3. Übertragungsfunktionen
|
|
|
- Sophie Bauer
- vor 6 Jahren
- Abrufe
Transkript
1 Definitionen: Die Fourier-Transformierte der Impulsantwortfunktion heißt Übertragungsfunktion: H ( f )= h(t )e 2 π i f t dt Mithilfe der Übertragungsfunktion kann die Fourier-Transformierte der Antwort leicht aus der Fourier-Transformierten der Anregung berechnet werden: L( f )= X ( f )= l (t )e 2 π i f t dt x(t )e 2 π i f t dt X ( f )=H ( f ) L( f ) 2.3-1
2 Für die Übertragungsfunktion folgt: H ( f )=X( f )/ L( f ) Bezeichnungen für spezielle Übertragungsfunktionen: Dynamische Flexibilität = Verschiebung / Kraft Mobilität (Admittanz) = Geschwindigkeit / Kraft Akzeleranz (Inertanz) = Beschleunigung / Kraft Die Kehrwerte sind: Dynamische Steifigkeit = Kraft / Verschiebung Impedanz = Kraft / Geschwindigkeit Dynamische Masse = Kraft / Beschleunigung 2.3-2
3 Deutung: Betrachtet wird ein System, das durch eine harmonische Last l (t )=l 0 cos(2 π f t )=R(l 0 e 2 π i f t ) angeregt wird. Für die Antwort gilt: x (t )= h( τ)l(t τ)d τ= h( τ) R (l 0 e 2π i f (t τ) ) d τ =l 0 R ( h(τ)e 2 π i f (t τ) d τ ) 2.3-3
4 Das Integral berechnet sich zu h (τ)e 2 π i f (t τ) d τ= h( τ)e 2 π i f τ d τ e 2πi f t =H ( f ) e 2π i f t. Damit gilt für die Antwort: x (t )=R( H ( f )l 0 e 2 π i f t )=R (X 0 ( f )e 2 π i f t ) mit X 0 ( f )=H ( f )l 0 Die Antwort auf eine harmonische Last ist eine harmonische Funktion mit der gleichen Frequenz f. Für die Übertragungsfunktion gilt: H ( f )=X 0 ( f )/l
5 Die Übertragungsfunktion ist gleich der komplexen Amplitude der Antwort auf eine harmonische Last mit der Amplitude eins. Sie wird daher auch als Frequenzgang bezeichnet. Bei einem realen Vorgang entspricht die harmonische Antwort dem eingeschwungenen Zustand, der sich einstellt, wenn die Schwingungen infolge der Anfangsbedingungen abgeklungen sind
6 Beispiel: System mit einem Freiheitsgrad Die Übertragungsfunktion lässt sich am einfachsten durch Fourier-Transformation der Bewegungsgleichung ermitteln: m ẍ+d ẋ +c x=l(t ) ( (2 π f ) 2 m+2 π i f d+c ) X ( f )=L( f ) H ( f )= X ( f ) L( f ) = 1 c (2 π f ) 2 m+2 π i f d Die Fourier-Transformation der Impulsantwort führt auf das gleiche Ergebnis
7 Bei Anregung mit einer harmonischen Last gilt: X 0 ( f )=H ( f )l 0 = l 0 c (2 π f ) 2 m+2 π i f d Mit der Erregerkreisfrequenz Ω = 2πf folgt: X 0 (Ω)= l 0 c 1 1 Ω 2 m/c +i Ω d /c Mit der statischen Lösung x s = l 0 /c sowie ω 2 =c / m, c=ω 2 m, δ=d /(2 m), D=δ/ω folgt: X 0 (Ω)= x s 1 Ω 2 /ω 2 +2 i D Ω/ω 2.3-7
8 Mit dem Frequenzverhältnis η = Ω/ω gilt: Daraus folgt für die reelle Amplitude und den Phasenwinkel: x 0 = Die Funktion X 0 (η)= x s 1 η 2 +2i D η = 1 η2 2i D η (1 η 2 ) 2 +4 D 2 η 2 x s 1 x (1 η 2 ) 2 s =V F (η) x s, tan (ϕ)= 2 D η +4 D 2 η 2 1 η 2 1 V F (η)= (1 η 2 ) 2 +4 D 2 η 2 wird als dynamischer Überhöhungsfaktor bezeichnet
9 Dynamischer Überhöhungsfaktor: 2.3-9
10 Phasenwinkel:
11 Diskussion des Frequenzgangs für ein System mit einem Freiheitsgrad: Bereich 1: η < 0,8 (unterkritisch) Bei schwacher Dämpfung (D < 10 %) hat die Dämpfung praktisch keinen Einfluss. Die Verschiebung ist in Phase mit der Anregung. Es gilt in guter Näherung: V F 1 1 η 2 Für η < 0,3 können Dämpfungs- und Trägheitskräfte vernachlässigt werden. Die Amplitude weicht nur wenig von der statischen Lösung ab (Quasistatische Lösung)
12 Bereich 2: 0,8 < η < 1,2 (kritisch) Dieser Bereich wird wesentlich von der Dämpfung beeinflusst. Die Verschiebung hat eine Phasenverschiebung von 90 gegenüber der Anregung. Die Geschwindigkeit ist in Phase mit der Anregung. Bei η = 1 sind Trägheits- und Federkraft im Gleichgewicht. Die Anregung ist im Gleichgewicht mit der Dämpfungskraft. Der Zustand bei η = 1 heißt Resonanz
13 Bereich 3: η > 1,2 (überkritisch) Bei schwacher Dämpfung (D < 10 %) hat die Dämpfung praktisch keinen Einfluss. Die Verschiebung hat eine Phasenverschiebung von -180 gegenüber der Anregung. Die Beschleunigung ist in Phase mit der Anregung. Es gilt in guter Näherung: V F 1 η 2 1 Für η > 3 ist die Trägheitskraft groß gegenüber der Feder- und der Dämpferkraft
14 Maximum der Überhöhung: Der Nenner hat ein Minimum: N (η)=(1 η 2 ) 2 +4 D 2 η 2 =Min. 0= dn d η =2(1 η2 ) ( 2 η)+4 D 2 (2 η) 2 η max 1+2 D 2 =0 η max = 1 2 D 2 Die Frequenz, bei der das Maximum auftritt, ist niedriger als die Resonanzfrequenz des ungedämpften Schwingers. Für D 2/2 kann kein Maximum auftreten. Für kleine Werte der Dämpfung gilt: η max 1, V Fmax 1 2 D
15 Halbwertsbreite: Gesucht werden die Erregerfrequenzen, bei denen das Quadrat des dynamischen Überhöhungsfaktors gleich der Hälfte des Quadrats des maximalen Überhöhungsfaktors ist. Dabei wird vorausgesetzt, dass die Dämpfung klein ist (D < 10 %). Bedingung: Lösung: 2= V 2 Fmax V 2 F (η) = (1 η 2 ) 2 +4 D 2 η 2 4 D 2 η 4 2 (1 2 D 2 ) η 2 +(1 8 D 2 )=0 2 η 1/2 =1 2 D 2 ± (1 2 D 2 ) 2 (1 8 D 2 )=1 2 D 2 ± 4 D 2 (1+D 2 ) =1 2 D 2 ±2 D 1+D
16 Näherung für D 2 1 : η 2 1/2 1±2 D η 1 1 D, η 2 1+D Der Bereich zwischen η1 und η 2 wird als Halbwertsbreite bezeichnet. Die Halbwertsbreite erlaubt eine genauere Eingrenzung des kritischen Bereichs
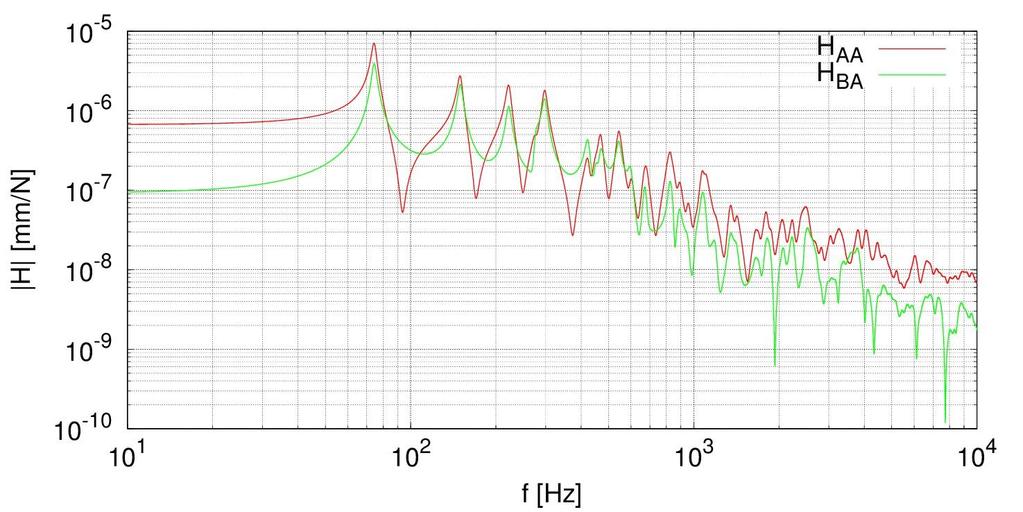
17 Übertragungsfunktionen einer realen Struktur: Anregung: Kraft la (t) w A A B w B Antworten: Verschiebungen wa (t) und w B (t) Übertragungsfunktionen: l A H AA ( f )=W A ( f )/ L A ( f ) H BA ( f )=W B ( f )/ L A ( f )
18 2.3-18
3. Erzwungene Schwingungen
 3. Erzwungene Schwingungen Bei erzwungenen Schwingungen greift am schwingenden System eine zeitlich veränderliche äußere Anregung an. Kraftanregung: Am schwingenden System greift eine zeitlich veränderliche
3. Erzwungene Schwingungen Bei erzwungenen Schwingungen greift am schwingenden System eine zeitlich veränderliche äußere Anregung an. Kraftanregung: Am schwingenden System greift eine zeitlich veränderliche
5. Fourier-Transformation
 Fragestellungen: 5. Fourier-Transformation Bei Anregung mit einer harmonischen Last kann quasistatitisch gerechnet werden, wenn die Erregerfrequenz kleiner als etwa 30% der Resonanzfrequenz ist. Wann darf
Fragestellungen: 5. Fourier-Transformation Bei Anregung mit einer harmonischen Last kann quasistatitisch gerechnet werden, wenn die Erregerfrequenz kleiner als etwa 30% der Resonanzfrequenz ist. Wann darf
3. Erzwungene Schwingungen
 3. Erzwungene Schwingungen 3.1 Grundlagen 3.2 Tilger 3.3 Kragbalken 3.4 Fahrbahnanregung 3.3-1 3.1 Grundlagen Untersucht wird die Antwort des Systems auf eine Anregung mit harmonischem Zeitverlauf. Bewegungsgleichung:
3. Erzwungene Schwingungen 3.1 Grundlagen 3.2 Tilger 3.3 Kragbalken 3.4 Fahrbahnanregung 3.3-1 3.1 Grundlagen Untersucht wird die Antwort des Systems auf eine Anregung mit harmonischem Zeitverlauf. Bewegungsgleichung:
4. Dämpfungsmodelle. 4.1 Grundlagen 4.2 Viskose Dämpfung 4.3 Modale Dämpfung 4.4 Rayleigh-Dämpfung 4.5 Strukturdämpfung. Elastodynamik 3.
