Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik graphische Programmierung
|
|
|
- Jürgen Sommer
- vor 5 Jahren
- Abrufe
Transkript

1 Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik graphische Programmierung Ute Ihme Hochschule Mannheim Ute Ihme

2 DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS Roboter wird gebaut mit programmierbarem LEGO Stein bis zu 4 Motoren oder Lampen bis zu 4 Sensoren LEGO TECHNIC Teile Erstellung eines Steuerprogramms am Computer Übertragen des Programms auf den Roboter Testen des Programms April

3 DAS LEGO MINDSTORMS System Motoren Quelle: Lego Motoren werden an die Anschlüsse A, B, C und D angeschlossen. Servomotor Verfügt über integrierten Rotationssensor misst Geschwindigkeit und Abstand Leitet Ergebnisse an NXT Stein weiter Motor kann auf einen Grad genau gesteuert werden Kombinationen mehrerer Motoren möglich arbeiten ggf. mit gleicher Geschwindigkeit April


4 DAS LEGO MINDSTORMS System Standardsensoren Berührungssensor Tastsenor Ultraschallsensor Gyrosensor Farbsensor Sensoren werden an die Anschlüsse 1, 2, 3 und 4 angeschlossen. April
5 DAS LEGO MINDSTORMS System Berührungssensor / Tastsensor Abfrage, ob Sensor gedrückt Werte des Sensors 0: Sensor nicht gedrückt 1: Sensor gedrückt April
6 DAS LEGO MINDSTORMS System Ultraschallsensor Sensor sendet Ultraschall aus Schall wird von Hindernis reflektiert Reflektierter Schall wird vom Empfänger registriert Aus Laufzeit des Schalls kann auf die Entfernung geschlussfolgert werden Messbereich: 3 bis 250 cm Messgenauigkeit: +/- 1 cm April
7 DAS LEGO MINDSTORMS System Colorsensor Verfügt über mehrere Moden, z. B. Bestimmung des Farbwertes (ColorID) Bestimmung der reflektierten Helligkeit Zur Ausleuchtung kann eine LED eingeschaltet werden April
8 DAS LEGO MINDSTORMS System Colorsensor ColorID Mode Bestimmung der Farbe Jede Farbe hat einen Wert Werte für EV3 Colorsensor Wert Farbe -1 keine 0 Rot 1 Grün 2 Blau 3 Gelb 4 Magenta 5 Orange 6 Weiß 7 Schwarz 8 Pink 9 Grau 10 Hellgrau 11 Dunkelgrau 12 Zyan 13 Braun April
9 DAS LEGO MINDSTORMS System Colorsensor ambient Light Mode Messung der Helligkeit mittels Fotodiode Helle Fläche reflektiert mehr Licht als dunkle Messbereich: 0: dunkel 100: hell Zur Ausleuchtung kann eine LED eingeschaltet werden April

10 Die graphische Programmieroberfläche für EV3 Erste Schritte Starten von Lego Mindstorms Education EV3 Startbildschirm April
11 Die graphische Programmieroberfläche für EV3 Erste Schritte Neues Projekt hinzufügen April
12 Die graphische Programmieroberfläche für EV3 Erste Schritte Projektname kann mit Speichern unter geändert werden Programmname durch Klicken und Editieren im Reiter Hinzufügen von weiteren Programmen durch Klicken auf das Plus April
13 Die graphische Programmieroberfläche für EV3 Erste Schritte Startelement eines Programmes Dieses Fenster schließen Auswahl der Programmierelemente Dialogfeld für EV3 April
14 Hinweise zur Bearbeitung der Praktikumsaufgaben Jede Aufgabe des Spielfeldes ist eine eigenständige Aufgabe. D. h. jede Aufgabe kann einzeln gelöst werden und muss nicht mit anderen Aufgaben kombiniert werden. Beim Programmieren wird am besten den EV3 immer über USB Kabel mit Rechner verbinden Ports für Motoren und Sensoren werden automatisch gesetzt April

15 Graphische Programmierung EV3 Wichtige Elemente Grüne Palette Steuerung zweier Motoren Bildschirmanzeige April
 April")
16 Graphische Programmierung EV3 Wichtige Elemente Orange Palette Warte-Block Schleife Schalter (if-else-block) April

17 Graphische Programmierung EV3 Wichtige Elemente Gelbe Palette Blöcke werden benötigt zur Abfrage von Sensorwerten April

18 Graphische Programmierung EV3 Wichtige Elemente Rote Palette Variablen Zufallszahl April

19 Graphische Programmierung EV3 EV3 Dialogfeld Systeminformationen Herunterladen des Programms auf den EV3- Stein Motoren und Sensorenbelegung April


20 Graphische Programmierung EV3 Erste Schritte: Bildschirmanzeigen Warte-Block April
21 Aufgabe 1: Fahrt zum Flughafen Start: P1 Ende: Flughafenhalle Der Roboter soll aus P1 zum Parkfläche am Flughafen fahren. Ziel: Lernen der Steuerung des Roboters. - Geradeausfahren - Kurvenfahren April
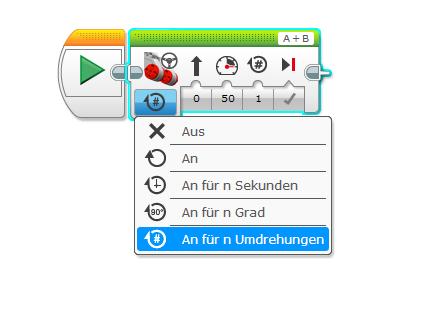
22 Motorsteuerung April
23 Aufgabe 1: Fahrt zum Flughafen Start: P1 Ende: Flughafenhalle Der Roboter soll aus P1 zum Parkfläche am Flughafen fahren. Ziel: Lernen der Steuerung des Roboters. - Geradeausfahren - Kurvenfahren Aufgabe 1 gelöst? Aufgabe 1 unterschrieben? Aufgabe 1 Aufgabe 2 April

24 Aufgabe 2: Fahrt zum Krankenhaus auf verschiedenen Wegen Start: P2 Ende: Parkfläche Krankenhaus Der Roboter soll von P2 aus über 2 verschiedene Weg zum Krankenhaus fahren. Die Auswahl des Weges ist abhängig vom gedrückten Knopf des EV3 Steines. Oben Knopf Oben: über Cafe alle anderen: über Hotel April

25 Button-Abfrage Schalter April
26 Aufgabe 2: Fahrt zum Krankenhaus auf verschiedenen Wegen Start: P2 Ende: Parkfläche Krankenhaus Der Roboter soll von P2 aus über 2 verschiedene Weg zum Krankenhaus fahren. Die Auswahl des Weges ist abhängig vom gedrückten Knopf des EV3 Steines. Knopf Oben: über Cafe alle anderen: über Hotel Aufgabe 2 gelöst? Aufgabe 2 unterschrieben? Aufgabe 2 Aufgabe 3 April
27 Aufgabe 3: Beförderung von Fahrgästen zwischen Flughafen und Hotel Start und Ende: Parkfläche Flughafen Der Roboter soll als Shuttlebus Gäste zwischen Flughafen und Hotel hin und zurück befördern. An jedem Ort warten 3 Gäste. Es soll jeweils ein Gast transportiert werden. Der Roboter startet per Knopfdruck, wenn der Gast eingestiegen ist. Der Roboter fährt die Strecke vom Flughafen zum Hotel vorwärts. Lässt den Gast ein- und aussteigen und fährt nach Knopfdruck die gleiche Strecke rückwärts zurück. (Realisierung mit einer Schleife) Auf den Parkflächen darf der Roboter neu ausgerichtet werden! April

28 Die for-schleife April
29 Aufgabe 3: Beförderung von Fahrgästen zwischen Flughafen und Hotel Start und Ende: Parkfläche Flughafen Der Roboter soll als Shuttlebus Gäste zwischen Flughafen und Hotel hin und zurück befördern. An jedem Ort warten 3 Gäste. Es soll jeweils ein Gast transportiert werden. Der Roboter startet per Knopfdruck, wenn der Gast eingestiegen ist. Der Roboter fährt die Strecke vom Flughafen zum Hotel vorwärts. Lässt den Gast ein- und aussteigen und fährt nach Knopfdruck die gleiche Strecke rückwärts zurück. Auf den Parkflächen darf der Roboter neu ausgerichtet werden! Aufgabe 3 gelöst? Aufgabe 3 unterschrieben? Aufgabe 3 Aufgabe 4 April
30 Aufgabe 4: Einparken mittels Tastsensor Start: Parkfläche vor Hotel Ende: P3 Der Roboter soll rückwärts einparken. Er soll anhalten, wenn der Tastsensor die Bande berührt. (Realisierung ohne Warte-Block; nur mit Schalter und Schleife) April

