Mechatronische Lenksysteme
|
|
|
- Günther Esser
- vor 7 Jahren
- Abrufe
Transkript





1 Juni Mechatronische Lenksysteme Alexander Gaedke ZF Lenksysteme GmbH


2 Juni im Kurzprofil ZF Lenksysteme entwickelt und produziert Lenkungstechnik für Pkw und Nutzfahrzeuge. Führungsgesellschaft: ZF Lenksysteme GmbH, Schwäbisch Gmünd Geschäftsfelder: Pkw-Lenkungen, Lenkungspumpen, Pkw-Lenksäulen, Nkw-Lenkungen, Nkw-Lenksäulen Umsatz: Mio. Mitarbeiter: Pkw-Aktivlenkung Investitionen: 102 Mio.

3 Juni Weltweite Standorte Standorte: 18 Länder: 11 Regionen: 4

4 Juni Umsatzentwicklung Mio Sonstiges Nkw-Lenkungen & Nkw-Lenksäulen Pumpen Pkw-Lenksäulen Pkw-Lenkungen

5 Juni Mitarbeiter
6 Juni Kunden im Bereich Pkw

7 Lenksysteme mechanische Lenkung mechanische Lenkung 1932 Juni



8 Lenksysteme Hydrauliklenkung Lenkung mit hydraulischer Servounterstützung 1969 Juni


9 Lenksysteme Hydrauliklenkung Zahnstangenhydrolenkung (ZHL) im RO 80 von 1973 Juni
10 Lenksysteme Hydrauliklenkung Zahnstangenhydolenkung (ZHL) Juni Stand der Technik ist nach wie vor die hydraulische Servolenkung
11 Lenksysteme Hydrauliklenkung die Unterstützungskennlinie Juni die Unterstützungskennlinie bestimmt wesentlich die Charakteristik der Lenkung Komfort Sport Unterstützungskraft Fahrzeuggeschwindigkeit Fahrzeuggeschwindigkeit Lenkradmoment


12 Lenksysteme Hydrauliklenkung wesentliche Funktionsparameter einer ZHL Juni Variable Übersetzung Hydraulische Endbegrenzung Einstellbare Dämpfung Geschwindigkeitsabh. Unterstützung H/Udr. P P v LRW Q M T



13 Lenksysteme Elektrolenkung Patentschrift von 1917 zu einem Steer by Wire System Juni

 Juni 2005 14")
14 Lenksysteme Elektrolenkung Funktionsprinzip der Elektrolenkung (EPS) Juni


15 Lenksysteme Elektrolenkung Anordnungsprinzipien heutiger Elektrolenkungen Juni Lenksäule Ritzel Doppelritzel Achsparallel
16 Lenksysteme Elektrolenkung Einsatzgebiete von Elektrolenkungen Juni Fahrzeugsegmente Zahnstangenkräfte [N] SUV/LKW Oberklasse Obere Mittelklasse Mittelklasse Untere 8500 Mittelklasse Klein- und Kleinstwagen Lenksäule Ritzel Doppelritzel Achsparallel


17 Lenksysteme Aktivlenkung (AS) Winkelüberlagerung durch Elektromotor Juni δ S Planetengetriebe δ + δ V Lenkgetrieb e M M E-Motor
18 Lenksysteme Aktivlenkung Funktionsprinzip der Winkelüberlagerung Juni
19 Lenksysteme Funktionalität Juni Steer by Wire nahe Funktionalität Fahrdynamikregelung AS Spurführung Übersetzungsänderung AS HMS Spurführung Parkmanöverassistent ZHL geschwindigkeitsabh. Unterstützung i var Servounterstützung EPS Hydraulik Moment Winkel Elektrik




20 Lenksysteme EPS als mechatronisches System Komponenten einer Doppelritzel-Elektro-Lenkung Juni Momentensensor Getriebe ECU Motor
21 Lenksysteme EPS als mechatronisches System das Steuergerät Juni ECU
 / < 85A Hohe Schwingungsanforderungen Watfähig 32bit μc mit DSP Funktion Überwachungsprozessor FET Leistungsteil CAN Kommunikation End of Line")
22 Lenksysteme EPS als mechatronisches System das Steuergerät Temperaturbereich: -40 C bis +120 C Spannungsbereich: (6V) 10 V... 16V (28V) / < 85A Hohe Schwingungsanforderungen Watfähig 32bit μc mit DSP Funktion Überwachungsprozessor FET Leistungsteil CAN Kommunikation End of Line Programmierung (flash version) Juni

23 Lenksysteme EPS als mechatronisches System das Steuergerät Juni Gehäuse mit Substrat Stanzgitterrahmen Eingangsbeschaltung Zwischenkreis Kondensatoren Gehäuse


24 Lenksysteme EPS als mechatronisches System das Steuergerät Juni Generation I Sensor als separates Bauteil Generation II Sensor auf dem Substrat integriert Sensor
25 Lenksysteme Funktionsanforderungen Einteilung der Lenkfunktionen Juni Lenkfunktionen Fahrzeugebene Parkmanöverassistent Fahrdynamikregelung Spurführung Fahrerwarnung Überlagerte Lenkfunktionen Variable Übersetzung Aktiver Rücklauf Geradeauslaufkorrektur Variabler Lenkanschlag Grundlenkfunktionen Variable Unterstützung Reibungskompensation Aktive Dämpfung Fahrbahnrückmeldung Lenkgefühl
26 Lenksysteme Funktionsanforderungen die Regelungsgrundstruktur Juni Eingang Steuerlogik Sollwert Lenkwinkel extern intern Reibungskompensation Lenkradmoment Motordrehzahl Lenkwinkelgeschw. Fahrzeuggeschw. Unterstützung Geradeauslauf Aktiver Rücklauf + Regler Trägheitskompensation Motor moment
27 Lenksysteme Funktionsanforderungen Einteilung der Lenkfunktionen Juni Lenkfunktionen Fahrzeugebene Parkmanöverassistent Fahrdynamikregelung Spurführung Fahrerwarnung Überlagerte Lenkfunktionen Variable Übersetzung Aktiver Rücklauf Geradeauslaufkorrektur Variabler Lenkanschlag Grundlenkfunktion Variable Unterstützung Reibungskompensation Aktive Dämpfung Fahrbahnrückmeldung Lenkgefühl


28 Lenksysteme Funktionsanforderungen Assistenzfunktion Parkmanöverassistent Einparkassistent: Durch semiautonome Fahrzeugführung Juni



29 Lenksysteme Funktionsanforderungen Einteilung der Lenkfunktionen Juni Lenkfunktionen Fahrzeugebene Parkmanöverassistent Fahrdynamikregelung Spurführung Fahrerwarnung Überlagerte Lenkfunktionen Variable Übersetzung Aktiver Rücklauf Geradeauslaufkorrektur Variabler Lenkanschlag Grundlenkfunktion Variable Unterstützung Reibungskompensation Aktive Dämpfung Fahrbahnrückmeldung Lenkgefühl
30 Lenksysteme Funktionsanforderungen Gierratenregelung mit AFS Juni Lenkwinkel [ ] Gierrate [ /s] ohne Gierratenregelung mit Gierratenregelung











31 Lenksysteme Funktionsanforderungen Mehrwert durch Vernetzung Juni Individualisierung Antriebsmoment IWD Individualisierung Radstellung Individualisierung Radlast Optimierung Reifenkraftpotential
32 Lenksysteme Funktionsanforderungen Mehrwert durch Vernetzung Juni dezentral zentral Friedliche Koexistenz Koordinator Zentral- Regler TV ARS AFS ESP VDM Intelligente Steller Aktuatoren
33 Lenksysteme Funktionsanforderungen Mehrwert durch Vernetzung Juni Fahrzeugkoordinator Vertikaldynamik Koordinator Längs- und Querdynamik Koordinator Koordination LF CDC ARS EGS VTG HAQ AS MS EHB Intelligente Steller LF Luftfeder CDC Elektronische Dämpfer ARS Aktiver Stabilisator EGS Getriebesteuerung VTG Verteilergetriebe HAQ Hinterachsgetriebe mit Sperre AS Aktivlenkung MS Motorsteuerung EHB Elektr. Hydr. Bremssystem



