Differentialgeometrie. Lehre Differentialgeometrie
|
|
|
- Käte Hauer
- vor 6 Jahren
- Abrufe
Transkript

1 Differentialgeometrie 1.1 Differentialgeometrie Lehre Differentialgeometrie

 Beispiel Seifenhäute lassen sich als Minimalflächen beschreiben.")
2 Differentialgeometrie 1.2 Differentialgeometrie?! Elementare Differentialgeometrie Ziel: Untersuchung lokaler Eigenschaften von Kurven und zweidimensional gekrümmten Flächen im dreidimensionalen reellen Anschauungsraum R 3 Quantitatives Erfassen der Krümmung von zweidimensional gekrümmten Flächen (z. B. Oberfläche einer Kugel) Beispiel Seifenhäute lassen sich als Minimalflächen beschreiben. Ihre geometrischen Eigenschaften (Krümmung, Abstände zwischen Punkten auf der Minimalfläche, ) können mit Methoden der Differentialgeometrie berechnet werden.
3 Differentialgeometrie 1.3 Differentialgeometrie?! Moderne Differentialgeometrie Ziel: Intrinsische Beschreibung geometrischer Objekte, d.h. Beschreibung ohne Rückgriff auf den umgebenden Raum Zentraler Begriff: Mannigfaltigkeiten Anwendungen Kartografie Navigation (Satellitennavigation) Geodäsie Wissenschaft von der Ausmessung und Abbildung der Erdoberfläche Allgemeine Relativitätstheorie
4 Differentialgeometrie 1.4 Inhaltsverzeichnis Differentialgeometrie 1 Euklidische Geometrie 2 Kurventheorie 3 Klassische Flächentheorie 4 Innere Geometrie von Flächen 5 Geometrie und Topologie
5 Differentialgeometrie 1.5 Differentialgeometrie Kapitel 1: Euklidische Geometrie
6 Differentialgeometrie 1.6 Inhaltsverzeichnis Kapitel 1: Euklidische Geometrie 1.1 Geometrie?! 1.2 Axiome der ebenen euklidischen Geometrie 1.2 Das kartesische Modell
7 Differentialgeometrie 1.7 Kapitel 1: Euklidische Geometrie 1.1 Geometrie?!
8 Differentialgeometrie 1.8 Geometrie?! Geometrie ist die Wissenschaft vom uns umgebenden Raum. Geometrie ist das älteste mathematische Teilgebiet. Über viele Jahrhunderte hinweg bestand die Mathematik im wesentlichen aus Geometrie. Ägypter & Babylonier (ab 3000 v. Chr.): Geometrie ist eine Naturwissenschaft. Man fragte nicht nach logischer Ableitbarkeit, sondern nach Übereinstimmung mit der Realität. Man wusste zum Beispiel, wie man rechte Winkel konstruieren konnte, und das reichte.
9 Differentialgeometrie 1.9 Geometrie als erste (deduktive) Wissenschaft Die alten Griechen entdeckten die Macht des Denkens, die Logik und damit auch die Möglichkeit der Mathematik. Man kann durch reines Denken Erkenntnisse erzielen! Das Denken folgt gewissen Regeln, den Gesetzen der Logik. Wenn die Voraussetzungen eines logischen Schlusses gegeben sind, dann gilt automatisch auch die Folgerung. Die Elemente des Euklid sind streng deduktiv aufgebaut. Es wird zwischen Grundbegriffen und definierten Begriffen unterschieden. Ausgehend von wenigen Grundsätzen (Axiomen) werden durch logisches Schließen Folgesätze bewiesen. more geometrico Im Mittelalter in allen universitären Disziplinen Ausdruck für streng logisch ( wissenschaftlich ) aufgebaute Argumentationsketten.
10 Differentialgeometrie 1.10 Geometrie und Wirklichkeit Platon ( v. Chr.) Es gibt zwei Welten: die Welt der Ideen (die eigentliche Welt) und die Welt der Erscheinungen (die nur ein Abbild/Schatten der Idealen Welt ist). Immanuel Kant ( ) Geometrie ist ein Produkt unseres Verstandes: synthetische Urteile a priori. David Hilbert ( ): Es werden nicht die Objekte definiert (Es wird z. B. nicht erklärt was ein Punkt ist!), sondern nur die Spielregeln festgelegt, also wie mit den Objekten umzugehen ist. Man muss jederzeit an Stelle von Punkte, Geraden, Ebenen Tische, Stühle, Bierseidel sagen können.

11 Differentialgeometrie 1.11 Anschauung, Begriffe und Ideen Hilbert: Grundlagen der Geometrie. Leipzig, 1899 So fängt denn alle menschliche Erkenntnis mit Anschauung an, geht von da zu Begriffen und endigt mit Ideen. Kant: Kritik der reinen Vernunft, Elementarlehre T. 2. Abt. 2. David Hilbert ( ) Die Geometrie bedarf ( ) zu ihrem folgerichtigen Aufbau nur weniger einfach Grundsätze. Diese Grundsätze heißen Axiome der Geometrie. Die Aufstellung der Axiome der Geometrie ( ) läuft auf die logische Analyse unserer räumlichen Anschauung hinaus. Hilbert: Grundlagen der Geometrie. Einleitung
12 Differentialgeometrie 1.12 Kapitel 1: Euklidische Geometrie 1.2 Axiome der ebenen euklidischen Geometrie
13 Axiome der ebenen euklidischen Geometrie Differentialgeometrie 1.13 Daten für den axiomatischen Aufbau Menge P, deren Elemente Punkte heißen. Menge G, deren Elemente Geraden heißen. Relation zwischen P und G Dreistellige Relation zwischen auf P Relation 1 auf der Menge der Strecken (Streckenkongruenz) Relation 2 auf der Menge der Winkel (Winkelkongruenz) Gruppen der Axiome Inzidenzaxiome Anordnungsaxiome Kongruenzaxiome Parallelenaxiom Vollständigkeitsaxiome
14 Inzidenzaxiome Axiom I 1 Durch je zwei Punkte verläuft eine Gerade. p,q P L G p L q L Axiom I 2 Durch je zwei verschiedene Punkte verläuft höchstens eine Gerade. p,q P, p q L,M G p, q L p, q M L = M p L q Jürgen Roth Axiom I 3 Jede Gerade enthält mindestens zwei verschiedene Punkte. L G p,q P, p q p L q L Axiom I 4 Es gib drei Punkte, die nicht auf einer Geraden liegen. p,q,r P L G p L q L r L Differentialgeometrie 1.14 p r q
15 Anordnungsaxiome Jürgen Roth Axiom A 1 Wenn q zwischen p und r liegt, dann sind p, q und r drei paarweise verschiedene Punkte auf einer Geraden. p q Axiom A 2 Wenn q zwischen p und r liegt, dann liegt q auch zwischen r und p. Axiom A 3 Zu je zwei verschiedenen Punkten p und q gibt es einen Punkt r, so dass q zwischen p und r liegt. r Axiom A 4 Unter je drei Punkten liegt höchstens einer zwischen den beiden anderen. Axiom A 5 (Axiom von Pasch) Seien p, q und r drei Punkte, die nicht auf einer Geraden liegen und L eine Gerade, die keinen dieser drei Punkte enthält. Wenn L die Strecke pq schneidet, dann schneidet sie auch genau L eine der beiden anderen Strecken pr oder qr. p Differentialgeometrie 1.15 r q
16 Differentialgeometrie 1.16 Strecke, Schneiden und Lage Bezeichnungen Zu je zwei Punkten p und q heißt die Menge aller Punkte, die zwischen p und q liegt die Strecke pq. Haben zwei Geraden L und M einen Punkt p gemeinsam, gilt also p L p M, dann spricht man davon, dass L und M sich schneiden (L M ). Eine Strecke pr und eine Gerade L schneiden sich, wenn es einen Punkt q zwischen p und r gibt, mit q L. Zwei Geraden L und M, die identisch sind (L = M) oder sich nicht schneiden (L M = ), heißen parallel. p ist ein Punkt auf der Geraden L. q und r sind zwei weitere Punkte auf L und beide ungleich p. q und r liegen genau dann auf derselben Seite des Punktes p, wenn p nicht zwischen q und r liegt. L ist eine Gerade. p und q sind zwei Punkte, die nicht auf L liegen. p und r liegen genau dann auf derselben Seite der Geraden L, wenn pq die Gerade L nicht schneidet.
 Zu einer Strecke pq und einer Geraden L 1 mit p 1, r 1 L 1, p 1 r 1 gibt es einen Punkt q 1 L 1 auf derselben Seite von")
 Sind die Strecken p 1 q 1 und p 2 q 2 jeweils kongruent zur Strecke pq, dann ist auch p 1 q 1 kongruent zu p 2 q 2.")
17 Differentialgeometrie 1.17 Kongruenzaxiome Axiom K 1 (Streckenabtragung) Zu einer Strecke pq und einer Geraden L 1 mit p 1, r 1 L 1, p 1 r 1 gibt es einen Punkt q 1 L 1 auf derselben Seite von p 1 wie r 1, so dass pq kongruent zu p 1 q 1 ist. Axiom K 2 (Transitivität der Streckenkongruenz) Sind die Strecken p 1 q 1 und p 2 q 2 jeweils kongruent zur Strecke pq, dann ist auch p 1 q 1 kongruent zu p 2 q 2. p 1 q 1 pq p 2 q 2 pq p 1 q 1 p 2 q 2 Axiom K 3 (Addierbarkeit von Strecken) Wenn p, q, r L und p 1, q 1, r 1 L 1 jeweils drei paarweise verschiedene Punkte auf den Geraden L bzw. L 1 und pq qr = sowie p 1 q 1 q 1 r 1 = sind, dann gilt: pq p 1 q 1 qr q 1 r 1 pr p 1 r 1
18 Differentialgeometrie 1.18 Winkel Definition Ein Winkel ist eine Äquivalenzklasse von Tripeln von Punkten p, q und r, die nicht auf einer gemeinsamen Geraden liegen. Für die Äquivalenzklasse p, q, r schreibt man p, q, r. Der Punkt q heißt dann Scheitel des Winkels. Zwei Winkel p, q, r und p 1, q 1, r 1 sind äquivalent, wenn i. q = q 1 ii. L p, q = L(p 1, q 1 ) und p und p 1 liegen auf derselben Seite von q iii. L r, q = L(r 1, q 1 ) und r und r 1 liegen auf derselben Seite von q oder wenn i. q = q 1 ii. L p, q = L(r 1, q) und p und r 1 liegen auf derselben Seite von q iii. L r, q = L(p 1, q) und r und p 1 liegen auf derselben Seite von q
 p, q, r und p 1, q 1, s 1 sind jeweils Punkte, die nicht auf einer gemeinsamen Gerade liegen.")
