Grundlagen der Programmierung II BMI Bakk.
|
|
|
- Helge Blau
- vor 8 Jahren
- Abrufe
Transkript
1 BMI Bakk. Teil 2 Rainer Schubert Institut für Biomedizinische Bildanalyse Inhalt Aufbau eines µprozessors Grundbegriffe Allgemein PIC16F690 Ports Programmspeicher Datenspeicher RAM, ROM Spezialregister Erste Schritte zur Programmierung Befehlssatz Hello World Analyse und Erweiterung Hausarbeit

2 Grundbegriffe CPU: Central Processing Unit, Prozessorkern ALU: Arithmetic and Logic Unit, Rechenwerk RAM: Random Access Memory, Arbeitsspeicher ROM: Read Only Memory, kann (zur Laufzeit) nicht verändert werden EEPROM: Electrically Erasable and Programmable ROM, spezielles ROM Flash-Memory: Spezielles ROM Register: allg. Speicherzelle, meistens spezielle Zellen mit besonderer, reservierter Funktion PC: Programmcounter, Zähler für die aktuelle Programmposition Multiplexer: Selektionsschaltnetz zur Auswahl eines von mehreren Ein- oder Ausgängen Rechnerarchitekturen von Neumann Computer (alle PCs, Notebooks etc.): CPU / ALU Input Port Speicher für Daten und Programme Output Port

3 Harvard-Architektur Rechnerarchitekturen Speicher für Programme ROM (nicht flüchtig, typisch: Flash) Input Port CPU / ALU Speicher für Daten Output Port RAM (flüchtig) Rechnerarchitekturen von Neumann Architektur: Vorteile Laden und Wechsel von Programmen jederzeit zur Laufzeit möglich Einheitliche Adresslogik Insgesamt das mächtigere, allgemeiner verwendbare Konzept Nachteil: Ressourcen für spezifische, immer gleich bleibende Aufgaben überdimensioniert Harvard-Architektur: Vorteile Programm- und Datenspeicher können unterschiedliche Eigenschaften und Adressbreite haben (z.b. ROM 14Bit / RAM 8Bit) Optimaler Ressourcen-Einsatz, preisgünstige Herstellung Nachteil Nicht für allgemeine Anwendung z.b. als Computer geeignet
 Optimaler Ressourcen-Einsatz, preisgünstige Herstellung Nachteil Nicht für allgemeine Anwendung z.b. als Computer geeignet")
4 PIC-Architektur Flash Programm-Speicher 14-Bit-Befehle EEPROM Daten-Speicher 8-Bit breit RAM Daten-Speicher 8-Bit breit Prozessorkern 14-Bit-Befehle (16F690) und 8-Bit-Daten Clock I/O- Ports Multiplexer Weitere Anschlüsse (z.b. analog) Anschlüsse (Pins) Funktion der Elemente Prozessorkern: Programm abarbeiten, Adressierung, einfache Rechen- und Logikfunktionen Programmspeicher: Vorhalten des Programms, nicht flüchtig RAM: Flüchtiger Datenspeicher, Vorhalten von Input-Daten, Zwischenergebnissen etc. EEPROM: Nicht-flüchtiger Datenspeicher, Vorhalten von z.b. Einstellungsdaten, die nicht beim Ausschalten des Gerätes verloren gehen sollen Clock: Bereitstellung des Arbeitstaktes, meistens extern beschaltet I/O-Ports: Anschlüsse, die als Output auf 0V (Low) oder 5V (High) gesetzt werden können oder deren Low/High-Zustand extern gesetzt und als Input abgefragt werden kann. Weitere Peripherie: Z.B. AD-Wandler, etc. Multiplexer: Typischerweise hat ein PIC genau so viele Anschlusspins, wie für die Beschaltung inkl. der I/O-Ports gebraucht werden. Zum Umschalten von Input- auf Outputfunktion benutzt man den Multiplexer. Sollen weitere Funktionen, z.b. durch spezielle Peripherie benutzt werden, so müssen Anschlüsse doppelt belegt werden. Durch den Multiplexer kann dann zwischen den Funktionen der Pins gewählt werden.

5 Anschlüsse des PIC16F690 VDD: Betriebsspannung (+5V), VSS: Masse (0V), MCLR: Reset, VPP: Programmierspannung Rxy: Ports - es gibt 3 Ports (A,B,C), von denen C 8 Anschlüsse/Bits hat, B hat 5 und A hat 6 Anschlüsse/Bits Die weiteren Anschlüsse sind momentan nicht interessant. Im Diagramm sieht man gut die Mehrfachbelegung, die durch den Multiplexer geregelt wird. Die Ports Die sog. Ports sind das Tor zur Welt für den PIC Physikalisch sind es die Anschlusspins, an denen entweder von aussen einer der beiden Zustände Low (0V) oder High (5V) angelegt werden kann, um dem Programm einen Zustand oder ein Ereignis mitzuteilen (Input), oder aber deren Low/High-Zustand vom Programm aus gesetzt werden kann, um der Aussenwelt etwas mitzuteilen (Output) Aus Sicht des Programms sind die Ports in Byte-Speicherstellen (Registern) repräsentiert. Ein Port kann daher aus 8 Anschlüssen bestehen und der 0/1-Wert des zugehörigen Bits entspricht dem Zustand des einzelnen Anschlusses. Da ein Anschluss nicht gleichzeitig In- und Output sein kann, wird die jeweilige Funktion in einem weiteren Register (TRIS) vom Programm gesetzt und dann kann das entsprechende Bit als Ausgang gesetzt oder als Input gelesen werden. Der PIC16F690 hat daher die Register PORTA, PORTB, PORTC und TRISA, TRISB, TRISC. Nur beim Port C sind alle 8 Anschlüsse physikalisch vorhanden und nutzbar!
, oder aber deren Low/High-Zustand vom Programm aus gesetzt werden kann, um der Aussenwelt etwas mitzuteilen (Output) Aus Sicht des Programms sind")
6 Beschaltung auf dem LPC-Board Der Programm-Speicher Programm Memory Organization The PIC16F690 has a 13-bit program counter capable of adressing an 8Kx14 program memory space. Only the first 4Kx14 (0000h-0FFFh) is physically implemented. Accessing a locatin above these boundaries will cause a wraparound. The reset vector is at 0000h and the interrupt vector is at 0004h (see Figure 2-2). Was bedeutet das?

7 Organisation des Programm-Speichers Der Programm Counter (PC) zeigt auf den aktuell auszuführenden Befehl. Er ist nichts anderes, als eine spezielle Speicherzelle, in der jeweils die Adresse des Befehls eingetragen ist und mit dem Programmablauf hochgezählt wird. Diese Speicherzelle ist 13 Bit breit, kann also maximal 8K (8191) Befehle adressieren. Jeder Befehl ist 14 Bit lang. Der PIC16F690 hat einen Speicher von 4K x 14 Bit, d.h. es können 4096 Befehle gespeichert werden. Zeigt der PC auf höhere Adressen, gibt es einen Wrap-Around, d.h. die Adresse 4097 zeigt wieder auf den ersten Befehl. Zum PC gehört noch ein Stack-Speicher. In ihm werden die Rücksprungadressen bei Programmverzweigungen (Unterprogrammaufrufe) abgelegt. Verzweigungsbefehle (CALL, GOTO) können natürlich auch nur 14 Bit lang sein. Da für den Befehlscode 3 Bit benötigt werden, können die Sprungadressen nur 11 Bit lang sein und damit ist die höchste Sprungadresse Der Programm-Speicher ist daher in 2 Bänke (Pages) à 2K x 14 Bit aufgeteilt. Zur Auswahl der Bänke muss vor einem Sprung ein spezielles Register (PCLATH) gesetzt oder gelöscht werden. Der Programmspeicher ist Flash-Memory, kann nur mit Programmiergerät ( Brenner, z.b. unserem PICkit 2) beschrieben/gelöscht werden. Datenspeicher (RAM)

