Klaus Mechelke. Prüfverfahren für terrestrische Laserscanner an der HCU Hamburg
|
|
|
- Dominik Schneider
- vor 6 Jahren
- Abrufe
Transkript

1 Klaus Mechelke Prüfverfahren für terrestrische Laserscanner an der HCU Hamburg
2 Inhalt der Präsentation Einführung 3D-Testfeld Kenngrößenbestimmung Streckenmessgenauigkeit Fazit
 und Kern (2008) Feldprüfverfahren nach Gottwald/Tüxsen (2008), Wehmann")
3 Einführung Keine Standards für Untersuchungs- & Prüfverfahren VDI/VDE 2634, Bl. II und III Kenngrößenbestimmung nach Heister (2006) und Kern (2008) Feldprüfverfahren nach Gottwald/Tüxsen (2008), Wehmann (2008) HCU: Genauigkeitsuntersuchungen seit 2004


4 3D-Testfeld Untersuchung 3D-Genauigkeit in Anlehnung an VDI/VDE 2634 Bl. 3 Bestimmung diverser Kenngrößen nach Heister und Kern Testfeld in Halle D: Messvolumen 30x20x2m 3, d = 3,3m bis 32,0m Testfeld mit bis zu 53 Referenzpunkten, 3D-Genauigkeit <mm

 Berechnung der Strecken zwischen den Referenzpunkten")
 gemäß VDI/VDE 2634 III - Differenzen = Winkel-")
5 3D-Testfeld Scanning von Kugeln (99mm) & Targets mit div. Scannern auf 5 Standpunkten auf verschiedenen Ebenen Registrierung der Scannerstandpunkte mit RealWorks Survey (Transformation in ein gemeinsames lokales Koordinatensystem) Berechnung der Strecken zwischen den Referenzpunkten in allen Kombinationen im Scanner- und im Referenzsystem (korreliert) 3D-Streckenvergleich (Soll/Ist) gemäß VDI/VDE 2634 III - Differenzen = Winkel- und Streckenmessfehler, Kugel-Fitting, Zentrierfehler
6 3D-Testfeld Soll-Ist Vergleich der Raumstrecken zwischen den Referenzpunkten, alle Stationen registriert, alle Strecken verwendet Scanner # 3D-Punkte # Strecken l min l max Spanne Shift Riegl VZ 400 Kugeln , 4,4 5,5-5,4 Riegl VZ 400 Targets ,5 4,8 8,3,0 IMAGER 5006i Kugeln ,3 5,4 8,7 0,5 Leica C0 Kugeln ,6 6, 9,7 0,8 Häufigkeit Riegl VZ400 Kugeln Riegl VZ400 Targets Imager 5006i Leica C Differenzen [mm]


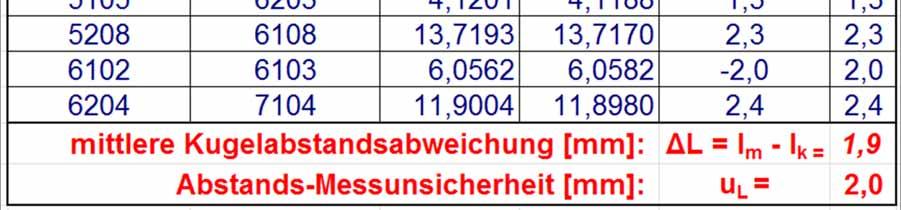
7 3D-Testfeld Auswertung nach VDI/VDE 2634 Mittlere Kugelabstandsabweichung Δ 7 L i = Δ L 7 j = j Abstands-Messunsicherheit u L = 7 j= ΔL 7 2 j

8 3D-Testfeld Auswertung nach VDI/VDE 2634

![min [mm] l max [mm] Spanne [mm] 200 Leica C0 99](/docs-images/74/70771707/images/9-3.jpg "28 378-3,6 6, 9,7 0/2007 Leica ScanStation 99 29")

9 3D-Testfeld Vergleich zu den Ergebnissen 2007 und 2008 Scanner Kugel Ø [mm] # Kugeln # Strecken l min [mm] l max [mm] Spanne [mm] 200 Leica C ,6 6, 9,7 0/2007 Leica ScanStation ,4 6,5,9 0/2007 Leica ScanStation ,4 6,5,9 04/2007 Leica ScanStation ,3 9,2,5

![[mm] Spanne [mm] 200 ZF IMAGER 5006i 99 28 378-3,3 5,4](/docs-images/74/70771707/images/10-3.jpg "8,7 09/2008 ZF IMAGER 5006 99 3 465-5,8 0,3 6, 0/2007")

10 3D-Testfeld Vergleich zu den Ergebnissen 2007 und 2008 Scanner Kugel Ø [mm] # Kugeln # Strecken l min [mm] l max [mm] Spanne [mm] 200 ZF IMAGER 5006i ,3 5,4 8,7 09/2008 ZF IMAGER ,8 0,3 6, 0/2007 Leica HDS ,7 6,3 3,0 0/2007 ZF IMAGER ,7 7,7 3,4 04/2007 ZF IMAGER ,4 6,6 4,0
11 Kenngrößenbestimmung Mittlere Kugelabstandsabweichung ΔL (Heister 2006) als Maßtreue, Überprüfung der Rückführbarkeit auf Längennormal 7 ΔL i = ΔL j 7 j= ist ΔList soll soll ΔLsoll ist Ausgleichende Kugel mit festem Radius
12 Kenngrößenbestimmung Kugelfitting in RealWorks Survey mit festem Radius Kugelkoordinaten nach Registrierung im ersten Scannerkoordinatensystem & Mittelbildung aller Kugelzentren eines Punktes Mittlere Kugelabstandsabweichung ΔL (Heister 2006) 7 ΔL i = ΔL j 7 ΔL : Mittel aus 4 Stationen, stationsweise berechnet, 7 Strecken ΔL 2 : Alle 4 Stationen registriert, 7 Strecken ΔL 3 : Alle 4 Stationen registriert, alle Strecken j= Scanner Kampagne ΔL [mm] ΔL 2 [mm] ΔL 3 [mm] # Strecken Riegl VZ 400 (Reflex-Targets) 200,3 0,8,4 35 IMAGER 5006i (Kugel) 200,6,2,2 378 Leica C0 (Kugel) 200,5,3,3 378
13 Kenngrößenbestimmung ΔL durch Berechnung einer 6-Parameter-Transformation der Kugelmittelpunkte auf die Sollpositionen (Kern 2008) Voraussetzung: Sollkoordinaten aus Netzmessung bekannt Scanner Kampagne # Kugeln ΔL [mm] ΔL 2 [mm] # Stationen Riegl VZ 400 (Reflex-Targets) ,7 0,5 5 IMAGER 5006i ,9 0,6 6 Leica C ,7 0,5 6 ΔL : Mittel aus allen Stationen, stationsweise berechnet ΔL 2 : alle Stationen registriert
14 Kenngrößenbestimmung Abstandsmessunsicherheit u L (Heister 2006) als Bestimmungsgüte u L = 7 j= ΔL 7 2 j Scanner Kampagne ul [mm] ul 2 [mm] ul 3 [mm] # Strecken Riegl VZ 400 (Reflex-Targets) 200,7,0,7 35 IMAGER 5006i (Kugel) 200 2,0,5,6 378 Leica C0 (Kugel) 200,8,5,7 378 u L : Mittel aus 4 Stationen, stationsweise berechnet, 7 Strecken u L2 : Alle 4 Stationen registriert, 7 Strecken u L3 : Alle 4 Stationen registriert, alle Strecken
15 Kenngrößenbestimmung Kugelradiusabweichung (Kern 2008) als Mittelwert der Differenzen zwischen geschätztem und Sollradius von k Kugeln soll v ist soll v2 ist ist v3 soll ist v4 soll R = k K v i k i=
16 Kenngrößenbestimmung Scanner Kampagne # Kugeln Δr min [mm] Δr max [mm] ØΔr [mm] # Punkte Ø Faro Photon ,7 5,2, IMAGER 5006i ,8 0, -0, Leica C ,9 0,2-0, Δr = soll - ist Kugelradiusabweichung [mm] Kugelradiusabweichung (Kern 2008) Station im 3D Testfeld Faro Photon Imager 5006i Leica C0 d=99mm -3 Anzahl Punkte auf der Kugel
17 Kenngrößenbestimmung Mittlere Antastabweichung (Heister 2006) als Spanne des Abstandes zum ausgeglichenen Formelement R = n n i= r i Ausgleichende Kugel mit unbekanntem Radius r2 Radiale Abweichungen für alle Messpunkte aller Kugeln r

18 Kenngrößenbestimmung Antastabweichung (Kern 2008) als Beschreibung des zu erwartenden Rauschens auf der Objektoberfläche R = n n i= 2 r i r2 Ausgleichende Kugel mit unbekanntem Radius Radiale Abweichungen für alle Messpunkte aller Kugeln r
19 Kenngrößenbestimmung Antast-Messunsicherheit (Heister 2006) als Mittelwert der Standardabweichungen der geschätzten Radien der ausgeglichenen Kugeln u R = 0 j = s 0 2 Rj Ausgleichende Kugel mit unbekanntem Radius
20 Kenngrößenbestimmung R = n n i= r i u R = 0 j = s 0 2 Rj R = n n i= 2 r i Scanner Mittlere Antastabweichung (Heister) Antast- Messunsicherheit (Heister) Antastabweichung (Kern) Riegl VZ 400 0,8,, Faro Photon 20 0,9,3,2 IMAGER 5006i 0,3 0,6 0,5 Leica C0,2,4,6
21 Kenngrößenbestimmung Antast-Messunsicherheit (Heister) Antast-Messunsicherheit u 2,00,50,00 0,50 0,00 IMAGER 5006i Punktanzahl Antast-Messunsicherheit u [mm] 2,00,50,00 0,50 Riegl VZ-400 0, Punktanzahl Antast-Messunsicherheit u 2,00,50,00 0,50 0,00 Faro Photon Punktanzahl Antast-Messunsicherheit u [mm] 2,5 0,5 Leica C Punktanzahl



 Kugelfitting mit")
22 Streckenmessgenauigkeit 20m-Prüfstrecke auf Komparatorbahn Zielzeichen für Scanner: Kugeln & Targets im Abstand - 20m Vergleich zu Referenzstrecken (Leica TM30) Kugelfitting mit bekanntem Radius in RealWorks Survey
23 Streckenmessgenauigkeit Sollstreckenvergleich auf 20m-Komparatorbahn



24 Streckenmessgenauigkeit Vergleichsstrecke Friedhof Ohlsdorf (7 Messpfeiler) Streckenlängen bis 430m, m in 0m-Intervallen Referenzmessung mit Leica TM30 Einsatz verschiedener Targets Kugelfitting in RealWorks Survey mit bekanntem Radius
25 Streckenmessgenauigkeit Vergleichsstrecke Friedhof Ohlsdorf Hersteller-Spezifikation (Strecke): +/- 4mm im Bereich 50m, Reichweite Albedo HDS-Target HCU-Kugel 99mm

26 Streckenmessgenauigkeit Faro Photon 20 Scaneinstellung: Auflösung / Qualität 4 20m 285 pts 30m 235 pts 40m 70 pts 50m 444 pts 60m 30 pts 70m 96 pts 80m 39 pts 90m pts 00m 84 pts 0m 58 pts 0,0 Standardabweichung Kugelfitting 8,0 Stdabw. [mm] 6,0 4,0 2,0 0, Position Differenz [mm] Differenzen zur Sollstrecke Strecke [m]
27 Schlussfolgerungen / Ausblick Viele Kenngrößen aber noch keine Standards Kenngrößen (Zahlen) versus Erfahrung (Praxis) Realitätsnahe praktische Bedingungen (Messvolumen) Wichtig: Untersuchung des Gesamtsystems (HW/SW) (Labor)Untersuchung versus Feldprüfverfahren Kalibrierung Herstellersache!?



