Was sind Sensoren? Sensoren sind (elektronische) Bauteile zur qualitativen oder quantitativen Messungbestimmter Größen und Eigenschaften.
|
|
|
- Bettina Hennie Bieber
- vor 7 Jahren
- Abrufe
Transkript
1 Sensoren
2 Was sind Sensoren? Sensoren sind (elektronische) Bauteile zur qualitativen oder quantitativen Messungbestimmter Größen und Eigenschaften.
3 Was messen Sensoren? Wärmestrahlung Temperatur Feuchtigkeit Druck (Flüssigkeit, Gas) Licht (Intensität u. Farbe) Entfernung Kraft Bewegung Beschleunigung Magnetismus Schall (hörbar, unhörbar) Helligkeit 3
4 Sinne Sensoren Sehsinn, Gehörsinn, Geruchssinn, Geschmackssinn, Berührungs-und Drucksinn, Temperatursinn, Schmerzsinn, Stellungssinn, Spannungs-/Kraftsinn, Lagesinn, Drehbewegungssinn Sinnesgebiete (nach Herder) 4
5 Wozu sind Sensoren? Sensoren ermöglichen (Computer-)Systemendie Wahrnehmung der Umweltund erlauben über die Verarbeitungdieser Informationen erst die (intelligente) Reaktionauf die wahrgenommenen Gegebenheitender Umwelt. 5
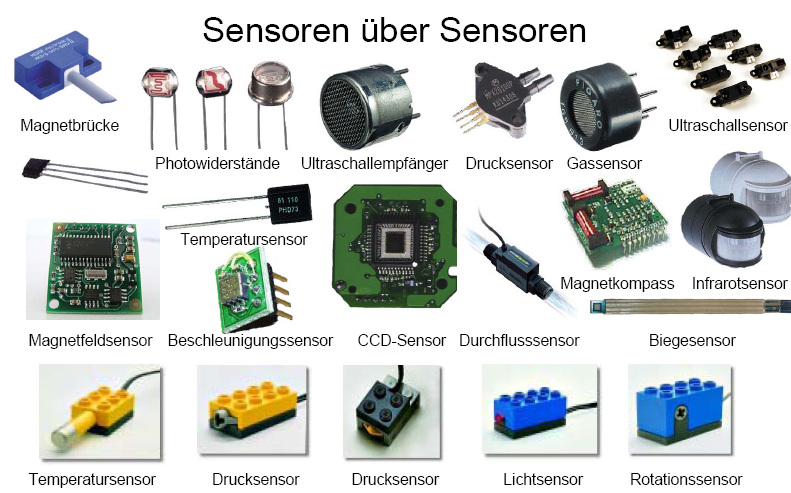
6 Arten von Sensoren Induktive Sensoren (z.b. Metalldetektor) Kapazitive Sensoren (z.b. Flüssigkeitsstandsmessung, Erkennung von Nicht-Metallen) Fotoelektrische Sensoren (z.b. Helligkeitsmessung mit Fotowiderständen ) Piezoelektrische Sensoren (z.b. Drucksensoren) Temperatursensoren (z.b. Heizungssteuerung) Magnetfeldsensoren (z.b. Schalter) Ultraschall-Sensoren (z.b. Entfernungsmessung) CCD-Sensoren (z.b. Digitalkameras) Laser-Messverfahren (z.b. Sick-Laserscanner, Bodyscanner) Chemische Sensoren (z.b. Säuregehaltmessung) 6
7 7
8 Anwendungsgebiete für Sensoren Robotik (Odometrie, Positionierung) Industrie-Anlagen (Fertigungsroboter, Logistik (Transport, automatische Lager), Ablaufsteuerung von Fertigungsprozessen) Sicherheitstechnik (Überwachungsanlagen, Glasbruchmelder, Kameras) Heim-Elektronik (Video-und Fotokameras, Automated Home) Autos 8

9 Sensoren im Alltag (BMW) Heute enthalten moderne Autos zwischen 50 und 150 Sensoren, die den Betriebszustand und das Fahrverhalten des Autos überwachen und bis zu einem gewissen Grade steuern. 9


10 Sensoren im Alltag (Heimbereich) 10
11 Arten von Sensoren Intern (Erfassung von Größen innerhalb des Systems) Extern (Erfassung von Größen aus der Umgebung des Systems) Aktiv (verändern ein bereits angelegtes, externes elektrisches Signal bei Änderung) Passiv (erzeugen selbständig ein elektrisches Signal bei Änderung) 11
12 Problemstellungen Nur partielle Modellierung der Umwelt durch Sensordaten möglich Auswahl und Güte der Sensoren Verwendung verschiedenartiger Sensoren Fusion der Sensordaten zu konsistentem Gesamtbild Modell der Umwelt zur Dateninterpretation ist immer nur eine Abstraktion Umgang mit Unsicherheit und Veränderung 12
13 Problemstellungen Reproduzierbarkeit von Sensordaten Messabweichung der Daten (systematische und statistische Fehler) Absolute/relative Messabweichung Es ist wichtig, die Sensoren, Umgebung und Verarbeitung der Daten aufeinander abzustimmen. 13
14 Sensoren in der Robotik Sensoren intern extern Odometrie Kontakt Tachometer Rad-Encoder Bumper Kraftsensor Lage/Orientierung Robertino: Andere Neigung Gyroskop Infrarotsensor Kamera Laserscanner Ultraschallsensor 14
15 Infrarotsensor Infrarotsensor arbeitet nach einem einfachen Sender-Empfänger Empfänger-Prinzip. Infrarotlicht von einer Lampe ausgesendet, wird von allen festen Gegenständen reflektiert und mittels eine Fotodiode empfangen. Durch die Zeitliche Verzögerung errechnet der Sensor die Entfernung zum reflektierenden Gegenstand. 15
16 Kamera Ein (Digital( Digital-)Lichtbild der Umgebung wird gemacht. Alles Andere ist von der Software abhängig: Objekt-,, Bewegungserkennung, etc 16
17 17
18 Fragen? 18
19 Benutzte Materialien Stefan Hesse: Industrieroboterpraxis Gabriele und Robert Schoblick: : LEGO MindStorms Basics der Robotertechnik Internet, das Nützlichste 19
Annährungssensoren. Induktive Sensoren. Kapazitive Sensoren. Ultraschall-Sensoren. Optische Anährungssensoren
 Annährungssensoren Zum Feststellen der Existenz eines Objektes innerhalb eines bestimmten Abstands. In der Robotik werden sie für die Nah-Gebiets-Arbeit, Objekt-Greifen oder Kollisionsvermeidung verwendet.
Annährungssensoren Zum Feststellen der Existenz eines Objektes innerhalb eines bestimmten Abstands. In der Robotik werden sie für die Nah-Gebiets-Arbeit, Objekt-Greifen oder Kollisionsvermeidung verwendet.
Ultraschallsensoren von Alexandra Bauer
 Ultraschallsensoren von Alexandra Bauer - 1 - Inhaltsverzeichnis 1. Funktionsweise von Ultraschallsensoren 1.1. Definition von Ultraschallsensoren S. 3 1.2. Probleme die mit beim Arbeiten mit S. 4 US Sensoren
Ultraschallsensoren von Alexandra Bauer - 1 - Inhaltsverzeichnis 1. Funktionsweise von Ultraschallsensoren 1.1. Definition von Ultraschallsensoren S. 3 1.2. Probleme die mit beim Arbeiten mit S. 4 US Sensoren
Grundlagen der Bauelemente. Inhalt. Quellen: Autor:
 Grundlagen der Bauelemente Inhalt 1. Der micro:bit... 2 2. Der Stromkreis... 4 3. Die Bauteile für die Eingabe / Input... 5 4. Die Bauteile für die Ausgabe / Output... 5 5. Der Widerstand... 6 6. Die Leuchtdiode
Grundlagen der Bauelemente Inhalt 1. Der micro:bit... 2 2. Der Stromkreis... 4 3. Die Bauteile für die Eingabe / Input... 5 4. Die Bauteile für die Ausgabe / Output... 5 5. Der Widerstand... 6 6. Die Leuchtdiode
Fakultät für Informatik, Institut für Robotik. Legorobotik Graphische Programmierung Vorstellung des EV3 Systems und der Programmierumgebung.