34 Juni Lenksysteme Funktionsanforderungen Mehrwert durch Vernetzung Ausgang: μ high μ low Fahrmanöver: Beschleunigen auf μ-split Problematik: Giermoment in Richtung μ low Lösung: Korrektur mit Aktivlenkung Lösung: Giermoment Korrekturmoment Funktionalität: volle Traktion Sicherheit: spurstabiles Fahrzeug
35 Juni Mechatronische Lenksysteme Alexander Gaedke ZF Lenksysteme GmbH
Mechatronische Lenksysteme
 Fuldaer Elektrotechnik-Seminar 2007 Eingebettete Systeme in der Kfz - Technik Mechatronische Lenksysteme Alexander Gaedke Leiter Zentrale Entwicklung Elektronik und Funktionen 20. April 2007 1 ZFLS- Daten
Fuldaer Elektrotechnik-Seminar 2007 Eingebettete Systeme in der Kfz - Technik Mechatronische Lenksysteme Alexander Gaedke Leiter Zentrale Entwicklung Elektronik und Funktionen 20. April 2007 1 ZFLS- Daten
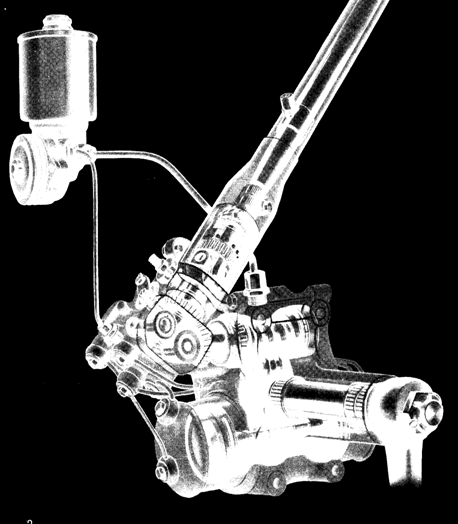
ZF-Servotwin das elektro-hydraulische Lenksystem für Nutzfahrzeuge
 ZF-Servotwin das elektro-hydraulische Lenksystem für Nutzfahrzeuge ZF-Servotwin Die Zukunft beginnt heute. ZF Lenksysteme ist weltweit Technologieführer im Bereich Lenksysteme für Nutzfahrzeuge. Daraus
ZF-Servotwin das elektro-hydraulische Lenksystem für Nutzfahrzeuge ZF-Servotwin Die Zukunft beginnt heute. ZF Lenksysteme ist weltweit Technologieführer im Bereich Lenksysteme für Nutzfahrzeuge. Daraus
ZF Lenksysteme präsentiert energiesparende Nutzfahrzeug Innovationen
 PRESSEINFORMATION September 2014 ZF Lenksysteme präsentiert energiesparende Nutzfahrzeug Innovationen Mobile Rangierfunktion für Lang-Lkw ZFLS entwickelt Steuerungs-Software für mobile Geräte ZF-Servotwin
PRESSEINFORMATION September 2014 ZF Lenksysteme präsentiert energiesparende Nutzfahrzeug Innovationen Mobile Rangierfunktion für Lang-Lkw ZFLS entwickelt Steuerungs-Software für mobile Geräte ZF-Servotwin
Steer-by-Wire-Systeme. Stand und Entwicklungsaussichten
 Steer-by-Wire-Systeme Stand und Entwicklungsaussichten Dipl.-Ing. Thomas Barthenheier, Fachgebiet Fahrzeugtechnik, TU Darmstadt Ba - Folie-Nr. 1/26 Definition von Steer-by-Wire Keine energetische Kopplung
Steer-by-Wire-Systeme Stand und Entwicklungsaussichten Dipl.-Ing. Thomas Barthenheier, Fachgebiet Fahrzeugtechnik, TU Darmstadt Ba - Folie-Nr. 1/26 Definition von Steer-by-Wire Keine energetische Kopplung
Beitrag von FEMAG zur Optimierung der Ausnutzung des Wechselrichters in Lenkungsantrieben durch Identifikation von Längs- und Querinduktivitäten
 Beitrag von FEMAG zur Optimierung der Ausnutzung des Wechselrichters in Lenkungsantrieben durch Identifikation von Längs- und Querinduktivitäten Dipl.-Ing. Torsten Voigt Dr.-Ing. Karl-Hermann Ketteler
Beitrag von FEMAG zur Optimierung der Ausnutzung des Wechselrichters in Lenkungsantrieben durch Identifikation von Längs- und Querinduktivitäten Dipl.-Ing. Torsten Voigt Dr.-Ing. Karl-Hermann Ketteler
Elektrische Servolenkung ZF-Servolectric
 Elektrische Servolenkung ZF-Servolectric Einführung Die Servolenkung soll bei geringem Kraftaufwand eine möglichst direkte Lenkung ermöglichen. Dabei soll der Fahrer den Kontakt zur Fahrbahn behalten und
Elektrische Servolenkung ZF-Servolectric Einführung Die Servolenkung soll bei geringem Kraftaufwand eine möglichst direkte Lenkung ermöglichen. Dabei soll der Fahrer den Kontakt zur Fahrbahn behalten und
Tilman Bünte DLR Oberpfaffenhofen, Tag der offenen Tür 24. Oktober 2004
 Tilman Bünte DLR Oberpfaffenhofen, Tag der offenen Tür 24. Oktober 2004 Institut für Robotik und Mechatronik Institut für Robotik und Mechatronik 1 Mechatronik Mechanik Elektronik Software Mechatronik
Tilman Bünte DLR Oberpfaffenhofen, Tag der offenen Tür 24. Oktober 2004 Institut für Robotik und Mechatronik Institut für Robotik und Mechatronik 1 Mechatronik Mechanik Elektronik Software Mechatronik
Die elektro-mechanische Servolenkung mit Doppelritzel
 Service Training Selbststudienprogramm 317 Die elektro-mechanische Servolenkung mit Doppelritzel Konstruktion und Funktion Die elektro-mechanische Servolenkung hat gegenüber einer hydraulischen Lenkung
Service Training Selbststudienprogramm 317 Die elektro-mechanische Servolenkung mit Doppelritzel Konstruktion und Funktion Die elektro-mechanische Servolenkung hat gegenüber einer hydraulischen Lenkung
Aktive Fahrwerksysteme
 Bildquelle: Mercedes AGVS Ausbildungszentrum Berner Oberland 1/12 INHALTSVERZEICHNIS GEREGELTES DÄMPFUNGSSYSTEM... 3 Aufgabe:...3 Technik:...3 Bauteile...4 Systemverknüpfungen...5 Systemübersicht...6 Funktionsplan...6
Bildquelle: Mercedes AGVS Ausbildungszentrum Berner Oberland 1/12 INHALTSVERZEICHNIS GEREGELTES DÄMPFUNGSSYSTEM... 3 Aufgabe:...3 Technik:...3 Bauteile...4 Systemverknüpfungen...5 Systemübersicht...6 Funktionsplan...6
Allradantriebsstrang des Porsche 911
 Bild 4.2_1 Quelle: www.porsche.com Allradantriebsstrang des Porsche 911 Bild 4.2_2 Systemkomponenten eines automatisierten Schaltgetriebes Druckspeicher Sensor Hydraulikeinheit Ölbehälter Hydraulikpumpe
Bild 4.2_1 Quelle: www.porsche.com Allradantriebsstrang des Porsche 911 Bild 4.2_2 Systemkomponenten eines automatisierten Schaltgetriebes Druckspeicher Sensor Hydraulikeinheit Ölbehälter Hydraulikpumpe
ZF-Aktivlenkung in der Lenksäule für Pkw der Mittel- und Oberklasse
 ZF-Aktivlenkung in der Lenksäule für Pkw der Mittel- und Oberklasse Aktiv lenken Die ZF-Aktivlenkung für erhöhten Fahrkomfort und aktive Sicherheit. Der moderne Automobilbau mit seiner ständigen Weiterentwicklung
ZF-Aktivlenkung in der Lenksäule für Pkw der Mittel- und Oberklasse Aktiv lenken Die ZF-Aktivlenkung für erhöhten Fahrkomfort und aktive Sicherheit. Der moderne Automobilbau mit seiner ständigen Weiterentwicklung
PRESSEINFORMATION PRESS INFORMATION
 PRESSEINFORMATION PRESS INFORMATION ZF Lenksysteme präsentiert energiesparende Nutzfahrzeug Innovationen Mobile Rangierfunktion für Eurocombi ZFLS entwickelt Steuerungs-Software für mobile Geräte ZF-Servotwin
PRESSEINFORMATION PRESS INFORMATION ZF Lenksysteme präsentiert energiesparende Nutzfahrzeug Innovationen Mobile Rangierfunktion für Eurocombi ZFLS entwickelt Steuerungs-Software für mobile Geräte ZF-Servotwin
Servolectric Elektromechanisches Lenksystem für ein dynamisches Fahrgefühl und hochautomatisierte Funktionen
 Servolectric Elektromechanisches Lenksystem für ein dynamisches Fahrgefühl und hochautomatisierte Funktionen Vernetzte Mobilität Automatisiertes Fahren Antriebssysteme und Elektrifizierung max Fakten zur
Servolectric Elektromechanisches Lenksystem für ein dynamisches Fahrgefühl und hochautomatisierte Funktionen Vernetzte Mobilität Automatisiertes Fahren Antriebssysteme und Elektrifizierung max Fakten zur
Servolectric Elektromechanisches Lenksystem für ein dynamisches Fahrgefühl und hochautomatisierte Funktionen
 Servolectric Elektromechanisches Lenksystem für ein dynamisches Fahrgefühl und hochautomatisierte Funktionen Vernetzte Mobilität Automatisiertes Fahren Antriebssysteme und Elektrifizierung Servolectric
