Kinematische Ingenieurvermessung von Autobahnen und U-Bahnen mit Hochleistungs-Laserscannern
|
|
|
- Elly Wolf
- vor 7 Jahren
- Abrufe
Transkript
1 Kinematische Ingenieurvermessung von Autobahnen und U-Bahnen mit Hochleistungs-Laserscannern 3D MAPPING

2 Tätigkeitsgebiete der 3D Mapping Solutions GmbH Kinematische Aufnahme von Straßennetzen Fahrzeugnavigation Straßenbauverwaltungen Automobilindustrie Kinematische Erfassung von Fahrbahnoberflächen Fahrsimulation Grundlagenvermessung für die Sanierung von Fahrbahndecken Zustandserfassung Messtechnik Hardware / Software für kinematische Vermessung Beratung und Systemintegration

3 Das Mobile Straßen Erfassungs- System (MoSES) Aufnahme des Straßen- oder Schienenkorridors mit ca. 40 m Breite Erfassung des Raumes mit Hilfe präziser Positions- und Orientierungsbestimmung für die Messplattform redundanter Sensorik (Multikamerasystem und Laserscanner) 8 Kameras 2 Standard-Laserscanner 2 Hochleistungs-Laserscanner Datenprozessierung Getrennt von der Erfassung Aufwand skalierbar nach Genauigkeit

4 MoSES - Systemkonzept Modul Trajektorie Kontinuierliche Bereitstellung von Position und Orientierung für alle Sensoren Modul Bilddokumentation Multikamerasystem zur bildhaften Dokumentation des Aufnahmekorridors sowie der Fahrbahnoberfläche Modul Stereo-Photogrammetrie Objektmessung in Stereobildpaaren Modul Laserscanner Digitalisierung des Aufnahmekorridors, insbesondere der Fahrbahnoberfläche

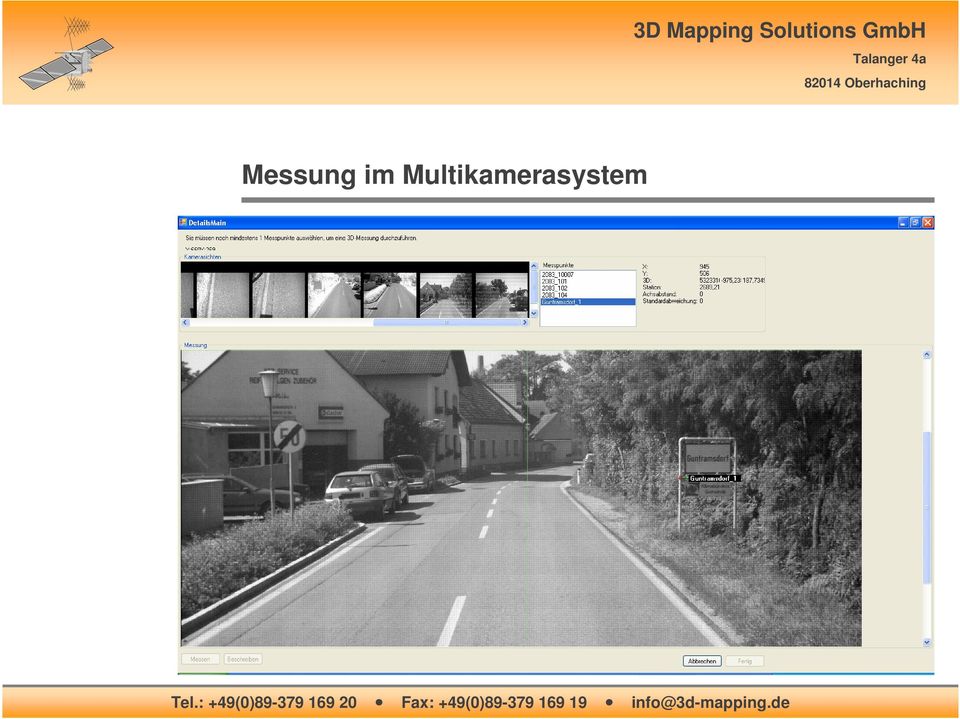
5 Georeferenzierte Bilddokumentation des Straßenraumes Gesichtsfelder der Kameras Bildhafte Dokumentation des Straßenraumes und der Fahrbahnoberfläche Flexibles Multi-Kamera-System mit verschiedenen Möglichkeiten, Art, Anzahl und Ausrichtung unterschiedlicher Kameras zu kombinieren. Jedes Bild wird exakt georeferenziert und orientiert.

6 3D Mapping Solutions GmbH Georeferenzierte Bilddokumentation des Straßenraumes Infrarot-Kameras Gesichtsfelder der Kameras Tel.: +49(0) Fax: +49(0)
89-379 169 20 Fax: +49(0)89-379 169 19")
7 Georeferenzierte Bilddokumentation des Straßenraumes Typische Anordnung der Kameras

8 Objektbestimmung in Stereobildern Aufnahme des Verkehrsraumes in Stereobildpaaren Dreidimensionale Objekterfassung (Lage und Höhe) Zuordnung von Attributen Bestimmung von relativen Maßen Markierungen, Sperrflächen, Fahrstreifen, Randstreifen, Schilder, Ampeln, Beleuchtung, Schutzplanken, Entwässerung, Bäume, Zäune, Wände, Bankett, Grünstreifen, Fahrbahnbreiten, Durchfahrtshöhen/-breiten u.a.

9 Objektbestimmung in Stereobildern

10 Messung im Multikamerasystem

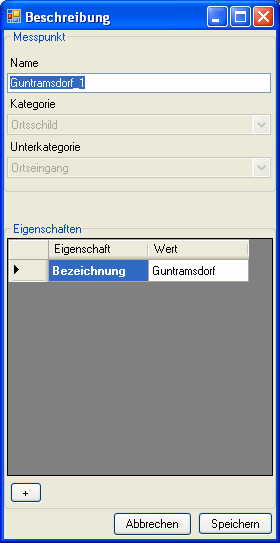
11 Vergabe der GIS Objektbezeichnungen und Attribute

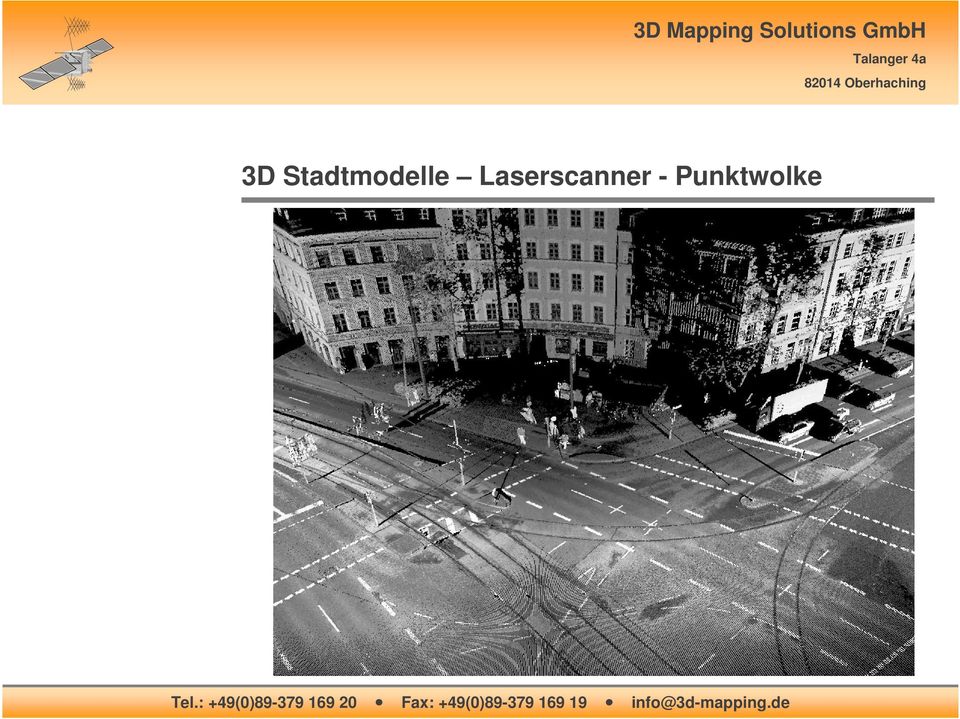
12 Anwendungen für hochauflösende Scanner-Punktwolken Vorteile: keine Behinderung des Verkehrs schnellere Projektdurchführung sehr detaillierte Vermessungsergebnisse (punktgenau) vergleichbare Genauigkeit zur statischen Vermessung Objekte können direkt in Scannerdaten gemessen werden (Interaktion mit der Photogrammetrie) Automatische Objektextraktion Fahrsimulation 3D Stadtmodellierung, Brücken- und Tunnelmessung Präzise Oberflächenmodelle für Planung, Bau, Qualitätsprüfung und Zustandserfassung