 Fakultät für Informatik, Institut für Robotik Legorobotik Graphische Programmierung Vorstellung des EV3 Systems und der Programmierumgebung Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System
Fakultät für Informatik, Institut für Robotik Legorobotik Graphische Programmierung Vorstellung des EV3 Systems und der Programmierumgebung Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System
Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik graphische Programmierung
 Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik graphische Programmierung Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS
Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik graphische Programmierung Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS
Mikrocomputerkompatibles kapazitives Sensorsystem
 Mikrocomputerkompatibles kapazitives Sensorsystem Steuern http://de.wikipedia.org/wiki/steuern- Systemtheorie Regeln http://de.wikipedia.org/w/index.php?title =Datei:R_S_Block.svg&filetimestamp=201 00120131518
Mikrocomputerkompatibles kapazitives Sensorsystem Steuern http://de.wikipedia.org/wiki/steuern- Systemtheorie Regeln http://de.wikipedia.org/w/index.php?title =Datei:R_S_Block.svg&filetimestamp=201 00120131518
Einführung in die Robotik Sensoren. Mohamed Oubbati Institut für Neuroinformatik. Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 30. 10.
 731 / 50 24153 mohamed.oubbati@uni-ulm.de 30. 10.") Einführung in die Robotik Sensoren Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 30. 10. 2012 Sensoren Was ist ein Sensor? Ein Sensor empfängt ein physikalisches
Einführung in die Robotik Sensoren Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 30. 10. 2012 Sensoren Was ist ein Sensor? Ein Sensor empfängt ein physikalisches
Einführung in die Robotik
 Einführung in die Robotik Vorlesung 2 21 Oktober 2008 Dr. Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de WS 2008/2009 Einführung Übersicht Mobile Robot
Einführung in die Robotik Vorlesung 2 21 Oktober 2008 Dr. Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de WS 2008/2009 Einführung Übersicht Mobile Robot
Sensoren (Der Regensensor) Paul Krickeberg, paulkri@mailbox.tu-berlin.de, www.projektlabor.tu-berlin.de
 Paul Krickeberg, paulkri@mailbox.tu-berlin.de, www.projektlabor.tu-berlin.de") Sensoren (Der Regensensor) 1 Gliederung: Was ist ein Sensor? Welche Arten von Sensoren gibt es? Der Regensensor 2 Was ist ein Sensor? sentire (lat) fühlen(de) Technisches Bauteil, dass physikalische oder
Sensoren (Der Regensensor) 1 Gliederung: Was ist ein Sensor? Welche Arten von Sensoren gibt es? Der Regensensor 2 Was ist ein Sensor? sentire (lat) fühlen(de) Technisches Bauteil, dass physikalische oder
Sensorkit X36. KY-001 Temperatur Sensor Modul. KY-002 Erschütterungs-Schalter Modul. KY-003 Hall Magnetfeld-Sensor Modul. KY-004 Taster-Modul
 KY-001 Temperatur Sensor Modul Chipsatz: DS18B20 Kommunikationsprotokoll: 1-Wire 9-12Bit genaue Temperaturmessung im Meßbereich von 55 C bis +125 C KY-002 Erschütterungs-Schalter Modul Bei Erschütterung
KY-001 Temperatur Sensor Modul Chipsatz: DS18B20 Kommunikationsprotokoll: 1-Wire 9-12Bit genaue Temperaturmessung im Meßbereich von 55 C bis +125 C KY-002 Erschütterungs-Schalter Modul Bei Erschütterung
Der Lego NXT Roboter. Hochschule Mannheim Fakultät für Informatik
 Der Lego NXT Roboter Hochschule Mannheim Fakultät für Informatik Der NXT-Stein Technische Daten 32-bit ARM7 Microcontroller 256 Kbytes FLASH, 64 Kbytes RAM 8-bit AVR microcontroller 4 Kbytes FLASH, 512
Der Lego NXT Roboter Hochschule Mannheim Fakultät für Informatik Der NXT-Stein Technische Daten 32-bit ARM7 Microcontroller 256 Kbytes FLASH, 64 Kbytes RAM 8-bit AVR microcontroller 4 Kbytes FLASH, 512
Ein Datenmodell zur Beschreibung der Fähigkeiten heterogener Robotersysteme
 GI Fachgruppe Betriebssysteme - Frühjahrstreffen 2015 Ein Datenmodell zur Beschreibung der Fähigkeiten heterogener Robotersysteme Christine Barth Masterstudentin an der Professur Betriebssysteme Einsatzgebiete
GI Fachgruppe Betriebssysteme - Frühjahrstreffen 2015 Ein Datenmodell zur Beschreibung der Fähigkeiten heterogener Robotersysteme Christine Barth Masterstudentin an der Professur Betriebssysteme Einsatzgebiete
Ultraschall. -Was ist Ultraschall genau?
 Ultraschall -Was ist Ultraschall genau? Ultraschall - Ultraschallwelllen sind für uns Menschen nicht hörbare Schallwellen. Sonographie -Wie funktioniert eine Sonographie? -Wozu braucht man eine Ultraschalluntersuchung?
Ultraschall -Was ist Ultraschall genau? Ultraschall - Ultraschallwelllen sind für uns Menschen nicht hörbare Schallwellen. Sonographie -Wie funktioniert eine Sonographie? -Wozu braucht man eine Ultraschalluntersuchung?
Sensorik. Thomas Röfer. Steuerung und Regelung Interne Sensorik Rotation, Belastung,... Externe Sensorik Taktil, Infrarot, Ultraschall,...
 Sensorik Thomas Röfer Steuerung und Regelung Interne Sensorik Rotation, Belastung,... Externe Sensorik Taktil, Infrarot, Ultraschall,... Kognitive Robotik I Rückblick Motorik Antriebs-/Lenkachse Differenzieller
Sensorik Thomas Röfer Steuerung und Regelung Interne Sensorik Rotation, Belastung,... Externe Sensorik Taktil, Infrarot, Ultraschall,... Kognitive Robotik I Rückblick Motorik Antriebs-/Lenkachse Differenzieller
Wie funktionieren Sensoren? -Fotowiderstand-
 Wie funktionieren Sensoren? -Fotowiderstand- Sinnesorgane und Sensoren erfüllen die gleichen Aufgaben Wir Menschen können mit Hilfe unserer Sinnesorgane Umwelteinflüsse (Reize) wahrnehmen. Unsere Augen
Wie funktionieren Sensoren? -Fotowiderstand- Sinnesorgane und Sensoren erfüllen die gleichen Aufgaben Wir Menschen können mit Hilfe unserer Sinnesorgane Umwelteinflüsse (Reize) wahrnehmen. Unsere Augen
Rückblick Motorik. Regelung Beispiel. Regelung. Intern - Tachometer. Interne Sensorik. Thomas Röfer
 Sensorik Rückblick Motorik Antriebs-/Lenkachse er Antrieb Thomas Röfer Steuerung und Regelung Interne Sensorik Rotation, Belastung,... Externe Sensorik Taktil,,,... Lenkmotor Stützräder Synchronantrieb
Sensorik Rückblick Motorik Antriebs-/Lenkachse er Antrieb Thomas Röfer Steuerung und Regelung Interne Sensorik Rotation, Belastung,... Externe Sensorik Taktil,,,... Lenkmotor Stützräder Synchronantrieb
3D-Sensoren auf PMD-Basis zur Objekterkennung und -verfolgung
 3D-Sensoren auf PMD-Basis zur Objekterkennung und -verfolgung Dipl.-Phys. Hartmut Eigenbrod 10 Jahre Fraunhofer-Allianz Vision Erlangen, 26. Oktober 2007 1 Gliederung Laufzeitkameras und ihre Vor- und
3D-Sensoren auf PMD-Basis zur Objekterkennung und -verfolgung Dipl.-Phys. Hartmut Eigenbrod 10 Jahre Fraunhofer-Allianz Vision Erlangen, 26. Oktober 2007 1 Gliederung Laufzeitkameras und ihre Vor- und
Wie sich Maschinen in unserer Welt zurechtfinden können
 Mittwoch, den 7. Mai 2014 Spielregeln: 1. Fragen aufschreiben und am Ende stellen 2. Beide Hände oben: Mucksmäuschenstille 3. Notizen machen 1 Sinnesorgane Verstehen: Die Sinnesorgane allein reichen nicht!
