*EP A2* EP A2 (19) (11) EP A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: Patentblatt 2002/43
|
|
|
- Christin Knopp
- vor 8 Jahren
- Abrufe
Transkript
1 (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP A2* (11) EP A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: Patentblatt 02/43 (1) Int Cl. 7 : G01B 11/00, G01B 11/24 (21) Anmeldenummer: (22) Anmeldetag: (84) Benannte Vertragsstaaten: AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE TR Benannte Erstreckungsstaaten: AL LT LV MK RO SI () Priorität: DE (71) Anmelder: VMT Bildverarbeitungssysteme GmbH Weinheim (DE) TECMEDIC GmbH 4897 Gelsenkirchen (DE) (72) Erfinder: Grünewald,Dirk,Dipl.-Ing Biebesheim (DE) (74) Vertreter: Mierswa, Klaus, Dipl.-Ing. Friedrichstrasse Mannheim (DE) (4) Verfahren zur Arbeitspunktstabilisierung bei berührungsloser 3D-Positionserkennung eines Objektes mittels Digitalkameras (7) Die Erfindung betrifft ein Verfahren zur Arbeitspunktstabilisierung bei berührungsloser 3D- Positionserkennung eines zu vermessenden Objektes mittels wenigstens drei Digitalkameras (1) innerhalb eines digitalen Bildverarbeitungssystems, zur Bestimmung der Position des Objektes, unter Kalibrierung der Kameras auf ein gemeinsames Weltkoordinatensystem, WKS, und anschließender Verbringung des Objektes in den Raum zwischen den Kameras. Die das System beschreibenden Kameraparameter einer der Kameras oder Objektmerkmale des zu vermessenenden Objektes sind fehlerhaft vermessen, womit die digitalen Kameras im WKS eine falsche Weltposition aufweisen. Unter Heranziehung der Transformationsvorschriften zur Transformation eines dreidimensionalen Punktes ( p w ) gegebener Koordinaten in eine zweidimensionale Rechnerkoordinate (X r /Y r ) des digitalisierten Bildes erfolgt die Positionsbestimmung mittels eines Bündelausgleichs, womit eine Objektposition bestimmt wird, bei der die Summe der Abstände von den 2D-Bilddaten [ (g j int)] der i-ten Merkmale in den j-ten Kameras zu den durch die Transformationen und den Objektparametern, nämlich Merkmalsvektoren im Objektkoordinatensystem ( o p i ), theoretisch gegebenen 2D-Projektionen minimiert wird. EP A2 Printed by Jouve, 7001 PARIS (FR)
 Anmelder: VMT Bildverarbeitungssysteme GmbH 69469 Weinheim (DE) TECMEDIC GmbH 4897 Gelsenkirchen (DE) (72) Erfinder: Grünewald,Dirk,Dipl.-Ing.")
2 Beschreibung Technisches Gebiet: [0001] Die Erfindung betrifft ein Verfahren zur Arbeitspunktstabilisierung bei berührungsloser 3D- Positionserkennung eines zu vermessenden Objektes mittels wenigstens drei Digitalkameras mit gegebener Brennweite innerhalb eines digitalen Bildverarbeitungssystems, zur Bestimmung der Position des Objektes bzw. der Position von Merkmalen desselben, unter Kalibrierung der Kameras auf ein gemeinsames Weltkoordinatensystem, WKS, und anschließender Verbringung des Objektes in den Raum zwischen den Kameras, wobei die das System beschreibenden Komponenten, nämlich Kameraparameter einer der Kameras oder Objektmerkmale des zu vermessenenden Objektes, fehlerhaft vermessen sind und damit die digitalen Kameras im WKS eine falsche Weltposition aufweisen, gemäß dem Oberbegriff des Anspruchs 1. Stand der Technik: [0002] In der automatisierten Fertigung von z.b. Fahrzeugkarossen ist die digitale Bildverarbeitung heute Stand der Technik. Eine der Anwendungen in diesem Prozess ist die Positionserkennung des Werkstückes, wobei kalibrierte Kameras auf das zu bearbeitende Objekt sehen. Aus den sich ergebenden Pixeldaten bestimmter Objektmerkmale wird hiernach die 3-D-Werkstückpose in einem definierten Koordinatensystem berechnet. Der fortschreitende Einzug der Automatisierungstechnik in die industrielle Fertigung von Automobilkarossen führt zu immer komplexeren Aufgabenstellungen für die Robotik. So stellt beispielsweise das Abdichten von Fugen oder Nähten, das Sealing, an Karossen oder Werkstücken durch Industrieroboter ein anspruchsvolles Teilproblem dar. Dazu müssen die Kameras kalibriert sein. [0003] Zur Kalibrierung der Kameras stehen zwei Methoden zur Verfügung, nämlich durch Bestimmung vorab aus den Bilddaten mittels eines Kalibrierkörpers oder einer Kalibriertafeltafel, wobei ein derartiges Verfahren durch die EP A1 bekannt geworden ist, um Manipulationen an einem Werkstück durchzuführen, mit mehreren mit diesem zusammenwirkenden räumlich getrennten elektronischen Kameras mit Bildverarbeitung. Jede der mindestens drei räumlich getrennten Kameras nimmt bei deren Einmessung eine ihr zugeordnete Kalibriertafel mit Punktmuster auf, deren Bilder sowie das Punktmuster zur Bestimmung der Lage der einzelnen Kamera im Raum verarbeitet und deren Lage gespeichert werden. [0004] Eine Vermessung der Kalibriertafeln zueinander erfolgt hiervon getrennt, wobei diese Werte ebenfalls gespeichert werden. Anschließend wird der zu vermessende Körper in den Raum zwischen den Kameras verbracht. Je ein charakteristischer Punkt auf dem in den Raum verbrachten Körper wird in je einer diesem zugeordneten Kamera abgebildet, so dass dessen Lage im Bild mit seiner konstruktiven vorgegebenen Position des charakteristischen Punktes auf den in den Raum verbrachten Körper zusammen mit den gespeicherten Werten verarbeitet wird; alle derart verarbeiteten Werte charakterisieren die Lage des in den Raum verbrachten Körpers in den sechs räumlichen Freiheitsgraden. Nachteilig an diesem Verfahren ist prinzipiell, dass zum Bestimmen der Lage eines Körpers im Raum Kalibriertafeln verwendet werden, welche sorgfältig gehandhabt werden müssen und nicht beschädigt werden dürfen und, dass die Kalibriertafeln aufwendig mechanisch im Sichtfeld der Kameras positioniert werden müssen und die Positionierbarkeit äußerst wiederholgenau sein muß. [000] Durch die DE ist ein Verfahren zur Gewinnung der Kamerapositionen mittels Antastung durch ein externes Messgestell vorgeschlagen worden unter Verwendung von mindestens zwei elektronischen Kameras und digitaler Bildverarbeitung, bei welchem die Kameras auf ein gemeinsames Weltkoordinatensystem kalibriert werden und anschließend das Werkstück in den Raum zwischen den Kameras verbracht wird. Zur Erstellung des gemeinsames Weltkoordinatensystems werden die Kameras einzeln als Lochkameramodelle behandelt, wobei eine direkte Vermessung der Position und der Orientierung der Lichteintrittsöffnung einer jeden Kamera erfolgt, indem die Position und die Orientierung der Lichteintrittsöffnung einer jeden Kamera in ihrem passiven Zustand mit einem separaten Meßsystem vermessen wird, welches zur direkten Antastung der Lichteintrittsöffnung imstande ist und welches die Position und die Orientierung der Lichteintrittsöffnung im Weltkoordinatensystem liefert. Das in den Raum zwischen den Kameras verbrachte Werkstück wird durch die nunmehr aktiven Kameras optisch abgebildet, die Videobilder werden mit einem Rechner zum Auffinden von Merkmalen des Werkstücks ausgewertet. Aus der Kenntnis der Position der Kameras bezüglich des Weltkoordinatensystems, der Videobilder und der Koordinaten der Merkmale des Werkstücks in einem Koordinatensystem des Werkstücks werden durch einen Rechner nach der Methode des Bündelausgleichs die Position des Werkstücks in Weltkoordinaten sowie die Position der Merkmale des Werkstücks in Weltkoordinaten errechnet. [0006] Eine zentrale Frage bei der Positionserkennung eines Werkstücks mittels digitaler Bildverarbeitung mit Digitalkameras ist hierbei, welche Einflüsse die "System beschreibenden Komponenten", wie z.b. die Kameraparameter oder die Objektmerkmale, auf die Positionsbestimmung haben. [0007] Ungenauigkeiten dieser Parameter, beispielsweise bei der Kameraposition, wirken sich zum Einen auf die 2

