Workshop Kompakte Antriebstechnik
|
|
|
- Maria Mann
- vor 6 Jahren
- Abrufe
Transkript

1 Workshop Kompakte Antriebstechnik



2 Workshop Kompakte Antriebstechnik Schrittmotoren Synchron-Servomotoren DC-Motoren
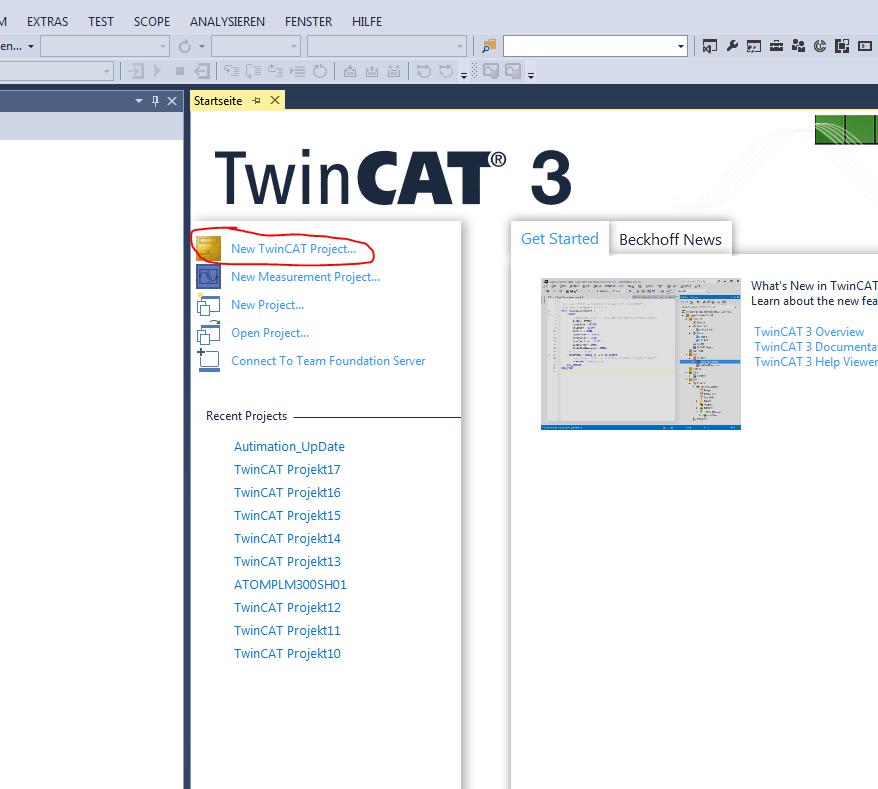
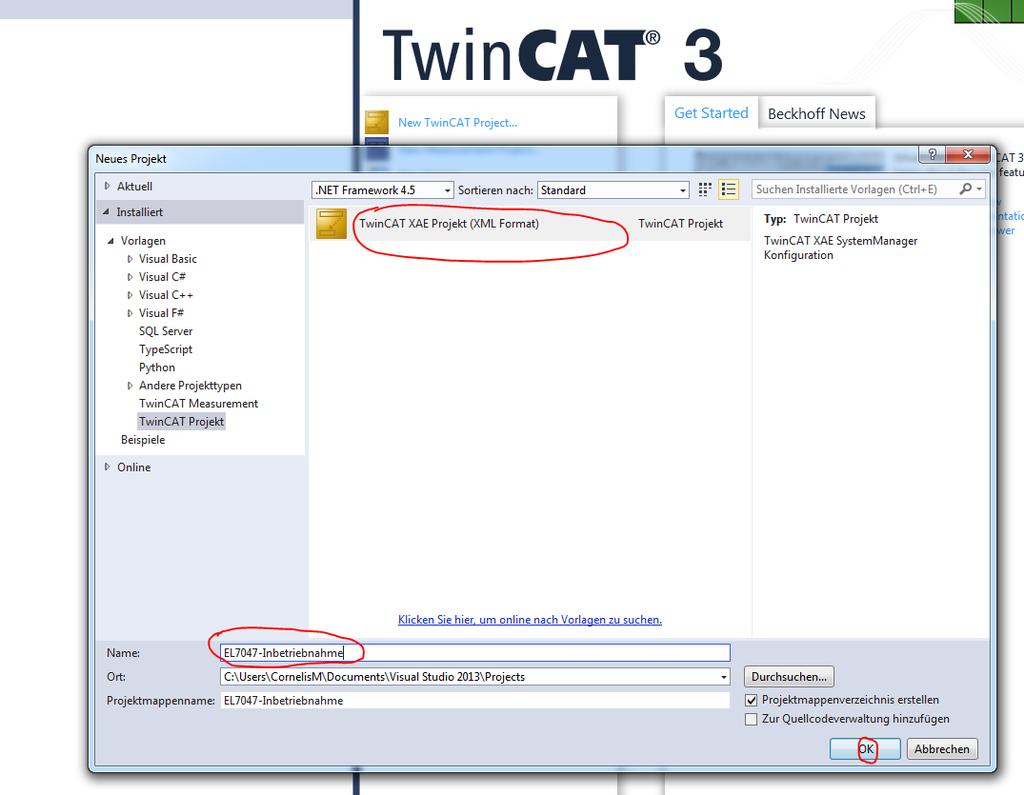
3 EL Inbetriebnahme


4 EL Inbetriebnahme

5 EL Inbetriebnahme
6 EL Inbetriebnahme

7 EL Inbetriebnahme



8 EL Inbetriebnahme Für Beckhoff Schrittmotoren stehen XML StartUp-Listen zur Verfügung Betriebsart der Klemme Encoder / Interner Zähler Inkremente / Umdrehung Vollschritte / s Bestromung im Stillstand Elektromotorische Kraft Reglerparameter

9 EL Inbetriebnahme
10 EL Betriebsarten - Automatik - Velocity direct - Position controller - Extended Velocity mode - Extended Position mode - Velocity sensorless - Positioning interface
11 EL Betriebsarten Automatik Bei der Betriebsart Automatik wird die Betriebsart von der Klemme entsprechend des gewählten Prozessabbildes eingestellt. Beachten: Die extended Betriebsarten werden hier nicht aktiviert
12 EL Betriebsarten Velocity direct In der Betriebsart Velocity direct arbeitet die EL70x7 im zyklischen Geschwindigkeitsinterface. Über die Variable STM Velocity kann eine definierte Geschwindigkeit eingestellt werden. Velocity ist auf die konfigurierte "Speed range" (Index 8012:05) normiert. Bei einer Speed range von beispielsweise 4000 Vollschritten/s entspricht einer Geschwindigkeitsausgabe von 100% (4000 Vollschritte/s). Wird ein Lagegeber verwendet, ist der Regelkreis über die NC geschlossen. Bei Schrittverlusten, gibt die NC einen neuen Fahrauftrag aus
13 EL Betriebsarten Position controller In der Betriebsart Position controller arbeitet die EL70x7 im zyklischen Positionsinterface. Über die Variable STM Position kann eine definierte Position eingestellt werden. Das Prozessabbild muss für Position Control" konfiguriert sein Position hat die Einheit Geberinkremente. Die Auflösung des Gebers bestimmt die Skalierung. Die Variable hat je nach Parametrierung 16 / 32 Bit
14 EL Betriebsarten Extended Velocity mode In der Betriebsart Extended Velocity mode arbeitet die EL70x7 im zyklischen Geschwindigkeitsinterface mit einer Feldorientierten Regelung. Über die Variable STM Velocity kann eine definierte Geschwindigkeit eingestellt werden. Velocity ist auf die konfigurierte "Speed range" (Index 8012:05) normiert. Bei einer Speed range von beispielsweise 4000 Vollschritten/s entspricht einer Geschwindigkeitsausgabe von 100% (4000 Vollschritte/s)
15 EL Betriebsarten Extended Position mode In der Betriebsart Extended Position mode arbeitet die EL70x7 im zyklischen Positionsinterface mit einer feldorienterten Regelung. Über die Variable STM Position kann eine definierte Position eingestellt werden. Position hat die Einheit Geberinkremente. Die Auflösung des Gebers bestimmt die Skalierung. Die Variable hat je nach Parametrierung 16 / 32 Bit

16 EL Betriebsarten Velocity sensorless In der Betriebsart Velocity sensorless arbeitet die EL70x7 im zyklischen Geschwindigkeitsinterface mit einer Feldorienterten Regelung. Über die Variable STM Velocity kann eine definierte Geschwindigkeit eingestellt werden. Durch die Auswertung der drehzahlproportionalen, induzierten Gegenspannung ist es möglich den Statorstrom mit Hilfe eines Maschinenmodells lastabhängig (ohne Sensor / Encoder) zu regeln und damit den Wirkungsgrad signifikant zu erhöhen
17 EL Betriebsarten Positioning interface Das "Positioning interface" bietet dem Anwender eine Möglichkeit direkt auf der Klemme Fahraufträge auszuführen. Velocity min./max. sind auf die konfigurierte "Speed range" (Index 8012:05) normiert. Bei einer Speed range von beispielsweise 4000 Vollschritten/s muss für eine Geschwindigkeitsausgabe von 100% in Velocity max. eine eingetragen werden. Die Parameter der Beschleunigung beziehen sich ebenfalls auf die eingestellte "Speed range" und werden in ms angegeben. Mit der Einstellung von 1000 beschleunigt die Klemme den Motor in 1000 ms von 0 auf 100 %. Target position hat die Einheit Geberinkremente. Die Auflösung des Gebers bestimmt die Skalierung. Die Variable hat je nach Parametrierung 16 / 32 Bit. Der "Start type" bestimmt die Art der Berechnung für die Ermittlung der Zielposition. Z.B.: ABSOLUTE, RELATIVE, ENDLESS_PLUS, ENDLESS_MINUS, etc