28 Vielen Dank für Ihre Aufmerksamkeit
Vergleichende Genauigkeitsuntersuchungen der neuesten Generation terrestrischer Laserscanner
 Klaus Mechelke, Thomas Kersten, Maren Lindstaedt Vergleichende Genauigkeitsuntersuchungen der neuesten Generation terrestrischer Laserscanner Überblick Einführung Untersuchte Systeme Geometrische Untersuchungen
Klaus Mechelke, Thomas Kersten, Maren Lindstaedt Vergleichende Genauigkeitsuntersuchungen der neuesten Generation terrestrischer Laserscanner Überblick Einführung Untersuchte Systeme Geometrische Untersuchungen
Prüfverfahren für terrestrische Laserscanner Gemeinsame geometrische Genauigkeitsuntersuchungen verschiedener Laserscanner an der HCU Hamburg
 Photogrammetrie, Laserscanning, Optische 3D-Messtechnik - Beiträge der Oldenburger 3D-Tage 2012, Th. Luhmann/Ch. Müller (Hrsg.), Wichmann, VDE Verlag GmbH, Berlin und Offenbach, pp. 264-275. Prüfverfahren
Photogrammetrie, Laserscanning, Optische 3D-Messtechnik - Beiträge der Oldenburger 3D-Tage 2012, Th. Luhmann/Ch. Müller (Hrsg.), Wichmann, VDE Verlag GmbH, Berlin und Offenbach, pp. 264-275. Prüfverfahren
Systemkriterien, -fehler & Genauigkeitsuntersuchungen Critères et Erreur de système, Études de précision
 Thomas P. Kersten Terrestrische Laserscanner Scanners de laser terrestres Systemkriterien, -fehler & Genauigkeitsuntersuchungen Critères et Erreur de système, Études de précision 1 / 73 Mesure électronique
Thomas P. Kersten Terrestrische Laserscanner Scanners de laser terrestres Systemkriterien, -fehler & Genauigkeitsuntersuchungen Critères et Erreur de système, Études de précision 1 / 73 Mesure électronique
Untersuchungen zu geeigneten Feldverfahren zur Überprüfung Terrestrischer Laserscanner
 Untersuchungen zu geeigneten Feldverfahren zur Überprüfung Terrestrischer Laserscanner Prof. Dr.-Ing. Wolffried Wehmann, HTW Dresden, FB Vermessungswesen/Kartographie 1 Prüfungen Terrestrischer Laserscanner
Untersuchungen zu geeigneten Feldverfahren zur Überprüfung Terrestrischer Laserscanner Prof. Dr.-Ing. Wolffried Wehmann, HTW Dresden, FB Vermessungswesen/Kartographie 1 Prüfungen Terrestrischer Laserscanner
Ein automatisches Monitoringsystem für Buhnen an der Elbe durch TLS
 HCU HafenCity Universität Hamburg Universität für Baukunst und Metropolenentwicklung HAMBURGS NEUE UNIVERSITÄT Europas erste Universität für die bebaute Umwelt Felix Tschirschwitz, Klaus Mechelke, Hanne
HCU HafenCity Universität Hamburg Universität für Baukunst und Metropolenentwicklung HAMBURGS NEUE UNIVERSITÄT Europas erste Universität für die bebaute Umwelt Felix Tschirschwitz, Klaus Mechelke, Hanne
Auswahlkriterien für terrestrische Laserscanner
 2. Hamburger Anwenderforum Terrestrisches Laserscanning Hafen City Universität Hamburg 14.6.2007 Auswahlkriterien für terrestrische Laserscanner von Rudolf Staiger Fachhochschule Bochum Inhalte 1. Einleitung
2. Hamburger Anwenderforum Terrestrisches Laserscanning Hafen City Universität Hamburg 14.6.2007 Auswahlkriterien für terrestrische Laserscanner von Rudolf Staiger Fachhochschule Bochum Inhalte 1. Einleitung
Untersuchung von Registrierungsverfahren hinsichtlich des Einsatzes terrestrischer Laserscanner in der Deformationsmessung
 Untersuchung von Registrierungsverfahren hinsichtlich des Einsatzes terrestrischer Laserscanner in der Deformationsmessung Frank NEITZEL, Waldemar MORDWINZEW und Christian LERCHE Zusammenfassung Nach einer
Untersuchung von Registrierungsverfahren hinsichtlich des Einsatzes terrestrischer Laserscanner in der Deformationsmessung Frank NEITZEL, Waldemar MORDWINZEW und Christian LERCHE Zusammenfassung Nach einer
Untersuchung von Registrierungsverfahren hinsichtlich des Einsatzes terrestrischer Laserscanner in der Deformationsmessung
 Frank Neitzel, Waldemar Mordwinzew und Christian Lerche Untersuchung von Registrierungsverfahren hinsichtlich des Einsatzes terrestrischer Laserscanner in der Deformationsmessung Nach einer Einführung
Frank Neitzel, Waldemar Mordwinzew und Christian Lerche Untersuchung von Registrierungsverfahren hinsichtlich des Einsatzes terrestrischer Laserscanner in der Deformationsmessung Nach einer Einführung
Präzise Oberflächenerfassung mit einem Messarm
 Dipl.-Ing. Christoph Naab 08. Oktober 2014, INTERGEO, Geodätische Woche 2014, Berlin G E O D Ä T I S C H E S I N S T I T U T ( G I K ) KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum
Dipl.-Ing. Christoph Naab 08. Oktober 2014, INTERGEO, Geodätische Woche 2014, Berlin G E O D Ä T I S C H E S I N S T I T U T ( G I K ) KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum
Annahmeprüfung und Bestätigungsprüfung für Koordinatenmessgeräte. Eine kurze Einführung.