3 absolute Positionserkennung aus, zum Anderen rufen sie Verspannungen gleich denen eines mechanischen Systems hervor, durch welche das Messergebnis beim Ausfall einer der Kameras von mehreren mehr oder weniger stark vom tatsächlichen Arbeitspunkt abweichen kann. [0008] Es wird dabei davon ausgegangen, dass die Position eines Werkstücks bzw. eines Werkstückpunktes beim Einmessen erkannt worden ist, allerdings wurde die Position falsch eingemessen bzw. beim Einmessen ergaben sich Fehler, so dass die Position falsch ist. Der Arbeitspunkt, d.i. die erste Position, wird dabei durch ein unabhängiges Meßsystem, wie Theodolit, im Welt-Koordinatensystem, abgekürzt WKS, ermittelt. Aufgrund dieses Fehlers kommt das 3D-System der digitalen Kameras zu einem anderen Ergebnis als die Ermittlung mittels Theodolit im WKS ergeben hat, so daß die digitalen Kameras im WKS eine falsche Weltposition aufweisen und fehlerhaft positioniert werden könnten. Technische Aufgabe: [0009] Der Erfindung liegt die Aufgabe zugrunde, ein Verfahren zur Stabilisierung des Arbeitspunktes bei berührungsloser 3D- Positionserkennung eines zu vermessenden Objektes mittels wenigstens drei Digitalkameras gemäß der genannten Gattung zu schaffen, bei welchem bei einer Verschiebung einer oder mehrerer der Kameras oder bei einer Verschiebung des zu vermessenden Objekts die dadurch entstehenden Ungenauigkeiten bzw. Fehler trotzdem verarbeitet und ausgeglichen werden können. Offenbarung der Erfindung und deren Vorteile: [00] Die Lösung der Aufgabe besteht darin, dass unter Heranziehung der Transformationsvorschriften zur Transformation eines dreidimensionalen Punktes p w gegebener Koordinaten in eine zweidimensionale Rechnerkoordinate X r /Y r des digitalisierten Bildes die Positionsbestimmung mittels eines Bündelausgleichs erfolgt und damit eine Objektposition bestimmt wird, bei der die Summe der Abstände von den 2D-Bilddaten [ (g j int)] der i-ten Merkmale in den j- ten Kameras zu den durch die Transformationen und den Objektparametern, nämlich Merkmalsvektoren im Objektkoordinatensystem o i, theoretisch gegebenen 2D-Projektionen [q j p (w o T o p i,gj ext)], minimiert wird. i [0011] In einer vorteilhaften Ausgestaltung des erfindungsgemäßen Verfahrens wird das Weltkoordinatensystem bezüglich geeigneter Startwerte in der Nähe des Objektkoordinatensystems definiert und damit werden die Startwerte für die gesuchte Objektposition zu Null gewählt. [0012] In weiterer Ausgestaltung des erfindungsgemäßen Verfahrens wird bei einer Arbeitspunktstabilisierung durch Variation der Kameraposition durch einen Bündelausgleich diejenige Objektposition des Objekts bzw. Position von Merkmalen des Objekts bestimmt, welche für alle Kameras den Abstand zwischen den realen Abbildungsdaten und den durch die externen Kalibrierungsdaten bestimmten Solldaten minimiert, so dass die Kameraposition im Raum so Soll bestimmt wird, dass die Fehler auf dem Chip der Digitalkameras eliminiert und somit die Matrix T bestimmt wird, welche den Sollvektor k soll auf den Istvektor k Ist p p ist abbildet und zur Deckung bringt. [0013] Hierzu kann in vorteilhafter Weise aus dem Sollvektor k p soll und dem Istvektor k p ist die Drehachse v dreh ermittelt und daraus eine Quarterniondarstellung gewonnen werden und aus den Quarternionen eine Rotationsmatrix berechnet werden, welche zur Korrektur mit der die die Kameraposition beschreibenden Matrix multipliziert wird. [0014] Das erfindungsgemäße Verfahren besitzt den Vorteil, daß mit demselben bei berührungsloser 3D-Positionserkennung eines zu vermessenden Objektes mittels wenigstens drei Digitalkameras bei einer Verschiebung einer oder mehrerer der Kameras oder bei einer Verschiebung des zu vermessenden Objekts die dadurch entstehenden Ungenauigkeiten bzw. Fehler trotzdem verarbeitet und ausgeglichen werden können. Unter der Voraussetzung einer redundanten Anzahl von Kameras besteht der Vorteil des Verfahrens darin, dass, wenn ein Merkmal auf dem zu vermessenden Objektes nicht erkannt wird - oder ein Merkmal "verbeult" wird - oder wenn eine von wenigstens drei Kameras ausfällt, die verbleibenden Kameras trotzdem zu einem gleichbleibenden bzw. ausgeglichenem Ergebnis kommen. Ungenauigkeiten werden somit in richtiger Weise verarbeitet bzw. ausgeglichen. Die Kameras werden somit in erfindungsgemäßer Weise rechnerisch verschoben, so dass der Fehleranteil einer jeden Kamera auf das Gesamtergebnis bezogen gleich groß ist. Aufgrund des erfindungsgemäßen Algorithmus kann mit Hilfe der zweidimensionalen 2D-Bilddaten von bekannten Merkmalen des Objektes auf die dreidimensionale 3D-Werkstückpose in Relation zu einem fest definierten Raum- oder Weltkoordinatensystem WKS geschlossen werden. [001] Somit wird nach dem erfindungsgemäßen Verfahren die Kameraposition nach der folgenden Gleichung korrigiert: Welt WeltAlt KameraT = KameraT Tkorr [0016] Erfindungsgemäß sind zwei Varianten des Verfahrens möglich, nämlich zum Einen eine Arbeitspunktstabili- 3

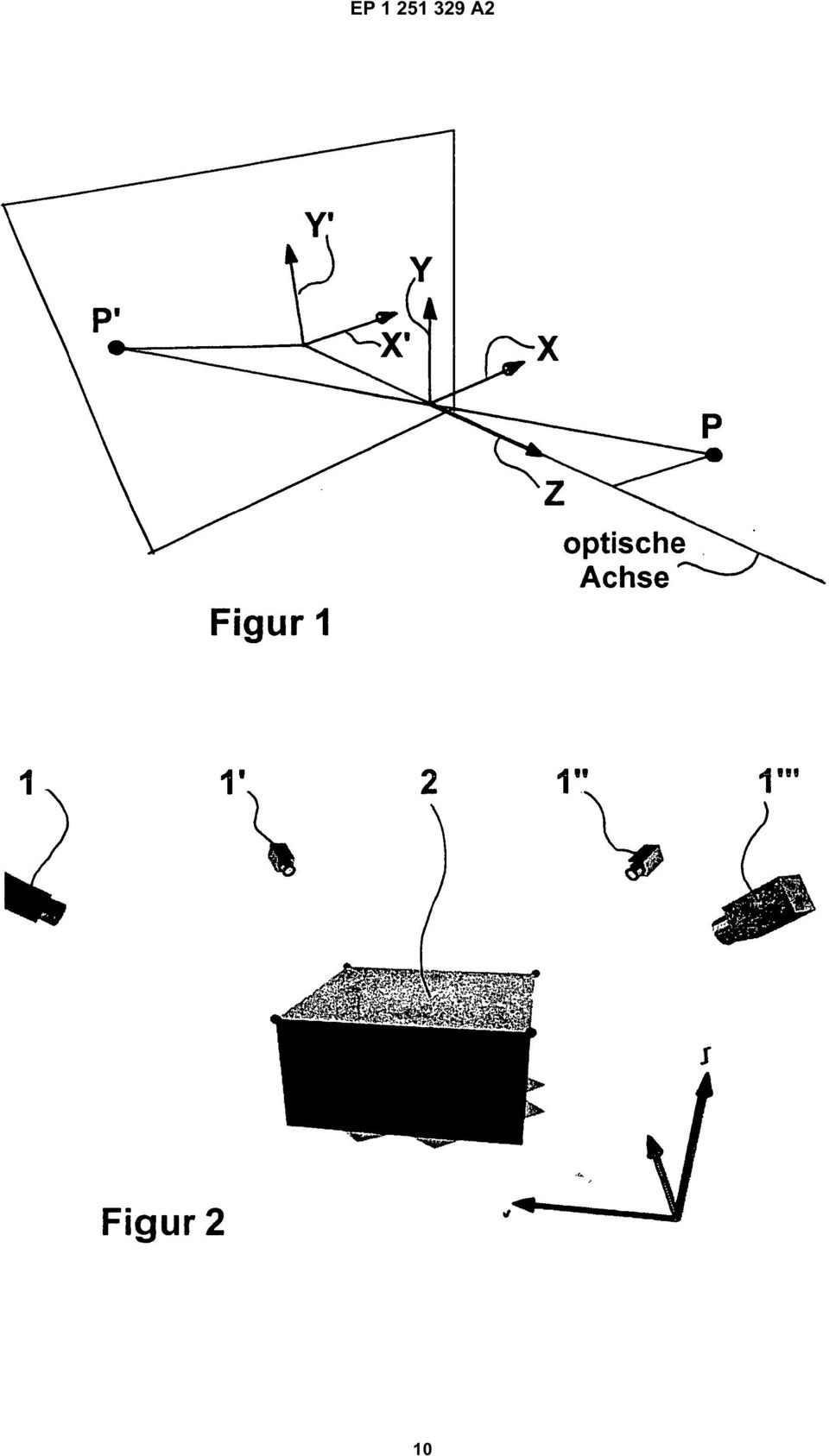
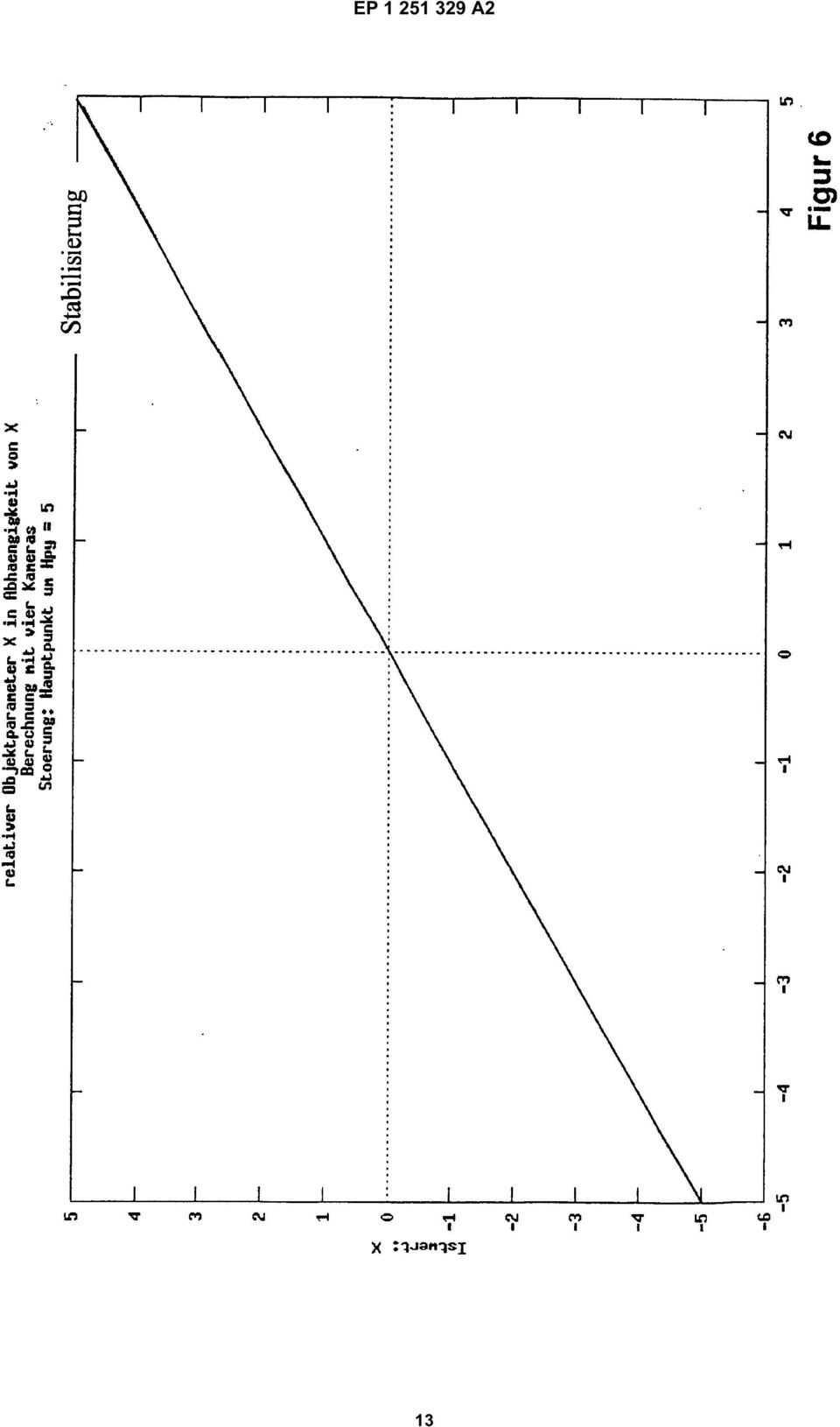
4 sierung durch Variation der Kameraposition, wobei bei dieser Variation der Objektmerkmale zur Arbeitspunktstabilisierung die physikalischen Objektparameterparameter von den Sollmerkmalen, das ist vom theoretischen, durch die Transformationen bestimmten Abbildungsvektor, Sollvektor k p soll, auf die sich ergebenden Istmerkmale, das ist der sich tatsächlich einstellende Istvektor k p ist, verschoben werden, wobei zur Erzielung einer Eindeutigkeit die Sollmerkmale [Sollvektor k p soll ] auf dem kürzesten Weg zu den Istmerkmalen [Istvektor k p ist ] verschoben werden. [0017] Zum Anderen ist eine Arbeitspunktstabilisierung durch Variation der Objektmerkmale möglich, so dass sich im Objektkoordinatensystem ein korrigierter Punkt nach folgender Gleichung ergibt: o pkorr = ( T abs ) -1 Kamera Welt T kp korr [0018] Kurzbeschreibung der Zeichnung, in der zeigen: Figur 1 ein Lochkameramodell Figur 2 eine Darstellung zur Positionserkennung starrer Körper 2 Figur 3 eine Darstellung einer Fehlerrepräsentation durch einen Absolutvektor Figur 4 eine Darstellung der Abbildungsstrahlen auf dem CCD-Chip 3 Figur eine Darstellung der Abbildung von Merkmalen Figur 6 eine graphische Wiedergabe von relativen Objektparametern X in Abhängigkeit von X mit vier Kameras 1 als Ergebnis der Arbeitspunktstabilisierung und Figur 7 eine graphische Wiedergabe von relativen Objektparametern X in Abhängigkeit von X mit drei Kameras 1 als Ergebnis der Arbeitspunktstabilisierung. [0019] Zur Erläuterung der Erfindung wird auf das in der Bildverarbeitung am Häufigsten verwendete Kameramodell der Lochkamera, Figur 1, zurückgegriffen, welche ein Lochkameramodell illustriert, nämlich die perspektivische Abbildung eines dreidimensionalen Raumpunktes P in ein unverzeichnetes, zweidimensionales Pixel P' auf der Chipebene des CCD-Chips der digitalen Kamera. Die hier zu erläuternden internen Kameraparameter reduzieren das reale Kameramodell auf das idealisierte Modell einer Lochkamera. [00] Die Lochkamera weist die internen und externen Parameter, gekennzeichnet durch "...", nämlich interne Parameter "radiale Linsenverzeichnung κ erster Ordnung", sowie die "Skalierungsfaktoren S x,s y " und eine "Chiphauptpunktverschiebung