Warum z-transformation?
|
|
|
- Moritz Arnold
- vor 6 Jahren
- Abrufe
Transkript
1 -Transformation
2 Warum -Transformation? Die -Transformation führt Polynome und rationale Funktionen in die Analyse der linearen eitdiskreten Systeme ein. Die Faltung geht über in die Multiplikation von Polynomen. Algebraischen Operationen wie Division, Multiplikation und Faktorisierung entsprechen dem Zerlegen bw. Zusammenseten von LTI Systemen. Im allgemeinen sind die -Transformationen rationale Funktionen, d.h. sie bestehen aus einem Zähler- und einem Nennerpolynom. Die Wureln dieser Polynome sind wichtig, da die meisten Eigenschaften digitaler Filter von der Lage dieser Wureln abhängen. -Transformation 2
3 n, ˆ, Bereich n Zeitbereich (Time domain) Impulsantwort, Differenengleichungen, "wirklicher" Signalbereich ˆ Frequenbereich (Frequency domain) Frequenantworten, Spektraldarstellungen Analyse von Tönen Domain Operatoren, Pole und Nullstellen mathematische Analyse und Synthese -Transformation 3
4 Eingangssignale Impuls Komplexe Exponentialfunktion x[n] = n -Transformation 4
5 -Transformation und FIR-Filter M yn [ ] bxn [ k] k k als Filtergleichung oder mit der Faltungssumme yn [ ] xn [ ] hn [ ] hn [ ] b[ nk] Wir verwenden das Signal k n xn [ ] { für alle n}, beliebige (komplexe) Zahl als Eingangssignal M M M M M k yn [ ] bxn k [ k] b k b k b k k k k M M k b k k k H( ) hk [ ] k k n k n k n... Systemfunktion Zur Erinnerung: -Transformation 5 k j ˆ e
6 Die Systemfunktion H( ) ist die Transformation der Impulsantwort: M hn [ ] b[ nk] H( ) b k k k M k k Für das Eingangssignal n yn [ ] hn [ ] H( ) folgt wobei H( ) die Transformierte von hn [ ] ist. n n -Transformation 6
7 hn [ ] H( ) b 1, 2,1 H( ) b b b 12 1 k = Die Systemfunktion ist eine gebrochen rationale Funktion mit dem Zählerpolynom 2 21 und dem Nennerpolynom 2 -Transformation 7
8 Aus der Impulsantwort hn [ ] b[ n] b[ n1] b[ n2] 1 2 wird durch -Transformation die Systemfunktion H( ) b b b b bb -Transformation 8
9 k Darstellung von Signalen Ein Signal endlicher Länge kann dargestellt werden N xn [ ] xk [ ] [ nk] die Transformation dieses Signales ist definiert N X() M M xk [] k k k H( ) b k hk [ ] k k k ist eine beliebige komplexe Zahl, d.h. ist die unabhängige ( komplexe) Variable der -Transformation. Man kann auch schreiben N 1 k ( ) [ ]( ) X xk k was nicht anderes bedeutet, dass X( ) ein Polynom der 1 Ordnung N der Variablen ist!... Systemfunktion -Transformation 9
10 Transformieren Den Übergang von n nennt man die -Transformation von x[n]. Um X [] u erhalten ist es lediglich erforderlich ein Polynom in -1, dessen Koeffiienten die Werte der Folge x[n] sind, u bilden..b.: n n < n > 5 x[n] X( ) Transformation 1
11 ndomain Domain N x[ n] xk [ ] [ nk] X ( ) xk [ ] k k N k x[ n] X ( ) Beispiel: xn [ ] [ nn] X[ ] n o jω = e DFT N j k jωk ω = re x[ k] r e k= DFT von xkr [ ] k -Transformation 11
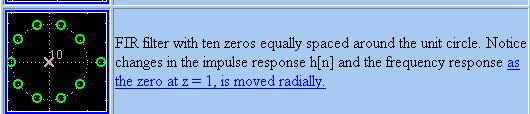
12 Die Systemfunktion H( ) ist eine Funktion der komplexen Variablen. Die Transformation eines FIR-Filters ist ein Polynom M ten Grades und hat daher M Nullstellen, die das Polynom (bis auf eine multiplikative Konstante) vollständig definieren (Fundamentalsat der Algebra). Beispiel: yn [ ] 6 xn [ ] 5 xn [ 1] xn [ 2] H( ) 65 (3 )(2 ) 6 Nullstellen bei und Transformation 12
