Kinect Nils Röder, Björn Frömmer
|
|
|
- Maja Schmitt
- vor 8 Jahren
- Abrufe
Transkript
1 Kinect Nils Röder, Björn Frömmer

2 Agenda Einleitung Hardware Funktionsweise der Kamera Algorithmus (Pose Recognition, Tracking)

3 Einleitung Was ist Kinect? Eingabegerät (Human Computer Interface) Optisches Tracking Kinect Tiefen-Kamera Einfache Kameras liefern lediglich zweidimensionale Abbildungen unserer Umwelt. Diese ist jedoch dreidimensional. Neben dem Farbwert hat jedes Pixel zusätzlich einen Entfernungswert.

4 Einleitung Was leistet Kinect? Personen sollen erkannt und getrackt werden Interaktion mit Applikation Pose auf virtuellen Charakter übertragen... Beispiel OpenNI

5 Einleitung Warum Kinect? Interaktion ohne herkömmliche Konsolen-Hardware: Joystick, Controller, Wii, etc. Freie Hände Natural Interaction Intuitives Steuern von Spiele -Anwendungen

6 Agenda Einleitung Hardware Funktionsweise der Kamera Algorithmus (Pose Recognition, Tracking)

7 Hardware

8 3D Tiefen-Sensor Hardware Projeziert großflächiges Infrarot-Punkt-Muster in den Raum Tiefen-Bild 640 X 30 FPS Genauigkeit bei 2m Abstand zum Sensor X,Y = 3mm Z = 1cm Arbeitsbereich ~ 0,8 3,5m Schwarzweiß CMOS empfängt reflektierte Infrarotstrahlen (Personen, Objekte, etc.)

9 RGB Kamera Hardware UXGA 1600 X 1200 Dient der Gesichtserkennung Aufzeichnen von Videos und Fotos (z.b. zum Erzeugen einer Textur)
")
10 Hardware Motorisiertes neigen der Kamera Nachjustieren Tilt

11 Hardware Multi-Array Mikrofon Sprache einem getrackten Spieler zuweisen Wichtig für Spracheingabe Beispiel OpenNI

12 Agenda Einleitung Hardware Funktionsweise der Kamera Algorithmus (Pose Recognition, Tracking)

13 Funktionsweise Betrachtete Szene Tiefen-Bild der Szene Ergebnis IR-Projektion IR-Reflektion

14 Funktionsweise

15 Allgemeine Informationen Kinect merkt sich die Form des Spielers (31 Punkte am Körper) Robust bei Verdeckung (Spieler läuft durch Kamerabild etc.) Einzelne Finger werden nicht erkannt Maximale Spieleranzahl (XBOX 360) = 2
 Einzelne Finger werden nicht erkannt Maximale")
16 Agenda Einleitung Hardware Funktionsweise der Kamera Algorithmus (Pose Recognition, Tracking)

17 Kinect Algorithmus Übersicht Algorithmus zur Steuerung der Kinect-Software (Games etc.) 3D Positionen von menschlichen Körpern mittels (einzelner!) Tiefenbilder bestimmen Keine zeitlichen Informationen keine Bewegungsinformation! Machine Learning
 Tiefenbilder bestimmen Keine zeitlichen Informationen keine")
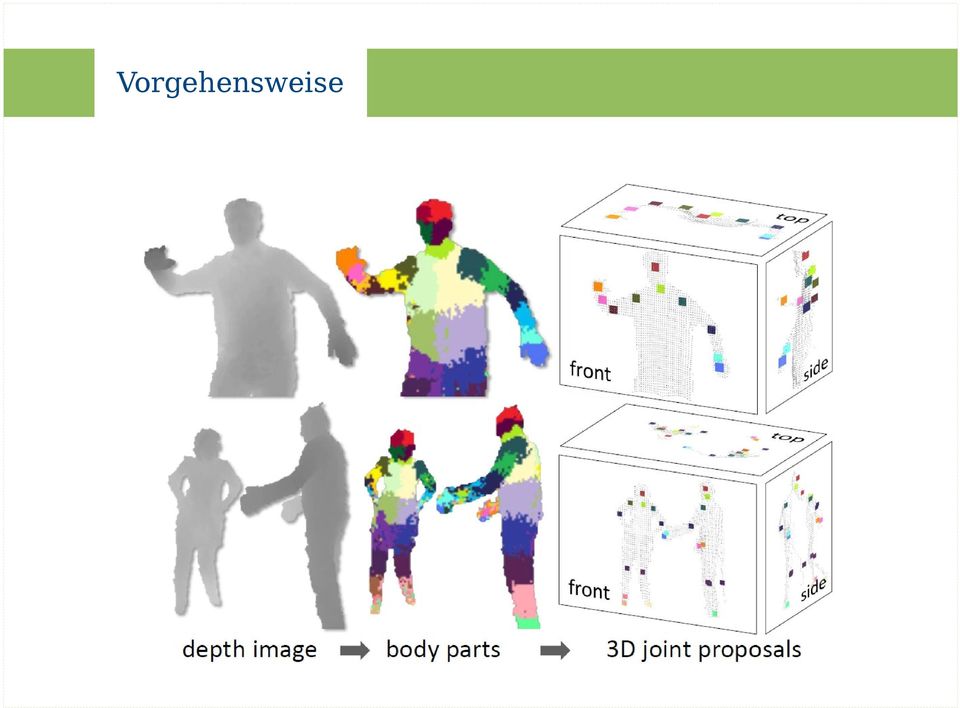
18 Vorgehensweise
19 Trainingsdaten, Probleme alter Systeme 2D Systeme Erstellung von Trainingsdaten schwierig Farb- und Texturunterschiede (Kleidung, Haare, Haut, ) Daher meist Reduzierung auf 2D-Silhouetten 3D Systeme (Tiefenkameras) reduzieren die Schwierigkeiten, ernstzunehmende Variationen bei Körper und Kleidungsformen bleiben bestehen