C x,c y " auf; des Weiteren zählt die "Brennweite f" mit zu den internen Größen einer Kamera. Die externen Parameter "Rot" und "T" beschreiben die Kameralage relativ zu einem fixen Koordinatensystem, beispielsweise zu einem definierten Weltkoordinatensystem, abgekürzt WKS. [0021] In seiner Gesamtheit stellt das Kameramodell die Abbildungsvorschrift eines dreidimensionalen Punktes p w in eine zweidimensionale Rechnerkoordinate X r /Y r des digitalisierten Bildes dar. Die Abbildungsvorschrift kann in vier Schritte unterteilt werden: 1.1 Transformation eines Punktes p w vom Weltkoordinatensystem in einen Punkt p c im Kamerakoordinatensystem (externe Parameter): p c = ( x c,y c,z c ) T = Rot ( x w,y w,z w ) T + T 4 wobei Rot die Rotationsmatrix und T der Translationsvektor ist. 1.2 Perspektivische Projektion (Strahlensatz) des Punktes p c in ein unverzeichnetes Pixel X/ Y, interner Parameter Brennweite f: 0 X = f x c /z c und Y = f y c /z c 1.3 Verzeichnung in ein radial verzerrtes Pixel X v /Y v, interner Parameter Linsenverzeichnung κ: X v =2X/(1 + (1-4kR 2 )) und Y v = 2Y/(1 + (1-4kR 2 )) mit R 2 = X 2 + Y 2 bzw. 4
![verschoben werden, wobei zur Erzielung einer Eindeutigkeit die Sollmerkmale [Sollvektor k p soll ] auf dem kürzesten Weg zu den Istmerkmalen [Istvektor k p ist ] verschoben werden.](/docs-images/56/9337987/images/page_4.jpg "[0017] Zum Anderen ist eine Arbeitspunktstabilisierung durch Variation der Objektmerkmale möglich, so dass sich im Objektkoordinatensystem ein korrigierter Punkt nach folgender Gleichung ergibt: o")
5 X = X v /(1 + kr v 2 ) und Y = Yv /(1 + kr v 2 ) mit R v 2 =X v 2 +Y v Berechnung der Rechnerkoordinaten X r /Y r, 4 interne Parameter: Skalierungsfaktoren S x /S y und Chiphauptpunktverschiebung C x /C y : X r = X v /S x + C x und Y r = Y v /S y + C y 1 [0022] Mittels Kalibrierung werden alle ex- und internen Parameter der Kamera bzw. der Kameras ermittelt, so dass eine Rechnerkoordinate durch umgedrehte Vorgehensweise in ein ideales Pixel X/Y zurück gerechnet werden kann. [0023] Hinsichtlich der Positionserkennung illustriert Figur 2 beispielhaft die Lageerkennung eines quaderförmigen Werkstückes mit Hilfe von vier digitalen Kameras, nämlich Positionserkennung starrer Körper. Ziel ist es, mit Hilfe der zweidimensionalen 2D- Bilddaten von bekannten Merkmalen des Objektes auf die dreidimensionale 3D- Werkstückpose in Relation zu einem fest definierten Raum- oder Weltkoordinatensystem zu schließen. [0024] Zur Positionsbestimmung wird der Bündelausgleich herangezogen: wobei bedeuten: K=Anzahl der Kameras, N=Anzahl der Merkmale. [002] Ausgehend von geeigneten Startwerten wird eine Objektposition gefunden, bei der die Summe der Abstände von den 2D-Bilddaten (g j int) der i-ten Merkmale in den j-ten Kameras zu den durch die Transformationen, g j ext und w gesuchte Objektposition T, und den Objektparametern, also den Merkmalsvektoren im Objektkoordinatensystem o i, theoretisch gegebenen o 2D-Projektionen q j p (w o T o p i,gj ext), minimiert wird. Hierbei stellen g j int die internen und g j ext die i externen Parameter der Kamera dar. [0026] Wird das Weltkoordinatensystem bezüglich geeigneter Startwerte in der Nähe des Objektkoordinatensystems definiert, können die Startwerte für die gesuchte Objektposition zu Null gewählt werden. [0027] Definiert das Objekt bezüglich Nullmessung beim Einrichten des Systems das Weltkoordinatensystem, d.h. die Koordinatensysteme liegen aufeinander, so ist die berechnete Objektposition, der sogenannte Absolutvektor, nur virtuell vorhanden und repräsentiert die Fehler des gesamten Messsystems im Arbeitspunkt nahe am Weltkoordinatensystem. Folglich ist es erforderlich, den Absolutvektor in die Positionsberechnung mit einzubeziehen. In Figur 3 ist die Fehlerrepräsentation durch den Absolutvektor gezeigt. [0028] Betreffend die Arbeitspunktstabilisierung weisen reale optische Messsysteme Fehler auf, die zu instabilen Ergebnissen führen. Hierdurch neigt das Messergebnis je nach Größe der Fehler dazu, vom Arbeitspunkt abzuweichen. Dieses ist insbesondere dann der Fall, wenn eine Kamera des Gesamtsystems ausfällt. [0029] Zwei nachfolgend beschriebene Verfahren bewirken eine Arbeitspunktstabilisierung. Dabei können entweder die Kamerapositionen oder die Merkmalskoordinaten als nicht konstante Größen dienen. Bei der ersten Variante kann auch von einem Nachkalibrieren der Kameras am Objektmodell gesprochen werden. I. Arbeitspunktstabilisierung durch Variation der Kameraposition: [00] Der Ansatz für diese Methode kann direkt aus dem Bündelausgleich gewonnen werden, nämlich zu: 0 [0031] Durch den Bündelausgleich wird die Objektposition bestimmt, die für alle Kameras den Abstand zwischen den realen Abbildungsdaten und den unter anderem durch die externen Kalibrierungsdaten bestimmten Solldaten

6 minimiert, was in Figur 4 gezeigt ist, welche den Abbildungsstrahlengang auf dem CCD-Chip zeigt. Dabei sind: f Brennweite, S x / S y Skalierungsfaktoren, X /Y Pixelkoordinaten 1 o p Merkmalsvektor in Objektkoordinaten [0032] Im Folgenden ist die Kameraposition im Raum so zu bestimmen, dass die Fehler auf dem Chip eleminiert werden, was heißt, dass der Soll- und der Iststrahl zur Deckung gebracht werden. Soll [0033] Gesucht ist die Matrix T, die den Ist- auf den Sollstrahl abbildet, um im Anschluss an die Nullmessung die Ist Kamerapositionen im Weltkoordinatensystem zu korrigieren. Soll- und Istvektor erlauben die Ermittlung der unnormierten Drehachse v dreh : 2 v dreh = k p ist k p soll [0034] Liegen Welt- und Objektkoordinatensystem aufeinander, so ist k Welt psoll = ( Kamera T) -1 T abs op bzw. der Drehwinkel Θ: 3 v dreh sinθ= k pist kp cos Θ soll [003] Für die Quarterniondarstellung muss die so gewonnene Drehachse normiert werden: 4 [0036] Die Quarternionen q 0 -q 3 der Korrekturmatrix sind nun bekannt mit: 0 6

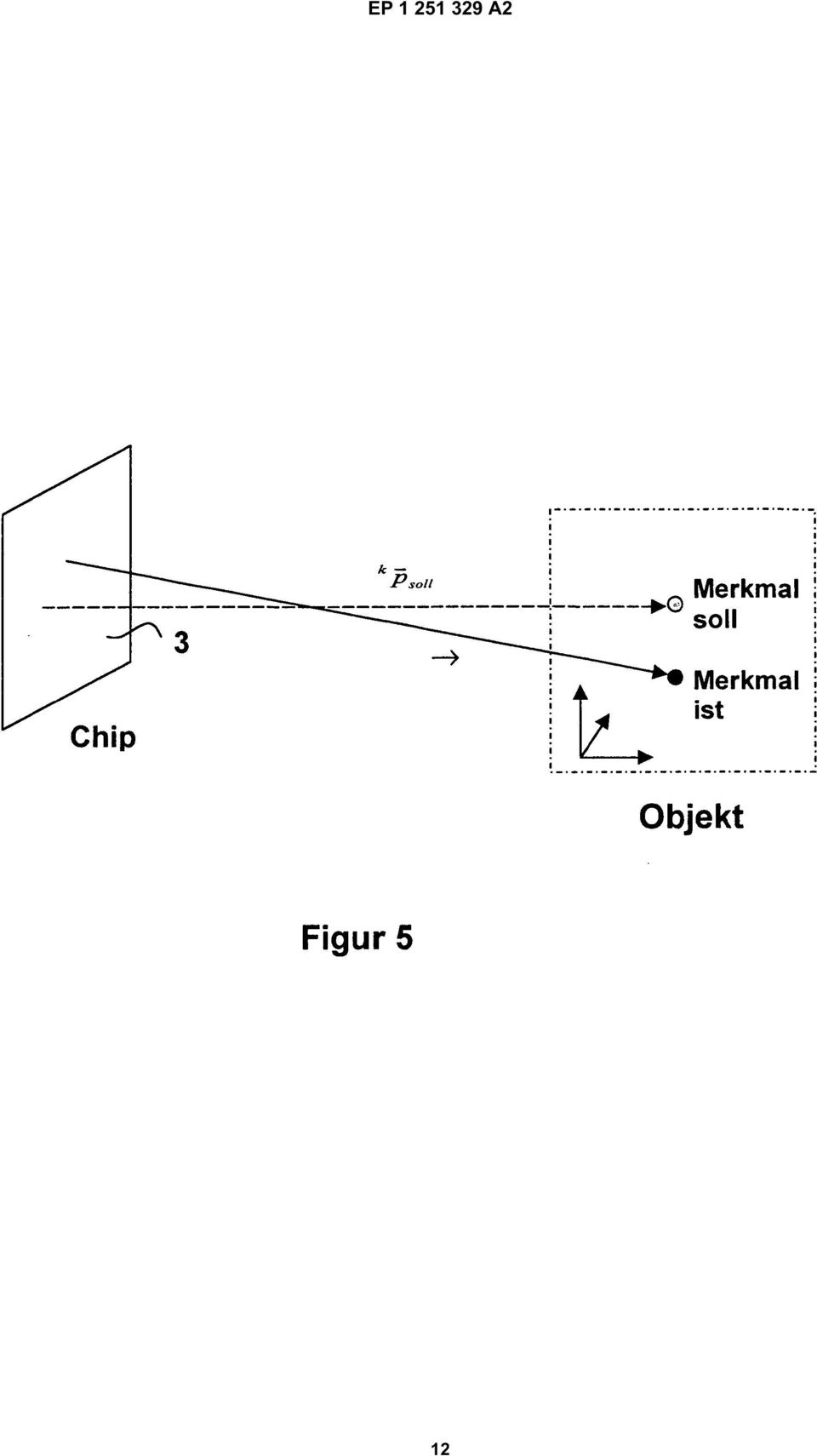
7 [0037] Aus den Quarternionen folgt die Rotationsmatrix: EP A2 mit: [0038] Wird diese Matrix als Korrektur mit der die Kameraposition beschreibenden Matrix multipliziert, so ergeben sich im Arbeitspunkt keine Abweichungen vom Sollzum Iststrahl. [0039] Es sei angemerkt, dass durch diese Prozedur ein Freiheitsgrad nicht bestimmt ist, nämlich: Der Iststrahl kann durch unendlich viele Abbildungen auf den Sollstrahl gedreht werden, da sich keine eindeutige Vorschrift aus den zwei Vektoren Soll und Ist ermitteln lässt. Praktisch bedeutet dies, dass an die Korrekturmatrix noch beliebige Drehungen um den Iststrahl multipliziert werden können, ohne einen Fehler im Arbeitspunkt zu erzeugen. In der Regel lassen sich allerdings die externen Rotationsparameter bereits so gut im Vorhinein bestimmen, dass eine weitere Betrachtung hinfällig wird. [00] Die Kamera wird somit korrigiert mit: 0 Welt WeltAlt KameraT= KameraT?Tkorr II. Arbeitspunktstabilisierung durch Variation der Objektmerkmale: [0041] Analog zum kameraseitigen Verfahren kann durch Verschiebung der physikalischen Objektparameterparameter vom theoretischen, durch die Transformationen bestimmten Abbildungsstrahl, das ist der Sollstrahl, auf den sich tatsächlich 7
![[0039] Es sei angemerkt, dass durch diese Prozedur ein Freiheitsgrad nicht bestimmt ist, nämlich: Der Iststrahl kann durch unendlich viele Abbildungen auf den Sollstrahl gedreht werden, da sich keine](/docs-images/56/9337987/images/page_7.jpg "eindeutige Vorschrift aus den zwei Vektoren Soll und Ist ermitteln lässt.")