Servolectric Elektromechanisches Lenksystem für ein dynamisches Fahrgefühl und hochautomatisierte Funktionen Vernetzte Mobilität Automatisiertes Fahren Antriebssysteme und Elektrifizierung Servolectric
Evolution der Bremsanlagen
 Bild 5.5_1 Evolution der Bremsanlagen Bild 5.5_2 Quelle: Breuer Systemvergleich Heute-Morgen Bild 5.5_3 Übersicht Brake by Wire Systeme Bild 5.5_4 Druckversorgungseinheit Pedalmodul s U Controller Radbremse
Bild 5.5_1 Evolution der Bremsanlagen Bild 5.5_2 Quelle: Breuer Systemvergleich Heute-Morgen Bild 5.5_3 Übersicht Brake by Wire Systeme Bild 5.5_4 Druckversorgungseinheit Pedalmodul s U Controller Radbremse
Neue Lenksysteme für die Mobilität von morgen
 Neue Lenksysteme für die Mobilität von morgen Bosch Mobility Solutions Servolectric elektrische Lenksysteme für Pkw Automatisiertes Fahren Failoperational Vernetzte Mobilität Automatisierte Mobilität Antriebssysteme
Neue Lenksysteme für die Mobilität von morgen Bosch Mobility Solutions Servolectric elektrische Lenksysteme für Pkw Automatisiertes Fahren Failoperational Vernetzte Mobilität Automatisierte Mobilität Antriebssysteme
Energieverbrauch von Nebenaggregaten
 n Energiebilanz Energieverbrauch Entscheidung Trennung Antrieb Wie viel Energie geht in die Nebenaggregate in Abhängigkeit von Fahr-und Betriebszuständen Potential der Absenkung des Gesamtenergieverbrauchs
n Energiebilanz Energieverbrauch Entscheidung Trennung Antrieb Wie viel Energie geht in die Nebenaggregate in Abhängigkeit von Fahr-und Betriebszuständen Potential der Absenkung des Gesamtenergieverbrauchs
Neu im Bosch-Programm: Lenksysteme für Pkw und Lkw
 Neu im Bosch-Programm: Lenksysteme für Pkw und Lkw Immer sicher in der Spur mit Lenksystemen und -komponenten von Bosch Haupteinsatzbereiche Hydraulische Elektro- Elektrolenkung Aktiv- Lenkung lenkung
Neu im Bosch-Programm: Lenksysteme für Pkw und Lkw Immer sicher in der Spur mit Lenksystemen und -komponenten von Bosch Haupteinsatzbereiche Hydraulische Elektro- Elektrolenkung Aktiv- Lenkung lenkung
Nutzen von Steer by wire im Nutzfahrzeug
 Tagung Aktive Sicherheit durch Fahrerassistenz Technische Universität München, Garching 11-12.03.04 Nutzen von Steer by wire im Nutzfahrzeug Dipl. Ing. Klaus Negele, MAN Nutzfahrzeuge AG 1 von SBW e zwischen
Tagung Aktive Sicherheit durch Fahrerassistenz Technische Universität München, Garching 11-12.03.04 Nutzen von Steer by wire im Nutzfahrzeug Dipl. Ing. Klaus Negele, MAN Nutzfahrzeuge AG 1 von SBW e zwischen
Real Time Maintenance mit dem efector octavis
 Real Time Maintenance mit dem efector octavis Marvin Schlieker ZF Friedrichshafen AG Agenda Kurzvorstellung ZF Friedrichshafen AG Maschinenübersicht Erfahrungen Condition Monitoring Kollision Defektes
Real Time Maintenance mit dem efector octavis Marvin Schlieker ZF Friedrichshafen AG Agenda Kurzvorstellung ZF Friedrichshafen AG Maschinenübersicht Erfahrungen Condition Monitoring Kollision Defektes
Busarchitektur beim VDM
 Vortrag zur PEARL 2003 Boppard, den 27.11.2003 Realisierung einer zeitgesteuerten, verteilten Regelung mit einem CAN-TTCAN-Gateway A. Albert*, R. Strasser** * Robert Bosch GmbH, Schwieberdingen ** Institut
Vortrag zur PEARL 2003 Boppard, den 27.11.2003 Realisierung einer zeitgesteuerten, verteilten Regelung mit einem CAN-TTCAN-Gateway A. Albert*, R. Strasser** * Robert Bosch GmbH, Schwieberdingen ** Institut
Vorwort der Herausgeber... V Gastvorwort... VI Die Herausgeber... VII Autorenverzeichnis... IX Abkürzungs- und Formelverzeichnis...
 Vorwort der Herausgeber... V Gastvorwort... VI Die Herausgeber... VII Autorenverzeichnis... IX Abkürzungs- und Formelverzeichnis...XXVII A Einleitung und Geschichte... 1 Definition und Abgrenzung... 2
Vorwort der Herausgeber... V Gastvorwort... VI Die Herausgeber... VII Autorenverzeichnis... IX Abkürzungs- und Formelverzeichnis...XXVII A Einleitung und Geschichte... 1 Definition und Abgrenzung... 2
HiL-Simulation für die Entwicklung und den Test von Algorithmen für Lenksysteme
 VDI-Tagung Mechatronik 29, Wiesloch, 12.-13. Mai 29 HiL-Simulation für die Entwicklung und den Test von Algorithmen für Lenksysteme Dipl.-Ing. Thorben Herfeld, DMecS - Development of Mechatronic Systems
VDI-Tagung Mechatronik 29, Wiesloch, 12.-13. Mai 29 HiL-Simulation für die Entwicklung und den Test von Algorithmen für Lenksysteme Dipl.-Ing. Thorben Herfeld, DMecS - Development of Mechatronic Systems
Der Normalfahrer als Messgröße für die Optimierung und Absicherung aktiver fahrdynamischer Regelsysteme
 Lehrstuhl für Fahrzeugtechnik Technische Universität München Univ.-Prof. Dr.-Ing. Bernd Heißing Der Normalfahrer als Messgröße für die Optimierung und Absicherung aktiver fahrdynamischer Regelsysteme.
Lehrstuhl für Fahrzeugtechnik Technische Universität München Univ.-Prof. Dr.-Ing. Bernd Heißing Der Normalfahrer als Messgröße für die Optimierung und Absicherung aktiver fahrdynamischer Regelsysteme.
ZF-Servolectric Die elektrische Servolenkung für Pkw und leichte Nutzfahrzeuge
 ZF-Servolectric Die elektrische Servolenkung für Pkw und leichte Nutzfahrzeuge Elektrische Servolenkung ZF-Servolectric Eine Servo-Lösung, die elektrisiert Top-Fahrkomfort und unübertroffene Präzision
ZF-Servolectric Die elektrische Servolenkung für Pkw und leichte Nutzfahrzeuge Elektrische Servolenkung ZF-Servolectric Eine Servo-Lösung, die elektrisiert Top-Fahrkomfort und unübertroffene Präzision
VARIOSERV. Die Energiesparpumpe für Nutzfahrzeuge
 VARIOSERV Die Energiesparpumpe für Nutzfahrzeuge Volle Power - sparsam und ökologisch. Die Nutzfahrzeugindustrie entwickelt sich technologisch ständig weiter, die ökologischen und ökonomischen Rahmenbedingungen
VARIOSERV Die Energiesparpumpe für Nutzfahrzeuge Volle Power - sparsam und ökologisch. Die Nutzfahrzeugindustrie entwickelt sich technologisch ständig weiter, die ökologischen und ökonomischen Rahmenbedingungen
Übung zur Vorlesung Grundlagen der Fahrzeugtechnik. Übung
 Institut für Fahrzeugsystemtechnik Lehrstuhl für Fahrzeugtechnik Leiter: Prof. Dr. rer. nat. Frank Gauterin Fritz-Erler-Str. 1-3 76133 Karlsruhe Übung zur Vorlesung Grundlagen der Fahrzeugtechnik Übung
Institut für Fahrzeugsystemtechnik Lehrstuhl für Fahrzeugtechnik Leiter: Prof. Dr. rer. nat. Frank Gauterin Fritz-Erler-Str. 1-3 76133 Karlsruhe Übung zur Vorlesung Grundlagen der Fahrzeugtechnik Übung
ZF-Servolectric Servoeinheit achsparallel
 ZF-Servolectric Servoeinheit achsparallel 2 1 5 3 4 dynamischen Sportwagen, über obere Mittelklassewagen, bis hin zu Hochlastfahrzeugen, wie z.b. Geländewagen und Transportern. Durch die Kombination aus
ZF-Servolectric Servoeinheit achsparallel 2 1 5 3 4 dynamischen Sportwagen, über obere Mittelklassewagen, bis hin zu Hochlastfahrzeugen, wie z.b. Geländewagen und Transportern. Durch die Kombination aus
Drehmomentenregelung in Simulation und Praxis eines elektromechanischen Lenksystems mit Zahnriemenantrieb
 Drehmomentenregelung in Simulation und Praxis eines elektromechanischen Lenksystems mit Zahnriemenantrieb M. Bröcker, R. Neuking, F. Jähde, Düsseldorf Kurzfassung: In diesem Beitrag wird eine elektromechanische
