Gebaut und entwickelt von Jörg-Michael Weber (14) 1. Die Idee 2. Der mechanische Aufbau 3. Die Programmierung 4. Abschluss
|
|
|
- Valentin Schwarz
- vor 6 Jahren
- Abrufe
Transkript
1 Gebaut und entwickelt von Jörg-Michael Weber (14) 1. Die Idee 2. Der mechanische Aufbau 3. Die Programmierung 4. Abschluss
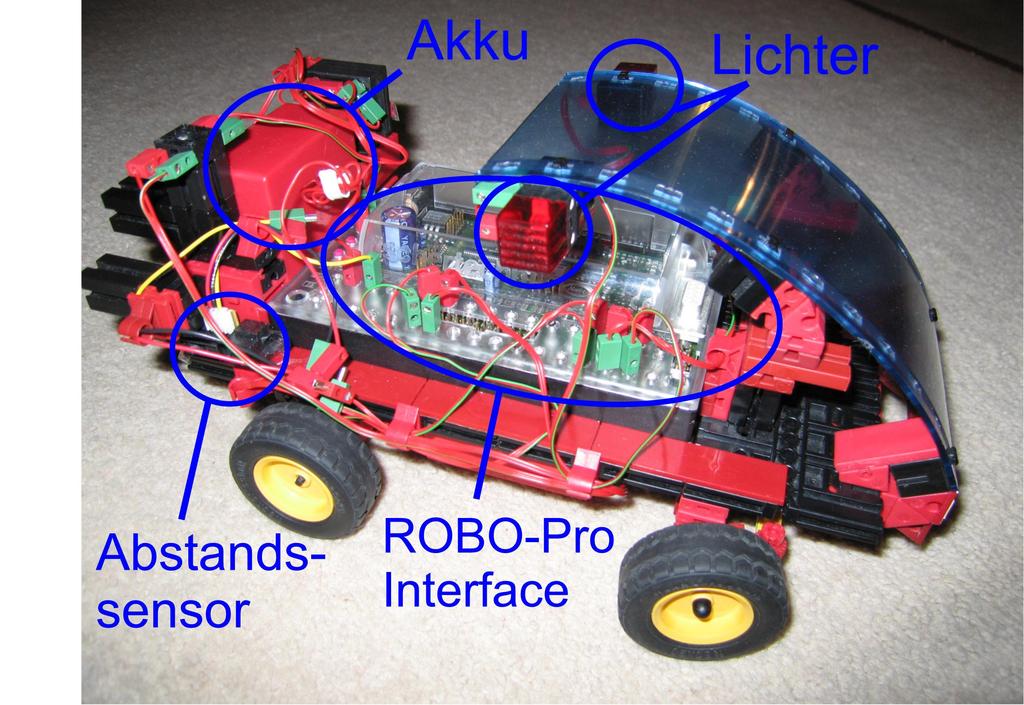
2 1. Die Idee Ich kenne viele Leute, die Probleme beim Rückwärts-einparken haben und oft deswegen auch Umwege zurücklegen, um bestimmte knifflige Situationen zu vermeiden. Auch passieren oft Einpark-Unfälle. Da dachte ich mir, das ist was für mich und begann mit der genaueren Ausarbeitung und Planung das war zwischen Sommer und Herbst Da ich irgendwie Abstände messen muss, suchte ich und fand den GP2D120 von Sharp, ein Entfernungsmesser für die Abstände von 4 30 cm, der seine Signale über die Spannung ausgibt, die ich dann wiederum auslesen kann. Da er auf 5 Volt lief und mein ROBO-Pro Interface (Eine Art programmierbare Steuerungseinheit, mit dem man Sensoren/Motoren ansteuern und abfragen kann) auf 9 Volt, musste ich noch anhand einer Anleitung im Internet in der Schule eine Art Spannungswandler zusammenlöten. Von früher hatte ich auch noch eine Fischertechnik 1 Fernsteuerung (Infrarot), die ich dann auch einbauen wollte, um das Auto ferngesteuert herumfahren zu lassen. 2. Der mechanische Aufbau 1 vgl.

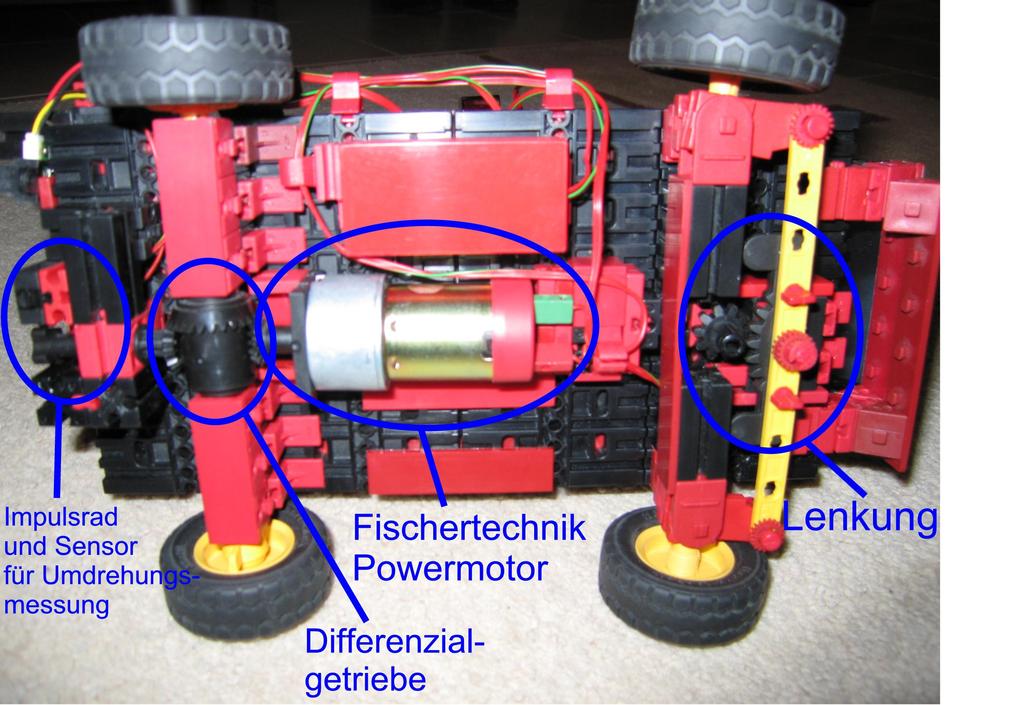
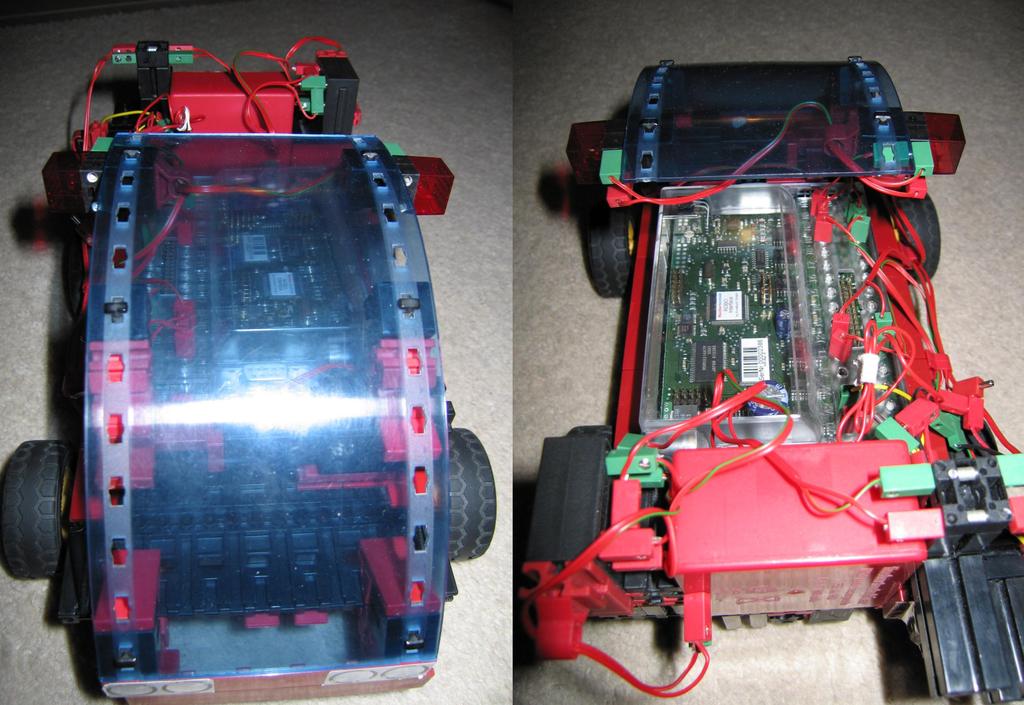
3 Gegen Winteranfang fing ich mit dem Bauen des Autos an natürlich mit Fischertechnik, da ich damit schon Erfahrung hatte und da es das einzige war, mit dem ich die gewünschten Ergebnisse erreichen konnte, ohne mir erst große Modelbaukenntnisse anzuschaffen. Für den Antrieb benutzte ich einen Motor und ein Differenzialgetriebe. Ein Impulsrädchen am Antriebsmotor sorgt dafür, dass ich eine Reifenumdrehung genau messen kann. Eine Lenkung gab es zwar von Fischertechnik schon, aber die war leider zu klein, deswegen habe ich auf Basis von ihr eine größere gebaut. Sie lässt sich durch eine Zahnradübersetzung von einem Motor drehen und hat einen Sensor, um zu wissen, wann sie sich in Mittelstellung befindet. Auf der Oberseite des Autos kam das ROBO-Pro Interface von Fischertechnik, der Motor für die Lenkung, die zwei Abstandssensoren von Sharp (einer an der Seite und einer Hinten) und der Akku. Am Schluss kam noch ein Blinklicht (um anzuzeigen, dass z.b. der Abstand zu klein zum Einparken ist) und ein bisschen Abdeckung für ein besseres Aussehen. Abbildung 1: Bild des benutzten Entfernungsmesssensors von Sharp (aus dem Internet) 2. Die Programmierung Zeitgleich zu dem Aufbau des Autos fing ich schon einmal mit der Programmierung an. Mithilfe der mitgelieferten Software ROBO Pro von Fischertechnik, eine graphische
 anderen Funktionen hinzu, das Messen und das Einparken.")