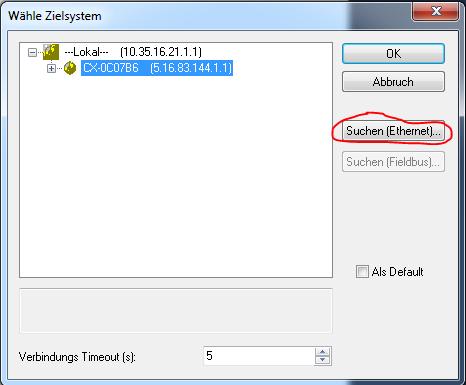
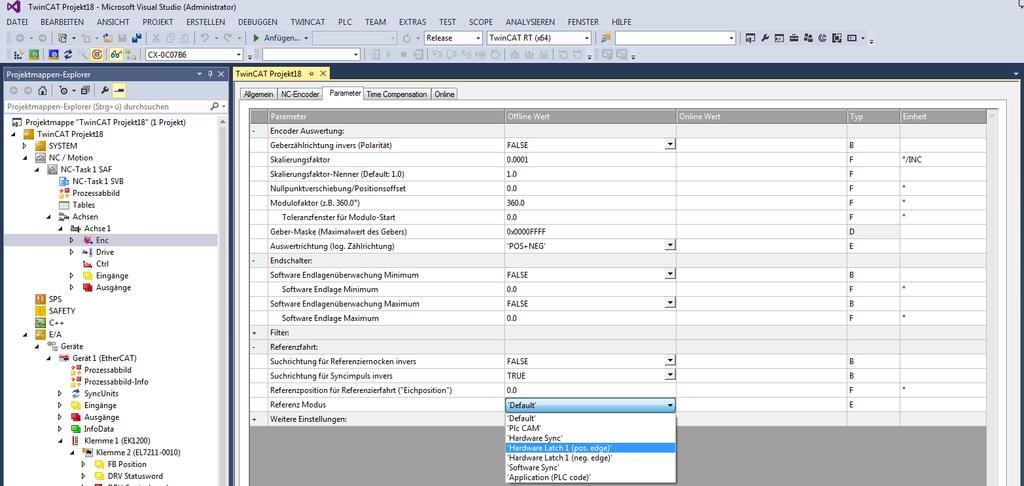
18 EL7047 Einbinden einer TwinCAT NC

19 EL7047 Einbinden einer TwinCAT NC
![EL7047 - Einbinden einer TwinCAT NC Bezugsgeschwindigkeit = 1 Motorumdrehung * (speed range / fullsteps) Beispiel: 1: 360 [ ]](/docs-images/67/57544107/images/20-0.jpg "* (2000 [fullsteps/s] / 200 [fullsteps]) = 3600 /s 2: 2 [mm] * (8000 [fullsteps/s] / 200 [fullsteps]) = 80 mm/s 01.10.2014 20")
20 EL Einbinden einer TwinCAT NC Bezugsgeschwindigkeit = 1 Motorumdrehung * (speed range / fullsteps) Beispiel: 1: 360 [ ] * (2000 [fullsteps/s] / 200 [fullsteps]) = 3600 /s 2: 2 [mm] * (8000 [fullsteps/s] / 200 [fullsteps]) = 80 mm/s
 [Inc] = 0,028125 /Inc 2: 2 [mm] / (1024 [Inc] * 4 ) = 0,00048828125 mm/inc 01.")
21 EL Einbinden einer TwinCAT NC Geber-Skalierungsfaktor = 1 Motorumdrehung * (Geberpulse / Umdrehung) Beispiel: 1: 360 [ ] / (200 * 64) [Inc] = 0, /Inc 2: 2 [mm] / (1024 [Inc] * 4 ) = 0, mm/inc

22 EL Einbinden einer TwinCAT NC Totzeitkompensation Da die NC zyklisch regelt, muss auch die vorhandene Totzeit bekannt gegeben werden. Regel: NC-Zykluszeit * 4 Beispiel: NC-Zykluszeit: 2ms 0,002s * 4 = 0,008s

23 EL Diagnose Diagnoseobjekt 10F3 Diag History


24 EL Diagnose 8012:11, 8012:19 Select Info Data Mappable Objekts


25 EL Diagnose A010, A020, 9010, 9020, Diagnosedaten per CoE Read auslesen

26 Servomotorklemme

27 EL Inbetriebnahme

28 EL Inbetriebnahme

29 EL Inbetriebnahme

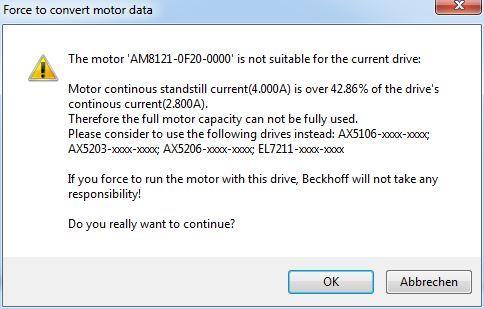
30 Drive Manager


31 Drive Manager



32 Drive Manager Bei EL7201/7211 erst ab Revision 0019 verfügbar! XML der Klemme updaten

33 Drive Manager

34 Drive Manager

35 EL Inbetriebnahme

36 EL Inbetriebnahme

37 EL Inbetriebnahme Weg oder Winkel der Applikation pro Umdrehung der Motorwelle
38 EL72x Betriebsarten CSP - cyclic synchronous position (Positionsregelung) CSV - cyclic synchronous velocity (Geschwindigkeitsregelung) CST - cyclic synchronous torque (Drehmomentregelung) CSTCA - cyclic synchronous torque with commutation angle (Drehmomentregelung mit Kommutierungswinkel) CoE Parameter 0x7010:03 (OperationMode) CoE Parameter 0x6010:03 (Aktive Betriebsart) Prozessabbild muss passend zur Betriebsart gewählt werden!
39 EL72x Betriebsart CSP - cyclic synchronous position In der Betriebsart CSP arbeitet die EL72x im zyklischen Positionsinterface. Über die Variable Target position kann eine definierte Position eingestellt werden. Vorteile: - Schneller als ein externer Lageregler 250us - Robuster als nur bei Drehzahlregelung - Einsparung der Geberauswertung / Regelung in der Steuerung - Hohe Regelgüte aufgrund geringer Totzeiten
40 EL72x Betriebsart CSP - cyclic synchronous position Der aktuelle Schleppfehler kann im Following error actual value (Index 6010:09 MDP742) ausgelesen werden. Mit dem Following error window (Index 8010:50 MDP742) lässt sich das Fenster der Schleppfehlerüberwachung einstellen. Der Wert 0xFFFFFF (-1) im Following error window bedeutet, dass die Schleppfehlerüberwachung ausgeschaltet ist und entspricht dem Auslieferungszustand. Mit dem Following error time out (Index 8010:51 MDP742) lässt sich die Zeit (in ms) einstellen, die für eine Schleppfehlerüberschreitung erlaubt ist. Der Following error time out ist im Auslieferungszustand 0x0000 (0)
41 EL72x Betriebsart CSV - cyclic synchronous velocity In der Betriebsart CSV arbeitet die EL72x im zyklischen Geschwindigkeitsinterface. Über die zyklische Variable Target velocity können Sie eine definierte Geschwindigkeit vorgeben. Der Wert im Index 9010:14 Velocity encoder resolution entspricht 1 U/s
42 EL72x Betriebsart CST - cyclic synchronous torque Über die zyklische Variable Target torque können Sie ein definiertes Moment vorgeben. Der Wert wird in 1000stel vom Nennstrom angegeben und das Moment wird nach folgender Formel berechnet, wobei der Nennstrom sich auf den Wert im Index 8011:12 (rated current) bezieht
43 EL72x Betriebsart CSTCA - cyclic synchronous torque with commutation angle Über die zyklische Variable Target torque können Sie ein definiertes Moment vorgeben. Der Wert wird in 1000stel vom Nennstrom angegeben und das Moment wird nach folgender Formel berechnet, wobei der Nennstrom sich auf den Wert im Index 8011:12 (rated current) bezieht. Über die zyklische Variable Commutation angle können Sie einen definierten Winkel vorgeben. Der Wert wird in 360 /2 16 angegeben


44 EL72x Betriebsart Spezielle Applikationen mit Kraftregelung
 - Tn senken, bis der Antrieb schwingt, dann um 10% erhöhen - Kp erhöhen, bis der Antrieb schwingt, dann um 20% senken. 01.10.2014 45")
45 EL Reglereinstellungen Kp: Verstärkungsfaktor (Proportionalanteil) Tn: Nachstellzeit (Integralanteil) - Überlagerten Regler ausschalten (Kp=0, Tn=9999) - Tn senken, bis der Antrieb schwingt, dann um 10% erhöhen - Kp erhöhen, bis der Antrieb schwingt, dann um 20% senken


46 EL Latchen
47 EL Latchen Step-by-step - Um die Touch Probe Funktion generell zu aktivieren, muss TP1 Enable auf true gesetzt werden. - Anschließend muss entschieden werden, ob bei einer positiven Flanke auf dem Eingang 1 die Position gespeichert werden soll (TP1 Enable pos edge = true), bei einer negativen Flanke (TP1 Enable neg edge = true) oder in beiden Fällen (beide auf "true" setzen). - Mit TP1 Continous wird entschieden, ob nur beim ersten Event die Position gespeichert werden soll (TP1 Continous = false) oder ob das bei jedem Event geschehen soll (TP1 Continous = true). Sind beispielsweise TP1 Continous und TP1 Enable pos edge gesetzt, wird bei jeder steigenden Flanke am Eingang 1 der Klemme die Position gespeichert. Ist TP1 Enable neg edge gesetzt und TP1 Continous nicht, wird nur bei der ersten negativen Flanke am Eingang 1 der Klemme die Position gespeichert. Möchte man diesen Vorgang wiederholen, muss zunächst der TP1 Enable wieder deaktiviert und anschließend wieder aktiviert werden. Dann wird erneut bei der ersten negativen Flanke die Position gespeichert. - Der TP1 Trigger mode hat bei der EL72x keine Funktion. - Die gespeicherte Position der positiven Flanke kann in den Inputs der Prozessdaten unter TP1 Pos position, die der negativen Flanke kann unter TP1 Neg position ausgelesen werden. - Die Variablen unter Touch probe status dienen der Diagnose. - Die Touch Probe Eingänge müssen mit einem 1-Leiter +24V Signal angesprochen werden