13 3D Stadtmodelle Laserscanner - Punktwolke

14 3D Stadtmodelle Laserscanner - Punktwolke

15 3D Stadtmodelle Laserscanner - Punktwolke
16 MoSES Systemspezifikationen Max. Aufnahmegeschwindigkeit v = 100 km/h Messleistung abhängig vom Einsatzgebiet zwischen 100 km/tag und 400 km/tag Bestimmung der Trajektorie mit 200 Hz Bei v = 20 m/s wird alle 0,1 m eine Position bestimmt. Vollständige, dreidimensionale Erfassung aller Bewegungen des Messfahrzeuges Genauigkeit der Positionsbestimmung Skalierbar je nach Zielsetzung und Aufwand zwischen 0,02 m und 1 m. Details der Genauigkeitsstufen I bis III siehe folgende Seite Aus den gespeicherten Daten kann auch nach Abschluss der Befahrung nachträglich jede der drei Genauigkeitsklassen erzeugt werden. Relative Genauigkeit der Objekte im Aufnahmekorridor Photogrammmetrie (relative Lage) σ < 0,05 m Laserscanner (relative Lage) σ < 0,005 m

17 Absolute Genauigkeit der Positionsbestimmung Stufe III ( Meter ) Differentielles GPS mit einfachen Korrekturdaten (global verfügbar, z.b. Omnistar) Stufe II ( Dezimeter ) Differentielles GPS mit Referenzstationen (z.b. SAPOS in Deutschland) Stufe I ( Zentimeter ) Nutzung von Passpunkten Standardabweichung der Position des MoSES Volle DGPS Abdeckung: Position (R,H): 1 m; Höhe(h): 1,5 m 120 Sekunden DGPS Ausfall: Position (R,H): 1,6 m; Höhe(h): 2,1 m Volle DGPS Abdeckung: Position (R,H): 0,02 m; Höhe(h): 0,03 m 120 Sekunden DGPS Ausfall: Position (R,H): 0,27 m; Höhe(h): 0,35 m Abstand der Passpunkte: 200 bis 250 m Messung der Passpunkte mit Laserscannern Position (R,H): 0,02 m; Höhe(h): 0,005 m Anwendungsgebiete Navigation Einfache Aufnahme von Straßennetzen (innerorts oder außerorts) Aufnahme von Straßennetzen für die Straßeninformationsbank Fahrerassistenzsysteme Vermessung mit statischer Genauigkeit, z.b. Messung von Fahrbahndecken
: 0,02 m; Höhe(h): 0,005 m Anwendungsgebiete Navigation Einfache Aufnahme von Straßennetzen (innerorts oder außerorts) Aufnahme von")
18 Kalibrierung und Qualitätskontrolle Referenzpunktfeld 4672 Kontrollpunkte Resultierende Standardabweichung: 4 mm (3D Mapping Standard-Scanner) mm (Zoller & Fröhlich Imager 5006)
 1.")
19 kinematische Ingenieurvermessung Aufnahme der straßen- oder schienenseitigen Messdaten vom Fahrzeug aus. hohe Aufnahmegeschwindigkeit hohe Messdatenauflösung Anbindung der Messergebnisse an das lokale Netz über begleitende Passpunkte Auswertung der Vermessungsdaten photogrammetrisch in den Messbildern und in den Laserscannerdaten Zusammenarbeit mit der klassischen Ingenieurvermessung: Passpunkte (abgeleitet aus dem örtlichen Festpunktnetz) Verdichtung der Messergebnisse im Randbereich neben der Autobahn
 Verdichtung der")
20 kinematische Ingenieurvermessung: Erzeugung von Oberflächenmodellen der Straße Achsbegleitendes Raster für das Oberflächenmodell Querprofile und Längsprofile entlang der Fahrbahnachse Flexible Rasterweite im Profil Variabler Profilabstand Rasterweiten zwischen 0,02 m (Fahrsimulation) 0,2 m (Deckensanierung) 1 m (Straßenbestandsdaten)
 0,2 m (Deckensanierung) 1 m")
21 Ausschnitt aus einem Oberflächenmodell
22 Beispiel: Oberflächenmodell für ein Autobahnkreuz
23 Das Endergebnis...