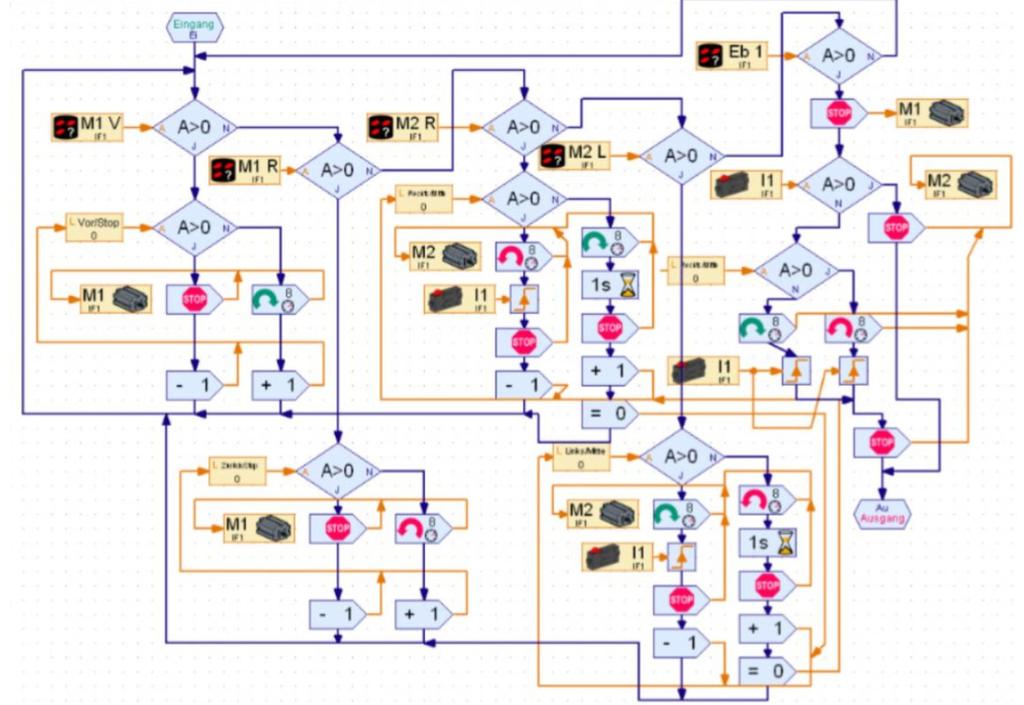
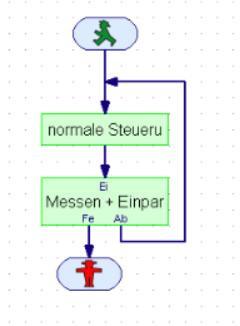
4 Programmieroberfläche, programmierte ich die Grundzüge des Steuersystems, um wenigstens die Fernsteuerung zu testen. Nach und nach kamen dann die (theoretischen, noch unerprobten) anderen Funktionen hinzu, das Messen und das Einparken. Abbildung 2: Das Hauptprogramm, es startet nur die Unterprogramme und führt sie aus Nach dem Start des Programmes wird erst einmal die Steuerung über den IR-Handsensor mittels eines Unterprogrammes gestartet.

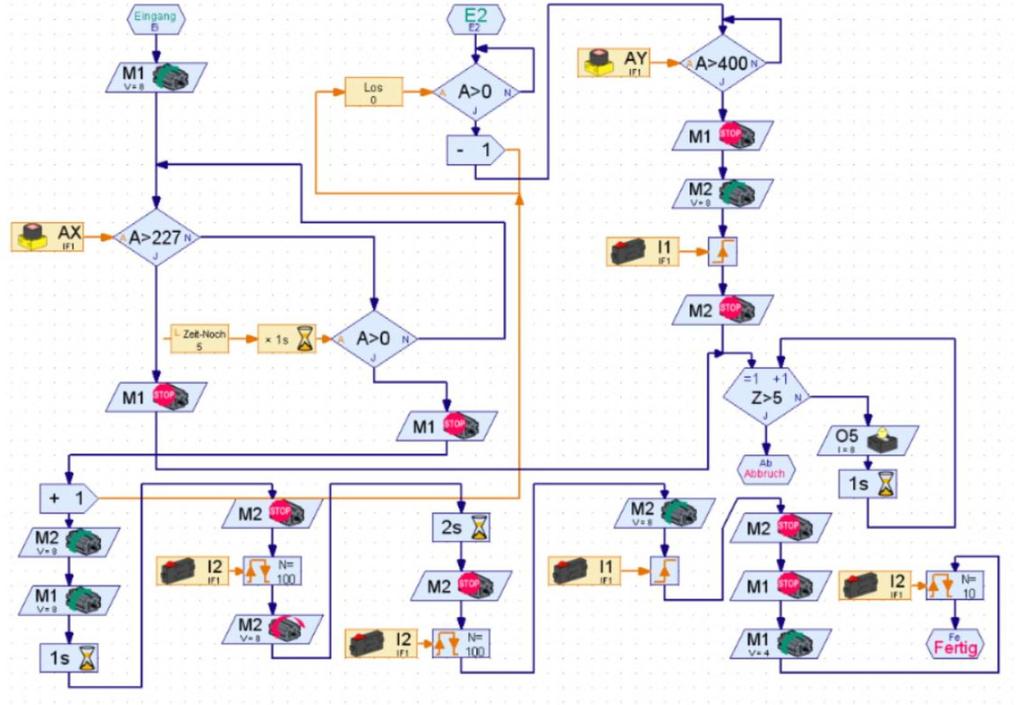
5 Abbildung 3: Das Unterprogramm ist für die Steuerung des Autos per IR-Sender zuständig falls der Einparkknopf gedrückt wird, wird es abgebrochen und im Falle einer zu kleinen Parklücke wird es wieder gestartet Sobald der Einparkknopf gedrückt wird, geht die Steuerung über auf ein anderes Unterprogramm, dass geradeaus an der Parklücke vorbeifährt und mithilfe des Abstandssensor an der Seite misst, ob genügend Platz zum Einparken vorhanden ist.

6 Abbildung 4: Das zweite Unterprogramm misst die Parklücke, den Abstand vom Heck aus und parkt ein Falls Nein wird die Steuerung wieder an die Fernsteuerung übergeben, falls Ja wird rückwärts eingeparkt. Der Einparkvorgang wird mithilfe des Impulsrädchens gesteuert, nach einer bestimmten Anzahl an Umdrehungen wird gegengelenkt und nach einer weiteren Anzahl wird gestoppt und wieder ein kleines Stückchen vorgefahren, um auch genügend Platz für andere Autos zu lassen. Ein weiterer Sensor am Heck überprüft, ob man nicht doch anstößt und wie viel Abstand man noch zum Hinterauto hat, im Falle der Gefahr wird der Einpark-Vorgang beendet und man selber übernimmt wieder die Steuerung.
7 Probleme: -Am Anfang hatte ich 5 Prozesse gleichzeitig ablaufen für jeden (drückbaren) IR-Knopf einen. Da das aber sich immer mehr verzweigte, merkte ich, dass das nichts brachte. Also programmierte ich eine Schleife, die nacheinander die Knöpfe abfragt, wobei das Nacheinander sehr schnell geht. -Falls man einparken wollte, musste ich erst einmal die Lenkung gerade stellen wusste aber nicht, wie. Die Lösung ist eine Variable, die speichert, ob die Lenkung Rechts/Links oder in der Mitte steht. -und dann natürlich die üblichen Fehler, die sich einschleichen und auszumerzen sind 4. Abschluss Ich bin in den nächsten Wochen (heute ist der 18. Januar) wahrscheinlich immer noch am experimentieren und verbessern, welchen Abstand ich genau benötige, wie viele Impulszahnrad Umdrehungen es sein müssen etc. Doch bin ich stolz darauf, mein Ziel - ein selbsteinparkendes Auto zu entwickeln - erreicht zu haben. Man könnte natürlich das Ganze noch verbessern, z.b. auf beiden Seiten Abstandssensoren, aber mir ging es nur um das Prinzip was auf einer Seite klappt, klappt auch auf der anderen Leider konnte ich keine Bilder meines Autos miteinbauen, da ich keine Digitalcamera oder sonstiges besitze. Doch überhaupt danke ich der Firma Fischertechnik, denn ohne ihre tollen Baukästen und Bausteine wäre es mir überhaupt gar nicht möglich gewesen, so etwas Anspruchsvolles zu entwickeln. Außerdem danke ich dem Fischertechnik Forum und seinen Usern, die mir durch einige Tipps weitergeholfen haben.

8
9
10
11
12
13
14
Wichtige Befehle bei der Programmierung von. FISCHER-Technik
 Wichtige Befehle bei der Programmierung von FISCHER-Technik 1 7 6 2 3 4 5 1) Interfacediagnose : Bevor du loslegst, teste alle, an den Eingängen E1-E8 angeschlossenen Schalter und Sensoren. Mit der linken
Wichtige Befehle bei der Programmierung von FISCHER-Technik 1 7 6 2 3 4 5 1) Interfacediagnose : Bevor du loslegst, teste alle, an den Eingängen E1-E8 angeschlossenen Schalter und Sensoren. Mit der linken
Labor Automatisierungstechnik
 Labor Automatisierungstechnik Teilnehmer: Name: Matrikelnr.: Name: Matrikelnr.: Name: Matrikelnr.: Versuch: Robotino Anwendung Philipp Schorr Arduino Anwendung 1 Inhaltsverzeichnis 1. Einleitende Worte...
Labor Automatisierungstechnik Teilnehmer: Name: Matrikelnr.: Name: Matrikelnr.: Name: Matrikelnr.: Versuch: Robotino Anwendung Philipp Schorr Arduino Anwendung 1 Inhaltsverzeichnis 1. Einleitende Worte...