 4. Dämpfungsmodelle 4.1 Grundlagen 4.2 Viskose Dämpfung 4.3 Modale Dämpfung 4.4 Rayleigh-Dämpfung 4.5 Strukturdämpfung 3.4-1 4.1 Grundlagen Dämpfung ist ein Prozess, bei dem Energie dissipiert wird. Dabei
4. Dämpfungsmodelle 4.1 Grundlagen 4.2 Viskose Dämpfung 4.3 Modale Dämpfung 4.4 Rayleigh-Dämpfung 4.5 Strukturdämpfung 3.4-1 4.1 Grundlagen Dämpfung ist ein Prozess, bei dem Energie dissipiert wird. Dabei
Lineare Systeme mit einem Freiheitsgrad
 Höhere Technische Mechanik Lineare Systeme mit einem Freiheitsgrad Prof. Dr.-Ing. Ulrike Zwiers, M.Sc. Fachbereich Mechatronik und Maschinenbau Hochschule Bochum WS 2009/200 Übersicht. Grundlagen der Analytischen
Höhere Technische Mechanik Lineare Systeme mit einem Freiheitsgrad Prof. Dr.-Ing. Ulrike Zwiers, M.Sc. Fachbereich Mechatronik und Maschinenbau Hochschule Bochum WS 2009/200 Übersicht. Grundlagen der Analytischen
4.1 Grundlagen 4.2 Viskose Dämpfung 4.3 Modale Dämpfung 4.4 Rayleigh-Dämpfung 4.5 Strukturdämpfung. 4. Dämpfungsmodelle. Elastodynamik 1 3.
 4.1 Grundlagen 4.2 Viskose Dämpfung 4.3 Modale Dämpfung 4.4 Rayleigh-Dämpfung 4.5 Strukturdämpfung 4. Dämpfungsmodelle 3.4-1 4.1 Grundlagen Dämpfung ist ein Prozess, bei dem Energie dissipiert wird. Mechanische
4.1 Grundlagen 4.2 Viskose Dämpfung 4.3 Modale Dämpfung 4.4 Rayleigh-Dämpfung 4.5 Strukturdämpfung 4. Dämpfungsmodelle 3.4-1 4.1 Grundlagen Dämpfung ist ein Prozess, bei dem Energie dissipiert wird. Mechanische
Grundlagen der Physik 2 Schwingungen und Wärmelehre
 (c) Ulm University p. 1/ Grundlagen der Physik Schwingungen und Wärmelehre 3. 04. 006 Othmar Marti othmar.marti@uni-ulm.de Experimentelle Physik Universität Ulm (c) Ulm University p. / Physikalisches Pendel
(c) Ulm University p. 1/ Grundlagen der Physik Schwingungen und Wärmelehre 3. 04. 006 Othmar Marti othmar.marti@uni-ulm.de Experimentelle Physik Universität Ulm (c) Ulm University p. / Physikalisches Pendel
Dämpfung. . Grundlagen. Viskose Dämpfung. Modale Dämpfung. Rayleigh-Dämpfung. Strukturdämpfung. Elastodynamik 2 SS
 Dämpfung. Grundlagen. Viskose Dämpfung. Modale Dämpfung. Rayleigh-Dämpfung. Strukturdämpfung 5. Dämpfung 5-1 1. Grundlagen Dämpfung ist ein Prozess, bei dem Energie dissipiert wird. Mechanische Energie
Dämpfung. Grundlagen. Viskose Dämpfung. Modale Dämpfung. Rayleigh-Dämpfung. Strukturdämpfung 5. Dämpfung 5-1 1. Grundlagen Dämpfung ist ein Prozess, bei dem Energie dissipiert wird. Mechanische Energie
Ausblick. 1. Lineare dynamische Analysen 2. Nichtlineare Analysen 3. Weitere Anwendungen. Prof. Dr. Wandinger 5. Ausblick FEM 5-1
 Ausblick 1. Lineare dynamische Analysen 2. Nichtlineare Analysen 3. Weitere Anwendungen Prof. Dr. Wandinger 5. Ausblick FEM 5-1 1. Lineare dynamische Analysen Beschleunigungen: Bei linearen dynamischen
Ausblick 1. Lineare dynamische Analysen 2. Nichtlineare Analysen 3. Weitere Anwendungen Prof. Dr. Wandinger 5. Ausblick FEM 5-1 1. Lineare dynamische Analysen Beschleunigungen: Bei linearen dynamischen
2. Schwingungen eines Einmassenschwingers
 Baudynamik (Master) SS 2017 2. Schwingungen eines Einmassenschwingers 2.1 Freie Schwingungen 2.1.1 Freie ungedämpfte Schwingungen 2.1.2 Federzahlen und Federschaltungen 2.1.3 Freie gedämpfte Schwingungen
Baudynamik (Master) SS 2017 2. Schwingungen eines Einmassenschwingers 2.1 Freie Schwingungen 2.1.1 Freie ungedämpfte Schwingungen 2.1.2 Federzahlen und Federschaltungen 2.1.3 Freie gedämpfte Schwingungen
2. Freie gedämpfte Schwingungen
 2. Freie gedämpfte Schwingungen Bei realen Systemen werden die Schwingungsausschläge mit der Zeit kleiner, und die Schwingung kommt zum Stillstand. Ursache sind Energieverluste durch Reibungs- und Dämpfungskräfte:
2. Freie gedämpfte Schwingungen Bei realen Systemen werden die Schwingungsausschläge mit der Zeit kleiner, und die Schwingung kommt zum Stillstand. Ursache sind Energieverluste durch Reibungs- und Dämpfungskräfte:
Technische Schwingungslehre Prof. Dr.-Ing. habil. Michael Hanss. Aufgabensammlung mit Kurzlösungen
 Prof. Dr.-Ing. Prof. E.h. P. Eberhard / Prof. Dr.-Ing. M. Hanss SS 17 Ü1 Technische Schwingungslehre Prof. Dr.-Ing. habil. Michael Hanss Aufgabensammlung mit Kurzlösungen Sommersemester 017 Prof. Dr.-Ing.
Prof. Dr.-Ing. Prof. E.h. P. Eberhard / Prof. Dr.-Ing. M. Hanss SS 17 Ü1 Technische Schwingungslehre Prof. Dr.-Ing. habil. Michael Hanss Aufgabensammlung mit Kurzlösungen Sommersemester 017 Prof. Dr.-Ing.