89-379 169 20 Fax:")
24 3D Mapping Solutions GmbH Kinematische Ingenieurvermessung eines U-Bahn-Netzes Tel.: +49(0) Fax: +49(0)
25 Kinematische Ingenieurvermessung eines U-Bahn-Netzes
26 Kinematische Ingenieurvermessung eines U-Bahn-Netzes
27 Kinematische Ingenieurvermessung eines U-Bahn-Netzes
28 Kinematische Ingenieurvermessung eines U-Bahn-Netzes
29 Kinematische Ingenieurvermessung eines U-Bahn-Netzes
30 Vielen Dank für Ihre Aufmerksamkeit
Erstellung von 3D Katasterdaten für Städte und Gemeinden mit mobilen Vermessungsmethoden. Dr.-Ing. Gunnar Gräfe 3D Mapping Solutions GmbH
 Erstellung von 3D Katasterdaten für Städte und Gemeinden mit mobilen Vermessungsmethoden Dr.-Ing. Gunnar Gräfe 3D Mapping Solutions GmbH Tätigkeitsgebiete der 3D Mapping Solutions GmbH Kinematische Aufnahme
Erstellung von 3D Katasterdaten für Städte und Gemeinden mit mobilen Vermessungsmethoden Dr.-Ing. Gunnar Gräfe 3D Mapping Solutions GmbH Tätigkeitsgebiete der 3D Mapping Solutions GmbH Kinematische Aufnahme
Kinematische Bestandsdatenerfassung mit Laserscannern
 Kinematische Bestandsdatenerfassung mit Laserscannern 3D MAPPING Das Mobile Straßen Erfassungs- System (MoSES) Aufnahme des Straßen- oder Schienenkorridors mit ca. 40 m Breite Erfassung des Raumes mit
Kinematische Bestandsdatenerfassung mit Laserscannern 3D MAPPING Das Mobile Straßen Erfassungs- System (MoSES) Aufnahme des Straßen- oder Schienenkorridors mit ca. 40 m Breite Erfassung des Raumes mit
PRÄZISION IN BEWEGUNG
 PRÄZISION IN BEWEGUNG Autobahn Kinematische Vermessung Systemintegration Software Tunnelaufnahmen Bahnstrecken- Dokumentation Flughafenvermessung 3D Stadtmodelle www.3d-mapping.de 3D MAPPING SOLUTIONS
PRÄZISION IN BEWEGUNG Autobahn Kinematische Vermessung Systemintegration Software Tunnelaufnahmen Bahnstrecken- Dokumentation Flughafenvermessung 3D Stadtmodelle www.3d-mapping.de 3D MAPPING SOLUTIONS
Hocheffiziente Bestandsdatenerfassung durch portables Laserscanning
 Hocheffiziente Bestandsdatenerfassung durch portables Laserscanning Dr. Christian Hesse, dhp:i www.dhpi.com 4. Hamburger Anwenderforum TLS 1 Dr. Hesse und Partner Ingenieure Hamburg / Buxtehude 25+ Mitarbeiter
Hocheffiziente Bestandsdatenerfassung durch portables Laserscanning Dr. Christian Hesse, dhp:i www.dhpi.com 4. Hamburger Anwenderforum TLS 1 Dr. Hesse und Partner Ingenieure Hamburg / Buxtehude 25+ Mitarbeiter
Bildflug - Navigation - HS BO Lab. für Photogrammetrie: Navigation 1
 Bildflug - Navigation - HS BO Lab. für Photogrammetrie: Navigation 1 Zielsetzung Direkte Messung der Position und Orientierung des airborne Sensors Notwendige Sensorik: GPS, IMU Zeitstempel: Position/
Bildflug - Navigation - HS BO Lab. für Photogrammetrie: Navigation 1 Zielsetzung Direkte Messung der Position und Orientierung des airborne Sensors Notwendige Sensorik: GPS, IMU Zeitstempel: Position/
Hochgenaue kinematische Ingenieurvermessung
 Hochgenaue kinematische Ingenieurvermessung Martin Lang Copyright 2018 3D Mapping Solutions GmbH (The information contained herein is subject to change without notice.) Messsystem GPS-Empfänger Inertiale
Hochgenaue kinematische Ingenieurvermessung Martin Lang Copyright 2018 3D Mapping Solutions GmbH (The information contained herein is subject to change without notice.) Messsystem GPS-Empfänger Inertiale
Interne Qualitäts- und Datenkontrolle
 Interne Qualitäts- und Datenkontrolle Henning Klein (M.Sc. Geodäsie und Geoinformationswesen, Technische Universität Darmstadt) Copyright 2018 3D Mapping Solutions GmbH (The information contained herein
Interne Qualitäts- und Datenkontrolle Henning Klein (M.Sc. Geodäsie und Geoinformationswesen, Technische Universität Darmstadt) Copyright 2018 3D Mapping Solutions GmbH (The information contained herein
Mobile Erfassung von Straßendaten zur Umsetzung der EU-Umgebungslärmrichtlinie
 Mobile Erfassung von Straßendaten zur Umsetzung der EU-Umgebungslärmrichtlinie Logo Kunde Vortrag NWSIB-Tage Gelsenkirchen Freitag, 9.11.07 TÜV Rheinland Herr Jörg Müller j.mueller@umwelt-tuv.de Unser
Mobile Erfassung von Straßendaten zur Umsetzung der EU-Umgebungslärmrichtlinie Logo Kunde Vortrag NWSIB-Tage Gelsenkirchen Freitag, 9.11.07 TÜV Rheinland Herr Jörg Müller j.mueller@umwelt-tuv.de Unser
Erfahrungen bei der kinematischen Erfassung von Verkehrswegen mit MoSES
 Ingenieurvermessung 2004 14th International Conference on Engineering Surveying Zürich, 15. 19. März 2004 Erfahrungen bei der kinematischen Erfassung von Verkehrswegen mit MoSES Gunnar Gräfe*, Wilhelm
Ingenieurvermessung 2004 14th International Conference on Engineering Surveying Zürich, 15. 19. März 2004 Erfahrungen bei der kinematischen Erfassung von Verkehrswegen mit MoSES Gunnar Gräfe*, Wilhelm
Erfassung und Darstellung von Infrastrukturdaten mit GIS, Laserscanner und Befahrungsbildern
 10. Mitteldeutsches GEOforum, 19. September 2013, Leipzig Erfassung und Darstellung von Infrastrukturdaten mit GIS, Laserscanner und Befahrungsbildern Inhalt / Methodik Gesetzesgrundlagen FGSV / DOPPIK
10. Mitteldeutsches GEOforum, 19. September 2013, Leipzig Erfassung und Darstellung von Infrastrukturdaten mit GIS, Laserscanner und Befahrungsbildern Inhalt / Methodik Gesetzesgrundlagen FGSV / DOPPIK
10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart
 10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart M.Eng. Marius Ziegler Projektleiter: Prof. Dr. M. Hahn 07. November 2014 Mobile Mapping Kernelemente Messgeräte zur Positionsbestimmung
10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart M.Eng. Marius Ziegler Projektleiter: Prof. Dr. M. Hahn 07. November 2014 Mobile Mapping Kernelemente Messgeräte zur Positionsbestimmung
Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren.
 Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren www.joanneum.at/digital Wozu braucht mein Auto eine Karte? 2 Mensch als Fahrer: Karte wird zum Navigieren
Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren www.joanneum.at/digital Wozu braucht mein Auto eine Karte? 2 Mensch als Fahrer: Karte wird zum Navigieren
Erfassung untertägiger Hohlräume mit dem IPS-System bei der RAG Aktiengesellschaft Volker Spreckels, Andreas Schlienkamp
 Erfassung untertägiger Hohlräume mit dem IPS-System bei der Volker Spreckels, Andreas Schlienkamp IPS - Forschung und Entwicklung (FuE) Bei DLR entwickelt für Indoor-Navigation IPS = Integrated Positioning
Erfassung untertägiger Hohlräume mit dem IPS-System bei der Volker Spreckels, Andreas Schlienkamp IPS - Forschung und Entwicklung (FuE) Bei DLR entwickelt für Indoor-Navigation IPS = Integrated Positioning
Grundlagen der optischen Geometrievermessung und deren Anwendungen
 Grundlagen der optischen Geometrievermessung und deren Anwendungen Christian Gerlach Innovationstag 2010 1 Gliederung: Grundlagen der Photogrammetrie Stand der Technik Industrielle Anwendungen der Photogrammetrie
Grundlagen der optischen Geometrievermessung und deren Anwendungen Christian Gerlach Innovationstag 2010 1 Gliederung: Grundlagen der Photogrammetrie Stand der Technik Industrielle Anwendungen der Photogrammetrie
Möglichkeiten und Erfahrungen bei der Anwendung von UAV Systemen in der Vermessung Benjamin Busse, Martin Schwall, IngenieurTeam GEO GmbH
 Möglichkeiten und Erfahrungen bei der Anwendung von UAV Systemen in der Vermessung Benjamin Busse, Martin Schwall, IngenieurTeam GEO GmbH 12. -13. Juli 2016, ZV WV Kleine Kinzig Möglichkeiten und Erfahrungen
Möglichkeiten und Erfahrungen bei der Anwendung von UAV Systemen in der Vermessung Benjamin Busse, Martin Schwall, IngenieurTeam GEO GmbH 12. -13. Juli 2016, ZV WV Kleine Kinzig Möglichkeiten und Erfahrungen
Dokumentation. Bestandsaufnahmen. Vorteile. und. Bestandsdokumentationen mit neuen Techniken
 und Dokumentation Bestandsaufnahmen Vorteile Bestandsdokumentationen mit neuen Techniken Überkopfwegweiser, Brückeninspektionen, Fahrbahnkontrolle, Inspektionen von Stützmauern, Kontrolle von Sicherungsmaßnahmen,