ORIKA. Lycée Technique des Arts et Métiers. ... viel mehr als nur ein Spielzeug
 ORIKA Lycée Technique des Arts et Métiers... viel mehr als nur ein Spielzeug Informationen, Hinweise und Bezugsquellen findest du unter folgender Internetadresse: http://www.ltam.lu/fischertechnik ORIKA/Informatik
ORIKA Lycée Technique des Arts et Métiers... viel mehr als nur ein Spielzeug Informationen, Hinweise und Bezugsquellen findest du unter folgender Internetadresse: http://www.ltam.lu/fischertechnik ORIKA/Informatik
Mit dem neuen Baukasten Computing Starter
 Station 1 Mit dem neuen Baukasten Computing Starter Auf der Platte sind 2 Versuche aufgebaut, die nacheinander durchgeführt werden können: 1. Händetrockner 2 mit den Bauteilen - Lampe - LDR - Motor mit
Station 1 Mit dem neuen Baukasten Computing Starter Auf der Platte sind 2 Versuche aufgebaut, die nacheinander durchgeführt werden können: 1. Händetrockner 2 mit den Bauteilen - Lampe - LDR - Motor mit
Roboterprojekt Bluetooth RC Car
 Roboterprojekt Bluetooth RC Car 1. Projektidee 1.1 Aufgabe des Roboters Unser Roboter ist ein Auto, das via Bluetooth ferngesteuert wird. Dabei werden 2 NXT s verwendet; einer auf dem Auto und einer dient
Roboterprojekt Bluetooth RC Car 1. Projektidee 1.1 Aufgabe des Roboters Unser Roboter ist ein Auto, das via Bluetooth ferngesteuert wird. Dabei werden 2 NXT s verwendet; einer auf dem Auto und einer dient
Ampelsteuerung Merkblatt 2 Wie wird der Arduino programmiert?
 1 Übersicht Für die Programmierung steht ein Programm zur Verfügung. Hier kann der Quelltext geschrieben, überprüft, kompiliert und anschließend auf den Arduino geladen werden. Wenn ihr das Programm startet,
1 Übersicht Für die Programmierung steht ein Programm zur Verfügung. Hier kann der Quelltext geschrieben, überprüft, kompiliert und anschließend auf den Arduino geladen werden. Wenn ihr das Programm startet,
Pacman. Projektbeschreibung. Aus was wir Pacman nachgebaut haben. Anpassungen and die physikalische Welt, oder wie wir das
 Pacman Projektbeschreibung Übersicht: Unser Projekt Was Pacman eigentlich ist. Aus was wir Pacman nachgebaut haben. Anpassungen and die physikalische Welt, oder wie wir das Pacman-Spiel mit Lego implementiert
Pacman Projektbeschreibung Übersicht: Unser Projekt Was Pacman eigentlich ist. Aus was wir Pacman nachgebaut haben. Anpassungen and die physikalische Welt, oder wie wir das Pacman-Spiel mit Lego implementiert
Kopieren / Klonen mit dem TS601 - Benutzer Anleitung Deutsch
 Kopieren / Klonen mit dem TS601 - Benutzer Anleitung Deutsch Stand: 20150821 Video über das Klonen / Kopieren finden Sie auch auf unserer Homepage unter www.maxsensor.de Inhaltsverzeichnis: Geräte-Beschreibung...
Kopieren / Klonen mit dem TS601 - Benutzer Anleitung Deutsch Stand: 20150821 Video über das Klonen / Kopieren finden Sie auch auf unserer Homepage unter www.maxsensor.de Inhaltsverzeichnis: Geräte-Beschreibung...
Einführung Arduino - Aufbau
 Einführung Arduino Einführung Arduino - Aufbau Einführung Arduino - Breadboard (http://www.circuit-help.com.ph/wpcontent/uploads/2014/02/imgp5507-600x600.jpg) Einführung Arduino - Breadboard (https://images.duckduckgo.com/iu/?u=http%3a%2f
Einführung Arduino Einführung Arduino - Aufbau Einführung Arduino - Breadboard (http://www.circuit-help.com.ph/wpcontent/uploads/2014/02/imgp5507-600x600.jpg) Einführung Arduino - Breadboard (https://images.duckduckgo.com/iu/?u=http%3a%2f
Mess- und Regelungstechnik
 Mess- und Regelungstechnik Professor: Dr. Löffler Mang Semester: WS 00/01 Inhaltsverzeichnis 1. Thema 2. Das Mind- Storm- System 2.1 Der RCX 2.2 Die Sensoren 2.2.1 Der Tastsensor 2.2.2 Der Lichtsensor
Mess- und Regelungstechnik Professor: Dr. Löffler Mang Semester: WS 00/01 Inhaltsverzeichnis 1. Thema 2. Das Mind- Storm- System 2.1 Der RCX 2.2 Die Sensoren 2.2.1 Der Tastsensor 2.2.2 Der Lichtsensor
Basisanforderungen: Erweiterte Anforderungen: Das fertige Protokoll bitte im Aufgabentool von I-Serv unter Abgaben hochladen!
 Basisanforderungen: 1. Erstelle das Modell der Temperaturregelung inkl. Programmierung. 2. Erläutere den Unterschied zwischen einer Steuerung und einer Regelung. 3. Benenne die Sensoren und Aktoren dieser
Basisanforderungen: 1. Erstelle das Modell der Temperaturregelung inkl. Programmierung. 2. Erläutere den Unterschied zwischen einer Steuerung und einer Regelung. 3. Benenne die Sensoren und Aktoren dieser
Fragen? Wie komme ich effizient zu einem Programm? Wie beschreibe/dokumentiere ich meine Idee?
 Fragen? Wie komme ich effizient zu einem Programm? Wie beschreibe/dokumentiere ich meine Idee? Schritte beim Programmieren Idee, was der Roboter tun soll? EVA-Prinzip E: Eingabe Welche Daten werden über
Fragen? Wie komme ich effizient zu einem Programm? Wie beschreibe/dokumentiere ich meine Idee? Schritte beim Programmieren Idee, was der Roboter tun soll? EVA-Prinzip E: Eingabe Welche Daten werden über
Baue deinen ersten Roboter
 D3kjd3Di38lk323nnm 2 Baue deinen ersten Roboter In Kapitel 1 hast du gelernt, dass Roboter aus Motoren, Sensoren und dem EV3-Stein bestehen. Damit du besser verstehst, wie diese zusammenarbeiten, setzen
D3kjd3Di38lk323nnm 2 Baue deinen ersten Roboter In Kapitel 1 hast du gelernt, dass Roboter aus Motoren, Sensoren und dem EV3-Stein bestehen. Damit du besser verstehst, wie diese zusammenarbeiten, setzen
Regelwerk für die. Robo-Tec Version vom Jedes Team besteht mindestens aus zwei, maximal aus fünf Mitgliedern.
 Regelwerk für die Robo-Tec 2016 Version vom 10.2.2016 1 Team und Roboter 1. Jedes Team besteht mindestens aus zwei, maximal aus fünf Mitgliedern. 2. Jedes Team darf nur einen Roboter benutzen. Die Technik
Regelwerk für die Robo-Tec 2016 Version vom 10.2.2016 1 Team und Roboter 1. Jedes Team besteht mindestens aus zwei, maximal aus fünf Mitgliedern. 2. Jedes Team darf nur einen Roboter benutzen. Die Technik
Versuch D3: Busse, Speicher und Ampelsteuerung mit Speicher
 Versuch D3: Busse, Speicher und Ampelsteuerung mit Speicher Version D3_16 vom 25.05.2016 Ziel dieses Versuches: Entwicklung einer Ablaufsteuerung mit einem 32 * 4 bit Speicherbaustein, um eine flexible
Versuch D3: Busse, Speicher und Ampelsteuerung mit Speicher Version D3_16 vom 25.05.2016 Ziel dieses Versuches: Entwicklung einer Ablaufsteuerung mit einem 32 * 4 bit Speicherbaustein, um eine flexible
JUFOTech. WKO.at/tirol/jufotech DATENBLATT. Jugend forscht in der Technik. Titel der Projektarbeit: Fachgebiet:
 Datenblatt (dient als Titelblatt für die Projektarbeit) Seite 1/2 JUFOTech Jugend forscht in der Technik WKO.at/tirol/jufotech DATENBLATT Wir nehmen am Wettbewerb Jugend forscht in der Technik Auf den
Datenblatt (dient als Titelblatt für die Projektarbeit) Seite 1/2 JUFOTech Jugend forscht in der Technik WKO.at/tirol/jufotech DATENBLATT Wir nehmen am Wettbewerb Jugend forscht in der Technik Auf den
Willkommen in der Welt der fischertechnik ROBOTICS-Linie 3 Ein paar allgemeine Infos 3. Bauteilerklärungen 4
 Willkommen in der Welt der fischertechnik ROBOTICS-Linie 3 Ein paar allgemeine Infos 3 Elektrizität 3 Roboter, der künstliche Mensch? 4 ROBOTICS, (fast) alles automatisch 4 Bauteilerklärungen 4 ROBOTICS-Modul
Willkommen in der Welt der fischertechnik ROBOTICS-Linie 3 Ein paar allgemeine Infos 3 Elektrizität 3 Roboter, der künstliche Mensch? 4 ROBOTICS, (fast) alles automatisch 4 Bauteilerklärungen 4 ROBOTICS-Modul
1 Robo Pro : Handreichungen Jahrgang 8 Arbeiten mit Robo Pro Hibsmodelle steuern
 1 Robo Pro : Handreichungen Ein neues Programm mit Robo Pro erstellen Mit der Software ROBO Pro kannst du Steuerungsprogramme entwerfen und mit Hilfe eines angeschlossenen Interfaces deine Modelle testen.
1 Robo Pro : Handreichungen Ein neues Programm mit Robo Pro erstellen Mit der Software ROBO Pro kannst du Steuerungsprogramme entwerfen und mit Hilfe eines angeschlossenen Interfaces deine Modelle testen.
Inhaltsverzeichnis. 1 Anfang 2. 2 Erste Schritte 3. 3 Schleifen repeat while(true) Die if()-schleife... 5.
 Die if()-schleife... 5.") Inhaltsverzeichnis 1 Anfang 2 2 Erste Schritte 3 3 Schleifen 4 3.1 repeat...................................... 4 3.2 while(true).................................... 4 3.3 Die if()-schleife.................................
Inhaltsverzeichnis 1 Anfang 2 2 Erste Schritte 3 3 Schleifen 4 3.1 repeat...................................... 4 3.2 while(true).................................... 4 3.3 Die if()-schleife.................................