48 EL Latchen
49 EL Fehlerdiagnose Diagnoseobjekte - 10F3 Diag History , 9018, A010, A
50 Danke für Ihre Aufmerksamkeit!
Applikation Adaption und Inbetriebnahme von Antrieben BG...CI von Dunkermotoren über CANopen an TwinCAT
 Applikation Adaption und Inbetriebnahme von Antrieben BG...CI von Dunkermotoren über CANopen an TwinCAT Kurzfassung: Beschreibung und Hinweise zu: CAN-Adresse, Baudrate Systemkonfiguration Achsparameter,
Applikation Adaption und Inbetriebnahme von Antrieben BG...CI von Dunkermotoren über CANopen an TwinCAT Kurzfassung: Beschreibung und Hinweise zu: CAN-Adresse, Baudrate Systemkonfiguration Achsparameter,
Korrektur zum Handbuch Ausgabe 02/2013. MOVIDRIVE MDX61B Applikation DriveSync über Feldbus
 Antriebstechnik \ Antriebsautomatisierung \ Systemintegration \ Services Korrektur zum Handbuch 17004403 Ausgabe 08/2010 MOVIDRIVE MDX61B Applikation DriveSync über Feldbus Ausgabe 02/2013 20116934 / DE
Antriebstechnik \ Antriebsautomatisierung \ Systemintegration \ Services Korrektur zum Handbuch 17004403 Ausgabe 08/2010 MOVIDRIVE MDX61B Applikation DriveSync über Feldbus Ausgabe 02/2013 20116934 / DE
Tabellenpositionierung 8400 HighLine
 Beschreibung Zur Vorgabe der Zielposition für eine Positionierung gibt es beim 8400 HighLine vier Möglichkeiten: 1. Umschalten zwischen mehreren Positionier-Profilen 2. Ändern der Zielposition im Profil
Beschreibung Zur Vorgabe der Zielposition für eine Positionierung gibt es beim 8400 HighLine vier Möglichkeiten: 1. Umschalten zwischen mehreren Positionier-Profilen 2. Ändern der Zielposition im Profil
Kurzinbetriebnahme MDrive Motion Control CANopen mit USB-CAN-Konverter MD-CC
 Kurzinbetriebnahme MDrive Motion Control CANopen mit USB-CAN-Konverter MD-CC500-000 1. Voraussetzungen: integrierter MDrive Antrieb MDIxxCBxxx mit CANopen-Schnittstelle Konverter-Kabel USB-CAN vom Typ
Kurzinbetriebnahme MDrive Motion Control CANopen mit USB-CAN-Konverter MD-CC500-000 1. Voraussetzungen: integrierter MDrive Antrieb MDIxxCBxxx mit CANopen-Schnittstelle Konverter-Kabel USB-CAN vom Typ
80DMW30 80DMW60 80DMW80. V dc Spannung Zwischenkreis / voltage DC-Link U P Nennstrom / rated current I N
 PCSi 6x, 3-6 W Kompakte EC-Motoreinheiten für Drehzahl-, Positionier- und Interpolationsanwendungen Sinuskommutierung mit feldorientierter Regelung (FOC) Feldbus, galvanisch entkoppelt Integrierter Bremschopper
PCSi 6x, 3-6 W Kompakte EC-Motoreinheiten für Drehzahl-, Positionier- und Interpolationsanwendungen Sinuskommutierung mit feldorientierter Regelung (FOC) Feldbus, galvanisch entkoppelt Integrierter Bremschopper
Schrittmotoren. Baureihe L
 Systemhaus für Antriebstechnik Motoren Regler Steuerungen Schrittmotoren Baureihe L Kompakte Bauformen Mit Kompakte Ansteuerung Low-Cost (optional) 3 Schrittwinkelgrößen Schrittmotoren mit Elektronik 1,8
Systemhaus für Antriebstechnik Motoren Regler Steuerungen Schrittmotoren Baureihe L Kompakte Bauformen Mit Kompakte Ansteuerung Low-Cost (optional) 3 Schrittwinkelgrößen Schrittmotoren mit Elektronik 1,8
JetMove 2xx Versions-Update von V2.14 auf V2.15
 JetMove 2xx Versions-Update von V2.14 auf V2.15 Auflage 1.00 08.12.2014/ Printed in Germany Versions-Update von V2.13 auf V2.145 JetMove 2xx 08.12.2014 Die Firma JETTER AG behält sich das Recht vor, Änderungen
JetMove 2xx Versions-Update von V2.14 auf V2.15 Auflage 1.00 08.12.2014/ Printed in Germany Versions-Update von V2.13 auf V2.145 JetMove 2xx 08.12.2014 Die Firma JETTER AG behält sich das Recht vor, Änderungen
Dokumentation. AX5000 Tuning - Guide. Version: Datum:
 Dokumentation AX5000 Tuning - Guide Version: Datum: 1.0 01.03.2017 Inhaltsverzeichnis Inhaltsverzeichnis 1 Vorwort... 4 1.1 Hinweise zur Dokumentation... 4 1.2 Ausgabestände der Dokumentation... 5 2 Sicherheit...
Dokumentation AX5000 Tuning - Guide Version: Datum: 1.0 01.03.2017 Inhaltsverzeichnis Inhaltsverzeichnis 1 Vorwort... 4 1.1 Hinweise zur Dokumentation... 4 1.2 Ausgabestände der Dokumentation... 5 2 Sicherheit...
Vorlesung Bewegungssteuerung durch geregelte elektrische Antriebe. Regelung 1
 Vorlesung Bewegungssteuerung durch geregelte elektrische Antriebe Regelung 1 Klassische Kaskade (Strom-, Drehmoment-, Drehzahl-Regelung) Regelung 2 Control Schemes s* Lageregelung position controller speed
Vorlesung Bewegungssteuerung durch geregelte elektrische Antriebe Regelung 1 Klassische Kaskade (Strom-, Drehmoment-, Drehzahl-Regelung) Regelung 2 Control Schemes s* Lageregelung position controller speed
Schrittmotoren Schrittmotoren mit Elektronik
 Schrittmotoren Schrittmotoren mit Elektronik Schrittmotor mit integriertem Controller - STP Nema 17 bis 34 Spitzendrehmomente bis zu 7Nm Servogeregelte Schrittmotoren Nema 8 bis 34 Spitzenmomenten bis
Schrittmotoren Schrittmotoren mit Elektronik Schrittmotor mit integriertem Controller - STP Nema 17 bis 34 Spitzendrehmomente bis zu 7Nm Servogeregelte Schrittmotoren Nema 8 bis 34 Spitzenmomenten bis
Maschinenwinkel- Synchronisation ohne zusätzliche Impulsgeber
 aschinenwinkel- Synchronisation ohne zusätzliche Impulsgeber Diese Anwendungen und gelten nur ab die Software Version 1.024.0 (DSP + CU) Stand 29.01.2009 V-1 Syncronisation.indd TAE Antriebstechnik Raiffeisenstraße
aschinenwinkel- Synchronisation ohne zusätzliche Impulsgeber Diese Anwendungen und gelten nur ab die Software Version 1.024.0 (DSP + CU) Stand 29.01.2009 V-1 Syncronisation.indd TAE Antriebstechnik Raiffeisenstraße
VDMA Forum Innovative Lösungen für Industrie 4.0 Messsystemdaten intelligent nutzen - Predictive Maintenance -
 Messsystemdaten intelligent nutzen - Predictive Maintenance - Dipl.-Ing.(FH) Kathrin Streibel, MSc. INHALT Wer ist FAGOR Automation Daten als Grundlage Verwendungsmöglichkeiten Nutzen für WEN? Fazit &
Messsystemdaten intelligent nutzen - Predictive Maintenance - Dipl.-Ing.(FH) Kathrin Streibel, MSc. INHALT Wer ist FAGOR Automation Daten als Grundlage Verwendungsmöglichkeiten Nutzen für WEN? Fazit &
RM30xx Profibus Kurzanleitung efector400
 RM30xx Profibus Kurzanleitung efector400 706414/00 Seite 1 von 13 ifm efector gmbh Inhalt Die Beschreibung kann vom Anwendersystem Abweichungen enthalten, da es bei verschiedenen Hersteller oder Softwareversionen
RM30xx Profibus Kurzanleitung efector400 706414/00 Seite 1 von 13 ifm efector gmbh Inhalt Die Beschreibung kann vom Anwendersystem Abweichungen enthalten, da es bei verschiedenen Hersteller oder Softwareversionen
Anbindung des MR-J4-TM EtherCat Verstärkers an eine Beckhoff Steuerung in TwinCat3
 Anbindung des MR-J4-TM EtherCat Verstärkers an eine Beckhoff Steuerung in TwinCat3 Inhalt 1. Verbindung zur Beckhoff Steuerung... 3 2. Anbindung des MR-J4-TM Ethercat an die Steuerung... 5 3. Anpassung
Anbindung des MR-J4-TM EtherCat Verstärkers an eine Beckhoff Steuerung in TwinCat3 Inhalt 1. Verbindung zur Beckhoff Steuerung... 3 2. Anbindung des MR-J4-TM Ethercat an die Steuerung... 5 3. Anpassung
Fachartikel. von Jörg Spiegelhalter, Produktmanager Encoder in der Division Motion Control Sensors der SICK STEGMANN GmbH, Donaueschingen
 Fachartikel EtherNet/IP-Encoder: Easy Integration mit Webserver und Funktionsblöcken von Jörg Spiegelhalter, Produktmanager Encoder in der Division Motion Control Sensors der SICK STEGMANN GmbH, Donaueschingen
Fachartikel EtherNet/IP-Encoder: Easy Integration mit Webserver und Funktionsblöcken von Jörg Spiegelhalter, Produktmanager Encoder in der Division Motion Control Sensors der SICK STEGMANN GmbH, Donaueschingen
Applikation servotec S2xxx FS Fahren über digitale Ein- und Ausgänge
 Applikation servotec S2xxx FS Fahren über digitale Ein- und Ausgänge Kurzfassung: Beschreibung und Hinweise zu: Einstellen der Parameter für die digitalen Ein- und Ausgänge Positionierung, Tippbetrieb,
Applikation servotec S2xxx FS Fahren über digitale Ein- und Ausgänge Kurzfassung: Beschreibung und Hinweise zu: Einstellen der Parameter für die digitalen Ein- und Ausgänge Positionierung, Tippbetrieb,
moog MSD Servo Drive Ausführungsbeschreibung TTL-Modul
 MSD Servo Drive Ausführungsbeschreibung TTL-Modul x 9 - x + - + x 6 x 7 MSD Ausführungsbeschreibung TTL-Modul x L L L HINWEIS: Dieses Dokument ersetzt nicht die Betriebsanleitung MSD Servo Drive. Bitte