19 Differentialgeometrie 1.19 Kongruenzaxiome Axiom K 4 Die Kongruenz von Winkeln ist eine Äquivalenzrelation auf der Menge der Winkel. Axiom K 5 (Winkelabtragung) p, q, r und p 1, q 1, s 1 sind jeweils Punkte, die nicht auf einer gemeinsamen Gerade liegen. Dann gibt es einen Punkt r 1 auf der selben Seite von L(p 1, q 1 ) wie s 1, so dass der Winkel p 1, q 1, r 1 kongruent zum Winkel p, q, r ist. Ist r 2 ein weiterer Punkt mit denselben Eigenschaften wie r 1, d. h. liegt r 2 ebenfalls auf derselben Seite von L p 1, q 1 wie s 1 und gilt p 1, q 1, r 2 p, q, r, dann ist p 1, q 1, r 1 = p 1, q 1, r 2.
 (q 1, p 1, r 1 ), dann gilt auch (p, q, r) (p 1, q 1, r 1 ).")
20 Kongruenzaxiome Parallelenaxiom Differentialgeometrie 1.20 Axiom K 6 p, q, r und p 1, q 1, r 1 sind jeweils Punkte, die nicht auf einer gemeinsamen Gerade liegen. Gilt pq p 1 q 1, pr p 1 r 1 und (q, p, r) (q 1, p 1, r 1 ), dann gilt auch (p, q, r) (p 1, q 1, r 1 ). Axiom P (Parallelenaxiom) Ist L eine Gerade und p ein Punkt der nicht auf L liegt, dann gibt es höchstens eine Gerade, die p enthält und L nicht schneidet.
 Wenn zwei Strecken pq und rs gegeben sind, dann existiert immer eine natürliche Zahl n, so dass die Strecke ps n die durch nmaliges Abtragen")
21 Differentialgeometrie 1.21 Vollständigkeitsaxiome Axiom V 1 (Archimedisches Axiom) Wenn zwei Strecken pq und rs gegeben sind, dann existiert immer eine natürliche Zahl n, so dass die Strecke ps n die durch nmaliges Abtragen der Strecke rs von p aus auf L p, q in Richtung q entsteht, die Strecke pq enthält. Axiom V 2 (Maximalität) Wenn P, G,, zwischen, 1, 2 eine Erweiterung der vorliegenden Geometrie ist, dann ist P = P und G = G.
22 Differentialgeometrie 1.22 Kapitel 1: Euklidische Geometrie 1.3 Das kartesische Modell
23 Differentialgeometrie 1.23 Idee Probleme der euklidischen Geometrie Selbst Beweise zu relativ einfachen Sachverhalte können kompliziert sein Behandlung von geometrischen Objekten, die sich nicht aus Strecken, Kreisbögen usw. zusammensetzen ist relativ aufwändig Idee von René Descartes ( ) Punkte werden durch Koordinaten charakterisiert, die die Lage der Punkte in der Ebene beschreiben. Vorteil: Methoden der Algebra und der Infinitesimalrechnung können eingesetzt werden um Probleme zu lösen
24 Differentialgeometrie 1.24 Punkte und Geraden Definition Für die Punktmenge P gilt: P R 2 Geraden sind Punktmengen der Form L = L p,v x R 2 x = p + t v mit t R mit p, v R 2 und v 0. Für die Menge G der Geraden gilt: G L p,v p, v R 2, v 0 Ein Punkt p ist in einer Geraden L enthalten (liegt auf einer Geraden L), wenn p ein Element der Menge der Punkte der Geraden L ist: p L Ein Punkt q R 2 liegt zwischen zwei verschiedenen Punkten p und r R 2, wenn es ein t 0, 1 gibt, mit q = t p + (1 t) r. Übungen Zeigen Sie die Gültigkeit der Axiome I 1 bis I 4 und A 1 bis A 4.
25 Differentialgeometrie 1.25 Beispiel Beispiel Die in Definition definierten Punkte und Geraden erfüllen das Inzidenzaxiom I 1. Nachweis: Behauptung: Zwei Punkte p = x p y p und q = x q y q liegen immer auf der Geraden L(t) = p + t q p = x p y p Beweis: + t x q x p y q y p. p L, da L 0 = x p y p = p q L, da L 1 = x p+1 x q x p y p +1 y q y p = x q y q = q #
26 Differentialgeometrie 1.26 Euklidische Bewegungsgruppe Bemerkung Die Kongruenzbeziehungen werden über Abbildungen definiert, die auf der Menge P der Punkte operieren. Definition A O(n) ist eine orthogonale Matrix (d.h. sie erfüllt die Gleichung A A T = Id, wobei A T die zu A transponierte Matrix ist) und b R n. Die Abbildung F A,b : R n R n, x F A,b x heißt dann euklidische Bewegung. Der Vektor b wird Translationsanteil genannt. A ist die Drehmatrix. = Ax + b Bei festgehaltener Dimension n nennt man die Menge aller euklidischen Bewegungen E n F A,b A O n, b R n euklidische Bewegungsgruppe.
27 Differentialgeometrie 1.27 Beispiel Bemerkung Die euklidische Bewegungsgruppe bildet zusammen mit der Verkettung (Komposition) eine Gruppe E n, mit Id = F Id,0 als neutralem Element. Beweis: Assoziativität F A,b F B,c F C,d x = F A,b F B,c F C,d x = F A,b F B,c Cx + d = F A,b BCx + Bd + c = ABCx + ABd + Ac + b = F ABC,ABd+Ac+b (x) Übung: Zeigen Sie, dass Axiom von Pasch (A 5 ) erfüllt wird. F A,b F B,c F C,d x = F A,b F B,c F C,d x = F A,b F B,c Cx + d = F AB,Ac+b Cx + d = ABCx + ABd + Ac + b = F ABC,ABd+Ac+b (x) Neutrales Element FA,b E n F Id,0 F A,b = F IdA,Idb+0 = F A,b Inverses Element FA,b E n F 1 A,b F A,b = F A 1, A 1 b F A,b = F A 1 A,A 1 b A 1 b = F Id,0 #
28 Kongruenz von Strecken und Winkeln Differentialgeometrie 1.28 Definition Zwei Strecken pq und rs heißen kongruent, wenn es eine euklidische Bewegung F E(2) gibt, so dass gilt: F p F(q) = rs Zwei Winkel (p, q, r) und (p 1, q 1, r 1 ) heißen kongruent, wenn es eine euklidische Bewegung F E(2) gibt, so dass gilt: F(p), F(q), F(r) = (p 1, q 1, r 1 ) Übung Zeigen Sie die Gültigkeit folgender Axiome: Kongruenzaxiome K 1 bis K 6, Parallelenaxiom P, Archimedischen Axioms V 1. Bemerkung Einen Beweis für die Gültigkeit des Maximalitätsaxioms V 2 findet man in Bär (2010, S. 17ff).
29 Differentialgeometrie 1.29 Skalarprodukt Bemerkungen Die Axiome der ebenen Geometrie gelten also für das kartesische Modell und sind insbesondere widerspruchsfrei. In diesem Modell steht die gesamte Differential- und Integralrechnung zur Verfügung, wodurch auch die Behandlung der euklidischen Trigonometrie vergleichsweise einfach wird. Bezeichnung Für zwei Punkte x = x 1 x n, y = y 1 y n R n bezeichnet x, y das Standardskalarprodukt auf dem R n : Beispiel x, y Für a = n i=1 x i y i, b = R 3 ergibt sich: a, b = = 32
30 Differentialgeometrie 1.30 Norm Bezeichnung Für einen Punkt x = x 1 x n R n bezeichnet x die Norm auf dem R n : x x, x = x i 2 n i=1 Beispiel Für x = R 3 ergibt sich: x = = = 5
31 Differentialgeometrie 1.31 Innenwinkel Bezeichnung Für drei verschiedene Punkte x, y, z R 2, die nicht auf einer Geraden liegen, gilt nach der Cauchy-Schwarz-Ungleichung: y x, z x y x z x Daraus folgt: y x, z x y x z x 1 Da cos: 0, π 1,1 bijektiv ist, lässt sich der Innenwinkel bei x als die eindeutige Zahl γ 0, π definieren für die gilt: y x, z x cos γ = y x z x Übung Zeigen Sie: Zwei Winkel sind genau dann kongruent, wenn Sie denselben Innenwinkel besitzen.
32 Differentialgeometrie 1.32 Kosinussatz Satz (Kosinussatz der euklidischen Geometrie) p, q, r R 2 sind die Eckpunkte eines Dreiecks mit den Seitenlängen a = p q, b = p r und c = q r. Wenn γ der Innenwinkel an der Ecke p ist, dann gilt: c 2 = a 2 + b 2 2ab cos(γ) Beweis Sei o.b.d.a. p = 0 0, q = a 0 und r = x y. Wahl eines geeigneten Koordinatensystems! Oder: Ausgangsdreieck durch eine geeignete Bewegung auf das Dreieck mit den genannten Eckpunkten abbilden. Da Bewegungen Längen und Winkelgrößen erhalten, ändern sich dadurch die Ergebnisse nicht.
 r = x y p = 0 q = a 0 0 Außerdem gilt: cos (γ) = = p=0 Daraus folgt: q p,r p q p r p q,r q r = ax+0 y a b = ax ab ax = ab cos (γ) (**) Es")
33 Differentialgeometrie 1.33 Kosinussatz Beweis (Fortsetzung) r = x y p = 0 q = a 0 0 Außerdem gilt: cos (γ) = = p=0 Daraus folgt: q p,r p q p r p q,r q r = ax+0 y a b = ax ab ax = ab cos (γ) (**) Es gilt: c 2 = q r 2 = a x 0 y = a x 2 + y 2 = a 2 2ax + x 2 + y 2 b 2 = a 2 + b 2 2ax (*) 2 Mit (*) und (**) ergibt sich: c 2 = a 2 + b 2 2ab cos (γ) #

34 Differentialgeometrie 1.34 lat. corollarium = die Zugabe, das Geschenk Satz des Pythagoras Sinussatz Korollar (Satz des Pythagoras) p, q, r R 2 sind die Eckpunkte eines Dreiecks mit den Seitenlängen a = p q, b = p r und c = q r. Wenn für den Innenwinkel γ an der Ecke p gilt γ = π, dann folgt: 2 c 2 = a 2 + b 2 Beweis: Mit cos π = 0 und dem Kosinussatz ergibt sich: 2 c 2 = a 2 + b 2 2ab 0 = a 2 + b 2 # Satz (Sinussatz der euklidischen Geometrie) p, q, r R 2 sind die Eckpunkte eines Dreiecks mit den Seitenlängen a = p q, b = p r und c = q r. Wenn α der Innenwinkel an der Ecke r und β der Innenwinkel an der Ecke r ist, dann gilt: a sin (α) = b sin (β)
35 Differentialgeometrie 1.35 Sinussatz Beweis (Sinussatz) Zu zeigen ist: sin (α) sin (β) = a b Bisher ist nur der Kosinus (über den Kosinussatz) bekannt. Zusammenhang zwischen Sinus und Kosinus: sin 2 (x) + cos 2 (x) = 1 sin 2 (x) = 1 cos 2 (x) Mit dem Kosinussatz ergibt sich: sin 2 (α) = 1 cos 2 (α) = 1 a2 b 2 +c 2 2bc = 4b2 c 2 a 2 b 2 +c 2 2 4b 2 c 2 Analog ergibt sich: sin 2 (β) = 4a2 c 2 b 2 a 2 +c 2 2 Daraus folgt: 2 4a 2 c 2 sin 2 (α) = a2 4b2c2 a2 b2 +c2 2 sin 2 (β) b 2 4a 2 c 2 b 2 a 2 +c 2 2 = a2 2a2 b 2 +2a 2 c 2 +2b 2 c 2 a 4 b 4 c 4 b 2 2a 2 b 2 +2a 2 c 2 +2b 2 c 2 a 4 b 4 c 4 = a2 b 2 Also gilt: sin (α) sin (β) = a b #
 Für die Summe der Innenwinkel α, β, γ im euklidischen Dreieck gilt: α + β + γ = π Beweis: Siehe Bär (2010, S.")