8
9 Datenspeicher (RAM) - Zusammenfassung Organisation: Speicherzellen mit 1 Byte, 4 Bänke a 256 Byte Davon reserviert für Spezial-Register: Unterschiedliche Anzahl an Zellen in den vier Bänken. Einige Zellen spiegeln die Zellen anderer Bänke wieder (physikalich ist nur eine Zelle für mehrere Bänke vorhanden) Zusätzlich: Nicht alle Zellen sind physikalisch vorhanden Details im Data Sheet Das Ganze ist ziemlich unübersichtlich! Aber mit einer geeigneten Entwicklungsumgebung kann man sich das Leben erleichtern siehe MPLab Header-File für den PIC16F690

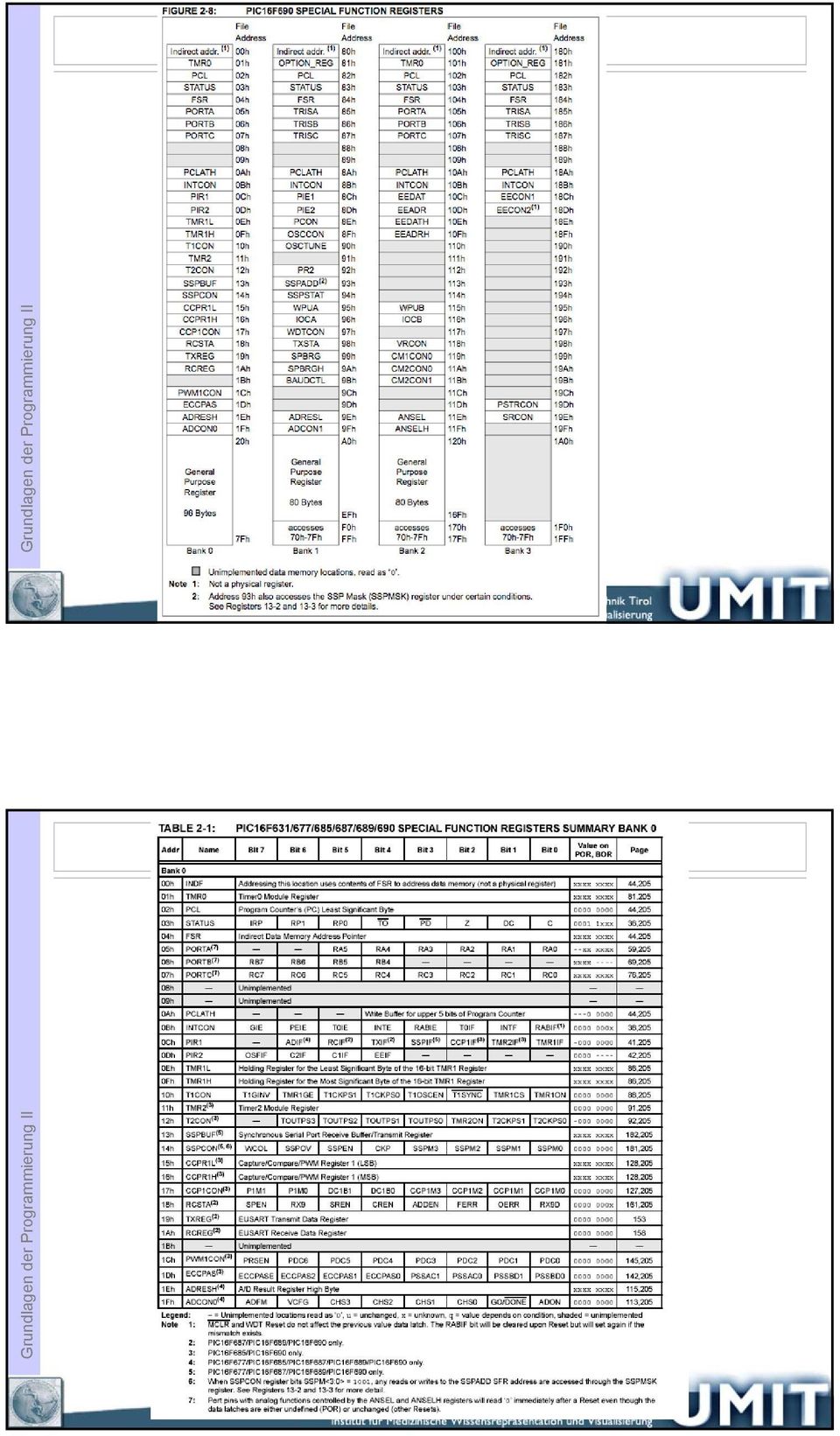
10 Datenspeicher (ROM) Der PIC16F690 hat zusätzlich noch einen EEPROM- Speicherbereich, in dem Daten dauerhaft auch nach dem Trennen von der Stromversorgung gehalten werden können. Es ist während der Laufzeit zu lesen und zu beschreiben! Der 16F690 hat 256 Byte EEPROM Speicher zur Verfügung Dieses Thema ist momentan nicht relevant, vielleicht kommen wir später darauf zurück. Spezial-Register Die Spezial-Register sind eng mit der Steuerung und der Programmierung des PICs verknüpft Zur Programmierung ist die Kenntnis und Benutzung der Register eine wichtige Voraussetzung! Sie sind im Data Sheet detailliert erklärt (s. Hausaufgabe) und im MPLab Header-File abgebildet (s. dort ). Dazu zunächst ein Blick ins Data Sheet für die ersten wichtigen Register: TRIS STATUS PORT

11 Der PIC16F690-Befehlssatz Alles klar? Der PIC16F690-Befehlssatz Im Data Sheet sind die Befehle natürlich detaillierter erklärt und es führt kein Weg drumherum, sich das alles einmal durchzulesen Ebenfalls eine gute Referenz findet sich auf der Website: Besser, als das trockene Lesen und eventuelle Auswendiglernen ist es, sich die Assembler-Sprache durch praktische Übungen zu erarbeiten!

12 Erste Programmierversuche Zum Nachlesen und Nachschlagen: Die MPLab-Hilfe (kurze Demo ) Diese Website: Eine ganz kleine Übung: 1. Wir analysieren das erste Beispiel Hello World der Microchip-Lessons, bis wir es vollständig verstehen. 2. Wir wandeln das Beispiel ab Hello World -Analyse Nachschauen von bsf in MPLab-Hilfe:

13 Hello World -Analyse bsf setzt also das Bit RP0 in STATUS auf 1 RP0 nachschauen im Header-File: Das Bit 5 im Register-Status nachschauen im Data Sheet: Hello World -Analyse

14 Hello World -Analyse Hello World -Analyse

15 Hello World -Analyse 1. Umschalten auf RAM-Page 1 2. PortC0 auf Output setzen 3. Umschalten auf RAM-Page 0 4. PortC0 auf 1 setzten (schaltet LED ein) 5. Endlosschleife Warum das Hin- und Herschalten zwischen Page 1 und Page 0?

16 Hello World erweitern Wir ändern das Programm so, dass die erste und die dritte LED angeschaltet werden! Das scheint einfach zu sein: Probieren Sie es aus und lassen sich überraschen Hausarbeit 1. Lesen und arbeiten Sie die hier nur im Überblick dargestellten Themen Spezialregister und Befehlssatz des PIC16F690 mit Hilfe des Data Sheets und der Website durch. 2. Versuchen Sie dann das Scheitern des vorhergehenden Versuchs zum Anschalten von zwei LEDs zu erklären und das Problem zu lösen. 3. Analysieren Sie nach dem hier gezeigten Schema die Microchip- Lesson 06 Debounce durch (das kann Ihnen eventuell auch bei Aufgabe 2 helfen) und spielen damit herum. Hinweis zur Einordnung: Wir werden ab dem nächstenmal schrittweise einen Byte-Taschenrechner entwickeln. Der erste Schritt dazu ist die Eingabe von Byte-Zahlen mit dem Taster dazu ist die Debounce-Lesson als Startpunkt sehr nützlich
 und spielen damit herum.")
17 Literatur Dokumentation zum PIC16F690 bei Microchip: me=en Hier insbesondere das Data Sheet zum PIC16F690: Sehr gute private Seite zum Thema:

Mikrocontroller Grundlagen. Markus Koch April 2011
 Mikrocontroller Grundlagen Markus Koch April 2011 Übersicht Was ist ein Mikrocontroller Aufbau (CPU/RAM/ROM/Takt/Peripherie) Unterschied zum Mikroprozessor Unterschiede der Controllerarten Unterschiede
Mikrocontroller Grundlagen Markus Koch April 2011 Übersicht Was ist ein Mikrocontroller Aufbau (CPU/RAM/ROM/Takt/Peripherie) Unterschied zum Mikroprozessor Unterschiede der Controllerarten Unterschiede
Microcontroller Kurs. 08.07.11 Microcontroller Kurs/Johannes Fuchs 1
 Microcontroller Kurs 08.07.11 Microcontroller Kurs/Johannes Fuchs 1 Was ist ein Microcontroller Wikipedia: A microcontroller (sometimes abbreviated µc, uc or MCU) is a small computer on a single integrated
Microcontroller Kurs 08.07.11 Microcontroller Kurs/Johannes Fuchs 1 Was ist ein Microcontroller Wikipedia: A microcontroller (sometimes abbreviated µc, uc or MCU) is a small computer on a single integrated
Facharbeit Informatik. Thema:
 Facharbeit Informatik Thema: Rechneraufbau Mit Locad 2002 1 Inhaltsangabe Inhalt: Seite: 1. Einleitung 3 2. Inbetriebnahme der Schaltung 3 3. Eingabe 4 4. CPU 5 5. RAM/HDD 8 6. Ausgabe 10 7. Auf einer
Facharbeit Informatik Thema: Rechneraufbau Mit Locad 2002 1 Inhaltsangabe Inhalt: Seite: 1. Einleitung 3 2. Inbetriebnahme der Schaltung 3 3. Eingabe 4 4. CPU 5 5. RAM/HDD 8 6. Ausgabe 10 7. Auf einer
PicKit 3. Programmierung mit dem USB-Programmer PICkit3 (Microchip) AB-2010-04
 AB-2010-04") PicKit 3 Programmierung mit dem USB-Programmer PICkit3 (Microchip) AB-2010-04 In diesem Dokument wird ein Umbau beschrieben. Für die Funktion des Umbaus gibt es keine Garantie. Für durch diesen Umbau entstandene
PicKit 3 Programmierung mit dem USB-Programmer PICkit3 (Microchip) AB-2010-04 In diesem Dokument wird ein Umbau beschrieben. Für die Funktion des Umbaus gibt es keine Garantie. Für durch diesen Umbau entstandene
Professionelle Seminare im Bereich MS-Office
 Der Name BEREICH.VERSCHIEBEN() ist etwas unglücklich gewählt. Man kann mit der Funktion Bereiche zwar verschieben, man kann Bereiche aber auch verkleinern oder vergrößern. Besser wäre es, die Funktion
Der Name BEREICH.VERSCHIEBEN() ist etwas unglücklich gewählt. Man kann mit der Funktion Bereiche zwar verschieben, man kann Bereiche aber auch verkleinern oder vergrößern. Besser wäre es, die Funktion
icloud nicht neu, aber doch irgendwie anders
 Kapitel 6 In diesem Kapitel zeigen wir Ihnen, welche Dienste die icloud beim Abgleich von Dateien und Informationen anbietet. Sie lernen icloud Drive kennen, den Fotostream, den icloud-schlüsselbund und
Kapitel 6 In diesem Kapitel zeigen wir Ihnen, welche Dienste die icloud beim Abgleich von Dateien und Informationen anbietet. Sie lernen icloud Drive kennen, den Fotostream, den icloud-schlüsselbund und
SICHERN DER FAVORITEN
