Einsatz von Aruco-Markern zur Positionsbestimmung
|
|
|
- Thomas Schumacher
- vor 4 Jahren
- Abrufe
Transkript
1 Einsatz von Aruco-Markern zur Positionsbestimmung Seite 1
2 Gliederung Was sind ArUco Marker Markererkennung Einsatzgebiete Einsatz in der Fahrzeugprüfungi Probleme Seite 2

3 ArUco Entwickelt von der Fachgruppe "Applications of Artificial Vision" (A.V.A) der University of Cordoba Open Source C++ Bibliothek zur Erkennung von Markern und Berechnung der Posen [1] Setzt auf OpenCV auf, platformunabhängig Portierungen für Python, ROS, JavaScript usw. verfügbar Seite 3

4 ArUco dictionary Ähnliche Markerbibliotheken wie z.b. ArToolKit+, Chilitags, AprilTags ArUco kann eigene dictionaries generieren Maximale Inter-MarkerDistanz Pose kann berechnet werden [1] Seite 4



5 Markeraufbau Marker wird durch vier Punkte und ID repräsentiert Äußerer Rand schwarz zur Erkennung Innen Bitmuster mit codierter ID Pose wird aus den vier Eckpunkten, Kameramatrix und bekannter Markergröße berechnet [1] Seite 5

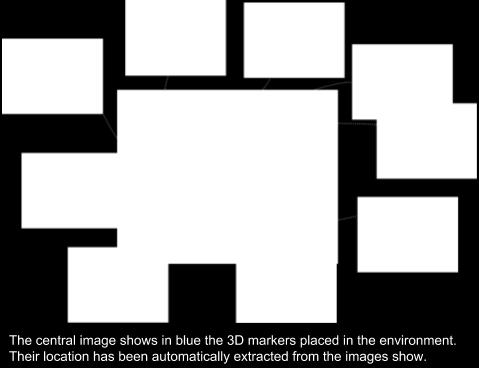
6 Markermaps [1] [1] Seite 6
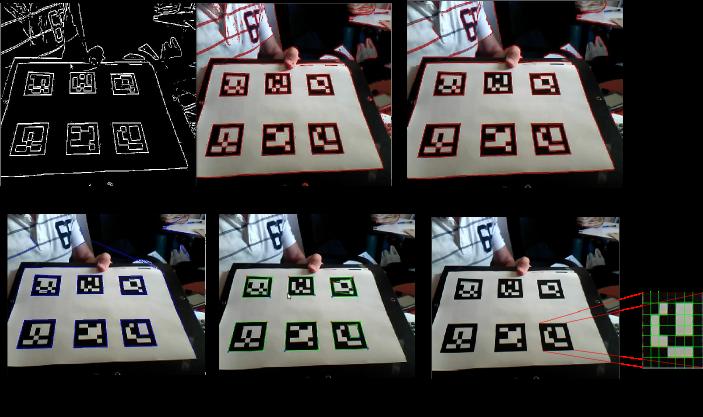

7 Markererkennung [1] Seite 7




8 Einsatzgebiete [1] [1] [2] [3] Seite 8
 soll im Fahrzeugkoordinatensystem vorliegen Einfacher Aufbau, flexibel einsetzbar Genauigkeit von 2,5cm")
9 Einsatz in der Fahrzeugprüfung Roboter gestützte Prüfung der Nahbereichssensorik Fahrzeug und Roboter besitzen verschiedene Koordinatensysteme Auswertung (Sensorwert bei Position X,Y) soll im Fahrzeugkoordinatensystem vorliegen Einfacher Aufbau, flexibel einsetzbar Genauigkeit von 2,5cm Seite 9

10 Einsatz in der Fahrzeugprüfung Seite 10

11 Einsatz in der Fahrzeugprüfung Seite 11
12 Einsatz in der Fahrzeugprüfung Kamerabasierte Scheinwerferprüfung Scheinwerfereinstellung wird während der Einfahrt auf den Prüfstand gemessen Anfahrtslinie, Marker, Leinwand und zwei Kameras benötigt Fahrzeug fährt entlang der Linie auf Leinwand zu Scheinwerferbild wird analysiert Seite 12

13 Einsatz in der Fahrzeugprüfung Seite 13


14 Einsatz in der Fahrzeugprüfung Seite 14

15 Probleme: Radialdistanz ARUCO_MIP_16h3 (4x4 Marker dictionary) 13cm Kantenlänge Industriekamera 1/1.2" Sensor 1920x1200px 8mm Objektiv Referenzmessung per Laser Seite 15


16 Lösungsansatz: Radialdistanz Mehrere Marker in definiertem Abstand mit detektierten Abstand vergleichen und Position korrigieren Markerboards Größere Marker enclosed markers Höhere Kameraauflösung Seite 16
17 Problem: Achsen nicht eindeutig MarkerTracker bei bewegten Kameras Größere Marker bzw. Markerboards oder höhere Auflösung bei statischen Kameras Zusatzinformationen: Marker darf nicht oberhalb der Kamera sein [1] Seite 17
18 Zusammenfassung Pro Kontra Günstig in der Anschaffung (Kamera, Marker) Einfach zu implementieren Flexibel einsetzbar Robust Gute Performance Teilweise ungenaue Distanz Achsen können u.u. flippen Seite 18
19 Vielen Dank für Ihre Aufmerksamkeit! Seite 19
20 Quellen Bildquellen [1] ArUco Dokumentation: ArUco: An efficient library for detection of planar markers and camera pose estimation, usp=sharing [2] Setting up ArUco Library on your PC, md [3] The Next Digit: Alphabet Inc. Wants to Sell Boston Dynamics, Paper Alberto López-Cerón, Accuracy analysis of marker-based 3D visual localization R. Muñoz-Salinas, F. Madrid-Cuevas, R. Medina-Carnicer, Generation of fiducial marker dictionaries using Mixed Integer Linear Programming S. Garrido-Jurado n, R. Muñoz-Salinas, F.J. Madrid-Cuevas, M.J. Marín-Jiménez, Automatic generation and detection of highly reliable fiducial markers under occlusion F. Romero-Ramirez, R. Muñoz-Salinas, R. Medina-Carnicer, Speeded up detection of squared fiducial markers Seite 20
Entwicklung eines fächerartigen Distanzmesssystems zur Messung von Rotorblättern. Konzept, Orientierung und erste Ergebnisse
 Entwicklung eines fächerartigen Distanzmesssystems zur Messung von Rotorblättern Konzept, Orientierung und erste Ergebnisse Martina Göring M.Sc. & Prof. Dr. Thomas Luhmann AUFGABENSTELLUNG Entwicklung
Entwicklung eines fächerartigen Distanzmesssystems zur Messung von Rotorblättern Konzept, Orientierung und erste Ergebnisse Martina Göring M.Sc. & Prof. Dr. Thomas Luhmann AUFGABENSTELLUNG Entwicklung
Untersuchung und Modellierung des Rolling-Shutter-Effekts für photogrammetrische Einzel- und Mehrbildauswertungen
 Untersuchung und Modellierung des Rolling-Shutter-Effekts für photogrammetrische Einzel- und Mehrbildauswertungen 16. Oldenburger 3D-Tage 2017 Oldenburg, 2. Februar 2017 Robin Rofallski & Thomas Luhmann
Untersuchung und Modellierung des Rolling-Shutter-Effekts für photogrammetrische Einzel- und Mehrbildauswertungen 16. Oldenburger 3D-Tage 2017 Oldenburg, 2. Februar 2017 Robin Rofallski & Thomas Luhmann
HAW Hamburg Anwendung 1 - Vortrag Andrej Rull
 HAW Hamburg Anwendung 1 - Vortrag Andrej Rull 02122008 1 Gliederung o Motivation o Der Anwendungsfall o Das SLAM Problem o Lösungsansätze und Algorithmen o Zusammenfassung o Ausblick auf AW2 2 Motivation
HAW Hamburg Anwendung 1 - Vortrag Andrej Rull 02122008 1 Gliederung o Motivation o Der Anwendungsfall o Das SLAM Problem o Lösungsansätze und Algorithmen o Zusammenfassung o Ausblick auf AW2 2 Motivation
Anwendungsbezogenes Tracking
 Institut für Computervisualistik Universität Koblenz 4. Juli 2011 Inhaltsverzeichnis 1 Sensorbasiertes Tracking GPS WLan Elektronischer Kompass Inertialsensoren 2 Bildbasiertes Tracking Markerbasiertes
Institut für Computervisualistik Universität Koblenz 4. Juli 2011 Inhaltsverzeichnis 1 Sensorbasiertes Tracking GPS WLan Elektronischer Kompass Inertialsensoren 2 Bildbasiertes Tracking Markerbasiertes
Gesichtsidentifikation mit dem Erkennungssystem FaceVACS SDK der Firma Cognitec
 Gesichtsidentifikation mit dem Erkennungssystem FaceVACS SDK der Firma Cognitec Zwischenpräsentation Autoren: Alexander Mielchen und Lorenz Kaipf 20.05.2014 1 Gliederung Aufgabenstellung und Randbedingungen
Gesichtsidentifikation mit dem Erkennungssystem FaceVACS SDK der Firma Cognitec Zwischenpräsentation Autoren: Alexander Mielchen und Lorenz Kaipf 20.05.2014 1 Gliederung Aufgabenstellung und Randbedingungen
Quadrocopters and it s Applications: Overview of State of the Art Techniques
 : Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
: Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
Software für Machine Vision Was wirklich zählt Dr. Wolfgang Eckstein MVTec Software GmbH
 Software für Machine Vision Was wirklich zählt Dr. Wolfgang Eckstein MVTec Software GmbH MVTec Software GmbH Firma konzentriert sich auf Building Vision for Business Entwicklung von Standard Softwareprodukten
Software für Machine Vision Was wirklich zählt Dr. Wolfgang Eckstein MVTec Software GmbH MVTec Software GmbH Firma konzentriert sich auf Building Vision for Business Entwicklung von Standard Softwareprodukten
