Lego Mindstorms. Diverse Übungen. Autor: Franz Philipp Website:
|
|
|
- Christa Kuntz
- vor 7 Jahren
- Abrufe
Transkript
1 Lego Mindstorms Diverse Übungen Autor: Franz Philipp Website:
2 Übersicht Sensoren Übung 1 (Sensoren kennenlernen) Übersicht NXT-Menü... 3 Übung 2 (Programme mit dem NXT schreiben)... 5 Übung 3 (Mit Drehsensor vorwärts fahren)... 6 Übung 4 (Geradeaus fahren)... 9 Übung 5 (Entscheidungen) Übung 6 (Wiederholungen) Übung 7 (Lichtsensor einsetzen) Übung 8 (Umgebungslicht korrigieren) Übung 9 (Datenerfassung, nur mit Robolab) Übung 10 (Einer schwarzen Linie nachfahren) Übung 11 (Fernsteuerung mit Bluetooth)... 23
3 Übersicht Sensoren 1
4 Übung 1 (Sensoren kennenlernen) Thema Zeitbedarf Software Voraussetzung Hilfe Sensoren kennenlernen ca. 45 Minuten keine Software notwendig NXT, Motor und Sensoren Dokumente über Sensoren und Motor (Lehrperson fragen) und «Übersicht NXT Menü» auf den nächsten Seiten. Beispiel Testen Sie die Distanzmessung des Drehsensors (im Motor eingebaut). Schliessen Sie einen Motor an einen Ausgang des NXTs an. Wählen Sie in der Anzeige des NXT-Displays «View». 1. Wählen Sie das Symbol «Motor rotations» aus. 2. Wählen Sie den Port aus, an den der Motor angeschlossen ist. Montieren Sie nun ein Rad an den Motor. Messen Sie die Anzahl der Umdrehungen, während Sie das Rad über den Boden rollen. Aufträge 1. Wählen Sie das Symbol «Motor degrees» aus. Worin besteht der Unterschied zum Symbol «Motor rotations»? 2. Was passiert, wenn Sie die Rollrichtung ändern? 3. Rollen Sie mit beiden Funktionen möglichst genau einen Meter ab. Berechnen Sie aus der Anzeige und der Distanz den Durchmesser des Rades. Kontrollieren Sie Ihre Berechnung! 4. Welche Funktion würden Sie für die Distanzmessung bevorzugen? 5. Testen Sie die anderen Sensoren sorgfältig aus! Hinweis: Wenn ein Stern (*) hinter dem Sensornamen steht, handelt es sich um einen Sensor, der nicht im Standardset (9797) vorhanden ist. 6. Unter dem Menü «Try Me» können ebenfalls Sensoren getestet werden. Schliessen Sie einen oder zwei Motoren an die Ausgänge B bzw. C an. Danach starten Sie «Try-Sound». 2

5 Übersicht NXT-Menü 3
6 4
7 Übung 2 (Programme mit dem NXT schreiben) Thema Zeitbedarf Software Voraussetzung Hilfe Programme mit dem NXT schreiben und NXT Menüs kennen lernen ohne Konstruktion ca. 30 Minuten keine Software notwendig Fahrzeug mit 2 Motoren (B linker Motor und C rechter Motor) Dokument «NXT-Hauptmenü.pdf» (Lehrperson fragen) Beispiel Befestigen Sie den Ultraschallsensor auf dem Fahrzeug. Erstellen Sie das folgende Programm unter NXT Program: 1. Speichern Sie das Programm ab. 2. Laden Sie das Programm unter «My Files/NXT files» und testen Sie seine Funktion. Aufträge 1. Ändern Sie das Programm wie folgt ab: Sobald der Ultraschallsensor ein Hindernis erkennt, fährt das Fahrzeug für 2 Sekunden rückwärts. Danach wird der Vorgang wiederholt. 2. Erstellen Sie folgendes Programm: Hauptprogramm Vorwärtsfahren Schalter gedrückt? Rückwärtsfahren Schalter gedrückt? 3. Probieren Sie eigene Programme mit verschiedenen Sensoren aus. 5
8 Übung 3 (Mit Drehsensor vorwärts fahren) Thema Zeitbedarf Software Voraussetzung Hilfe Motor A soll genau zwei Umdrehungen vorwärts fahren ca. 50 Minuten Robolab oder NXT-G NXT mit 1 Motor (grosses Rad an der Motorachse befestigen) Eingebaute Hilfe in den entsprechenden Programmen! Flussdiagramm Start Motor A vorwärts einschalten Umdrehungen A = 720 Die NXT-Motoren verfügen über einen eingebauten Drehsensor. Dieser Sensor misst die Motorumdrehungen in Grad (Genauigkeit +/ 1 Grad). Die Drehsensoren ermöglichen präzise Roboterbewegungen. Motor A stoppen Ende Beispiel Robolab Erstellen Sie das entsprechende Programm mit Robolab: Beispiel NXT-G Erstellen Sie das entsprechende Programm mit NXT-G: Hinweis Die Entscheidung «Umdrehung A = 720» und die Wiederholung bis die gewünschte Umdrehung erreicht ist, ist in den entsprechenden «Wait-Blöcken» hinterlegt! 6
9 Aufträge 1. Starten Sie das Programm und kontrollieren Sie die Genauigkeit der Drehbewegung. 2. Erhöhen Sie die Motorleistung schrittweise (z. B. in 5 Stufen) und kontrollieren Sie erneut die Genauigkeit der Drehbewegung. 3. Gilt nur für Robolab: Tauschen Sie im Programm den Befehl «NXT Wait for Rotation» mit dem Befehl «NXT Wait for Location» aus: «NXT Wait for Rotation» «NXT Wait for Location» 4. Gilt nur für NXT-G: Tauschen Sie im Programm den Befehl «Stop» mit dem Befehl «Motor». Stellen Sie die Richtung beim «Motor» auf Stopp. Unter «Nächste Aktion:» muss «Bremsen» aktiviert sein. «Stop» «Motor, mit Richtung auf Stopp» 5. Laden Sie das geänderte Programm auf den NXT und kontrollieren Sie die Genauigkeit der Drehbewegung mit verschiedenen Motorleistungen. Speichern Sie das Programm «Vorwärts» ab. 6. Ändern Sie das Programm nun wie folgt ab: Der Motor A soll genau zwei Umdrehungen rückwärts fahren. Speichern Sie das Programm «Rückwärts» ab. Kontrollieren Sie die Drehbewegung. 7. Kopieren Sie die beiden Programmteile «Vorwärts» bzw. «Rückwärts» so zusammen, dass der Motor zuerst zwei Umdrehungen vorwärts und anschliessend wieder zwei Umdrehungen rückwärts fährt. Speichern Sie das Programm unter «Gemeinsam» ab. Kontrollieren Sie die Drehbewegung. Stimmt die Bewegung mit Ihrer Erwartung überein? Falls nicht, suchen Sie eine Lösung! 8. Ändern Sie das Programm so ab, dass die Motorleistung der beiden Motorblöcke an einer Stelle geändert werden kann. Vorgehen Robolab (entspricht nicht Lösung von Punkt 7): 7 7
10 Vorgehen NXT-G (entspricht nicht Lösung von Punkt 7): Zuerst unter dem Menüpunkt «Bearbeiten» «Variablen definieren» anklicken. Erstellen Sie eine Variable mit Namen «Power». Das Datenformat auf «Zahl» einstellen. Im Programm muss der gewünschte Wert der Variablen (Koffer) zuerst zugewiesen werden. Danach kann der Wert (Inhalt des Koffers) den Motorblöcken zugewiesen werden (über sogenannte Datenleitungen). 8
11 Übung 4 (Geradeaus fahren) Thema Zeitbedarf Software Voraussetzung Hilfe Mit zwei Motoren vorwärts fahren ca. 30 Minuten Robolab oder NXT-G Fahrzeug mit 2 Motoren (B linker Motor und C rechter Motor) Eingebaute Hilfe in den entsprechenden Programmen! Flussdiagramm Start Motor B vorwärts einschalten Motor C vorwärts einschalten Die Entscheidung «warten >= 3 Sekunden» und die Wiederholung bis die gewünschte Wartezeit erreicht ist, ist in den entsprechenden «Wait-Blöcken» hinterlegt! warten >= 3 Sekunden Motor B stoppen Motor C stoppen Ende Beispiel Robolab Erstellen Sie das entsprechende Programm mit Robolab: Beispiel NXT-G Erstellen Sie das entsprechende Programm mit NXT-G: Hinweis Die Programme funktionieren auch ohne das ausdrückliche Stoppen der Motoren. Für eine sorgfältige Programmierung ist das Stoppen aber erforderlich. Bei NXT-G könnte die Zeit auch bei den Motoreigenschaften eingestellt werden. 9
12 Aufträge 1. Starten Sie das Programm und überprüfen Sie die Abweichung beim Geradeausfahren. Messen Sie die «vertikale Abweichung» während der Fahrt. 2. Weshalb fährt das Fahrzeug nicht korrekt geradeaus? 3. Gilt nur für Robolab: Mit dem Befehl «NXT Synch Motor Control» können zwei Motoren elektronisch geregelt werden. Ein Motor wird als «Master» eingesetzt und der zweite Motor («Slave») versucht möglichst genau dem «Master» zu folgen. Schalten Sie die beiden Motoren so, dass die Bewegungen synchron ablaufen. Tipp: Benutzen Sie die eingebaute Hilfe! «NXT Synch Motor Control» 4. Gilt nur für f NXT-G: Ersetzen Sie die beiden Motorblöcke B bzw. C mit einem Bewegungsblock (beim Ein- und Ausschalten): «Motorblöcke B und C» «Bewegungsblock» 5. Laden Sie das geänderte Programm auf den NXT. Überprüfen Sie erneut die Abweichung beim Geradeausfahren. Vergleichen Sie die Abweichung mit der ersten Variante. Speichern Sie das Programm unter «Bewegung». 10
13 Übung 5 (Entscheidungen) Thema Zeitbedarf Software Voraussetzung Hilfe Entscheidungen ca. 30 Minuten Robolab oder NXT-G NXT mit 2 Motoren (B linker Motor und C rechter Motor) und einem Tastsensor auf Eingang 1 Eingebaute Hilfe in den entsprechenden Programmen! Flussdiagramm Start 3 Sekunden warten Taste 1 gedrückt? Motor B starten Motor C starten 3 Sekunden warten Motoren B und C stoppen Ende Beispiel Robolab Erstellen Sie das entsprechende Programm mit Robolab: Tipp: Sie finden die «Entscheidungen» unter «Structures»/«Forks». Das «Zusammenführen» der Gabel ist immer notwendig: «Structures» «Forks» «Zusammenführen» 11