und Dokumentation Bestandsaufnahmen Vorteile Bestandsdokumentationen mit neuen Techniken Überkopfwegweiser, Brückeninspektionen, Fahrbahnkontrolle, Inspektionen von Stützmauern, Kontrolle von Sicherungsmaßnahmen,
Improving the Accuracy of GPS
 Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Aktuelle Anwendungen in der Fotogrammetrie
 Aktuelle Anwendungen in der Fotogrammetrie SOGI Feierabend Forum, Basel 19.11.2014 / Fabian Huber Folie 1 Agenda KOPA und KOPA Geoservices GmbH Fotogrammetrie heute Plattformen für fotogrammetrische Aufnahmen
Aktuelle Anwendungen in der Fotogrammetrie SOGI Feierabend Forum, Basel 19.11.2014 / Fabian Huber Folie 1 Agenda KOPA und KOPA Geoservices GmbH Fotogrammetrie heute Plattformen für fotogrammetrische Aufnahmen
Kinematische Anwendungen von Laserscannern im Straßenraum
 Heft 84 Neubiberg, 28 G. Gräfe Kinematische Anwendungen von Laserscannern im Straßenraum SCHRIFTENREIHE STUDIENGANG GEODÄSIE UND GEOINFORMATION Der Druck dieses Heftes wurde aus Haushaltsmitteln der Universität
Heft 84 Neubiberg, 28 G. Gräfe Kinematische Anwendungen von Laserscannern im Straßenraum SCHRIFTENREIHE STUDIENGANG GEODÄSIE UND GEOINFORMATION Der Druck dieses Heftes wurde aus Haushaltsmitteln der Universität
SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE. www.scan-go.eu www.shop.laserscanning-europe.com V.02.2014
 SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE V.02.2014 www.scan-go.eu www.shop.laserscanning-europe.com SCAN&GO SYSTEM (PATENTRECHTLICH GESCHÜTZT) DIE NEUE VERMESSUNGSTECHNOLOGIE Scan&Go ist eine neue Methode
SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE V.02.2014 www.scan-go.eu www.shop.laserscanning-europe.com SCAN&GO SYSTEM (PATENTRECHTLICH GESCHÜTZT) DIE NEUE VERMESSUNGSTECHNOLOGIE Scan&Go ist eine neue Methode
GIS mittels photogrammetrischer
 m. b. H. Workshop Anwendung von NRW Grundlagenermittlung für GIS mittels photogrammetrischer Methoden Folie:1 AGENDA Das Unternehmen Problemstellung Lösungsansatz Workflow Luftbildbefliegung Datenerfassung
m. b. H. Workshop Anwendung von NRW Grundlagenermittlung für GIS mittels photogrammetrischer Methoden Folie:1 AGENDA Das Unternehmen Problemstellung Lösungsansatz Workflow Luftbildbefliegung Datenerfassung
3. Hamburger Anwenderforum Terrestrisches Laserscanning 2009, 16. Juni 2009
 Institute for Photogrammetry and GeoInformation Leibniz University Hannover 3. er Anwenderforum Terrestrisches Laserscanning 2009, 16. Juni 2009 Dokumentation der historischen Halbinsel von Istanbul durch
Institute for Photogrammetry and GeoInformation Leibniz University Hannover 3. er Anwenderforum Terrestrisches Laserscanning 2009, 16. Juni 2009 Dokumentation der historischen Halbinsel von Istanbul durch
Entwicklung eines fächerartigen Distanzmesssystems zur Messung von Rotorblättern. Konzept, Orientierung und erste Ergebnisse
 Entwicklung eines fächerartigen Distanzmesssystems zur Messung von Rotorblättern Konzept, Orientierung und erste Ergebnisse Martina Göring M.Sc. & Prof. Dr. Thomas Luhmann AUFGABENSTELLUNG Entwicklung
Entwicklung eines fächerartigen Distanzmesssystems zur Messung von Rotorblättern Konzept, Orientierung und erste Ergebnisse Martina Göring M.Sc. & Prof. Dr. Thomas Luhmann AUFGABENSTELLUNG Entwicklung
Aktualisierung topographischer Daten mit dem SAPOS -Dienst EPS (RASANT)
") Aktualisierung topographischer Daten mit dem SAPOS -Dienst EPS (RASANT) Carsten Kleinfeldt, Schwerin Zusammenfassung Der Beitrag beschreibt eine Lösung des Landesvermessungsamtes Mecklenburg- Vorpommern
Aktualisierung topographischer Daten mit dem SAPOS -Dienst EPS (RASANT) Carsten Kleinfeldt, Schwerin Zusammenfassung Der Beitrag beschreibt eine Lösung des Landesvermessungsamtes Mecklenburg- Vorpommern
Geodätisches Kolloquium
 Geodätisches Kolloquium Projekte der Ingenieurvermessung DVW NRW e.v. Gesellschaft für Geodäsie Geoinformation und Landmanagement Deutscher Dachverband für Geoinformation e.v. Hochschule Bochum DVW VDV
Geodätisches Kolloquium Projekte der Ingenieurvermessung DVW NRW e.v. Gesellschaft für Geodäsie Geoinformation und Landmanagement Deutscher Dachverband für Geoinformation e.v. Hochschule Bochum DVW VDV
LiDAR Mobile Mapping
 Institut für Kartographie und Geoinformatik Leibniz Universität Hannover LiDAR Mobile Mapping Visualisierung, Vermessung, Fahrerassistenz Claus.Brenner@ikg.uni-hannover.de IKG Erfassungsfahrzeug Riegl
Institut für Kartographie und Geoinformatik Leibniz Universität Hannover LiDAR Mobile Mapping Visualisierung, Vermessung, Fahrerassistenz Claus.Brenner@ikg.uni-hannover.de IKG Erfassungsfahrzeug Riegl
> systematische Erhebung von Geodaten > Andreas Richter Fachaustausch Geoinformation 2016 >
 DLR.de Folie 1 Geodaten und deren systematische Erhebung für Test und Entwicklung von Fahrerassistenz- und Automationssystemen Fachaustausch Geoinformation 2016 24.11.2016, Heidelberg Andreas Richter DLR.de
DLR.de Folie 1 Geodaten und deren systematische Erhebung für Test und Entwicklung von Fahrerassistenz- und Automationssystemen Fachaustausch Geoinformation 2016 24.11.2016, Heidelberg Andreas Richter DLR.de
m4guide mobile multimodal mobility guide
 m4guide mobile multimodal mobility guide Auftaktveranstaltung Tür zu Tür - Projekte des Bundesministeriums für Wirtschaft und Technologie 17.Oktober 2013 in Bonn Referent: Michael Beer Inhalt 1. Projektziele
m4guide mobile multimodal mobility guide Auftaktveranstaltung Tür zu Tür - Projekte des Bundesministeriums für Wirtschaft und Technologie 17.Oktober 2013 in Bonn Referent: Michael Beer Inhalt 1. Projektziele
Moderne Vermessungsinstrumente: Von Richtungs- und Distanzmessern zu perfekten Koordinatenmessmaschinen? Johannes Schwarz Leica Geosystems
 Moderne Vermessungsinstrumente: Von Richtungs- und Distanzmessern zu perfekten Koordinatenmessmaschinen? Johannes Schwarz Leica Geosystems 16.11.2017 Vermessung zu meinen Kindheitszeiten. 2 «Alles messen»
Moderne Vermessungsinstrumente: Von Richtungs- und Distanzmessern zu perfekten Koordinatenmessmaschinen? Johannes Schwarz Leica Geosystems 16.11.2017 Vermessung zu meinen Kindheitszeiten. 2 «Alles messen»
Mobile Mapping auf der Straße und aus der Luft
 Mobile Mapping auf der Straße und aus der Luft Robert Hau; Nebel & Partner Nebel & Partner, R. Hau 7. Hamburger Forum für Geomatik "Mobile Mapping auf der Straße und aus der Luft" 1 Ingenieur- und Katastervermessung
Mobile Mapping auf der Straße und aus der Luft Robert Hau; Nebel & Partner Nebel & Partner, R. Hau 7. Hamburger Forum für Geomatik "Mobile Mapping auf der Straße und aus der Luft" 1 Ingenieur- und Katastervermessung
HafenCity Universität Hamburg. Fachbereich Geomatik. Betreut wurde diese Arbeit durch: Prof. Dipl.-Ing. Thomas Kersten (HafenCity Universität Hamburg)
") Genauigkeitsuntersuchung für die Erfassung dreidimensionaler Bestandsdaten von Verkehrsanlagen mittels Airborne und Mobile Laserscanning 4. Hamburger Anwenderforum Terrestrisches Laserscanning 23.06.2011
Genauigkeitsuntersuchung für die Erfassung dreidimensionaler Bestandsdaten von Verkehrsanlagen mittels Airborne und Mobile Laserscanning 4. Hamburger Anwenderforum Terrestrisches Laserscanning 23.06.2011
Nutzen von Drohnendaten
 Nutzen von Drohnendaten Nutzen von Drohnendaten Die allnav ag ist kompletter Lösungsanbieter im Bereich UAS Jürg Pulfer Applikationsingenieur MEB Group allnav als wichtiger Bestandteil der MEB Group Experten
Nutzen von Drohnendaten Nutzen von Drohnendaten Die allnav ag ist kompletter Lösungsanbieter im Bereich UAS Jürg Pulfer Applikationsingenieur MEB Group allnav als wichtiger Bestandteil der MEB Group Experten
3D Umfeldrekonstruktion über Structure from Motion