Bewegungsplanung für den vierbeinigen Roboter AMEE. Björn Bettzüche
 Bewegungsplanung für den vierbeinigen Roboter AMEE Einleitung Vergleichbare Arbeiten Zusammenfassung Referenzen Projekt AMEE SAR 4 intelligente Beine SLAM Sicheres Navigieren 4 [5] 5 Bildbasiert zu ungenau
Bewegungsplanung für den vierbeinigen Roboter AMEE Einleitung Vergleichbare Arbeiten Zusammenfassung Referenzen Projekt AMEE SAR 4 intelligente Beine SLAM Sicheres Navigieren 4 [5] 5 Bildbasiert zu ungenau
RatSLAM. Torben Becker. 24. Mai HAW Hamburg
 HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
Tracking Technologien für Augmented Reality
 Tracking Technologien für Augmented Reality 1 Inhalt Motivation Tracking Methoden Optisch MarkerlessTracking (kleine Wiederholung) Aktiv und Passive Marker Modellbasiertes Markerless Tracking Sensoren
Tracking Technologien für Augmented Reality 1 Inhalt Motivation Tracking Methoden Optisch MarkerlessTracking (kleine Wiederholung) Aktiv und Passive Marker Modellbasiertes Markerless Tracking Sensoren
Plakate / Plots. DIN A3 (297 x 420 mm) DATEN: BITTE BEACHTEN SIE: 30,1 29,7 cm (Endformat) 42,0 cm (Endformat) 42,4. Datenformat
 DATEN: BITTE BEACHTEN SIE: 30,1 29,7 cm (Endformat) 42,0 cm (Endformat) 42,4. Datenformat") DIN A3 (297 x 420 mm) 30,1 29,7 cm () 42,4 42,0 cm () + Beschnittzugabe 301 x 424 mm 297 x 420 mm Rand des es reichen, sonst können beim DIN A2 (420 x 594 mm) 42,4 42,0 cm () 59,8 59,4 cm () + Beschnittzugabe
DIN A3 (297 x 420 mm) 30,1 29,7 cm () 42,4 42,0 cm () + Beschnittzugabe 301 x 424 mm 297 x 420 mm Rand des es reichen, sonst können beim DIN A2 (420 x 594 mm) 42,4 42,0 cm () 59,8 59,4 cm () + Beschnittzugabe
Kartenerstellung und Navigation
 Kartenerstellung und Navigation zur Positionserkennung autonomer Fahrzeuge von Ilona Blanck 27. Mai 2008 im Rahmen der Anwendungen I Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik
Kartenerstellung und Navigation zur Positionserkennung autonomer Fahrzeuge von Ilona Blanck 27. Mai 2008 im Rahmen der Anwendungen I Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik
Managen Sie Ihr 3D-Gebäudemodell interaktiv. Von Anfang an.
 Managen Sie Ihr 3D-Gebäudemodell interaktiv. Von Anfang an. 1 Kollisionsprüfung (Clash-Detection) Autor: ar, jh DESITE MD PRO: 2.2 2 1 Kollisionsprüfung Mithilfe der Kollisionsprüfung können geometrische
Managen Sie Ihr 3D-Gebäudemodell interaktiv. Von Anfang an. 1 Kollisionsprüfung (Clash-Detection) Autor: ar, jh DESITE MD PRO: 2.2 2 1 Kollisionsprüfung Mithilfe der Kollisionsprüfung können geometrische
Implementierung des Scan-Matching-Algorithmus MbICP im Fach Mensch-Maschine- Kommunikation/Robotik
 Implementierung des Scan-Matching-Algorithmus MbICP im Fach Mensch-Maschine- Kommunikation/Robotik Betreuer: Dipl.-Inf. (FH) Peter Poschmann Enrico Uhlig, Markus Fischer, Marcus Kupke 26. Jun 2012 1 Gliederung
Implementierung des Scan-Matching-Algorithmus MbICP im Fach Mensch-Maschine- Kommunikation/Robotik Betreuer: Dipl.-Inf. (FH) Peter Poschmann Enrico Uhlig, Markus Fischer, Marcus Kupke 26. Jun 2012 1 Gliederung
Abstandsmessung mit Schall und Funk
 Abstandsmessung mit Schall und Funk Steven Fluck (steven@student.ethz.ch) Fachseminar: Verteilte Systeme SS2006 Betreuer: Kay Römer 1 Motivation und Einleitung Die meisten Lokalisierungstechniken basieren
Abstandsmessung mit Schall und Funk Steven Fluck (steven@student.ethz.ch) Fachseminar: Verteilte Systeme SS2006 Betreuer: Kay Römer 1 Motivation und Einleitung Die meisten Lokalisierungstechniken basieren
Modellbasierte Softwareentwicklung eines Kamera basierten Scheinwerfer-Adaptions-Algorithmus. Gerd Mauthe
 Modellbasierte Softwareentwicklung eines Kamera basierten Scheinwerfer-Adaptions-Algorithmus Gerd Mauthe München 10.05.2016 MATLAB Expo 2016 Inhalte Vorstellung Thema Algorithmus Konzepte Implementierung
Modellbasierte Softwareentwicklung eines Kamera basierten Scheinwerfer-Adaptions-Algorithmus Gerd Mauthe München 10.05.2016 MATLAB Expo 2016 Inhalte Vorstellung Thema Algorithmus Konzepte Implementierung
Himbeere mit zwei Augen. 3D-Fotografie mit dem Raspberry Pi Kameramodul
 20. 3D-Kongress der DGS, Berlin 2018 Himbeere mit zwei Augen 3D-Fotografie mit dem Raspberry Pi Kameramodul Günter Pomaska,, gp@imagefact.de 1 Himbeere mit zwei Augen Einplatinencomputer Raspberry Pi Kameramodul
20. 3D-Kongress der DGS, Berlin 2018 Himbeere mit zwei Augen 3D-Fotografie mit dem Raspberry Pi Kameramodul Günter Pomaska,, gp@imagefact.de 1 Himbeere mit zwei Augen Einplatinencomputer Raspberry Pi Kameramodul
Indoor Location Tracking and Information System
 Master Thesis Indoor Location Tracking and Information System Thomas Blocher tblocher@ee.oulu.fi TU Graz Österreich IMST GmbH Deutschland Indoor Location Tracking and Information System p. 1/14 Gliederung
Master Thesis Indoor Location Tracking and Information System Thomas Blocher tblocher@ee.oulu.fi TU Graz Österreich IMST GmbH Deutschland Indoor Location Tracking and Information System p. 1/14 Gliederung
Kamerabasierte Erkennung von Fußgängern in urbanen Verkehrsszenen
 Kamerabasierte Erkennung von Fußgängern in urbanen Verkehrsszenen Vortragender: Studiengang: Betreuer: Yeyi Qiu Fahrzeugtechnik Prof. Dr. rer. nat. Toralf Trautmann M. Sc. Patrick Richter Seite 01 von
Kamerabasierte Erkennung von Fußgängern in urbanen Verkehrsszenen Vortragender: Studiengang: Betreuer: Yeyi Qiu Fahrzeugtechnik Prof. Dr. rer. nat. Toralf Trautmann M. Sc. Patrick Richter Seite 01 von
10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart
 10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart M.Eng. Marius Ziegler Projektleiter: Prof. Dr. M. Hahn 07. November 2014 Mobile Mapping Kernelemente Messgeräte zur Positionsbestimmung
10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart M.Eng. Marius Ziegler Projektleiter: Prof. Dr. M. Hahn 07. November 2014 Mobile Mapping Kernelemente Messgeräte zur Positionsbestimmung
Intel Thread Checker
 Kurs 1: Ferienakademie 2009 26. September 2009 Gliederung Gliederung Was macht der Thread Checker und warum? Historisches Alternativen Was macht der Thread Checker und warum? Historisches Alternativen
Kurs 1: Ferienakademie 2009 26. September 2009 Gliederung Gliederung Was macht der Thread Checker und warum? Historisches Alternativen Was macht der Thread Checker und warum? Historisches Alternativen
MARKERLESS AUGMENTED REALITY. Henrik Brauer
 MARKERLESS AUGMENTED REALITY Henrik Brauer Inhalt Was ist Augmented Reality Meine Motivation Grundlagen Positionsbestimmung mit Marker Positionsbestimmung ohne Marker Idee Risiken INHALT Augmented Reality
MARKERLESS AUGMENTED REALITY Henrik Brauer Inhalt Was ist Augmented Reality Meine Motivation Grundlagen Positionsbestimmung mit Marker Positionsbestimmung ohne Marker Idee Risiken INHALT Augmented Reality