14 Beispiel NXT-G Erstellen Sie das entsprechende Programm mit NXT-G: Aufträge 1. Variante Schalter nicht betätigt,, überlegen Sie zuerst: Was passiert, wenn Sie das Programm starten ohne dass der Schalter gedrückt wird? Starten Sie nun das Programm und kontrollieren Sie durch Ausprobieren, ob Ihre Überlegung korrekt war! 2. Variante Schalter von Anfang an betätigt, überlegen Sie zuerst erst: Was passiert, wenn Sie das Programm starten und der Schalter von Beginn an gedrückt wird? Starten Sie nun das Programm und kontrollieren Sie durch Ausprobieren, ob Ihre Überlegung korrekt war! 3. Variante Schalter am Anfang dreimal nacheinander kurz drücken (ganz schnell), überlegen Sie zuerst: Starten Sie nun das Programm und kontrollieren Sie durch Ausprobieren, ob Ihre Überlegung korrekt war! 4. Speichern Sie das Programm unter «Übung 5» ab. 12
15 Übung 6 (Wiederholungen) Thema Zeitbedarf Software Voraussetzung Hilfe Wiederholungen ca. 30 Minuten Robolab oder NXT-G NXT mit 2 Motoren (B linker Motor und C rechter Motor) und einem Tastsensor auf Eingang 1. Tipp: Das Programm von Übung 5 kann abgeändert werden! Eingebaute Hilfe in den entsprechenden Programmen! Flussdiagramm Start 3 Sekunden warten Taste 1 gedrückt? Motor B starten Motor C starten 3 Sekunden warten Motoren B und C stoppen Beispiel Robolab Erstellen Sie das entsprechende Programm mit Robolab: Tipp: Sie finden die «Wiederholungen» unter «Structures»/«Loops». Das «Ende» der Wiederholung ist immer notwendig: «Structures» «Loops» «Ende Endlosloop» 13
16 Beispiel NXT-G Erstellen Sie das entsprechende Programm mit NXT-G: Aufträge 1. Wann müssen Sie den Schalter spätestens drücken, damit das Programm auf den Schalter reagiert? Überlegen Sie zuerst! Starten Sie nun das Programm und kontrollieren Sie durch Ausprobieren, ob Ihre Überlegung korrekt war! 2. Löschen Sie die erste Wartezeit. Wie wird das Programm nun reagieren? Überlegen Sie zuerst! Starten Sie nun das Programm und kontrollieren Sie durch Ausprobieren, ob Ihre Überlegung korrekt war! 3. Fügen Sie nach dem letzten Motorstopp eine Wartezeit von 3 Sekunden ein. Unterscheidet sich das Programm von der Variante bei Punkt 1? Überlegen Sie zuerstz erst! Starten Sie nun das Programm und kontrollieren Sie durch Ausprobieren, ob Ihre Überlegung korrekt war! 4. Ändern Sie die Wiederholschleife so ab, dass die Schleife genau viermal wiederholt wird. Starten Sie nun das Programm und kontrollieren Sie durch Ausprobieren, ob Ihre Anpassung korrekt war! 5. Speichern Sie das Programm unter «Übung 6» ab. 14
17 Übung 7 (Lichtsensor einsetzen) Thema Zeitbedarf Software Voraussetzung Hilfe Lichtsensor, Fahren bis zum schwarzen Strich ca. 30 Minuten Robolab oder NXT-G Fahrzeug mit 2 Motoren (B linker Motor und C rechter Motor) und einem Lichtsensor auf Eingang 1. Eingebaute Hilfe in den entsprechenden Programmen! Flussdiagramm Start Motor B und C vorwärts Lichtwert 1 < Schwelle Motoren B und C stoppen Ende Tipp: Zuerst im NXT-Menü «View» den Lichtwert des Lichtsensor auf Hell (weiss) und auf Dunkel (schwarz) messen. Danach den Mittelwert als Schwelle berechnen. Beispiel: Hell = 57 Dunkel = 31 Schwelle = ( )/2 = 44 Beispiel Robolab Erstellen Sie das entsprechende Programm mit Robolab: Beispiel NXT-G Erstellen Sie das entsprechende Programm mit NXT-G: Hinweis Die Entscheidung «Lichtwert < Schwelle» und die Wiederholung bis der gewünschte Lichtwert erreicht ist, ist in den entsprechenden «Wait-Blöcken» hinterlegt! 15
18 Aufträge 1. Starten Sie nun das Programm und kontrollieren Sie die korrekte Funktion. 2. Stören Sie mit einer externen Lichtquelle (Lampe oder starke Taschenlampe) den Lichtsensor von aussen. Starten Sie nun das Programm und kontrollieren Sie die korrekte Funktion. 3. Überprüfen Sie im NXT-Menü «View» die Veränderung des Lichtwerts, wenn der Lichtsensor mit einer externen Lichtquelle von aussen gestört wird. 4. Speichern Sie das Programm unter «Übung 7» ab. 16
19 Übung 8 (Umgebungslicht korrigieren) Thema Zeitbedarf Software Voraussetzung Hilfe Wert des Lichtsensor abspeichern, Fahren bis zum schwarzen Strich ca. 30 Minuten Robolab oder NXT-G Fahrzeug mit 2 Motoren (B linker Motor und C rechter Motor) und einem Lichtsensor auf Eingang 1. Eingebaute Hilfe in den entsprechenden Programmen! Flussdiagramm Start Start = Lichtsensor 1 Start = Start - Offset Motoren B und C einschalten Lichtsensor 1 < Start Motoren B und C stoppen Hinweis: Die Zuweisung «Start = Start - Offset» darf nicht mit einer mathematischen Gleichung verwechselt werden. Annahme: Lichtsensor = 55 Offset = 5 Somit beträgt nach dem ersten Block der Wert von «Start» 55. Nach dem zweiten Block wird vom «Start» 5 subtrahiert und wieder in der Variablen «Start» abgespeichert. Somit beträgt schlussendlich der Wert von «Start» 50! Ende Beispiel Robolab Erstellen Sie das entsprechende Programm mit Robolab: Beispiel NXT-G Erstellen Sie das entsprechende Programm mit NXT-G: 17
20 Aufträge 1. Starten Sie nun das Programm und kontrollieren Sie die korrekte Funktion. 2. Stören Sie mit einer externen Lichtquelle (Lampe oder starke Taschenlampe) den Lichtsensor von aussen. Starten Sie nun das Programm und kontrollieren Sie die korrekte Funktion. 3. Schreiben Sie die verschiedenen Werte von «Start» auf das NXT- Display. 4. Speichern Sie das Programm unter «Übung 8» ab. 18
21 Übung 9 (Datenerfassung, ( nur mit Robolab) Thema Daten eines Sensors aufzeichnen Zeitbedarf ca. 30 Minuten Software Robolab (funktioniert momentan nur bei Robolab) Voraussetzung NXT und Beschleunigungssensor auf Eingang 1 Hilfe Eingebaute Hilfe in den entsprechenden Programmen! Flussdiagramm Start Initialisierung des Sensors Datenaufzeichnung starten (Abtastfrequenz) Programm Grundprinzip: Die drei hellblauen Blöcke sind notwendig, um die Daten eines Sensors zu erfassen: Initialisierung (welcher Sensor?) Datenaufzeichnung starten (wie häufig sollen Daten aufgezeichnet werden?) Datenaufzeichnung stoppen Datenaufzeichnung stoppen Ende Beispiel Erstellen Sie das entsprechende Programm mit Robolab: Tipp: Sie finden «Initialize Sensor Logging» für den Hitechnic- Beschleunigungssensor unter «User Libraries»/«Hitechnic Sensors». «User Libraries» Initialize Sensor Logging «Hitechnic Sensors» 19

22 Aufträge 1. Entfernen Sie das USB-Kabel. Danach starten Sie das Programm, werfen Sie den NXT in die Luft und fangen Sie den NXT wieder! 2. Sobald die Datenaufzeichnung beendet ist, verbinden Sie den NXT wieder über das USB-Kabel mit Ihrem PC. Starten Sie unter dem Menü «Projects» den «Detectiv»: Klicken Sie auf «Data Logged», die aufgezeichneten Daten werden nun auf vom NXT hinuntergeladen und grafisch angezeigt. 3. Speichern Sie das Programm unter «Übung 9A» ab. 4. Laden Sie «Übung 3» und ändern Sie das Programm wie folgt ab: 5. Überprüfen Sie die Genauigkeit der Drehbewegung mit verschiedenen Motorleistungen! 6. Tauschen Sie im Programm den Befehl «NXT Wait for Rotation» mit dem Befehl «NXT Wait for Location» aus. Überprüfen Sie erneut die Genauigkeit der Drehbewegung. Hinweis: Bei Verwendung von «NXT Wait for Location» kann die Motorleistung nicht beeinflusst werden. Sie können den Motorblock entfernen! 20
23 Übung 10 (Einer schwarzen Linie nachfahren) Thema Zeitbedarf Software Voraussetzung Hilfe Mit zwei Lichtsensoren einer schwarzen Linie nachfahren. Die Lichtsensoren müssen links bzw. rechts der schwarzen Linie positioniert werden. ca. 45 Minuten (ohne Optionen) Robolab oder NXT-G Fahrzeug mit 2 Motoren (B linker Motor und C rechter Motor) und zwei Lichtsensoren auf den Eingängen 1 und 3. Eingebaute Hilfe in den entsprechenden Programmen! Flussdiagramm Hauptprogramm rechter Sensor linker Sensor linker Motor rechter Motor -> Eingang 1 -> Eingang 3 -> Ausgang C -> Ausgang B (rechter Sensor auf Schwarz) Licht1 > 48 (linker Sensor auf Schwarz) Licht3 > 48 (kein Sensor auf Schwarz) Motor B vorwärts Motor C rückwärts (nach links drehen) Motor B rückwärts (nach rechts drehen Motor C vorwärts Aufträge 1. Erstellen Sie das Programm anhand des Flussdiagramms. 2. Gilt nur für Robolab: Die «Entscheidung» finden Sie unter «Structures»/«Forks». «Structures» «Forks» «NXT Light Sensor Fork» 3. Gilt nur für NXT-G: Die «Entscheidung» finden Sie unter «Ablauf/Schalter». Danach den Schalter auf «Lichtsensor» einstellen: «Ablauf» «Schalter» 21
24 4. Messen Sie die Lichtwerte der Sensoren im Modus «View» (siehe Übung 1). Übertragen Sie die gemessenen Messwerte ins Programm. Speichern Sie das Programm unter «Übung 10a» ab. Starten Sie nun das Programm und kontrollieren Sie die Funktion. 5. Sobald Sie das Umgebungslicht ändert oder die helle Tischoberfläche (z. B. anderer Tisch), müssen die Lichtwerte wieder in der Software angepasst werden. Erweitern Sie die Software so, dass die beiden Lichtwerte beim Start automatisch festgehalten werden (siehe Übung 8). Speichern Sie das Programm unter «Übung 10b» ab. Starten Sie nun das Programm und kontrollieren Sie die Funktion. 6. Mögliche Optionen: Was muss geändert werden, damit das Fahrzeug auf hellem Grund einer schwarzen Linie und umgekehrt auf dunklem Grund einer hellen Linie folgen kann? Vorgehen: Zuerst Flussdiagramm erstellen, danach Flussdiagramm in Software-Code umsetzen. Versuchen Sie mit nur einem Sensor einer Linie zu folgen! Vorgehen: Zuerst Flussdiagramm erstellen, danach Flussdiagramm in Software-Code umsetzen. Tipp: Messen Sie den Lichtwert eines Sensors im Modus «View» auf hellem und dunklen Grund und am Übergang von hell auf dunkel (Rand der Linie). Wie können Sie diese Information ausnützen? 22