Mittwoch, den 7. Mai 2014 Spielregeln: 1. Fragen aufschreiben und am Ende stellen 2. Beide Hände oben: Mucksmäuschenstille 3. Notizen machen 1 Sinnesorgane Verstehen: Die Sinnesorgane allein reichen nicht!
Mechatronik betrifft uns alle - heute und in Zukunft
 Mechatronik betrifft uns alle - heute und in Zukunft Prof. Heinz Domeisen Institut für Mechatronik und Automatisierungstechnik www.ima.hsr.ch heinz.domeisen@hsr.ch 1 Mechanik Elektronik Der Begriff Mechatronik
Mechatronik betrifft uns alle - heute und in Zukunft Prof. Heinz Domeisen Institut für Mechatronik und Automatisierungstechnik www.ima.hsr.ch heinz.domeisen@hsr.ch 1 Mechanik Elektronik Der Begriff Mechatronik
Ein Stromnetz nach dem Internetprinzip: Digitalstrom, das Internet der Dinge im Bereich der elektrischen Verbraucher und Infrastrukturen
 Ein Stromnetz nach dem Internetprinzip: Digitalstrom, das Internet der Dinge im Bereich der elektrischen Verbraucher und Infrastrukturen Blockheizkraftwerke (BHKW) und virtuelle Kraftwerke Von der Eigenerzeugung
Ein Stromnetz nach dem Internetprinzip: Digitalstrom, das Internet der Dinge im Bereich der elektrischen Verbraucher und Infrastrukturen Blockheizkraftwerke (BHKW) und virtuelle Kraftwerke Von der Eigenerzeugung
Selbstschließende Hand (SsH)
") Selbstschließende Hand (SsH) Niklas Keischgens Aaron Philipzen Henri Kühn Jugend forscht 2017 Kurzfassung: Wir kamen auf die Idee eine selbst schließende Roboterhand zu planen und zu bauen. Der Gedanke
Selbstschließende Hand (SsH) Niklas Keischgens Aaron Philipzen Henri Kühn Jugend forscht 2017 Kurzfassung: Wir kamen auf die Idee eine selbst schließende Roboterhand zu planen und zu bauen. Der Gedanke
Inhaltsverzeichnis Sensoren Sinnesorgane der Technik Sensoren zur Positionserfassung
 Inhaltsverzeichnis 1 Sensoren Sinnesorgane der Technik... 1 1.1 Was sind Sensoren?... 1 1.2 Einteilung und Begriffe... 8 1.3 Aufgaben und nutzbare Effekte... 15 1.4 Einsatz und Auswahl... 19 Literatur...
Inhaltsverzeichnis 1 Sensoren Sinnesorgane der Technik... 1 1.1 Was sind Sensoren?... 1 1.2 Einteilung und Begriffe... 8 1.3 Aufgaben und nutzbare Effekte... 15 1.4 Einsatz und Auswahl... 19 Literatur...
EV3-TECHNIK. EV3-Sensoren
 Farbsensor Beim Farbsensor handelt es sich um einen digitalen Sensor, der die Farbe oder die Stärke des Lichts erkennen kann, das durch das kleine Fenster an der Vorderseite des Sensors eindringt. Dieser
Farbsensor Beim Farbsensor handelt es sich um einen digitalen Sensor, der die Farbe oder die Stärke des Lichts erkennen kann, das durch das kleine Fenster an der Vorderseite des Sensors eindringt. Dieser
Innovative by tradition. Sicherer Ultraschall in der Robotik Ultraschall schützt den Werker vor dem Schwert am Roboter
 Innovative by tradition. Sicherer Ultraschall in der Robotik Ultraschall schützt den Werker vor dem Schwert am Roboter Robotics Award 2017 2. Platz Funktional sicherer Ultraschall - USi safety Sicherer
Innovative by tradition. Sicherer Ultraschall in der Robotik Ultraschall schützt den Werker vor dem Schwert am Roboter Robotics Award 2017 2. Platz Funktional sicherer Ultraschall - USi safety Sicherer
SCHULUNGSANGEBOTE IM IOT-LABOR. Programm für Schulen, Berufsschulen und Unternehmen
 SCHULUNGSANGEBOTE IM IOT-LABOR Programm für Schulen, Berufsschulen und Unternehmen Was lernen Sie bei uns zum Thema IoT? Wenn Informationstechnik in Form von Sensoren und Mikroprozessoren im großen Stil
SCHULUNGSANGEBOTE IM IOT-LABOR Programm für Schulen, Berufsschulen und Unternehmen Was lernen Sie bei uns zum Thema IoT? Wenn Informationstechnik in Form von Sensoren und Mikroprozessoren im großen Stil
HSW Systemhaus Sicherheitstechnik
 HSW Systemhaus Sicherheitstechnik ein Produkt von Hanseatische Schutz- und Wachdienst GmbH DroneTracker 2.0 Sicherheit für Ihr Unternehmen und Ihren Luftraum Sichern Sie Ihren Luftraum! Wieso Dedrone?
HSW Systemhaus Sicherheitstechnik ein Produkt von Hanseatische Schutz- und Wachdienst GmbH DroneTracker 2.0 Sicherheit für Ihr Unternehmen und Ihren Luftraum Sichern Sie Ihren Luftraum! Wieso Dedrone?
Messtechnik. Rainer Parthier
 Rainer Parthier Messtechnik Grundlagen und Anwendungen der elektrischen Messtechnik für alle technischen Fachrichtungen und Wirtschaftsingenieure 6., überarbeitete und erweiterte Auflage Mit 136 Abbildungen
Rainer Parthier Messtechnik Grundlagen und Anwendungen der elektrischen Messtechnik für alle technischen Fachrichtungen und Wirtschaftsingenieure 6., überarbeitete und erweiterte Auflage Mit 136 Abbildungen
Inhaltsverzeichnis. Einleitung. LEGO MINDSTORMS - Von RCX zu EV3 Der intelligente EV3 22 Home- und Education-Edition 27
 Einleitung Teil I Grundlagen LEGO MINDSTORMS - Von RCX zu EV3 Der intelligente EV3 22 Home- und Education-Edition 27 2 Die Komponenten des EV3-Sets 29 Nutzen und Einsatzmöglichkeiten der elektronischen
Einleitung Teil I Grundlagen LEGO MINDSTORMS - Von RCX zu EV3 Der intelligente EV3 22 Home- und Education-Edition 27 2 Die Komponenten des EV3-Sets 29 Nutzen und Einsatzmöglichkeiten der elektronischen
Kapitel IV: Hardware. Inhalt
 Kapitel IV: Hardware Inhalt Kapitel IV: Hardware...17 1. Hardware allgemein...18 1.1. Sensorik......18 1.1.1. Einführung......18 1.1.2. analog vs. digital......19 1.1.3. aktiv vs. passiv......20 1.1.4.
Kapitel IV: Hardware Inhalt Kapitel IV: Hardware...17 1. Hardware allgemein...18 1.1. Sensorik......18 1.1.1. Einführung......18 1.1.2. analog vs. digital......19 1.1.3. aktiv vs. passiv......20 1.1.4.
