Prof. Dr. Rudolf Bierl
|
|
|
- Meike Richter
- vor 8 Jahren
- Abrufe
Transkript
1

2 Agenda Informationsverarbeitung Lego Roboter Sensoren Projekte Scanner Teekocher Rubics Cube Solver Sudoku Solver

3 Informationsverarbeitung Definition Elektronische Datenverarbeitung EDV folgt dem Grundschema des so genannten EVA-Prinzip (Eingabe-Verarbeitung-Ausgabe). Rechner empfangen Daten, verarbeiten diese entsprechend der im Programm kodierten Verarbeitungsvorschrift und produzieren den im Programm spezifizierten Ausgabe. Das grundlegende Konzept der EDV befasst sich also mit den erforderlichen Eingangs- und Ausgangsdaten, deren Strukturbeschreibung und den Verarbeitungsregeln zur Transformation der Eingangsdaten in die Ausgangsdaten. Dies impliziert, dass zuerst die grundlegenden Datenstrukturen definiert werden, bevor man sich mit der Verarbeitungslogik befasst. Die Datenverarbeitungstechnik ist mit der Informationstechnik verwandt. Der Terminus Datenverarbeitung wird in der Moderne tendenziell für administrative Vorgänge verwendet. Doch sollte dies nicht darüber hinwegtäuschen, dass die Firma IBM in den 1950-er Jahren auch ihre für wissenschaftliche Anwendungen bereitgestellten Systeme als Electronic Data-Processing Machines (Elektronische Datenverarbeitungsmaschinen) bezeichnete.

4 Informationsverarbeitung Gerhard Leitner IAS, Universität Klagenfurt
 IAS, Universität")
5 Informationsverarbeitung Lange Zeit ein Problem:

6 Agenda Informationsverarbeitung Lego Roboter Sensoren Projekte Scanner Teekocher Rubics Cube Solver Sudoku Solver

7 LEGO MINDSTORMS NXT LEGO Mindstorms NXT.. Was ist das?

8 Plattform

9 MINDSTORMS NXT Warum ist das interessant?

10
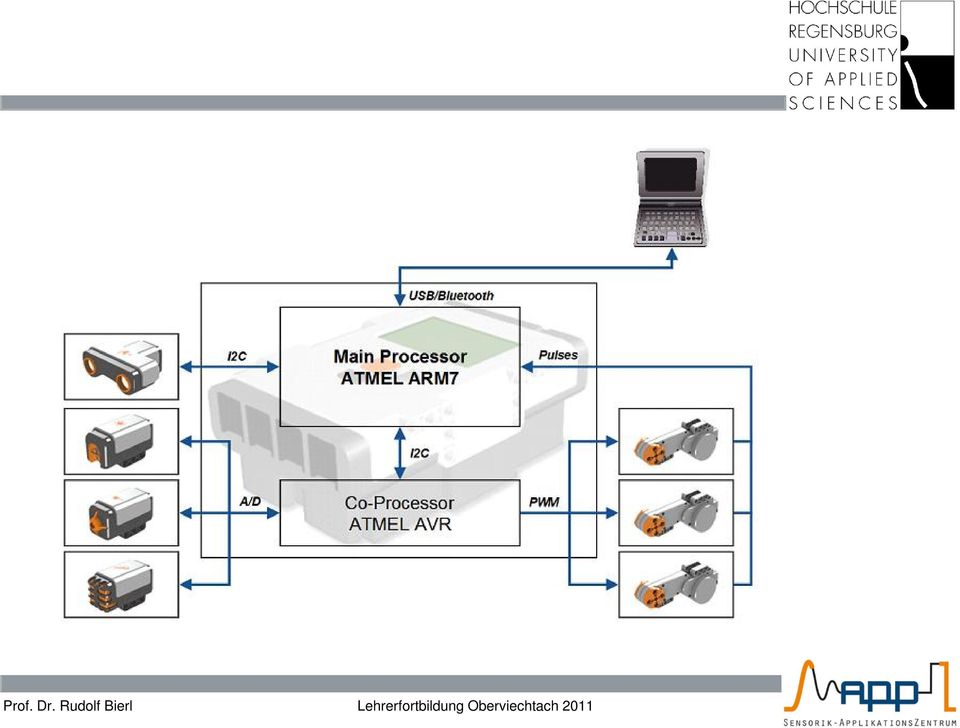
11 NXT Baustein 32-bit ARM7 Mikroprozessor 256kbyte FLASH- und 64kbyte RAM-Speicher Unbegrenzte Anzahl an Programmspeicherplätzen Bluetooth Technologie ermöglich die kabellose Kommunikation zwischen NXT Stein, Computern, PDAs und Mobiltelefonen USB 2.0 Anschluss 4 Eingänge für Sensoren 3 Ausgänge für Motoren und Lämpchen Programmierbares, graphisches Display (60 x 100 Pixel) Lautsprecher Design und Handhabung ist auf LEGO TECHNIC Konstruktionssystem abgestimmt

12 MINDSTORMS NXT

13 A Look Inside
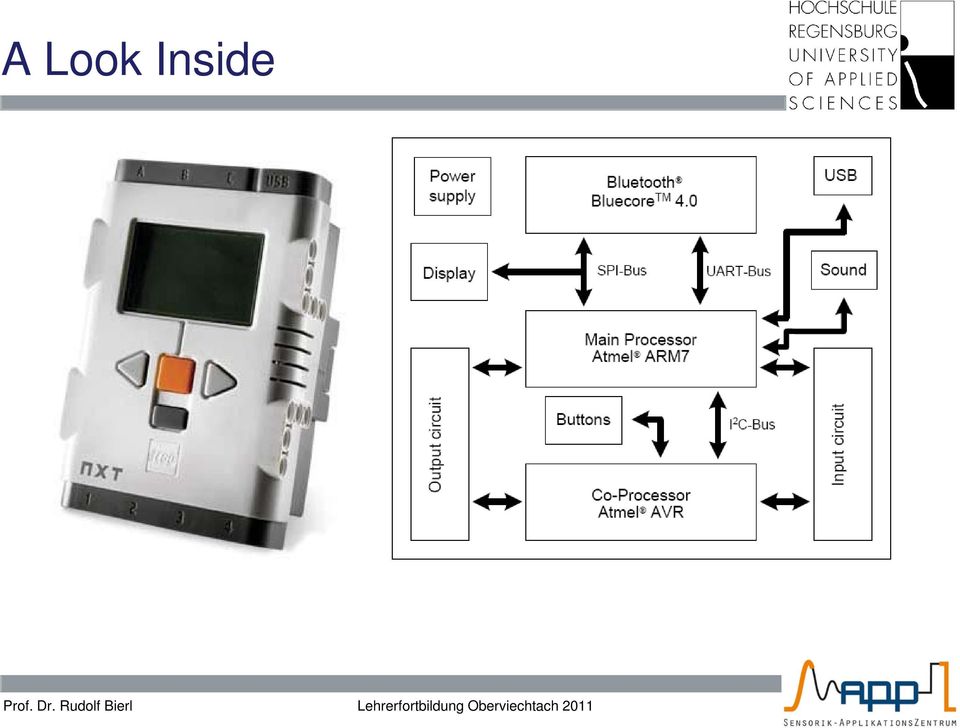
14 Rapid Prototyping with MINDSTORMS NXT Communication 32-bit processor Analog and digital I/O Processor for I/O logic

15 Programmier - Methoden PC /LabVIEW RWTH Aachen

16 Powered by LabVIEW

17 Beispiele: Linienfolger

18 Beispiele: Linienfolger geregelt

19 NXT Steuerung mit Handy
20 Agenda Informationsverarbeitung Lego Roboter Sensoren Projekte Scanner Teekocher Rubics Cube Solver Sudoku Solver