Anleitung DGTV Fernbedienung
 Anleitung DGTV Fernbedienung Inhaltsverzeichnis: 1. Einstellung der Fernbedienung auf Radio-Frequenz 4 2. Kupplung der Fernbedienung mit dem TV-Gerät 5 2.1 Automatische Suchfunktion 5 2.2 Programmieren
Anleitung DGTV Fernbedienung Inhaltsverzeichnis: 1. Einstellung der Fernbedienung auf Radio-Frequenz 4 2. Kupplung der Fernbedienung mit dem TV-Gerät 5 2.1 Automatische Suchfunktion 5 2.2 Programmieren
Fragebogen zur Programmierung mit Aseba / VPL
 Fragebogen zur Programmierung mit Aseba / VPL Liebe/er Schüler/in Mit diesem Fragebogen möchten wir die Anwendungsmöglichkeiten des Thymio-II Roboter und der Aseba/VPL Software verbessern. Bitte beantworte
Fragebogen zur Programmierung mit Aseba / VPL Liebe/er Schüler/in Mit diesem Fragebogen möchten wir die Anwendungsmöglichkeiten des Thymio-II Roboter und der Aseba/VPL Software verbessern. Bitte beantworte
plug & learn mit CrossRoads und ROBO Pro Projekte zur Informatik und Prozessdatenverarbeitung in der Sek. I
 plug & learn mit CrossRoads und ROBO Pro Projekte zur Informatik und Prozessdatenverarbeitung in der Sek. I education line plug & learn mit CrossRoads und ROBO Pro Ampelsteuerung mit ROBO Pro Autos Dauer
plug & learn mit CrossRoads und ROBO Pro Projekte zur Informatik und Prozessdatenverarbeitung in der Sek. I education line plug & learn mit CrossRoads und ROBO Pro Ampelsteuerung mit ROBO Pro Autos Dauer
Nutzung von MIDI-Geräten unter DMXControl 2.8 Dokument-Version 1.0
 Daniel Miertz Mai 2004 Nutzung von MIDI-Geräten unter DMXControl 2.8 Dokument-Version 1.0 Einleitung DMXControl stellt die Möglichkeit bereit, die Lichtshow teilweise oder vollständig über ein MIDI-Interface
Daniel Miertz Mai 2004 Nutzung von MIDI-Geräten unter DMXControl 2.8 Dokument-Version 1.0 Einleitung DMXControl stellt die Möglichkeit bereit, die Lichtshow teilweise oder vollständig über ein MIDI-Interface
Generalvertrieb Deutschland. Betriebsanleitung. Gelenkarm-Doppelflügeltor-Antrieb
 Generalvertrieb Deutschland www..de Betriebsanleitung Gelenkarm-Doppelflügeltor-Antrieb An der Sägemühle 6 46499 Hamminkeln Telefon: 02852-7089518 oder 0172-2462336 E-Mail: m.stroet@gmx.de Sicherheitshinweise:
Generalvertrieb Deutschland www..de Betriebsanleitung Gelenkarm-Doppelflügeltor-Antrieb An der Sägemühle 6 46499 Hamminkeln Telefon: 02852-7089518 oder 0172-2462336 E-Mail: m.stroet@gmx.de Sicherheitshinweise:
Anleitung Mehrformat Leinwand Steuerung
 Anleitung Mehrformat Leinwand Steuerung Bitte lesen Sie diese Anleitung vor Inbetriebnahme sorgfältig durch und beachten auch die Anmerkungen zur Einstellung der Endpunkte. Anschluss Motorsteuerleitungen
Anleitung Mehrformat Leinwand Steuerung Bitte lesen Sie diese Anleitung vor Inbetriebnahme sorgfältig durch und beachten auch die Anmerkungen zur Einstellung der Endpunkte. Anschluss Motorsteuerleitungen
SCHÜEX NORDRHEIN-WESTFALEN
 DEUTSCHE GESELLSCHAFT FÜR ZERSTÖRUNGSFREIE PRÜFUNG E.V. ZfP-Sonderpreis der DGZfP beim Landeswettbewerb Jugend forscht SCHÜEX NORDRHEIN-WESTFALEN Makroskop-Modell eines Rastertunnelmikroskops Katharina
DEUTSCHE GESELLSCHAFT FÜR ZERSTÖRUNGSFREIE PRÜFUNG E.V. ZfP-Sonderpreis der DGZfP beim Landeswettbewerb Jugend forscht SCHÜEX NORDRHEIN-WESTFALEN Makroskop-Modell eines Rastertunnelmikroskops Katharina
R/C Hubschrauber Bedienungsanleitung
 style your life altracom GmbH Meckenloher Str. 11 // 91126 Rednitzhembach web: www.trendy-planets.de // mail: service@trendy-planets.de trendy planets ist ein Tochterunternehmen der altracom GmbH R/C Hubschrauber
style your life altracom GmbH Meckenloher Str. 11 // 91126 Rednitzhembach web: www.trendy-planets.de // mail: service@trendy-planets.de trendy planets ist ein Tochterunternehmen der altracom GmbH R/C Hubschrauber
Deinen EV3-Kasten vorbereiten
 1 Deinen EV3-Kasten vorbereiten Alle Roboter dieses Buchs können mit nur einem Lego-Mindstorms-EV3- Kasten gebaut werden (Lego-Katalognummer 31313). Wenn du diesen Kasten, gezeigt in Abbildung 1-1, besitzt,
1 Deinen EV3-Kasten vorbereiten Alle Roboter dieses Buchs können mit nur einem Lego-Mindstorms-EV3- Kasten gebaut werden (Lego-Katalognummer 31313). Wenn du diesen Kasten, gezeigt in Abbildung 1-1, besitzt,
R/C Hubschrauber Bedienungsanleitung
 style your life AAF GmbH Kuckuckstr. 30 // 82237 Wörthsee web: www.trendy-planets.de // mail: service@trendy-planets.de trendy planets ist eine eingetragene Marke der AAF GmbH R/C Hubschrauber Bedienungsanleitung
style your life AAF GmbH Kuckuckstr. 30 // 82237 Wörthsee web: www.trendy-planets.de // mail: service@trendy-planets.de trendy planets ist eine eingetragene Marke der AAF GmbH R/C Hubschrauber Bedienungsanleitung
Jürgen Roth. Einparken. Jürgen Roth Einparken Landau 1
 14.04.2015 Landau 1 Jürgen Roth Einparken 14.04.2015 Landau 2 1. Das Problem 2. Experimentelle Geometrie 3. Projektarbeit Ein ideales Thema für experimentelle Geometrie und Projektarbeit 4. Schülerprojekttage
14.04.2015 Landau 1 Jürgen Roth Einparken 14.04.2015 Landau 2 1. Das Problem 2. Experimentelle Geometrie 3. Projektarbeit Ein ideales Thema für experimentelle Geometrie und Projektarbeit 4. Schülerprojekttage
NuVinci Desktop PC Gebrauchsanweisung (enthält NuVinci Harmony Sortware-Update Anleitung)
") NuVinci Desktop PC Gebrauchsanweisung (enthält NuVinci Harmony Sortware-Update Anleitung) NuVinci Computer Software (Harmony Programmierung) Erstellt für Händler und Hersteller Internet-download erfolgt
NuVinci Desktop PC Gebrauchsanweisung (enthält NuVinci Harmony Sortware-Update Anleitung) NuVinci Computer Software (Harmony Programmierung) Erstellt für Händler und Hersteller Internet-download erfolgt
Zugang Website:
 Posten: Bauen - Die SuS können das NXT Basismodel anhand der Bauanleitung 1:1 nachbauen. ( ) 30 - NXT Baukasten - Anleitung Auftrag: Baue das Basismodel von NXT. Halte dich dabei an die bereitgestellte
Posten: Bauen - Die SuS können das NXT Basismodel anhand der Bauanleitung 1:1 nachbauen. ( ) 30 - NXT Baukasten - Anleitung Auftrag: Baue das Basismodel von NXT. Halte dich dabei an die bereitgestellte
Unterwegs in Berlin. Als ich 12 Jahre alt war... von Janine Schuhmacher
 Unterwegs in Berlin George Orwell Oberschule Klasse 8d 04. - 08.04.2011 Lichtenberg Als ich 12 Jahre alt war... von Janine Schuhmacher Workshop: Literatur Workshopleitung: Markus Beauchamp Ein Projekt
Unterwegs in Berlin George Orwell Oberschule Klasse 8d 04. - 08.04.2011 Lichtenberg Als ich 12 Jahre alt war... von Janine Schuhmacher Workshop: Literatur Workshopleitung: Markus Beauchamp Ein Projekt
When Androids Control Robots
 When Androids Control Robots Inhalt Motivation Entwicklungsmethoden Workshop Evaluation Zusammenfassung 2/16 Motivation» Problem Informatik hat den Ruf kompliziert, unverständlich und langweilig und eine
When Androids Control Robots Inhalt Motivation Entwicklungsmethoden Workshop Evaluation Zusammenfassung 2/16 Motivation» Problem Informatik hat den Ruf kompliziert, unverständlich und langweilig und eine
R/C Hubschrauber Bedienungsanleitung
 style your life altracom GmbH Meckenloher Str. 11 // 91126 Rednitzhembach web: www.trendy-planets.de // mail: service@trendy-planets.de trendy planets ist ein Tochterunternehmen der altracom GmbH R/C Hubschrauber
style your life altracom GmbH Meckenloher Str. 11 // 91126 Rednitzhembach web: www.trendy-planets.de // mail: service@trendy-planets.de trendy planets ist ein Tochterunternehmen der altracom GmbH R/C Hubschrauber
Messungen mit dem Lichtsensor
 Messungen mit dem Lichtsensor Für die Programmierung eines Roboters, der einer Linie folgt, brauchen wir für die drei Farben die Helligkeitswerte, die dein Lichtsensor jeweils ausgibt. Arbeite dazu folgende
Messungen mit dem Lichtsensor Für die Programmierung eines Roboters, der einer Linie folgt, brauchen wir für die drei Farben die Helligkeitswerte, die dein Lichtsensor jeweils ausgibt. Arbeite dazu folgende
Aufgabe Im Quadrat fahren
 Aufgabensammlung LEGO MINDSTORMS NXT Version 4.6.13 Aufgabe Im Quadrat fahren Ziel Sie programmieren den Lego Roboter mit dem Programm LEGO MINDSTORMS Sie kennen Bedingungen und Schleifen Zeitaufwand 20
Aufgabensammlung LEGO MINDSTORMS NXT Version 4.6.13 Aufgabe Im Quadrat fahren Ziel Sie programmieren den Lego Roboter mit dem Programm LEGO MINDSTORMS Sie kennen Bedingungen und Schleifen Zeitaufwand 20
Lieferumfang: Programmierbare 24 Kanal Funkzündanlage Für Brückenzünder A
 Bedienungsanleitung Programmierbare 24 Kanal Funkzündanlage Für Brückenzünder A Lieferumfang: -24 Kanal Empfänger (Case) (Blei-Gel Batterie intern) -24 Kanal Sender (Steppfunktion, ALL, und Programmierung)
Bedienungsanleitung Programmierbare 24 Kanal Funkzündanlage Für Brückenzünder A Lieferumfang: -24 Kanal Empfänger (Case) (Blei-Gel Batterie intern) -24 Kanal Sender (Steppfunktion, ALL, und Programmierung)
ACD dicon (direct control) / Systemu berblick Seite 1
 / Systemu berblick Seite 1") Seite 1 ACD dicon ist ein Digitalsystem fu r Slotracing optimiert zum professionellen Nachru sten von vorhandenen Analogbahnen. Dabei bleibt die analoge Fahrweise voll erhalten und kann jeder Zeit sogar
Seite 1 ACD dicon ist ein Digitalsystem fu r Slotracing optimiert zum professionellen Nachru sten von vorhandenen Analogbahnen. Dabei bleibt die analoge Fahrweise voll erhalten und kann jeder Zeit sogar
Zusatzaufgabe 1: Wenn ein Auto die Katze berührt, ändert sie ihr Kostüm
 Zusatzaufgabe 1: Wenn ein Auto die Katze berührt, ändert sie ihr Kostüm Zeichne ein neues Kostüm für die Katze. Sie soll es immer dann anziehen, wenn sie von einem Auto angefahren wird. Scratch wird von
Zusatzaufgabe 1: Wenn ein Auto die Katze berührt, ändert sie ihr Kostüm Zeichne ein neues Kostüm für die Katze. Sie soll es immer dann anziehen, wenn sie von einem Auto angefahren wird. Scratch wird von
mblock & mbot Roboter Programmierung auf der Basis von Scratch
 Roboter Programmierung auf der Basis von Scratch Institut ICT & Medien www.iim.phsg.ch START mbot verbinden mblock mit mbot verbinden Der mbot-roboter kann mit der mblock-software programmiert werden.
