Vorlesung 3. Struktur Ofensystem
|
|
|
- Hanna Stein
- vor 6 Jahren
- Abrufe
Transkript
1 Regelkreisglieder Struktur Ofensystem Das Ofensystem besteht aus einzelnen Übertragungsgliedern, allgemein als Regelkreisglieder bezeichnet Es gibt für Regelkreisglieder die Unterscheidung linear/nichtlinear und statisch/dynamisch 1
2 hier lineare Regelkreisglieder: Schraube: Hebel: Verstärker: Ofen: W = k *ϕ S = K S K * W 2 2 * U 4 * 2 = K S dt + ϑ = K 5 m T ϑ * Merkmal: Linearität zwischen Eingang und Ausgang (Xa=k*Xe) 2

3 Schraube: linear zwischen Drehwinkel und Hub W = k * ϕ WINFACT 3
4 Hydraulischer Verstärker: Vorlesung 3 linear zwischen S2 und Hubgeschwindigkeit U = K 4 * S2dt WINFACT 4
5 Ofen: Vorlesung 3 linear zwischen Massenstrom und Temperatur, aber verzögert T ϑ ϑ = K 5 * + m 5
6 6 0 ) ( ϑ ϑ ϑ ϑ ϑ ϑ ρ ϑ ϑ ϑ ρ + = + => + = + => = K m T m k c k c V k m c c V umg b p umg b p ϑ, V Ofen: linear zwischen Brennstoffmenge und Temperatur Vorlesung 3 ) ( umg k ϑ ϑ m c b
7 Nichtlineare Regelkreisglieder Ventil: m = K * P + e f ( U ) Thermometer: P = f (ϑ) Federbalg: S 1 = f ( P) Merkmal: nichtlineare Funktion zwischen Eingang und Ausgang 7
 1 P")
8 Federbalg: krumme Kennlinie S = f ( ) 1 P WINFACT 8
9 Aufteilung des Gesamten in statische / dynamische Komponenten: Statische Komponenten: Schraube Balg Hebel Ventil Keine Zeitunterschiede in der Reaktion Dynamische Komponenten: Ofen Verstärker Verzögerung oder proportionale Geschwindigkeit oder Differentialstoß 9
10 Wenn das System nichtlinear und dynamisch ist, werden die Komponenten getrennt: Ein statischer Modellteil Aus Gesamtsystem dynamischer Modellteil Aus 2. Zustand B 1. Zustand A Zuordnung Ein/Aus ohne Zeiteinfluss (kann in Wirklichkeit schnell oder langsam sein) Ein 10

11 Statische Beschreibung des Verbrennungsmotor im Kennfeld Drehmoment Gasl rein statisch! WINFACT Drehzahl 11

12 Statische + dynamische Beschreibung des Verbrennungsmotorkennfeld Drehmoment Gas dynamisch! (nur Kurbelwelle) Drehzahl WINFACT 12

13 Drehmoment Vorlesung 3 Statische + dynamische Beschreibung des Verbrennungsmotorkennfeld Gas dynamisch! (ganzes Auto) Drehzahl WINFACT 13
14 Erklärung Dynamisch : Funktionsweise der Differentialgleichung 1.2 m, T, dt/dt Tangente: ϑ( t 0 ) 1.0 T m K P K P ϑ = T m t in sec Für t 0 =2sec gilt: T ϑ ( t) + ϑ ( t) = K m( t) + = K P m T ϑ ( t 0 ) 0 P * => T=0.6sec 14
 +ϑ( t) = K")
15 Zur Funktionsweise der Differentialgleichung T ϑ( t) +ϑ( t) = K P m( t) WINFACT 15

16 Identifikation der DGL: System Ofen Textuell: Ofensystem Beschreibung der Dynamik Regelungstechnische Begriffe: Verstärkung Kp und PT1-Glied mit T=0.6 sec DGL: T ϑ( t) +ϑ( t) = K P m( t) als Sprungantwort als Frequenzgang als Übertragungsfunktion 16
17 Normierte Darstellung für mathematische Behandlung: Einheitssprung Übergangsantwort 17
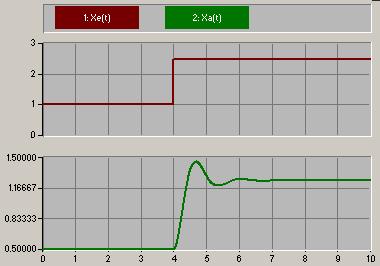
18 reale Darstellung für Labormessung: Sprungfunktion X e (t)= X e *σ(t) Sprungantwort X a (t) WINFACT 18
19 Klassifizierung von linearen Regelkreisgliedern mit der Übergangsantwort / Sprungantwort Regelkreisglied-Name DGL + Parameter Übergangsantwort (normierte Form) Beispielzeitverläufe in Winfact (rot: Eingangssignal Xe, grün: Ausgangssignal Xa) WINFACT 19


20 Lineares Regelkreisglied: P-Glied 20
21 Beispiel P-Glied Hebel Spannungsteiler b s = * a a s e R u = * 2 a u e R1 + R2 21
22 Beispiel P-Glied Füllstandsregelung mit P-Regler y = K pr ( w0 x) 22


23 Lineares Regelkreisglied: PT1-Glied 23
24 Beispiel PT1-Glied Tiefpass T = R C dua ( t) T1 + ua ( t) = ue( t) dt T = 1 1 R L 24
25 Beispiel PT1-Glied Gleichstrommotor dn( t) TM + n( t) = dt K S * u A ( t) 25
26 Beispiel PT1-Glied Feder Dämpfer System dsa( t) rk + c f sa ( t) = c dt f * s e ( t) Zeitkonstante? Verstärkung? 26
27 Beispiel PT1-Glied Wärmeübergang: Thermosystem c m W dϑa ( t) dt + ϑ ( t) = ϑ ( t) a e 27
28 Beispiel PT1-Glied Wärmeübergang: Druckspeicher V W dpa ( t) + pa ( t) = R ϑ dt p ( t) e 28

29 Lineares Regelkreisglied: PT2-Glied 29


30 Lineares Regelkreisglied: PT2-Glied 30
31 Beispiel PT2-Glied Feder Masse Dämpfer m d x ( t) dx ( t) a a + r c x ( t) 2 k + f a dt dt = 2 x e ( t) Zeitkonstante? Verstärkung? 31
32 32 Vorlesung 3 Beispiel PT2-Glied Druckspeichersystem ) ( ) ( ) ( ) ( ) ( t y t x dt t dx C W C W C W dt t x d C W C W v v v v v = W i : Strömungswiderstand; C v1 : Speicherkapazität


33 Lineares Regelkreisglied: DT1-Glied 33
34 Beispiel DT1-Glied Dämpfer Feder System r k ds t) dt ds ( t) dt 2 ( 1 + c f s2( t) = rk * 34


35 Lineares Regelkreisglied: I-Glied. 35
36 Beispiel I-Glied Behälter System x( t) = K IS y ( t) dt; K IS = 1 A 36


37 Lineares Regelkreisglied: PD1-Glied 37
38 Beispiel PD1-Glied Vorlesung 3 Füllstandsregelung mit PDT1-Regler Regeldifferenz: x d = ( w0 x) Reglergleichung: c f 1 rk + c f 2 dy( t) dt + y( t) = c f 1 rk + c f 2 a b dxd ( t) dt + c f 1 c f 1 + c f 2 a b x d ( t) 38

39 Lineares Regelkreisglied: PD2-Glied 39
")

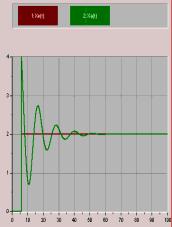
40 Beispiel PD2-Glied Schwingungskompensierendes Korrekturglied im Prozeßregler d xa ( t) dxa ( t) d xe( t) = 4 2 dt dt dt 2 D = 0.8, T = 2sec D = 0.3; dxe( t) dt T = 2sec

41 Schwingungskompensierendes Korrekturglied im Prozeßregler Vorlesung 3 Beispiel PD2-Glied Ausschlag PD2-Glied PT2-Übergang Korrigierter Übergang WINFACT 41