MSD Servo Drive Ausführungsbeschreibung TTL-Modul x 9 - x + - + x 6 x 7 MSD Ausführungsbeschreibung TTL-Modul x L L L HINWEIS: Dieses Dokument ersetzt nicht die Betriebsanleitung MSD Servo Drive. Bitte
Servoverstärker AX2000 und AX2500
 Servoverstärker AX2000 und AX2500 Inbetriebnahmehinweise für Hiperface-Motoren Anschluss Die Feedbackleitung wird beim AX2000 an X1 und beim AX2500 an X2 angeschlossen. Parametrierung Die BECKHOFF Servoverstärker
Servoverstärker AX2000 und AX2500 Inbetriebnahmehinweise für Hiperface-Motoren Anschluss Die Feedbackleitung wird beim AX2000 an X1 und beim AX2500 an X2 angeschlossen. Parametrierung Die BECKHOFF Servoverstärker
JetMove 2xx Versions Update von V2.06 auf V2.07
 JetMove 2xx Versions Update von V2.06 auf V2.07 Auflage 1.00 25.10.2006/ Printed in Germany Versions Update von V2.06 auf V2.07 JetMove 2xx 25.10.2006 Die Firma JETTER AG behält sich das Recht vor, Änderungen
JetMove 2xx Versions Update von V2.06 auf V2.07 Auflage 1.00 25.10.2006/ Printed in Germany Versions Update von V2.06 auf V2.07 JetMove 2xx 25.10.2006 Die Firma JETTER AG behält sich das Recht vor, Änderungen
JM-600 Versions-Update von V1.21 auf V1.22
 JM-600 Versions-Update von V1.21 auf V1.22 Auflage 1.00 April 2008 / Printed in Germany JM-600 Die Firma Jetter AG behält sich das Recht vor, Änderungen an ihren Produkten vorzunehmen, die der technischen
JM-600 Versions-Update von V1.21 auf V1.22 Auflage 1.00 April 2008 / Printed in Germany JM-600 Die Firma Jetter AG behält sich das Recht vor, Änderungen an ihren Produkten vorzunehmen, die der technischen
Allgemein. Motorparameter Einheit Skalierung Kommando Nominalstrom (nur für I 2 T) [A] *10 2 IN Drehmomentstrom [A] *10 2 IP Polpaarzahl [1] - POL
![Allgemein. Motorparameter Einheit Skalierung Kommando Nominalstrom (nur für I 2 T) [A] *10 2 IN Drehmomentstrom [A] *10 2 IP Polpaarzahl [1] - POL](/thumbs/63/50139167.jpg "Allgemein. Motorparameter Einheit Skalierung Kommando Nominalstrom (nur für I 2 T) [A] *10 2 IN Drehmomentstrom [A] *10 2 IP Polpaarzahl [1] - POL") Parametrierung rotativer Motor gesteuert von Servocontroller XENAX Xvi75V8 Ausgabe Juli 2013 Allgemein Der Servocontroller XENAX Xvi75V8 kann rotative AC / DC / EC Servomotoren ansteuern. Bei bürstenbehafteten
Parametrierung rotativer Motor gesteuert von Servocontroller XENAX Xvi75V8 Ausgabe Juli 2013 Allgemein Der Servocontroller XENAX Xvi75V8 kann rotative AC / DC / EC Servomotoren ansteuern. Bei bürstenbehafteten
Regelungstechnik. Eine kurze Einführung
 Regelungstechnik Eine kurze Einführung Regelungstechnik Übersicht und Begriffe Zweipunkt-Regler PID-Regler Weitergehende Konzepte Praktische Umsetzung Simulation Regelung vs. Steuerung Wert einstellen,
Regelungstechnik Eine kurze Einführung Regelungstechnik Übersicht und Begriffe Zweipunkt-Regler PID-Regler Weitergehende Konzepte Praktische Umsetzung Simulation Regelung vs. Steuerung Wert einstellen,
KFB_ACS Prüfprotokoll V1.00
 KFB_ACS Prüfprotokoll V1.00 SmartControl GmbH, A. Widmer P0027/0065-0.DOC 1 von 21 Prüfungsbeschreibung Geprüfte Software KFB_ACS V1.00 P0027/0026-0 Softwarekomponenten KFB_CANOPEN V1.00 P0027/0026-0 KFB_SDO
KFB_ACS Prüfprotokoll V1.00 SmartControl GmbH, A. Widmer P0027/0065-0.DOC 1 von 21 Prüfungsbeschreibung Geprüfte Software KFB_ACS V1.00 P0027/0026-0 Softwarekomponenten KFB_CANOPEN V1.00 P0027/0026-0 KFB_SDO
ST7. Schrittmotorsteuerung
 ST7 Schrittmotorsteuerung 1. FUNKTION................................................................................................. 2 1.1. DATENBLATT... 2 1.1.1. Anwendung... 2 1.1.2. Daten... 2 1.1.3.
ST7 Schrittmotorsteuerung 1. FUNKTION................................................................................................. 2 1.1. DATENBLATT... 2 1.1.1. Anwendung... 2 1.1.2. Daten... 2 1.1.3.
Betriebsanleitung. X4 SVC Sensorless-Vektor-Steuerung
 Betriebsanleitung X4 SVC Sensorless-Vektor-Steuerung X4 Schnellinbetriebnahme Vektor-Modus Es gibt zwei Möglichkeiten, das Gerät für die Betriebsart vektorgesteuert ohne Drehzahlrückführung einzustellen:
Betriebsanleitung X4 SVC Sensorless-Vektor-Steuerung X4 Schnellinbetriebnahme Vektor-Modus Es gibt zwei Möglichkeiten, das Gerät für die Betriebsart vektorgesteuert ohne Drehzahlrückführung einzustellen:
Optimierung des SERVOSTAR 400/600
 Optimierung des SERVOSTAR 400/600 Wir begrüßen Sie bei der Kollmorgen Hilfe zur Optimierung der digitalen Servoverstärker SERVOSTAR 400/600. Die ersten drei Seiten dieses Dokuments beschreiben anhand eines
Optimierung des SERVOSTAR 400/600 Wir begrüßen Sie bei der Kollmorgen Hilfe zur Optimierung der digitalen Servoverstärker SERVOSTAR 400/600. Die ersten drei Seiten dieses Dokuments beschreiben anhand eines
Regel- und. Steuertechnik. Regel- und Steuertechnik
 Regel- und Steuertechnik Regel- und Steuertechnik 7 7 REGEL- UND STEUERTECHNIK INHALT 7 Regel- und Steuertechnik TEMPERATUR-REGELGERÄTE DP1/DP2 7.1.10 DP3/DP6 7.1.20 DPT6 bis DPT24 7.1.30 REGEL- UND STEUERGERÄTE
Regel- und Steuertechnik Regel- und Steuertechnik 7 7 REGEL- UND STEUERTECHNIK INHALT 7 Regel- und Steuertechnik TEMPERATUR-REGELGERÄTE DP1/DP2 7.1.10 DP3/DP6 7.1.20 DPT6 bis DPT24 7.1.30 REGEL- UND STEUERGERÄTE
ND556. Ausgangsstrom 1,4-5,6 A. Isolationsfestigkeit 500 M. Mechanische Spezifikationen (Einheit: mm, 1 inch = 25,4 mm)
") 3. Anwendungen Geeignet für die mittleren und kleinen automatisierten Anlagen und Geräte, wie CNC-Maschinen, Laser-Schneider, Plotter usw. Der ND556 ist speziell auf extrem niedriges Rauschen, geringe
3. Anwendungen Geeignet für die mittleren und kleinen automatisierten Anlagen und Geräte, wie CNC-Maschinen, Laser-Schneider, Plotter usw. Der ND556 ist speziell auf extrem niedriges Rauschen, geringe
LEGO MINDSTORMS NXT MIT LABVIEW 2009 PROGRAMMIEREN
 LEGO MINDSTORMS NXT MIT LABVIEW 2009 PROGRAMMIEREN Prof. Dr.-Ing. Dahlkemper Fabian Schwartau Patrick Voigt 1 NXT DIRECT COMMANDS Es gibt zwei verschiedene Möglichkeiten, den NXT zu programmieren: Es werden
LEGO MINDSTORMS NXT MIT LABVIEW 2009 PROGRAMMIEREN Prof. Dr.-Ing. Dahlkemper Fabian Schwartau Patrick Voigt 1 NXT DIRECT COMMANDS Es gibt zwei verschiedene Möglichkeiten, den NXT zu programmieren: Es werden
Druckregelung mit WAGO und WinFACT 7 (BORIS)
") Druckregelung mit WAGO und WinFACT 7 (BORIS) 1.) Aufrufen des Programms WinFACT 7 (BORIS) Über die Start Menüleiste gelangen Sie über Programme, WinFACT 7 und Blockorientierte Simulation BORIS in das Simulationsprogramm.
Druckregelung mit WAGO und WinFACT 7 (BORIS) 1.) Aufrufen des Programms WinFACT 7 (BORIS) Über die Start Menüleiste gelangen Sie über Programme, WinFACT 7 und Blockorientierte Simulation BORIS in das Simulationsprogramm.
ServoOne. Ausführungsbeschreibung. Option 2 - Technologie AC SO DC SO A A. TTL-Geber / TTL-Gebersimulation x 9 X 8. x 11. x 8. x 10.
 ϑ- ϑ+ ϑ- ϑ+ x 6 ServoOne Ausführungsbeschreibung AC SO 4-450 A DC SO 4-450 A Option 2 - Technologie x 11 L1 L2 L3 TTL-Geber / TTL-Gebersimulation x 9 ϑ- ϑ+ ϑ- ϑ+ x 10 x 7 x 8 X 8 2 Ausführungsbeschreibung
ϑ- ϑ+ ϑ- ϑ+ x 6 ServoOne Ausführungsbeschreibung AC SO 4-450 A DC SO 4-450 A Option 2 - Technologie x 11 L1 L2 L3 TTL-Geber / TTL-Gebersimulation x 9 ϑ- ϑ+ ϑ- ϑ+ x 10 x 7 x 8 X 8 2 Ausführungsbeschreibung
Handbuch. CAN 300 PRO - Anwendungsbeispiel DS402 Maxon. CAN Kommunikations-Baugruppe für S7-300 Anwendungsbeispiel für CANopen DS402 mit Maxon Motoren
 CAN 300 PRO - Anwendungsbeispiel DS402 Maxon CAN Kommunikations-Baugruppe für S7-300 Anwendungsbeispiel für CANopen DS402 mit Maxon Motoren Handbuch Ausgabe 4 / 22.12.2011 Systeme Helmholz GmbH Hannberger
CAN 300 PRO - Anwendungsbeispiel DS402 Maxon CAN Kommunikations-Baugruppe für S7-300 Anwendungsbeispiel für CANopen DS402 mit Maxon Motoren Handbuch Ausgabe 4 / 22.12.2011 Systeme Helmholz GmbH Hannberger
Sie haben die Möglichkeit durch unzählige Parameter die Software ihren Bedürfnissen Anzupassen
 1. Programmbeschreibung Durch die Software die extra für das RN-Power 4 neuentwickelt wurde, haben Sie die Möglichkeit ohne weitere Verschwendung von Rechenleistung, sei es von einem PC oder eines zweit