13 Eigenschaften der -Transformation Linearität ax [ n] bx [ n] ax ( ) bx ( ) Time-delay 1 im von 1 im Bereich entspricht einer Zeitverögerung nbereich (Zeitbereich) n n < n > 5 x[n] X( ) ( ) ( ) Y X = ( ) Transformation 13
14 -Transformation als Operator Unit-Delay Operator D yn [ ] D{ xn [ ]} xn [ 1] n xn [ ] für alle n yn D xn D xn n n1 1 n 1 [ ] { [ ]} { } [ ] xn xn 1 Der Ausdruck [ ] gilt nur für [ ] Es ist allerdings üblich, die Größe 1 [ ] { [ ]} [ 1] -Transformation 14 1 n! alternativ um Unit-Delay Operatorsymbol D u verwenden! yn xn xn
15 x[n] Unit Delay x[n-1] X() -1-1 X() xn [ ] xn [ 1] xn [ 2] xn [ 3] b b1 2 b b yn [ ] -Transformation 15
16 Faltung und -Transformation ndomain Domain yn [ ] hn [ ] xn [ ] Y( ) H( ) X( ) Kaskadieren von Systemen LTI 1 LTI 2 xn [ ] xn [ ] h1[ n] 1 2 h1[ n] h [ n] 2 ( xn [ ] h[ n]) h[ n] hn [ ] h[ n] h[ n] H( ) H( ) H ( ) Transformation 16
17 Beispiel: H( ) Eine Wurel dieses Polynoms liegt bei 1, damit ergibt sich H H H 1 1 ( ) 2( )(1 ) 1( ) ( 1 ) H( ) 12 2 H H1( ) H( ) 1 1 Partitionierung 1 2 H ( ) H ( ) (1 1 ) 1 -Transformation 17
18 -Bereich ωˆ -Bereich M M k ˆ k ω) k = k = H( ) = b H( = b k e j ˆ ωk = e j ˆ ω... Einheitskreis in der komplexen Ebene -Transformation 18
19 .B.: Pole und Nullstellen H( ) j j (1 )(1 e )(1 e ) 3 2 j j e e ( 1)( )( ) 3 3 ο xxx ο ο dreifach im Nullpunkt -Transformation 19
20 Was bedeutet eine Nullstelle? yn [] xn [] 2[ xn1] 2[ xn2] xn [ 3] xn [ ] e j n 3 j j j j n n1 n2 n yn [ ] e 2e 2e e j n j j2 3 j e (12e 2 e e ) j n 3 e 1 1 j 3 1 j 3 1 Die komplexen Eingangsgrößen n n j n n n 3 3 ( ) 1, ( ) e, ( ) e werden unterdrückt! j -Transformation 2
21 Nulling Filter (Sperrfilter) Nullstellen in der Ebene "entfernen" Signale der Form xn [ ]. n Um ein Kosinussignal cos( ˆ n) e e 1 jˆn 1 jˆn 2 2 u entfernen müssen wei Eingangsgrößen entfernt werden! Die Nullstellen liegen konjugiert komplex! -Transformation 21
22 PN-Video -Transformation 22
 -Transformation 1 9 23 k 1")
23 L1 L1 j2k k L 1 ( ) (1 ) H e k 9 k1 1-point running average L k H( ) -Transformation k 1 ( 1)
24 H( ) = = Imaginary Part B = [ ] A = [1] plane(b,a) Magnitude Response Real Part 4 Magnitude jπ /3 jπ / = ( 1)( e )( e ) = = 1, ± e jπ /3 -Transformation Normalied Frequency ( π rad/sample)
25 lin log Magnitude Response Magnitude Response (db) Magnitude 3 Magnitude (db) Normalied Frequency ( π rad/sample) Normalied Frequency ( π rad/sample) -Transformation 25
26 Inverse Filterung (1) Ausgangssignal bekannt Kanal Kanal bekannt Eingangssignal gesucht yn [ ] = hn [ ] xn [ ] xn [ ] =? Inverse Faltung Deconvolution -Transformation 26
27 Inverse Filterung (2) Lösung im Zeitbereich schwer/nicht möglich Lösung im -Bereich Y( ) = H ( ) H 1 2( ) X( ) = H( ) X( ) Kanal Korrektur H( H ) ( ) = 1 H( ) = H ( ) 1 -Transformation 27
28 Inverse Filterung (3) H 1 2 1( ) = (1 +.5 ) 1 1 H 2() = = 1 2 H 1( ) (1 +.5 ) Imaginary Part Real Part 2 Nullstellen in Nenner (außerhalb von Null) Polstellen -Transformation 28
29 Pole/Zero Plot 1 Imaginary Part H( ) = Real Part PN-Diagramm H() Impulsantwort 2 1 Impulse Response -1 Amplitude Re Im -Transformation Samples

30 H( ) = π Imaginary Part Transformation Real Part
In diesem Kapitel werden wir eine weitere Klasse von diskreten Filtern kennen lernen, die Infinite Impulse Response Filter.