25 Übung 11 (Fernsteuerung mit Bluetooth) Thema Zeitbedarf Software Voraussetzung Hilfe Über die Bluetooth-Verbindung können Befehle von einem NXT (Sender) auf einen zweiten NXT (Empfänger) übertragen werden. Damit lassen sich einfache ferngesteuerte Fahrzeuge realisieren. ca. 50 Minuten (ohne Optionen) Robolab oder NXT-G Fahrzeug mit 2 Motoren (B linker Motor und C rechter Motor) und ein zusätzlicher NXT mit zwei Berührungssensoren (Schalter). Eingebaute Hilfe in den entsprechenden Programmen! Flussdiagramme Start Senden Schalter 1 gedrückt? Mail mit 2 senden Mail mit 1 senden Start Empfangen Warten auf Mail Wert Mailbox <= 1 Motoren B und C rückwärts Motoren B und C vorwärts Aufträge 1. Erstellen Sie die beiden Programme anhand des Flussdiagramms. Als Hilfestellung können Sie die Datei «Übung 11 Senden Bauteile 1 Schalter» bzw. «Übung 11 Empfangen Bauteile 1 Schalter» zur Hilfe nehmen. Dort sind die notwendigen Funktionsblöcke bereits vorhanden. Sie müssen die Blöcke noch korrekt anordnen und verbinden. Speichern Sie die Programme als «Übung 11 a Senden» bzw. als «Übung 11 a Empfangen» ab. 2. Laden Sie das «Senden» auf den NXT mit dem Berührungssensor (Eingang 1). Entsprechend laden Sie das Programm «Empfangen» 23
26 auf das Fahrzeug. 3. Bevor die NXTs miteinander kommunizieren können, muss die Bluetooth-Verbindung zwischen den beiden NXTs aufgebaut werden (siehe nachfolgende Anleitung): 24
27 4. Starten Sie nun auf beiden NXTs die entsprechenden Programme und kontrollieren Sie die Funktion! 5. Mögliche Optionen: Mit einem Schalter können Sie zwei Zustände übermitteln: Schalter 1 nicht gedrückt -> Fahrzeug fährt vorwärts Schalter 1 gedrückt -> Fahrzeug fährt rückwärts Mit zwei Schaltern können Sie vier Zustände übermitteln. Wir legen fest, dass eine 0 bedeutet, dass der Schalter nicht gedrückt ist und entsprechend, dass eine 1 bedeutet, dass der Schalter gedrückt ist. Somit können mit 2 Schaltern, die folgenden Zustände übermittelt werden: Schalter 1 Schalter 2 Zustand 0 0 vorwärts fahren 0 1 nach rechts fahren 1 0 nach links fahren 1 1 rückwärts fahren Wenn jetzt also Schalter 1 und Schalter 2 nicht gedrückt werden, dann muss das Fahrzeug vorwärts fahren. Diese Tabelle erhält in einem Flussdiagramm («Senden») die folgende Struktur: Schalter 1 gedrückt? Schalter 2 gedrückt? Schalter 2 gedrückt? Erweitern Sie die Flussdiagramme «Senden» und «Empfangen» so, dass mit zwei Schaltern die vier Zustände übertragen werden. Danach ergänzen Sie die beiden Programme gemäss Ihrem Flussdiagramm. Speichern Sie die Programme als «Übung 11 b Senden» bzw. als «Übung 11 b Empfangen» ab. Laden Sie die Programme auf die entsprechenden NXTs. Erweitern Sie den «Sender-NXT» mit dem zweiten Berührungssensor (Eingang 2). Die Bluetooth-Verbindung muss wie unter Punkt 3 hergestellt werden (wenn ein NXT sich ausschaltet, wird die Bluetooth-Verbindung unterbrochen). Hinweis: Wenn Sie gar nicht weiterkommen, können Sie die Flussdiagramme bei der Lehrperson abholen! 25
28 Flussdiagramme (Lösungsvorschlag) Hinweis: Bei Robolab steht nur eine Mailbox zur Verfügung. Mit NXT-G können die Inhalte in verschiedenen Mailboxen (Briefkästen) abgelegt werden. Damit können andere Lösungen mit NXT-G realisiert werden. Siehe beigelegte Lösungen, im Ordner «Übung 11 mit zwei Schaltern (Version mit zwei Mailboxen). Schalter 1 Schalter 2 Zustand Nachricht (Zahl) 0 0 vorwärts fahren nach rechts fahren nach links fahren rückwärts fahren 4 Start Senden Schalter 1 gedrückt? Schalter 2 gedrückt? Schalter 2 gedrückt? Mail mit 4 senden (rückwärts) Mail mit 3 senden (links) Mail mit 2 senden (rechts) Mail mit 1 senden (vorwärts) Start Empfangen Warten auf Mail Wert Mailbox <= 2 Wert Mailbox <= 1 Wert Mailbox <= 3 Motoren B und C vorwärts Motor B rückwärts Motor C vorwärts Motor B vorwärts Motor C rückwärts Motoren B und C rückwärts Hinweis: Mit NXT-G können Mehrfachentscheidungen sehr elegant gelöst werden. Dazu muss bei einer Entscheidung (Schalter) die «offene Ansicht» deaktiviert werden (siehe nächste Seite). Danach können die verschiedenen Bedingungen konfiguriert werden. Somit kann das «Empfangsprogramm» einfacher dargestellt und programmiert werden (siehe nächste Seite). 26
29 Beispiel NXT-G Durch Anklicken der «Rechtecke» können die einzelnen Bedingungen konfiguriert werden! In der Ansicht ist momentan die «2.» Bedingung sicht- «Offene Ansicht» muss deaktiviert sein! Flussdiagramm für Übung 11 (Empfangen mit NXT-G) Start Empfangen Wert in Mailbox? Wert =? Motor B vorwärts Motor C vorwärts Motor B rückwärts Motor C vorwärts Motor B vorwärts Motor C rückwärts Motor B rückwärts Motor C rückwärts 27
Fragen? Wie komme ich effizient zu einem Programm? Wie beschreibe/dokumentiere ich meine Idee?
 Fragen? Wie komme ich effizient zu einem Programm? Wie beschreibe/dokumentiere ich meine Idee? Schritte beim Programmieren Idee, was der Roboter tun soll? EVA-Prinzip E: Eingabe Welche Daten werden über
Fragen? Wie komme ich effizient zu einem Programm? Wie beschreibe/dokumentiere ich meine Idee? Schritte beim Programmieren Idee, was der Roboter tun soll? EVA-Prinzip E: Eingabe Welche Daten werden über
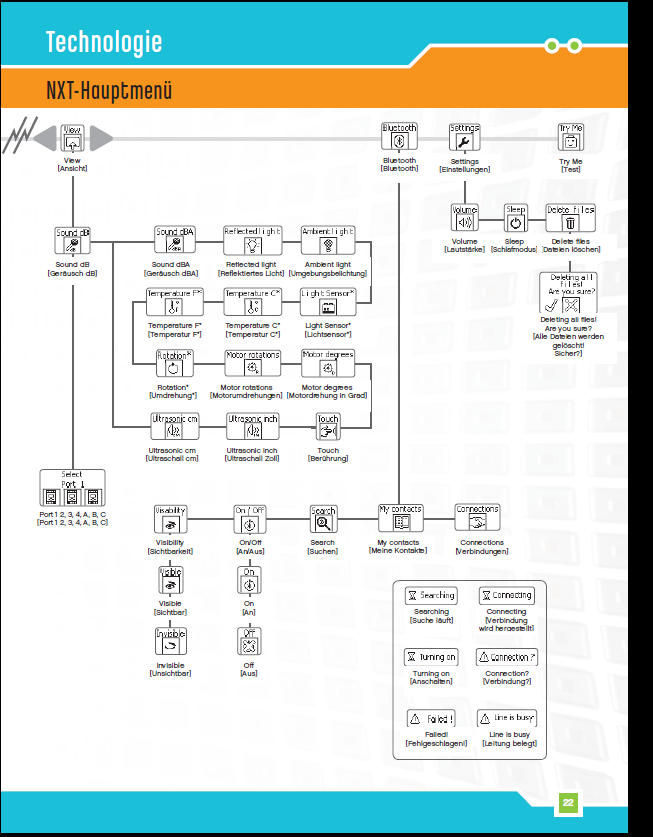
Technologie. NXT-Hauptmenü My Files
 My Files Im Untermenü My Files [Meine Dateien] kannst du alle Programme speichern, die du auf dem NXT erstellt oder von deinem Computer heruntergeladen hast. Unter diesem Menü befinden sich drei Ordner:
My Files Im Untermenü My Files [Meine Dateien] kannst du alle Programme speichern, die du auf dem NXT erstellt oder von deinem Computer heruntergeladen hast. Unter diesem Menü befinden sich drei Ordner:
Technologie. Unter diesem Menü befinden sich drei Ordner:
 My Files Die Dateien werden automatisch in den zutreffenden Ordner abgelegt. Wenn du ein Programm mit Klang-Datei auf den NXT herunterlädst, wird das Programm selbst unter Software files, die Klang-Datei
My Files Die Dateien werden automatisch in den zutreffenden Ordner abgelegt. Wenn du ein Programm mit Klang-Datei auf den NXT herunterlädst, wird das Programm selbst unter Software files, die Klang-Datei
Erste Schritte zum Start findest du hier: https://education.lego.com/de-de/weiterfuehrendeschulen/entdecken/informatik
 Robotik mit https://education.lego.com/de-de/downloads/mindstorms-ev3 Erste Schritte zum Start findest du hier: https://education.lego.com/de-de/weiterfuehrendeschulen/entdecken/informatik Baue zuerst
Robotik mit https://education.lego.com/de-de/downloads/mindstorms-ev3 Erste Schritte zum Start findest du hier: https://education.lego.com/de-de/weiterfuehrendeschulen/entdecken/informatik Baue zuerst
Wichtige Befehle bei der Programmierung von. FISCHER-Technik
 Wichtige Befehle bei der Programmierung von FISCHER-Technik 1 7 6 2 3 4 5 1) Interfacediagnose : Bevor du loslegst, teste alle, an den Eingängen E1-E8 angeschlossenen Schalter und Sensoren. Mit der linken
Wichtige Befehle bei der Programmierung von FISCHER-Technik 1 7 6 2 3 4 5 1) Interfacediagnose : Bevor du loslegst, teste alle, an den Eingängen E1-E8 angeschlossenen Schalter und Sensoren. Mit der linken
Die Denkschule 1 Reto Speerli
 Die Denkschule 1 Octopus A1 Aufgabe: Verbinde den NXT-Baustein (CPU) mit allen Motoren und den Sensoren (Berührung, Ultraschall, Licht und Geräusch). Logge dich beim Open-Roberta Lab ein und verbinde den
Die Denkschule 1 Octopus A1 Aufgabe: Verbinde den NXT-Baustein (CPU) mit allen Motoren und den Sensoren (Berührung, Ultraschall, Licht und Geräusch). Logge dich beim Open-Roberta Lab ein und verbinde den
Aufgabe Im Quadrat fahren
 Aufgabensammlung LEGO MINDSTORMS NXT Version 4.6.13 Aufgabe Im Quadrat fahren Ziel Sie programmieren den Lego Roboter mit dem Programm LEGO MINDSTORMS Sie kennen Bedingungen und Schleifen Zeitaufwand 20
Aufgabensammlung LEGO MINDSTORMS NXT Version 4.6.13 Aufgabe Im Quadrat fahren Ziel Sie programmieren den Lego Roboter mit dem Programm LEGO MINDSTORMS Sie kennen Bedingungen und Schleifen Zeitaufwand 20
Wie können See how wir far Enchanting away something mitteilen, is. dass am NXT der Lichtsensor an Port 3 angeschlossen ist?
