PDV Vertiefung Sommersemester 2006 Das Inverse Pendel
|
|
|
- Elizabeth Diefenbach
- vor 7 Jahren
- Abrufe
Transkript
1 PDV Vertiefung Sommersemester 2006 Das Inverse Pendel Mathias Zappey Hüseyin Özballar
2 Inhaltsverzeichnis 1. Aufgabenstellung Versuchsaufbau Motoren und H-Brücke PICDEM2 Plus Demo Board Microchip IDE und C Compiler In Circuit Debugger Algorithmus Aufpendeln Regelung Probleme und Lösungen Quellen...22
3 1. Aufgabenstellung Mit Hilfe eines Mikrocontrollers, der einen motorgetriebenen Druckerschlitten ansteuert, sollte ein an dem Druckerschlitten angebrachtes Pendel in eine senkrechte Position gebracht werden. Hat das Pendel die gewünschte Position erreicht, soll der Mikrocontroller die Steuerung des Druckerschlittens beenden bzw. unterbrechen. Zur Steuerung des Motors wird dabei der Mikrocontroller bzw. PIC (Programable Interrupt Controller) 18F452 der Firma Microchip verwendet. Der PIC wurde mit Hilfe der IDE (Integrated Developement Environment) MPLAB, über einen sogenannten ICD (In Circuit Debugger) programmiert. Eine Platine der Bauart PICDEM2 Demo Board, ebenfalls von der Firma Microchip stellt dabei die Schnittstelle zwischen der Entwicklungsumgebung und dem PIC dar. Durch einen Regelalgorithmus wird der Motor des Druckerschlittens so angesteuert, dass ein Kippen des Pendels nach links oder rechts abgefangen wird und das Pendel auf diese Weise früher oder später im Gleichgewicht bleibt und in einer senkrechten Position zum stehen kommt.

4 2. Versuchsaufbau Das Projekt besteht im wesentlichen aus dem Innenleben eines alten Druckers. Dabei ist auf dem Druckerschlitten, der von einem Motor angetrieben wird ein weiterer Motor angebracht, der jedoch nur zum Auslesen des Pendelwinkels durch die in ihm befindlichen Lichtschranken benutzt wird und den wir nicht ansteuern. Des Weiteren wird zur Ansteuerung des Motors ein Regelalgorithmus verwendet, mit dem ein PIC programmiert ist, der sich auf einer Platine PICDEM2 Plus Demo Board der Firma Microchip befindet. Um die Laufrichtung des Motors beeinflussen zu können wurde zusätzlich eine H-Brücke zwischengeschaltet, die sich auf einer separaten Platine befindet.
5 3. Motoren und H-Brücke Der Motor zum Antrieb des Druckerschlittens wird mit 17 Volt angetrieben. Der Typ des Motors ist nicht näher bekannt. Um die Position des Druckerschlittens zu bestimmen bzw. diesen zu kalibrieren, zählen wir die Interrupts, die durch auslesen der Lichtschranken des Motors bestimmt werden können. Die Kalibrierung des Druckerschlittens erfolgt dabei nach folgendem Schema: - Bei Neustart fährt der Motor an das Ende der Druckerschiene. Um das Ende der Druckerschiene erkennen zu können wird festgestellt ob noch Interrupts gezählt werden oder nicht. Ist dies nicht der Fall, wissen wir, dass das Ende der Schiene erreicht ist. - Ab diesem Punkt lassen wir den Motor in die entgegen gesetzte Richtung laufen und zählen die Interrupts bis der Motor am anderen Ende angekommen ist, was nach der oben bereits erwähnten Methode festgestellt wird. - Anschließend lassen wir den Motor um die Hälfte der Interrupts in die wiederum entgegen gesetzte Richtung laufen und haben somit den Druckerschlitten auf halber Länge der Schiene platziert. Der Druckerschlitten ist somit kalibriert. Codefragment: for(i=0;i<=2;i++) while(1) if(tick>=globalticks) pwmoff(); richtung^=1; pwmon(300); break; tick=globalticks; Delay1KTCYx(0); if(i==1) count=globalticks; if(i==2) count=globalticks-count; globalticks = 0; while(globalticks<=(count/2); pwmoff(); richtung^=1;
6 Die H-Brücke ist auf einer seperaten Platine angebracht und regelt die Laufrichtung des Motors. Sie ist mit den Ports RC1 bzw. RC2 der PICDEM2 Plus Platine verbunden. Die H-Brücke besitzt drei Steuereingänge: PWM, DIRECTION und BRAKE. Von den Steuereingängen benutzen wir jedoch lediglich den für die PWM und den für DIRECTION. Das Anhalten des Motors wird über eine Richtungsänderung mit anschliessendem Ausschalten der PWM realisiert. Die Richtung wird dabei über PORT RC1 der PICDEM2 Plus Platine angesprochen. Soll sie geändert werden wird das erste Bit an PORT RC1 lediglich getoggelt. #define richtung richtung^=1; PORTCbits.RC1 // ändern der Laufrichtung Die PWM hingegen ist an PORT RC2 der Platine angeschlossen und wird über die Funktionen pwmon(int pwm) bzw. pwmoff() angesprochen. Somit können wir pwmon einen Wert übergeben, der die Pulsweite festlegt. Um die Pulsweite voll auszuschöpfen müssen wir pwmon den Wert 1000 übergeben. Bei 0 ist das Minimum der Pulsweite erreicht. Um die Ansteuerung des Motors ganz abzuschalten rufen wir einfach die Funktion pwmoff() auf. #define PWM void pwmon(int x) // PWM erzeugen OpenPWM1(0xff); SetDCPWM1(x); void pwmoff(void) // PWM löschen ClosePWM1(); PORTCbits.RC2 Der PIC18F452 Microcontroller bietet zwei unabhängige PWM-Kanäle an. Der eine ist fest auf RC2 geschaltet (PWM1), der andere kann über ein Configuration-Bit auf RB3 oder RC1 gelegt werden (PWM2). Mit OpenPWMx() bzw. ClosePWMx() kann die Pulsweitenmodulation en-/disabled werden. OpenPWMx() wird noch die Periodendauer als Parameter übergeben.setdcpwmx() stellt den eigentlichen PWM-Wert ein. Hierfür kann ein Int- Wert übergeben werden. Der Wertebereich liegt bei 2 10 also zwischen 0 und 1023.
7 SetOutputPWMx() wird von unserem Prozessor nicht unterstützt.x steht jeweils für 1 oder 2 also den jeweiligen PWM-Kanal.PWM setzt das öffnen von Timer2 voraus.zu inkludierendes Header File: pwm.h H-Brücke:
 2.")
8 4. PICDEM2 PLUS Demo Board Das PICDEM2 Plus Demo Board ist eine Platine, die sich für PIC16- bzw. PIC18- Prozessoren eignet. Der Prozessor wird über die Platine mit der Peripherie verbunden. Die Platine an sich besitzt eine Schnittstelle, die es dem Anwender ermöglicht den Prozessor zu programmieren , 28 und 40-Pin DIP Sockel (nur ein Sockel darf jeweils besetzt sein) 2. On-board +5V Wandler für 9V, 100 ma AC/DC Netzteil, 5V DC Eingang, Steckplatz für 9V Batterie 3. RS-232 Schnittstelle 4. In-Circuit Debugger (ICD) Buchse 5. 5 KiloOhm Potentiometer für analogen Input 6. 3 Schalter (2 frei belegbar, 1 Reset-Schalter) 7. Grünes PowerON LED 8. Vier Rote LEDs (über PORTB steuerbar) 9. Jumper J6 um LEDs zu deaktivieren MHz Quarz Oszillator

9 11. Freier Platz für Quarz Anschluss khz Quarz für Timer1 Clock 13. Jumper J7 um on-board RC Oszillator zu aktivieren (ca. 2 MHz) K x 8 Serial EEPROM. 15. LCD Display. 16. Buzzer. 17. Platz für Benutzer Hardware 18. Microchip TC74 Thermometer PIC 18F452: In unserem Fall befindet sich ein PIC (Programmable Interrupt Controller) der Bauart 18F452 auf der Platine, der zur Ansteuerung des Motors und zum verarbeiten der unterschiedlichen Signale programmiert werden kann. Der PIC18F452 ist ein Microcontroller der Firma Microchip. Es handelt sich um einen RISC-Prozessor mit folgendem Speicheraufbau: Eine Trennung zwischen Programm- und Datenspeicher ist also vorgesehen, auch wenn es möglich ist Daten im Programmspeicher abzulegen. Der Data EEPROM Speicher ist optimiert für schnellen Datenzugriff und häufige Datenänderungen. Er kann über vier spezielle Register angesprochen werden: EECON1 EECON2 EEDATA
. Diese haben konfigurierbare Zusatzfunktionen.")
10 EEADR Normale Variablen werden im On-Chip RAM abgelegt. Der Prozessor arbeitet mit einer Taktfrequenz von 40 MHz. Der PIC18F452 verfügt über eine Reihe von I/O-Pins (RA-Port:RE-Port). Diese haben konfigurierbare Zusatzfunktionen. Beispielsweise kann ein bestimmter Pin wahlweise als Digitaler Ein-/Ausgang oder als Interrupt-Eingang dienen.

11 Schaltbild:

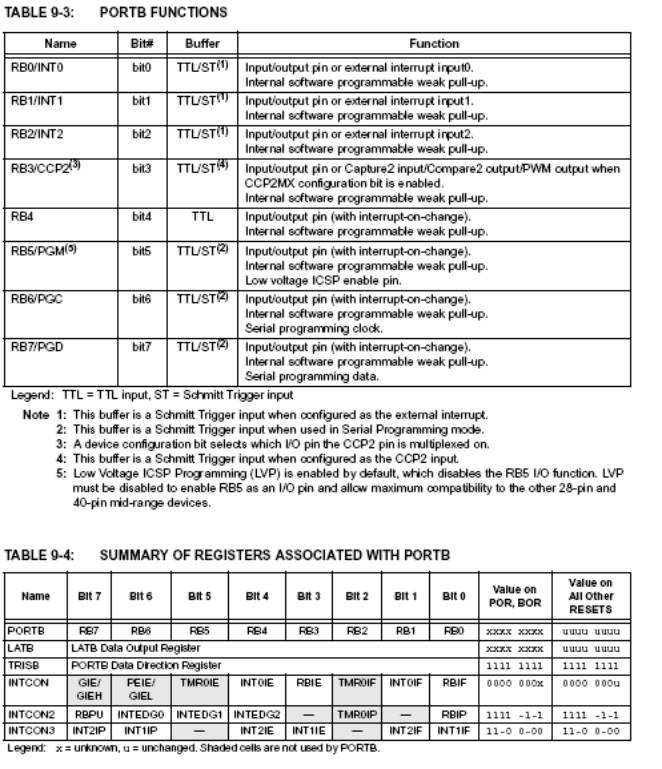
12 Die Portbelegung des 18F452 wird im Folgenden genauer dargestellt. Für unser Projekt waren vor allem Port C für die Pulsweitenmodulation sowie Port A für das Interrupt-Handling von bedeutung.