20 Trainingsdaten (1) Der menschliche Körper ist in der Lage eine enorme Vielzahl an Posen einzunehmen diese Posen sind schwer zu simulieren Lösung Erstellung einer grossen Motion-Capturing Datenbank ~500k frames in einigen hundert Sequenzen von fahrenden, tretenden, rennenden, Menu-navigierenden,..., Personen Nur Einzelbilder werden ausgewertet, da das System keine zeitlichen Daten ( Bewegung) zur Klassifizierung benötigt
 zur")
21 Trainingsdaten (2) Bei Änderungen der Pose kommt es zu Überschneidungen in der Körperhaltung, so dass einzelne Frames nahezu identisch sind Diese Frames werden mittels furthest neighbor clustering eliminiert und gelöscht ~100k Posen bleiben übrig, bei denen 2 Posen niemals näher als 5cm zusammen liegen
22 Synthetische Daten generieren Nun werden mittels der ~100k Posen synthetische Daten generiert Ziel Realismus und Vielfalt 15 verschiedene Base-Meshes von (menschlichen) Körpern werden jeweils mit den Motion-Capturing Daten gefüttert Zufallsgenerierte Parameter: Motion-Capturing Frame Kamera-Position ( User Position!) Kamera-Rauschen Kleidung & Haare
23 Body Part Labeling (1) Einzelne Körperteile (31 verschiedene) werden klassifiziert und durch unterschiedliche Einfärbungen gekennzeichnet Einige Bereiche stellen direkt Gelenke dar Andere sind Lückenfüller oder können in Verbindung mit weiteren Bereichen benutzt werden um mögliche Gelenk-Positionen zu identifizieren intermediate representation transformiert dieses Problem in eines das durch bereits bestehende und effiziente Klassifizierungs-Algorithmen gelöst werden kann Die zeitliche Einbusse die dadurch entsteht ist vernachlässigbar
24 Body-Part Labeling (2) Die farbigen Körperbereiche werden als Texturemap gespeichert Mit dieser Texturemap werden die verschiedenen Testmodelle eingefärbt Die gesamten Daten (eingefärbte Körperteilmodelle und die zugehörigen Tiefenbilddaten) werden als komplett beschriftete Trainingsdaten dem Klassifizierer zur Verfügung gestellt
25 Tiefenbild Eigenschaften ( features ) Vergleichseigenschaften werden generiert durch (Paper: Randomized Trees for real-time keypoint recognition) Einzelne Pixel lassen nur ungenaue Rückschlüsse darauf zu um welchen Körperteil es sich handelt, aber in der Masse ( decision forest ) sind sie ausreichend um eine genaue Bestimmung der trainierten Körperteile zu ermöglichen
26 randomized decision forests (1) randomized decision trees & forests haben sich als schnelle und effektive multi-class classifier erwiesen, und können effizient auf einer GPU implementiert werden Ein Wald ist eine Ansammlung von Bäumen (Wer hätte DAS gedacht?!)
27 randomized decision forests (2) Jeder Knoten eines Baumes besteht aus einem feature fθ und einem Schwellwert τ Um ein Pixel x im Bild zu klassifizieren wird an der Wurzel begonnen und die Formel für fθ an den einzelnen Knoten berechnet. Je nach Schwellwert τ wird dann links oder rechts im Baum weitergegangen
28 randomized decision forests (3) An einem Blatt des Baumes t angekommen wird die gelernte distribution des entsprechenden body part labels gespeichert Alle distributions der betrachteten Bäume werden am Schluss gemittelt um die finale Klassifizierung zu erhalten
29 training Jeder Baum wird mit unterschiedlichen, zufällig erzeugten Bildern trainiert (~2000 pro Baum, um eine ungefähr gleichmässige Verteilung über alle Körperteile zu gewährleisten) Algorithmus: siehe Paper: Randomized Trees for real-time keypoint recognition, V. Lepetit, P. Lagger, and P. Fua Um Zeit zu sparen wurde eine verteilte Lösung implementiert: 3 Bäume bis zur Tiefe 20 mittels 1 Mio. Bildern zu trainieren dauert auf einem 1000-Kern- Cluster in etwa einen Tag
30 Auswertung Mittels der errechneten Pixelinformationen über einzelne Körperteile durch den classifier kann nun ein Rückschluss auf die 3D-Positionen der einzelnen Gelenke im Raum gegeben werden Diese Informationen sind die finalen Daten, die das System nach aussen weitergibt Diese Daten können dann von einer Anwendung genutzt werden (z.b. um Spiele zu steuern Kinect & XBOX 360)
31 Quellen Microsoft Kinect: Randomized Trees:
Professionelle Seminare im Bereich MS-Office
 Der Name BEREICH.VERSCHIEBEN() ist etwas unglücklich gewählt. Man kann mit der Funktion Bereiche zwar verschieben, man kann Bereiche aber auch verkleinern oder vergrößern. Besser wäre es, die Funktion
Der Name BEREICH.VERSCHIEBEN() ist etwas unglücklich gewählt. Man kann mit der Funktion Bereiche zwar verschieben, man kann Bereiche aber auch verkleinern oder vergrößern. Besser wäre es, die Funktion
Virtuelle Fotografie (CGI)
") (CGI) Vorteile und Beispiele Das ist (k)ein Foto. Diese Abbildung ist nicht mit einer Kamera erstellt worden. Was Sie sehen basiert auf CAD-Daten unserer Kunden. Wir erzeugen damit Bilder ausschließlich
(CGI) Vorteile und Beispiele Das ist (k)ein Foto. Diese Abbildung ist nicht mit einer Kamera erstellt worden. Was Sie sehen basiert auf CAD-Daten unserer Kunden. Wir erzeugen damit Bilder ausschließlich
Kapiteltests zum Leitprogramm Binäre Suchbäume
 Kapiteltests zum Leitprogramm Binäre Suchbäume Björn Steffen Timur Erdag überarbeitet von Christina Class Binäre Suchbäume Kapiteltests für das ETH-Leitprogramm Adressaten und Institutionen Das Leitprogramm
Kapiteltests zum Leitprogramm Binäre Suchbäume Björn Steffen Timur Erdag überarbeitet von Christina Class Binäre Suchbäume Kapiteltests für das ETH-Leitprogramm Adressaten und Institutionen Das Leitprogramm
Schritt für Schritt zur Krankenstandsstatistik
 Schritt für Schritt zur Krankenstandsstatistik Eine Anleitung zur Nutzung der Excel-Tabellen zur Erhebung des Krankenstands. Entwickelt durch: Kooperationsprojekt Arbeitsschutz in der ambulanten Pflege
Schritt für Schritt zur Krankenstandsstatistik Eine Anleitung zur Nutzung der Excel-Tabellen zur Erhebung des Krankenstands. Entwickelt durch: Kooperationsprojekt Arbeitsschutz in der ambulanten Pflege
10.1 Auflösung, Drucken und Scannen
 Um einige technische Erläuterungen kommen wir auch in diesem Buch nicht herum. Für Ihre Bildergebnisse sind diese technischen Zusammenhänge sehr wichtig, nehmen Sie sich also etwas Zeit und lesen Sie dieses
Um einige technische Erläuterungen kommen wir auch in diesem Buch nicht herum. Für Ihre Bildergebnisse sind diese technischen Zusammenhänge sehr wichtig, nehmen Sie sich also etwas Zeit und lesen Sie dieses
4. Jeder Knoten hat höchstens zwei Kinder, ein linkes und ein rechtes.
 Binäre Bäume Definition: Ein binärer Baum T besteht aus einer Menge von Knoten, die durch eine Vater-Kind-Beziehung wie folgt strukturiert ist: 1. Es gibt genau einen hervorgehobenen Knoten r T, die Wurzel
Binäre Bäume Definition: Ein binärer Baum T besteht aus einer Menge von Knoten, die durch eine Vater-Kind-Beziehung wie folgt strukturiert ist: 1. Es gibt genau einen hervorgehobenen Knoten r T, die Wurzel
Persönliches Adressbuch
 Persönliches Adressbuch Persönliches Adressbuch Seite 1 Persönliches Adressbuch Seite 2 Inhaltsverzeichnis 1. WICHTIGE INFORMATIONEN ZUR BEDIENUNG VON CUMULUS 4 2. ALLGEMEINE INFORMATIONEN ZUM PERSÖNLICHEN
Persönliches Adressbuch Persönliches Adressbuch Seite 1 Persönliches Adressbuch Seite 2 Inhaltsverzeichnis 1. WICHTIGE INFORMATIONEN ZUR BEDIENUNG VON CUMULUS 4 2. ALLGEMEINE INFORMATIONEN ZUM PERSÖNLICHEN