Drehmomentenregelung in Simulation und Praxis eines elektromechanischen Lenksystems mit Zahnriemenantrieb M. Bröcker, R. Neuking, F. Jähde, Düsseldorf Kurzfassung: In diesem Beitrag wird eine elektromechanische
Beim Lenkungstausch den richtigen Weg einschlagen
 Seite 1/5, 16.09.2014 Beim Lenkungstausch den richtigen Weg einschlagen Expertentipps für den Austausch der ZF- Servolectric Diagnosesystem ZF-Testman für Programmierung der Kennlinie im Servolectric-Steuergerät
Seite 1/5, 16.09.2014 Beim Lenkungstausch den richtigen Weg einschlagen Expertentipps für den Austausch der ZF- Servolectric Diagnosesystem ZF-Testman für Programmierung der Kennlinie im Servolectric-Steuergerät
Evolution der Bremsanlagen
 Bild 5.5_1 Evolution der Bremsanlagen Bild 5.5_2 Quelle: Breuer Systemvergleich Heute-Morgen Bild 5.5_3 Übersicht Brake by Wire Systeme Bild 5.5_4 Druckversorgungseinheit Pedalmodul s U Controller Radbremse
Bild 5.5_1 Evolution der Bremsanlagen Bild 5.5_2 Quelle: Breuer Systemvergleich Heute-Morgen Bild 5.5_3 Übersicht Brake by Wire Systeme Bild 5.5_4 Druckversorgungseinheit Pedalmodul s U Controller Radbremse
2. Tagung Aktive Sicherheit durch Fahrerassistenz April 2006, TU-München, Garching
 2. Tagung Aktive Sicherheit durch Fahrerassistenz 4.-5. April 2006, TU-München, Garching Aktive Fahrerunterstützung durch Störgrößenkompensation mittels Steer by Wire im Nutzfahrzeug Active drivers support
2. Tagung Aktive Sicherheit durch Fahrerassistenz 4.-5. April 2006, TU-München, Garching Aktive Fahrerunterstützung durch Störgrößenkompensation mittels Steer by Wire im Nutzfahrzeug Active drivers support
BMW 5er F11 ( ) Fahrwerk und Bremsen Band 1
 Fahrwerk und Bremsen Band 1") BMW 5er F11 (2009-2016) Fahrwerk und Bremsen Band 1 1 Reparaturarbeiten dürfen nur von geschultem Fachpersonal durchgeführt werden. Bitte nutzen Sie bei allen Reparaturen die aufgeführten Spezialwerkzeuge.
BMW 5er F11 (2009-2016) Fahrwerk und Bremsen Band 1 1 Reparaturarbeiten dürfen nur von geschultem Fachpersonal durchgeführt werden. Bitte nutzen Sie bei allen Reparaturen die aufgeführten Spezialwerkzeuge.
ZFLS-Servoline Die Linearlenkung für Nutzfahrzeuge
 ZFLS-Servoline Die Linearlenkung für Nutzfahrzeuge ZFLS-Servoline erhöht Sicherheit und Komfort Die Nutzfahrzeug-Branche steht vor komplexen Herausforderungen. Hierzu zählen Innovationen wie die Einführung
ZFLS-Servoline Die Linearlenkung für Nutzfahrzeuge ZFLS-Servoline erhöht Sicherheit und Komfort Die Nutzfahrzeug-Branche steht vor komplexen Herausforderungen. Hierzu zählen Innovationen wie die Einführung
Das Faktenbuch. Unternehmensprofil 2013
 Das Faktenbuch Unternehmensprofil 2013 Unser Selbstverständnis Mit unseren Produkten bewegen wir Menschen rund um den Globus. Als weltweit führender Hersteller von Lenksystemen bieten wir ein Höchstmaß
Das Faktenbuch Unternehmensprofil 2013 Unser Selbstverständnis Mit unseren Produkten bewegen wir Menschen rund um den Globus. Als weltweit führender Hersteller von Lenksystemen bieten wir ein Höchstmaß
Fahrdynamik-Regelung
 Rolf Isermann (Hrsg.) Fahrdynamik-Regelung Modellbildung, Fahrerassistenzsysteme, Mechatronik Mit 340 Abbildungen und 28 Tabellen ATZ/MTZ-Fachbuch vieweg IX Inhaltsverzeichnis Das mechatronische Kraftfahrzeug
Rolf Isermann (Hrsg.) Fahrdynamik-Regelung Modellbildung, Fahrerassistenzsysteme, Mechatronik Mit 340 Abbildungen und 28 Tabellen ATZ/MTZ-Fachbuch vieweg IX Inhaltsverzeichnis Das mechatronische Kraftfahrzeug
Werkzeuge für die Diagnose von Lenksystemen. Diagnosewerkzeuge
 Werkzeuge für die Diagnose von Lenksystemen Diagnosewerkzeuge ALLES FÜR IHRE WERKSTATT Für den täglichen Umgang mit Lenkungen und Lenkungsteilen brauchen Sie nicht nur Wissen und Erfahrung, sondern auch
Werkzeuge für die Diagnose von Lenksystemen Diagnosewerkzeuge ALLES FÜR IHRE WERKSTATT Für den täglichen Umgang mit Lenkungen und Lenkungsteilen brauchen Sie nicht nur Wissen und Erfahrung, sondern auch
Fahrzeug-Mechatronik I
 Fahrzeug-Mechatronik I Dieter Ammon / 24.10.2013 1 Vorlesungsinhalt 0. Einführung: Mechatronik in der Fahrzeugtechnik 1. Fahrzeugregelungssysteme 1.1 Brems- und Traktionsregelungen (ABS, ASR, autom. Sperren)
Fahrzeug-Mechatronik I Dieter Ammon / 24.10.2013 1 Vorlesungsinhalt 0. Einführung: Mechatronik in der Fahrzeugtechnik 1. Fahrzeugregelungssysteme 1.1 Brems- und Traktionsregelungen (ABS, ASR, autom. Sperren)
extra Das Projekt Lösungen für automobile Effizienz Auszug Fahrwerk und Lenkung: ENTWICKLUNGSPLATTFORM FÜR KÜNFTIGE STEER-BY-WIRE-LENKUNGEN
 extra Oktober 214 Auszug Fahrwerk und Lenkung: ENTWICKLUNGSPLATTFORM FÜR KÜNFTIGE STEER-BY-WIRE-LENKUNGEN Das Projekt Lösungen für automobile Effizienz FAHRWERK UND LENKUNG ENTWICKLUNGSPLATTFORM FÜR KÜNFTIGE
extra Oktober 214 Auszug Fahrwerk und Lenkung: ENTWICKLUNGSPLATTFORM FÜR KÜNFTIGE STEER-BY-WIRE-LENKUNGEN Das Projekt Lösungen für automobile Effizienz FAHRWERK UND LENKUNG ENTWICKLUNGSPLATTFORM FÜR KÜNFTIGE
Simpack-Echtzeitmodelle für eine Mehrprozessor-HIL Anwendung Uwe Heitz ZF Friedrichshafen AG. ZF Friedrichshafen AG, 2006
 Simpack-Echtzeitmodelle für eine Mehrprozessor-HIL Anwendung Uwe Heitz ZF Friedrichshafen AG ZF Friedrichshafen AG, 2006 Softwaretest bei ZF Friedrichshafen Testmethode HiL Prototyp Verbundtest SiL Hardware-in-the-Loop
Simpack-Echtzeitmodelle für eine Mehrprozessor-HIL Anwendung Uwe Heitz ZF Friedrichshafen AG ZF Friedrichshafen AG, 2006 Softwaretest bei ZF Friedrichshafen Testmethode HiL Prototyp Verbundtest SiL Hardware-in-the-Loop
LENKWINKELSTELLER: HIGH-PERFORMANCE ZU ATTRAKTIVEN KOSTEN
 extra Auszug Fahrwerk und Lenkung: LENKWINKELSTELLER: HIGH-PERFORMANCE ZU ATTRAKTIVEN KOSTEN Das Projekt Lösungen für automobile Effizienz FAHRWERK UND LENKUNG LENKWINKELSTELLER: HIGH-PERFORMANCE ZU ATTRAKTIVEN
extra Auszug Fahrwerk und Lenkung: LENKWINKELSTELLER: HIGH-PERFORMANCE ZU ATTRAKTIVEN KOSTEN Das Projekt Lösungen für automobile Effizienz FAHRWERK UND LENKUNG LENKWINKELSTELLER: HIGH-PERFORMANCE ZU ATTRAKTIVEN
Anforderung an die Antischlupfregelung. Mechatronische Systemtechnik im KFZ Kapitel 5: Fahrerassistenzsysteme Prof. Dr.-Ing. Tim J.
 Bild 5.2_1 Die Antriebsschlupfregelung muss grundsätzlich das Durchdrehen der Räder, auch bei µ-änderungen, verhindern Bei folgenden Verkehrssituationen muss die Antriebsschlupfregelung das Durchdrehen
Bild 5.2_1 Die Antriebsschlupfregelung muss grundsätzlich das Durchdrehen der Räder, auch bei µ-änderungen, verhindern Bei folgenden Verkehrssituationen muss die Antriebsschlupfregelung das Durchdrehen
Um mit den neuen Sicherheitsund
 technik automechanika Unterstützung für Prüfingenieure Ab Sommer kommenden Jahres nutzen die Prüfingenieure der Dekra einen sogenannten HU-Adapter bei der Hauptuntersuchung. Um mit den neuen Sicherheitsund
technik automechanika Unterstützung für Prüfingenieure Ab Sommer kommenden Jahres nutzen die Prüfingenieure der Dekra einen sogenannten HU-Adapter bei der Hauptuntersuchung. Um mit den neuen Sicherheitsund