8 o pkorr = ( T abs ) -1 Kamera Welt T kp korr einstellenden Iststrahl eine Stabilisierung erzielt werden, was in Figur durch Abbildung von Merkmalen gezeigt ist. [0042] Aus der Figur geht hervor, dass auch diese Abbildung nicht eindeutig ist, da das Merkmal an eine beliebige Stelle auf den Iststrahl geschoben werden kann, um eine Fehlerelimination zu erreichen. Sinnvollerweise ergibt sich Eindeutigkeit allerdings dadurch, dass das Sollmerkmal auf dem kürzesten Weg zum Iststrahl verschoben wird, nämlich: k Welt psoll =( Kamera T) -1 T abs op [0043] Tatsächlich liegt das Merkmal auf dem "gefundenen Strahl", beschrieben durch den normierten Vektor: 1 [0044] Im Kamerakoordinatensystem kann der korrigierte Punkt berechnet werden zu: 2 woraus sich der korrigierte Punkt im Objektkoordinatensystem ergibt: o pkorr = ( T abs ) -1 Kamera Welt T kp korr [004] Nach der sogenannten Referier- oder Nullmessung zur Feststellung des Absolutvektors, Figur 3, werden folglich die Objektmerkmale mit der beschriebenen Methode neu bestimmt und in das System integriert. [0046] Ein Beispiel der Erfindung sei im Folgenden anhand der Figuren 1 bis 7 und insbesondere anhand der Figuren 6 und 7 beschrieben. Sie zeigen das Ergebnis für eine berechnete Objektpositionskoordinate X eines Objektes 2, Figur 2, in Abhängigkeit von der Objektbewegungsrichtung X mit vier bzw. - bei einem Kamera- bzw. einem Merkmalausfall - drei Kameras 1, 1', 1", 1"' gemäß Figur 2, nach einer Nullmessung, wobei T abs mit eingerechnet wird. Hierbei weist eine der Kamera 1, 1', 1'', 1''' eine Störung von Pixeln im Chiphauptpunkt des Chips 3 auf. [0047] Aus Figur 6 wird deutlich, dass die Auswirkungen dieses Fehlers bei der Verwendung aller - vier - Kameras 1, 1', 1", 1"' durch die Nullmessung eliminiert werden. Wird allerdings ein Merkmal nicht erkannt, was in Figur 7 gelten soll, und steht für die Berechnung nicht zur Verfügung, so führen die durch die Störung erzeugten Spannungen zum Sprung des Ergebnisses - das ist die strichpunktierte Linie - während die Berechnung mit den stabilisierenden Systemparametern - eine durchgezogene und eine punktierte Linie liegen in Figur 6 übereinander - zu einem im Arbeitspunkt stabilen Ergebnis führt. [0048] Abschließend ist festzuhalten, dass die kamera- oder objektseitige Arbeitspunktstabilisierung die Folgen von Störungen in den Systemparametern in einem berührungslosen 3D-Messsystem nicht eliminiert. In der Regel stehen bei einem solchen System mehr Kameras als für eine Positionsberechnung nötig zur Verfügung. Das hierdurch entstandene Ausgleichsproblem führt auf eine optimierende Lösung, die allerdings für jede einzelne Kamera Differenzen zwischen Theorie und Wirklichkeit hervorruft. Stehen für die Berechnung nicht mehr alle Kameras zur Verfügung, kommt es zu den beschriebenen Sprüngen um den Arbeitspunkt. Gewerbliche Anwendbarkeit: [0049] Der Gegenstand der Erfindung ist insbesondere zur Stabilisierung des Arbeitspunktes bei berührungsloser 3D-Positionserkennung eines zu vermessenden Objektes mittels wenigstens drei Digitalkameras anwendbar, wenn 8
 -1 T abs op [0043]")
9 entweder eine Kamera des Gesamtsystems ausfällt oder wenn Objektmerkmale variiert worden sind. Analog zum kameraseitigen Verfahren kann durch Verschiebung der physikalischen Objektparameterparameter vom theoretischen, durch die Transformationen bestimmten Abbildungsstrahl auf den sich tatsächlich durch die Transformationen bestimmten Abbildungsstrahl auf den sich tatsächlich einstellenden Iststrahl eine Stabilisierung erzielt werden. Patentansprüche Verfahren zur Arbeitspunktstabilisierung bei berührungsloser 3D- Positionserkennung eines zu vermessenden Objektes (2) mittels wenigstens drei Digitalkameras (1,1',1",1"') mit gegebener Brennweite innerhalb eines digitalen Bildverarbeitungssystems, zur Bestimmung der Position des Objektes (2) bzw. der Position von Merkmalen desselben, unter Kalibrierung der Kameras (1,1',1",1"') auf ein gemeinsames Weltkoordinatensystem, WKS, und anschließender Verbringung des Objektes (2) in den Raum zwischen den Kameras (1,1',1",1"'), wobei die das System beschreibenden Komponenten, nämlich Kameraparameter einer der Kameras oder Objektmerkmale des zu vermessenenden Objektes (2), fehlerhaft vermessen sind und damit die digitalen Kameras (1,1',1",1"') im WKS eine falsche Weltposition aufweisen, dadurch gekennzeichnet, dass unter Heranziehung der Transformationsvorschriften zur Transformation eines dreidimensionalen Punktes ( p w ) gegebener Koordinaten in eine zweidimensionale Rechnerkoordinate (X r /Y r ) des digitalisierten Bildes die Positionsbestimmung mittels eines Bündelausgleichs erfolgt und damit eine Objektposition bestimmt wird, bei der die Summe der Abstände von den 2D-Bilddaten [ (g j int)] der i-ten Merkmale in den j-ten Kameras (1,1',1",1"') zu den durch die Transformationen und den Objektparametern, nämlich Merkmalsvektoren im Objektkoordinatensystem ( o i ), theoretisch gegebenen 2D-Projektionen [q j p (w o T o p i,gj ext)], minimiert wird. i 2. Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass das Weltkoordinatensystem WKS bezüglich geeigneter Startwerte in der Nähe des Objektkoordinatensystems definiert wird und damit die Startwerte für die gesuchte Objektposition zu Null gewählt werden Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass bei einer Arbeitspunktstabilisierung durch Variation der Kameraposition durch einen Bündelausgleich diejenige Objektposition des Objekts (2) bzw. Position von Merkmalen des Objekts (2) bestimmt, welche für alle Kameras (1,1',1",1"') den Abstand zwischen den realen Abbildungsdaten und den durch die externen Kalibrierungsdaten bestimmten Solldaten minimiert, so dass die Kameraposition im Raum so bestimmt wird, dass die Fehler Soll auf dem Chip (3) der Digitalkameras (1,1',1",1"') eliminiert und somit die Matrix ( T) bestimmt wird, welche den Sollvektor ( k soll ) auf dem Istvektor (k Ist p p ist ) abbildet und zur Deckung bringt. 4. Verfahren nach Anspruch 3, dadurch gekennzeichnet, dass aus dem Soll- ( k p soll ) und dem Istvektor (k p ist ) die Drehachse ( v dreh ) ermittelt und daraus eine Quarterniondarstellung gewonnen und aus den Quarternionen eine Rotationsmatrix berechnet wird, welche zur Korrektur mit der die die Kameraposition beschreibenden Matrix multipliziert wird.. Verfahren nach einem der vorherigen Ansprüche, dadurch gekennzeichnet, dass die Kameraposition nach der folgenden Gleichung korrigiert wird: 4 Welt WeltAlt KameraT= KameraT Tkorr 0 6. Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass bei Variation der Objektmerkmale zur Arbeitspunktstabilisierung die physikalischen Objektparameterparameter von den Sollmerkmalen, das ist vom theoretischen, durch die Transformationen bestimmten Abbildungsvektor, Sollvektor ( k p soll ), auf die sich ergebenden Istmerkmale, das ist der sich tatsächlich einstellende Istvektor ( k p ist ), verschoben werden, wobei zur Erzielung einer Eindeutigkeit die Sollmerkmale [Sollvektor (k p soll )] auf dem kürzesten Weg zu den Istmerkmalen [Istvektor ( k p ist )] verschoben werden. 7. Verfahren nach Anspruch 6, dadurch gekennzeichnet, dass sich im Objektkoordinatensystem ein korrigierter Punkt nach folgender Gleichung ergibt: o pkorr = ( T abs ) -1 Kamera Welt T kp korr 9
 mittels wenigstens drei Digitalkameras (1,1',1\",1\"') mit gegebener Brennweite")
10
11 11

12 12
13 13
14 14

(51) Int Cl. 7 : G09F 21/12. (72) Erfinder: Schimanz, Gerhard
 Int Cl. 7 : G09F 21/12. (72) Erfinder: Schimanz, Gerhard") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001411488A1* (11) EP 1 411 488 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 21.04.2004 Patentblatt 2004/17
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001411488A1* (11) EP 1 411 488 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 21.04.2004 Patentblatt 2004/17
(51) Int Cl. 7 : G06K 7/00, G06K 13/08. (72) Erfinder: Baitz, Günter 13629 Berlin (DE) Kamin, Hartmut 10585 Berlin (DE)
 Int Cl. 7 : G06K 7/00, G06K 13/08. (72) Erfinder: Baitz, Günter 13629 Berlin (DE) Kamin, Hartmut 10585 Berlin (DE)") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001347405A1* (11) EP 1 347 405 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 24.09.2003 Patentblatt 2003/39
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001347405A1* (11) EP 1 347 405 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 24.09.2003 Patentblatt 2003/39
EP 1 806 277 A1 (19) (11) EP 1 806 277 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 11.07.2007 Patentblatt 2007/28
 (11) EP 1 806 277 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 11.07.2007 Patentblatt 2007/28") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 806 277 A1 (43) Veröffentlichungstag: 11.07.2007 Patentblatt 2007/28 (21) Anmeldenummer: 06003966.6 (1) Int Cl.: B63H 1/14 (2006.01) B63H 1/26 (2006.01)
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 806 277 A1 (43) Veröffentlichungstag: 11.07.2007 Patentblatt 2007/28 (21) Anmeldenummer: 06003966.6 (1) Int Cl.: B63H 1/14 (2006.01) B63H 1/26 (2006.01)
(51) Int Cl.: B23K 26/28 (2014.01) B23K 26/32 (2014.01) B23K 26/30 (2014.01) B23K 33/00 (2006.01)
 Int Cl.: B23K 26/28 (2014.01) B23K 26/32 (2014.01) B23K 26/30 (2014.01) B23K 33/00 (2006.01)") (19) TEPZZ 87_Z ZA_T (11) EP 2 871 0 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 13.0.1 Patentblatt 1/ (21) Anmeldenummer: 13192326.0 (1) Int Cl.: B23K 26/28 (14.01) B23K 26/32 (14.01)
(19) TEPZZ 87_Z ZA_T (11) EP 2 871 0 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 13.0.1 Patentblatt 1/ (21) Anmeldenummer: 13192326.0 (1) Int Cl.: B23K 26/28 (14.01) B23K 26/32 (14.01)
Europäisches Patentamt European Patent Office Veröffentlichungsnummer: 0 1 42 466 Office europeen des brevets EUROPÄISCHE PATENTANMELDUNG
 J Europäisches Patentamt European Patent Office Veröffentlichungsnummer: 0 1 42 466 Office europeen des brevets A1 EUROPÄISCHE PATENTANMELDUNG Anmeldenummer: 84810442.8 Int.CI.4: G 02 B 25/00 Anmeldetag:
J Europäisches Patentamt European Patent Office Veröffentlichungsnummer: 0 1 42 466 Office europeen des brevets A1 EUROPÄISCHE PATENTANMELDUNG Anmeldenummer: 84810442.8 Int.CI.4: G 02 B 25/00 Anmeldetag:
*EP001363019A2* EP 1 363 019 A2 (19) (11) EP 1 363 019 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 19.11.2003 Patentblatt 2003/47
 (11) EP 1 363 019 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 19.11.2003 Patentblatt 2003/47") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001363019A2* (11) EP 1 363 019 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 19.11.2003 Patentblatt 2003/47
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001363019A2* (11) EP 1 363 019 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 19.11.2003 Patentblatt 2003/47
*EP001201606A1* EP 1 201 606 A1 (19) (11) EP 1 201 606 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 02.05.2002 Patentblatt 2002/18
 (11) EP 1 201 606 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 02.05.2002 Patentblatt 2002/18") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001201606A1* (11) EP 1 201 606 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 02.05.2002 Patentblatt 2002/18
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001201606A1* (11) EP 1 201 606 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 02.05.2002 Patentblatt 2002/18
EP 1 750 416 A1 (19) (11) EP 1 750 416 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 07.02.2007 Patentblatt 2007/06
 (11) EP 1 750 416 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 07.02.2007 Patentblatt 2007/06") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 750 416 A1 (43) Veröffentlichungstag: 07.02.2007 Patentblatt 2007/06 (51) Int Cl.: H04L 29/12 (2006.01) (21) Anmeldenummer: 05016706.3 (22) Anmeldetag: 01.08.2005
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 750 416 A1 (43) Veröffentlichungstag: 07.02.2007 Patentblatt 2007/06 (51) Int Cl.: H04L 29/12 (2006.01) (21) Anmeldenummer: 05016706.3 (22) Anmeldetag: 01.08.2005
*EP001258445A1* EP 1 258 445 A1 (19) (11) EP 1 258 445 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 20.11.2002 Patentblatt 2002/47
 (11) EP 1 258 445 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 20.11.2002 Patentblatt 2002/47") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001258445A1* (11) EP 1 258 445 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 20.11.2002 Patentblatt 2002/47
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001258445A1* (11) EP 1 258 445 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 20.11.2002 Patentblatt 2002/47
(51) Int Cl.: F24J 2/52 (2006.01) H01L 31/048 (2006.01)
 Int Cl.: F24J 2/52 (2006.01) H01L 31/048 (2006.01)") (19) Europäisches Patentamt European Patent Office Office européen des brevets (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 705 434 A1 (43) Veröffentlichungstag: 27.09.2006 Patentblatt 2006/39 (51) Int Cl.:
(19) Europäisches Patentamt European Patent Office Office européen des brevets (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 705 434 A1 (43) Veröffentlichungstag: 27.09.2006 Patentblatt 2006/39 (51) Int Cl.:
*EP001308563A2* EP 1 308 563 A2 (19) (11) EP 1 308 563 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 07.05.2003 Patentblatt 2003/19
 (11) EP 1 308 563 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 07.05.2003 Patentblatt 2003/19") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP00130863A2* (11) EP 1 308 63 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 07.0.2003 Patentblatt 2003/19
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP00130863A2* (11) EP 1 308 63 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 07.0.2003 Patentblatt 2003/19
*EP001146759A2* EP 1 146 759 A2 (19) (11) EP 1 146 759 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 17.10.2001 Patentblatt 2001/42