31 Berührungssensor / Tastsensor Abfrage, ob Sensor gedrückt Werte des Sensors 0: Sensor nicht gedrückt 1: Sensor gedrückt April

32 Abfrage Berührungssensor Analog können alle anderen Sensoren abgefragt werden. April
33 Aufgabe 4: Einparken mittels Tastsensor Start: Parkfläche vor Hotel Ende: P3 Der Roboter soll rückwärts einparken. Er soll anhalten, wenn der Tastsensor die Bande berührt. Aufgabe 4 gelöst? Aufgabe 4 unterschrieben? Aufgabe 4 Aufgabe 5 April
34 Aufgabe 5: Einparken mittels Ultraschallsensor Start: Parkfläche Schule Ende: P1 Garage Der Roboter holt einen Schüler ab. Dabei parkt er selbstständig in die Garage ein. Er soll stehenbleiben, wenn der Abstand zur Wand kleiner als 5 cm ist. Dabei soll der Roboter die aktuelle Entfernung anzeigen. April


35 Ultraschallsensor Sensor sendet Ultraschall aus Schall wird von Hindernis reflektiert Reflektierter Schall wird vom Empfänger registriert Aus Laufzeit des Schalls kann auf die Entfernung geschlussfolgert werden Messbereich: 3 bis 250 cm Messgenauigkeit: +/- 1 cm April


36 Abfrage Sensorwerte Per Leitung übertragen auswählen Datenleitung ziehen April
37 Aufgabe 5: Einparken mittels Ultraschallsensor Start: Parkfläche Schule Ende: P1 Garage Der Roboter holt einen Schüler ab. Dabei parkt er selbstständig in die Garage ein. Er soll stehenbleiben, wenn der Abstand zur Wand kleiner als 5 cm ist. Dabei soll der Roboter die aktuelle Entfernung anzeigen. Aufgabe 5 gelöst? Aufgabe 5 unterschrieben? Aufgabe 5 Aufgabe 6 April
38 Aufgabe 6: Ausflugsziel Start: P4 Ende: entsprechendes Farbfeld Der Roboter soll in Abhängigkeit von ermittelten Farbe am entsprechenden Ausflugsziel anhalten. Das Farbfeld wird über eine Zufallszahl ermittelt (siehe Folie73). Die Zufallszahl soll angezeigt werden. 0 Gelb (Farb-ID: 3) 1 Blau (Farb-ID: 2) 2 Schwarz (Farb-ID: 7) 3 Rot (Farb-ID: 0) April
39 Colorsensor ColorID Mode Bestimmung der Farbe Jede Farbe hat einen Wert Werte für EV3 Colorsensor Wert Farbe -1 keine 0 Rot 1 Grün 2 Blau 3 Gelb 4 Magenta 5 Orange 6 Weiß 7 Schwarz 8 Pink 9 Grau 10 Hellgrau 11 Dunkelgrau 12 Zyan 13 Braun April