Ernährung und Stofftransport
 Inhalt Lebewesen bestehen aus Zellen 1 Kennzeichen des Lebens 12 2 Organisationsebenen des Lebendigen 14 3 Geschichte der Zellenlehre 16 4 Das Lichtmikroskop 17 5 Untersuchungen mit dem Mikroskop 18 6
Inhalt Lebewesen bestehen aus Zellen 1 Kennzeichen des Lebens 12 2 Organisationsebenen des Lebendigen 14 3 Geschichte der Zellenlehre 16 4 Das Lichtmikroskop 17 5 Untersuchungen mit dem Mikroskop 18 6
RFID in der Speditionspraxis
 Foto: Vincent Sykosch, Schenker Deutschland AG RFID in der Speditionspraxis Schenker Deutschland AG Josof Rona Zentrale Systementwicklung Essen, 14.01.2010 Agenda RFID-Aktivitäten bei der Schenker Deutschland
Foto: Vincent Sykosch, Schenker Deutschland AG RFID in der Speditionspraxis Schenker Deutschland AG Josof Rona Zentrale Systementwicklung Essen, 14.01.2010 Agenda RFID-Aktivitäten bei der Schenker Deutschland
Schwerpunktplan Technik
 Schwerpunktplan Technik Oberschule Mitte, Wilhelmshaven Schwerpunktpläne im Fach Technik Jahrgang 7 Jahrgang 5 Inhalte Halbjahr 1 Halbjahr 2 6 Arbeiten und Produzieren I Technisches Zeichnen (3D-Druck)
Schwerpunktplan Technik Oberschule Mitte, Wilhelmshaven Schwerpunktpläne im Fach Technik Jahrgang 7 Jahrgang 5 Inhalte Halbjahr 1 Halbjahr 2 6 Arbeiten und Produzieren I Technisches Zeichnen (3D-Druck)
Mechanische Größen elektrisch gemessen
 Mechanische Größen elektrisch gemessen Grundlagen und Beispiele zur technischen Ausführung Dipl.-Ing. Michael Laible Prof. Dr.-Ing. Robert K. Müller Dipl.-Phys. Bernhard Bill Dipl.-Ing. Klaus Gehrke 5.,
Mechanische Größen elektrisch gemessen Grundlagen und Beispiele zur technischen Ausführung Dipl.-Ing. Michael Laible Prof. Dr.-Ing. Robert K. Müller Dipl.-Phys. Bernhard Bill Dipl.-Ing. Klaus Gehrke 5.,
Grundlagen moderner Bedienkonzepte
 Grundlagen moderner Bedienkonzepte Beispielbild Stefanie Hallmich Proseminar Technische Informatik Juli 2010 Gliederung Bedienelemente - Einführung Tochscreen Resistive Systeme Kapazitive Systeme Multitouch
Grundlagen moderner Bedienkonzepte Beispielbild Stefanie Hallmich Proseminar Technische Informatik Juli 2010 Gliederung Bedienelemente - Einführung Tochscreen Resistive Systeme Kapazitive Systeme Multitouch
LIDAR-Sensorik in Automobilapplikationen
 LIDAR-Sensorik in Automobilapplikationen Steffi Bartl 14th Leibniz Conference Of Advanced Science, Sensorsysteme 2012, Lichtenwalde, 18./19. Oktober Steffi Bartl First Sensor AG www.first-sensor.com 19.10.2012
LIDAR-Sensorik in Automobilapplikationen Steffi Bartl 14th Leibniz Conference Of Advanced Science, Sensorsysteme 2012, Lichtenwalde, 18./19. Oktober Steffi Bartl First Sensor AG www.first-sensor.com 19.10.2012
Eingabegeräte. für Virtuelle Präsenz. Mark Poguntke 1 / 24. Proseminar Virtuelle Präsenz SS 2005 Universität Ulm
 Eingabegeräte für Virtuelle Präsenz Mark Poguntke mp17@informatik.uni-ulm.de Proseminar Virtuelle Präsenz SS 2005 Universität Ulm 1 / 24 Themenübersicht 1. Interaktion in virtuellen Welten 2. Verschiedene
Eingabegeräte für Virtuelle Präsenz Mark Poguntke mp17@informatik.uni-ulm.de Proseminar Virtuelle Präsenz SS 2005 Universität Ulm 1 / 24 Themenübersicht 1. Interaktion in virtuellen Welten 2. Verschiedene
Ultimate Team. RoboCup Weltmeister Sponsorenmappe
 Ultimate Team RoboCup Weltmeister 2016 Sponsorenmappe ÜBER UNS Wir sind ein Team aus sechs Technik interessierten Schülern der 9. Klasse des Gymnasiums/Realschule Illertissen und unsere Leidenschaft ist
Ultimate Team RoboCup Weltmeister 2016 Sponsorenmappe ÜBER UNS Wir sind ein Team aus sechs Technik interessierten Schülern der 9. Klasse des Gymnasiums/Realschule Illertissen und unsere Leidenschaft ist
Menschliche Sinne. Informationsaufnahme: Visuell: ca. 75% Akustisch: ca. 13% Tastsinn: ca. 6% Geruch: ca. 4% Geschmack: ca. 2%
 Sensoren 1 Menschliche Sinne Informationsaufnahme: Visuell: ca. 75% Akustisch: ca. 13% Tastsinn: ca. 6% Geruch: ca. 4% Geschmack: ca. 2% 2 3 1. Grundlagen Sensor 1.1 Definition Sensor (sentire, dt. fühlen
Sensoren 1 Menschliche Sinne Informationsaufnahme: Visuell: ca. 75% Akustisch: ca. 13% Tastsinn: ca. 6% Geruch: ca. 4% Geschmack: ca. 2% 2 3 1. Grundlagen Sensor 1.1 Definition Sensor (sentire, dt. fühlen
Erfasstes Bild. Laser SW-CCD. Projektionslinse. Empfängerlinse
 Laser Projektionslinse SW-CCD Empfängerlinse Erfasstes Bild Distanzsensor Schalt-/ Messausgang Sensorkopf PC/SPS Werkstück Ein konventionelles Messsystem kann nur versuchen, das Beste aus dieser Situation
Laser Projektionslinse SW-CCD Empfängerlinse Erfasstes Bild Distanzsensor Schalt-/ Messausgang Sensorkopf PC/SPS Werkstück Ein konventionelles Messsystem kann nur versuchen, das Beste aus dieser Situation
kepler robotik unser Weg
 kepler robotik unser Weg Burgenländischer IT-Tag 2017 Robotik für alle Bundesrealgymnasium Keplerstraße Graz kepler robotik unser Weg Matura Wettbewerbe Kurse 1. 5. Klasse 3D Druck Platinenherstellung
kepler robotik unser Weg Burgenländischer IT-Tag 2017 Robotik für alle Bundesrealgymnasium Keplerstraße Graz kepler robotik unser Weg Matura Wettbewerbe Kurse 1. 5. Klasse 3D Druck Platinenherstellung
Sensoren für die Prozessund Fabrikautomation
 Stefan Hesse I Gerhard Schnell Sensoren für die Prozessund Fabrikautomation Funktion - Ausführung - Anwendung 4., aktualisierte und erweiterte Auflage Mit 482 Abbildungen PRAXIS...,.- J VIEWEG+ TEUBNER
Stefan Hesse I Gerhard Schnell Sensoren für die Prozessund Fabrikautomation Funktion - Ausführung - Anwendung 4., aktualisierte und erweiterte Auflage Mit 482 Abbildungen PRAXIS...,.- J VIEWEG+ TEUBNER
Gliederung. 1. Kurzfassung. 2. UV-Strahlung. 3. Unsere Idee. 4. Vorversuche
 Gliederung 1. Kurzfassung 2. UV-Strahlung 3. Unsere Idee 4. Vorversuche 4.1 Versuch zur Beleuchtungsstärke 4.2 Die Zeitschaltung 4.3 Die lichtgesteuerte Zeitschaltung 5. Entwurf von Prototypen 5.1 Prototyp
Gliederung 1. Kurzfassung 2. UV-Strahlung 3. Unsere Idee 4. Vorversuche 4.1 Versuch zur Beleuchtungsstärke 4.2 Die Zeitschaltung 4.3 Die lichtgesteuerte Zeitschaltung 5. Entwurf von Prototypen 5.1 Prototyp
«Logistik Das vernetzte Fahrzeug» Daniel Thommen LOSTnFOUND
 «Logistik 4.0 - Das vernetzte Fahrzeug» Daniel Thommen LOSTnFOUND «Unsere Welt verändert sich in Richtung Industrie 4.0..» Unsere Welt verändert sich.. «Die erste industrielle Revolution bestand in der