 Annahmeprüfung und Bestätigungsprüfung für Koordinatenmessgeräte. Eine kurze Einführung. ISO 10360 Annahmeprüfung und Bestätigungsprüfung für Koordinatenmessgeräte (KMG) bestehend aus: ISO 10360-1 (2000):
Annahmeprüfung und Bestätigungsprüfung für Koordinatenmessgeräte. Eine kurze Einführung. ISO 10360 Annahmeprüfung und Bestätigungsprüfung für Koordinatenmessgeräte (KMG) bestehend aus: ISO 10360-1 (2000):
Aktueller Stand zur Prüfung und zum Qualitätsnachweis. von terrestrischen Laserscannern (TLS)
") Aktueller Stand zur Prüfung und zum Qualitätsnachweis von terrestrischen Laserscannern (TLS) von Prof. Dr.-Ing. Fredie Kern Qualitätssicherung geodätischer Instrumente im Messeinsatz VDV-Seminar 109 Fulda
Aktueller Stand zur Prüfung und zum Qualitätsnachweis von terrestrischen Laserscannern (TLS) von Prof. Dr.-Ing. Fredie Kern Qualitätssicherung geodätischer Instrumente im Messeinsatz VDV-Seminar 109 Fulda
Terrestrisches Laserscanning Ein allgemeiner Überblick über Messmethoden und Einsatzmöglichkeiten in der Geomatik. Hans-Martin Zogg, ETH Zürich
 Terrestrisches Laserscanning Ein allgemeiner Überblick über Messmethoden und Einsatzmöglichkeiten in der Geomatik Hans-Martin Zogg, ETH Zürich 2 Inhalt Terrestrisches Laserscanning Klassifizierung von
Terrestrisches Laserscanning Ein allgemeiner Überblick über Messmethoden und Einsatzmöglichkeiten in der Geomatik Hans-Martin Zogg, ETH Zürich 2 Inhalt Terrestrisches Laserscanning Klassifizierung von
3D-Erfassung, Modellierung & Visualisierung des Kaiserdoms zu Königslutter durch terrestrisches Laserscanning 1/ 30
 Th. Kersten, M. Lindstaedt & K. Mechelke 3D-Erfassung, Modellierung & Visualisierung des Kaiserdoms zu Königslutter durch terrestrisches Laserscanning 1/ 30 4. er Anwenderforum für Terrestrisches Laserscanning
Th. Kersten, M. Lindstaedt & K. Mechelke 3D-Erfassung, Modellierung & Visualisierung des Kaiserdoms zu Königslutter durch terrestrisches Laserscanning 1/ 30 4. er Anwenderforum für Terrestrisches Laserscanning
Automatische Verfahren zur Verknüpfung von Punktwolken
 Automatische Verfahren zur Verknüpfung von Punktwolken Dr.-Ing. Christian Hesse 16.06.2009 3. Hamburger Anwenderforum Terrestrisches Laserscanning 1 Inhalt Einleitung Ansätze zur automatischen Registrierung
Automatische Verfahren zur Verknüpfung von Punktwolken Dr.-Ing. Christian Hesse 16.06.2009 3. Hamburger Anwenderforum Terrestrisches Laserscanning 1 Inhalt Einleitung Ansätze zur automatischen Registrierung
Carl-Engler-Schule Karlsruhe Physik-Labor (BS/BK/FS) 1 (5)
 1 (5)") Carl-Engler-Schule Karlsruhe Physik-Labor (BS/BK/FS) (5) Laborversuch: Bessel-Verfahren. Grundlagen Bei der Bestimmung der Brennweite einer Sammellinse lassen sich die Gegenstands- und Bildweite direkt
Carl-Engler-Schule Karlsruhe Physik-Labor (BS/BK/FS) (5) Laborversuch: Bessel-Verfahren. Grundlagen Bei der Bestimmung der Brennweite einer Sammellinse lassen sich die Gegenstands- und Bildweite direkt
Inhalt. Einleitung. Hydrographische Vermessungen mit der Level-A. Kinematisches Laserscanning. Realisierung eines Prototypen
 Kinematische TLS Messungen auf dem Vermessungsboot Level-A M. Sc. Friedrich Keller, dhp:i Dr.-Ing. Christian Hesse, dhp:i Prof. Dr.-Ing. Volker Böder, HCU Dipl.-Ing. Arne Sauer, NIAH 1 Inhalt Einleitung
Kinematische TLS Messungen auf dem Vermessungsboot Level-A M. Sc. Friedrich Keller, dhp:i Dr.-Ing. Christian Hesse, dhp:i Prof. Dr.-Ing. Volker Böder, HCU Dipl.-Ing. Arne Sauer, NIAH 1 Inhalt Einleitung
Prüfrichtlinie zur Abnahme und Überwachung von Terrestrischen Laserscanner-Systemen - ENTWURF V
 Prüfrichtlinie zur Abnahme und Überwachung von Terrestrischen Laserscanner-Systemen - ENTWURF V.0. - von Prof. Dr.-Ing. Fredie Kern Institut für Raumbezogene Informations- und Messtechnik Lucy-Hillebrand-Straße
Prüfrichtlinie zur Abnahme und Überwachung von Terrestrischen Laserscanner-Systemen - ENTWURF V.0. - von Prof. Dr.-Ing. Fredie Kern Institut für Raumbezogene Informations- und Messtechnik Lucy-Hillebrand-Straße
LK Lorentzkraft. Inhaltsverzeichnis. Moritz Stoll, Marcel Schmittfull (Gruppe 2) 25. April Einführung 2
 25. April Einführung 2") LK Lorentzkraft Blockpraktikum Frühjahr 2007 (Gruppe 2) 25. April 2007 Inhaltsverzeichnis 1 Einführung 2 2 Theoretische Grundlagen 2 2.1 Magnetfeld dünner Leiter und Spulen......... 2 2.2 Lorentzkraft........................
LK Lorentzkraft Blockpraktikum Frühjahr 2007 (Gruppe 2) 25. April 2007 Inhaltsverzeichnis 1 Einführung 2 2 Theoretische Grundlagen 2 2.1 Magnetfeld dünner Leiter und Spulen......... 2 2.2 Lorentzkraft........................
Anlage zur Akkreditierungsurkunde D-K nach DIN EN ISO/IEC 17025:2005
 Deutsche Akkreditierungsstelle GmbH Anlage zur Akkreditierungsurkunde D-K-18311-01-00 nach DIN EN ISO/IEC 17025:2005 Gültigkeitsdauer: 08.05.2014 bis 30.01.2018 Ausstellungsdatum: 08.05.2014 Urkundeninhaber:
Deutsche Akkreditierungsstelle GmbH Anlage zur Akkreditierungsurkunde D-K-18311-01-00 nach DIN EN ISO/IEC 17025:2005 Gültigkeitsdauer: 08.05.2014 bis 30.01.2018 Ausstellungsdatum: 08.05.2014 Urkundeninhaber:
Anlage zur Akkreditierungsurkunde D-K nach DIN EN ISO/IEC 17025:2005
 Deutsche Akkreditierungsstelle GmbH Anlage zur Akkreditierungsurkunde D-K-18311-01-00 nach DIN EN ISO/IEC 17025:2005 Gültigkeitsdauer: 27.04.2016 bis 30.01.2018 Ausstellungsdatum: 27.04.2016 Urkundeninhaber:
Deutsche Akkreditierungsstelle GmbH Anlage zur Akkreditierungsurkunde D-K-18311-01-00 nach DIN EN ISO/IEC 17025:2005 Gültigkeitsdauer: 27.04.2016 bis 30.01.2018 Ausstellungsdatum: 27.04.2016 Urkundeninhaber:
TLS-Prüfung Protokoll der Sitzung vom 02.09.2008 in Bochum
 TLS-Prüfung Prtkll der Sitzung vm 02.09.2008 in Bchum TOP 1 Einführende Wrte durch Dekan Fitzen Vrstellung der TO durch RS, keine Änderungswünsche Prtklle / Vrträge werden zeitnah auf der Website www.laserscanning.rg
TLS-Prüfung Prtkll der Sitzung vm 02.09.2008 in Bchum TOP 1 Einführende Wrte durch Dekan Fitzen Vrstellung der TO durch RS, keine Änderungswünsche Prtklle / Vrträge werden zeitnah auf der Website www.laserscanning.rg
Grenzwert für NV 2.0 Grenzwert der Kontrollierbarkeit EV 10 % Zieleinstellfehler m Anzahl der zu rechnenden Iterationen 9 Auffelderung
 F Nachweis über die Qualität der Messung 1 von (4) Freie Ausgleichung Ausgleichungsmodell Programm Benutztes Rechenprogramm WinKAFKA Version 7.0.3 Name und Stand der Auftragsdatei Name: Gebeinmessung S1.kpf
F Nachweis über die Qualität der Messung 1 von (4) Freie Ausgleichung Ausgleichungsmodell Programm Benutztes Rechenprogramm WinKAFKA Version 7.0.3 Name und Stand der Auftragsdatei Name: Gebeinmessung S1.kpf
Konfidenzintervalle Grundlegendes Prinzip Erwartungswert Bekannte Varianz Unbekannte Varianz Anteilswert Differenzen von Erwartungswert Anteilswert
 Konfidenzintervalle Grundlegendes Prinzip Erwartungswert Bekannte Varianz Unbekannte Varianz Anteilswert Differenzen von Erwartungswert Anteilswert Beispiel für Konfidenzintervall Im Prinzip haben wir
Konfidenzintervalle Grundlegendes Prinzip Erwartungswert Bekannte Varianz Unbekannte Varianz Anteilswert Differenzen von Erwartungswert Anteilswert Beispiel für Konfidenzintervall Im Prinzip haben wir