Roboter Programmierung auf der Basis von Scratch Institut ICT & Medien www.iim.phsg.ch START mbot verbinden mblock mit mbot verbinden Der mbot-roboter kann mit der mblock-software programmiert werden.
NWT Projekt Jannik Karl NWT Projekt Arbeit Legoroboter
 NWT Projekt Arbeit Legoroboter Inhalt Projekt 1: - Aufgabe - Planung - Umsetzung - Optimierung - Programm - Endergebnis Projekt 2: - Aufgabe - Planung - Umsetzung - Optimierung - Programm 1 - Programm
NWT Projekt Arbeit Legoroboter Inhalt Projekt 1: - Aufgabe - Planung - Umsetzung - Optimierung - Programm - Endergebnis Projekt 2: - Aufgabe - Planung - Umsetzung - Optimierung - Programm 1 - Programm
SHARK MP74 BETRIEBSANLEITUNG MIT USB & SD ABSPIELMÖGLICHKEIT
 SHARK MP74 BETRIEBSANLEITUNG MIT USB & SD ABSPIELMÖGLICHKEIT Funktionsübersicht 1. AN / AUS 2. Modus Wechsel 3. Stumm ( Schaltet Lautsprecher ab ) 4. Lautstärke Regler bzw. Menü Navigation 5. Kanal Runter
SHARK MP74 BETRIEBSANLEITUNG MIT USB & SD ABSPIELMÖGLICHKEIT Funktionsübersicht 1. AN / AUS 2. Modus Wechsel 3. Stumm ( Schaltet Lautsprecher ab ) 4. Lautstärke Regler bzw. Menü Navigation 5. Kanal Runter
[ Experiment- und Datenprotokollierung. mit der EV3 Software]
![[ Experiment- und Datenprotokollierung. mit der EV3 Software]](/thumbs/39/18075793.jpg "[ Experiment- und Datenprotokollierung. mit der EV3 Software]") 2013 [ Experiment- und Datenprotokollierung mit der EV3 Software] Experiment Datenprotokollierung Es gibt zwei Möglichkeiten um die Datenaufzeichnung durchzuführen. Eine besteht darin, die Datenprotokollierung
2013 [ Experiment- und Datenprotokollierung mit der EV3 Software] Experiment Datenprotokollierung Es gibt zwei Möglichkeiten um die Datenaufzeichnung durchzuführen. Eine besteht darin, die Datenprotokollierung
R/C Huan Qi 1:18 Big Wheels Model. Bedienungsanleitung
 R/C Huan Qi 1:18 Big Wheels Model 1 Achtung: Dieses Model ist kein Spielzeug, es ist geeignet für Personen ab 14 Jahren. Bitte nutzen Sie diese und die für die Fernbedienung. Diese ist passend für das
R/C Huan Qi 1:18 Big Wheels Model 1 Achtung: Dieses Model ist kein Spielzeug, es ist geeignet für Personen ab 14 Jahren. Bitte nutzen Sie diese und die für die Fernbedienung. Diese ist passend für das
I-PLUG Single use pdf Bedienungsanleitung
 I-PLUG Single use pdf Bedienungsanleitung Produkt: I-PLUG Single use pdf Artikelnummer: IPST8-D Produktbeschreibung: Single-use USB Temperatur Datenlogger mit Display Beschreibung: Dimensionen: 7.5 cm
I-PLUG Single use pdf Bedienungsanleitung Produkt: I-PLUG Single use pdf Artikelnummer: IPST8-D Produktbeschreibung: Single-use USB Temperatur Datenlogger mit Display Beschreibung: Dimensionen: 7.5 cm
Praktikum: KHR1 Microcontroller Steuerung Bearbeiter: Ronald Lautenschläger Betreuer: Benjamin Reh, Katja Mombaur
 Praktikum: KHR1 Microcontroller Steuerung Bearbeiter: Ronald Lautenschläger Betreuer: Benjamin Reh, Katja Mombaur Übersicht Kondo KHR1 Aufgabenstellung RCB1 Steuerungsplatine Steuerungssoftware Heart2Heart
Praktikum: KHR1 Microcontroller Steuerung Bearbeiter: Ronald Lautenschläger Betreuer: Benjamin Reh, Katja Mombaur Übersicht Kondo KHR1 Aufgabenstellung RCB1 Steuerungsplatine Steuerungssoftware Heart2Heart
Ampelsteuerung. plug & learn. mit den Modellen. CrossRoads A Y O 1 O 4. Matthias Kraus Bildungsmesse 2009 September 09
 Ampelsteuerung plug & learn 1 mit den Modellen O 1 A Y O 4 Signal Trafficlights CrossRoads Inhaltsverzeichnis 1. Einführung in das Programm RoboPro... 3 1.1. Installation des Programms und Installation
Ampelsteuerung plug & learn 1 mit den Modellen O 1 A Y O 4 Signal Trafficlights CrossRoads Inhaltsverzeichnis 1. Einführung in das Programm RoboPro... 3 1.1. Installation des Programms und Installation
Tiny. Tiny. Inhaltsverzeichnis. Vorfahrt-Tiny. Aus DC-Car-Wiki
 Tiny Aus DC-Car-Wiki Inhaltsverzeichnis 1 Tiny 1.1 Vorfahrt-Tiny 1.2 Blinklicht / StopTiny 1.3 Lauflichter 1.3.1 L1 Lauflicht 1 1.3.2 L2 Lauflicht 2 1.3.3 L3 Lauflicht 3 1.3.4 L4 Lauflicht 4 1.3.5 L5 Lauflicht
Tiny Aus DC-Car-Wiki Inhaltsverzeichnis 1 Tiny 1.1 Vorfahrt-Tiny 1.2 Blinklicht / StopTiny 1.3 Lauflichter 1.3.1 L1 Lauflicht 1 1.3.2 L2 Lauflicht 2 1.3.3 L3 Lauflicht 3 1.3.4 L4 Lauflicht 4 1.3.5 L5 Lauflicht
das ABS kontrolliert ob Fehler da sind (sieht man an den ABS Warnlampen)
") ABS-Diagnose Anleitung für ABS2- Diagnose Achtung Wenn man am ABS System arbeitet, muss man genau die Anweisungen in dieser Anleitungen befolgen. Da es sich hier um eine Bremsanlage handelt sollten nur
ABS-Diagnose Anleitung für ABS2- Diagnose Achtung Wenn man am ABS System arbeitet, muss man genau die Anweisungen in dieser Anleitungen befolgen. Da es sich hier um eine Bremsanlage handelt sollten nur
Fakultät für Informatik, Institut für Robotik Laborpraktikum I - Medizinarena Legorobotik in C EV3
 Fakultät für Informatik, Institut für Robotik Laborpraktikum I - Medizinarena Legorobotik in C EV3 Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS
Fakultät für Informatik, Institut für Robotik Laborpraktikum I - Medizinarena Legorobotik in C EV3 Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS
GPS Analogieexperiment
 Didaktik der Physik, Ruhr-Universität Bochum, www.dp.rub.de GPS Analogieexperiment Einleitung Das Global Positioning System (GPS) erlangt zunehmende Bedeutung in vielen technischen Anwendungen. Im täglichen
Didaktik der Physik, Ruhr-Universität Bochum, www.dp.rub.de GPS Analogieexperiment Einleitung Das Global Positioning System (GPS) erlangt zunehmende Bedeutung in vielen technischen Anwendungen. Im täglichen
Bedienungsanleitung SKYLed V2
 For english, please visit the download section of www.innosky.ch Bedienungsanleitung Deutsch Seite 1 Bedienungsanleitung Vielen Dank für den Kauf von SKYLed. Mit SKYLed haben Sie sich für ein höchst universelles
For english, please visit the download section of www.innosky.ch Bedienungsanleitung Deutsch Seite 1 Bedienungsanleitung Vielen Dank für den Kauf von SKYLed. Mit SKYLed haben Sie sich für ein höchst universelles
Java 8. Elmar Fuchs Grundlagen Programmierung. 1. Ausgabe, Oktober 2014 JAV8
 Java 8 Elmar Fuchs Grundlagen Programmierung 1. Ausgabe, Oktober 2014 JAV8 5 Java 8 - Grundlagen Programmierung 5 Kontrollstrukturen In diesem Kapitel erfahren Sie wie Sie die Ausführung von von Bedingungen
Java 8 Elmar Fuchs Grundlagen Programmierung 1. Ausgabe, Oktober 2014 JAV8 5 Java 8 - Grundlagen Programmierung 5 Kontrollstrukturen In diesem Kapitel erfahren Sie wie Sie die Ausführung von von Bedingungen