 (11) EP 1 146 759 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 17.10.2001 Patentblatt 2001/42") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP00114679A2* (11) EP 1 146 79 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 17..01 Patentblatt 01/42 (1)
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP00114679A2* (11) EP 1 146 79 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 17..01 Patentblatt 01/42 (1)
TEPZZ 8 4 6A_T EP 2 824 226 A1 (19) (11) EP 2 824 226 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (51) Int Cl.: D04B 1/22 (2006.01)
 (11) EP 2 824 226 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (51) Int Cl.: D04B 1/22 (2006.01)") (19) TEPZZ 8 4 6A_T (11) EP 2 824 226 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 14.01.1 Patentblatt 1/03 (1) Int Cl.: D04B 1/22 (06.01) (21) Anmeldenummer: 13176318.7 (22) Anmeldetag:
(19) TEPZZ 8 4 6A_T (11) EP 2 824 226 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 14.01.1 Patentblatt 1/03 (1) Int Cl.: D04B 1/22 (06.01) (21) Anmeldenummer: 13176318.7 (22) Anmeldetag:
Hinweise zur Kalibrierung von Kameras mit einer AICON Kalibriertafel
 Hinweise zur Kalibrierung von Kameras mit einer AICON Kalibriertafel AICON 3D Systems GmbH Celler Straße 32 D-38114 Braunschweig Telefon: +49 (0) 5 31 58 000 58 Fax: +49 (0) 5 31 58 000 60 Email: info@aicon.de
Hinweise zur Kalibrierung von Kameras mit einer AICON Kalibriertafel AICON 3D Systems GmbH Celler Straße 32 D-38114 Braunschweig Telefon: +49 (0) 5 31 58 000 58 Fax: +49 (0) 5 31 58 000 60 Email: info@aicon.de
Int CI.3: B 01 D 53/02 F 04 C 29/02, F 01 C 21/04
 European Patent Office Office europeen des brevets Veröffentlichungsnummer: 0 024 595 A1 EUROPAISCHE PATENTANMELDUNG Anmeldenummer: 80104649.1 Anmeldetag: 06.08.80 Int CI.3: B 01 D 53/02 F 04 C 29/02,
European Patent Office Office europeen des brevets Veröffentlichungsnummer: 0 024 595 A1 EUROPAISCHE PATENTANMELDUNG Anmeldenummer: 80104649.1 Anmeldetag: 06.08.80 Int CI.3: B 01 D 53/02 F 04 C 29/02,
EP 1 085 737 A2 (19) (11) EP 1 085 737 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 21.03.2001 Patentblatt 2001/12
 (11) EP 1 085 737 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 21.03.2001 Patentblatt 2001/12") (19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 08 737 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 21.03.01 Patentblatt 01/12 (1) Int. Cl. 7
(19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 08 737 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 21.03.01 Patentblatt 01/12 (1) Int. Cl. 7
*EP001107410A2* EP 1 107 410 A2 (19) (11) EP 1 107 410 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 13.06.2001 Patentblatt 2001/24
 (11) EP 1 107 410 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 13.06.2001 Patentblatt 2001/24") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001107410A2* (11) EP 1 107 410 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 13.06.2001 Patentblatt 2001/24
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001107410A2* (11) EP 1 107 410 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 13.06.2001 Patentblatt 2001/24
*EP001506783A1* EP 1 506 783 A1 (19) (11) EP 1 506 783 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 16.02.2005 Patentblatt 2005/07
 (11) EP 1 506 783 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 16.02.2005 Patentblatt 2005/07") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001506783A1* (11) EP 1 506 783 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 16.02.2005 Patentblatt 2005/07
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001506783A1* (11) EP 1 506 783 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 16.02.2005 Patentblatt 2005/07
*EP001557907A2* EP 1 557 907 A2 (19) (11) EP 1 557 907 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 27.07.2005 Patentblatt 2005/30
 (11) EP 1 557 907 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 27.07.2005 Patentblatt 2005/30") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP0017907A2* (11) EP 1 7 907 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 27.07.200 Patentblatt 200/30
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP0017907A2* (11) EP 1 7 907 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 27.07.200 Patentblatt 200/30
EP 1 715 404 A1 (19) (11) EP 1 715 404 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 25.10.2006 Patentblatt 2006/43
 (11) EP 1 715 404 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 25.10.2006 Patentblatt 2006/43") (19) Europäisches Patentamt European Patent Office Office européen des brevets (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 715 404 A1 (43) Veröffentlichungstag: 25.10.2006 Patentblatt 2006/43 (51) Int Cl.:
(19) Europäisches Patentamt European Patent Office Office européen des brevets (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 715 404 A1 (43) Veröffentlichungstag: 25.10.2006 Patentblatt 2006/43 (51) Int Cl.:
EP 1 048 911 A1 (19) (11) EP 1 048 911 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 02.11.2000 Patentblatt 2000/44
 (11) EP 1 048 911 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 02.11.2000 Patentblatt 2000/44") (19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 048 911 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 02.11.2000 Patentblatt 2000/44 (51) Int.
(19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 048 911 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 02.11.2000 Patentblatt 2000/44 (51) Int.
(54) Verfahren zum Weiterführen eines Gesprächs durch Erzeugen einer R- Gespräch- Telefonverbindung bei aufgebrauchtem Prepaid- Karten- Guthaben
 Verfahren zum Weiterführen eines Gesprächs durch Erzeugen einer R- Gespräch- Telefonverbindung bei aufgebrauchtem Prepaid- Karten- Guthaben") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 777 932 A1 (43) Veröffentlichungstag: 2.04.2007 Patentblatt 2007/17 (21) Anmeldenummer: 0023089. (1) Int Cl.: H04M 1/00 (2006.01) H04M 17/00 (2006.01) H04M
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 777 932 A1 (43) Veröffentlichungstag: 2.04.2007 Patentblatt 2007/17 (21) Anmeldenummer: 0023089. (1) Int Cl.: H04M 1/00 (2006.01) H04M 17/00 (2006.01) H04M
Professionelle Seminare im Bereich MS-Office
 Der Name BEREICH.VERSCHIEBEN() ist etwas unglücklich gewählt. Man kann mit der Funktion Bereiche zwar verschieben, man kann Bereiche aber auch verkleinern oder vergrößern. Besser wäre es, die Funktion
Der Name BEREICH.VERSCHIEBEN() ist etwas unglücklich gewählt. Man kann mit der Funktion Bereiche zwar verschieben, man kann Bereiche aber auch verkleinern oder vergrößern. Besser wäre es, die Funktion
*EP001130888A1* EP 1 130 888 A1 (19) (11) EP 1 130 888 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 05.09.2001 Patentblatt 2001/36
 (11) EP 1 130 888 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 05.09.2001 Patentblatt 2001/36") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001130888A1* (11) EP 1 130 888 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 05.09.2001 Patentblatt 2001/36
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001130888A1* (11) EP 1 130 888 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 05.09.2001 Patentblatt 2001/36
EP 1 906 377 A1 (19) (11) EP 1 906 377 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 02.04.2008 Patentblatt 2008/14
 (11) EP 1 906 377 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 02.04.2008 Patentblatt 2008/14") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 906 377 A1 (43) Veröffentlichungstag: 02.04.2008 Patentblatt 2008/14 (1) Int Cl.: G09B /00 (2006.01) G09B 19/00 (2006.01) (21) Anmeldenummer: 07017047.7
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 906 377 A1 (43) Veröffentlichungstag: 02.04.2008 Patentblatt 2008/14 (1) Int Cl.: G09B /00 (2006.01) G09B 19/00 (2006.01) (21) Anmeldenummer: 07017047.7
Zeichen bei Zahlen entschlüsseln
 Zeichen bei Zahlen entschlüsseln In diesem Kapitel... Verwendung des Zahlenstrahls Absolut richtige Bestimmung von absoluten Werten Operationen bei Zahlen mit Vorzeichen: Addieren, Subtrahieren, Multiplizieren
Zeichen bei Zahlen entschlüsseln In diesem Kapitel... Verwendung des Zahlenstrahls Absolut richtige Bestimmung von absoluten Werten Operationen bei Zahlen mit Vorzeichen: Addieren, Subtrahieren, Multiplizieren
*EP001243288A2* EP 1 243 288 A2 (19) (11) EP 1 243 288 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 25.09.2002 Patentblatt 2002/39
 (11) EP 1 243 288 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 25.09.2002 Patentblatt 2002/39") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001243288A2* (11) EP 1 243 288 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 2.09.2002 Patentblatt 2002/39
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001243288A2* (11) EP 1 243 288 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 2.09.2002 Patentblatt 2002/39
50. Mathematik-Olympiade 2. Stufe (Regionalrunde) Klasse 11 13. 501322 Lösung 10 Punkte
 Klasse 11 13. 501322 Lösung 10 Punkte") 50. Mathematik-Olympiade. Stufe (Regionalrunde) Klasse 3 Lösungen c 00 Aufgabenausschuss des Mathematik-Olympiaden e.v. www.mathematik-olympiaden.de. Alle Rechte vorbehalten. 503 Lösung 0 Punkte Es seien
50. Mathematik-Olympiade. Stufe (Regionalrunde) Klasse 3 Lösungen c 00 Aufgabenausschuss des Mathematik-Olympiaden e.v. www.mathematik-olympiaden.de. Alle Rechte vorbehalten. 503 Lösung 0 Punkte Es seien
EP 1 977 674 A2 (19) (11) EP 1 977 674 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 08.10.2008 Patentblatt 2008/41
 (11) EP 1 977 674 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 08.10.2008 Patentblatt 2008/41") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 977 674 A2 (43) Veröffentlichungstag: 08.10.2008 Patentblatt 2008/41 (1) Int Cl.: A47L 2/00 (2006.01) (21) Anmeldenummer: 0800406.7 (22) Anmeldetag: 22.03.2008
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 977 674 A2 (43) Veröffentlichungstag: 08.10.2008 Patentblatt 2008/41 (1) Int Cl.: A47L 2/00 (2006.01) (21) Anmeldenummer: 0800406.7 (22) Anmeldetag: 22.03.2008
Würfelt man dabei je genau 10 - mal eine 1, 2, 3, 4, 5 und 6, so beträgt die Anzahl. der verschiedenen Reihenfolgen, in denen man dies tun kann, 60!.
 040304 Übung 9a Analysis, Abschnitt 4, Folie 8 Die Wahrscheinlichkeit, dass bei n - maliger Durchführung eines Zufallexperiments ein Ereignis A ( mit Wahrscheinlichkeit p p ( A ) ) für eine beliebige Anzahl
040304 Übung 9a Analysis, Abschnitt 4, Folie 8 Die Wahrscheinlichkeit, dass bei n - maliger Durchführung eines Zufallexperiments ein Ereignis A ( mit Wahrscheinlichkeit p p ( A ) ) für eine beliebige Anzahl
EP 1 726 825 A1 (19) (11) EP 1 726 825 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 29.11.2006 Patentblatt 2006/48
 (11) EP 1 726 825 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 29.11.2006 Patentblatt 2006/48") (19) Europäisches Patentamt European Patent Office Office européen des brevets (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 726 825 A1 (43) Veröffentlichungstag: 29.11.2006 Patentblatt 2006/48 (51) Int Cl.:
(19) Europäisches Patentamt European Patent Office Office européen des brevets (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 726 825 A1 (43) Veröffentlichungstag: 29.11.2006 Patentblatt 2006/48 (51) Int Cl.:
EP 2 025 352 A1 (19) (11) EP 2 025 352 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 18.02.2009 Patentblatt 2009/08
 (11) EP 2 025 352 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 18.02.2009 Patentblatt 2009/08") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 025 352 A1 (43) Veröffentlichungstag: 18.02.2009 Patentblatt 2009/08 (51) Int Cl.: A61L 12/08 (2006.01) A61L 12/12 (2006.01) (21) Anmeldenummer: 07114144.4
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 025 352 A1 (43) Veröffentlichungstag: 18.02.2009 Patentblatt 2009/08 (51) Int Cl.: A61L 12/08 (2006.01) A61L 12/12 (2006.01) (21) Anmeldenummer: 07114144.4
Printed by Jouve, 75001 PARIS (FR)
") (19) (12) Europäisches Patentamt European Patent Office Office europeen»peen des brevets EP0815 824A2 EUROPÄISCHE PATENTANMELDUNG (43) Veroffentlichungstag: (51) nt CI A61H 39/00, A61 N 5/06 07.01.1998
(19) (12) Europäisches Patentamt European Patent Office Office europeen»peen des brevets EP0815 824A2 EUROPÄISCHE PATENTANMELDUNG (43) Veroffentlichungstag: (51) nt CI A61H 39/00, A61 N 5/06 07.01.1998
Lineare Gleichungssysteme
 Brückenkurs Mathematik TU Dresden 2015 Lineare Gleichungssysteme Schwerpunkte: Modellbildung geometrische Interpretation Lösungsmethoden Prof. Dr. F. Schuricht TU Dresden, Fachbereich Mathematik auf der
Brückenkurs Mathematik TU Dresden 2015 Lineare Gleichungssysteme Schwerpunkte: Modellbildung geometrische Interpretation Lösungsmethoden Prof. Dr. F. Schuricht TU Dresden, Fachbereich Mathematik auf der
TEPZZ 86ZZ 4A_T EP 2 860 024 A1 (19) (11) EP 2 860 024 A1 (12) EUROPÄISCHE PATENTANMELDUNG
 (11) EP 2 860 024 A1 (12) EUROPÄISCHE PATENTANMELDUNG") (19) TEPZZ 86ZZ 4A_T (11) EP 2 860 024 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 1.04.1 Patentblatt 1/16 (21) Anmeldenummer: 13187709.4 (1) Int Cl.: B31B 1/2 (06.01) B23K 26/ (14.01)
(19) TEPZZ 86ZZ 4A_T (11) EP 2 860 024 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 1.04.1 Patentblatt 1/16 (21) Anmeldenummer: 13187709.4 (1) Int Cl.: B31B 1/2 (06.01) B23K 26/ (14.01)
Computer Vision I. Nikos Canterakis. Lehrstuhl für Mustererkennung, Universität Freiburg
 Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 6 Endliche Kameras Die Lochkamera Die Projektive Kamera Die projektive Kamera Spalten von P Zeilen von P Hauptpunkt und Hauptachse
Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 6 Endliche Kameras Die Lochkamera Die Projektive Kamera Die projektive Kamera Spalten von P Zeilen von P Hauptpunkt und Hauptachse
Kapitalerhöhung - Verbuchung
 Kapitalerhöhung - Verbuchung Beschreibung Eine Kapitalerhöhung ist eine Erhöhung des Aktienkapitals einer Aktiengesellschaft durch Emission von en Aktien. Es gibt unterschiedliche Formen von Kapitalerhöhung.