1.1! Vorbemerkungen und Überblick
 Elektronik im Auto 1970! Zündung! Uhr! Radio 1 Elektronik im Auto zur Zeit Komfort:! Navigation! Unterhaltung! Kommunikation! Zentralverschluß! Kontrollierte Innenbeleuchtung! Alarmanlage! Einparkhilfe
Elektronik im Auto 1970! Zündung! Uhr! Radio 1 Elektronik im Auto zur Zeit Komfort:! Navigation! Unterhaltung! Kommunikation! Zentralverschluß! Kontrollierte Innenbeleuchtung! Alarmanlage! Einparkhilfe
Bedeutung von Hardware in the Loop in der Automobilindustrie
 Bedeutung von Hardware in the Loop in der Automobilindustrie Arbeitskreis Mechatronik an der FH Pforzheim, 15. April 2004 Tobias Rothmund IPG Automotive GmbH Vorstellung Dipl.-Ing. (FH) Tobias Rothmund
Bedeutung von Hardware in the Loop in der Automobilindustrie Arbeitskreis Mechatronik an der FH Pforzheim, 15. April 2004 Tobias Rothmund IPG Automotive GmbH Vorstellung Dipl.-Ing. (FH) Tobias Rothmund
Premium 3. Mobilität. Dynamik. Innovation.
 Premium 3 Mobilität. Dynamik. Innovation. Firmendaten Gründung: 2006 (ehemals Schaeffler Gruppe) Umsatz 2011: 300 Mio. Euro Mitarbeiter: 1.400 Werke: Eigentümer: 2 in Deutschland, 1 in Bulgarien, 1 in
Premium 3 Mobilität. Dynamik. Innovation. Firmendaten Gründung: 2006 (ehemals Schaeffler Gruppe) Umsatz 2011: 300 Mio. Euro Mitarbeiter: 1.400 Werke: Eigentümer: 2 in Deutschland, 1 in Bulgarien, 1 in
TRUST US, WE ARE KIOTI MECHRON. Herbst Winter. Transport- und Nutzfahrzeuge
 MECHRON Herbst Winter TRUST US, WE ARE KIOTI Transport- und Nutzfahrzeuge Stand 1.8.2016 Mit einer großen Auswahl an praktischem Zubehör und Anbaugeräten sind der Vielseitigkeit keine Grenzen gesetzt.
MECHRON Herbst Winter TRUST US, WE ARE KIOTI Transport- und Nutzfahrzeuge Stand 1.8.2016 Mit einer großen Auswahl an praktischem Zubehör und Anbaugeräten sind der Vielseitigkeit keine Grenzen gesetzt.
Regler- und Funktionsentwicklung mechatronischer Lenksysteme mit Hilfe eines HIL-Fahrsimulators
 Regler- und Funktionsentwicklung mechatronischer Lenksysteme mit Hilfe eines HIL-Fahrsimulators Dipl.-Ing. Steffen Stauder Prof. Dr.-Ing. Steffen Müller Lehrstuhl für Mechatronik in Maschinenbau und Fahrzeugtechnik
Regler- und Funktionsentwicklung mechatronischer Lenksysteme mit Hilfe eines HIL-Fahrsimulators Dipl.-Ing. Steffen Stauder Prof. Dr.-Ing. Steffen Müller Lehrstuhl für Mechatronik in Maschinenbau und Fahrzeugtechnik
Ein Beitrag zur Optimierung des Rückmeldeund Rückstellverhaltens elektromechanischer Servolenkungen
 Ein Beitrag zur Optimierung des Rückmeldeund Rückstellverhaltens elektromechanischer Servolenkungen Von der Fakultät für Ingenieurwissenschaften, Abteilung Maschinenbau der Universität Duisburg-Essen zur
Ein Beitrag zur Optimierung des Rückmeldeund Rückstellverhaltens elektromechanischer Servolenkungen Von der Fakultät für Ingenieurwissenschaften, Abteilung Maschinenbau der Universität Duisburg-Essen zur
Raddrehzahl-Sensoren
 Raddrehzahl-Sensoren Geschichte des ABS 1920: Automobil- und Flugzeugpionier Gabriel Voisin setzt erstmals einen hydraulisch funktionierenden Blockierverhinderer ein. 1936: Patentanmeldung auf eine Vorrichtung
Raddrehzahl-Sensoren Geschichte des ABS 1920: Automobil- und Flugzeugpionier Gabriel Voisin setzt erstmals einen hydraulisch funktionierenden Blockierverhinderer ein. 1936: Patentanmeldung auf eine Vorrichtung
Bedienungsanleitung Operating Instructions. ZF-Servotest 600. ZF Lenksysteme GmbH D Schwäbisch Gmünd Telefon (07171) 31-0 Fax (07171)
 31-0 Fax (07171)") Bedienungsanleitung Operating Instructions ZF-Servotest 600 ZF Lenksysteme GmbH D-73522 Schwäbisch Gmünd Telefon (07171) 31-0 Fax (07171) 31-4396 Inhaltsverzeichnis ZF-Servotest 600 Bedienungsanleitung
Bedienungsanleitung Operating Instructions ZF-Servotest 600 ZF Lenksysteme GmbH D-73522 Schwäbisch Gmünd Telefon (07171) 31-0 Fax (07171) 31-4396 Inhaltsverzeichnis ZF-Servotest 600 Bedienungsanleitung
Positive/Negative Logik
 Positive/Negative Logik Positive Logik Negative Logik Dominant = höherwertig Rezessiv = niederwertig In der Spezifikation ist für den CAN-Datenbus die negative Logik festgelegt worden! Schaltung... Negative
Positive/Negative Logik Positive Logik Negative Logik Dominant = höherwertig Rezessiv = niederwertig In der Spezifikation ist für den CAN-Datenbus die negative Logik festgelegt worden! Schaltung... Negative
AOI in Kombination umfassende Qualitätssicherung komplexer Baugruppen. Dr. Jörg Schambach GÖPEL electronic GmbH
 AOI in Kombination umfassende Qualitätssicherung komplexer Baugruppen Dr. Jörg Schambach GÖPEL electronic GmbH Inhalt Automatisierter Test von Infotainmentkomponenten Warum Automatisierung von Steuergerätetests?
AOI in Kombination umfassende Qualitätssicherung komplexer Baugruppen Dr. Jörg Schambach GÖPEL electronic GmbH Inhalt Automatisierter Test von Infotainmentkomponenten Warum Automatisierung von Steuergerätetests?
Lösungen im Antriebsstrang zur Reduktion des CO 2 Ausstosses
 Lösungen im Antriebsstrang zur Reduktion des CO 2 Ausstosses Stefan Prebeck, ZF do Brasil Ltda. Inhalt ZF im Kurzüberblick Verlustsituation und Einsparpotenziale - Antriebsstrang - Fahrwerk Konventionelle
Lösungen im Antriebsstrang zur Reduktion des CO 2 Ausstosses Stefan Prebeck, ZF do Brasil Ltda. Inhalt ZF im Kurzüberblick Verlustsituation und Einsparpotenziale - Antriebsstrang - Fahrwerk Konventionelle
Lenkungstechnik Willi Elbe GmbH & Co.KG Sandfeld Rippershausen
 Lenkungstechnik Willi Elbe GmbH & Co.KG Sandfeld 20 98639 Rippershausen Allgemeines zur Firma Lenkungstechnik Was stellen wir her? - Die Lenkungs u. Antriebstechnik von Pkw s, Nutzfahrzeugen u. Motorrädern.
Lenkungstechnik Willi Elbe GmbH & Co.KG Sandfeld 20 98639 Rippershausen Allgemeines zur Firma Lenkungstechnik Was stellen wir her? - Die Lenkungs u. Antriebstechnik von Pkw s, Nutzfahrzeugen u. Motorrädern.
EAS von TRW Die neuen elektrischen Servolenkungen
 TRW Automotive Aftermarket EAS von TRW EAS von TRW: eine komplette Produktfamilie von elektrischen Servolenkungen für geringere Entwicklungskosten, kürzere Montagezeiten, vereinfachte Logistik, reduzierten
TRW Automotive Aftermarket EAS von TRW EAS von TRW: eine komplette Produktfamilie von elektrischen Servolenkungen für geringere Entwicklungskosten, kürzere Montagezeiten, vereinfachte Logistik, reduzierten
Einführung in die Robotik
 Einführung in die Robotik Vorlesung 5 27 November 2007 Dr. Mohamed Oubbati Institut für Neuroinformatik WS 2007/2008 Heutiges Thema: Aktoren Einführung Sensoren Mit Hilfe von Sensoren kann ein Roboter