 Seite 1 von 7 SICHERN DER FAVORITEN Eine Anleitung zum Sichern der eigenen Favoriten zur Verfügung gestellt durch: ZID Dezentrale Systeme März 2010 Seite 2 von 7 Für die Datensicherheit ist bekanntlich
Seite 1 von 7 SICHERN DER FAVORITEN Eine Anleitung zum Sichern der eigenen Favoriten zur Verfügung gestellt durch: ZID Dezentrale Systeme März 2010 Seite 2 von 7 Für die Datensicherheit ist bekanntlich
Lineargleichungssysteme: Additions-/ Subtraktionsverfahren
 Lineargleichungssysteme: Additions-/ Subtraktionsverfahren W. Kippels 22. Februar 2014 Inhaltsverzeichnis 1 Einleitung 2 2 Lineargleichungssysteme zweiten Grades 2 3 Lineargleichungssysteme höheren als
Lineargleichungssysteme: Additions-/ Subtraktionsverfahren W. Kippels 22. Februar 2014 Inhaltsverzeichnis 1 Einleitung 2 2 Lineargleichungssysteme zweiten Grades 2 3 Lineargleichungssysteme höheren als
Local Control Network
 Netzspannungsüberwachung (Stromausfallerkennung) Die Aufgabe Nach einem Stromausfall soll der Status von Aktoren oder Funktionen wieder so hergestellt werden, wie er vor dem Stromausfall war. Die Netzspannungsüberwachung
Netzspannungsüberwachung (Stromausfallerkennung) Die Aufgabe Nach einem Stromausfall soll der Status von Aktoren oder Funktionen wieder so hergestellt werden, wie er vor dem Stromausfall war. Die Netzspannungsüberwachung
Der Kalender im ipad
 Der Kalender im ipad Wir haben im ipad, dem ipod Touch und dem iphone, sowie auf dem PC in der Cloud einen Kalender. Die App ist voreingestellt, man braucht sie nicht laden. So macht es das ipad leicht,
Der Kalender im ipad Wir haben im ipad, dem ipod Touch und dem iphone, sowie auf dem PC in der Cloud einen Kalender. Die App ist voreingestellt, man braucht sie nicht laden. So macht es das ipad leicht,
mysql - Clients MySQL - Abfragen eine serverbasierenden Datenbank
 mysql - Clients MySQL - Abfragen eine serverbasierenden Datenbank In den ersten beiden Abschnitten (rbanken1.pdf und rbanken2.pdf) haben wir uns mit am Ende mysql beschäftigt und kennengelernt, wie man
mysql - Clients MySQL - Abfragen eine serverbasierenden Datenbank In den ersten beiden Abschnitten (rbanken1.pdf und rbanken2.pdf) haben wir uns mit am Ende mysql beschäftigt und kennengelernt, wie man
Anleitung über den Umgang mit Schildern
 Anleitung über den Umgang mit Schildern -Vorwort -Wo bekommt man Schilder? -Wo und wie speichert man die Schilder? -Wie füge ich die Schilder in meinen Track ein? -Welche Bauteile kann man noch für Schilder
Anleitung über den Umgang mit Schildern -Vorwort -Wo bekommt man Schilder? -Wo und wie speichert man die Schilder? -Wie füge ich die Schilder in meinen Track ein? -Welche Bauteile kann man noch für Schilder
Outlook. sysplus.ch outlook - mail-grundlagen Seite 1/8. Mail-Grundlagen. Posteingang
 sysplus.ch outlook - mail-grundlagen Seite 1/8 Outlook Mail-Grundlagen Posteingang Es gibt verschiedene Möglichkeiten, um zum Posteingang zu gelangen. Man kann links im Outlook-Fenster auf die Schaltfläche
sysplus.ch outlook - mail-grundlagen Seite 1/8 Outlook Mail-Grundlagen Posteingang Es gibt verschiedene Möglichkeiten, um zum Posteingang zu gelangen. Man kann links im Outlook-Fenster auf die Schaltfläche
Virtueller Seminarordner Anleitung für die Dozentinnen und Dozenten
 Virtueller Seminarordner Anleitung für die Dozentinnen und Dozenten In dem Virtuellen Seminarordner werden für die Teilnehmerinnen und Teilnehmer des Seminars alle für das Seminar wichtigen Informationen,
Virtueller Seminarordner Anleitung für die Dozentinnen und Dozenten In dem Virtuellen Seminarordner werden für die Teilnehmerinnen und Teilnehmer des Seminars alle für das Seminar wichtigen Informationen,
Stellen Sie bitte den Cursor in die Spalte B2 und rufen die Funktion Sverweis auf. Es öffnet sich folgendes Dialogfenster
 Es gibt in Excel unter anderem die so genannten Suchfunktionen / Matrixfunktionen Damit können Sie Werte innerhalb eines bestimmten Bereichs suchen. Als Beispiel möchte ich die Funktion Sverweis zeigen.
Es gibt in Excel unter anderem die so genannten Suchfunktionen / Matrixfunktionen Damit können Sie Werte innerhalb eines bestimmten Bereichs suchen. Als Beispiel möchte ich die Funktion Sverweis zeigen.
AutoCAD 2007 - Dienstprogramm zur Lizenzübertragung
 AutoCAD 2007 - Dienstprogramm zur Lizenzübertragung Problem: Um AutoCAD abwechselnd auf mehreren Rechnern einsetzen zu können konnte man bis AutoCAD 2000 einfach den Dongle umstecken. Seit AutoCAD 2000i
AutoCAD 2007 - Dienstprogramm zur Lizenzübertragung Problem: Um AutoCAD abwechselnd auf mehreren Rechnern einsetzen zu können konnte man bis AutoCAD 2000 einfach den Dongle umstecken. Seit AutoCAD 2000i
Benutzerkonto unter Windows 2000
 Jeder Benutzer, der an einem Windows 2000 PC arbeiten möchte, braucht dazu ein Benutzerkonto. Je nach Organisation des Netzwerkes, existiert dieses Benutzerkonto auf der lokalen Workstation oder im Active
Jeder Benutzer, der an einem Windows 2000 PC arbeiten möchte, braucht dazu ein Benutzerkonto. Je nach Organisation des Netzwerkes, existiert dieses Benutzerkonto auf der lokalen Workstation oder im Active
AGROPLUS Buchhaltung. Daten-Server und Sicherheitskopie. Version vom 21.10.2013b
 AGROPLUS Buchhaltung Daten-Server und Sicherheitskopie Version vom 21.10.2013b 3a) Der Daten-Server Modus und der Tresor Der Daten-Server ist eine Betriebsart welche dem Nutzer eine grosse Flexibilität
AGROPLUS Buchhaltung Daten-Server und Sicherheitskopie Version vom 21.10.2013b 3a) Der Daten-Server Modus und der Tresor Der Daten-Server ist eine Betriebsart welche dem Nutzer eine grosse Flexibilität
Leichte-Sprache-Bilder
 Leichte-Sprache-Bilder Reinhild Kassing Information - So geht es 1. Bilder gucken 2. anmelden für Probe-Bilder 3. Bilder bestellen 4. Rechnung bezahlen 5. Bilder runterladen 6. neue Bilder vorschlagen
Leichte-Sprache-Bilder Reinhild Kassing Information - So geht es 1. Bilder gucken 2. anmelden für Probe-Bilder 3. Bilder bestellen 4. Rechnung bezahlen 5. Bilder runterladen 6. neue Bilder vorschlagen
Partitionieren in Vista und Windows 7/8
 Partitionieren in Vista und Windows 7/8 Windows Vista und Windows 7 können von Haus aus Festplatten partitionieren. Doch die Funktion ist etwas schwer zu entdecken, denn sie heißt "Volume verkleinern".
Partitionieren in Vista und Windows 7/8 Windows Vista und Windows 7 können von Haus aus Festplatten partitionieren. Doch die Funktion ist etwas schwer zu entdecken, denn sie heißt "Volume verkleinern".