42 Lineares Regelkreisglied: IT1-Glied 42
43 Beispiel IT1-Glied Werkzeugmaschine T M s( t) = dn( t) + n( t) = K dt h sp n ( t) dt PS u A ( t) 43
Vorlesung 6. Übertragungsfunktion der linearen Regelkreisglieder Textuell: FederPendel. DGL: als Sprungantwort
 Textuell: FederPendel yste FederPendel Dreh- Magnet Feder c Masse l Däpfer d lf ld ollwertgeber Regler Winkelsensor Regelungstechnische Begriffe: PT-Glied it Verstärkung Kp, Däpfung D, Zeitkonstante T
Textuell: FederPendel yste FederPendel Dreh- Magnet Feder c Masse l Däpfer d lf ld ollwertgeber Regler Winkelsensor Regelungstechnische Begriffe: PT-Glied it Verstärkung Kp, Däpfung D, Zeitkonstante T
Linearisierung. Vorlesung 4. Realität: nichtlinear. Wunsch: Vorteil: Anwendung einfacher Rechenmethoden (lineare DGL, lineare Gleichung) A=F(Y)
 A=F(Y)") Realität: nichtlinear Y AF(Y) A Wunsch: im Betriebspunkt linear Y K A Vorteil: Anwendung einfacher Rechenmethoden (lineare DGL, lineare Gleichung) 1 Beispiel für Nichtlineare Systemkomponente: Ventil in
Realität: nichtlinear Y AF(Y) A Wunsch: im Betriebspunkt linear Y K A Vorteil: Anwendung einfacher Rechenmethoden (lineare DGL, lineare Gleichung) 1 Beispiel für Nichtlineare Systemkomponente: Ventil in
G R. Vorlesung 9. Identifiziert durch Sprungantwort. Sinnvoll selbst gestalten. Regler. Einschleifiger Regelkreis: Xd(s) W(s) Y(s) U(s) GFeder S
 W(s) Y(s) U(s) GFeder S") Einschleifiger Regelkreis: Identifiziert durch prungantwort W(s) - Xd(s) G R? U(s) trecke GFeder Dreh- Magnet c Masse m lm Dämpfer d lf ld ollwertgeber Winkelsensor Y(s) innvoll selbst gestalten 1 typen:
Einschleifiger Regelkreis: Identifiziert durch prungantwort W(s) - Xd(s) G R? U(s) trecke GFeder Dreh- Magnet c Masse m lm Dämpfer d lf ld ollwertgeber Winkelsensor Y(s) innvoll selbst gestalten 1 typen:
Übungsaufgaben zur Vorlesung Regelungssysteme (Grundlagen)
") Übungsaufgaben zur Vorlesung Regelungssysteme (Grundlagen) TU Bergakademie Freiberg Institut für Automatisierungstechnik Prof. Dr.-Ing. Andreas Rehkopf 27. Januar 2014 Übung 1 - Vorbereitung zum Praktikum
Übungsaufgaben zur Vorlesung Regelungssysteme (Grundlagen) TU Bergakademie Freiberg Institut für Automatisierungstechnik Prof. Dr.-Ing. Andreas Rehkopf 27. Januar 2014 Übung 1 - Vorbereitung zum Praktikum
Einführung in die Regelungstechnik
 Einführung in die Regelungstechnik WS-Vorlesung SRT Mechatronik 2007 TEIL REGELUNG Prof. Datum Termin Veranstaltung Doppelstunde Teil1 Doppelstunde Teil2 Folien 1 Sa 01.09.2007 8:30 11:45 V1 V Einführung
Einführung in die Regelungstechnik WS-Vorlesung SRT Mechatronik 2007 TEIL REGELUNG Prof. Datum Termin Veranstaltung Doppelstunde Teil1 Doppelstunde Teil2 Folien 1 Sa 01.09.2007 8:30 11:45 V1 V Einführung
Regelungstechnik I. Heinz JUnbehauen. Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme. 3., durchgesehene Auflage
 Heinz JUnbehauen Regelungstechnik I Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme 3., durchgesehene Auflage Mit 192 Bildern V] Friedr. Vieweg & Sohn Braunschweig/Wiesbaden
Heinz JUnbehauen Regelungstechnik I Klassische Verfahren zur Analyse und Synthese linearer kontinuierlicher Regelsysteme 3., durchgesehene Auflage Mit 192 Bildern V] Friedr. Vieweg & Sohn Braunschweig/Wiesbaden
Automatisierungstechnik 1
 Automatisierungstechnik Hinweise zum Laborversuch Motor-Generator. Modellierung U a R Last Gleichstrommotor Gleichstromgenerator R L R L M M G G I U a U em = U eg = U G R Last Abbildung : Motor-Generator
Automatisierungstechnik Hinweise zum Laborversuch Motor-Generator. Modellierung U a R Last Gleichstrommotor Gleichstromgenerator R L R L M M G G I U a U em = U eg = U G R Last Abbildung : Motor-Generator
G R G S. Vorlesung 11. Xd(s) W(s) Y(s) Reglerentwurfsverfahren. Zur Auswahl von Reglertyp und Reglerparameter. Typ? Parameter?
 W(s) Y(s) Reglerentwurfsverfahren. Zur Auswahl von Reglertyp und Reglerparameter. Typ? Parameter?") Zur Auswahl von Reglertyp und Reglerparameter W(s) - Xd(s) Regler G R trecke G Y(s) Typ? Parameter? 1 1. Typauswahl (P, PI, PD, PID???? ) A) nach Tabellen (Faustformel mit welcher Reglertyp zu welcher
Zur Auswahl von Reglertyp und Reglerparameter W(s) - Xd(s) Regler G R trecke G Y(s) Typ? Parameter? 1 1. Typauswahl (P, PI, PD, PID???? ) A) nach Tabellen (Faustformel mit welcher Reglertyp zu welcher
Regelungstechnik Aufgaben
 Serge Zacher Regelungstechnik Aufgaben Lineare, Zweipunkt- und digitale Regelung 2., überarbeitete und erweiterte Auflage Mit 126 Aufgaben und MATLAB-Simulationen ZACHE VII Inhalt 1. Formelsammlung 1 1.1
Serge Zacher Regelungstechnik Aufgaben Lineare, Zweipunkt- und digitale Regelung 2., überarbeitete und erweiterte Auflage Mit 126 Aufgaben und MATLAB-Simulationen ZACHE VII Inhalt 1. Formelsammlung 1 1.1
Grundkurs der Regelungstechnik
 Grundkurs der Regelungstechnik Einführung in die praktischen und theoretischen Methoden von Dr.-Ing. Ludwig Merz em. o. Professor und Direktor des Instituts für Meßund Regelungstechnik der Technischen
Grundkurs der Regelungstechnik Einführung in die praktischen und theoretischen Methoden von Dr.-Ing. Ludwig Merz em. o. Professor und Direktor des Instituts für Meßund Regelungstechnik der Technischen
Vorlesung 13. Die Frequenzkennlinien / Frequenzgang
 Vorlesung 3 Die Frequenzkennlinien / Frequenzgang Frequenzkennlinien geben das Antwortverhalten eines linearen Systems auf eine harmonische (sinusförmige) Anregung in Verstärkung (Amplitude) und Phasenverschiebung
Vorlesung 3 Die Frequenzkennlinien / Frequenzgang Frequenzkennlinien geben das Antwortverhalten eines linearen Systems auf eine harmonische (sinusförmige) Anregung in Verstärkung (Amplitude) und Phasenverschiebung
Regelung. Roddeck, W.: Einführung in die Mechatronik; Teubner Verlag, 2. Auflage, 2003, Kapitel 7
 Regelung Die Regelung ist ein Vorgang, bei dem der vorgegebene Wert einer Größe fortlaufend durch Eingriff aufgrund von Messungen dieser Größe hergestellt und aufrechterhalten wird. Hierdurch entsteht
Regelung Die Regelung ist ein Vorgang, bei dem der vorgegebene Wert einer Größe fortlaufend durch Eingriff aufgrund von Messungen dieser Größe hergestellt und aufrechterhalten wird. Hierdurch entsteht
Grundlagen der Regelungstechnik I (Prof. Dr.-Ing. habil. Jörg Grabow Fachgebiet Mechatronik FH Jena
 Grundlagen der Regelungstechnik I (Prof. Dr.-Ing. habil. Jörg Grabow Fachgebiet Mechatronik 1. Einführung in die Regelungstechnik 1.1 Zielsetzung der Regelungstechnik und Begriffsdefinitionen 1.2 Beispiele
Grundlagen der Regelungstechnik I (Prof. Dr.-Ing. habil. Jörg Grabow Fachgebiet Mechatronik 1. Einführung in die Regelungstechnik 1.1 Zielsetzung der Regelungstechnik und Begriffsdefinitionen 1.2 Beispiele
LTAM FELJC jean-claude.feltes@education.lu 1 T2EE. Regelungstechnik ASSERVISSEMENTS