21 Lichtsensor
22 Ultraschallsensor RWTH Aachen
23 Agenda Informationsverarbeitung Lego Roboter Sensoren Projekte Scanner Teekocher Rubics Cube Solver Sudoku Solver
24 Scanner RWTH Aachen
25 Bildverarbeitung Gleitende Mittelwerts Interpolation
26 Agenda Informationsverarbeitung Lego Roboter Sensoren Projekte Scanner Teekocher Rubics Cube Solver Sudoku Solver
27 Projekt: Automatischer Teekocher Idee: Aufbau eines vollautomatischen Teekochers, der übers Internet gesteuert werden kann und dessen Zustand über ein WEB- Kamerabild überwacht wird
28 Ablauf Warten auf Startzeit Wasser auffüllen Ultraschallsensor misst Füllstand; falls Füllstand unter Minimum Auffüllen Wasser kochen Temperatur wird mit T-Fühler gemessen; Heizen bis Grenztemperatur erreicht ist Teekochen Teebeutel in Wasser absenken; Ziehzeit entsprechend Benutzereingabe; Teebeutel entfernen; Warmhalten
29 Aufbauskizze US-Sensor T-Fühler Teebeutel Befüllen Heizen Warmhalten
30 Oberfläche
31 Programm: Beispiel Auffüllen
32 Agenda Informationsverarbeitung Lego Roboter Sensoren Projekte Scanner Teekocher Rubics Cube Solver Sudoku Solver
33 Projekt: Rubics Cube Solver Funktionsgliederung Schnittstellendefinition Bilderfassung/ bearbeitung 1D-Array -Farbanordnung Logik Operationsberechnung 1D-Array - Drehoperationen Ansteuerung der Mechanik
34 Definition der Würfelflächen Positionen Fläche 1 Fläche 2 Fläche Fläche 4 Fläche Fläche Farbcodierung der Elemente abgebildet in: 1D-Farbarray (54 Elemente)
35 SENSORIK: EINLESEN UND ERKENNEN
36 Soft-Hardware Einstellungen Labview IMAQ Vision.NET Framework
37 Konzept - Farberkennung Eingabe Bildverarbeitung Ausgabe(Schnittstelle) Farbelement 1. Bildaufnahme 2. Masken positionieren 3. Farberkennung 4. Farbkodierung
38 Würfelseiten einlesen Bild aufnehmen Masken zeichnen RGB Werte ermitteln (Diagonale Linie)
39 RGB Werte ermitteln Pixel auf der Diagonale RGB Werte Summieren Arrays übergeben(schnittstelle)
40 Farberkennung und Kodierung R + G + B = RGB R/RGB G/RGB B/RGB = R G B > < Kodierung
41 ALGORITHMUS
42 Der Logikaufbau Würfelelemente finden -Ermittlung der Mittel-, Kanten- und Eckelemente -Zuordnung der Elemente zur Würfelposition Würfel prüfen -ermittelt nächstes Farbelement zur Lösung Zug ermitteln -ermittelt für das Farbelement die jeweilige Drehoperation Zug ausführen -Berechnung des virtuellen Würfelaufbaus nach Durchführung der Drehoperation 1D-Array -Farbinformationen des Würfels 1D-Array -berechnete Drehoperationen
43 Vorgehensweise Lösungsansatz 1. Kantenelemente der ersten Ebene 2. Eckstücke der ersten Ebene 3. Kantenstücke der zweiten Ebene 4. Kantenelemente der dritten Ebene Festlegung der Referenzfarbe Ebene 1 Ebene 2 Ebene 3 5. Eckstücke der dritten Ebene
44 Würfelelemente finden 1D-Farbarray (54 Elemente) Elementdefinition Position 1 Position 2 Position Mitte Fläche 2 Ecke 2 Fläche 1 Array: Zuordnung Farben/Position/Elementtyp (Mitte, Kante, Ecke) Farbe 1/Fläche/ Position 2(5) Farbe 2/Fläche/ Position Farbe 3/Fläche/ Position 2(3) 5(43) 3(10) Flächennummer (Position)
45 Würfel prüfen Array Zuordnung: Farben/Position/Elementtyp (Mitte, Kante, Ecke) Mitten Ecke Kante Position 1/ Fläche 2(14) 3(23) 5(41) Position 2/ Fläche Position 3/ Fläche 2(12) 3(19) 5(45) 6(51) 3(26) ausgehend von Referenzfarbe: -Elemente nach Ebenen prüfen -Elemente der Ebenen für jede Ref.farbe bekannt Bsp. Gelb als Ref.
46 Würfel prüfen Array Zuordnung: Vergleich Flächen der Mitten mit den jeweiligen der Kanten/Eckenelementen Bsp. Mitte Flächennummer (Position) Farbe 2(14) 3(23) 4(41) letztes zu prüfende Ecke Ebene 1 2(12) 3(19) 4(45) Flächen passen Ebene 1 vollständig erste zu prüfende Kante Ebene 2 6(51) 3(26) Flächen stimmen nicht mit Mitten überein Weitergabe Elementinformationen an die Logikberechnung
47 Zug ermitteln (Normposition) Array Zuordnung: Flächennummer (Position) Farbe 2(14) 3(23) Arbeitsfarbe Referenzfarbe 4(41) Lösungsansatz 1. Referenzfarbe auf Fläche 5 2. Arbeitsfarbe auf Fläche 1 3. Neuberechnung Array Zuordnung 6(51) 3(26) Würfeldrehung nach links gefordert
48 Zug ermitteln (Normposition) Flächennummer (Position) Farbe 2(14) 3(23) 4(41) 6(51) 3(26) Flächennummer (Position) Farbe 1(5) 2(14) 4(41) 2(47) 3(17) Weitergabe Elementinformationen an die Logikfindung
49 Zug ermitteln Array Zuordnung: 6(51) 3(26) Drehoperationen aus Logiktabelle anhand der Elementposition ermitteln erste Drehoperation
50 Mögliche Operationen der Mechanik Ebene 3 nach links 1 Ebene 3 nach rechts 2 Würfel auf 5 Würfel links drehen 3 Würfel rechts drehen 4 Würfel ab 5
51 Zug ausführen Problematik: nicht jede Drehoperation kann direkt durch die Mechanik umgesetzt werden Drehteller kann nur Ebene 3 drehen Positionierungsoperationen benötigt direkte Ausführung möglich direkte Ausführung nicht möglich
52 Zug ausführen ermittelter Zug der Logik Würfel rechts drehen 4 Würfel ab 5 Array mit reellen Dreh/Positionieroperationen: Weitergabe an Mechanikansteuerung Neuberechnung Würfelaufbau/lage Ermittlung des nächsten Zugs (Neustart der Prozedur) Ebene 3 nach links 1
53 Übersicht Eigenschaften der Programmarchitektur modularer Aufbau unterschiedliche Lösungsmethoden integrierbar Simulation verschiedener Lösungswege möglich
54 AKTUATORIK
55 Mechanik Anforderung: Alle sechs Seiten des Würfels müssen verdreht werden können Lösung: Zwei Achsen drehbar und an einer Position ist der Würfel zu verdrehen -> Drehung über die dritte Achse wird über je eine Drehung an den beiden anderen Achsen realisiert
56 Mechanik - Antriebe - Antrieb 1 Drehung in vertikaler Achse - Antrieb 2 Aufnahme horizontale Achse - Antrieb 3 Plattform auf/ab - Drehung horizontale Achse über eine Kupplung an Antrieb 1 - Verdrehen mit Aufnahme horizontaler Achse und Drehung um vertikale Achse
57 Mechanik - Grundfunktionen Grundfunktion Auf/Ab Position oben: Aufnahme horizontale Achse zum drehen um horizontale Achse Position mitte: Aufnahme horizontale Achse zum Verdrehen des Würfels Position unten: Einkuppeln für Drehung um horizontale Achse Kalibrierung über NXT - Berührungssensor
58 Mechanik - Grundfunktionen Grundfunktion Drehen Funktionen: - drehen um 90 Grad rechts - drehen um 90 Grad links - drehen um für horizontale und vertikale Drehung Probleme mit Relativdrehung -> Abweichungen -> Drehung auf Absolutwert Kalibrierung über NXT - Lichtsensor
59 Mechanik - Grundfunktionen Grundfunktion Aufnahme horizontale Achse Position: - offen - halb offen - geschlossen Position geschlossen wird durch Absinken der Klemmgeschwindigkeit erkannt Kalibrierung über NXT - Berührungssensor
60 Mechanik - Drehbefehle Drehbefehle Schnittstelle zum vorangegangen Modul: Array mit Drehbefehlen (1-6) 1. Verdrehen links 2. Verdrehen rechts 3. Drehen links 4. Drehen rechts 5. Drehen auf 6. Drehen ab 7. Verdrehen Drehen 180 links/rechts 9. Drehen 180 auf/ab
61 Mechanik Drehbefehle Beispiel Drehbefehle - Drehbefehle bestehen aus mehreren Grundfunktionen - Grundstellung: Aufnahme horizontale Achse ist halb offen!!! - Beispiel: Drehen auf Position oben Klemmen Position unten Drehen nach vorne Position mitte Tisch ausrichten Position oben Klemmung halb auf Fehler- Korrektur
62 Agenda Informationsverarbeitung Lego Roboter Sensoren Projekte Scanner Teekocher Rubics Cube Solver Sudoku Solver
63 Information First Lego League Regionalwettbewerb an der Hochschule Regensburg; P-Seminare mit Lego Roboter; Ansprechpartner: Armin Gardeia TelNr.: 0941/
64 Danke für die Aufmerksamkeit und viel Spaß beim Spielen!
Lego Roboter mit NXT-G programmieren. Hochschule Mannheim
 Lego Roboter mit NXT-G programmieren Hochschule Mannheim Die Programmiersprache NXT - G Grafische Programmiersprache zur Programmierung von Lego Robotern vom Typ NXT Das Programm Mindstorms NXT-G wird
Lego Roboter mit NXT-G programmieren Hochschule Mannheim Die Programmiersprache NXT - G Grafische Programmiersprache zur Programmierung von Lego Robotern vom Typ NXT Das Programm Mindstorms NXT-G wird
[ Experiment- und Datenprotokollierung. mit der EV3 Software]