36 Satz des Pythagoras Sinussatz Differentialgeometrie 1.36 Satz (Innenwinkelsumme im euklidischen Dreieck) Für die Summe der Innenwinkel α, β, γ im euklidischen Dreieck gilt: α + β + γ = π Beweis: Siehe Bär (2010, S. 22f) Übung Zeigen Sie: In einem Dreieck mit den Seitenlängen a, b, c gilt für den Innenwinkel α: tan 2 α a b + c a + b c = 2 a + b + c a + b + c Hinweis: Zeigen und benutzen Sie: tan 2 t = 1 cos (2t) 1+cos (2t)

37 Sphärische Geometrie Jürgen Roth Bemerkungen Die sphärische Geometrie ist die Geometrie auf einer Kugeloberfläche. Die zugehörige Punktmenge P lässt sich wie folgt festlegen: P S 2 x y z R 3 x 2 + y 2 + z 2 = 1 S 2 wird zweidimensionale Sphäre genannt. Geraden kann man in der Ebene als die kürzeste Verbindung zwischen zwei Punkten charakterisieren. Die kürzeste Verbindung zweier verschiedener (nicht antipodaler) Punkte der Sphäre liegen auf dem Großkreis durch die beiden Punkte. Ein Großkreis ist die Schnittmenge eines zweidimensionalen Untervektorraums von R 3 (also einer Ebene die 0 enthält) mit S 2. Die Menge G der Geraden lässt sich damit wie folgt definieren: G S 2 E E ist zweidimensionaler Untervektorraum des R 3. Die Inzidenzrelation ist mengentheoretisch erklärt ( ist Element von ). Differentialgeometrie 1.37


38 Großkreis Jürgen Roth Großkreis kein Großkreis = Kleinkreis Differentialgeometrie 1.38
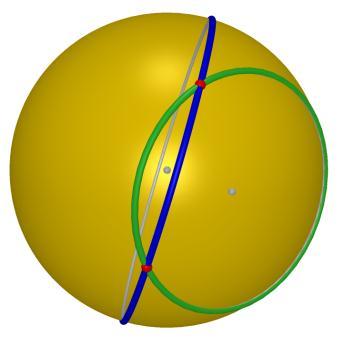
39 Differentialgeometrie 1.39 Großkreis

 definieren.")
40 Differentialgeometrie 1.40 Sphärische Geometrie Aufgaben Welche der Axiome I 1 bis I 4 gelten? Was ist eine Strecke? Welche der Axiome A 1 bis A 5 gelten? Zeigen Sie, dass die Axiome K 1 bis K 6 gelten. Bemerkungen Kongruenzrelationen lassen sich über die Orthogonale Gruppe O(3) definieren. Für A O(3) und p S 2 folgt Ap S 2. Es gibt keine Parallelen, da sich Großkreise immer schneiden.
Geometrie 0.1. Homepage zur Veranstaltung: Lehre Geometrie
 Geometrie 0.1 Geometrie Homepage zur Veranstaltung: http://www.juergen-roth.de Lehre Geometrie Geometrie 0.2 Inhaltsverzeichnis Geometrie 0 Geometrie!? 1 Axiome der Elementargeometrie 2 Kongruenzabbildungen
Geometrie 0.1 Geometrie Homepage zur Veranstaltung: http://www.juergen-roth.de Lehre Geometrie Geometrie 0.2 Inhaltsverzeichnis Geometrie 0 Geometrie!? 1 Axiome der Elementargeometrie 2 Kongruenzabbildungen
Elementargeometrie. Vorlesung von Prof. Dr. C. Bär Universität Potsdam Wintersemester 2005/2006
 Elementargeometrie Vorlesung von Prof. Dr. C. Bär Universität Potsdam Wintersemester 2005/2006 Stand vom 10. Juli 2006 Inhaltsverzeichnis 1 Ebene Geometrien 1 1.1 Axiomatische euklidische Geometrie................
Elementargeometrie Vorlesung von Prof. Dr. C. Bär Universität Potsdam Wintersemester 2005/2006 Stand vom 10. Juli 2006 Inhaltsverzeichnis 1 Ebene Geometrien 1 1.1 Axiomatische euklidische Geometrie................
Geometrie 1.1. Homepage zur Veranstaltung: Lehre Geometrie
 Geometrie 1.1 Geometrie Homepage zur Veranstaltung: http://www.juergen-roth.de Lehre Geometrie Geometrie 1.2 Inhaltsverzeichnis Geometrie 1 Axiome der Elementargeometrie der Ebene 2 Kongruenzabbildungen
Geometrie 1.1 Geometrie Homepage zur Veranstaltung: http://www.juergen-roth.de Lehre Geometrie Geometrie 1.2 Inhaltsverzeichnis Geometrie 1 Axiome der Elementargeometrie der Ebene 2 Kongruenzabbildungen
Geometrie 1.1. Homepage zur Veranstaltung: Lehre Geometrie
 Geometrie 1.1 Geometrie Homepage zur Veranstaltung: http://www.juergen-roth.de Lehre Geometrie Geometrie 1.2 Inhaltsverzeichnis Geometrie 0 Geometrie!? 1 Axiome der Elementargeometrie 2 Kongruenzabbildungen
Geometrie 1.1 Geometrie Homepage zur Veranstaltung: http://www.juergen-roth.de Lehre Geometrie Geometrie 1.2 Inhaltsverzeichnis Geometrie 0 Geometrie!? 1 Axiome der Elementargeometrie 2 Kongruenzabbildungen
Wiederholungsblatt Elementargeometrie LÖSUNGSSKIZZE
 Wiederholungsblatt Elementargeometrie im SS 01 bei Prof. Dr. S. Goette LÖSUNGSSKIZZE Die Lösungen unten enthalten teilweise keine vollständigen Rechnungen. Es sind aber alle wichtigen Zwischenergebnisse
Wiederholungsblatt Elementargeometrie im SS 01 bei Prof. Dr. S. Goette LÖSUNGSSKIZZE Die Lösungen unten enthalten teilweise keine vollständigen Rechnungen. Es sind aber alle wichtigen Zwischenergebnisse
Elementare Geometrie - Die Gerade & das Dreieck Teil I
 Proseminar zur Linearen Algebra und Elementargeometrie Elementare Geometrie - Die Gerade & das Dreieck Teil I Eingereicht von: Alexandra Kopp 178294 alexandra.kopp@tu-dortmund.de Eingereicht bei: Prof.
Proseminar zur Linearen Algebra und Elementargeometrie Elementare Geometrie - Die Gerade & das Dreieck Teil I Eingereicht von: Alexandra Kopp 178294 alexandra.kopp@tu-dortmund.de Eingereicht bei: Prof.
Didaktik der Analysis und der Analytischen Geometrie/ Linearen Algebra
 A. Filler[-3mm] Didaktik der Analysis und der Analytischen Geometrie/ Linearen Algebra, Teil 8 Folie 1 /27 Didaktik der Analysis und der Analytischen Geometrie/ Linearen Algebra 8. Das Skalarprodukt, metrische
A. Filler[-3mm] Didaktik der Analysis und der Analytischen Geometrie/ Linearen Algebra, Teil 8 Folie 1 /27 Didaktik der Analysis und der Analytischen Geometrie/ Linearen Algebra 8. Das Skalarprodukt, metrische
Ebene und. Gerade, 2. Punkte A, B, C,..., die auf einer Geraden liegen, heißen kollinear.
 16 3 Das Axiomensystem Motiviert von den Elementen des Euklid, wollen wir jetzt ein modernes Axiomensystem für die Ebene Geometrie aufstellen. Zum ersten Mal wurde das um 1900 von David Hilbert geleistet,
16 3 Das Axiomensystem Motiviert von den Elementen des Euklid, wollen wir jetzt ein modernes Axiomensystem für die Ebene Geometrie aufstellen. Zum ersten Mal wurde das um 1900 von David Hilbert geleistet,
Elementare Differentialgeometrie
 Elementare Differentialgeometrie Inhaltsverzeichnis Kapitel 1. Euklidische und andere Geometrien 1 1.1. Axiome der Euklidischen Ebene 1 1.2. Das Kartesische Modell der Euklidischen Geometrie 6 1.3. Sphärische
Elementare Differentialgeometrie Inhaltsverzeichnis Kapitel 1. Euklidische und andere Geometrien 1 1.1. Axiome der Euklidischen Ebene 1 1.2. Das Kartesische Modell der Euklidischen Geometrie 6 1.3. Sphärische
Physikalischer Raum. Euklidischer Raum
 Physikalischer Raum Aus unserer Erfahrung schreiben wir dem Raum intuitiv bestimmte Eigenschaften zu. Intuition ist aber nicht ausreichend zum Aufbau einer Theorie. Es bedarf vielmehr einer präzisen mathematischen
Physikalischer Raum Aus unserer Erfahrung schreiben wir dem Raum intuitiv bestimmte Eigenschaften zu. Intuition ist aber nicht ausreichend zum Aufbau einer Theorie. Es bedarf vielmehr einer präzisen mathematischen
Klausurenkurs zum Staatsexamen (WS 2015/16): Lineare Algebra und analytische Geometrie 7
: Lineare Algebra und analytische Geometrie 7") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 5/6): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr 5, Thema, Aufgabe ) Sei V ein reeller Vektorraum. a) Wann nennt man eine Teilmenge U
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 5/6): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr 5, Thema, Aufgabe ) Sei V ein reeller Vektorraum. a) Wann nennt man eine Teilmenge U
Zwillinge von Archimedes (1)
") Zwillinge von Archimedes (1) Zwillinge von Archimedes (2) Zwillinge von Archimedes (3) DIDAKTIK DER GEOMETRIE Elementargeometrie 2 Prof. Heinz Klemenz Universität Zürich, Kantonsschule Rychenberg Winterthur
Zwillinge von Archimedes (1) Zwillinge von Archimedes (2) Zwillinge von Archimedes (3) DIDAKTIK DER GEOMETRIE Elementargeometrie 2 Prof. Heinz Klemenz Universität Zürich, Kantonsschule Rychenberg Winterthur
1 Angeordnete Körper und Anordnung
 1 ANGEORDNETE KÖRPER UND ANORDNUNG 1 1 Angeordnete Körper und Anordnung Die nächste Idee, die wir interpretieren müssen ist die Anordnung. Man kann zeigen, dass sie nicht über jeden Körper möglich ist.