 LTAM FELJC jean-claude.feltes@education.lu 1 T2EE Regelungstechnik ASSERVISSEMENTS Z W E R Y S X LTAM FELJC jean-claude.feltes@education.lu 2 1. Grundlagen 1.1. Steuerung Beispiel 1: Drehzahlsteuerung
LTAM FELJC jean-claude.feltes@education.lu 1 T2EE Regelungstechnik ASSERVISSEMENTS Z W E R Y S X LTAM FELJC jean-claude.feltes@education.lu 2 1. Grundlagen 1.1. Steuerung Beispiel 1: Drehzahlsteuerung
Regelung. Max Meiswinkel. 8. Dezember Max Meiswinkel () Regelung 8. Dezember / 12
 Regelung 8. Dezember / 12") Regelung Max Meiswinkel 8. Dezember 2008 Max Meiswinkel () Regelung 8. Dezember 2008 1 / 12 Übersicht 1 Einführung Der Regelkreis Regelschleife 2 stetige Regelung P-Regler I-Regler PI-Regler PD-Regler
Regelung Max Meiswinkel 8. Dezember 2008 Max Meiswinkel () Regelung 8. Dezember 2008 1 / 12 Übersicht 1 Einführung Der Regelkreis Regelschleife 2 stetige Regelung P-Regler I-Regler PI-Regler PD-Regler
Ergänzung zur Regelungstechnik
 Ergänzung zur Regelungstechnik mathematische Erfassung Weil die einzelnen Regelkreisglieder beim Signaldurchlauf ein Zeitverhalten haben, muss der Regler den Wert der Regelabweichung verstärken und gleichzeitig
Ergänzung zur Regelungstechnik mathematische Erfassung Weil die einzelnen Regelkreisglieder beim Signaldurchlauf ein Zeitverhalten haben, muss der Regler den Wert der Regelabweichung verstärken und gleichzeitig
Umdruck RT: Grundlagen der Regelungstechnik. 1 Grundbegriffe der Steuerungs- und Regelungstechnik. 1.2 Regelung
 Universität Stuttgart Institut für Leistungselektronik und lektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow.2 Regelung ÜBUG ZU LKRISCH RGICHIK II Umdruck R: Grundlagen der Regelungstechnik Grundbegriffe
Universität Stuttgart Institut für Leistungselektronik und lektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow.2 Regelung ÜBUG ZU LKRISCH RGICHIK II Umdruck R: Grundlagen der Regelungstechnik Grundbegriffe
Mechatronik Grundlagen
 Prüfung WS 2009/2010 Mechatronik Grundlagen Prof. Dr.-Ing. K. Wöllhaf Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit lesbarem Namen werden korrigiert. Keine rote Farbe verwenden.
Prüfung WS 2009/2010 Mechatronik Grundlagen Prof. Dr.-Ing. K. Wöllhaf Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit lesbarem Namen werden korrigiert. Keine rote Farbe verwenden.
Labor RT Versuch RT1-1. Versuchsvorbereitung. Prof. Dr.-Ing. Gernot Freitag. FB: EuI, FH Darmstadt. Darmstadt, den
 Labor RT Versuch RT- Versuchsvorbereitung FB: EuI, Darmstadt, den 4.4.5 Elektrotechnik und Informationstechnik Rev., 4.4.5 Zu 4.Versuchvorbereitung 4. a.) Zeichnen des Bode-Diagramms und der Ortskurve
Labor RT Versuch RT- Versuchsvorbereitung FB: EuI, Darmstadt, den 4.4.5 Elektrotechnik und Informationstechnik Rev., 4.4.5 Zu 4.Versuchvorbereitung 4. a.) Zeichnen des Bode-Diagramms und der Ortskurve
Einführung in die Regelungstechnik
 Einführung in die Regelungstechnik Heinz Mann, Horst Schiffelgen, Rainer Froriep Analoge und digitale Regelung, Fuzzy-Regler, Regel- Realisierung, Software ISBN 3-446-40303-5 Inhaltsverzeichnis Weitere
Einführung in die Regelungstechnik Heinz Mann, Horst Schiffelgen, Rainer Froriep Analoge und digitale Regelung, Fuzzy-Regler, Regel- Realisierung, Software ISBN 3-446-40303-5 Inhaltsverzeichnis Weitere
Die Beschreibung von Signalen und Systemen kann in verschiedenen Bereichen erfolgen:
 1 Grundlegende Begriffe 1.1 Signale und Systeme ein Signal: ein System: ist ein Satz von Daten setzt Signale in Beziehung Darstellung: Die Beschreibung von Signalen und Systemen kann in verschiedenen Bereichen
1 Grundlegende Begriffe 1.1 Signale und Systeme ein Signal: ein System: ist ein Satz von Daten setzt Signale in Beziehung Darstellung: Die Beschreibung von Signalen und Systemen kann in verschiedenen Bereichen
Die regelungstechnischen Grundfunktionen P, I, D, Totzeit und PT1. 1. Methoden zur Untersuchung von Regelstrecken
 FELJC P_I_D_Tt.odt 1 Die regelungstechnischen Grundfunktionen P, I, D, Totzeit und PT1 (Zum Teil Wiederholung, siehe Kurs T2EE) 1. Methoden zur Untersuchung von Regelstrecken Bei der Untersuchung einer
FELJC P_I_D_Tt.odt 1 Die regelungstechnischen Grundfunktionen P, I, D, Totzeit und PT1 (Zum Teil Wiederholung, siehe Kurs T2EE) 1. Methoden zur Untersuchung von Regelstrecken Bei der Untersuchung einer
Seminarübungen: Dozent: PD Dr. Gunther Reißig Ort: 33/1201 Zeit: Mo Uhr (Beginn )
") Vorlesung : Dozent: Professor Ferdinand Svaricek Ort: 33/040 Zeit: Do 5.00 6.30Uhr Seminarübungen: Dozent: PD Dr. Gunther Reißig Ort: 33/20 Zeit: Mo 5.00 6.30 Uhr (Beginn 8.0.206 Vorlesungsskript: https://www.unibw.de/lrt5/institut/lehre/vorlesung/rt_skript.pdf
Vorlesung : Dozent: Professor Ferdinand Svaricek Ort: 33/040 Zeit: Do 5.00 6.30Uhr Seminarübungen: Dozent: PD Dr. Gunther Reißig Ort: 33/20 Zeit: Mo 5.00 6.30 Uhr (Beginn 8.0.206 Vorlesungsskript: https://www.unibw.de/lrt5/institut/lehre/vorlesung/rt_skript.pdf
Einführung in die Regelungstechnik
 Heinz Mann t Horst Schiffeigen t Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 10., neu bearbeitete Auflage mit 379 Bildern
Heinz Mann t Horst Schiffeigen t Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 10., neu bearbeitete Auflage mit 379 Bildern
Einführung in die Regelungstechnik
 Heinz Mann f Horst Schiffelgen f Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 10., neu bearbeitete Auflage mit 379 Bildern
Heinz Mann f Horst Schiffelgen f Rainer Froriep Einführung in die Regelungstechnik Analoge und digitale Regelung, Fuzzy-Regler, Regler-Realisierung, Software 10., neu bearbeitete Auflage mit 379 Bildern
Optimierung von Regelkreisen. mit P-, PI und PID Reglern
 mit P-, PI und PID Reglern Sollwert + - Regler System Istwert Infos: Skript Regelungstechnisches Praktikum (Versuch 2) + Literatur Seite 1 Ziegler und Nichols Strecke: Annäherung durch Totzeit- und PT1-Glied
mit P-, PI und PID Reglern Sollwert + - Regler System Istwert Infos: Skript Regelungstechnisches Praktikum (Versuch 2) + Literatur Seite 1 Ziegler und Nichols Strecke: Annäherung durch Totzeit- und PT1-Glied
Ersatzschaltbild eines Operationsverstärkers für den Betrieb bei niederen Frequenzen
 Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow Ersatzschaltbild eines Operationsverstärkers für den Betrieb bei niederen Frequenzen Unterlagen zur Vorlesung Regelungstechnik
Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow Ersatzschaltbild eines Operationsverstärkers für den Betrieb bei niederen Frequenzen Unterlagen zur Vorlesung Regelungstechnik
Reglerentwurf mit dem Frequenzkennlinienverfahren
 Kapitel 5 Reglerentwurf mit dem Frequenzkennlinienverfahren 5. Synthese von Regelkreisen Für viele Anwendungen genügt es, Standard Regler einzusetzen und deren Parameter nach Einstellregeln zu bestimmen.