1. Programmbeschreibung Durch die Software die extra für das RN-Power 4 neuentwickelt wurde, haben Sie die Möglichkeit ohne weitere Verschwendung von Rechenleistung, sei es von einem PC oder eines zweit
M4400 Schrittmotormodul
 M4400 Schrittmotormodul Technische Beschreibung Eiserstraße 5 Telefon 05246/709-0 D-33415 Verl Telefax 05246/70980 Datum : 8.3.94 Version : 1.1 Seite 1 von 11 Inhaltsverzeichnis 1. Funktionsbeschreibung
M4400 Schrittmotormodul Technische Beschreibung Eiserstraße 5 Telefon 05246/709-0 D-33415 Verl Telefax 05246/70980 Datum : 8.3.94 Version : 1.1 Seite 1 von 11 Inhaltsverzeichnis 1. Funktionsbeschreibung
STO - Safe Torque Off
 Servo Drives mit STO - Safe Torque Off Indel Servo-Drives Sicherer Halt nach EN ISO 13849-1 GIN-SAC3 GIN-SAC3x3 INFO-SAC3 INFO-SAC3x3 Alle Indel Servo-Drives sind neu mit der Sicherheitsfunktion STO Safe
Servo Drives mit STO - Safe Torque Off Indel Servo-Drives Sicherer Halt nach EN ISO 13849-1 GIN-SAC3 GIN-SAC3x3 INFO-SAC3 INFO-SAC3x3 Alle Indel Servo-Drives sind neu mit der Sicherheitsfunktion STO Safe
ESCON 36/3 EC ESCON 70/
 ESCON Übersicht Die ESCON Servokontroller sind kompakte, leistungsstarke 4-Quadranten-PWM-Servokontroller zur effizienten Ansteuerung von permanentmagneterregten Gleichstrommotoren. ESCON Module 4/ 46603
ESCON Übersicht Die ESCON Servokontroller sind kompakte, leistungsstarke 4-Quadranten-PWM-Servokontroller zur effizienten Ansteuerung von permanentmagneterregten Gleichstrommotoren. ESCON Module 4/ 46603
Applikation Inbetriebnahme des Achsentyps intellimot an der PA-CONTROL
 Applikation Inbetriebnahme des Achsentyps intellimot an der PA-CONTROL Kurzfassung: Die PA-CONTROL kommuniziert mit den intellimot-antrieben (IMxxxx) über den CANopen-Bus nach dem Profil CIA-DSP402. In
Applikation Inbetriebnahme des Achsentyps intellimot an der PA-CONTROL Kurzfassung: Die PA-CONTROL kommuniziert mit den intellimot-antrieben (IMxxxx) über den CANopen-Bus nach dem Profil CIA-DSP402. In
UNTERSCHIEDE SD6 - SD7
 UNTERSCHIEDE SD6 - SD7 Seite 1 Inhaltsverzeichnis 1 Allgemeines 3 2 Funktionsunterschiede 4 3 Unterschiede Sollwert-Skalierung (nur Verstärker) 6 4 Unterschiede digitale Eingänge WAG-Standard zu SD6 7
UNTERSCHIEDE SD6 - SD7 Seite 1 Inhaltsverzeichnis 1 Allgemeines 3 2 Funktionsunterschiede 4 3 Unterschiede Sollwert-Skalierung (nur Verstärker) 6 4 Unterschiede digitale Eingänge WAG-Standard zu SD6 7
Applikation servotec S2 Fahren über digitale Ein- und Ausgänge
 Applikation servotec S2 Fahren über digitale Ein- und Ausgänge Kurzfassung: Beschreibung und Hinweise zu: Einstellen der Parameter für die digitalen Ein- und Ausgänge Positionierung, Tippbetrieb, Referenzierung
Applikation servotec S2 Fahren über digitale Ein- und Ausgänge Kurzfassung: Beschreibung und Hinweise zu: Einstellen der Parameter für die digitalen Ein- und Ausgänge Positionierung, Tippbetrieb, Referenzierung
Copyright 2016, ifm electronic gmbh. Vendor ID / 0x Bytes: / 0x00 0x01 0x73
 Version: V.. Release Date: 26-8-24 Copyright 26, ifm electnic gmbh KQ Vendor ID Vendor Vendor Text Vendor URL Device ID 3 / x36 - s: 54 / x x36 ifm electnic gmbh www.ifm.com http://www.ifm.com/ifmgb/web/io-link_down.htm
Version: V.. Release Date: 26-8-24 Copyright 26, ifm electnic gmbh KQ Vendor ID Vendor Vendor Text Vendor URL Device ID 3 / x36 - s: 54 / x x36 ifm electnic gmbh www.ifm.com http://www.ifm.com/ifmgb/web/io-link_down.htm
Auto-Tuning-Tool FAST für starre und teilelastische Systeme
 ARS 2000 Appl. Note 107 1 v. 8 1 Inhalt 1 Inhalt...1 2 Einleitung...1 3 Einführung FAST...2 2 Einleitung Die in dieser Application Note beschriebenen Funktionen sind in den Servopositionierreglern der
ARS 2000 Appl. Note 107 1 v. 8 1 Inhalt 1 Inhalt...1 2 Einleitung...1 3 Einführung FAST...2 2 Einleitung Die in dieser Application Note beschriebenen Funktionen sind in den Servopositionierreglern der
JX2-SM1D JX2-SM1D. Intelligent extension module for one stepper motor axis with integrated amplifi er for 2 phases stepper motor.
 JX2-SM1D Positionssteuerung und Endstufe 70 V / 5 A für 2-Phasen Schrittmotor Positionierbereich -8.388.608.. +8.388.607 Schritte Schrittfrequenz max. 25 khz Start-/Stopprampe linear, programmierbar Capture-Funktion
JX2-SM1D Positionssteuerung und Endstufe 70 V / 5 A für 2-Phasen Schrittmotor Positionierbereich -8.388.608.. +8.388.607 Schritte Schrittfrequenz max. 25 khz Start-/Stopprampe linear, programmierbar Capture-Funktion
HYBRID SERVO DRIVER ES-DH2306
 MERKMALE: Closed-loop, eliminiert Schrittverluste bzw. Verlust der Synchronisation Versorgungsspannung: 150-230 VAC oder 212-325 VDC Exzellente Reaktionszeiten, schnelle Beschleunigung und sehr großes
MERKMALE: Closed-loop, eliminiert Schrittverluste bzw. Verlust der Synchronisation Versorgungsspannung: 150-230 VAC oder 212-325 VDC Exzellente Reaktionszeiten, schnelle Beschleunigung und sehr großes
Plant Data Services Frei verwendbar Siemens AG 2016 siemens.de/plant-data-services
 Plant Data Services Frei verwendbar Siemens AG 26 siemens.de/plant-data-services Wir alle fragen uns Schöpft meine Anlage ihr volles Potenzial aus? Kennen wir das volle Potenzial unserer installierten
Plant Data Services Frei verwendbar Siemens AG 26 siemens.de/plant-data-services Wir alle fragen uns Schöpft meine Anlage ihr volles Potenzial aus? Kennen wir das volle Potenzial unserer installierten
Betriebsartenwahlschalter. Zustimmungsschalter. Applikationsbeispiel (Lenze-Dokumentennummer) Lenze-Dokumentennummer:
 Lenze-Dokumentennummer:") Applikationsbeispiel 200704507 (Lenze-Dokumentennummer) Betriebsartenwahlschalter / Zustimmungsschalter Datum: 09.10.2015 Seite 1/11 1 Ziel -----------------------------------------------------------------------------------------------------------------
Applikationsbeispiel 200704507 (Lenze-Dokumentennummer) Betriebsartenwahlschalter / Zustimmungsschalter Datum: 09.10.2015 Seite 1/11 1 Ziel -----------------------------------------------------------------------------------------------------------------
EtherNet/IP Topology and Engineering MPx06/07/08VRS
 EtherNet/IP Topology and Engineering MPx06/07/08VRS 3 1. Engineering via free EtherNet/IPTM-Port of a device on Bus from MPx07V10 2. Engineering via optional Industrial-Ethernet-Switch 3. Engineering via
EtherNet/IP Topology and Engineering MPx06/07/08VRS 3 1. Engineering via free EtherNet/IPTM-Port of a device on Bus from MPx07V10 2. Engineering via optional Industrial-Ethernet-Switch 3. Engineering via
1. Schema Takt-/Richtungsmodus der ServoTrack-Steuerung (ohne Stromregelung am Treiber)
") Beispieleinstellungen ServoTrack TM im Takt/Richtungs-Modus zusammen mit einem Takt-/Richtungs-Mikroschritt-Treiber mit 16 Mikroschritten ohne Stromregelung 1. Schema Takt-/Richtungsmodus der ServoTrack-Steuerung
Beispieleinstellungen ServoTrack TM im Takt/Richtungs-Modus zusammen mit einem Takt-/Richtungs-Mikroschritt-Treiber mit 16 Mikroschritten ohne Stromregelung 1. Schema Takt-/Richtungsmodus der ServoTrack-Steuerung
Datenblatt C2-10 Steuerung
 Steuerung Aufbau- und Anschlussanleitung Die C2-10 Steuerung wurde entwickelt um die Bedienung und die Sicherheit von Hubzylinder zu vereinfachen. Einfache An-Aus-Vorgänge, sowie Richtungswechsel können
Steuerung Aufbau- und Anschlussanleitung Die C2-10 Steuerung wurde entwickelt um die Bedienung und die Sicherheit von Hubzylinder zu vereinfachen. Einfache An-Aus-Vorgänge, sowie Richtungswechsel können
Maschinenwinkel- Synchronisation ohne zusätzliche Impulsgeber
 aschinenwinkel- Synchronisation ohne zusätzliche Impulsgeber Ergänzung zur TA-BL/P-Beschreibung Diese Anwendungen und Parameter gelten nur für die Software Version Bl60453 TAE Antriebstechnik GmbH Am Kappengraben
aschinenwinkel- Synchronisation ohne zusätzliche Impulsgeber Ergänzung zur TA-BL/P-Beschreibung Diese Anwendungen und Parameter gelten nur für die Software Version Bl60453 TAE Antriebstechnik GmbH Am Kappengraben
Kompakter Lineartisch
 Kompakter Lineartisch XY(Z)-Kombinationen mit vielen Antriebs- und Stellwegvarianten M-110 M-111 M-112 Sehr kompakt durch gefalteten Antrieb Schrittmotoren und geregelte DC- Motoren Gewinde- und Kugelumlaufspindeln