15 Optimales Kodieren
 15 Optimales Kodieren Es soll ein optimaler Kodierer C(T ) entworfen werden, welcher eine Information (z.b. Text T ) mit möglichst geringer Bitanzahl eindeutig überträgt. Die Anforderungen an den optimalen
15 Optimales Kodieren Es soll ein optimaler Kodierer C(T ) entworfen werden, welcher eine Information (z.b. Text T ) mit möglichst geringer Bitanzahl eindeutig überträgt. Die Anforderungen an den optimalen
Advanced Rendering Interior Szene
 Advanced Rendering Interior Szene in Cinema 4D 11-11.5 Als erstes, sollten Sie ihre Szene in Cinema 4D öffnen. vergewissern sie sich, ob alle Licht quellen die evtl. mit importiert wurden, aus der Szene
Advanced Rendering Interior Szene in Cinema 4D 11-11.5 Als erstes, sollten Sie ihre Szene in Cinema 4D öffnen. vergewissern sie sich, ob alle Licht quellen die evtl. mit importiert wurden, aus der Szene
SharePoint Demonstration
 SharePoint Demonstration Was zeigt die Demonstration? Diese Demonstration soll den modernen Zugriff auf Daten und Informationen veranschaulichen und zeigen welche Vorteile sich dadurch in der Zusammenarbeit
SharePoint Demonstration Was zeigt die Demonstration? Diese Demonstration soll den modernen Zugriff auf Daten und Informationen veranschaulichen und zeigen welche Vorteile sich dadurch in der Zusammenarbeit
ZfP-Sonderpreis der DGZfP beim Regionalwettbewerb Jugend forscht BREMERHAVEN. Der Zauberwürfel-Roboter. Paul Giese. Schule: Wilhelm-Raabe-Schule
 ZfP-Sonderpreis der DGZfP beim Regionalwettbewerb Jugend forscht BREMERHAVEN Der Zauberwürfel-Roboter Paul Giese Schule: Wilhelm-Raabe-Schule Jugend forscht 2013 Kurzfassung Regionalwettbewerb Bremerhaven
ZfP-Sonderpreis der DGZfP beim Regionalwettbewerb Jugend forscht BREMERHAVEN Der Zauberwürfel-Roboter Paul Giese Schule: Wilhelm-Raabe-Schule Jugend forscht 2013 Kurzfassung Regionalwettbewerb Bremerhaven
Anleitung zur Excel-Anwendung Basisprämienberechnung
 Anleitung zur Excel-Anwendung Basisprämienberechnung Inhaltsverzeichnis Inhaltsverzeichnis... 1 Abbildungsverzeichnis... 1 1. Einleitung... 2 2. Allgemeine Anwendungshinweise... 2 3. Die Tabellenkalkulation...
Anleitung zur Excel-Anwendung Basisprämienberechnung Inhaltsverzeichnis Inhaltsverzeichnis... 1 Abbildungsverzeichnis... 1 1. Einleitung... 2 2. Allgemeine Anwendungshinweise... 2 3. Die Tabellenkalkulation...
AGROPLUS Buchhaltung. Daten-Server und Sicherheitskopie. Version vom 21.10.2013b
 AGROPLUS Buchhaltung Daten-Server und Sicherheitskopie Version vom 21.10.2013b 3a) Der Daten-Server Modus und der Tresor Der Daten-Server ist eine Betriebsart welche dem Nutzer eine grosse Flexibilität
AGROPLUS Buchhaltung Daten-Server und Sicherheitskopie Version vom 21.10.2013b 3a) Der Daten-Server Modus und der Tresor Der Daten-Server ist eine Betriebsart welche dem Nutzer eine grosse Flexibilität
AZK 1- Freistil. Der Dialog "Arbeitszeitkonten" Grundsätzliches zum Dialog "Arbeitszeitkonten"
 AZK 1- Freistil Nur bei Bedarf werden dafür gekennzeichnete Lohnbestandteile (Stundenzahl und Stundensatz) zwischen dem aktuellen Bruttolohnjournal und dem AZK ausgetauscht. Das Ansparen und das Auszahlen
AZK 1- Freistil Nur bei Bedarf werden dafür gekennzeichnete Lohnbestandteile (Stundenzahl und Stundensatz) zwischen dem aktuellen Bruttolohnjournal und dem AZK ausgetauscht. Das Ansparen und das Auszahlen
Abamsoft Finos im Zusammenspiel mit shop to date von DATA BECKER
 Abamsoft Finos im Zusammenspiel mit shop to date von DATA BECKER Abamsoft Finos in Verbindung mit der Webshopanbindung wurde speziell auf die Shop-Software shop to date von DATA BECKER abgestimmt. Mit
Abamsoft Finos im Zusammenspiel mit shop to date von DATA BECKER Abamsoft Finos in Verbindung mit der Webshopanbindung wurde speziell auf die Shop-Software shop to date von DATA BECKER abgestimmt. Mit
Lichtbrechung an Linsen
 Sammellinsen Lichtbrechung an Linsen Fällt ein paralleles Lichtbündel auf eine Sammellinse, so werden die Lichtstrahlen so gebrochen, dass sie durch einen Brennpunkt der Linse verlaufen. Der Abstand zwischen
Sammellinsen Lichtbrechung an Linsen Fällt ein paralleles Lichtbündel auf eine Sammellinse, so werden die Lichtstrahlen so gebrochen, dass sie durch einen Brennpunkt der Linse verlaufen. Der Abstand zwischen
Binäre Bäume. 1. Allgemeines. 2. Funktionsweise. 2.1 Eintragen
 Binäre Bäume 1. Allgemeines Binäre Bäume werden grundsätzlich verwendet, um Zahlen der Größe nach, oder Wörter dem Alphabet nach zu sortieren. Dem einfacheren Verständnis zu Liebe werde ich mich hier besonders
Binäre Bäume 1. Allgemeines Binäre Bäume werden grundsätzlich verwendet, um Zahlen der Größe nach, oder Wörter dem Alphabet nach zu sortieren. Dem einfacheren Verständnis zu Liebe werde ich mich hier besonders
1 topologisches Sortieren
 Wolfgang Hönig / Andreas Ecke WS 09/0 topologisches Sortieren. Überblick. Solange noch Knoten vorhanden: a) Suche Knoten v, zu dem keine Kante führt (Falls nicht vorhanden keine topologische Sortierung
Wolfgang Hönig / Andreas Ecke WS 09/0 topologisches Sortieren. Überblick. Solange noch Knoten vorhanden: a) Suche Knoten v, zu dem keine Kante führt (Falls nicht vorhanden keine topologische Sortierung
NetStream Helpdesk-Online. Verwalten und erstellen Sie Ihre eigenen Tickets
 Verwalten und erstellen Sie Ihre eigenen Tickets NetStream GmbH 2014 Was ist NetStream Helpdesk-Online? NetStream Helpdesk-Online ist ein professionelles Support-Tool, mit dem Sie alle Ihre Support-Anfragen
Verwalten und erstellen Sie Ihre eigenen Tickets NetStream GmbH 2014 Was ist NetStream Helpdesk-Online? NetStream Helpdesk-Online ist ein professionelles Support-Tool, mit dem Sie alle Ihre Support-Anfragen
Praktikum Physik. Protokoll zum Versuch: Geometrische Optik. Durchgeführt am 24.11.2011
 Praktikum Physik Protokoll zum Versuch: Geometrische Optik Durchgeführt am 24.11.2011 Gruppe X Name1 und Name 2 (abc.xyz@uni-ulm.de) (abc.xyz@uni-ulm.de) Betreuerin: Wir bestätigen hiermit, dass wir das
Praktikum Physik Protokoll zum Versuch: Geometrische Optik Durchgeführt am 24.11.2011 Gruppe X Name1 und Name 2 (abc.xyz@uni-ulm.de) (abc.xyz@uni-ulm.de) Betreuerin: Wir bestätigen hiermit, dass wir das
Wichtige Information zur Verwendung von CS-TING Version 9 für Microsoft Word 2000 (und höher)
") Wichtige Information zur Verwendung von CS-TING Version 9 für Microsoft Word 2000 (und höher) CS-TING Version 9 Das Programm CS-TING Version 9 für Microsoft Word 2000 (und höher) verwendet Makros bei der
Wichtige Information zur Verwendung von CS-TING Version 9 für Microsoft Word 2000 (und höher) CS-TING Version 9 Das Programm CS-TING Version 9 für Microsoft Word 2000 (und höher) verwendet Makros bei der
Würfelt man dabei je genau 10 - mal eine 1, 2, 3, 4, 5 und 6, so beträgt die Anzahl. der verschiedenen Reihenfolgen, in denen man dies tun kann, 60!.
 040304 Übung 9a Analysis, Abschnitt 4, Folie 8 Die Wahrscheinlichkeit, dass bei n - maliger Durchführung eines Zufallexperiments ein Ereignis A ( mit Wahrscheinlichkeit p p ( A ) ) für eine beliebige Anzahl
040304 Übung 9a Analysis, Abschnitt 4, Folie 8 Die Wahrscheinlichkeit, dass bei n - maliger Durchführung eines Zufallexperiments ein Ereignis A ( mit Wahrscheinlichkeit p p ( A ) ) für eine beliebige Anzahl