40 Zufallszahl erzeugen und Arbeit mit Variablen April
41 Aufgabe 6: Ausflugsziel Start: P4 Ende: entsprechendes Farbfeld Der Roboter soll in Abhängigkeit von ermittelten Farbe am entsprechenden Ausflugsziel anhalten. Das Farbfeld wird über eine Zufallszahl ermittelt (siehe Folie 73). Die Zufallszahl soll angezeigt werden. 0 Gelb (Farb-ID: 3) 1 Blau (Farb-ID: 2) 2 Schwarz (Farb-ID: 7) 3 Rot (Farb-ID: 0) Aufgabe 6 gelöst? Aufgabe 6 unterschrieben? Aufgabe 6 Aufgabe 7 April
42 Aufgabe 7: Folge dem Weg zum Leuchtturm Aufgabe 7 gelöst? Start: P3 Ende: Gelbes Feld beim Leuchtturm Der Roboter soll der schwarzen Linie zum Leuchtturm folgen. Der Roboter soll anhalten, sobald das Endfeld (gelb) erreicht ist. Aufgabe 7 unterschrieben? Aufgabe 7 Ende April
Fakultät für Informatik, Institut für Robotik. Legorobotik Graphische Programmierung Vorstellung des EV3 Systems und der Programmierumgebung.
 Fakultät für Informatik, Institut für Robotik Legorobotik Graphische Programmierung Vorstellung des EV3 Systems und der Programmierumgebung Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System
Fakultät für Informatik, Institut für Robotik Legorobotik Graphische Programmierung Vorstellung des EV3 Systems und der Programmierumgebung Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System
Fakultät für Informatik, Institut für Robotik Laborpraktikum I - Medizinarena Legorobotik in C EV3
 Fakultät für Informatik, Institut für Robotik Laborpraktikum I - Medizinarena Legorobotik in C EV3 Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS
Fakultät für Informatik, Institut für Robotik Laborpraktikum I - Medizinarena Legorobotik in C EV3 Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS
Fakultät für Informatik, Institut für Robotik Laborpraktikum Legorobotik in C EV3
 Fakultät für Informatik, Institut für Robotik Laborpraktikum Legorobotik in C EV3 Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS Roboter wird
Fakultät für Informatik, Institut für Robotik Laborpraktikum Legorobotik in C EV3 Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS Roboter wird
Fakultät für Informatik, Institut für Robotik EV3 - Laborpraktikum II Programmierung mit JAVA
 Fakultät für Informatik, Institut für Robotik EV3 - Laborpraktikum II Programmierung mit JAVA Ute Ihme Hochschule Mannheim Ute Ihme Wiederholung von Laborpraktikum I Ausführliche Informationen Folien zum
Fakultät für Informatik, Institut für Robotik EV3 - Laborpraktikum II Programmierung mit JAVA Ute Ihme Hochschule Mannheim Ute Ihme Wiederholung von Laborpraktikum I Ausführliche Informationen Folien zum
Fakultät für Informatik, Institut für Robotik EV3 - Laborpraktikum I Einführung in die Programmierung mit JAVA
 Fakultät für Informatik, Institut für Robotik EV3 - Laborpraktikum I Einführung in die Programmierung mit JAVA Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von
Fakultät für Informatik, Institut für Robotik EV3 - Laborpraktikum I Einführung in die Programmierung mit JAVA Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von
Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik in C EV3
 Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik in C EV3 Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS Roboter wird
Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik in C EV3 Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS Roboter wird
Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik in JAVA EV3
 Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik in JAVA EV3 Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Die Bausysteme source: Lego via Cnet 1999: RCX 2007:
Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik in JAVA EV3 Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Die Bausysteme source: Lego via Cnet 1999: RCX 2007:
Fakultät für Informatik, Institut für Robotik Laborpraktikum I - Medizinarena Legorobotik in JAVA EV3
 Fakultät für Informatik, Institut für Robotik Laborpraktikum I - Medizinarena Legorobotik in JAVA EV3 Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS
Fakultät für Informatik, Institut für Robotik Laborpraktikum I - Medizinarena Legorobotik in JAVA EV3 Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Das EV3 System Prinzip von LEGO MINDSTORMS
Erste Schritte zum Start findest du hier: https://education.lego.com/de-de/weiterfuehrendeschulen/entdecken/informatik
 Robotik mit https://education.lego.com/de-de/downloads/mindstorms-ev3 Erste Schritte zum Start findest du hier: https://education.lego.com/de-de/weiterfuehrendeschulen/entdecken/informatik Baue zuerst
Robotik mit https://education.lego.com/de-de/downloads/mindstorms-ev3 Erste Schritte zum Start findest du hier: https://education.lego.com/de-de/weiterfuehrendeschulen/entdecken/informatik Baue zuerst
Wie können See how wir far Enchanting away something mitteilen, is. dass am NXT der Lichtsensor an Port 3 angeschlossen ist?
 Wie können See how wir far Enchanting away something mitteilen, is. dass am NXT der Lichtsensor an Port 3 angeschlossen ist? 1. Klicke auf das Fühlen - Menü 2. Klicke auf Sensoren festlegen 3. Suche auf
Wie können See how wir far Enchanting away something mitteilen, is. dass am NXT der Lichtsensor an Port 3 angeschlossen ist? 1. Klicke auf das Fühlen - Menü 2. Klicke auf Sensoren festlegen 3. Suche auf
Aufgabe Im Quadrat fahren
 Aufgabensammlung LEGO MINDSTORMS NXT Version 4.6.13 Aufgabe Im Quadrat fahren Ziel Sie programmieren den Lego Roboter mit dem Programm LEGO MINDSTORMS Sie kennen Bedingungen und Schleifen Zeitaufwand 20
Aufgabensammlung LEGO MINDSTORMS NXT Version 4.6.13 Aufgabe Im Quadrat fahren Ziel Sie programmieren den Lego Roboter mit dem Programm LEGO MINDSTORMS Sie kennen Bedingungen und Schleifen Zeitaufwand 20
Der Lego NXT Roboter. Hochschule Mannheim Fakultät für Informatik
 Der Lego NXT Roboter Hochschule Mannheim Fakultät für Informatik Der NXT-Stein Technische Daten 32-bit ARM7 Microcontroller 256 Kbytes FLASH, 64 Kbytes RAM 8-bit AVR microcontroller 4 Kbytes FLASH, 512
Der Lego NXT Roboter Hochschule Mannheim Fakultät für Informatik Der NXT-Stein Technische Daten 32-bit ARM7 Microcontroller 256 Kbytes FLASH, 64 Kbytes RAM 8-bit AVR microcontroller 4 Kbytes FLASH, 512
Programmübersicht Software EV3
 Programmübersicht Software EV3 8. 4. 2. 1. 5. 3. 6. 7. 1. Menüliste Reiter: Verwaltung der Projekte 2. Projekteigenschaften: Übersicht des Programms 3. Werkzeugliste: Programm kommentieren 4. Programmblöcke:
Programmübersicht Software EV3 8. 4. 2. 1. 5. 3. 6. 7. 1. Menüliste Reiter: Verwaltung der Projekte 2. Projekteigenschaften: Übersicht des Programms 3. Werkzeugliste: Programm kommentieren 4. Programmblöcke:
Postenblatt 1: Berührungssensor
 Postenblatt 1: Berührungssensor In diesem Posten lernst du den Berührungssensor kennen. - 1 x Berührungssensor Der Roboter «fühlt». Der Kontaktschalter besitzt vorne ein rotes, bewegliches Köpfchen, das
Postenblatt 1: Berührungssensor In diesem Posten lernst du den Berührungssensor kennen. - 1 x Berührungssensor Der Roboter «fühlt». Der Kontaktschalter besitzt vorne ein rotes, bewegliches Köpfchen, das
Die Denkschule 1 Reto Speerli
 Die Denkschule 1 Octopus A1 Aufgabe: Verbinde den NXT-Baustein (CPU) mit allen Motoren und den Sensoren (Berührung, Ultraschall, Licht und Geräusch). Logge dich beim Open-Roberta Lab ein und verbinde den
Die Denkschule 1 Octopus A1 Aufgabe: Verbinde den NXT-Baustein (CPU) mit allen Motoren und den Sensoren (Berührung, Ultraschall, Licht und Geräusch). Logge dich beim Open-Roberta Lab ein und verbinde den
Fakultät für Informatik, Institut für Robotik Lego Mindstorms NXT - Programmierung mit JAVA Einführung