Einführung in die Robotik Vorlesung 5 27 November 2007 Dr. Mohamed Oubbati Institut für Neuroinformatik WS 2007/2008 Heutiges Thema: Aktoren Einführung Sensoren Mit Hilfe von Sensoren kann ein Roboter
Produktinnovationen für Elektrostapler
 Seite 1/5, 03. Februar 2015 Produktinnovationen für Elektrostapler Der Marktführer für Antriebslösungen für Elektro- Gegengewichtsstapler hat seine Produkte weiter optimiert. GP 15 GP 25 (Bild 2) In den
Seite 1/5, 03. Februar 2015 Produktinnovationen für Elektrostapler Der Marktführer für Antriebslösungen für Elektro- Gegengewichtsstapler hat seine Produkte weiter optimiert. GP 15 GP 25 (Bild 2) In den
Ford Transit (ab ) Bremse und Lenkung
 Bremse und Lenkung") Ford Transit (ab 04.2006) Bremse und Lenkung Reparaturarbeiten sollten nur von geschultem Fachpersonal durchgeführt werden. Bitte nutzen Sie bei allen Reparaturen die aufgeführten Spezialwerkzeuge Kopieren
Ford Transit (ab 04.2006) Bremse und Lenkung Reparaturarbeiten sollten nur von geschultem Fachpersonal durchgeführt werden. Bitte nutzen Sie bei allen Reparaturen die aufgeführten Spezialwerkzeuge Kopieren
Abschlussarbeit. Optimierung von automatisierten Wirkungsgradmessungen am Getriebeprüfstand
 Abschlussarbeit Optimierung von automatisierten Wirkungsgradmessungen am Getriebeprüfstand Sie analysieren Möglichkeiten hinsichtlich einer optimalen Automatisierung von Getriebe-Wirkungsgradmessungen
Abschlussarbeit Optimierung von automatisierten Wirkungsgradmessungen am Getriebeprüfstand Sie analysieren Möglichkeiten hinsichtlich einer optimalen Automatisierung von Getriebe-Wirkungsgradmessungen
Vortrag EAS 2007 Ausschnitt aus den Seminarunterlagen. Basiswissen über Fahrerassistenzsysteme V3.0
 Vortrag EAS 2007 Ausschnitt aus den Seminarunterlagen Basiswissen über Fahrerassistenzsysteme V3.0 Dr. Karl de Molina FTronik GmbH Dornach, Januar 2010 Seminar 2010: Basiswissen Fahrerassistenzsysteme
Vortrag EAS 2007 Ausschnitt aus den Seminarunterlagen Basiswissen über Fahrerassistenzsysteme V3.0 Dr. Karl de Molina FTronik GmbH Dornach, Januar 2010 Seminar 2010: Basiswissen Fahrerassistenzsysteme
Auf der sicheren Seite. Mit dem 2-Jahres-Wertpaket für Ihren Unimog.
 Auf der sicheren Seite. Mit dem 2-Jahres-Wertpaket für Ihren Unimog. Das Unimog 2-Jahres-Wertpaket Seit 01. 01. 2008 erhalten alle bei der österreichischen Vertriebsorgani sa tion gekauften Mercedes-Benz
Auf der sicheren Seite. Mit dem 2-Jahres-Wertpaket für Ihren Unimog. Das Unimog 2-Jahres-Wertpaket Seit 01. 01. 2008 erhalten alle bei der österreichischen Vertriebsorgani sa tion gekauften Mercedes-Benz
Rolf Isermann (Hrsg.) Fahrdynamik-Regelung. Modellbildung, Fahrerassistenzsysteme, Mechatronik. Mit 340 Abbildungen und 28 Tabellen.
 Fahrdynamik-Regelung. Modellbildung, Fahrerassistenzsysteme, Mechatronik. Mit 340 Abbildungen und 28 Tabellen.") Rolf Isermann (Hrsg.) Fahrdynamik-Regelung Modellbildung, Fahrerassistenzsysteme, Mechatronik Mit 340 Abbildungen und 28 Tabellen ATZ/MTZ-Fachbuch vieweg IX Inhaltsverzeichnis Das mechatronische Kraftfahrzeug
Rolf Isermann (Hrsg.) Fahrdynamik-Regelung Modellbildung, Fahrerassistenzsysteme, Mechatronik Mit 340 Abbildungen und 28 Tabellen ATZ/MTZ-Fachbuch vieweg IX Inhaltsverzeichnis Das mechatronische Kraftfahrzeug
Jetta. Antiblockiersystem (ABS), Antriebsschlupfregelung (ASR) Reifen-Kontroll-Anzeige ab Juli 2008, Hinweise: Стр. 1 из 7. Stromlaufplan Nr.
, Antriebsschlupfregelung (ASR) Reifen-Kontroll-Anzeige ab Juli 2008, Hinweise: Стр. 1 из 7. Stromlaufplan Nr.") Стр. 1 из 7 Stromlaufplan Nr. 219 / 1 Ausgabe 09.2008 Antiblockiersystem (ABS), Antriebsschlupfregelung (ASR) Reifen-Kontroll-Anzeige ab Juli 2008, Hinweise: Informationen über Relaisplatz- und Sicherungsbelegung
Стр. 1 из 7 Stromlaufplan Nr. 219 / 1 Ausgabe 09.2008 Antiblockiersystem (ABS), Antriebsschlupfregelung (ASR) Reifen-Kontroll-Anzeige ab Juli 2008, Hinweise: Informationen über Relaisplatz- und Sicherungsbelegung
Bachelorprüfung MM I 2. März Vorname: Name: Matrikelnummer:
 Institut für Mechatronische Systeme Prof. Dr.-Ing. S. Rinderknecht Erreichbare Punktzahl: 40 Bearbeitungszeit: 60 Min Prüfung Maschinenelemente & Mechatronik I 2. März 2010 Rechenteil Name: Matr. Nr.:......
Institut für Mechatronische Systeme Prof. Dr.-Ing. S. Rinderknecht Erreichbare Punktzahl: 40 Bearbeitungszeit: 60 Min Prüfung Maschinenelemente & Mechatronik I 2. März 2010 Rechenteil Name: Matr. Nr.:......
Nutzen und Wirkungsweise des Elektronischen Stabilitätsprogramms ESP
 BOSCH Nutzen und Wirkungsweise des Elektronischen Stabilitätsprogramms ESP 1 Inhalt Einleitung Physikalisches Konzept des ESP Komponenten des ESP-Systems Regelkonzept des ESP Ergebnisse Zusammenfassung
BOSCH Nutzen und Wirkungsweise des Elektronischen Stabilitätsprogramms ESP 1 Inhalt Einleitung Physikalisches Konzept des ESP Komponenten des ESP-Systems Regelkonzept des ESP Ergebnisse Zusammenfassung
Einführung Arduino - Aufbau
 Einführung Arduino Einführung Arduino - Aufbau Einführung Arduino - Breadboard (http://www.circuit-help.com.ph/wpcontent/uploads/2014/02/imgp5507-600x600.jpg) Einführung Arduino - Breadboard (https://images.duckduckgo.com/iu/?u=http%3a%2f
Einführung Arduino Einführung Arduino - Aufbau Einführung Arduino - Breadboard (http://www.circuit-help.com.ph/wpcontent/uploads/2014/02/imgp5507-600x600.jpg) Einführung Arduino - Breadboard (https://images.duckduckgo.com/iu/?u=http%3a%2f
Bremskraftverstärker. aktive Wankstabilisierung. Bremsassistent. Lenkassistent
 Bild 5.1_1 EHB Automatikgetriebe ASR sensorgesteuerter Scheibenwischer ABS ABC Servolenkung Bremskraftverstärker aktive Wankstabilisierung Bremsassistent Lenkassistent ACC Tempomat Navi ESP Fahrerassistenzsysteme
Bild 5.1_1 EHB Automatikgetriebe ASR sensorgesteuerter Scheibenwischer ABS ABC Servolenkung Bremskraftverstärker aktive Wankstabilisierung Bremsassistent Lenkassistent ACC Tempomat Navi ESP Fahrerassistenzsysteme
Einfluss Mechatronischer Systeme in der Fahrzeugtechnik am Beispiel eines Aktiven Fahrwerks
 Einfluss Mechatronischer Systeme in der Fahrzeugtechnik am Beispiel eines Aktiven Fahrwerks Dr. Dirk Nissing Leiter Vorentwicklung Fahrwerk Global R&D Steering & Suspension Tech Center Düsseldorf 05. April
Einfluss Mechatronischer Systeme in der Fahrzeugtechnik am Beispiel eines Aktiven Fahrwerks Dr. Dirk Nissing Leiter Vorentwicklung Fahrwerk Global R&D Steering & Suspension Tech Center Düsseldorf 05. April