«Logistik 4.0 - Das vernetzte Fahrzeug» Daniel Thommen LOSTnFOUND «Unsere Welt verändert sich in Richtung Industrie 4.0..» Unsere Welt verändert sich.. «Die erste industrielle Revolution bestand in der
Einführung in die Robotik
 Einführung in die Robotik Vorlesung 4 13 November 2007 Dr. Mohamed Oubbati Institut für Neuroinformatik WS 2007/2008 Wiederholung vom letzten Mal! Wiederholung vom letzten Mal! Berührungssensor (an/aus)
Einführung in die Robotik Vorlesung 4 13 November 2007 Dr. Mohamed Oubbati Institut für Neuroinformatik WS 2007/2008 Wiederholung vom letzten Mal! Wiederholung vom letzten Mal! Berührungssensor (an/aus)
Sensoren zur Verkehrsdatenerfassung
 B Betrag, ohne Offset Messung 9 Sensoren zur Verkehrsdatenerfassung 6 5 4 3 2 0 550 500 450 Samples 400 350 300.5 2 2.5 3 Sensor 3.5 4 4.5 5 Prof. Dr. Richard Böker Vorstellung Prof. Dr.-Ing. Hochschule
B Betrag, ohne Offset Messung 9 Sensoren zur Verkehrsdatenerfassung 6 5 4 3 2 0 550 500 450 Samples 400 350 300.5 2 2.5 3 Sensor 3.5 4 4.5 5 Prof. Dr. Richard Böker Vorstellung Prof. Dr.-Ing. Hochschule
Quadrocopters and it s Applications: Overview of State of the Art Techniques
 : Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
: Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
mentor Grundwissen: Biologie bis zur 10. Klasse
 mentor Grundwissen mentor Grundwissen: Biologie bis zur 10. Klasse Alle wichtigen Themen von Franz X Stratil, Wolfgang Ruppert, Reiner Kleinert 1. Auflage mentor Grundwissen: Biologie bis zur 10. Klasse
mentor Grundwissen mentor Grundwissen: Biologie bis zur 10. Klasse Alle wichtigen Themen von Franz X Stratil, Wolfgang Ruppert, Reiner Kleinert 1. Auflage mentor Grundwissen: Biologie bis zur 10. Klasse
Deflektometrie Ein Messverfahren für spiegelnde Oberflächen
 Deflektometrie Ein Messverfahren für spiegelnde Oberflächen Dr. Alexander Zimmermann FORWISS Universität Passau Institut für Softwaresysteme in technischen Anwendungen der Informatik 19. Oktober 2017 Gliederung
Deflektometrie Ein Messverfahren für spiegelnde Oberflächen Dr. Alexander Zimmermann FORWISS Universität Passau Institut für Softwaresysteme in technischen Anwendungen der Informatik 19. Oktober 2017 Gliederung
Intelligente Transportsysteme
 Intelligente Transportsysteme Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz SS 2004 Michael Arnold Typen intelligenter Transportsysteme Fahrer-Assistenz-Systeme Mensch hat Kontrolle
Intelligente Transportsysteme Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz SS 2004 Michael Arnold Typen intelligenter Transportsysteme Fahrer-Assistenz-Systeme Mensch hat Kontrolle
Erste Schritte zum Start findest du hier: https://education.lego.com/de-de/weiterfuehrendeschulen/entdecken/informatik
 Robotik mit https://education.lego.com/de-de/downloads/mindstorms-ev3 Erste Schritte zum Start findest du hier: https://education.lego.com/de-de/weiterfuehrendeschulen/entdecken/informatik Baue zuerst
Robotik mit https://education.lego.com/de-de/downloads/mindstorms-ev3 Erste Schritte zum Start findest du hier: https://education.lego.com/de-de/weiterfuehrendeschulen/entdecken/informatik Baue zuerst
Fotoapparat. Was sind Fotoapparate? Grundbauteile. Arten. Analoger Fotoapparat. Digitalkamera
 Referent: Stephan Tesch 14. Januar 2009 Folie: 1/18 Gliederung 1. Was ist ein Fotoapparat? 2. 3. 4. Kriterien zum Unterscheiden 5. 6. it Referent: Stephan Tesch 14. Januar 2009 Folie: 2/18 t Optisches
Referent: Stephan Tesch 14. Januar 2009 Folie: 1/18 Gliederung 1. Was ist ein Fotoapparat? 2. 3. 4. Kriterien zum Unterscheiden 5. 6. it Referent: Stephan Tesch 14. Januar 2009 Folie: 2/18 t Optisches
Realität und Simulation
 Realität und Thomas Röfer Überblick Beispielsimulationen Universell, Roboterarme, Mobile Roboter, Virtuelle Realität Kognitive Robotik I Rückblick Sensorik Interne Sensoren Taktile Sensoren Kamera GPS
Realität und Thomas Röfer Überblick Beispielsimulationen Universell, Roboterarme, Mobile Roboter, Virtuelle Realität Kognitive Robotik I Rückblick Sensorik Interne Sensoren Taktile Sensoren Kamera GPS
Arduino Grundkurs. 3. Schreibe eine Funktion für das Morsezeichen S und eine für O
 Grundkurs LEDs Piezolautsprecher 1. Mikrocontroller Hello World Bring eine LED zum Blinken 1s ein / 1s aus usw. 2. Lichtmorsen - SOS Erzeuge Morsezeichen mit deiner LED SOS = - - - Punkt = 0.2s Strich
Grundkurs LEDs Piezolautsprecher 1. Mikrocontroller Hello World Bring eine LED zum Blinken 1s ein / 1s aus usw. 2. Lichtmorsen - SOS Erzeuge Morsezeichen mit deiner LED SOS = - - - Punkt = 0.2s Strich
Prinzipen und Komponenten Eingebetteter Systeme (PKES) Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme
 Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme") 1 Vorlesung Prinzipen und Komponenten Eingebetteter Systeme (PKES) (2) Was ist ein eingebettetes Gerät? Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme 2 Veranstaltungslandkarte Fehlertoleranz,
1 Vorlesung Prinzipen und Komponenten Eingebetteter Systeme (PKES) (2) Was ist ein eingebettetes Gerät? Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme 2 Veranstaltungslandkarte Fehlertoleranz,
Geschwindigkeitsmessung mit Lasern
 Geschwindigkeitsmessung mit Lasern Andreas Buschermöhle Universität Osnabrück 3. Juli 2007 1 2 3 4 berührungslose Messung berührungslose Messung sehr präzise Messung berührungslose Messung sehr präzise
Geschwindigkeitsmessung mit Lasern Andreas Buschermöhle Universität Osnabrück 3. Juli 2007 1 2 3 4 berührungslose Messung berührungslose Messung sehr präzise Messung berührungslose Messung sehr präzise
Emitec Group Gegründet 1993
 1 Emitec Group Gegründet 1993 3 Standort -Rotkreuz ZG Mitarbeiter 25 Sales Agent in Lausanne Mitglied Normenkreis TK 77 & 106 (EMV & Elektrosmog) Emitec und FLIR 4 Seit über 10 Jahren ein Paar! 2 Schulung
1 Emitec Group Gegründet 1993 3 Standort -Rotkreuz ZG Mitarbeiter 25 Sales Agent in Lausanne Mitglied Normenkreis TK 77 & 106 (EMV & Elektrosmog) Emitec und FLIR 4 Seit über 10 Jahren ein Paar! 2 Schulung
CMC III Sensoren DK Stand :
 CMC III Sensoren DK 7030.110 Stand : 24.01.2017 CMC III Sensoren DK 7030.110 erstellt am: 24.01.2017 auf www.rittal.com/de-de Produktbeschreibung Beschreibung: Die CMC III Sensoren überwachen die physikalischen