1 ANGEORDNETE KÖRPER UND ANORDNUNG 1 1 Angeordnete Körper und Anordnung Die nächste Idee, die wir interpretieren müssen ist die Anordnung. Man kann zeigen, dass sie nicht über jeden Körper möglich ist.
Übersicht zur Vorlesung
 Stand: 19.1.2012 Übersicht zur Vorlesung Ausgewählte Kapitel der Geometrie Definitionen/Axiome Anordnungsaxiome Archimedisches Axiom Definition von größer in den reellen Zahlen Intervalle Punkte, Geraden
Stand: 19.1.2012 Übersicht zur Vorlesung Ausgewählte Kapitel der Geometrie Definitionen/Axiome Anordnungsaxiome Archimedisches Axiom Definition von größer in den reellen Zahlen Intervalle Punkte, Geraden
1 Analytische Geometrie und Grundlagen
 $Id: vektor.tex,v 1.22 2017/05/15 15:10:33 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.5 Abstände und Winkel In der letzten Sitzung haben wir einen orientierten Winkelbegriff zwischen Strahlen mit
$Id: vektor.tex,v 1.22 2017/05/15 15:10:33 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.5 Abstände und Winkel In der letzten Sitzung haben wir einen orientierten Winkelbegriff zwischen Strahlen mit
MAT746 Seminar über Euklidische Geometrie Philipp Becker
 MAT746 Seminar über Euklidische Geometrie Philipp Becker R David Hilbert (1862-1943) Den Begriffen aus der Anschauungswelt fehlt die notwendige mathematische Exaktheit. Gebäude der Geometrie soll nicht
MAT746 Seminar über Euklidische Geometrie Philipp Becker R David Hilbert (1862-1943) Den Begriffen aus der Anschauungswelt fehlt die notwendige mathematische Exaktheit. Gebäude der Geometrie soll nicht
Lineare Algebra. Mathematik II für Chemiker. Daniel Gerth
 Lineare Algebra Mathematik II für Chemiker Daniel Gerth Überblick Lineare Algebra Dieses Kapitel erklärt: Was man unter Vektoren versteht Wie man einfache geometrische Sachverhalte beschreibt Was man unter
Lineare Algebra Mathematik II für Chemiker Daniel Gerth Überblick Lineare Algebra Dieses Kapitel erklärt: Was man unter Vektoren versteht Wie man einfache geometrische Sachverhalte beschreibt Was man unter
00. Einiges zum Vektorraum R n
 00. Einiges zum Vektorraum R n In diesem einleitenden Kapitel werden die in der LV Einführung in die mathematischen Methoden erwähnten Konzepte über Vektoren (im R 2 und R 3 ) im Rahmen des n-dimensionalen
00. Einiges zum Vektorraum R n In diesem einleitenden Kapitel werden die in der LV Einführung in die mathematischen Methoden erwähnten Konzepte über Vektoren (im R 2 und R 3 ) im Rahmen des n-dimensionalen
Vektoren, Vektorräume
 Vektoren, Vektorräume Roman Wienands Sommersemester 2010 Mathematisches Institut der Universität zu Köln Roman Wienands (Universität zu Köln) Mathematik II für Studierende der Chemie Sommersemester 2010
Vektoren, Vektorräume Roman Wienands Sommersemester 2010 Mathematisches Institut der Universität zu Köln Roman Wienands (Universität zu Köln) Mathematik II für Studierende der Chemie Sommersemester 2010
Mathematische Grundlagen für die Vorlesung. Differentialgeometrie
 Mathematische Grundlagen für die Vorlesung Differentialgeometrie Dr. Gabriele Link 13.10.2010 In diesem Text sammeln wir die nötigen mathematischen Grundlagen, die wir in der Vorlesung Differentialgeometrie
Mathematische Grundlagen für die Vorlesung Differentialgeometrie Dr. Gabriele Link 13.10.2010 In diesem Text sammeln wir die nötigen mathematischen Grundlagen, die wir in der Vorlesung Differentialgeometrie
Elemente der Geometrie II
 Elemente der Geometrie II (Lehramt GHR/HR, Gym) Dr. Theo Overhagen Fachbereich 6 Mathematik Universität Siegen 2008 1 1 Die Axiome der Elementargeometrie 1.1 Das axiomatische Vorgehen Die Geometrie ist
Elemente der Geometrie II (Lehramt GHR/HR, Gym) Dr. Theo Overhagen Fachbereich 6 Mathematik Universität Siegen 2008 1 1 Die Axiome der Elementargeometrie 1.1 Das axiomatische Vorgehen Die Geometrie ist
Orthonormalisierung. ein euklidischer bzw. unitärer Vektorraum. Wir setzen
 Orthonormalisierung Wie schon im Falle V = R n erwähnt, erhalten wir durch ein Skalarprodukt eine zugehörige Norm (Länge) eines Vektors und in weiterer Folge eine Metrik (Abstand zwischen zwei Vektoren).
Orthonormalisierung Wie schon im Falle V = R n erwähnt, erhalten wir durch ein Skalarprodukt eine zugehörige Norm (Länge) eines Vektors und in weiterer Folge eine Metrik (Abstand zwischen zwei Vektoren).
Lineare Algebra: Theorie und Anwendungen
 Lineare Algebra: Theorie und Anwendungen Sommersemester 2012 Bernhard Burgeth Universität des Saarlandes c 2010 2012, Bernhard Burgeth 1 VEKTOREN IN DER EBENE UND IM RAUM 2 1 Vektoren in der Ebene und
Lineare Algebra: Theorie und Anwendungen Sommersemester 2012 Bernhard Burgeth Universität des Saarlandes c 2010 2012, Bernhard Burgeth 1 VEKTOREN IN DER EBENE UND IM RAUM 2 1 Vektoren in der Ebene und
Übungen zu Geometrie (LGy) Universität Regensburg, Sommersemester 2014 Dr. Raphael Zentner, Dr. Olaf Müller
 Universität Regensburg, Sommersemester 2014 Dr. Raphael Zentner, Dr. Olaf Müller") Übungen zu Geometrie (LGy) Universität Regensburg, Sommersemester 2014 Dr. Raphael Zentner, Dr. Olaf Müller Übungsblatt 13 Dieses Übungsblatt wird nicht mehr zur Abgabe vorgesehen. Es dient der Wiederholung
Übungen zu Geometrie (LGy) Universität Regensburg, Sommersemester 2014 Dr. Raphael Zentner, Dr. Olaf Müller Übungsblatt 13 Dieses Übungsblatt wird nicht mehr zur Abgabe vorgesehen. Es dient der Wiederholung
1 Analytische Geometrie und Grundlagen
 $Id: vektor.tex,v 1.21 2017/05/13 16:28:55 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.5 Abstände und Winkel In der letzten Sitzung haben wir einen orientierten Winkelbegriff zwischen Strahlen mit
$Id: vektor.tex,v 1.21 2017/05/13 16:28:55 hk Exp $ 1 Analytische Geometrie und Grundlagen 1.5 Abstände und Winkel In der letzten Sitzung haben wir einen orientierten Winkelbegriff zwischen Strahlen mit
Klausur zur Akademischen Teilprüfung, Modul 2,
 PH Heidelberg, Fach Mathematik Klausur zur Akademischen Teilprüfung, Modul, GHPO I vom.7.003, RPO vom 4.08.003 Einführung in die Geometrie Wintersemester 1/13, 1. Februar 013 Klausur zur ATP, Modul, Einführung
PH Heidelberg, Fach Mathematik Klausur zur Akademischen Teilprüfung, Modul, GHPO I vom.7.003, RPO vom 4.08.003 Einführung in die Geometrie Wintersemester 1/13, 1. Februar 013 Klausur zur ATP, Modul, Einführung
Nichteuklidische Geometrien und gekrümmte Räume
 Nichteuklidische Geometrien und gekrümmte Räume Es begann mit dem Problem der Landvermessung... Carl Friedrich Gauß (1777-1855): Theorie gekrümmter Flächen Landesvermessung des Königreichs Hannover Entdeckung
Nichteuklidische Geometrien und gekrümmte Räume Es begann mit dem Problem der Landvermessung... Carl Friedrich Gauß (1777-1855): Theorie gekrümmter Flächen Landesvermessung des Königreichs Hannover Entdeckung
Körperaxiome und Anordnungsaxiome. Analysis I. Guofang Wang. Universität Freiburg
 Universität Freiburg 25.10.2011 Körperaxiome Wir setzen in dieser Vorlesung die reellen Zaheln als gegeben aus. Mit R bezeichnen wir die Menge aller reellen Zahlen, auf der folgende Strukturen gegeben
Universität Freiburg 25.10.2011 Körperaxiome Wir setzen in dieser Vorlesung die reellen Zaheln als gegeben aus. Mit R bezeichnen wir die Menge aller reellen Zahlen, auf der folgende Strukturen gegeben
Hyperbolische Geometrie
 Hyperbolische Geometrie von Sebastian Kalinka und Alexander Thomaso nach dem Buch Elementare Differentialgeometrie von Christian Bär Wiederholung Für κ R setzt man ˆM κ := {(x, y, z) R 3 x 2 + κ(y 2 +
Hyperbolische Geometrie von Sebastian Kalinka und Alexander Thomaso nach dem Buch Elementare Differentialgeometrie von Christian Bär Wiederholung Für κ R setzt man ˆM κ := {(x, y, z) R 3 x 2 + κ(y 2 +
Kapitel VI. Euklidische Geometrie
 Kapitel VI. Euklidische Geometrie 1 Abstände und Lote Wiederholung aus Kapitel IV. Wir versehen R n mit dem Standard Skalarprodukt x 1 y 1.,. := x 1 y 1 +... + x n y n x n y n Es gilt für u, v, w R n und
Kapitel VI. Euklidische Geometrie 1 Abstände und Lote Wiederholung aus Kapitel IV. Wir versehen R n mit dem Standard Skalarprodukt x 1 y 1.,. := x 1 y 1 +... + x n y n x n y n Es gilt für u, v, w R n und
Sphärische Zwei - und Dreiecke
 TECHNISCHE UNIVERSITÄT DORTMUND Sphärische Zwei - und Dreiecke Proseminar innerhalb des Lehramtsstudiums im Fach Mathematik Meryem Öcal Matrikelnummer 168833 Studiengang LABG 2009 Prüfer: Prof. Dr. Lorenz