 Fakultät für Informatik, Institut für Robotik Lego Mindstorms NXT - Programmierung mit JAVA Einführung Ute Ihme Mannheim University of Applied Sciences Ute Ihme Start der Entwicklungsumgebung Starten von
Fakultät für Informatik, Institut für Robotik Lego Mindstorms NXT - Programmierung mit JAVA Einführung Ute Ihme Mannheim University of Applied Sciences Ute Ihme Start der Entwicklungsumgebung Starten von
[ Experiment- und Datenprotokollierung. mit der EV3 Software]
![[ Experiment- und Datenprotokollierung. mit der EV3 Software]](/thumbs/39/18075793.jpg "[ Experiment- und Datenprotokollierung. mit der EV3 Software]") 2013 [ Experiment- und Datenprotokollierung mit der EV3 Software] Experiment Datenprotokollierung Es gibt zwei Möglichkeiten um die Datenaufzeichnung durchzuführen. Eine besteht darin, die Datenprotokollierung
2013 [ Experiment- und Datenprotokollierung mit der EV3 Software] Experiment Datenprotokollierung Es gibt zwei Möglichkeiten um die Datenaufzeichnung durchzuführen. Eine besteht darin, die Datenprotokollierung
Arbeitsblatt: Berührungssensor (Posten 1)
") Arbeitsblatt: Berührungssensor (Posten 1) a) Was bedeutet die Zahl, die auf dem Display angezeigt wird, wenn du den Sensor benutzt? b) Wie schnell reagiert der Sensor? c) Ändert sich der Wert, wenn der
Arbeitsblatt: Berührungssensor (Posten 1) a) Was bedeutet die Zahl, die auf dem Display angezeigt wird, wenn du den Sensor benutzt? b) Wie schnell reagiert der Sensor? c) Ändert sich der Wert, wenn der
5. NXT kann hören und Entfernungen erkennen: Test der Sensoren
 5. NXT kann hören und Entfernungen erkennen: Test der Sensoren Mit dem NXT werden vier verschiedene Sensoren mitgeliefert. In diesem Kapitel lernst du die Funktion der Sensoren kennen. Im Fenster Robot
5. NXT kann hören und Entfernungen erkennen: Test der Sensoren Mit dem NXT werden vier verschiedene Sensoren mitgeliefert. In diesem Kapitel lernst du die Funktion der Sensoren kennen. Im Fenster Robot
Robot-Design Software
 NanoGiants Academy e.v. Robot-Design Software 2017 NanoGiants Academy e.v. 1 Die Präsentation ist eine von vier über FLL Robot-Design Hardware Navigation Software Strategie http://nano-giants.net/robot-design
NanoGiants Academy e.v. Robot-Design Software 2017 NanoGiants Academy e.v. 1 Die Präsentation ist eine von vier über FLL Robot-Design Hardware Navigation Software Strategie http://nano-giants.net/robot-design
Inhaltsverzeichnis. 1 Anfang 2. 2 Erste Schritte 3. 3 Schleifen repeat while(true) Die if()-schleife... 5.
 Die if()-schleife... 5.") Inhaltsverzeichnis 1 Anfang 2 2 Erste Schritte 3 3 Schleifen 4 3.1 repeat...................................... 4 3.2 while(true).................................... 4 3.3 Die if()-schleife.................................
Inhaltsverzeichnis 1 Anfang 2 2 Erste Schritte 3 3 Schleifen 4 3.1 repeat...................................... 4 3.2 while(true).................................... 4 3.3 Die if()-schleife.................................
Technologie. NXT-Hauptmenü My Files
 My Files Im Untermenü My Files [Meine Dateien] kannst du alle Programme speichern, die du auf dem NXT erstellt oder von deinem Computer heruntergeladen hast. Unter diesem Menü befinden sich drei Ordner:
My Files Im Untermenü My Files [Meine Dateien] kannst du alle Programme speichern, die du auf dem NXT erstellt oder von deinem Computer heruntergeladen hast. Unter diesem Menü befinden sich drei Ordner:
ROBOTER. LÖSUNGEN zur Arbeit mit dem LEGO Mindstorms EV3
 ROBOTER LÖSUNGEN zur Arbeit mit dem LEGO Mindstorms EV3 Roboter Mensch Welche Roboter kennst du? Wo brauchst du zuhause Roboter? Individuelle Antworten: R2-D2 / BB6 / C-3PO (Star Wars), Wall-e, Rodney
ROBOTER LÖSUNGEN zur Arbeit mit dem LEGO Mindstorms EV3 Roboter Mensch Welche Roboter kennst du? Wo brauchst du zuhause Roboter? Individuelle Antworten: R2-D2 / BB6 / C-3PO (Star Wars), Wall-e, Rodney
Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik in JAVA
 Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik in JAVA Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Die Bausysteme source: Lego via Cnet 1999: RCX 2007:
Fakultät für Informatik, Institut für Robotik Laborpraktikum I Legorobotik in JAVA Ute Ihme Hochschule Mannheim Ute Ihme DAS LEGO MINDSTORMS System Die Bausysteme source: Lego via Cnet 1999: RCX 2007:
Daniel Braun. Roboter programmieren. mit NXT-G für LEGO MINDSTORMS NXT
 Daniel Braun Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT Kapitel 2 LEGO MINDSTORMS LEGO kennen viele aus ihrer Kindheit oder von den eigenen Kindern, LEGO, das sind bunte Spielzeugklötze, mit
Daniel Braun Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT Kapitel 2 LEGO MINDSTORMS LEGO kennen viele aus ihrer Kindheit oder von den eigenen Kindern, LEGO, das sind bunte Spielzeugklötze, mit
Technologie. Unter diesem Menü befinden sich drei Ordner:
 My Files Die Dateien werden automatisch in den zutreffenden Ordner abgelegt. Wenn du ein Programm mit Klang-Datei auf den NXT herunterlädst, wird das Programm selbst unter Software files, die Klang-Datei
My Files Die Dateien werden automatisch in den zutreffenden Ordner abgelegt. Wenn du ein Programm mit Klang-Datei auf den NXT herunterlädst, wird das Programm selbst unter Software files, die Klang-Datei
Programmieren des NXT-Roboters mit LabView 2010
 Programmieren des NXT-Roboters mit LabView 2010 Von Alwin Ebermann 1. Voraussetzungen Der Roboter hat die neueste Firmenware LabView 2010 for NXT ist schon installiert (Testversion hier) 2. Programmieren
Programmieren des NXT-Roboters mit LabView 2010 Von Alwin Ebermann 1. Voraussetzungen Der Roboter hat die neueste Firmenware LabView 2010 for NXT ist schon installiert (Testversion hier) 2. Programmieren
Welche Roboter kennst du? Wo brauchst du zuhause Roboter?
 ROBOTER LÖSUNGEN Roboter Mensch Welche Roboter kennst du? Wo brauchst du zuhause Roboter? Individuelle Antworten: R2-D2 / BB6 / C-3PO (Star Wars), Wall-e, Rodney Copperbottom (Film Robots), Optimus Prime
ROBOTER LÖSUNGEN Roboter Mensch Welche Roboter kennst du? Wo brauchst du zuhause Roboter? Individuelle Antworten: R2-D2 / BB6 / C-3PO (Star Wars), Wall-e, Rodney Copperbottom (Film Robots), Optimus Prime
Vergleich zwischen Open Roberta / NEPO und LEGO MINDSTORMS EV3 / EV3-G. - Übersicht/Fact-Sheet - Programmblöcke - Beispielprogramme
 Vergleich zwischen Open Roberta / NEPO und LEGO MINDSTORMS EV3 / EV3-G - Übersicht/Fact-Sheet - Programmblöcke - Beispielprogramme Roberta-Zentrale Fraunhofer IAIS Version 1.0 18.07.2016 Übersicht Open
Vergleich zwischen Open Roberta / NEPO und LEGO MINDSTORMS EV3 / EV3-G - Übersicht/Fact-Sheet - Programmblöcke - Beispielprogramme Roberta-Zentrale Fraunhofer IAIS Version 1.0 18.07.2016 Übersicht Open
Workshop #1 Grundlagen, Motorsteuerung, Schleifen
 Workshop #1 Grundlagen, Motorsteuerung, Schleifen Inhalte des Workshops Bauen und Kennenlernen des EV3 System Einstieg in die grafische Programmieroberfläche - Aufbau der grafischen Oberfläche - Wie kommt
Workshop #1 Grundlagen, Motorsteuerung, Schleifen Inhalte des Workshops Bauen und Kennenlernen des EV3 System Einstieg in die grafische Programmieroberfläche - Aufbau der grafischen Oberfläche - Wie kommt
Lego Roboter mit NXT-G programmieren. Hochschule Mannheim
 Lego Roboter mit NXT-G programmieren Hochschule Mannheim Die Programmiersprache NXT - G Grafische Programmiersprache zur Programmierung von Lego Robotern vom Typ NXT Das Programm Mindstorms NXT-G wird
Lego Roboter mit NXT-G programmieren Hochschule Mannheim Die Programmiersprache NXT - G Grafische Programmiersprache zur Programmierung von Lego Robotern vom Typ NXT Das Programm Mindstorms NXT-G wird