 A HELLA-Group Company 3D Umfeldrekonstruktion über Structure from Motion Dr. Ralph Hänsel, Hella Aglaia Mobile Vision GmbH 11.12.2015 Symposium Beuth Hochschule Geometrische Modellierung und Computational
A HELLA-Group Company 3D Umfeldrekonstruktion über Structure from Motion Dr. Ralph Hänsel, Hella Aglaia Mobile Vision GmbH 11.12.2015 Symposium Beuth Hochschule Geometrische Modellierung und Computational
Anforderungen an den Netzanschluss Mit GNSS-Messungen immer im amtlichen Bezugssystem!
 Anforderungen an den Netzanschluss Mit GNSS-Messungen immer im amtlichen Bezugssystem! 1 Anschluss an das Koordinatenreferenzsystem ETRS89/UTM Über dauerhaft vermarkte AP, temporäre AP oder TP, die in
Anforderungen an den Netzanschluss Mit GNSS-Messungen immer im amtlichen Bezugssystem! 1 Anschluss an das Koordinatenreferenzsystem ETRS89/UTM Über dauerhaft vermarkte AP, temporäre AP oder TP, die in
Auswertung von Bilddaten aus UAV Flügen Von der klassischen Aerotriangulation zum Dense Image. Matching
 Auswertung von Bilddaten aus UAV Flügen Von der klassischen Aerotriangulation zum Dense Image Rainer Brechtken Rouven Borchert Heinz Jürgen Przybilla Rene Marcel Roderweiß Matching Gliederung Einleitung
Auswertung von Bilddaten aus UAV Flügen Von der klassischen Aerotriangulation zum Dense Image Rainer Brechtken Rouven Borchert Heinz Jürgen Przybilla Rene Marcel Roderweiß Matching Gliederung Einleitung
Ringvorlesung Einführung in die Geodäsie Photogrammetrie Teil 1: Stereophotogrammetrie
 Ringvorlesung Einführung in die Geodäsie Photogrammetrie Teil 1: Stereophotogrammetrie Was ist Photogrammetrie t? Stereoskopisches Sehen und Messen Grundprinzipien Anwendungsbeispiele Prof. Dr. habil.
Ringvorlesung Einführung in die Geodäsie Photogrammetrie Teil 1: Stereophotogrammetrie Was ist Photogrammetrie t? Stereoskopisches Sehen und Messen Grundprinzipien Anwendungsbeispiele Prof. Dr. habil.
Trajektorienbestimmung im Skisprung
 Dipl.-Ing. Petra Hafner Steyrergasse 30, 8010 Graz Trajektorienbestimmung im Skisprung P. Hafner M. Wieser N. Kühtreiber B. Wiesenhofer C. Abart B. Hofmann-Wellenhof (INAS) T. Nunner G. Paar (Joanneum
Dipl.-Ing. Petra Hafner Steyrergasse 30, 8010 Graz Trajektorienbestimmung im Skisprung P. Hafner M. Wieser N. Kühtreiber B. Wiesenhofer C. Abart B. Hofmann-Wellenhof (INAS) T. Nunner G. Paar (Joanneum
FÜR TECHNIK STUTTGART
 Herzlich Willkommen! Dipl.-Ing. (FH) Marco Schrempp Application Engineer HOCHSCHULE FÜR TECHNIK STUTTGART 01.12.2006 26. April 2007 AGENDA 1. Die AKG-Firmengruppe 2. GeoMedia und VESTRA 3. Geodäsieprojekt
Herzlich Willkommen! Dipl.-Ing. (FH) Marco Schrempp Application Engineer HOCHSCHULE FÜR TECHNIK STUTTGART 01.12.2006 26. April 2007 AGENDA 1. Die AKG-Firmengruppe 2. GeoMedia und VESTRA 3. Geodäsieprojekt
Effektives Datenmanagement im Straßenverkehrswesen. GEOforum Leipzig Dipl.-Ing. Thilo Jung GEO Net solution GmbH NETZWERK STRASSE
 Effektives Datenmanagement im Straßenverkehrswesen GEOforum Leipzig 13.06.2006 Dipl.-Ing. Thilo Jung GEO Net solution GmbH Datenmanagement im Straßenverkehrswesen Prozessketten Wirtschaftlichkeit Vorplanung
Effektives Datenmanagement im Straßenverkehrswesen GEOforum Leipzig 13.06.2006 Dipl.-Ing. Thilo Jung GEO Net solution GmbH Datenmanagement im Straßenverkehrswesen Prozessketten Wirtschaftlichkeit Vorplanung
Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung
 Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung Mobiles Laserscanning Straßenraum
Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung Mobiles Laserscanning Straßenraum
DMT Pilot 3D Mobile Mapping mit dem DMT Pilot 3D unter Tage M.Sc. Daniel Schröder
 Mobile Mapping mit dem unter Tage M.Sc. Daniel Schröder Idee 3-in-1 System zur präzisen Positions- und Lagebestimmung, Navigation und 3D-Dokumentation Technologie des DLR für die autonome Navigation eines
Mobile Mapping mit dem unter Tage M.Sc. Daniel Schröder Idee 3-in-1 System zur präzisen Positions- und Lagebestimmung, Navigation und 3D-Dokumentation Technologie des DLR für die autonome Navigation eines
Terrestrisches Laserscanning Ein allgemeiner Überblick über Messmethoden und Einsatzmöglichkeiten in der Geomatik. Hans-Martin Zogg, ETH Zürich
 Terrestrisches Laserscanning Ein allgemeiner Überblick über Messmethoden und Einsatzmöglichkeiten in der Geomatik Hans-Martin Zogg, ETH Zürich 2 Inhalt Terrestrisches Laserscanning Klassifizierung von
Terrestrisches Laserscanning Ein allgemeiner Überblick über Messmethoden und Einsatzmöglichkeiten in der Geomatik Hans-Martin Zogg, ETH Zürich 2 Inhalt Terrestrisches Laserscanning Klassifizierung von
Digitalisierung in der Bahninfrastruktur am Beispiel der Positionierung. ÖBB-Infrastruktur AG // GB SAE // Stab LCI
 Digitalisierung in der Bahninfrastruktur am Beispiel der Positionierung Dr. Michaela Haberler-Weber 21.6.2018 ÖBB-Infrastruktur AG Agenda Schwerpunkt 1: Mobile Mapping Schwerpunkt 2: Zugpositionierung
Digitalisierung in der Bahninfrastruktur am Beispiel der Positionierung Dr. Michaela Haberler-Weber 21.6.2018 ÖBB-Infrastruktur AG Agenda Schwerpunkt 1: Mobile Mapping Schwerpunkt 2: Zugpositionierung
LIMEZ III Der neue Lichtraummesszug der Deutschen Bahn
 LIMEZ III Der neue Lichtraummesszug der Deutschen Bahn Railborn High-Speed Laserscanning Dr. Jürgen Meier 3. Hamburger Anwenderforum Terrestrisches Laser-Scanning Hamburg, 16.06.2009 Lichtraummessung Kenntnis
LIMEZ III Der neue Lichtraummesszug der Deutschen Bahn Railborn High-Speed Laserscanning Dr. Jürgen Meier 3. Hamburger Anwenderforum Terrestrisches Laser-Scanning Hamburg, 16.06.2009 Lichtraummessung Kenntnis
Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL
 DLR.de Folie 1 03.03.2015, ASW 2016, Wildau Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL DLR.de Folie 2 Agenda
DLR.de Folie 1 03.03.2015, ASW 2016, Wildau Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL DLR.de Folie 2 Agenda
GNSS in Geodäsie und Navigation
 GNSS in Geodäsie und Navigation Anwendungen und Beispiele aus dem Institut für Physikalische Geodäsie (IPGD) Stefan Leinen und Matthias Becker Hessische Auftakt-Veranstaltung European Satellite Navigation
GNSS in Geodäsie und Navigation Anwendungen und Beispiele aus dem Institut für Physikalische Geodäsie (IPGD) Stefan Leinen und Matthias Becker Hessische Auftakt-Veranstaltung European Satellite Navigation
Entwicklung, Kalibrierung und Evaluierung eines tragbaren direkt georeferenzierten Laserscanning Systems für kinematische Anwendungen
 Entwicklung, Kalibrierung und Evaluierung eines tragbaren direkt georeferenzierten Laserscanning Systems für kinematische Anwendungen Geodätische Woche 2015, Stuttgart Erik Heinz, Christian Eling, Lasse
Entwicklung, Kalibrierung und Evaluierung eines tragbaren direkt georeferenzierten Laserscanning Systems für kinematische Anwendungen Geodätische Woche 2015, Stuttgart Erik Heinz, Christian Eling, Lasse
Global Navigation meets Geoinformation April ESA/ESOC, Darmstadt
 28. April ESA/ESOC, Darmstadt Datenerfassung mit UAVs in Ergänzung der Fernerkundung für eine digitalisierte Welt Lothar Assenmacher, Aibotix GmbH, Kassel 1 Agenda Firmenprofil Allgemeine Grundlagen Aibot
28. April ESA/ESOC, Darmstadt Datenerfassung mit UAVs in Ergänzung der Fernerkundung für eine digitalisierte Welt Lothar Assenmacher, Aibotix GmbH, Kassel 1 Agenda Firmenprofil Allgemeine Grundlagen Aibot
Intelligente Transportsysteme
 Intelligente Transportsysteme Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz SS 2004 Michael Arnold Typen intelligenter Transportsysteme Fahrer-Assistenz-Systeme Mensch hat Kontrolle
Intelligente Transportsysteme Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz SS 2004 Michael Arnold Typen intelligenter Transportsysteme Fahrer-Assistenz-Systeme Mensch hat Kontrolle
Quadrocopters and it s Applications: Overview of State of the Art Techniques
 : Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
: Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
Mobiles Laserscanning für 3D-Stadtmodelle
 Workshop 3D-Stadtmodelle Mobiles Laserscanning für 3D-Stadtmodelle 8. und 9. November 2010 im Universitätsclub Bonn TopScan Gesellschaft zur Erfassung topographischer Information mbh Christian Wever Düsterbergstr.
Workshop 3D-Stadtmodelle Mobiles Laserscanning für 3D-Stadtmodelle 8. und 9. November 2010 im Universitätsclub Bonn TopScan Gesellschaft zur Erfassung topographischer Information mbh Christian Wever Düsterbergstr.
15 Jahre Erfahrung mit Laserscanning in der Praxis
 15 Jahre Erfahrung mit Laserscanning in der Praxis TopScan Gesellschaft zur Erfassung topographischer Information mbh Dr. Joachim Lindenberger Düsterbergstr. 5 48432 Rheine Germany info@topscan.de www.topscan.de
15 Jahre Erfahrung mit Laserscanning in der Praxis TopScan Gesellschaft zur Erfassung topographischer Information mbh Dr. Joachim Lindenberger Düsterbergstr. 5 48432 Rheine Germany info@topscan.de www.topscan.de
Amtliches 3D-Bild als neuer Geodatentyp für die Schweiz Vision und Studie
 Amtliches 3D-Bild als neuer Geodatentyp für die Schweiz Vision und Studie 3DGI 2017, 13. Juni 2017, FHNW Olten Prof. Dr. Stephan Nebiker Institut Vermessung und Geoinformation 3D-Bild als neuer Geodatentyp
Amtliches 3D-Bild als neuer Geodatentyp für die Schweiz Vision und Studie 3DGI 2017, 13. Juni 2017, FHNW Olten Prof. Dr. Stephan Nebiker Institut Vermessung und Geoinformation 3D-Bild als neuer Geodatentyp
Workshop. GPS-gestützte Objekterfassung und Vor-Ort-Updates für Kleinkataster. Dipl.-Ing (FH) Jörg Hepperle B. Eng.
 Jörg Hepperle B. Eng.") Workshop GPS-gestützte Objekterfassung und Vor-Ort-Updates für Kleinkataster Dipl.-Ing (FH) Jörg Hepperle B. Eng. Valerij Schwindt Prof. Dipl.-Ing. Rainer Kettemann Labor für Geoinformatik Hochschule für
Workshop GPS-gestützte Objekterfassung und Vor-Ort-Updates für Kleinkataster Dipl.-Ing (FH) Jörg Hepperle B. Eng. Valerij Schwindt Prof. Dipl.-Ing. Rainer Kettemann Labor für Geoinformatik Hochschule für
Verkehr und mehr
 GIS@Essen: Verkehr und mehr Dr. Ing. Christian Lindner, Leiter Abteilung Geoinformation Amt für Geoinformation, Vermessung und Kataster der Stadt Essen AGENDA (1) Einführung (2) GIS und Verkehr (3) Flugthermografie
GIS@Essen: Verkehr und mehr Dr. Ing. Christian Lindner, Leiter Abteilung Geoinformation Amt für Geoinformation, Vermessung und Kataster der Stadt Essen AGENDA (1) Einführung (2) GIS und Verkehr (3) Flugthermografie
Praktischer Nutzen und Potenziale von Punktwolken für kommunale Anwendungen. Rico Richter 8. Oktober 2016 Workshop 3D-Stadtmodelle
 Praktischer Nutzen und Potenziale von Punktwolken für kommunale Anwendungen Rico Richter 8. Oktober 2016 Workshop 3D-Stadtmodelle Hintergrund Hasso-Plattner-Institut (HPI): Fachgebiet Computergrafische
Praktischer Nutzen und Potenziale von Punktwolken für kommunale Anwendungen Rico Richter 8. Oktober 2016 Workshop 3D-Stadtmodelle Hintergrund Hasso-Plattner-Institut (HPI): Fachgebiet Computergrafische
Lichtschnittsensoren LPS / LES / LRS Die günstigere Lösung für viele neue Einsatzgebiete
 Lichtschnittsensoren LPS / LES / LRS Die günstigere Lösung für viele neue Einsatzgebiete PRODUKTINFORMATION Die sichere Objekterkennung muss jetzt keine Frage des Preises mehr sein. In vielen Einsatzbereichen
Lichtschnittsensoren LPS / LES / LRS Die günstigere Lösung für viele neue Einsatzgebiete PRODUKTINFORMATION Die sichere Objekterkennung muss jetzt keine Frage des Preises mehr sein. In vielen Einsatzbereichen
Datenerfassung mit Laserscanner und Kamera Anwendungen und Potenzial verschiedener Techniken in öffentlicher Verwaltung und Unternehmen
 Datenerfassung mit Laserscanner und Kamera Anwendungen und Potenzial verschiedener Techniken in öffentlicher Verwaltung und Unternehmen Andreas Steffens, 3DIS GmbH 15.05.2015 1 Firmenprofil 3DIS GmbH (3D
Datenerfassung mit Laserscanner und Kamera Anwendungen und Potenzial verschiedener Techniken in öffentlicher Verwaltung und Unternehmen Andreas Steffens, 3DIS GmbH 15.05.2015 1 Firmenprofil 3DIS GmbH (3D
Genauigkeitsanalyse der SAPOS
 Genauigkeitsanalyse der SAPOS -Dienste HEPS mit FKP und VRS im Vergleich zu ViGO von M. Bäumker, H. Horn, J. Schröder 3. SAPOS -Nutzerforum 2004 Köln, Düsseldorf, Arnsberg, Detmold, Münster,, 27.9.-1.10.
Genauigkeitsanalyse der SAPOS -Dienste HEPS mit FKP und VRS im Vergleich zu ViGO von M. Bäumker, H. Horn, J. Schröder 3. SAPOS -Nutzerforum 2004 Köln, Düsseldorf, Arnsberg, Detmold, Münster,, 27.9.-1.10.
Handgeführtes BIM-Aufmaßsystem- Untersuchung des Potentials eines mobilen low-cost Gerätes zur Erzeugung von 3D-Modellen
 - Untersuchung des Potentials eines mobilen low-cost Gerätes zur Erzeugung von 3D-Modellen Rebecca Achenbach Forum Bauinformatik 2017 07.09.2017 Zielsetzung & Vorgehensweise Bewertung des Google Tango
- Untersuchung des Potentials eines mobilen low-cost Gerätes zur Erzeugung von 3D-Modellen Rebecca Achenbach Forum Bauinformatik 2017 07.09.2017 Zielsetzung & Vorgehensweise Bewertung des Google Tango
Rückblick : Terrestrisches Laserscanning Rektoratsgebäude
 0. Projektkoordination 1. Registrierung (automatisch, interaktiv) Tiltmounts berücksichtigen Standpunktmatrix (Anzahl Punkte, Standardabweichung,...) 2. Kolorieren der Punktwolke Neuberechnen der inneren
0. Projektkoordination 1. Registrierung (automatisch, interaktiv) Tiltmounts berücksichtigen Standpunktmatrix (Anzahl Punkte, Standardabweichung,...) 2. Kolorieren der Punktwolke Neuberechnen der inneren
Die Gründer von Skyability
 Die Gründer von Skyability Team aus Experten Studium TU Wien - Maschinenbau Technischer Trainer im Anlagenbau F&E - Konstruktion von Formel 1 Antrieben Studium der Energietechnik Studium nachhaltige Energiesysteme
Die Gründer von Skyability Team aus Experten Studium TU Wien - Maschinenbau Technischer Trainer im Anlagenbau F&E - Konstruktion von Formel 1 Antrieben Studium der Energietechnik Studium nachhaltige Energiesysteme
UAV Mapping Drohnenvermessung im Infrastrukturbau
 UAV Mapping Drohnenvermessung im Infrastrukturbau SWISSBAU FOCUS / 19.01.2018 Vortrag Inhalt þ Vorstellung Schällibaum AG þ Erfassung und Bereitstellung þ þ Drei Referenzbeispiele þ Erhaltungsprojekt Schöllenen
UAV Mapping Drohnenvermessung im Infrastrukturbau SWISSBAU FOCUS / 19.01.2018 Vortrag Inhalt þ Vorstellung Schällibaum AG þ Erfassung und Bereitstellung þ þ Drei Referenzbeispiele þ Erhaltungsprojekt Schöllenen
Deflektometrie Ein Messverfahren für spiegelnde Oberflächen
 Deflektometrie Ein Messverfahren für spiegelnde Oberflächen Dr. Alexander Zimmermann FORWISS Universität Passau Institut für Softwaresysteme in technischen Anwendungen der Informatik 19. Oktober 2017 Gliederung
Deflektometrie Ein Messverfahren für spiegelnde Oberflächen Dr. Alexander Zimmermann FORWISS Universität Passau Institut für Softwaresysteme in technischen Anwendungen der Informatik 19. Oktober 2017 Gliederung
GPS - Aktueller Stand und künftige Potentiale
 armasuisse Bundesamt für Landestopografie swisstopo Bereich GPS - Aktueller Stand und künftige Potentiale Informationstagung Landtechnik 2009 13. Oktober 2009, Tänikon U. Wild Agenda Satellitensysteme
armasuisse Bundesamt für Landestopografie swisstopo Bereich GPS - Aktueller Stand und künftige Potentiale Informationstagung Landtechnik 2009 13. Oktober 2009, Tänikon U. Wild Agenda Satellitensysteme
Eingabegeräte. für Virtuelle Präsenz. Mark Poguntke 1 / 24. Proseminar Virtuelle Präsenz SS 2005 Universität Ulm
 Eingabegeräte für Virtuelle Präsenz Mark Poguntke mp17@informatik.uni-ulm.de Proseminar Virtuelle Präsenz SS 2005 Universität Ulm 1 / 24 Themenübersicht 1. Interaktion in virtuellen Welten 2. Verschiedene
Eingabegeräte für Virtuelle Präsenz Mark Poguntke mp17@informatik.uni-ulm.de Proseminar Virtuelle Präsenz SS 2005 Universität Ulm 1 / 24 Themenübersicht 1. Interaktion in virtuellen Welten 2. Verschiedene