Kompakter Lineartisch XY(Z)-Kombinationen mit vielen Antriebs- und Stellwegvarianten M-110 M-111 M-112 Sehr kompakt durch gefalteten Antrieb Schrittmotoren und geregelte DC- Motoren Gewinde- und Kugelumlaufspindeln
moog MSD Servo Drive Ausführungsbeschreibung Option 2 - Technologie Sin/Cos-Geber
 MSD Servo Drive Ausführungsbeschreibung Option 2 - Technologie Sin/Cos-Geber 2 Ausführungsbeschreibung Option 2 - Technologie Sin/Cos-Geber Id.-Nr.: CB1516-002, Rev. 1.1 Stand: 04/2017 HINWEIS: Dieses
MSD Servo Drive Ausführungsbeschreibung Option 2 - Technologie Sin/Cos-Geber 2 Ausführungsbeschreibung Option 2 - Technologie Sin/Cos-Geber Id.-Nr.: CB1516-002, Rev. 1.1 Stand: 04/2017 HINWEIS: Dieses
Trends bei intelligenten embedded Schrittmotortreibern
 Trends bei intelligenten embedded Schrittmotortreibern Nürnberg, 24.11.2010 Dipl.-Ing. T. Ostermann, mechapro GmbH Inhalt Aufbau konventioneller Systeme mit und ohne Feldbus Anforderungen an eine in den
Trends bei intelligenten embedded Schrittmotortreibern Nürnberg, 24.11.2010 Dipl.-Ing. T. Ostermann, mechapro GmbH Inhalt Aufbau konventioneller Systeme mit und ohne Feldbus Anforderungen an eine in den
moog MSD Servodrive Ausführungsbeschreibung + 2 analoge Ausgänge
 MSD Servodrive Ausführungsbeschreibung + 2 analoge Ausgänge ! MSD Servodrive Ausführungsbeschreibung + 2AO für MSD Servodrive Id.-Nr.: CA79904-002 Rev. 1.0 1109 Gültig ab Firmwarestand: V1.1 Dieses Dokument
MSD Servodrive Ausführungsbeschreibung + 2 analoge Ausgänge ! MSD Servodrive Ausführungsbeschreibung + 2AO für MSD Servodrive Id.-Nr.: CA79904-002 Rev. 1.0 1109 Gültig ab Firmwarestand: V1.1 Dieses Dokument
MSD Servo Drive Ausführungsbeschreibung
 MSD Servo Drive Ausführungsbeschreibung + 2 analoge Ausgänge 2 Dieses Dokument ersetzt nicht die MSD Servo Drive Betriebsanleitung. Bitte beachten Sie unbedingt die Informationen über "Maßnahmen zu Ihrer
MSD Servo Drive Ausführungsbeschreibung + 2 analoge Ausgänge 2 Dieses Dokument ersetzt nicht die MSD Servo Drive Betriebsanleitung. Bitte beachten Sie unbedingt die Informationen über "Maßnahmen zu Ihrer
Kommunikation. Features. Gerät. Ausgabedatum Version V
 Version V... Ausgabedatum 27--3 AU Hersteller ID Geräte ID Herstellername Herstellertext Hersteller URL 837 x39 autosen gmbh www.autosen.com https://autosen.com/pducts/ad2/ad2-io-link-parametriersoftware/
Version V... Ausgabedatum 27--3 AU Hersteller ID Geräte ID Herstellername Herstellertext Hersteller URL 837 x39 autosen gmbh www.autosen.com https://autosen.com/pducts/ad2/ad2-io-link-parametriersoftware/
MSD Servo Drive Ausführungsbeschreibung
 MSD Servo Drive Ausführungsbeschreibung + 2 analoge Ausgänge 2 Dieses Dokument ersetzt nicht die MSD Servo Drive Betriebsanleitung. Bitte beachten Sie unbedingt die Informationen über "Maßnahmen zu Ihrer
MSD Servo Drive Ausführungsbeschreibung + 2 analoge Ausgänge 2 Dieses Dokument ersetzt nicht die MSD Servo Drive Betriebsanleitung. Bitte beachten Sie unbedingt die Informationen über "Maßnahmen zu Ihrer
AUGUST 2017 SUG/U 1.1 Split Unit Gateway Produktpräsentation. STO/GPS, Produkt Management
 AUGUST 2017 Split Unit Gateway Produktpräsentation STO/GPS, Produkt Management Inhalt Überblick Funktionen Systemübersicht Technische Informationen Inbetriebnahme Diagnose i-bus Tool August 25, 2017 Slide
AUGUST 2017 Split Unit Gateway Produktpräsentation STO/GPS, Produkt Management Inhalt Überblick Funktionen Systemübersicht Technische Informationen Inbetriebnahme Diagnose i-bus Tool August 25, 2017 Slide
Besonderheiten und Einstellungen von BLDC-Motoren
 Besonderheiten und Einstellungen von BLDC-Motoren Besonderheiten von BLDC-Motoren Übung: Konfigurieren Sie die Eingänge 1 bis 3 low-aktiv. Besonderheiten von BLDC- Motoren auf der Registerkarte "Input"
Besonderheiten und Einstellungen von BLDC-Motoren Besonderheiten von BLDC-Motoren Übung: Konfigurieren Sie die Eingänge 1 bis 3 low-aktiv. Besonderheiten von BLDC- Motoren auf der Registerkarte "Input"
9 Inbetriebnahme MOVIMOT
 Wichtige Hinweise zur nbetriebnahme nbetriebnahme MOVMOT. Wichtige Hinweise zur nbetriebnahme Bei der nbetriebnahme unbedingt die Sicherheitshinweise beachten! Vor Abnahme/Aufsetzen des Anschlusskastendeckels
Wichtige Hinweise zur nbetriebnahme nbetriebnahme MOVMOT. Wichtige Hinweise zur nbetriebnahme Bei der nbetriebnahme unbedingt die Sicherheitshinweise beachten! Vor Abnahme/Aufsetzen des Anschlusskastendeckels
Einfluss von Spannungsoberschwingungen und Rastmomenten auf den Gleichlauf von Servoantrieben mit Permanentmagnet-Synchronmotoren
 Einfluss von Spannungsoberschwingungen und Rastmomenten auf den Gleichlauf von Servoantrieben mit Permanentmagnet-Synchronmotoren Influence of voltage harmonics and cogging torque on speed deviations of
Einfluss von Spannungsoberschwingungen und Rastmomenten auf den Gleichlauf von Servoantrieben mit Permanentmagnet-Synchronmotoren Influence of voltage harmonics and cogging torque on speed deviations of
maxon motor control EPOS4 Sensoren & Aufstarten der Sinus-Kommutierung
 : Sensoren für die Sinus-Kommutierung und Aktivierung Thema: Welche Art von Sensoren sind für eine Sinus-Kommutierung zwingend erforderlich? Ab welchem Zeitpunkt wird die Sinus-Kommutierung bei der ersten
: Sensoren für die Sinus-Kommutierung und Aktivierung Thema: Welche Art von Sensoren sind für eine Sinus-Kommutierung zwingend erforderlich? Ab welchem Zeitpunkt wird die Sinus-Kommutierung bei der ersten
ME742 Mikroschritt-Endstufe
 ME742 Mikroschritt-Endstufe Die ME742 ist eine leistungsstarke Mikroschritt-Endstufe mit reiner Sinus Spannung. Besonders geeignet für Anwendungen wo extrem saubere Laufruhe und geringe Wärmeentwicklung
ME742 Mikroschritt-Endstufe Die ME742 ist eine leistungsstarke Mikroschritt-Endstufe mit reiner Sinus Spannung. Besonders geeignet für Anwendungen wo extrem saubere Laufruhe und geringe Wärmeentwicklung
DAQ-System für DynoWare
 Elektronik & Software DAQ-System für DynoWare Datenerfassungssystem für die Kraftmessung 5697A... Datenerfassungssystem zum Anschluss und Steuerung von Ladungsverstärkern und Signal Conditionern in der
Elektronik & Software DAQ-System für DynoWare Datenerfassungssystem für die Kraftmessung 5697A... Datenerfassungssystem zum Anschluss und Steuerung von Ladungsverstärkern und Signal Conditionern in der
Page 1. Version: V1.3 Release Date: Copyright / 0x0136 Bytes: / 0x01 0x / 0x Bytes: / 0x00 0x3 0x49
 Version: V1.3 Release Date: 2017-10-22 Copyright 2017 DV Vendor ID Device ID Vendor Name Vendor Text Vendor URL 310 / 0x0136 Bytes: 01 36 / 0x01 0x36 841 / 0x000349 Bytes: 00 03 49 / 0x00 0x3 0x49 ifm
Version: V1.3 Release Date: 2017-10-22 Copyright 2017 DV Vendor ID Device ID Vendor Name Vendor Text Vendor URL 310 / 0x0136 Bytes: 01 36 / 0x01 0x36 841 / 0x000349 Bytes: 00 03 49 / 0x00 0x3 0x49 ifm
JetMove D203 Versions-Update von V2.13 auf V2.14
 JetMove D203 Versions-Update von V2.13 auf V2.14 Auflage 1.00 11.06.2012/ Printed in Germany Versions-Update von V2.13 auf V2.14 JetMove D203 11.06.2012 Die Firma JETTER AG behält sich das Recht vor, Änderungen
JetMove D203 Versions-Update von V2.13 auf V2.14 Auflage 1.00 11.06.2012/ Printed in Germany Versions-Update von V2.13 auf V2.14 JetMove D203 11.06.2012 Die Firma JETTER AG behält sich das Recht vor, Änderungen
JetMove 105 Versions Update von V auf V
 JetMove 105 Versions Update von V2.09.0.0 auf V2.10.0.0 Auflage 1.00 21.02.2008/ Printed in Germany Versions Update von V2.09.0.0 auf V2.10.0.0 JetMove 105 21.02.2008 Die Firma JETTER AG behält sich das
JetMove 105 Versions Update von V2.09.0.0 auf V2.10.0.0 Auflage 1.00 21.02.2008/ Printed in Germany Versions Update von V2.09.0.0 auf V2.10.0.0 JetMove 105 21.02.2008 Die Firma JETTER AG behält sich das
BEDIENUNGSANLEITUNG 1
 1 BEDIENUNGSANLEITUNG Inhaltsverzeichnis 1. Sicherheitshinweise...... 3 2. Technische Daten... 3 3. Bedienung und Funktion... 4 4. Bedienung... 5 2 1. Sicherheitshinweise 1. Dieses Gerät ist nur für die
1 BEDIENUNGSANLEITUNG Inhaltsverzeichnis 1. Sicherheitshinweise...... 3 2. Technische Daten... 3 3. Bedienung und Funktion... 4 4. Bedienung... 5 2 1. Sicherheitshinweise 1. Dieses Gerät ist nur für die