![[ Experiment- und Datenprotokollierung. mit der EV3 Software]](/thumbs/39/18075793.jpg "[ Experiment- und Datenprotokollierung. mit der EV3 Software]") 2013 [ Experiment- und Datenprotokollierung mit der EV3 Software] Experiment Datenprotokollierung Es gibt zwei Möglichkeiten um die Datenaufzeichnung durchzuführen. Eine besteht darin, die Datenprotokollierung
2013 [ Experiment- und Datenprotokollierung mit der EV3 Software] Experiment Datenprotokollierung Es gibt zwei Möglichkeiten um die Datenaufzeichnung durchzuführen. Eine besteht darin, die Datenprotokollierung
ZfP-Sonderpreis der DGZfP beim Regionalwettbewerb Jugend forscht BREMERHAVEN. Der Zauberwürfel-Roboter. Paul Giese. Schule: Wilhelm-Raabe-Schule
 ZfP-Sonderpreis der DGZfP beim Regionalwettbewerb Jugend forscht BREMERHAVEN Der Zauberwürfel-Roboter Paul Giese Schule: Wilhelm-Raabe-Schule Jugend forscht 2013 Kurzfassung Regionalwettbewerb Bremerhaven
ZfP-Sonderpreis der DGZfP beim Regionalwettbewerb Jugend forscht BREMERHAVEN Der Zauberwürfel-Roboter Paul Giese Schule: Wilhelm-Raabe-Schule Jugend forscht 2013 Kurzfassung Regionalwettbewerb Bremerhaven
Basisanforderungen: EVA-Prinzips. Erweiterte Anforderungen: wirtschaftlichen und privaten Alltag.
 Basisanforderungen: 1. Erstelle eine einfache Motor-Steuerung (siehe Anforderungen) 2. Erläutere den Begriff Steuerung. 3. Benenne die Sensoren und Aktoren dieser Steuerung. 4. Beschreibe die Informationsverarbeitung
Basisanforderungen: 1. Erstelle eine einfache Motor-Steuerung (siehe Anforderungen) 2. Erläutere den Begriff Steuerung. 3. Benenne die Sensoren und Aktoren dieser Steuerung. 4. Beschreibe die Informationsverarbeitung
schnell und portofrei erhältlich bei beck-shop.de DIE FACHBUCHHANDLUNG mitp/bhv
 Roboter programmieren mit NXC für Lego Mindstorms NXT 1. Auflage Roboter programmieren mit NXC für Lego Mindstorms NXT schnell und portofrei erhältlich bei beck-shop.de DIE FACHBUCHHANDLUNG mitp/bhv Verlag
Roboter programmieren mit NXC für Lego Mindstorms NXT 1. Auflage Roboter programmieren mit NXC für Lego Mindstorms NXT schnell und portofrei erhältlich bei beck-shop.de DIE FACHBUCHHANDLUNG mitp/bhv Verlag
Vorbereitungsaufgaben
 Praktikum Bildverarbeitung / Bildinformationstechnik Versuch BV 4 / BIT 3: Mustererkennung Paddy Gadegast, CV00, 160967 Alexander Opel, CV00, 16075 Gruppe 3 Otto-von-Guericke Universität Magdeburg Fakultät
Praktikum Bildverarbeitung / Bildinformationstechnik Versuch BV 4 / BIT 3: Mustererkennung Paddy Gadegast, CV00, 160967 Alexander Opel, CV00, 16075 Gruppe 3 Otto-von-Guericke Universität Magdeburg Fakultät
Eine Logikschaltung zur Addition zweier Zahlen
 Eine Logikschaltung zur Addition zweier Zahlen Grundlegender Ansatz für die Umsetzung arithmetischer Operationen als elektronische Schaltung ist die Darstellung von Zahlen im Binärsystem. Eine Logikschaltung
Eine Logikschaltung zur Addition zweier Zahlen Grundlegender Ansatz für die Umsetzung arithmetischer Operationen als elektronische Schaltung ist die Darstellung von Zahlen im Binärsystem. Eine Logikschaltung
SCHRITT 1: Öffnen des Bildes und Auswahl der Option»Drucken«im Menü»Datei«...2. SCHRITT 2: Angeben des Papierformat im Dialog»Drucklayout«...
 Drucken - Druckformat Frage Wie passt man Bilder beim Drucken an bestimmte Papierformate an? Antwort Das Drucken von Bildern ist mit der Druckfunktion von Capture NX sehr einfach. Hier erklären wir, wie
Drucken - Druckformat Frage Wie passt man Bilder beim Drucken an bestimmte Papierformate an? Antwort Das Drucken von Bildern ist mit der Druckfunktion von Capture NX sehr einfach. Hier erklären wir, wie
Wie Sie mit Mastern arbeiten
 Wie Sie mit Mastern arbeiten Was ist ein Master? Einer der großen Vorteile von EDV besteht darin, dass Ihnen der Rechner Arbeit abnimmt. Diesen Vorteil sollten sie nutzen, wo immer es geht. In PowerPoint
Wie Sie mit Mastern arbeiten Was ist ein Master? Einer der großen Vorteile von EDV besteht darin, dass Ihnen der Rechner Arbeit abnimmt. Diesen Vorteil sollten sie nutzen, wo immer es geht. In PowerPoint
Konzepte der Informatik
 Konzepte der Informatik Vorkurs Informatik zum WS 2011/2012 26.09. - 30.09.2011 17.10. - 21.10.2011 Dr. Werner Struckmann / Christoph Peltz Stark angelehnt an Kapitel 1 aus "Abenteuer Informatik" von Jens
Konzepte der Informatik Vorkurs Informatik zum WS 2011/2012 26.09. - 30.09.2011 17.10. - 21.10.2011 Dr. Werner Struckmann / Christoph Peltz Stark angelehnt an Kapitel 1 aus "Abenteuer Informatik" von Jens
Installation OMNIKEY 3121 USB
 Installation OMNIKEY 3121 USB Vorbereitungen Installation PC/SC Treiber CT-API Treiber Einstellungen in Starke Praxis Testen des Kartenlesegeräts Vorbereitungen Bevor Sie Änderungen am System vornehmen,
Installation OMNIKEY 3121 USB Vorbereitungen Installation PC/SC Treiber CT-API Treiber Einstellungen in Starke Praxis Testen des Kartenlesegeräts Vorbereitungen Bevor Sie Änderungen am System vornehmen,
QR Code. Christina Nemecek, Jessica Machrowiak
 QR Code Christina Nemecek, Jessica Machrowiak 1 Inhaltsangabe. Einführung Definition Entstehung Grundlagen Aufbau Fehlertoleranz und -erkennung Generieren des QR Codes Lesen des QR Codes Quellen 2 Einführung.
QR Code Christina Nemecek, Jessica Machrowiak 1 Inhaltsangabe. Einführung Definition Entstehung Grundlagen Aufbau Fehlertoleranz und -erkennung Generieren des QR Codes Lesen des QR Codes Quellen 2 Einführung.
Ihre Interessentendatensätze bei inobroker. 1. Interessentendatensätze
 Ihre Interessentendatensätze bei inobroker Wenn Sie oder Ihre Kunden die Prozesse von inobroker nutzen, werden Interessentendatensätze erzeugt. Diese können Sie direkt über inobroker bearbeiten oder mit
Ihre Interessentendatensätze bei inobroker Wenn Sie oder Ihre Kunden die Prozesse von inobroker nutzen, werden Interessentendatensätze erzeugt. Diese können Sie direkt über inobroker bearbeiten oder mit
Es gibt zwei Wege die elektronischen Daten aus Navision zu exportieren.
 Elektronische Daten aus Navision (Infoma) exportieren Es gibt zwei Wege die elektronischen Daten aus Navision zu exportieren. 1. GDPdU 1.1 Manuelle Einrichtung der GDPdU-Definitionsgruppe und Ausführung
Elektronische Daten aus Navision (Infoma) exportieren Es gibt zwei Wege die elektronischen Daten aus Navision zu exportieren. 1. GDPdU 1.1 Manuelle Einrichtung der GDPdU-Definitionsgruppe und Ausführung
Zahlen und das Hüten von Geheimnissen (G. Wiese, 23. April 2009)
") Zahlen und das Hüten von Geheimnissen (G. Wiese, 23. April 2009) Probleme unseres Alltags E-Mails lesen: Niemand außer mir soll meine Mails lesen! Geld abheben mit der EC-Karte: Niemand außer mir soll
Zahlen und das Hüten von Geheimnissen (G. Wiese, 23. April 2009) Probleme unseres Alltags E-Mails lesen: Niemand außer mir soll meine Mails lesen! Geld abheben mit der EC-Karte: Niemand außer mir soll
Sicherheit im Online-Banking. Verfahren und Möglichkeiten
 Sicherheit im Online-Banking Verfahren und Möglichkeiten Auf unterschiedlichen Wegen an das gleiche Ziel: Sicherheit im Online-Banking Wie sicher ist Online-Banking? Diese Frage stellt sich den Bankkunden
Sicherheit im Online-Banking Verfahren und Möglichkeiten Auf unterschiedlichen Wegen an das gleiche Ziel: Sicherheit im Online-Banking Wie sicher ist Online-Banking? Diese Frage stellt sich den Bankkunden
Was unterscheidet Microcontroller von einem PC ( Laptop ) oder einem Handy
 oder einem Handy") uc_kurs_mts_hl_1 Seite 1 S1 Was unterscheidet Microcontroller von einem PC ( Laptop ) oder einem Handy An einen uc kann man eine Menge Sensoren und Aktuatoren anschließen. Mit den Sensoren kann der uc
uc_kurs_mts_hl_1 Seite 1 S1 Was unterscheidet Microcontroller von einem PC ( Laptop ) oder einem Handy An einen uc kann man eine Menge Sensoren und Aktuatoren anschließen. Mit den Sensoren kann der uc
WORKSHOP für das Programm XnView
 WORKSHOP für das Programm XnView Zur Bearbeitung von Fotos für die Nutzung auf Websites und Online Bildergalerien www.xnview.de STEP 1 ) Bild öffnen und Größe ändern STEP 2 ) Farbmodus prüfen und einstellen