TECHNISCHE UNIVERSITÄT DORTMUND Sphärische Zwei - und Dreiecke Proseminar innerhalb des Lehramtsstudiums im Fach Mathematik Meryem Öcal Matrikelnummer 168833 Studiengang LABG 2009 Prüfer: Prof. Dr. Lorenz
1 Euklidische und unitäre Vektorräume
 1 Euklidische und unitäre Vektorräume In diesem Abschnitt betrachten wir reelle und komplexe Vektorräume mit Skalarprodukt. Dieses erlaubt uns die Länge eines Vektors zu definieren und (im Fall eines reellen
1 Euklidische und unitäre Vektorräume In diesem Abschnitt betrachten wir reelle und komplexe Vektorräume mit Skalarprodukt. Dieses erlaubt uns die Länge eines Vektors zu definieren und (im Fall eines reellen
Brückenkurs Mathematik. Mittwoch Freitag
 Brückenkurs Mathematik Mittwoch 5.10. - Freitag 14.10.2016 Vorlesung 4 Dreiecke, Vektoren, Matrizen, lineare Gleichungssysteme Kai Rothe Technische Universität Hamburg-Harburg Montag 10.10.2016 0 Brückenkurs
Brückenkurs Mathematik Mittwoch 5.10. - Freitag 14.10.2016 Vorlesung 4 Dreiecke, Vektoren, Matrizen, lineare Gleichungssysteme Kai Rothe Technische Universität Hamburg-Harburg Montag 10.10.2016 0 Brückenkurs
Schulbezogene Geometrie vom höheren Standpunkt
 Schulbezogene Geometrie vom höheren Standpunkt Vorlesungen für die Lehramtsstudiengänge Prof. Dr. Knut Smoczyk Leibniz Universität Hannover Stand: 25. Juni 2014 Alle Rechte beim Autor Inhaltsverzeichnis
Schulbezogene Geometrie vom höheren Standpunkt Vorlesungen für die Lehramtsstudiengänge Prof. Dr. Knut Smoczyk Leibniz Universität Hannover Stand: 25. Juni 2014 Alle Rechte beim Autor Inhaltsverzeichnis
Vektorrechnung. 10. August Inhaltsverzeichnis. 1 Vektoren 2. 2 Grundlegende Rechenoperationen mit Vektoren 3. 3 Geometrie der Vektoren 5
 Vektorrechnung 0. August 07 Inhaltsverzeichnis Vektoren Grundlegende Rechenoperationen mit Vektoren 3 3 Geometrie der Vektoren 5 4 Das Kreuzprodukt 9 Vektoren Die reellen Zahlen R können wir uns als eine
Vektorrechnung 0. August 07 Inhaltsverzeichnis Vektoren Grundlegende Rechenoperationen mit Vektoren 3 3 Geometrie der Vektoren 5 4 Das Kreuzprodukt 9 Vektoren Die reellen Zahlen R können wir uns als eine
8. Kleinsche Geometrie I: Hyperbolische Geometrie. Das Erlanger Programm.
 8. Kleinsche Geometrie I: Hyperbolische Geometrie Nach den bisherigen Ergebnissen müssen wir uns nun um die Gruppe PSL 2 C kümmern. Das Studium dieser Gruppe wird uns in dieser Vorlesung zu einem neuen
8. Kleinsche Geometrie I: Hyperbolische Geometrie Nach den bisherigen Ergebnissen müssen wir uns nun um die Gruppe PSL 2 C kümmern. Das Studium dieser Gruppe wird uns in dieser Vorlesung zu einem neuen
Lösbarkeit linearer Gleichungssysteme
 Lösbarkeit linearer Gleichungssysteme Lineares Gleichungssystem: Ax b, A R m n, x R n, b R m L R m R n Lx Ax Bemerkung b 0 R m Das Gleichungssystem heißt homogen a A0 0 Das LGS ist stets lösbar b Wenn
Lösbarkeit linearer Gleichungssysteme Lineares Gleichungssystem: Ax b, A R m n, x R n, b R m L R m R n Lx Ax Bemerkung b 0 R m Das Gleichungssystem heißt homogen a A0 0 Das LGS ist stets lösbar b Wenn
Axiomatischer Aufbau der Geometrie
 Bei axiomatisch aufgebauten Theorien existieren heute: 2 Arten von Begriffen: Grundbegriffe (werden nicht definiert und das verwendete Axiomensystem legt fest, welche Begriffe Grundbegriffe sind) Abgeleitete
Bei axiomatisch aufgebauten Theorien existieren heute: 2 Arten von Begriffen: Grundbegriffe (werden nicht definiert und das verwendete Axiomensystem legt fest, welche Begriffe Grundbegriffe sind) Abgeleitete
Musterlösung zur Klausur Grundwissen Schulmathematik am
 Musterlösung zur Klausur Grundwissen Schulmathematik am 24.2.2012 Aufgabe 1 (10 Punkte) Zeigen Sie: Für alle n N ist n 3 3n 2 +2n durch 6 teilbar. svorschläge Beweis durch Induktion nach n n = 1. Es ist
Musterlösung zur Klausur Grundwissen Schulmathematik am 24.2.2012 Aufgabe 1 (10 Punkte) Zeigen Sie: Für alle n N ist n 3 3n 2 +2n durch 6 teilbar. svorschläge Beweis durch Induktion nach n n = 1. Es ist
Kapitel V. Affine Geometrie
 Kapitel V Affine Geometrie 1 Affine Räume Betrachte ein lineares Gleichungssystem Γ : a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + + a 2n x n = b 2 a m1 x 1 + a m2 x 2 + + a mn x n = b
Kapitel V Affine Geometrie 1 Affine Räume Betrachte ein lineares Gleichungssystem Γ : a 11 x 1 + a 12 x 2 + + a 1n x n = b 1 a 21 x 1 + a 22 x 2 + + a 2n x n = b 2 a m1 x 1 + a m2 x 2 + + a mn x n = b
Euklidischer Raum Kartesisches Koordinatensystem. 1 E Ma 1 Lubov Vassilevskaya
 Euklidischer Raum Kartesisches Koordinatensystem 1 E Ma 1 Lubov Vassilevskaya Algebra und Geometrie Man zerlegt die Mathematik in Teildisziplinen: Arithmetik, Algebra, Geometrie und so weiter, doch diese
Euklidischer Raum Kartesisches Koordinatensystem 1 E Ma 1 Lubov Vassilevskaya Algebra und Geometrie Man zerlegt die Mathematik in Teildisziplinen: Arithmetik, Algebra, Geometrie und so weiter, doch diese
Übungen zur Vorlesung. Grundlagen der Geometrie. PD Dr. S. Sagave. Wintersemester 2014/15
 Blatt 1, 13.10.2014 Aufgabe 1.1. Sei (E, G) eine Ebene, also eine Menge E zusammen mit einer Menge von Teilmengen G, so dass die Inzidenzaxiome (A1) bis (A4) erfüllt sind. Sei E E eine Teilmenge, die nicht
Blatt 1, 13.10.2014 Aufgabe 1.1. Sei (E, G) eine Ebene, also eine Menge E zusammen mit einer Menge von Teilmengen G, so dass die Inzidenzaxiome (A1) bis (A4) erfüllt sind. Sei E E eine Teilmenge, die nicht
Unterlagen zur Vorlesung Algebra und Geometrie in der Schule: Grundwissen über Affine Geometrie. Sommersemester Franz Pauer
 Unterlagen zur Vorlesung Algebra und Geometrie in der Schule: Grundwissen über Affine Geometrie Sommersemester 2009 Franz Pauer INSTITUT FÜR MATHEMATIK, UNIVERSITÄT INNSBRUCK, TECHNIKERSTRASSE 13, 6020
Unterlagen zur Vorlesung Algebra und Geometrie in der Schule: Grundwissen über Affine Geometrie Sommersemester 2009 Franz Pauer INSTITUT FÜR MATHEMATIK, UNIVERSITÄT INNSBRUCK, TECHNIKERSTRASSE 13, 6020
Seminar Einführung in die Kunst mathematischer Ungleichungen
 Seminar Einführung in die Kunst mathematischer Ungleichungen Geometrie und die Summe von Quadraten Clara Brünn 25. April 2016 Inhaltsverzeichnis 1 Einleitung 2 1.1 Geometrie allgemein.................................
Seminar Einführung in die Kunst mathematischer Ungleichungen Geometrie und die Summe von Quadraten Clara Brünn 25. April 2016 Inhaltsverzeichnis 1 Einleitung 2 1.1 Geometrie allgemein.................................
Vorlesung Mathematik 2 für Informatik
 Vorlesung Mathematik für Informatik Inhalt: Lineare Algebra Rechnen mit Vektoren und Matrizen Lineare Gleichungssysteme, GauÿAlgorithmus Vektorräume, Lineare Abbildungen Eigenwerte und Eigenvektoren Literatur
Vorlesung Mathematik für Informatik Inhalt: Lineare Algebra Rechnen mit Vektoren und Matrizen Lineare Gleichungssysteme, GauÿAlgorithmus Vektorräume, Lineare Abbildungen Eigenwerte und Eigenvektoren Literatur
Lineare Algebra und analytische Geometrie II
 Prof. Dr. H. Brenner Osnabrück SS 2016 Lineare Algebra und analytische Geometrie II Vorlesung 34 Die Diagonalisierbarkeit von Isometrien im Komplexen Satz 34.1. Es sei V ein endlichdimensionaler C-Vektorraum
Prof. Dr. H. Brenner Osnabrück SS 2016 Lineare Algebra und analytische Geometrie II Vorlesung 34 Die Diagonalisierbarkeit von Isometrien im Komplexen Satz 34.1. Es sei V ein endlichdimensionaler C-Vektorraum
Geometrie und Lineare Algebra für das Lehramt
 Geometrie und Lineare lgebra für das Lehramt Stefan Haller Dies ist ein Skriptum zu meiner Vorlesung im Sommersemester 2018. Es steht unter http://www.mat.univie.ac.at/~stefan/geometrie.s2018.html zur
Geometrie und Lineare lgebra für das Lehramt Stefan Haller Dies ist ein Skriptum zu meiner Vorlesung im Sommersemester 2018. Es steht unter http://www.mat.univie.ac.at/~stefan/geometrie.s2018.html zur
Brückenkurs Mathematik
 Brückenkurs Mathematik 6.10. - 17.10. Vorlesung 3 Geometrie Doris Bohnet Universität Hamburg - Department Mathematik Mi 8.10.2008 1 Geometrie des Dreiecks 2 Vektoren Länge eines Vektors Skalarprodukt Kreuzprodukt
Brückenkurs Mathematik 6.10. - 17.10. Vorlesung 3 Geometrie Doris Bohnet Universität Hamburg - Department Mathematik Mi 8.10.2008 1 Geometrie des Dreiecks 2 Vektoren Länge eines Vektors Skalarprodukt Kreuzprodukt
Modulprüfung zum Lehrerweiterbildungskurs Geometrie am
 Modulprüfung zum Lehrerweiterbildungskurs Geometrie am 28.6.17 Name, Vorname Matrikel-Nr. Aufg.1 Aufg.2 Aufg.3 Aufg.4 Σ Note bzw. Kennzeichen Punkte Bearbeiten Sie bitte drei der vier folgenden Aufgaben!
