄUME") Analysis II (FS 2015): ZUSAMMENHÄNGENDE METRISCHE RÄUME Dietmar A. Salamon ETH-Zürich 23. Februar 2015 1 Topologische Grundbegriffe Sei (X, d) ein metrischer Raum, d.h. X ist eine Menge und d : X X R ist
Analysis II (FS 2015): ZUSAMMENHÄNGENDE METRISCHE RÄUME Dietmar A. Salamon ETH-Zürich 23. Februar 2015 1 Topologische Grundbegriffe Sei (X, d) ein metrischer Raum, d.h. X ist eine Menge und d : X X R ist
Stochastik I. Vorlesungsmitschrift
 Stochastik I Vorlesungsmitschrift Ulrich Horst Institut für Mathematik Humboldt-Universität zu Berlin Inhaltsverzeichnis 1 Grundbegriffe 1 1.1 Wahrscheinlichkeitsräume..................................
Stochastik I Vorlesungsmitschrift Ulrich Horst Institut für Mathematik Humboldt-Universität zu Berlin Inhaltsverzeichnis 1 Grundbegriffe 1 1.1 Wahrscheinlichkeitsräume..................................
Effiziente Algorithmen (SS2015)
") Effiziente Algorithmen (SS205) Kapitel 5 Approximation II Walter Unger Lehrstuhl für Informatik 2.06.205 07:59 5 Inhaltsverzeichnis < > Walter Unger 5.7.205 :3 SS205 Z Inhalt I Set Cover Einleitung Approximation
Effiziente Algorithmen (SS205) Kapitel 5 Approximation II Walter Unger Lehrstuhl für Informatik 2.06.205 07:59 5 Inhaltsverzeichnis < > Walter Unger 5.7.205 :3 SS205 Z Inhalt I Set Cover Einleitung Approximation
Projektionen auf abgeschlossene konvexe Mengen
 Projektionen auf abgeschlossene konvexe Mengen Seminarvortrag von Veronika Pick Seminar Optimierung bei Herrn Prof. Dr. F. Jarre Heinrich-Heine-Universität Düsseldorf SS 2006 1 Vorbemerkung Das Seminarthema
Projektionen auf abgeschlossene konvexe Mengen Seminarvortrag von Veronika Pick Seminar Optimierung bei Herrn Prof. Dr. F. Jarre Heinrich-Heine-Universität Düsseldorf SS 2006 1 Vorbemerkung Das Seminarthema
G. Zachmann Clausthal University, Germany
 lausthal Informatik II Suchen lausthal University, ermany zach@in.tu-clausthal.de Problemstellung egeben ist eine Menge von Datensätzen {A1,...,An} esucht sind die Datensätze, deren Schlüssel (Key) = A[i].key
lausthal Informatik II Suchen lausthal University, ermany zach@in.tu-clausthal.de Problemstellung egeben ist eine Menge von Datensätzen {A1,...,An} esucht sind die Datensätze, deren Schlüssel (Key) = A[i].key
Algorithmische Geometrie: Delaunay Triangulierung (Teil 1)
") Algorithmische Geometrie: Delaunay Triangulierung (Teil 1) Nico Düvelmeyer WS 2009/2010, 26.1.2010 Überblick 1 Motivation Interpolation von Höhendaten 2 Triangulierungen von ebenen Punktmengen 3 Delaunay
Algorithmische Geometrie: Delaunay Triangulierung (Teil 1) Nico Düvelmeyer WS 2009/2010, 26.1.2010 Überblick 1 Motivation Interpolation von Höhendaten 2 Triangulierungen von ebenen Punktmengen 3 Delaunay
Definition 3.1. Sei A X. Unter einer offenen Überdeckung von A versteht man eine Familie (U i ) i I offener Mengen U i X mit U i
 i I offener Mengen U i X mit U i") 3 Kompaktheit In der Analysis I zeigt man, dass stetige Funktionen f : [a, b] R auf abgeschlossenen, beschränkten Intervallen [a, b] gleichmäßig stetig und beschränkt sind und dass sie ihr Supremum und
3 Kompaktheit In der Analysis I zeigt man, dass stetige Funktionen f : [a, b] R auf abgeschlossenen, beschränkten Intervallen [a, b] gleichmäßig stetig und beschränkt sind und dass sie ihr Supremum und
Basis eines Vektorraumes
 Basis eines Vektorraumes Basisergänzungssatz: Ist U V ein Unterraum von V und dim V = n, so kann jede Menge linear unabhängiger Vektoren aus U zu einer Basis von U erweitert werden Und es gilt: Beweis:
Basis eines Vektorraumes Basisergänzungssatz: Ist U V ein Unterraum von V und dim V = n, so kann jede Menge linear unabhängiger Vektoren aus U zu einer Basis von U erweitert werden Und es gilt: Beweis:
Informatik III - WS07/08
 Informatik III - WS07/08 Kapitel 4 1 Informatik III - WS07/08 Prof. Dr. Dorothea Wagner dwagner@ira.uka.de Kapitel 4 : Komplexitätsklassen Informatik III - WS07/08 Kapitel 4 2 Sprachen, Probleme, Zeitkomplexität
Informatik III - WS07/08 Kapitel 4 1 Informatik III - WS07/08 Prof. Dr. Dorothea Wagner dwagner@ira.uka.de Kapitel 4 : Komplexitätsklassen Informatik III - WS07/08 Kapitel 4 2 Sprachen, Probleme, Zeitkomplexität
Algorithmische Geometrie, SoSe 2005 Skriptmitschrift vom 29. April 2005