WORKSHOP für das Programm XnView Zur Bearbeitung von Fotos für die Nutzung auf Websites und Online Bildergalerien www.xnview.de STEP 1 ) Bild öffnen und Größe ändern STEP 2 ) Farbmodus prüfen und einstellen
MH - Gesellschaft für Hardware/Software mbh
 E.d.a.s.VX Mobiles Messwerterfassungssystem Das E.d.a.s.VX System ist für mobile Einsätze am 12 Volt DC Bordnetz designed. Es ist in der Lage Messungen mit einer Summenabtastrate von bis zu 3 000 000 Messwerten
E.d.a.s.VX Mobiles Messwerterfassungssystem Das E.d.a.s.VX System ist für mobile Einsätze am 12 Volt DC Bordnetz designed. Es ist in der Lage Messungen mit einer Summenabtastrate von bis zu 3 000 000 Messwerten
Benutzerhandbuch. Leitfaden zur Benutzung der Anwendung für sicheren Dateitransfer.
 Benutzerhandbuch Leitfaden zur Benutzung der Anwendung für sicheren Dateitransfer. 1 Startseite Wenn Sie die Anwendung starten, können Sie zwischen zwei Möglichkeiten wählen 1) Sie können eine Datei für
Benutzerhandbuch Leitfaden zur Benutzung der Anwendung für sicheren Dateitransfer. 1 Startseite Wenn Sie die Anwendung starten, können Sie zwischen zwei Möglichkeiten wählen 1) Sie können eine Datei für
TeamSpeak3 Einrichten
 TeamSpeak3 Einrichten Version 1.0.3 24. April 2012 StreamPlus UG Es ist untersagt dieses Dokument ohne eine schriftliche Genehmigung der StreamPlus UG vollständig oder auszugsweise zu reproduzieren, vervielfältigen
TeamSpeak3 Einrichten Version 1.0.3 24. April 2012 StreamPlus UG Es ist untersagt dieses Dokument ohne eine schriftliche Genehmigung der StreamPlus UG vollständig oder auszugsweise zu reproduzieren, vervielfältigen
Verfahren zur Erstellung eines Schnittmusters als 3D-Modellierung
 Verfahren zur Erstellung eines Schnittmusters als 3D-Modellierung 1 Stand der Technik Die Massenfertigung von Bekleidung erfolgt heute nach standardisierten Kleidergrößen. Als Grundlage dafür dienen Konstruktionsschnitte.
Verfahren zur Erstellung eines Schnittmusters als 3D-Modellierung 1 Stand der Technik Die Massenfertigung von Bekleidung erfolgt heute nach standardisierten Kleidergrößen. Als Grundlage dafür dienen Konstruktionsschnitte.
Getting Started General Workflow. Anlegen von Schablonen Ausrichtung 3.2. Atoms Precision V2 Tutorial. Working with Images Direct from Camera
 Getting Started General Workflow Anlegen von Schablonen Ausrichtung 3.2 Atoms Precision V2 Tutorial Working with Images Direct from Camera Die Ausrichtungseinstellungen ermöglichen die Ausrichtung der
Getting Started General Workflow Anlegen von Schablonen Ausrichtung 3.2 Atoms Precision V2 Tutorial Working with Images Direct from Camera Die Ausrichtungseinstellungen ermöglichen die Ausrichtung der
HIT-Software Installieren und Starten der Netzwerklizenz als Download-Anwendung
 HIT-Software Installieren und Starten der Netzwerklizenz als Download-Anwendung Grundsätzliches Die HIT-Software ist eines der drei Module des Lernkonzepts HEIDENHAIN Interactive Training für Steuerungen
HIT-Software Installieren und Starten der Netzwerklizenz als Download-Anwendung Grundsätzliches Die HIT-Software ist eines der drei Module des Lernkonzepts HEIDENHAIN Interactive Training für Steuerungen
Pilot Drivers Package. Handbuch
 Pilot Drivers Package Handbuch 2 Pilot Drivers Package Haftung für Irrtümer und Druckfehler ausgeschlossen. Pilot_Drivers_Package.01.20140903.0 Pilot Drivers Package Pilot_Drivers_Package.01.20140903.0
Pilot Drivers Package Handbuch 2 Pilot Drivers Package Haftung für Irrtümer und Druckfehler ausgeschlossen. Pilot_Drivers_Package.01.20140903.0 Pilot Drivers Package Pilot_Drivers_Package.01.20140903.0
Vermessung und Verständnis von FFT Bildern
 Vermessung und Verständnis von FFT Bildern Viele Auswertungen basieren auf der "Fast Fourier Transformation" FFT um die (ungewünschten) Regelmäßigkeiten im Schliffbild darzustellen. Die Fourier-Transformation
Vermessung und Verständnis von FFT Bildern Viele Auswertungen basieren auf der "Fast Fourier Transformation" FFT um die (ungewünschten) Regelmäßigkeiten im Schliffbild darzustellen. Die Fourier-Transformation
Zeichen bei Zahlen entschlüsseln
 Zeichen bei Zahlen entschlüsseln In diesem Kapitel... Verwendung des Zahlenstrahls Absolut richtige Bestimmung von absoluten Werten Operationen bei Zahlen mit Vorzeichen: Addieren, Subtrahieren, Multiplizieren
Zeichen bei Zahlen entschlüsseln In diesem Kapitel... Verwendung des Zahlenstrahls Absolut richtige Bestimmung von absoluten Werten Operationen bei Zahlen mit Vorzeichen: Addieren, Subtrahieren, Multiplizieren
Übungen zur Softwaretechnik
 Technische Universität München Fakultät für Informatik Lehrstuhl IV: Software & Systems Engineering Markus Pister, Dr. Bernhard Rumpe WS 2002/2003 Lösungsblatt 9 17. Dezember 2002 www4.in.tum.de/~rumpe/se
Technische Universität München Fakultät für Informatik Lehrstuhl IV: Software & Systems Engineering Markus Pister, Dr. Bernhard Rumpe WS 2002/2003 Lösungsblatt 9 17. Dezember 2002 www4.in.tum.de/~rumpe/se
METTLER TOLEDO USB-Option Installation der Treiber unter Windows XP
 Diese Anleitung beschreibt den Ablauf bei der Installation und Deinstallation der Treiber für die METTLER TOLEDO USB-Option unter Windows XP. Die USB-Option wird als zusätzliche serielle Schnittstelle
Diese Anleitung beschreibt den Ablauf bei der Installation und Deinstallation der Treiber für die METTLER TOLEDO USB-Option unter Windows XP. Die USB-Option wird als zusätzliche serielle Schnittstelle
Erstellen einer digitalen Signatur für Adobe-Formulare
 Erstellen einer digitalen Signatur für Adobe-Formulare (Hubert Straub 24.07.13) Die beiden Probleme beim Versenden digitaler Dokumente sind einmal die Prüfung der Authentizität des Absenders (was meist
Erstellen einer digitalen Signatur für Adobe-Formulare (Hubert Straub 24.07.13) Die beiden Probleme beim Versenden digitaler Dokumente sind einmal die Prüfung der Authentizität des Absenders (was meist
Adobe Flash CS4»3D-Tool«
 Flash Tutorial Philipp Nunnemann Adobe Flash CS4»3D-Tool«Im folgenden Tutorial könnt Ihr das»3d-tool«in Adobe Flash CS4 kennenlernen. Das Tool erlaubt euch, Objekte im dreidimensionalen Raum zu bewegen.
Flash Tutorial Philipp Nunnemann Adobe Flash CS4»3D-Tool«Im folgenden Tutorial könnt Ihr das»3d-tool«in Adobe Flash CS4 kennenlernen. Das Tool erlaubt euch, Objekte im dreidimensionalen Raum zu bewegen.
Technical Note 24 SMS Versand über analoge und ISDN Leitungen (Festnetz-SMS)
") Technical Note 24 SMS Versand über analoge und ISDN Leitungen (Festnetz-SMS) TN_024_SMS_Versand_Festnetz.doc Angaben ohne Gewähr Irrtümer und Änderungen vorbehalten. Seite 1 von 8 1 Inhaltsverzeichnis
Technical Note 24 SMS Versand über analoge und ISDN Leitungen (Festnetz-SMS) TN_024_SMS_Versand_Festnetz.doc Angaben ohne Gewähr Irrtümer und Änderungen vorbehalten. Seite 1 von 8 1 Inhaltsverzeichnis
DE/AT Bedienungsanleitung. devireg 550
 DE/AT Bedienungsanleitung devireg 550 1 2 Ausgezeichnet mit dem Interaction Design Award Inhalt Einführung... Seite 3 Vorstellung des devireg 550... Seite 4 Der Gebrauch eines devireg 550... Seite 7 Einstellung
DE/AT Bedienungsanleitung devireg 550 1 2 Ausgezeichnet mit dem Interaction Design Award Inhalt Einführung... Seite 3 Vorstellung des devireg 550... Seite 4 Der Gebrauch eines devireg 550... Seite 7 Einstellung
BMW TREUE SERVICE. SRP MARKETING MODUL. ANLEITUNG ZUM EINSPIELEN DER LEUCHTTURMKAMPAGNEN IN DIE KSD.
 B6-A-0, 0.05.0 BMW TREUE SERVICE. SRP MARKETING MODUL. ANLEITUNG ZUM EINSPIELEN DER LEUCHTTURMKAMPAGNEN IN DIE KSD. Um die im SRP MM konfigurierten Marketing-Kampagnen für die Mitarbeiter im Kundenkontakt
B6-A-0, 0.05.0 BMW TREUE SERVICE. SRP MARKETING MODUL. ANLEITUNG ZUM EINSPIELEN DER LEUCHTTURMKAMPAGNEN IN DIE KSD. Um die im SRP MM konfigurierten Marketing-Kampagnen für die Mitarbeiter im Kundenkontakt
Update auf Windows 8.1 Schrittweise Anleitung
 Update auf Windows 8.1 Schrittweise Anleitung Windows 8.1 Installation und Aktualisierung BIOS, Anwendungen, Treiber aktualisieren und Windows Update ausführen Installationstyp auswählen Windows 8.1 installieren