Kapitalerhöhung - Verbuchung Beschreibung Eine Kapitalerhöhung ist eine Erhöhung des Aktienkapitals einer Aktiengesellschaft durch Emission von en Aktien. Es gibt unterschiedliche Formen von Kapitalerhöhung.
Lineare Funktionen. 1 Proportionale Funktionen 3 1.1 Definition... 3 1.2 Eigenschaften... 3. 2 Steigungsdreieck 3
 Lineare Funktionen Inhaltsverzeichnis 1 Proportionale Funktionen 3 1.1 Definition............................... 3 1.2 Eigenschaften............................. 3 2 Steigungsdreieck 3 3 Lineare Funktionen
Lineare Funktionen Inhaltsverzeichnis 1 Proportionale Funktionen 3 1.1 Definition............................... 3 1.2 Eigenschaften............................. 3 2 Steigungsdreieck 3 3 Lineare Funktionen
Austausch- bzw. Übergangsprozesse und Gleichgewichtsverteilungen
 Austausch- bzw. Übergangsrozesse und Gleichgewichtsverteilungen Wir betrachten ein System mit verschiedenen Zuständen, zwischen denen ein Austausch stattfinden kann. Etwa soziale Schichten in einer Gesellschaft:
Austausch- bzw. Übergangsrozesse und Gleichgewichtsverteilungen Wir betrachten ein System mit verschiedenen Zuständen, zwischen denen ein Austausch stattfinden kann. Etwa soziale Schichten in einer Gesellschaft:
6.2 Scan-Konvertierung (Scan Conversion)
") 6.2 Scan-Konvertierung (Scan Conversion) Scan-Konvertierung ist die Rasterung von einfachen Objekten (Geraden, Kreisen, Kurven). Als Ausgabemedium dient meist der Bildschirm, der aus einem Pixelraster
6.2 Scan-Konvertierung (Scan Conversion) Scan-Konvertierung ist die Rasterung von einfachen Objekten (Geraden, Kreisen, Kurven). Als Ausgabemedium dient meist der Bildschirm, der aus einem Pixelraster
(51) Int Cl.: B60R 25/10 (2006.01) G07B 15/04 (2006.01)
 Int Cl.: B60R 25/10 (2006.01) G07B 15/04 (2006.01)") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 088 041 A1 (43) Veröffentlichungstag: 12.08.2009 Patentblatt 2009/33 (1) Int Cl.: B60R 2/10 (2006.01) G07B 1/04 (2006.01) (21) Anmeldenummer: 08002316.1
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 2 088 041 A1 (43) Veröffentlichungstag: 12.08.2009 Patentblatt 2009/33 (1) Int Cl.: B60R 2/10 (2006.01) G07B 1/04 (2006.01) (21) Anmeldenummer: 08002316.1
1 Mathematische Grundlagen
 Mathematische Grundlagen - 1-1 Mathematische Grundlagen Der Begriff der Menge ist einer der grundlegenden Begriffe in der Mathematik. Mengen dienen dazu, Dinge oder Objekte zu einer Einheit zusammenzufassen.
Mathematische Grundlagen - 1-1 Mathematische Grundlagen Der Begriff der Menge ist einer der grundlegenden Begriffe in der Mathematik. Mengen dienen dazu, Dinge oder Objekte zu einer Einheit zusammenzufassen.
*EP001367686A2* EP 1 367 686 A2 (19) (11) EP 1 367 686 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 03.12.2003 Patentblatt 2003/49
 (11) EP 1 367 686 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 03.12.2003 Patentblatt 2003/49") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001367686A2* (11) EP 1 367 686 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 03.12.03 Patentblatt 03/49
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001367686A2* (11) EP 1 367 686 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 03.12.03 Patentblatt 03/49
PATENTANMELDUNG. int. Ci.5; H05K 3/34, B23K 3/06, B23K 3/08, H05K 13/00
 Europäisches Patentamt European Patent Office Office europeen des brevets Veröffentlichungsnummer: 0 562 243 AI EUROPAISCHE PATENTANMELDUNG Anmeldenummer: 93101688.5 @ Anmeldetag: 04.02.93 int. Ci.5; H05K
Europäisches Patentamt European Patent Office Office europeen des brevets Veröffentlichungsnummer: 0 562 243 AI EUROPAISCHE PATENTANMELDUNG Anmeldenummer: 93101688.5 @ Anmeldetag: 04.02.93 int. Ci.5; H05K
EP 1 001 509 A2 (19) (11) EP 1 001 509 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 17.05.2000 Patentblatt 2000/20
 (11) EP 1 001 509 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 17.05.2000 Patentblatt 2000/20") (19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 001 09 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 17.0.2000 Patentblatt 2000/20 (1) Int. Cl.
(19) Europäisches Patentamt European Patent Office Office européen des brevets (11) EP 1 001 09 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 17.0.2000 Patentblatt 2000/20 (1) Int. Cl.
Lineare Gleichungssysteme
 Lineare Gleichungssysteme 1 Zwei Gleichungen mit zwei Unbekannten Es kommt häufig vor, dass man nicht mit einer Variablen alleine auskommt, um ein Problem zu lösen. Das folgende Beispiel soll dies verdeutlichen
Lineare Gleichungssysteme 1 Zwei Gleichungen mit zwei Unbekannten Es kommt häufig vor, dass man nicht mit einer Variablen alleine auskommt, um ein Problem zu lösen. Das folgende Beispiel soll dies verdeutlichen
8. Berechnung der kalkulatorischen Zinsen
 8. Berechnung der kalkulatorischen Zinsen 8.1. Allgemeines In der laufenden Rechnung werden im Konto 322.00 Zinsen nur die ermittelten Fremdkapitalzinsen erfasst. Sobald aber eine Betriebsabrechnung erstellt
8. Berechnung der kalkulatorischen Zinsen 8.1. Allgemeines In der laufenden Rechnung werden im Konto 322.00 Zinsen nur die ermittelten Fremdkapitalzinsen erfasst. Sobald aber eine Betriebsabrechnung erstellt
*EP A1* EP A1 (19) (11) EP A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: Patentblatt 2005/13
 (11) EP A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: Patentblatt 2005/13") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001518723A1* (11) EP 1 518 723 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 30.03.2005 Patentblatt 2005/13
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001518723A1* (11) EP 1 518 723 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 30.03.2005 Patentblatt 2005/13
Welche Lagen können zwei Geraden (im Raum) zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen?
 zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen?") Welche Lagen können zwei Geraden (im Raum) zueinander haben? Welche Lagen können zwei Ebenen (im Raum) zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen? Wie heiÿt
Welche Lagen können zwei Geraden (im Raum) zueinander haben? Welche Lagen können zwei Ebenen (im Raum) zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen? Wie heiÿt
*EP001274048A2* EP 1 274 048 A2 (19) (11) EP 1 274 048 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 08.01.2003 Patentblatt 2003/02
 (11) EP 1 274 048 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 08.01.2003 Patentblatt 2003/02") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP0012748A2* (11) EP 1 274 048 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 08.01.03 Patentblatt 03/02
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP0012748A2* (11) EP 1 274 048 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 08.01.03 Patentblatt 03/02
*EP001468709A1* EP 1 468 709 A1 (19) (11) EP 1 468 709 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 20.10.2004 Patentblatt 2004/43
 (11) EP 1 468 709 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 20.10.2004 Patentblatt 2004/43") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001468709A1* (11) EP 1 468 709 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 20.10.2004 Patentblatt 2004/43
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001468709A1* (11) EP 1 468 709 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 20.10.2004 Patentblatt 2004/43
Theoretische Grundlagen der Informatik WS 09/10
 Theoretische Grundlagen der Informatik WS 09/10 - Tutorium 6 - Michael Kirsten und Kai Wallisch Sitzung 13 02.02.2010 Inhaltsverzeichnis 1 Formeln zur Berechnung Aufgabe 1 2 Hamming-Distanz Aufgabe 2 3
Theoretische Grundlagen der Informatik WS 09/10 - Tutorium 6 - Michael Kirsten und Kai Wallisch Sitzung 13 02.02.2010 Inhaltsverzeichnis 1 Formeln zur Berechnung Aufgabe 1 2 Hamming-Distanz Aufgabe 2 3
PATENTANMELDUNG. Int. CIA B23K 3/047, H05K 13/04
 Europäisches Patentamt J European Patent Office Office europeen des brevets Veröffentlichungsnummer: 0 41 9 996 A2 EUROPÄISCHE PATENTANMELDUNG Anmeldenummer: 90117874.9 Int. CIA B23K 3/047, H05K 13/04
Europäisches Patentamt J European Patent Office Office europeen des brevets Veröffentlichungsnummer: 0 41 9 996 A2 EUROPÄISCHE PATENTANMELDUNG Anmeldenummer: 90117874.9 Int. CIA B23K 3/047, H05K 13/04
Die Gleichung A x = a hat für A 0 die eindeutig bestimmte Lösung. Für A=0 und a 0 existiert keine Lösung.
 Lineare Gleichungen mit einer Unbekannten Die Grundform der linearen Gleichung mit einer Unbekannten x lautet A x = a Dabei sind A, a reelle Zahlen. Die Gleichung lösen heißt, alle reellen Zahlen anzugeben,
Lineare Gleichungen mit einer Unbekannten Die Grundform der linearen Gleichung mit einer Unbekannten x lautet A x = a Dabei sind A, a reelle Zahlen. Die Gleichung lösen heißt, alle reellen Zahlen anzugeben,
Welche Unterschiede gibt es zwischen einem CAPAund einem Audiometrie- Test?
 Welche Unterschiede gibt es zwischen einem CAPAund einem Audiometrie- Test? Auch wenn die Messungsmethoden ähnlich sind, ist das Ziel beider Systeme jedoch ein anderes. Gwenolé NEXER g.nexer@hearin gp
Welche Unterschiede gibt es zwischen einem CAPAund einem Audiometrie- Test? Auch wenn die Messungsmethoden ähnlich sind, ist das Ziel beider Systeme jedoch ein anderes. Gwenolé NEXER g.nexer@hearin gp
(51) Intel e H04Q 7/38. Leifeld, Christoph, Dipl.-lng.
 Intel e H04Q 7/38. Leifeld, Christoph, Dipl.-lng.") (19) (12) Europäisches Patentamt European Patent Office Office europeen»peen des brevets EP 0 955 782 A2 EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 10.11.1999 Patentblatt 1999/45 (51) Intel
(19) (12) Europäisches Patentamt European Patent Office Office europeen»peen des brevets EP 0 955 782 A2 EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 10.11.1999 Patentblatt 1999/45 (51) Intel
Die reellen Lösungen der kubischen Gleichung
 Die reellen Lösungen der kubischen Gleichung Klaus-R. Löffler Inhaltsverzeichnis 1 Einfach zu behandelnde Sonderfälle 1 2 Die ganzrationale Funktion dritten Grades 2 2.1 Reduktion...........................................
Die reellen Lösungen der kubischen Gleichung Klaus-R. Löffler Inhaltsverzeichnis 1 Einfach zu behandelnde Sonderfälle 1 2 Die ganzrationale Funktion dritten Grades 2 2.1 Reduktion...........................................
Unterrichtsmaterialien in digitaler und in gedruckter Form. Auszug aus: Übungsbuch für den Grundkurs mit Tipps und Lösungen: Analysis
 Unterrichtsmaterialien in digitaler und in gedruckter Form Auszug aus: Übungsbuch für den Grundkurs mit Tipps und Lösungen: Analysis Das komplette Material finden Sie hier: Download bei School-Scout.de
Unterrichtsmaterialien in digitaler und in gedruckter Form Auszug aus: Übungsbuch für den Grundkurs mit Tipps und Lösungen: Analysis Das komplette Material finden Sie hier: Download bei School-Scout.de
*EP001128652A2* EP 1 128 652 A2 (19) (11) EP 1 128 652 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 29.08.2001 Patentblatt 2001/35
 (11) EP 1 128 652 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 29.08.2001 Patentblatt 2001/35") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP00112862A2* (11) EP 1 128 62 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 29.08.01 Patentblatt 01/3 (1)
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP00112862A2* (11) EP 1 128 62 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 29.08.01 Patentblatt 01/3 (1)
Ohne Fehler geht es nicht Doch wie viele Fehler sind erlaubt?