 Kapitel IIR-Filter In diesem Kapitel werden wir eine weitere Klasse von diskreten Filtern kennen lernen, die Infinite Impulse Response Filter.. Vom FIR- zum IIR-Filter FIR Filter verwenden zur Berechnung
Kapitel IIR-Filter In diesem Kapitel werden wir eine weitere Klasse von diskreten Filtern kennen lernen, die Infinite Impulse Response Filter.. Vom FIR- zum IIR-Filter FIR Filter verwenden zur Berechnung
Zeitdiskrete Signalverarbeitung
 Zeitdiskrete Signalverarbeitung Ideale digitale Filter Dr.-Ing. Jörg Schmalenströer Fachgebiet Nachrichtentechnik - Universität Paderborn Prof. Dr.-Ing. Reinhold Haeb-Umbach 7. September 217 Übersicht
Zeitdiskrete Signalverarbeitung Ideale digitale Filter Dr.-Ing. Jörg Schmalenströer Fachgebiet Nachrichtentechnik - Universität Paderborn Prof. Dr.-Ing. Reinhold Haeb-Umbach 7. September 217 Übersicht
x[n-1] x[n] x[n+1] y[n-1] y[n+1]
![x[n-1] x[n] x[n+1] y[n-1] y[n+1]](/thumbs/72/67333121.jpg "x[n-1] x[n] x[n+1] y[n-1] y[n+1]") Systeme System Funtion f, die ein Eingangssignal x in ein Ausgangssignal y überführt. zeitdisretes System Ein- und Ausgangssignal sind nur für disrete Zeitpunte definiert y[n] = f (.., x[n-1], x[n], x[n+1],
Systeme System Funtion f, die ein Eingangssignal x in ein Ausgangssignal y überführt. zeitdisretes System Ein- und Ausgangssignal sind nur für disrete Zeitpunte definiert y[n] = f (.., x[n-1], x[n], x[n+1],
Die rechnerisch aufwendige Operation der Faltung geht über in die Multiplikation.
 Kapitel Die z-transformation In den Abschnitten über die Impulsantwort und den Frequenzgang haben wir die Antwort eines Systems auf den Einheitspuls und die komplexe Exponentialfunktion ermittelt. Das
Kapitel Die z-transformation In den Abschnitten über die Impulsantwort und den Frequenzgang haben wir die Antwort eines Systems auf den Einheitspuls und die komplexe Exponentialfunktion ermittelt. Das
Einführung in die Digitale Verarbeitung Prof. Dr. Stefan Weinzierl
 Einführung in die Digitale Verarbeitung Prof. Dr. Stefan Weinierl WS11/12 Musterlösung 6. Aufgabenblatt Analyse von LTI-Systemen. 1. Betrachten Sie ein stabiles lineares eitinvariantes System mit der Eingangsfolge
Einführung in die Digitale Verarbeitung Prof. Dr. Stefan Weinierl WS11/12 Musterlösung 6. Aufgabenblatt Analyse von LTI-Systemen. 1. Betrachten Sie ein stabiles lineares eitinvariantes System mit der Eingangsfolge
SSYLB2 SS06 Daniel Schrenk, Andreas Unterweger Übung 8. Laborprotokoll SSY. Diskrete Systeme II: Stabilitätsbetrachtungen und Systemantwort
 SSYLB SS6 Daniel Schrenk, Andreas Unterweger Übung 8 Laborprotokoll SSY Diskrete Systeme II: Stabilitätsbetrachtungen und Systemantwort Daniel Schrenk, Andreas Unterweger, ITS 4 SSYLB SS6 Daniel Schrenk,
SSYLB SS6 Daniel Schrenk, Andreas Unterweger Übung 8 Laborprotokoll SSY Diskrete Systeme II: Stabilitätsbetrachtungen und Systemantwort Daniel Schrenk, Andreas Unterweger, ITS 4 SSYLB SS6 Daniel Schrenk,
Kapitel III Ringe und Körper
 Kapitel III Ringe und Körper 1. Definitionen und Beispiele Definition 117 Eine Algebra A = S,,, 0, 1 mit zwei zweistelligen Operatoren und heißt ein Ring, falls R1. S,, 0 eine abelsche Gruppe mit neutralem
Kapitel III Ringe und Körper 1. Definitionen und Beispiele Definition 117 Eine Algebra A = S,,, 0, 1 mit zwei zweistelligen Operatoren und heißt ein Ring, falls R1. S,, 0 eine abelsche Gruppe mit neutralem
Übung 6: Analyse LTD-Systeme
 ZHAW, DSV, FS2009, Übung 6: Analyse LTD-Systeme Aufgabe : Pol-Nullstellendarstellung, UTF und Differenzengleichung. Die folgenden Pol-Nullstellen-Darstellungen charakterisieren verschiedene LTD- Systeme,
ZHAW, DSV, FS2009, Übung 6: Analyse LTD-Systeme Aufgabe : Pol-Nullstellendarstellung, UTF und Differenzengleichung. Die folgenden Pol-Nullstellen-Darstellungen charakterisieren verschiedene LTD- Systeme,
Diskontinuierliche Signale und Systeme
 Diskontinuierliche Signale und Systeme Fourier-Transformation für diskontinuierliche Funktionen Eigenschaften und Sätze, Fourier-Paare Diskrete Fourier-Transformation (DFT) Zeitdiskrete LTI-Systeme, Faltung
Diskontinuierliche Signale und Systeme Fourier-Transformation für diskontinuierliche Funktionen Eigenschaften und Sätze, Fourier-Paare Diskrete Fourier-Transformation (DFT) Zeitdiskrete LTI-Systeme, Faltung
Klausur im Lehrgebiet. Signale und Systeme. - Prof. Dr.-Ing. Thomas Sikora - Name:... Bachelor ET Master TI Vorname:... Diplom KW Magister...