Datensicherung und Wiederherstellung
 Dokumentation Datensicherung und Wiederherstellung Versionsverzeichnis Version: Datum: Revisionsgrund: Version 1.0 Januar 2011 Erste Ausgabe www.babe-informatik.ch 1/7 Datensicherung von Voraussetzung
Dokumentation Datensicherung und Wiederherstellung Versionsverzeichnis Version: Datum: Revisionsgrund: Version 1.0 Januar 2011 Erste Ausgabe www.babe-informatik.ch 1/7 Datensicherung von Voraussetzung
Bedienungsanleitung Anlassteilnehmer (Vereinslisten)
") Bedienungsanleitung Anlassteilnehmer Dieses Programm ist speziell für Vereine entworfen. Es ist lizenzfrei verwendbar und gratis. Das Programm ist mit Excel 2010 erstellt worden und enthält VBA Programmierungen,
Bedienungsanleitung Anlassteilnehmer Dieses Programm ist speziell für Vereine entworfen. Es ist lizenzfrei verwendbar und gratis. Das Programm ist mit Excel 2010 erstellt worden und enthält VBA Programmierungen,
Was meinen die Leute eigentlich mit: Grexit?
 Was meinen die Leute eigentlich mit: Grexit? Grexit sind eigentlich 2 Wörter. 1. Griechenland 2. Exit Exit ist ein englisches Wort. Es bedeutet: Ausgang. Aber was haben diese 2 Sachen mit-einander zu tun?
Was meinen die Leute eigentlich mit: Grexit? Grexit sind eigentlich 2 Wörter. 1. Griechenland 2. Exit Exit ist ein englisches Wort. Es bedeutet: Ausgang. Aber was haben diese 2 Sachen mit-einander zu tun?
PICkit 2 / 3. Programmierung mit dem USB-Programmer PICkit2 bzw. PICkit3 (Microchip) AB-2011-01
 AB-2011-01") PICkit 2 / 3 Programmierung mit dem USB-Programmer PICkit2 bzw. PICkit3 (Microchip) AB-2011-01 In diesem Dokument wird ein Umbau beschrieben. Für die Funktion des Umbaus gibt es keine Garantie. Für durch
PICkit 2 / 3 Programmierung mit dem USB-Programmer PICkit2 bzw. PICkit3 (Microchip) AB-2011-01 In diesem Dokument wird ein Umbau beschrieben. Für die Funktion des Umbaus gibt es keine Garantie. Für durch
Speichern. Speichern unter
 Speichern Speichern unter Speichern Auf einem PC wird ständig gespeichert. Von der Festplatte in den Arbeitspeicher und zurück Beim Download Beim Kopieren Beim Aufruf eines Programms Beim Löschen Beim
Speichern Speichern unter Speichern Auf einem PC wird ständig gespeichert. Von der Festplatte in den Arbeitspeicher und zurück Beim Download Beim Kopieren Beim Aufruf eines Programms Beim Löschen Beim
Lehrer: Einschreibemethoden
 Lehrer: Einschreibemethoden Einschreibemethoden Für die Einschreibung in Ihren Kurs gibt es unterschiedliche Methoden. Sie können die Schüler über die Liste eingeschriebene Nutzer Ihrem Kurs zuweisen oder
Lehrer: Einschreibemethoden Einschreibemethoden Für die Einschreibung in Ihren Kurs gibt es unterschiedliche Methoden. Sie können die Schüler über die Liste eingeschriebene Nutzer Ihrem Kurs zuweisen oder
Bedienungsanleitung für den Online-Shop
 Hier sind die Produktgruppen zu finden. Zur Produktgruppe gibt es eine Besonderheit: - Seite 1 von 18 - Zuerst wählen Sie einen Drucker-Hersteller aus. Dann wählen Sie das entsprechende Drucker- Modell
Hier sind die Produktgruppen zu finden. Zur Produktgruppe gibt es eine Besonderheit: - Seite 1 von 18 - Zuerst wählen Sie einen Drucker-Hersteller aus. Dann wählen Sie das entsprechende Drucker- Modell
Handbuch. NAFI Online-Spezial. Kunden- / Datenverwaltung. 1. Auflage. (Stand: 24.09.2014)
") Handbuch NAFI Online-Spezial 1. Auflage (Stand: 24.09.2014) Copyright 2016 by NAFI GmbH Unerlaubte Vervielfältigungen sind untersagt! Inhaltsangabe Einleitung... 3 Kundenauswahl... 3 Kunde hinzufügen...
Handbuch NAFI Online-Spezial 1. Auflage (Stand: 24.09.2014) Copyright 2016 by NAFI GmbH Unerlaubte Vervielfältigungen sind untersagt! Inhaltsangabe Einleitung... 3 Kundenauswahl... 3 Kunde hinzufügen...
Datensicherung. Beschreibung der Datensicherung
 Datensicherung Mit dem Datensicherungsprogramm können Sie Ihre persönlichen Daten problemlos Sichern. Es ist möglich eine komplette Datensicherung durchzuführen, aber auch nur die neuen und geänderten
Datensicherung Mit dem Datensicherungsprogramm können Sie Ihre persönlichen Daten problemlos Sichern. Es ist möglich eine komplette Datensicherung durchzuführen, aber auch nur die neuen und geänderten
RS-Flip Flop, D-Flip Flop, J-K-Flip Flop, Zählschaltungen
 Elektronik Praktikum / Digitaler Teil Name: Jens Wiechula, Philipp Fischer Leitung: Prof. Dr. U. Lynen Protokoll: Philipp Fischer Versuch: 3 Datum: 24.06.01 RS-Flip Flop, D-Flip Flop, J-K-Flip Flop, Zählschaltungen
Elektronik Praktikum / Digitaler Teil Name: Jens Wiechula, Philipp Fischer Leitung: Prof. Dr. U. Lynen Protokoll: Philipp Fischer Versuch: 3 Datum: 24.06.01 RS-Flip Flop, D-Flip Flop, J-K-Flip Flop, Zählschaltungen
40-Tage-Wunder- Kurs. Umarme, was Du nicht ändern kannst.
 40-Tage-Wunder- Kurs Umarme, was Du nicht ändern kannst. Das sagt Wikipedia: Als Wunder (griechisch thauma) gilt umgangssprachlich ein Ereignis, dessen Zustandekommen man sich nicht erklären kann, so dass
40-Tage-Wunder- Kurs Umarme, was Du nicht ändern kannst. Das sagt Wikipedia: Als Wunder (griechisch thauma) gilt umgangssprachlich ein Ereignis, dessen Zustandekommen man sich nicht erklären kann, so dass
Mediumwechsel - VR-NetWorld Software
 Mediumwechsel - VR-NetWorld Software Die personalisierte VR-NetWorld-Card wird mit einem festen Laufzeitende ausgeliefert. Am Ende der Laufzeit müssen Sie die bestehende VR-NetWorld-Card gegen eine neue
Mediumwechsel - VR-NetWorld Software Die personalisierte VR-NetWorld-Card wird mit einem festen Laufzeitende ausgeliefert. Am Ende der Laufzeit müssen Sie die bestehende VR-NetWorld-Card gegen eine neue
Festplatte defragmentieren Internetspuren und temporäre Dateien löschen
 Festplatte defragmentieren Internetspuren und temporäre Dateien löschen Wer viel mit dem Computer arbeitet kennt das Gefühl, dass die Maschine immer langsamer arbeitet und immer mehr Zeit braucht um aufzustarten.
Festplatte defragmentieren Internetspuren und temporäre Dateien löschen Wer viel mit dem Computer arbeitet kennt das Gefühl, dass die Maschine immer langsamer arbeitet und immer mehr Zeit braucht um aufzustarten.
Dokumentation für die software für zahnärzte der procedia GmbH Onlinedokumentation
 Dokumentation für die software für zahnärzte der procedia GmbH Onlinedokumentation (Bei Abweichungen, die bspw. durch technischen Fortschritt entstehen können, ziehen Sie bitte immer das aktuelle Handbuch
Dokumentation für die software für zahnärzte der procedia GmbH Onlinedokumentation (Bei Abweichungen, die bspw. durch technischen Fortschritt entstehen können, ziehen Sie bitte immer das aktuelle Handbuch
www.computeria-olten.ch Monatstreff für Menschen ab 50 Temporäre Dateien / Browserverlauf löschen / Cookies
 www.computeria-olten.ch Monatstreff für Menschen ab 50 Merkblatt 42 Temporäre Dateien / Browserverlauf löschen / Cookies Im Internet-Explorer Extras / Browserverlauf löschen Jetzt entscheiden, was man
www.computeria-olten.ch Monatstreff für Menschen ab 50 Merkblatt 42 Temporäre Dateien / Browserverlauf löschen / Cookies Im Internet-Explorer Extras / Browserverlauf löschen Jetzt entscheiden, was man
Anwendungsbeispiele Buchhaltung
 Rechnungen erstellen mit Webling Webling ist ein Produkt der Firma: Inhaltsverzeichnis 1 Rechnungen erstellen mit Webling 1.1 Rechnung erstellen und ausdrucken 1.2 Rechnung mit Einzahlungsschein erstellen
Rechnungen erstellen mit Webling Webling ist ein Produkt der Firma: Inhaltsverzeichnis 1 Rechnungen erstellen mit Webling 1.1 Rechnung erstellen und ausdrucken 1.2 Rechnung mit Einzahlungsschein erstellen
Benutzerhandbuch. Leitfaden zur Benutzung der Anwendung für sicheren Dateitransfer.