Update auf Windows 8.1 Schrittweise Anleitung Windows 8.1 Installation und Aktualisierung BIOS, Anwendungen, Treiber aktualisieren und Windows Update ausführen Installationstyp auswählen Windows 8.1 installieren
Subpostfächer und Vertretungen für Unternehmen
 SCHRITT-FÜR-SCHRITT Seite 1 von 7 Subpostfächer und Vertretungen für Unternehmen Organisationsstruktur 1:1 abbilden Individuelle Postfächer für Abteilungen und/oder Mitarbeiter Unterschiedliche Berechtigungen
SCHRITT-FÜR-SCHRITT Seite 1 von 7 Subpostfächer und Vertretungen für Unternehmen Organisationsstruktur 1:1 abbilden Individuelle Postfächer für Abteilungen und/oder Mitarbeiter Unterschiedliche Berechtigungen
Mikrocontroller Grundlagen. Markus Koch April 2011
 Mikrocontroller Grundlagen Markus Koch April 2011 Übersicht Was ist ein Mikrocontroller Aufbau (CPU/RAM/ROM/Takt/Peripherie) Unterschied zum Mikroprozessor Unterschiede der Controllerarten Unterschiede
Mikrocontroller Grundlagen Markus Koch April 2011 Übersicht Was ist ein Mikrocontroller Aufbau (CPU/RAM/ROM/Takt/Peripherie) Unterschied zum Mikroprozessor Unterschiede der Controllerarten Unterschiede
Easy-Monitoring Universelle Sensor Kommunikations und Monitoring Plattform
 Easy-Monitoring Universelle Sensor Kommunikations und Monitoring Plattform Eberhard Baur Informatik Schützenstraße 24 78315 Radolfzell Germany Tel. +49 (0)7732 9459330 Fax. +49 (0)7732 9459332 Email: mail@eb-i.de
Easy-Monitoring Universelle Sensor Kommunikations und Monitoring Plattform Eberhard Baur Informatik Schützenstraße 24 78315 Radolfzell Germany Tel. +49 (0)7732 9459330 Fax. +49 (0)7732 9459332 Email: mail@eb-i.de
MC-Hx 010. Relative Feuchte und Temperatur der Luft messen und den Taupunkt nach h-x-mollier- Diagramm berechnen. MB DataTec GmbH. Stand: 06.
 MC-Hx 010 Relative Feuchte und Temperatur der Luft messen und den Taupunkt nach h-x-mollier- Diagramm berechnen MB DataTec GmbH Stand: 06.2014 Kontakt: MB DataTec GmbH Friedrich Ebert Str. 217a 58666 Kierspe
MC-Hx 010 Relative Feuchte und Temperatur der Luft messen und den Taupunkt nach h-x-mollier- Diagramm berechnen MB DataTec GmbH Stand: 06.2014 Kontakt: MB DataTec GmbH Friedrich Ebert Str. 217a 58666 Kierspe
Der Anschluss an einen Computer
 Firmware version: 2.1 GUI version: 2.1 Board version: siehe Abbildung Der Anschluss an einen Computer Man verbindet das Controllerboard mit dem PC mit einem USB-Kabel und natürlich den Sensor mit dem entsprechenden
Firmware version: 2.1 GUI version: 2.1 Board version: siehe Abbildung Der Anschluss an einen Computer Man verbindet das Controllerboard mit dem PC mit einem USB-Kabel und natürlich den Sensor mit dem entsprechenden
10.1 Auflösung, Drucken und Scannen
 Um einige technische Erläuterungen kommen wir auch in diesem Buch nicht herum. Für Ihre Bildergebnisse sind diese technischen Zusammenhänge sehr wichtig, nehmen Sie sich also etwas Zeit und lesen Sie dieses
Um einige technische Erläuterungen kommen wir auch in diesem Buch nicht herum. Für Ihre Bildergebnisse sind diese technischen Zusammenhänge sehr wichtig, nehmen Sie sich also etwas Zeit und lesen Sie dieses
SJ OFFICE - Update 3.0
 SJ OFFICE - Update 3.0 Das Update auf die vorherige Version 2.0 kostet netto Euro 75,00 für die erste Lizenz. Das Update für weitere Lizenzen kostet jeweils netto Euro 18,75 (25%). inkl. Programmsupport
SJ OFFICE - Update 3.0 Das Update auf die vorherige Version 2.0 kostet netto Euro 75,00 für die erste Lizenz. Das Update für weitere Lizenzen kostet jeweils netto Euro 18,75 (25%). inkl. Programmsupport
Fotos verkleinern mit Paint
 Fotos verkleinern mit Paint Warum Paint? Sicher, es gibt eine Menge kostenloser guter Programme und Möglichkeiten im Netz zum Verkleinern von Fotos. Letztendlich ist es Geschmackssache, aber meine Erfahrungen
Fotos verkleinern mit Paint Warum Paint? Sicher, es gibt eine Menge kostenloser guter Programme und Möglichkeiten im Netz zum Verkleinern von Fotos. Letztendlich ist es Geschmackssache, aber meine Erfahrungen
Ohne Fehler geht es nicht Doch wie viele Fehler sind erlaubt?
 Ohne Fehler geht es nicht Doch wie viele Fehler sind erlaubt? Behandelte Fragestellungen Was besagt eine Fehlerquote? Welche Bezugsgröße ist geeignet? Welche Fehlerquote ist gerade noch zulässig? Wie stellt
Ohne Fehler geht es nicht Doch wie viele Fehler sind erlaubt? Behandelte Fragestellungen Was besagt eine Fehlerquote? Welche Bezugsgröße ist geeignet? Welche Fehlerquote ist gerade noch zulässig? Wie stellt
Hinweise zur Kalibrierung von Kameras mit einer AICON Kalibriertafel
 Hinweise zur Kalibrierung von Kameras mit einer AICON Kalibriertafel AICON 3D Systems GmbH Celler Straße 32 D-38114 Braunschweig Telefon: +49 (0) 5 31 58 000 58 Fax: +49 (0) 5 31 58 000 60 Email: info@aicon.de
Hinweise zur Kalibrierung von Kameras mit einer AICON Kalibriertafel AICON 3D Systems GmbH Celler Straße 32 D-38114 Braunschweig Telefon: +49 (0) 5 31 58 000 58 Fax: +49 (0) 5 31 58 000 60 Email: info@aicon.de
Reinigung... 2. Normale Reingung der CheckStab Leitfähigkeitselektrode... 2. Gründliche Reinigung der Leitfähigkeitselektrode... 2
 Diese Anleitung fasst einige Punkte zusammen, die für eine gute Funktion der CheckStab Geräte wichtig sind. Sie ist nicht als Ersatz für das Handbuch, sondern als Ergänzung zum Handbuch gedacht. Bitte
Diese Anleitung fasst einige Punkte zusammen, die für eine gute Funktion der CheckStab Geräte wichtig sind. Sie ist nicht als Ersatz für das Handbuch, sondern als Ergänzung zum Handbuch gedacht. Bitte
Linienland, Flächenland und der Hyperraum Ein Ausflug durch die Dimensionen
 Linienland, Flächenland und der Hyperraum Ein Ausflug durch die Dimensionen Stephan Rosebrock Pädagogische Hochschule Karlsruhe 23. März 2013 Stephan Rosebrock (Pädagogische Hochschule Linienland, Karlsruhe)
Linienland, Flächenland und der Hyperraum Ein Ausflug durch die Dimensionen Stephan Rosebrock Pädagogische Hochschule Karlsruhe 23. März 2013 Stephan Rosebrock (Pädagogische Hochschule Linienland, Karlsruhe)
Im Original veränderbare Word-Dateien
 Computergrafik Bilder, Grafiken, Zeichnungen etc., die mithilfe von Computern hergestellt oder bearbeitet werden, bezeichnet man allgemein als Computergrafiken. Früher wurde streng zwischen Computergrafik
Computergrafik Bilder, Grafiken, Zeichnungen etc., die mithilfe von Computern hergestellt oder bearbeitet werden, bezeichnet man allgemein als Computergrafiken. Früher wurde streng zwischen Computergrafik
In 12 Schritten zum mobilen PC mit Paragon Drive Copy 11 und Microsoft Windows Virtual PC
 PARAGON Technologie GmbH, Systemprogrammierung Heinrich-von-Stephan-Str. 5c 79100 Freiburg, Germany Tel. +49 (0) 761 59018201 Fax +49 (0) 761 59018130 Internet www.paragon-software.com Email sales@paragon-software.com
PARAGON Technologie GmbH, Systemprogrammierung Heinrich-von-Stephan-Str. 5c 79100 Freiburg, Germany Tel. +49 (0) 761 59018201 Fax +49 (0) 761 59018130 Internet www.paragon-software.com Email sales@paragon-software.com
Computergruppe Heimerdingen Basiskurs. Karlheinz Wanja & Richard Zeitler
 Computergruppe Heimerdingen Basiskurs Karlheinz Wanja & Richard Zeitler Dateiverwaltung (im Haushalt) 2 Dateiverwaltung (im Computer) Speichermedien 1.) Festplatte 2.) Externe Medien Externe Festplatte
Computergruppe Heimerdingen Basiskurs Karlheinz Wanja & Richard Zeitler Dateiverwaltung (im Haushalt) 2 Dateiverwaltung (im Computer) Speichermedien 1.) Festplatte 2.) Externe Medien Externe Festplatte
Meilenstein 3 - Abschlusspräsentation
 WPF Künstliche Intelligenz logische Agenten & Roboter Fachhochschule Köln Campus GM Meilenstein 3 - Abschlusspräsentation Gruppe Blau - Straub, Wilzopolski, Kaymak 1 Agenda 1. Agent Aktuatoren Sensoren
WPF Künstliche Intelligenz logische Agenten & Roboter Fachhochschule Köln Campus GM Meilenstein 3 - Abschlusspräsentation Gruppe Blau - Straub, Wilzopolski, Kaymak 1 Agenda 1. Agent Aktuatoren Sensoren
Integration mit. Wie AristaFlow Sie in Ihrem Unternehmen unterstützen kann, zeigen wir Ihnen am nachfolgenden Beispiel einer Support-Anfrage.