Praktikum EE2 Grundlagen der Elektrotechnik. Name: Testat : Einführung
 Fachbereich Elektrotechnik Ortskurven Seite 1 Name: Testat : Einführung 1. Definitionen und Begriffe 1.1 Ortskurven für den Strom I und für den Scheinleistung S Aus den Ortskurven für die Impedanz Z(f)
Fachbereich Elektrotechnik Ortskurven Seite 1 Name: Testat : Einführung 1. Definitionen und Begriffe 1.1 Ortskurven für den Strom I und für den Scheinleistung S Aus den Ortskurven für die Impedanz Z(f)
Resonanz Versuchsvorbereitung
 Versuche P1-1,, Resonanz Versuchsvorbereitung Thomas Keck, Gruppe: Mo-3 Karlsruhe Institut für Technologie, Bachelor Physik Versuchstag: 0.1.010 1 1 Vorwort Im Praktikumsversuch,,Resonanz geht es um freie
Versuche P1-1,, Resonanz Versuchsvorbereitung Thomas Keck, Gruppe: Mo-3 Karlsruhe Institut für Technologie, Bachelor Physik Versuchstag: 0.1.010 1 1 Vorwort Im Praktikumsversuch,,Resonanz geht es um freie
Dynamische Lasten. 1. Kraft- und Weganregung 2. Deterministische Lasten. 3. Stochastische Lasten
 Dynamische Lasten 1. Kraft- und Weganregung 2. Deterministische Lasten 2.1 Allgemeine zeitabhängige Lasten 2.2 Periodische Lasten 2.3 Harmonische Lasten 3. Stochastische Lasten 3.1 Instationäre stochastische
Dynamische Lasten 1. Kraft- und Weganregung 2. Deterministische Lasten 2.1 Allgemeine zeitabhängige Lasten 2.2 Periodische Lasten 2.3 Harmonische Lasten 3. Stochastische Lasten 3.1 Instationäre stochastische
5 Schwingungen und Wellen
 5 Schwingungen und Wellen Schwingung: Regelmäßige Bewegung, die zwischen zwei Grenzen hin- & zurückführt Zeitlich periodische Zustandsänderung mit Periode T ψ ψ(t) [ ψ(t-τ)] Wellen: Periodische Zustandsänderung
5 Schwingungen und Wellen Schwingung: Regelmäßige Bewegung, die zwischen zwei Grenzen hin- & zurückführt Zeitlich periodische Zustandsänderung mit Periode T ψ ψ(t) [ ψ(t-τ)] Wellen: Periodische Zustandsänderung
9. Periodische Bewegungen
 Inhalt 9.1 Schwingungen 9.1.2 Schwingungsenergie 9.1.3 Gedämpfte Schwingung 9.1.4 Erzwungene Schwingung 9.1 Schwingungen 9.1 Schwingungen Schwingung Zustand y wiederholt sich in bestimmten Zeitabständen
Inhalt 9.1 Schwingungen 9.1.2 Schwingungsenergie 9.1.3 Gedämpfte Schwingung 9.1.4 Erzwungene Schwingung 9.1 Schwingungen 9.1 Schwingungen Schwingung Zustand y wiederholt sich in bestimmten Zeitabständen
Experimentalphysik E1
 Experimentalphysik E1 Erzwungene & gekoppelte Schwingungen Alle Informationen zur Vorlesung unter : http://www.physik.lmu.de/lehre/vorlesungen/index.html 10. Jan. 016 Gedämpfte Schwingungen m d x dt +
Experimentalphysik E1 Erzwungene & gekoppelte Schwingungen Alle Informationen zur Vorlesung unter : http://www.physik.lmu.de/lehre/vorlesungen/index.html 10. Jan. 016 Gedämpfte Schwingungen m d x dt +
2. Einmassenschwinger. Inhalt:
 . Einmassenschwinger Inhalt:.1 Bewegungsdifferentialgleichung. Eigenschwingung.3 Harmonische Anregung.4 Schwingungsisolation.5 Stossartige Belastung.6 Allgemeine Belastung.7 Nichtlineare Systeme.8 Dämpfungsarten
. Einmassenschwinger Inhalt:.1 Bewegungsdifferentialgleichung. Eigenschwingung.3 Harmonische Anregung.4 Schwingungsisolation.5 Stossartige Belastung.6 Allgemeine Belastung.7 Nichtlineare Systeme.8 Dämpfungsarten
6. Erzwungene Schwingungen
 6. Erzwungene Schwingungen Ein durch zeitveränderliche äußere Einwirkung zum Schwingen angeregtes (gezwungenes) System führt erzwungene Schwingungen durch. Bedeutsam sind vor allem periodische Erregungen
6. Erzwungene Schwingungen Ein durch zeitveränderliche äußere Einwirkung zum Schwingen angeregtes (gezwungenes) System führt erzwungene Schwingungen durch. Bedeutsam sind vor allem periodische Erregungen
TONTECHNIK HÖREN // SCHALLWANDLER // IMPULSANTWORT UND FALTUNG // DIGITALE SIGNALE // MEHRKANALTECHNIK // TONTECHNISCHE PRAXIS
 4., aktualisierte Auflage thomas GÖRNE TONTECHNIK HÖREN // SCHALLWANDLER // IMPULSANTWORT UND FALTUNG // DIGITALE SIGNALE // MEHRKANALTECHNIK // TONTECHNISCHE PRAXIS 18 1 Schall und Schwingungen 1.1 Mechanische
4., aktualisierte Auflage thomas GÖRNE TONTECHNIK HÖREN // SCHALLWANDLER // IMPULSANTWORT UND FALTUNG // DIGITALE SIGNALE // MEHRKANALTECHNIK // TONTECHNISCHE PRAXIS 18 1 Schall und Schwingungen 1.1 Mechanische
MR Mechanische Resonanz
 MR Mechanische Resonanz Blockpraktikum Herbst 2007 (Gruppe 2b) 24. Oktober 2007 Inhaltsverzeichnis Grundlagen 2. Freie, ungedämpfte Schwingung....................... 2.2 Freie, gedämpfte Schwingung........................
MR Mechanische Resonanz Blockpraktikum Herbst 2007 (Gruppe 2b) 24. Oktober 2007 Inhaltsverzeichnis Grundlagen 2. Freie, ungedämpfte Schwingung....................... 2.2 Freie, gedämpfte Schwingung........................