Einsatz einer low cost Drohne. für hochauflösende Fernerkundung. in der Forstwirtschaft
 Einsatz einer low cost Drohne für hochauflösende Fernerkundung in der Forstwirtschaft Kai Jütte, Landesforst Mecklenburg-Vorpommern -Anstalt öffentlichen Rechts- Betriebsteil Forstliche Informationssysteme
Einsatz einer low cost Drohne für hochauflösende Fernerkundung in der Forstwirtschaft Kai Jütte, Landesforst Mecklenburg-Vorpommern -Anstalt öffentlichen Rechts- Betriebsteil Forstliche Informationssysteme
RIEGL VMX-250 Mobile Laser Scanning System am Beispiel der Paläste am Canal Grande, Venedig Hamburger Anwenderforum, Juni 2011
 RIEGL VMX-250 Mobile Laser Scanning System am Beispiel der Paläste am Canal Grande, Venedig Hamburger Anwenderforum, Juni 2011 Nikolaus STUDNICKA, Gerald ZACH, Phillipp AMON, Martin PFENNIGBAUER RIEGL
RIEGL VMX-250 Mobile Laser Scanning System am Beispiel der Paläste am Canal Grande, Venedig Hamburger Anwenderforum, Juni 2011 Nikolaus STUDNICKA, Gerald ZACH, Phillipp AMON, Martin PFENNIGBAUER RIEGL
Augmented Reality. technische Möglichkeiten und praktische Anwendung. Prof. Dr. Gerhard Reitmayr ICG, TU Graz
 Augmented Reality technische Möglichkeiten und praktische Anwendung Prof. Dr. Gerhard Reitmayr ICG, TU Graz Daten mit Raumbezug 2 Visualisierung Augmented Reality 3 Augmented Reality Verbindet Reales und
Augmented Reality technische Möglichkeiten und praktische Anwendung Prof. Dr. Gerhard Reitmayr ICG, TU Graz Daten mit Raumbezug 2 Visualisierung Augmented Reality 3 Augmented Reality Verbindet Reales und
Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen
 Sicherheit durch Fahrerassistenz 2010 Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen Wojciech Derendarz, Thorsten Graf Volkswagen AG Friedrich M. Wahl TU Braunschweig,
Sicherheit durch Fahrerassistenz 2010 Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen Wojciech Derendarz, Thorsten Graf Volkswagen AG Friedrich M. Wahl TU Braunschweig,
Aufbaubegleitende Vermessung beim Wendelstein 7-X
 Aufbaubegleitende Vermessung beim Jörg Müller Unternehmung D-17491 Greifswald, Wendelsteinstraße 1 Dipl. Ing. (FH) Jörg Müller Norddeutsche Fachtage, 11. - 12.04.2008 Gliederung Allgemeines Messgeräte
Aufbaubegleitende Vermessung beim Jörg Müller Unternehmung D-17491 Greifswald, Wendelsteinstraße 1 Dipl. Ing. (FH) Jörg Müller Norddeutsche Fachtage, 11. - 12.04.2008 Gliederung Allgemeines Messgeräte
Endvortrag Echtzeitsystem Projektseminar
 Endvortrag Echtzeitsystem Projektseminar Team Apollo 13: Sebastian Ehmes, Nicolas Acero, Huyhn-Tan Truong, Li Zhao 1 29.02.16 Gliederung I. Recap: Mission 1 & Mission 2 II. Mission 2: Selbstlokalisierung
Endvortrag Echtzeitsystem Projektseminar Team Apollo 13: Sebastian Ehmes, Nicolas Acero, Huyhn-Tan Truong, Li Zhao 1 29.02.16 Gliederung I. Recap: Mission 1 & Mission 2 II. Mission 2: Selbstlokalisierung
Einsatz von Tiefenkameras zur Mensch/Roboter-Überwachung
 Einsatz von Tiefenkameras zur Mensch/Roboter-Überwachung Prof. Dr. Dominik Henrich Lehrstuhl für Angewandte Informatik III (Robotik und Eingebettete Systeme) Universität Bayreuth Technologie der Tiefenkameras
Einsatz von Tiefenkameras zur Mensch/Roboter-Überwachung Prof. Dr. Dominik Henrich Lehrstuhl für Angewandte Informatik III (Robotik und Eingebettete Systeme) Universität Bayreuth Technologie der Tiefenkameras
Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform. Thorsten Jost INF-M2 AW1 Sommersemester
 Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform Thorsten Jost INF-M2 AW1 Sommersemester 2008 Agenda Motivation Feature Detection Beispiele Posenbestimmung in Räumen
Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform Thorsten Jost INF-M2 AW1 Sommersemester 2008 Agenda Motivation Feature Detection Beispiele Posenbestimmung in Räumen
Mobile projizierte Benutzerschnittstellen
 Mobile projizierte Benutzerschnittstellen Caroline Bösinger 10. Mai 2005 Betreuer: Marc Langheinrich Überblick Einführung Vorstellung von drei Systemen: 1) Mobiles Display mit Lichtsensor: BurningWell
Mobile projizierte Benutzerschnittstellen Caroline Bösinger 10. Mai 2005 Betreuer: Marc Langheinrich Überblick Einführung Vorstellung von drei Systemen: 1) Mobiles Display mit Lichtsensor: BurningWell
Autonomous Systems Lab Zürich
 Philipp Krüsi 03.11.2011 Steuerung von UGVs Manuelle Fernsteuerung a) Fahrzeug in Sichtweite: Fahren auf Sicht b) Fahrzeug ausser Sicht: Steuerung mit Hilfe von Kamera-Bildern od. anderen Sensoren Autonome
Philipp Krüsi 03.11.2011 Steuerung von UGVs Manuelle Fernsteuerung a) Fahrzeug in Sichtweite: Fahren auf Sicht b) Fahrzeug ausser Sicht: Steuerung mit Hilfe von Kamera-Bildern od. anderen Sensoren Autonome
Neues Verfahren zur Roboterzielführung ohne Kalibrierung
 Lernende Roboterführung Roboteraugen werden autonomer, leistungsfähiger und genauer Neues Verfahren zur Roboterzielführung ohne Kalibrierung Unter dem Namen AURA (Adaptive Uncalibrated Robot Automation)
Lernende Roboterführung Roboteraugen werden autonomer, leistungsfähiger und genauer Neues Verfahren zur Roboterzielführung ohne Kalibrierung Unter dem Namen AURA (Adaptive Uncalibrated Robot Automation)
Echtzeitfähige Algorithmen für markerloses Tracking und Umfelderkennung , Dr.-Ing. Steffen Herbort, A.R.T. GmbH
 Echtzeitfähige Algorithmen für markerloses Tracking und Umfelderkennung 26.10.2016, TP 2: Arbeiten von A.R.T. TP2: Tracking und Umfelderkennung Markerloses Tracking texturierte Objekte Umfelderkennung
Echtzeitfähige Algorithmen für markerloses Tracking und Umfelderkennung 26.10.2016, TP 2: Arbeiten von A.R.T. TP2: Tracking und Umfelderkennung Markerloses Tracking texturierte Objekte Umfelderkennung
Gliederung: 1) Einleitung 2) Oberflächenvergleich 3) Objekterkennung
 Einleitung 2) Oberflächenvergleich 3) Objekterkennung") Using Spin Images for Efficient Object Recogition in Cluttered 3D Scenes (Effiziente Objekterkennung von ungeordneten 3D Szenen mithilfe von Spin Images) Gliederung: 1) Einleitung 2) Oberflächenvergleich
Using Spin Images for Efficient Object Recogition in Cluttered 3D Scenes (Effiziente Objekterkennung von ungeordneten 3D Szenen mithilfe von Spin Images) Gliederung: 1) Einleitung 2) Oberflächenvergleich
Fehlererkennung beim 3D Druck
 Daniel Nägele, Robert Gänzle und Lan Jiang Institut für Rechnergestützte Ingenieursysteme Universität Stuttgart 12. September 2014 Übersicht 1 Allgemeines Ziele Hardware 2 Bildverarbeitung Grundsätzliches
Daniel Nägele, Robert Gänzle und Lan Jiang Institut für Rechnergestützte Ingenieursysteme Universität Stuttgart 12. September 2014 Übersicht 1 Allgemeines Ziele Hardware 2 Bildverarbeitung Grundsätzliches
Versuchsprotokoll. Mathematisch-Naturwissenschaftliche Fakultät I Institut für Physik. Versuch O8: Fraunhofersche Beugung Arbeitsplatz Nr.
 Mathematisch-Naturwissenschaftliche Fakultät I Institut für Physik Physikalisches Grundpraktikum I Versuchsprotokoll Versuch O8: Fraunhofersche Beugung Arbeitsplatz Nr. 1 0. Inhaltsverzeichnis 1. Einleitung.
Mathematisch-Naturwissenschaftliche Fakultät I Institut für Physik Physikalisches Grundpraktikum I Versuchsprotokoll Versuch O8: Fraunhofersche Beugung Arbeitsplatz Nr. 1 0. Inhaltsverzeichnis 1. Einleitung.
Sprachsteuerung für einen ROS-basierten Assistenzroboter
 Masterseminar WS 2014/2015 04.11.2014 Sprachsteuerung für einen ROS-basierten Assistenzroboter Mosawer Ahmad Nurzai M-INF3 Agenda Einführung Arbeiten Projekt 1 Sprachsteuerungsinterface Projekt 2 Unterstützende
Masterseminar WS 2014/2015 04.11.2014 Sprachsteuerung für einen ROS-basierten Assistenzroboter Mosawer Ahmad Nurzai M-INF3 Agenda Einführung Arbeiten Projekt 1 Sprachsteuerungsinterface Projekt 2 Unterstützende
BUILDINGS FROM IMAGES T H I E N P H A M G R U N D S E M I N A R W S 1 5 / 1 6 B E T R E U E R : P R O F. D R. P H I L I P P J E N K E
 BUILDINGS FROM IMAGES T H I E N P H A M G R U N D S E M I N A R W S 1 5 / 1 6 B E T R E U E R : P R O F. D R. P H I L I P P J E N K E AGENDA Einführung Beispiele zur Gebäudeerkennung 3D-Objekte in der
BUILDINGS FROM IMAGES T H I E N P H A M G R U N D S E M I N A R W S 1 5 / 1 6 B E T R E U E R : P R O F. D R. P H I L I P P J E N K E AGENDA Einführung Beispiele zur Gebäudeerkennung 3D-Objekte in der
Managen Sie Ihr 3D-Gebäudemodell interaktiv. Von Anfang an.
 Managen Sie Ihr 3D-Gebäudemodell interaktiv. Von Anfang an. 1 Kollisionsprüfung (Clash-Detection) Autor: pe Version: 1.5, 2017-04-05 DESITE MD PRO: 2.0 2 1 Kollisionsprüfung Mithilfe der Kollisionsprüfung
Managen Sie Ihr 3D-Gebäudemodell interaktiv. Von Anfang an. 1 Kollisionsprüfung (Clash-Detection) Autor: pe Version: 1.5, 2017-04-05 DESITE MD PRO: 2.0 2 1 Kollisionsprüfung Mithilfe der Kollisionsprüfung
Neue Ansätze für Mustererkennung und automatisches Lernen
 Z Y X Neue Ansätze für Mustererkennung und automatisches Lernen Vortrag im Rahmen des 2. Technologieforums Bildverarbeitung am 03./04. November 2015 Johannes Zügner STEMMER IMAGING GmbH, Puchheim GLIEDERUNG
Z Y X Neue Ansätze für Mustererkennung und automatisches Lernen Vortrag im Rahmen des 2. Technologieforums Bildverarbeitung am 03./04. November 2015 Johannes Zügner STEMMER IMAGING GmbH, Puchheim GLIEDERUNG
Kollisionserkennung Kapitel 12 Collision and Rigid Body Dynamics aus Jason Gregory: Game Engine Architecture. (Seite )
") Universität zu Köln Historisch-Kulturwissenschaftliche Informationsverarbeitung Softwaretechnologie II (Teil 2): Simulation und 3D-Programmierung Sommersemester 2013 Dozent: Prof. Dr. Manfred Thaller Kollisionserkennung
Universität zu Köln Historisch-Kulturwissenschaftliche Informationsverarbeitung Softwaretechnologie II (Teil 2): Simulation und 3D-Programmierung Sommersemester 2013 Dozent: Prof. Dr. Manfred Thaller Kollisionserkennung
Turbinenflansch Vermessung VOITH SIEMENS
 Turbinenflansch Vermessung VOITH SIEMENS Der Sinn der Vermessung lag darin, die aktuellen Positionen der im Bau integrierten Flansche zu ermitteln, um dort vorhandene Abweichungen bei der Fertigung der
Turbinenflansch Vermessung VOITH SIEMENS Der Sinn der Vermessung lag darin, die aktuellen Positionen der im Bau integrierten Flansche zu ermitteln, um dort vorhandene Abweichungen bei der Fertigung der
Hochdurchsatz-Mikroskopie zur automatisierten Qualitätskontrolle
 Hochdurchsatz-Mikroskopie zur automatisierten Qualitätskontrolle Control 2017, Stuttgart 09 Mai 2017 Tobias Piotrowski, M.Sc. Bildquellen: Fraunhofer IPT Einführung Warum High-Speed-Mikroskopie? Herausforderung:
Hochdurchsatz-Mikroskopie zur automatisierten Qualitätskontrolle Control 2017, Stuttgart 09 Mai 2017 Tobias Piotrowski, M.Sc. Bildquellen: Fraunhofer IPT Einführung Warum High-Speed-Mikroskopie? Herausforderung:
Stabilitätsprüfung projizierter Referenzpunkte für die Erfassung großvolumiger Messobjekte
 Stabilitätsprüfung projizierter Referenzpunkte für die Erfassung großvolumiger Messobjekte Murat ÜRÜN, Manfred WIGGENHAGEN, Hubertus NITSCHKE, Christian HEIPKE VWN Hannover, IPI Universität Hannover IPI
Stabilitätsprüfung projizierter Referenzpunkte für die Erfassung großvolumiger Messobjekte Murat ÜRÜN, Manfred WIGGENHAGEN, Hubertus NITSCHKE, Christian HEIPKE VWN Hannover, IPI Universität Hannover IPI
Bildkorrelation zur Validierung der Finite-Elemente-Analyse mit Z88Aurora anhand einer Windkraftflügelstruktur
 Bildkorrelation zur Validierung der Finite-Elemente-Analyse mit ZAurora anhand einer Windkraftflügelstruktur 15. Bayreuther 3D-Konstruktuerstag 1. September 13 Dipl.-Ing. Christoph Wehmann Prof. Dr.-Ing.
Bildkorrelation zur Validierung der Finite-Elemente-Analyse mit ZAurora anhand einer Windkraftflügelstruktur 15. Bayreuther 3D-Konstruktuerstag 1. September 13 Dipl.-Ing. Christoph Wehmann Prof. Dr.-Ing.
H2 1862 mm. H1 1861 mm
 1747 mm 4157 mm H2 1862 mm H1 1861 mm L1 4418 mm L2 4818 mm H2 2280-2389 mm H1 1922-2020 mm L1 4972 mm L2 5339 mm H3 2670-2789 mm H2 2477-2550 mm L2 5531 mm L3 5981 mm L4 6704 mm H1 2176-2219 mm L1 5205
1747 mm 4157 mm H2 1862 mm H1 1861 mm L1 4418 mm L2 4818 mm H2 2280-2389 mm H1 1922-2020 mm L1 4972 mm L2 5339 mm H3 2670-2789 mm H2 2477-2550 mm L2 5531 mm L3 5981 mm L4 6704 mm H1 2176-2219 mm L1 5205
Deformationsmessung von biegeweichen Rohren ein Erfahrungsbericht
 Deformationsmessung von biegeweichen Rohren ein Erfahrungsbericht Die Abschlussuntersuchungen nach dem neuen, im IV. Quartal erscheinenden, Arbeitsblatt DWA-A139 im Entwurf sehen die Prüfung der Rohrverformung
Deformationsmessung von biegeweichen Rohren ein Erfahrungsbericht Die Abschlussuntersuchungen nach dem neuen, im IV. Quartal erscheinenden, Arbeitsblatt DWA-A139 im Entwurf sehen die Prüfung der Rohrverformung
Mathematisch-Naturwissenschaftliche Fakultät I der Humboldt-Universität zu Berlin Institut für Physik Physikalisches Grundpraktikum.
 Mathematisch-Naturwissenschaftliche Fakultät I der Humboldt-Universität zu Berlin Institut für Physik Physikalisches Grundpraktikum Versuchsprotokoll zur Bestimmung der Brennweiten von dünnen Linsen (O)
Mathematisch-Naturwissenschaftliche Fakultät I der Humboldt-Universität zu Berlin Institut für Physik Physikalisches Grundpraktikum Versuchsprotokoll zur Bestimmung der Brennweiten von dünnen Linsen (O)
Machine Vision Objektive
 Machine Vision Objektive 2 Megapixel Objektive 2 MEGAPIXEL OBJEKTIVE 1/2" und 2/3" Die bewährte Serie von 2 Megapixel Objektiven für viele Anwendungsbereiche: Wählen Sie das beste Objektiv für Ihre Anforderung
Machine Vision Objektive 2 Megapixel Objektive 2 MEGAPIXEL OBJEKTIVE 1/2" und 2/3" Die bewährte Serie von 2 Megapixel Objektiven für viele Anwendungsbereiche: Wählen Sie das beste Objektiv für Ihre Anforderung
Exploring Mobility.
 Exploring Mobility »Möglichkeiten für Location- Based Services in komplexen Strukturen und Umgebungen am Beispiel Bluetooth Low Energy «ecom instruments GmbH Dietmar Deppisch Product Manager System Solutions
Exploring Mobility »Möglichkeiten für Location- Based Services in komplexen Strukturen und Umgebungen am Beispiel Bluetooth Low Energy «ecom instruments GmbH Dietmar Deppisch Product Manager System Solutions
3D-BILDVERARBEITUNG VON DER PROBLEMSTELLUNG ZUM ERGEBNIS MAURICE LINGENFELDER, ENTWICKLUNG BILDVERARBEITUNG, STEMMER IMAGING
 3D-BILDVERARBEITUNG VON DER PROBLEMSTELLUNG ZUM ERGEBNIS MAURICE LINGENFELDER, ENTWICKLUNG BILDVERARBEITUNG, STEMMER IMAGING WARUM 3D-BILDVERARBEITUNG? Freiformflächen mit undefinierten Fehlern Tiefe des
3D-BILDVERARBEITUNG VON DER PROBLEMSTELLUNG ZUM ERGEBNIS MAURICE LINGENFELDER, ENTWICKLUNG BILDVERARBEITUNG, STEMMER IMAGING WARUM 3D-BILDVERARBEITUNG? Freiformflächen mit undefinierten Fehlern Tiefe des
2D, 3D Kameratechnik in der Robotik. Jan Fischer
 2D, 3D Kameratechnik in der Robotik Jan Fischer Agenda Firmeninformationen 1x1 der Bildverarbeitung Kompetenzen für erfolgreiches Pick & Place Anwendungsspektrum Kriterien die man bei Pick & Place beachten
2D, 3D Kameratechnik in der Robotik Jan Fischer Agenda Firmeninformationen 1x1 der Bildverarbeitung Kompetenzen für erfolgreiches Pick & Place Anwendungsspektrum Kriterien die man bei Pick & Place beachten
Linien- / Flächenfindung in Bildern der PMD-3D-Kamera. Hochschule für Technik und Wirtschaft Dresden
 Linien- / Flächenfindung in Bildern der PMD-3D-Kamera Angelos Drossos Marius Vopel Christian Lenke Hochschule für Technik und Wirtschaft Dresden Fakultät Informatik / Mathematik Fachgebiet Künstliche Intelligenz
Linien- / Flächenfindung in Bildern der PMD-3D-Kamera Angelos Drossos Marius Vopel Christian Lenke Hochschule für Technik und Wirtschaft Dresden Fakultät Informatik / Mathematik Fachgebiet Künstliche Intelligenz
Spektrale Helligkeitsverteilung einer Leuchtdiode (LED)
") Lehrer-/Dozentenblatt Spektrale Helligkeitsverteilung einer Leuchtdiode (LED) Aufgabe und Material Lehrerinformationen Zusatzinformation Es ist besonders darauf zu achten, dass sich die Versuchsanordnung
Lehrer-/Dozentenblatt Spektrale Helligkeitsverteilung einer Leuchtdiode (LED) Aufgabe und Material Lehrerinformationen Zusatzinformation Es ist besonders darauf zu achten, dass sich die Versuchsanordnung
Lehrstuhl für Datenverarbeitung. Technische Universität München. Leistungskurs C++ Player / Stage
 Leistungskurs C++ Player / Stage Player / Stage / Gazebo Player Netzwerkserver, der ein leistungsfähiges, flexibles Interface zu einer Vielzahl an Sensoren und Aktoren eines Roboters bietet Stage 2D Multi
Leistungskurs C++ Player / Stage Player / Stage / Gazebo Player Netzwerkserver, der ein leistungsfähiges, flexibles Interface zu einer Vielzahl an Sensoren und Aktoren eines Roboters bietet Stage 2D Multi
Introduction to Python. Introduction. First Steps in Python. pseudo random numbers. May 2016
 to to May 2016 to What is Programming? All computers are stupid. All computers are deterministic. You have to tell the computer what to do. You can tell the computer in any (programming) language) you
to to May 2016 to What is Programming? All computers are stupid. All computers are deterministic. You have to tell the computer what to do. You can tell the computer in any (programming) language) you
Structure-from-Motion. Christina Mundhenk Leo Sylvio Rüdian Marcel Kliemannel
 Structure-from-Motion Christina Mundhenk Leo Sylvio Rüdian Marcel Kliemannel Fahrplan Structure-from Motion Workflow mit SIFT & Bundle Adjustment mit SURE Probleme/ Grenzen Technik Metrik und Vergleich
Structure-from-Motion Christina Mundhenk Leo Sylvio Rüdian Marcel Kliemannel Fahrplan Structure-from Motion Workflow mit SIFT & Bundle Adjustment mit SURE Probleme/ Grenzen Technik Metrik und Vergleich
Tim Krämer. Archimetrix - Improved Software Architecture Recovery in the Presence of Design Deficiencies. 08. Mai 2013
 Tim Krämer 7kraemer@informatik.uni-hamburg.de Archimetrix - Improved Software Architecture Recovery in the Presence of Design Deficiencies 08. Mai 2013 Tim Krämer, 7kraemer@informatik.uni-hamburg.de Universität
Tim Krämer 7kraemer@informatik.uni-hamburg.de Archimetrix - Improved Software Architecture Recovery in the Presence of Design Deficiencies 08. Mai 2013 Tim Krämer, 7kraemer@informatik.uni-hamburg.de Universität
Technologie.Transfer.Anwendung. Der Mensch im Fertigungssystem von morgen: Gestensteuerung im industriellen Umfeld. New Technology To Market (NTTM)
") istockphoto/pei Ling Hoo New Technology To Market (NTTM) Technologie.Transfer.Anwendung. Der Mensch im Fertigungssystem von morgen: Gestensteuerung im industriellen Umfeld Lars Schubert Stuttgart, 19.09.2016
istockphoto/pei Ling Hoo New Technology To Market (NTTM) Technologie.Transfer.Anwendung. Der Mensch im Fertigungssystem von morgen: Gestensteuerung im industriellen Umfeld Lars Schubert Stuttgart, 19.09.2016
Venustransit
 Venustransit 8.6.2004 Fotografische Beobachtungen 13.11.2004 Fotografische Beobachtungen Hugo Jost-Hediger 1 Themen Persönliches Ziel Die Vorbeitungen Das Instrument Das Aufnahmeprogramm Die Auswertungen
Venustransit 8.6.2004 Fotografische Beobachtungen 13.11.2004 Fotografische Beobachtungen Hugo Jost-Hediger 1 Themen Persönliches Ziel Die Vorbeitungen Das Instrument Das Aufnahmeprogramm Die Auswertungen
LORENZ MESSTECHNIK GmbH
 07172 /93730-0 USB - Drehmomentsensor mit Konfigurations- und Auswertesoftware DR-3001 Nenndrehmoment von 0,1 N m... 5000 N m Geeignet für den mobilen Einsatz mit Notebook Hohe Messgenauigkeit ab 0,1%
07172 /93730-0 USB - Drehmomentsensor mit Konfigurations- und Auswertesoftware DR-3001 Nenndrehmoment von 0,1 N m... 5000 N m Geeignet für den mobilen Einsatz mit Notebook Hohe Messgenauigkeit ab 0,1%
Ausarbeitung eines Praktikumsversuches zum Design eines 1-Wire-Master-Controllers Falk Niederlein
 Großer Beleg Ausarbeitung eines Praktikumsversuches zum Design eines 1-Wire-Master-Controllers Falk Niederlein Folie 1 Gliederung 1 Allgemein 2 Architektur 3 1-Wire-Protokoll 4 Praktikumsversuch 5 Zusammenfassung
Großer Beleg Ausarbeitung eines Praktikumsversuches zum Design eines 1-Wire-Master-Controllers Falk Niederlein Folie 1 Gliederung 1 Allgemein 2 Architektur 3 1-Wire-Protokoll 4 Praktikumsversuch 5 Zusammenfassung
Deflektometrie Ein Messverfahren für spiegelnde Oberflächen
 Deflektometrie Ein Messverfahren für spiegelnde Oberflächen Dr. Alexander Zimmermann FORWISS Universität Passau Institut für Softwaresysteme in technischen Anwendungen der Informatik 19. Oktober 2017 Gliederung
Deflektometrie Ein Messverfahren für spiegelnde Oberflächen Dr. Alexander Zimmermann FORWISS Universität Passau Institut für Softwaresysteme in technischen Anwendungen der Informatik 19. Oktober 2017 Gliederung
] air luftbildvermessung &
![] air luftbildvermessung &](/thumbs/72/67020073.jpg "] air luftbildvermessung &") luftbildvermessung & analyse Die Welt aus der Vogelperspektive Unmanned Aerial Systems (UAS) im Bereich der Geowissenschaften Matthias Jochner GIS Day 16.11.2016 Persönlicher Hintergrund PhD Studium seit
luftbildvermessung & analyse Die Welt aus der Vogelperspektive Unmanned Aerial Systems (UAS) im Bereich der Geowissenschaften Matthias Jochner GIS Day 16.11.2016 Persönlicher Hintergrund PhD Studium seit
Ortsbestimmung und Ortsmodelle
 Ortsbestimmung und Ortsmodelle Distributed Systems Seminar Thomas Gloor Betreuer: Christian Frank Aufteilung Teil 1: Ortsbestimmung am Beispiel von Place Lab Thomas Gloor Teil 2: Ortsmodelle und ihre Anwendungen
Ortsbestimmung und Ortsmodelle Distributed Systems Seminar Thomas Gloor Betreuer: Christian Frank Aufteilung Teil 1: Ortsbestimmung am Beispiel von Place Lab Thomas Gloor Teil 2: Ortsmodelle und ihre Anwendungen
Scene Reconstruction with Multiple View Geometry
 Scene Reconstruction with Multiple View Geometry Anwendungen 2 16.06.2010 Nikolaus Rusitska nikolausrusitska@gmx.de Inhalt Rückblick Techniken Related Work Fazit 1 Rückblick Techniken Related Work Fazit
Scene Reconstruction with Multiple View Geometry Anwendungen 2 16.06.2010 Nikolaus Rusitska nikolausrusitska@gmx.de Inhalt Rückblick Techniken Related Work Fazit 1 Rückblick Techniken Related Work Fazit
Lehrstuhl für Datenverarbeitung. Technische Universität München. Leistungskurs C++ Subversion / CMake
 Leistungskurs C++ Subversion / CMake Subversion am LDV Repository der Gruppen: https://www2.ldv.ei.tum.de/repos/13cppx Anlegen des Repository: svn checkout https://www2.ldv.ei.tum.de/repos/13cppx cd 13cppX
Leistungskurs C++ Subversion / CMake Subversion am LDV Repository der Gruppen: https://www2.ldv.ei.tum.de/repos/13cppx Anlegen des Repository: svn checkout https://www2.ldv.ei.tum.de/repos/13cppx cd 13cppX
TIVITA Tissue. » High Performance Hyperspectral Imaging Kontinuierliche Echtzeit VIS/NIR Hyperspektrale Kamera. » Datenblatt
 » High Performance Hyperspectral Imaging Kontinuierliche Echtzeit VIS/NIR Hyperspektrale Kamera» Datenblatt www.diaspective-vision.com 1 NICHTINVASIVE ERFASSUNG VON GEWEBEOXYGENIERUNG, NIR-PERFUSION, GEWEBE-
» High Performance Hyperspectral Imaging Kontinuierliche Echtzeit VIS/NIR Hyperspektrale Kamera» Datenblatt www.diaspective-vision.com 1 NICHTINVASIVE ERFASSUNG VON GEWEBEOXYGENIERUNG, NIR-PERFUSION, GEWEBE-
Prof. J. Zhang Universität Hamburg. AB Technische Aspekte Multimodaler Systeme. 13. Januar 2004
 zhang@informatik.uni-hamburg.de Universität Hamburg AB Technische Aspekte Multimodaler Systeme zhang@informatik.uni-hamburg.de Inhaltsverzeichnis Tsai s RAC-basierte Kamerakalibrierung................374
zhang@informatik.uni-hamburg.de Universität Hamburg AB Technische Aspekte Multimodaler Systeme zhang@informatik.uni-hamburg.de Inhaltsverzeichnis Tsai s RAC-basierte Kamerakalibrierung................374
Hochgeschwindigkeits- Bildverarbeitung Einführung
 Einführung Bernhard Mindermann Geschäftsführer der Mikrotron GmbH tel. +49 89 726342 00, www.mikrotron.de, info@mikroton.de Diese Präsentation, Datenblätter und Manuals bei www.mikrotron.de Auf der Vision:
Einführung Bernhard Mindermann Geschäftsführer der Mikrotron GmbH tel. +49 89 726342 00, www.mikrotron.de, info@mikroton.de Diese Präsentation, Datenblätter und Manuals bei www.mikrotron.de Auf der Vision:
Optik in Smartphones. Proseminar Technische Informatik Fabio Becker 9. Juli 2014
 Optik in Smartphones Proseminar Technische Informatik Fabio Becker 9. Juli 2014 1 Gliederung Die Kamera Grundidee für das Smartphone Grundlagen zur Optik Skalierung Aufbau Ziele/Trend in Zukunft Zusammenfassung
Optik in Smartphones Proseminar Technische Informatik Fabio Becker 9. Juli 2014 1 Gliederung Die Kamera Grundidee für das Smartphone Grundlagen zur Optik Skalierung Aufbau Ziele/Trend in Zukunft Zusammenfassung
Laborprojekte (1) Autonome Navigation mit Pioneer
 Autonome Navigation mit Pioneer") Laborprojekte (1) Autonome Navigation mit Pioneer Basis: Differential Drive, Ultraschall, Laser. PC, Kinekt Gut getestet: Kartierung Untersuchung Odometrie (Genauigkeit, Kalibrierung) Verbesserung Kartierung
Laborprojekte (1) Autonome Navigation mit Pioneer Basis: Differential Drive, Ultraschall, Laser. PC, Kinekt Gut getestet: Kartierung Untersuchung Odometrie (Genauigkeit, Kalibrierung) Verbesserung Kartierung
Kameraanbindung mit OpenCV. Projektpraktikum AR/VR Raphael Baumeister
 Kameraanbindung mit OpenCV Projektpraktikum AR/VR Raphael Baumeister Einleitung & Allgemeines Open Source Bibliothek Basierend auf Image Processing Library Programmiersprache C++ Hohe Geschwindigkeit Lizenzfrei
Kameraanbindung mit OpenCV Projektpraktikum AR/VR Raphael Baumeister Einleitung & Allgemeines Open Source Bibliothek Basierend auf Image Processing Library Programmiersprache C++ Hohe Geschwindigkeit Lizenzfrei
Differenzierung von Robotern in Industrie und Service - Probleme der Robotik bei mobilen Systemen -
 Differenzierung von Robotern in Industrie und Service - Probleme der Robotik bei mobilen Systemen - Christoph Schmiedecke Studiendepartment Informatik Hochschule für Angewandte Wissenschaften Hamburg 16.
Differenzierung von Robotern in Industrie und Service - Probleme der Robotik bei mobilen Systemen - Christoph Schmiedecke Studiendepartment Informatik Hochschule für Angewandte Wissenschaften Hamburg 16.
Framework zur Evaluation von Trackingbibliotheken mittels gerenderter Videos von Tracking-Targets
 Framework zur Evaluation von Trackingbibliotheken mittels gerenderter Videos von Tracking-Targets Jonas Diekmann, Patrick Renner, Thies Pfeier Cluster of Excellence Cognitive Interaction Technology, Universität
Framework zur Evaluation von Trackingbibliotheken mittels gerenderter Videos von Tracking-Targets Jonas Diekmann, Patrick Renner, Thies Pfeier Cluster of Excellence Cognitive Interaction Technology, Universität
GIS-basierte topologische Fahrzeuglokalisierung durch LIDAR Kreuzungserkennung
 durch LIDAR Kreuzungserkennung André Müller, Hans-Joachim Wünsche Fakultät für Luft- und Raumfahrttechnik Institut für Technik Autonomer Systeme (TAS) Universität der Bundeswehr München Inhalt - Einleitung
durch LIDAR Kreuzungserkennung André Müller, Hans-Joachim Wünsche Fakultät für Luft- und Raumfahrttechnik Institut für Technik Autonomer Systeme (TAS) Universität der Bundeswehr München Inhalt - Einleitung
TIVITA Tissue System. » High Performance Hyperspectral Imaging Kontinuierliche Echtzeit VIS/NIR Hyperspektrale Kamera.
 TIVITA Tissue System» High Performance Hyperspectral Imaging Kontinuierliche Echtzeit VIS/NIR Hyperspektrale Kamera» Datenblatt www.diaspective-vision.com 1 NICHTINVASIVE ERFASSUNG VON GEWEBEOXYGENIERUNG,
TIVITA Tissue System» High Performance Hyperspectral Imaging Kontinuierliche Echtzeit VIS/NIR Hyperspektrale Kamera» Datenblatt www.diaspective-vision.com 1 NICHTINVASIVE ERFASSUNG VON GEWEBEOXYGENIERUNG,
Anwendung einer Monokularen Kamera als Bewegungs-Sensor für Mobile Roboter p.1
 Anwendung einer Monokularen Kamera als Bewegungs-Sensor für Mobile Roboter Tobias Pietzsch Anwendung einer Monokularen Kamera als Bewegungs-Sensor für Mobile Roboter p.1 Zielstellung Kamera als Sensor
Anwendung einer Monokularen Kamera als Bewegungs-Sensor für Mobile Roboter Tobias Pietzsch Anwendung einer Monokularen Kamera als Bewegungs-Sensor für Mobile Roboter p.1 Zielstellung Kamera als Sensor
Bachelorarbeit Präsentation Clemens Ornetzeder
 Bachelorarbeit Präsentation Clemens Ornetzeder Betreuer: Dr. Florian Reiterer VOLLAUTOMATISIERTE GLUKOSEREGELUNG BEI TYP-2-DIABETIKERN Institut für Design und Regelung Mechatronischer Systeme BACHELORARBEIT
Bachelorarbeit Präsentation Clemens Ornetzeder Betreuer: Dr. Florian Reiterer VOLLAUTOMATISIERTE GLUKOSEREGELUNG BEI TYP-2-DIABETIKERN Institut für Design und Regelung Mechatronischer Systeme BACHELORARBEIT
Stellungnahme zum Artikel LEIVTEC XV3 sind die Messwerte wirklich plausibel? in der ADAC Rechtszeitschrift DAR vom Januar 2014
 Stellungnahme zum Artikel LEIVTEC XV3 sind die Messwerte wirklich plausibel? in der ADAC Rechtszeitschrift DAR vom Januar 2014 Das LEIVTEC XV3 Messverfahren ist im Dokument LEIVTEC XV3, Plausibilitätsprüfung
Stellungnahme zum Artikel LEIVTEC XV3 sind die Messwerte wirklich plausibel? in der ADAC Rechtszeitschrift DAR vom Januar 2014 Das LEIVTEC XV3 Messverfahren ist im Dokument LEIVTEC XV3, Plausibilitätsprüfung
3D Kollisionsvermeidung in Bewegung durch Echtzeitberechnung aller überstrichenen Volumen
 Deutsches Forschungszentrum für Künstliche Intelligenz GmbH 3D Kollisionsvermeidung in Bewegung durch Echtzeitberechnung aller überstrichenen Volumen Holger Täubig Udo Frese (DFKI Bremen) Augsburg, 26.
Deutsches Forschungszentrum für Künstliche Intelligenz GmbH 3D Kollisionsvermeidung in Bewegung durch Echtzeitberechnung aller überstrichenen Volumen Holger Täubig Udo Frese (DFKI Bremen) Augsburg, 26.
Projektarbeiten WiSe 13/14
 Projektarbeiten WiSe 13/14 Fynn Schwiegelshohn, Muhammed Al Kadi, Max Ferger Prof. Dr.-Ing. Michael Hübner, Lehrstuhl für Eingebettete Systeme der Informationstechnik (ESIT) Fakultät für Elektrotechnik
Projektarbeiten WiSe 13/14 Fynn Schwiegelshohn, Muhammed Al Kadi, Max Ferger Prof. Dr.-Ing. Michael Hübner, Lehrstuhl für Eingebettete Systeme der Informationstechnik (ESIT) Fakultät für Elektrotechnik
SiPoS-Rail Differentielles GNSS-Verfahren mit ortsfesten Elementen
 SiPoS-Rail Differentielles GNSS-Verfahren mit ortsfesten Elementen GMA Fachausschuss 7.61, Braunschweig, 14.06.2013 René Rütters, Michael Breuer, Daniel Lüdicke RWTH Aachen Agenda 1 2 3 4 Einführung SiPoS-Rail
SiPoS-Rail Differentielles GNSS-Verfahren mit ortsfesten Elementen GMA Fachausschuss 7.61, Braunschweig, 14.06.2013 René Rütters, Michael Breuer, Daniel Lüdicke RWTH Aachen Agenda 1 2 3 4 Einführung SiPoS-Rail
Entwicklung einer Anwendung für die Microsoft HoloLens
 Entwicklung einer Anwendung für die Microsoft HoloLens Lehrstuhl für Eingebettete Systeme der Informationstechnik (ESIT) Entwicklung einer Anwendung für die Microsoft HoloLens Betreuer: Florian Fricke
Entwicklung einer Anwendung für die Microsoft HoloLens Lehrstuhl für Eingebettete Systeme der Informationstechnik (ESIT) Entwicklung einer Anwendung für die Microsoft HoloLens Betreuer: Florian Fricke
vision & id 3D-MotionKit
 3D-MotionKit Ein fertiges Paket für 3D-Prüfaufgaben: Das 3D-MotionKit macht 3D-Merkmale, wie etwa Höhe, Volumen und Oberflächenschieflage messbar. Darüber hinaus wird das 3D-MotionKit dort eingesetzt,
3D-MotionKit Ein fertiges Paket für 3D-Prüfaufgaben: Das 3D-MotionKit macht 3D-Merkmale, wie etwa Höhe, Volumen und Oberflächenschieflage messbar. Darüber hinaus wird das 3D-MotionKit dort eingesetzt,
LORENZ MESSTECHNIK GmbH
 USB - Drehmomentsensor mit Konfigurationsund Auswertesoftware DR-3000, DR-3000-P von 0,1 N m... 5000 N m Genauigkeitsklasse optional 0,05% v. Endwert Bis zu 2500 Messungen/s pro Messkanal Drehzahl bis
USB - Drehmomentsensor mit Konfigurationsund Auswertesoftware DR-3000, DR-3000-P von 0,1 N m... 5000 N m Genauigkeitsklasse optional 0,05% v. Endwert Bis zu 2500 Messungen/s pro Messkanal Drehzahl bis
Lehrstuhl für Datenverarbeitung. Technische Universität München. Leistungskurs C++ Subversion / CMake
 Leistungskurs C++ Subversion / CMake Subversion am LDV Repository der Gruppen: https://www2.ldv.ei.tum.de/repos/14cppx Anlegen des Repository: svn checkout https://www2.ldv.ei.tum.de/repos/14cppx cd 14cppX
Leistungskurs C++ Subversion / CMake Subversion am LDV Repository der Gruppen: https://www2.ldv.ei.tum.de/repos/14cppx Anlegen des Repository: svn checkout https://www2.ldv.ei.tum.de/repos/14cppx cd 14cppX
Simulink: Softwareentwurf für eingebettete Systeme ROS-Arduino-Interface. von Christian Schildwächter
 Simulink: Softwareentwurf für eingebettete Systeme ROS-Arduino-Interface von Christian Schildwächter Simulink Simulink S-Functions Softwareprojekt ROS-Arduino-Interface Simulink 3 LIVE DEMO 4 External
Simulink: Softwareentwurf für eingebettete Systeme ROS-Arduino-Interface von Christian Schildwächter Simulink Simulink S-Functions Softwareprojekt ROS-Arduino-Interface Simulink 3 LIVE DEMO 4 External
KE und Lernen in Spielen. Jigsaw Puzzle. Prof. Fürnkranz SS Dienstag, 16:15 17:55 Uhr. Manuel Hiemenz 11. Mai 2010
 KE und Lernen in Spielen Prof. Fürnkranz SS 2010 - Dienstag, 16:15 17:55 Uhr Jigsaw Puzzle Manuel Hiemenz 11. Mai 2010 11. Mai 2010 Fachbereich Humanwissenschaften Institut für Sportwissenschaft Manuel
KE und Lernen in Spielen Prof. Fürnkranz SS 2010 - Dienstag, 16:15 17:55 Uhr Jigsaw Puzzle Manuel Hiemenz 11. Mai 2010 11. Mai 2010 Fachbereich Humanwissenschaften Institut für Sportwissenschaft Manuel
Hauptseminar Roboternavigation. Kartenaufbau nach Thrun
 Hauptseminar Roboternavigation Kartenaufbau nach Thrun Hannes Keil keil@in.tum.de 18. Januar 2002 Überblick Kartenaufbau nach Thrun Überblick 1. Einführung in den Kartenbau 2. Einführung in den Aufbau
Hauptseminar Roboternavigation Kartenaufbau nach Thrun Hannes Keil keil@in.tum.de 18. Januar 2002 Überblick Kartenaufbau nach Thrun Überblick 1. Einführung in den Kartenbau 2. Einführung in den Aufbau
Topologieerkennung von Sensornetzwerken
 looz@ira.uka.de Institut für Theoretische Informatik - Algorithmik I 26. Januar 2010 Übersicht Motivation Definitionen Überlegungen Algorithmus Resultate Motivation Definitionen Überlegungen Algorithmus
looz@ira.uka.de Institut für Theoretische Informatik - Algorithmik I 26. Januar 2010 Übersicht Motivation Definitionen Überlegungen Algorithmus Resultate Motivation Definitionen Überlegungen Algorithmus
Fachartikel. Telezentrische Objektive für Kameras größer 1 Zoll
 Vision & Control GmbH Mittelbergstraße 16 98527 Suhl. Germany Telefon: +49 3681 / 79 74-0 Telefax: +49 36 81 / 79 74-33 www.vision-control.com Fachartikel Telezentrische Objektive für Kameras größer 1
Vision & Control GmbH Mittelbergstraße 16 98527 Suhl. Germany Telefon: +49 3681 / 79 74-0 Telefax: +49 36 81 / 79 74-33 www.vision-control.com Fachartikel Telezentrische Objektive für Kameras größer 1
Entwicklung einer robusten Methode zur Berechnung von Stereokorrespondenzen
 Entwicklung einer robusten Methode zur Berechnung von Stereokorrespondenzen Seminar - Wintersemester 2010/2011 Fakultät Technik und Informatik Department Informatik Gregory Föll Übersicht Rückblick Stereo
Entwicklung einer robusten Methode zur Berechnung von Stereokorrespondenzen Seminar - Wintersemester 2010/2011 Fakultät Technik und Informatik Department Informatik Gregory Föll Übersicht Rückblick Stereo
Kinematische Bestandsdatenerfassung mit Laserscannern
 Kinematische Bestandsdatenerfassung mit Laserscannern 3D MAPPING Das Mobile Straßen Erfassungs- System (MoSES) Aufnahme des Straßen- oder Schienenkorridors mit ca. 40 m Breite Erfassung des Raumes mit
Kinematische Bestandsdatenerfassung mit Laserscannern 3D MAPPING Das Mobile Straßen Erfassungs- System (MoSES) Aufnahme des Straßen- oder Schienenkorridors mit ca. 40 m Breite Erfassung des Raumes mit
Gliederung. Kurzvorstellung ITW e.v. Chemnitz. Einsatz optische Mikromesstechnik
 Optische 3D-Messung von Außen- und Innenformen an Miniatur- und Mikroteilen ITW e.v. Chemnitz Neefestraße 88 09116 Chemnitz Tel. (0371) 38 252 0 Fax. (0371) 38 252 10 E-Mail info@itw-chemnitz.de it www.itw-chemnitz.de
Optische 3D-Messung von Außen- und Innenformen an Miniatur- und Mikroteilen ITW e.v. Chemnitz Neefestraße 88 09116 Chemnitz Tel. (0371) 38 252 0 Fax. (0371) 38 252 10 E-Mail info@itw-chemnitz.de it www.itw-chemnitz.de
F. Kathe ROS Folie 1
 F. Kathe ROS Folie 1 F. Kathe ROS Folie 2 ROS Eine Einführung in das Robot Operating System Florian Kathe fkathe@uni-koblenz.de Institut für Computervisualistik Universität Koblenz-Landau 9. November 2012
F. Kathe ROS Folie 1 F. Kathe ROS Folie 2 ROS Eine Einführung in das Robot Operating System Florian Kathe fkathe@uni-koblenz.de Institut für Computervisualistik Universität Koblenz-Landau 9. November 2012
Approximation flächenhaft harmonischer Funktionen mittels bikubisch finiter Elemente
 . Session 6: Theoretische Geodäsie Approximation flächenhaft harmonischer Funktionen mittels bikubisch finiter Elemente 1 Jessica Franken Institut für Geodäsie und Geoinformation Professur für Theoretische
. Session 6: Theoretische Geodäsie Approximation flächenhaft harmonischer Funktionen mittels bikubisch finiter Elemente 1 Jessica Franken Institut für Geodäsie und Geoinformation Professur für Theoretische