Sensoren Blöcke. Sensoren Ultraschallsensor. Neu in 2.1 ist die Einbindung verschiedener Sensoren.
 Sensoren Blöcke Neu in 2.1 ist die Einbindung verschiedener Sensoren. 1. Reihe v.l.n.r.: Berührungs-, Klang-, Licht-, Ultraschall-, NXT Tasten, Drehsensor und Timer, Nachricht 2. Reihe : Temperatur-, Farbsensor,
Sensoren Blöcke Neu in 2.1 ist die Einbindung verschiedener Sensoren. 1. Reihe v.l.n.r.: Berührungs-, Klang-, Licht-, Ultraschall-, NXT Tasten, Drehsensor und Timer, Nachricht 2. Reihe : Temperatur-, Farbsensor,
Fraunhofer IAIS. Lernen mit Robotern. Roberta Grundlagen und Experimente. Roberta-Reihe Band 1 - NXT
 Fraunhofer IAIS Lernen mit Robotern Roberta Grundlagen und Experimente Roberta-Reihe Band 1 - NXT Inhaltsverzeichnis Inhaltsverzeichnis Kapitel 1 Einführung 1 Einleitung 3 Roboter in der Bildung 4 LEGO
Fraunhofer IAIS Lernen mit Robotern Roberta Grundlagen und Experimente Roberta-Reihe Band 1 - NXT Inhaltsverzeichnis Inhaltsverzeichnis Kapitel 1 Einführung 1 Einleitung 3 Roboter in der Bildung 4 LEGO
Die Einführung von mehreren "Start Bausteinen", um das Programm zu starten, realisiert leicht die parallele Programmverarbeitung (Parallele Tasks).
.") Programmierung Allgemein Anfänger und Fortgeschrittene können die Programmierfunktion in der LEGO MINDSTORMS Education EV3 Software gut nutzen, weil sie vor allem grafisch ist. Mit Blick auf das Programmieren
Programmierung Allgemein Anfänger und Fortgeschrittene können die Programmierfunktion in der LEGO MINDSTORMS Education EV3 Software gut nutzen, weil sie vor allem grafisch ist. Mit Blick auf das Programmieren
Softwarepraktikum Teamrobotik SS 2007
 Lego Mindstorms Softwarepraktikum Teamrobotik SS 2007 Thema: - Programmierung von Steuerungsalgorithmen für mobile Roboter Gruppe 1: - Stefanie Müller und Ina Bosse Hardware: LEGO MINDSTORM Programmiersprache:
Lego Mindstorms Softwarepraktikum Teamrobotik SS 2007 Thema: - Programmierung von Steuerungsalgorithmen für mobile Roboter Gruppe 1: - Stefanie Müller und Ina Bosse Hardware: LEGO MINDSTORM Programmiersprache:
Arbeit_Roboter. Setze einen Haken bei den Fragen, die du für richtig hältst: Bei Textantworten oder Lückentexten gib jeweils das Ergebnis an.
 Arbeit_Roboter drucken neu_sortieren verschicken verschicken_selbsttest Setze einen Haken bei den Fragen, die du für richtig hältst: Bei Textantworten oder Lückentexten gib jeweils das Ergebnis an. Vorname:
Arbeit_Roboter drucken neu_sortieren verschicken verschicken_selbsttest Setze einen Haken bei den Fragen, die du für richtig hältst: Bei Textantworten oder Lückentexten gib jeweils das Ergebnis an. Vorname:
Übungen. Version
 en Version 03.12.2018 by Luxembourg Institute of Science and Technology, 2018 Verwendung der Arbeitsblätter Folgende Informationen findest du auf jedem Arbeitsblatt. Das Material welches du für diese
en Version 03.12.2018 by Luxembourg Institute of Science and Technology, 2018 Verwendung der Arbeitsblätter Folgende Informationen findest du auf jedem Arbeitsblatt. Das Material welches du für diese
Messungen mit dem Lichtsensor
 Messungen mit dem Lichtsensor Für die Programmierung eines Roboters, der einer Linie folgt, brauchen wir für die drei Farben die Helligkeitswerte, die dein Lichtsensor jeweils ausgibt. Arbeite dazu folgende
Messungen mit dem Lichtsensor Für die Programmierung eines Roboters, der einer Linie folgt, brauchen wir für die drei Farben die Helligkeitswerte, die dein Lichtsensor jeweils ausgibt. Arbeite dazu folgende
Früh übt sich, wer ein Meister werden will!
 Farbige Isolierbänder, Karte LEGO Mindstorms Education EV3 #1 Früh übt sich, wer ein Meister werden will! /lego1 1. Baue ein Standardfahrzeug. Die Anleitung dazu findest du in der LEGO Mindstorms Education
Farbige Isolierbänder, Karte LEGO Mindstorms Education EV3 #1 Früh übt sich, wer ein Meister werden will! /lego1 1. Baue ein Standardfahrzeug. Die Anleitung dazu findest du in der LEGO Mindstorms Education
Inhaltsverzeichnis. Einleitung. LEGO MINDSTORMS - Von RCX zu EV3 Der intelligente EV3 22 Home- und Education-Edition 27
 Einleitung Teil I Grundlagen LEGO MINDSTORMS - Von RCX zu EV3 Der intelligente EV3 22 Home- und Education-Edition 27 2 Die Komponenten des EV3-Sets 29 Nutzen und Einsatzmöglichkeiten der elektronischen
Einleitung Teil I Grundlagen LEGO MINDSTORMS - Von RCX zu EV3 Der intelligente EV3 22 Home- und Education-Edition 27 2 Die Komponenten des EV3-Sets 29 Nutzen und Einsatzmöglichkeiten der elektronischen
Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT Braun
 mitp Professional Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT von Daniel Braun 1. Auflage Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT Braun schnell und portofrei erhältlich bei
mitp Professional Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT von Daniel Braun 1. Auflage Roboter programmieren mit NXT-G für LEGO MINDSTORMS NXT Braun schnell und portofrei erhältlich bei
Seite 1/6. ModellFerienPass.pdf).
.") Seite 1/6 NXC Programme Legomodell Am Ende dieser Doku findest ein Bild des Modells, das im Kurs eingesetzt wird. Alle Beispielprogramme basieren auf diesem Modell. Ein Anleitung zum Bau ist auf der CD
Seite 1/6 NXC Programme Legomodell Am Ende dieser Doku findest ein Bild des Modells, das im Kurs eingesetzt wird. Alle Beispielprogramme basieren auf diesem Modell. Ein Anleitung zum Bau ist auf der CD
EIN ERSTES PROGRAMM FÜR DEN EV3. LMS IDE (Blocksprache) INHALT
 INHALT") EIN ERSTES PROGRAMM FÜR INHALT Dieses Tutorial zeigt einen funktionierender Line-Follower Code. Weiterhin wird gezeigt wie Programme auf den EV3 übertragen werden können. Auch wird die Funktionsweise der
EIN ERSTES PROGRAMM FÜR INHALT Dieses Tutorial zeigt einen funktionierender Line-Follower Code. Weiterhin wird gezeigt wie Programme auf den EV3 übertragen werden können. Auch wird die Funktionsweise der
Baue deinen ersten Roboter
 D3kjd3Di38lk323nnm 2 Baue deinen ersten Roboter In Kapitel 1 hast du gelernt, dass Roboter aus Motoren, Sensoren und dem EV3-Stein bestehen. Damit du besser verstehst, wie diese zusammenarbeiten, setzen
D3kjd3Di38lk323nnm 2 Baue deinen ersten Roboter In Kapitel 1 hast du gelernt, dass Roboter aus Motoren, Sensoren und dem EV3-Stein bestehen. Damit du besser verstehst, wie diese zusammenarbeiten, setzen
NXC-Programmiersprache
 Seite 1 von 7 NXC-Programmiersprache Programmbefehle: Strg + N Strg + S Strg + F4 Alt + F4 Strg + P Strg + F Strg + R Strg + G F5 F6 Strg + Z Strg + (nach oben) + Z Strg + X Strg + C Strg + V Strg + Entf
Seite 1 von 7 NXC-Programmiersprache Programmbefehle: Strg + N Strg + S Strg + F4 Alt + F4 Strg + P Strg + F Strg + R Strg + G F5 F6 Strg + Z Strg + (nach oben) + Z Strg + X Strg + C Strg + V Strg + Entf
LEGO MINDSTORMS NXT MIT LABVIEW 2009 PROGRAMMIEREN
 LEGO MINDSTORMS NXT MIT LABVIEW 2009 PROGRAMMIEREN Prof. Dr.-Ing. Dahlkemper Fabian Schwartau Patrick Voigt 1 NXT DIRECT COMMANDS Es gibt zwei verschiedene Möglichkeiten, den NXT zu programmieren: Es werden
LEGO MINDSTORMS NXT MIT LABVIEW 2009 PROGRAMMIEREN Prof. Dr.-Ing. Dahlkemper Fabian Schwartau Patrick Voigt 1 NXT DIRECT COMMANDS Es gibt zwei verschiedene Möglichkeiten, den NXT zu programmieren: Es werden
EV3-TECHNIK. EV3-Sensoren
 Farbsensor Beim Farbsensor handelt es sich um einen digitalen Sensor, der die Farbe oder die Stärke des Lichts erkennen kann, das durch das kleine Fenster an der Vorderseite des Sensors eindringt. Dieser
Farbsensor Beim Farbsensor handelt es sich um einen digitalen Sensor, der die Farbe oder die Stärke des Lichts erkennen kann, das durch das kleine Fenster an der Vorderseite des Sensors eindringt. Dieser