1. Kraft- und Weganregung 2. Deterministische Lasten. 3. Stochastische Lasten
 Dynamische Lasten 1. Kraft- und Weganregung 2. Deterministische Lasten 2.1 Periodische Lasten 2.2 Allgemeine zeitabhängige Lasten 2.3 Harmonische Lasten 3. Stochastische Lasten 3.1 Instationäre stochastische
Dynamische Lasten 1. Kraft- und Weganregung 2. Deterministische Lasten 2.1 Periodische Lasten 2.2 Allgemeine zeitabhängige Lasten 2.3 Harmonische Lasten 3. Stochastische Lasten 3.1 Instationäre stochastische
Vorbereitung. Resonanz. Carsten Röttele. 17. Januar Drehpendel, freie Schwingungen 3. 2 Drehpendel, freie gedämpfte Schwingungen 3
 Vorbereitung Resonanz Carsten Röttele 17. Januar 01 Inhaltsverzeichnis 1 Drehpendel, freie Schwingungen 3 Drehpendel, freie gedämpfte Schwingungen 3 3 Messung der Winkelrichtgröße D 4 4 Drehpendel, erzwungene
Vorbereitung Resonanz Carsten Röttele 17. Januar 01 Inhaltsverzeichnis 1 Drehpendel, freie Schwingungen 3 Drehpendel, freie gedämpfte Schwingungen 3 3 Messung der Winkelrichtgröße D 4 4 Drehpendel, erzwungene
Hochschule Düsseldorf University of Applied Sciences. 05. Januar 2017 HSD. Physik. Schwingungen II
 Physik Schwingungen II Ort, Geschwindigkeit, Beschleunigung x(t) = cos! 0 t v(t) =ẋ(t) =! 0 sin! 0 t t a(t) =ẍ(t) =! 2 0 cos! 0 t Energie In einem mechanischen System ist die Gesamtenergie immer gleich
Physik Schwingungen II Ort, Geschwindigkeit, Beschleunigung x(t) = cos! 0 t v(t) =ẋ(t) =! 0 sin! 0 t t a(t) =ẍ(t) =! 2 0 cos! 0 t Energie In einem mechanischen System ist die Gesamtenergie immer gleich
2. Lagrange-Gleichungen
 2. Lagrange-Gleichungen Mit dem Prinzip der virtuellen Leistung lassen sich die Bewegungsgleichungen für komplexe Systeme einfach aufstellen. Aus dem Prinzip der virtuellen Leistung lassen sich die Lagrange-Gleichungen
2. Lagrange-Gleichungen Mit dem Prinzip der virtuellen Leistung lassen sich die Bewegungsgleichungen für komplexe Systeme einfach aufstellen. Aus dem Prinzip der virtuellen Leistung lassen sich die Lagrange-Gleichungen
Musterlösungen (ohne Gewähr)
") Seite /9 Frage ( Punkte) Eine Waschmaschine hat einen mit Feder und Dämpfer gelagerten Motor (Masse m), an dem ohne Unwucht die Trommel befestigt ist. Wieviel Wäsche m u kann geschleudert werden, wenn
Seite /9 Frage ( Punkte) Eine Waschmaschine hat einen mit Feder und Dämpfer gelagerten Motor (Masse m), an dem ohne Unwucht die Trommel befestigt ist. Wieviel Wäsche m u kann geschleudert werden, wenn
Resonanzverhalten eines Masse-Feder Systems (M10)
") Resonanzverhalten eines Masse-Feder Systems M0) Ziel des Versuches In diesem Versuch werden freie, freie gedämpfte und erzwungene Schwingungen an einem Masse-Feder System untersucht Die Resonanzkurven
Resonanzverhalten eines Masse-Feder Systems M0) Ziel des Versuches In diesem Versuch werden freie, freie gedämpfte und erzwungene Schwingungen an einem Masse-Feder System untersucht Die Resonanzkurven
Schwingungen. Inhaltsverzeichnis. TU München Experimentalphysik 1 DVP Vorbereitungskurs. Andreas Brenneis; Rebecca Saive; Felicitas Thorne
 TU München Experimentalphysik 1 DVP Vorbereitungskurs Andreas Brenneis; Rebecca Saive; Felicitas Thorne Schwingungen Donnerstag, der 31.07.008 Inhaltsverzeichnis 1 Einleitung: Schwingungen und Wellen 1
TU München Experimentalphysik 1 DVP Vorbereitungskurs Andreas Brenneis; Rebecca Saive; Felicitas Thorne Schwingungen Donnerstag, der 31.07.008 Inhaltsverzeichnis 1 Einleitung: Schwingungen und Wellen 1
Laplace-Transformation
 Laplace-Transformation Gegeben: Funktion mit beschränktem Wachstum: x(t) Ke ct t [, ) Definition: Laplace-Transformation: X(s) = e st x(t) dt = L{x(t)} s C Re(s) >c Definition: Inverse Laplace-Transformation:
Laplace-Transformation Gegeben: Funktion mit beschränktem Wachstum: x(t) Ke ct t [, ) Definition: Laplace-Transformation: X(s) = e st x(t) dt = L{x(t)} s C Re(s) >c Definition: Inverse Laplace-Transformation:
Fakultät Grundlagen. Februar 2016
 Schwingungsdifferenzialgleichung Fakultät Grundlagen Hochschule Esslingen Februar 016 Fakultät Grundlagen Schwingungsdifferenzialgleichung Übersicht 1 Schwingungsdifferenzialgleichung Fakultät Grundlagen
Schwingungsdifferenzialgleichung Fakultät Grundlagen Hochschule Esslingen Februar 016 Fakultät Grundlagen Schwingungsdifferenzialgleichung Übersicht 1 Schwingungsdifferenzialgleichung Fakultät Grundlagen
Formelsammlung: Physik I für Naturwissenschaftler
 Formelsammlung: Physik I für Naturwissenschaftler 1 Was ist Physik? Stand: 13. Dezember 212 Physikalische Größe X = Zahl [X] Einheit SI-Basiseinheiten Mechanik Zeit [t] = 1 s Länge [x] = 1 m Masse [m]
Formelsammlung: Physik I für Naturwissenschaftler 1 Was ist Physik? Stand: 13. Dezember 212 Physikalische Größe X = Zahl [X] Einheit SI-Basiseinheiten Mechanik Zeit [t] = 1 s Länge [x] = 1 m Masse [m]
Einführung in die Physik
 Einführung in die Physik für Pharmazeuten und Biologen (PPh) Mechanik, Elektrizitätslehre, Optik Übung : Vorlesung: Tutorials: Montags 13:15 bis 14 Uhr, Liebig-HS Montags 14:15 bis 15:45, Liebig HS Montags
Einführung in die Physik für Pharmazeuten und Biologen (PPh) Mechanik, Elektrizitätslehre, Optik Übung : Vorlesung: Tutorials: Montags 13:15 bis 14 Uhr, Liebig-HS Montags 14:15 bis 15:45, Liebig HS Montags
ERGEBNISSE TECHNISCHE MECHANIK III-IV Lehrstuhl für Technische Mechanik, TU Kaiserslautern
 ERGEBNISSE TECHNISCHE MECHANIK III-IV Lehrstuhl für Technische Mechanik, TU Kaiserslautern WS 12/13, 13.02.2013 1. Aufgabe: (TM III) Um vom Boden aufzustehen, rutscht ein Mensch mit konstanter Geschwindigkeitv
ERGEBNISSE TECHNISCHE MECHANIK III-IV Lehrstuhl für Technische Mechanik, TU Kaiserslautern WS 12/13, 13.02.2013 1. Aufgabe: (TM III) Um vom Boden aufzustehen, rutscht ein Mensch mit konstanter Geschwindigkeitv
Physik für Mediziner und Zahnmediziner
 Physik für Mediziner und Zahnmediziner Vorlesung 07 Prof. F. Wörgötter (nach M. Seibt) -- Physik für Mediziner und Zahnmediziner 1 Kontrollfragen Zeichnen Sie den typischen Verlauf einer Verformungskurve
Physik für Mediziner und Zahnmediziner Vorlesung 07 Prof. F. Wörgötter (nach M. Seibt) -- Physik für Mediziner und Zahnmediziner 1 Kontrollfragen Zeichnen Sie den typischen Verlauf einer Verformungskurve
Klassische Theoretische Physik I WS 2013/ Nicht so schnell (10 Punkte) Ein kleiner
 Ein kleiner") Karlsruher Institut für Technologie www.tkm.kit.edu/lehre/ Klassische Theoretische Physik I WS 23/24 Prof. Dr. J. Schmalian Blatt, Punkte Dr. P. P. Orth Abgabe und Besprechung 24..24. Nicht so schnell
Karlsruher Institut für Technologie www.tkm.kit.edu/lehre/ Klassische Theoretische Physik I WS 23/24 Prof. Dr. J. Schmalian Blatt, Punkte Dr. P. P. Orth Abgabe und Besprechung 24..24. Nicht so schnell
Vorlesung Physik für Pharmazeuten und Biologen
 Vorlesung Physik für Pharmazeuten und Biologen Schwingungen Mechanische Wellen Akustik Freier harmonischer Oszillator Beispiel: Das mathematische Pendel Bewegungsgleichung : d s mg sinϕ = m dt Näherung