13

14

15

16 Da einige Ports des PICDEM2 Plus Boards bereits vorbelegt sind,beispielsweise mit den LEDs oder dem Buzzer muss man sich also überlegen, welche Teile der Peripherie man benötigt undauf welche man verzichten kann.
 verwenden wir in der Version 7.31.")
17 5. Microchip IDE und C Compiler Micochip bietet zu den eigenen Prozessoren (PICmicro MCUs) die MPLAB IDE an. Diese Windows basierte Entwicklungsumgebung (Integrated Development Environment) verwenden wir in der Version Sie beinhaltet die beiden sogenannten LanguageTools MPASM und MPLINK: Assembler und Linker. Die entsprechenden Programme können auch als Command Line-Tools gestartet werden. Die IDE bietet darüber hinaus folgende Features: - Quelltexteditor - Kompilieren, Assemblieren und Linken - Programmieren des Controllers - Debuggen mit Breakpoints und Einzelschrittmodus - Auslesen und Speichern der aktuellen Prozessorprogrammierung als Binärfile - Anzeigen der Speicherinhalte - Anzeigen/Überwachen von Registern - Setzen von Konfigurationsbits - Verwalten von sog. Projekten/Workspace

18 6. In Circuit Debugger Für Debugging und Programmierung ist der sogenannte In-Circuit-Debugger von Nöten. Dieser wird mittels USB zwischen Platine und PC geschaltet. Mit der Microchip Entwicklungsumgebung kann nun der Prozessor programmiert bzw. die Software gedebuggt werden. Zum Debuggen muss man zunächst den Prozessor Programmieren. Danach kann man das Programm im Debug-Modus starten. Hierbei muss die Platine ständig mit dem ICD verbunden bleiben.
19 7. Algorithmus Der Algorithmus zur Steuerung des Motors und der damit verbundenen Stabilisierung des Pendels besteht im wesentlichen aus drei Teilen: 1. Kalibrierung des Druckerschlittens (s. oben) 2. Aufschwung des Pendels 3. Regelung des Pendelausschlags Da die Kalibrierung des Druckerschlittens bereits oben erwähnt und geschildert wurde, wird an dieser Stelle nicht nochmals darauf eingegangen werden. Im Folgenden wird nun die Aufschwungphase und die Regelung des Algorithmus näher beleuchtet. 7.1 Aufschwung des Pendels Die Aufschwungphase des Pendels ist durch eine rhythmische Hin- und Herbewegung gekennzeichnet, die das Pendel auf ein Niveau bringt, bei dem anschließend der Regelalgorithmus einsetzt und das Pendel stabilisiert, bis es letztlich eine Position einnimmt, in der es sich im Gleichgewicht befindet und die Motorsteuerung des Druckerschlittens abgeschaltet wird. Während der Aufschwungphase bricht das Pendel also jeweils in die eine oder andere Richtung aus wobei es beim Durchlauf des Nullpunktes (Punkt, an dem das Pendel senkrecht nach unten hängt) mittels der PWM einen Impuls bekommt, der es stärker in die entgegen gesetzte Richtung treibt. Hat das Pendel eine gewisse Höhe erreicht setzt der Regelalgorithmus ein. while(1) degree = globaldeg % 1008; if(degree < 0) degree += 1008; if((degree > 1000) (degree < 8)) pwmon(420); globalticks=0; while(1) if(globalticks >= 400) pwmoff();
20 richtung^=1; break; if((degree > 480) && (degree < 520)) break; 7.2 Regelung Zuerst wird der Winkel des Pendels bestimmt. Danach wird die Pulsweite eingestellt. In unserem fall haben wird dazu eine einfache Geradengleichung genommen.: PWM = m * alpha + b Dabei ist m die Steigung und b die Verschiebung der Geraden. Alpha gibt den Winkel des Pendels an. Anschließend stellen wir fest, ob das Pendel sich im regelbaren Bereich befindet. Mit Hilfe einer definierten toten Zone (Bereich, in welchem die Pulsweitenmodulation ausgeschaltet wird) ist der Endzustand, nämlich das Pendel in aufrechter Position im labilen Gleichgewicht erreicht. Um diesen Zustand zu bekommen gehen wir folgendermaßen vor: - Fällt das Pendel von rechts kommend nach links wird die Drehrichtung des Motors erst dann gewechselt, wenn das Pendel ein Grad über den Nullpunkt hinweg fällt. - Das Selbe geschieht in umgekehrter Richtung. while(1) // Auslesen des Winkels degree = globaldeg % 1008; if(degree < 0) degree = 1008+degree; // Einstellen der PWM pwm = 3 * degree - 600; // Überprüfung ob regelbarer Zustand if(degree > 498 && degree < 510) pwmoff(); richtung^=1; continue; // überprüfen ob Pendel von links oder rechts kommend if(degree > 400 && degree < 600) if(degree > 404) flag = 1; if(degree < 504)
21 else flag = 2; flag = 0; // Richtungswechsel des Motors if((degree > 504) && (flag ==1)) pwmon(pwm); richtung &= 0; continue; // Richtungswechsel des Motors if((degree < 504) && (flag ==0)) pwmon(pwm); richtung = 1; continue; if(flag == 2) pwmoff(); richtung^=1;
22 8. Probleme und Lösungen Im Laufe der Programmierung des Regelalgorithmus traten diverse Probleme auf, die nicht ganz trivial zu lösen waren. Zum Einen gab es ein Flattern, das immer dann auftrat, wenn das Pendel bzw. der Versuchsaufbau durch z.b. wackeln am Tisch oder Vibrationen beeinflusst wurde, zum Anderen gingen uns anfangs immer wieder Interrupts verloren, d.h sie wurden nicht gezählt. Flattern : Zum auslesen der Interrupts wurden zwei Rechtecksignale ausgelesen, die 90 zueinander versetzt waren: Dabei wurde mit dem oberen Signal die Interrupts ausgelöst und anhand des unteren Signals festgestellt in welche Richtung sich das Pendel bewegte. Flattern beschreibt die Situation, in der sich das Pendel zwischen den zwei Linien bewegt. Es ensteht somit der Eindruck, dass sich das Pendel kontinuirlich weiter dreht, es in Wirklichkeit jedoch an der selben Stelle hin und her zittert. Gelöst wurde dieses Problem dadurch, dass im INTCON2 Register das Bit INTEDG1 bei jedem Interrupt getoggelt wurde. Durch das Toggeln wurde sicher gestellt, dass erst die
23 nächste abfallende Flanke gezählt wurde und es somit nicht mehr möglich war zwei aufsteigende Flanken hintereinander zu zählen. Verlorene Interrupts: Durch Messungen ergab sich, dass das Eingangssignal einer Lichtschranke nicht sauber schaltete. Die Messung ergab eine Kurve, typisch für das Aufladen eines Kondensators. Nach Analyse des Schaltplans stellten wir fest, dass en Kondensator zum Entprellen eines Schalters parallel an unserem Interrupt-Port hing. Durch abklemmen des Widerstandes R19, der in Reihe mit dem Kondensator geschaltet war es fortab möglich das Signal sauber auszulesen.