 Signale und Systeme - Prof. Dr.-Ing. Thomas Sikora - Name:............................ Bachelor ET Master TI Vorname:......................... Diplom KW Magister.............. Matr.Nr:..........................
Signale und Systeme - Prof. Dr.-Ing. Thomas Sikora - Name:............................ Bachelor ET Master TI Vorname:......................... Diplom KW Magister.............. Matr.Nr:..........................
Entwurf von FIR-Filtern
 Kapitel Entwurf von FIR-Filtern. Einleitung.. Darstellung von FIR-Filtern im Zeitbereich y[n] = b x[n] + b x[n ] + b 2 x[n 2] +... + b L x[n (L )] = L b k x[n k] k= = b T x b = [b, b,..., b L ] x = {x[n],
Kapitel Entwurf von FIR-Filtern. Einleitung.. Darstellung von FIR-Filtern im Zeitbereich y[n] = b x[n] + b x[n ] + b 2 x[n 2] +... + b L x[n (L )] = L b k x[n k] k= = b T x b = [b, b,..., b L ] x = {x[n],
Prüfungsklausur Digitale Signalverarbeitung Ergebnis der Klausur
 Fakultät für Mathematik und Informatik Elektronische Schaltungen 58084 Hagen 02331 987 1166 Prüfungsklausur Digitale Signalverarbeitung 21411 Datum: 19. März 2011 (Bearbeitungszeit 120 Minuten, 6 Blätter)
Fakultät für Mathematik und Informatik Elektronische Schaltungen 58084 Hagen 02331 987 1166 Prüfungsklausur Digitale Signalverarbeitung 21411 Datum: 19. März 2011 (Bearbeitungszeit 120 Minuten, 6 Blätter)
Seminar Digitale Signalverarbeitung Thema: Digitale Filter
 Seminar Digitale Signalverarbeitung Thema: Digitale Filter Autor: Daniel Arnold Universität Koblenz-Landau, August 2005 Inhaltsverzeichnis i 1 Einführung 1.1 Allgemeine Informationen Digitale Filter sind
Seminar Digitale Signalverarbeitung Thema: Digitale Filter Autor: Daniel Arnold Universität Koblenz-Landau, August 2005 Inhaltsverzeichnis i 1 Einführung 1.1 Allgemeine Informationen Digitale Filter sind
,Faltung. Heavisidefunktion σ (t), Diracimpuls δ (t) Anwendungen. 1) Rechteckimpuls. 2) Sprungfunktionen. 3) Schaltvorgänge
, Diracimpuls δ (t) Anwendungen. 1) Rechteckimpuls. 2) Sprungfunktionen. 3) Schaltvorgänge") Heavisidefunktion σ (t), Diracimpuls δ (t),faltung Definition Heavisidefunktion, t > 0 σ ( t) = 0, t < 0 Anwendungen ) Rechteckimpuls, t < T r( t) = = σ ( t + T ) σ ( t T ) 0, t > T 2) Sprungfunktionen,
Heavisidefunktion σ (t), Diracimpuls δ (t),faltung Definition Heavisidefunktion, t > 0 σ ( t) = 0, t < 0 Anwendungen ) Rechteckimpuls, t < T r( t) = = σ ( t + T ) σ ( t T ) 0, t > T 2) Sprungfunktionen,
, a n 2. p(x) = a n x n + a n 1. x n a 2 x 2 + a 1 x + a 0. reelles Polynom in der Variablen x vom Grad n. Man schreibt deg p(x) = n
 = a n x n + a n 1. x n a 2 x 2 + a 1 x + a 0. reelles Polynom in der Variablen x vom Grad n. Man schreibt deg p(x) = n") . Graphen gebrochen rationaler Funktionen ==================================================================. Verhalten in der Umgebung der Definitionslücken ------------------------------------------------------------------------------------------------------------------
. Graphen gebrochen rationaler Funktionen ==================================================================. Verhalten in der Umgebung der Definitionslücken ------------------------------------------------------------------------------------------------------------------
Algebra. Roger Burkhardt Fachhochschule Nordwestschweiz Hochschule für Technik Institut für Geistes- und Naturwissenschaft
 Algebra Roger Burkhardt roger.burkhardt@fhnw.ch Fachhochschule Nordwestschweiz Hochschule für Technik Institut für Geistes- und Naturwissenschaft FS 2010 Roger Burkhardt roger.burkhardt@fhnw.ch Algebra