Vorlesung Physik für Pharmazeuten und Biologen Schwingungen Mechanische Wellen Akustik Freier harmonischer Oszillator Beispiel: Das mathematische Pendel Bewegungsgleichung : d s mg sinϕ = m dt Näherung
Differentialgleichungen 2. Ordnung
 Differentialgleichungen 2. Ordnung 1-E1 1-E2 Einführendes Beispiel Freier Fall Viele Geschichten ranken sich um den schiefen Turm von Pisa: Der Legende nach hat der aus Pisa stammende Galileo Galilei bei
Differentialgleichungen 2. Ordnung 1-E1 1-E2 Einführendes Beispiel Freier Fall Viele Geschichten ranken sich um den schiefen Turm von Pisa: Der Legende nach hat der aus Pisa stammende Galileo Galilei bei
Übung zu Mechanik 4 Seite 28
 Übung zu Mechanik 4 Seite 28 Aufgabe 47 Auf ein Fundament (Masse m), dessen elastische Bettung durch zwei Ersatzfedern dargestellt wird, wirkt die periodische Kraft F(t) = F 0 cos (Ω t). Die seitliche
Übung zu Mechanik 4 Seite 28 Aufgabe 47 Auf ein Fundament (Masse m), dessen elastische Bettung durch zwei Ersatzfedern dargestellt wird, wirkt die periodische Kraft F(t) = F 0 cos (Ω t). Die seitliche
Hochschule Düsseldorf University of Applied Sciences. 12. Januar 2017 HSD. Physik. Schwingungen III
 Physik Schwingungen III Wiederholung Komplexe Zahlen Harmonischer Oszillator DGL Getrieben Gedämpft Komplexe Zahlen Eulersche Formel e i' = cos ' + i sin ' Komplexe Schwingung e i!t = cos!t + i sin!t Schwingung
Physik Schwingungen III Wiederholung Komplexe Zahlen Harmonischer Oszillator DGL Getrieben Gedämpft Komplexe Zahlen Eulersche Formel e i' = cos ' + i sin ' Komplexe Schwingung e i!t = cos!t + i sin!t Schwingung
Tutorium Physik 2. Schwingungen
 1 Tutorium Physik 2. Schwingungen SS 16 2.Semester BSc. Oec. und BSc. CH 2 Themen 7. Fluide 8. Rotation 9. Schwingungen 10. Elektrizität 11. Optik 12. Radioaktivität 3 9. SCHWINGUNGEN 9.1 Bestimmen der
1 Tutorium Physik 2. Schwingungen SS 16 2.Semester BSc. Oec. und BSc. CH 2 Themen 7. Fluide 8. Rotation 9. Schwingungen 10. Elektrizität 11. Optik 12. Radioaktivität 3 9. SCHWINGUNGEN 9.1 Bestimmen der
5. Kritische Drehzahl
 Aufgabenstellung: 5. Kritische Drehzahl y y Ω c/4 c/4 m c/4 e z O O S c/4 x Prof. Dr. Wandinger 6. Schwingungen Dynamik 2 6.5-1 Der starre Körper mit der Masse m dreht sich mit der konstanten Winkelgeschwindigkeit
Aufgabenstellung: 5. Kritische Drehzahl y y Ω c/4 c/4 m c/4 e z O O S c/4 x Prof. Dr. Wandinger 6. Schwingungen Dynamik 2 6.5-1 Der starre Körper mit der Masse m dreht sich mit der konstanten Winkelgeschwindigkeit
Schwingungen. Harmonische Schwingungen. t Anharmonische Schwingungen. S. Alexandrova FDIBA TU Sofia 1
 Schwingungen Harmonische Schwingungen x t Anharmonische Schwingungen x x t S. Alexandrova FDIBA TU Sofia 1 t ANHARMONISCHE SCHWINGUNGEN EHB : Kraft F = -k(x-x o ) Potentielle Energie: E p E p Parabel mit
Schwingungen Harmonische Schwingungen x t Anharmonische Schwingungen x x t S. Alexandrova FDIBA TU Sofia 1 t ANHARMONISCHE SCHWINGUNGEN EHB : Kraft F = -k(x-x o ) Potentielle Energie: E p E p Parabel mit
Übungen zur Experimentalphysik 3
 Übungen zur Experimentalphysik 3 Prof. Dr. L. Oberauer Wintersemester 2010/2011 3. Übungsblatt - 8.November 2010 Musterlösung Franziska Konitzer (franziska.konitzer@tum.de) Aufgabe 1 ( ) (2 Punkte) Berechnen
Übungen zur Experimentalphysik 3 Prof. Dr. L. Oberauer Wintersemester 2010/2011 3. Übungsblatt - 8.November 2010 Musterlösung Franziska Konitzer (franziska.konitzer@tum.de) Aufgabe 1 ( ) (2 Punkte) Berechnen
4. Gleichungen im Frequenzbereich
 Stationäre Geräusche: In der technischen Akustik werden überwiegend stationäre Geräusche untersucht. Stationäre Geräusche sind zusammengesetzt aus harmonischen Schallfeldern p x,t = p x cos t x Im Folgenden
Stationäre Geräusche: In der technischen Akustik werden überwiegend stationäre Geräusche untersucht. Stationäre Geräusche sind zusammengesetzt aus harmonischen Schallfeldern p x,t = p x cos t x Im Folgenden
PHYSIK FÜR MASCHINENBAU SCHWINGUNGEN UND WELLEN
 1 PHYSIK FÜR MASCHINENBAU SCHWINUNEN UND WELLEN Vorstellung: Professor Kilian Singer und Dr. Sam Dawkins (Kursmaterie teilweise von Dr. Saskia Kraft-Bermuth) EINFÜHRUN Diese Vorlesung behandelt ein in
1 PHYSIK FÜR MASCHINENBAU SCHWINUNEN UND WELLEN Vorstellung: Professor Kilian Singer und Dr. Sam Dawkins (Kursmaterie teilweise von Dr. Saskia Kraft-Bermuth) EINFÜHRUN Diese Vorlesung behandelt ein in
Gedämpfte harmonische Schwingung
 Gedämpfte harmonische Schwingung Die Differentialgleichung u + 2ru + ω 2 0u = c cos(ωt) mit r > 0 modelliert sowohl eine elastische Feder als auch einen elektrischen Schwingkreis. Gedämpfte harmonische
Gedämpfte harmonische Schwingung Die Differentialgleichung u + 2ru + ω 2 0u = c cos(ωt) mit r > 0 modelliert sowohl eine elastische Feder als auch einen elektrischen Schwingkreis. Gedämpfte harmonische
9. Vorlesung Wintersemester
 9. Vorlesung Wintersemester 1 Die Phase der angeregten Schwingung Wertebereich: bei der oben abgeleiteten Formel tan φ = β ω ω ω0. (1) ist noch zu sehen, in welchem Bereich der Winkel liegt. Aus der ursprünglichen
9. Vorlesung Wintersemester 1 Die Phase der angeregten Schwingung Wertebereich: bei der oben abgeleiteten Formel tan φ = β ω ω ω0. (1) ist noch zu sehen, in welchem Bereich der Winkel liegt. Aus der ursprünglichen
/U Wie groß ist den beiden unter 6. genannten Fällen der von der Spannungsquelle U 1 gelieferte Strom? als Formel. 1 + jωc = R 2.
 Aufgabe Ü6 Gegeben ist die angegebene Schaltung:. Berechnen Sie allgemein (als Formel) /. 2. Wie groß ist der Betrag von /? R 3. Um welchen Winkel ist gegenüber phasenverschoben? 4. Skizzieren Sie die
Aufgabe Ü6 Gegeben ist die angegebene Schaltung:. Berechnen Sie allgemein (als Formel) /. 2. Wie groß ist der Betrag von /? R 3. Um welchen Winkel ist gegenüber phasenverschoben? 4. Skizzieren Sie die
2. Lagrange-Gleichungen
 2. Lagrange-Gleichungen Mit dem Prinzip der virtuellen Leistung lassen sich die Bewegungsgleichungen für komplexe Systeme einfach aufstellen. Aus dem Prinzip der virtuellen Leistung lassen sich die Lagrange-Gleichungen
2. Lagrange-Gleichungen Mit dem Prinzip der virtuellen Leistung lassen sich die Bewegungsgleichungen für komplexe Systeme einfach aufstellen. Aus dem Prinzip der virtuellen Leistung lassen sich die Lagrange-Gleichungen
Resonanz und Dämpfung
 Resonanz und ämpfung Wenn eine Masse m an einem Federpendel (Federkonstante ) frei ohne ämpfung schwingt, genügt die Elongation s = s ( t ) der ifferentialgleichung m # s ( t ) + # s( t ) = 0. ies ist
Resonanz und ämpfung Wenn eine Masse m an einem Federpendel (Federkonstante ) frei ohne ämpfung schwingt, genügt die Elongation s = s ( t ) der ifferentialgleichung m # s ( t ) + # s( t ) = 0. ies ist
Probestudium der Physik 2011/12
 Probestudium der Physik 2011/12 Karsten Kruse 2. Mechanische Schwingungen und Wellen - Theoretische Betrachtungen 2.1 Der harmonische Oszillator Wir betrachten eine lineare Feder mit der Ruhelänge l 0.
Probestudium der Physik 2011/12 Karsten Kruse 2. Mechanische Schwingungen und Wellen - Theoretische Betrachtungen 2.1 Der harmonische Oszillator Wir betrachten eine lineare Feder mit der Ruhelänge l 0.