 Wie können See how wir far Enchanting away something mitteilen, is. dass am NXT der Lichtsensor an Port 3 angeschlossen ist? 1. Klicke auf das Fühlen - Menü 2. Klicke auf Sensoren festlegen 3. Suche auf
Wie können See how wir far Enchanting away something mitteilen, is. dass am NXT der Lichtsensor an Port 3 angeschlossen ist? 1. Klicke auf das Fühlen - Menü 2. Klicke auf Sensoren festlegen 3. Suche auf
Inhaltsverzeichnis. 1 Anfang 2. 2 Erste Schritte 3. 3 Schleifen repeat while(true) Die if()-schleife... 5.
 Die if()-schleife... 5.") Inhaltsverzeichnis 1 Anfang 2 2 Erste Schritte 3 3 Schleifen 4 3.1 repeat...................................... 4 3.2 while(true).................................... 4 3.3 Die if()-schleife.................................
Inhaltsverzeichnis 1 Anfang 2 2 Erste Schritte 3 3 Schleifen 4 3.1 repeat...................................... 4 3.2 while(true).................................... 4 3.3 Die if()-schleife.................................
Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik graphische Programmierung
 Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik graphische Programmierung Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS
Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik graphische Programmierung Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS
Welche Roboter kennst du? Wo brauchst du zuhause Roboter?
 ROBOTER LÖSUNGEN Roboter Mensch Welche Roboter kennst du? Wo brauchst du zuhause Roboter? Individuelle Antworten: R2-D2 / BB6 / C-3PO (Star Wars), Wall-e, Rodney Copperbottom (Film Robots), Optimus Prime
ROBOTER LÖSUNGEN Roboter Mensch Welche Roboter kennst du? Wo brauchst du zuhause Roboter? Individuelle Antworten: R2-D2 / BB6 / C-3PO (Star Wars), Wall-e, Rodney Copperbottom (Film Robots), Optimus Prime
Programmieren mit RoboLab Bauen mit Lego
 Programmieren mit RoboLab 2.5.2 Bauen mit Lego 1. Doppelstunde Kommunikation zwischen Computer und RCX herstellen können. Motoren im und gegen den Uhrzeigersinn für eine bestimmte Zeit drehen lassen können.
Programmieren mit RoboLab 2.5.2 Bauen mit Lego 1. Doppelstunde Kommunikation zwischen Computer und RCX herstellen können. Motoren im und gegen den Uhrzeigersinn für eine bestimmte Zeit drehen lassen können.
Baue deinen ersten Roboter
 D3kjd3Di38lk323nnm 2 Baue deinen ersten Roboter In Kapitel 1 hast du gelernt, dass Roboter aus Motoren, Sensoren und dem EV3-Stein bestehen. Damit du besser verstehst, wie diese zusammenarbeiten, setzen
D3kjd3Di38lk323nnm 2 Baue deinen ersten Roboter In Kapitel 1 hast du gelernt, dass Roboter aus Motoren, Sensoren und dem EV3-Stein bestehen. Damit du besser verstehst, wie diese zusammenarbeiten, setzen
ROBOTER. LÖSUNGEN zur Arbeit mit dem LEGO Mindstorms EV3
 ROBOTER LÖSUNGEN zur Arbeit mit dem LEGO Mindstorms EV3 Roboter Mensch Welche Roboter kennst du? Wo brauchst du zuhause Roboter? Individuelle Antworten: R2-D2 / BB6 / C-3PO (Star Wars), Wall-e, Rodney
ROBOTER LÖSUNGEN zur Arbeit mit dem LEGO Mindstorms EV3 Roboter Mensch Welche Roboter kennst du? Wo brauchst du zuhause Roboter? Individuelle Antworten: R2-D2 / BB6 / C-3PO (Star Wars), Wall-e, Rodney
[ Experiment- und Datenprotokollierung. mit der EV3 Software]
![[ Experiment- und Datenprotokollierung. mit der EV3 Software]](/thumbs/39/18075793.jpg "[ Experiment- und Datenprotokollierung. mit der EV3 Software]") 2013 [ Experiment- und Datenprotokollierung mit der EV3 Software] Experiment Datenprotokollierung Es gibt zwei Möglichkeiten um die Datenaufzeichnung durchzuführen. Eine besteht darin, die Datenprotokollierung
2013 [ Experiment- und Datenprotokollierung mit der EV3 Software] Experiment Datenprotokollierung Es gibt zwei Möglichkeiten um die Datenaufzeichnung durchzuführen. Eine besteht darin, die Datenprotokollierung
Programmieren des NXT-Roboters mit LabView 2010
 Programmieren des NXT-Roboters mit LabView 2010 Von Alwin Ebermann 1. Voraussetzungen Der Roboter hat die neueste Firmenware LabView 2010 for NXT ist schon installiert (Testversion hier) 2. Programmieren
Programmieren des NXT-Roboters mit LabView 2010 Von Alwin Ebermann 1. Voraussetzungen Der Roboter hat die neueste Firmenware LabView 2010 for NXT ist schon installiert (Testversion hier) 2. Programmieren
Fakultät für Informatik, Institut für Robotik. Legorobotik Graphische Programmierung Vorstellung des EV3 Systems und der Programmierumgebung.
 Fakultät für Informatik, Institut für Robotik Legorobotik Graphische Programmierung Vorstellung des EV3 Systems und der Programmierumgebung Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System
Fakultät für Informatik, Institut für Robotik Legorobotik Graphische Programmierung Vorstellung des EV3 Systems und der Programmierumgebung Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System
Seite 1/6. ModellFerienPass.pdf).
.") Seite 1/6 NXC Programme Legomodell Am Ende dieser Doku findest ein Bild des Modells, das im Kurs eingesetzt wird. Alle Beispielprogramme basieren auf diesem Modell. Ein Anleitung zum Bau ist auf der CD
Seite 1/6 NXC Programme Legomodell Am Ende dieser Doku findest ein Bild des Modells, das im Kurs eingesetzt wird. Alle Beispielprogramme basieren auf diesem Modell. Ein Anleitung zum Bau ist auf der CD
ORIKA. Lycée Technique des Arts et Métiers. ... viel mehr als nur ein Spielzeug
 ORIKA Lycée Technique des Arts et Métiers... viel mehr als nur ein Spielzeug Informationen, Hinweise und Bezugsquellen findest du unter folgender Internetadresse: http://www.ltam.lu/fischertechnik ORIKA/Informatik
ORIKA Lycée Technique des Arts et Métiers... viel mehr als nur ein Spielzeug Informationen, Hinweise und Bezugsquellen findest du unter folgender Internetadresse: http://www.ltam.lu/fischertechnik ORIKA/Informatik
Programmübersicht Software EV3
 Programmübersicht Software EV3 8. 4. 2. 1. 5. 3. 6. 7. 1. Menüliste Reiter: Verwaltung der Projekte 2. Projekteigenschaften: Übersicht des Programms 3. Werkzeugliste: Programm kommentieren 4. Programmblöcke:
Programmübersicht Software EV3 8. 4. 2. 1. 5. 3. 6. 7. 1. Menüliste Reiter: Verwaltung der Projekte 2. Projekteigenschaften: Übersicht des Programms 3. Werkzeugliste: Programm kommentieren 4. Programmblöcke:
Softwarepraktikum Teamrobotik SS 2007 Abschlusspräsentation
 Inhalt des Vortrags Softwarepraktikum Teamrobotik SS 27 Abschlusspräsentation von Norman Siemer, Thomas Poltrock und Martin Schemmer Einleitung Aufgabenstellung: Kollisionsfreie Navigation durch einen
Inhalt des Vortrags Softwarepraktikum Teamrobotik SS 27 Abschlusspräsentation von Norman Siemer, Thomas Poltrock und Martin Schemmer Einleitung Aufgabenstellung: Kollisionsfreie Navigation durch einen
Postenblatt 1: Berührungssensor
 Postenblatt 1: Berührungssensor In diesem Posten lernst du den Berührungssensor kennen. - 1 x Berührungssensor Der Roboter «fühlt». Der Kontaktschalter besitzt vorne ein rotes, bewegliches Köpfchen, das
Postenblatt 1: Berührungssensor In diesem Posten lernst du den Berührungssensor kennen. - 1 x Berührungssensor Der Roboter «fühlt». Der Kontaktschalter besitzt vorne ein rotes, bewegliches Köpfchen, das
Robot-Design Software
 NanoGiants Academy e.v. Robot-Design Software 2017 NanoGiants Academy e.v. 1 Die Präsentation ist eine von vier über FLL Robot-Design Hardware Navigation Software Strategie http://nano-giants.net/robot-design
NanoGiants Academy e.v. Robot-Design Software 2017 NanoGiants Academy e.v. 1 Die Präsentation ist eine von vier über FLL Robot-Design Hardware Navigation Software Strategie http://nano-giants.net/robot-design
Vergleich zwischen Open Roberta / NEPO und LEGO MINDSTORMS EV3 / EV3-G. - Übersicht/Fact-Sheet - Programmblöcke - Beispielprogramme
 Vergleich zwischen Open Roberta / NEPO und LEGO MINDSTORMS EV3 / EV3-G - Übersicht/Fact-Sheet - Programmblöcke - Beispielprogramme Roberta-Zentrale Fraunhofer IAIS Version 1.0 18.07.2016 Übersicht Open
Vergleich zwischen Open Roberta / NEPO und LEGO MINDSTORMS EV3 / EV3-G - Übersicht/Fact-Sheet - Programmblöcke - Beispielprogramme Roberta-Zentrale Fraunhofer IAIS Version 1.0 18.07.2016 Übersicht Open
10.2 Grafische QM-Verfahren 1
 .2 1.2 Grafische QM-Verfahren 1 Anpassen von Excel 0.0 0.0..2.0. Da alle QM-Verfahren mit den Originalfunktionen von Excel erstellt wurden, können Sie einschlägige Literatur von unterschiedlichen Verlagen
.2 1.2 Grafische QM-Verfahren 1 Anpassen von Excel 0.0 0.0..2.0. Da alle QM-Verfahren mit den Originalfunktionen von Excel erstellt wurden, können Sie einschlägige Literatur von unterschiedlichen Verlagen
Softwarepraktikum Teamrobotik SS Gruppe 2
 Softwarepraktikum Teamrobotik SS 2007 Gruppe 2 1 LEGO MINDSTORMS NXT Education Base Set 2 Baumöglichkeiten 3 Die Hardware Sensoren: Lichtsensor Ultraschallsensor Geräuschsensor Berührungssensor 3 Motoren
Softwarepraktikum Teamrobotik SS 2007 Gruppe 2 1 LEGO MINDSTORMS NXT Education Base Set 2 Baumöglichkeiten 3 Die Hardware Sensoren: Lichtsensor Ultraschallsensor Geräuschsensor Berührungssensor 3 Motoren
Lego Roboter mit NXT-G programmieren. Hochschule Mannheim
 Lego Roboter mit NXT-G programmieren Hochschule Mannheim Die Programmiersprache NXT - G Grafische Programmiersprache zur Programmierung von Lego Robotern vom Typ NXT Das Programm Mindstorms NXT-G wird
Lego Roboter mit NXT-G programmieren Hochschule Mannheim Die Programmiersprache NXT - G Grafische Programmiersprache zur Programmierung von Lego Robotern vom Typ NXT Das Programm Mindstorms NXT-G wird
Die Einführung von mehreren "Start Bausteinen", um das Programm zu starten, realisiert leicht die parallele Programmverarbeitung (Parallele Tasks).