 Benutzerhandbuch Leitfaden zur Benutzung der Anwendung für sicheren Dateitransfer. 1 Startseite Wenn Sie die Anwendung starten, können Sie zwischen zwei Möglichkeiten wählen 1) Sie können eine Datei für
Benutzerhandbuch Leitfaden zur Benutzung der Anwendung für sicheren Dateitransfer. 1 Startseite Wenn Sie die Anwendung starten, können Sie zwischen zwei Möglichkeiten wählen 1) Sie können eine Datei für
Zimmertypen. Zimmertypen anlegen
 Zimmertypen anlegen Hier legen Sie Ihre Zimmer an, damit sie auf der Homepage dargestellt werden und online buchbar gemacht werden können. Wobei wir ausdrücklich darauf hinweisen möchten, dass es ganz
Zimmertypen anlegen Hier legen Sie Ihre Zimmer an, damit sie auf der Homepage dargestellt werden und online buchbar gemacht werden können. Wobei wir ausdrücklich darauf hinweisen möchten, dass es ganz
SharePoint Demonstration
 SharePoint Demonstration Was zeigt die Demonstration? Diese Demonstration soll den modernen Zugriff auf Daten und Informationen veranschaulichen und zeigen welche Vorteile sich dadurch in der Zusammenarbeit
SharePoint Demonstration Was zeigt die Demonstration? Diese Demonstration soll den modernen Zugriff auf Daten und Informationen veranschaulichen und zeigen welche Vorteile sich dadurch in der Zusammenarbeit
Er musste so eingerichtet werden, dass das D-Laufwerk auf das E-Laufwerk gespiegelt
 Inhaltsverzeichnis Aufgabe... 1 Allgemein... 1 Active Directory... 1 Konfiguration... 2 Benutzer erstellen... 3 Eigenes Verzeichnis erstellen... 3 Benutzerkonto erstellen... 3 Profil einrichten... 5 Berechtigungen
Inhaltsverzeichnis Aufgabe... 1 Allgemein... 1 Active Directory... 1 Konfiguration... 2 Benutzer erstellen... 3 Eigenes Verzeichnis erstellen... 3 Benutzerkonto erstellen... 3 Profil einrichten... 5 Berechtigungen
Lizenzen auschecken. Was ist zu tun?
 Use case Lizenzen auschecken Ihr Unternehmen hat eine Netzwerk-Commuterlizenz mit beispielsweise 4 Lizenzen. Am Freitag wollen Sie Ihren Laptop mit nach Hause nehmen, um dort am Wochenende weiter zu arbeiten.
Use case Lizenzen auschecken Ihr Unternehmen hat eine Netzwerk-Commuterlizenz mit beispielsweise 4 Lizenzen. Am Freitag wollen Sie Ihren Laptop mit nach Hause nehmen, um dort am Wochenende weiter zu arbeiten.
Herzlich Willkommen bei der BITel!
 Herzlich Willkommen bei der BITel! Damit Sie auch unterwegs mit dem iphone Ihre E-Mails abrufen können, zeigen wir Ihnen Schritt für Schritt wie Sie Ihr BITel-Postfach im iphone einrichten. Los geht's:
Herzlich Willkommen bei der BITel! Damit Sie auch unterwegs mit dem iphone Ihre E-Mails abrufen können, zeigen wir Ihnen Schritt für Schritt wie Sie Ihr BITel-Postfach im iphone einrichten. Los geht's:
Wie halte ich Ordnung auf meiner Festplatte?
 Wie halte ich Ordnung auf meiner Festplatte? Was hältst du von folgender Ordnung? Du hast zu Hause einen Schrank. Alles was dir im Wege ist, Zeitungen, Briefe, schmutzige Wäsche, Essensreste, Küchenabfälle,
Wie halte ich Ordnung auf meiner Festplatte? Was hältst du von folgender Ordnung? Du hast zu Hause einen Schrank. Alles was dir im Wege ist, Zeitungen, Briefe, schmutzige Wäsche, Essensreste, Küchenabfälle,
Informationsblatt Induktionsbeweis
 Sommer 015 Informationsblatt Induktionsbeweis 31. März 015 Motivation Die vollständige Induktion ist ein wichtiges Beweisverfahren in der Informatik. Sie wird häufig dazu gebraucht, um mathematische Formeln
Sommer 015 Informationsblatt Induktionsbeweis 31. März 015 Motivation Die vollständige Induktion ist ein wichtiges Beweisverfahren in der Informatik. Sie wird häufig dazu gebraucht, um mathematische Formeln
Suche schlecht beschriftete Bilder mit Eigenen Abfragen
 Suche schlecht beschriftete Bilder mit Eigenen Abfragen Ist die Bilderdatenbank über einen längeren Zeitraum in Benutzung, so steigt die Wahrscheinlichkeit für schlecht beschriftete Bilder 1. Insbesondere
Suche schlecht beschriftete Bilder mit Eigenen Abfragen Ist die Bilderdatenbank über einen längeren Zeitraum in Benutzung, so steigt die Wahrscheinlichkeit für schlecht beschriftete Bilder 1. Insbesondere
Wenn keine Verbindung zwischen den Computern besteht, dann bist du offline.
 online Das ist ein englisches Wort und bedeutet in der Leitung". Wenn du mit einem Freund oder einer Freundin telefonierst, bist du online. Wenn sich 2 Computer dein Computer und einer in Amerika miteinander
online Das ist ein englisches Wort und bedeutet in der Leitung". Wenn du mit einem Freund oder einer Freundin telefonierst, bist du online. Wenn sich 2 Computer dein Computer und einer in Amerika miteinander
Die Beschreibung bezieht sich auf die Version Dreamweaver 4.0. In der Version MX ist die Sitedefinition leicht geändert worden.
 In einer Website haben Seiten oft das gleiche Layout. Speziell beim Einsatz von Tabellen, in denen die Navigation auf der linken oder rechten Seite, oben oder unten eingesetzt wird. Diese Anteile der Website
In einer Website haben Seiten oft das gleiche Layout. Speziell beim Einsatz von Tabellen, in denen die Navigation auf der linken oder rechten Seite, oben oder unten eingesetzt wird. Diese Anteile der Website
Stepperfocuser 2.0 mit Bootloader
 Stepperfocuser 2.0 mit Bootloader Info Für den Stepperfocuser 2.0 gibt es einen Bootloader. Dieser ermöglicht es, die Firmware zu aktualisieren ohne dass man ein spezielles Programmiergerät benötigt. Die
Stepperfocuser 2.0 mit Bootloader Info Für den Stepperfocuser 2.0 gibt es einen Bootloader. Dieser ermöglicht es, die Firmware zu aktualisieren ohne dass man ein spezielles Programmiergerät benötigt. Die
1 Aufgaben zu Wie funktioniert ein Computer?
 71 1 Aufgaben zu Wie funktioniert ein Computer? Netzteil a) Welche Spannungen werden von PC-Netzteilen bereitgestellt? 3.3 V, 5 V, 12 V, -5 V, -12 V. b) Warum können PC-Netzteile hohe Leistungen liefern,
71 1 Aufgaben zu Wie funktioniert ein Computer? Netzteil a) Welche Spannungen werden von PC-Netzteilen bereitgestellt? 3.3 V, 5 V, 12 V, -5 V, -12 V. b) Warum können PC-Netzteile hohe Leistungen liefern,
Was ist Sozial-Raum-Orientierung?
 Was ist Sozial-Raum-Orientierung? Dr. Wolfgang Hinte Universität Duisburg-Essen Institut für Stadt-Entwicklung und Sozial-Raum-Orientierte Arbeit Das ist eine Zusammen-Fassung des Vortrages: Sozialräume
Was ist Sozial-Raum-Orientierung? Dr. Wolfgang Hinte Universität Duisburg-Essen Institut für Stadt-Entwicklung und Sozial-Raum-Orientierte Arbeit Das ist eine Zusammen-Fassung des Vortrages: Sozialräume
ARCO Software - Anleitung zur Umstellung der MWSt
 ARCO Software - Anleitung zur Umstellung der MWSt Wieder einmal beschert uns die Bundesverwaltung auf Ende Jahr mit zusätzlicher Arbeit, statt mit den immer wieder versprochenen Erleichterungen für KMU.
ARCO Software - Anleitung zur Umstellung der MWSt Wieder einmal beschert uns die Bundesverwaltung auf Ende Jahr mit zusätzlicher Arbeit, statt mit den immer wieder versprochenen Erleichterungen für KMU.