Modulprüfung zum Lehrerweiterbildungskurs Geometrie am 28.6.17 Name, Vorname Matrikel-Nr. Aufg.1 Aufg.2 Aufg.3 Aufg.4 Σ Note bzw. Kennzeichen Punkte Bearbeiten Sie bitte drei der vier folgenden Aufgaben!
3 Vektorräume abstrakt
 Mathematik I für inf/swt Wintersemester / Seite 7 Vektorräume abstrakt Lineare Unabhängigkeit Definition: Sei V Vektorraum W V Dann heißt W := LH(W := Menge aller Linearkombinationen aus W die lineare
Mathematik I für inf/swt Wintersemester / Seite 7 Vektorräume abstrakt Lineare Unabhängigkeit Definition: Sei V Vektorraum W V Dann heißt W := LH(W := Menge aller Linearkombinationen aus W die lineare
Das Vektorprodukt und Sphärische Geometrie
 Das Vektorprodukt und Sphärische Geometrie Proseminar zu Algebra von Methnani Lassaad Mathematisches Institut der Heinrich-Heine-Universität Düsseldorf 12. April 2010 Betreuung: Prof. Dr. Bogopolski Ÿ1)
Das Vektorprodukt und Sphärische Geometrie Proseminar zu Algebra von Methnani Lassaad Mathematisches Institut der Heinrich-Heine-Universität Düsseldorf 12. April 2010 Betreuung: Prof. Dr. Bogopolski Ÿ1)
Analytische Geometrie I
 Analytische Geometrie I Rainer Hauser Januar 202 Einleitung. Geometrie und Algebra Geometrie und Algebra sind historisch zwei unabhängige Teilgebiete der Mathematik und werden bis heute von Laien weitgehend
Analytische Geometrie I Rainer Hauser Januar 202 Einleitung. Geometrie und Algebra Geometrie und Algebra sind historisch zwei unabhängige Teilgebiete der Mathematik und werden bis heute von Laien weitgehend
Lösungsmenge L I = {x R 3x + 5 = 9} = L II = {x R 3x = 4} = L III = { }
 Zur Einleitung: Lineare Gleichungssysteme Wir untersuchen zunächst mit Methoden, die Sie vermutlich aus der Schule kennen, explizit einige kleine lineare Gleichungssysteme. Das Gleichungssystem I wird
Zur Einleitung: Lineare Gleichungssysteme Wir untersuchen zunächst mit Methoden, die Sie vermutlich aus der Schule kennen, explizit einige kleine lineare Gleichungssysteme. Das Gleichungssystem I wird
entspricht der Länge des Vektorpfeils. Im R 2 : x =
 Norm (oder Betrag) eines Vektors im R n entspricht der Länge des Vektorpfeils. ( ) Im R : x = x = x + x nach Pythagoras. Allgemein im R n : x x = x + x +... + x n. Beispiele ( ) =, ( 4 ) = 5, =, 4 = 0.
Norm (oder Betrag) eines Vektors im R n entspricht der Länge des Vektorpfeils. ( ) Im R : x = x = x + x nach Pythagoras. Allgemein im R n : x x = x + x +... + x n. Beispiele ( ) =, ( 4 ) = 5, =, 4 = 0.
1 Einleitung. 1.1 Motivation. 6 Differentialgeometrie: Grundlagen Vorlesung 1
 6 Differentialgeometrie: Grundlagen Vorlesung Einleitung. Motivation.. Name of the game Geometer bezeichnet klassisch einen Landvermesser (heute ist eher Geodät gebräuchlich. Die klassische Differentialgeometrie
6 Differentialgeometrie: Grundlagen Vorlesung Einleitung. Motivation.. Name of the game Geometer bezeichnet klassisch einen Landvermesser (heute ist eher Geodät gebräuchlich. Die klassische Differentialgeometrie
In diesem Abschnitt beschäftigen wir uns mit Strecken und Winkeln.
 2. Hilbertschen Geometrie II: Kongruenzsätze In diesem Abschnitt beschäftigen wir uns mit Strecken und Winkeln. Strecken Kongruenz. Definition. Eine Strecken Kongruenz (oder einfach: Kongruenz) einer Geometrie
2. Hilbertschen Geometrie II: Kongruenzsätze In diesem Abschnitt beschäftigen wir uns mit Strecken und Winkeln. Strecken Kongruenz. Definition. Eine Strecken Kongruenz (oder einfach: Kongruenz) einer Geometrie
Klausurenkurs zum Staatsexamen (WS 2013/14): Lineare Algebra und analytische Geometrie 7
: Lineare Algebra und analytische Geometrie 7") Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 3/4): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr, Thema 3, Aufgabe 4) Im R 3 seien die beiden Ebenen E : 6x+4y z = und E : +s +t 4 gegeben.
Dr. Erwin Schörner Klausurenkurs zum Staatsexamen (WS 3/4): Lineare Algebra und analytische Geometrie 7 7. (Frühjahr, Thema 3, Aufgabe 4) Im R 3 seien die beiden Ebenen E : 6x+4y z = und E : +s +t 4 gegeben.
Kapitel 2. Abbildungsgeometrie
 Kapitel 2 Abbildungsgeometrie 1 Maximilian Geier, Institut für Mathematik, Campus Landau, Universität Koblenz Landau Kapitel 2 Abbildungsgeometrie 2.1 2,3,4 Geradenspiegelungen 2.2 Sinn & Orientierung
Kapitel 2 Abbildungsgeometrie 1 Maximilian Geier, Institut für Mathematik, Campus Landau, Universität Koblenz Landau Kapitel 2 Abbildungsgeometrie 2.1 2,3,4 Geradenspiegelungen 2.2 Sinn & Orientierung
Musterlösungen Klausur Geometrie
 Musterlösungen Klausur Geometrie Aufgabe 1 (Total: 8 Punkte). Seien A, B, C die Eckpunkte eines nichtentarteten Dreiecks in der euklidischen Ebene. Seien D, E, F derart gewählt, dass folgende Teilverhältnisse
Musterlösungen Klausur Geometrie Aufgabe 1 (Total: 8 Punkte). Seien A, B, C die Eckpunkte eines nichtentarteten Dreiecks in der euklidischen Ebene. Seien D, E, F derart gewählt, dass folgende Teilverhältnisse
Schulmathematik versus Unimathematik : Sichtweisen eines Fachmathematikers
 Schulmathematik versus Unimathematik : Sichtweisen eines Fachmathematikers 25. April 2015 1. Antithesen Warum muss ich mich an der Uni mit Galoistheorie beschäftigen? Die ist so schwer und in der Schule
Schulmathematik versus Unimathematik : Sichtweisen eines Fachmathematikers 25. April 2015 1. Antithesen Warum muss ich mich an der Uni mit Galoistheorie beschäftigen? Die ist so schwer und in der Schule
9. Geometrische Konstruktionen und Geometrische Zahlen.
 9. Geometrische Konstruktionen und Geometrische Zahlen. Die Dreiteilungsgleichnung. Das Problem der Dreiteilung des Winkels wurde von Descartes vollständig gelöst. Dies ist in der Geometrie von Descartes
9. Geometrische Konstruktionen und Geometrische Zahlen. Die Dreiteilungsgleichnung. Das Problem der Dreiteilung des Winkels wurde von Descartes vollständig gelöst. Dies ist in der Geometrie von Descartes
Fit in Mathe. Juni Klassenstufe 10. Trigonometrie mit Sinus- und Kosinussatz
 Thema Musterlösungen 1 Trigonometrie mit Sinus- und Kosinussatz Vorbemerkungen Für Winkelangaben wird hier, wenn nicht anders angegeben, das Bogenmaß verwendet. Es gilt 1 rad = 360 π 57, bezeichnet das
Thema Musterlösungen 1 Trigonometrie mit Sinus- und Kosinussatz Vorbemerkungen Für Winkelangaben wird hier, wenn nicht anders angegeben, das Bogenmaß verwendet. Es gilt 1 rad = 360 π 57, bezeichnet das
Einführung in die Mathematik
 Helmut Koch Einführung in die Mathematik Hintergründe der Schulmathematik Zweite, korrigierte und erweiterte Auflage Springer Inhaltsverzeichnis Einleitung 1 1 Natürliche Zahlen 11 1.1 Zählen 11 1.2 Die
Helmut Koch Einführung in die Mathematik Hintergründe der Schulmathematik Zweite, korrigierte und erweiterte Auflage Springer Inhaltsverzeichnis Einleitung 1 1 Natürliche Zahlen 11 1.1 Zählen 11 1.2 Die
Elementargeometrie. Universität Freiburg, SS 2016 Nadine Große. Skript - Version vom
 Elementargeometrie Universität Freiburg, SS 2016 Nadine Große Skript - Version vom 26.07.2016 Inhaltsverzeichnis I. Axiomatik der euklidischen Geometrie 1 I.1. Inzidenzstruktur............................................
Elementargeometrie Universität Freiburg, SS 2016 Nadine Große Skript - Version vom 26.07.2016 Inhaltsverzeichnis I. Axiomatik der euklidischen Geometrie 1 I.1. Inzidenzstruktur............................................