Vorschlag für eine kennwertorientierte TLS-Prüfung
 Vorschlag für eine kennwertorientierte TLS-Prüfung von Prof. Dr.-Ing. Fredie Kern 3. Hamburger Anwenderforum Terrestrisches Laserscanning Hamburg 16.06.2009 LEHREINHEIT GEOINFORMATIK UND VERMESSUNG kern@geoinform.fh-mainz.de
Vorschlag für eine kennwertorientierte TLS-Prüfung von Prof. Dr.-Ing. Fredie Kern 3. Hamburger Anwenderforum Terrestrisches Laserscanning Hamburg 16.06.2009 LEHREINHEIT GEOINFORMATIK UND VERMESSUNG kern@geoinform.fh-mainz.de
Thema 6 Reflektorlose Messungen und Laserscanning Möglichkeiten und Grenzen
 Thema 6 Reflektorlose Messungen und Laserscanning Möglichkeiten und Grenzen Einige Punkte über Totale Station Total Station - Reflektorlossmessungen Pointeur laser Mesure de distance Zeiger : roter Laser
Thema 6 Reflektorlose Messungen und Laserscanning Möglichkeiten und Grenzen Einige Punkte über Totale Station Total Station - Reflektorlossmessungen Pointeur laser Mesure de distance Zeiger : roter Laser
Baugeschichtliche 3D-Dokumentation des Alt- Segeberger Bürgerhauses durch Photogrammetrie und terrestrisches Laserscanning
 Denkmäler3.de Zeche Zollern, Dortmund 16.-18. Oktober 2013 Thomas P. Kersten, Nils Hinrichsen, Maren Lindstaedt, Christoph Weber, Kristin Schreyer & Felix Tschirschwitz Baugeschichtliche 3D-Dokumentation
Denkmäler3.de Zeche Zollern, Dortmund 16.-18. Oktober 2013 Thomas P. Kersten, Nils Hinrichsen, Maren Lindstaedt, Christoph Weber, Kristin Schreyer & Felix Tschirschwitz Baugeschichtliche 3D-Dokumentation
Vergleichende Untersuchung zur Genauigkeit und Auflösung verschiedener Scanner
 Vergleichende Untersuchung zur Genauigkeit und Auflösung verschiedener Scanner Wolfgang BÖHLER und Andreas MARBS Zusammenfassung Laserscanner liefern 3D-Koordinaten, deren Zustandekommen aufgrund des Black-Box
Vergleichende Untersuchung zur Genauigkeit und Auflösung verschiedener Scanner Wolfgang BÖHLER und Andreas MARBS Zusammenfassung Laserscanner liefern 3D-Koordinaten, deren Zustandekommen aufgrund des Black-Box
Kalibrierung als Grundlage für sichere Prüfergebnisse
 Prüfen mit Verstand Kalibrierung als Grundlage für sichere Prüfergebnisse Stephan Baumann Oktober 2016 Kalibrierung Das internationale Wörterbuch der Metrologie definiert Kalibrierung sehr präzise. Kalibrierung:
Prüfen mit Verstand Kalibrierung als Grundlage für sichere Prüfergebnisse Stephan Baumann Oktober 2016 Kalibrierung Das internationale Wörterbuch der Metrologie definiert Kalibrierung sehr präzise. Kalibrierung:
Messunsicherheitsbeiträge in der Längenmesstechnik
 Messunsicherheitsbeiträge in der Längenmesstechnik MELUTEC Metrology GmbH Martin Herold Helmholtzstraße 11 D-71573 Allmersbach im Tal martin.herold@melutec.de Überblick Folgende Beiträge in der Längenmesstechnik
Messunsicherheitsbeiträge in der Längenmesstechnik MELUTEC Metrology GmbH Martin Herold Helmholtzstraße 11 D-71573 Allmersbach im Tal martin.herold@melutec.de Überblick Folgende Beiträge in der Längenmesstechnik
3D Planungs- und Montagesicherheit im Anlagenbau ein Einsatzgebiet für Laserscanning?
 4. HAMBURGER ANWENDERFORUM TERRESTRISCHES LASERSCANNING 23. Juni 2011 3D Planungs- und Montagesicherheit im Anlagenbau ein Einsatzgebiet für Laserscanning? Nicole Obertreiber Harald Jedamski Unsere Kompetenz
4. HAMBURGER ANWENDERFORUM TERRESTRISCHES LASERSCANNING 23. Juni 2011 3D Planungs- und Montagesicherheit im Anlagenbau ein Einsatzgebiet für Laserscanning? Nicole Obertreiber Harald Jedamski Unsere Kompetenz
Topografische Aufnahme der sächsischen Ringwallanlage Willenscharen mit dem 3D-Laserscanning-System Mensi GS100
 Photogrammetrie, Laserscanning, Optische 3D-Messtechnik Beiträge der 4. Oldenburger 3D-Tage 2005, Th. Luhmann (Hrsg.), Wichmann Verlag, Heidelberg, pp. 224-231. Topografische Aufnahme der sächsischen Ringwallanlage
Photogrammetrie, Laserscanning, Optische 3D-Messtechnik Beiträge der 4. Oldenburger 3D-Tage 2005, Th. Luhmann (Hrsg.), Wichmann Verlag, Heidelberg, pp. 224-231. Topografische Aufnahme der sächsischen Ringwallanlage
SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE. www.scan-go.eu www.shop.laserscanning-europe.com V.02.2014
 SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE V.02.2014 www.scan-go.eu www.shop.laserscanning-europe.com SCAN&GO SYSTEM (PATENTRECHTLICH GESCHÜTZT) DIE NEUE VERMESSUNGSTECHNOLOGIE Scan&Go ist eine neue Methode
SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE V.02.2014 www.scan-go.eu www.shop.laserscanning-europe.com SCAN&GO SYSTEM (PATENTRECHTLICH GESCHÜTZT) DIE NEUE VERMESSUNGSTECHNOLOGIE Scan&Go ist eine neue Methode
Fadenpendel (M1) Ziel des Versuches. Theoretischer Hintergrund
 Ziel des Versuches. Theoretischer Hintergrund") Fadenpendel M) Ziel des Versuches Der Aufbau dieses Versuches ist denkbar einfach: eine Kugel hängt an einem Faden. Der Zusammenhang zwischen der Fadenlänge und der Schwingungsdauer ist nicht schwer zu
Fadenpendel M) Ziel des Versuches Der Aufbau dieses Versuches ist denkbar einfach: eine Kugel hängt an einem Faden. Der Zusammenhang zwischen der Fadenlänge und der Schwingungsdauer ist nicht schwer zu
Geodätische Sensoren im Deformationsmonitoring
 Geodätische Sensoren im Deformationsmonitoring Michael Rutschmann, Product Manager for Monitoring Solutions (TPS) ALLSAT OPEN - 18. Juni 2009 1. Übersicht Leica Monitoring Lösung Inhalt 2. Geodätische
Geodätische Sensoren im Deformationsmonitoring Michael Rutschmann, Product Manager for Monitoring Solutions (TPS) ALLSAT OPEN - 18. Juni 2009 1. Übersicht Leica Monitoring Lösung Inhalt 2. Geodätische
Bestimmung der Linsenbrennweite nach der Bessel schen Methode
 Bestimmung der Linsenbrennweite nach der Bessel schen Methode Tobias Krähling email: Homepage: 18.04.007 Version: 1. Inhaltsverzeichnis 1. Aufgabenstellung............................................................
Bestimmung der Linsenbrennweite nach der Bessel schen Methode Tobias Krähling email: Homepage: 18.04.007 Version: 1. Inhaltsverzeichnis 1. Aufgabenstellung............................................................
Titelmaster. Absolute Antennenkalibrierung für geodätische Punktfelder. dm cm mm. Philipp Zeimetz
 igg Titelmaster Absolute Antennenkalibrierung für geodätische Punktfelder dm cm mm Philipp Zeimetz Institut für Geodäsie und Geoinformation Universität Bonn FGS 2010, Wettzell/Kötzting Gliederung Antennenproblem
igg Titelmaster Absolute Antennenkalibrierung für geodätische Punktfelder dm cm mm Philipp Zeimetz Institut für Geodäsie und Geoinformation Universität Bonn FGS 2010, Wettzell/Kötzting Gliederung Antennenproblem
Terrestrischer Laserscanner Mensi GS100/GS200 Untersuchungen und Projekte an der HAW Hamburg
 Photogrammetrie, Laserscanning, Optische 3D-Messtechnik Beiträge der Oldenburger 3D-Tage 2004. Th. Luhmann (Hrsg.), Wichmann Verlag, Heidelberg, pp.98-107. Terrestrischer Laserscanner Mensi GS100/GS200
Photogrammetrie, Laserscanning, Optische 3D-Messtechnik Beiträge der Oldenburger 3D-Tage 2004. Th. Luhmann (Hrsg.), Wichmann Verlag, Heidelberg, pp.98-107. Terrestrischer Laserscanner Mensi GS100/GS200
Vortrag DI Martin OBERZAUCHER TU Wien 06.05.2014 15:30-15:50