Vorlesung Betriebstechnik/Netzplantechnik Operations Research
 Vorlesung Betriebstechnik/Netzplantechnik Operations Research Organisation Agenda Übungen Netzplantechnik GANTT-Diagramme Weitere Übungen 2 Übungen 3 weitere Übungen Nr. Vorgang Dauer AOB 1 Kickoff 2-2
Vorlesung Betriebstechnik/Netzplantechnik Operations Research Organisation Agenda Übungen Netzplantechnik GANTT-Diagramme Weitere Übungen 2 Übungen 3 weitere Übungen Nr. Vorgang Dauer AOB 1 Kickoff 2-2
ALEMÃO. Text 1. Lernen, lernen, lernen
 ALEMÃO Text 1 Lernen, lernen, lernen Der Mai ist für viele deutsche Jugendliche keine schöne Zeit. Denn dann müssen sie in vielen Bundesländern die Abiturprüfungen schreiben. Das heiβt: lernen, lernen,
ALEMÃO Text 1 Lernen, lernen, lernen Der Mai ist für viele deutsche Jugendliche keine schöne Zeit. Denn dann müssen sie in vielen Bundesländern die Abiturprüfungen schreiben. Das heiβt: lernen, lernen,
Kompakte Graphmodelle handgezeichneter Bilder. Einbeziehung in Autentizierung und Bilderkennung
 Kompakte Graphmodelle handgezeichneter Bilder Einbeziehung in Autentizierung und Bilderkennung Inhaltsverzeichnis 1 Einleitung Das graphische Model.1 Image Thinning................................. 3.
Kompakte Graphmodelle handgezeichneter Bilder Einbeziehung in Autentizierung und Bilderkennung Inhaltsverzeichnis 1 Einleitung Das graphische Model.1 Image Thinning................................. 3.
Ordner Berechtigung vergeben Zugriffsrechte unter Windows einrichten
 Ordner Berechtigung vergeben Zugriffsrechte unter Windows einrichten Was sind Berechtigungen? Unter Berechtigungen werden ganz allgemein die Zugriffsrechte auf Dateien und Verzeichnisse (Ordner) verstanden.
Ordner Berechtigung vergeben Zugriffsrechte unter Windows einrichten Was sind Berechtigungen? Unter Berechtigungen werden ganz allgemein die Zugriffsrechte auf Dateien und Verzeichnisse (Ordner) verstanden.
Zeichen bei Zahlen entschlüsseln
 Zeichen bei Zahlen entschlüsseln In diesem Kapitel... Verwendung des Zahlenstrahls Absolut richtige Bestimmung von absoluten Werten Operationen bei Zahlen mit Vorzeichen: Addieren, Subtrahieren, Multiplizieren
Zeichen bei Zahlen entschlüsseln In diesem Kapitel... Verwendung des Zahlenstrahls Absolut richtige Bestimmung von absoluten Werten Operationen bei Zahlen mit Vorzeichen: Addieren, Subtrahieren, Multiplizieren
Guide DynDNS und Portforwarding
 Guide DynDNS und Portforwarding Allgemein Um Geräte im lokalen Netzwerk von überall aus über das Internet erreichen zu können, kommt man um die Themen Dynamik DNS (kurz DynDNS) und Portweiterleitung(auch
Guide DynDNS und Portforwarding Allgemein Um Geräte im lokalen Netzwerk von überall aus über das Internet erreichen zu können, kommt man um die Themen Dynamik DNS (kurz DynDNS) und Portweiterleitung(auch
Inhalt. 1 Einleitung AUTOMATISCHE DATENSICHERUNG AUF EINEN CLOUDSPEICHER
 AUTOMATISCHE DATENSICHERUNG AUF EINEN CLOUDSPEICHER Inhalt 1 Einleitung... 1 2 Einrichtung der Aufgabe für die automatische Sicherung... 2 2.1 Die Aufgabenplanung... 2 2.2 Der erste Testlauf... 9 3 Problembehebung...
AUTOMATISCHE DATENSICHERUNG AUF EINEN CLOUDSPEICHER Inhalt 1 Einleitung... 1 2 Einrichtung der Aufgabe für die automatische Sicherung... 2 2.1 Die Aufgabenplanung... 2 2.2 Der erste Testlauf... 9 3 Problembehebung...
1. Sichtbarkeitsproblem beim Rendern einer dreidimensionalen Szene auf einer zweidimensionalen
 3D-Rendering Ulf Döring, Markus Färber 07.03.2011 1. Sichtbarkeitsproblem beim Rendern einer dreidimensionalen Szene auf einer zweidimensionalen Anzeigefläche (a) Worin besteht das Sichtbarkeitsproblem?
3D-Rendering Ulf Döring, Markus Färber 07.03.2011 1. Sichtbarkeitsproblem beim Rendern einer dreidimensionalen Szene auf einer zweidimensionalen Anzeigefläche (a) Worin besteht das Sichtbarkeitsproblem?
Elektronisches Frühwarnsystem bei Bränden
 W e ttbe w e rb s be itr ag Projekt: Elektronisches Frühwarnsystem bei Bränden Schule: Apian-Gymnasium, Ingolstadt Team:, und, alle besuchen die 6. Klasse. Projektbeschreibung: Der Mittelpunkt unserer
W e ttbe w e rb s be itr ag Projekt: Elektronisches Frühwarnsystem bei Bränden Schule: Apian-Gymnasium, Ingolstadt Team:, und, alle besuchen die 6. Klasse. Projektbeschreibung: Der Mittelpunkt unserer
Adobe Photoshop. Lightroom 5 für Einsteiger Bilder verwalten und entwickeln. Sam Jost
 Adobe Photoshop Lightroom 5 für Einsteiger Bilder verwalten und entwickeln Sam Jost Kapitel 2 Der erste Start 2.1 Mitmachen beim Lesen....................... 22 2.2 Für Apple-Anwender.........................
Adobe Photoshop Lightroom 5 für Einsteiger Bilder verwalten und entwickeln Sam Jost Kapitel 2 Der erste Start 2.1 Mitmachen beim Lesen....................... 22 2.2 Für Apple-Anwender.........................
SafeRun-Modus: Die Sichere Umgebung für die Ausführung von Programmen
 SafeRun-Modus: Die Sichere Umgebung für die Ausführung von Programmen Um die maximale Sicherheit für das Betriebssystem und Ihre persönlichen Daten zu gewährleisten, können Sie Programme von Drittherstellern
SafeRun-Modus: Die Sichere Umgebung für die Ausführung von Programmen Um die maximale Sicherheit für das Betriebssystem und Ihre persönlichen Daten zu gewährleisten, können Sie Programme von Drittherstellern
Lineargleichungssysteme: Additions-/ Subtraktionsverfahren
 Lineargleichungssysteme: Additions-/ Subtraktionsverfahren W. Kippels 22. Februar 2014 Inhaltsverzeichnis 1 Einleitung 2 2 Lineargleichungssysteme zweiten Grades 2 3 Lineargleichungssysteme höheren als
Lineargleichungssysteme: Additions-/ Subtraktionsverfahren W. Kippels 22. Februar 2014 Inhaltsverzeichnis 1 Einleitung 2 2 Lineargleichungssysteme zweiten Grades 2 3 Lineargleichungssysteme höheren als
Anleitung zum erstellen einer PDF-Datei aus Microsoft Word
 Anleitung zum erstellen einer PDF-Datei aus Microsoft Word 1. Vorbereitung des PCs Um dem Tutorial folgen zu können müssen folgende Programme auf Ihrem PC installiert sein: Ghostskript 8.64: Ghostskript
Anleitung zum erstellen einer PDF-Datei aus Microsoft Word 1. Vorbereitung des PCs Um dem Tutorial folgen zu können müssen folgende Programme auf Ihrem PC installiert sein: Ghostskript 8.64: Ghostskript
Berührungslose Interaktion zur Vereinfachung der Produktion
 Berührungslose Interaktion zur Vereinfachung der Produktion 16.09.2014, Frankfurt, VDMA-Informationstag macio GmbH www.macio.de Joern Kowalewski Geschäftsführer Bestimmung des Spielfeldes + smarte Sensorik
Berührungslose Interaktion zur Vereinfachung der Produktion 16.09.2014, Frankfurt, VDMA-Informationstag macio GmbH www.macio.de Joern Kowalewski Geschäftsführer Bestimmung des Spielfeldes + smarte Sensorik
teischl.com Software Design & Services e.u. office@teischl.com www.teischl.com/booknkeep www.facebook.com/booknkeep
 teischl.com Software Design & Services e.u. office@teischl.com www.teischl.com/booknkeep www.facebook.com/booknkeep 1. Erstellen Sie ein neues Rechnungsformular Mit book n keep können Sie nun Ihre eigenen
teischl.com Software Design & Services e.u. office@teischl.com www.teischl.com/booknkeep www.facebook.com/booknkeep 1. Erstellen Sie ein neues Rechnungsformular Mit book n keep können Sie nun Ihre eigenen