Kapitel 5 Reglerentwurf mit dem Frequenzkennlinienverfahren 5. Synthese von Regelkreisen Für viele Anwendungen genügt es, Standard Regler einzusetzen und deren Parameter nach Einstellregeln zu bestimmen.
Einstieg in die Regelungstechnik
 Hans-Werner Philippsen Einstieg in die Regelungstechnik Vorgehensmodell für den praktischen Reglerentwurf mit 263 Bildern und 17 Tabellen Fachbuchverlag Leipzig im Carl Hanser Verlag 1 Einführung 13 1.1
Hans-Werner Philippsen Einstieg in die Regelungstechnik Vorgehensmodell für den praktischen Reglerentwurf mit 263 Bildern und 17 Tabellen Fachbuchverlag Leipzig im Carl Hanser Verlag 1 Einführung 13 1.1
UNIVERSITÄT DUISBURG - ESSEN Fakultät für Ingenieurwissenschaften, Abt. Maschinenbau, Professur für Steuerung, Regelung und Systemdynamik
 Regelungstechnik I (PO95), Regelungstechnik (PO02 Schiffstechnik), Regelungstechnik (Bachelor Wi.-Ing.) (180 Minuten) Seite 1 NAME VORNAME MATRIKEL-NR. Aufgabe 1 (je 2 Punkte) a) Erläutern Sie anhand eines
Regelungstechnik I (PO95), Regelungstechnik (PO02 Schiffstechnik), Regelungstechnik (Bachelor Wi.-Ing.) (180 Minuten) Seite 1 NAME VORNAME MATRIKEL-NR. Aufgabe 1 (je 2 Punkte) a) Erläutern Sie anhand eines
(s + 3) 1.5. w(t) = σ(t) W (s) = 1 s. G 1 (s)g 2 (s) 1 + G 1 (s)g 2 (s)g 3 (s)g 4 (s) = Y (s) Y (s) W (s)g 1 (s) Y (s)g 1 (s)g 3 (s)g 4 (s)
 1.5. w(t) = σ(t) W (s) = 1 s. G 1 (s)g 2 (s) 1 + G 1 (s)g 2 (s)g 3 (s)g 4 (s) = Y (s) Y (s) W (s)g 1 (s) Y (s)g 1 (s)g 3 (s)g 4 (s)") Aufgabe : LAPLACE-Transformation Die Laplace-Transformierte der Sprungantwort ist: Y (s) = 0.5 s + (s + 3).5 (s + 4) Die Sprungantwort ist die Reaktion auf den Einheitssprung: w(t) = σ(t) W (s) = s Die
Aufgabe : LAPLACE-Transformation Die Laplace-Transformierte der Sprungantwort ist: Y (s) = 0.5 s + (s + 3).5 (s + 4) Die Sprungantwort ist die Reaktion auf den Einheitssprung: w(t) = σ(t) W (s) = s Die
Einleitung Einführung in die Aufgabenstellung der Regelungstechnik Beispiel einer Wasserstandsregelung 5
 INHALTSVERZEICHNIS Einleitung 1 1. Einführung in die Aufgabenstellung der Regelungstechnik 5 1.1 Beispiel einer Wasserstandsregelung 5 1.1.1 Verbale Systembeschreibung 5 1.1.2 Anforderungen an die Regelung
INHALTSVERZEICHNIS Einleitung 1 1. Einführung in die Aufgabenstellung der Regelungstechnik 5 1.1 Beispiel einer Wasserstandsregelung 5 1.1.1 Verbale Systembeschreibung 5 1.1.2 Anforderungen an die Regelung
Rechnergestützter ENTWURF und UNTERSUCHUNG einer PROZESSREGELUNG - DIGITALE SIMULATION
 Rechnergestützter ENTWURF und UNTERSUCHUNG einer PROZESSREGELUNG - DIGITALE SIMULATION 1 LABORRICHTLINIEN 2 EINFÜHRUNG 3 PROZESS-STRUKTUR UND -DATEN 4 VERSUCHSVORBEREITUNG 5 VERSUCHSDURCHFÜHRUNG 6 DOKUMENTATION
Rechnergestützter ENTWURF und UNTERSUCHUNG einer PROZESSREGELUNG - DIGITALE SIMULATION 1 LABORRICHTLINIEN 2 EINFÜHRUNG 3 PROZESS-STRUKTUR UND -DATEN 4 VERSUCHSVORBEREITUNG 5 VERSUCHSDURCHFÜHRUNG 6 DOKUMENTATION
Fahrzeugmechatronik Masterstudiengang M 3.2 Sensoren und Aktoren Labor für Automatisierung und Dynamik AuD FB 03MB
 Abb. 6 Dreidimensionale Darstellung des Frequenzgangs G ATP () s, Achsteilungen s 2 π in Hz Prof. Dr. Höcht 1/29 18.06.2006 11:13 Z_ Abb. 7 Einfluß des Pols bei s imaginären Achse, Achsteilungen in Hz
Abb. 6 Dreidimensionale Darstellung des Frequenzgangs G ATP () s, Achsteilungen s 2 π in Hz Prof. Dr. Höcht 1/29 18.06.2006 11:13 Z_ Abb. 7 Einfluß des Pols bei s imaginären Achse, Achsteilungen in Hz
Grundlagen der Regelungstechnik Theorie, elektronische Regelungen, digitale Regeleinrichtungen, Fuzzy-Regelung
 Karl-Heinz Reuther Grundlagen der Regelungstechnik Theorie, elektronische Regelungen, digitale Regeleinrichtungen, Fuzzy-Regelung Berichte aus der Steuerungs- und Regelungstechnik Karl-Heinz Reuther Grundlagen
Karl-Heinz Reuther Grundlagen der Regelungstechnik Theorie, elektronische Regelungen, digitale Regeleinrichtungen, Fuzzy-Regelung Berichte aus der Steuerungs- und Regelungstechnik Karl-Heinz Reuther Grundlagen
Die Eigenschaften von Systemen. S gesendet. S gesendet. S gesendet. Ideales System (idealer Wandler): Die Signaleigenschaften werden nicht verändert
: Die Signaleigenschaften werden nicht verändert") Die Eigenschaften von Systemen Ideales System (idealer Wandler): Die Signaleigenschaften werden nicht verändert S gesendet IDEALER WANDLER S gesendet Reales System (realer Wandler): Es entstehen Verzerrungen
Die Eigenschaften von Systemen Ideales System (idealer Wandler): Die Signaleigenschaften werden nicht verändert S gesendet IDEALER WANDLER S gesendet Reales System (realer Wandler): Es entstehen Verzerrungen
Frequenzganganalyse, Teil 3: PT1- und DT1- Glieder
 FELJC Frequenzganganalyse_neu_3.odt 1 Frequenzganganalyse, Teil 3: PT1- und DT1- Glieder 3.1 PT1-Glieder a) Wiederholung: Sprungantwort Beispiel: Ein Regelkreisglied hat bei einem Eingangssprung von 5V
FELJC Frequenzganganalyse_neu_3.odt 1 Frequenzganganalyse, Teil 3: PT1- und DT1- Glieder 3.1 PT1-Glieder a) Wiederholung: Sprungantwort Beispiel: Ein Regelkreisglied hat bei einem Eingangssprung von 5V
Kybernetik LTI-Systeme
 Kybernetik LTI-Systeme Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 26. 04. 2012 Was ist Kybernetik? environment agent Kybernetik ermöglicht, die Rückkopplung
Kybernetik LTI-Systeme Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 26. 04. 2012 Was ist Kybernetik? environment agent Kybernetik ermöglicht, die Rückkopplung
() 2. K I Aufgabe 5: x(t) W(s) - X(s) G 1 (s) Z 1 (s) Z 2 (s) G 3 (s) G 2 (s) G 4 (s) X(s)
 2. K I Aufgabe 5: x(t) W(s) - X(s) G 1 (s) Z 1 (s) Z 2 (s) G 3 (s) G 2 (s) G 4 (s) X(s)") Seite 1 von 2 Name: Matr. Nr.: Note: Punkte: Aufgabe 1: Ermitteln Sie durch grafische Umwandlung des dargestellten Systems die Übertragungsfunktion X () G s =. Z s 2 () W(s) G 1 (s) G 2 (s) Z 1 (s) G 3
Seite 1 von 2 Name: Matr. Nr.: Note: Punkte: Aufgabe 1: Ermitteln Sie durch grafische Umwandlung des dargestellten Systems die Übertragungsfunktion X () G s =. Z s 2 () W(s) G 1 (s) G 2 (s) Z 1 (s) G 3
3. Übung zur Vorlesung Steuer- und Regelungstechnik
 3. Übung zur Vorlesung Steuer- und Regelungstechnik Linearisierung Felix Goßmann M.Sc. Institut für Steuer- und Regelungstechnik Fakultät für Luft- und Raumfahrttechnik Universität der Bundeswehr München
3. Übung zur Vorlesung Steuer- und Regelungstechnik Linearisierung Felix Goßmann M.Sc. Institut für Steuer- und Regelungstechnik Fakultät für Luft- und Raumfahrttechnik Universität der Bundeswehr München
Regelungstechnik für Ingenieure
 Manfred Reuter Serge Zacher Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 12., korrigierte und erweiterte Auflage Mit 388 Abbildungen, 11 Beispielen und 34 Aufgaben STUDIUM