Fragebogen zur Programmierung mit Aseba / VPL
 Fragebogen zur Programmierung mit Aseba / VPL Liebe/er Schüler/in Mit diesem Fragebogen möchten wir die Anwendungsmöglichkeiten des Thymio-II Roboter und der Aseba/VPL Software verbessern. Bitte beantworte
Fragebogen zur Programmierung mit Aseba / VPL Liebe/er Schüler/in Mit diesem Fragebogen möchten wir die Anwendungsmöglichkeiten des Thymio-II Roboter und der Aseba/VPL Software verbessern. Bitte beantworte
Softwarepraktikum Teamrobotik SS Gruppe 2
 Softwarepraktikum Teamrobotik SS 2007 Gruppe 2 1 LEGO MINDSTORMS NXT Education Base Set 2 Baumöglichkeiten 3 Die Hardware Sensoren: Lichtsensor Ultraschallsensor Geräuschsensor Berührungssensor 3 Motoren
Softwarepraktikum Teamrobotik SS 2007 Gruppe 2 1 LEGO MINDSTORMS NXT Education Base Set 2 Baumöglichkeiten 3 Die Hardware Sensoren: Lichtsensor Ultraschallsensor Geräuschsensor Berührungssensor 3 Motoren
Programmieren mit RoboLab Bauen mit Lego
 Programmieren mit RoboLab 2.5.2 Bauen mit Lego 1. Doppelstunde Kommunikation zwischen Computer und RCX herstellen können. Motoren im und gegen den Uhrzeigersinn für eine bestimmte Zeit drehen lassen können.
Programmieren mit RoboLab 2.5.2 Bauen mit Lego 1. Doppelstunde Kommunikation zwischen Computer und RCX herstellen können. Motoren im und gegen den Uhrzeigersinn für eine bestimmte Zeit drehen lassen können.
Wichtige Befehle bei der Programmierung von. FISCHER-Technik
 Wichtige Befehle bei der Programmierung von FISCHER-Technik 1 7 6 2 3 4 5 1) Interfacediagnose : Bevor du loslegst, teste alle, an den Eingängen E1-E8 angeschlossenen Schalter und Sensoren. Mit der linken
Wichtige Befehle bei der Programmierung von FISCHER-Technik 1 7 6 2 3 4 5 1) Interfacediagnose : Bevor du loslegst, teste alle, an den Eingängen E1-E8 angeschlossenen Schalter und Sensoren. Mit der linken
Arbeiten mit programmierbaren Robotern am Beispiel von LEGO Mindstorms NXT. Mag. DI Gerald Höfler, Georg von Peuerbachgymnasium, LINZ
 Arbeiten mit programmierbaren Robotern am Beispiel von LEGO Mindstorms NXT Mag. DI Gerald Höfler, Georg von Peuerbachgymnasium, LINZ Arbeiten mit LEGO Mindstorms Programmerstellung & Optimierung Erklärung
Arbeiten mit programmierbaren Robotern am Beispiel von LEGO Mindstorms NXT Mag. DI Gerald Höfler, Georg von Peuerbachgymnasium, LINZ Arbeiten mit LEGO Mindstorms Programmerstellung & Optimierung Erklärung
Einführung in die Programmierung des VEX IQ mit Modkit for VEX
 Einführung in die Programmierung des VEX IQ mit Modkit for VEX 0 Inhalt 0 Inhalt 2 1 Modkit for VEX herunterladen und installieren 3 2 Modkit Online Editor 4 3 VEX IQ Firmware-Aktualisierung 5 4 Programmieren
Einführung in die Programmierung des VEX IQ mit Modkit for VEX 0 Inhalt 0 Inhalt 2 1 Modkit for VEX herunterladen und installieren 3 2 Modkit Online Editor 4 3 VEX IQ Firmware-Aktualisierung 5 4 Programmieren
Pacman. Projektbeschreibung. Aus was wir Pacman nachgebaut haben. Anpassungen and die physikalische Welt, oder wie wir das
 Pacman Projektbeschreibung Übersicht: Unser Projekt Was Pacman eigentlich ist. Aus was wir Pacman nachgebaut haben. Anpassungen and die physikalische Welt, oder wie wir das Pacman-Spiel mit Lego implementiert
Pacman Projektbeschreibung Übersicht: Unser Projekt Was Pacman eigentlich ist. Aus was wir Pacman nachgebaut haben. Anpassungen and die physikalische Welt, oder wie wir das Pacman-Spiel mit Lego implementiert
Künstliche Intelligenz - Logische Agenten und Roboter
 Künstliche Intelligenz - Logische Agenten und Roboter Wird präsentiert von: Alexander Betker Gregor Biering Thiemo Esch Marko Flod Sascha Schewe Unser Motto: Zu Fünft agiert es sich besser. Übersicht 1.
Künstliche Intelligenz - Logische Agenten und Roboter Wird präsentiert von: Alexander Betker Gregor Biering Thiemo Esch Marko Flod Sascha Schewe Unser Motto: Zu Fünft agiert es sich besser. Übersicht 1.
Mess- und Regelungstechnik
 Mess- und Regelungstechnik Professor: Dr. Löffler Mang Semester: WS 00/01 Inhaltsverzeichnis 1. Thema 2. Das Mind- Storm- System 2.1 Der RCX 2.2 Die Sensoren 2.2.1 Der Tastsensor 2.2.2 Der Lichtsensor
Mess- und Regelungstechnik Professor: Dr. Löffler Mang Semester: WS 00/01 Inhaltsverzeichnis 1. Thema 2. Das Mind- Storm- System 2.1 Der RCX 2.2 Die Sensoren 2.2.1 Der Tastsensor 2.2.2 Der Lichtsensor
Viel Spaß beim Testen!!!
 go4it!-basis-workshop Der Licht-Sensor Dies ist der Licht-Sensor (Light-Sensor). Der Roboter kann damit die Helligkeit der Umgebung messen. Bevor ihr ihn benutzen könnt, solltet ihr den Roboter messen
go4it!-basis-workshop Der Licht-Sensor Dies ist der Licht-Sensor (Light-Sensor). Der Roboter kann damit die Helligkeit der Umgebung messen. Bevor ihr ihn benutzen könnt, solltet ihr den Roboter messen
Der Roboter wird auf einer 2 cm breiten, schwarzen Spur (mit Links- und Rechtskurven) gestartet.
 gestartet.") Info 13 LK (GA) Bearbeitungszeit: 225 min Seite 1 Aufgabe 1: Mindstorms Grundlage für alle Aufgaben ist ein Raupenroboter, wie du ihn aus dem Unterricht kennst. An den Sensoren sind je ein Lichtsensor
Info 13 LK (GA) Bearbeitungszeit: 225 min Seite 1 Aufgabe 1: Mindstorms Grundlage für alle Aufgaben ist ein Raupenroboter, wie du ihn aus dem Unterricht kennst. An den Sensoren sind je ein Lichtsensor
Roboter programmieren mit NXC für LEGO MINDSTORMS NXT
 Daniel Braun Roboter programmieren mit NXC für LEGO MINDSTORMS NXT mitp Vorwort 13 i NXTundNXC 15 i.i DerNXT 15 1.2 NXC 16 1.2.1 Not exactly С 16 1.2.2 Compiler 17 1.2.3 Zusammenfassung 17 2 BricxCC 19
Daniel Braun Roboter programmieren mit NXC für LEGO MINDSTORMS NXT mitp Vorwort 13 i NXTundNXC 15 i.i DerNXT 15 1.2 NXC 16 1.2.1 Not exactly С 16 1.2.2 Compiler 17 1.2.3 Zusammenfassung 17 2 BricxCC 19
Programmierung mit LEGO MINDSTORMS NXT. I. Informatik und algorithmisches Problemlösen
 Programmierung mit LEGO MINDSTORMS NXT I. Informatik und algorithmisches Problemlösen Prof. Dr. Karsten Berns Arbeitsgruppe Robotersysteme Fachbereich Informatik Technische Universität Kaiserslautern 30.09.2010
Programmierung mit LEGO MINDSTORMS NXT I. Informatik und algorithmisches Problemlösen Prof. Dr. Karsten Berns Arbeitsgruppe Robotersysteme Fachbereich Informatik Technische Universität Kaiserslautern 30.09.2010
Lego-Roboter im Informatik-Unterricht der Sekundarstufe I
 Neben Robolab und dem Robotics Invention System gibt es eine Vielzahl von Programmierumgebungen für Lego Mindstorms Roboter, z. B. NQC oder LEJOS. Des Weiteren gibt es ActiveX-Elemente, mit denen die Lego-Roboter
Neben Robolab und dem Robotics Invention System gibt es eine Vielzahl von Programmierumgebungen für Lego Mindstorms Roboter, z. B. NQC oder LEJOS. Des Weiteren gibt es ActiveX-Elemente, mit denen die Lego-Roboter
EINFÜHRUNG LEGO MINDSTORMS
 EINFÜHRUNG LEGO MINDSTORMS LabVIEW 2014 Prof. Dr.-Ing. Dahlkemper 1 NXT DIRECT COMMANDS Es gibt zwei verschiedene Möglichkeiten, die Lego-Roboter zu programmieren: Man kann das Programm direkt auf den
EINFÜHRUNG LEGO MINDSTORMS LabVIEW 2014 Prof. Dr.-Ing. Dahlkemper 1 NXT DIRECT COMMANDS Es gibt zwei verschiedene Möglichkeiten, die Lego-Roboter zu programmieren: Man kann das Programm direkt auf den
Calliope mini Projekt: Nachtlichter
 Wart ihr schon mal in einem Smart-Haus? Das ist ein Haus, das mitdenken kann. Man kann einem Haus zum Beispiel beibringen das Licht einzuschalten, wenn es draußen dunkel wird. Der kann nach diesem Projekt
Wart ihr schon mal in einem Smart-Haus? Das ist ein Haus, das mitdenken kann. Man kann einem Haus zum Beispiel beibringen das Licht einzuschalten, wenn es draußen dunkel wird. Der kann nach diesem Projekt