 Vortrag DI Martin OBERZAUCHER TU Wien 06.05.2014 15:30-15:50 Laserscan Modewort oder Wunderwaffe? Laserscanning Wunderwaffe oder Modewort Die 3D-Messtechnologien der BIM-Vermesser DI Martin Oberzaucher
Vortrag DI Martin OBERZAUCHER TU Wien 06.05.2014 15:30-15:50 Laserscan Modewort oder Wunderwaffe? Laserscanning Wunderwaffe oder Modewort Die 3D-Messtechnologien der BIM-Vermesser DI Martin Oberzaucher
Untersuchungen zur Genauigkeit eines integrierten terrestrischen Laserscanner-Kamera Systems
 Untersuchungen zur Genauigkeit eines integrierten terrestrischen Laserscanner-Kamera Systems Christian MULSOW, Danilo SCHNEIDER, Andreas ULLRICH und Nikolaus STUDNICKA Zusammenfassung Auf dem Laserscannermarkt
Untersuchungen zur Genauigkeit eines integrierten terrestrischen Laserscanner-Kamera Systems Christian MULSOW, Danilo SCHNEIDER, Andreas ULLRICH und Nikolaus STUDNICKA Zusammenfassung Auf dem Laserscannermarkt
Methoden der Werkstoffprüfung Kapitel II Statistische Verfahren I. WS 2009/2010 Kapitel 2.0
 Methoden der Werkstoffprüfung Kapitel II Statistische Verfahren I WS 009/010 Kapitel.0 Schritt 1: Bestimmen der relevanten Kenngrößen Kennwerte Einflussgrößen Typ A/Typ B einzeln im ersten Schritt werden
Methoden der Werkstoffprüfung Kapitel II Statistische Verfahren I WS 009/010 Kapitel.0 Schritt 1: Bestimmen der relevanten Kenngrößen Kennwerte Einflussgrößen Typ A/Typ B einzeln im ersten Schritt werden
Hocheffiziente Bestandsdatenerfassung durch portables Laserscanning
 Hocheffiziente Bestandsdatenerfassung durch portables Laserscanning Dr. Christian Hesse, dhp:i www.dhpi.com 4. Hamburger Anwenderforum TLS 1 Dr. Hesse und Partner Ingenieure Hamburg / Buxtehude 25+ Mitarbeiter
Hocheffiziente Bestandsdatenerfassung durch portables Laserscanning Dr. Christian Hesse, dhp:i www.dhpi.com 4. Hamburger Anwenderforum TLS 1 Dr. Hesse und Partner Ingenieure Hamburg / Buxtehude 25+ Mitarbeiter
Wahrscheinlichkeitsrechnung und Statistik für Biologen 2. Der Standardfehler
 Wahrscheinlichkeitsrechnung und Statistik für Biologen 2. Der Standardfehler Martin Hutzenthaler & Dirk Metzler http://www.zi.biologie.uni-muenchen.de/evol/statgen.html 27. April 2010 1 Eine kurze Wiederholung
Wahrscheinlichkeitsrechnung und Statistik für Biologen 2. Der Standardfehler Martin Hutzenthaler & Dirk Metzler http://www.zi.biologie.uni-muenchen.de/evol/statgen.html 27. April 2010 1 Eine kurze Wiederholung
H2 1862 mm. H1 1861 mm
 1747 mm 4157 mm H2 1862 mm H1 1861 mm L1 4418 mm L2 4818 mm H2 2280-2389 mm H1 1922-2020 mm L1 4972 mm L2 5339 mm H3 2670-2789 mm H2 2477-2550 mm L2 5531 mm L3 5981 mm L4 6704 mm H1 2176-2219 mm L1 5205
1747 mm 4157 mm H2 1862 mm H1 1861 mm L1 4418 mm L2 4818 mm H2 2280-2389 mm H1 1922-2020 mm L1 4972 mm L2 5339 mm H3 2670-2789 mm H2 2477-2550 mm L2 5531 mm L3 5981 mm L4 6704 mm H1 2176-2219 mm L1 5205
Statistische Auswertung von Ringversuchen
 Statistische Auswertung von Ringversuchen Roesebeckstr. 4-6 30449 Hannover Tel. 0511/4505-0 Fax 0511/4505-140 mehr als nur erfolgreich oder nicht erfolgreich Lüchtenburger Weg 24 26603 Aurich Tel. 04941/9171-0
Statistische Auswertung von Ringversuchen Roesebeckstr. 4-6 30449 Hannover Tel. 0511/4505-0 Fax 0511/4505-140 mehr als nur erfolgreich oder nicht erfolgreich Lüchtenburger Weg 24 26603 Aurich Tel. 04941/9171-0
Physikalisches Praktikum
 Physikalisches Praktikum Viskosität von Flüssigkeiten Laborbericht Korrigierte Version 9.Juni 2002 Andreas Hettler Inhalt Kapitel I Begriffserklärungen 5 Viskosität 5 Stokes sches
Physikalisches Praktikum Viskosität von Flüssigkeiten Laborbericht Korrigierte Version 9.Juni 2002 Andreas Hettler Inhalt Kapitel I Begriffserklärungen 5 Viskosität 5 Stokes sches
Fachgespräch Emissionsüberwachung Merkblatt
 Merkblatt zur Kalibrierung von automatischen Messeinrichtungen für Stickoxide (NO x ) und Kohlenmonoxid (CO) nach EN 14181 Die DIN EN 14181 Qualitätssicherung für automatische Messeinrichtungen fordert
Merkblatt zur Kalibrierung von automatischen Messeinrichtungen für Stickoxide (NO x ) und Kohlenmonoxid (CO) nach EN 14181 Die DIN EN 14181 Qualitätssicherung für automatische Messeinrichtungen fordert
Geo-Monitoring in der Zukunft. Andreas Wieser Institut für Geodäsie und Photogrammetrie, ETH Zürich
 Geo-Monitoring in der Zukunft Andreas Wieser Institut für Geodäsie und Photogrammetrie, ETH Zürich Registrierte Felssturzereignisse in Österreich Quelle: Sass O, Oberlechner M (2012) Is climate change
Geo-Monitoring in der Zukunft Andreas Wieser Institut für Geodäsie und Photogrammetrie, ETH Zürich Registrierte Felssturzereignisse in Österreich Quelle: Sass O, Oberlechner M (2012) Is climate change
Entwicklung, Kalibrierung und Evaluierung eines tragbaren direkt georeferenzierten Laserscanning Systems für kinematische Anwendungen
 Entwicklung, Kalibrierung und Evaluierung eines tragbaren direkt georeferenzierten Laserscanning Systems für kinematische Anwendungen Geodätische Woche 2015, Stuttgart Erik Heinz, Christian Eling, Lasse
Entwicklung, Kalibrierung und Evaluierung eines tragbaren direkt georeferenzierten Laserscanning Systems für kinematische Anwendungen Geodätische Woche 2015, Stuttgart Erik Heinz, Christian Eling, Lasse
Kapitel 1 Beschreibende Statistik
 Beispiel 1.25: fiktive Aktienkurse Zeitpunkt i 0 1 2 Aktienkurs x i 100 160 100 Frage: Wie hoch ist die durchschnittliche Wachstumsrate? Dr. Karsten Webel 53 Beispiel 1.25: fiktive Aktienkurse (Fortsetzung)
Beispiel 1.25: fiktive Aktienkurse Zeitpunkt i 0 1 2 Aktienkurs x i 100 160 100 Frage: Wie hoch ist die durchschnittliche Wachstumsrate? Dr. Karsten Webel 53 Beispiel 1.25: fiktive Aktienkurse (Fortsetzung)
Photogrammetrie Laserscanning Optische SD- Messtechnik
 Thomas Luhmann/Christina Müller (Hrsg.) Photogrammetrie Laserscanning Optische SD- Messtechnik Beiträge der Oldenburger 3D-Tage 2009 Wichmann Heidelberg Inhaltsverzeichnis Vorwort V 1 Laserscanning l 1.1
Thomas Luhmann/Christina Müller (Hrsg.) Photogrammetrie Laserscanning Optische SD- Messtechnik Beiträge der Oldenburger 3D-Tage 2009 Wichmann Heidelberg Inhaltsverzeichnis Vorwort V 1 Laserscanning l 1.1
Statistik-Klausur vom
 Statistik-Klausur vom 27.09.2010 Bearbeitungszeit: 60 Minuten Aufgabe 1 Ein international tätiges Unternehmen mit mehreren Niederlassungen in Deutschland und dem übrigen Europa hat seine überfälligen Forderungen
Statistik-Klausur vom 27.09.2010 Bearbeitungszeit: 60 Minuten Aufgabe 1 Ein international tätiges Unternehmen mit mehreren Niederlassungen in Deutschland und dem übrigen Europa hat seine überfälligen Forderungen
Physikalische Übungen für Pharmazeuten
 Helmholtz-Institut für Strahlen- und Kernphysik Seminar Physikalische Übungen für Pharmazeuten Ch. Wendel Max Becker Karsten Koop Dr. Christoph Wendel Übersicht Inhalt des Seminars Praktikum - Vorbereitung
Helmholtz-Institut für Strahlen- und Kernphysik Seminar Physikalische Übungen für Pharmazeuten Ch. Wendel Max Becker Karsten Koop Dr. Christoph Wendel Übersicht Inhalt des Seminars Praktikum - Vorbereitung
St. Mauritius Niederwenigern