24 9.Quellen Microchip PIC18FXX2 Data Sheet Microchip MPLAB IDE v.7 Quick Start Guide Microchip MPLAB C18 C Compiler User s Guide Microchip MPLAB C18 C Compiler Libraries Microchip PICDEM2 Plus User s Guide Microchip MPLAB ICD 2 In Circuit Debugger User s Guide
Microcontroller Programmierung. Ein PDV-Vertiefungsprojekt von: Chr. Schulz, P. Simon und D. Stein Sommersemester 2005 Version 1.0
 Microcontroller Programmierung Ein PDV-Vertiefungsprojekt von: Chr. Schulz, P. Simon und D. Stein Sommersemester 2005 Version 1.0 Inhalt Einführung Die Hardware Die Schaltlogik Implementierung der Steuerung
Microcontroller Programmierung Ein PDV-Vertiefungsprojekt von: Chr. Schulz, P. Simon und D. Stein Sommersemester 2005 Version 1.0 Inhalt Einführung Die Hardware Die Schaltlogik Implementierung der Steuerung
Anwendungen der Prozessdatenverarbeitung (Liste V) Leitung: Prof. Dr. Linn. Microcontroller Programmierung
 Leitung: Prof. Dr. Linn. Microcontroller Programmierung") Anwendungen der Prozessdatenverarbeitung (Liste V) Microcontroller Programmierung Technisches Handbuch Christoph Schulz Patrik Simon Dirk Stein Sommersemester 2005 INHALTSVERZEICHNIS Einführung - 2 - Pinbelegung
Anwendungen der Prozessdatenverarbeitung (Liste V) Microcontroller Programmierung Technisches Handbuch Christoph Schulz Patrik Simon Dirk Stein Sommersemester 2005 INHALTSVERZEICHNIS Einführung - 2 - Pinbelegung
ATmega169 Chip: Pin-Layout
 ATmega169 Chip: Pin-Layout Die logische Schnittstelle der Funktionseinheit MCU (Microcontroller Unit) entspricht der physikalischen Schnittstelle der Baueinheit (Chip). Für die Maschinenbefehle sind nur
ATmega169 Chip: Pin-Layout Die logische Schnittstelle der Funktionseinheit MCU (Microcontroller Unit) entspricht der physikalischen Schnittstelle der Baueinheit (Chip). Für die Maschinenbefehle sind nur
Remote-Objekt-Überwachung. von Jan Schäfer und Matthias Merk
 Remote-Objekt-Überwachung von Jan Schäfer und Matthias Merk Aufgabenstellung Steuerung von Sensoren zur Remote Objektüberwachung mit einem µc PIC16F874. Welcher Sensor hat gemeldet? Die Überwachung Mehrere
Remote-Objekt-Überwachung von Jan Schäfer und Matthias Merk Aufgabenstellung Steuerung von Sensoren zur Remote Objektüberwachung mit einem µc PIC16F874. Welcher Sensor hat gemeldet? Die Überwachung Mehrere
Entwicklungsboard 16F1824
 Entwicklungsboard 16F1824 Inhaltsverzeichnis 1. Einleitung...2 2. Grundlegende Eigenschaften...2 2.1 Grundlegende Eigenschaften...2 2.2 Optionale Eigenschaften...3 3. Programmierung...3 4. Hardware...5
Entwicklungsboard 16F1824 Inhaltsverzeichnis 1. Einleitung...2 2. Grundlegende Eigenschaften...2 2.1 Grundlegende Eigenschaften...2 2.2 Optionale Eigenschaften...3 3. Programmierung...3 4. Hardware...5
Mini- Mikroprozessor-Experimentier-System. Version 1.0b vom :21. mit einem 8051-Mikrocontroller
 Mini- Mikroprozessor-Experimentier-System mit einem 8051-Mikrocontroller Version 1.0b vom 04.10.2004 14:21 Inhalt 1 Einleitung...3 2 Hardware...4 2.1 Übersicht...4 2.2 Mikrocontroller AT89C51RB2...5 2.3
Mini- Mikroprozessor-Experimentier-System mit einem 8051-Mikrocontroller Version 1.0b vom 04.10.2004 14:21 Inhalt 1 Einleitung...3 2 Hardware...4 2.1 Übersicht...4 2.2 Mikrocontroller AT89C51RB2...5 2.3
Basisplatine PIC-Basis-V42. Abbildung: Features : PIC Programmier- und Übungsmodule. Basismodul. Best.-Nr
 PIC Programmier- und Übungsmodule Basismodul Basisplatine PIC-Basis-V42 Best.-Nr. 5035-3206 Auf dem Schellerod 22 D-53842 Troisdorf Postfach 1263 D-53822 Troisdorf Telefon (02241) 4867-29 Telefax (02241)
PIC Programmier- und Übungsmodule Basismodul Basisplatine PIC-Basis-V42 Best.-Nr. 5035-3206 Auf dem Schellerod 22 D-53842 Troisdorf Postfach 1263 D-53822 Troisdorf Telefon (02241) 4867-29 Telefax (02241)
Anwendung der Prozessdatenverarbeitung SS2008
 Anwendung der Prozessdatenverarbeitung SS2008 FH Wiesbaden Informatik Prof. Dr. Karl Otto Linn Das Inverse Pendel Wolfgang Röttges Peter Großmann 1 Einleitung Physikalisch gesehen gibt es in der Natur
Anwendung der Prozessdatenverarbeitung SS2008 FH Wiesbaden Informatik Prof. Dr. Karl Otto Linn Das Inverse Pendel Wolfgang Röttges Peter Großmann 1 Einleitung Physikalisch gesehen gibt es in der Natur
Inhaltsverzeichnis VII
 Inhaltsverzeichnis 1 Grundlagen der Mikrocontroller... 1 1.1 Mikrocontroller-Familie ATtiny2313, ATtiny26 und ATmega32.... 6 1.1.1 Merkmale des ATtiny2313, ATtiny26 und ATmega32..... 8 1.1.2 Pinbelegung
Inhaltsverzeichnis 1 Grundlagen der Mikrocontroller... 1 1.1 Mikrocontroller-Familie ATtiny2313, ATtiny26 und ATmega32.... 6 1.1.1 Merkmale des ATtiny2313, ATtiny26 und ATmega32..... 8 1.1.2 Pinbelegung
Einführung in die Microchip PIC-Controller vergleichende Betrachtung zu anderen Microcontrollern CLUG 12.2.2016. Matthias Kupfer
 Einführung in die Microchip PIC-Controller vergleichende Betrachtung zu anderen Microcontrollern CLUG 12.2.2016 Matthias Kupfer maku@kupfer-it.de 1 Übersicht Überblick über Microchip PIC-Familie Eigenschaften
Einführung in die Microchip PIC-Controller vergleichende Betrachtung zu anderen Microcontrollern CLUG 12.2.2016 Matthias Kupfer maku@kupfer-it.de 1 Übersicht Überblick über Microchip PIC-Familie Eigenschaften
Die AVR Mikrocontrollerfamilie
 AKES - Ausgewählte Kapitel eingebetteter Systeme 10. Mai 2006 Übersicht über den Vortrag Was sind AVRs? 2/35 Anwendungsfelder Übersicht über den Vortrag Mikrocontroller 3/35 Kleiner Chip Viel integrierte
AKES - Ausgewählte Kapitel eingebetteter Systeme 10. Mai 2006 Übersicht über den Vortrag Was sind AVRs? 2/35 Anwendungsfelder Übersicht über den Vortrag Mikrocontroller 3/35 Kleiner Chip Viel integrierte
LED Skalenbeleuchtung mit einem Arduino
 Projektteil: LED Skalenbeleuchtung mit einem Arduino Aufgaben: - Ein Taster schaltet die LED-Beleuchtung ein - Nach Ablauf einer im Programm hinterlegten Zeit schaltet sich die Beleuchtung von selbst wieder
Projektteil: LED Skalenbeleuchtung mit einem Arduino Aufgaben: - Ein Taster schaltet die LED-Beleuchtung ein - Nach Ablauf einer im Programm hinterlegten Zeit schaltet sich die Beleuchtung von selbst wieder
Wie in der Skizze zu sehen ist, bleibt die Periodendauer / Frequenz konstant und nur die Pulsweite ändert sich.
 Kapitel 2 Pulsweitenmodulation Die sogenannte Pulsweitenmodulation (kurz PWM) ist ein Rechtecksignal mit konstanter Periodendauer, das zwischen zwei verschiedenen Spannungspegeln oszilliert. Prinzipiell
Kapitel 2 Pulsweitenmodulation Die sogenannte Pulsweitenmodulation (kurz PWM) ist ein Rechtecksignal mit konstanter Periodendauer, das zwischen zwei verschiedenen Spannungspegeln oszilliert. Prinzipiell
Einführung in die Welt der Microcontroller
 Übersicht Microcontroller Schaltungen Sonstiges Einführung in die Welt der Microcontroller Übersicht Microcontroller Schaltungen Sonstiges Inhaltsverzeichnis 1 Übersicht Möglichkeiten Einsatz 2 Microcontroller
Übersicht Microcontroller Schaltungen Sonstiges Einführung in die Welt der Microcontroller Übersicht Microcontroller Schaltungen Sonstiges Inhaltsverzeichnis 1 Übersicht Möglichkeiten Einsatz 2 Microcontroller
Die Technik hinter IoT: Arduino, Raspberry Pi & Co.
 Die Technik hinter IoT: Arduino, Raspberry Pi & Co. Praxisbeispiele für den Hausgebrauch Uwe Steinmann MMK GmbH 25.-26. September 2017 Uwe Steinmann (MMK GmbH) Die Technik hinter IoT 25.-26. September
Die Technik hinter IoT: Arduino, Raspberry Pi & Co. Praxisbeispiele für den Hausgebrauch Uwe Steinmann MMK GmbH 25.-26. September 2017 Uwe Steinmann (MMK GmbH) Die Technik hinter IoT 25.-26. September
Einleitung Die Pins alphabetisch Kapitel 1 Programmierung des ATmega8 und des ATmega
 Einleitung... 11 Die Pins alphabetisch.... 12 Kapitel 1 Programmierung des ATmega8 und des ATmega328.... 15 1.1 Was Sie auf den nächsten Seiten erwartet... 19 1.2 Was ist eine Micro Controller Unit (MCU)?....
Einleitung... 11 Die Pins alphabetisch.... 12 Kapitel 1 Programmierung des ATmega8 und des ATmega328.... 15 1.1 Was Sie auf den nächsten Seiten erwartet... 19 1.2 Was ist eine Micro Controller Unit (MCU)?....