Übungsblatt 1: Lösungswege und Lösungen
 Übungsblatt : Lösungswege und Lösungen 5..6 ) Hier geht es weniger um mathematisch-strenge Beweise als darum, mit abstrakten Vektoren ohne Komponenten) zu hantieren und damit die Behauptungen plausibel
Übungsblatt : Lösungswege und Lösungen 5..6 ) Hier geht es weniger um mathematisch-strenge Beweise als darum, mit abstrakten Vektoren ohne Komponenten) zu hantieren und damit die Behauptungen plausibel
Zur Deckung bringen präzisiert werden. Ich stelle zunächst Hilberts Version vor, wähle aber anschließend einen anderen, etwas anschaulicheren Weg.
 30 Jetzt soll der Begriff der Kongruenz bzw. Euklids vage Vorstellung vom Zur Deckung bringen präzisiert werden. Ich stelle zunächst Hilberts Version vor, wähle aber anschließend einen anderen, etwas anschaulicheren
30 Jetzt soll der Begriff der Kongruenz bzw. Euklids vage Vorstellung vom Zur Deckung bringen präzisiert werden. Ich stelle zunächst Hilberts Version vor, wähle aber anschließend einen anderen, etwas anschaulicheren
Elemente der Mathematik - Sommer 2016
 Elemente der Mathematik - Sommer 06 Prof. Dr. Matthias Lesch, Regula Krapf Übungsblatt 8 Aufgabe 7 (8 Punkte). Ein Parallelogramm ist ein Rechteck ABCD mit Seiten a, b, c, d wie unten dargestellt, mit
Elemente der Mathematik - Sommer 06 Prof. Dr. Matthias Lesch, Regula Krapf Übungsblatt 8 Aufgabe 7 (8 Punkte). Ein Parallelogramm ist ein Rechteck ABCD mit Seiten a, b, c, d wie unten dargestellt, mit
Mathematik III - Blatt 6
 Mathematik III - Blatt Christopher Bronner, Frank Essenberger 8. November Aufgabe Wir suchen erstmal im inneren des Vierecks nach Punkten, die für einen Extremwert in Frage kommen, danach auf den Rändern
Mathematik III - Blatt Christopher Bronner, Frank Essenberger 8. November Aufgabe Wir suchen erstmal im inneren des Vierecks nach Punkten, die für einen Extremwert in Frage kommen, danach auf den Rändern
Geometrie. Homepage zur Veranstaltung: Lehre Geometrie
 Geometrie 4.1 Geometrie Homepage zur Veranstaltung: http://www.juergen-roth.de Lehre Geometrie Geometrie 4.2 Inhaltsverzeichnis Geometrie 1 Axiome der Elementargeometrie 2 Kongruenzabbildungen 3 Längen-,
Geometrie 4.1 Geometrie Homepage zur Veranstaltung: http://www.juergen-roth.de Lehre Geometrie Geometrie 4.2 Inhaltsverzeichnis Geometrie 1 Axiome der Elementargeometrie 2 Kongruenzabbildungen 3 Längen-,
Surjektive, injektive und bijektive Funktionen.
 Kapitel 1: Aussagen, Mengen, Funktionen Surjektive, injektive und bijektive Funktionen. Definition. Sei f : M N eine Funktion. Dann heißt f surjektiv, falls die Gleichung f(x) = y für jedes y N mindestens
Kapitel 1: Aussagen, Mengen, Funktionen Surjektive, injektive und bijektive Funktionen. Definition. Sei f : M N eine Funktion. Dann heißt f surjektiv, falls die Gleichung f(x) = y für jedes y N mindestens
Das Parallelenproblem
 Proseminar zur Linearen Algebra und Elementargeometrie Das Parallelenproblem Wintersemester 2016/17 von: Yann-Martin Jeannès yanniymj@gmx.net Prof. Dr. L. Schwachhöfer Technische Universität Dortmund V.
Proseminar zur Linearen Algebra und Elementargeometrie Das Parallelenproblem Wintersemester 2016/17 von: Yann-Martin Jeannès yanniymj@gmx.net Prof. Dr. L. Schwachhöfer Technische Universität Dortmund V.
C orthogonal und haben die Länge 1). Dann ist die Länge von w = x u + y v gegeben durch w 2 Def. = w,w =
. Dann ist die Länge von w = x u + y v gegeben durch w 2 Def. = w,w =") 1 v Die Länge Def. Sei (V,, ) ein Euklidscher Vektorraum. Für jeden Vektor v V heißt die Zahl v,v die Länge von v und wird v bezeichnet. Bemerkung. Die Länge des Vektors ist wohldefiniert, da nach Definition
1 v Die Länge Def. Sei (V,, ) ein Euklidscher Vektorraum. Für jeden Vektor v V heißt die Zahl v,v die Länge von v und wird v bezeichnet. Bemerkung. Die Länge des Vektors ist wohldefiniert, da nach Definition
Lineare Algebra in der Oberstufe
 Lineare Algebra in der Oberstufe Stefan Ruzika Mathematisches Institut Universität Koblenz-Landau Campus Koblenz 16. April 2016 Stefan Ruzika 1: Schulstoff 16. April 2016 1 / 32 Übersicht Ziel dieses Kapitels
Lineare Algebra in der Oberstufe Stefan Ruzika Mathematisches Institut Universität Koblenz-Landau Campus Koblenz 16. April 2016 Stefan Ruzika 1: Schulstoff 16. April 2016 1 / 32 Übersicht Ziel dieses Kapitels
: das Bild von ) unter der Funktion ist gegeben durch
 unter der Funktion ist gegeben durch") % 1.3 Funktionen Seien und Mengen nennt man Funktion oder Abbildung. Beachte: Zuordnung ist eindeutig. Bezeichnungen: : Definitionsbereich : Bildbereich (Zielmenge) von Der Graph einer Funktion: graph!
% 1.3 Funktionen Seien und Mengen nennt man Funktion oder Abbildung. Beachte: Zuordnung ist eindeutig. Bezeichnungen: : Definitionsbereich : Bildbereich (Zielmenge) von Der Graph einer Funktion: graph!
Einleitung 2. 1 Koordinatensysteme 2. 2 Lineare Abbildungen 4. 3 Literaturverzeichnis 7
 Sonja Hunscha - Koordinatensysteme 1 Inhalt Einleitung 2 1 Koordinatensysteme 2 1.1 Kartesisches Koordinatensystem 2 1.2 Polarkoordinaten 3 1.3 Zusammenhang zwischen kartesischen und Polarkoordinaten 3
Sonja Hunscha - Koordinatensysteme 1 Inhalt Einleitung 2 1 Koordinatensysteme 2 1.1 Kartesisches Koordinatensystem 2 1.2 Polarkoordinaten 3 1.3 Zusammenhang zwischen kartesischen und Polarkoordinaten 3
Einführung in die Algebra
 Prof. Dr. H. Brenner Osnabrück SS 2009 Einführung in die Algebra Vorlesung 24 Unter den drei klassischen Problemen der antiken Mathematik versteht man (1) die Quadratur des Kreises, (2) die Dreiteilung
Prof. Dr. H. Brenner Osnabrück SS 2009 Einführung in die Algebra Vorlesung 24 Unter den drei klassischen Problemen der antiken Mathematik versteht man (1) die Quadratur des Kreises, (2) die Dreiteilung
Mathematik für Naturwissenschaftler II
 Mathematik für Naturwissenschaftler II Dr Peter J Bauer Institut für Mathematik Universität Frankfurt am Main Sommersemester 27 Lineare Algebra Der mehrdimensionale Raum Vektoren Im Teil I dieser Vorlesung
Mathematik für Naturwissenschaftler II Dr Peter J Bauer Institut für Mathematik Universität Frankfurt am Main Sommersemester 27 Lineare Algebra Der mehrdimensionale Raum Vektoren Im Teil I dieser Vorlesung
Lineare Algebra I (WS 13/14)
") Lineare Algebra I (WS 13/14) Alexander Lytchak Nach einer Vorlage von Bernhard Hanke 06.12.2013 Alexander Lytchak 1 / 16 Wiederholung Ist V ein Vektorraum, so heißen Abbildungen T v : V V der Form w w
Lineare Algebra I (WS 13/14) Alexander Lytchak Nach einer Vorlage von Bernhard Hanke 06.12.2013 Alexander Lytchak 1 / 16 Wiederholung Ist V ein Vektorraum, so heißen Abbildungen T v : V V der Form w w