Algebra Roger Burkhardt roger.burkhardt@fhnw.ch Fachhochschule Nordwestschweiz Hochschule für Technik Institut für Geistes- und Naturwissenschaft FS 2010 Roger Burkhardt roger.burkhardt@fhnw.ch Algebra
Einführung in die digitale Signalverarbeitung WS11/12
 Einführung in die digitale Signalverarbeitung WS11/12 Prof. Dr. Stefan Weinzierl usterlösung 1. Aufgabenblatt 1. Digitale Filter 1.1 Was ist ein digitales Filter und zu welchen Zwecken wird die Filterung
Einführung in die digitale Signalverarbeitung WS11/12 Prof. Dr. Stefan Weinzierl usterlösung 1. Aufgabenblatt 1. Digitale Filter 1.1 Was ist ein digitales Filter und zu welchen Zwecken wird die Filterung
Mathematik, Signale und moderne Kommunikation
 Natur ab 4 - PH Baden Mathematik, Signale und moderne Kommunikation 1 monika.doerfler@univie.ac.at 29.4.2009 1 NuHAG, Universität Wien monika.doerfler@univie.ac.at Mathematik, Signale und moderne Kommunikation
Natur ab 4 - PH Baden Mathematik, Signale und moderne Kommunikation 1 monika.doerfler@univie.ac.at 29.4.2009 1 NuHAG, Universität Wien monika.doerfler@univie.ac.at Mathematik, Signale und moderne Kommunikation
filter Filter Ziele Parameter Entwurf
 1 Filter Ziele Parameter Entwurf 2.3.2007 2 Beschreibung Pol-Nullstellen- Diagramm Übertragungsfunktion H(z) Differenzengleichung y(n) Impulsantwort h(n): Finite Impulse Response (FIR) Infinite Impulse
1 Filter Ziele Parameter Entwurf 2.3.2007 2 Beschreibung Pol-Nullstellen- Diagramm Übertragungsfunktion H(z) Differenzengleichung y(n) Impulsantwort h(n): Finite Impulse Response (FIR) Infinite Impulse
Filterentwurf. Bernd Edler Laboratorium für Informationstechnologie DigSig - Teil 11
 Filterentwurf IIR-Filter Beispiele für die verschiedenen Filtertypen FIR-Filter Entwurf mit inv. Fouriertransformation und Fensterfunktion Filter mit Tschebyscheff-Verhalten Vorgehensweise bei Matlab /
Filterentwurf IIR-Filter Beispiele für die verschiedenen Filtertypen FIR-Filter Entwurf mit inv. Fouriertransformation und Fensterfunktion Filter mit Tschebyscheff-Verhalten Vorgehensweise bei Matlab /
Einführung in die Systemtheorie
 Bernd Girod, Rudolf Rabenstein, Alexander Stenger Einführung in die Systemtheorie Signale und Systeme in der Elektrotechnik und Informationstechnik 4., durchgesehene und aktualisierte Auflage Mit 388 Abbildungen
Bernd Girod, Rudolf Rabenstein, Alexander Stenger Einführung in die Systemtheorie Signale und Systeme in der Elektrotechnik und Informationstechnik 4., durchgesehene und aktualisierte Auflage Mit 388 Abbildungen
5. Fourier-Transformation
 Fragestellungen: 5. Fourier-Transformation Bei Anregung mit einer harmonischen Last kann quasistatitisch gerechnet werden, wenn die Erregerfrequenz kleiner als etwa 30% der Resonanzfrequenz ist. Wann darf
Fragestellungen: 5. Fourier-Transformation Bei Anregung mit einer harmonischen Last kann quasistatitisch gerechnet werden, wenn die Erregerfrequenz kleiner als etwa 30% der Resonanzfrequenz ist. Wann darf
Faktorisierung von Polynomen
 Faktorisierung von Polynomen Ein Polynom p vom Grad n besitzt, einschließlich Vielfachheiten, genau n komplexe Nullstellen z k und lässt sich somit als Produkt der entsprechenden Linearfaktoren schreiben:
Faktorisierung von Polynomen Ein Polynom p vom Grad n besitzt, einschließlich Vielfachheiten, genau n komplexe Nullstellen z k und lässt sich somit als Produkt der entsprechenden Linearfaktoren schreiben:
Zahlen und elementares Rechnen
 und elementares Rechnen Christian Serpé Universität Münster 7. September 2011 Christian Serpé (Universität Münster) und elementares Rechnen 7. September 2011 1 / 51 Gliederung 1 2 Elementares Rechnen 3