ArduBlock Station 4 - Farbthermometer
 Temperatur zum Leuchten bringen Wie viele Menschen haben sich schon die Finger verbrannt, weil die Herdplatte noch heiß war? Oder haben angewidert das Gesicht verzogen, weil der Tee schon kalt war? Das
Temperatur zum Leuchten bringen Wie viele Menschen haben sich schon die Finger verbrannt, weil die Herdplatte noch heiß war? Oder haben angewidert das Gesicht verzogen, weil der Tee schon kalt war? Das
HV-/Kombi-Tester F1-1x und F7-1x LGA. ELABO Service-Leistungen: Kalibrierung im Hause ELABO Kalibrierung vor Ort beim Kunden Leihgerätebeistellung
 Zertifiziert nach DIN EN ISO 9001 LGA ELABO Service-Leistungen: Kalibrierung im Hause ELABO Kalibrierung vor Ort beim Kunden Leihgerätebeistellung Hotline 07951/307-0 ELABO GmbH 74564 Crailsheim HV-/Kombi-Tester
Zertifiziert nach DIN EN ISO 9001 LGA ELABO Service-Leistungen: Kalibrierung im Hause ELABO Kalibrierung vor Ort beim Kunden Leihgerätebeistellung Hotline 07951/307-0 ELABO GmbH 74564 Crailsheim HV-/Kombi-Tester
Telemetriesender VT 100/VAT 100. Bedienungsanleitung
 Telemetriesender VT 100/VAT 100 Bedienungsanleitung 1 1. Ausgabe Deutsch November 1999 Dokumentation 1999 ELV Electonics Ltd. Alle Rechte vorbehalten. Ohne schriftliche Zustimmung des Herausgebers darf
Telemetriesender VT 100/VAT 100 Bedienungsanleitung 1 1. Ausgabe Deutsch November 1999 Dokumentation 1999 ELV Electonics Ltd. Alle Rechte vorbehalten. Ohne schriftliche Zustimmung des Herausgebers darf
Wir bauen eine Was-passiert-dann-Maschine
 Wir bauen eine Was-passiert-dann-Maschine Darunter verstehen wir eine sogenannte Rube Goldberg-Maschine. Rube Goldberg (1883-1970) ist ein ausgebildeter Ingenieur aus Kalifornien, der später als Cartoonist
Wir bauen eine Was-passiert-dann-Maschine Darunter verstehen wir eine sogenannte Rube Goldberg-Maschine. Rube Goldberg (1883-1970) ist ein ausgebildeter Ingenieur aus Kalifornien, der später als Cartoonist
Man sieht hier einzelne Fragmente, die man häufig bei der Programmierung mit Schleifen antrifft. Es gibt eine lokale Variable, die vor dem
 214 215 Man sieht hier einzelne Fragmente, die man häufig bei der Programmierung mit Schleifen antrifft. Es gibt eine lokale Variable, die vor dem Schleifenstart initialisiert und die innerhalb der Schleife
214 215 Man sieht hier einzelne Fragmente, die man häufig bei der Programmierung mit Schleifen antrifft. Es gibt eine lokale Variable, die vor dem Schleifenstart initialisiert und die innerhalb der Schleife
Einbauanleitung Spiegelmodul Für BMW E38, E39, E46 und E53-7er, 5er, 3er und X5 mit elektrisch anklappbaren Außenspiegeln
 Einbauanleitung Spiegelmodul Für BMW E38, E39, E46 und E53-7er, 5er, 3er und X5 mit elektrisch anklappbaren Außenspiegeln Lieferumfang: 1x Spiegelmodul Zusätzlich, wenn der Einbau hinter dem Handschuhfach
Einbauanleitung Spiegelmodul Für BMW E38, E39, E46 und E53-7er, 5er, 3er und X5 mit elektrisch anklappbaren Außenspiegeln Lieferumfang: 1x Spiegelmodul Zusätzlich, wenn der Einbau hinter dem Handschuhfach
MEX Regler. ESC Serie (Electronic Speed Controller) Betriebsanleitung und Installationsbeschreibung
 Betriebsanleitung und Installationsbeschreibung") MEX Regler Serie (Electronic Speed Controller) Betriebsanleitung und Installationsbeschreibung BEC (Batterie Eliminiator Circuit) Die LV und MV Serie versorgen den Empfänger mit Strom. Die notwendige Spannung
MEX Regler Serie (Electronic Speed Controller) Betriebsanleitung und Installationsbeschreibung BEC (Batterie Eliminiator Circuit) Die LV und MV Serie versorgen den Empfänger mit Strom. Die notwendige Spannung
Gebrauchsanweisung Blast XL 3.5 Kanal Hubschrauber. Alter 14+
 Gebrauchsanweisung Blast XL 3.5 Kanal Hubschrauber - Achten Sie beim Ersetzen der Batterie auf Beschädigungen des Flugzeuges - Batterie nur mit korrekter Polarität anschliessen - Bei längerem Nichtgebrauchen
Gebrauchsanweisung Blast XL 3.5 Kanal Hubschrauber - Achten Sie beim Ersetzen der Batterie auf Beschädigungen des Flugzeuges - Batterie nur mit korrekter Polarität anschliessen - Bei längerem Nichtgebrauchen
Wir übertragen Daten mit Licht
 Wir übertragen Daten mit Licht Durch das Internet werden täglich Unmengen von Daten von einem Ort an den anderen transportiert. Häufig geschieht dies über Glasfasern (Abb. 1). An dem einen Ende werden
Wir übertragen Daten mit Licht Durch das Internet werden täglich Unmengen von Daten von einem Ort an den anderen transportiert. Häufig geschieht dies über Glasfasern (Abb. 1). An dem einen Ende werden
ACHTUNG: Beim Anlernen darf jeweils nur ein Motor mit Strom versorgt sein!
 ACHTUNG: Beim Anlernen darf jeweils nur ein Motor mit Strom versorgt sein! Wichtige Hinweise: Legen Sie nach Möglichkeiten pro Kanal nur einen Motor fest. Wenn Sie mehrere Motoren pro Kanal festlegen,
ACHTUNG: Beim Anlernen darf jeweils nur ein Motor mit Strom versorgt sein! Wichtige Hinweise: Legen Sie nach Möglichkeiten pro Kanal nur einen Motor fest. Wenn Sie mehrere Motoren pro Kanal festlegen,
Einfarbiges Dimmen: Empfänger SR-2501N - Bedienungsanleitung
 Empfänger - Empfänger Bei dem Empfänger 2501N handelt es sich um ein Gerät, mit dem man -Verbraucher dimmen oder aus-/einschalten kann. Die Bedienung des Empfängers erfolgt über den Funk-Sender. Die empfangenen
Empfänger - Empfänger Bei dem Empfänger 2501N handelt es sich um ein Gerät, mit dem man -Verbraucher dimmen oder aus-/einschalten kann. Die Bedienung des Empfängers erfolgt über den Funk-Sender. Die empfangenen
Digitale Ganganzeige DA SH. Bedienungsanleitung
 Digitale Ganganzeige DA SH Bedienungsanleitung Inhaltsverzeichnis Seite 3... Über den INDY-CATOR DASH Seite 4... Inhalt der Verpackung Seite 5... Instrumentenmontage Seite 7... Programmierung Seite 9...
Digitale Ganganzeige DA SH Bedienungsanleitung Inhaltsverzeichnis Seite 3... Über den INDY-CATOR DASH Seite 4... Inhalt der Verpackung Seite 5... Instrumentenmontage Seite 7... Programmierung Seite 9...
12V DC - 36V DC 12V DC 24V DC nur LX-4471-RF
 1 RGBW Touch Funk Controller mit Touch-Wheel -LX-R401RF LEDIMAX Bedienungsanleitung Technische Daten Spannungsversorgung: 3x AAA LR03 Batterie 1,5V Betriebstemperatur: -10 C bis +60 C Lizenzfreie Funkfrequenz:
1 RGBW Touch Funk Controller mit Touch-Wheel -LX-R401RF LEDIMAX Bedienungsanleitung Technische Daten Spannungsversorgung: 3x AAA LR03 Batterie 1,5V Betriebstemperatur: -10 C bis +60 C Lizenzfreie Funkfrequenz:
Station 3 Die Roboter Fernsteuerung für Profis! Roboterfernsteuerung über den Lagesensor!