.") Programmierung Allgemein Anfänger und Fortgeschrittene können die Programmierfunktion in der LEGO MINDSTORMS Education EV3 Software gut nutzen, weil sie vor allem grafisch ist. Mit Blick auf das Programmieren
Programmierung Allgemein Anfänger und Fortgeschrittene können die Programmierfunktion in der LEGO MINDSTORMS Education EV3 Software gut nutzen, weil sie vor allem grafisch ist. Mit Blick auf das Programmieren
EINFÜHRUNG LEGO MINDSTORMS
 EINFÜHRUNG LEGO MINDSTORMS LabVIEW 2014 Prof. Dr.-Ing. Dahlkemper 1 NXT DIRECT COMMANDS Es gibt zwei verschiedene Möglichkeiten, die Lego-Roboter zu programmieren: Man kann das Programm direkt auf den
EINFÜHRUNG LEGO MINDSTORMS LabVIEW 2014 Prof. Dr.-Ing. Dahlkemper 1 NXT DIRECT COMMANDS Es gibt zwei verschiedene Möglichkeiten, die Lego-Roboter zu programmieren: Man kann das Programm direkt auf den
5. NXT kann hören und Entfernungen erkennen: Test der Sensoren
 5. NXT kann hören und Entfernungen erkennen: Test der Sensoren Mit dem NXT werden vier verschiedene Sensoren mitgeliefert. In diesem Kapitel lernst du die Funktion der Sensoren kennen. Im Fenster Robot
5. NXT kann hören und Entfernungen erkennen: Test der Sensoren Mit dem NXT werden vier verschiedene Sensoren mitgeliefert. In diesem Kapitel lernst du die Funktion der Sensoren kennen. Im Fenster Robot
Komponenten: Das Selbstfahrende Auto besitzt 2 Motoren und 2 Sensoren.
 1 Lösung Beschreibe das Auto und das was es tut! Lese und verstehe diesen Text, damit es dir leichter fällt, das Auto und seine Funktionen zu programmieren! Weiterführende Google Keywords: Robotik Robot
1 Lösung Beschreibe das Auto und das was es tut! Lese und verstehe diesen Text, damit es dir leichter fällt, das Auto und seine Funktionen zu programmieren! Weiterführende Google Keywords: Robotik Robot
Wozu braucht man Geometrie? Kreisumfang
 Wozu braucht man Geometrie? Kreisumfang Roberta-Experiment mit dem LEGO Mindstorms NXT Roberta ist ein eingetragenes Warenzeichen der Fraunhofer-Gesellschaft e.v. Roberta ist seit 2010 Mitglied der Fraunhofer
Wozu braucht man Geometrie? Kreisumfang Roberta-Experiment mit dem LEGO Mindstorms NXT Roberta ist ein eingetragenes Warenzeichen der Fraunhofer-Gesellschaft e.v. Roberta ist seit 2010 Mitglied der Fraunhofer
Erforderliches Zubehör (nicht im Lieferumfang enthalten)
") T6K SOFTWARE UPDATE ANLEITUNG (Version: 2.0) Durch Software Updates bleibt Ihr Futaba T6K Fernsteuersystem stets auf dem aktuellen Stand und kann um interessante Funktionen erweitert werden. Laden Sie
T6K SOFTWARE UPDATE ANLEITUNG (Version: 2.0) Durch Software Updates bleibt Ihr Futaba T6K Fernsteuersystem stets auf dem aktuellen Stand und kann um interessante Funktionen erweitert werden. Laden Sie
Sie bauen Ihren ersten Roboter
 2 Sie bauen Ihren ersten Roboter Wie Sie in Kapitel 1 gesehen haben, besteht ein Roboter aus mehreren wichtigen Bestandteilen. Damit Sie die Funktionsweise der einzelnen Teile mühelos und Schritt für Schritt
2 Sie bauen Ihren ersten Roboter Wie Sie in Kapitel 1 gesehen haben, besteht ein Roboter aus mehreren wichtigen Bestandteilen. Damit Sie die Funktionsweise der einzelnen Teile mühelos und Schritt für Schritt
2. Die Grundbausteine
 . Die Grundbausteine. Die Grundbausteine Inhaltsverzeichnis.. Der Motorbaustein..... Der Klangbaustein... 4.3. Der Anzeigebaustein... 7.4. Der Warte-Baustein... 8 -LEGO Grundbausteine 4.05.0 . Die Grundbausteine:
. Die Grundbausteine. Die Grundbausteine Inhaltsverzeichnis.. Der Motorbaustein..... Der Klangbaustein... 4.3. Der Anzeigebaustein... 7.4. Der Warte-Baustein... 8 -LEGO Grundbausteine 4.05.0 . Die Grundbausteine:
Fakultät für Informatik, Institut für Robotik Laborpraktikum I - Medizinarena Legorobotik in C EV3
 Fakultät für Informatik, Institut für Robotik Laborpraktikum I - Medizinarena Legorobotik in C EV3 Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS
Fakultät für Informatik, Institut für Robotik Laborpraktikum I - Medizinarena Legorobotik in C EV3 Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS
Arbeitsblatt: Berührungssensor (Posten 1)
") Arbeitsblatt: Berührungssensor (Posten 1) a) Was bedeutet die Zahl, die auf dem Display angezeigt wird, wenn du den Sensor benutzt? b) Wie schnell reagiert der Sensor? c) Ändert sich der Wert, wenn der
Arbeitsblatt: Berührungssensor (Posten 1) a) Was bedeutet die Zahl, die auf dem Display angezeigt wird, wenn du den Sensor benutzt? b) Wie schnell reagiert der Sensor? c) Ändert sich der Wert, wenn der
Neue Sensor AID Funktionen Ab Firmware V1.28
 Neue Sensor AID Funktionen Ab Firmware V1.28 Inhalt A. Sensor-Typ überprüfen B. Wireless (Kontaktlos) Programmier-Schutz C. Datenspeicherung für 20 Fahrzeuge A. Sensor-Typ überprüfen Ziel Den Anwender
Neue Sensor AID Funktionen Ab Firmware V1.28 Inhalt A. Sensor-Typ überprüfen B. Wireless (Kontaktlos) Programmier-Schutz C. Datenspeicherung für 20 Fahrzeuge A. Sensor-Typ überprüfen Ziel Den Anwender
1/12. IdeenSet Robotik. Pro-Bot Aufgabenblätter. IdeenSet Robotik. PHBern 2015,
 1/12 Pro-Bot Aufgabenblätter 2/12 Synchronisiertes Rennen Ich kann eine Abfolge von Befehlen in einen Roboter eingeben, so dass dieser an einen vorher bestimmten Punkt gelangt. 1 Pro-Bot pro SuS Mehrere
1/12 Pro-Bot Aufgabenblätter 2/12 Synchronisiertes Rennen Ich kann eine Abfolge von Befehlen in einen Roboter eingeben, so dass dieser an einen vorher bestimmten Punkt gelangt. 1 Pro-Bot pro SuS Mehrere
Fernmodifikation mit TeleCare
 Fernmodifikation mit TeleCare Die Fernmodifikation ist ein wirkungsvolles Werkzeug, wenn Sie Handlungsbedarf bei Ihren Kunden in der Hörgeräteausprobe identifiziert haben. Viele Hörgeräteakustiker haben
Fernmodifikation mit TeleCare Die Fernmodifikation ist ein wirkungsvolles Werkzeug, wenn Sie Handlungsbedarf bei Ihren Kunden in der Hörgeräteausprobe identifiziert haben. Viele Hörgeräteakustiker haben
Bedienungsanleitung für MEEM-Kabel-Desktop-App Mac
 Bedienungsanleitung für MEEM-Kabel-Desktop-App Mac Installation und Bedienungsanleitung - v0.9 Bevor Sie diese Anleitung lesen, sollten Sie bitte die Bedienungsanleitung für MEEM-Kabel und Handy-App für
Bedienungsanleitung für MEEM-Kabel-Desktop-App Mac Installation und Bedienungsanleitung - v0.9 Bevor Sie diese Anleitung lesen, sollten Sie bitte die Bedienungsanleitung für MEEM-Kabel und Handy-App für
MIDIcon 2-Zuordnungssoftware
 MIDIcon 2-Zuordnungssoftware Übersicht Mit diesem Programm können Sie beim Anschluss an einen MIDIcon 2 MIDI-Befehle den einzelnen Tasten, Fadern und Drehreglern zuordnen, um Ihre Beleuchtungssoftware
MIDIcon 2-Zuordnungssoftware Übersicht Mit diesem Programm können Sie beim Anschluss an einen MIDIcon 2 MIDI-Befehle den einzelnen Tasten, Fadern und Drehreglern zuordnen, um Ihre Beleuchtungssoftware
Programme erstellen und bearbeiten
 3 Programme erstellen und bearbeiten Ihren ersten Roboter haben Sie bereits gebaut. Was er nun jedoch braucht, um funktionieren zu können, ist ein Programm. Ein Programm sagt Ihrem Roboter, was er tun
3 Programme erstellen und bearbeiten Ihren ersten Roboter haben Sie bereits gebaut. Was er nun jedoch braucht, um funktionieren zu können, ist ein Programm. Ein Programm sagt Ihrem Roboter, was er tun
Kurzanleitung Programmierung (Ersetzt nicht die beigelegte Bedienungsanleitung)
") Kurzanleitung Programmierung (Ersetzt nicht die beigelegte Bedienungsanleitung) T5 EHz Version A: Vollautomatischer Modus mit festen Wellenverbindern und Stoppern/Endleiste Die Programmierung bitte bei
Kurzanleitung Programmierung (Ersetzt nicht die beigelegte Bedienungsanleitung) T5 EHz Version A: Vollautomatischer Modus mit festen Wellenverbindern und Stoppern/Endleiste Die Programmierung bitte bei
LEGO MINDSTORMS NXT MIT LABVIEW 2009 PROGRAMMIEREN
 LEGO MINDSTORMS NXT MIT LABVIEW 2009 PROGRAMMIEREN Prof. Dr.-Ing. Dahlkemper Fabian Schwartau Patrick Voigt 1 NXT DIRECT COMMANDS Es gibt zwei verschiedene Möglichkeiten, den NXT zu programmieren: Es werden
LEGO MINDSTORMS NXT MIT LABVIEW 2009 PROGRAMMIEREN Prof. Dr.-Ing. Dahlkemper Fabian Schwartau Patrick Voigt 1 NXT DIRECT COMMANDS Es gibt zwei verschiedene Möglichkeiten, den NXT zu programmieren: Es werden
Pacman. Projektbeschreibung. Aus was wir Pacman nachgebaut haben. Anpassungen and die physikalische Welt, oder wie wir das