und elementares Rechnen Christian Serpé Universität Münster 7. September 2011 Christian Serpé (Universität Münster) und elementares Rechnen 7. September 2011 1 / 51 Gliederung 1 2 Elementares Rechnen 3
Vorteile digitaler Filter
 Digitale Filter Vorteile digitaler Filter DF haben Eigenschaften, die mit analogen Filtern nicht realisiert werden können (z.b. lineare Phase). DF sind unabhängig von der Betriebsumgebung (z.b. Temperatur)
Digitale Filter Vorteile digitaler Filter DF haben Eigenschaften, die mit analogen Filtern nicht realisiert werden können (z.b. lineare Phase). DF sind unabhängig von der Betriebsumgebung (z.b. Temperatur)
Funktionen. Mathematik-Repetitorium
 Funktionen 4.1 Funktionen einer reellen Veränderlichen 4.2 Eigenschaften von Funktionen 4.3 Die elementaren Funktionen 4.4 Grenzwerte von Funktionen, Stetigkeit Funktionen 1 4. Funktionen Funktionen 2
Funktionen 4.1 Funktionen einer reellen Veränderlichen 4.2 Eigenschaften von Funktionen 4.3 Die elementaren Funktionen 4.4 Grenzwerte von Funktionen, Stetigkeit Funktionen 1 4. Funktionen Funktionen 2
Fourierreihen periodischer Funktionen
 Fourierreihen periodischer Funktionen periodische Funktion: (3.1) Fourierkoeffizienten und (3.2) (3.3) Fourier-Reihenentwicklungen Cosinus-Reihe: (3.4) (3.5) Exponentialreihe: (3.6) (3.7-3.8) Bestimmung
Fourierreihen periodischer Funktionen periodische Funktion: (3.1) Fourierkoeffizienten und (3.2) (3.3) Fourier-Reihenentwicklungen Cosinus-Reihe: (3.4) (3.5) Exponentialreihe: (3.6) (3.7-3.8) Bestimmung
Stefan Ruzika. 24. April 2016
 Stefan Ruzika Mathematisches Institut Universität Koblenz-Landau Campus Koblenz 24. April 2016 Stefan Ruzika 2: Körper 24. April 2016 1 / 21 Gliederung 1 1 Schulstoff 2 Körper Definition eines Körpers
Stefan Ruzika Mathematisches Institut Universität Koblenz-Landau Campus Koblenz 24. April 2016 Stefan Ruzika 2: Körper 24. April 2016 1 / 21 Gliederung 1 1 Schulstoff 2 Körper Definition eines Körpers
Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme. Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik
![Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme. Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik](/thumbs/69/59889032.jpg "Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme. Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik") Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik Sommersemester 2005 Inhaltsverzeichnis Inhalt Inhaltsverzeichnis 3 Zeitkontinuierliche
Nachrichtentechnik [NAT] Kapitel 3: Zeitkontinuierliche Systeme Dipl.-Ing. Udo Ahlvers HAW Hamburg, FB Medientechnik Sommersemester 2005 Inhaltsverzeichnis Inhalt Inhaltsverzeichnis 3 Zeitkontinuierliche
Signale und Systeme. A1 A2 A3 Summe
 Signale und Systeme - Prof. Dr.-Ing. Thomas Sikora - Name:............................... Vorname:.......................... Matr.Nr:.............................. Ergebnis im Web mit verkürzter Matr.Nr?
Signale und Systeme - Prof. Dr.-Ing. Thomas Sikora - Name:............................... Vorname:.......................... Matr.Nr:.............................. Ergebnis im Web mit verkürzter Matr.Nr?
Übungseinheit 3. FIR und IIR Filter
 Übungseinheit 3 FIR und IIR Filter In dieser Übungseinheit sollen verschiedene Effekte mittels FIR (finite impulse response) und IIR (infinite impulse response) Filter implementiert werden. FIR Filter
Übungseinheit 3 FIR und IIR Filter In dieser Übungseinheit sollen verschiedene Effekte mittels FIR (finite impulse response) und IIR (infinite impulse response) Filter implementiert werden. FIR Filter
ZHAW, DSV1, FS2010, Rumc, 1. H(z) a) Zeichnen Sie direkt auf das Aufgabenblatt das Betragsspektrum an der Stelle 1.