LED board EB
 LED board EB004-00-2 Inhalt 1. Über dieses Dokument...2 2. Allgemeine Information...3 3. Board-Layout...4 4. Schaltungsbeschreibung...5 Anhang 1 Schaltplan Copyright Matrix Multimedia Limited 2005 seite
LED board EB004-00-2 Inhalt 1. Über dieses Dokument...2 2. Allgemeine Information...3 3. Board-Layout...4 4. Schaltungsbeschreibung...5 Anhang 1 Schaltplan Copyright Matrix Multimedia Limited 2005 seite
8.1 Grundsätzlicher Aufbau der Beispiele
 107 8 Beispiele Nachdem nun viele theoretische Grundlagen gelegt wurden, kann man mit dem Programmieren eines Mikrocontrollers beginnen. In den folgenden Kapiteln werden verschiedene Möglichkeiten der
107 8 Beispiele Nachdem nun viele theoretische Grundlagen gelegt wurden, kann man mit dem Programmieren eines Mikrocontrollers beginnen. In den folgenden Kapiteln werden verschiedene Möglichkeiten der
Anwendungen der Prozessdatenverarbeitung. - Realisierung eines inverses Pendels - Jörg Schweitzer, Ronny Jopp, Justus Dörflinger F [1]
![Anwendungen der Prozessdatenverarbeitung. - Realisierung eines inverses Pendels - Jörg Schweitzer, Ronny Jopp, Justus Dörflinger F [1]](/thumbs/57/40563379.jpg "Anwendungen der Prozessdatenverarbeitung. - Realisierung eines inverses Pendels - Jörg Schweitzer, Ronny Jopp, Justus Dörflinger F [1]") Anwendungen der Prozessdatenverarbeitung - Realisierung eines inverses Pendels - Jörg Schweitzer, Ronny Jopp, Justus Dörflinger F [1] Inhalt 1. Einleitung 2. Projektbeschreibung 3. Hardware 4. Messen und
Anwendungen der Prozessdatenverarbeitung - Realisierung eines inverses Pendels - Jörg Schweitzer, Ronny Jopp, Justus Dörflinger F [1] Inhalt 1. Einleitung 2. Projektbeschreibung 3. Hardware 4. Messen und
LED Skalenbeleuchtung mit einem Arduino
 Projektteil: LED Skalenbeleuchtung mit einem Arduino Aufgaben: - Ein Taster schaltet die LED-Beleuchtung ein - Nach Ablauf einer im Programm hinterlegten Zeit schaltet sich die Beleuchtung von selbst wieder
Projektteil: LED Skalenbeleuchtung mit einem Arduino Aufgaben: - Ein Taster schaltet die LED-Beleuchtung ein - Nach Ablauf einer im Programm hinterlegten Zeit schaltet sich die Beleuchtung von selbst wieder
SB-002 DATASHEET SB-002 V1.00: 8051 MIKROCONTROLLERBOARD MIT AT89C5131A-M OHNE NETZTEIL. Dokument NR.: SB-002_Datasheet
 SB-002 DATASHEET Dokument NR.: SB-002_Datasheet SB-002 V1.00: 8051 MIKROCONTROLLERBOARD MIT AT89C5131A-M OHNE NETZTEIL P Bitte denken Sie an die Umwelt, bevor Sie diese Datei ausdrucken Inhaltsverzeichnis
SB-002 DATASHEET Dokument NR.: SB-002_Datasheet SB-002 V1.00: 8051 MIKROCONTROLLERBOARD MIT AT89C5131A-M OHNE NETZTEIL P Bitte denken Sie an die Umwelt, bevor Sie diese Datei ausdrucken Inhaltsverzeichnis
Infokarte: Snap4Arduino
 Infokarte: Snap4Arduino Ein Arduino-Projekt erstellen Um ein neues Arduino-Projekt in Snap4Arduino zu erstellen, wird das Programm geöffnet. Snap erzeugt automatisch ein neues Projekt. Soll ein bereits
Infokarte: Snap4Arduino Ein Arduino-Projekt erstellen Um ein neues Arduino-Projekt in Snap4Arduino zu erstellen, wird das Programm geöffnet. Snap erzeugt automatisch ein neues Projekt. Soll ein bereits
Rechnerarchitektur Atmega 32. 1 Vortrag Atmega 32. Von Urs Müller und Marion Knoth. Urs Müller Seite 1 von 7
 1 Vortrag Atmega 32 Von Urs Müller und Marion Knoth Urs Müller Seite 1 von 7 Inhaltsverzeichnis 1 Vortrag Atmega 32 1 1.1 Einleitung 3 1.1.1 Hersteller ATMEL 3 1.1.2 AVR - Mikrocontroller Familie 3 2 Übersicht
1 Vortrag Atmega 32 Von Urs Müller und Marion Knoth Urs Müller Seite 1 von 7 Inhaltsverzeichnis 1 Vortrag Atmega 32 1 1.1 Einleitung 3 1.1.1 Hersteller ATMEL 3 1.1.2 AVR - Mikrocontroller Familie 3 2 Übersicht
ATMega2560Controllerboard
 RIBU ELEKTRONIK VERSAND Mühlenweg 6. 8160 Preding. Tel. 017/64800. Fax 64806 Mail: office1@ribu.at. Internet: http://www.ribu.at ATMega560Controllerboard nur 66 x 40 mm große 4 fach Multilayer Platine
RIBU ELEKTRONIK VERSAND Mühlenweg 6. 8160 Preding. Tel. 017/64800. Fax 64806 Mail: office1@ribu.at. Internet: http://www.ribu.at ATMega560Controllerboard nur 66 x 40 mm große 4 fach Multilayer Platine
PICkit 2 / 3. Programmierung mit dem USB-Programmer PICkit2 bzw. PICkit3 (Microchip) AB-2011-01
 AB-2011-01") PICkit 2 / 3 Programmierung mit dem USB-Programmer PICkit2 bzw. PICkit3 (Microchip) AB-2011-01 In diesem Dokument wird ein Umbau beschrieben. Für die Funktion des Umbaus gibt es keine Garantie. Für durch
PICkit 2 / 3 Programmierung mit dem USB-Programmer PICkit2 bzw. PICkit3 (Microchip) AB-2011-01 In diesem Dokument wird ein Umbau beschrieben. Für die Funktion des Umbaus gibt es keine Garantie. Für durch
Selbstbau einer SMD Lötstation. (c) DL4JAL, Andreas Lindenau
 DL4JAL, Andreas Lindenau") Selbstbau einer SMD Lötstation (c) DL4JAL, Andreas Lindenau 29. Januar 2016 Ansicht der Lötstation Ansicht des Displays. L=Lötkolbentemperatur, T3=gespeicherte Temperatur Taste 3, ADC=A/D Wandler 10Bit
Selbstbau einer SMD Lötstation (c) DL4JAL, Andreas Lindenau 29. Januar 2016 Ansicht der Lötstation Ansicht des Displays. L=Lötkolbentemperatur, T3=gespeicherte Temperatur Taste 3, ADC=A/D Wandler 10Bit
BLUE line. Bedienungsanleitung zum M-Unit Experimentierboard. Innovative Technik. Tobias Regenhardt Grüner Weg Seulingen
 BLUE line Innovative Technik Bedienungsanleitung zum M-Unit Experimentierboard Stand: November 2003 Tobias Regenhardt Grüner Weg 6 37136 Seulingen Tel: 0175/2716591 e-mail: TobiasRegenhardt@web.de Vorwort
BLUE line Innovative Technik Bedienungsanleitung zum M-Unit Experimentierboard Stand: November 2003 Tobias Regenhardt Grüner Weg 6 37136 Seulingen Tel: 0175/2716591 e-mail: TobiasRegenhardt@web.de Vorwort
Klasse, Name : Datum : Rad l/r Linienfolger l/r Laderaum ATMEGA 128
 HTL_RoboterDKU.odt Übung : Arbeiten mit dem HTL Leonding Roboter Seite : 1 von 7 1. Roboter Peripherie Eingänge Ausgänge DIGITAL ANA- LG DATEN Taster Kante l/r Rad l/r Linienfolger l/r Laderaum Klappe
HTL_RoboterDKU.odt Übung : Arbeiten mit dem HTL Leonding Roboter Seite : 1 von 7 1. Roboter Peripherie Eingänge Ausgänge DIGITAL ANA- LG DATEN Taster Kante l/r Rad l/r Linienfolger l/r Laderaum Klappe
Servo-Modul Version
 Servo-Modul Version 1.0 24.06.2010 Mit dem Servo-Modul ist es möglich bis zu 8 Modellbau-Servos (analoges Signal) an zu steuern. Die Ansteuerung kann wahlweise über den I2C-Bus, einen COM-Port (RS232)
Servo-Modul Version 1.0 24.06.2010 Mit dem Servo-Modul ist es möglich bis zu 8 Modellbau-Servos (analoges Signal) an zu steuern. Die Ansteuerung kann wahlweise über den I2C-Bus, einen COM-Port (RS232)
Selbstgebauter, kompakter, Strom sparender, Mehrkanal- Datenlogger mit PICs
 Selbstgebauter, kompakter, Strom sparender, Mehrkanal- Datenlogger mit PICs Wettbewerb "Jugend Forscht" 2008 Lucas Jürgens (12 Jahre) Arbeitsgemeinschaft "Jugend Forscht" des Christian-Gymnasiums Hermannsburg
Selbstgebauter, kompakter, Strom sparender, Mehrkanal- Datenlogger mit PICs Wettbewerb "Jugend Forscht" 2008 Lucas Jürgens (12 Jahre) Arbeitsgemeinschaft "Jugend Forscht" des Christian-Gymnasiums Hermannsburg
simline Technische Beschreibung simcontrol5 Version 1.07 Modulbeschreibung Eigenschaften
 simline Technische Beschreibung simcontrol5 Version 1.07 Das simcontrol5 ist ein lokaler intelligenter Baustein aus der Reihe der simline Module. Die simline (Semi Industrial Moduls) ist eine Modulreihe
simline Technische Beschreibung simcontrol5 Version 1.07 Das simcontrol5 ist ein lokaler intelligenter Baustein aus der Reihe der simline Module. Die simline (Semi Industrial Moduls) ist eine Modulreihe
Parallel-IO. Ports am ATmega128
 Parallel-IO Ansteuerung Miniprojekt Lauflicht Ports am ATmega128 PortE (PE7...PE0) alternativ, z.b. USART0 (RS232) 1 Pin von PortC Port C (PC7...PC0) 1 Parallel-IO-Port "Sammelsurium" verschiedener Speicher
Parallel-IO Ansteuerung Miniprojekt Lauflicht Ports am ATmega128 PortE (PE7...PE0) alternativ, z.b. USART0 (RS232) 1 Pin von PortC Port C (PC7...PC0) 1 Parallel-IO-Port "Sammelsurium" verschiedener Speicher
Mikrocontroller in eigenen Hobbyprojekten nutzen
 PIC-Mikrocontroller Mikrocontroller in eigenen Hobbyprojekten nutzen - Mikrocontroller Definition und Historie - die PIC-Familie - Entwicklungssysteme - Programmierung - Softwareerstellung - Debugging
PIC-Mikrocontroller Mikrocontroller in eigenen Hobbyprojekten nutzen - Mikrocontroller Definition und Historie - die PIC-Familie - Entwicklungssysteme - Programmierung - Softwareerstellung - Debugging
80C535-Mikrocontroller-Board im Streichholzschachtelformat
 RIBU 18. A-8160 Weiz. Tel. 03172/64800. Fax 03172/64806 RIBUMühlgasse ELEKTRONIK VERSAND e-mail: office@ribu.at. Internet: http://www.ribu.at 80C535-Mikrocontroller-Board im Streichholzschachtelformat
RIBU 18. A-8160 Weiz. Tel. 03172/64800. Fax 03172/64806 RIBUMühlgasse ELEKTRONIK VERSAND e-mail: office@ribu.at. Internet: http://www.ribu.at 80C535-Mikrocontroller-Board im Streichholzschachtelformat