 Pacman Projektbeschreibung Übersicht: Unser Projekt Was Pacman eigentlich ist. Aus was wir Pacman nachgebaut haben. Anpassungen and die physikalische Welt, oder wie wir das Pacman-Spiel mit Lego implementiert
Pacman Projektbeschreibung Übersicht: Unser Projekt Was Pacman eigentlich ist. Aus was wir Pacman nachgebaut haben. Anpassungen and die physikalische Welt, oder wie wir das Pacman-Spiel mit Lego implementiert
Daniel Braun. Roboter programmieren. mit NXT-G für LEGO MINDSTORMS NXT
 Daniel Braun Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT Kapitel 2 LEGO MINDSTORMS LEGO kennen viele aus ihrer Kindheit oder von den eigenen Kindern, LEGO, das sind bunte Spielzeugklötze, mit
Daniel Braun Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT Kapitel 2 LEGO MINDSTORMS LEGO kennen viele aus ihrer Kindheit oder von den eigenen Kindern, LEGO, das sind bunte Spielzeugklötze, mit
Messungen mit dem Lichtsensor
 Messungen mit dem Lichtsensor Für die Programmierung eines Roboters, der einer Linie folgt, brauchen wir für die drei Farben die Helligkeitswerte, die dein Lichtsensor jeweils ausgibt. Arbeite dazu folgende
Messungen mit dem Lichtsensor Für die Programmierung eines Roboters, der einer Linie folgt, brauchen wir für die drei Farben die Helligkeitswerte, die dein Lichtsensor jeweils ausgibt. Arbeite dazu folgende
Benutzerhandbuch SmarTachUpdate
 Benutzerhandbuch SmarTachUpdate 3. Benutzung des Update Programms Starten Sie das Programm SmarTachUpdate und wählen Sie beim ersten Programmstart die Sprache aus. Wenn noch nicht vorhanden, muss ein Update
Benutzerhandbuch SmarTachUpdate 3. Benutzung des Update Programms Starten Sie das Programm SmarTachUpdate und wählen Sie beim ersten Programmstart die Sprache aus. Wenn noch nicht vorhanden, muss ein Update
NuVinci Desktop PC Gebrauchsanweisung (enthält NuVinci Harmony Sortware-Update Anleitung)
") NuVinci Desktop PC Gebrauchsanweisung (enthält NuVinci Harmony Sortware-Update Anleitung) NuVinci Computer Software (Harmony Programmierung) Erstellt für Händler und Hersteller Internet-download erfolgt
NuVinci Desktop PC Gebrauchsanweisung (enthält NuVinci Harmony Sortware-Update Anleitung) NuVinci Computer Software (Harmony Programmierung) Erstellt für Händler und Hersteller Internet-download erfolgt
Betriebs- & Softwareanleitung RGB Controller
 Betriebs- & Softwareanleitung RGB Controller Projekt öffnen Projekt anlegen Projekt speichern Tagesabläufe auf den Simulator übertragen Gerätezeit mit Computeruhr synchronisieren ZEIT ROT GRÜN BLAU WEIß
Betriebs- & Softwareanleitung RGB Controller Projekt öffnen Projekt anlegen Projekt speichern Tagesabläufe auf den Simulator übertragen Gerätezeit mit Computeruhr synchronisieren ZEIT ROT GRÜN BLAU WEIß
Bedienungsanleitung PRO-C DISPLAY
 Bedienungsanleitung PRO-C DISPLAY Anschlussplan Anschluß der Stromversorgung / Sensoren / Steller Das Modul benötigt einen Bordnetzanschluß. Die maximale Eingangsspannung beträgt 18V. Klemmen Sie die Stromversorgung
Bedienungsanleitung PRO-C DISPLAY Anschlussplan Anschluß der Stromversorgung / Sensoren / Steller Das Modul benötigt einen Bordnetzanschluß. Die maximale Eingangsspannung beträgt 18V. Klemmen Sie die Stromversorgung
cagebot control quick start guide trike robot revision 1.3
 cagebot control trike robot quick start guide revision 1.3 Anleitung Stand 17.12.2015. Die aktuellste Version finden Sie auf unserer Website: www.cagebot.de Übersicht 1. "cagebot control" laden 3 2. mit
cagebot control trike robot quick start guide revision 1.3 Anleitung Stand 17.12.2015. Die aktuellste Version finden Sie auf unserer Website: www.cagebot.de Übersicht 1. "cagebot control" laden 3 2. mit
Arbeit_Roboter. Setze einen Haken bei den Fragen, die du für richtig hältst: Bei Textantworten oder Lückentexten gib jeweils das Ergebnis an.
 Arbeit_Roboter drucken neu_sortieren verschicken verschicken_selbsttest Setze einen Haken bei den Fragen, die du für richtig hältst: Bei Textantworten oder Lückentexten gib jeweils das Ergebnis an. Vorname:
Arbeit_Roboter drucken neu_sortieren verschicken verschicken_selbsttest Setze einen Haken bei den Fragen, die du für richtig hältst: Bei Textantworten oder Lückentexten gib jeweils das Ergebnis an. Vorname:
Roboter programmieren mit NXC für LEGO MINDSTORMS NXT
 Daniel Braun Roboter programmieren mit NXC für LEGO MINDSTORMS NXT mitp Vorwort 13 i NXTundNXC 15 i.i DerNXT 15 1.2 NXC 16 1.2.1 Not exactly С 16 1.2.2 Compiler 17 1.2.3 Zusammenfassung 17 2 BricxCC 19
Daniel Braun Roboter programmieren mit NXC für LEGO MINDSTORMS NXT mitp Vorwort 13 i NXTundNXC 15 i.i DerNXT 15 1.2 NXC 16 1.2.1 Not exactly С 16 1.2.2 Compiler 17 1.2.3 Zusammenfassung 17 2 BricxCC 19
HD450 Lichtmesser mit Datalogger SOFTWARE-EINFÜHRUNG
 HD450 Lichtmesser mit Datalogger SOFTWARE-EINFÜHRUNG Dieses Programm kann Daten vom HD450 sammeln, wenn das Messgerät mit einem PC verbunden ist und Daten vom Speicher des Messgerätes zum PC übertragen.
HD450 Lichtmesser mit Datalogger SOFTWARE-EINFÜHRUNG Dieses Programm kann Daten vom HD450 sammeln, wenn das Messgerät mit einem PC verbunden ist und Daten vom Speicher des Messgerätes zum PC übertragen.
Software Update (ATX3/AURES)
") In dieser Anleitung wird beschrieben, wie Sie das Update auf Ihr ATX/AURES aufspielen können. Lesen Sie sich zunächst die komplette Anleitung durch, bevor Sie den Update-Vorgang durchführen. Der Update-Vorgang
In dieser Anleitung wird beschrieben, wie Sie das Update auf Ihr ATX/AURES aufspielen können. Lesen Sie sich zunächst die komplette Anleitung durch, bevor Sie den Update-Vorgang durchführen. Der Update-Vorgang
Fraunhofer IAIS. Lernen mit Robotern. Roberta Grundlagen und Experimente. Roberta-Reihe Band 1 - NXT
 Fraunhofer IAIS Lernen mit Robotern Roberta Grundlagen und Experimente Roberta-Reihe Band 1 - NXT Inhaltsverzeichnis Inhaltsverzeichnis Kapitel 1 Einführung 1 Einleitung 3 Roboter in der Bildung 4 LEGO
Fraunhofer IAIS Lernen mit Robotern Roberta Grundlagen und Experimente Roberta-Reihe Band 1 - NXT Inhaltsverzeichnis Inhaltsverzeichnis Kapitel 1 Einführung 1 Einleitung 3 Roboter in der Bildung 4 LEGO
Technik veranschaulichen und begreifen mit LEGO MINDSTORMS Robotern
 Technik veranschaulichen und begreifen mit LEGO MINDSTORMS Robotern SWiSE - 2. Innovationstag - naturwissenschaftlicher-technischer Unterricht - FHNW Brugg - 5 März 2011 SWiSE Innovationstag: Technik veranschaulichen
Technik veranschaulichen und begreifen mit LEGO MINDSTORMS Robotern SWiSE - 2. Innovationstag - naturwissenschaftlicher-technischer Unterricht - FHNW Brugg - 5 März 2011 SWiSE Innovationstag: Technik veranschaulichen
Illustrierende Aufgaben zum LehrplanPLUS. Realschule, Informationstechnologie, Lernbereich 2: Modul Roboter unterwegs. Stand:
 Roboter unterwegs Stand: 12.07.2017 Jahrgangsstufen Lernbereich 2: Modul 2.7.2 Fach/Fächer Übergreifende Bildungs- und Erziehungsziele Zeitrahmen Benötigtes Material Informationstechnologie Technische
Roboter unterwegs Stand: 12.07.2017 Jahrgangsstufen Lernbereich 2: Modul 2.7.2 Fach/Fächer Übergreifende Bildungs- und Erziehungsziele Zeitrahmen Benötigtes Material Informationstechnologie Technische
Anleitungen zum Arbeiten mit den Flashrecordern der Medienwerkstatt. - Aufnahmen vom Flashrecorder auf den Computer laden
 AUDIO (Version August 2012) Anleitungen zum Arbeiten mit den Flashrecordern der Medienwerkstatt Inhalt: - vom Radio aufnehmen - Sprachaufnahme mit dem Flashrecorder - Aufnahmen vom Flashrecorder auf den
AUDIO (Version August 2012) Anleitungen zum Arbeiten mit den Flashrecordern der Medienwerkstatt Inhalt: - vom Radio aufnehmen - Sprachaufnahme mit dem Flashrecorder - Aufnahmen vom Flashrecorder auf den
Kapitel 23 Importieren einer DWG-Zeichnung, nicht von MasterChef erstellt
 Kapitel 23 Importieren einer DWG-Zeichnung, nicht von MasterChef erstellt Hinweis: In diesem Tutorial werden wir DWG Dateien bevorzugen, welche in den Video- Ordner Zip (Kap. 23) sind. Starten Sie MasterChef
Kapitel 23 Importieren einer DWG-Zeichnung, nicht von MasterChef erstellt Hinweis: In diesem Tutorial werden wir DWG Dateien bevorzugen, welche in den Video- Ordner Zip (Kap. 23) sind. Starten Sie MasterChef
Handbuch Steuertafel Für Terrassendach
 Handbuch Steuertafel Für Terrassendach Versão 1.1 Letzte Revision: 6/2018 / Deutsch (DE) Inhaltsverzeichnis 1. Produktbeschreibung... 3 1.1. Technische Daten... 3 1.2. Abmessungen... 3 1.3. Produkt Übersicht...