Outlook Web App 2010 Kurzanleitung
 Seite 1 von 6 Outlook Web App 2010 Einleitung Der Zugriff über Outlook Web App ist von jedem Computer der weltweit mit dem Internet verbunden ist möglich. Die Benutzeroberfläche ist ähnlich zum Microsoft
Seite 1 von 6 Outlook Web App 2010 Einleitung Der Zugriff über Outlook Web App ist von jedem Computer der weltweit mit dem Internet verbunden ist möglich. Die Benutzeroberfläche ist ähnlich zum Microsoft
Turtle Charts mit der ViFlow Turtle Schablone (VTS) erstellen
 erstellen") Turtle Charts mit der ViFlow Turtle Schablone (VTS) erstellen Was genau ist ein Turtle Chart? Ein Turtle Chart (auch Schildkrötengrafik) ist eine Prozessdarstellungsform ähnlich eines Prozesssteckbriefes.
Turtle Charts mit der ViFlow Turtle Schablone (VTS) erstellen Was genau ist ein Turtle Chart? Ein Turtle Chart (auch Schildkrötengrafik) ist eine Prozessdarstellungsform ähnlich eines Prozesssteckbriefes.
Windows 10. Vortrag am Fleckenherbst Bürgertreff Neuhausen. www.buergertreff-neuhausen.de www.facebook.com/buergertreffneuhausen
 Windows 10 Vortrag am Fleckenherbst Bürgertreff Neuhausen 1 Inhalt Was ist neu (im Vergleich zu Windows 8.1) Wann lohnt sich ein Umstieg Update Installation von Windows 10 Startmenü Windows Explorer Webbrowser
Windows 10 Vortrag am Fleckenherbst Bürgertreff Neuhausen 1 Inhalt Was ist neu (im Vergleich zu Windows 8.1) Wann lohnt sich ein Umstieg Update Installation von Windows 10 Startmenü Windows Explorer Webbrowser
MORE Profile. Pass- und Lizenzverwaltungssystem. Stand: 19.02.2014 MORE Projects GmbH
 MORE Profile Pass- und Lizenzverwaltungssystem erstellt von: Thorsten Schumann erreichbar unter: thorsten.schumann@more-projects.de Stand: MORE Projects GmbH Einführung Die in More Profile integrierte
MORE Profile Pass- und Lizenzverwaltungssystem erstellt von: Thorsten Schumann erreichbar unter: thorsten.schumann@more-projects.de Stand: MORE Projects GmbH Einführung Die in More Profile integrierte
How-to: Webserver NAT. Securepoint Security System Version 2007nx
 Securepoint Security System Inhaltsverzeichnis Webserver NAT... 3 1 Konfiguration einer Webserver NAT... 4 1.1 Einrichten von Netzwerkobjekten... 4 1.2 Erstellen von Firewall-Regeln... 6 Seite 2 Webserver
Securepoint Security System Inhaltsverzeichnis Webserver NAT... 3 1 Konfiguration einer Webserver NAT... 4 1.1 Einrichten von Netzwerkobjekten... 4 1.2 Erstellen von Firewall-Regeln... 6 Seite 2 Webserver
Local Control Network Technische Dokumentation
 Steuerung von Hifi-Anlagen mit der LCN-GVS Häufig wird der Wunsch geäußert, eine Hi-Fi-Anlage in die Steuerung der LCN-GVS einzubinden. Auch das ist realisierbar. Für die hier gezeigte Lösung müssen wenige
Steuerung von Hifi-Anlagen mit der LCN-GVS Häufig wird der Wunsch geäußert, eine Hi-Fi-Anlage in die Steuerung der LCN-GVS einzubinden. Auch das ist realisierbar. Für die hier gezeigte Lösung müssen wenige
Freigabemitteilung Nr. 39. Neue Funktionen Emailadresse zurücksetzen / ändern Kennung ändern Anlegen von OCS (elektr. Postfach) Mailbenutzern
 Mailbenutzern") Freigabemitteilung Nr. 39 Neue Funktionen Emailadresse zurücksetzen / ändern Kennung ändern Anlegen von OCS (elektr. Postfach) Mailbenutzern DFBnet Benutzerverwaltung Erstellt: Letzte Änderung: Geprüft:
Freigabemitteilung Nr. 39 Neue Funktionen Emailadresse zurücksetzen / ändern Kennung ändern Anlegen von OCS (elektr. Postfach) Mailbenutzern DFBnet Benutzerverwaltung Erstellt: Letzte Änderung: Geprüft:
HIER GEHT ES UM IHR GUTES GELD ZINSRECHNUNG IM UNTERNEHMEN
 HIER GEHT ES UM IHR GUTES GELD ZINSRECHNUNG IM UNTERNEHMEN Zinsen haben im täglichen Geschäftsleben große Bedeutung und somit auch die eigentliche Zinsrechnung, z.b: - Wenn Sie Ihre Rechnungen zu spät
HIER GEHT ES UM IHR GUTES GELD ZINSRECHNUNG IM UNTERNEHMEN Zinsen haben im täglichen Geschäftsleben große Bedeutung und somit auch die eigentliche Zinsrechnung, z.b: - Wenn Sie Ihre Rechnungen zu spät
Rasterpunkte und Rasterdichte (Knoten/km)
") Rasterpunkte und Rasterdichte (Knoten/km) Von den meisten Anwendern unbemerkt schlummern diese Teile in den unbekannten Tiefen von EEP und beweisen ihre Daseinsberechtigung hemmungslos und brutal meistens
Rasterpunkte und Rasterdichte (Knoten/km) Von den meisten Anwendern unbemerkt schlummern diese Teile in den unbekannten Tiefen von EEP und beweisen ihre Daseinsberechtigung hemmungslos und brutal meistens
TECHNISCHE INFORMATION LESSOR LOHN/GEHALT BEITRAGSNACHWEIS-AUSGLEICH BUCH.-BLATT MICROSOFT DYNAMICS NAV
 MICROSOFT DYNAMICS NAV Inhaltsverzeichnis TECHNISCHE INFORMATION: Einleitung... 3 LESSOR LOHN/GEHALT Beschreibung... 3 Prüfung der Ausgleichszeilen... 9 Zurücksetzen der Ausgleichsroutine... 12 Vorgehensweise
MICROSOFT DYNAMICS NAV Inhaltsverzeichnis TECHNISCHE INFORMATION: Einleitung... 3 LESSOR LOHN/GEHALT Beschreibung... 3 Prüfung der Ausgleichszeilen... 9 Zurücksetzen der Ausgleichsroutine... 12 Vorgehensweise
Leichte-Sprache-Bilder
 Leichte-Sprache-Bilder Reinhild Kassing Information - So geht es 1. Bilder gucken 2. anmelden für Probe-Bilder 3. Bilder bestellen 4. Rechnung bezahlen 5. Bilder runterladen 6. neue Bilder vorschlagen
Leichte-Sprache-Bilder Reinhild Kassing Information - So geht es 1. Bilder gucken 2. anmelden für Probe-Bilder 3. Bilder bestellen 4. Rechnung bezahlen 5. Bilder runterladen 6. neue Bilder vorschlagen
Eine Anwendung mit InstantRails 1.7
 Eine Anwung mit InstantRails 1.7 Beschrieben wird das Anlegen einer einfachen Rails-Anwung, die ohne Datenbank auskommt. Schwerpunktmäßig wird auf den Zusammenhang von Controllern, Views und der zugehörigen
Eine Anwung mit InstantRails 1.7 Beschrieben wird das Anlegen einer einfachen Rails-Anwung, die ohne Datenbank auskommt. Schwerpunktmäßig wird auf den Zusammenhang von Controllern, Views und der zugehörigen
Grundfunktionen und Bedienung
 Kapitel 13 Mit der App Health ist eine neue Anwendung in ios 8 enthalten, die von vorangegangenen Betriebssystemen bislang nicht geboten wurde. Health fungiert dabei als Aggregator für die Daten von Fitness-
Kapitel 13 Mit der App Health ist eine neue Anwendung in ios 8 enthalten, die von vorangegangenen Betriebssystemen bislang nicht geboten wurde. Health fungiert dabei als Aggregator für die Daten von Fitness-
Hilfe zur Urlaubsplanung und Zeiterfassung
 Hilfe zur Urlaubsplanung und Zeiterfassung Urlaubs- und Arbeitsplanung: Mit der Urlaubs- und Arbeitsplanung kann jeder Mitarbeiter in Coffee seine Zeiten eintragen. Die Eintragung kann mit dem Status anfragen,
Hilfe zur Urlaubsplanung und Zeiterfassung Urlaubs- und Arbeitsplanung: Mit der Urlaubs- und Arbeitsplanung kann jeder Mitarbeiter in Coffee seine Zeiten eintragen. Die Eintragung kann mit dem Status anfragen,
TTS - TinyTimeSystem. Unterrichtsprojekt BIBI
 TTS - TinyTimeSystem Unterrichtsprojekt BIBI Mathias Metzler, Philipp Winder, Viktor Sohm 28.01.2008 TinyTimeSystem Inhaltsverzeichnis Problemstellung... 2 Lösungsvorschlag... 2 Punkte die unser Tool erfüllen
TTS - TinyTimeSystem Unterrichtsprojekt BIBI Mathias Metzler, Philipp Winder, Viktor Sohm 28.01.2008 TinyTimeSystem Inhaltsverzeichnis Problemstellung... 2 Lösungsvorschlag... 2 Punkte die unser Tool erfüllen
Kurzeinführung Excel2App. Version 1.0.0