KNX/DALI Gateway Applikation 983x04 Neue Funktionen
 KNX/DALI Gateway Applikation 983x04 Neue Funktionen Siemens.ch/knx Erweiterungen - Funktionen Einschaltwert für Nachtbetrieb Sammelstatusobjekte Statusseite zur besseren Übersicht Gespeicherte Szenenwerte
KNX/DALI Gateway Applikation 983x04 Neue Funktionen Siemens.ch/knx Erweiterungen - Funktionen Einschaltwert für Nachtbetrieb Sammelstatusobjekte Statusseite zur besseren Übersicht Gespeicherte Szenenwerte
Applikationsschrift Steuerung der servotec S2xxx FS über CANopen
 Applikationsschrift Steuerung der servotec S2xxx FS über CANopen Kurzfassung: Ein servotec S2xxx FS soll über den CAN-Bus (CANopen) von einem Master, eine SPS oder ein PC gesteuert werden. In diesem Handbuch
Applikationsschrift Steuerung der servotec S2xxx FS über CANopen Kurzfassung: Ein servotec S2xxx FS soll über den CAN-Bus (CANopen) von einem Master, eine SPS oder ein PC gesteuert werden. In diesem Handbuch
Calantec GmbH www.calantec.de
 Calantec GmbH www.calantec.de Motorsteuerungen CL-Serie Benutzerhandbuch Version 1.10 Calantec GmbH Automatisierungstechnik, Industrieelektronik Aufgang B Helmholtzstraße 2-9 Telefon: 030 453 01 519 Geschäftsführer:
Calantec GmbH www.calantec.de Motorsteuerungen CL-Serie Benutzerhandbuch Version 1.10 Calantec GmbH Automatisierungstechnik, Industrieelektronik Aufgang B Helmholtzstraße 2-9 Telefon: 030 453 01 519 Geschäftsführer:
ND556 Mikroschritt-Endstufe
 ND556 Mikroschritt-Endstufe Die ND556 ist eine leistungsstarke Mikroschritt-Endstufe mit reiner Sinus Spannung. Besonders geeignet für Anwendungen wo extrem saubere Laufruhe und geringe Wärmeentwicklung
ND556 Mikroschritt-Endstufe Die ND556 ist eine leistungsstarke Mikroschritt-Endstufe mit reiner Sinus Spannung. Besonders geeignet für Anwendungen wo extrem saubere Laufruhe und geringe Wärmeentwicklung
Speed Controller 2-Quadranten PWM über PC konfigurierbar
 2-Quadranten PWM über PC konfigurierbar Kombinierbar mit: DC-Kleinstmotoren und Bürstenlosen DC-Servomotoren Serie SC 1801 Versorgungsspannung für Elektronik Versorgungsspannung für Motor Max. Dauer-Ausgangsstrom
2-Quadranten PWM über PC konfigurierbar Kombinierbar mit: DC-Kleinstmotoren und Bürstenlosen DC-Servomotoren Serie SC 1801 Versorgungsspannung für Elektronik Versorgungsspannung für Motor Max. Dauer-Ausgangsstrom
Applikation. PA-CONTROL mit Ein- und Ausgängen am CAN-BUS
 Applikation PA-CONTROL mit Ein- und Ausgängen am CAN-BUS Kurzfassung: In dieser Applikationsschrift wird aufgezeigt, wie digitale und analoge Ein- und Ausgänge über den CAN-BUS von der PA-CONTROL bedient
Applikation PA-CONTROL mit Ein- und Ausgängen am CAN-BUS Kurzfassung: In dieser Applikationsschrift wird aufgezeigt, wie digitale und analoge Ein- und Ausgänge über den CAN-BUS von der PA-CONTROL bedient
1.) Aufrufen des Programms WinFACT 7 (BORIS)
 Aufrufen des Programms WinFACT 7 (BORIS)") Dampftemperaturregelung mit WAGO und WinFACT 7 (BORIS) 1.) Aufrufen des Programms WinFACT 7 (BORIS) Über die Start Menüleiste gelangen Sie über Programme, WinFACT 7 und Blockorientierte Simulation BORIS
Dampftemperaturregelung mit WAGO und WinFACT 7 (BORIS) 1.) Aufrufen des Programms WinFACT 7 (BORIS) Über die Start Menüleiste gelangen Sie über Programme, WinFACT 7 und Blockorientierte Simulation BORIS
ServoOne. Ausführungsbeschreibung. Option 2 - Technologie AC SO DC SO. SinCos-Geber A A. x 11. x 8 X 8. x 10. x 9. x 7.
 ϑ- ϑ+ ϑ- ϑ+ x 6 x 11 L1 L2 L ServoOne Ausführungsbeschreibung AC SO 4-450 A DC SO 4-450 A Option 2 - Technologie x 9 ϑ- ϑ+ ϑ- ϑ+ x 10 x 7 x 8 X 8 SinCos-Geber Ausführungsbeschreibung Option 2 - Technologie
ϑ- ϑ+ ϑ- ϑ+ x 6 x 11 L1 L2 L ServoOne Ausführungsbeschreibung AC SO 4-450 A DC SO 4-450 A Option 2 - Technologie x 9 ϑ- ϑ+ ϑ- ϑ+ x 10 x 7 x 8 X 8 SinCos-Geber Ausführungsbeschreibung Option 2 - Technologie
KISSsys Anleitung 012: Berechnung der Kinematik
 KISSsoft AG Frauwis 1 CH - 8634 Hombrechtikon Telefon: +41 55 264 20 30 Fax: +41 55 264 20 33 Email: info@kisssoft.ch Berechnungssoftware für den Maschinenbau KISSsys Anleitung: Berechnung der Kinematik
KISSsoft AG Frauwis 1 CH - 8634 Hombrechtikon Telefon: +41 55 264 20 30 Fax: +41 55 264 20 33 Email: info@kisssoft.ch Berechnungssoftware für den Maschinenbau KISSsys Anleitung: Berechnung der Kinematik
STRÖTER Verstellgetriebe / Variable speed gear Auswahllisten / Selection table
 Information zu den Auswahllisten Information for selection table In den Auswahllisten stehen folgende Daten : In the tables will be found the following data : Antriebsleistung [ kw ] Motor power [ kw ]
Information zu den Auswahllisten Information for selection table In den Auswahllisten stehen folgende Daten : In the tables will be found the following data : Antriebsleistung [ kw ] Motor power [ kw ]
Advanced Motion Control Techniques. Dipl. Ing. Jan Braun maxon motor ag Switzerland
 Advanced Motion Control Techniques Dipl. Ing. Jan Braun maxon motor ag Switzerland Agenda Schematiascher Aufbau Positionsregelkreis Übersicht Motion Control Systeme PC based mit CANopen für DC und EC Motoren
Advanced Motion Control Techniques Dipl. Ing. Jan Braun maxon motor ag Switzerland Agenda Schematiascher Aufbau Positionsregelkreis Übersicht Motion Control Systeme PC based mit CANopen für DC und EC Motoren
Incremental-Encoder. Technische Beschreibung. Eiserstraße 5 Telefon 05246/ Verl Telefax 05246/
 M3200 Incremental-Encoder Technische Beschreibung Eiserstraße 5 Telefon 05246/963-0 33415 Verl Telefax 05246/963-149 Datum 21.06.95 Version 1.0 Seite 1 von 9 Inhaltsverzeichnis 1. Funktionsbeschreibung
M3200 Incremental-Encoder Technische Beschreibung Eiserstraße 5 Telefon 05246/963-0 33415 Verl Telefax 05246/963-149 Datum 21.06.95 Version 1.0 Seite 1 von 9 Inhaltsverzeichnis 1. Funktionsbeschreibung
Der MIDI Manager. Parameter der einzelnen Slots Globale Parameter Mixer / Effects Clock System Parameter. - Tactive Instrument Modeller
 Der Parameter der einzelnen Slots Globale Parameter Mixer / Effects Clock System Parameter - Tactive Instrument Modeller Gesamt-Inhaltsverzeichnis Inhalt Index 1 Der Der ist immer geladen und wird über
Der Parameter der einzelnen Slots Globale Parameter Mixer / Effects Clock System Parameter - Tactive Instrument Modeller Gesamt-Inhaltsverzeichnis Inhalt Index 1 Der Der ist immer geladen und wird über
le u d o teckm T-S A erc h Et 526
 526 Busklemmen für die Leiterkarte 527 528 534 Die effiziente I/O-Lösung für Serienanwendungen 530 532 533 Produktübersicht Systembeschreibung Technische Daten 535 535 EtherCAT-Koppler EtherCAT-Koppler
526 Busklemmen für die Leiterkarte 527 528 534 Die effiziente I/O-Lösung für Serienanwendungen 530 532 533 Produktübersicht Systembeschreibung Technische Daten 535 535 EtherCAT-Koppler EtherCAT-Koppler
RM30xx ProfiNet Kurzanleitung efector400
 RM30xx ProfiNet Kurzanleitung efector400 706415_DE.doc 706415/00 Seite 1 von 15 ifm efector gmbh Inhalt Die Beschreibung kann vom Anwendersystem Abweichungen enthalten, da es bei verschiedenen Hersteller
RM30xx ProfiNet Kurzanleitung efector400 706415_DE.doc 706415/00 Seite 1 von 15 ifm efector gmbh Inhalt Die Beschreibung kann vom Anwendersystem Abweichungen enthalten, da es bei verschiedenen Hersteller
PS D Laserscanner für Profilmessung > 60 m, bis 40 Hz Scanrate. Features. Anwendungsvorteile
 PS60-90 2D Laserscanner für Profilmessung > 60 m, bis 40 Hz Scanrate Features Extrem kleiner Meßfleck Wählbare Meßart: Scanfrequenz 40 Hz im Fast -Mode Spot-Raster 0,023 im Fine -Mode Genauigkeit 4 mm
PS60-90 2D Laserscanner für Profilmessung > 60 m, bis 40 Hz Scanrate Features Extrem kleiner Meßfleck Wählbare Meßart: Scanfrequenz 40 Hz im Fast -Mode Spot-Raster 0,023 im Fine -Mode Genauigkeit 4 mm
Page 1. Version: V1.0.8 Release Date: Copyright / 0x0136 Bytes: / 0x01 0x / 0x00021E Bytes: E / 0x00 0x02 0x1E
 Version: V1.0.8 Release Date: 2016-05-12 Copyright 2016 DF Vendor ID Device ID Vendor Name Vendor Text Vendor URL 310 / 0x0136 Bytes: 01 36 / 0x01 0x36 542 / 0x00021E Bytes: 00 02 1E / 0x00 0x02 0x1E ifm