2. Physikalisches Pendel
 2. Physikalisches Pendel Ein physikalisches Pendel besteht aus einem starren Körper, der um eine Achse drehbar gelagert ist. A L S φ S z G Prof. Dr. Wandinger 6. Schwingungen Dynamik 2 6.2-1 2.1 Bewegungsgleichung
2. Physikalisches Pendel Ein physikalisches Pendel besteht aus einem starren Körper, der um eine Achse drehbar gelagert ist. A L S φ S z G Prof. Dr. Wandinger 6. Schwingungen Dynamik 2 6.2-1 2.1 Bewegungsgleichung
Anhang A1. Schwingungen. A1.1 Freie Schwingung ohne Dämpfung. A1.2 Freie Schwingung mit Dämpfung PN0907
 Anhang A1 Schwingungen Am Beispiel eines Drehschwingers werden im Folgenden die allgemeinen Eigenschaften schwingfähiger Systeme zusammengestellt und diskutiert. A1.1 Freie Schwingung ohne Dämpfung Idealisierter
Anhang A1 Schwingungen Am Beispiel eines Drehschwingers werden im Folgenden die allgemeinen Eigenschaften schwingfähiger Systeme zusammengestellt und diskutiert. A1.1 Freie Schwingung ohne Dämpfung Idealisierter
(2 π f C ) I eff Z = 25 V
 I eff Z = 25 V") Physik Induktion, Selbstinduktion, Wechselstrom, mechanische Schwingung ösungen 1. Eine Spule mit der Induktivität = 0,20 mh und ein Kondensator der Kapazität C = 30 µf werden in Reihe an eine Wechselspannung
Physik Induktion, Selbstinduktion, Wechselstrom, mechanische Schwingung ösungen 1. Eine Spule mit der Induktivität = 0,20 mh und ein Kondensator der Kapazität C = 30 µf werden in Reihe an eine Wechselspannung
TECHNISCHE MECHANIK III (DYNAMIK)
") Klausur im Fach TECHNISCHE MECHANIK III (DYNAMIK) WS 2014 / 2015 Matrikelnummer: Vorname: Nachname: Ergebnis Klausur Aufgabe: 1 2 3 4 Summe Punkte: 15 7 23 15 60 Davon erreicht Bearbeitungszeit: Hilfsmittel:
Klausur im Fach TECHNISCHE MECHANIK III (DYNAMIK) WS 2014 / 2015 Matrikelnummer: Vorname: Nachname: Ergebnis Klausur Aufgabe: 1 2 3 4 Summe Punkte: 15 7 23 15 60 Davon erreicht Bearbeitungszeit: Hilfsmittel:
Schwingungen & Wellen
 Schwingungen & Wellen 2 2.1 Harmonische Schwingung, Dämpfung, Resonanz I Theorie Schwingungen spielen eine große Rolle in allen Bereichen der Physik. In Uhren sind sie fundamental, in mechanischen Maschinen
Schwingungen & Wellen 2 2.1 Harmonische Schwingung, Dämpfung, Resonanz I Theorie Schwingungen spielen eine große Rolle in allen Bereichen der Physik. In Uhren sind sie fundamental, in mechanischen Maschinen
Einführung in die Physik I. Schwingungen und Wellen 1
 Einführung in die Physik I Schwingungen und Wellen O. von der Lühe und U. Landgraf Schwingungen Periodische Vorgänge spielen in eine große Rolle in vielen Gebieten der Physik E pot Schwingungen treten
Einführung in die Physik I Schwingungen und Wellen O. von der Lühe und U. Landgraf Schwingungen Periodische Vorgänge spielen in eine große Rolle in vielen Gebieten der Physik E pot Schwingungen treten
Modalanalyse am Zweimassenschwinger
 6 A? D E I? D A 7 E L A H I E J J * A H E 4 6 4 6. = K J J 1 1 1 1 I J E J K J B H H A I I K @ ) = C A J A? D E H B, H 1 C 4 E C. =? D C A > E A J A I I K @ 4 A C A K C I J A? D E TU Berlin Sekretariat
6 A? D E I? D A 7 E L A H I E J J * A H E 4 6 4 6. = K J J 1 1 1 1 I J E J K J B H H A I I K @ ) = C A J A? D E H B, H 1 C 4 E C. =? D C A > E A J A I I K @ 4 A C A K C I J A? D E TU Berlin Sekretariat
Praktikum Mikro- und Nanosysteme (Mikrosystemtechnik) Versuch MST7 Dämpfung
 Versuch MST7 Dämpfung") Praktikum Mikro- und Nanosysteme (Mikrosystemtechnik) I. Versuchsvorbereitung Aufgabe 1 Geg.: 2,5, sinusförmige Anregung Versuch MST7 Dämpfung a) Amplituden- und Phasenkennlinien - Schwingfall ( ): Der
Praktikum Mikro- und Nanosysteme (Mikrosystemtechnik) I. Versuchsvorbereitung Aufgabe 1 Geg.: 2,5, sinusförmige Anregung Versuch MST7 Dämpfung a) Amplituden- und Phasenkennlinien - Schwingfall ( ): Der
Kapitel 2 Schwingungen
 Kapitel Schwingungen Mit Schwingungen bzw. Oszillationen bezeichnen wir periodische Bewegungen von Objekten bzw. ganzen Systemen. In diesem Kapitel erweitern wir unsere bisherigen Kenntnisse über den harmonischen
Kapitel Schwingungen Mit Schwingungen bzw. Oszillationen bezeichnen wir periodische Bewegungen von Objekten bzw. ganzen Systemen. In diesem Kapitel erweitern wir unsere bisherigen Kenntnisse über den harmonischen
Erzwungene Schwingung, Resonanz, Selbstgesteuerte Schwingungen
 Aufgaben 19 Resonanz Erzwungene Schwingung, Resonanz, Selbstgesteuerte Schwingungen Lernziele - sich aus dem Studium eines schriftlichen Dokumentes neue Kenntnisse erarbeiten können. - verstehen, was eine
Aufgaben 19 Resonanz Erzwungene Schwingung, Resonanz, Selbstgesteuerte Schwingungen Lernziele - sich aus dem Studium eines schriftlichen Dokumentes neue Kenntnisse erarbeiten können. - verstehen, was eine
AUSWERTUNG: SCHWINGUNGEN, RESONANZVERHALTEN 1. AUFGABE 1
 AUSWERTUNG: SCHWINGUNGEN, RESONANZVERHALTEN TOBIAS FREY & FREYA GNAM, GRUPPE 6, DONNERSTAG 1. AUFGABE 1 An das Winkel-Zeit-Diagramm (Abb. 1) haben wir eine einhüllende e-funktion der Form e = Ae βt angelegt.
AUSWERTUNG: SCHWINGUNGEN, RESONANZVERHALTEN TOBIAS FREY & FREYA GNAM, GRUPPE 6, DONNERSTAG 1. AUFGABE 1 An das Winkel-Zeit-Diagramm (Abb. 1) haben wir eine einhüllende e-funktion der Form e = Ae βt angelegt.
S4 Erzwungene Schwingung Protokoll
 Christian Müller Jan Philipp Dietrich S4 Erzwungene Schwingung Protokoll I. Freie Schwingung a) Erläuterung b) Bestimmung der Eigenkreisfrequenz c) Bestimmung des Dämpfungsmaß β II. Erzwungene Schwingung
Christian Müller Jan Philipp Dietrich S4 Erzwungene Schwingung Protokoll I. Freie Schwingung a) Erläuterung b) Bestimmung der Eigenkreisfrequenz c) Bestimmung des Dämpfungsmaß β II. Erzwungene Schwingung
15.5 Beschreibung von linearen Systemen
 5.5 Beschreibung von linearen Systemen 965 5.5 Beschreibung von linearen Systemen Um das Übertragungsverhalten von Systemen zu bestimmen, untersucht man in der Regelungs- und Systemtechnik den Zusammenhang
5.5 Beschreibung von linearen Systemen 965 5.5 Beschreibung von linearen Systemen Um das Übertragungsverhalten von Systemen zu bestimmen, untersucht man in der Regelungs- und Systemtechnik den Zusammenhang
Erzwungene Schwingungen
 Fachrichtung Physik Physikalisches Grundpraktikum Versuch: ES Erstellt: M. Kauer B. Scholz Aktualisiert: am 28. 06. 2016 Erzwungene Schwingungen Inhaltsverzeichnis 1 Aufgabenstellung 2 2 Theoretische Grundlagen
Fachrichtung Physik Physikalisches Grundpraktikum Versuch: ES Erstellt: M. Kauer B. Scholz Aktualisiert: am 28. 06. 2016 Erzwungene Schwingungen Inhaltsverzeichnis 1 Aufgabenstellung 2 2 Theoretische Grundlagen
A02 Schwingung Resonanz Dämpfung
 A Schwingung Resonanz Dämpfung (A) x t t A Schwingung Resonanz Dämpfung Ziele In diesem Versuch untersuchen Sie Schwingungsphänomene und deren Gesetzmäßigkeiten mit einem Drehschwingsystem ein Beispiel
A Schwingung Resonanz Dämpfung (A) x t t A Schwingung Resonanz Dämpfung Ziele In diesem Versuch untersuchen Sie Schwingungsphänomene und deren Gesetzmäßigkeiten mit einem Drehschwingsystem ein Beispiel
Das führt zu einer periodischen Hin- und Herbewegung (Schwingung) Applet Federpendel (http://www.walter-fendt.de)
 Applet Federpendel (http://www.walter-fendt.de)") Elastische SCHWINGUNGEN (harmonische Bewegung) Eine Masse sei reibungsfrei durch elastische Kräfte in einer Ruhelage fixiert Wenn aus der Ruhelage entfernt wirkt eine rücktreibende Kraft Abb. 7.1 Biologische
Elastische SCHWINGUNGEN (harmonische Bewegung) Eine Masse sei reibungsfrei durch elastische Kräfte in einer Ruhelage fixiert Wenn aus der Ruhelage entfernt wirkt eine rücktreibende Kraft Abb. 7.1 Biologische
4.2 Der Harmonische Oszillator
 Dieter Suter - 208 - Physik B3, SS03 4.2 Der Harmonische Oszillator 4.2.1 Harmonische Schwingungen Die Zeitabhängigkeit einer allgemeinen Schwingung ist beliebig, abgesehen von der Periodizität. Die mathematische
Dieter Suter - 208 - Physik B3, SS03 4.2 Der Harmonische Oszillator 4.2.1 Harmonische Schwingungen Die Zeitabhängigkeit einer allgemeinen Schwingung ist beliebig, abgesehen von der Periodizität. Die mathematische
Digitale Signalverarbeitung Übungsaufgaben
 Kapitel : Einleitung -: Analoger Tiefpass Dieser Tiefpass mit den Werten R = Ω, L =.5mH R L und C =.5µF ist wie folgt zu analysieren: U e C R. Es springe U e bei t =.5ms auf 5V und bei t = ms wieder auf.