CMC III Sensoren DK 7030.110 Stand : 24.01.2017 CMC III Sensoren DK 7030.110 erstellt am: 24.01.2017 auf www.rittal.com/de-de Produktbeschreibung Beschreibung: Die CMC III Sensoren überwachen die physikalischen
[ Experiment- und Datenprotokollierung. mit der EV3 Software]
![[ Experiment- und Datenprotokollierung. mit der EV3 Software]](/thumbs/39/18075793.jpg "[ Experiment- und Datenprotokollierung. mit der EV3 Software]") 2013 [ Experiment- und Datenprotokollierung mit der EV3 Software] Experiment Datenprotokollierung Es gibt zwei Möglichkeiten um die Datenaufzeichnung durchzuführen. Eine besteht darin, die Datenprotokollierung
2013 [ Experiment- und Datenprotokollierung mit der EV3 Software] Experiment Datenprotokollierung Es gibt zwei Möglichkeiten um die Datenaufzeichnung durchzuführen. Eine besteht darin, die Datenprotokollierung
UNTERNEHMENSPRÄSENTATION
 UNTERNEHMENSPRÄSENTATION SICK AUF EINEN BLICK SICK weltweit einer der führenden Hersteller von Sensoren und Sensorlösungen für industrielle Anwendungen 2 VERLÄSSLICHER PARTNER FÜR SENSORLÖSUNGEN AUF DIE
UNTERNEHMENSPRÄSENTATION SICK AUF EINEN BLICK SICK weltweit einer der führenden Hersteller von Sensoren und Sensorlösungen für industrielle Anwendungen 2 VERLÄSSLICHER PARTNER FÜR SENSORLÖSUNGEN AUF DIE
ibeo LUX Laserscanner
 Jan Christoph Gries, Jan Girlich, Prof. Dr. Jianwei Zhang, Denis Klimentjew Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 19. März 2008 Jan Gries,
Jan Christoph Gries, Jan Girlich, Prof. Dr. Jianwei Zhang, Denis Klimentjew Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 19. März 2008 Jan Gries,
3 Grundlagen der Sensortechnik
 32 3 Grundlagen der Sensortechnik 3.1 Was ist ein Sensor? Als Sensoren (Lateinisch sensus = Gefühl) oder Messfühler werden in der Technik allgemein Bauteile bezeichnet, die bestimmte physikalische oder
32 3 Grundlagen der Sensortechnik 3.1 Was ist ein Sensor? Als Sensoren (Lateinisch sensus = Gefühl) oder Messfühler werden in der Technik allgemein Bauteile bezeichnet, die bestimmte physikalische oder
KAPITEL I KLASSIFIZIERUNG DER SENSOREN
 KAPITEL I KLASSIFIZIERUNG DER SENSOREN 1.1. Sensoren Der Fortschritt in der Informationsbearbeitungstechnik und die schnelle Entwicklung im Bereich der Mikroprozessoren und Computertechnologien haben auch
KAPITEL I KLASSIFIZIERUNG DER SENSOREN 1.1. Sensoren Der Fortschritt in der Informationsbearbeitungstechnik und die schnelle Entwicklung im Bereich der Mikroprozessoren und Computertechnologien haben auch
Touchscreens.... und ihre bildschirmlosen Freunde.
 Touchscreens... und ihre bildschirmlosen Freunde. 1 Öffentlich Automaten Benutzerfreundlichkeit Robust Barrierefreiheit 2 Industrie Einfach zu Bedienen Robust 3 Messen / Werbezwecke Erregen Aufmerksamkeit
Touchscreens... und ihre bildschirmlosen Freunde. 1 Öffentlich Automaten Benutzerfreundlichkeit Robust Barrierefreiheit 2 Industrie Einfach zu Bedienen Robust 3 Messen / Werbezwecke Erregen Aufmerksamkeit
Daniel Braun. Roboter programmieren. mit NXT-G für LEGO MINDSTORMS NXT
 Daniel Braun Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT Kapitel 2 LEGO MINDSTORMS LEGO kennen viele aus ihrer Kindheit oder von den eigenen Kindern, LEGO, das sind bunte Spielzeugklötze, mit
Daniel Braun Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT Kapitel 2 LEGO MINDSTORMS LEGO kennen viele aus ihrer Kindheit oder von den eigenen Kindern, LEGO, das sind bunte Spielzeugklötze, mit
Ambient Intelligence WS 2016/2017
 Ambient Intelligence WS 2016/2017 Vorlesung 2 Sensoren, Aktoren, Standards Florian Kirchbuchner FB Informatik GRIS WS 2016 / 2017 1 Information zur Übung Eine Teilnahme an der Übung ist NICHT verpflichtend
Ambient Intelligence WS 2016/2017 Vorlesung 2 Sensoren, Aktoren, Standards Florian Kirchbuchner FB Informatik GRIS WS 2016 / 2017 1 Information zur Übung Eine Teilnahme an der Übung ist NICHT verpflichtend
Ein Blick in den Garten meiner Nachbarn
 Ein Blick in den Garten meiner Nachbarn Aufgabe A: Beschreibe, was du auf dem Bild siehst. Wozu sind die verschiedenen Teile da? Aufgabe B: Beantworte folgende Fragen: 1. Welche Arbeit führt der Roboter
Ein Blick in den Garten meiner Nachbarn Aufgabe A: Beschreibe, was du auf dem Bild siehst. Wozu sind die verschiedenen Teile da? Aufgabe B: Beantworte folgende Fragen: 1. Welche Arbeit führt der Roboter
Inspektion von spiegelnden Oberflächen. Roland Herrmann Micro-Epsilon Messtechnik GmbH & Co. KG, Ortenburg
 Inspektion von spiegelnden Oberflächen Roland Herrmann Micro-Epsilon Messtechnik GmbH & Co. KG, Ortenburg Unternehmensprofil Seit 1968 Kompetenz in präziser Messtechnik Umfassende Produktpalette, entwickelt
Inspektion von spiegelnden Oberflächen Roland Herrmann Micro-Epsilon Messtechnik GmbH & Co. KG, Ortenburg Unternehmensprofil Seit 1968 Kompetenz in präziser Messtechnik Umfassende Produktpalette, entwickelt
Objekterkennung durch Vergleich von Farben. Videoanalyse Dr. Stephan Kopf HWS2007 Kapitel 5: Objekterkennung
 Objekterkennung durch Vergleich von Farben 48 Farbräume (I) Definitionen: Farbe: Sinnesempfindung (keine physikalische Eigenschaft), falls Licht einer bestimmten Wellenlänge auf die Netzhaut des Auges
Objekterkennung durch Vergleich von Farben 48 Farbräume (I) Definitionen: Farbe: Sinnesempfindung (keine physikalische Eigenschaft), falls Licht einer bestimmten Wellenlänge auf die Netzhaut des Auges
Table of Contents. Lucas Nülle GmbH Seite 1/7 https://www.lucas-nuelle.de
 Table of Contents Table of Contents EIT 8 Installationstechnik mit KNX EIT 8.2 Spezialanwendungen: Überwachung, Heizung, Wetter, Visualisierung, Linien - und Bereichskopplung mit KNX 1 2 2 4 4 Lucas Nülle
Table of Contents Table of Contents EIT 8 Installationstechnik mit KNX EIT 8.2 Spezialanwendungen: Überwachung, Heizung, Wetter, Visualisierung, Linien - und Bereichskopplung mit KNX 1 2 2 4 4 Lucas Nülle
SICK-UNTERNEHMENSPRÄSENTATION
 SICK-UNTERNEHMENSPRÄSENTATION SICK AUF EINEN BLICK SICK weltweit einer der führenden Hersteller von Sensoren und Sensorlösungen für industrielle Anwendungen 70 7.417 88 1.267 40.000 3.000 Jahre Erfahrung.
SICK-UNTERNEHMENSPRÄSENTATION SICK AUF EINEN BLICK SICK weltweit einer der führenden Hersteller von Sensoren und Sensorlösungen für industrielle Anwendungen 70 7.417 88 1.267 40.000 3.000 Jahre Erfahrung.