CU-R-CONTROL. Beschreibung zur Schaltung ATMega16-32+ISP MC-Controller Steuerung auf Basis ATMEL Mega16/32. Autor: Christian Ulrich
 Seite 1 von 10 CU-R-CONTROL Beschreibung zur Schaltung ATMega16-32+ISP MC-Controller Steuerung auf Basis ATMEL Mega16/32 Autor: Christian Ulrich Datum: 08.12.2007 Version: 1.00 Seite 2 von 10 Inhalt Historie
Seite 1 von 10 CU-R-CONTROL Beschreibung zur Schaltung ATMega16-32+ISP MC-Controller Steuerung auf Basis ATMEL Mega16/32 Autor: Christian Ulrich Datum: 08.12.2007 Version: 1.00 Seite 2 von 10 Inhalt Historie
Nicht nur zum Spielen geeignet Atmels AVR und AVR32 Xplain Evalkitserie sind die ideale Hardwareplattformen für das neue AVR Studio 5
 Nicht nur zum Spielen geeignet Atmels AVR und AVR32 Xplain Evalkitserie sind die ideale Hardwareplattformen für das neue AVR Studio 5 Sie planen eine neue Applikation, wissen aber noch nicht, ob eine einfache
Nicht nur zum Spielen geeignet Atmels AVR und AVR32 Xplain Evalkitserie sind die ideale Hardwareplattformen für das neue AVR Studio 5 Sie planen eine neue Applikation, wissen aber noch nicht, ob eine einfache
C++ mit dem Arduino (Uno und Mega2560)
") C++ mit dem Arduino (Uno und Mega2560) 1. Toolchain Als toolchain bezeichnet man die Reihe von Software, die nötig ist um den Prozessor zu programmieren, das Ergebnis draufzuladen und dann zu testen. Hier
C++ mit dem Arduino (Uno und Mega2560) 1. Toolchain Als toolchain bezeichnet man die Reihe von Software, die nötig ist um den Prozessor zu programmieren, das Ergebnis draufzuladen und dann zu testen. Hier
Programmierübungen in Assembler
 Programmierübungen in Assembler 1. LED Ein-/Ausschalten Verwendet: Ports An Portpin P3.0 ist eine LED angeschlossen. An Portpin P1.0 ist ein Taster angeschlossen. a) Schreiben Sie ein Programm, welches
Programmierübungen in Assembler 1. LED Ein-/Ausschalten Verwendet: Ports An Portpin P3.0 ist eine LED angeschlossen. An Portpin P1.0 ist ein Taster angeschlossen. a) Schreiben Sie ein Programm, welches
Serie 8: Microcontroller 17./18.07.2014
 Serie 8: Microcontroller 17./18.07.2014 I. Ziel der Versuche Erster Erfahrungen mit einem Microcontroller sollen gesammelt werden, die grundlegenden Ein- Ausgabe-Operationen werden realisiert. II. Vorkenntnisse
Serie 8: Microcontroller 17./18.07.2014 I. Ziel der Versuche Erster Erfahrungen mit einem Microcontroller sollen gesammelt werden, die grundlegenden Ein- Ausgabe-Operationen werden realisiert. II. Vorkenntnisse
PicKit 3. Programmierung mit dem USB-Programmer PICkit3 (Microchip) AB-2010-04
 AB-2010-04") PicKit 3 Programmierung mit dem USB-Programmer PICkit3 (Microchip) AB-2010-04 In diesem Dokument wird ein Umbau beschrieben. Für die Funktion des Umbaus gibt es keine Garantie. Für durch diesen Umbau entstandene
PicKit 3 Programmierung mit dem USB-Programmer PICkit3 (Microchip) AB-2010-04 In diesem Dokument wird ein Umbau beschrieben. Für die Funktion des Umbaus gibt es keine Garantie. Für durch diesen Umbau entstandene
Der Mikrocontroller beinhaltet auf einem Chip einen kompletten Mikrocomputer, wie in Kapitel
 2 Der Mikrocontroller Der Mikrocontroller beinhaltet auf einem Chip einen kompletten Mikrocomputer, wie in Kapitel 1 beschrieben. Auf dem Chip sind die, ein ROM- für das Programm, ein RAM- für die variablen
2 Der Mikrocontroller Der Mikrocontroller beinhaltet auf einem Chip einen kompletten Mikrocomputer, wie in Kapitel 1 beschrieben. Auf dem Chip sind die, ein ROM- für das Programm, ein RAM- für die variablen
U5-2 Register beim AVR-µC
 U5 4. Übungsaufgabe U5 4. Übungsaufgabe U5-2 Register beim AVR-µC U5-2 Register beim AVR-mC Grundlegendes zur Übung mit dem AVR-µC 1 Überblick Register Beim AVR µc sind die Register: I/O Ports Interrupts
U5 4. Übungsaufgabe U5 4. Übungsaufgabe U5-2 Register beim AVR-µC U5-2 Register beim AVR-mC Grundlegendes zur Übung mit dem AVR-µC 1 Überblick Register Beim AVR µc sind die Register: I/O Ports Interrupts
BOOTLOADER für AVR-Entwicklungsmodule
 BOOTLOADER für AVR-Entwicklungsmodule mit ATxmega128A1 mit ATxmega256A3 Verzeichnis 1. Einleitung 3 2. Einstellungen 4 2.1. Fuse Bits 4 2.2. AVROSP Programm 5 2.2.1. Erläuterung der BAT-Dateien 5 2.2.2.
BOOTLOADER für AVR-Entwicklungsmodule mit ATxmega128A1 mit ATxmega256A3 Verzeichnis 1. Einleitung 3 2. Einstellungen 4 2.1. Fuse Bits 4 2.2. AVROSP Programm 5 2.2.1. Erläuterung der BAT-Dateien 5 2.2.2.
Jan Monsch. Donnerstag, 2. Mai 13
 101 Jan Monsch Agenda Arduino Platform Digitale Ausgaben Analoge Eingänge Digitale Eingaben I2C Geräte (Digitales Thermometer) Arduino SW Download goo.gl/dj5l2 Was ist Arduino? Open Source Einplatinen-Computer
101 Jan Monsch Agenda Arduino Platform Digitale Ausgaben Analoge Eingänge Digitale Eingaben I2C Geräte (Digitales Thermometer) Arduino SW Download goo.gl/dj5l2 Was ist Arduino? Open Source Einplatinen-Computer
Inhaltsverzeichnis VII.
 \ 1 Grundlagen der Mikrocontrolier 1 1.1 Mikrocontroller-Familie ATtiny2313, ATtiny26und ATmega32 6 1.1.1 Merkmale des ATtiny2313, ATtiny26und ATmega32 8 1.1.2 Pinbelegung des ATtiny2313, ATtiny26 und
\ 1 Grundlagen der Mikrocontrolier 1 1.1 Mikrocontroller-Familie ATtiny2313, ATtiny26und ATmega32 6 1.1.1 Merkmale des ATtiny2313, ATtiny26und ATmega32 8 1.1.2 Pinbelegung des ATtiny2313, ATtiny26 und
Elektrische Schnittstelle Signal
 Normen Europäischer Modellbahnen Elektrische Schnittstelle Signal NEM 692 Seite 1 von 6 Empfehlung Ausgabe 2011 1. Zweck der Schnittstelle Die Schnittstelle beschreibt für mechanische Signale und Lichtsignale
Normen Europäischer Modellbahnen Elektrische Schnittstelle Signal NEM 692 Seite 1 von 6 Empfehlung Ausgabe 2011 1. Zweck der Schnittstelle Die Schnittstelle beschreibt für mechanische Signale und Lichtsignale
Beschaltung eines Mikrocontrollers. Jordi Blanch Sierra Steuerungsgruppe
 Beschaltung eines Mikrocontrollers Jordi Blanch Sierra Steuerungsgruppe Gliederung Was ist ein Mikrocontroller? ATmega32 Pin-Beschreibung Grundschaltungen: - Minimale Grundschaltung - Grundschaltung mit
Beschaltung eines Mikrocontrollers Jordi Blanch Sierra Steuerungsgruppe Gliederung Was ist ein Mikrocontroller? ATmega32 Pin-Beschreibung Grundschaltungen: - Minimale Grundschaltung - Grundschaltung mit
Puls Weiten Modulation (PWM)
") Puls Weiten Modulation (PWM) Bei der Puls-Weiten-Modulation (PWM), wird ein digitales Ausgangssignal erzeugt, dessen Tastverhältnis moduliert wird. Das Tastverhältnis gibt das Verhältnis der Länge des
Puls Weiten Modulation (PWM) Bei der Puls-Weiten-Modulation (PWM), wird ein digitales Ausgangssignal erzeugt, dessen Tastverhältnis moduliert wird. Das Tastverhältnis gibt das Verhältnis der Länge des
Spannungsversorgung für Mikrocontroller-Schaltungen DH1AAD, Ingo Gerlach, 20.11.2011, e-mail : Ingo.Gerlach@onlinehome.de
 Spannungsversorgung für Mikrocontroller-Schaltungen DH1AAD, Ingo Gerlach, 20.11.2011, e-mail : Ingo.Gerlach@onlinehome.de Ziel Der Hintergrund für die Entwicklung diese Netzteiles war, das hier am Computer-Arbeitstisch
Spannungsversorgung für Mikrocontroller-Schaltungen DH1AAD, Ingo Gerlach, 20.11.2011, e-mail : Ingo.Gerlach@onlinehome.de Ziel Der Hintergrund für die Entwicklung diese Netzteiles war, das hier am Computer-Arbeitstisch
Benutzerhandbuch. PCI-Extender. Industrie PC-Meßtechnik Stand 01/99
 Benutzerhandbuch PCI-Extender Industrie PC-Meßtechnik Stand 01/99 Inhaltsverzeichnis FUNKTION DER KARTE...4 BLOCKSCHALTBILD...5 TECHNISCHE DATEN...5 DER EINBAU IN IHREN PC...6 KARTENÜBERSICHT...7 PINBELEGUNGEN
Benutzerhandbuch PCI-Extender Industrie PC-Meßtechnik Stand 01/99 Inhaltsverzeichnis FUNKTION DER KARTE...4 BLOCKSCHALTBILD...5 TECHNISCHE DATEN...5 DER EINBAU IN IHREN PC...6 KARTENÜBERSICHT...7 PINBELEGUNGEN
3. Hardware CPLD XC9536 von Xilinx. CPLD / FPGA Tutorial
 3. Hardware 3.1. CPLD XC9536 von Xilinx Programmierbare Logikbausteine sind in unzähligen Varianten verfügbar. Die Baugrößen reichen von 20 bis 1704 Pins. Der Preis beginnt bei wenigen Euro für einfache
3. Hardware 3.1. CPLD XC9536 von Xilinx Programmierbare Logikbausteine sind in unzähligen Varianten verfügbar. Die Baugrößen reichen von 20 bis 1704 Pins. Der Preis beginnt bei wenigen Euro für einfache
GdI2 - Systemnahe Programmierung in C Übungen Jürgen Kleinöder Universität Erlangen-Nürnberg Informatik 4, 2006 U4.fm
 U4 4. Übungsaufgabe U4 4. Übungsaufgabe Grundlegendes zur Übung mit dem AVR-µC Register I/O Ports Interrupts AVR-Umgebung U4.1 U4-1 Grundlegendes zur Übung mit dem AVR-mC U4-1 Grundlegendes zur Übung mit
U4 4. Übungsaufgabe U4 4. Übungsaufgabe Grundlegendes zur Übung mit dem AVR-µC Register I/O Ports Interrupts AVR-Umgebung U4.1 U4-1 Grundlegendes zur Übung mit dem AVR-mC U4-1 Grundlegendes zur Übung mit
Rechnerarchitektur, Einführung in die Laborübungen
 G. Kemnitz Institut für Informatik, TU Clausthal (RA-LabEinf.pdf) 20. Dezember 2017 1/18 Rechnerarchitektur, Einführung in die Laborübungen G. Kemnitz Institut für Informatik, TU Clausthal (RA-LabEinf.pdf)