Kapitel : Einleitung -: Analoger Tiefpass Dieser Tiefpass mit den Werten R = Ω, L =.5mH R L und C =.5µF ist wie folgt zu analysieren: U e C R. Es springe U e bei t =.5ms auf 5V und bei t = ms wieder auf.
PHYSIK 3 TEIL B: Schwingungen
 E2 / Physik / Schwingungen 1 PHYSIK 3 TEIL B: Schwingungen Berner Fachhochschule Technik und Informatik Elektro - und Kommunikationstechnik E2 / Physik / Schwingungen 2 SCHWINGUNGEN I. Einleitung Die wichtigsten
E2 / Physik / Schwingungen 1 PHYSIK 3 TEIL B: Schwingungen Berner Fachhochschule Technik und Informatik Elektro - und Kommunikationstechnik E2 / Physik / Schwingungen 2 SCHWINGUNGEN I. Einleitung Die wichtigsten
Harmonische Schwingung
 Harmonische Schwingung Eine harmonische Schwingung mit Amplitude c 0, Phasenverschiebung δ und Frequenz ω bzw. Periode T = 2π/ω hat die Form x x(t) = c cos(ωt δ). δ/ω c t T=2π/ω Harmonische Schwingung
Harmonische Schwingung Eine harmonische Schwingung mit Amplitude c 0, Phasenverschiebung δ und Frequenz ω bzw. Periode T = 2π/ω hat die Form x x(t) = c cos(ωt δ). δ/ω c t T=2π/ω Harmonische Schwingung
,Faltung. Heavisidefunktion σ (t), Diracimpuls δ (t) Anwendungen. 1) Rechteckimpuls. 2) Sprungfunktionen. 3) Schaltvorgänge
, Diracimpuls δ (t) Anwendungen. 1) Rechteckimpuls. 2) Sprungfunktionen. 3) Schaltvorgänge") Heavisidefunktion σ (t), Diracimpuls δ (t),faltung Definition Heavisidefunktion, t > 0 σ ( t) = 0, t < 0 Anwendungen ) Rechteckimpuls, t < T r( t) = = σ ( t + T ) σ ( t T ) 0, t > T 2) Sprungfunktionen,
Heavisidefunktion σ (t), Diracimpuls δ (t),faltung Definition Heavisidefunktion, t > 0 σ ( t) = 0, t < 0 Anwendungen ) Rechteckimpuls, t < T r( t) = = σ ( t + T ) σ ( t T ) 0, t > T 2) Sprungfunktionen,
Betrachtetes Systemmodell
 Betrachtetes Systemmodell Wir betrachten ein lineares zeitinvariantes System mit der Impulsantwort h(t), an dessen Eingang das Signal x(t) anliegt. Das Ausgangssignal y(t) ergibt sich dann als das Faltungsprodukt
Betrachtetes Systemmodell Wir betrachten ein lineares zeitinvariantes System mit der Impulsantwort h(t), an dessen Eingang das Signal x(t) anliegt. Das Ausgangssignal y(t) ergibt sich dann als das Faltungsprodukt
Gekoppelte Schwingung
 Versuch: GS Fachrichtung Physik Physikalisches Grundpraktikum Erstellt: C. Blockwitz am 01. 07. 000 Bearbeitet: E. Hieckmann J. Kelling F. Lemke S. Majewsky i.a. Dr. Escher Aktualisiert: am 16. 09. 009
Versuch: GS Fachrichtung Physik Physikalisches Grundpraktikum Erstellt: C. Blockwitz am 01. 07. 000 Bearbeitet: E. Hieckmann J. Kelling F. Lemke S. Majewsky i.a. Dr. Escher Aktualisiert: am 16. 09. 009
Formelzusammenstellung
 Übung zu Mechanik 4 - ormelsammlung Seite 4 ormelzusammenstellung. Grundbegriffe Harmonische Schwingung Sinusschwingung: (t) sin ( t + ϕ) Schwingungsamplitude: Kreisfrequenz: Phasenwinkel: requenz: f Schwingungsdauer,
Übung zu Mechanik 4 - ormelsammlung Seite 4 ormelzusammenstellung. Grundbegriffe Harmonische Schwingung Sinusschwingung: (t) sin ( t + ϕ) Schwingungsamplitude: Kreisfrequenz: Phasenwinkel: requenz: f Schwingungsdauer,
1.4. Stehwellenresonatoren. LEMMA: Resonanz und Güte
 1.4 LEMMA: Resonanz un Güte Stehwellenresonatoren Definition: Koppelt man zwei schwingungsfähige Systeme, inem as eine System (Erreger) as anere System (Resonator) zum Mitschwingen zwingt, kann Resonanz
1.4 LEMMA: Resonanz un Güte Stehwellenresonatoren Definition: Koppelt man zwei schwingungsfähige Systeme, inem as eine System (Erreger) as anere System (Resonator) zum Mitschwingen zwingt, kann Resonanz
SCHWINGUNGEN WELLEN. Schwingungen Resonanz Wellen elektrischer Schwingkreis elektromagnetische Wellen
 Physik für Pharmazeuten SCHWINGUNGEN WELLEN Schwingungen Resonanz elektrischer Schwingkreis elektromagnetische 51 5.1 Schwingungen Federpendel Auslenkung x, Masse m, Federkonstante k H d xt ( ) Bewegungsgleichung:
Physik für Pharmazeuten SCHWINGUNGEN WELLEN Schwingungen Resonanz elektrischer Schwingkreis elektromagnetische 51 5.1 Schwingungen Federpendel Auslenkung x, Masse m, Federkonstante k H d xt ( ) Bewegungsgleichung:
5. Eigenschwingungen
 5. Eigenschwingungen Bei Innenraumproblemen gibt es wie bei elastischen Strukturen Eigenschwingungen. Eigenschwingungen sind rein reelle Lösungen der Helmholtz-Gleichung bei homogenen Randbedingungen.
5. Eigenschwingungen Bei Innenraumproblemen gibt es wie bei elastischen Strukturen Eigenschwingungen. Eigenschwingungen sind rein reelle Lösungen der Helmholtz-Gleichung bei homogenen Randbedingungen.