Zustandserfassung & Werterhalt kommunaler Straßen
 Zustandserfassung & Werterhalt kommunaler Straßen Vortrag: Bestandsdatenerfassung - Datenfortführung Wuppertal, 03. Juli 2013 Dipl. Geogr. Dieter Gabriel Dipl.-Geogr. Dieter Gabriel Bestandsdatenerfassung
Zustandserfassung & Werterhalt kommunaler Straßen Vortrag: Bestandsdatenerfassung - Datenfortführung Wuppertal, 03. Juli 2013 Dipl. Geogr. Dieter Gabriel Dipl.-Geogr. Dieter Gabriel Bestandsdatenerfassung
Einsatz fahrzeug- und helikopter gestützter Messsysteme für die Erfassung von Straßenbestandsdaten
 Einsatz fahrzeug- und helikopter gestützter Messsysteme für die Erfassung von Straßenbestandsdaten Robert Hau; Nebel & Partner Mobile Mapping 2013 Geodaten für die Mobilität der Zukunft 19. Juni 2013,
Einsatz fahrzeug- und helikopter gestützter Messsysteme für die Erfassung von Straßenbestandsdaten Robert Hau; Nebel & Partner Mobile Mapping 2013 Geodaten für die Mobilität der Zukunft 19. Juni 2013,
Fortführung und Aktualisierung von Bestandsdaten
 Kolloquium Straßenmanagement Fortführung und Aktualisierung von Bestandsdaten 12. März 2013 Technische Universität Dresden Michael Heber Inhalte Analyse vorhandener Straßendaten Aktualisierung von Messbildern
Kolloquium Straßenmanagement Fortführung und Aktualisierung von Bestandsdaten 12. März 2013 Technische Universität Dresden Michael Heber Inhalte Analyse vorhandener Straßendaten Aktualisierung von Messbildern
Sicherungspolitik GEOSOFT. Autor: Michael Schulz, GEO
 Nur die Satelliten vom Typ Block I standen jedem Nutzer mit voller Systemgenauigkeit zur Verfügung. Durch künstliche Systemverschlechterung gestattet der Systembetreiber dem nicht autorisiertem Nutzer
Nur die Satelliten vom Typ Block I standen jedem Nutzer mit voller Systemgenauigkeit zur Verfügung. Durch künstliche Systemverschlechterung gestattet der Systembetreiber dem nicht autorisiertem Nutzer
DPAPro und DPAInspect
 DPAPro und DPAInspect Mobile 3D Industriemesssysteme VORSPRUNG IST MESSBAR DPAPro und DPAInspect Mobile 3D Industriemesssysteme Die industrielle 3D-Messtechnik Die industrielle 3D-Messtechnik ist elementarer
DPAPro und DPAInspect Mobile 3D Industriemesssysteme VORSPRUNG IST MESSBAR DPAPro und DPAInspect Mobile 3D Industriemesssysteme Die industrielle 3D-Messtechnik Die industrielle 3D-Messtechnik ist elementarer
Aufnahmeverfahren zur 3D-Modellierung von Stauanlagen. Masterarbeit HS 2011 Amanda Zwicky
 Aufnahmeverfahren zur 3D-Modellierung von Stauanlagen Masterarbeit HS 2011 Amanda Zwicky Aufgabenstellung Bisher punktuelle Bestimmung von Verschiebungen an Staumauern Zusammenarbeit mit axpo (Herr U.
Aufnahmeverfahren zur 3D-Modellierung von Stauanlagen Masterarbeit HS 2011 Amanda Zwicky Aufgabenstellung Bisher punktuelle Bestimmung von Verschiebungen an Staumauern Zusammenarbeit mit axpo (Herr U.
UAV/Drohne. Kompetenzen/Referenzen. Stand Donatsch + Partner AG. Prättigauerstrasse 34 CH Landquart
 UAV/Drohne Kompetenzen/Referenzen Stand 19.02.2016 Donatsch + Partner AG Prättigauerstrasse 34 CH -7302 Landquart +41 81 307 89 00 landquart@donatsch.ch 1 Vermessung aus der Luft Wir bieten nun seit 3
UAV/Drohne Kompetenzen/Referenzen Stand 19.02.2016 Donatsch + Partner AG Prättigauerstrasse 34 CH -7302 Landquart +41 81 307 89 00 landquart@donatsch.ch 1 Vermessung aus der Luft Wir bieten nun seit 3
Auswertung von flugzeuggestützten GPS- Messungen für die Anwendung in der Fluggravimetrie
 Auswertung von flugzeuggestützten GPS- Messungen für die Anwendung in der Fluggravimetrie S. Balssen, U. Meyer, I. Heyde, C. Knöfel, M. Fritsche, R. Dietrich, M. Scheinert Geodätische Woche 2010 Köln,
Auswertung von flugzeuggestützten GPS- Messungen für die Anwendung in der Fluggravimetrie S. Balssen, U. Meyer, I. Heyde, C. Knöfel, M. Fritsche, R. Dietrich, M. Scheinert Geodätische Woche 2010 Köln,
Herzlich Willkommen. Monika Hentschinski und Harry Wirth Referat Geodäsie (M5) Bundesanstalt für Gewässerkunde, Koblenz
 Bundesanstalt für Gewässerkunde, Koblenz") Herzlich Willkommen Monika Hentschinski und Harry Wirth Referat Geodäsie (M5) Bundesanstalt für Gewässerkunde, Koblenz Geodätische Woche Nürnberg, 27. - 29.09. 2011 Navigation mit GNSS und INS in der Hydrographie
Herzlich Willkommen Monika Hentschinski und Harry Wirth Referat Geodäsie (M5) Bundesanstalt für Gewässerkunde, Koblenz Geodätische Woche Nürnberg, 27. - 29.09. 2011 Navigation mit GNSS und INS in der Hydrographie
Künstliche Intelligenz zur automatisierten Erkennung von Fahrbahnschäden aus LiDAR Daten
 Künstliche Intelligenz zur automatisierten Erkennung von Fahrbahnschäden aus LiDAR Daten Kurzvorstellung Technologie: Mobile Laserscanning Datenanalyse: autom. Erkennung von Straßenschäden Zusammenfassung
Künstliche Intelligenz zur automatisierten Erkennung von Fahrbahnschäden aus LiDAR Daten Kurzvorstellung Technologie: Mobile Laserscanning Datenanalyse: autom. Erkennung von Straßenschäden Zusammenfassung
Effiziente, berührungslose Erfassung der Gleisinfrastrukturobjekte
 Effiziente, berührungslose Erfassung der Gleisinfrastrukturobjekte Ein aktuelles Forschungsprojekt der ÖBB-Infrastruktur AG, ÖBB-Infrastruktur AG, Stab Forschung&Entwicklung 55 2 XXXX22 Organigramm ÖBB-Konzern
Effiziente, berührungslose Erfassung der Gleisinfrastrukturobjekte Ein aktuelles Forschungsprojekt der ÖBB-Infrastruktur AG, ÖBB-Infrastruktur AG, Stab Forschung&Entwicklung 55 2 XXXX22 Organigramm ÖBB-Konzern
Susanne Haußmann. Aerotriangulation eines Bildverbandes des Stuttgarter Adlers
 Susanne Haußmann Aerotriangulation eines Bildverbandes des Stuttgarter Adlers Dauer der Arbeit: 3 Monate Abschluss: Juli 2010 Betreuer: Dr.-Ing. Michael Cramer (ifp), Dipl.-Ing. Ursula Kirchgäßner (IRS)
Susanne Haußmann Aerotriangulation eines Bildverbandes des Stuttgarter Adlers Dauer der Arbeit: 3 Monate Abschluss: Juli 2010 Betreuer: Dr.-Ing. Michael Cramer (ifp), Dipl.-Ing. Ursula Kirchgäßner (IRS)
GNSS/IMU Integration für die präzise Bestimmung einer Flugtrajektorie
 GNSS/IMU Integration für die präzise Bestimmung einer Flugtrajektorie Fabian Hinterberger Institut für Geodäsie und Geophysik, Tu Wien 18. Nov. 2011 1 Motivation Motivation Gegenüberstellung Eigenschaften
GNSS/IMU Integration für die präzise Bestimmung einer Flugtrajektorie Fabian Hinterberger Institut für Geodäsie und Geophysik, Tu Wien 18. Nov. 2011 1 Motivation Motivation Gegenüberstellung Eigenschaften
A R R P A Erfassung, 4D-Modellierung und statistische Auswertung des Zustands von Strassenbelägen
 Erfassung, 4D-Modellierung und statistische Auswertung des Zustands von Strassenbelägen 3DGI, Olten, 13 Juni 2017 Gildas Allaz Auscultation de Revêtements Routiers par Photogrammétrie Automatisée (Zustandsbeurteilung
Erfassung, 4D-Modellierung und statistische Auswertung des Zustands von Strassenbelägen 3DGI, Olten, 13 Juni 2017 Gildas Allaz Auscultation de Revêtements Routiers par Photogrammétrie Automatisée (Zustandsbeurteilung
Inhalte. HS BO Lab. für Photogrammetrie: Orientierungsverfahren in der Stereoauswertung 1
 Inhalte Bildflug Bildflugplanung Navigation (Einsatzmöglichkeiten von GPS und Inertialsystemen) Zweibildauswertung Grundlagen Stereoskopisches Sehen und Messen Stereoauswertesysteme Orientierungsverfahren
Inhalte Bildflug Bildflugplanung Navigation (Einsatzmöglichkeiten von GPS und Inertialsystemen) Zweibildauswertung Grundlagen Stereoskopisches Sehen und Messen Stereoauswertesysteme Orientierungsverfahren
Projekt KanU Kataster nach UTM
 Projekt KanU Kataster nach UTM Umstellung des Liegenschaftskatasters Gliederung 1. Geodaten 2. UTM-Umstellung 3. Projekt KanU 4. Zusammenfassung 2 Geodaten Entwicklungen Flächendeckende, grenzüberschreitende
Projekt KanU Kataster nach UTM Umstellung des Liegenschaftskatasters Gliederung 1. Geodaten 2. UTM-Umstellung 3. Projekt KanU 4. Zusammenfassung 2 Geodaten Entwicklungen Flächendeckende, grenzüberschreitende