G. Kemnitz Institut für Informatik, TU Clausthal (RA-LabEinf.pdf) 20. Dezember 2017 1/18 Rechnerarchitektur, Einführung in die Laborübungen G. Kemnitz Institut für Informatik, TU Clausthal (RA-LabEinf.pdf)
easyident Türöffner mit integriertem USB Interface
 easyident Türöffner mit integriertem USB Interface Art. Nr. FS-0007-SEM Wir freuen uns, das sie sich für unser Produkt easyident Türöffner, mit Transponder Technologie entschieden haben. Easyident Türöffner
easyident Türöffner mit integriertem USB Interface Art. Nr. FS-0007-SEM Wir freuen uns, das sie sich für unser Produkt easyident Türöffner, mit Transponder Technologie entschieden haben. Easyident Türöffner
LCD board EB
 LCD board EB005-00-3 Inhalt 1. Über dieses Dokument...2 2. Allgemeine Information...3 3. Board-Layout...6 4. Schaltungsbeschreibung...7 Anhang 1 Schaltplan Copyright Matrix Multimedia Limited 2005 seite
LCD board EB005-00-3 Inhalt 1. Über dieses Dokument...2 2. Allgemeine Information...3 3. Board-Layout...6 4. Schaltungsbeschreibung...7 Anhang 1 Schaltplan Copyright Matrix Multimedia Limited 2005 seite
RGB-Sequenzer RS232 RS485 MDX512 AD / IO Platine
 RGB-Sequenzer RS232 RS485 MDX512 AD / IO Platine HARDWARE Platine Osram LED controller 85 x 130 mm, Industriestandard, doppelseitig, Lötstop, Positionsdruck Halterung 4 Bohrlöcher 2,8 mm Durchmesser Ein-
RGB-Sequenzer RS232 RS485 MDX512 AD / IO Platine HARDWARE Platine Osram LED controller 85 x 130 mm, Industriestandard, doppelseitig, Lötstop, Positionsdruck Halterung 4 Bohrlöcher 2,8 mm Durchmesser Ein-
Das Projekt kann mit zwei verschiedenen Simulatoren am PC durchgespielt werden.
 13 Fallstudie Nachdem die einzelnen Komponenten zur Softwareerstellung Compiler, Linker, Library, Make, Quellcode-Tools, Editoren und Simulatoren besprochen wurden, soll nun eine Fallstudie folgen, in
13 Fallstudie Nachdem die einzelnen Komponenten zur Softwareerstellung Compiler, Linker, Library, Make, Quellcode-Tools, Editoren und Simulatoren besprochen wurden, soll nun eine Fallstudie folgen, in
POB-Technology Dokumentation. POB-Technology Produkte. Deutsche Übersetzung von roboter-teile.de Alle Rechte vorbehalten Seite 1 von 13
 POB-Technology Produkte Deutsche Übersetzung von roboter-teile.de Alle Rechte vorbehalten Seite 1 von 13 Inhaltsverzeichnis Inhaltsverzeichnis Inhaltsverzeichnis... 2 Einführung...4 POB-EYE... 5 POB-LCD128...
POB-Technology Produkte Deutsche Übersetzung von roboter-teile.de Alle Rechte vorbehalten Seite 1 von 13 Inhaltsverzeichnis Inhaltsverzeichnis Inhaltsverzeichnis... 2 Einführung...4 POB-EYE... 5 POB-LCD128...
Programmieren in C Teil 3: Mikrocontrollerprogrammierung
 Programmieren in C Teil 3: Mikrocontrollerprogrammierung 08/30/10 Fachbereich Physik Institut für Kernphysik Bastian Löher, Martin Konrad 1 Tag 1 Hello World 08/30/10 Fachbereich Physik Institut für Kernphysik
Programmieren in C Teil 3: Mikrocontrollerprogrammierung 08/30/10 Fachbereich Physik Institut für Kernphysik Bastian Löher, Martin Konrad 1 Tag 1 Hello World 08/30/10 Fachbereich Physik Institut für Kernphysik
Bert van Dam. PIC MikroController. 50 Projekte für Anfänger und Fortgeschrittene. Elektor-Verlag, Aachen
 Bert van Dam PIC MikroController 50 Projekte für Anfänger und Fortgeschrittene Elektor-Verlag, Aachen Inhaltsverzeichnis Vorwort 7 1. Was ist ein PIC? 8 2. Das brauchen Sie 10 2.1 Was notwendig ist 10
Bert van Dam PIC MikroController 50 Projekte für Anfänger und Fortgeschrittene Elektor-Verlag, Aachen Inhaltsverzeichnis Vorwort 7 1. Was ist ein PIC? 8 2. Das brauchen Sie 10 2.1 Was notwendig ist 10
Fachhochschule Kaiserslautern Fachbereich Angewandte Ingenieurwissenschaften WS2010/11. Zeitpunkt der Prüfung: 18.01.2011 Beginn: 10.
 Lehrprozessor: Coldfire MCF-5272 Zeitpunkt der Prüfung: 18.01.2011 Beginn: 10.45 Uhr Raum: Aula Bearbeitungszeit: 180 Minuten Erlaubte Hilfsmittel: Gedrucktes Vorlesungsskript von Prof. Neuschwander mit
Lehrprozessor: Coldfire MCF-5272 Zeitpunkt der Prüfung: 18.01.2011 Beginn: 10.45 Uhr Raum: Aula Bearbeitungszeit: 180 Minuten Erlaubte Hilfsmittel: Gedrucktes Vorlesungsskript von Prof. Neuschwander mit
R 2 Prototyping. HV 2 Monitor Version 1.2. gmbh. 5. September 2012 INHALT. Übersicht Anschlüsse / Taster Funktionen...
 gmbh Marcellinus Pfeiffer Dorfstrasse 62 CH 8126 Zumikon +41 78 870 2977 m.pfeiffer @ me.com HV 2 Monitor Version 1.2 5. September 2012 INHALT Übersicht... 2 Anschlüsse / Taster... 2 Funktionen... 3 Einstellen
gmbh Marcellinus Pfeiffer Dorfstrasse 62 CH 8126 Zumikon +41 78 870 2977 m.pfeiffer @ me.com HV 2 Monitor Version 1.2 5. September 2012 INHALT Übersicht... 2 Anschlüsse / Taster... 2 Funktionen... 3 Einstellen
Autonome Mobile Systeme. Dr. Stefan Enderle
 Autonome Mobile Systeme Dr. Stefan Enderle 2. Mikrocontroller Einleitung Unterschied Controller / Prozessor: Speicher (RAM, Flash, Eprom) intern Viele I/Os (Digital, Analog) Bus-Unterstützung (Seriell,
Autonome Mobile Systeme Dr. Stefan Enderle 2. Mikrocontroller Einleitung Unterschied Controller / Prozessor: Speicher (RAM, Flash, Eprom) intern Viele I/Os (Digital, Analog) Bus-Unterstützung (Seriell,
Rechnerarchitektur, Einführung in die Laborübungen
 Rechnerarchitektur, Einführung in die Laborübungen G. Kemnitz 24. November 2016 Inbetriebnahme der Mikrorechnerbaudruppe 1. Anschluss 5V-Netzteil 2. Anschluss Programmer 3. Einschalter 4. Eingabeschalter
Rechnerarchitektur, Einführung in die Laborübungen G. Kemnitz 24. November 2016 Inbetriebnahme der Mikrorechnerbaudruppe 1. Anschluss 5V-Netzteil 2. Anschluss Programmer 3. Einschalter 4. Eingabeschalter
Installation von der MPLAB IDE
 Die Quelle für deutschsprachigen PIC-Entwickler Installation von der MPLAB IDE Stuart Cording http://codinghead.googlepages.com http://de.youtube.com/codinghead Version 1.2 23. Juli 2008 Namensnennung-Weitergabe
Die Quelle für deutschsprachigen PIC-Entwickler Installation von der MPLAB IDE Stuart Cording http://codinghead.googlepages.com http://de.youtube.com/codinghead Version 1.2 23. Juli 2008 Namensnennung-Weitergabe
Microcontroller Praktikum SS2010 Dipl. Ing. R. Reisch
 Microcontroller Praktikum SS2010 Dipl. Ing. R. Reisch Die wichtigsten Unterlagen/Tools Für das Praktikum Unterlagen/Kenntnisse/Tools wichtig: Datenblatt des AT80USB1287 µc Schaltplan des im Praktikum verwendeten
Microcontroller Praktikum SS2010 Dipl. Ing. R. Reisch Die wichtigsten Unterlagen/Tools Für das Praktikum Unterlagen/Kenntnisse/Tools wichtig: Datenblatt des AT80USB1287 µc Schaltplan des im Praktikum verwendeten
Einführung in Mikrokontroller Benutzung mit dem Arduino Board. Ramon Hofer ICVR
 Einführung in Mikrokontroller Benutzung mit dem Arduino Board Ramon Hofer ICVR Ablauf Warum Mikrokontroller Das Arduino Board Anschliessen von Bauteilen Digitale Ein- und Ausgaben Analoge Eingaben Serielle
Einführung in Mikrokontroller Benutzung mit dem Arduino Board Ramon Hofer ICVR Ablauf Warum Mikrokontroller Das Arduino Board Anschliessen von Bauteilen Digitale Ein- und Ausgaben Analoge Eingaben Serielle
Teach-Dongle Rev 1.1. Teach-Dongle. Rev 1.1 Stand Okt
 Teach-Dongle - 1 - - 2 - 1. Allgemeines Inhaltsverzeichnis 1.1 Informationen zum Teach-Dongle Überblick Features 1.2 Rechtliches Urheberrechte Warenzeichen 1.3 EMV Anmerkungen zur EMV 2. Hardwarebeschreibung
Teach-Dongle - 1 - - 2 - 1. Allgemeines Inhaltsverzeichnis 1.1 Informationen zum Teach-Dongle Überblick Features 1.2 Rechtliches Urheberrechte Warenzeichen 1.3 EMV Anmerkungen zur EMV 2. Hardwarebeschreibung
1 Takt- u. Richtungssignal Generator StepDirGen
 1 Takt- u. Richtungssignal Generator StepDirGen Abbildung 1: 3D Ansicht des Generators Der Impulsgenerator dient zur einfachen direkten Ansteuerung von handelsüblichen Schrittmotorendstufen. Ein PC oder
1 Takt- u. Richtungssignal Generator StepDirGen Abbildung 1: 3D Ansicht des Generators Der Impulsgenerator dient zur einfachen direkten Ansteuerung von handelsüblichen Schrittmotorendstufen. Ein PC oder
F4 Fuse- und Lock-Bits
 Im AVR gibt es eine Reihe von programmierbaren Schaltern, die wichtige Eigenschaften des Controller festlegen. Diese Schalter können nur mit dem Programmiergerät verändert werden (Ausnahme: Bootloader
Im AVR gibt es eine Reihe von programmierbaren Schaltern, die wichtige Eigenschaften des Controller festlegen. Diese Schalter können nur mit dem Programmiergerät verändert werden (Ausnahme: Bootloader
Bedienungsanleitung. Name:Programmierbarer LED Controller Model:TC420
 Name:Programmierbarer LED Controller Model:TC420 Bedienungsanleitung Der LED Controller ist ein frei-programmierbarer Lichtsimulator mit 5 Ausgangskanälen (12-24V). Jeder Kanal kann individuell programmiert
Name:Programmierbarer LED Controller Model:TC420 Bedienungsanleitung Der LED Controller ist ein frei-programmierbarer Lichtsimulator mit 5 Ausgangskanälen (12-24V). Jeder Kanal kann individuell programmiert
,Das wären ja prächtige Kleider', dachte der Kaiser; wenn ich solche hätte,..ja, das Zeug muss sogleich für mich gewebt werden!'