 Ohne Fehler geht es nicht Doch wie viele Fehler sind erlaubt? Behandelte Fragestellungen Was besagt eine Fehlerquote? Welche Bezugsgröße ist geeignet? Welche Fehlerquote ist gerade noch zulässig? Wie stellt
Ohne Fehler geht es nicht Doch wie viele Fehler sind erlaubt? Behandelte Fragestellungen Was besagt eine Fehlerquote? Welche Bezugsgröße ist geeignet? Welche Fehlerquote ist gerade noch zulässig? Wie stellt
Codierungsverfahren SS 2011. Reed-Solomon-Codes zur Mehrblock-Bündelfehler-Korrektur
 Reed-Solomon-Codes zur Mehrblock-Bündelfehler-Korrektur Wie die zyklischen BCH-Codes zur Mehrbitfehler-Korrektur eignen sich auch die sehr verwandten Reed-Solomon-Codes (= RS-Codes) zur Mehrbitfehler-Korrektur.
Reed-Solomon-Codes zur Mehrblock-Bündelfehler-Korrektur Wie die zyklischen BCH-Codes zur Mehrbitfehler-Korrektur eignen sich auch die sehr verwandten Reed-Solomon-Codes (= RS-Codes) zur Mehrbitfehler-Korrektur.
Lineargleichungssysteme: Additions-/ Subtraktionsverfahren
 Lineargleichungssysteme: Additions-/ Subtraktionsverfahren W. Kippels 22. Februar 2014 Inhaltsverzeichnis 1 Einleitung 2 2 Lineargleichungssysteme zweiten Grades 2 3 Lineargleichungssysteme höheren als
Lineargleichungssysteme: Additions-/ Subtraktionsverfahren W. Kippels 22. Februar 2014 Inhaltsverzeichnis 1 Einleitung 2 2 Lineargleichungssysteme zweiten Grades 2 3 Lineargleichungssysteme höheren als
Die Übereckperspektive mit zwei Fluchtpunkten
 Perspektive Perspektive mit zwei Fluchtpunkten (S. 1 von 8) / www.kunstbrowser.de Die Übereckperspektive mit zwei Fluchtpunkten Bei dieser Perspektivart wird der rechtwinklige Körper so auf die Grundebene
Perspektive Perspektive mit zwei Fluchtpunkten (S. 1 von 8) / www.kunstbrowser.de Die Übereckperspektive mit zwei Fluchtpunkten Bei dieser Perspektivart wird der rechtwinklige Körper so auf die Grundebene
(1) Problemstellung. (2) Kalman Filter
 Problemstellung. (2) Kalman Filter") Inhaltsverzeichnis (1) Problemstellung...2 (2) Kalman Filter...2 Funktionsweise... 2 Gleichungen im mehrdimensionalen Fall...3 Schätzung des Systemzustands...3 Vermuteter Schätzfehler... 3 Aktualisierung
Inhaltsverzeichnis (1) Problemstellung...2 (2) Kalman Filter...2 Funktionsweise... 2 Gleichungen im mehrdimensionalen Fall...3 Schätzung des Systemzustands...3 Vermuteter Schätzfehler... 3 Aktualisierung
*EP001100245A2* EP 1 100 245 A2 (19) (11) EP 1 100 245 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 16.05.2001 Patentblatt 2001/20
 (11) EP 1 100 245 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 16.05.2001 Patentblatt 2001/20") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001024A2* (11) EP 1 0 24 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 16.0.01 Patentblatt 01/ (1) Int
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP001024A2* (11) EP 1 0 24 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 16.0.01 Patentblatt 01/ (1) Int
*EP001220550A2* EP 1 220 550 A2 (19) (11) EP 1 220 550 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 03.07.2002 Patentblatt 2002/27
 (11) EP 1 220 550 A2 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 03.07.2002 Patentblatt 2002/27") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP0012200A2* (11) EP 1 220 0 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 03.07.2002 Patentblatt 2002/27
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP0012200A2* (11) EP 1 220 0 A2 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 03.07.2002 Patentblatt 2002/27
EP 1 742 445 A1 (19) (11) EP 1 742 445 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 10.01.2007 Patentblatt 2007/02
 (11) EP 1 742 445 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 10.01.2007 Patentblatt 2007/02") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 742 445 A1 (43) Veröffentlichungstag: 10.01.2007 Patentblatt 2007/02 (51) Int Cl.: H04L 29/12 (2006.01) (21) Anmeldenummer: 05014694.3 (22) Anmeldetag: 06.07.2005
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 742 445 A1 (43) Veröffentlichungstag: 10.01.2007 Patentblatt 2007/02 (51) Int Cl.: H04L 29/12 (2006.01) (21) Anmeldenummer: 05014694.3 (22) Anmeldetag: 06.07.2005
Tangentengleichung. Wie lautet die Geradengleichung für die Tangente, y T =? Antwort:
 Tangentengleichung Wie Sie wissen, gibt die erste Ableitung einer Funktion deren Steigung an. Betrachtet man eine fest vorgegebene Stelle, gibt f ( ) also die Steigung der Kurve und somit auch die Steigung
Tangentengleichung Wie Sie wissen, gibt die erste Ableitung einer Funktion deren Steigung an. Betrachtet man eine fest vorgegebene Stelle, gibt f ( ) also die Steigung der Kurve und somit auch die Steigung
TEPZZ 8Z_7Z A_T EP 2 801 703 A1 (19) (11) EP 2 801 703 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 12.11.2014 Patentblatt 2014/46
 (11) EP 2 801 703 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 12.11.2014 Patentblatt 2014/46") (19) TEPZZ 8Z_7Z A_T (11) EP 2 801 703 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 12.11.14 Patentblatt 14/46 (1) Int Cl.: F01D 11/04 (06.01) (21) Anmeldenummer: 131669.8 (22) Anmeldetag:
(19) TEPZZ 8Z_7Z A_T (11) EP 2 801 703 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 12.11.14 Patentblatt 14/46 (1) Int Cl.: F01D 11/04 (06.01) (21) Anmeldenummer: 131669.8 (22) Anmeldetag:
Erstellen von x-y-diagrammen in OpenOffice.calc
 Erstellen von x-y-diagrammen in OpenOffice.calc In dieser kleinen Anleitung geht es nur darum, aus einer bestehenden Tabelle ein x-y-diagramm zu erzeugen. D.h. es müssen in der Tabelle mindestens zwei
Erstellen von x-y-diagrammen in OpenOffice.calc In dieser kleinen Anleitung geht es nur darum, aus einer bestehenden Tabelle ein x-y-diagramm zu erzeugen. D.h. es müssen in der Tabelle mindestens zwei
LU-Zerlegung. Zusätze zum Gelben Rechenbuch. Peter Furlan. Verlag Martina Furlan. Inhaltsverzeichnis. 1 Definitionen.
 Zusätze zum Gelben Rechenbuch LU-Zerlegung Peter Furlan Verlag Martina Furlan Inhaltsverzeichnis Definitionen 2 (Allgemeine) LU-Zerlegung 2 3 Vereinfachte LU-Zerlegung 3 4 Lösung eines linearen Gleichungssystems
Zusätze zum Gelben Rechenbuch LU-Zerlegung Peter Furlan Verlag Martina Furlan Inhaltsverzeichnis Definitionen 2 (Allgemeine) LU-Zerlegung 2 3 Vereinfachte LU-Zerlegung 3 4 Lösung eines linearen Gleichungssystems
*EP001201735A1* EP 1 201 735 A1 (19) (11) EP 1 201 735 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 02.05.2002 Patentblatt 2002/18
 (11) EP 1 201 735 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 02.05.2002 Patentblatt 2002/18") (19) Europäisches Patentamt European Patent Office Office européen des brevets *EP00120173A1* (11) EP 1 201 73 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 02.0.2002 Patentblatt 2002/18
(19) Europäisches Patentamt European Patent Office Office européen des brevets *EP00120173A1* (11) EP 1 201 73 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 02.0.2002 Patentblatt 2002/18
Mean Time Between Failures (MTBF)
") Mean Time Between Failures (MTBF) Hintergrundinformation zur MTBF Was steht hier? Die Mean Time Between Failure (MTBF) ist ein statistischer Mittelwert für den störungsfreien Betrieb eines elektronischen
Mean Time Between Failures (MTBF) Hintergrundinformation zur MTBF Was steht hier? Die Mean Time Between Failure (MTBF) ist ein statistischer Mittelwert für den störungsfreien Betrieb eines elektronischen
www.mathe-aufgaben.com
 Abiturprüfung Mathematik Baden-Württemberg (ohne CAS) Pflichtteil Aufgaben Aufgabe : ( VP) Bilden Sie die erste Ableitung der Funktion f mit sin() f() =. Aufgabe : ( VP) Berechnen Sie das Integral ( )
Abiturprüfung Mathematik Baden-Württemberg (ohne CAS) Pflichtteil Aufgaben Aufgabe : ( VP) Bilden Sie die erste Ableitung der Funktion f mit sin() f() =. Aufgabe : ( VP) Berechnen Sie das Integral ( )
Modellbildungssysteme: Pädagogische und didaktische Ziele
 Modellbildungssysteme: Pädagogische und didaktische Ziele Was hat Modellbildung mit der Schule zu tun? Der Bildungsplan 1994 formuliert: "Die schnelle Zunahme des Wissens, die hohe Differenzierung und
Modellbildungssysteme: Pädagogische und didaktische Ziele Was hat Modellbildung mit der Schule zu tun? Der Bildungsplan 1994 formuliert: "Die schnelle Zunahme des Wissens, die hohe Differenzierung und
Rekursionen. Georg Anegg 25. November 2009. Methoden und Techniken an Beispielen erklärt
 Methoden und Techniken an Beispielen erklärt Georg Anegg 5. November 009 Beispiel. Die Folge {a n } sei wie folgt definiert (a, d, q R, q ): a 0 a, a n+ a n q + d (n 0) Man bestimme eine explizite Darstellung
Methoden und Techniken an Beispielen erklärt Georg Anegg 5. November 009 Beispiel. Die Folge {a n } sei wie folgt definiert (a, d, q R, q ): a 0 a, a n+ a n q + d (n 0) Man bestimme eine explizite Darstellung
EP 1 768 449 A1 (19) (11) EP 1 768 449 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 28.03.2007 Patentblatt 2007/13
 (11) EP 1 768 449 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (43) Veröffentlichungstag: 28.03.2007 Patentblatt 2007/13") (19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 768 449 A1 (43) Veröffentlichungstag: 28.03.2007 Patentblatt 2007/13 (51) Int Cl.: H04R 25/00 (2006.01) (21) Anmeldenummer: 06120912.8 (22) Anmeldetag: 19.09.2006
(19) (12) EUROPÄISCHE PATENTANMELDUNG (11) EP 1 768 449 A1 (43) Veröffentlichungstag: 28.03.2007 Patentblatt 2007/13 (51) Int Cl.: H04R 25/00 (2006.01) (21) Anmeldenummer: 06120912.8 (22) Anmeldetag: 19.09.2006
V 2 B, C, D Drinks. Möglicher Lösungsweg a) Gleichungssystem: 300x + 400 y = 520 300x + 500y = 597,5 2x3 Matrix: Energydrink 0,7 Mineralwasser 0,775,
 Gleichungssystem: 300x + 400 y = 520 300x + 500y = 597,5 2x3 Matrix: Energydrink 0,7 Mineralwasser 0,775,") Aufgabenpool für angewandte Mathematik / 1. Jahrgang V B, C, D Drinks Ein gastronomischer Betrieb kauft 300 Dosen Energydrinks (0,3 l) und 400 Liter Flaschen Mineralwasser und zahlt dafür 50, Euro. Einen
Aufgabenpool für angewandte Mathematik / 1. Jahrgang V B, C, D Drinks Ein gastronomischer Betrieb kauft 300 Dosen Energydrinks (0,3 l) und 400 Liter Flaschen Mineralwasser und zahlt dafür 50, Euro. Einen
Im Jahr t = 0 hat eine Stadt 10.000 Einwohner. Nach 15 Jahren hat sich die Einwohnerzahl verdoppelt. z(t) = at + b
 = at + b") Aufgabe 1: Im Jahr t = 0 hat eine Stadt 10.000 Einwohner. Nach 15 Jahren hat sich die Einwohnerzahl verdoppelt. (a) Nehmen Sie lineares Wachstum gemäß z(t) = at + b an, wobei z die Einwohnerzahl ist und
Aufgabe 1: Im Jahr t = 0 hat eine Stadt 10.000 Einwohner. Nach 15 Jahren hat sich die Einwohnerzahl verdoppelt. (a) Nehmen Sie lineares Wachstum gemäß z(t) = at + b an, wobei z die Einwohnerzahl ist und
Rekursionen (Teschl/Teschl 8.1-8.2)
") Rekursionen (Teschl/Teschl 8.1-8.2) Eine Rekursion kter Ordnung für k N ist eine Folge x 1, x 2, x 3,... deniert durch eine Rekursionsvorschrift x n = f n (x n 1,..., x n k ) für n > k, d. h. jedes Folgenglied
Rekursionen (Teschl/Teschl 8.1-8.2) Eine Rekursion kter Ordnung für k N ist eine Folge x 1, x 2, x 3,... deniert durch eine Rekursionsvorschrift x n = f n (x n 1,..., x n k ) für n > k, d. h. jedes Folgenglied
Daten sammeln, darstellen, auswerten
 Vertiefen 1 Daten sammeln, darstellen, auswerten zu Aufgabe 1 Schulbuch, Seite 22 1 Haustiere zählen In der Tabelle rechts stehen die Haustiere der Kinder aus der Klasse 5b. a) Wie oft wurden die Haustiere
Vertiefen 1 Daten sammeln, darstellen, auswerten zu Aufgabe 1 Schulbuch, Seite 22 1 Haustiere zählen In der Tabelle rechts stehen die Haustiere der Kinder aus der Klasse 5b. a) Wie oft wurden die Haustiere
Die Größe von Flächen vergleichen
 Vertiefen 1 Die Größe von Flächen vergleichen zu Aufgabe 1 Schulbuch, Seite 182 1 Wer hat am meisten Platz? Ordne die Figuren nach ihrem Flächeninhalt. Begründe deine Reihenfolge. 1 2 3 4 zu Aufgabe 2
Vertiefen 1 Die Größe von Flächen vergleichen zu Aufgabe 1 Schulbuch, Seite 182 1 Wer hat am meisten Platz? Ordne die Figuren nach ihrem Flächeninhalt. Begründe deine Reihenfolge. 1 2 3 4 zu Aufgabe 2
Info zum Zusammenhang von Auflösung und Genauigkeit
 Da es oft Nachfragen und Verständnisprobleme mit den oben genannten Begriffen gibt, möchten wir hier versuchen etwas Licht ins Dunkel zu bringen. Nehmen wir mal an, Sie haben ein Stück Wasserrohr mit der
Da es oft Nachfragen und Verständnisprobleme mit den oben genannten Begriffen gibt, möchten wir hier versuchen etwas Licht ins Dunkel zu bringen. Nehmen wir mal an, Sie haben ein Stück Wasserrohr mit der
Anlage eines neuen Geschäftsjahres in der Office Line
 Leitfaden Anlage eines neuen Geschäftsjahres in der Office Line Version: 2016 Stand: 04.11.2015 Nelkenweg 6a 86641 Rain am Lech Stand: 04.11.2015 Inhalt 1 Zielgruppe... 3 2 Zeitpunkt... 3 3 Fragen... 3
Leitfaden Anlage eines neuen Geschäftsjahres in der Office Line Version: 2016 Stand: 04.11.2015 Nelkenweg 6a 86641 Rain am Lech Stand: 04.11.2015 Inhalt 1 Zielgruppe... 3 2 Zeitpunkt... 3 3 Fragen... 3
SCHRITT 1: Öffnen des Bildes und Auswahl der Option»Drucken«im Menü»Datei«...2. SCHRITT 2: Angeben des Papierformat im Dialog»Drucklayout«...