Version: V1.0.8 Release Date: 2016-05-12 Copyright 2016 DF Vendor ID Device ID Vendor Name Vendor Text Vendor URL 310 / 0x0136 Bytes: 01 36 / 0x01 0x36 542 / 0x00021E Bytes: 00 02 1E / 0x00 0x02 0x1E ifm
Absolutwertgeber GEL 2x Analog+SSI
 Absolutwertgeber GEL 2x Analog+SSI mit Analog- oder SSI-Ausgang Referenz D-01R-2x_An-SSI (1.0) Irrtum und technische Änderungen vorbehalten. 2012-08 Herausgeber: Lenord, Bauer & Co. GmbH Dohlenstraße 32
Absolutwertgeber GEL 2x Analog+SSI mit Analog- oder SSI-Ausgang Referenz D-01R-2x_An-SSI (1.0) Irrtum und technische Änderungen vorbehalten. 2012-08 Herausgeber: Lenord, Bauer & Co. GmbH Dohlenstraße 32
Logic Express 8 Arbeiten mit Apogee Hardware
 Logic Express 8 Arbeiten mit Apogee Hardware Logic Express bietet ein spezifisches Kontrollfeld, mit dem Sie die Duet- und Ensemble- Hardware von Apogee direkt konfigurieren können. Hinweis: Das Kontrollfeld
Logic Express 8 Arbeiten mit Apogee Hardware Logic Express bietet ein spezifisches Kontrollfeld, mit dem Sie die Duet- und Ensemble- Hardware von Apogee direkt konfigurieren können. Hinweis: Das Kontrollfeld
Datenblatt. Remote-I/O - u-remote UR20-4AO-UI or 4-wire connection; 16-bit resolution; 4 outputs
 2- or 4-wire connection; 16-bit resolution; 4 outputs The analogue output module controls up to 4 analogue actuators with +/-10 V, +/-5 V, 0...10 V, 0...5 V, 2...10 V, 1...5 V, 0...20 ma or 4...20 ma with
2- or 4-wire connection; 16-bit resolution; 4 outputs The analogue output module controls up to 4 analogue actuators with +/-10 V, +/-5 V, 0...10 V, 0...5 V, 2...10 V, 1...5 V, 0...20 ma or 4...20 ma with
Nummer des Technologie-Alarms (<TO>.ErrorDetail.Number) Abhilfe für den Technologie-Alarm Wirksame Alarmreaktion (<TO>.ErrorDetail.
 Abhilfe für den Technologie-Alarm Wirksame Alarmreaktion (<TO>.ErrorDetail.") Legende Nummer des s () für den Wirksame Alarmreaktion () 0 = Keine 1 = Stopp mit aktuellen Dyn mikwerten 2 = Stopp mit maximalen Dynamikwerten 3 = Stopp mit Notstopp-Rampe 4 = Freigabe wegnehmen Zum Quittieren
Legende Nummer des s () für den Wirksame Alarmreaktion () 0 = Keine 1 = Stopp mit aktuellen Dyn mikwerten 2 = Stopp mit maximalen Dynamikwerten 3 = Stopp mit Notstopp-Rampe 4 = Freigabe wegnehmen Zum Quittieren
Beschreibung Modell Motorspindel
 Beschreibung Modell Motorspindel Allgemein : Mit dem Modell Motorspindel können sowohl Übungen im Bereich der Regelungstechnik als auch Aufgaben in der Controllertechnik mit allen gängigen Bussystemen
Beschreibung Modell Motorspindel Allgemein : Mit dem Modell Motorspindel können sowohl Übungen im Bereich der Regelungstechnik als auch Aufgaben in der Controllertechnik mit allen gängigen Bussystemen
Bandvorschub AV 40. Kurz - Info. Techn. Änderungen vorbehalten - Doku-Nr.:KI-AV-40-AH-04-DE
 Kurz - Info Anwendungsbereiche Der AV40 ist ein mit AC-Servo-Motor angetriebener Walzenvorschub und dient zum Vorschieben und Positionieren von Metallbändern in Stanzwerkzeugen Der AV40 kann an allen gängigen
Kurz - Info Anwendungsbereiche Der AV40 ist ein mit AC-Servo-Motor angetriebener Walzenvorschub und dient zum Vorschieben und Positionieren von Metallbändern in Stanzwerkzeugen Der AV40 kann an allen gängigen
BATT Auslesen des Batteriestatus CLOCK Setzen/Auslesen des Uhren- und Datumwertes... 4
 Inhalt Externe System-Bibliothek... 2 Voraussetzungen für die Verwendung der Bibliothek... 2 Besonderheiten der externen System-Bibliothek... 2 Bestandteile der externen System-Bibliothek... 2 Bausteinübersicht,
Inhalt Externe System-Bibliothek... 2 Voraussetzungen für die Verwendung der Bibliothek... 2 Besonderheiten der externen System-Bibliothek... 2 Bestandteile der externen System-Bibliothek... 2 Bausteinübersicht,
CiA 402 Controller Based Mode Softwarehandbuch
 CiA 402 Controller Based Mode Softwarehandbuch de 03/2014 V 6.0-C Inhaltsverzeichnis 1 Allgemeines.................................... 3 2............................. 7 3 CBM-Inbetriebnahme...........................
CiA 402 Controller Based Mode Softwarehandbuch de 03/2014 V 6.0-C Inhaltsverzeichnis 1 Allgemeines.................................... 3 2............................. 7 3 CBM-Inbetriebnahme...........................
Herzlich Willkommen. Hilfreiche Zusatzfunktionen in JUMO-Reglern. Dipl.-Ing. Manfred Schleicher
 Herzlich Willkommen Hilfreiche Zusatzfunktionen in JUMO-Reglern Dipl.-Ing. Manfred Schleicher Mit JUMO-Kompaktreglern werden Zweipunkt-, Dreipunkt-, Stetige-, Dreipunktschritt- und Stellungsregler realisiert
Herzlich Willkommen Hilfreiche Zusatzfunktionen in JUMO-Reglern Dipl.-Ing. Manfred Schleicher Mit JUMO-Kompaktreglern werden Zweipunkt-, Dreipunkt-, Stetige-, Dreipunktschritt- und Stellungsregler realisiert
Entwicklung und sensorlose Regelung von PM-Außenläufer- Traktions-Maschinen. Development and Sensorless Control of PM Outer Rotor Traction Machines
 Entwicklung und sensorlose Regelung von PM-Außenläufer- Traktions-Maschinen Development and Sensorless Control of PM Outer Rotor Traction Machines Florian Demmelmayr 04. Juli 2013 Überblick Motivation
Entwicklung und sensorlose Regelung von PM-Außenläufer- Traktions-Maschinen Development and Sensorless Control of PM Outer Rotor Traction Machines Florian Demmelmayr 04. Juli 2013 Überblick Motivation
AS2000 Schrittmotoren
 AS2000 AS2000 Schrittmotoren 406 Mit den neuen Zweiphasen- Schrittmotoren AS2000 mit einem Schrittwinkel von 1,8 wird die Lücke zum High-Performance-Servomotor AM8000 verkleinert. Die Schrittmotoren mit
AS2000 AS2000 Schrittmotoren 406 Mit den neuen Zweiphasen- Schrittmotoren AS2000 mit einem Schrittwinkel von 1,8 wird die Lücke zum High-Performance-Servomotor AM8000 verkleinert. Die Schrittmotoren mit
1 Achsen Servosteuerung Mammut
 1 Achsen Servosteuerung Mammut Was ist die Mammut? Die Mammut ist eine CNC Steuerung der 2. Generation, sie ist für höheren Strom und Spannung ausgelegt wie die Whale2.In dieser Dokumentation wird erklärt
1 Achsen Servosteuerung Mammut Was ist die Mammut? Die Mammut ist eine CNC Steuerung der 2. Generation, sie ist für höheren Strom und Spannung ausgelegt wie die Whale2.In dieser Dokumentation wird erklärt
9400 mit SM301 und ECS Sicherer Stopp 1 und Ansteuerung von ECS durch ein SM301 (Architektur nach PL d der EN ISO und SIL 2 der IEC 62061)
") 9400 mit SM301 und ECS Sicherer Stopp 1 und Ansteuerung von ECS durch ein SM301 (Architektur nach PL d der EN ISO 13849-1 und SIL 2 der IEC 62061) Verdrahtungsskizze (Ausschnitt): DI E94AxHExxxx X5 Achse
9400 mit SM301 und ECS Sicherer Stopp 1 und Ansteuerung von ECS durch ein SM301 (Architektur nach PL d der EN ISO 13849-1 und SIL 2 der IEC 62061) Verdrahtungsskizze (Ausschnitt): DI E94AxHExxxx X5 Achse
Wenn der Heizungsaktor nicht heizt
 Lösungen So geht s MDT Heizungsaktoren AKH-0400.01 AKH-0800.01 Wenn der Heizungsaktor nicht heizt Nachfolgend wird Ihnen eine Schritt für Schritt Anleitung aufgezeigt mit welcher Sie die gängigsten Fehler
Lösungen So geht s MDT Heizungsaktoren AKH-0400.01 AKH-0800.01 Wenn der Heizungsaktor nicht heizt Nachfolgend wird Ihnen eine Schritt für Schritt Anleitung aufgezeigt mit welcher Sie die gängigsten Fehler
Page 1. Version: V Release Date: Copyright / 0x0136 Bytes: / 0x01 0x / 0x00037C Bytes: C / 0x00 0x3 0x7C
 Version: V1.0.19 Release Date: 2017-09-22 Copyright 2017 DF Vendor ID Device ID Vendor Name Vendor Text Vendor URL 310 / 0x0136 Bytes: 01 36 / 0x01 0x36 892 / 0x00037C Bytes: 00 03 7C / 0x00 0x3 0x7C ifm
Version: V1.0.19 Release Date: 2017-09-22 Copyright 2017 DF Vendor ID Device ID Vendor Name Vendor Text Vendor URL 310 / 0x0136 Bytes: 01 36 / 0x01 0x36 892 / 0x00037C Bytes: 00 03 7C / 0x00 0x3 0x7C ifm
SINAMICS S120 an einer SIMATIC S über ein Technologieobjekt betreiben
 FAQ 02/2016 SINAMICS S120 an einer SIMATIC S7-1500 über ein Technologieobjekt betreiben TIA Portal V13 SP1 / SIMATIC S7-1500 / SINAMICS S120 https://support.industry.siemens.com/cs/ww/de/view/109482718
FAQ 02/2016 SINAMICS S120 an einer SIMATIC S7-1500 über ein Technologieobjekt betreiben TIA Portal V13 SP1 / SIMATIC S7-1500 / SINAMICS S120 https://support.industry.siemens.com/cs/ww/de/view/109482718