 a) Zeichnen Sie direkt auf das Aufgabenblatt das Betragsspektrum an der Stelle 1.") ZHAW, DSV, FS200, Rumc, DSV Modulprüfung 7 + 4 + 5 + 8 + 6 = 30 Punkte Name: Vorname: : 2: 3: 4: 5: Punkte: Note: Aufgabe : AD-DA-Umsetzung. + + +.5 +.5 + = 7 Punkte Betrachten Sie das folgende digitale
ZHAW, DSV, FS200, Rumc, DSV Modulprüfung 7 + 4 + 5 + 8 + 6 = 30 Punkte Name: Vorname: : 2: 3: 4: 5: Punkte: Note: Aufgabe : AD-DA-Umsetzung. + + +.5 +.5 + = 7 Punkte Betrachten Sie das folgende digitale
Digital Signal Processing
 - for Master Study by TFH Bochum - Analog Signal I OO O I I I O O O Digital Signal Seite 1 Zielsetzung der Signalverarbeitung Analyse: H(t), H(f) Modellieren y(t) {} Physikalische Größe und Prozesse Synthese
- for Master Study by TFH Bochum - Analog Signal I OO O I I I O O O Digital Signal Seite 1 Zielsetzung der Signalverarbeitung Analyse: H(t), H(f) Modellieren y(t) {} Physikalische Größe und Prozesse Synthese
Tontechnik 2. Digitale Filter. Digitale Filter. Zuordnung diskrete digitale Signale neue diskrete digitale Signale
 Tontechnik 2 Digitale Filter Audiovisuelle Medien HdM Stuttgart Digitale Filter Zuordnung diskrete digitale Signale neue diskrete digitale Signale lineares, zeitinvariantes, diskretes System (LTD-System)
Tontechnik 2 Digitale Filter Audiovisuelle Medien HdM Stuttgart Digitale Filter Zuordnung diskrete digitale Signale neue diskrete digitale Signale lineares, zeitinvariantes, diskretes System (LTD-System)
(Bitte geben Sie bei der Beantwortung von Fragen eine Begründung bzw. bei der Lösung von Kurzaufgaben eine kurze Berechnung an!)
") Teil 1: Fragen und Kurzaufgaben (Bitte geben Sie bei der Beantwortung von Fragen eine Begründung bzw. bei der Lösung von Kurzaufgaben eine kurze Berechnung an!) Frage 1 (6 Punkte) Es wird ein analoges
Teil 1: Fragen und Kurzaufgaben (Bitte geben Sie bei der Beantwortung von Fragen eine Begründung bzw. bei der Lösung von Kurzaufgaben eine kurze Berechnung an!) Frage 1 (6 Punkte) Es wird ein analoges
Fahrzeugmechatronik Masterstudiengang M 3.2 Sensoren und Aktoren Labor für Automatisierung und Dynamik AuD FB 03MB
 Abb. 6 Dreidimensionale Darstellung des Frequenzgangs G ATP () s, Achsteilungen s 2 π in Hz Prof. Dr. Höcht 1/29 18.06.2006 11:13 Z_ Abb. 7 Einfluß des Pols bei s imaginären Achse, Achsteilungen in Hz
Abb. 6 Dreidimensionale Darstellung des Frequenzgangs G ATP () s, Achsteilungen s 2 π in Hz Prof. Dr. Höcht 1/29 18.06.2006 11:13 Z_ Abb. 7 Einfluß des Pols bei s imaginären Achse, Achsteilungen in Hz
Kontrollfragen zum Skript Teil 1 beantwortet
 Kontrollfragen zum Skript Teil 1 beantwortet Von J.S. Hussmann Fragen zu SW 1.1 Welche Vorteile hat die DSVB? Programmierbar Parametrierbar Reproduzierbar Wie heisst die Umwandlung eines Zeit-diskreten
Kontrollfragen zum Skript Teil 1 beantwortet Von J.S. Hussmann Fragen zu SW 1.1 Welche Vorteile hat die DSVB? Programmierbar Parametrierbar Reproduzierbar Wie heisst die Umwandlung eines Zeit-diskreten
Die inverse Diskrete Fourier Transformation
 Die inverse Diskrete Fourier Transformation Konvertierung von der Point-value Form in Koeffizientenform. Dazu stellen wir die DFT als Matrix-Vektor Produkt dar 1 1 1... 1 1 ω n ωn 2... ωn n 1 a 0 y 0 1
Die inverse Diskrete Fourier Transformation Konvertierung von der Point-value Form in Koeffizientenform. Dazu stellen wir die DFT als Matrix-Vektor Produkt dar 1 1 1... 1 1 ω n ωn 2... ωn n 1 a 0 y 0 1
F u n k t i o n e n Rationale Funktionen
 F u n k t i o n e n Rationale Funktionen Die erste urkundlich erwähnte Rechenmaschine wurde 163 von Wilhelm Schickard in einem Brief an Johannes Kepler knapp beschrieben. Die Maschine besteht aus einem
F u n k t i o n e n Rationale Funktionen Die erste urkundlich erwähnte Rechenmaschine wurde 163 von Wilhelm Schickard in einem Brief an Johannes Kepler knapp beschrieben. Die Maschine besteht aus einem