 Kurzeinführung Excel2App Version 1.0.0 Inhalt Einleitung Das Ausgangs-Excel Excel-Datei hochladen Excel-Datei konvertieren und importieren Ergebnis des Imports Spalten einfügen Fehleranalyse Import rückgängig
Kurzeinführung Excel2App Version 1.0.0 Inhalt Einleitung Das Ausgangs-Excel Excel-Datei hochladen Excel-Datei konvertieren und importieren Ergebnis des Imports Spalten einfügen Fehleranalyse Import rückgängig
Projektsteuerung Projekte effizient steuern. Welche Steuerungsinstrumente werden eingesetzt?
 1.0 Projektmanagement Mitarbeiter, die Projekte leiten oder zukünftig übernehmen sollen Vermittlung von Grundwissen zur erfolgreichen Durchführung von Projekten. Die Teilnehmer erarbeiten anhand ihrer
1.0 Projektmanagement Mitarbeiter, die Projekte leiten oder zukünftig übernehmen sollen Vermittlung von Grundwissen zur erfolgreichen Durchführung von Projekten. Die Teilnehmer erarbeiten anhand ihrer
Fachdidaktik der Informatik 18.12.08 Jörg Depner, Kathrin Gaißer
 Fachdidaktik der Informatik 18.12.08 Jörg Depner, Kathrin Gaißer Klassendiagramme Ein Klassendiagramm dient in der objektorientierten Softwareentwicklung zur Darstellung von Klassen und den Beziehungen,
Fachdidaktik der Informatik 18.12.08 Jörg Depner, Kathrin Gaißer Klassendiagramme Ein Klassendiagramm dient in der objektorientierten Softwareentwicklung zur Darstellung von Klassen und den Beziehungen,
Wie verbinde ich ein JBOD-System mit dem QStore QMX? - 1
 Wie verbinde ich ein JBOD-System mit dem QStore QMX? In diesem Handbuch erläutern wir Ihnen, wie Sie ein JBOD-System an Ihr QStor QMX Gerät anschließen und das RAID Set über das RAID-Controller BIOS einstellen/verwalten
Wie verbinde ich ein JBOD-System mit dem QStore QMX? In diesem Handbuch erläutern wir Ihnen, wie Sie ein JBOD-System an Ihr QStor QMX Gerät anschließen und das RAID Set über das RAID-Controller BIOS einstellen/verwalten
AUF LETZTER SEITE DIESER ANLEITUNG!!!
 BELEG DATENABGLEICH: Der Beleg-Datenabgleich wird innerhalb des geöffneten Steuerfalls über ELSTER-Belegdaten abgleichen gestartet. Es werden Ihnen alle verfügbaren Belege zum Steuerfall im ersten Bildschirm
BELEG DATENABGLEICH: Der Beleg-Datenabgleich wird innerhalb des geöffneten Steuerfalls über ELSTER-Belegdaten abgleichen gestartet. Es werden Ihnen alle verfügbaren Belege zum Steuerfall im ersten Bildschirm
Microsoft PowerPoint 2013 Folien gemeinsam nutzen
 Hochschulrechenzentrum Justus-Liebig-Universität Gießen Microsoft PowerPoint 2013 Folien gemeinsam nutzen Folien gemeinsam nutzen in PowerPoint 2013 Seite 1 von 4 Inhaltsverzeichnis Einleitung... 2 Einzelne
Hochschulrechenzentrum Justus-Liebig-Universität Gießen Microsoft PowerPoint 2013 Folien gemeinsam nutzen Folien gemeinsam nutzen in PowerPoint 2013 Seite 1 von 4 Inhaltsverzeichnis Einleitung... 2 Einzelne
Anhand des bereits hergeleiteten Models erstellen wir nun mit der Formel
 Ausarbeitung zum Proseminar Finanzmathematische Modelle und Simulationen bei Raphael Kruse und Prof. Dr. Wolf-Jürgen Beyn zum Thema Simulation des Anlagenpreismodels von Simon Uphus im WS 09/10 Zusammenfassung
Ausarbeitung zum Proseminar Finanzmathematische Modelle und Simulationen bei Raphael Kruse und Prof. Dr. Wolf-Jürgen Beyn zum Thema Simulation des Anlagenpreismodels von Simon Uphus im WS 09/10 Zusammenfassung
3. Verpackungskünstler. Berechnungen am Quader, Umgang mit Termen, räumliche Vorstellung
 Berechnungen am Quader, Umgang mit Termen, räumliche Vorstellung Päckchen, die man verschenken möchte, werden gerne mit Geschenkband verschnürt. Dazu wird das Päckchen auf seine größte Seite gelegt, wie
Berechnungen am Quader, Umgang mit Termen, räumliche Vorstellung Päckchen, die man verschenken möchte, werden gerne mit Geschenkband verschnürt. Dazu wird das Päckchen auf seine größte Seite gelegt, wie
GeoPilot (Android) die App
 die App") GeoPilot (Android) die App Mit der neuen Rademacher GeoPilot App machen Sie Ihr Android Smartphone zum Sensor und steuern beliebige Szenen über den HomePilot. Die App beinhaltet zwei Funktionen, zum einen
GeoPilot (Android) die App Mit der neuen Rademacher GeoPilot App machen Sie Ihr Android Smartphone zum Sensor und steuern beliebige Szenen über den HomePilot. Die App beinhaltet zwei Funktionen, zum einen
Den Durchblick haben. VOLKSBANK BAD MÜNDER eg. Online aber sicher: Unsere Produkt- und Sicherheitshotline hilft und informiert
 Den Durchblick haben Online aber sicher: Unsere Produkt- und Sicherheitshotline hilft und informiert VOLKSBANK BAD MÜNDER eg www.vbbadmuender.de...meine Bank! Jeder Mensch hat etwas, das ihn antreibt.
Den Durchblick haben Online aber sicher: Unsere Produkt- und Sicherheitshotline hilft und informiert VOLKSBANK BAD MÜNDER eg www.vbbadmuender.de...meine Bank! Jeder Mensch hat etwas, das ihn antreibt.
FlowFact Alle Versionen
 Training FlowFact Alle Versionen Stand: 29.09.2005 Rechnung schreiben Einführung Wie Sie inzwischen wissen, können die unterschiedlichsten Daten über verknüpfte Fenster miteinander verbunden werden. Für
Training FlowFact Alle Versionen Stand: 29.09.2005 Rechnung schreiben Einführung Wie Sie inzwischen wissen, können die unterschiedlichsten Daten über verknüpfte Fenster miteinander verbunden werden. Für
ERPaaS TM. In nur drei Minuten zur individuellen Lösung und maximaler Flexibilität.
 ERPaaS TM In nur drei Minuten zur individuellen Lösung und maximaler Flexibilität. Was ist ERPaaS TM? Kurz gesagt: ERPaaS TM ist die moderne Schweizer Business Software europa3000 TM, welche im Rechenzentrum
ERPaaS TM In nur drei Minuten zur individuellen Lösung und maximaler Flexibilität. Was ist ERPaaS TM? Kurz gesagt: ERPaaS TM ist die moderne Schweizer Business Software europa3000 TM, welche im Rechenzentrum
Umstieg auf Microsoft Exchange in der Fakultät 02
 Umstieg auf Microsoft Exchange in der Fakultät 02 Der IT-Steuerkreis der Hochschule München hat am am 26.07.12 einstimmig beschlossen an der Hochschule München ein neues Groupware-System auf der Basis
Umstieg auf Microsoft Exchange in der Fakultät 02 Der IT-Steuerkreis der Hochschule München hat am am 26.07.12 einstimmig beschlossen an der Hochschule München ein neues Groupware-System auf der Basis
ACHTUNG: Es können gpx-dateien und mit dem GP7 aufgezeichnete trc-dateien umgewandelt werden.
 Track in Route umwandeln ACHTUNG: Ein Track kann nur dann in eine Route umgewandelt werden, wenn der Track auf Wegen gefahren wurde. Ein Querfeldein-Track kann nicht in eine Route umgewandelt werden, da
Track in Route umwandeln ACHTUNG: Ein Track kann nur dann in eine Route umgewandelt werden, wenn der Track auf Wegen gefahren wurde. Ein Querfeldein-Track kann nicht in eine Route umgewandelt werden, da
Suche schlecht beschriftete Bilder mit Eigenen Abfragen
 Suche schlecht beschriftete Bilder mit Eigenen Abfragen Ist die Bilderdatenbank über einen längeren Zeitraum in Benutzung, so steigt die Wahrscheinlichkeit für schlecht beschriftete Bilder 1. Insbesondere
Suche schlecht beschriftete Bilder mit Eigenen Abfragen Ist die Bilderdatenbank über einen längeren Zeitraum in Benutzung, so steigt die Wahrscheinlichkeit für schlecht beschriftete Bilder 1. Insbesondere
Microsoft Access 2013 Navigationsformular (Musterlösung)