 2.0 Ghost: Der AT89LPx052 Entwicklungshelfer,Das wären ja prächtige Kleider', dachte der Kaiser; wenn ich solche hätte,..ja, das Zeug muss sogleich für mich gewebt werden!' Was liegt nun näher als beide
2.0 Ghost: Der AT89LPx052 Entwicklungshelfer,Das wären ja prächtige Kleider', dachte der Kaiser; wenn ich solche hätte,..ja, das Zeug muss sogleich für mich gewebt werden!' Was liegt nun näher als beide
Montage der PowerPlatine
 Montage der PowerPlatine Inhaltsverzeichnis Inhaltsverzeichnis Seite 1 Montage der Powerplatine Seite 2 Masse Schaltkreise verbinden Seite 3 Anschlüsse der PowerPlatine Seite 4 Schließen wir die PowerPlatine
Montage der PowerPlatine Inhaltsverzeichnis Inhaltsverzeichnis Seite 1 Montage der Powerplatine Seite 2 Masse Schaltkreise verbinden Seite 3 Anschlüsse der PowerPlatine Seite 4 Schließen wir die PowerPlatine
0-10V Steuerung für Frequenzumrichter
 0-10V Steuerung für Frequenzumrichter Soft- und Hardware Langenfeld, Schmutterstr. 6, 86866 Mickhausen Tel.: 082041281 E-Mail: Langenfeld@pro-tos.de Homepage: http://www.pro-tos.de 1 Inhaltsverzeichnis
0-10V Steuerung für Frequenzumrichter Soft- und Hardware Langenfeld, Schmutterstr. 6, 86866 Mickhausen Tel.: 082041281 E-Mail: Langenfeld@pro-tos.de Homepage: http://www.pro-tos.de 1 Inhaltsverzeichnis
Microcontroller Kurs. 08.07.11 Microcontroller Kurs/Johannes Fuchs 1
 Microcontroller Kurs 08.07.11 Microcontroller Kurs/Johannes Fuchs 1 Was ist ein Microcontroller Wikipedia: A microcontroller (sometimes abbreviated µc, uc or MCU) is a small computer on a single integrated
Microcontroller Kurs 08.07.11 Microcontroller Kurs/Johannes Fuchs 1 Was ist ein Microcontroller Wikipedia: A microcontroller (sometimes abbreviated µc, uc or MCU) is a small computer on a single integrated
Stefan Schröder Hard- und Softwareentwicklungen. Steuerung für GPRS-Module und elektronische Sicherung. Zum Neetzekanal Brietlingen
 Stefan Schröder Hard- und Softwareentwicklungen Steuerung für GPRS-Module und elektronische Sicherung Stefan Schröder Hard- und Softwareentwicklungen Zum Neetzekanal 19 21382 Brietlingen e-mail: schroeder@sshus.de
Stefan Schröder Hard- und Softwareentwicklungen Steuerung für GPRS-Module und elektronische Sicherung Stefan Schröder Hard- und Softwareentwicklungen Zum Neetzekanal 19 21382 Brietlingen e-mail: schroeder@sshus.de
Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13. Teil 8: gavrasmw und weitere Beispiele
 Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13 Eine Einführung in Aufbau, Funktionsweise, Programmierung und Nutzen von Mikroprozessoren Teil 8: gavrasmw und weitere Beispiele gavrasmw
Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13 Eine Einführung in Aufbau, Funktionsweise, Programmierung und Nutzen von Mikroprozessoren Teil 8: gavrasmw und weitere Beispiele gavrasmw
Ausführliches Manual zum Microchip PIC-Programmer Version 7.33
 Ausführliches Manual zum Microchip PIC-Programmer Version 7.33 Dokumentenversion 2.0 Steven Wetzel, M.Sc. 10. Februar 2006 Inhaltsverzeichnis 1 Hardware 2 1.1 Der Programmer.....................................
Ausführliches Manual zum Microchip PIC-Programmer Version 7.33 Dokumentenversion 2.0 Steven Wetzel, M.Sc. 10. Februar 2006 Inhaltsverzeichnis 1 Hardware 2 1.1 Der Programmer.....................................
Motorsteuerung. Embedded Software Praktikum 4. Tim Hölzemann Embedded Engineering
 Motorsteuerung Embedded Software Praktikum 4 Tim Hölzemann Embedded Engineering Hüfferstraße 27 fon +49 (0)251.83 64-050 th403054@fh-muenster.de D-48149 Münster fax +49 (0)251.83 64-060 www.fh-muenster.de
Motorsteuerung Embedded Software Praktikum 4 Tim Hölzemann Embedded Engineering Hüfferstraße 27 fon +49 (0)251.83 64-050 th403054@fh-muenster.de D-48149 Münster fax +49 (0)251.83 64-060 www.fh-muenster.de
Umbau eines Saug- und Wisch Roboters auf ARDUINO Steuerung
 Saug-Wisch-Roboter Umbau eines Saug- und Wisch Roboters auf ARDUINO Steuerung TOPAN AVC 701 (702) Seite 1 Saug-Wisch-Roboter Elektronik M Saug Motor Radmotor Links FB 433 M Elektronik Arduino Nano DC-
Saug-Wisch-Roboter Umbau eines Saug- und Wisch Roboters auf ARDUINO Steuerung TOPAN AVC 701 (702) Seite 1 Saug-Wisch-Roboter Elektronik M Saug Motor Radmotor Links FB 433 M Elektronik Arduino Nano DC-
LEGO MINDSTORMS NXT MIT LABVIEW 2009 PROGRAMMIEREN
 LEGO MINDSTORMS NXT MIT LABVIEW 2009 PROGRAMMIEREN Prof. Dr.-Ing. Dahlkemper Fabian Schwartau Patrick Voigt 1 NXT DIRECT COMMANDS Es gibt zwei verschiedene Möglichkeiten, den NXT zu programmieren: Es werden
LEGO MINDSTORMS NXT MIT LABVIEW 2009 PROGRAMMIEREN Prof. Dr.-Ing. Dahlkemper Fabian Schwartau Patrick Voigt 1 NXT DIRECT COMMANDS Es gibt zwei verschiedene Möglichkeiten, den NXT zu programmieren: Es werden
Projektdokumentation
 Prozeßdatenverarbeitung Vertiefungsveranstaltung 2006 Thema: Aufzugssteuerung per PIC18F452 Projektteilnehmer: Maxim Albertin Oskar Horch Alexander Bitz Auftraggeber: Prof. Dr. Karl-Otto Linn Seite 1 von
Prozeßdatenverarbeitung Vertiefungsveranstaltung 2006 Thema: Aufzugssteuerung per PIC18F452 Projektteilnehmer: Maxim Albertin Oskar Horch Alexander Bitz Auftraggeber: Prof. Dr. Karl-Otto Linn Seite 1 von
Kurzanleitung: 1. Anschüsse. MWCLightRGB by VoBo & HaDi-RC
 Kurzanleitung: 1. Anschüsse Input: 3,8 bis 5 Volt!(nicht 5,5 V oder 6 V!) Output: Anschlüsse für WS2812 LED-Bänder (6/9 LED s / Arm) RC1: RC-Kanal -> Auswahl der Funktion/Lichtmuster RC2: RC-Kanal -> Auswahl
Kurzanleitung: 1. Anschüsse Input: 3,8 bis 5 Volt!(nicht 5,5 V oder 6 V!) Output: Anschlüsse für WS2812 LED-Bänder (6/9 LED s / Arm) RC1: RC-Kanal -> Auswahl der Funktion/Lichtmuster RC2: RC-Kanal -> Auswahl
Software ubiquitärer Systeme
 Software ubiquitärer Systeme Übung 2: Speicherarchitekturen in Mikrocontrollern und AOStuBS Christoph Borchert Arbeitsgruppe Eingebettete Systemsoftware Lehrstuhl für Informatik 12 TU Dortmund http://ess.cs.uni-dortmund.de/~chb/
Software ubiquitärer Systeme Übung 2: Speicherarchitekturen in Mikrocontrollern und AOStuBS Christoph Borchert Arbeitsgruppe Eingebettete Systemsoftware Lehrstuhl für Informatik 12 TU Dortmund http://ess.cs.uni-dortmund.de/~chb/
Aufgaben zur Attiny-Platine
 Das Attiny-Projekt Aufgaben 1 Aufgaben zur Attiny-Platine 1. LEDs blinken 1.1 Schließen Sie eine rote LED an PortB.0 und eine grüne LED an PortB.1 an (vgl. Abb. 1). Achten Sie dabei darauf, dass die langen
Das Attiny-Projekt Aufgaben 1 Aufgaben zur Attiny-Platine 1. LEDs blinken 1.1 Schließen Sie eine rote LED an PortB.0 und eine grüne LED an PortB.1 an (vgl. Abb. 1). Achten Sie dabei darauf, dass die langen