Rückblick Motorik. Regelung Beispiel. Regelung. Interne Sensorik. Regelung PID-Regler. Thomas Röfer
 Sensorik Rückblick Motorik Antriebs-/Lenkachse Differenzieller Antrieb Thomas Röfer Steuerung und Regelung Interne Sensorik Rotation, Belastung,... Externe Sensorik Taktil,,,... Lenkmotor Stützräder Synchronantrieb
Sensorik Rückblick Motorik Antriebs-/Lenkachse Differenzieller Antrieb Thomas Röfer Steuerung und Regelung Interne Sensorik Rotation, Belastung,... Externe Sensorik Taktil,,,... Lenkmotor Stützräder Synchronantrieb
Vorlesung: Angewandte Sensorik
 zhang@informatik.uni-hamburg.de Universität Hamburg AB Technische Aspekte Multimodaler Systeme zhang@informatik.uni-hamburg.de Inhaltsverzeichnis 1. Allgemeine Informationen..................... 3 2. Sensorgrundlagen..........................
zhang@informatik.uni-hamburg.de Universität Hamburg AB Technische Aspekte Multimodaler Systeme zhang@informatik.uni-hamburg.de Inhaltsverzeichnis 1. Allgemeine Informationen..................... 3 2. Sensorgrundlagen..........................
Sensoren für die Prozess- und Fabri kautomation
 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Stefan Hesse Gerhard Schnell Sensoren für die Prozess- und Fabri
2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Stefan Hesse Gerhard Schnell Sensoren für die Prozess- und Fabri
SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE. www.scan-go.eu www.shop.laserscanning-europe.com V.02.2014
 SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE V.02.2014 www.scan-go.eu www.shop.laserscanning-europe.com SCAN&GO SYSTEM (PATENTRECHTLICH GESCHÜTZT) DIE NEUE VERMESSUNGSTECHNOLOGIE Scan&Go ist eine neue Methode
SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE V.02.2014 www.scan-go.eu www.shop.laserscanning-europe.com SCAN&GO SYSTEM (PATENTRECHTLICH GESCHÜTZT) DIE NEUE VERMESSUNGSTECHNOLOGIE Scan&Go ist eine neue Methode
LabVIEW Erfahrungen aus der
 Fraunhofer VolksBot mit CompactRIO und LabVIEW Erfahrungen aus der Lehrveranstaltungsreihe Teamrobotik Ansgar Bredenfeld, Fraunhofer IAIS Manuela Kanneberg, Timo Lindhorst, Edgar Nett, Otto-von-Guericke-Universität
Fraunhofer VolksBot mit CompactRIO und LabVIEW Erfahrungen aus der Lehrveranstaltungsreihe Teamrobotik Ansgar Bredenfeld, Fraunhofer IAIS Manuela Kanneberg, Timo Lindhorst, Edgar Nett, Otto-von-Guericke-Universität
2 Aufbau und Teilsysteme eines autonomen mobilen Roboters
 2 Aufbau und Teilsysteme eines autonomen mobilen Roboters Teilsysteme Mechanik Kinematik Antrieb Sensoren Steuerung Programmierung 2.1 Mechanik Mechanik 3 Teilsysteme Fahrzeug Roboterarm Effektor, Hand
2 Aufbau und Teilsysteme eines autonomen mobilen Roboters Teilsysteme Mechanik Kinematik Antrieb Sensoren Steuerung Programmierung 2.1 Mechanik Mechanik 3 Teilsysteme Fahrzeug Roboterarm Effektor, Hand
Unterrichtsmaterialien in digitaler und in gedruckter Form. Auszug aus: Steuern und Regeln. Das komplette Material finden Sie hier: School-Scout.
 Unterrichtsmaterialien in digitaler und in gedruckter Form Auszug aus: Steuern und Regeln Das komplette Material finden Sie hier: School-Scout.de 27. Steuern und Regeln 1 von 14 Steuern und Regeln Grundlagen
Unterrichtsmaterialien in digitaler und in gedruckter Form Auszug aus: Steuern und Regeln Das komplette Material finden Sie hier: School-Scout.de 27. Steuern und Regeln 1 von 14 Steuern und Regeln Grundlagen
Steuerung von Materialfluß- und Logistiksystemen
 Reinhardt Jünemann Andreas Beyer Steuerung von Materialfluß- und Logistiksystemen Informations- und Steuern ngssysteme, Automatisierungstechnik Mit 156 Abbildungen und 30 Tabellen Springer Inhaltsverzeichnis
Reinhardt Jünemann Andreas Beyer Steuerung von Materialfluß- und Logistiksystemen Informations- und Steuern ngssysteme, Automatisierungstechnik Mit 156 Abbildungen und 30 Tabellen Springer Inhaltsverzeichnis
E-10, E-20 und Polfilter
 1. Aufgabenstellung E-10, E-20 und Polfilter Klaus Schräder Januar 2002 Polfilter und UV-Sperrfilter zählen zu den meist benutzten Filtern in der Fotografie. Dabei wird häufig geraten, bei Digitalkameras
1. Aufgabenstellung E-10, E-20 und Polfilter Klaus Schräder Januar 2002 Polfilter und UV-Sperrfilter zählen zu den meist benutzten Filtern in der Fotografie. Dabei wird häufig geraten, bei Digitalkameras
Übung zu Einführung in die Informatik # 14
 Übung zu Einführung in die Informatik # 14 Tobias Schill tschill@techfak.uni-bielefeld.de 12. Februar 2016 Aktualisiert am 12. Februar 2016 um 11:13 Erstklausur: Mi, 24.02.2016 von 10-12Uhr Antworten von
Übung zu Einführung in die Informatik # 14 Tobias Schill tschill@techfak.uni-bielefeld.de 12. Februar 2016 Aktualisiert am 12. Februar 2016 um 11:13 Erstklausur: Mi, 24.02.2016 von 10-12Uhr Antworten von
Physikalische Widersprüche
 Physikalische Widersprüche Einordnung: TRIZ/Analogie Dauer: 4 h Anwendungsbereich: - Wenn das Problem darin besteht, dass Parameter entgegengesetzte Zustände einnehmen müssen Teilnehmer: 2-4 Kurzbeschreibung:
Physikalische Widersprüche Einordnung: TRIZ/Analogie Dauer: 4 h Anwendungsbereich: - Wenn das Problem darin besteht, dass Parameter entgegengesetzte Zustände einnehmen müssen Teilnehmer: 2-4 Kurzbeschreibung:
Table of Contents. Table of Contents UniTrain UniTrain-Kurse UniTrain Kurse Messtechnik. Lucas Nülle GmbH Seite 1/7 https://www.lucas-nuelle.
 Table of Contents Table of Contents UniTrain UniTrain-Kurse UniTrain Kurse Messtechnik 1 2 2 3 Lucas Nülle GmbH Seite 1/7 https://www.lucas-nuelle.de UniTrain UniTrain - das multimediale E-learning System
Table of Contents Table of Contents UniTrain UniTrain-Kurse UniTrain Kurse Messtechnik 1 2 2 3 Lucas Nülle GmbH Seite 1/7 https://www.lucas-nuelle.de UniTrain UniTrain - das multimediale E-learning System
Ein autonomer mobiler Roboter mit elektronischer Nase
 Ein autonomer mobiler Roboter mit elektronischer Nase Achim Lilienthal Universität Tübingen WSI für Informatik, Lehrstuhl Rechnerarchitektur http://www-ra.informatik.uni-tuebingen.de Inhalt 1. Denkbare
Ein autonomer mobiler Roboter mit elektronischer Nase Achim Lilienthal Universität Tübingen WSI für Informatik, Lehrstuhl Rechnerarchitektur http://www-ra.informatik.uni-tuebingen.de Inhalt 1. Denkbare
Seminarvortrag. Themen: Grundlagen der Sensorik & Projekt Kaffeeautomatensteuerung. Autor: Thorsten Knoll Matrikelnummer
 Seminarvortrag Themen: Grundlagen der Sensorik & Projekt Kaffeeautomatensteuerung Autor: Thorsten Knoll Matrikelnummer 179652 Fach: Embedded Systems Hochschule Rhein-Main Sommersemester 2014 Seite 1 von
Seminarvortrag Themen: Grundlagen der Sensorik & Projekt Kaffeeautomatensteuerung Autor: Thorsten Knoll Matrikelnummer 179652 Fach: Embedded Systems Hochschule Rhein-Main Sommersemester 2014 Seite 1 von
2.4 GHz Übertragungssysteme - technische Grundlagen. Optimale Antennenverlegung und Ausrichtung
 2.4 GHz Übertragungssysteme - technische Grundlagen Optimale Antennenverlegung und Ausrichtung Warum 2.4 GHz verwenden? Bei den bisherigen nutzbaren Frequenzen (27 / 35 / 40 MHz...) gibt es zahlreiche
2.4 GHz Übertragungssysteme - technische Grundlagen Optimale Antennenverlegung und Ausrichtung Warum 2.4 GHz verwenden? Bei den bisherigen nutzbaren Frequenzen (27 / 35 / 40 MHz...) gibt es zahlreiche
Industrie 4.0 Was ist das? Eine kleine Betrachtung
 Eine kleine Betrachtung Eine kleine Betrachtung Die industrielle Revolutionen: Eine kleine Betrachtung Die industrielle Revolutionen: 1. Revolution: Erfindung der Dampfmaschine von James Watt Eine kleine
Eine kleine Betrachtung Eine kleine Betrachtung Die industrielle Revolutionen: Eine kleine Betrachtung Die industrielle Revolutionen: 1. Revolution: Erfindung der Dampfmaschine von James Watt Eine kleine
1 Grundlagen des elektrischen Messens mechanischer Größen
 1 Grundlagen des elektrischen Messens mechanischer Größen M. Laible 1.1 Einführung 1.1.1 Grundsätzliches über das Messen Messen ist das Erfassen und Darstellen einer physikalischen Größe. Dabei wird die
1 Grundlagen des elektrischen Messens mechanischer Größen M. Laible 1.1 Einführung 1.1.1 Grundsätzliches über das Messen Messen ist das Erfassen und Darstellen einer physikalischen Größe. Dabei wird die
1 Grundlagen des elektrischen Messens mechanischer Größen... 1
 Vorwort 1 Grundlagen des elektrischen Messens mechanischer Größen........................... 1 1.1 Einführung.......................................... 1 1.1.1 Grundsätzliches über das Messen.......................