") Hochschulrechenzentrum Justus-Liebig-Universität Gießen Microsoft Access 2013 Navigationsformular (Musterlösung) Musterlösung zum Navigationsformular (Access 2013) Seite 1 von 5 Inhaltsverzeichnis Vorbemerkung...
Hochschulrechenzentrum Justus-Liebig-Universität Gießen Microsoft Access 2013 Navigationsformular (Musterlösung) Musterlösung zum Navigationsformular (Access 2013) Seite 1 von 5 Inhaltsverzeichnis Vorbemerkung...
Easy-Monitoring Universelle Sensor Kommunikations und Monitoring Plattform
 Easy-Monitoring Universelle Sensor Kommunikations und Monitoring Plattform Eberhard Baur Informatik Schützenstraße 24 78315 Radolfzell Germany Tel. +49 (0)7732 9459330 Fax. +49 (0)7732 9459332 Email: mail@eb-i.de
Easy-Monitoring Universelle Sensor Kommunikations und Monitoring Plattform Eberhard Baur Informatik Schützenstraße 24 78315 Radolfzell Germany Tel. +49 (0)7732 9459330 Fax. +49 (0)7732 9459332 Email: mail@eb-i.de
ACDSee Pro 2. ACDSee Pro 2 Tutorials: Übertragung von Fotos (+ Datenbank) auf einen anderen Computer. Über Metadaten und die Datenbank
 auf einen anderen Computer. Über Metadaten und die Datenbank") Tutorials: Übertragung von Fotos (+ ) auf einen anderen Computer Export der In dieser Lektion erfahren Sie, wie Sie am effektivsten Fotos von einem Computer auf einen anderen übertragen. Wenn Sie Ihre
Tutorials: Übertragung von Fotos (+ ) auf einen anderen Computer Export der In dieser Lektion erfahren Sie, wie Sie am effektivsten Fotos von einem Computer auf einen anderen übertragen. Wenn Sie Ihre
GEVITAS Farben-Reaktionstest
 GEVITAS Farben-Reaktionstest GEVITAS Farben-Reaktionstest Inhalt 1. Allgemeines... 1 2. Funktionsweise der Tests... 2 3. Die Ruhetaste und die Auslösetaste... 2 4. Starten der App Hauptmenü... 3 5. Auswahl
GEVITAS Farben-Reaktionstest GEVITAS Farben-Reaktionstest Inhalt 1. Allgemeines... 1 2. Funktionsweise der Tests... 2 3. Die Ruhetaste und die Auslösetaste... 2 4. Starten der App Hauptmenü... 3 5. Auswahl
HOW TO Heat Mapping mit EasyMap
 HOW TO Heat Mapping mit EasyMap Sie möchten analysieren, ob sich Ihre Kunden räumlich clustern? Sie sind auf der Suche nach Hot Spots, um Schwerpunktregionen herauszuarbeiten und neue Zielgebiete für Ihre
HOW TO Heat Mapping mit EasyMap Sie möchten analysieren, ob sich Ihre Kunden räumlich clustern? Sie sind auf der Suche nach Hot Spots, um Schwerpunktregionen herauszuarbeiten und neue Zielgebiete für Ihre
Anbieter auf dem Foto-Marktplatz werden
 Wie kann ich meine Fotos auf dem Marktplatz anbieten? Anbieter auf dem Foto-Marktplatz werden Um Ihre Bilder auf dem Marktplatz präsentieren zu können benötigen Sie persönliche Zugangsdaten, damit Sie
Wie kann ich meine Fotos auf dem Marktplatz anbieten? Anbieter auf dem Foto-Marktplatz werden Um Ihre Bilder auf dem Marktplatz präsentieren zu können benötigen Sie persönliche Zugangsdaten, damit Sie
Basisanforderungen: EVA-Prinzips. Erweiterte Anforderungen: wirtschaftlichen und privaten Alltag.
 Basisanforderungen: 1. Erstelle eine einfache Motor-Steuerung (siehe Anforderungen) 2. Erläutere den Begriff Steuerung. 3. Benenne die Sensoren und Aktoren dieser Steuerung. 4. Beschreibe die Informationsverarbeitung
Basisanforderungen: 1. Erstelle eine einfache Motor-Steuerung (siehe Anforderungen) 2. Erläutere den Begriff Steuerung. 3. Benenne die Sensoren und Aktoren dieser Steuerung. 4. Beschreibe die Informationsverarbeitung
Lizenzierung von StarMoney 8.0 bzw. StarMoney Business 5.0 durchführen
 Lizenzierung von StarMoney 8.0 bzw. StarMoney Business 5.0 durchführen In dieser Anleitung möchten wir Ihnen die Lizenzierung der StarMoney 8.0 bzw. StarMoney Business 5.0 erläutern. In dieser Anleitung
Lizenzierung von StarMoney 8.0 bzw. StarMoney Business 5.0 durchführen In dieser Anleitung möchten wir Ihnen die Lizenzierung der StarMoney 8.0 bzw. StarMoney Business 5.0 erläutern. In dieser Anleitung
INDEX. Öffentliche Ordner erstellen Seite 2. Offline verfügbar einrichten Seite 3. Berechtigungen setzen Seite 7. Öffentliche Ordner Offline
 Öffentliche Ordner Offline INDEX Öffentliche Ordner erstellen Seite 2 Offline verfügbar einrichten Seite 3 Berechtigungen setzen Seite 7 Erstelldatum 12.08.05 Version 1.1 Öffentliche Ordner Im Microsoft
Öffentliche Ordner Offline INDEX Öffentliche Ordner erstellen Seite 2 Offline verfügbar einrichten Seite 3 Berechtigungen setzen Seite 7 Erstelldatum 12.08.05 Version 1.1 Öffentliche Ordner Im Microsoft
Erstellen von x-y-diagrammen in OpenOffice.calc
 Erstellen von x-y-diagrammen in OpenOffice.calc In dieser kleinen Anleitung geht es nur darum, aus einer bestehenden Tabelle ein x-y-diagramm zu erzeugen. D.h. es müssen in der Tabelle mindestens zwei
Erstellen von x-y-diagrammen in OpenOffice.calc In dieser kleinen Anleitung geht es nur darum, aus einer bestehenden Tabelle ein x-y-diagramm zu erzeugen. D.h. es müssen in der Tabelle mindestens zwei
Aufträge bearbeiten in euro-bis flow
 Aufträge bearbeiten in euro-bis flow Zunächst sollte darauf geachtet werden, in welchem Status sich ein Auftrag oder eine einzelne Position befindet. Davon abhängig stehen Ihnen verschiedene Möglichkeiten
Aufträge bearbeiten in euro-bis flow Zunächst sollte darauf geachtet werden, in welchem Status sich ein Auftrag oder eine einzelne Position befindet. Davon abhängig stehen Ihnen verschiedene Möglichkeiten
Diagnostisches Interview zur Bruchrechnung
 Diagnostisches Interview zur Bruchrechnung (1) Tortendiagramm Zeigen Sie der Schülerin/dem Schüler das Tortendiagramm. a) Wie groß ist der Teil B des Kreises? b) Wie groß ist der Teil D des Kreises? (2)
Diagnostisches Interview zur Bruchrechnung (1) Tortendiagramm Zeigen Sie der Schülerin/dem Schüler das Tortendiagramm. a) Wie groß ist der Teil B des Kreises? b) Wie groß ist der Teil D des Kreises? (2)
Online Newsletter III
 Online Newsletter III Hallo zusammen! Aus aktuellem Anlass wurde ein neuer Newsletter fällig. Die wichtigste Neuerung betrifft unseren Webshop mit dem Namen ehbshop! Am Montag 17.10.11 wurde die Testphase
Online Newsletter III Hallo zusammen! Aus aktuellem Anlass wurde ein neuer Newsletter fällig. Die wichtigste Neuerung betrifft unseren Webshop mit dem Namen ehbshop! Am Montag 17.10.11 wurde die Testphase
Fotos in Tobii Communicator verwenden
 Fotos in Tobii Communicator verwenden Hier wird beschrieben wie man Fotos in Tobii Communicator verwenden kann und was man zur Nutzung beachten sollte. Fotonutzung in Tobii Communicator In einigen Fällen
Fotos in Tobii Communicator verwenden Hier wird beschrieben wie man Fotos in Tobii Communicator verwenden kann und was man zur Nutzung beachten sollte. Fotonutzung in Tobii Communicator In einigen Fällen
Konfiguration der tiptel Yeastar MyPBX IP-Telefonanlagen hinter AVM FRITZ!Box
 Konfiguration der tiptel Yeastar MyPBX IP-Telefonanlagen hinter AVM FRITZ!Box Allgemeines Stand 23.07.2015 Einige Anbieter von Internet-und Sprachdiensten erlauben dem Kunden nicht die freie Auswahl eines
Konfiguration der tiptel Yeastar MyPBX IP-Telefonanlagen hinter AVM FRITZ!Box Allgemeines Stand 23.07.2015 Einige Anbieter von Internet-und Sprachdiensten erlauben dem Kunden nicht die freie Auswahl eines
Adami CRM - Outlook Replikation User Dokumentation