Variable Lenkunterstützung für eine elektromechanische Servolenkung
 Variable Lenkunterstützung für eine elektromechanische Servolenkung O. Graßmann, H. Henrichfreise, Cologne Laboratory of Mechatronics (CLM), Fachhochschule Köln H. Niessen, K. v. Hammel, Mercedes-Benz
Variable Lenkunterstützung für eine elektromechanische Servolenkung O. Graßmann, H. Henrichfreise, Cologne Laboratory of Mechatronics (CLM), Fachhochschule Köln H. Niessen, K. v. Hammel, Mercedes-Benz
Automotive Mikrocontroller
 Automotive Mikrocontroller Ansteuerung ext. Lasten und Steller Dipl.-Ing. (FH) Oliver Kettenbaum Inhalt 1. Funktionsinhalte der ECU 2. Zustandsdefinitionen: Fehler- und Funktionszustände der ECU 3. Mikroprozessorübersicht
Automotive Mikrocontroller Ansteuerung ext. Lasten und Steller Dipl.-Ing. (FH) Oliver Kettenbaum Inhalt 1. Funktionsinhalte der ECU 2. Zustandsdefinitionen: Fehler- und Funktionszustände der ECU 3. Mikroprozessorübersicht
Grundstruktur mechatronischer Systeme
 Bild 2.1_1 Quelle: VDI Grundstruktur mechatronischer Systeme Bild 2.1_2 Grundstruktur mechatronischer Systeme am Beispiel ESP Bild 2.1_3 Quelle: VDI Arten von Flüssen innerhalb eines mechatronischen Systems
Bild 2.1_1 Quelle: VDI Grundstruktur mechatronischer Systeme Bild 2.1_2 Grundstruktur mechatronischer Systeme am Beispiel ESP Bild 2.1_3 Quelle: VDI Arten von Flüssen innerhalb eines mechatronischen Systems
TwinCAT Motion Designer Bericht. Projektname: TwinCAT Motion Designer Project7. Kunde. Applikationsingenieur. Projektbeschreibung
 TwinCAT Motion Designer Bericht Projektname: Kunde Firma: Name: Abteilung: Straße: Stadt: Land: Applikationsingenieur Firma: Name: Abteilung: Straße: Stadt: Land: Projektbeschreibung Selbstausschluss Die
TwinCAT Motion Designer Bericht Projektname: Kunde Firma: Name: Abteilung: Straße: Stadt: Land: Applikationsingenieur Firma: Name: Abteilung: Straße: Stadt: Land: Projektbeschreibung Selbstausschluss Die
Starter-Kits PKW und NKW
 Starter-Kits PKW und NKW ALLES FÜR IHRE WERKSTATT Für den täglichen Umgang mit Lenkungen und Lenkungsteilen brauchen Sie nicht nur Wissen und Erfahrung, sondern auch die richtigen Werkzeuge von Robert
Starter-Kits PKW und NKW ALLES FÜR IHRE WERKSTATT Für den täglichen Umgang mit Lenkungen und Lenkungsteilen brauchen Sie nicht nur Wissen und Erfahrung, sondern auch die richtigen Werkzeuge von Robert
Linearachssystemen. technische Vertriebsunterstützung
 Plug & Play mit einbaufertigen Linearachssystemen R i Reiner K öll Knöll technische Vertriebsunterstützung 1 Aktuelle und zukünftige Entwicklungen in der Hydraulik These: Die Erfüllung übergeordneter Trends
Plug & Play mit einbaufertigen Linearachssystemen R i Reiner K öll Knöll technische Vertriebsunterstützung 1 Aktuelle und zukünftige Entwicklungen in der Hydraulik These: Die Erfüllung übergeordneter Trends
Table of Contents. Table of Contents Kfz-Technik Sicherheit und Komfort Bremssysteme CarTrain Elektromechanische Feststellbremse
 Table of Contents Table of Contents Kfz-Technik Sicherheit und Komfort Bremssysteme CarTrain Elektromechanische Feststellbremse 1 2 2 3 4 4 Lucas Nülle GmbH Seite 1/8 https://www.lucas-nuelle.de Kfz-Technik
Table of Contents Table of Contents Kfz-Technik Sicherheit und Komfort Bremssysteme CarTrain Elektromechanische Feststellbremse 1 2 2 3 4 4 Lucas Nülle GmbH Seite 1/8 https://www.lucas-nuelle.de Kfz-Technik
Klassifizierung gemäß: 38 Straßenverkehrs-Zulassungs-Ordnung (StVZO)
") EPM 2016 Workshop: Lenken mit PSL Marcus Specks 1 HAWE Hydraulik SE 11.02.2016 1 Agenda Klassifizierung gemäß: 38 Straßenverkehrs-Zulassungs-Ordnung (StVZO) Allgemeine Begriffsbestimmung 2 HAWE Hydraulik
EPM 2016 Workshop: Lenken mit PSL Marcus Specks 1 HAWE Hydraulik SE 11.02.2016 1 Agenda Klassifizierung gemäß: 38 Straßenverkehrs-Zulassungs-Ordnung (StVZO) Allgemeine Begriffsbestimmung 2 HAWE Hydraulik
Land-Rover 1954 Umbau zum modernen Elektro-Nutzfahrzeug
 Land-Rover 1954 Umbau zum modernen Elektro-Nutzfahrzeug Fa. Bürker-Kunstform Tel.: 0171-6252953 E-Mail: info@buerker-kunstform.de 1 Warum? Weil es möglich ist Das Elektro-Auto ist die einfache Technik
Land-Rover 1954 Umbau zum modernen Elektro-Nutzfahrzeug Fa. Bürker-Kunstform Tel.: 0171-6252953 E-Mail: info@buerker-kunstform.de 1 Warum? Weil es möglich ist Das Elektro-Auto ist die einfache Technik
Elektrische Maschinen für Hybridantriebe
 ZF Friedrichshafen AG Ernst-Sachs-Straße 62 97424 Schweinfurt Deutschland Tel.: +49 9721 98-0 Fax: +49 9721 98-2290 www.zf.com Elektrische Maschinen für Hybridantriebe Für Personenkraftwagen und Nutzfahrzeuge
ZF Friedrichshafen AG Ernst-Sachs-Straße 62 97424 Schweinfurt Deutschland Tel.: +49 9721 98-0 Fax: +49 9721 98-2290 www.zf.com Elektrische Maschinen für Hybridantriebe Für Personenkraftwagen und Nutzfahrzeuge
The Brand in the Brand
 F o r B e t t e r D e c i s i o n s The Brand in the Brand - Potenziale für Ingredient Branding am Beispiel von Automobilzulieferern - Dr. Konrad Weßner puls Marktforschung GmbH Repräsentative puls-marktforschungsstudie
F o r B e t t e r D e c i s i o n s The Brand in the Brand - Potenziale für Ingredient Branding am Beispiel von Automobilzulieferern - Dr. Konrad Weßner puls Marktforschung GmbH Repräsentative puls-marktforschungsstudie
Daten & Fakten Facts & Figures 2011
 11 Daten & Fakten Facts & Figures 2011 Das Unternehmen About the Company Die Robert Bosch GmH und die ZF Friedrichshafen AG gründen am 1. Januar 1999 ein 50:50 Gemeinschaftsunternehmen, das sich auf die
11 Daten & Fakten Facts & Figures 2011 Das Unternehmen About the Company Die Robert Bosch GmH und die ZF Friedrichshafen AG gründen am 1. Januar 1999 ein 50:50 Gemeinschaftsunternehmen, das sich auf die
H1 die neue Generation hydrostatischer
 At the heart of tomorrow s mobile machinery H1 die neue Generation hydrostatischer Systeme QUALITÄT UND ZUVERLÄSSIGKEIT ALS KONSTRUKTIONSMAXIME VORTEILE BEI INTEGRATION UND INSTALLATION FÜR ELEKTRISCHE
At the heart of tomorrow s mobile machinery H1 die neue Generation hydrostatischer Systeme QUALITÄT UND ZUVERLÄSSIGKEIT ALS KONSTRUKTIONSMAXIME VORTEILE BEI INTEGRATION UND INSTALLATION FÜR ELEKTRISCHE
1.1.1 Aufgabe des Triebstrangs
 1.1.1 Aufgabe des Triebstrangs Der Triebstrang eines Automobils hat die Aufgabe, den Zug- und Schubkraftebedarf für die Fortbewegung sicherzustellen. Im Antriebsmotor wird chemische Energie (Kraftstoffe)
1.1.1 Aufgabe des Triebstrangs Der Triebstrang eines Automobils hat die Aufgabe, den Zug- und Schubkraftebedarf für die Fortbewegung sicherzustellen. Im Antriebsmotor wird chemische Energie (Kraftstoffe)