 Algorithmische Geometrie, SoSe 2005 Skriptmitschrift vom 29. April 2005 Antonia Wittmers Igor Savchenko Konvexe Hüllen Inkrementeller Algorithmus für die konvexe Hülle Dabei heißt inkrementeller Algorithmus,
Algorithmische Geometrie, SoSe 2005 Skriptmitschrift vom 29. April 2005 Antonia Wittmers Igor Savchenko Konvexe Hüllen Inkrementeller Algorithmus für die konvexe Hülle Dabei heißt inkrementeller Algorithmus,
Kapitel 1. Exakte Suche nach einem Wort. R. Stiebe: Textalgorithmen, WS 2003/04 11
 Kapitel 1 Exakte Suche nach einem Wort R. Stiebe: Textalgorithmen, WS 2003/04 11 Überblick Aufgabenstellung Gegeben: Text T Σ, Suchwort Σ mit T = n, = m, Σ = σ Gesucht: alle Vorkommen von in T Es gibt
Kapitel 1 Exakte Suche nach einem Wort R. Stiebe: Textalgorithmen, WS 2003/04 11 Überblick Aufgabenstellung Gegeben: Text T Σ, Suchwort Σ mit T = n, = m, Σ = σ Gesucht: alle Vorkommen von in T Es gibt
Klausur SoSe Juli 2013
 Universität Osnabrück / FB6 / Theoretische Informatik Prof. Dr. M. Chimani Informatik D: Einführung in die Theoretische Informatik Klausur SoSe 2013 11. Juli 2013 (Prüfungsnr. 1007049) Gruppe: Batman,
Universität Osnabrück / FB6 / Theoretische Informatik Prof. Dr. M. Chimani Informatik D: Einführung in die Theoretische Informatik Klausur SoSe 2013 11. Juli 2013 (Prüfungsnr. 1007049) Gruppe: Batman,
Mathematik I. Vorlesung 27. Differenzierbare Funktionen. In diesem Abschnitt betrachten wir Funktionen f :D K, wobei D K eine offene Menge in K ist.
 Prof. Dr. H. Brenner Osnabrück WS 2009/2010 Mathematik I Vorlesung 27 Differenzierbare Funktionen In diesem Abschnitt betrachten wir Funktionen, wobei D K eine offene Menge in K ist. Definition 27.1. Sei
Prof. Dr. H. Brenner Osnabrück WS 2009/2010 Mathematik I Vorlesung 27 Differenzierbare Funktionen In diesem Abschnitt betrachten wir Funktionen, wobei D K eine offene Menge in K ist. Definition 27.1. Sei
Übungsblatt 7 - Voronoi Diagramme
 Karlsruher Institut für Technologie Algorithmische Geometrie Fakultät für Informatik Sommersemester 2012 ITI Wagner Martin Nöllenburg/Andreas Gemsa Übungsblatt 7 - Voronoi Diagramme 1 Voronoi-Zellen Sei
Karlsruher Institut für Technologie Algorithmische Geometrie Fakultät für Informatik Sommersemester 2012 ITI Wagner Martin Nöllenburg/Andreas Gemsa Übungsblatt 7 - Voronoi Diagramme 1 Voronoi-Zellen Sei
17. Orthogonalsysteme
 17. Orthogonalsysteme 17.1. Winkel und Orthogonalität Vorbemerkung: Sei V ein Vektorraum mit Skalaprodukt, und zugehöriger Norm, dann gilt nach Cauchy-Schwarz: x, y V \ {0} : x, y x y 1 Definition: (a)
17. Orthogonalsysteme 17.1. Winkel und Orthogonalität Vorbemerkung: Sei V ein Vektorraum mit Skalaprodukt, und zugehöriger Norm, dann gilt nach Cauchy-Schwarz: x, y V \ {0} : x, y x y 1 Definition: (a)
17 Lineare Abbildungen
 Chr.Nelius: Lineare Algebra II (SS2005) 1 17 Lineare Abbildungen Wir beginnen mit der Klärung des Abbildungsbegriffes. (17.1) DEF: M und N seien nichtleere Mengen. Eine Abbildung f von M nach N (in Zeichen:
Chr.Nelius: Lineare Algebra II (SS2005) 1 17 Lineare Abbildungen Wir beginnen mit der Klärung des Abbildungsbegriffes. (17.1) DEF: M und N seien nichtleere Mengen. Eine Abbildung f von M nach N (in Zeichen:
Theorem 9 Sei G eine Verteilungsfunktion in IR. 1. Quantil-Transformation: Wenn U U(0, 1) (standard Gleichverteilung), dann gilt P(G (U) x) = G(x).
 (standard Gleichverteilung), dann gilt P(G (U) x) = G(x).") Theorem 9 Sei G eine Verteilungsfunktion in IR. 1. Quantil-Transformation: Wenn U U(0, 1) (standard Gleichverteilung), dann gilt P(G (U) x) = G(x). 2. Wahrscheinlichkeit-Transformation: Sei Y eine Zufallsvariable
Theorem 9 Sei G eine Verteilungsfunktion in IR. 1. Quantil-Transformation: Wenn U U(0, 1) (standard Gleichverteilung), dann gilt P(G (U) x) = G(x). 2. Wahrscheinlichkeit-Transformation: Sei Y eine Zufallsvariable
Lösungen zum Übungsblatt 7
 Lösungen zum Übungsblatt 7 Mirko Getzin Universität Bielefeld Fakultät für Mathematik 5. Dezember 203 Ich gebe keine Gewähr auf eine vollständige Richtigkeit der Lösungen zu den Übungsaufgaben. Das Dokument
Lösungen zum Übungsblatt 7 Mirko Getzin Universität Bielefeld Fakultät für Mathematik 5. Dezember 203 Ich gebe keine Gewähr auf eine vollständige Richtigkeit der Lösungen zu den Übungsaufgaben. Das Dokument