 St. Mauritius Niederwenigern Bauaufnahme durch die Hochschule Bochum am 25. April 2013 St. Mauritius wird vermessen Was passiert denn hier? So oder ähnlich lauteten am 25. April 2013 die Fragen von interessierten
St. Mauritius Niederwenigern Bauaufnahme durch die Hochschule Bochum am 25. April 2013 St. Mauritius wird vermessen Was passiert denn hier? So oder ähnlich lauteten am 25. April 2013 die Fragen von interessierten
Pflichtteilaufgaben zu Beschreiben und Begründen. Baden-Württemberg
 Pflichtteilaufgaben zu Beschreiben und Begründen Baden-Württemberg Hilfsmittel: keine allgemeinbildende Gymnasien Alexander Schwarz www.mathe-aufgaben.com September 06 Abituraufgaben (Haupttermin) Aufgabe
Pflichtteilaufgaben zu Beschreiben und Begründen Baden-Württemberg Hilfsmittel: keine allgemeinbildende Gymnasien Alexander Schwarz www.mathe-aufgaben.com September 06 Abituraufgaben (Haupttermin) Aufgabe
Klausur Vermessungskunde
 Klausur Vermessungskunde Vermessungskunde für Bauingenieure (Vordiplom) und Vermessungskunde für Bauingenieure und Geodäten (Modulprüfung B.Sc) Herbst 2013 27.09.2013 Name: Vorname: Matr.-Nr.: Aufgabe
Klausur Vermessungskunde Vermessungskunde für Bauingenieure (Vordiplom) und Vermessungskunde für Bauingenieure und Geodäten (Modulprüfung B.Sc) Herbst 2013 27.09.2013 Name: Vorname: Matr.-Nr.: Aufgabe
Gekürzte Version, Laimburger LagerungsTagung
 Gekürzte Version, Laimburger LagerungsTagung 09.08.2016 Objektivere Reifetests am Apfel mittels digitaler Stärkebestimmung: Erste Schlüsse aus 3-jähriger Entwicklungszusammenarbeit am AMILON Gerät Ines
Gekürzte Version, Laimburger LagerungsTagung 09.08.2016 Objektivere Reifetests am Apfel mittels digitaler Stärkebestimmung: Erste Schlüsse aus 3-jähriger Entwicklungszusammenarbeit am AMILON Gerät Ines
??? Übung zur Maßstabsbestimmung in Luftbildern. BSc: Waldinventur und Fernerkundung I. Axel Buschmann Abteilung Waldinventur und Fernerkundung
 Übung zur Maßstabsdefinition Verhältnis zwischen einer abgebildeten Größe (z.b. Streckenlänge) in einer Darstellung der Realität (Karte, Modell, Luftbild) und der entsprechenden Größe in der Realität selbst
Übung zur Maßstabsdefinition Verhältnis zwischen einer abgebildeten Größe (z.b. Streckenlänge) in einer Darstellung der Realität (Karte, Modell, Luftbild) und der entsprechenden Größe in der Realität selbst
Geostatistik und Anwendungen im Precision Farming
 Geostatistik und Anwendungen im Precision Farming Irina Kuzyakova Institut für Pflanzenbau und Grünland Precision Farming Managementstrategie, die die räumlichen Informationstechnologien benutzt, um Entscheidungen
Geostatistik und Anwendungen im Precision Farming Irina Kuzyakova Institut für Pflanzenbau und Grünland Precision Farming Managementstrategie, die die räumlichen Informationstechnologien benutzt, um Entscheidungen
Geodätisches Kolloquium
 Geodätisches Kolloquium Projekte der Ingenieurvermessung DVW NRW e.v. Gesellschaft für Geodäsie Geoinformation und Landmanagement Deutscher Dachverband für Geoinformation e.v. Hochschule Bochum DVW VDV
Geodätisches Kolloquium Projekte der Ingenieurvermessung DVW NRW e.v. Gesellschaft für Geodäsie Geoinformation und Landmanagement Deutscher Dachverband für Geoinformation e.v. Hochschule Bochum DVW VDV
Patientenbezogene Qualitätssicherung von IMRT-Bestrahlungen
 Patientenbezogene Qualitätssicherung Ostprignitz-Ruppiner-Gesundheitsdienste GmbH, OGD Neuruppin / Brandenburg Hintergrund und Ziele Zum Jahresende 2008 wurde die Qualitätssicherung von IMRT- Bestrahlungsplänen
Patientenbezogene Qualitätssicherung Ostprignitz-Ruppiner-Gesundheitsdienste GmbH, OGD Neuruppin / Brandenburg Hintergrund und Ziele Zum Jahresende 2008 wurde die Qualitätssicherung von IMRT- Bestrahlungsplänen
Terrestrische Laserscanner im Prüfstand Geometrische Genauigkeitsuntersuchungen aktueller terrestrischer Laserscanner
 Photogrammetrie, Laserscaig, Optische 3D-Messtechik - Beiträge der Oldeburger 3D-Tage 20, Th. Luhma/Ch. Müller (Hrsg.), Wichma, VDE Verlag GmbH, Berli ud Offebach, 4-4. Terrestrische Laserscaer im Prüfstad
Photogrammetrie, Laserscaig, Optische 3D-Messtechik - Beiträge der Oldeburger 3D-Tage 20, Th. Luhma/Ch. Müller (Hrsg.), Wichma, VDE Verlag GmbH, Berli ud Offebach, 4-4. Terrestrische Laserscaer im Prüfstad
MaTHEMATISCHE GRUNDLAGEN BUGA-AR TELESCOPE. Marko HeRBERTZ
 MaTHEMATISCHE GRUNDLAGEN BUGA-AR TELESCOPE Marko HeRBERTZ Wiederholung: Objekt-, Welt- und Kamerakoordinaten Kugelkoordinaten in kartesische Mögliche Schwierigkeiten Kameralinse Lage der Festung Lagerichtige
MaTHEMATISCHE GRUNDLAGEN BUGA-AR TELESCOPE Marko HeRBERTZ Wiederholung: Objekt-, Welt- und Kamerakoordinaten Kugelkoordinaten in kartesische Mögliche Schwierigkeiten Kameralinse Lage der Festung Lagerichtige
Validierung von Messmethoden. Validierung von Messmethoden
 Validierung von Messmethoden Was soll eine gute Messmethode erfüllen? 1. Richtigkeit (accucacy) 2. Genauigkeit (precision) PD Dr. Sven Reese, LMU München 1 Richtigkeit (accuracy) Gibt Auskunft darüber,
Validierung von Messmethoden Was soll eine gute Messmethode erfüllen? 1. Richtigkeit (accucacy) 2. Genauigkeit (precision) PD Dr. Sven Reese, LMU München 1 Richtigkeit (accuracy) Gibt Auskunft darüber,
Kreis- und Kreisteileberechnungen
 Kreis- und Kreisteileberechnungen Aufgabe 1: Berechne den Inhalt der getönten Fläche aus dem Radius r des größten Kreises und dem Radius a der beiden kleinen Halbkreise. Aufgabe 2: Wie groß ist der äußere
Kreis- und Kreisteileberechnungen Aufgabe 1: Berechne den Inhalt der getönten Fläche aus dem Radius r des größten Kreises und dem Radius a der beiden kleinen Halbkreise. Aufgabe 2: Wie groß ist der äußere
4. ALLSAT OPEN. Terrestrisches Laserscanning Werkzeug oder Spielzeug?
 4. ALLSAT OPEN Terrestrisches Laserscanning Werkzeug oder Spielzeug? Messung und Auswertung anhand zweier vermessungstechnischer Beispiele 14.06.2007 Prinzip Laserscanning Zenit Zenitwinkel Messpunkt Vertikaler
4. ALLSAT OPEN Terrestrisches Laserscanning Werkzeug oder Spielzeug? Messung und Auswertung anhand zweier vermessungstechnischer Beispiele 14.06.2007 Prinzip Laserscanning Zenit Zenitwinkel Messpunkt Vertikaler
Physikprotokoll: Fehlerrechnung. Martin Henning / Torben Zech / Abdurrahman Namdar / Juni 2006
 Physikprotokoll: Fehlerrechnung Martin Henning / 736150 Torben Zech / 7388450 Abdurrahman Namdar / 739068 1. Juni 2006 1 Inhaltsverzeichnis 1 Einleitung 3 2 Vorbereitungen 3 3 Messungen und Auswertungen
Physikprotokoll: Fehlerrechnung Martin Henning / 736150 Torben Zech / 7388450 Abdurrahman Namdar / 739068 1. Juni 2006 1 Inhaltsverzeichnis 1 Einleitung 3 2 Vorbereitungen 3 3 Messungen und Auswertungen
SG Stoßgesetze. Inhaltsverzeichnis. Marcel Schmittfull (Gruppe 2) 25. April Einführung 2
 25. April Einführung 2") SG Stoßgesetze Blockpraktikum Frühjahr 2007 (Gruppe 2) 25. April 2007 Inhaltsverzeichnis 1 Einführung 2 2 Theoretische Grundlagen 2 2.1 Stöße............................ 2 2.2 Schwerpunktsystem....................
SG Stoßgesetze Blockpraktikum Frühjahr 2007 (Gruppe 2) 25. April 2007 Inhaltsverzeichnis 1 Einführung 2 2 Theoretische Grundlagen 2 2.1 Stöße............................ 2 2.2 Schwerpunktsystem....................