Zahlenwinkel: Forscherkarte 1. alleine. Zahlenwinkel: Forschertipp 1
 Zahlenwinkel: Forscherkarte 1 alleine Tipp 1 Lege die Ziffern von 1 bis 9 so in den Zahlenwinkel, dass jeder Arm des Zahlenwinkels zusammengezählt das gleiche Ergebnis ergibt! Finde möglichst viele verschiedene
Zahlenwinkel: Forscherkarte 1 alleine Tipp 1 Lege die Ziffern von 1 bis 9 so in den Zahlenwinkel, dass jeder Arm des Zahlenwinkels zusammengezählt das gleiche Ergebnis ergibt! Finde möglichst viele verschiedene
Überprüfung der digital signierten E-Rechnung
 Überprüfung der digital signierten E-Rechnung Aufgrund des BMF-Erlasses vom Juli 2005 (BMF-010219/0183-IV/9/2005) gelten ab 01.01.2006 nur noch jene elektronischen Rechnungen als vorsteuerabzugspflichtig,
Überprüfung der digital signierten E-Rechnung Aufgrund des BMF-Erlasses vom Juli 2005 (BMF-010219/0183-IV/9/2005) gelten ab 01.01.2006 nur noch jene elektronischen Rechnungen als vorsteuerabzugspflichtig,
Advoware mit VPN Zugriff lokaler Server / PC auf externe Datenbank
 Advoware mit VPN Zugriff lokaler Server / PC auf externe Datenbank Die Entscheidung Advoware über VPN direkt auf dem lokalen PC / Netzwerk mit Zugriff auf die Datenbank des zentralen Servers am anderen
Advoware mit VPN Zugriff lokaler Server / PC auf externe Datenbank Die Entscheidung Advoware über VPN direkt auf dem lokalen PC / Netzwerk mit Zugriff auf die Datenbank des zentralen Servers am anderen
Von Bits, Bytes und Raid
 Von Bits, Bytes und Raid Eine Schnuppervorlesung zum Kennenlernen eines Datenspeichers um Bits und Bytes zu unterscheiden um Raid-Festplattensysteme zu verstehen Inhalt Speicherzellen sind elektronische
Von Bits, Bytes und Raid Eine Schnuppervorlesung zum Kennenlernen eines Datenspeichers um Bits und Bytes zu unterscheiden um Raid-Festplattensysteme zu verstehen Inhalt Speicherzellen sind elektronische
Outlook-Daten komplett sichern
 Outlook-Daten komplett sichern Komplettsicherung beinhaltet alle Daten wie auch Kontakte und Kalender eines Benutzers. Zu diesem Zweck öffnen wir OUTLOOK und wählen Datei -> Optionen und weiter geht es
Outlook-Daten komplett sichern Komplettsicherung beinhaltet alle Daten wie auch Kontakte und Kalender eines Benutzers. Zu diesem Zweck öffnen wir OUTLOOK und wählen Datei -> Optionen und weiter geht es
easyident Türöffner easyident Türöffner Art. Nr. FS-0007 FS Fertigungsservice
 easyident Türöffner Art. Nr. FS-0007 Wir freuen uns, das sie sich für unser Produkt easyident Türöffner, mit Transponder Technologie entschieden haben. Easyident Türöffner ist für Unterputzmontage in 55mm
easyident Türöffner Art. Nr. FS-0007 Wir freuen uns, das sie sich für unser Produkt easyident Türöffner, mit Transponder Technologie entschieden haben. Easyident Türöffner ist für Unterputzmontage in 55mm
Wie bekomme ich eine E-Mail Adresse. Eva Lackinger, Rene Morwind Margot Campbell
 Wie bekomme ich eine E-Mail Adresse Eva Lackinger, Rene Morwind Margot Campbell Programm Was ist eine E- Mail? Informationen zu E-Mail Adresse Wir machen eine E-Mail Adresse Kurze Pause Wir schauen uns
Wie bekomme ich eine E-Mail Adresse Eva Lackinger, Rene Morwind Margot Campbell Programm Was ist eine E- Mail? Informationen zu E-Mail Adresse Wir machen eine E-Mail Adresse Kurze Pause Wir schauen uns
ACDSee Pro 2. ACDSee Pro 2 Tutorials: Übertragung von Fotos (+ Datenbank) auf einen anderen Computer. Über Metadaten und die Datenbank
 auf einen anderen Computer. Über Metadaten und die Datenbank") Tutorials: Übertragung von Fotos (+ ) auf einen anderen Computer Export der In dieser Lektion erfahren Sie, wie Sie am effektivsten Fotos von einem Computer auf einen anderen übertragen. Wenn Sie Ihre
Tutorials: Übertragung von Fotos (+ ) auf einen anderen Computer Export der In dieser Lektion erfahren Sie, wie Sie am effektivsten Fotos von einem Computer auf einen anderen übertragen. Wenn Sie Ihre
Lassen Sie sich dieses sensationelle Projekt Schritt für Schritt erklären:
 Lassen Sie sich dieses sensationelle Projekt Schritt für Schritt erklären: Gold Line International Ltd. Seite 1 STELLEN SIE SICH VOR: Jeder Mensch auf der Erde gibt Ihnen 1,- Dollar Das wäre nicht schwer
Lassen Sie sich dieses sensationelle Projekt Schritt für Schritt erklären: Gold Line International Ltd. Seite 1 STELLEN SIE SICH VOR: Jeder Mensch auf der Erde gibt Ihnen 1,- Dollar Das wäre nicht schwer
Programme im Griff Was bringt Ihnen dieses Kapitel?
 3-8272-5838-3 Windows Me 2 Programme im Griff Was bringt Ihnen dieses Kapitel? Wenn Sie unter Windows arbeiten (z.b. einen Brief schreiben, etwas ausdrucken oder ein Fenster öffnen), steckt letztendlich
3-8272-5838-3 Windows Me 2 Programme im Griff Was bringt Ihnen dieses Kapitel? Wenn Sie unter Windows arbeiten (z.b. einen Brief schreiben, etwas ausdrucken oder ein Fenster öffnen), steckt letztendlich
Einführung in die Welt der Microcontroller
 Übersicht Microcontroller Schaltungen Sonstiges Einführung in die Welt der Microcontroller Übersicht Microcontroller Schaltungen Sonstiges Inhaltsverzeichnis 1 Übersicht Möglichkeiten Einsatz 2 Microcontroller
Übersicht Microcontroller Schaltungen Sonstiges Einführung in die Welt der Microcontroller Übersicht Microcontroller Schaltungen Sonstiges Inhaltsverzeichnis 1 Übersicht Möglichkeiten Einsatz 2 Microcontroller
www.be-forever.de EINE PLATTFORM
 Online-Shop-Portal www.be-forever.de EINE PLATTFORM für Ihre Online-Aktivitäten Vertriebspartner-Shop Online-Shop Basic Online-Shop Pro Vertriebspartner-Shop Bisher gab es den Online-Shop, in dem Sie Ihre
Online-Shop-Portal www.be-forever.de EINE PLATTFORM für Ihre Online-Aktivitäten Vertriebspartner-Shop Online-Shop Basic Online-Shop Pro Vertriebspartner-Shop Bisher gab es den Online-Shop, in dem Sie Ihre
Eigene Dokumente, Fotos, Bilder etc. sichern
 Eigene Dokumente, Fotos, Bilder etc. sichern Solange alles am PC rund läuft, macht man sich keine Gedanken darüber, dass bei einem Computer auch mal ein technischer Defekt auftreten könnte. Aber Grundsätzliches
Eigene Dokumente, Fotos, Bilder etc. sichern Solange alles am PC rund läuft, macht man sich keine Gedanken darüber, dass bei einem Computer auch mal ein technischer Defekt auftreten könnte. Aber Grundsätzliches
Local Control Network
 Lichtszenen Sie ermöglichen per einfachen Tastendruck die Lichtstimmung auszuwählen, z.b. im Wohnzimmer entweder Putzlicht (alle 100%), TV, Lesen oder Unter uns (alle 0%). Oder im Kino, in der Kirche oder
Lichtszenen Sie ermöglichen per einfachen Tastendruck die Lichtstimmung auszuwählen, z.b. im Wohnzimmer entweder Putzlicht (alle 100%), TV, Lesen oder Unter uns (alle 0%). Oder im Kino, in der Kirche oder
Mediumwechsel - VR-NetWorld Software
 Mediumwechsel - VR-NetWorld Software Die personalisierte VR-BankCard mit HBCI wird mit einem festen Laufzeitende ausgeliefert. Am Ende der Laufzeit müssen Sie die bestehende VR-BankCard gegen eine neue
Mediumwechsel - VR-NetWorld Software Die personalisierte VR-BankCard mit HBCI wird mit einem festen Laufzeitende ausgeliefert. Am Ende der Laufzeit müssen Sie die bestehende VR-BankCard gegen eine neue
Buddy - Algorithmus Handbuch für Endnutzer Stand 02.08.2005
 Buddy - Algorithmus Handbuch für Endnutzer Stand 02.08.2005 1. Vorwort 1 2. Systemvoraussetzungen 2 3. Programmarten 2 4. Sicherheit der Endnutzer 2 5. Handhabung 3 5.1 allgemeine Programmübersicht 3 5.2
Buddy - Algorithmus Handbuch für Endnutzer Stand 02.08.2005 1. Vorwort 1 2. Systemvoraussetzungen 2 3. Programmarten 2 4. Sicherheit der Endnutzer 2 5. Handhabung 3 5.1 allgemeine Programmübersicht 3 5.2
Studieren- Erklärungen und Tipps
 Studieren- Erklärungen und Tipps Es gibt Berufe, die man nicht lernen kann, sondern für die man ein Studium machen muss. Das ist zum Beispiel so wenn man Arzt oder Lehrer werden möchte. Hat ihr Kind das
Studieren- Erklärungen und Tipps Es gibt Berufe, die man nicht lernen kann, sondern für die man ein Studium machen muss. Das ist zum Beispiel so wenn man Arzt oder Lehrer werden möchte. Hat ihr Kind das
Was man mit dem Computer alles machen kann
 Was man mit dem Computer alles machen kann Wie komme ich ins Internet? Wenn Sie einen Computer zu Hause haben. Wenn Sie das Internet benutzen möchten, dann brauchen Sie ein eigenes Programm dafür. Dieses
Was man mit dem Computer alles machen kann Wie komme ich ins Internet? Wenn Sie einen Computer zu Hause haben. Wenn Sie das Internet benutzen möchten, dann brauchen Sie ein eigenes Programm dafür. Dieses
Sowohl die Malstreifen als auch die Neperschen Streifen können auch in anderen Stellenwertsystemen verwendet werden.