 Adami CRM - Outlook Replikation User Dokumentation Die neue Eigenschaft der Adami CRM Applikation macht den Information Austausch mit Microsoft Outlook auf vier Ebenen möglich: Kontakte, Aufgaben, Termine
Adami CRM - Outlook Replikation User Dokumentation Die neue Eigenschaft der Adami CRM Applikation macht den Information Austausch mit Microsoft Outlook auf vier Ebenen möglich: Kontakte, Aufgaben, Termine
Teil 1: IT- und Medientechnik
 Matrikelnummer Punkte Note Verwenden Sie nur dieses Klausurformular für Ihre Lösungen. Die Blätter müssen zusammengeheftet bleiben. Es dürfen keine Hilfsmittel oder Notizen in der Klausur verwendet werden
Matrikelnummer Punkte Note Verwenden Sie nur dieses Klausurformular für Ihre Lösungen. Die Blätter müssen zusammengeheftet bleiben. Es dürfen keine Hilfsmittel oder Notizen in der Klausur verwendet werden
Kurs Photoshop. Lehrplan zum
 Lehrplan zum Kurs Photoshop Hier möchten wir Ihnen gerne einen Überblick über die verschiedenen Themen, die wir im Kurs mit Ihnen bearbeiten, vorstellen. Gerne beraten wir Sie natürlich auch persönlich.
Lehrplan zum Kurs Photoshop Hier möchten wir Ihnen gerne einen Überblick über die verschiedenen Themen, die wir im Kurs mit Ihnen bearbeiten, vorstellen. Gerne beraten wir Sie natürlich auch persönlich.
Informatik-Sommercamp 2012. Mastermind mit dem Android SDK
 Mastermind mit dem Android SDK Übersicht Einführungen Mastermind und Strategien (Stefan) Eclipse und das ADT Plugin (Jan) GUI-Programmierung (Dominik) Mastermind und Strategien - Übersicht Mastermind Spielregeln
Mastermind mit dem Android SDK Übersicht Einführungen Mastermind und Strategien (Stefan) Eclipse und das ADT Plugin (Jan) GUI-Programmierung (Dominik) Mastermind und Strategien - Übersicht Mastermind Spielregeln
Wir arbeiten mit Zufallszahlen
 Abb. 1: Bei Kartenspielen müssen zu Beginn die Karten zufällig ausgeteilt werden. Wir arbeiten mit Zufallszahlen Jedesmal wenn ein neues Patience-Spiel gestartet wird, muss das Computerprogramm die Karten
Abb. 1: Bei Kartenspielen müssen zu Beginn die Karten zufällig ausgeteilt werden. Wir arbeiten mit Zufallszahlen Jedesmal wenn ein neues Patience-Spiel gestartet wird, muss das Computerprogramm die Karten
2D to 3D Technologie
 Copyright by GDESIGN Vertriebsgesellschaft Einführung Der Einsatz von CAD-Werkzeugen und -Techniken gehört heute zum Standard. Immer mehr Unternehmen arbeiten daran, ihre bisherige 2D-Konstruktion auf
Copyright by GDESIGN Vertriebsgesellschaft Einführung Der Einsatz von CAD-Werkzeugen und -Techniken gehört heute zum Standard. Immer mehr Unternehmen arbeiten daran, ihre bisherige 2D-Konstruktion auf
LED Beleuchtung - Fehlerbetrachtung bei der Beleuchtungsstärkemessung
 LED Beleuchtung - Fehlerbetrachtung bei der Beleuchtungsstärkemessung Bei einem Beleuchtungsstärkemessgerät ist eines der wichtigsten Eigenschaften die Anpassung an die Augenempfindlichkeit V(λ). V(λ)
LED Beleuchtung - Fehlerbetrachtung bei der Beleuchtungsstärkemessung Bei einem Beleuchtungsstärkemessgerät ist eines der wichtigsten Eigenschaften die Anpassung an die Augenempfindlichkeit V(λ). V(λ)
Kurzeinweisung. WinFoto Plus
 Kurzeinweisung WinFoto Plus Codex GmbH Stand 2012 Inhaltsverzeichnis Einleitung... 3 Allgemeines... 4 Vorbereitungen... 4 Drucken des Baustellenblatts im Projekt... 4 Drucken des Barcodes auf dem Arbeitsauftrag
Kurzeinweisung WinFoto Plus Codex GmbH Stand 2012 Inhaltsverzeichnis Einleitung... 3 Allgemeines... 4 Vorbereitungen... 4 Drucken des Baustellenblatts im Projekt... 4 Drucken des Barcodes auf dem Arbeitsauftrag
Online Schulung Anmerkungen zur Durchführung
 Online Schulung Anmerkungen zur Durchführung 1.0 Einleitung Vielen Dank, dass Sie sich für die Online Schulung von SoloProtect entschieden haben. Nachfolgend finden Sie Informationen für Identicomnutzer
Online Schulung Anmerkungen zur Durchführung 1.0 Einleitung Vielen Dank, dass Sie sich für die Online Schulung von SoloProtect entschieden haben. Nachfolgend finden Sie Informationen für Identicomnutzer
Wir machen neue Politik für Baden-Württemberg
 Wir machen neue Politik für Baden-Württemberg Am 27. März 2011 haben die Menschen in Baden-Württemberg gewählt. Sie wollten eine andere Politik als vorher. Die Menschen haben die GRÜNEN und die SPD in
Wir machen neue Politik für Baden-Württemberg Am 27. März 2011 haben die Menschen in Baden-Württemberg gewählt. Sie wollten eine andere Politik als vorher. Die Menschen haben die GRÜNEN und die SPD in
Herstellen von Symbolen mit Corel Draw ab Version 9
 Herstellen von Symbolen mit Corel Draw ab Version 9 Einleitung : Icon Design-Überblick: 1) Gestalten in Corel Draw 10.0 3) Vorlage für Photopaint für Import von Corel 4) Einfügen in die PSD-Datei und Bearbeiten
Herstellen von Symbolen mit Corel Draw ab Version 9 Einleitung : Icon Design-Überblick: 1) Gestalten in Corel Draw 10.0 3) Vorlage für Photopaint für Import von Corel 4) Einfügen in die PSD-Datei und Bearbeiten
Fachbericht zum Thema: Anforderungen an ein Datenbanksystem
 Fachbericht zum Thema: Anforderungen an ein Datenbanksystem von André Franken 1 Inhaltsverzeichnis 1 Inhaltsverzeichnis 1 2 Einführung 2 2.1 Gründe für den Einsatz von DB-Systemen 2 2.2 Definition: Datenbank
Fachbericht zum Thema: Anforderungen an ein Datenbanksystem von André Franken 1 Inhaltsverzeichnis 1 Inhaltsverzeichnis 1 2 Einführung 2 2.1 Gründe für den Einsatz von DB-Systemen 2 2.2 Definition: Datenbank
Manuelle Konfiguration einer VPN Verbindung. mit Microsoft Windows 7
 Manuelle Konfiguration einer VPN Verbindung mit Microsoft Windows 7 Vorbemerkung In dieser kleinen Dokumentation wird beschrieben, wie eine verschlüsselte VPN Verbindung zur BVS GmbH & Co aufgebaut werden
Manuelle Konfiguration einer VPN Verbindung mit Microsoft Windows 7 Vorbemerkung In dieser kleinen Dokumentation wird beschrieben, wie eine verschlüsselte VPN Verbindung zur BVS GmbH & Co aufgebaut werden
Berechnung der Erhöhung der Durchschnittsprämien
 Wolfram Fischer Berechnung der Erhöhung der Durchschnittsprämien Oktober 2004 1 Zusammenfassung Zur Berechnung der Durchschnittsprämien wird das gesamte gemeldete Prämienvolumen Zusammenfassung durch die
Wolfram Fischer Berechnung der Erhöhung der Durchschnittsprämien Oktober 2004 1 Zusammenfassung Zur Berechnung der Durchschnittsprämien wird das gesamte gemeldete Prämienvolumen Zusammenfassung durch die
Hinweis, sofern Sie Probleme beim Download der Excel-Dateien für das LIOS-Makro haben:
 Hinweis, sofern Sie Probleme beim Download der Excel-Dateien für das LIOS-Makro haben: Genereller Hinweis: Bitte öffnen/speichern Sie die Download-Datei nicht mit Excel, bevor sie diese nicht über das
Hinweis, sofern Sie Probleme beim Download der Excel-Dateien für das LIOS-Makro haben: Genereller Hinweis: Bitte öffnen/speichern Sie die Download-Datei nicht mit Excel, bevor sie diese nicht über das
Bedienungshinweise für das Smartboard. Basisfunktionen
 Bedienungshinweise für das Smartboard Basisfunktionen Im Raum 6A 123 steht für die Lehre ein interaktives Whiteboard (Smartboard) zur Verfügung. Nachstehend werden die einfachsten Basisfunktionen erläutert,
Bedienungshinweise für das Smartboard Basisfunktionen Im Raum 6A 123 steht für die Lehre ein interaktives Whiteboard (Smartboard) zur Verfügung. Nachstehend werden die einfachsten Basisfunktionen erläutert,