GLOWA-ELBE Abschlusskonferenz 15./16. März 2004 in Potsdam
 GLOWA-ELBE Abschlusskonferenz 15./16. März 2004 in Potsdam Klima Simulationsergebnisse des regionalen Klimamodells STAR Friedrich-Wilhelm Gerstengarbe, Peter C. Werner Potsdam-Institut für Klimafolgenforschung
GLOWA-ELBE Abschlusskonferenz 15./16. März 2004 in Potsdam Klima Simulationsergebnisse des regionalen Klimamodells STAR Friedrich-Wilhelm Gerstengarbe, Peter C. Werner Potsdam-Institut für Klimafolgenforschung
Erkennung und Erklärung von systematischen Effekten beim TLS
 Erkennung und Erklärung von systematischen Effekten beim TLS DVW-Seminar TLS 2014, Fulda Christoph Holst, Jessica Tegelbeckers & Heiner Kuhlmann 11. Dezember 2014 Christoph Holst 11. Dezember 2014 Systematische
Erkennung und Erklärung von systematischen Effekten beim TLS DVW-Seminar TLS 2014, Fulda Christoph Holst, Jessica Tegelbeckers & Heiner Kuhlmann 11. Dezember 2014 Christoph Holst 11. Dezember 2014 Systematische
Selbsttest Nr. 1: Qualitätsmanager
 01. Was ist R in der Statistischen Prozessüberwachung? Rauigkeitswert Spannweite Anzahl der vorhandenen Stichproben 02. Wenn mit einer Wahrscheinlichkeit von 12% eine Lieferung unvollständig und mit einer
01. Was ist R in der Statistischen Prozessüberwachung? Rauigkeitswert Spannweite Anzahl der vorhandenen Stichproben 02. Wenn mit einer Wahrscheinlichkeit von 12% eine Lieferung unvollständig und mit einer
Leica ScanStation 2 Erstaunlich schnell, unglaublich vielseitig
 Leica ScanStation 2 Erstaunlich schnell, unglaublich vielseitig Leica ScanStation 2 Der vielseitigste und schnellste 3D-Laserscanner seiner Kategorie Die ScanStation 2 besticht durch die 10-fache Steigerung
Leica ScanStation 2 Erstaunlich schnell, unglaublich vielseitig Leica ScanStation 2 Der vielseitigste und schnellste 3D-Laserscanner seiner Kategorie Die ScanStation 2 besticht durch die 10-fache Steigerung
Terrestrisches Laserscanning zur Dokumentation der Moai auf der Osterinsel
 Denkmäler3.de Industriearchäologie, Heinz-Jürgen Przybilla & Antje Grünkemeier (Hrsg.), Shaker Verlag GmbH, Aachen, 2009: 188-197. THOMAS P. KERSTEN, MAREN LINDSTAEDT, KLAUS MECHELKE, Hamburg & BURKHARD
Denkmäler3.de Industriearchäologie, Heinz-Jürgen Przybilla & Antje Grünkemeier (Hrsg.), Shaker Verlag GmbH, Aachen, 2009: 188-197. THOMAS P. KERSTEN, MAREN LINDSTAEDT, KLAUS MECHELKE, Hamburg & BURKHARD
Ein virtueller Klon für Helgolands Lange Anna durch terrestrisches Laserscanning
 Hamburger Anwenderforum Terrestrisches Laserscanning, 23.06.2005 Ein virtueller Klon für Helgolands Lange Anna durch terrestrisches Laserscanning Maren Lindstaedt, Thomas Kersten HAW Hamburg, Fachbereich
Hamburger Anwenderforum Terrestrisches Laserscanning, 23.06.2005 Ein virtueller Klon für Helgolands Lange Anna durch terrestrisches Laserscanning Maren Lindstaedt, Thomas Kersten HAW Hamburg, Fachbereich
Abschätzung der Messunsicherheit (Fehlerrechnung)
") Abschätzung der Messunsicherheit (Fehlerrechnung) Die vorliegende Anleitung ist für das Anfängerpraktikum Physik gedacht, um den Einstieg in die Abschätzung von Messunsicherheiten und die Berechnung der
Abschätzung der Messunsicherheit (Fehlerrechnung) Die vorliegende Anleitung ist für das Anfängerpraktikum Physik gedacht, um den Einstieg in die Abschätzung von Messunsicherheiten und die Berechnung der
KinematicsOpt HEIDENHAIN. MW M-TS/ Jan 2015
 HEIDENHAIN Grundlagen Anwendung: Genauigkeiten verbessern bei Schwenkbearbeitungen Bearbeitung mit 4. und 5. Achse Vorteile Endanwenderfreundliche Zyklen zur Verbesserung der Kinematik der Maschine Erhöhung
HEIDENHAIN Grundlagen Anwendung: Genauigkeiten verbessern bei Schwenkbearbeitungen Bearbeitung mit 4. und 5. Achse Vorteile Endanwenderfreundliche Zyklen zur Verbesserung der Kinematik der Maschine Erhöhung
Plancal und Trimble CAD/CAE Software- und Positionierlösungen für die Gebäudetechnik. Velden, Juni 2012
 Plancal und Trimble CAD/CAE Software- und Positionierlösungen für die Gebäudetechnik Velden, Juni 2012 Inhalt Unternehmensübersicht Plancal und Trimble Herausforderungen in der Gebäudetechnik Positionierlösungen
Plancal und Trimble CAD/CAE Software- und Positionierlösungen für die Gebäudetechnik Velden, Juni 2012 Inhalt Unternehmensübersicht Plancal und Trimble Herausforderungen in der Gebäudetechnik Positionierlösungen
von Prof. Dr. P. H. Osanna, Prof. Dr. N. M. Durakbasa, Dr. techn. L. Kräuter Inhalt
 Geometrische Produktspezifikation und -Verifikation "GPS" und Messunsicherheit nach "GUM" als Basis moderner Metrologie im fortschrittlichen Produktionsbetrieb von Prof. Dr. P. H. Osanna, Prof. Dr. N.
Geometrische Produktspezifikation und -Verifikation "GPS" und Messunsicherheit nach "GUM" als Basis moderner Metrologie im fortschrittlichen Produktionsbetrieb von Prof. Dr. P. H. Osanna, Prof. Dr. N.
Analyse der EOP-Zeitreihen aus Daten des ITRF2008
 Mathis Bloßfeld, Manuela Seitz, Detlef Angermann Deutsches Geodätisches Forschungsinstitut Geodätische Woche 2009 Forschungsarbeiten im Rahmen der Forschergruppe Erdrotation und globale dynamische Prozesse
Mathis Bloßfeld, Manuela Seitz, Detlef Angermann Deutsches Geodätisches Forschungsinstitut Geodätische Woche 2009 Forschungsarbeiten im Rahmen der Forschergruppe Erdrotation und globale dynamische Prozesse
Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL
 DLR.de Folie 1 03.03.2015, ASW 2016, Wildau Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL DLR.de Folie 2 Agenda
DLR.de Folie 1 03.03.2015, ASW 2016, Wildau Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL DLR.de Folie 2 Agenda
3D Erfassung und Modellierung des Hamburger Bismarck-Denkmals. 3. Hamburger Anwenderforum TLS 2009 Antje Tilsner, B.Sc.
 3D Erfassung und Modellierung des Hamburger Bismarck-Denkmals 3. Hamburger Anwenderforum TLS 2009 Gliederung Einleitung Datenerfassung Modellierung Texturierung und Visualisierung Datenreduktion Genauigkeitsanalyse
3D Erfassung und Modellierung des Hamburger Bismarck-Denkmals 3. Hamburger Anwenderforum TLS 2009 Gliederung Einleitung Datenerfassung Modellierung Texturierung und Visualisierung Datenreduktion Genauigkeitsanalyse
Stochastic Optical Reconstruction Microscopy (STORM)
") Stochastic Optical Reconstruction Microscopy (STORM) Fluoreszenzmikroskopie Funktionsweise von STORM Nutzen von STORM Auswertung Experimente Ausblick Fazit Quellen Aufbau: Fluoreszenzmikroskopie Fluoreszenzmikroskopie
Stochastic Optical Reconstruction Microscopy (STORM) Fluoreszenzmikroskopie Funktionsweise von STORM Nutzen von STORM Auswertung Experimente Ausblick Fazit Quellen Aufbau: Fluoreszenzmikroskopie Fluoreszenzmikroskopie
Überbestimmte lineare Gleichungssysteme
 Überbestimmte lineare Gleichungssysteme Fakultät Grundlagen September 2009 Fakultät Grundlagen Überbestimmte lineare Gleichungssysteme Übersicht 1 2 Fakultät Grundlagen Überbestimmte lineare Gleichungssysteme
Überbestimmte lineare Gleichungssysteme Fakultät Grundlagen September 2009 Fakultät Grundlagen Überbestimmte lineare Gleichungssysteme Übersicht 1 2 Fakultät Grundlagen Überbestimmte lineare Gleichungssysteme
Grundwissen. 5. Jahrgangsstufe. Mathematik
 Grundwissen 5. Jahrgangsstufe Mathematik Grundwissen Mathematik 5. Jahrgangsstufe Seite 1 1 Natürliche Zahlen 1.1 Große Zahlen und Zehnerpotenzen eine Million = 1 000 000 = 10 6 eine Milliarde = 1 000
Grundwissen 5. Jahrgangsstufe Mathematik Grundwissen Mathematik 5. Jahrgangsstufe Seite 1 1 Natürliche Zahlen 1.1 Große Zahlen und Zehnerpotenzen eine Million = 1 000 000 = 10 6 eine Milliarde = 1 000
Mathematische und statistische Methoden II
 Statistik & Methodenlehre e e Prof. Dr. G. Meinhardt 6. Stock, Wallstr. 3 (Raum 06-206) Sprechstunde jederzeit nach Vereinbarung und nach der Vorlesung. Mathematische und statistische Methoden II Dr. Malte
Statistik & Methodenlehre e e Prof. Dr. G. Meinhardt 6. Stock, Wallstr. 3 (Raum 06-206) Sprechstunde jederzeit nach Vereinbarung und nach der Vorlesung. Mathematische und statistische Methoden II Dr. Malte
Jahrgang 2009, Heft 4
 Organ der Deutschen Gesellschaft für Photogrammetrie, Fernerkundung und Geoinformation (DGPF) e. V. Jahrgang 2009, Heft 4 Hauptschriftleiter: Prof. Dr.-Ing. Helmut Mayer Schriftleiter: Prof. Dr. rer.nat.
Organ der Deutschen Gesellschaft für Photogrammetrie, Fernerkundung und Geoinformation (DGPF) e. V. Jahrgang 2009, Heft 4 Hauptschriftleiter: Prof. Dr.-Ing. Helmut Mayer Schriftleiter: Prof. Dr. rer.nat.