Manfred Reuter Serge Zacher Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 12., korrigierte und erweiterte Auflage Mit 388 Abbildungen, 11 Beispielen und 34 Aufgaben STUDIUM
1. Laborpraktikum. Abbildung 1: Gleichstrommotor Quanser QET
 Prof. Dr.-Ing. Jörg Raisch Dipl.-Ing. Stephanie Geist Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte Lehrveranstaltung Grundlagen der Regelungstechnik
Prof. Dr.-Ing. Jörg Raisch Dipl.-Ing. Stephanie Geist Fachgebiet Regelungssysteme Fakultät IV Elektrotechnik und Informatik Technische Universität Berlin Integrierte Lehrveranstaltung Grundlagen der Regelungstechnik
SYSTEMTHEORIE. Prof. Dr.-Ing. Michael Schnell Prof. Dr. August Reiner Dipl. Ing. Manfred Schneider
 SYSTEMTHEORIE Prof. Dr.-Ing. Michael Schnell Prof. Dr. August Reiner Dipl. Ing. Manfred Schneider Hochschule Darmstadt University of applied Science Stand: 17.11.2016 Prof. Dr.-Ing. Michael Schnell Professor
SYSTEMTHEORIE Prof. Dr.-Ing. Michael Schnell Prof. Dr. August Reiner Dipl. Ing. Manfred Schneider Hochschule Darmstadt University of applied Science Stand: 17.11.2016 Prof. Dr.-Ing. Michael Schnell Professor
Regelungstechnik für Ingenieure
 Manfred Reuter Regelungstechnik für Ingenieure 7., überarbeitete und erweiterte Auflage Mit 322 Bildern Friedr. Vieweg & Sohn Braunschweig/Wiesbaden Inhaltsverzeichnis Formelzeichen 1 Einführung 1 1.1
Manfred Reuter Regelungstechnik für Ingenieure 7., überarbeitete und erweiterte Auflage Mit 322 Bildern Friedr. Vieweg & Sohn Braunschweig/Wiesbaden Inhaltsverzeichnis Formelzeichen 1 Einführung 1 1.1
Klausur im Fach: Regelungs- und Systemtechnik 1
 (in Druckschrift ausfüllen!) Univ.-Prof. Dr.-Ing. habil. Ch. Ament Name: Vorname: Matr.-Nr.: Sem.-Gr.: Anzahl der abgegebenen Blätter: 3 Klausur im Fach: Prüfungstermin: 26.03.2013 Prüfungszeit: 11:30
(in Druckschrift ausfüllen!) Univ.-Prof. Dr.-Ing. habil. Ch. Ament Name: Vorname: Matr.-Nr.: Sem.-Gr.: Anzahl der abgegebenen Blätter: 3 Klausur im Fach: Prüfungstermin: 26.03.2013 Prüfungszeit: 11:30
Herbert Bernstein. Regelungstechnik. Theorie und Praxis. mit WinFACT und Multisim. Elektor-Verlag, Aachen
 Herbert Bernstein Regelungstechnik Theorie und Praxis mit WinFACT und Multisim Elektor-Verlag, Aachen Inhaltsverzeichnis Vorwort 7 1 Einführung in die Regelungstechnik 9 11 Lösung Regelungsaufgaben von
Herbert Bernstein Regelungstechnik Theorie und Praxis mit WinFACT und Multisim Elektor-Verlag, Aachen Inhaltsverzeichnis Vorwort 7 1 Einführung in die Regelungstechnik 9 11 Lösung Regelungsaufgaben von
Regelungstechnik für Ingenieure
 Serge Zacher Manfred Reuter Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 13., überarbeitete und erweiterte Auflage Mit 397 Abbildungen, 96 Beispielen und 32 Aufgaben
Serge Zacher Manfred Reuter Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen 13., überarbeitete und erweiterte Auflage Mit 397 Abbildungen, 96 Beispielen und 32 Aufgaben
Regelungstechnik. Zustandsgleichungcen / Übertragungsfunktionen normaler Übertragungsglieder. i c =C du dt. Zustands.- und Ausgangsgleichungen:
 Regelungstechnik Zustandsgleichungcen / Übertragungsfunktionen normaler Übertragungsglieder Energiespeicher: Zustandsgröße: Kondensator Spannung i c C du Zustands.- und Ausgangsgleichungen: Aus den Knoten:
Regelungstechnik Zustandsgleichungcen / Übertragungsfunktionen normaler Übertragungsglieder Energiespeicher: Zustandsgröße: Kondensator Spannung i c C du Zustands.- und Ausgangsgleichungen: Aus den Knoten:
Regelungstechnik 1. Oldenbourg Verlag München Wien
 Regelungstechnik 1 Lineare und Nichtlineare Regelung, Rechnergestützter Reglerentwurf von Prof. Dr. Gerd Schulz 3., überarbeitete und erweiterte Auflage Oldenbourg Verlag München Wien Inhaltsverzeichnis
Regelungstechnik 1 Lineare und Nichtlineare Regelung, Rechnergestützter Reglerentwurf von Prof. Dr. Gerd Schulz 3., überarbeitete und erweiterte Auflage Oldenbourg Verlag München Wien Inhaltsverzeichnis
Autonome Mobile Systeme
 Autonome Mobile Systeme Teil II: Systemtheorie für Informatiker Dr. Mohamed Oubbati Institut für Neuroinformatik Universität Ulm SS 2007 Wiederholung vom letzten Mal! Die Übertragungsfunktion Die Übertragungsfunktion
Autonome Mobile Systeme Teil II: Systemtheorie für Informatiker Dr. Mohamed Oubbati Institut für Neuroinformatik Universität Ulm SS 2007 Wiederholung vom letzten Mal! Die Übertragungsfunktion Die Übertragungsfunktion
a) Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes.
 Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes.") 144 Minuten Seite 1 NAME VORNAME MATRIKEL-NR. Aufgabe 1 (je 2 Punkte) a) Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes. b) Was ist ein Mehrgrößensystem?
144 Minuten Seite 1 NAME VORNAME MATRIKEL-NR. Aufgabe 1 (je 2 Punkte) a) Beschreiben Sie den Unterschied zwischen einer Regelung und einer Steuerung an Hand eines Blockschaltbildes. b) Was ist ein Mehrgrößensystem?
Mathematik-Tutorium für Maschinenbauer II: Differentialgleichungen und Vektorfelder
 DGL Schwingung Physikalische Felder Mathematik-Tutorium für Maschinenbauer II: Differentialgleichungen und Vektorfelder Johannes Wiedersich 23. April 2008 http://www.e13.physik.tu-muenchen.de/wiedersich/
DGL Schwingung Physikalische Felder Mathematik-Tutorium für Maschinenbauer II: Differentialgleichungen und Vektorfelder Johannes Wiedersich 23. April 2008 http://www.e13.physik.tu-muenchen.de/wiedersich/
Peter F. Orlowski. Praktische Regeltechnik
 Peter F. Orlowski Praktische Regeltechnik Springer-Verlag Berlin Heidelberg GmbH Peter F. Orlowski Praktische Regeltechnik Anwendungsorientierte Einführung für Maschinenbauer und Elektrotechniker Fünfte
Peter F. Orlowski Praktische Regeltechnik Springer-Verlag Berlin Heidelberg GmbH Peter F. Orlowski Praktische Regeltechnik Anwendungsorientierte Einführung für Maschinenbauer und Elektrotechniker Fünfte
Regelungstechnik 1. Systemtheoretische Grundlagen, Analyse und Entwurf einschleifiger Regelungen
 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Jan Lunze Regelungstechnik 1 Systemtheoretische Grundlagen, Analyse
2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Jan Lunze Regelungstechnik 1 Systemtheoretische Grundlagen, Analyse
Klausur. Grundlagen der Mechatronik und Systemtechnik
 23.08.2012 Klausur Grundlagen der Mechatronik und Systemtechnik Name: Matrikel-Nr.: Hinweise zur Bearbeitung: Die Klausur besteht aus 4 Aufgaben. Es sind alle Aufgaben zu bearbeiten. Die Bearbeitungszeit
23.08.2012 Klausur Grundlagen der Mechatronik und Systemtechnik Name: Matrikel-Nr.: Hinweise zur Bearbeitung: Die Klausur besteht aus 4 Aufgaben. Es sind alle Aufgaben zu bearbeiten. Die Bearbeitungszeit
Steuer- und und Regelungstechnik II
 Steuer- und und Regelungstechnik II II Vorlesung: Dozent: Professor Ferdinand Svaricek Ort: Ort: 33/03 Zeit: Zeit: Mi Mi 8.5 8.5 9.45 9.45 Uhr Uhr Seminarübungen: Dozent: Dr. Dr. Klaus-Dieter Otto Otto