Handbuch Steuertafel Für Terrassendach Versão 1.1 Letzte Revision: 6/2018 / Deutsch (DE) Inhaltsverzeichnis 1. Produktbeschreibung... 3 1.1. Technische Daten... 3 1.2. Abmessungen... 3 1.3. Produkt Übersicht...
Bedienungsanleitung für das MEEM-Netzwerk
 Bedienungsanleitung für das MEEM-Netzwerk 1. Über das MEEM-Netzwerk Bevor Sie diese Anleitung lesen, sollten Sie bitte die Bedienungsanleitungen für MEEM-Kabel und Handy-App für ios oder Android sowie
Bedienungsanleitung für das MEEM-Netzwerk 1. Über das MEEM-Netzwerk Bevor Sie diese Anleitung lesen, sollten Sie bitte die Bedienungsanleitungen für MEEM-Kabel und Handy-App für ios oder Android sowie
Bedienungsanleitung. Datenmess- und Speichersystem. PWBlogg. Tablet-PC Software PWB-Soft 3.0 App. Für Windows und Android
 Bedienungsanleitung Datenmess- und Speichersystem PWBlogg Tablet-PC Software PWB-Soft 3.0 App Für Windows und Android Inhalt 1 Installation 3 1.1 Windows 3 1.2 Android 3 2 Einführung 3 3 Programmstart
Bedienungsanleitung Datenmess- und Speichersystem PWBlogg Tablet-PC Software PWB-Soft 3.0 App Für Windows und Android Inhalt 1 Installation 3 1.1 Windows 3 1.2 Android 3 2 Einführung 3 3 Programmstart
Beim ROBORACE werden jedes Jahr Schüler und Studierende mit einer neuen Aufgabe aus dem Bereich der Technischen Kybernetik herausgefordert.
 Beim ROBORACE werden jedes Jahr Schüler und Studierende mit einer neuen Aufgabe aus dem Bereich der Technischen Kybernetik herausgefordert. Die Schüler entwickeln selbstständig vollautonome Roboter auf
Beim ROBORACE werden jedes Jahr Schüler und Studierende mit einer neuen Aufgabe aus dem Bereich der Technischen Kybernetik herausgefordert. Die Schüler entwickeln selbstständig vollautonome Roboter auf
2. Software RoboLab Allgemeine Bedienung Firmware
 2. Software RoboLab 2.1. Allgemeine Bedienung Starten und weiter... : Zum Starten Doppelklick auf die RoboLab-Verknüpfung auf dem Desktop Auf Programmer klicken Inventorlevel wählen Fenster (das untere)
2. Software RoboLab 2.1. Allgemeine Bedienung Starten und weiter... : Zum Starten Doppelklick auf die RoboLab-Verknüpfung auf dem Desktop Auf Programmer klicken Inventorlevel wählen Fenster (das untere)
DESK PANEL PRIME BEDIENUNGSANLEITUNG. Intuitives Bedienelement für elektromotorisch höhenverstellbare Tische
 DESK PANEL PRIME BEDIENUNGSANLEITUNG Intuitives Bedienelement für elektromotorisch höhenverstellbare Tische coneon GmbH Rehbergkuppe 8 35745 Herborn Tel. 02772 57697-0 Fax 02772 57697-50 info@coneon.de
DESK PANEL PRIME BEDIENUNGSANLEITUNG Intuitives Bedienelement für elektromotorisch höhenverstellbare Tische coneon GmbH Rehbergkuppe 8 35745 Herborn Tel. 02772 57697-0 Fax 02772 57697-50 info@coneon.de
Tausch der Lambdasonde LSM11 auf HuS118 Touch Screen. Montage E. Tausch der Lambdasonde LSM11 auf HuS
 Tausch der Lambdasonde LSM11 auf HuS118 Touch Screen Montage 015-4813-00-E Tausch der Lambdasonde LSM11 auf HuS118 2011-03 Inhaltsverzeichnis Typen von Lambdasonden...3 Lieferumfang HuS118...3 Softwarestand
Tausch der Lambdasonde LSM11 auf HuS118 Touch Screen Montage 015-4813-00-E Tausch der Lambdasonde LSM11 auf HuS118 2011-03 Inhaltsverzeichnis Typen von Lambdasonden...3 Lieferumfang HuS118...3 Softwarestand
Dokumentation IBIS Master Version 1.5.6
 Dokumentation IBIS Master Version 1.5.6 Seite 1 von 9 11.01.06 Inhaltsverzeichnis 1. Einleitung... 3 2. Hardware IBIS Master... 4 3. Software IBIS Master..... 5 3.1 Installation und Programmstart... 5
Dokumentation IBIS Master Version 1.5.6 Seite 1 von 9 11.01.06 Inhaltsverzeichnis 1. Einleitung... 3 2. Hardware IBIS Master... 4 3. Software IBIS Master..... 5 3.1 Installation und Programmstart... 5
Funktionsbeschreibung Datenlogger DL28W
 Funktionsbeschreibung Datenlogger DL28W Voreinstellungen des Datenloggers: Im Datenlogger sind folgende Aufzeichnungs und Alarmwerte voreingestellt: Aufzeichnung: Raumfühler T1 Verdampferfühler T2 Sollwert
Funktionsbeschreibung Datenlogger DL28W Voreinstellungen des Datenloggers: Im Datenlogger sind folgende Aufzeichnungs und Alarmwerte voreingestellt: Aufzeichnung: Raumfühler T1 Verdampferfühler T2 Sollwert
Thymio Challenge-Karten
 Thymio Challenge-Karten Thymio besteht mit deinen Programmen kleine Abenteuer. Tipps, Tricks und Musterlösungen: tiny.phzh.ch/ thymio Challenge-Karten Inhalt 0 Einführung 1 Leuchtsignale 2 Töne 3 Kennenlernen
Thymio Challenge-Karten Thymio besteht mit deinen Programmen kleine Abenteuer. Tipps, Tricks und Musterlösungen: tiny.phzh.ch/ thymio Challenge-Karten Inhalt 0 Einführung 1 Leuchtsignale 2 Töne 3 Kennenlernen
Anleitung zur Nutzung von ONLYOFFICE in der Hessenbox
 Anleitung zur Nutzung von ONLYOFFICE in der Hessenbox Inhalt 1 Verfügbarkeit von ONLYOFFICE... 2 2 Bearbeiten von Dokumenten... 2 3 Neue Datei erstellen... 2 4 Registerkarte Datei... 3 4.1 Datei Speichern
Anleitung zur Nutzung von ONLYOFFICE in der Hessenbox Inhalt 1 Verfügbarkeit von ONLYOFFICE... 2 2 Bearbeiten von Dokumenten... 2 3 Neue Datei erstellen... 2 4 Registerkarte Datei... 3 4.1 Datei Speichern
Das Handy als Musikinstrument
 Benötigte Hard- oder Software Audacity (Freeware unter http://www.audacity.de) LAME mp3 Encoder (Freeware unter http://lame.buanzo.com.ar/ ) Mikrofon Handy USB-Kabel für Handy Evtl. Bluetooth-Adapter Evtl.
Benötigte Hard- oder Software Audacity (Freeware unter http://www.audacity.de) LAME mp3 Encoder (Freeware unter http://lame.buanzo.com.ar/ ) Mikrofon Handy USB-Kabel für Handy Evtl. Bluetooth-Adapter Evtl.