Peter Pfeffer Manfred Harrer (Hrsg.) Lenkungshandbuch
 Lenkungshandbuch") Peter Pfeffer Manfred Harrer (Hrsg.) Lenkungshandbuch Aus dem Programm Kraftfahrzeugtechnik Handbuch Verbrennungsmotor herausgegeben von R. van Basshuysen und F. Schäfer Vieweg Handbuch Kraftfahrzeugtechnik
Peter Pfeffer Manfred Harrer (Hrsg.) Lenkungshandbuch Aus dem Programm Kraftfahrzeugtechnik Handbuch Verbrennungsmotor herausgegeben von R. van Basshuysen und F. Schäfer Vieweg Handbuch Kraftfahrzeugtechnik
DREHZAHLREGLER UND MOTION CONTROLLER. Ihr Partner für maßgeschneiderte Antriebslösungen.
 DREHZAHLREGLER UND MOTION CONTROLLER www.elra.at Übersicht Drehzahlregler und Motion Controller Drehzahlregler & Motion Controller Type Dauerstrom (bei 24VDC) Spitzenstrom (bei 24VDC) mcdsa-e65 5A 15A
DREHZAHLREGLER UND MOTION CONTROLLER www.elra.at Übersicht Drehzahlregler und Motion Controller Drehzahlregler & Motion Controller Type Dauerstrom (bei 24VDC) Spitzenstrom (bei 24VDC) mcdsa-e65 5A 15A
Modellbasierte Validierung von mobilen Arbeitsmaschinen im virtuellen Fahrversuch
 Taking you to the next level Modellbasierte Validierung von mobilen Arbeitsmaschinen im virtuellen Fahrversuch Dr.-Ing. Christian Schyr, IPG Automotive GmbH, Karlsruhe Dipl.-Ing. Frank Otto, Karlsruher
Taking you to the next level Modellbasierte Validierung von mobilen Arbeitsmaschinen im virtuellen Fahrversuch Dr.-Ing. Christian Schyr, IPG Automotive GmbH, Karlsruhe Dipl.-Ing. Frank Otto, Karlsruher
Master Automotive Systems
 Master Automotive Systems Prof. Dr.-Ing. Clemens Gühmann Technische Universität Berlin School IV Electrical Engineering and Computer Science Departement of Energy and Automation Technology Überblick Motivation
Master Automotive Systems Prof. Dr.-Ing. Clemens Gühmann Technische Universität Berlin School IV Electrical Engineering and Computer Science Departement of Energy and Automation Technology Überblick Motivation
Neues Redundanzkonzept für elektrische Antriebssysteme Adaption für sicherheitsrelevante KFZ-Systeme
 Neues Redundanzkonzept für elektrische Antriebssysteme Adaption für sicherheitsrelevante KFZ-Systeme Inhalt 1. Risiko und Risikobeurteilung 2. Möglichkeiten zur Risikominimierung 3. Sicherheitsrelevante
Neues Redundanzkonzept für elektrische Antriebssysteme Adaption für sicherheitsrelevante KFZ-Systeme Inhalt 1. Risiko und Risikobeurteilung 2. Möglichkeiten zur Risikominimierung 3. Sicherheitsrelevante
Vortrag: Carsten Hansen Tobias Krull
 Vortrag: Carsten Hansen Tobias Krull Einführung Hybrid System Komponenten Verbrennungsmotor System Control Zusammenfassung Suche nach einem effizienteren Antriebssystemen Verschiedene Technologien stehen
Vortrag: Carsten Hansen Tobias Krull Einführung Hybrid System Komponenten Verbrennungsmotor System Control Zusammenfassung Suche nach einem effizienteren Antriebssystemen Verschiedene Technologien stehen
Serie 5 TTV 5100 TTV 5110 TTV 5120 TTV 5130 TTV. deutz-fahr.com
 Serie 5 TTV 5100 TTV 5110 TTV 5120 TTV 5130 TTV Serie 5 TTV - Übersicht Modell Homologierte Leistung (ECE R 120) Höchstleistung (ECE R-120) Motor Tier 4i 5100 TTV 70 kw / 95 PS 73kW / 99PS 5110 TTV 77
Serie 5 TTV 5100 TTV 5110 TTV 5120 TTV 5130 TTV Serie 5 TTV - Übersicht Modell Homologierte Leistung (ECE R 120) Höchstleistung (ECE R-120) Motor Tier 4i 5100 TTV 70 kw / 95 PS 73kW / 99PS 5110 TTV 77
Die komplexe Technik heutiger Kraftfahrzeuge und Motoren macht einen immer größer werdenden Fundus an Informationen notwendig, um die Funktion und
 ATZ/MTZ-Fachbuch Die komplexe Technik heutiger Kraftfahrzeuge und Motoren macht einen immer größer werdenden Fundus an Informationen notwendig, um die Funktion und die Arbeitsweise von Komponenten oder
ATZ/MTZ-Fachbuch Die komplexe Technik heutiger Kraftfahrzeuge und Motoren macht einen immer größer werdenden Fundus an Informationen notwendig, um die Funktion und die Arbeitsweise von Komponenten oder
Komfort. Performance. Strategische Zielsetzung der Porsche Fahrwerk-Entwicklung. 718 Boxster. 718 Boxster. The breathtaking future of car.
 Fahrwerk Strategische Zielsetzung der Porsche Fahrwerk-Entwicklung Komfort Porsche 718 Boxster PASM 718 Boxster PASM Sportfahrwerk Performance: Porsche bietet in jedem Segment das sportlichste Angebot
Fahrwerk Strategische Zielsetzung der Porsche Fahrwerk-Entwicklung Komfort Porsche 718 Boxster PASM 718 Boxster PASM Sportfahrwerk Performance: Porsche bietet in jedem Segment das sportlichste Angebot
E-Motorsimulation. Basierend auf FPGA-Technologie Franz Dengler/Georg Selzle, MicroNova. 8. Technologietag Automotive
 E-Motorsimulation Basierend auf FPGA-Technologie Franz Dengler/Georg Selzle, MicroNova Überblick Warum Elektrofahrzeuge Komponenten eines Elektrofahrzeugs Testalternativen für Steuergeräte für Elektromotoren
E-Motorsimulation Basierend auf FPGA-Technologie Franz Dengler/Georg Selzle, MicroNova Überblick Warum Elektrofahrzeuge Komponenten eines Elektrofahrzeugs Testalternativen für Steuergeräte für Elektromotoren
1 Daten und Fakten des ZF-Konzerns, Kurzprofil - 2014, Öffentlich. ZF Friedrichshafen AG, 2015
 Daten und Fakten des ZF-Konzerns, Kurzprofil - 2014 ZF Friedrichshafen AG 1 Daten und Fakten des ZF-Konzerns, Kurzprofil - 2014, Öffentlich Vorstand Dr. Stefan Sommer Vorsitzender des Vorstands Dr. Konstantin
Daten und Fakten des ZF-Konzerns, Kurzprofil - 2014 ZF Friedrichshafen AG 1 Daten und Fakten des ZF-Konzerns, Kurzprofil - 2014, Öffentlich Vorstand Dr. Stefan Sommer Vorsitzender des Vorstands Dr. Konstantin
Audi A6 Stromlaufplan Nr. 51 / 1
 Audi A6 Stromlaufplan Nr. 51 / 1 Antiblockiersystem 5.3 (ABS) mit Elektronischem Stabilitätsprogramm (ESP, Fahrdynamikregelung), Allroad ab Modelljahr 2002 Sicherungshalter Sicherungen im Sicherungshalter
Audi A6 Stromlaufplan Nr. 51 / 1 Antiblockiersystem 5.3 (ABS) mit Elektronischem Stabilitätsprogramm (ESP, Fahrdynamikregelung), Allroad ab Modelljahr 2002 Sicherungshalter Sicherungen im Sicherungshalter
Verfügbare Arbeitspakete:
 Verfügbare Arbeitspakete: Teamleiter AP1: Führung, Organisation und Koordination des THM Motorsport Teams Koordination aller Baugruppen mit dem jeweiligen Gruppenleiter Verantwortlich für die Koordination
Verfügbare Arbeitspakete: Teamleiter AP1: Führung, Organisation und Koordination des THM Motorsport Teams Koordination aller Baugruppen mit dem jeweiligen Gruppenleiter Verantwortlich für die Koordination