Steuer- und und Regelungstechnik II II Vorlesung: Dozent: Professor Ferdinand Svaricek Ort: Ort: 33/03 Zeit: Zeit: Mi Mi 8.5 8.5 9.45 9.45 Uhr Uhr Seminarübungen: Dozent: Dr. Dr. Klaus-Dieter Otto Otto
Frequenzganganalyse, Teil 2: P-, I- und D - Glieder
 FELJC Frequenzganganalyse_neu_2.odt 1 Frequenzganganalyse, Teil 2: P-, I- und D - Glieder 2.1 P0-Glieder P0: P-Glied ohne Verzögerung P-Glied nullter Ordnung Aufgabe 2.1: Bestimme den Proportionalbeiwert
FELJC Frequenzganganalyse_neu_2.odt 1 Frequenzganganalyse, Teil 2: P-, I- und D - Glieder 2.1 P0-Glieder P0: P-Glied ohne Verzögerung P-Glied nullter Ordnung Aufgabe 2.1: Bestimme den Proportionalbeiwert
Übung 8 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN
 Fakultät Informatik, Institut für Angewandte Informatik, Professur Technische Informationssysteme Übung 8 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN Übungsleiter: Dr.-Ing. H.-D. Ribbecke
Fakultät Informatik, Institut für Angewandte Informatik, Professur Technische Informationssysteme Übung 8 zur Vorlesung SYSTEMORIENTIERTE INFORMATIK HW-, SW-CODESIGN Übungsleiter: Dr.-Ing. H.-D. Ribbecke
Regelungstechnik und Simulationstechnik mit Scilab und Modelica
 Peter Beater Regelungstechnik und Simulationstechnik mit Scilab und Modelica Eine beispielorientierte Einführung für Studenten und Anwender aus dem Maschinenbau Inhaltsverzeichnis Begriffe und Formelzeichen
Peter Beater Regelungstechnik und Simulationstechnik mit Scilab und Modelica Eine beispielorientierte Einführung für Studenten und Anwender aus dem Maschinenbau Inhaltsverzeichnis Begriffe und Formelzeichen
Elementare Regelungstechnik
 Peter Busch Elementare Regelungstechnik Allgemeingültige Darstellung ohne höhere Mathematik 2., korrigierte Auflage Vogel Buchverlag Inhaltsverzeichnis 1 Einführung 13 1.1 Steuern - Regeln 13 1.1.1 Steuern
Peter Busch Elementare Regelungstechnik Allgemeingültige Darstellung ohne höhere Mathematik 2., korrigierte Auflage Vogel Buchverlag Inhaltsverzeichnis 1 Einführung 13 1.1 Steuern - Regeln 13 1.1.1 Steuern
Regelungstechnik für Ingenieure
 Manfred Reuter Regelungstechnik für Ingenieure 9., überarbeitete und erweiterte Auflage Mit 291 Bildern, 43 Beispiele und 27 Aufgaben vieweg VII Inhaltsverzeichnis Formelzeichen XI 1 Einleitung 1 1.1 Das
Manfred Reuter Regelungstechnik für Ingenieure 9., überarbeitete und erweiterte Auflage Mit 291 Bildern, 43 Beispiele und 27 Aufgaben vieweg VII Inhaltsverzeichnis Formelzeichen XI 1 Einleitung 1 1.1 Das
Praktische Regelungstechnik
 Dieter Schulz Praktische Regelungstechnik Ein Leitfaden für Einsteiger Hüthig Buch Verlag Heidelberg Inhaltsverzeichnis 1 Technische Systeme 1 1.1 Bildliche Darstellungen technischer Systeme 2 1.2 Signalarten
Dieter Schulz Praktische Regelungstechnik Ein Leitfaden für Einsteiger Hüthig Buch Verlag Heidelberg Inhaltsverzeichnis 1 Technische Systeme 1 1.1 Bildliche Darstellungen technischer Systeme 2 1.2 Signalarten
Institut für Elektrotechnik und Informationstechnik. Aufgabensammlung zur. Regelungstechnik B. Prof. Dr. techn. F. Gausch Dipl.-Ing. C.
 Institut für Elektrotechnik und Informationstechnik Aufgabensammlung zur Regelungstechnik B Prof. Dr. techn. F. Gausch Dipl.-Ing. C. Balewski 10.03.2011 Übungsaufgaben zur Regelungstechnik B Aufgabe 0
Institut für Elektrotechnik und Informationstechnik Aufgabensammlung zur Regelungstechnik B Prof. Dr. techn. F. Gausch Dipl.-Ing. C. Balewski 10.03.2011 Übungsaufgaben zur Regelungstechnik B Aufgabe 0
INSTITUT FÜR REGELUNGSTECHNIK
 Aufgabe 9: Regler mit schaltendem Stellglied führen auf besonders einfache technische Lösungen. Durch pulsbreitenmoduliertes Schalten mit genügend hoher Frequenz ist auch hier eine angenähert lineare Betriebsweise
Aufgabe 9: Regler mit schaltendem Stellglied führen auf besonders einfache technische Lösungen. Durch pulsbreitenmoduliertes Schalten mit genügend hoher Frequenz ist auch hier eine angenähert lineare Betriebsweise
Probeklausur Signale + Systeme Kurs TIT09ITA
 Probeklausur Signale + Systeme Kurs TIT09ITA Dipl.-Ing. Andreas Ströder 13. Oktober 2010 Zugelassene Hilfsmittel: Alle außer Laptop/PC Die besten 4 Aufgaben werden gewertet. Dauer: 120 min 1 Aufgabe 1
Probeklausur Signale + Systeme Kurs TIT09ITA Dipl.-Ing. Andreas Ströder 13. Oktober 2010 Zugelassene Hilfsmittel: Alle außer Laptop/PC Die besten 4 Aufgaben werden gewertet. Dauer: 120 min 1 Aufgabe 1
1 Reglerentwurf nach dem Betragsoptimum
 Reglerentwurf nach dem Betragsoptimum Für einfache d.h. einschleifige, lineare Regelungen mit ausgesprägtem Tiefpassverhalten ist der Entwurf nach dem Betragsoptimum relativ leicht anwendbar. w G K (s)
Reglerentwurf nach dem Betragsoptimum Für einfache d.h. einschleifige, lineare Regelungen mit ausgesprägtem Tiefpassverhalten ist der Entwurf nach dem Betragsoptimum relativ leicht anwendbar. w G K (s)
Einführung in die Regelungstechnik II - Reglerentwurf und diskrete Systeme -
 Einführung in die Regelungstechnik II - - Torsten Kröger Technische Universität - 1/64 - Braunschweig - 2/64 - Wiederholung - Einführung in die Regelungstechnik I Blockschema eines Regelkreises Kontinuierliche
Einführung in die Regelungstechnik II - - Torsten Kröger Technische Universität - 1/64 - Braunschweig - 2/64 - Wiederholung - Einführung in die Regelungstechnik I Blockschema eines Regelkreises Kontinuierliche
Versuchsanleitung. Labor Mechatronik. Versuch DV_5 Regelkreis mit analogen Reglern. Labor Mechatronik Versuch BV-5 analoge Regelung
 Fachbereich 2 Ingenieurwissenschaften II Labor Mechatronik Steuerungund Regelung Lehrgebiet: Mechatronik Versuchsanleitung Versuch DV_5 Regelkreis mit analogen Reglern FB2 Stand April 2009 Seite1von 9
Fachbereich 2 Ingenieurwissenschaften II Labor Mechatronik Steuerungund Regelung Lehrgebiet: Mechatronik Versuchsanleitung Versuch DV_5 Regelkreis mit analogen Reglern FB2 Stand April 2009 Seite1von 9
Elementare Regelungstechnik
 Peter Busch Elementare Regelungstechnik Allgemeingültige Darstellung ohne höhere Mathematik 7., überarbeitete Auflage Vogel Buchverlag Inhaltsverzeichnis Vorwort 5 1 Einführung 13 1.1 Steuern - Regeln
Peter Busch Elementare Regelungstechnik Allgemeingültige Darstellung ohne höhere Mathematik 7., überarbeitete Auflage Vogel Buchverlag Inhaltsverzeichnis Vorwort 5 1 Einführung 13 1.1 Steuern - Regeln
Differentialgleichungen 2. Ordnung
 Differentialgleichungen 2. Ordnung 1-E1 1-E2 Einführendes Beispiel Freier Fall Viele Geschichten ranken sich um den schiefen Turm von Pisa: Der Legende nach hat der aus Pisa stammende Galileo Galilei bei
Differentialgleichungen 2. Ordnung 1-E1 1-E2 Einführendes Beispiel Freier Fall Viele Geschichten ranken sich um den schiefen Turm von Pisa: Der Legende nach hat der aus Pisa stammende Galileo Galilei bei