Neue Entwicklungen in der GNSS Technik
 Neue Entwicklungen in der GNSS Technik SONDIERUNG VERMESSUNG ABSTECKUNG ili gis-services Hersteller-unabhängiges Ingenieurbüro seit über 15 Jahren Maßgeschneiderte Hard- und Softwarekombinationen namhafter
Neue Entwicklungen in der GNSS Technik SONDIERUNG VERMESSUNG ABSTECKUNG ili gis-services Hersteller-unabhängiges Ingenieurbüro seit über 15 Jahren Maßgeschneiderte Hard- und Softwarekombinationen namhafter
3D - Oberflächenmodelle
 3D - Oberflächenmodelle Daten des GeoSN als Grundlage zur Erschließung des Solarpotentials Staatsbetrieb Geobasisinformation und Vermessung Sachsen Agenda Luftbildservice des Freistaates Sachsen Daten
3D - Oberflächenmodelle Daten des GeoSN als Grundlage zur Erschließung des Solarpotentials Staatsbetrieb Geobasisinformation und Vermessung Sachsen Agenda Luftbildservice des Freistaates Sachsen Daten
Abteilung 3 - Vermessung
 Abteilung 3 - Vermessung Zentrale Dienstleistungen für den Konzern der Stadt Essen im Wandel von, Essen Vortrag zum Besuch des VDV Bezirks Essen am 11. September 2015 im Deutschlandhaus Aufgabenbereiche
Abteilung 3 - Vermessung Zentrale Dienstleistungen für den Konzern der Stadt Essen im Wandel von, Essen Vortrag zum Besuch des VDV Bezirks Essen am 11. September 2015 im Deutschlandhaus Aufgabenbereiche
RPAS im operationellen Einsatz beim LGL Baden-Württemberg 3D-Dokumentation von Hangrutschungen
 1 Institut für Photogrammetrie RPAS im operationellen Einsatz beim LGL Baden-Württemberg 3D-Dokumentation von Hangrutschungen Michael Cramer LGL Forum Gelsenkirchen, 4.-5. Juni 2014 Geportal Baden-Württemberg
1 Institut für Photogrammetrie RPAS im operationellen Einsatz beim LGL Baden-Württemberg 3D-Dokumentation von Hangrutschungen Michael Cramer LGL Forum Gelsenkirchen, 4.-5. Juni 2014 Geportal Baden-Württemberg
Modelle und Systeme von Geodaten
 Modelle und Systeme von Geodaten Digitale Geländemodelle V/Ü: Kartographische Informationsverarbeitung Beschreibung der Geländeoberfläche Die Geländeoberfläche (Reliefoberfläche) wird beschrieben durch
Modelle und Systeme von Geodaten Digitale Geländemodelle V/Ü: Kartographische Informationsverarbeitung Beschreibung der Geländeoberfläche Die Geländeoberfläche (Reliefoberfläche) wird beschrieben durch
3D-BILDVERARBEITUNG VON DER PROBLEMSTELLUNG ZUM ERGEBNIS MAURICE LINGENFELDER, ENTWICKLUNG BILDVERARBEITUNG, STEMMER IMAGING
 3D-BILDVERARBEITUNG VON DER PROBLEMSTELLUNG ZUM ERGEBNIS MAURICE LINGENFELDER, ENTWICKLUNG BILDVERARBEITUNG, STEMMER IMAGING WARUM 3D-BILDVERARBEITUNG? Freiformflächen mit undefinierten Fehlern Tiefe des
3D-BILDVERARBEITUNG VON DER PROBLEMSTELLUNG ZUM ERGEBNIS MAURICE LINGENFELDER, ENTWICKLUNG BILDVERARBEITUNG, STEMMER IMAGING WARUM 3D-BILDVERARBEITUNG? Freiformflächen mit undefinierten Fehlern Tiefe des
Mobile Anwendungen für GNSS-Positionierung und GIS
 Mobile Anwendungen für GNSS-Positionierung und GIS Michael Schulz ALLSAT GmbH, Hannover Mobile Anwendungen für GNSS-Positionierung und GIS 1. Aktuelle Konfiguration 2. Zukünftige Entwicklungen 3. Anwendungsbeispiele
Mobile Anwendungen für GNSS-Positionierung und GIS Michael Schulz ALLSAT GmbH, Hannover Mobile Anwendungen für GNSS-Positionierung und GIS 1. Aktuelle Konfiguration 2. Zukünftige Entwicklungen 3. Anwendungsbeispiele
Cycloramas Nutzen und Mehrwerte für die Stadt Frankfurt am Main
 Cycloramas Nutzen und Mehrwerte für die Stadt Frankfurt am Main Inhaltsübersicht Kurzüberblick Unternehmen CycloMedia Dienstleistungen CycloMedia Aufnahmeprinzip Messprinzip Globespotter Integrationen
Cycloramas Nutzen und Mehrwerte für die Stadt Frankfurt am Main Inhaltsübersicht Kurzüberblick Unternehmen CycloMedia Dienstleistungen CycloMedia Aufnahmeprinzip Messprinzip Globespotter Integrationen
Kooperative Beschaffung von spezifischen Geobasisdaten Landesamt für Geoinformation und Landentwicklung Niedersachsen 1
 07.07.2011 Landesamt für Geoinformation und Landentwicklung Niedersachsen 1 Gemeinsam für starke Regionen Aussagekräftige Solarpotenzialanalysen, detaillierte 3D Stadtmodelle, regionaler Hochwasserschutz
07.07.2011 Landesamt für Geoinformation und Landentwicklung Niedersachsen 1 Gemeinsam für starke Regionen Aussagekräftige Solarpotenzialanalysen, detaillierte 3D Stadtmodelle, regionaler Hochwasserschutz
Werkzeuge für die Einzelpunkt- und Massendatenerfassung im Esri-Workflow
 Werkzeuge für die Einzelpunkt- und Massendatenerfassung im Esri-Workflow Siegfried Wanjek, AllTerra Deutschland GmbH Agenda Firmenvorstellung Einzelpunkterfassung Feld-Software und ArcGIS-Plugin im Workflow
Werkzeuge für die Einzelpunkt- und Massendatenerfassung im Esri-Workflow Siegfried Wanjek, AllTerra Deutschland GmbH Agenda Firmenvorstellung Einzelpunkterfassung Feld-Software und ArcGIS-Plugin im Workflow
Weltweit führend in Tunnelsprengtechnik und Gleisgeometrie. Stefan Basler, Leiter Vertrieb
 Weltweit führend in Tunnelsprengtechnik und Gleisgeometrie Stefan Basler, Leiter Vertrieb Was ist Gleisgeometrie Typische Parameter und Messinstrumente Spurweite Überhöhung Stationierung Verwindung Krümmung
Weltweit führend in Tunnelsprengtechnik und Gleisgeometrie Stefan Basler, Leiter Vertrieb Was ist Gleisgeometrie Typische Parameter und Messinstrumente Spurweite Überhöhung Stationierung Verwindung Krümmung
Mobile Stereobild basierte 3D Infrastrukturerfassung
 Mobile Stereobild basierte 3D Infrastrukturerfassung und verwaltung 4. Hamburger Anwenderforum Terrestrisches Laserscanning 23. Juni 2011, Hamburg Hannes Eugster inovitas AG Mobile Mapping Solutions Gründenstrasse
Mobile Stereobild basierte 3D Infrastrukturerfassung und verwaltung 4. Hamburger Anwenderforum Terrestrisches Laserscanning 23. Juni 2011, Hamburg Hannes Eugster inovitas AG Mobile Mapping Solutions Gründenstrasse
UNI Duisburg-Essen FB11 Photogrammetrie-Klausur Teil Matrikel-Nr.:
 1. Nennen Sie je 2 typische Anwendungen aus den Bereichen (6 Punkte) a. Nahbereichsphotogrammetrie b. Luftbildphotogrammetrie c. Fernerkundung 2. Nennen Sie je 2 typische Sensoren aus den Bereichen (6
1. Nennen Sie je 2 typische Anwendungen aus den Bereichen (6 Punkte) a. Nahbereichsphotogrammetrie b. Luftbildphotogrammetrie c. Fernerkundung 2. Nennen Sie je 2 typische Sensoren aus den Bereichen (6
Leica Geo Office mehr als Sie erwarten GEOMATIK-News 27. November 2008
 Leica Geo Office mehr als Sie erwarten GEOMATIK-News 27. November 2008 Schnellster Start - Ziel Arbeitsablauf Power Geringer Laser Lot Management Platzbedarf Konzept PinPoint Technologie Quick Coding Kundensupport
Leica Geo Office mehr als Sie erwarten GEOMATIK-News 27. November 2008 Schnellster Start - Ziel Arbeitsablauf Power Geringer Laser Lot Management Platzbedarf Konzept PinPoint Technologie Quick Coding Kundensupport
Zur Georeferenzierung von UAV Bildflügen: direkt oder indirekt, was braucht man dafür? Lasse Klingbeil Christian Eling Heiner Kuhlmann
 Zur Georeferenzierung von UAV Bildflügen: direkt oder indirekt, was braucht man dafür? Lasse Klingbeil Christian Eling Heiner Kuhlmann Institut für Geodäsie und Geoinformation Rheinische Friedrich-Wilhelms-Universität
Zur Georeferenzierung von UAV Bildflügen: direkt oder indirekt, was braucht man dafür? Lasse Klingbeil Christian Eling Heiner Kuhlmann Institut für Geodäsie und Geoinformation Rheinische Friedrich-Wilhelms-Universität
GIS Einführungsschulung
 Datentypen 1. Rasterdaten Datenquellen: Gescannte analoge Karten und Pläne Digitale Kameras Framegrabber Satellitenaufnahmen (Scanner und optische Sensoren) Datentypen: binär (Synonyme: 1-Bit, Schwarz-weiß)
Datentypen 1. Rasterdaten Datenquellen: Gescannte analoge Karten und Pläne Digitale Kameras Framegrabber Satellitenaufnahmen (Scanner und optische Sensoren) Datentypen: binär (Synonyme: 1-Bit, Schwarz-weiß)