Anwendungen der Prozessdatenverarbeitung (Liste V) Leitung: Prof. Dr. Linn. Microcontroller Programmierung
 Leitung: Prof. Dr. Linn. Microcontroller Programmierung") Anwendungen der Prozessdatenverarbeitung (Liste V) Microcontroller Programmierung Dokumentation Christoph Schulz Patrik Simon Dirk Stein Sommersemester 2005 INHALTSVERZEICHNIS Einführung - 2 - Die Aufgabenstellung
Anwendungen der Prozessdatenverarbeitung (Liste V) Microcontroller Programmierung Dokumentation Christoph Schulz Patrik Simon Dirk Stein Sommersemester 2005 INHALTSVERZEICHNIS Einführung - 2 - Die Aufgabenstellung
D.1 Vorbereitung. Teil D Analog-Digital-Wandler 1
 D.1 Vorbereitung So wird der Analog-Digital-Wandler des Mikrocontrollers ATmega328P initialisiert: ADMUX = _BV(REFS0); ADCSRA = _BV(ADEN) _BV(ADPS2) _BV(ADPS1) _BV(ADPS0); Der Analog-Digital-Wandler ist
D.1 Vorbereitung So wird der Analog-Digital-Wandler des Mikrocontrollers ATmega328P initialisiert: ADMUX = _BV(REFS0); ADCSRA = _BV(ADEN) _BV(ADPS2) _BV(ADPS1) _BV(ADPS0); Der Analog-Digital-Wandler ist
Fuses mit BASCOM und USBASP setzen
 Auch wenn mir dieser Programmteil von BASCOM wenig gefällt und es hübschere Programme zum Setzen der AVR Fusebits gibt, sei's drum. Es gibt immer wieder OM's, die danach fragen. Zugute halten kann man,
Auch wenn mir dieser Programmteil von BASCOM wenig gefällt und es hübschere Programme zum Setzen der AVR Fusebits gibt, sei's drum. Es gibt immer wieder OM's, die danach fragen. Zugute halten kann man,
Produktinformationen. Basis Set Atmel Atmega8 & ISP Programmer. Lieferumfang :
 Produktinformationen Basis Set Atmel Atmega8 & ISP Programmer Lieferumfang : 1 Steckboard 840 Pin 1 USB ISP Programmer mit Kabel 1 Kabelsatz 32-teilig 1 Atmega8L 5 LED 3mm Klar Rot/Gelb/Grün/Blau/Weiss
Produktinformationen Basis Set Atmel Atmega8 & ISP Programmer Lieferumfang : 1 Steckboard 840 Pin 1 USB ISP Programmer mit Kabel 1 Kabelsatz 32-teilig 1 Atmega8L 5 LED 3mm Klar Rot/Gelb/Grün/Blau/Weiss
Erzeugen von PWM-Signalen mit dem Atmel AVR-Mikrocontroller
 Fachbereich Elektrotechnik und Informatik Labor für Angewandte Informatik und Datenbanken Praktikum Automatisierung/Echtzeitregelung (BAU/BER) Prof.Dr.-Ing. Coersmeier Erzeugen von PWM-Signalen mit dem
Fachbereich Elektrotechnik und Informatik Labor für Angewandte Informatik und Datenbanken Praktikum Automatisierung/Echtzeitregelung (BAU/BER) Prof.Dr.-Ing. Coersmeier Erzeugen von PWM-Signalen mit dem
Aufgabenstellung Praktikum Mikrorechentechnik Sommersemester 2014
 Aufgabenstellung Praktikum Mikrorechentechnik Sommersemester 2014 Aufgabe: Entwurf und Implementierung eines Weckers auf Basis des MSP430 Education Systems Beschreibung: Gegenstand des Praktikums ist der
Aufgabenstellung Praktikum Mikrorechentechnik Sommersemester 2014 Aufgabe: Entwurf und Implementierung eines Weckers auf Basis des MSP430 Education Systems Beschreibung: Gegenstand des Praktikums ist der
ATXMega128/192/256a3- Controllerboard
 RIBU ELEKTRONIK VERSAND Mühlenweg 6. 8160 Preding. Tel. 03172/64800. Fax 03172/64806 e-mail:office1@ribu.at. Internet: http://www.ribu.at ATXMega128/192/256a3- Controllerboard nur 46 x 36 mm groß mit Stiftleisten
RIBU ELEKTRONIK VERSAND Mühlenweg 6. 8160 Preding. Tel. 03172/64800. Fax 03172/64806 e-mail:office1@ribu.at. Internet: http://www.ribu.at ATXMega128/192/256a3- Controllerboard nur 46 x 36 mm groß mit Stiftleisten
Inhaltsverzeichnis 1 Ein-Bit-Rechner Mikrorechentechnik-Grundlagen Das Mikrocontrollersystem ein Überblick am Beispiel MSP430F1232
 Inhaltsverzeichnis 1 Ein-Bit-Rechner... 15 1.1 Rechenwerk... 15 1.1.1 Register und Takt... 16 1.1.2 Zwischenspeicher... 17 1.1.3 Native und emulierte Datenmanipulationsbefehle... 18 1.2 Steuerwerk... 20
Inhaltsverzeichnis 1 Ein-Bit-Rechner... 15 1.1 Rechenwerk... 15 1.1.1 Register und Takt... 16 1.1.2 Zwischenspeicher... 17 1.1.3 Native und emulierte Datenmanipulationsbefehle... 18 1.2 Steuerwerk... 20
Programmierung von Mikrocontrollern am Beispiel des ATMEL ATmega32
 Fakultät Elektrotechnik und Informationstechnik, Professur für Prozessleittechnik Prozessinformationsverarbeitung (PIV) Programmierung von Mikrocontrollern am Beispiel des ATMEL ATmega32 Professur für
Fakultät Elektrotechnik und Informationstechnik, Professur für Prozessleittechnik Prozessinformationsverarbeitung (PIV) Programmierung von Mikrocontrollern am Beispiel des ATMEL ATmega32 Professur für
1-Achsen- Schrittmotor- Handsteuerung SMT
 Vorwort 1-Achsen- Schrittmotor- Handsteuerung Herzlichen Glückwunsch zum Kauf der Schrittmotor- Handsteuerung SMT-1000. Sie haben damit ein robustes, langlebiges Gerät erworben, welches ausschließlich
Vorwort 1-Achsen- Schrittmotor- Handsteuerung Herzlichen Glückwunsch zum Kauf der Schrittmotor- Handsteuerung SMT-1000. Sie haben damit ein robustes, langlebiges Gerät erworben, welches ausschließlich
Johannes Kelper Universität Linz. Institut für Elektrische Messtechnik. Dokumentation. ATmeag8-USB Modul. Bernd R. Arminger ATmega8-USB Modul 1
 Dokumentation ATmeag8-USB Modul Bernd R. Arminger ATmega8-USB Modul 1 1. Beschreibung Das ATmega8-USB Modul besteht aus einen ATmega8 Mikrokontroller der Firma Atmel (Datenblatt/buch erhältlich unter http://www.atmel.com)
Dokumentation ATmeag8-USB Modul Bernd R. Arminger ATmega8-USB Modul 1 1. Beschreibung Das ATmega8-USB Modul besteht aus einen ATmega8 Mikrokontroller der Firma Atmel (Datenblatt/buch erhältlich unter http://www.atmel.com)
TINA. Teach-In Applikationssoftware. LinMot. Tel: +41 1 445 2282 Fax; +41 1 445 2281 Email: office@linmot.com Internet: www.linmot.
 TINA Teach-In Applikationssoftware Technoparkstrasse 1 CH-8005 Zürich Tel: +41 1 445 2282 Fax; +41 1 445 2281 Email: office@linmot.com Internet: www.linmot.com Inhaltsverzeichnis 1. Systembeschreibung...
TINA Teach-In Applikationssoftware Technoparkstrasse 1 CH-8005 Zürich Tel: +41 1 445 2282 Fax; +41 1 445 2281 Email: office@linmot.com Internet: www.linmot.com Inhaltsverzeichnis 1. Systembeschreibung...
Studiengang Maschinenbau, Schwerpunkt Mechatronik (früher: Automatisierungstechnik) Seite 1 von 8
 Seite 1 von 8") Studiengang Maschinenbau, Schwerpunkt Mechatronik (früher: Automatisierungstechnik) Seite 1 von 8 Hochschule München Fakultät 03 Zugelassene Hilfsmittel: alle eigenen, Taschenrechner Viel Erfolg!! Komponenten
Studiengang Maschinenbau, Schwerpunkt Mechatronik (früher: Automatisierungstechnik) Seite 1 von 8 Hochschule München Fakultät 03 Zugelassene Hilfsmittel: alle eigenen, Taschenrechner Viel Erfolg!! Komponenten