Bildmaterial zur Vorlesung Regelungstechnik Teil III Der Regelkreis. Wintersemester 2014 Prof. Dr.-Ing. habil. Klaus-Peter Döge
 Bildmaterial zur Vorlesung Regelungstechnik Teil III Der Regelkreis Wintersemester 04 Prof. Dr.-Ing. habil. Klaus-Peter Döge Regelkreis nach DIN 96 Teil 5 Vereinfachter Regelkreis 3 Einführendes Beispiel
Bildmaterial zur Vorlesung Regelungstechnik Teil III Der Regelkreis Wintersemester 04 Prof. Dr.-Ing. habil. Klaus-Peter Döge Regelkreis nach DIN 96 Teil 5 Vereinfachter Regelkreis 3 Einführendes Beispiel
INSTITUT FÜR REGELUNGSTECHNIK
 Lösung Übung 3 Aufgabe: Kaskadenregelung a Berechnung der Teilübertragungsfunktion G 3 s: V4 G 3 s Y 3s Xs T 4 s + + V 5 V 3 T 5 s + T 3 s + V4 T 5 s + T 4 s + V 5 V 3 T 4 s +T 5 s + T 3 s + V 3 [V 4 T
Lösung Übung 3 Aufgabe: Kaskadenregelung a Berechnung der Teilübertragungsfunktion G 3 s: V4 G 3 s Y 3s Xs T 4 s + + V 5 V 3 T 5 s + T 3 s + V4 T 5 s + T 4 s + V 5 V 3 T 4 s +T 5 s + T 3 s + V 3 [V 4 T
Eingebettete Systeme
 Institut für Informatik Lehrstuhl für Eingebettete Systeme Prof. Dr. Uwe Brinkschulte Benjamin Betting Eingebettete Systeme 1. Aufgabe (Regelsystem) 3. Übungsblatt Lösungsvorschlag a) Das Fahrzeug kann
Institut für Informatik Lehrstuhl für Eingebettete Systeme Prof. Dr. Uwe Brinkschulte Benjamin Betting Eingebettete Systeme 1. Aufgabe (Regelsystem) 3. Übungsblatt Lösungsvorschlag a) Das Fahrzeug kann
PSpice 1. Versuch 9 im Informationselektronischen Praktikum. Studiengang Elektrotechnik und Informationstechnik
 Fakultät für Elektrotechnik und Informationstechnik Institut für Mikro- und Nanoelektronik Fachgebiet Elektronische Schaltungen und Systeme PSpice 1 Versuch 9 im Informationselektronischen Praktikum Studiengang
Fakultät für Elektrotechnik und Informationstechnik Institut für Mikro- und Nanoelektronik Fachgebiet Elektronische Schaltungen und Systeme PSpice 1 Versuch 9 im Informationselektronischen Praktikum Studiengang
Regelungstechnik. Steuerungs- und Reglungstechnik. Created with novapdf Printer (www.novapdf.com). Please register to remove this message.
. Please register to remove this message.") Regelungstechnik 336 Definition Steuerung Das Steuern, die Steuerung, ist der Vorgang in einem System, bei dem eine oder mehrere Größen als Eingangsgröße andere Größen als Ausgangsgrößen aufgrund der dem
Regelungstechnik 336 Definition Steuerung Das Steuern, die Steuerung, ist der Vorgang in einem System, bei dem eine oder mehrere Größen als Eingangsgröße andere Größen als Ausgangsgrößen aufgrund der dem
Einführung in die Regelungstechnik
 Einführung in die Regelungstechnik von Dipl.-Ing. Heinz Mann und Dr.-Ing. Horst Schiffelgen 2., überarbeitete und erweiterte Auflage, mit 283 Bildern \\ Carl Hanser Verlag München 1972 Inhaltsverzeichnis
Einführung in die Regelungstechnik von Dipl.-Ing. Heinz Mann und Dr.-Ing. Horst Schiffelgen 2., überarbeitete und erweiterte Auflage, mit 283 Bildern \\ Carl Hanser Verlag München 1972 Inhaltsverzeichnis
Prozessidentifikation mit Sprungantworten
 Fakultät Informatik, Institut für angewandte Informatik, Professur für technische Informationssysteme Hauptseminar Technische Informationssysteme Dresden, 27. April 2012 Überblick 1. Motivation und Begriffe
Fakultät Informatik, Institut für angewandte Informatik, Professur für technische Informationssysteme Hauptseminar Technische Informationssysteme Dresden, 27. April 2012 Überblick 1. Motivation und Begriffe
Elementare Regelungstechnik
 Peter Busch Elementare Regelungstechnik Allgemeingültige Darstellung ohne höhere Mathematik *v Vogel Buchverlag Inhaltsverzeichnis 1 Einführung 13 1.1 Steuern - Regeln 13 1.1.1 Steuern 13 1.1.2 Regeln
Peter Busch Elementare Regelungstechnik Allgemeingültige Darstellung ohne höhere Mathematik *v Vogel Buchverlag Inhaltsverzeichnis 1 Einführung 13 1.1 Steuern - Regeln 13 1.1.1 Steuern 13 1.1.2 Regeln
Praktikum. Modellbildung und Simulation. Stichworte: Modellbildung Analoge Simulation Digitale Simulation
 Praktikum Stichworte: Modellbildung Analoge Simulation Digitale Simulation Aufgabenstellung und Lösungsidee - Kennenlernen verschiedener Methoden zur Modellbildung eines mechanisches Schwingers - Abbildung
Praktikum Stichworte: Modellbildung Analoge Simulation Digitale Simulation Aufgabenstellung und Lösungsidee - Kennenlernen verschiedener Methoden zur Modellbildung eines mechanisches Schwingers - Abbildung
4. Der geschlossene Regelkreis mit P-Strecke und P-Regler
 FELJC 4a_Geschlossener_ Regelkreis_Störverhalten.odt 1 4. Der geschlossene Regelkreis mit P-Strecke und P-Regler 4.1. Störverhalten (disturbance behaviour, comportement au perturbations) 4.1.1 Angriffspunkt
FELJC 4a_Geschlossener_ Regelkreis_Störverhalten.odt 1 4. Der geschlossene Regelkreis mit P-Strecke und P-Regler 4.1. Störverhalten (disturbance behaviour, comportement au perturbations) 4.1.1 Angriffspunkt
60 Minuten Seite 1. Einlesezeit
 60 Minuten Seite 1 Einlesezeit Für die Durchsicht der Klausur wird eine Einlesezeit von 10 Minuten gewährt. Während dieser Zeitdauer ist es Ihnen nicht gestattet, mit der Bearbeitung der Aufgaben zu beginnen.
60 Minuten Seite 1 Einlesezeit Für die Durchsicht der Klausur wird eine Einlesezeit von 10 Minuten gewährt. Während dieser Zeitdauer ist es Ihnen nicht gestattet, mit der Bearbeitung der Aufgaben zu beginnen.
Einführung in die Mechatroniksimulation
 in die Mechatroniksimulation Prof. Dr. Ruprecht Altenburger ZHAW Institut für Mechatronische Systeme VPE Workshop, Rapperswil am 23.1.2014 1 / 19 1 Einleitung Mechatroniksimulation Modell starrer Körper
in die Mechatroniksimulation Prof. Dr. Ruprecht Altenburger ZHAW Institut für Mechatronische Systeme VPE Workshop, Rapperswil am 23.1.2014 1 / 19 1 Einleitung Mechatroniksimulation Modell starrer Körper
Systemtheorie Teil A. - Zeitkontinuierliche Signale und Systeme Übungsaufgaben. Manfred Strohrmann Urban Brunner
 Systemtheorie Teil A - Zeitkontinuierliche Signale und Systeme Übungsaufgaben Manfred Strohrmann Urban Brunner Inhalt Inhalt... Übungsaufgaben - Zeitkontinuierliche Signale... 4. Geschlossene Darstellung
Systemtheorie Teil A - Zeitkontinuierliche Signale und Systeme Übungsaufgaben Manfred Strohrmann Urban Brunner Inhalt Inhalt... Übungsaufgaben - Zeitkontinuierliche Signale... 4. Geschlossene Darstellung
Systemtheorie Teil A. - Zeitkontinuierliche Signale und Systeme - Übungsaufgaben. Manfred Strohrmann Urban Brunner
 Systemtheorie Teil A - Zeitkontinuierliche Signale und Systeme - Übungsaufgaben Manfred Strohrmann Urban Brunner Inhalt Inhalt... Übungsaufgaben Zeitkontinuierliche Signale... 5. Geschlossene Darstellung