September Schülerinnen, 18 Schüler der Klassen G1 bis G4. Sabine Kaufmann, Barbara Hofmänner, Alexander Zerr
 12. 16. September 2016 5 Schülerinnen, 18 Schüler der Klassen G1 bis G4 Sabine Kaufmann, Barbara Hofmänner, Alexander Zerr Lego Mindstorms Wir (Flurina G2b und Kim G1a) waren in dem Projekt Lego Mindstorms.
12. 16. September 2016 5 Schülerinnen, 18 Schüler der Klassen G1 bis G4 Sabine Kaufmann, Barbara Hofmänner, Alexander Zerr Lego Mindstorms Wir (Flurina G2b und Kim G1a) waren in dem Projekt Lego Mindstorms.
ACTIONCards for. H. Milchram März 2019
 ACTIONCards for H. Milchram März 2019 Thymio Aktoren und Sensoren 5 Sensitive Knöpfe zum Wechseln der Verhaltensmuster und Steuerung des Thymio Ladezustandsanzeige Mikrofon Infrarotempfänger LEGO Konnektoren
ACTIONCards for H. Milchram März 2019 Thymio Aktoren und Sensoren 5 Sensitive Knöpfe zum Wechseln der Verhaltensmuster und Steuerung des Thymio Ladezustandsanzeige Mikrofon Infrarotempfänger LEGO Konnektoren
Thymio Challenge-Karten
 Thymio Challenge-Karten Thymio besteht mit deinen Programmen kleine Abenteuer. Tipps, Tricks und Musterlösungen: tiny.phzh.ch/ thymio Challenge-Karten Inhalt 0 Einführung 1 Leuchtsignale 2 Töne 3 Kennenlernen
Thymio Challenge-Karten Thymio besteht mit deinen Programmen kleine Abenteuer. Tipps, Tricks und Musterlösungen: tiny.phzh.ch/ thymio Challenge-Karten Inhalt 0 Einführung 1 Leuchtsignale 2 Töne 3 Kennenlernen
Fragen? Wie komme ich effizient zu einem Programm? Wie beschreibe/dokumentiere ich meine Idee?
 Fragen? Wie komme ich effizient zu einem Programm? Wie beschreibe/dokumentiere ich meine Idee? Schritte beim Programmieren Idee, was der Roboter tun soll? EVA-Prinzip E: Eingabe Welche Daten werden über
Fragen? Wie komme ich effizient zu einem Programm? Wie beschreibe/dokumentiere ich meine Idee? Schritte beim Programmieren Idee, was der Roboter tun soll? EVA-Prinzip E: Eingabe Welche Daten werden über
Henry Krasemann / Hilke Krasemann / Michael Friedrichs, LEGO -Boost-Roboter, dpunkt.verlag, ISBN
 D3kjd3Di38lk323nnm Henry Krasemann / Hilke Krasemann / Michael Friedrichs, LEGO -Boost-Roboter, dpunkt.verlag, ISBN 978-3-86490-536-0 Bauvorschlag: Radarwagen 12 Bei diesem Modell haben wir einen Wagen
D3kjd3Di38lk323nnm Henry Krasemann / Hilke Krasemann / Michael Friedrichs, LEGO -Boost-Roboter, dpunkt.verlag, ISBN 978-3-86490-536-0 Bauvorschlag: Radarwagen 12 Bei diesem Modell haben wir einen Wagen
LEGO -EV3-Roboter. Bauen und programmieren mit LEGO MINDSTORMS EV3. Bearbeitet von Laurens Valk
 LEGO -EV3-Roboter Bauen und programmieren mit LEGO MINDSTORMS EV3 Bearbeitet von Laurens Valk 1. Auflage 2014. Taschenbuch. XXII, 372 S. Paperback ISBN 978 3 86490 151 5 Format (B x L): 20 x 25 cm Weitere
LEGO -EV3-Roboter Bauen und programmieren mit LEGO MINDSTORMS EV3 Bearbeitet von Laurens Valk 1. Auflage 2014. Taschenbuch. XXII, 372 S. Paperback ISBN 978 3 86490 151 5 Format (B x L): 20 x 25 cm Weitere
mblock & mbot Roboter Programmierung auf der Basis von Scratch
 Roboter Programmierung auf der Basis von Scratch Simon Hefti Institut ICT & Medien www.iim.phsg.ch Pädagogische Hochschule St. Gallren, v1.1 April 2016 START mbot verbinden mblock mit mbot verbinden Der
Roboter Programmierung auf der Basis von Scratch Simon Hefti Institut ICT & Medien www.iim.phsg.ch Pädagogische Hochschule St. Gallren, v1.1 April 2016 START mbot verbinden mblock mit mbot verbinden Der
Gebaut und entwickelt von Jörg-Michael Weber (14) 1. Die Idee 2. Der mechanische Aufbau 3. Die Programmierung 4. Abschluss
 1. Die Idee 2. Der mechanische Aufbau 3. Die Programmierung 4. Abschluss") Gebaut und entwickelt von Jörg-Michael Weber (14) 1. Die Idee 2. Der mechanische Aufbau 3. Die Programmierung 4. Abschluss 1. Die Idee Ich kenne viele Leute, die Probleme beim Rückwärts-einparken haben
Gebaut und entwickelt von Jörg-Michael Weber (14) 1. Die Idee 2. Der mechanische Aufbau 3. Die Programmierung 4. Abschluss 1. Die Idee Ich kenne viele Leute, die Probleme beim Rückwärts-einparken haben
Softwarepraktikum Teamrobotik SS 2007 Abschlusspräsentation
 Inhalt des Vortrags Softwarepraktikum Teamrobotik SS 27 Abschlusspräsentation von Norman Siemer, Thomas Poltrock und Martin Schemmer Einleitung Aufgabenstellung: Kollisionsfreie Navigation durch einen
Inhalt des Vortrags Softwarepraktikum Teamrobotik SS 27 Abschlusspräsentation von Norman Siemer, Thomas Poltrock und Martin Schemmer Einleitung Aufgabenstellung: Kollisionsfreie Navigation durch einen
Wozu braucht man Geometrie? Kreisumfang
 Wozu braucht man Geometrie? Kreisumfang Roberta-Experiment mit dem LEGO Mindstorms NXT Roberta ist ein eingetragenes Warenzeichen der Fraunhofer-Gesellschaft e.v. Roberta ist seit 2010 Mitglied der Fraunhofer
Wozu braucht man Geometrie? Kreisumfang Roberta-Experiment mit dem LEGO Mindstorms NXT Roberta ist ein eingetragenes Warenzeichen der Fraunhofer-Gesellschaft e.v. Roberta ist seit 2010 Mitglied der Fraunhofer
Zugang Website:
 Posten: Bauen - Die SuS können das NXT Basismodel anhand der Bauanleitung 1:1 nachbauen. ( ) 30 - NXT Baukasten - Anleitung Auftrag: Baue das Basismodel von NXT. Halte dich dabei an die bereitgestellte
Posten: Bauen - Die SuS können das NXT Basismodel anhand der Bauanleitung 1:1 nachbauen. ( ) 30 - NXT Baukasten - Anleitung Auftrag: Baue das Basismodel von NXT. Halte dich dabei an die bereitgestellte
RobotC Beispielprogramme für EV3 Kepler Gymnasium Weil der Stadt Thomas Jörg Stand: 03. September 2018 Version 1.5
 RobotC Beispielprogramme für EV3 Kepler Gymnasium Weil der Stadt Thomas Jörg Stand: 03. September 2018 Version 1.5 SensorType (S3); SensorType [S3] = modeev3color_color; long rotwert; long gruenwert; long
RobotC Beispielprogramme für EV3 Kepler Gymnasium Weil der Stadt Thomas Jörg Stand: 03. September 2018 Version 1.5 SensorType (S3); SensorType [S3] = modeev3color_color; long rotwert; long gruenwert; long
Messgerät und Auswerte-Software (Logger Voltkraft ) Messgerät USB-Datenlogger Auswerte-Software Handhabung der Auswerte-Software
 Messgerät USB-Datenlogger Auswerte-Software Handhabung der Auswerte-Software") Messgerät und Auswerte-Software (Logger Voltkraft ) Das Messgerät ist in einem Kunststoffgehäuse untergebracht. Es verfügt über einen Sensorkopf, welcher für den besseren Luftaustausch durchbrochen ist,
Messgerät und Auswerte-Software (Logger Voltkraft ) Das Messgerät ist in einem Kunststoffgehäuse untergebracht. Es verfügt über einen Sensorkopf, welcher für den besseren Luftaustausch durchbrochen ist,
mitp Roboter Universum Das EV3 LEGO MINDSTORMS EV3 Ein umfassender Einstieg in Matthias Paul Scholz, Beate Jost, Thorsten Leimbach
 Matthias Paul Scholz, Beate Jost, Thorsten Leimbach Das EV3 Roboter Universum Ein umfassender Einstieg in LEGO MINDSTORMS EV3 mit 8 spannenden Roboterprojekten mitp Von von Inhaltsverzeichnis Einleitung
Matthias Paul Scholz, Beate Jost, Thorsten Leimbach Das EV3 Roboter Universum Ein umfassender Einstieg in LEGO MINDSTORMS EV3 mit 8 spannenden Roboterprojekten mitp Von von Inhaltsverzeichnis Einleitung
Lego Mindstorms. Diverse Übungen. Autor: Franz Philipp Website:
 Lego Mindstorms Diverse Übungen Autor: Franz Philipp Website: www.fraengg.ch Übersicht Sensoren...... 1 Übung 1 (Sensoren kennenlernen)...... 2 Übersicht NXT-Menü... 3 Übung 2 (Programme mit dem NXT schreiben)...
Lego Mindstorms Diverse Übungen Autor: Franz Philipp Website: www.fraengg.ch Übersicht Sensoren...... 1 Übung 1 (Sensoren kennenlernen)...... 2 Übersicht NXT-Menü... 3 Übung 2 (Programme mit dem NXT schreiben)...
Rotationssenor RCX. Lichtsensor. Motor. Drucksensor
 ROB und ROBINE bei den ROB und ROBINE, zwei junge Roboter, haben im Internet Informationen über die Powergirls aus Oberösterreich gefunden. Junge Mädchen und Technik, das klingt interessant und da wollen
ROB und ROBINE bei den ROB und ROBINE, zwei junge Roboter, haben im Internet Informationen über die Powergirls aus Oberösterreich gefunden. Junge Mädchen und Technik, das klingt interessant und da wollen
Helga Gruber NMS 2 Weiz Lernprogramm mindstorm Seite 1
 Helga Gruber NMS 2 Weiz Lernprogramm mindstorm Seite 1 IMST Innovationen machen Schulen Top Kompetenzorientiertes Lernen mit digitalen Medien INHALTSANGABE 1. PROJEKTPLANUNG S 3 2. BUILD A ROBOT BEISPIELE
Helga Gruber NMS 2 Weiz Lernprogramm mindstorm Seite 1 IMST Innovationen machen Schulen Top Kompetenzorientiertes Lernen mit digitalen Medien INHALTSANGABE 1. PROJEKTPLANUNG S 3 2. BUILD A ROBOT BEISPIELE
EV3 Programmierung mit Python 2.7 V1.4
 EV3 Programmierung mit Python 2.7 V1.4 Dustin Gärtner und Christopher Kukkel Wintersemester 2016/2017 1 Einführung Im Hardwarepraktikum werden neben den EWB-Versuchen auch Roboterversuche durchgeführt.
EV3 Programmierung mit Python 2.7 V1.4 Dustin Gärtner und Christopher Kukkel Wintersemester 2016/2017 1 Einführung Im Hardwarepraktikum werden neben den EWB-Versuchen auch Roboterversuche durchgeführt.
Den ROV3R bauen. Daniele Benedettelli, Das LEGO -MINDSTORMS -EV3-Labor, dpunkt.verlag, ISBN
 D3kjd3Di38lk323nnm Da du jetzt mit den Teilen aus dem EV3-Kasten vertraut bist, ist es nun an der Zeit, deinen ersten Roboter zu bauen: den mobilen ROV3R, für den du nur wenige Teile benötigst. Dank der
D3kjd3Di38lk323nnm Da du jetzt mit den Teilen aus dem EV3-Kasten vertraut bist, ist es nun an der Zeit, deinen ersten Roboter zu bauen: den mobilen ROV3R, für den du nur wenige Teile benötigst. Dank der
mblock & mbot Roboter Programmierung auf der Basis von Scratch
 Roboter Programmierung auf der Basis von Scratch Institut ICT & Medien www.iim.phsg.ch START mbot verbinden mblock mit mbot verbinden Der mbot-roboter kann mit der mblock-software programmiert werden.
Roboter Programmierung auf der Basis von Scratch Institut ICT & Medien www.iim.phsg.ch START mbot verbinden mblock mit mbot verbinden Der mbot-roboter kann mit der mblock-software programmiert werden.
Anleitungen. Version
 Anleitungen Version 05.12.2018 by Luxembourg Institute of Science and Technology, 2018 Anleitung Das Board Das Board einschalten Um Kniwwelino einzuschalten musst du es mit einem Micro USB Kabel an den
Anleitungen Version 05.12.2018 by Luxembourg Institute of Science and Technology, 2018 Anleitung Das Board Das Board einschalten Um Kniwwelino einzuschalten musst du es mit einem Micro USB Kabel an den
Vier Methoden zur Messwerterfassung
 Vier Methoden zur Messwerterfassung Es gibt vier Methoden, wie du ein Messwerterfassungs-Experiment mithilfe des NXT-Bausteins und des Messwerterfassungs- Fensters durchführen kannst. Die Methode, für
Vier Methoden zur Messwerterfassung Es gibt vier Methoden, wie du ein Messwerterfassungs-Experiment mithilfe des NXT-Bausteins und des Messwerterfassungs- Fensters durchführen kannst. Die Methode, für
2.1 Zufallsspiel: 10er Würfel
 2.1 Zufallsspiel: 10er Würfel Gib pxt.calliope.cc in einen Browser ein. Gehe auf und starte ein. Lösche die angezeigten Blöcke. Wir programmieren einen Würfel, der eine zufällige Zahl zwischen 0 und 9
2.1 Zufallsspiel: 10er Würfel Gib pxt.calliope.cc in einen Browser ein. Gehe auf und starte ein. Lösche die angezeigten Blöcke. Wir programmieren einen Würfel, der eine zufällige Zahl zwischen 0 und 9
Inhaltsverzeichnis. Vorwort NXTundNXC DerNXT NXC Not exactly C Compiler Zusammenfassung 17
 Vorwort 13 1 NXTundNXC 15 1.1 DerNXT 15 1.2 NXC 16 1.2.1 Not exactly C 16 1.2.2 Compiler 17 1.2.3 Zusammenfassung 17 2 BricxCC 19 2.1 Installation 19 2.2 Oberfläche 20 2.3 Menüleiste 22 2.3.1 Datei 22
Vorwort 13 1 NXTundNXC 15 1.1 DerNXT 15 1.2 NXC 16 1.2.1 Not exactly C 16 1.2.2 Compiler 17 1.2.3 Zusammenfassung 17 2 BricxCC 19 2.1 Installation 19 2.2 Oberfläche 20 2.3 Menüleiste 22 2.3.1 Datei 22
Arbeitsblatt: Wie rede ich mit einem Roboter?
 Arbeitsblatt: Wie rede ich mit einem Roboter? Ausgangslage: Ein Roboter besitzt Sensoren, um seine Umgebung wahrzunehmen, und Aktoren, um seine Umgebung zu beeinflussen. Auch Menschen besitzen Sensoren
Arbeitsblatt: Wie rede ich mit einem Roboter? Ausgangslage: Ein Roboter besitzt Sensoren, um seine Umgebung wahrzunehmen, und Aktoren, um seine Umgebung zu beeinflussen. Auch Menschen besitzen Sensoren
Dash- Crash- Kurs. ein Robotik-Workshop mit dem Roboter Dash
 Dash- Crash- Kurs ein Robotik-Workshop mit dem Roboter Dash Skript Übung 1: Disco Dash Blöcke die du brauchst: Dein Roboter hat Lust zu feiern! Lass ihn tanzen und sein Augenmuster ändern. Verändere auch
Dash- Crash- Kurs ein Robotik-Workshop mit dem Roboter Dash Skript Übung 1: Disco Dash Blöcke die du brauchst: Dein Roboter hat Lust zu feiern! Lass ihn tanzen und sein Augenmuster ändern. Verändere auch
KNAPP Robo League 2017
 KNAPP Robo League 2017 Wettbewerb Termin: Dienstag 20.06.2017 14:00 Uhr bis 18:00 Uhr Wettbewerbsort: KNAPP AG, Günter-Knapp-Straße 5-7, 8075 Hart bei Graz Anmeldung: mit ausgefülltem Anmeldeformular per
KNAPP Robo League 2017 Wettbewerb Termin: Dienstag 20.06.2017 14:00 Uhr bis 18:00 Uhr Wettbewerbsort: KNAPP AG, Günter-Knapp-Straße 5-7, 8075 Hart bei Graz Anmeldung: mit ausgefülltem Anmeldeformular per
mit der gratis erhältlichen Entwicklungsoberfläche BricxCC und der Programmiersprache NXC.
 Kepler Robo League Kurzinformation für Schulen Was ist die Kepler Robo League? eine Bildungsinitiative des Bundesrealgymnasiums Keplerstraße zum Einstieg in das Bauen und Programmieren von Robotern ohne
Kepler Robo League Kurzinformation für Schulen Was ist die Kepler Robo League? eine Bildungsinitiative des Bundesrealgymnasiums Keplerstraße zum Einstieg in das Bauen und Programmieren von Robotern ohne
KNAPP Robo League 2018
 KNAPP Robo League 2018 Wettbewerb Termin: Mittwoch 30.05.2018 14:00 Uhr bis 18:00 Uhr Wettbewerbsort: KNAPP Industry Solutions GmbH, Gewerbeparkstaße 17, 8143 Dobl Anmeldung: mit ausgefülltem Anmeldeformular
KNAPP Robo League 2018 Wettbewerb Termin: Mittwoch 30.05.2018 14:00 Uhr bis 18:00 Uhr Wettbewerbsort: KNAPP Industry Solutions GmbH, Gewerbeparkstaße 17, 8143 Dobl Anmeldung: mit ausgefülltem Anmeldeformular
LEGO Baustein-Übersicht für das Set 45544
 Lager, Modullänge ½, gelb 4239601 Lager, Modullänge 1, grau 4211622 60x Verbindungsstift mit Reibstück, 4121715 Verbindungsstift, Modullänge 2, grau 4211807 Achse mit Kopf, Modullänge 3, dunkelbeige 6031821
Lager, Modullänge ½, gelb 4239601 Lager, Modullänge 1, grau 4211622 60x Verbindungsstift mit Reibstück, 4121715 Verbindungsstift, Modullänge 2, grau 4211807 Achse mit Kopf, Modullänge 3, dunkelbeige 6031821
REGULAR CATEGORY 2019 Altersklasse Elementary
 Aufgabenstellung für die REGULAR CATEGORY 2019 Altersklasse Elementary Smart Passenger Transport Inhaltsverzeichnis 1 WRO Leitprinzipien... 2 2 Einleitung... 3 3 Spielfeldübersicht... 4 4 Spielfeldobjekte...
Aufgabenstellung für die REGULAR CATEGORY 2019 Altersklasse Elementary Smart Passenger Transport Inhaltsverzeichnis 1 WRO Leitprinzipien... 2 2 Einleitung... 3 3 Spielfeldübersicht... 4 4 Spielfeldobjekte...
Sie bauen Ihren ersten Roboter
 2 Sie bauen Ihren ersten Roboter Wie Sie in Kapitel 1 gesehen haben, besteht ein Roboter aus mehreren wichtigen Bestandteilen. Damit Sie die Funktionsweise der einzelnen Teile mühelos und Schritt für Schritt
2 Sie bauen Ihren ersten Roboter Wie Sie in Kapitel 1 gesehen haben, besteht ein Roboter aus mehreren wichtigen Bestandteilen. Damit Sie die Funktionsweise der einzelnen Teile mühelos und Schritt für Schritt