 Integration mit Die Integration der AristaFlow Business Process Management Suite (BPM) mit dem Enterprise Information Management System FILERO (EIMS) bildet die optimale Basis für flexible Optimierung
Integration mit Die Integration der AristaFlow Business Process Management Suite (BPM) mit dem Enterprise Information Management System FILERO (EIMS) bildet die optimale Basis für flexible Optimierung
Erstellen einer Collage. Zuerst ein leeres Dokument erzeugen, auf dem alle anderen Bilder zusammengefügt werden sollen (über [Datei] > [Neu])
![Erstellen einer Collage. Zuerst ein leeres Dokument erzeugen, auf dem alle anderen Bilder zusammengefügt werden sollen (über [Datei] > [Neu])](/thumbs/29/13170670.jpg "Erstellen einer Collage. Zuerst ein leeres Dokument erzeugen, auf dem alle anderen Bilder zusammengefügt werden sollen (über [Datei] > [Neu])") 3.7 Erstellen einer Collage Zuerst ein leeres Dokument erzeugen, auf dem alle anderen Bilder zusammengefügt werden sollen (über [Datei] > [Neu]) Dann Größe des Dokuments festlegen beispielsweise A4 (weitere
3.7 Erstellen einer Collage Zuerst ein leeres Dokument erzeugen, auf dem alle anderen Bilder zusammengefügt werden sollen (über [Datei] > [Neu]) Dann Größe des Dokuments festlegen beispielsweise A4 (weitere
Grundlagen der Theoretischen Informatik, SoSe 2008
 1. Aufgabenblatt zur Vorlesung Grundlagen der Theoretischen Informatik, SoSe 2008 (Dr. Frank Hoffmann) Lösung von Manuel Jain und Benjamin Bortfeldt Aufgabe 2 Zustandsdiagramme (6 Punkte, wird korrigiert)
1. Aufgabenblatt zur Vorlesung Grundlagen der Theoretischen Informatik, SoSe 2008 (Dr. Frank Hoffmann) Lösung von Manuel Jain und Benjamin Bortfeldt Aufgabe 2 Zustandsdiagramme (6 Punkte, wird korrigiert)
Beim ROBORACE werden jedes Jahr Schüler und Studierende mit einer neuen Aufgabe aus dem Bereich der Technischen Kybernetik herausgefordert.
 Beim ROBORACE werden jedes Jahr Schüler und Studierende mit einer neuen Aufgabe aus dem Bereich der Technischen Kybernetik herausgefordert. Die Schüler entwickeln selbstständig vollautonome Roboter auf
Beim ROBORACE werden jedes Jahr Schüler und Studierende mit einer neuen Aufgabe aus dem Bereich der Technischen Kybernetik herausgefordert. Die Schüler entwickeln selbstständig vollautonome Roboter auf
Wichtiger Hinweis: Bitte lesen Sie diesen Hinweis vor der Installation.
 Wichtiger Hinweis: Bitte installieren Sie zuerst den Treiber und schließen erst danach Ihre VideoCAM ExpressII an den USB-Anschluss an. Bitte lesen Sie diesen Hinweis vor der Installation. 1. Software
Wichtiger Hinweis: Bitte installieren Sie zuerst den Treiber und schließen erst danach Ihre VideoCAM ExpressII an den USB-Anschluss an. Bitte lesen Sie diesen Hinweis vor der Installation. 1. Software
Übungsaufgaben. - Vorgehensweise entsprechend dem Algorithmus der schriftlichen Multiplikation
 Übungsaufgaben Anmerkung Allen Beispielen soll noch hinzugefügt sein, dass wertvolle Hinweise, also die Tipps und Tricks die der schnellen maschinellen Multiplikation zu Grunde liegen, neben dem toff zur
Übungsaufgaben Anmerkung Allen Beispielen soll noch hinzugefügt sein, dass wertvolle Hinweise, also die Tipps und Tricks die der schnellen maschinellen Multiplikation zu Grunde liegen, neben dem toff zur
Buddy - Algorithmus Handbuch für Endnutzer Stand 02.08.2005
 Buddy - Algorithmus Handbuch für Endnutzer Stand 02.08.2005 1. Vorwort 1 2. Systemvoraussetzungen 2 3. Programmarten 2 4. Sicherheit der Endnutzer 2 5. Handhabung 3 5.1 allgemeine Programmübersicht 3 5.2
Buddy - Algorithmus Handbuch für Endnutzer Stand 02.08.2005 1. Vorwort 1 2. Systemvoraussetzungen 2 3. Programmarten 2 4. Sicherheit der Endnutzer 2 5. Handhabung 3 5.1 allgemeine Programmübersicht 3 5.2
MapReduce und Datenbanken Thema 15: Strom bzw. Onlineverarbeitung mit MapReduce
 MapReduce Jan Kristof Nidzwetzki MapReduce 1 / 17 Übersicht 1 Begriffe 2 Verschiedene Arbeiten 3 Ziele 4 DEDUCE: at the intersection of MapReduce and stream processing Beispiel 5 Beyond online aggregation:
MapReduce Jan Kristof Nidzwetzki MapReduce 1 / 17 Übersicht 1 Begriffe 2 Verschiedene Arbeiten 3 Ziele 4 DEDUCE: at the intersection of MapReduce and stream processing Beispiel 5 Beyond online aggregation:
Informatik und Informationstechnik (IT)
") Informatik und Informationstechnik (IT) Abgrenzung Zusammenspiel Übersicht Informatik als akademische Disziplin Informations- und Softwaretechnik Das Berufsbild des Informatikers in der Bibliothekswelt
Informatik und Informationstechnik (IT) Abgrenzung Zusammenspiel Übersicht Informatik als akademische Disziplin Informations- und Softwaretechnik Das Berufsbild des Informatikers in der Bibliothekswelt
[Leitfaden] [Sicher kommunizieren mit der Stadt Konstanz (VPS)] Einleitung. [Stadt Konstanz] [Herausgeber: Hauptamt] [Stand: 2010]
![[Leitfaden] [Sicher kommunizieren mit der Stadt Konstanz (VPS)] Einleitung. [Stadt Konstanz] [Herausgeber: Hauptamt] [Stand: 2010]](/thumbs/38/17928137.jpg "[Leitfaden] [Sicher kommunizieren mit der Stadt Konstanz (VPS)] Einleitung. [Stadt Konstanz] [Herausgeber: Hauptamt] [Stand: 2010]") [Leitfaden] Einleitung [Sicher kommunizieren mit der Stadt Konstanz (VPS)] [Stadt Konstanz] [Herausgeber: Hauptamt] [Stand: 2010] 1 Inhalt 1 Einleitung... 2 2 Nachrichten senden (ohne Registrierung)...
[Leitfaden] Einleitung [Sicher kommunizieren mit der Stadt Konstanz (VPS)] [Stadt Konstanz] [Herausgeber: Hauptamt] [Stand: 2010] 1 Inhalt 1 Einleitung... 2 2 Nachrichten senden (ohne Registrierung)...
Messmittelfähigkeit. Andreas Masmünster, Quality Control Event, 30. Juni 2011
 Messmittelfähigkeit Andreas Masmünster, Quality Control Event, 30. Juni 2011 Agenda Messmittel Allgemeines Methode 1 Methode 2 Ziel der Methoden Praktischer Teil nach Methode 2 Formblatt Schlussfolgerung
Messmittelfähigkeit Andreas Masmünster, Quality Control Event, 30. Juni 2011 Agenda Messmittel Allgemeines Methode 1 Methode 2 Ziel der Methoden Praktischer Teil nach Methode 2 Formblatt Schlussfolgerung
Einrichten einer Festplatte mit FDISK unter Windows 95/98/98SE/Me
 Einrichten einer Festplatte mit FDISK unter Windows 95/98/98SE/Me Bevor Sie die Platte zum ersten Mal benutzen können, muss sie noch partitioniert und formatiert werden! Vorher zeigt sich die Festplatte
Einrichten einer Festplatte mit FDISK unter Windows 95/98/98SE/Me Bevor Sie die Platte zum ersten Mal benutzen können, muss sie noch partitioniert und formatiert werden! Vorher zeigt sich die Festplatte
GRS SIGNUM Product-Lifecycle-Management
 GRS SIGNUM Product-Lifecycle-Management Das optionale Modul Product-Lifecycle-Management stellt eine mächtige Ergänzung zum Modul Forschung & Entwicklung dar. Folgende Punkte werden dabei abgedeckt: Definition
GRS SIGNUM Product-Lifecycle-Management Das optionale Modul Product-Lifecycle-Management stellt eine mächtige Ergänzung zum Modul Forschung & Entwicklung dar. Folgende Punkte werden dabei abgedeckt: Definition
Einrichtung des Cisco VPN Clients (IPSEC) in Windows7
 in Windows7") Einrichtung des Cisco VPN Clients (IPSEC) in Windows7 Diese Verbindung muss einmalig eingerichtet werden und wird benötigt, um den Zugriff vom privaten Rechner oder der Workstation im Home Office über
Einrichtung des Cisco VPN Clients (IPSEC) in Windows7 Diese Verbindung muss einmalig eingerichtet werden und wird benötigt, um den Zugriff vom privaten Rechner oder der Workstation im Home Office über
teischl.com Software Design & Services e.u. office@teischl.com www.teischl.com/booknkeep www.facebook.com/booknkeep
 teischl.com Software Design & Services e.u. office@teischl.com www.teischl.com/booknkeep www.facebook.com/booknkeep 1. Erstellen Sie ein neues Rechnungsformular Mit book n keep können Sie nun Ihre eigenen
teischl.com Software Design & Services e.u. office@teischl.com www.teischl.com/booknkeep www.facebook.com/booknkeep 1. Erstellen Sie ein neues Rechnungsformular Mit book n keep können Sie nun Ihre eigenen
Kurzanleitung So geht s
 Kurzanleitung So geht s MDT IP Interface SCN IP000.01 MDT IP Router SCN IP100.01 IP Interface IP Router einrichten Es wurden keine Einträge für das Inhaltsverzeichnis gefunden.falls Sie Basis Informationen