 Drucken - Druckformat Frage Wie passt man Bilder beim Drucken an bestimmte Papierformate an? Antwort Das Drucken von Bildern ist mit der Druckfunktion von Capture NX sehr einfach. Hier erklären wir, wie
Drucken - Druckformat Frage Wie passt man Bilder beim Drucken an bestimmte Papierformate an? Antwort Das Drucken von Bildern ist mit der Druckfunktion von Capture NX sehr einfach. Hier erklären wir, wie
Kapiteltests zum Leitprogramm Binäre Suchbäume
 Kapiteltests zum Leitprogramm Binäre Suchbäume Björn Steffen Timur Erdag überarbeitet von Christina Class Binäre Suchbäume Kapiteltests für das ETH-Leitprogramm Adressaten und Institutionen Das Leitprogramm
Kapiteltests zum Leitprogramm Binäre Suchbäume Björn Steffen Timur Erdag überarbeitet von Christina Class Binäre Suchbäume Kapiteltests für das ETH-Leitprogramm Adressaten und Institutionen Das Leitprogramm
Primzahlen und RSA-Verschlüsselung
 Primzahlen und RSA-Verschlüsselung Michael Fütterer und Jonathan Zachhuber 1 Einiges zu Primzahlen Ein paar Definitionen: Wir bezeichnen mit Z die Menge der positiven und negativen ganzen Zahlen, also
Primzahlen und RSA-Verschlüsselung Michael Fütterer und Jonathan Zachhuber 1 Einiges zu Primzahlen Ein paar Definitionen: Wir bezeichnen mit Z die Menge der positiven und negativen ganzen Zahlen, also
Nullserie zur Prüfungsvorbereitung
 Nullserie zur Prüfungsvorbereitung Die folgenden Hilfsmittel und Bedingungen sind an der Prüfung zu beachten. Erlaubte Hilfsmittel Beliebiger Taschenrechner (Der Einsatz von Lösungs- und Hilfsprogrammen
Nullserie zur Prüfungsvorbereitung Die folgenden Hilfsmittel und Bedingungen sind an der Prüfung zu beachten. Erlaubte Hilfsmittel Beliebiger Taschenrechner (Der Einsatz von Lösungs- und Hilfsprogrammen
SS 2014 Torsten Schreiber
 SS 2014 Torsten Schreiber 204 Diese Lücken sollten nicht auch bei Ihnen vorhanden sein: Bei der Rentenrechnung geht es um aus einem angesparten Kapital bzw. um um das Kapital aufzubauen, die innerhalb
SS 2014 Torsten Schreiber 204 Diese Lücken sollten nicht auch bei Ihnen vorhanden sein: Bei der Rentenrechnung geht es um aus einem angesparten Kapital bzw. um um das Kapital aufzubauen, die innerhalb
Dokumentation zum Projekt Multimediale Lehre Fluidmechanik an der Technischen Universität Graz
 Dokumentation zum Projekt Multimediale Lehre Fluidmechanik an der Technischen Universität Graz Andreas Aigner email: andreasa@sbox.tu-graz.ac.at. Januar 00 Inhaltsverzeichnis Theorie. Stromfunktion...........................
Dokumentation zum Projekt Multimediale Lehre Fluidmechanik an der Technischen Universität Graz Andreas Aigner email: andreasa@sbox.tu-graz.ac.at. Januar 00 Inhaltsverzeichnis Theorie. Stromfunktion...........................
Tipp III: Leiten Sie eine immer direkt anwendbare Formel her zur Berechnung der sogenannten "bedingten Wahrscheinlichkeit".
 Mathematik- Unterrichts- Einheiten- Datei e. V. Klasse 9 12 04/2015 Diabetes-Test Infos: www.mued.de Blutspenden werden auf Diabetes untersucht, das mit 8 % in der Bevölkerung verbreitet ist. Dabei werden
Mathematik- Unterrichts- Einheiten- Datei e. V. Klasse 9 12 04/2015 Diabetes-Test Infos: www.mued.de Blutspenden werden auf Diabetes untersucht, das mit 8 % in der Bevölkerung verbreitet ist. Dabei werden
Stellen Sie bitte den Cursor in die Spalte B2 und rufen die Funktion Sverweis auf. Es öffnet sich folgendes Dialogfenster
 Es gibt in Excel unter anderem die so genannten Suchfunktionen / Matrixfunktionen Damit können Sie Werte innerhalb eines bestimmten Bereichs suchen. Als Beispiel möchte ich die Funktion Sverweis zeigen.
Es gibt in Excel unter anderem die so genannten Suchfunktionen / Matrixfunktionen Damit können Sie Werte innerhalb eines bestimmten Bereichs suchen. Als Beispiel möchte ich die Funktion Sverweis zeigen.
Abamsoft Finos im Zusammenspiel mit shop to date von DATA BECKER
 Abamsoft Finos im Zusammenspiel mit shop to date von DATA BECKER Abamsoft Finos in Verbindung mit der Webshopanbindung wurde speziell auf die Shop-Software shop to date von DATA BECKER abgestimmt. Mit
Abamsoft Finos im Zusammenspiel mit shop to date von DATA BECKER Abamsoft Finos in Verbindung mit der Webshopanbindung wurde speziell auf die Shop-Software shop to date von DATA BECKER abgestimmt. Mit
Erstellen einer PostScript-Datei unter Windows XP
 Erstellen einer PostScript-Datei unter Windows XP Sie möchten uns Ihre Druckvorlage als PostScript-Datei einreichen. Um Fehler in der Herstellung von vorneherein auszuschließen, möchten wir Sie bitten,
Erstellen einer PostScript-Datei unter Windows XP Sie möchten uns Ihre Druckvorlage als PostScript-Datei einreichen. Um Fehler in der Herstellung von vorneherein auszuschließen, möchten wir Sie bitten,
TEPZZ 9_5469A_T EP 2 915 469 A1 (19) (11) EP 2 915 469 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (51) Int Cl.: A47J 42/50 (2006.01)
 (11) EP 2 915 469 A1 (12) EUROPÄISCHE PATENTANMELDUNG. (51) Int Cl.: A47J 42/50 (2006.01)") (19) TEPZZ 9_469A_T (11) EP 2 91 469 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 09.09.1 Patentblatt 1/37 (1) Int Cl.: A47J 42/0 (06.01) (21) Anmeldenummer: 116042.2 (22) Anmeldetag:
(19) TEPZZ 9_469A_T (11) EP 2 91 469 A1 (12) EUROPÄISCHE PATENTANMELDUNG (43) Veröffentlichungstag: 09.09.1 Patentblatt 1/37 (1) Int Cl.: A47J 42/0 (06.01) (21) Anmeldenummer: 116042.2 (22) Anmeldetag:
Dossier: Rechnungen und Lieferscheine in Word
 www.sekretaerinnen-service.de Dossier: Rechnungen und Lieferscheine in Word Es muss nicht immer Excel sein Wenn Sie eine Vorlage für eine Rechnung oder einen Lieferschein erstellen möchten, brauchen Sie
www.sekretaerinnen-service.de Dossier: Rechnungen und Lieferscheine in Word Es muss nicht immer Excel sein Wenn Sie eine Vorlage für eine Rechnung oder einen Lieferschein erstellen möchten, brauchen Sie
13. Lineare DGL höherer Ordnung. Eine DGL heißt von n-ter Ordnung, wenn Ableitungen y, y, y,... bis zur n-ten Ableitung y (n) darin vorkommen.
 darin vorkommen.") 13. Lineare DGL höherer Ordnung. Eine DGL heißt von n-ter Ordnung, wenn Ableitungen y, y, y,... bis zur n-ten Ableitung y (n) darin vorkommen. Sie heißt linear, wenn sie die Form y (n) + a n 1 y (n 1)
13. Lineare DGL höherer Ordnung. Eine DGL heißt von n-ter Ordnung, wenn Ableitungen y, y, y,... bis zur n-ten Ableitung y (n) darin vorkommen. Sie heißt linear, wenn sie die Form y (n) + a n 1 y (n 1)
HIER GEHT ES UM IHR GUTES GELD ZINSRECHNUNG IM UNTERNEHMEN
 HIER GEHT ES UM IHR GUTES GELD ZINSRECHNUNG IM UNTERNEHMEN Zinsen haben im täglichen Geschäftsleben große Bedeutung und somit auch die eigentliche Zinsrechnung, z.b: - Wenn Sie Ihre Rechnungen zu spät
HIER GEHT ES UM IHR GUTES GELD ZINSRECHNUNG IM UNTERNEHMEN Zinsen haben im täglichen Geschäftsleben große Bedeutung und somit auch die eigentliche Zinsrechnung, z.b: - Wenn Sie Ihre Rechnungen zu spät
Einführung in. Logische Schaltungen
 Einführung in Logische Schaltungen 1/7 Inhaltsverzeichnis 1. Einführung 1. Was sind logische Schaltungen 2. Grundlegende Elemente 3. Weitere Elemente 4. Beispiel einer logischen Schaltung 2. Notation von
Einführung in Logische Schaltungen 1/7 Inhaltsverzeichnis 1. Einführung 1. Was sind logische Schaltungen 2. Grundlegende Elemente 3. Weitere Elemente 4. Beispiel einer logischen Schaltung 2. Notation von
Auswirkungen der Güterstände auf das Erbrecht eingetragener Lebenspartner
 Auswirkungen der Güterstände auf das Erbrecht eingetragener Lebenspartner Seit dem 01. Januar 2005 ist das eheliche Güterrecht des Bürgerlichen Gesetzbuchs (BGB) auch auf eingetragene Lebenspartnerschaften
Auswirkungen der Güterstände auf das Erbrecht eingetragener Lebenspartner Seit dem 01. Januar 2005 ist das eheliche Güterrecht des Bürgerlichen Gesetzbuchs (BGB) auch auf eingetragene Lebenspartnerschaften