LEGO -EV3-Roboter. Bauen und programmieren mit LEGO MINDSTORMS EV3. Bearbeitet von Laurens Valk
 LEGO -EV3-Roboter Bauen und programmieren mit LEGO MINDSTORMS EV3 Bearbeitet von Laurens Valk 1. Auflage 2014. Taschenbuch. XXII, 372 S. Paperback ISBN 978 3 86490 151 5 Format (B x L): 20 x 25 cm Weitere
LEGO -EV3-Roboter Bauen und programmieren mit LEGO MINDSTORMS EV3 Bearbeitet von Laurens Valk 1. Auflage 2014. Taschenbuch. XXII, 372 S. Paperback ISBN 978 3 86490 151 5 Format (B x L): 20 x 25 cm Weitere
Mess- und Regelungstechnik
 Mess- und Regelungstechnik Professor: Dr. Löffler Mang Semester: WS 00/01 Inhaltsverzeichnis 1. Thema 2. Das Mind- Storm- System 2.1 Der RCX 2.2 Die Sensoren 2.2.1 Der Tastsensor 2.2.2 Der Lichtsensor
Mess- und Regelungstechnik Professor: Dr. Löffler Mang Semester: WS 00/01 Inhaltsverzeichnis 1. Thema 2. Das Mind- Storm- System 2.1 Der RCX 2.2 Die Sensoren 2.2.1 Der Tastsensor 2.2.2 Der Lichtsensor
Einfach Informatik Lernumgebung
 Einfach Informatik Lernumgebung Übersicht Die Lernumgebung zum Lehrmittel «Einfach Informatik Daten darstellen, verschlüsseln, komprimieren» dient als Ergänzung zum Buch. Damit können ergänzende Aufgaben
Einfach Informatik Lernumgebung Übersicht Die Lernumgebung zum Lehrmittel «Einfach Informatik Daten darstellen, verschlüsseln, komprimieren» dient als Ergänzung zum Buch. Damit können ergänzende Aufgaben
Übungen. Version
 en Version 03.12.2018 by Luxembourg Institute of Science and Technology, 2018 Verwendung der Arbeitsblätter Folgende Informationen findest du auf jedem Arbeitsblatt. Das Material welches du für diese
en Version 03.12.2018 by Luxembourg Institute of Science and Technology, 2018 Verwendung der Arbeitsblätter Folgende Informationen findest du auf jedem Arbeitsblatt. Das Material welches du für diese
Workshop #1 Grundlagen, Motorsteuerung, Schleifen
 Workshop #1 Grundlagen, Motorsteuerung, Schleifen Inhalte des Workshops Bauen und Kennenlernen des EV3 System Einstieg in die grafische Programmieroberfläche - Aufbau der grafischen Oberfläche - Wie kommt
Workshop #1 Grundlagen, Motorsteuerung, Schleifen Inhalte des Workshops Bauen und Kennenlernen des EV3 System Einstieg in die grafische Programmieroberfläche - Aufbau der grafischen Oberfläche - Wie kommt
EV3-TECHNIK. EV3-Sensoren
 Farbsensor Beim Farbsensor handelt es sich um einen digitalen Sensor, der die Farbe oder die Stärke des Lichts erkennen kann, das durch das kleine Fenster an der Vorderseite des Sensors eindringt. Dieser
Farbsensor Beim Farbsensor handelt es sich um einen digitalen Sensor, der die Farbe oder die Stärke des Lichts erkennen kann, das durch das kleine Fenster an der Vorderseite des Sensors eindringt. Dieser
Der CodeBug. A) Erste Schritte. 1) Einleitung
 Erste Schritte. 1) Einleitung") Der CodeBug A) Erste Schritte 1) Einleitung.) Wenn wir den CodeBug mittels USB-Kabel bei gedrückter Taste A an den Computer anschließen, blinkt die erste LED rot. Der Computer selbst erkennt ihn als einfachen
Der CodeBug A) Erste Schritte 1) Einleitung.) Wenn wir den CodeBug mittels USB-Kabel bei gedrückter Taste A an den Computer anschließen, blinkt die erste LED rot. Der Computer selbst erkennt ihn als einfachen
Lego-Roboter im Informatik-Unterricht der Sekundarstufe I
 Neben Robolab und dem Robotics Invention System gibt es eine Vielzahl von Programmierumgebungen für Lego Mindstorms Roboter, z. B. NQC oder LEJOS. Des Weiteren gibt es ActiveX-Elemente, mit denen die Lego-Roboter
Neben Robolab und dem Robotics Invention System gibt es eine Vielzahl von Programmierumgebungen für Lego Mindstorms Roboter, z. B. NQC oder LEJOS. Des Weiteren gibt es ActiveX-Elemente, mit denen die Lego-Roboter
Inhaltsverzeichnis. Vorwort NXTundNXC DerNXT NXC Not exactly C Compiler Zusammenfassung 17
 Vorwort 13 1 NXTundNXC 15 1.1 DerNXT 15 1.2 NXC 16 1.2.1 Not exactly C 16 1.2.2 Compiler 17 1.2.3 Zusammenfassung 17 2 BricxCC 19 2.1 Installation 19 2.2 Oberfläche 20 2.3 Menüleiste 22 2.3.1 Datei 22
Vorwort 13 1 NXTundNXC 15 1.1 DerNXT 15 1.2 NXC 16 1.2.1 Not exactly C 16 1.2.2 Compiler 17 1.2.3 Zusammenfassung 17 2 BricxCC 19 2.1 Installation 19 2.2 Oberfläche 20 2.3 Menüleiste 22 2.3.1 Datei 22
Aufgabe spshaus Übung P1
 Aufgabe spshaus Übung P1 WC-Steuerung Teil 1 Nummer P1 Bezeichnung WC-Steuerung Teil 1 Übungsart praktisch theoretisch Lernziele IEC-Timer Remanenz von statischen Variablen Funktionsbaustein mit Formalparametern
Aufgabe spshaus Übung P1 WC-Steuerung Teil 1 Nummer P1 Bezeichnung WC-Steuerung Teil 1 Übungsart praktisch theoretisch Lernziele IEC-Timer Remanenz von statischen Variablen Funktionsbaustein mit Formalparametern
Bedienungsanleitung Move IQ
 Bedienungsanleitung Move IQ Der Move IQ 1. LCD-Bildschirm 2. Home Taste: Bestätigen / Ansicht wechseln 3. Zurücktaste: Zurückblättern 4. Vortaste: Vorblättern 5. Power Taste: Gerät An / Ausschalten & Hintergrundbeleuchtung
Bedienungsanleitung Move IQ Der Move IQ 1. LCD-Bildschirm 2. Home Taste: Bestätigen / Ansicht wechseln 3. Zurücktaste: Zurückblättern 4. Vortaste: Vorblättern 5. Power Taste: Gerät An / Ausschalten & Hintergrundbeleuchtung
VITA Easyshade V Neue Funktionen Update Version 507h
 1. Aktive Schaltflächen im Menüpunkt Informationen zum VITA Easyshade V Wenn Sie im Hauptmenü auf das -Symbol tippen, gelangen Sie zu den Geräteinformationen. Dort werden Datum und Uhrzeit, Seriennummer,
1. Aktive Schaltflächen im Menüpunkt Informationen zum VITA Easyshade V Wenn Sie im Hauptmenü auf das -Symbol tippen, gelangen Sie zu den Geräteinformationen. Dort werden Datum und Uhrzeit, Seriennummer,
Kurzanleitung für den MyDrive Client
 Kurzanleitung für den MyDrive Client Hinweis: Prüfen bei Problemen zuerst, ob eine neuere Version vorhanden ist und installieren Sie diese. Version 1.1 - Kopieren von einzelnen Files innerhalb von MyDrive
Kurzanleitung für den MyDrive Client Hinweis: Prüfen bei Problemen zuerst, ob eine neuere Version vorhanden ist und installieren Sie diese. Version 1.1 - Kopieren von einzelnen Files innerhalb von MyDrive
Anleitung zur Bluetooth -Inbetriebnahme für Lactate Scout+ Diagnostics for life
 Anleitung zur Bluetooth -Inbetriebnahme für Lactate Scout+ Diagnostics for life Variante A: Installation unter Windows 7 1. Stellen Sie zunächst sicher, dass der PC über die erforderliche Bluetooth - Hardware
Anleitung zur Bluetooth -Inbetriebnahme für Lactate Scout+ Diagnostics for life Variante A: Installation unter Windows 7 1. Stellen Sie zunächst sicher, dass der PC über die erforderliche Bluetooth - Hardware
Technologie. Bluetooth einsetzen
 Bluetooth einsetzen Bluetooth ist eine Kommunikationstechnologie, mit der ohne übertragende Leitungen Daten gesendet oder empfangen werden können. Mit den Bluetooth-Funktionen kannst du eine drahtlose
Bluetooth einsetzen Bluetooth ist eine Kommunikationstechnologie, mit der ohne übertragende Leitungen Daten gesendet oder empfangen werden können. Mit den Bluetooth-Funktionen kannst du eine drahtlose
Your EdVenture into Robotics Infos
 Your EdVenture into Robotics Infos Die Unterrichtspläne wurden in Zusammenarbeit mit RoboticsWPS erstellt. Übersetzt wurde sie durch das Institut für Weiterbildung und Medienbildung, PHBern Cornelia Fahrni-Epprecht,
Your EdVenture into Robotics Infos Die Unterrichtspläne wurden in Zusammenarbeit mit RoboticsWPS erstellt. Übersetzt wurde sie durch das Institut für Weiterbildung und Medienbildung, PHBern Cornelia Fahrni-Epprecht,
Kurzanleitung Hama Photokalender v
 Inhalt 1. Vorwort / Installation 2. Software- / Druckereinstellungen 3. Symbole und Objekte 1. Vorwort / Installation Hama Photokalender ist ein einfaches, leicht anzuwendendes Programm zum erstellen individueller
Inhalt 1. Vorwort / Installation 2. Software- / Druckereinstellungen 3. Symbole und Objekte 1. Vorwort / Installation Hama Photokalender ist ein einfaches, leicht anzuwendendes Programm zum erstellen individueller
PE 08 Bedienungsanleitung D-
 PE108 Bedienungsanleitung D- D- INHALTSVERZEICHNIS A. Funktionen 5 B. Die Betriebsart wechseln 9 C. Die Betriebsart Zeit 10 D. Den Schrittzähler benutzen 12 E. Den Schrittzähler tragen 15 F. Das Schrittziel
PE108 Bedienungsanleitung D- D- INHALTSVERZEICHNIS A. Funktionen 5 B. Die Betriebsart wechseln 9 C. Die Betriebsart Zeit 10 D. Den Schrittzähler benutzen 12 E. Den Schrittzähler tragen 15 F. Das Schrittziel
Ein Map aus der ECU lesen bzw. ein anderes Map auf die ECU laden:
 Achtung!! TuneECU für Windows, auf keinen Fall an der Triumph Explorer, der neuen Trophy, der Street Triple ab Modell 2013, der Daytona675 ab Modell 2013 und der Thunderbird, Modelle Commander & LT verwenden.
Achtung!! TuneECU für Windows, auf keinen Fall an der Triumph Explorer, der neuen Trophy, der Street Triple ab Modell 2013, der Daytona675 ab Modell 2013 und der Thunderbird, Modelle Commander & LT verwenden.
CRecorder Bedienungsanleitung
 CRecorder Bedienungsanleitung 1. Einführung Funktionen Der CRecorder zeichnet Istwerte wie unter anderem Motordrehzahl, Zündzeitpunkt, usw. auf und speichert diese. Des weiteren liest er OBDII, EOBD und
CRecorder Bedienungsanleitung 1. Einführung Funktionen Der CRecorder zeichnet Istwerte wie unter anderem Motordrehzahl, Zündzeitpunkt, usw. auf und speichert diese. Des weiteren liest er OBDII, EOBD und
DOKUMENTATION W&Z-MESSWERTERFASSUNG
 - 1 - DOKUMENTATION W&Z-MESSWERTERFASSUNG FÜR EINZELMESSUNG - 1 - DOKUMENTATION W&Z-MESSWERTERFASSUNG EINZELMESSUNG W&Z-COMPUTER-VERTRIEB GMBH DEUBENER STR. 14 01159 DRESDEN TELEFON: 0351 4219125 FAX:
- 1 - DOKUMENTATION W&Z-MESSWERTERFASSUNG FÜR EINZELMESSUNG - 1 - DOKUMENTATION W&Z-MESSWERTERFASSUNG EINZELMESSUNG W&Z-COMPUTER-VERTRIEB GMBH DEUBENER STR. 14 01159 DRESDEN TELEFON: 0351 4219125 FAX:
2. Teil: Programmierung der Roboter
 ,, 2. Teil: Programmierung der Lego Mindstorms Schulprojekt der Technischen Universität Dänemark Technische Universität Dänemark Institut für Mathematik Januar 2008 , Der Labyrinth- Wettbewerb Lego Mindstorms
,, 2. Teil: Programmierung der Lego Mindstorms Schulprojekt der Technischen Universität Dänemark Technische Universität Dänemark Institut für Mathematik Januar 2008 , Der Labyrinth- Wettbewerb Lego Mindstorms