 Multiplikation Die schriftliche Multiplikation ist etwas schwieriger als die Addition. Zum einen setzt sie das kleine Einmaleins voraus, zum anderen sind die Überträge, die zu merken sind und häufig in
Multiplikation Die schriftliche Multiplikation ist etwas schwieriger als die Addition. Zum einen setzt sie das kleine Einmaleins voraus, zum anderen sind die Überträge, die zu merken sind und häufig in
In diesem Tutorial lernen Sie, wie Sie einen Termin erfassen und verschiedene Einstellungen zu einem Termin vornehmen können.
 Tutorial: Wie erfasse ich einen Termin? In diesem Tutorial lernen Sie, wie Sie einen Termin erfassen und verschiedene Einstellungen zu einem Termin vornehmen können. Neben den allgemeinen Angaben zu einem
Tutorial: Wie erfasse ich einen Termin? In diesem Tutorial lernen Sie, wie Sie einen Termin erfassen und verschiedene Einstellungen zu einem Termin vornehmen können. Neben den allgemeinen Angaben zu einem
mit dem TeXnicCenter von Andreas Both
 LaTeX mit dem TeXnicCenter Seite 1 von 9 mit dem TeXnicCenter von Andreas Both Diese Dokument soll den Schnelleinstieg von der Installation bis zum ersten LaTeX-Dokument in sehr kurzen (5) Schritten und
LaTeX mit dem TeXnicCenter Seite 1 von 9 mit dem TeXnicCenter von Andreas Both Diese Dokument soll den Schnelleinstieg von der Installation bis zum ersten LaTeX-Dokument in sehr kurzen (5) Schritten und
Grundlagen der Informatik
 Mag. Christian Gürtler Programmierung Grundlagen der Informatik 2011 Inhaltsverzeichnis I. Allgemeines 3 1. Zahlensysteme 4 1.1. ganze Zahlen...................................... 4 1.1.1. Umrechnungen.................................
Mag. Christian Gürtler Programmierung Grundlagen der Informatik 2011 Inhaltsverzeichnis I. Allgemeines 3 1. Zahlensysteme 4 1.1. ganze Zahlen...................................... 4 1.1.1. Umrechnungen.................................
Urlaubsregel in David
 Urlaubsregel in David Inhaltsverzeichnis KlickDown Beitrag von Tobit...3 Präambel...3 Benachrichtigung externer Absender...3 Erstellen oder Anpassen des Anworttextes...3 Erstellen oder Anpassen der Auto-Reply-Regel...5
Urlaubsregel in David Inhaltsverzeichnis KlickDown Beitrag von Tobit...3 Präambel...3 Benachrichtigung externer Absender...3 Erstellen oder Anpassen des Anworttextes...3 Erstellen oder Anpassen der Auto-Reply-Regel...5
Sich einen eigenen Blog anzulegen, ist gar nicht so schwer. Es gibt verschiedene Anbieter. www.blogger.com ist einer davon.
 www.blogger.com Sich einen eigenen Blog anzulegen, ist gar nicht so schwer. Es gibt verschiedene Anbieter. www.blogger.com ist einer davon. Sie müssen sich dort nur ein Konto anlegen. Dafür gehen Sie auf
www.blogger.com Sich einen eigenen Blog anzulegen, ist gar nicht so schwer. Es gibt verschiedene Anbieter. www.blogger.com ist einer davon. Sie müssen sich dort nur ein Konto anlegen. Dafür gehen Sie auf
Anwendungsbeispiele. Neuerungen in den E-Mails. Webling ist ein Produkt der Firma:
 Anwendungsbeispiele Neuerungen in den E-Mails Webling ist ein Produkt der Firma: Inhaltsverzeichnis 1 Neuerungen in den E- Mails 2 Was gibt es neues? 3 E- Mail Designs 4 Bilder in E- Mails einfügen 1 Neuerungen
Anwendungsbeispiele Neuerungen in den E-Mails Webling ist ein Produkt der Firma: Inhaltsverzeichnis 1 Neuerungen in den E- Mails 2 Was gibt es neues? 3 E- Mail Designs 4 Bilder in E- Mails einfügen 1 Neuerungen
Fehler und Probleme bei Auswahl und Installation eines Dokumentenmanagement Systems
 Fehler und Probleme bei Auswahl und Installation eines Dokumentenmanagement Systems Name: Bruno Handler Funktion: Marketing/Vertrieb Organisation: AXAVIA Software GmbH Liebe Leserinnen und liebe Leser,
Fehler und Probleme bei Auswahl und Installation eines Dokumentenmanagement Systems Name: Bruno Handler Funktion: Marketing/Vertrieb Organisation: AXAVIA Software GmbH Liebe Leserinnen und liebe Leser,
2. Negative Dualzahlen darstellen
 2.1 Subtraktion von Dualzahlen 2.1.1 Direkte Subtraktion (Tafelrechnung) siehe ARCOR T0IF Nachteil dieser Methode: Diese Form der Subtraktion kann nur sehr schwer von einer Elektronik (CPU) durchgeführt
2.1 Subtraktion von Dualzahlen 2.1.1 Direkte Subtraktion (Tafelrechnung) siehe ARCOR T0IF Nachteil dieser Methode: Diese Form der Subtraktion kann nur sehr schwer von einer Elektronik (CPU) durchgeführt
ICS-Addin. Benutzerhandbuch. Version: 1.0
 ICS-Addin Benutzerhandbuch Version: 1.0 SecureGUARD GmbH, 2011 Inhalt: 1. Was ist ICS?... 3 2. ICS-Addin im Dashboard... 3 3. ICS einrichten... 4 4. ICS deaktivieren... 5 5. Adapter-Details am Server speichern...
ICS-Addin Benutzerhandbuch Version: 1.0 SecureGUARD GmbH, 2011 Inhalt: 1. Was ist ICS?... 3 2. ICS-Addin im Dashboard... 3 3. ICS einrichten... 4 4. ICS deaktivieren... 5 5. Adapter-Details am Server speichern...
Local Control Network Technische Dokumentation
 Steuerung von Hifi-Anlagen mit der LCN-GVS Häufig wird der Wunsch geäußert, eine Hi-Fi-Anlage in die Steuerung der LCN-GVS einzubinden. Auch das ist realisierbar. Für die hier gezeigte Lösung müssen wenige
Steuerung von Hifi-Anlagen mit der LCN-GVS Häufig wird der Wunsch geäußert, eine Hi-Fi-Anlage in die Steuerung der LCN-GVS einzubinden. Auch das ist realisierbar. Für die hier gezeigte Lösung müssen wenige
Partnerportal Installateure Registrierung
 Partnerportal Installateure Registrierung Ein Tochterunternehmen der Süwag Energie AG Allgemeine Hinweise Diese Anleitung zeigt Ihnen, wie Sie sich als Nutzer für das Partnerportal Installateure registrieren
Partnerportal Installateure Registrierung Ein Tochterunternehmen der Süwag Energie AG Allgemeine Hinweise Diese Anleitung zeigt Ihnen, wie Sie sich als Nutzer für das Partnerportal Installateure registrieren
INNER WHEEL DEUTSCHLAND
 INNER WHEEL DEUTSCHLAND INTERNATIONAL INNER WHEEL 90. DISTRIKT Liebe Inner-Wheel-Freundin, IIW-Headquarters hat Ihnen ein Schreiben zugesandt mit der Bitte, sich dort registrieren zu lassen. Was möchte
INNER WHEEL DEUTSCHLAND INTERNATIONAL INNER WHEEL 90. DISTRIKT Liebe Inner-Wheel-Freundin, IIW-Headquarters hat Ihnen ein Schreiben zugesandt mit der Bitte, sich dort registrieren zu lassen. Was möchte
SMART Newsletter Education Solutions April 2015
 SMART Education Newsletter April 2015 SMART Newsletter Education Solutions April 2015 Herzlich Willkommen zur aktuellen Ausgabe des Westcon & SMART Newsletters jeden Monat stellen wir Ihnen die neuesten
SMART Education Newsletter April 2015 SMART Newsletter Education Solutions April 2015 Herzlich Willkommen zur aktuellen Ausgabe des Westcon & SMART Newsletters jeden Monat stellen wir Ihnen die neuesten
Die Online-Meetings bei den Anonymen Alkoholikern. zum Thema. Online - Meetings. Eine neue Form der Selbsthilfe?