Lösungen der Übungsaufgaben zur Vorlesung Digitale Signalverarbeitung
 Institut für Informationsverarbeitung Laboratorium für Informationstechnologie Lösungen der Übungsaufgaben zur Vorlesung Digitale Signalverarbeitung Wintersemester 009-00 Aufgabe : Diskrete Faltung Vorerst:
Institut für Informationsverarbeitung Laboratorium für Informationstechnologie Lösungen der Übungsaufgaben zur Vorlesung Digitale Signalverarbeitung Wintersemester 009-00 Aufgabe : Diskrete Faltung Vorerst:
Partialbruchzerlegung
 Partialbruchzerlegung Eine rationale Funktion r mit n verschiedenen Polstellen z j der Ordnung m j, r = p q, lässt sich in der Form r(z) = f (z) + n j=1 q(z) = c(z z 1) m1 (z z n ) mn r j (z), r j (z)
Partialbruchzerlegung Eine rationale Funktion r mit n verschiedenen Polstellen z j der Ordnung m j, r = p q, lässt sich in der Form r(z) = f (z) + n j=1 q(z) = c(z z 1) m1 (z z n ) mn r j (z), r j (z)
Signale und Systeme I
 FACULTY OF ENGNEERING CHRISTIAN-ALBRECHTS-UNIVERSITÄT ZU KIEL DIGITAL SIGNAL PROCESSING AND SYSTEM THEORY DSS Signale und Systeme I Musterlösung zur Modulklausur WS 010/011 Prüfer: Prof. Dr.-Ing. Gerhard
FACULTY OF ENGNEERING CHRISTIAN-ALBRECHTS-UNIVERSITÄT ZU KIEL DIGITAL SIGNAL PROCESSING AND SYSTEM THEORY DSS Signale und Systeme I Musterlösung zur Modulklausur WS 010/011 Prüfer: Prof. Dr.-Ing. Gerhard
Dieses Kapitel widmet sich den komplexen Zahlen. Die in den folgenden Kapiteln dargestellten Themen können damit
 Komplexe Zahlen Dieses Kapitel widmet sich den komplexen Zahlen. Die in den folgenden Kapiteln dargestellten Themen können damit komplex gelesen werden. Allerdings ist diese Sichtweise nicht unbedingt
Komplexe Zahlen Dieses Kapitel widmet sich den komplexen Zahlen. Die in den folgenden Kapiteln dargestellten Themen können damit komplex gelesen werden. Allerdings ist diese Sichtweise nicht unbedingt
Mathe- Multiple-Choice-Test für Wirtschaftsinformatiker
 REELLE FUNKTIONEN 1 Was muss aufgeführt werden, wenn man eine reelle Funktion angibt? a) Ihre Funktionsvorschrift und ihren Wertebereich. Ihre Funktionsvorschrift und ihren Definitionsbereich. c) Den Wertebereich
REELLE FUNKTIONEN 1 Was muss aufgeführt werden, wenn man eine reelle Funktion angibt? a) Ihre Funktionsvorschrift und ihren Wertebereich. Ihre Funktionsvorschrift und ihren Definitionsbereich. c) Den Wertebereich
Algebraische Gleichungen. Martin Brehm February 2, 2007
 Algebraische Gleichungen Martin Brehm February, 007 1. Der Begriff Algebra Algebraische Gleichungen Durch das herauskristalisieren von mehreren Teilgebieten der Algebra ist es schwer geworden eine einheitliche
Algebraische Gleichungen Martin Brehm February, 007 1. Der Begriff Algebra Algebraische Gleichungen Durch das herauskristalisieren von mehreren Teilgebieten der Algebra ist es schwer geworden eine einheitliche
Mathematik für Ökonomen Kompakter Einstieg für Bachelorstudierende Lösungen der Aufgaben aus Kapitel 5 Version 1.0 (11.
 Mathematik für Ökonomen Kompakter Einstieg für Bachelorstudierende Lösungen der Aufgaben aus Kapitel 5 Version.0. September 05) E. Cramer, U. Kamps, M. Kateri, M. Burkschat 05 Cramer, Kamps, Kateri, Burkschat
Mathematik für Ökonomen Kompakter Einstieg für Bachelorstudierende Lösungen der Aufgaben aus Kapitel 5 Version.0. September 05) E. Cramer, U. Kamps, M. Kateri, M. Burkschat 05 Cramer, Kamps, Kateri, Burkschat
Probleme zu Kap. 5 des Buches. Systemtheorie ohne Ballast
 Anhang C Probleme zu Kap. 5 des Buches Systemtheorie ohne Ballast Überblick Nr. Problem Stand Feb. 20 P5. Anregung eines stabilen Faltungs Systems mit einem abklingenden Eingangssignal P5.2 Hintereinanderschaltung
Anhang C Probleme zu Kap. 5 des Buches Systemtheorie ohne Ballast Überblick Nr. Problem Stand Feb. 20 P5. