Projektionen für f r die Scanregistrierung mit Hilfe von Bildmerkmalen
|
|
|
- Fritzi Tiedeman
- vor 6 Jahren
- Abrufe
Transkript



1 Projektionen für f r die Scanregistrierung mit Hilfe von Bildmerkmalen Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring Bremen 1
 (animation) Kombination terrestrisches / kinematisches")
2 Hintergrund (1) Automatisierung von terrestrischen Laserscanning große Datenmengen (video) (animation) Kombination terrestrisches / kinematisches Laserscanning 2
3 Hintergrund (2) Abbildung einer Kugel auf ein 2D-Bild (video) 3

4 Kugelkoordinaten 3D-Laserscanner nutzen das tachymetrischen Messprinzip, bei dem das instrumenteneigene polare Koordinatensystem durch eine vertikale Drehachse, eine horizontale Drehachse sowie durch den Laserstrahl realisiert wird 4

5 Gleichmäßige Rektangularprojektion 5

6 Zylindrische Projektion 6


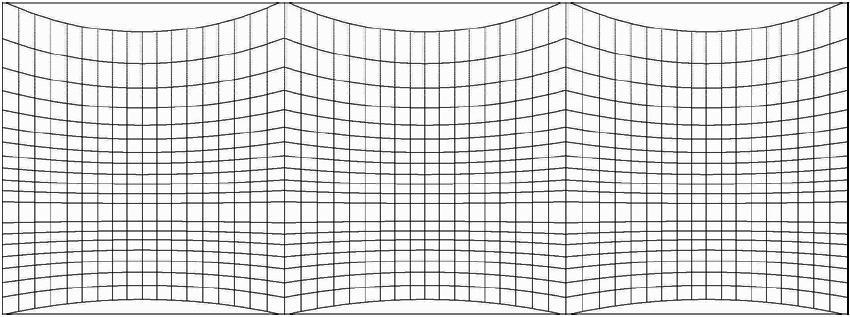
7 Mercator Projektion 7

8 Hochachsenprojektion 8


9 Rektangularprojektion 9
10 Pannini-Projektion 10


11 Stereographische Projektion 11
12 SIFT-Merkmale (1) 1. Erzwinge Skalierungsinvarianz: Berechne die DOG für viele verschiedene Skalen; benutze non-maximum suppression, finde lokale Maxima, als Keypoint - Kandidaten 2. Lokalisiere Ecken: Für jedes Maximum fitte eine quadratische Funktion. Berechne das Zentrum mit Sub-Pixel Genauigkeit durch Null-Setzen der ersten Ableitung. 3. Eliminiere Kanten: Berechne das Verhältnis der Eigenwerte, Wirf diejenigen Keypoints weg, bei denen das Verhälnis größer als ein Schwellwert ist. 4. Erzwinge Invarianz bezüglich Rotation: Berechne die Orientierung um Rotationsinvarianz zu erhalten durch das Finden der größten zweiten Ableitung in einem geglätteten Bild. (evtl. gibt es mehrere Orientierungen) Rotiere den Ausschnitt, so dass der Orientierungsvektor nach oben zeigt. 5. Berechne eine Merkmalssignatur: Berechne ein Gradientenhistogram" auf dem Bildausschnitt (4x4 Pixel). Orientiere den Ausschnitt so, dass die größte Gradient nach oben zeigt. Ergebnis: Merkmalvektor mit 128 Werten (15 Einträge, 8 Gradienten). 6. Erzwinge Illuminationsinvarianz: Normalisiere Vektor zu Einheitsvekotor. Bearbeite alle Gradienten mit einem Schwellwert, um Invarianz zur Saturierung zu erreichen. 12

13 SIFT-Merkmale (2) Typischerweise zirka Merkmale in einem Bild mit 3.6 Megapixel Beispiel: 13
 Für jede der 4 4 Regionen wird ein 4-Vektor mit Haar- Merkalen berechnet, konkateniert zu einem Deskriptor der Länge 64.")
14 SURF-Merkmale und Deskriptor DOG-Filter (Difference of Gaussian) der SIFT-Merkmale wird approximiert. Dies geschieht durch einen Kasten-Filter (Dob, engl. Difference of Boxes) Für jede der 4 4 Regionen wird ein 4-Vektor mit Haar- Merkalen berechnet, konkateniert zu einem Deskriptor der Länge 64. Invarianz gegen Beleuchtung entsteht durch die verwendeten Haar-Merkmale, gegen Skalierung durch Normierung des Vektors. 14


15 Merkmalszuordnung (SIFT / SIFT) 15

16 Merkmalszuordnung (SURF / SURF) 16
17 RANSAC Generiere M (eine vordefinierte Anzahl) von Modelhypothesen, jede davon wird mit einem minimaler Teilmenge von Punkten berechnet Evaluiere jede Hypothese Berechne die übrigen Fehler bei Verwendung aller Daten. Punkte mit Fehlern kleiner als ein Schwellwert werden als Inlier klassifiziert Die Hypothese mit einer maximalen Anzahl von Inlier wird ausgewählt. Anschließend wird die Hypothese neu geschätzt nur auf den Inlier basierend. 17
18 Ergebnisse (1) Typische Ergebnisse der Merkmalsextraktion Typische Matching und Registrierungsergebnisse 18
19 Ergebnisse (2) funktioniert alles gut, hängt aber wesentlich vom Überlappungsbereich ab 19
, aber weder flächentreu noch richtungstreu Test weiterer Merkmale und deren Deskriptoren (ORB, FAST, ) 20")
20 Ergebnisse (3) Nur mit der Mercator-Projektion waren wir in der Lage, den kompletten Datensatz (13 3D-Scans) automatisch zu registrieren. Mercator: winkeltreu (formtreu), aber weder flächentreu noch richtungstreu Test weiterer Merkmale und deren Deskriptoren (ORB, FAST, ) 20
21 Zusammenfassung & Ausblick SIFT / SURF basierte Registrierungen funktionieren sehr gut Projektionen von 3D-Scans für merkmalsbasierte Registrierung sollte berücksichtigt werden Software: in 3DTK The 3D Toolkit Aktuell: Umstellung auf OpenCV Zukünftig: Implementierung eines 3D-Operators zur Erkennung natürlicher Landmarken 21
Bildmerkmalssuche. Seminar Computational Photography. Visual Computing Department of Computer Science
 Bildmerkmalssuche Seminar Computational Photography EINFÜHRUNG 2 Einführung Bildmerkmalssuche: sehr wichtiges Thema des künstlichen Sehens Erkennen von Objekten auf dem Bild oder in einer Bildsequenz anhand
Bildmerkmalssuche Seminar Computational Photography EINFÜHRUNG 2 Einführung Bildmerkmalssuche: sehr wichtiges Thema des künstlichen Sehens Erkennen von Objekten auf dem Bild oder in einer Bildsequenz anhand
Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform. Thorsten Jost INF-M2 AW1 Sommersemester
 Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform Thorsten Jost INF-M2 AW1 Sommersemester 2008 Agenda Motivation Feature Detection Beispiele Posenbestimmung in Räumen
Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform Thorsten Jost INF-M2 AW1 Sommersemester 2008 Agenda Motivation Feature Detection Beispiele Posenbestimmung in Räumen
Tutorium Mathematik II, M Lösungen
 Tutorium Mathematik II, M Lösungen 7. Juni 201 *Aufgabe 1. Gegeben seien fx, y = xy 2 8e x+y und P = 1, 2. Der Gradient von f ist genau an der Stelle P Null. a Untersuchen Sie mit Hilfe der Hesse-Matrix,
Tutorium Mathematik II, M Lösungen 7. Juni 201 *Aufgabe 1. Gegeben seien fx, y = xy 2 8e x+y und P = 1, 2. Der Gradient von f ist genau an der Stelle P Null. a Untersuchen Sie mit Hilfe der Hesse-Matrix,
Implementierung und Evaluierung von Video Feature Tracking auf moderner Grafik Hardware
 Implementierung und Evaluierung von Video Feature Tracking auf moderner Diplomarbeit vorgelegt von Sebastian Heymann Betreut von Prof. Dr. Bernd Fröhlich Bauhaus Universität t Dr. Aljoscha Smolic Fraunhofer
Implementierung und Evaluierung von Video Feature Tracking auf moderner Diplomarbeit vorgelegt von Sebastian Heymann Betreut von Prof. Dr. Bernd Fröhlich Bauhaus Universität t Dr. Aljoscha Smolic Fraunhofer
Suche nach korrespondierenden Pixeln in zwei Bildern
 Suche nach korrespondierenden Pixeln in zwei Bildern Seminar Algorithmen zur Erzeugung von Panoramabildern von Philip Mildner April 2008 Universität Mannheim Lehrstuhl Praktische Informatik IV Prof. Dr.
Suche nach korrespondierenden Pixeln in zwei Bildern Seminar Algorithmen zur Erzeugung von Panoramabildern von Philip Mildner April 2008 Universität Mannheim Lehrstuhl Praktische Informatik IV Prof. Dr.
Structure-from-Motion. Christina Mundhenk Leo Sylvio Rüdian Marcel Kliemannel
 Structure-from-Motion Christina Mundhenk Leo Sylvio Rüdian Marcel Kliemannel Fahrplan Structure-from Motion Workflow mit SIFT & Bundle Adjustment mit SURE Probleme/ Grenzen Technik Metrik und Vergleich
Structure-from-Motion Christina Mundhenk Leo Sylvio Rüdian Marcel Kliemannel Fahrplan Structure-from Motion Workflow mit SIFT & Bundle Adjustment mit SURE Probleme/ Grenzen Technik Metrik und Vergleich
Betrachtung von Verfahren zur Posenbestimmung und Merkmalsexktraktion. Thorsten Jost INF-MA SR Wintersemester 2008/2009 1.
 Betrachtung von Verfahren zur Posenbestimmung und Merkmalsexktraktion Thorsten Jost INF-MA SR Wintersemester 2008/2009 1. Dezember 2008 Agenda Motivation Feature Detection SIFT MOPS SURF SLAM Monte Carlo
Betrachtung von Verfahren zur Posenbestimmung und Merkmalsexktraktion Thorsten Jost INF-MA SR Wintersemester 2008/2009 1. Dezember 2008 Agenda Motivation Feature Detection SIFT MOPS SURF SLAM Monte Carlo
Inhaltsbasierte Bildsuche. Matthias Spiller. 17. Dezember 2004
 Kantenbasierte Merkmale für die Bildsuche Inhaltsbasierte Bildsuche Matthias Spiller 17. Dezember 2004 Übersicht Übersicht Einleitung Was sind Kanten? Kantenrichtungs Histogramm Der Canny-Algorithmus Feature-Erzeugung
Kantenbasierte Merkmale für die Bildsuche Inhaltsbasierte Bildsuche Matthias Spiller 17. Dezember 2004 Übersicht Übersicht Einleitung Was sind Kanten? Kantenrichtungs Histogramm Der Canny-Algorithmus Feature-Erzeugung
Maschinelles Lernen: Neuronale Netze. Ideen der Informatik Kurt Mehlhorn
 Maschinelles Lernen: Neuronale Netze Ideen der Informatik Kurt Mehlhorn 16. Januar 2014 Übersicht Stand der Kunst im Bilderverstehen: Klassifizieren und Suchen Was ist ein Bild in Rohform? Biologische
Maschinelles Lernen: Neuronale Netze Ideen der Informatik Kurt Mehlhorn 16. Januar 2014 Übersicht Stand der Kunst im Bilderverstehen: Klassifizieren und Suchen Was ist ein Bild in Rohform? Biologische
Interaktive Lokalisierung durch Objekterkennung
 Bachelorarbeit Interaktive Lokalisierung durch Objekterkennung Adrian Batzill Albert-Ludwigs-Universität Freiburg im Breisgau Technische Fakultät Institut für Informatik Lehrstuhl für Algorithmen und Datenstrukturen
Bachelorarbeit Interaktive Lokalisierung durch Objekterkennung Adrian Batzill Albert-Ludwigs-Universität Freiburg im Breisgau Technische Fakultät Institut für Informatik Lehrstuhl für Algorithmen und Datenstrukturen
Maschinelles Lernen: Neuronale Netze. Ideen der Informatik
 Maschinelles Lernen: Neuronale Netze Ideen der Informatik Kurt Mehlhorn Adrian Neumann 16. Januar 2014 Übersicht Biologische Inspiration Stand der Kunst in Objekterkennung auf Bildern Künstliche Neuronale
Maschinelles Lernen: Neuronale Netze Ideen der Informatik Kurt Mehlhorn Adrian Neumann 16. Januar 2014 Übersicht Biologische Inspiration Stand der Kunst in Objekterkennung auf Bildern Künstliche Neuronale
ifp Übersicht über Ansätze zur automatischen Objektrekonstruktion aus Punktwolken Institut für Photogrammetrie Universität Stuttgart
 Institut für Photogrammetrie Übersicht über Ansätze zur automatischen Objektrekonstruktion aus Punktwolken Dr.-Ing. Jan Böhm Institut für Photogrammetrie Universität Stuttgart 2 Überblick Oberflächen-Rekonstruktion
Institut für Photogrammetrie Übersicht über Ansätze zur automatischen Objektrekonstruktion aus Punktwolken Dr.-Ing. Jan Böhm Institut für Photogrammetrie Universität Stuttgart 2 Überblick Oberflächen-Rekonstruktion
Kapitel 2: Mathematische Grundlagen
 [ Computeranimation ] Kapitel 2: Mathematische Grundlagen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 2. Mathematische Grundlagen
[ Computeranimation ] Kapitel 2: Mathematische Grundlagen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 2. Mathematische Grundlagen
Bildverarbeitung Herbstsemester 2012. Kanten und Ecken
 Bildverarbeitung Herbstsemester 01 Kanten und Ecken 1 Inhalt Einführung Kantendetektierung Gradientenbasierende Verfahren Verfahren basierend auf der zweiten Ableitung Eckpunkterkennung Harris Corner Detector
Bildverarbeitung Herbstsemester 01 Kanten und Ecken 1 Inhalt Einführung Kantendetektierung Gradientenbasierende Verfahren Verfahren basierend auf der zweiten Ableitung Eckpunkterkennung Harris Corner Detector
Quadratische Formen und Definitheit
 Universität Basel Wirtschaftswissenschaftliches Zentrum Quadratische Formen und Definitheit Dr. Thomas Zehrt Inhalt: 1. Quadratische Formen 2. Quadratische Approximation von Funktionen 3. Definitheit von
Universität Basel Wirtschaftswissenschaftliches Zentrum Quadratische Formen und Definitheit Dr. Thomas Zehrt Inhalt: 1. Quadratische Formen 2. Quadratische Approximation von Funktionen 3. Definitheit von
Grundlagen: Bildbearbeitung / Objekterkennung. Julia Peterwitz zum Seminar: Videobasierte Erkennung und Analyse menschlicher Aktionen
 Grundlagen: Bildbearbeitung / Objekterkennung Julia Peterwitz zum Seminar: Videobasierte Erkennung und Analyse menschlicher Aktionen Videoerkennung! Warum? Live-Übertragung von Veranstaltungen Überwachung
Grundlagen: Bildbearbeitung / Objekterkennung Julia Peterwitz zum Seminar: Videobasierte Erkennung und Analyse menschlicher Aktionen Videoerkennung! Warum? Live-Übertragung von Veranstaltungen Überwachung
Vortrag DI Martin OBERZAUCHER TU Wien 06.05.2014 15:30-15:50
 Vortrag DI Martin OBERZAUCHER TU Wien 06.05.2014 15:30-15:50 Laserscan Modewort oder Wunderwaffe? Laserscanning Wunderwaffe oder Modewort Die 3D-Messtechnologien der BIM-Vermesser DI Martin Oberzaucher
Vortrag DI Martin OBERZAUCHER TU Wien 06.05.2014 15:30-15:50 Laserscan Modewort oder Wunderwaffe? Laserscanning Wunderwaffe oder Modewort Die 3D-Messtechnologien der BIM-Vermesser DI Martin Oberzaucher
High Level-Synthese eines Keypoint-Detection- Algorithmus für FPGAs
 Fakultät Informatik, Institut für Technische Informatik, Professur für VLSI-Entwurfssysteme, Diagnostik und Architektur Belegarbeit High Level-Synthese eines Keypoint-Detection- Algorithmus für FPGAs Max
Fakultät Informatik, Institut für Technische Informatik, Professur für VLSI-Entwurfssysteme, Diagnostik und Architektur Belegarbeit High Level-Synthese eines Keypoint-Detection- Algorithmus für FPGAs Max
3 Optimierung mehrdimensionaler Funktionen f : R n R
 3 Optimierung mehrdimensionaler Funktionen f : R n R 31 Optimierung ohne Nebenbedingungen Optimierung heißt eigentlich: Wir suchen ein x R n so, dass f(x ) f(x) für alle x R n (dann heißt x globales Minimum)
3 Optimierung mehrdimensionaler Funktionen f : R n R 31 Optimierung ohne Nebenbedingungen Optimierung heißt eigentlich: Wir suchen ein x R n so, dass f(x ) f(x) für alle x R n (dann heißt x globales Minimum)
Terrestrisches Laserscanning Ein allgemeiner Überblick über Messmethoden und Einsatzmöglichkeiten in der Geomatik. Hans-Martin Zogg, ETH Zürich
 Terrestrisches Laserscanning Ein allgemeiner Überblick über Messmethoden und Einsatzmöglichkeiten in der Geomatik Hans-Martin Zogg, ETH Zürich 2 Inhalt Terrestrisches Laserscanning Klassifizierung von
Terrestrisches Laserscanning Ein allgemeiner Überblick über Messmethoden und Einsatzmöglichkeiten in der Geomatik Hans-Martin Zogg, ETH Zürich 2 Inhalt Terrestrisches Laserscanning Klassifizierung von
3D-Transformationen. Kapitel Translation Skalierung
 Kapitel 13 3D-Transformationen Wie im weidimensionalen Fall, werden die Definitionspunkte der Objekte als Spaltenvektoren mit homogener Koordinate geschrieben. Die notwendigen Transformationen werden wieder
Kapitel 13 3D-Transformationen Wie im weidimensionalen Fall, werden die Definitionspunkte der Objekte als Spaltenvektoren mit homogener Koordinate geschrieben. Die notwendigen Transformationen werden wieder
Industrielle Bildverarbeitung mit OpenCV
 Industrielle Bildverarbeitung mit OpenCV Zhang,Duoyi 6.7.2 Gliederung. Einführung für OpenCV 2. Die Struktur von OpenCV Überblick Funktionsumfang in Ausschnitten mit Beispielen 3. Industrielles Anwendungsbeispiel
Industrielle Bildverarbeitung mit OpenCV Zhang,Duoyi 6.7.2 Gliederung. Einführung für OpenCV 2. Die Struktur von OpenCV Überblick Funktionsumfang in Ausschnitten mit Beispielen 3. Industrielles Anwendungsbeispiel
Masterarbeit. Studiengang Informatik. Dipl.-Inf. (FH) Michael Schäferling
 Michael Schäferling") Masterarbeit Studiengang Informatik Dipl.-Inf. (FH) Michael Schäferling Entwurf eines FPGA-basierten Systems zur Merkmalsextraktion für optische Trackingverfahren. Erstprüfer: Prof. Dr. Gundolf Kiefer
Masterarbeit Studiengang Informatik Dipl.-Inf. (FH) Michael Schäferling Entwurf eines FPGA-basierten Systems zur Merkmalsextraktion für optische Trackingverfahren. Erstprüfer: Prof. Dr. Gundolf Kiefer
Vergleichende Genauigkeitsuntersuchungen der neuesten Generation terrestrischer Laserscanner
 Klaus Mechelke, Thomas Kersten, Maren Lindstaedt Vergleichende Genauigkeitsuntersuchungen der neuesten Generation terrestrischer Laserscanner Überblick Einführung Untersuchte Systeme Geometrische Untersuchungen
Klaus Mechelke, Thomas Kersten, Maren Lindstaedt Vergleichende Genauigkeitsuntersuchungen der neuesten Generation terrestrischer Laserscanner Überblick Einführung Untersuchte Systeme Geometrische Untersuchungen
'Visual Hull' mit Hilfe von Spiegeln
 'Visual Hull' mit Hilfe von Spiegeln hwww.dip.ee.uct.ac.za/~kforbes/doublemirror/doublemirror.html Dreidimensionales Computersehen Dr.-Ing. Simon Winkelbach www.rob.cs.tu-bs.de/teaching/courses/cs 1 Zur
'Visual Hull' mit Hilfe von Spiegeln hwww.dip.ee.uct.ac.za/~kforbes/doublemirror/doublemirror.html Dreidimensionales Computersehen Dr.-Ing. Simon Winkelbach www.rob.cs.tu-bs.de/teaching/courses/cs 1 Zur
Triangulierungen und Kartographie
 Triangulierungen und Kartographie Ein Einblick in geometrische und topologische Methoden Stefan Krauss, Clara Löh Fakultät für Mathematik, Universität Regensburg, 93040 Regensburg 23. Juli 2014 Was verraten
Triangulierungen und Kartographie Ein Einblick in geometrische und topologische Methoden Stefan Krauss, Clara Löh Fakultät für Mathematik, Universität Regensburg, 93040 Regensburg 23. Juli 2014 Was verraten
Modellbasierte Diagnosesysteme
 Modellbasierte Diagnosesysteme Diagnose: Identifikation eines vorliegenden Fehlers (Krankheit) auf der Basis von Beobachtungen (Symptomen) und Hintergrundwissen über das System 2 Arten von Diagnosesystemen:
Modellbasierte Diagnosesysteme Diagnose: Identifikation eines vorliegenden Fehlers (Krankheit) auf der Basis von Beobachtungen (Symptomen) und Hintergrundwissen über das System 2 Arten von Diagnosesystemen:
INTELLIGENTE DATENANALYSE IN MATLAB. Objekterkennung
 INTELLIGENTE DATENANALYSE IN MATLAB Objekterkennung Objekterkennung Problemstellung Gegeben: Ein Bild. Fragestellungen: Klassifikationsproblem Ist ein bestimmtes Objekt (z.b. Flugzeug) auf dem Bild? Welches
INTELLIGENTE DATENANALYSE IN MATLAB Objekterkennung Objekterkennung Problemstellung Gegeben: Ein Bild. Fragestellungen: Klassifikationsproblem Ist ein bestimmtes Objekt (z.b. Flugzeug) auf dem Bild? Welches
Anwendungen der Hauptkomponentenanalyse. Volker Tresp vertreten durch Florian Steinke
 Anwendungen der Hauptkomponentenanalyse Volker Tresp vertreten durch Florian Steinke 1 Dimensionsreduktion für Supervised Learning 2 Beispiel: Kaufentscheidung 3 Verbesserte Abstandsmaße durch Hauptkomponentenanalyse
Anwendungen der Hauptkomponentenanalyse Volker Tresp vertreten durch Florian Steinke 1 Dimensionsreduktion für Supervised Learning 2 Beispiel: Kaufentscheidung 3 Verbesserte Abstandsmaße durch Hauptkomponentenanalyse
Aufgabe des Monats Januar 2012
 Aufgabe des Monats Januar 2012 Ein Unternehmen stellt Kaffeemaschinen her, für die es jeweils einen Preis von 100 Euro (p = 100) verlangt. Die damit verbundene Kostenfunktion ist gegeben durch: C = 5q
Aufgabe des Monats Januar 2012 Ein Unternehmen stellt Kaffeemaschinen her, für die es jeweils einen Preis von 100 Euro (p = 100) verlangt. Die damit verbundene Kostenfunktion ist gegeben durch: C = 5q
Morphologische Operationen (12 Punkte)
") 05.10.2015 186.822 VU Einführung in Visual Computing 3. Test Gruppe A Matrikelnummer: Nachname: Punkte Studienkennzahl: Vorname: Bitte tragen sie Ihre Matrikelnummer, Studienkennzahl sowie Vor- und Nachname
05.10.2015 186.822 VU Einführung in Visual Computing 3. Test Gruppe A Matrikelnummer: Nachname: Punkte Studienkennzahl: Vorname: Bitte tragen sie Ihre Matrikelnummer, Studienkennzahl sowie Vor- und Nachname
Anleitung für die Bearbeitungssoftware Gwyddion
 Anleitung für die Bearbeitungssoftware Gwyddion Abbildung 1: Bearbeitete Aufnahme einer CD erstellt von Daniela Feigl Karlsruhe, den 30. November 2012 II Inhaltsverzeichnis 1 Herunterladen 1 2 Önen 1 3
Anleitung für die Bearbeitungssoftware Gwyddion Abbildung 1: Bearbeitete Aufnahme einer CD erstellt von Daniela Feigl Karlsruhe, den 30. November 2012 II Inhaltsverzeichnis 1 Herunterladen 1 2 Önen 1 3
Koordinatensysteme und GPS
 Koordinatensysteme und GPS Koordinatensysteme und GPS Koordinatensysteme: Definition Ein Koordinatensystem ist ein Bezugssystem, mit dem die Positionen von geographischen Features, Bildern und Beobachtungen,
Koordinatensysteme und GPS Koordinatensysteme und GPS Koordinatensysteme: Definition Ein Koordinatensystem ist ein Bezugssystem, mit dem die Positionen von geographischen Features, Bildern und Beobachtungen,
Panoramabilderzeugung - ausgewählte Projektionen
 Panoramabilderzeugung - ausgewählte Projektionen Sebastian Bauer 8. Juni 2011 Arbeitsgruppe Computergrak Computergrak, Institut für Informatik Martin-Luther-Universität Halle-Wittenberg http://informatik.uni-halle.de/arbeitsgruppen/computergrafik/
Panoramabilderzeugung - ausgewählte Projektionen Sebastian Bauer 8. Juni 2011 Arbeitsgruppe Computergrak Computergrak, Institut für Informatik Martin-Luther-Universität Halle-Wittenberg http://informatik.uni-halle.de/arbeitsgruppen/computergrafik/
Digitale Bildverarbeitung (DBV)
") Digitale Bildverarbeitung (DBV) Prof. Dr. Ing. Heinz Jürgen Przybilla Labor für Photogrammetrie Email: heinz juergen.przybilla@hs bochum.de Tel. 0234 32 10517 Sprechstunde: Montags 13 14 Uhr und nach Vereinbarung
Digitale Bildverarbeitung (DBV) Prof. Dr. Ing. Heinz Jürgen Przybilla Labor für Photogrammetrie Email: heinz juergen.przybilla@hs bochum.de Tel. 0234 32 10517 Sprechstunde: Montags 13 14 Uhr und nach Vereinbarung
Semantische 3D-Karten für mobile Roboter. Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring 1 28759 Bremen
 Semantische 3D-Karten für mobile Roboter Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring 1 28759 Bremen Danksagung Für erfolgreiche Zusammenarbeit in den letzten Jahren mit Joachim Hertzberg
Semantische 3D-Karten für mobile Roboter Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring 1 28759 Bremen Danksagung Für erfolgreiche Zusammenarbeit in den letzten Jahren mit Joachim Hertzberg
Computergrafik 2: Objekt-/Bilderkennung
 Computergrafik 2: Objekt-/Bilderkennung Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Objekt-/Bilderkennung Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Verfahren zur autonomen bildgestützten Navigation
 Verfahren zur autonomen bildgestützten Navigation DGLR Workshop, 14. - 15.2.2007 Führungsaspekte unbemannter Luftfahrzeuge: Technologien und die Einbeziehung des Operateurs N. Schweyer, MBDA LFK-Lenkflugkörpersysteme
Verfahren zur autonomen bildgestützten Navigation DGLR Workshop, 14. - 15.2.2007 Führungsaspekte unbemannter Luftfahrzeuge: Technologien und die Einbeziehung des Operateurs N. Schweyer, MBDA LFK-Lenkflugkörpersysteme
K-SCAN SOFTWARE FÜR C-BILD-AUFNAHME UND - VERARBEITUNG
 SOFTWARE FÜR C-BILD-AUFNAHME UND - MODUL PRÜFVORBEREITUNG In dem Modul Prüfvorbereitung werden die Parameter für die Scanner-Steuerung und die Datenaufnahme festgelegt. In der angebotenen Version kann
SOFTWARE FÜR C-BILD-AUFNAHME UND - MODUL PRÜFVORBEREITUNG In dem Modul Prüfvorbereitung werden die Parameter für die Scanner-Steuerung und die Datenaufnahme festgelegt. In der angebotenen Version kann
Computergrafik 2: Objekt-/Bilderkennung
 Computergrafik 2: Objekt-/Bilderkennung Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Computergrafik 2: Objekt-/Bilderkennung Prof. Dr. Michael Rohs, Dipl.-Inform. Sven Kratz michael.rohs@ifi.lmu.de MHCI Lab, LMU München Folien teilweise von Andreas Butz, sowie von Klaus D. Tönnies (Grundlagen
Entwurf und Erkennung von codierten Zielmarken
 Photogrammetrie Seminarvortrag: Entwurf und Erkennung von codierten Zielmarken Übersicht: 1. Einleitung 2. Codeanforderungen 3. Aufbau der Zielmarke Teil I 4. Der Code 5. Automatische Detektion und Erkennung
Photogrammetrie Seminarvortrag: Entwurf und Erkennung von codierten Zielmarken Übersicht: 1. Einleitung 2. Codeanforderungen 3. Aufbau der Zielmarke Teil I 4. Der Code 5. Automatische Detektion und Erkennung
Musterlösung zu den Übungen zur Vorlesung Mathematik für Physiker II. x 2
 Musterlösung zu den Übungen zur Vorlesung Mathematik für Physiker II Wiederholungsblatt: Analysis Sommersemester 2011 W. Werner, F. Springer erstellt von: Max Brinkmann Aufgabe 1: Untersuchen Sie, ob die
Musterlösung zu den Übungen zur Vorlesung Mathematik für Physiker II Wiederholungsblatt: Analysis Sommersemester 2011 W. Werner, F. Springer erstellt von: Max Brinkmann Aufgabe 1: Untersuchen Sie, ob die
Lokale Beleuchtungsmodelle
 Lokale Beleuchtungsmodelle Oliver Deussen Lokale Modelle 1 Farbschattierung der Oberflächen abhängig von: Position, Orientierung und Charakteristik der Oberfläche Lichtquelle Vorgehensweise: 1. Modell
Lokale Beleuchtungsmodelle Oliver Deussen Lokale Modelle 1 Farbschattierung der Oberflächen abhängig von: Position, Orientierung und Charakteristik der Oberfläche Lichtquelle Vorgehensweise: 1. Modell
6.2 Eine Vorlage schärfen
 6.2 Eine Vorlage schärfen SilverFast hat eine speziell entwickelte Schärfefunktion, die sogenannte Unschärfe-Maske (USM). Dieser Begriff kommt aus der traditionellen Lithographie, als noch chemisch gearbeitet
6.2 Eine Vorlage schärfen SilverFast hat eine speziell entwickelte Schärfefunktion, die sogenannte Unschärfe-Maske (USM). Dieser Begriff kommt aus der traditionellen Lithographie, als noch chemisch gearbeitet
SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE. www.scan-go.eu www.shop.laserscanning-europe.com V.02.2014
 SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE V.02.2014 www.scan-go.eu www.shop.laserscanning-europe.com SCAN&GO SYSTEM (PATENTRECHTLICH GESCHÜTZT) DIE NEUE VERMESSUNGSTECHNOLOGIE Scan&Go ist eine neue Methode
SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE V.02.2014 www.scan-go.eu www.shop.laserscanning-europe.com SCAN&GO SYSTEM (PATENTRECHTLICH GESCHÜTZT) DIE NEUE VERMESSUNGSTECHNOLOGIE Scan&Go ist eine neue Methode
Untersuchung zur Genauigkeit der Kamerakalibrierung über Merkmalspunkte in SfM-Werkzeugen
 1 Untersuchung zur Genauigkeit der Kamerakalibrierung über Merkmalspunkte in SfM-Werkzeugen Matthias SOOT, Marc SCHULZE und Christian MULSOW Zusammenfassung Im Bereich der Photogrammetrie werden Kameras
1 Untersuchung zur Genauigkeit der Kamerakalibrierung über Merkmalspunkte in SfM-Werkzeugen Matthias SOOT, Marc SCHULZE und Christian MULSOW Zusammenfassung Im Bereich der Photogrammetrie werden Kameras
Seminar. Visual Computing. Poisson Surface Reconstruction. Peter Hagemann Andreas Meyer. Peter Eisert: Visual Computing SS 11.
 Poisson Surface Reconstruction Peter Hagemann Andreas Meyer Seminar 1 Peter Eisert: SS 11 Motivation Zur 3D Darstellung von Objekten werden meist Scan-Daten erstellt Erstellung eines Dreieckmodells aus
Poisson Surface Reconstruction Peter Hagemann Andreas Meyer Seminar 1 Peter Eisert: SS 11 Motivation Zur 3D Darstellung von Objekten werden meist Scan-Daten erstellt Erstellung eines Dreieckmodells aus
9 Optimierung mehrdimensionaler reeller Funktionen f : R n R
 9 Optimierung mehrdimensionaler reeller Funktionen f : R n R 91 Optimierung ohne Nebenbedingungen Ein Optimum zu suchen heißt, den größten oder den kleinsten Wert zu suchen Wir suchen also ein x R n, sodass
9 Optimierung mehrdimensionaler reeller Funktionen f : R n R 91 Optimierung ohne Nebenbedingungen Ein Optimum zu suchen heißt, den größten oder den kleinsten Wert zu suchen Wir suchen also ein x R n, sodass
Debayeringverfahren. 19. Mai Thomas Noack, Nikolai Kosjar. SE Computational Photography - Debayeringverfahren
 Debayeringverfahren Thomas Noack, Nikolai Kosjar 19. Mai 2010 Was bisher geschah... Reduktion der Herstellungskosten durch Einsatz von nur noch einem CCD-Sensor mit Bayer-Filter Problem: Bayer Image Full
Debayeringverfahren Thomas Noack, Nikolai Kosjar 19. Mai 2010 Was bisher geschah... Reduktion der Herstellungskosten durch Einsatz von nur noch einem CCD-Sensor mit Bayer-Filter Problem: Bayer Image Full
ANIMATION - GRUNDLAGEN
 ANIMATION - GRUNDLAGEN Bei CAD-Programmen gibt es meist folgende Verfahren zur Erzeugung von : Festlegung von Schlüsselszenen, aus denen das Programm automatisch Zwischenbilder generiert ( Keyframing )
ANIMATION - GRUNDLAGEN Bei CAD-Programmen gibt es meist folgende Verfahren zur Erzeugung von : Festlegung von Schlüsselszenen, aus denen das Programm automatisch Zwischenbilder generiert ( Keyframing )
Lineare Algebra und Geometrie für Ingenieure
 Lineare Algebra und Geometrie für Ingenieure Eine, anwendungsbezogene Einführung mit Übungen Prof. Dr. Manfred Andrie Dipl.-Ing. Paul Meier 3. Auflage VER^G Inhaltsverzeichnis MENGEN 1 Grundbegriffe 13
Lineare Algebra und Geometrie für Ingenieure Eine, anwendungsbezogene Einführung mit Übungen Prof. Dr. Manfred Andrie Dipl.-Ing. Paul Meier 3. Auflage VER^G Inhaltsverzeichnis MENGEN 1 Grundbegriffe 13
UNIVERSITÄT DES SAARLANDES PfflLOSOPHISCHE FAKULTÄT HI EMPIRISCHE HUMANWISSENSCHAFTEN
 UNIVERSITÄT DES SAARLANDES PfflLOSOPHISCHE FAKULTÄT HI EMPIRISCHE HUMANWISSENSCHAFTEN Automatische Klassifizierung von deutschsprachigen elektronischen Katalogen der Elektroindustrie nach dem Elektrotechnischen
UNIVERSITÄT DES SAARLANDES PfflLOSOPHISCHE FAKULTÄT HI EMPIRISCHE HUMANWISSENSCHAFTEN Automatische Klassifizierung von deutschsprachigen elektronischen Katalogen der Elektroindustrie nach dem Elektrotechnischen
Wie findet das Navi den Weg?
 0.05.0 Verwandte Fragestellungen Problemstellungen aus der Praxis Prof. Dr. Paul Rawiel Gliederung des Vortrags Speicherung von Kartendaten zur Navigation Kriterien für die Navigation Finden des kürzesten
0.05.0 Verwandte Fragestellungen Problemstellungen aus der Praxis Prof. Dr. Paul Rawiel Gliederung des Vortrags Speicherung von Kartendaten zur Navigation Kriterien für die Navigation Finden des kürzesten
Elementare Bildverarbeitungsoperationen
 1 Elementare Bildverarbeitungsoperationen - Kantenerkennung - 1 Einführung 2 Gradientenverfahren 3 Laplace-Verfahren 4 Canny-Verfahren 5 Literatur 1 Einführung 2 1 Einführung Kantenerkennung basiert auf
1 Elementare Bildverarbeitungsoperationen - Kantenerkennung - 1 Einführung 2 Gradientenverfahren 3 Laplace-Verfahren 4 Canny-Verfahren 5 Literatur 1 Einführung 2 1 Einführung Kantenerkennung basiert auf
Bildwinkel & Auflösung
 Whitepaper HD-Kameras Bildwinkel & Auflösung Box-Kameras DF4510HD DF4910HD DF4910HD-DN DF4920HD-DN Dome-Kameras DDF4510HDV DDF4910HDV DDF4910HDV-DN DDF4820HDV-DN DDF4920HDV-DN IR-Kameras DF4910HD-DN/IR
Whitepaper HD-Kameras Bildwinkel & Auflösung Box-Kameras DF4510HD DF4910HD DF4910HD-DN DF4920HD-DN Dome-Kameras DDF4510HDV DDF4910HDV DDF4910HDV-DN DDF4820HDV-DN DDF4920HDV-DN IR-Kameras DF4910HD-DN/IR
Automatische Verfahren zur Verknüpfung von Punktwolken
 Automatische Verfahren zur Verknüpfung von Punktwolken Dr.-Ing. Christian Hesse 16.06.2009 3. Hamburger Anwenderforum Terrestrisches Laserscanning 1 Inhalt Einleitung Ansätze zur automatischen Registrierung
Automatische Verfahren zur Verknüpfung von Punktwolken Dr.-Ing. Christian Hesse 16.06.2009 3. Hamburger Anwenderforum Terrestrisches Laserscanning 1 Inhalt Einleitung Ansätze zur automatischen Registrierung
Bachelorarbeit. Peter Oltmann. 3D-Lagebestimmung von Objekten für Assistenzroboter. Fakultät Technik und Informatik Studiendepartment Informatik
 Bachelorarbeit Peter Oltmann 3D-Lagebestimmung von Objekten für Assistenzroboter Fakultät Technik und Informatik Studiendepartment Informatik Faculty of Engineering and Computer Science Department of Computer
Bachelorarbeit Peter Oltmann 3D-Lagebestimmung von Objekten für Assistenzroboter Fakultät Technik und Informatik Studiendepartment Informatik Faculty of Engineering and Computer Science Department of Computer
Telematik trifft Geomatik
 B der Welt in 3D Die Vermessung Telematik trifft Geomatik Bild: Riegl Prof. Dr. Andreas Nüchter Was ist Telematik? Die Telematik integriert interdisziplinär Methoden der Telekommunikation, der Automatisierungs-technik
B der Welt in 3D Die Vermessung Telematik trifft Geomatik Bild: Riegl Prof. Dr. Andreas Nüchter Was ist Telematik? Die Telematik integriert interdisziplinär Methoden der Telekommunikation, der Automatisierungs-technik
Lösung Matura 6J und 6K (2007)
") O. Riesen Kantonsschule Zug Lösung Matura 6J und 6K (007) Aufgabe a) Definiere die Funktion. D = R, Symmetrie: gerade Funktion, Asymptote y = 0 keine Nullstelle, Maximum (0 ½), Wendepunkte ( ± e ) Funktionsgraph:
O. Riesen Kantonsschule Zug Lösung Matura 6J und 6K (007) Aufgabe a) Definiere die Funktion. D = R, Symmetrie: gerade Funktion, Asymptote y = 0 keine Nullstelle, Maximum (0 ½), Wendepunkte ( ± e ) Funktionsgraph:
Grundlagen der Strömungsmechanik
 Franz Durst Grundlagen der Strömungsmechanik Eine Einführung in die Theorie der Strömungen von Fluiden Mit 349 Abbildungen, davon 8 farbig QA Springer Inhaltsverzeichnis Bedeutung und Entwicklung der Strömungsmechanik
Franz Durst Grundlagen der Strömungsmechanik Eine Einführung in die Theorie der Strömungen von Fluiden Mit 349 Abbildungen, davon 8 farbig QA Springer Inhaltsverzeichnis Bedeutung und Entwicklung der Strömungsmechanik
Lineare Algebra II, Lösungshinweise Blatt 9
 Prof Dr Katrin Wendland Priv Doz Dr Katrin Leschke Christoph Tinkl SS 27 Lineare Algebra II, Lösungshinweise Blatt 9 Aufgabe (4 Punkte) Sei 2 3 4 A = 5 6 Berechnen Sie A k für alle k N und verifizieren
Prof Dr Katrin Wendland Priv Doz Dr Katrin Leschke Christoph Tinkl SS 27 Lineare Algebra II, Lösungshinweise Blatt 9 Aufgabe (4 Punkte) Sei 2 3 4 A = 5 6 Berechnen Sie A k für alle k N und verifizieren
Projektionssysteme und Bezugsrahmen der Gegenwart
 armasuisse Projektionssysteme und Bezugsrahmen der Gegenwart geosuisse nordwest "Leonhard Euler als Geograph" Urs Marti, Basel, 7. November 2007 Inhalt Historischer Überblick Generelles zu Projektionen
armasuisse Projektionssysteme und Bezugsrahmen der Gegenwart geosuisse nordwest "Leonhard Euler als Geograph" Urs Marti, Basel, 7. November 2007 Inhalt Historischer Überblick Generelles zu Projektionen
Ein Punkt pro Kubikmeter präzise Registrierung terrestrischer Laserscans mit Scanmatching
 1 Ein Punkt pro Kubikmeter präzise Registrierung terrestrischer Laserscans mit Scanmatching Dorit BORRMANN, Jan ELSEBERG, Prashant Narayan KC, Andreas NÜCHTER Zusammenfassung Die präzise Registrierung
1 Ein Punkt pro Kubikmeter präzise Registrierung terrestrischer Laserscans mit Scanmatching Dorit BORRMANN, Jan ELSEBERG, Prashant Narayan KC, Andreas NÜCHTER Zusammenfassung Die präzise Registrierung
Computergraphik I. Scan Conversion: Lines & Co. Einordnung in die Pipeline. G. Zachmann Clausthal University, Germany zach@tu-clausthal.
 11/4/10 lausthal omputergraphik I Scan onversion of Lines. Zachmann lausthal University, ermany zach@tu-clausthal.de Einordnung in die Pipeline Rasterisierung der Objekte in Pixel Ecken-Werte interpolieren
11/4/10 lausthal omputergraphik I Scan onversion of Lines. Zachmann lausthal University, ermany zach@tu-clausthal.de Einordnung in die Pipeline Rasterisierung der Objekte in Pixel Ecken-Werte interpolieren
IGS Enkenbach-Alsenborn MINT Abend 22. Mai 2015. Multicopter, Roboter und Co.
 IGS Enkenbach-Alsenborn MINT Abend 22. Mai 2015 Multicopter, Roboter und Co. Prof. Dr.-Ing. Gerd Bitsch Hochschule Kaiserslautern (und Fraunhofer ITWM) www.hs-kl.de Inhalt Wie funktioniert ein Quadro-
IGS Enkenbach-Alsenborn MINT Abend 22. Mai 2015 Multicopter, Roboter und Co. Prof. Dr.-Ing. Gerd Bitsch Hochschule Kaiserslautern (und Fraunhofer ITWM) www.hs-kl.de Inhalt Wie funktioniert ein Quadro-
Bildregistrierung von 3D-Laserscans und Bildern für Wadi Sura
 Diplomarbeit Bildregistrierung von 3D-Laserscans und Bildern für Wadi Sura vorlegt dem Fachbereich Mathematik und Informatik der Freien Universität Berlin Takustr. 9, 14195 Berlin Diplomand: Christopher
Diplomarbeit Bildregistrierung von 3D-Laserscans und Bildern für Wadi Sura vorlegt dem Fachbereich Mathematik und Informatik der Freien Universität Berlin Takustr. 9, 14195 Berlin Diplomand: Christopher
Nichtrealistische Darstellung von Gebirgen mit OpenGL
 Nichtrealistische Darstellung von Gebirgen mit OpenGL Großer Beleg Torsten Keil Betreuer: Prof. Deussen Zielstellung Entwicklung eines Algorithmus, der die 3D- Daten einer Geometrie in eine nichtrealistische
Nichtrealistische Darstellung von Gebirgen mit OpenGL Großer Beleg Torsten Keil Betreuer: Prof. Deussen Zielstellung Entwicklung eines Algorithmus, der die 3D- Daten einer Geometrie in eine nichtrealistische
Digitale Bildverarbeitung Einheit 8 Lineare Filterung
 Digitale Bildverarbeitung Einheit 8 Lineare Filterung Lehrauftrag SS 2008 Fachbereich M+I der FH-Offenburg Dr. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Verstehen, wie lineare
Digitale Bildverarbeitung Einheit 8 Lineare Filterung Lehrauftrag SS 2008 Fachbereich M+I der FH-Offenburg Dr. Bernard Haasdonk Albert-Ludwigs-Universität Freiburg Ziele der Einheit Verstehen, wie lineare
Lehrstuhl für Wirtschaftsinformatik im Dienstleistungsbereich
 WI 2013, Leipzig, Deutschland Automatische Rekonstruktion eines 3D Körpermodells aus Kinect Sensordaten, Jochen Süßmuth, Freimut Bodendorf Agenda Motivation Methode Ausblick 2 Problemstellung Onlineshopping
WI 2013, Leipzig, Deutschland Automatische Rekonstruktion eines 3D Körpermodells aus Kinect Sensordaten, Jochen Süßmuth, Freimut Bodendorf Agenda Motivation Methode Ausblick 2 Problemstellung Onlineshopping
Lösungen. S. 167 Nr. 6. S. 167 Nr. 8. S.167 Nr.9
 Lösungen S. 167 Nr. 6 Schätzung: Es können ca. 5000 Haushaltstanks gefüllt werden. Man beachte die Dimensionen der Tanks: Der Haushaltstank passt in ein kleines Zimmer, der große Öltank besitzt jedoch
Lösungen S. 167 Nr. 6 Schätzung: Es können ca. 5000 Haushaltstanks gefüllt werden. Man beachte die Dimensionen der Tanks: Der Haushaltstank passt in ein kleines Zimmer, der große Öltank besitzt jedoch
Erzeugung und Auswertung dynamischer 3D Geländemodelle durch Kombination von Laserscanner und GNSS Daten an Tagebaugroßgeräten
 Erzeugung und Auswertung dynamischer 3D Geländemodelle durch Kombination von Laserscanner und GNSS Daten an Tagebaugroßgeräten Dr. Frank Elandaloussi 10.11.2009, Laserscanning Europe Konferenz, Magdeburg
Erzeugung und Auswertung dynamischer 3D Geländemodelle durch Kombination von Laserscanner und GNSS Daten an Tagebaugroßgeräten Dr. Frank Elandaloussi 10.11.2009, Laserscanning Europe Konferenz, Magdeburg
INTELLIGENTE DATENANALYSE IN MATLAB
 INTELLIGENTE DATENANALYSE IN MATLAB Bildanalyse Literatur David A. Forsyth: Computer Vision i A Modern Approach. Mark S. Nixon und Alberto S. Aguado: Feature Extraction and Image Processing. Ulrich Schwanecke:
INTELLIGENTE DATENANALYSE IN MATLAB Bildanalyse Literatur David A. Forsyth: Computer Vision i A Modern Approach. Mark S. Nixon und Alberto S. Aguado: Feature Extraction and Image Processing. Ulrich Schwanecke:
Lineare Algebra II 6. Übungsblatt
 Lineare Algebra II 6 Übungsblatt Fachbereich Mathematik SS 2011 Prof Dr Kollross 18/19 Mai 2011 Susanne Kürsten Tristan Alex Gruppenübung Aufgabe G1 (Minimalpolynom) Bestimmen Sie das Minimalpolynom der
Lineare Algebra II 6 Übungsblatt Fachbereich Mathematik SS 2011 Prof Dr Kollross 18/19 Mai 2011 Susanne Kürsten Tristan Alex Gruppenübung Aufgabe G1 (Minimalpolynom) Bestimmen Sie das Minimalpolynom der
Statistik, Datenanalyse und Simulation
 Dr. Michael O. Distler distler@kph.uni-mainz.de Mainz, 12. Juli 2011 Gesichtserkennung Begriffsunterscheidung: Lokalisation eines Gesichts im Bild Zuordnung des Gesichts zu einer bestimmten Person Technische
Dr. Michael O. Distler distler@kph.uni-mainz.de Mainz, 12. Juli 2011 Gesichtserkennung Begriffsunterscheidung: Lokalisation eines Gesichts im Bild Zuordnung des Gesichts zu einer bestimmten Person Technische
3D-Rekonstruktion aus monokularen Bilderserien
 Fachbereich 4: Informatik 3D-Rekonstruktion aus monokularen Bilderserien Bachelorarbeit zur Erlangung des Grades Bachelor of Science im Studiengang Computervisualistik vorgelegt von Stephan Manthe Betreuer:
Fachbereich 4: Informatik 3D-Rekonstruktion aus monokularen Bilderserien Bachelorarbeit zur Erlangung des Grades Bachelor of Science im Studiengang Computervisualistik vorgelegt von Stephan Manthe Betreuer:
Überblick. Kapitel 7: Anwendungen der Differentialrechnung
 Überblick Kapitel 7: Anwendungen der Differentialrechnung 1 Beispiel 1: Kapitel 7.1: Implizites Differenzieren 1 Beispiel 1: Steigung der Tangente Kapitel 7.1: Implizites Differenzieren 2 Beispiel 1: Steigung
Überblick Kapitel 7: Anwendungen der Differentialrechnung 1 Beispiel 1: Kapitel 7.1: Implizites Differenzieren 1 Beispiel 1: Steigung der Tangente Kapitel 7.1: Implizites Differenzieren 2 Beispiel 1: Steigung
Hochpräzises 3D-Scannen von mobilen Plattformen aus. Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring 1 28759 Bremen 1
 Hochpräzises 3D-Scannen von mobilen Plattformen aus Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring 1 28759 Bremen 1 Danksagung Für erfolgreiche Zusammenarbeit in den letzten Jahren mit
Hochpräzises 3D-Scannen von mobilen Plattformen aus Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring 1 28759 Bremen 1 Danksagung Für erfolgreiche Zusammenarbeit in den letzten Jahren mit
Optimieren unter Nebenbedingungen
 Optimieren unter Nebenbedingungen Hier sucht man die lokalen Extrema einer Funktion f(x 1,, x n ) unter der Nebenbedingung dass g(x 1,, x n ) = 0 gilt Die Funktion f heißt Zielfunktion Beispiel: Gesucht
Optimieren unter Nebenbedingungen Hier sucht man die lokalen Extrema einer Funktion f(x 1,, x n ) unter der Nebenbedingung dass g(x 1,, x n ) = 0 gilt Die Funktion f heißt Zielfunktion Beispiel: Gesucht
(a) Zunächst benötigen wir zwei Richtungsvektoren der Ebene E; diese sind zum Beispiel gegeben durch die Vektoren
 Zunächst benötigen wir zwei Richtungsvektoren der Ebene E; diese sind zum Beispiel gegeben durch die Vektoren") Aufgabe Gegeben seien die Punkte A(,,, B(,,, C(,,. (a Geben Sie die Hesse-Normalform der Ebene E, welche die drei Punkte A, B und C enthält, an. (b Bestimmen Sie den Abstand des Punktes P (,, 5 zur Ebene
Aufgabe Gegeben seien die Punkte A(,,, B(,,, C(,,. (a Geben Sie die Hesse-Normalform der Ebene E, welche die drei Punkte A, B und C enthält, an. (b Bestimmen Sie den Abstand des Punktes P (,, 5 zur Ebene
Krümmungsapproximation auf 3D-Modellen
 Krümmungsapproximation auf 3D-Modellen Mathematische Grundlagen und Approximation Christian Cyrus Matrikelnummer 157707 Fakultät für Informatik Otto-von-Guericke-Universität Magdeburg Diese Ausarbeitung
Krümmungsapproximation auf 3D-Modellen Mathematische Grundlagen und Approximation Christian Cyrus Matrikelnummer 157707 Fakultät für Informatik Otto-von-Guericke-Universität Magdeburg Diese Ausarbeitung
STERNBURG BINGO STERNBURG BINGO UND SO FUNKTIONIERT S: MITMACHEN UND TOLLE PREISE GEWINNEN! RAUM FÜR EIGENE BEMERKUNGEN, GRÜSSE ETC.
 85 61 19 27 78 52 90 45 03 39 54 88 89 76 21 69 15 94 22 10 24 18 62 79 53 Aufschrift befindet sich eine neue -Zahl. Wenn Sie eine -Zahl aus dem obigen Sobald Sie eine Reihe von 5 - -Zahlen horizontal,
85 61 19 27 78 52 90 45 03 39 54 88 89 76 21 69 15 94 22 10 24 18 62 79 53 Aufschrift befindet sich eine neue -Zahl. Wenn Sie eine -Zahl aus dem obigen Sobald Sie eine Reihe von 5 - -Zahlen horizontal,
Jenseits von Mercator
 Jenseits von Mercator über die Probleme, die Erde in ein Quadrat zu pressen, Salzburg 1 Jenseits von Mercator 2 Jenseits von Mercator 3 Jenseits von Mercator Beispiele von Kartendiensten, die nur Mercator
Jenseits von Mercator über die Probleme, die Erde in ein Quadrat zu pressen, Salzburg 1 Jenseits von Mercator 2 Jenseits von Mercator 3 Jenseits von Mercator Beispiele von Kartendiensten, die nur Mercator
Lineare Abbildungen Definitionen von linearer Abbildung, linearer Transformation, affiner Abbildung. Parallentreue und Teilverhältnistreue
 Lineare Abbildungen Vorlesung Lineare Algebra mit integrierten Übungen WS 12 13 Studiengang LBS Unterrichtsfach Mathematik Lineare Algebra, Teil 2 Abbildungen Lineare Abbildungen Lineare Eigenwerte, Eigenvektoren
Lineare Abbildungen Vorlesung Lineare Algebra mit integrierten Übungen WS 12 13 Studiengang LBS Unterrichtsfach Mathematik Lineare Algebra, Teil 2 Abbildungen Lineare Abbildungen Lineare Eigenwerte, Eigenvektoren
Vektorgeometrie. 1. Vektoren eingeben, Norm, Skalarprodukt. 2 In einem kartesischen Koordinatensystem sind die Vektoren. , v. und. gegeben.
 Vektorgeometrie 1. Vektoren eingeben, Norm, Skalarprodukt 2 In einem kartesischen Koordinatensystem sind die Vektoren u 14, 5 11 10 v 2 und w 5 gegeben. 10 10 a) Zeigen Sie, dass die Vektoren einen Würfel
Vektorgeometrie 1. Vektoren eingeben, Norm, Skalarprodukt 2 In einem kartesischen Koordinatensystem sind die Vektoren u 14, 5 11 10 v 2 und w 5 gegeben. 10 10 a) Zeigen Sie, dass die Vektoren einen Würfel
Laserscanning. -Pilotprojekt der KompetenzZentrum Bau Neumarkt GmbH-
 Laserscanning -Pilotprojekt der KompetenzZentrum Bau Neumarkt GmbH- Beim 3D-Laserscanning werden die Konturen (Oberflächen) von Körpern und Räumen digital erfasst. Dabei entsteht eine diskrete Menge von
Laserscanning -Pilotprojekt der KompetenzZentrum Bau Neumarkt GmbH- Beim 3D-Laserscanning werden die Konturen (Oberflächen) von Körpern und Räumen digital erfasst. Dabei entsteht eine diskrete Menge von
Höhere Mathematik für Physiker II
 Universität Heidelberg Sommersemester 2013 Wiederholungsblatt Übungen zur Vorlesung Höhere Mathematik für Physiker II Prof Dr Anna Marciniak-Czochra Dipl Math Alexandra Köthe Fragen Machen Sie sich bei
Universität Heidelberg Sommersemester 2013 Wiederholungsblatt Übungen zur Vorlesung Höhere Mathematik für Physiker II Prof Dr Anna Marciniak-Czochra Dipl Math Alexandra Köthe Fragen Machen Sie sich bei
Bildbasierte Regelung mit Momenten von SIFT-Merkmalen. Torsten Seyffarth. Algorithm Engineering Report TR06-2-006 Mai 2006 ISSN 1864-4503
 Bildbasierte Regelung mit Momenten von SIFT-Merkmalen Torsten Seyffarth Algorithm Engineering Report TR06-2-006 Mai 2006 ISSN 1864-4503 Universität Dortmund Fachbereich Informatik Algorithm Engineering
Bildbasierte Regelung mit Momenten von SIFT-Merkmalen Torsten Seyffarth Algorithm Engineering Report TR06-2-006 Mai 2006 ISSN 1864-4503 Universität Dortmund Fachbereich Informatik Algorithm Engineering
Wie funktioniert das in m.objects? TIPP 442 > Das Bildfeldobjekt und seine Prozente <
 Wie funktioniert das in m.objects? TIPP 442 > Das Bildfeldobjekt und seine Prozente < Bei der Bildpräsentation mit m.objects wird zur Steuerung der Bild gestaltenden Effekte die Eingabe von Prozent-Werten
Wie funktioniert das in m.objects? TIPP 442 > Das Bildfeldobjekt und seine Prozente < Bei der Bildpräsentation mit m.objects wird zur Steuerung der Bild gestaltenden Effekte die Eingabe von Prozent-Werten
Automatisierung kompletter Kühlanlagen mittels LabVIEW und PAC-Systemen
 Automatisierung kompletter Kühlanlagen mittels LabVIEW und PAC-Systemen "Auf der Grundlage des PAC-Konzeptes mit CompactFieldPoint und LabVIEW 8.6.1 wurde innerhalb kürzester Zeit eine voll funktionsfähige
Automatisierung kompletter Kühlanlagen mittels LabVIEW und PAC-Systemen "Auf der Grundlage des PAC-Konzeptes mit CompactFieldPoint und LabVIEW 8.6.1 wurde innerhalb kürzester Zeit eine voll funktionsfähige
8 3D-Grafik mit VPython
 8 3D-Grafik mit VPython In diesem Kapitel wird das Python-Erweiterungsmodul Visual-Python bzw. VPython vorgestellt. Mit VPython können interaktive und animierte 3D-Szenen erzeugt werden. Dreidimensionale
8 3D-Grafik mit VPython In diesem Kapitel wird das Python-Erweiterungsmodul Visual-Python bzw. VPython vorgestellt. Mit VPython können interaktive und animierte 3D-Szenen erzeugt werden. Dreidimensionale
Skaleninvariante Merkmalstransformation - SIFT Merkmale
 Skaleninvariante Merkmalstransformation - SIFT Merkmale Felix Gremse Betreuer: Thomas Deselaers Inhalt 1 Einleitung 152 2 Reproduzierbare Schlüsselpunkte 152 2.1 Skalen- und Rotationsinvarianz... 152 2.2
Skaleninvariante Merkmalstransformation - SIFT Merkmale Felix Gremse Betreuer: Thomas Deselaers Inhalt 1 Einleitung 152 2 Reproduzierbare Schlüsselpunkte 152 2.1 Skalen- und Rotationsinvarianz... 152 2.2
Analyse von Bildmerkmalen zur Identifikation wichtiger Bildregionen
 University of Mannheim/Computer Science Technical Report TR-2013-004 Analyse von Bildmerkmalen zur Identifikation wichtiger Bildregionen Jakob Huber, Stephan Kopf, Philipp Schaber Department of Computer
University of Mannheim/Computer Science Technical Report TR-2013-004 Analyse von Bildmerkmalen zur Identifikation wichtiger Bildregionen Jakob Huber, Stephan Kopf, Philipp Schaber Department of Computer
Baum-Matching in einer Anwendung auf Gefäßsysteme im menschlichen Körper (Andre Bläul)
") Baum-Matching in einer Anwendung auf Gefäßsysteme im menschlichen Körper (Andre Bläul) Gliederung 1. Motivation 2. Der Algorithmus 2.1. Schritt 1 2.2. Schritt 2 2.3. Die Kostenfunktionen 3. Evaluation
Baum-Matching in einer Anwendung auf Gefäßsysteme im menschlichen Körper (Andre Bläul) Gliederung 1. Motivation 2. Der Algorithmus 2.1. Schritt 1 2.2. Schritt 2 2.3. Die Kostenfunktionen 3. Evaluation
Scannen ohne Scanner: Bildbasierte 3D Punktwolken Grundlagen, Anwendungen und Erfahrungen
 Scannen ohne Scanner: Bildbasierte 3D Punktwolken Grundlagen, Anwendungen und Erfahrungen Heinz Jürgen Przybilla Gliederung Einleitung Grundlagen Dense Image Matching / Structure from Motion Systeme Anwendungen
Scannen ohne Scanner: Bildbasierte 3D Punktwolken Grundlagen, Anwendungen und Erfahrungen Heinz Jürgen Przybilla Gliederung Einleitung Grundlagen Dense Image Matching / Structure from Motion Systeme Anwendungen
SilverFast - Pioneer in Digital Imaging. SilverFast 8. Professionelle Scanner-Software DEUTSCH. Stapel-Scan. Automatischer Dokumenten-Einzug
 SilverFast - Pioneer in Digital Imaging SilverFast 8 Professionelle Scanner-Software DEUTSCH Stapel-Scan Automatischer Dokumenten-Einzug Die SilverFast 8 Stapel-Funktionalität Manche Filmscanner sind in
SilverFast - Pioneer in Digital Imaging SilverFast 8 Professionelle Scanner-Software DEUTSCH Stapel-Scan Automatischer Dokumenten-Einzug Die SilverFast 8 Stapel-Funktionalität Manche Filmscanner sind in
Musterlösung Höhere Mathematik I/II Di. Aufgabe 1 (11 Punkte) Geben Sie die Matrixbeschreibung der Quadrik
 Geben Sie die Matrixbeschreibung der Quadrik") Aufgabe Punkte Geben Sie die Matrixbeschreibung der Quadrik {x R 3x 3x 8x x +x +4x +7 = 0} an Berechnen Sie die euklidische Normalform der Quadrik und ermitteln Sie die zugehörige Koordinatentransformation
Aufgabe Punkte Geben Sie die Matrixbeschreibung der Quadrik {x R 3x 3x 8x x +x +4x +7 = 0} an Berechnen Sie die euklidische Normalform der Quadrik und ermitteln Sie die zugehörige Koordinatentransformation
8 Extremwerte reellwertiger Funktionen
 8 Extremwerte reellwertiger Funktionen 34 8 Extremwerte reellwertiger Funktionen Wir wollen nun auch Extremwerte reellwertiger Funktionen untersuchen. Definition Es sei U R n eine offene Menge, f : U R
8 Extremwerte reellwertiger Funktionen 34 8 Extremwerte reellwertiger Funktionen Wir wollen nun auch Extremwerte reellwertiger Funktionen untersuchen. Definition Es sei U R n eine offene Menge, f : U R
7. Triangulation von einfachen Polygonen
 1 7. Triangulation von einfachen Polygonen 2 Ziel Bessere Laufzeit als O(n log n) durch schnelleres Berechnen der Trapezzerlegung des Polygons. 3 Idee Finde Methode, den Anfangspunkt einer Strecke in der
1 7. Triangulation von einfachen Polygonen 2 Ziel Bessere Laufzeit als O(n log n) durch schnelleres Berechnen der Trapezzerlegung des Polygons. 3 Idee Finde Methode, den Anfangspunkt einer Strecke in der
(7) Normal Mapping. Vorlesung Computergraphik II S. Müller. Dank an Stefan Rilling U N I V E R S I T Ä T KOBLENZ LANDAU
 Normal Mapping. Vorlesung Computergraphik II S. Müller. Dank an Stefan Rilling U N I V E R S I T Ä T KOBLENZ LANDAU") (7) Normal Mapping Vorlesung Computergraphik II S. Müller Dank an Stefan Rilling Einleitung Die Welt ist voller Details Viele Details treten in Form von Oberflächendetails auf S. Müller - 3 - Darstellung
(7) Normal Mapping Vorlesung Computergraphik II S. Müller Dank an Stefan Rilling Einleitung Die Welt ist voller Details Viele Details treten in Form von Oberflächendetails auf S. Müller - 3 - Darstellung
HRP 2007 (BOS): Schriftliche Prüfungsaufgaben im Fach Mathematik (Vorschlag 2) HRP BOS-
: Schriftliche Prüfungsaufgaben im Fach Mathematik (Vorschlag 2) HRP BOS-") HRP 007 (BOS): Schriftliche Prüfungsaufgaben im Fach Mathematik (Vorschlag ) Bildung, Wissenschaft und Forschung HRP 007 -BOS- Name: Datum: Vorschlag : Aus 5 Aufgaben können Sie 3 auswählen. Sie müssen
HRP 007 (BOS): Schriftliche Prüfungsaufgaben im Fach Mathematik (Vorschlag ) Bildung, Wissenschaft und Forschung HRP 007 -BOS- Name: Datum: Vorschlag : Aus 5 Aufgaben können Sie 3 auswählen. Sie müssen