4. Kongruenz ohne Parallelen.
 4. Kongruenz ohne Parallelen. Den Griechen war bald klar, dass es bei einer solchen fundamentalen Frage, wie der nach der Existenz eines Pentagons, nicht mehr um noch so clevere geometrische Tricks gehen
4. Kongruenz ohne Parallelen. Den Griechen war bald klar, dass es bei einer solchen fundamentalen Frage, wie der nach der Existenz eines Pentagons, nicht mehr um noch so clevere geometrische Tricks gehen
Trigonometrie. bekannte Zusammenhänge. 4-Streckensatz: groß/klein = groß/klein. Zusammenhänge im allgemeinen Dreieck:
 Trigonometrie bekannte Zusammenhänge 4-Streckensatz: groß/klein = groß/klein Zusammenhänge im allgemeinen Dreieck: Summe zweier Seiten größer als dritte Seitenlänge: a + b > c Innenwinkelsumme: Summe der
Trigonometrie bekannte Zusammenhänge 4-Streckensatz: groß/klein = groß/klein Zusammenhänge im allgemeinen Dreieck: Summe zweier Seiten größer als dritte Seitenlänge: a + b > c Innenwinkelsumme: Summe der
Mathematik für Naturwissenschaftler II SS 2010
 Mathematik für Naturwissenschaftler II SS 2010 Lektion 6 4. Mai 2010 Definition 69. Der Vektor f 3 x 2 (x 1, x 2, x 3 ) f 2 x 3 (x 1, x 2, x 3 ) f 1 x 3 (x 1, x 2, x 3 ) f 3 x 1 (x 1, x 2, x 3 ) f 2 x
Mathematik für Naturwissenschaftler II SS 2010 Lektion 6 4. Mai 2010 Definition 69. Der Vektor f 3 x 2 (x 1, x 2, x 3 ) f 2 x 3 (x 1, x 2, x 3 ) f 1 x 3 (x 1, x 2, x 3 ) f 3 x 1 (x 1, x 2, x 3 ) f 2 x
Geometrie. Homepage zur Veranstaltung: Lehre Geometrie
 Geometrie 5.1 Geometrie Homepage zur Veranstaltung: http://www.juergen-roth.de Lehre Geometrie Geometrie 5.2 Inhaltsverzeichnis Geometrie 0 Geometrie!? 1 Axiome der Elementargeometrie 2 Kongruenzabbildungen
Geometrie 5.1 Geometrie Homepage zur Veranstaltung: http://www.juergen-roth.de Lehre Geometrie Geometrie 5.2 Inhaltsverzeichnis Geometrie 0 Geometrie!? 1 Axiome der Elementargeometrie 2 Kongruenzabbildungen
Elementargeometrie Sommersemester Mario Listing
 Elementargeometrie Sommersemester 2011 Mario Listing 8. August 2011 Inhaltsverzeichnis 1 Geometrien der Ebene 2 1.1 Inzidenzen und affine Ebenen.................. 2 1.2 Hilbert s Axiome der Euklidischen
Elementargeometrie Sommersemester 2011 Mario Listing 8. August 2011 Inhaltsverzeichnis 1 Geometrien der Ebene 2 1.1 Inzidenzen und affine Ebenen.................. 2 1.2 Hilbert s Axiome der Euklidischen
Prof. Dr. Felix Otto - Analysis I (WiSe 2001/2002)
") Prof. Dr. Felix Otto - Analysis I (WiSe 001/00) John Bieling Babak Haghighat Martin Killmann Oleg Lewagin Julia Nickenig Andreas Orth Martin Sander Maik Schäfer Florian Schuster Michael Strucken Andreas
Prof. Dr. Felix Otto - Analysis I (WiSe 001/00) John Bieling Babak Haghighat Martin Killmann Oleg Lewagin Julia Nickenig Andreas Orth Martin Sander Maik Schäfer Florian Schuster Michael Strucken Andreas
Homogene und inhomogene Koordinaten und das Hyperboloid
 Seminararbeit zum Seminar aus Reiner Mathematik Homogene und inhomogene Koordinaten und das Hyperboloid Gernot Holler 1010674 WS 2012/13 28.November 2012 1 Inhaltsverzeichnis 1 Einleitung 3 2 Homogene
Seminararbeit zum Seminar aus Reiner Mathematik Homogene und inhomogene Koordinaten und das Hyperboloid Gernot Holler 1010674 WS 2012/13 28.November 2012 1 Inhaltsverzeichnis 1 Einleitung 3 2 Homogene
Lineare Algebra und Numerische Mathematik für D-BAUG
 P. Grohs T. Welti F. Weber Herbstsemester 5 Lineare Algebra und Numerische Mathematik für D-BAUG ETH Zürich D-MATH Beispiellösung für Serie Aufgabe. Skalarprodukt und Orthogonalität.a) Bezüglich des euklidischen
P. Grohs T. Welti F. Weber Herbstsemester 5 Lineare Algebra und Numerische Mathematik für D-BAUG ETH Zürich D-MATH Beispiellösung für Serie Aufgabe. Skalarprodukt und Orthogonalität.a) Bezüglich des euklidischen
12 Der Abstand eines Punktes von einer Geraden Seite 1 von Der Abstand eines Punktes von einer Geraden
 12 Der Abstand eines Punktes von einer Geraden Seite 1 von 5 12 Der Abstand eines Punktes von einer Geraden Die Bestimmung des Abstands eines Punktes von einer Geraden gehört zu den zentralen Problemen
12 Der Abstand eines Punktes von einer Geraden Seite 1 von 5 12 Der Abstand eines Punktes von einer Geraden Die Bestimmung des Abstands eines Punktes von einer Geraden gehört zu den zentralen Problemen
Lineare Algebra in der Oberstufe
 Lineare Algebra in der Oberstufe Stefan Ruzika Mathematisches Institut Universität Koblenz-Landau Campus Koblenz 11. April 2016 Stefan Ruzika 1: Schulstoff 11. April 2016 1 / 21 Übersicht Ziel dieses Kapitels
Lineare Algebra in der Oberstufe Stefan Ruzika Mathematisches Institut Universität Koblenz-Landau Campus Koblenz 11. April 2016 Stefan Ruzika 1: Schulstoff 11. April 2016 1 / 21 Übersicht Ziel dieses Kapitels
Elemente der Mathematik - Sommer 2016
 Elemente der Mathematik - Sommer 2016 Prof Dr Matthias Lesch, Regula Krapf Übungsblatt 7 Aufgabe 23 9 Punkte In der folgenden Aufgabe sei mit baryzentrischen Koordinaten immer die baryzentrischen Koordinaten
Elemente der Mathematik - Sommer 2016 Prof Dr Matthias Lesch, Regula Krapf Übungsblatt 7 Aufgabe 23 9 Punkte In der folgenden Aufgabe sei mit baryzentrischen Koordinaten immer die baryzentrischen Koordinaten
Elementar Geometrie: Axiome, Sätze, Denitionen und Propositionen. 23. Juni 2014
 Elementar Geometrie: Axiome, Sätze, Denitionen und Propositionen 23. Juni 2014 1 1. Euklidische Geometrie (a) Ane Räume i. Denition: Ein aner Raum besteht aus einer Menge A, einem R-Vektorraum V und einer
Elementar Geometrie: Axiome, Sätze, Denitionen und Propositionen 23. Juni 2014 1 1. Euklidische Geometrie (a) Ane Räume i. Denition: Ein aner Raum besteht aus einer Menge A, einem R-Vektorraum V und einer
Geometrie Modul 4b WS 2015/16 Mi HS 1
 Geometrie Modul 4b WS 2015/16 Mi 10-12 HS 1 Benötigte Materialien: Geometrieheft DIN-A-4 blanco weiß, quadratisches Faltpapier/Zettelblock, rundes Faltpapier; Zirkel, Geometriedreieck, Klebstoff, Schere
Geometrie Modul 4b WS 2015/16 Mi 10-12 HS 1 Benötigte Materialien: Geometrieheft DIN-A-4 blanco weiß, quadratisches Faltpapier/Zettelblock, rundes Faltpapier; Zirkel, Geometriedreieck, Klebstoff, Schere
Der n-dimensionale Raum
 Der n-dimensionale Raum Mittels R kann nur eine Größe beschrieben werden. Um den Ort eines Teilchens im Raum festzulegen, werden schon drei Größen benötigt. Interessiert man sich für den Bewegungszustand
Der n-dimensionale Raum Mittels R kann nur eine Größe beschrieben werden. Um den Ort eines Teilchens im Raum festzulegen, werden schon drei Größen benötigt. Interessiert man sich für den Bewegungszustand
EXKURS: MATRIZEN UND LINEARE GLEICHUNGSSYSTEME
 EXKURS: MATRIZEN UND LINEARE GLEICHUNGSSYSTEME In diesem Abschnitt wiederholen wir zunächst grundlegende Definitionen und Eigenschaften im Bereich der Matrizenrechnung, die wahrscheinlich bereits in Ansätzen
EXKURS: MATRIZEN UND LINEARE GLEICHUNGSSYSTEME In diesem Abschnitt wiederholen wir zunächst grundlegende Definitionen und Eigenschaften im Bereich der Matrizenrechnung, die wahrscheinlich bereits in Ansätzen
5 Sphärische Trigonometrie
 $Id: sphaere.tex,v 1.15 2016/07/08 13:57:53 hk Exp $ 5 Sphärische Trigonometrie 5.3 Kleinkreise als sphärische Kreise In der letzten Sitzung hatten wir eingesehen das die sphärischen Kreise auf einer Sphäre
$Id: sphaere.tex,v 1.15 2016/07/08 13:57:53 hk Exp $ 5 Sphärische Trigonometrie 5.3 Kleinkreise als sphärische Kreise In der letzten Sitzung hatten wir eingesehen das die sphärischen Kreise auf einer Sphäre
Drehung um einen Punkt um Winkel α.
 Drehung um einen Punkt um Winkel α. Sei A R 2 und α R. Drehung um A um Winkel α ist eine Abbildung D A (α) : R 2 R 2 welche wie folgt definiert ist: D A (α) = T A D 0 (α) T ( A), wobei die Abbildung D
Drehung um einen Punkt um Winkel α. Sei A R 2 und α R. Drehung um A um Winkel α ist eine Abbildung D A (α) : R 2 R 2 welche wie folgt definiert ist: D A (α) = T A D 0 (α) T ( A), wobei die Abbildung D
Humboldt-Universität zu Berlin Mitglied im DFG-Forschungszentrum Matheon Mathematik für Schlüsseltechnologien. Mathematik für Schlüsseltechnologien
 Gekrümmte Welten Teilnehmer: Franziska Bielert Tilman Braemick Max Grellmann Matthias Görg Louis Trinh Alina Klinz Gruppenleiter: Jürg Kramer Anna v. Pippich Andreas-Oberschule, Berlin Herder-Oberschule,
Gekrümmte Welten Teilnehmer: Franziska Bielert Tilman Braemick Max Grellmann Matthias Görg Louis Trinh Alina Klinz Gruppenleiter: Jürg Kramer Anna v. Pippich Andreas-Oberschule, Berlin Herder-Oberschule,
Da diese Zahlenmenge nicht unter Subtraktion abgeschlossen ist, erweitert man sie zur Menge der ganzen Zahlen
 Kapitel 2 Die reellen Zahlen Die reellen Zahlen werden zunächst und vorübergehend als Dezimalzahlen eingeführt. Die wichtigsten Eigenschaften werden aus dieser Darstellung hergeleitet, mit denen dann die
Kapitel 2 Die reellen Zahlen Die reellen Zahlen werden zunächst und vorübergehend als Dezimalzahlen eingeführt. Die wichtigsten Eigenschaften werden aus dieser Darstellung hergeleitet, mit denen dann die
Kapitel 2: Mathematische Grundlagen
 [ Computeranimation ] Kapitel 2: Mathematische Grundlagen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 2. Mathematische Grundlagen
[ Computeranimation ] Kapitel 2: Mathematische Grundlagen Prof. Dr. Stefan M. Grünvogel stefan.gruenvogel@fh-koeln.de Institut für Medien- und Phototechnik Fachhochschule Köln 2. Mathematische Grundlagen
Ebene Elementargeometrie
 Ebene Elementargeometrie Im Folgenden unterscheiden wir neben Definitionen (Namensgebung) und Sätzen (nachweisbaren Aussagen) so genannte Axiome. Axiome stellen der Anschauung entnommene Aussagen dar,
Ebene Elementargeometrie Im Folgenden unterscheiden wir neben Definitionen (Namensgebung) und Sätzen (nachweisbaren Aussagen) so genannte Axiome. Axiome stellen der Anschauung entnommene Aussagen dar,
Der Punkt von Fermat 1
 Der Punkt von Fermat 1 Geometrie Der Punkt von Fermat Autor: Peter Andree Inhaltsverzeichnis 9 Der Punkt von Fermat 1 9.1 Die Aufgabe von Fermat an Torricelli................... 1 9.2 Der klassische, analytische
Der Punkt von Fermat 1 Geometrie Der Punkt von Fermat Autor: Peter Andree Inhaltsverzeichnis 9 Der Punkt von Fermat 1 9.1 Die Aufgabe von Fermat an Torricelli................... 1 9.2 Der klassische, analytische