Schwingungen und Resonanzphänomene
 Schwingungen und Resonanzphänomene oder...... warum Männer am liebsten in der Badewanne und Frauen lieber auf der Toilette singen. Prof. Dr. Christian Schröder Fachbereich Elektrotechnik und Informationstechnik
Schwingungen und Resonanzphänomene oder...... warum Männer am liebsten in der Badewanne und Frauen lieber auf der Toilette singen. Prof. Dr. Christian Schröder Fachbereich Elektrotechnik und Informationstechnik
Versuch e - Lineares Pendel
 UNIVERSITÄT REGENSBURG Naturwissenschaftliche Fakultät II - Physik Anleitung zum Grundlagenpraktikum A für Bachelor of Nanoscience Versuch e - Lineares Pendel 23. überarbeitete Auflage 2011 Dr. Stephan
UNIVERSITÄT REGENSBURG Naturwissenschaftliche Fakultät II - Physik Anleitung zum Grundlagenpraktikum A für Bachelor of Nanoscience Versuch e - Lineares Pendel 23. überarbeitete Auflage 2011 Dr. Stephan
Erzwungene Schwingung, Resonanz, Selbstgesteuerte Schwingungen
 Übung 19 Resonanz Erzwungene Schwingung, Resonanz, Selbstgesteuerte Schwingungen Lernziele - sich aus dem Studium eines schriftlichen Dokumentes neue Kenntnisse erarbeiten können. - verstehen, was eine
Übung 19 Resonanz Erzwungene Schwingung, Resonanz, Selbstgesteuerte Schwingungen Lernziele - sich aus dem Studium eines schriftlichen Dokumentes neue Kenntnisse erarbeiten können. - verstehen, was eine
Aufgabe 1: Elektro-mechanischer Oszillator
 37. Internationale Physik-Olympiade Singapur 6 Lösungen zur zweiten Runde R. Reindl Aufgabe : Elektro-mechanischer Oszillator Formeln zum Plattenkondensator mit der Plattenfläche S, dem Plattenabstand
37. Internationale Physik-Olympiade Singapur 6 Lösungen zur zweiten Runde R. Reindl Aufgabe : Elektro-mechanischer Oszillator Formeln zum Plattenkondensator mit der Plattenfläche S, dem Plattenabstand
P1-12,22 AUSWERTUNG VERSUCH RESONANZ
 P1-12,22 AUSWERTUNG VERSUCH RESONANZ GRUPPE 19 - SASKIA MEIßNER, ARNOLD SEILER 0.1. Drehpendel - Harmonischer Oszillator. Bei dem Drehpendel handelt es sich um einen harmonischen Oszillator. Das Trägheitsmoment,
P1-12,22 AUSWERTUNG VERSUCH RESONANZ GRUPPE 19 - SASKIA MEIßNER, ARNOLD SEILER 0.1. Drehpendel - Harmonischer Oszillator. Bei dem Drehpendel handelt es sich um einen harmonischen Oszillator. Das Trägheitsmoment,
Erzwungene Schwingungen
 In diesem Experiment sollen Sie die grundlegenden Eigenschaften von harmonischen Schwingungen kennenlernen. Dabei ist der ausführliche theoretische Abschnitt nicht nur für diesen Versuch, sondern auch
In diesem Experiment sollen Sie die grundlegenden Eigenschaften von harmonischen Schwingungen kennenlernen. Dabei ist der ausführliche theoretische Abschnitt nicht nur für diesen Versuch, sondern auch
Physikalisches Grundpraktikum Abteilung Mechanik
 M6 Physikalisches Grundpraktikum Abteilung Mechanik Resonanzkurven 1 Vorbereitung Physikalische Größen der Rotationsbewegung, Zusammenhang zwischen Drehmoment, Winkelbeschleunigung und Trägheitsmoment,
M6 Physikalisches Grundpraktikum Abteilung Mechanik Resonanzkurven 1 Vorbereitung Physikalische Größen der Rotationsbewegung, Zusammenhang zwischen Drehmoment, Winkelbeschleunigung und Trägheitsmoment,
Schwingungen und ihre Filterung unter Verwendung von Ergebnissen aus FEM-Rechnungen
 Schwingungen und ihre Filterung unter Verwendung von Ergebnissen aus FEM-Rechnungen AG Qualität im Fachbereich Mathematik Universität Hannover, Welfengarten, D - 3067 Hannover Telephon: +49-5-762-3336
Schwingungen und ihre Filterung unter Verwendung von Ergebnissen aus FEM-Rechnungen AG Qualität im Fachbereich Mathematik Universität Hannover, Welfengarten, D - 3067 Hannover Telephon: +49-5-762-3336
Nachrichtentechnik [NAT] Kapitel 4: Fourier-Transformation. Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik
![Nachrichtentechnik [NAT] Kapitel 4: Fourier-Transformation. Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik](/thumbs/48/24765147.jpg "Nachrichtentechnik [NAT] Kapitel 4: Fourier-Transformation. Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik") Nachrichtentechnik [NAT] Kapitel 4: Fourier-Transformation Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik Sommersemester 25 Inhaltsverzeichnis Inhalt Inhaltsverzeichnis 4 Fourier-Transformation 3
Nachrichtentechnik [NAT] Kapitel 4: Fourier-Transformation Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik Sommersemester 25 Inhaltsverzeichnis Inhalt Inhaltsverzeichnis 4 Fourier-Transformation 3
1 Wechselstromwiderstände
 1 Wechselstromwiderstände Wirkwiderstand Ein Wirkwiderstand ist ein ohmscher Widerstand an einem Wechselstromkreis. Er lässt keine zeitliche Verzögerung zwischen Strom und Spannung entstehen, daher liegt
1 Wechselstromwiderstände Wirkwiderstand Ein Wirkwiderstand ist ein ohmscher Widerstand an einem Wechselstromkreis. Er lässt keine zeitliche Verzögerung zwischen Strom und Spannung entstehen, daher liegt
Differentialgleichung.
 Kapitel 9 Differentialgleichungen 9. Einteilung der Differentialgleichungen In einer Differentialgleichung (DGl) treten Differentialquotienten von einer oder ehreren Funtionen von einer oder ehreren Veränderlichen
Kapitel 9 Differentialgleichungen 9. Einteilung der Differentialgleichungen In einer Differentialgleichung (DGl) treten Differentialquotienten von einer oder ehreren Funtionen von einer oder ehreren Veränderlichen
Anfänger-Praktikum I WS 11/12. Michael Seidling Timo Raab. Praktikumsbericht: Gekoppelte Pendel
 Anfänger-Praktikum I WS 11/1 Michael Seidling Timo Raab Praktikumsbericht: Gekoppelte Pendel 1 Inhaltsverzeichnis Inhaltsverzeichnis I. Einführung 4 II. Grundlagen 4 1. Harmonische Schwingung 4. Gekoppelte
Anfänger-Praktikum I WS 11/1 Michael Seidling Timo Raab Praktikumsbericht: Gekoppelte Pendel 1 Inhaltsverzeichnis Inhaltsverzeichnis I. Einführung 4 II. Grundlagen 4 1. Harmonische Schwingung 4. Gekoppelte
Beispiel: Erzwungene gedämpfte Schwingungen
 Lineare Dgln. mit konstanten Koeffizienten Zur Startseite TM-Mathe Gewöhnliche Dgln. (Grundlagen) Differenzialgleichungen 1. Ordnung Lineare Dgln. mit konstanten Koeffizienten Lineare Differenzialgleichungen
Lineare Dgln. mit konstanten Koeffizienten Zur Startseite TM-Mathe Gewöhnliche Dgln. (Grundlagen) Differenzialgleichungen 1. Ordnung Lineare Dgln. mit konstanten Koeffizienten Lineare Differenzialgleichungen
Konvergenz und Stetigkeit
 Mathematik I für Biologen, Geowissenschaftler und Geoökologen 12. Dezember 2007 Konvergenz Definition Fourierreihen Obertöne Geometrische Reihe Definition: Eine Funktion f : D R d heißt beschränkt, wenn
Mathematik I für Biologen, Geowissenschaftler und Geoökologen 12. Dezember 2007 Konvergenz Definition Fourierreihen Obertöne Geometrische Reihe Definition: Eine Funktion f : D R d heißt beschränkt, wenn
10. Vorlesung EP I. Mechanik 7. Schwingungen (freie, gedämpfte und erzwungene Schwingung, Resonanz, Schwebung)
") 10. Vorlesung EP I. Mechanik 7. Schwingungen (freie, gedämpfte und erzwungene Schwingung, Resonanz, Schwebung) Versuche: Pendel mit zwei Längen Sandpendel ohne/mit Dämpfung erzwungene Schwingung mit ω
10. Vorlesung EP I. Mechanik 7. Schwingungen (freie, gedämpfte und erzwungene Schwingung, Resonanz, Schwebung) Versuche: Pendel mit zwei Längen Sandpendel ohne/mit Dämpfung erzwungene Schwingung mit ω
Erzwungene Schwingungen und Resonanzphänomene
 Agenda Erzwungene Schwingungen und Resonanzphänomene oder...... warum Männer am liebsten in der Badewanne und Frauen lieber auf der Toilette singen. Dr. Christian Schröder Schwingungen: Freund oder Feind?
Agenda Erzwungene Schwingungen und Resonanzphänomene oder...... warum Männer am liebsten in der Badewanne und Frauen lieber auf der Toilette singen. Dr. Christian Schröder Schwingungen: Freund oder Feind?
Allgemeine Mechanik Musterlo sung 5.
 Allgemeine Mechanik Musterlo sung 5 U bung HS 203 Prof R Renner Gekoppelte Pendel Wir betrachten ein System aus zwei gleichen mathematischen Pendeln der La nge l = l2 = l mit Massen m = m2 = m im Schwerefeld
Allgemeine Mechanik Musterlo sung 5 U bung HS 203 Prof R Renner Gekoppelte Pendel Wir betrachten ein System aus zwei gleichen mathematischen Pendeln der La nge l = l2 = l mit Massen m = m2 = m im Schwerefeld
Übungen zu Physik 1 für Maschinenwesen
 Physikdepartent E13 WS 011/1 Übungen zu Physik 1 für Maschinenwesen Prof. Dr. Peter Müller-Buschbau, Dr. Eva M. Herzig, Dr. Volker Körstgens, David Magerl, Markus Schindler, Moritz v. Sivers Vorlesung
Physikdepartent E13 WS 011/1 Übungen zu Physik 1 für Maschinenwesen Prof. Dr. Peter Müller-Buschbau, Dr. Eva M. Herzig, Dr. Volker Körstgens, David Magerl, Markus Schindler, Moritz v. Sivers Vorlesung