Kurzanleitung So geht s MDT IP Interface SCN IP000.01 MDT IP Router SCN IP100.01 IP Interface IP Router einrichten Es wurden keine Einträge für das Inhaltsverzeichnis gefunden.falls Sie Basis Informationen
Handbuch zur Installation der Software für die Bürgerkarte
 Handbuch zur Installation der Software für die Bürgerkarte Microsoft Windows (7, Vista, XP) Version: 1 / Datum: 28.09.2012 www.provinz.bz.it/buergerkarte/ Inhaltsverzeichnis Haftungsausschlussklausel...
Handbuch zur Installation der Software für die Bürgerkarte Microsoft Windows (7, Vista, XP) Version: 1 / Datum: 28.09.2012 www.provinz.bz.it/buergerkarte/ Inhaltsverzeichnis Haftungsausschlussklausel...
Technische Alternative elektronische Steuerungsgerätegesellschaft mbh. A-3872 Amaliendorf, Langestr. 124 Tel +43 (0)2862 53635 mail@ta.co.
2862 53635 mail@ta.co.") Technische Alternative elektronische Steuerungsgerätegesellschaft mbh. A-3872 Amaliendorf, Langestr. 124 Tel +43 (0)2862 53635 mail@ta.co.at USB-Treiber Vers. 2.2 USB - Treiber Inhaltsverzeichnis Allgemeines...
Technische Alternative elektronische Steuerungsgerätegesellschaft mbh. A-3872 Amaliendorf, Langestr. 124 Tel +43 (0)2862 53635 mail@ta.co.at USB-Treiber Vers. 2.2 USB - Treiber Inhaltsverzeichnis Allgemeines...
Versandoptimierung VKA Versandkostenkontrolle und Abrechnung
 Übersicht Kurzbeschreibung Innerhalb des VLS VersandLogistikSystems stehen Daten auf folgenden Ebenen zur Verfügung: Packstücke Einlieferungslisten VKA-Aufträge, -Positionen, -Texte VKA-Fakturen, -Positionen,
Übersicht Kurzbeschreibung Innerhalb des VLS VersandLogistikSystems stehen Daten auf folgenden Ebenen zur Verfügung: Packstücke Einlieferungslisten VKA-Aufträge, -Positionen, -Texte VKA-Fakturen, -Positionen,
Inhaltsverzeichnis. 1. Empfängerübersicht / Empfänger hinzufügen 2. Erstellen eines neuen Newsletters / Mailings 3. Versand eines Newsletters
 Erste Schritte Wir heißen Sie herzlich willkommen im Newslettersystem der Euroweb Internet GmbH. Hier erfahren Sie die grundlegendsten Informationen, die Sie zur Erstellung und zum Versand eines Newsletters
Erste Schritte Wir heißen Sie herzlich willkommen im Newslettersystem der Euroweb Internet GmbH. Hier erfahren Sie die grundlegendsten Informationen, die Sie zur Erstellung und zum Versand eines Newsletters
PIERAU PLANUNG GESELLSCHAFT FÜR UNTERNEHMENSBERATUNG
 Übersicht Wer ist? Was macht anders? Wir denken langfristig. Wir individualisieren. Wir sind unabhängig. Wir realisieren. Wir bieten Erfahrung. Für wen arbeitet? Pierau Planung ist eine Gesellschaft für
Übersicht Wer ist? Was macht anders? Wir denken langfristig. Wir individualisieren. Wir sind unabhängig. Wir realisieren. Wir bieten Erfahrung. Für wen arbeitet? Pierau Planung ist eine Gesellschaft für
Kurzeinweisung. WinFoto Plus
 Kurzeinweisung WinFoto Plus Codex GmbH Stand 2012 Inhaltsverzeichnis Einleitung... 3 Allgemeines... 4 Vorbereitungen... 4 Drucken des Baustellenblatts im Projekt... 4 Drucken des Barcodes auf dem Arbeitsauftrag
Kurzeinweisung WinFoto Plus Codex GmbH Stand 2012 Inhaltsverzeichnis Einleitung... 3 Allgemeines... 4 Vorbereitungen... 4 Drucken des Baustellenblatts im Projekt... 4 Drucken des Barcodes auf dem Arbeitsauftrag
Xesar. Die vielfältige Sicherheitslösung
 Xesar Die vielfältige Sicherheitslösung Xesar Die professionelle Lösung für Ihr Unternehmen Xesar Sicher und flexibel Xesar ist das vielseitige elektronische Schließsystem aus dem Hause EVVA. Komplexe
Xesar Die vielfältige Sicherheitslösung Xesar Die professionelle Lösung für Ihr Unternehmen Xesar Sicher und flexibel Xesar ist das vielseitige elektronische Schließsystem aus dem Hause EVVA. Komplexe
Bearbeiten elektronische Rechnungen (Invoices)
") Bearbeiten elektronische Rechnungen (Invoices) 1. Zweck des Programms: Die elektronischen Rechnungen können zur Zeit für folgenden Bereiche genutzt werden:.. Anzeige der Rechnungen mit den relevanten Werten..
Bearbeiten elektronische Rechnungen (Invoices) 1. Zweck des Programms: Die elektronischen Rechnungen können zur Zeit für folgenden Bereiche genutzt werden:.. Anzeige der Rechnungen mit den relevanten Werten..
IGS Enkenbach-Alsenborn MINT Abend 22. Mai 2015. Multicopter, Roboter und Co.
 IGS Enkenbach-Alsenborn MINT Abend 22. Mai 2015 Multicopter, Roboter und Co. Prof. Dr.-Ing. Gerd Bitsch Hochschule Kaiserslautern (und Fraunhofer ITWM) www.hs-kl.de Inhalt Wie funktioniert ein Quadro-
IGS Enkenbach-Alsenborn MINT Abend 22. Mai 2015 Multicopter, Roboter und Co. Prof. Dr.-Ing. Gerd Bitsch Hochschule Kaiserslautern (und Fraunhofer ITWM) www.hs-kl.de Inhalt Wie funktioniert ein Quadro-
Die nachfolgende Anleitung zeigt die Vorgehensweise unter Microsoft Windows Vista.
 Schritt für Schritt Anleitung zur Einrichtung Ihrer neuen Festplatte Die nachfolgende Anleitung zeigt die Vorgehensweise unter Microsoft Windows Vista. Schließen Sie Ihre Festplatte an Ihrem Computer an.
Schritt für Schritt Anleitung zur Einrichtung Ihrer neuen Festplatte Die nachfolgende Anleitung zeigt die Vorgehensweise unter Microsoft Windows Vista. Schließen Sie Ihre Festplatte an Ihrem Computer an.
SignMax v9.1 MAX Systems Beschriftungssysteme
 Installationsanleitung SignMax v9.1 MAX Systems Beschriftungssysteme Inhaltsverzeichnis 1 DURCHZUFÜHRENDE ARBEITEN VOR DER INSTALLATION... 2 2 INSTALLATION DER ANWENDUNG... 2 3 BENUTZERRECHTE FÜR DAS VERZEICHNIS
Installationsanleitung SignMax v9.1 MAX Systems Beschriftungssysteme Inhaltsverzeichnis 1 DURCHZUFÜHRENDE ARBEITEN VOR DER INSTALLATION... 2 2 INSTALLATION DER ANWENDUNG... 2 3 BENUTZERRECHTE FÜR DAS VERZEICHNIS
secuentry/anleitung Android ConfigApp
 Beschreibung Kostenlose App zum Programmieren von Schlössern der Serie secuentry der Firma BURG-WÄCHTER. Mit der exklusiven secuentry PC-Software (Light, System, System+) administrieren Sie bequem komplette
Beschreibung Kostenlose App zum Programmieren von Schlössern der Serie secuentry der Firma BURG-WÄCHTER. Mit der exklusiven secuentry PC-Software (Light, System, System+) administrieren Sie bequem komplette
Übungsplan zu ganzen Zahlen Aufgaben zur Prüfungsvorbereitung von Markus Baur, StR Werdenfels-Gymnasium
 Übungsplan zu ganzen Zahlen Aufgaben zur Prüfungsvorbereitung von Markus Baur, StR Werdenfels-Gymnasium Das Dokument steht unter einer Creative Commons Lizens: Das Werk darf unter den folgenden Bedingungen
Übungsplan zu ganzen Zahlen Aufgaben zur Prüfungsvorbereitung von Markus Baur, StR Werdenfels-Gymnasium Das Dokument steht unter einer Creative Commons Lizens: Das Werk darf unter den folgenden Bedingungen
Softwaretechnologie -Wintersemester 2013/2014 - Dr. Günter Kniesel
 Übungen zur Vorlesung Softwaretechnologie -Wintersemester 2013/2014 - Dr. Günter Kniesel Übungsblatt 3 - Lösungshilfe Aufgabe 1. Klassendiagramme (9 Punkte) Sie haben den Auftrag, eine Online-Videothek
Übungen zur Vorlesung Softwaretechnologie -Wintersemester 2013/2014 - Dr. Günter Kniesel Übungsblatt 3 - Lösungshilfe Aufgabe 1. Klassendiagramme (9 Punkte) Sie haben den Auftrag, eine Online-Videothek
NuVinci Harmony Software und Firmware. Anleitung in deutscher Sprache
 NuVinci Harmony Software und Firmware Anleitung in deutscher Sprache NuVinci Desktop ( Harmony Programmierung ) Software Für Hersteller und Händler Download über eine abgesicherte Internetverbindung http://harmony.fallbrooktech.net/
NuVinci Harmony Software und Firmware Anleitung in deutscher Sprache NuVinci Desktop ( Harmony Programmierung ) Software Für Hersteller und Händler Download über eine abgesicherte Internetverbindung http://harmony.fallbrooktech.net/
Kapitel 1: Einführung. Was ist Informatik? Begriff und Grundprobleme der Informatik. Abschnitt 1.1 in Küchlin/Weber: Einführung in die Informatik
 Was ist Informatik? Begriff und Grundprobleme der Informatik Abschnitt 1.1 in Küchlin/Weber: Einführung in die Informatik Was ist Informatik? Informatik = computer science? Nach R. Manthey, Vorlesung Informatik