 Roboterfernsteuerung über den Lagesensor! Die erste Fernsteuerung habt ihr geschafft. Super. Und jetzt soll der Roboter auf die Bewegung eures Smartphones reagieren! Er fährt in die Richtung, in die ihr
Roboterfernsteuerung über den Lagesensor! Die erste Fernsteuerung habt ihr geschafft. Super. Und jetzt soll der Roboter auf die Bewegung eures Smartphones reagieren! Er fährt in die Richtung, in die ihr
Bedienungsanleitung WK 2601
 Bedienungsanleitung WK 2601 Betriebsanleitung WK-2601 0 IMC Trading GmbH Version 10-2008 INHALT 1. Vorwort 2 2. Bedienungsanleitung 2 3. Bedienungselemente und ihre Position.... 3 4. Umstellen von Modus
Bedienungsanleitung WK 2601 Betriebsanleitung WK-2601 0 IMC Trading GmbH Version 10-2008 INHALT 1. Vorwort 2 2. Bedienungsanleitung 2 3. Bedienungselemente und ihre Position.... 3 4. Umstellen von Modus
Programmübersicht Software EV3
 Programmübersicht Software EV3 8. 4. 2. 1. 5. 3. 6. 7. 1. Menüliste Reiter: Verwaltung der Projekte 2. Projekteigenschaften: Übersicht des Programms 3. Werkzeugliste: Programm kommentieren 4. Programmblöcke:
Programmübersicht Software EV3 8. 4. 2. 1. 5. 3. 6. 7. 1. Menüliste Reiter: Verwaltung der Projekte 2. Projekteigenschaften: Übersicht des Programms 3. Werkzeugliste: Programm kommentieren 4. Programmblöcke:
LEDIMAX. RGBW Touch Funk Fernbedienung. RGBW Funk Empfänger. mit Touch-Wheel -LX-R403RF
 1 RGBW Touch Funk Fernbedienung mit Touch-Wheel -LX-R403RF LEDIMAX Bedienungsanleitung Technische Daten Spannungsversorgung: 3x AAA LR03 Batterie 1,5V Betriebstemperatur: -10 C bis +60 C Lizenzfreie Funkfrequenz:
1 RGBW Touch Funk Fernbedienung mit Touch-Wheel -LX-R403RF LEDIMAX Bedienungsanleitung Technische Daten Spannungsversorgung: 3x AAA LR03 Batterie 1,5V Betriebstemperatur: -10 C bis +60 C Lizenzfreie Funkfrequenz:
MAC 2000 Wash Flügeltor. Handbuch
 MAC 2000 Wash Flügeltor Handbuch 2003-2004 Martin Professional A/S, Denmark. Alle Rechte vorbehalten. Kein Teil dieser Anleitung darf, egal wie, ohne schriftliche Genehmigung der Martin Professional A/S,
MAC 2000 Wash Flügeltor Handbuch 2003-2004 Martin Professional A/S, Denmark. Alle Rechte vorbehalten. Kein Teil dieser Anleitung darf, egal wie, ohne schriftliche Genehmigung der Martin Professional A/S,
S4A-Zoo. Programmieren mit Scratch in der Grundschule. von Sabine Wolff & Annelie v. Trotha betreut von Prof. E. Modrow
 S4A-Zoo Programmieren mit Scratch in der Grundschule von Sabine Wolff & Annelie v. Trotha betreut von Prof. E. Modrow Inhaltsverzeichnis 1 Anleitung 2 2 Anschließen des Arduinoboards 2 2.1 Anschließen
S4A-Zoo Programmieren mit Scratch in der Grundschule von Sabine Wolff & Annelie v. Trotha betreut von Prof. E. Modrow Inhaltsverzeichnis 1 Anleitung 2 2 Anschließen des Arduinoboards 2 2.1 Anschließen
I-PLUG Single use pdf Bedienungsanleitung
 I-PLUG Single use pdf Bedienungsanleitung Produkt: I-PLUG Single use pdf Artikelnummer: IPST8 / IPST8L (mit Display) Produktbeschreibung: Single-use USB Temperatur Datenlogger Beschreibung: Dimensionen:
I-PLUG Single use pdf Bedienungsanleitung Produkt: I-PLUG Single use pdf Artikelnummer: IPST8 / IPST8L (mit Display) Produktbeschreibung: Single-use USB Temperatur Datenlogger Beschreibung: Dimensionen:
Der CodeBug. A) Erste Schritte. 1) Einleitung
 Erste Schritte. 1) Einleitung") Der CodeBug A) Erste Schritte 1) Einleitung.) Wenn wir den CodeBug mittels USB-Kabel bei gedrückter Taste A an den Computer anschließen, blinkt die erste LED rot. Der Computer selbst erkennt ihn als einfachen
Der CodeBug A) Erste Schritte 1) Einleitung.) Wenn wir den CodeBug mittels USB-Kabel bei gedrückter Taste A an den Computer anschließen, blinkt die erste LED rot. Der Computer selbst erkennt ihn als einfachen
ElitePET ACHTUNG: Nutzen Sie nur den mitgelieferten AC-Adapter um den Empfänger zu laden. Halten Sie die Sendeantenne fern von Magneten.
 ElitePET 9888 Inhalt: Sender Antenne kleiner Empfänger (optional) großer Empfänger (optional) lange Metallstifte kurze Metallstifte Halsband Test-Kit Ladegerät ACHTUNG: Nutzen Sie nur den mitgelieferten
ElitePET 9888 Inhalt: Sender Antenne kleiner Empfänger (optional) großer Empfänger (optional) lange Metallstifte kurze Metallstifte Halsband Test-Kit Ladegerät ACHTUNG: Nutzen Sie nur den mitgelieferten
SBC-B A Doppelfahrtregler für RC-Schiffsmodelle mit Zweischraubenantrieb
 SBC-B-10 10A Doppelfahrtregler für RC-Schiffsmodelle mit Zweischraubenantrieb Der Regler beinhaltet alle Komponenten zur Ansteuerung von zwei Gleichstrommotoren in einem RC-Schiffsmodell. Der integrierte
SBC-B-10 10A Doppelfahrtregler für RC-Schiffsmodelle mit Zweischraubenantrieb Der Regler beinhaltet alle Komponenten zur Ansteuerung von zwei Gleichstrommotoren in einem RC-Schiffsmodell. Der integrierte
fischertechnik- Modelle richtig montieren
 D Roboter Einachsig 2-achsig 3-achsig fischertechnik- Modelle richtig montieren So gehst du am Besten vor: Informieren Prüfen Überlegen Ausprobieren Ausführen Und nun viel Spaß und viel Erfolg! 1 Informieren
D Roboter Einachsig 2-achsig 3-achsig fischertechnik- Modelle richtig montieren So gehst du am Besten vor: Informieren Prüfen Überlegen Ausprobieren Ausführen Und nun viel Spaß und viel Erfolg! 1 Informieren
Labor Elektrische Messtechnik
 Labor: Erstellt von: Einführung in LabVIEW Gruppe 2 Labor Termin: 09. April 2010 Abgabetermin: 21. April 2010 1 von 10 Inhaltsverzeichnis 1 FOR Schleifen 3 1.1 Versuchsaufbau von Übung 1.1.... 3 1.2 Erläuterung
Labor: Erstellt von: Einführung in LabVIEW Gruppe 2 Labor Termin: 09. April 2010 Abgabetermin: 21. April 2010 1 von 10 Inhaltsverzeichnis 1 FOR Schleifen 3 1.1 Versuchsaufbau von Übung 1.1.... 3 1.2 Erläuterung
Einbindung eines GSM-Wählgeräts in das EiMSIG smarthome Z200
 Anleitung zur Einbindung eines GSM-Wählgeräts in das EiMSIG smarthome Z200 Kurzinformationn Diese Anleitung bezieht sich auf die EiMSIG smarthome Zentrale und nicht auf das EiMSIG HausDisplay. Beachten
Anleitung zur Einbindung eines GSM-Wählgeräts in das EiMSIG smarthome Z200 Kurzinformationn Diese Anleitung bezieht sich auf die EiMSIG smarthome Zentrale und nicht auf das EiMSIG HausDisplay. Beachten
Dokumentation Roboterfahrzeug
 Dokumentation Roboterfahrzeug Gruppe 6 Sensor und Regelungssysteme Praktikum Mechatronik Master SS16 Matthias Wolf, Fabian Pfeffer Inhaltsverzeichnis Inhaltsverzeichnis Inhaltsverzeichnis... I Abbildungsverzeichnis...
Dokumentation Roboterfahrzeug Gruppe 6 Sensor und Regelungssysteme Praktikum Mechatronik Master SS16 Matthias Wolf, Fabian Pfeffer Inhaltsverzeichnis Inhaltsverzeichnis Inhaltsverzeichnis... I Abbildungsverzeichnis...
HowTo. Fehlerdiagnose/ Softwarediagnose. Fiat Punto /55PS, 1.2/75PS. Edition
 HowTo www.puntotreffen.de Edition by djculture2001 / 2013 Fehlerdiagnose/ Softwarediagnose Fiat Punto 176 1.1/55PS, 1.2/75PS Revision 01 07.05.2013 Dieses HowTo jederzeit auf dem Smartphone dabei haben
HowTo www.puntotreffen.de Edition by djculture2001 / 2013 Fehlerdiagnose/ Softwarediagnose Fiat Punto 176 1.1/55PS, 1.2/75PS Revision 01 07.05.2013 Dieses HowTo jederzeit auf dem Smartphone dabei haben
2.4GHz Digitales Sender System. Bitte lesen Sie die Anleitung, bevor Sie das Gerät in Betrieb nehmen BEDIENUNGSANLEITUNG
 2.4GHz Digitales Sender System 2.4GHz Digitales Sender System No.8228 und No.8311 XP2G & XP3G #29215 & #29216 Bitte lesen Sie die Anleitung, bevor Sie das Gerät in Betrieb nehmen Die Inhalte können sich
2.4GHz Digitales Sender System 2.4GHz Digitales Sender System No.8228 und No.8311 XP2G & XP3G #29215 & #29216 Bitte lesen Sie die Anleitung, bevor Sie das Gerät in Betrieb nehmen Die Inhalte können sich
Annährungssensoren. Induktive Sensoren. Kapazitive Sensoren. Ultraschall-Sensoren. Optische Anährungssensoren
 Annährungssensoren Zum Feststellen der Existenz eines Objektes innerhalb eines bestimmten Abstands. In der Robotik werden sie für die Nah-Gebiets-Arbeit, Objekt-Greifen oder Kollisionsvermeidung verwendet.
Annährungssensoren Zum Feststellen der Existenz eines Objektes innerhalb eines bestimmten Abstands. In der Robotik werden sie für die Nah-Gebiets-Arbeit, Objekt-Greifen oder Kollisionsvermeidung verwendet.