Systemtheorie Teil A - Zeitkontinuierliche Signale und Systeme - Übungsaufgaben Manfred Strohrmann Urban Brunner Inhalt Inhalt... Übungsaufgaben Zeitkontinuierliche Signale... 5. Geschlossene Darstellung
Versuchsanleitung MV_5_1
 Modellbildung und Simulation Versuchsanleitung MV_5_1 FB 2 Stand August 2011 Prof. Dr.-Ing. Hartenstein Seite 1 von 11 1. Versuchsgegenstand Versuchsziel Ziel des Versuches ist es, die im Lehrfach Mechatronische
Modellbildung und Simulation Versuchsanleitung MV_5_1 FB 2 Stand August 2011 Prof. Dr.-Ing. Hartenstein Seite 1 von 11 1. Versuchsgegenstand Versuchsziel Ziel des Versuches ist es, die im Lehrfach Mechatronische
Operationsverstärker. Sascha Reinhardt. 17. Juli 2001
 Operationsverstärker Sascha Reinhardt 17. Juli 2001 1 1 Einführung Es gibt zwei gundlegende Operationsverstärkerschaltungen. Einmal den invertierenden Verstärker und einmal den nichtinvertierenden Verstärker.
Operationsverstärker Sascha Reinhardt 17. Juli 2001 1 1 Einführung Es gibt zwei gundlegende Operationsverstärkerschaltungen. Einmal den invertierenden Verstärker und einmal den nichtinvertierenden Verstärker.
Füllstandsstrecke SF 100
 Füllstandsstrecke SF 100 Das Problem: Begriffe und Vorgänge der erfahrbar machen. Auswahl einer anschaulichen didaktischen reduzierten, aber trotzdem praxisnahen Regelstrecke. Die Lösung: Die»trockene«Füllstandsstrecke
Füllstandsstrecke SF 100 Das Problem: Begriffe und Vorgänge der erfahrbar machen. Auswahl einer anschaulichen didaktischen reduzierten, aber trotzdem praxisnahen Regelstrecke. Die Lösung: Die»trockene«Füllstandsstrecke
Steuerungs- und Regelungskonzepte für eine fluidisch betriebene Roboterhand
 Steuerungs- und Regelungskonzepte für eine fluidisch betriebene Roboterhand Sebastian Beck, Arne Lehmann, Jan Martin, Thomas Lotz, Ralf Mikut Forschungszentrum Karlsruhe, Institut für Angewandte Informatik
Steuerungs- und Regelungskonzepte für eine fluidisch betriebene Roboterhand Sebastian Beck, Arne Lehmann, Jan Martin, Thomas Lotz, Ralf Mikut Forschungszentrum Karlsruhe, Institut für Angewandte Informatik
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 8.6.13 Arbeitszeit: 1 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierung am 8.6.13 Arbeitszeit: 1 min Name: Vorname(n): Matrikelnummer: Note: Aufgabe
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik. SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am
 Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am 10.12.2010 Arbeitszeit: 120 min Name: Vorname(n): Matrikelnummer:
Technische Universität Wien Institut für Automatisierungs- und Regelungstechnik SCHRIFTLICHE PRÜFUNG zur VU Automatisierungstechnik am 10.12.2010 Arbeitszeit: 120 min Name: Vorname(n): Matrikelnummer:
Musterlösung zur Klausur. Grundlagen der Mechatronik und Systemtechnik
 23.08.2012 Musterlösung zur Klausur Grundlagen der Mechatronik und Systemtechnik Name: Matrikel-Nr.: Hinweise zur Bearbeitung: Die Klausur besteht aus 4 Aufgaben. Es sind alle Aufgaben zu bearbeiten. Die
23.08.2012 Musterlösung zur Klausur Grundlagen der Mechatronik und Systemtechnik Name: Matrikel-Nr.: Hinweise zur Bearbeitung: Die Klausur besteht aus 4 Aufgaben. Es sind alle Aufgaben zu bearbeiten. Die
Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme. Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik
![Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme. Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik](/thumbs/69/59889032.jpg "Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme. Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik") Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik Sommersemester 2005 Inhaltsverzeichnis Inhalt Inhaltsverzeichnis 3 Zeitkontinuierliche
Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik Sommersemester 2005 Inhaltsverzeichnis Inhalt Inhaltsverzeichnis 3 Zeitkontinuierliche
Modellierung und Simulation
 Prüfung WS 009/010 Modellierung und Simulation Prof. Dr.-Ing. K. Wöllhaf Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Bitte Schreiben
Prüfung WS 009/010 Modellierung und Simulation Prof. Dr.-Ing. K. Wöllhaf Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Bitte Schreiben
:= (Energieprdoukt b x h) m 3
 m 3") - Feder: l F := 55 0 3 m (Länge der Feder) b F := 4 0 3 m (Breite der Feder) h F := 0.7 0 3 m (Dicke der Feder) E F 80 0 9 kg := (E-Modul) (=Pa) (Stahl) m s R m_federstahl := 800 0 6 Pa (Zugfestigkeit)
- Feder: l F := 55 0 3 m (Länge der Feder) b F := 4 0 3 m (Breite der Feder) h F := 0.7 0 3 m (Dicke der Feder) E F 80 0 9 kg := (E-Modul) (=Pa) (Stahl) m s R m_federstahl := 800 0 6 Pa (Zugfestigkeit)
Einführung in die Regelungstechnik
 Einführung in die Regelungstechnik von Heinz Mann und Horst Schiffelgen 6., bearbeitete und erweiterte Auflage, mit 349 Bildern Carl Hanser Verlag München Wien Formelzeichen XII Einleitung 1 1 Steuerung
Einführung in die Regelungstechnik von Heinz Mann und Horst Schiffelgen 6., bearbeitete und erweiterte Auflage, mit 349 Bildern Carl Hanser Verlag München Wien Formelzeichen XII Einleitung 1 1 Steuerung
Regelungstechnik für Ingenieure
 Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen Bearbeitet von Serge Zacher, Manfred Reuter 15., korrigierte Auflage 2017. Buch. XVIII, 515 S. Softcover ISBN 978 3 658
Regelungstechnik für Ingenieure Analyse, Simulation und Entwurf von Regelkreisen Bearbeitet von Serge Zacher, Manfred Reuter 15., korrigierte Auflage 2017. Buch. XVIII, 515 S. Softcover ISBN 978 3 658
Berechnung, Simulation und Messungen an einem Regelkreises aus I-Strecke und P-Regler.
 Ziel des vierten Versuchs: Berechnung, Simulation und Messungen an einem Regelkreises aus I-Strecke und P-Regler. 4. Berechnung, Simulation und Messung des Frequenzgangs einer I-Strecke F R (s) F S (s)
Ziel des vierten Versuchs: Berechnung, Simulation und Messungen an einem Regelkreises aus I-Strecke und P-Regler. 4. Berechnung, Simulation und Messung des Frequenzgangs einer I-Strecke F R (s) F S (s)
Grundlagen der Regelungstechnik
 Grundlagen der Regelungstechnik Dr.-Ing. Georg von Wichert Siemens AG, Corporate Technology, München Termine Nächste Termine: 28.., 4.2. Wiederholung vom letzten Mal Regelkreis Geschlossener Regelkreis
Grundlagen der Regelungstechnik Dr.-Ing. Georg von Wichert Siemens AG, Corporate Technology, München Termine Nächste Termine: 28.., 4.2. Wiederholung vom letzten Mal Regelkreis Geschlossener Regelkreis
2. Eigenschaften dynamischer Systeme
 2. Eigenschaften dynamischer Systeme 2.1 Allgemeine Systemeigenschaften 2.1.1 Signale 2.1.2 Systeme Definition: System Ein System ist ein natürliches oder künstliches Gebilde. Es kann Eingangs-Signale
2. Eigenschaften dynamischer Systeme 2.1 Allgemeine Systemeigenschaften 2.1.1 Signale 2.1.2 Systeme Definition: System Ein System ist ein natürliches oder künstliches Gebilde. Es kann Eingangs-Signale