Weiterentwicklung eines Verfahrens zur Schallquellenortung an Verbrennungsmotoren
 Weiterentwicklung eines Verfahrens zur Schallquellenortung an Verbrennungsmotoren Bestimmung der Schalldruck- und -Schnelleverteilung einer abstrahlenden Oberfläche mit Hilfe der Boundary-Element-Methode
Weiterentwicklung eines Verfahrens zur Schallquellenortung an Verbrennungsmotoren Bestimmung der Schalldruck- und -Schnelleverteilung einer abstrahlenden Oberfläche mit Hilfe der Boundary-Element-Methode
Kalibrierung von Mess- und Fertigungsmaschinen mit dem LaserTRACER Anwendungen und Ausblick
 Kalibrierung von Mess- und Fertigungsmaschinen mit dem LaserTRACER Anwendungen und Ausblick Genauigkeit für Koordinatenmessgeräte und Werkzeugmaschinen Der LaserTRACER TRAC-CAL für Kalibrierung und Korrektur
Kalibrierung von Mess- und Fertigungsmaschinen mit dem LaserTRACER Anwendungen und Ausblick Genauigkeit für Koordinatenmessgeräte und Werkzeugmaschinen Der LaserTRACER TRAC-CAL für Kalibrierung und Korrektur
Die ABSOLUTE HÄUFIGKEIT einer Merkmalsausprägung gibt an, wie oft diese in der Erhebung eingetreten ist.
 .3. Stochastik Grundlagen Die ABSOLUTE HÄUFIGKEIT einer Merkmalsausprägung gibt an, wie oft diese in der Erhebung eingetreten ist. Die RELATIVE HÄUFIGKEIT einer Merkmalsausprägung gibt an mit welchem Anteil
.3. Stochastik Grundlagen Die ABSOLUTE HÄUFIGKEIT einer Merkmalsausprägung gibt an, wie oft diese in der Erhebung eingetreten ist. Die RELATIVE HÄUFIGKEIT einer Merkmalsausprägung gibt an mit welchem Anteil
Der byzantinische Mühlen- und Werkstattkomplex in Hanghaus 2 von Ephesos / Türkei. Dokumentation und Analyse mit Hilfe von 3D-Laserscanning
 Der byzantinische Mühlen- und Werkstattkomplex in Hanghaus 2 von Ephesos / Türkei Dokumentation und Analyse mit Hilfe von 3D-Laserscanning Anja Cramer 1, Guido Heinz 2, Stefanie Wefers 2 ( 1 i3mainz, FH
Der byzantinische Mühlen- und Werkstattkomplex in Hanghaus 2 von Ephesos / Türkei Dokumentation und Analyse mit Hilfe von 3D-Laserscanning Anja Cramer 1, Guido Heinz 2, Stefanie Wefers 2 ( 1 i3mainz, FH
Leica Geo Office mehr als Sie erwarten GEOMATIK-News 27. November 2008
 Leica Geo Office mehr als Sie erwarten GEOMATIK-News 27. November 2008 Schnellster Start - Ziel Arbeitsablauf Power Geringer Laser Lot Management Platzbedarf Konzept PinPoint Technologie Quick Coding Kundensupport
Leica Geo Office mehr als Sie erwarten GEOMATIK-News 27. November 2008 Schnellster Start - Ziel Arbeitsablauf Power Geringer Laser Lot Management Platzbedarf Konzept PinPoint Technologie Quick Coding Kundensupport
GW Mathematik 5. Klasse
 Begriffe zur Gliederung von Termen Term Rechenart a heißt b heißt a + b (Summe) Addition 1. Summand 2. Summand a b (Differenz) Subtraktion Minuend Subtrahend a b ( Produkt) Multiplikation 1. Faktor 2.
Begriffe zur Gliederung von Termen Term Rechenart a heißt b heißt a + b (Summe) Addition 1. Summand 2. Summand a b (Differenz) Subtraktion Minuend Subtrahend a b ( Produkt) Multiplikation 1. Faktor 2.
ZUM PROBLEM DER BESTIMMUNG DER ADDITIONSKONSTANTE
 ZUM PROBLEM DER BESTIMMUNG DER ADDITIONSKONSTANTE Raimund LOSER In: CASPARY, Wilhelm / HEISTER, Hansbert (Hrsg.) [1984]: Elektrooptische Präzisionsstreckenmessung Beiträge zum Geodätischen Seminar 23.
ZUM PROBLEM DER BESTIMMUNG DER ADDITIONSKONSTANTE Raimund LOSER In: CASPARY, Wilhelm / HEISTER, Hansbert (Hrsg.) [1984]: Elektrooptische Präzisionsstreckenmessung Beiträge zum Geodätischen Seminar 23.
3D Laserscanning im Bezirk der WSD Süd 10 Jahre Erfahrung
 10 Jahre Erfahrung Übersicht: Ausrüstung, Arbeitssicherheit, Messprinzip Beispielhafte Anwendungen aus den Aufgabenbereichen: Baubestandserfassung (Brücken, Schleusen, Wehre) Beweissicherung (z.b. bei
10 Jahre Erfahrung Übersicht: Ausrüstung, Arbeitssicherheit, Messprinzip Beispielhafte Anwendungen aus den Aufgabenbereichen: Baubestandserfassung (Brücken, Schleusen, Wehre) Beweissicherung (z.b. bei
Vermessungskunde für Bauingenieure und Geodäten
 Vermessungskunde für Bauingenieure und Geodäten Übung 6: statistische Auswertung ungleichgenauer Messungen Milo Hirsch Hendrik Hellmers Florian Schill Institut für Geodäsie Fachbereich 13 Inhaltsverzeichnis
Vermessungskunde für Bauingenieure und Geodäten Übung 6: statistische Auswertung ungleichgenauer Messungen Milo Hirsch Hendrik Hellmers Florian Schill Institut für Geodäsie Fachbereich 13 Inhaltsverzeichnis
2. Grundbegriffe. Literatur. Skript D. Huhnke S emg GEM. emg GEM
 . Grundbegriffe Literatur Skript D. Huhnke S. 10-1 Messung Messwert: Wert, der zur Messgröße gehört und der Ausgabe eines Messgerätes eindeutig zugeordnet ist. Messvoraussetzungen Die Messung soll sein
. Grundbegriffe Literatur Skript D. Huhnke S. 10-1 Messung Messwert: Wert, der zur Messgröße gehört und der Ausgabe eines Messgerätes eindeutig zugeordnet ist. Messvoraussetzungen Die Messung soll sein
Absolute Feldkalibrierung von GPS Antennen Ergebnisse (Teil 2)
") Absolute Feldkalibrierung von GPS Antennen Ergebnisse (Teil 2) Gerhard Wübbena, Martin Schmitz, Gerald Boettcher (Geo++ GmbH) Falko Menge, Volker Böder, Heiko Leistner, Günter Seeber (IfE) Inhalt: Ergebnisse
Absolute Feldkalibrierung von GPS Antennen Ergebnisse (Teil 2) Gerhard Wübbena, Martin Schmitz, Gerald Boettcher (Geo++ GmbH) Falko Menge, Volker Böder, Heiko Leistner, Günter Seeber (IfE) Inhalt: Ergebnisse
Berührungslose Messverfahren in der Geodäsie Bestandserfassung in der Münchner Frauenkirche über Laserscanning
 Diplomstudiengang Bauingenieurwesen Vertiefungsrichtung Tiefbau Berührungslose Messverfahren in der Geodäsie Bestandserfassung in der Münchner Frauenkirche über Laserscanning Erstprüfer / Betreuer: Prof.
Diplomstudiengang Bauingenieurwesen Vertiefungsrichtung Tiefbau Berührungslose Messverfahren in der Geodäsie Bestandserfassung in der Münchner Frauenkirche über Laserscanning Erstprüfer / Betreuer: Prof.
Beispiel 2 (Einige Aufgaben zu Lageparametern) Aufgabe 1 (Lageparameter)
 Aufgabe 1 (Lageparameter)") Beispiel (Einige Aufgaben zu Lageparametern) Aufgabe 1 (Lageparameter) 1 Ein Statistiker ist zu früh zu einer Verabredung gekommen und vertreibt sich nun die Zeit damit, daß er die Anzahl X der Stockwerke
Beispiel (Einige Aufgaben zu Lageparametern) Aufgabe 1 (Lageparameter) 1 Ein Statistiker ist zu früh zu einer Verabredung gekommen und vertreibt sich nun die Zeit damit, daß er die Anzahl X der Stockwerke
Aufgaben zum Basiswissen 10. Klasse
 Aufgaben zum Basiswissen 10. Klasse 1. Berechnungen an Kreisen und Dreiecken 1. Aufgabe: In einem Kreis mit Radius r sei α ein Mittelpunktswinkel mit zugehörigem Kreisbogen der Länge b und Kreissektor
Aufgaben zum Basiswissen 10. Klasse 1. Berechnungen an Kreisen und Dreiecken 1. Aufgabe: In einem Kreis mit Radius r sei α ein Mittelpunktswinkel mit zugehörigem Kreisbogen der Länge b und Kreissektor
Zweidimensionale Normalverteilung
 Theorie Zweidimensionale Normalverteilung Ein Beispiel aus dem Mercedes-Benz Leitfaden LF1236 Fallbeispiel Abnahme einer Wuchtmaschine In Wuchtmaschine sem Abschnitt beschrieben. beispielhaft Abnahme einer
Theorie Zweidimensionale Normalverteilung Ein Beispiel aus dem Mercedes-Benz Leitfaden LF1236 Fallbeispiel Abnahme einer Wuchtmaschine In Wuchtmaschine sem Abschnitt beschrieben. beispielhaft Abnahme einer