5. NXT kann hören und Entfernungen erkennen: Test der Sensoren
 5. NXT kann hören und Entfernungen erkennen: Test der Sensoren Mit dem NXT werden vier verschiedene Sensoren mitgeliefert. In diesem Kapitel lernst du die Funktion der Sensoren kennen. Im Fenster Robot
5. NXT kann hören und Entfernungen erkennen: Test der Sensoren Mit dem NXT werden vier verschiedene Sensoren mitgeliefert. In diesem Kapitel lernst du die Funktion der Sensoren kennen. Im Fenster Robot
Sie bauen Ihren ersten Roboter
 2 Sie bauen Ihren ersten Roboter Wie Sie in Kapitel 1 gesehen haben, besteht ein Roboter aus mehreren wichtigen Bestandteilen. Damit Sie die Funktionsweise der einzelnen Teile mühelos und Schritt für Schritt
2 Sie bauen Ihren ersten Roboter Wie Sie in Kapitel 1 gesehen haben, besteht ein Roboter aus mehreren wichtigen Bestandteilen. Damit Sie die Funktionsweise der einzelnen Teile mühelos und Schritt für Schritt
1/12. IdeenSet Robotik. Pro-Bot Aufgabenblätter. IdeenSet Robotik. PHBern 2015,
 1/12 Pro-Bot Aufgabenblätter 2/12 Synchronisiertes Rennen Ich kann eine Abfolge von Befehlen in einen Roboter eingeben, so dass dieser an einen vorher bestimmten Punkt gelangt. 1 Pro-Bot pro SuS Mehrere
1/12 Pro-Bot Aufgabenblätter 2/12 Synchronisiertes Rennen Ich kann eine Abfolge von Befehlen in einen Roboter eingeben, so dass dieser an einen vorher bestimmten Punkt gelangt. 1 Pro-Bot pro SuS Mehrere
( ) 30. Baue das Basismodel von NXT. Halte dich dabei an die bereitgestellte Bauanleitung auf der Website oder am Arbeitsplatz.
 30. Baue das Basismodel von NXT. Halte dich dabei an die bereitgestellte Bauanleitung auf der Website oder am Arbeitsplatz.") Posten: Bauen - Die SuS können das NXT Basismodel anhand der Bauanleitung 1:1 nachbauen. ( ) 30 - NXT Baukasten - Anleitung Auftrag: Baue das Basismodel von NXT. Halte dich dabei an die bereitgestellte
Posten: Bauen - Die SuS können das NXT Basismodel anhand der Bauanleitung 1:1 nachbauen. ( ) 30 - NXT Baukasten - Anleitung Auftrag: Baue das Basismodel von NXT. Halte dich dabei an die bereitgestellte
JUFOTech. WKO.at/tirol/jufotech DATENBLATT. Jugend forscht in der Technik. Titel der Projektarbeit: Roboterhand Fachgebiet: Technik-Robotertechnik
 Datenblatt (dient als Titelblatt für die Projektarbeit) Seite 1/2 JUFOTech Jugend forscht in der Technik WKO.at/tirol/jufotech DATENBLATT Wir nehmen am Wettbewerb Jugend forscht in der Technik Auf den
Datenblatt (dient als Titelblatt für die Projektarbeit) Seite 1/2 JUFOTech Jugend forscht in der Technik WKO.at/tirol/jufotech DATENBLATT Wir nehmen am Wettbewerb Jugend forscht in der Technik Auf den
(DT) ANLEITUNG SOL-EXPERT. group. Escape Roboter. Bausatz.
 ANLEITUNG SOL-EXPERT. group. Escape Roboter. Bausatz.") (DT) ANLEITUNG SOL-EXPERT group Escape Roboter Bausatz www.sol-expert-group.de (DT) Escape Roboter - Bausatz. Produkt Vorstellung: Der Escape Roboter (Flucht-Roboter) funktioniert wie ein Roboter mit künstlicher
(DT) ANLEITUNG SOL-EXPERT group Escape Roboter Bausatz www.sol-expert-group.de (DT) Escape Roboter - Bausatz. Produkt Vorstellung: Der Escape Roboter (Flucht-Roboter) funktioniert wie ein Roboter mit künstlicher
Bedienungsanleitung Smart
 Bedienungsanleitung Smart Inhalt 1. Öffnen & Schliessen... 2 1.1 Schlüssel... 2 1.2 Obere Heckklappe öffnen... 2 1.3 Untere Heckklappe öffnen... 3 1.4 Heckklappen schliessen... 3 2. Fahren... 4 2.1 Einschalten...
Bedienungsanleitung Smart Inhalt 1. Öffnen & Schliessen... 2 1.1 Schlüssel... 2 1.2 Obere Heckklappe öffnen... 2 1.3 Untere Heckklappe öffnen... 3 1.4 Heckklappen schliessen... 3 2. Fahren... 4 2.1 Einschalten...
BEDIENUNGSANLEITUNG GUNMASTER 1
 BEDIENUNGSANLEITUNG GUNMASTER 1!!ACHTUNG: Bitte lesen Sie diese Bedienungsanleitung sorgfältig durch, b e v o r Sie das Schloß betätigen oder eine neue Kombination einstellen wollen. Wir übernehmen keinerlei
BEDIENUNGSANLEITUNG GUNMASTER 1!!ACHTUNG: Bitte lesen Sie diese Bedienungsanleitung sorgfältig durch, b e v o r Sie das Schloß betätigen oder eine neue Kombination einstellen wollen. Wir übernehmen keinerlei
Was kann Easy Install für Sie tun?
 Was kann Easy Install für Sie tun? Was kann Easy Install für Sie tun? Das variable Aufhängesystem Easy Install von Projecta sorgt dafür, dass die Installation ab jetzt noch einfacher ist. Easy Install
Was kann Easy Install für Sie tun? Was kann Easy Install für Sie tun? Das variable Aufhängesystem Easy Install von Projecta sorgt dafür, dass die Installation ab jetzt noch einfacher ist. Easy Install
24 Volt TBOS 9V. Gebrauchsanweisung Steuerung Rainbird WP1 1. Impulsgesteuerte Magnetspule VERKABELUNG MIT DEM ELEKTROMAGNETVENTIL
 Gebrauchsanweisung Steuerung Rainbird WP1 1 OER Siehe Verkabelungsdiagramm 24 Volt TBOS 9V Impulsgesteuerte Magnetspule VERKABELUNG MIT EM ELEKTROMAGNETVENTIL 1-Stationen Steuergerät, zu verwenden mit
Gebrauchsanweisung Steuerung Rainbird WP1 1 OER Siehe Verkabelungsdiagramm 24 Volt TBOS 9V Impulsgesteuerte Magnetspule VERKABELUNG MIT EM ELEKTROMAGNETVENTIL 1-Stationen Steuergerät, zu verwenden mit
Der Wind- und Solarbus. VON YANNIS BAINBRIDGE 6B EMA Gymnasium Osnabrück
 Der Wind- und Solarbus VON YANNIS BAINBRIDGE 6B EMA Gymnasium Osnabrück Kurzfassung Mich faszinieren Busse, besonders die zwei Elektrobusse der Stadt Osnabrück. Durch die beiden mit Brennstoffzellen arbeitenden
Der Wind- und Solarbus VON YANNIS BAINBRIDGE 6B EMA Gymnasium Osnabrück Kurzfassung Mich faszinieren Busse, besonders die zwei Elektrobusse der Stadt Osnabrück. Durch die beiden mit Brennstoffzellen arbeitenden
LEGO WeDo: SCRATCH-Programmierung
 LEGO WeDo: SCRATCH-Programmierung Version 1.0 SCRATCH ist eine kostenlose kindergerechte Programmiersprache, die vom MIT entwickelt wurde. Vor kurzem ist die neue Version 2.0 erschienen, die direkt von
LEGO WeDo: SCRATCH-Programmierung Version 1.0 SCRATCH ist eine kostenlose kindergerechte Programmiersprache, die vom MIT entwickelt wurde. Vor kurzem ist die neue Version 2.0 erschienen, die direkt von
Mars-Rover Funktionsmodell ( speziell für den Rocker-boogie )
") Mars-Rover Funktionsmodell ( speziell für den Rocker-boogie ) Die NASA hat im Jahre 2003 zwei Missionen Richtung Mars geschickt. MER 1 und MER 2 Mars (Mars- Erforschungs- Rover), die Anfang 2004 auf dem
Mars-Rover Funktionsmodell ( speziell für den Rocker-boogie ) Die NASA hat im Jahre 2003 zwei Missionen Richtung Mars geschickt. MER 1 und MER 2 Mars (Mars- Erforschungs- Rover), die Anfang 2004 auf dem
Bavarian Technic unterstützt die Aktivierung von Komponenten, die von Steuergeräten im Fahrzeug gesteuert werden.
 Aktivierungen Bavarian Technic unterstützt die Aktivierung von Komponenten, die von Steuergeräten im Fahrzeug gesteuert werden. Aktivierungen sind hilfreich um Komponenten zu starten, die z.b. getestet
Aktivierungen Bavarian Technic unterstützt die Aktivierung von Komponenten, die von Steuergeräten im Fahrzeug gesteuert werden. Aktivierungen sind hilfreich um Komponenten zu starten, die z.b. getestet
Flappy Bird Greenfoot Station 1: Flappy erstellen und bewegen
 Flappy Bird Greenfoot Station : Flappy erstellen und bewegen In diesem Arbeitsblatt geht es darum, dass bekannte Spiel Flappy Bird zu erstellen, indem das Spielfeld erstellt wird. Flappy erstellt wird.
Flappy Bird Greenfoot Station : Flappy erstellen und bewegen In diesem Arbeitsblatt geht es darum, dass bekannte Spiel Flappy Bird zu erstellen, indem das Spielfeld erstellt wird. Flappy erstellt wird.
SRW Mitterfelner Fasanenweg Forstinning - Tel:
 SRW Mitterfelner Fasanenweg 2-85661 Forstinning - Tel: 08121 41321 - email: info@srw-hydro.de Nachdruck aus: Schleusensteuerung mit Kleinst-SPS Wasserkraft & Energie Nr. 3/2004 Verlag Moritz Schäfer Paulinenstraße
SRW Mitterfelner Fasanenweg 2-85661 Forstinning - Tel: 08121 41321 - email: info@srw-hydro.de Nachdruck aus: Schleusensteuerung mit Kleinst-SPS Wasserkraft & Energie Nr. 3/2004 Verlag Moritz Schäfer Paulinenstraße