Vorwort 1 Grundlagen des elektrischen Messens mechanischer Größen........................... 1 1.1 Einführung.......................................... 1 1.1.1 Grundsätzliches über das Messen.......................
Ihr Smartphone wird zur Fernsteuerung für universale Automationsfunktionen.
 1 idom KNX phone Steuern und überwachen Sie Ihre KNX Hausautomationsanlage von Ihrem Smartphone. Sie haben Zugriff auf folgende Automatisationsfunktionen : - Beleuchtung, Intensität der Dimmer - Heraufziehen
1 idom KNX phone Steuern und überwachen Sie Ihre KNX Hausautomationsanlage von Ihrem Smartphone. Sie haben Zugriff auf folgende Automatisationsfunktionen : - Beleuchtung, Intensität der Dimmer - Heraufziehen
Seit 1995 kreativer, vielseitiger Partner rund ums Messen mechanischer, thermischer & elektrischer Grössen
 Seit 1995 kreativer, vielseitiger Partner rund ums Messen mechanischer, thermischer & elektrischer Grössen SENSORIK Messwertgeber und Elektronik zum Messen mechanischer Kräfte und Grössen Zug-, Druckkraft,
Seit 1995 kreativer, vielseitiger Partner rund ums Messen mechanischer, thermischer & elektrischer Grössen SENSORIK Messwertgeber und Elektronik zum Messen mechanischer Kräfte und Grössen Zug-, Druckkraft,
Verwendungszweck elektronischer Kameras
 Verwendungszweck elektronischer Kameras - Erfassung von Objekten durch optische Abbildung (= zweidimensionale Helligkeitsverteilung) und Umwandlung in elektrische Signale. Anschließend Digitalisierung
Verwendungszweck elektronischer Kameras - Erfassung von Objekten durch optische Abbildung (= zweidimensionale Helligkeitsverteilung) und Umwandlung in elektrische Signale. Anschließend Digitalisierung
UNTERNEHMENSPRÄSENTATION
 UNTERNEHMENSPRÄSENTATION SICK AUF EINEN BLICK SICK weltweit einer der führenden Hersteller von Sensoren und Sensorlösungen für industrielle Anwendungen 2 VERLÄSSLICHER PARTNER FÜR SENSORLÖSUNGEN AUF DIE
UNTERNEHMENSPRÄSENTATION SICK AUF EINEN BLICK SICK weltweit einer der führenden Hersteller von Sensoren und Sensorlösungen für industrielle Anwendungen 2 VERLÄSSLICHER PARTNER FÜR SENSORLÖSUNGEN AUF DIE
Mit Hochfrequenz messen, melden und übertragen. Eine Systemtechnik für Logistik und Schifffahrt
 Die Philosophie Mit Hochfrequenz messen, melden und übertragen Eine Systemtechnik für Logistik und Schifffahrt Präsentation 01.09.11 Die Story Die Basis : Sensortechnik und Info-Übertragung mittels Hochfrequenz
Die Philosophie Mit Hochfrequenz messen, melden und übertragen Eine Systemtechnik für Logistik und Schifffahrt Präsentation 01.09.11 Die Story Die Basis : Sensortechnik und Info-Übertragung mittels Hochfrequenz
WARNUNG! Nicht für Kinder unter 36 Monate wegen verschluckbarer Kleinteile geeignet - Erstickungsgefahr. Made in China, im Namen der TTS Group Ltd
 Garantie & Support Dieses Produkt wird mit einem Jahr Garantie für Probleme versehen, die während der normalen Nutzung auftreten. Falsche Handhabung Flexi-Scope oder das Öffnen des Gerätes macht diese
Garantie & Support Dieses Produkt wird mit einem Jahr Garantie für Probleme versehen, die während der normalen Nutzung auftreten. Falsche Handhabung Flexi-Scope oder das Öffnen des Gerätes macht diese
Entwicklungen in der sensorgestützten Sortiertechnik. Univ.-Prof. DI Dr. Roland Pomberger
 Entwicklungen in der sensorgestützten Sortiertechnik Univ.-Prof. DI Dr. Roland Pomberger Frage? Was haben Pommes, Tabletten und der steirische Erzberg mit diesem Thema zu tun? Mein Haus Einsatz von sensorgestützter
Entwicklungen in der sensorgestützten Sortiertechnik Univ.-Prof. DI Dr. Roland Pomberger Frage? Was haben Pommes, Tabletten und der steirische Erzberg mit diesem Thema zu tun? Mein Haus Einsatz von sensorgestützter
Warnhinweis: Schutz vor elektrostatischer Entladung (ESD) 7/3
 7/3") 7 Warnhinweis: Für Arbeiten an Quellen, die eine elektrische Spannung führen, sind ESD-Schuhe nicht geeignet. Schutz vor elektrostatischer Entladung (ESD) So können bereits fünf Volt einen Mikrochip beschädigen
7 Warnhinweis: Für Arbeiten an Quellen, die eine elektrische Spannung führen, sind ESD-Schuhe nicht geeignet. Schutz vor elektrostatischer Entladung (ESD) So können bereits fünf Volt einen Mikrochip beschädigen
Elektrizität in den Themenfeldern 6 und 9
 Elektrizität in den Themenfeldern 6 und 9 1 Intention TF 6 Entwicklung von Vorstellungen zum Energietransport mit dem Träger Elektrizität Energienutzung im Alltag; Einheiten J und kwh Zusammenhang von
Elektrizität in den Themenfeldern 6 und 9 1 Intention TF 6 Entwicklung von Vorstellungen zum Energietransport mit dem Träger Elektrizität Energienutzung im Alltag; Einheiten J und kwh Zusammenhang von
Infrarotsensoren. B. Bilgrim O. Seibertz Gruppe B - 3
 Infrarotsensoren B. Bilgrim O. Seibertz Gruppe B - 3 Inhalt 1. Infrarotstrahlung 2. Erzeugung und Anwendung der IR-Strahlung 3. Für Hinderniserkennung geeignete IR-Sensoren 3.1 Überblick der Möglichkeiten
Infrarotsensoren B. Bilgrim O. Seibertz Gruppe B - 3 Inhalt 1. Infrarotstrahlung 2. Erzeugung und Anwendung der IR-Strahlung 3. Für Hinderniserkennung geeignete IR-Sensoren 3.1 Überblick der Möglichkeiten