Was ist Informatik? Begriff und Grundprobleme der Informatik Abschnitt 1.1 in Küchlin/Weber: Einführung in die Informatik Was ist Informatik? Informatik = computer science? Nach R. Manthey, Vorlesung Informatik
GloboFleet. Bedienungsanleitung. GloboFleet Downloadkey EAN / GTIN 4260179020070
 GloboFleet GloboFleet Downloadkey Bedienungsanleitung EAN / GTIN 4260179020070 Inhalt Inhalt / Übersicht... 2 Tachographendaten auslesen... 3 Tachographendaten und Fahrerkarte auslesen... 4 Daten auf den
GloboFleet GloboFleet Downloadkey Bedienungsanleitung EAN / GTIN 4260179020070 Inhalt Inhalt / Übersicht... 2 Tachographendaten auslesen... 3 Tachographendaten und Fahrerkarte auslesen... 4 Daten auf den
EMIS - Langzeitmessung
 EMIS - Langzeitmessung Every Meter Is Smart (Jeder Zähler ist intelligent) Inhaltsverzeichnis Allgemeines 2 Bedienung 3 Anfangstand eingeben 4 Endstand eingeben 6 Berechnungen 7 Einstellungen 9 Tarife
EMIS - Langzeitmessung Every Meter Is Smart (Jeder Zähler ist intelligent) Inhaltsverzeichnis Allgemeines 2 Bedienung 3 Anfangstand eingeben 4 Endstand eingeben 6 Berechnungen 7 Einstellungen 9 Tarife
Fragebogen Auswahl Schrittmotor-System
 Fragebogen Auswahl Schrittmotor-System Inhaltsverzeichnis 1 Einleitung... 3 2 Anwendung / Anordnung / Konfiguration... 3 3 Abmessungen... 4 4 Umgebung... 4 4.1 Temperatur... 4 5 Mechanische Last... 4 5.1
Fragebogen Auswahl Schrittmotor-System Inhaltsverzeichnis 1 Einleitung... 3 2 Anwendung / Anordnung / Konfiguration... 3 3 Abmessungen... 4 4 Umgebung... 4 4.1 Temperatur... 4 5 Mechanische Last... 4 5.1
Bildcollage mittels Ebenen: Die Wunderblume
 Kapitel 2: Bildcollage mittels Ebenen: Die Wunderblume Um interessante Manipulationen zu machen kann man auch die Größe und den Anteil der einkopierten Teile verändern. Hier nun entsteht die phantastische
Kapitel 2: Bildcollage mittels Ebenen: Die Wunderblume Um interessante Manipulationen zu machen kann man auch die Größe und den Anteil der einkopierten Teile verändern. Hier nun entsteht die phantastische
Handbuch zur Tarifkalkulation. (Stand: August 2015)
") Handbuch zur Tarifkalkulation (Stand: August 2015) 1 Inhaltsverzeichnis Einleitung Seite 3 Technische Anforderungen. 4 Grundsätzliches zur Bedienung. 5 Start der Anwendung. 6 Tarif kalkulieren 10 2 Einleitung
Handbuch zur Tarifkalkulation (Stand: August 2015) 1 Inhaltsverzeichnis Einleitung Seite 3 Technische Anforderungen. 4 Grundsätzliches zur Bedienung. 5 Start der Anwendung. 6 Tarif kalkulieren 10 2 Einleitung
Transparente Hausverwaltung Marketingschmäh oder doch: eine neue Dimension der Dienstleistung?
 Transparente Hausverwaltung Marketingschmäh oder doch: eine neue Dimension der Dienstleistung? INTERNET Geschäftsführer Biletti Immobilien GmbH 24/7 WEB Server Frankgasse 2, 1090 Wien E-mail: udo.weinberger@weinberger-biletti.at
Transparente Hausverwaltung Marketingschmäh oder doch: eine neue Dimension der Dienstleistung? INTERNET Geschäftsführer Biletti Immobilien GmbH 24/7 WEB Server Frankgasse 2, 1090 Wien E-mail: udo.weinberger@weinberger-biletti.at
Registrierung am Elterninformationssysytem: ClaXss Infoline
 elektronisches ElternInformationsSystem (EIS) Klicken Sie auf das Logo oder geben Sie in Ihrem Browser folgende Adresse ein: https://kommunalersprien.schule-eltern.info/infoline/claxss Diese Anleitung
elektronisches ElternInformationsSystem (EIS) Klicken Sie auf das Logo oder geben Sie in Ihrem Browser folgende Adresse ein: https://kommunalersprien.schule-eltern.info/infoline/claxss Diese Anleitung
Datenlogger zur Routinekontrolle. Reinigungs- und Desinfektionsgeräte (RDG) / Reinigungs- und Desinfektionsgeräte. ZSVA Hygienekontrolle
 / Reinigungs- und Desinfektionsgeräte. ZSVA Hygienekontrolle") Datenlogger zur Routinekontrolle Reinigungs- und Desinfektionsgeräte (RDG) / Reinigungs- und Desinfektionsgeräte für Endoskope (RDG-E) / Dampfsterilisatoren / Steckbeckenspüler ZSVA Hygienekontrolle Elektronisches
Datenlogger zur Routinekontrolle Reinigungs- und Desinfektionsgeräte (RDG) / Reinigungs- und Desinfektionsgeräte für Endoskope (RDG-E) / Dampfsterilisatoren / Steckbeckenspüler ZSVA Hygienekontrolle Elektronisches
Einbinden der Somfy. Außenkamera M3113-VE
 1 Einbinden der Somfy. Außenkamera M3113-VE Artikelnummer 1875 089 Stand: März 2015 Übersicht 2 Einbindung von Kameras: Werfen Sie jederzeit einen Blick auf Ihr Haus und nehmen Sie Bilder z.b. beim Auslösen
1 Einbinden der Somfy. Außenkamera M3113-VE Artikelnummer 1875 089 Stand: März 2015 Übersicht 2 Einbindung von Kameras: Werfen Sie jederzeit einen Blick auf Ihr Haus und nehmen Sie Bilder z.b. beim Auslösen
RACE. Gut, wenn man eine Alternative hat. Managed Solutions by TCC. Gut, wenn man eine Alternative hat
 teq SUN RACE Managed Solutions by TCC Gut, wenn man eine Alternative hat teq sunrace Managed Solutions by TCC Managed Solutions sind die optimalen Lösungen für Ihre zeitgemäße ITK-Strategie. Mit komfortablen
teq SUN RACE Managed Solutions by TCC Gut, wenn man eine Alternative hat teq sunrace Managed Solutions by TCC Managed Solutions sind die optimalen Lösungen für Ihre zeitgemäße ITK-Strategie. Mit komfortablen
Buchen eines Webinars
 Buchen eines Webinars Anleitung zur Teilnahme an einem Webinar Sie wurden zu einem Webinar eingeladen und möchten nun wissen, wie Sie Zugang zu dem Webinar erhalten? Wir werden Ihnen dazu Step-by-step
Buchen eines Webinars Anleitung zur Teilnahme an einem Webinar Sie wurden zu einem Webinar eingeladen und möchten nun wissen, wie Sie Zugang zu dem Webinar erhalten? Wir werden Ihnen dazu Step-by-step
Wie beschneide ich ein Bild passend für den Ausdruck auf Papier eines bestimmten Formats?
 Einstellen der Bildgröße und Drucken Frage Wie beschneide ich ein Bild passend für den Ausdruck auf Papier eines bestimmten Formats? Antwort In diesem Beispiel wird erklärt, wie ein Bild passend für den
Einstellen der Bildgröße und Drucken Frage Wie beschneide ich ein Bild passend für den Ausdruck auf Papier eines bestimmten Formats? Antwort In diesem Beispiel wird erklärt, wie ein Bild passend für den
Daten verarbeiten. Binärzahlen
 Daten verarbeiten Binärzahlen In Digitalrechnern werden (fast) ausschließlich nur Binärzahlen eingesetzt. Das Binärzahlensystem ist das Stellenwertsystem mit der geringsten Anzahl von Ziffern. Es kennt
Daten verarbeiten Binärzahlen In Digitalrechnern werden (fast) ausschließlich nur Binärzahlen eingesetzt. Das Binärzahlensystem ist das Stellenwertsystem mit der geringsten Anzahl von Ziffern. Es kennt
Der inobroker Kfz-Versicherungsvergleich. ino24 ist eine Beteiligung der Hubert Burda Media
 Der inobroker Kfz-Versicherungsvergleich ino24 ist eine Beteiligung der Hubert Burda Media Einfache Technik ino24 erstellt Techniken für Endkunden und stellt diese Versicherungsvermittlern zur Verfügung.
Der inobroker Kfz-Versicherungsvergleich ino24 ist eine Beteiligung der Hubert Burda Media Einfache Technik ino24 erstellt Techniken für Endkunden und stellt diese Versicherungsvermittlern zur Verfügung.
GDPdU Export. Modulbeschreibung. GDPdU Export. Software-Lösungen. Stand: 21.02.2012. Seite 1
 Seite 1 Inhalt... 3 Allgemeines... 3 Vorteile... 3 Handhabung... 3 Seite 2 Allgemeines Mit der so genannten GDPdU-Schnittstelle (GDPdU steht für Grundsätze zum Datenzugriff und zur Prüfbarkeit digitaler
Seite 1 Inhalt... 3 Allgemeines... 3 Vorteile... 3 Handhabung... 3 Seite 2 Allgemeines Mit der so genannten GDPdU-Schnittstelle (GDPdU steht für Grundsätze zum Datenzugriff und zur Prüfbarkeit digitaler
Ein POP3-Account ist eine Art elektronischer Briefkasten. Bitte beachten Sie, daß keine Umlaute (ä,ö,ü,ß) eingegeben werden dürfen.
 eingegeben werden dürfen.") Ein POP3-Account ist eine Art elektronischer Briefkasten. Bitte beachten Sie, daß keine Umlaute (ä,ö,ü,ß) eingegeben werden dürfen. Die E-Mail-Adresse wird gebildet aus einem Namen (üblicherweise ein Nachname
Ein POP3-Account ist eine Art elektronischer Briefkasten. Bitte beachten Sie, daß keine Umlaute (ä,ö,ü,ß) eingegeben werden dürfen. Die E-Mail-Adresse wird gebildet aus einem Namen (üblicherweise ein Nachname