 Die Online-Meetings bei den Anonymen Alkoholikern zum Thema Online - Meetings Eine neue Form der Selbsthilfe? Informationsverhalten von jungen Menschen (Quelle: FAZ.NET vom 2.7.2010). Erfahrungen können
Die Online-Meetings bei den Anonymen Alkoholikern zum Thema Online - Meetings Eine neue Form der Selbsthilfe? Informationsverhalten von jungen Menschen (Quelle: FAZ.NET vom 2.7.2010). Erfahrungen können
DOKUMENTATION VOGELZUCHT 2015 PLUS
 DOKUMENTATION VOGELZUCHT 2015 PLUS Vogelzucht2015 App für Geräte mit Android Betriebssystemen Läuft nur in Zusammenhang mit einer Vollversion vogelzucht2015 auf einem PC. Zusammenfassung: a. Mit der APP
DOKUMENTATION VOGELZUCHT 2015 PLUS Vogelzucht2015 App für Geräte mit Android Betriebssystemen Läuft nur in Zusammenhang mit einer Vollversion vogelzucht2015 auf einem PC. Zusammenfassung: a. Mit der APP
Verschlüsseln von Dateien mit Hilfe einer TCOS-Smartcard per Truecrypt. T-Systems International GmbH. Version 1.0 Stand 29.06.11
 Verschlüsseln von Dateien mit Hilfe einer TCOS-Smartcard per Truecrypt T-Systems International GmbH Version 1.0 Stand 29.06.11 Impressum Herausgeber T-Systems International GmbH Untere Industriestraße
Verschlüsseln von Dateien mit Hilfe einer TCOS-Smartcard per Truecrypt T-Systems International GmbH Version 1.0 Stand 29.06.11 Impressum Herausgeber T-Systems International GmbH Untere Industriestraße
Wie Sie mit Mastern arbeiten
 Wie Sie mit Mastern arbeiten Was ist ein Master? Einer der großen Vorteile von EDV besteht darin, dass Ihnen der Rechner Arbeit abnimmt. Diesen Vorteil sollten sie nutzen, wo immer es geht. In PowerPoint
Wie Sie mit Mastern arbeiten Was ist ein Master? Einer der großen Vorteile von EDV besteht darin, dass Ihnen der Rechner Arbeit abnimmt. Diesen Vorteil sollten sie nutzen, wo immer es geht. In PowerPoint
GEORG.NET Anbindung an Ihr ACTIVE-DIRECTORY
 GEORG.NET Anbindung an Ihr ACTIVE-DIRECTORY Vorteile der Verwendung eines ACTIVE-DIRECTORY Automatische GEORG Anmeldung über bereits erfolgte Anmeldung am Betriebssystem o Sie können sich jederzeit als
GEORG.NET Anbindung an Ihr ACTIVE-DIRECTORY Vorteile der Verwendung eines ACTIVE-DIRECTORY Automatische GEORG Anmeldung über bereits erfolgte Anmeldung am Betriebssystem o Sie können sich jederzeit als
Datei Erweiterungen Anzeigen!
 Einleitung Beim Kauf eines PCs werden die Dateierweiterungen sowie einige Dateien nicht angezeigt. Grund: Es gibt sehr viele Dateien die für das System ganz wichtig sind. Diese Dateien und auch Ordner
Einleitung Beim Kauf eines PCs werden die Dateierweiterungen sowie einige Dateien nicht angezeigt. Grund: Es gibt sehr viele Dateien die für das System ganz wichtig sind. Diese Dateien und auch Ordner
Mit der Maus im Menü links auf den Menüpunkt 'Seiten' gehen und auf 'Erstellen klicken.
 Seite erstellen Mit der Maus im Menü links auf den Menüpunkt 'Seiten' gehen und auf 'Erstellen klicken. Es öffnet sich die Eingabe Seite um eine neue Seite zu erstellen. Seiten Titel festlegen Den neuen
Seite erstellen Mit der Maus im Menü links auf den Menüpunkt 'Seiten' gehen und auf 'Erstellen klicken. Es öffnet sich die Eingabe Seite um eine neue Seite zu erstellen. Seiten Titel festlegen Den neuen
ACHTUNG: Es können gpx-dateien und mit dem GP7 aufgezeichnete trc-dateien umgewandelt werden.
 Track in Route umwandeln ACHTUNG: Ein Track kann nur dann in eine Route umgewandelt werden, wenn der Track auf Wegen gefahren wurde. Ein Querfeldein-Track kann nicht in eine Route umgewandelt werden, da
Track in Route umwandeln ACHTUNG: Ein Track kann nur dann in eine Route umgewandelt werden, wenn der Track auf Wegen gefahren wurde. Ein Querfeldein-Track kann nicht in eine Route umgewandelt werden, da
Persönliche Zukunftsplanung mit Menschen, denen nicht zugetraut wird, dass sie für sich selbst sprechen können Von Susanne Göbel und Josef Ströbl
 Persönliche Zukunftsplanung mit Menschen, denen nicht zugetraut Von Susanne Göbel und Josef Ströbl Die Ideen der Persönlichen Zukunftsplanung stammen aus Nordamerika. Dort werden Zukunftsplanungen schon
Persönliche Zukunftsplanung mit Menschen, denen nicht zugetraut Von Susanne Göbel und Josef Ströbl Die Ideen der Persönlichen Zukunftsplanung stammen aus Nordamerika. Dort werden Zukunftsplanungen schon
Favoriten sichern. Sichern der eigenen Favoriten aus dem Webbrowser. zur Verfügung gestellt durch: ZID Dezentrale Systeme.
 Favoriten sichern Sichern der eigenen Favoriten aus dem Webbrowser zur Verfügung gestellt durch: ZID Dezentrale Systeme Februar 2015 Seite 2 von 20 Inhaltsverzeichnis Einleitung... 3 Mozilla Firefox...
Favoriten sichern Sichern der eigenen Favoriten aus dem Webbrowser zur Verfügung gestellt durch: ZID Dezentrale Systeme Februar 2015 Seite 2 von 20 Inhaltsverzeichnis Einleitung... 3 Mozilla Firefox...
Das sogenannte Beamen ist auch in EEP möglich ohne das Zusatzprogramm Beamer. Zwar etwas umständlicher aber es funktioniert
 Beamen in EEP Das sogenannte Beamen ist auch in EEP möglich ohne das Zusatzprogramm Beamer. Zwar etwas umständlicher aber es funktioniert Zuerst musst du dir 2 Programme besorgen und zwar: Albert, das
Beamen in EEP Das sogenannte Beamen ist auch in EEP möglich ohne das Zusatzprogramm Beamer. Zwar etwas umständlicher aber es funktioniert Zuerst musst du dir 2 Programme besorgen und zwar: Albert, das
Beschreibung des MAP-Tools
 1. Funktionen des MAP-Tool 2. Aufbau des MAP-Tools 3. Arbeiten mit dem MAP-Tool Beschreibung MAP-Tool.doc Erstellt von Thomas Paral 1 Funktionen des MAP-Tool Die Hauptfunktion des MAP-Tools besteht darin,
1. Funktionen des MAP-Tool 2. Aufbau des MAP-Tools 3. Arbeiten mit dem MAP-Tool Beschreibung MAP-Tool.doc Erstellt von Thomas Paral 1 Funktionen des MAP-Tool Die Hauptfunktion des MAP-Tools besteht darin,
Wachstum 2. Michael Dröttboom 1 LernWerkstatt-Selm.de
 1. Herr Meier bekommt nach 3 Jahren Geldanlage 25.000. Er hatte 22.500 angelegt. Wie hoch war der Zinssatz? 2. Herr Meiers Vorfahren haben bei der Gründung Roms (753. V. Chr.) 1 Sesterze auf die Bank gebracht
1. Herr Meier bekommt nach 3 Jahren Geldanlage 25.000. Er hatte 22.500 angelegt. Wie hoch war der Zinssatz? 2. Herr Meiers Vorfahren haben bei der Gründung Roms (753. V. Chr.) 1 Sesterze auf die Bank gebracht
SJ OFFICE - Update 3.0
 SJ OFFICE - Update 3.0 Das Update auf die vorherige Version 2.0 kostet netto Euro 75,00 für die erste Lizenz. Das Update für weitere Lizenzen kostet jeweils netto Euro 18,75 (25%). inkl. Programmsupport
SJ OFFICE - Update 3.0 Das Update auf die vorherige Version 2.0 kostet netto Euro 75,00 für die erste Lizenz. Das Update für weitere Lizenzen kostet jeweils netto Euro 18,75 (25%). inkl. Programmsupport
Über die Internetseite www.cadwork.de Hier werden unter Download/aktuelle Versionen die verschiedenen Module als zip-dateien bereitgestellt.
 Internet, Codes und Update ab Version 13 Um Ihnen einen möglichst schnellen Zugang zu den aktuellsten Programmversionen zu ermöglichen liegen Update-Dateien für Sie im Internet bereit. Es gibt drei Möglichkeiten
Internet, Codes und Update ab Version 13 Um Ihnen einen möglichst schnellen Zugang zu den aktuellsten Programmversionen zu ermöglichen liegen Update-Dateien für Sie im Internet bereit. Es gibt drei Möglichkeiten
Fax einrichten auf Windows XP-PC
 Um ein PC Fax fähig zu machen braucht man einen sogenannten Telefon Anschluss A/B das heißt, Fax funktioniert im Normalfall nur mit Modem nicht mit DSL. Die meisten neueren PCs haben ein Modem integriert.
Um ein PC Fax fähig zu machen braucht man einen sogenannten Telefon Anschluss A/B das heißt, Fax funktioniert im Normalfall nur mit Modem nicht mit DSL. Die meisten neueren PCs haben ein Modem integriert.
Evangelisieren warum eigentlich?
 Predigtreihe zum Jahresthema 1/12 Evangelisieren warum eigentlich? Ich evangelisiere aus Überzeugung Gründe, warum wir nicht evangelisieren - Festes Bild von Evangelisation - Negative Erfahrungen von und
Predigtreihe zum Jahresthema 1/12 Evangelisieren warum eigentlich? Ich evangelisiere aus Überzeugung Gründe, warum wir nicht evangelisieren - Festes Bild von Evangelisation - Negative Erfahrungen von und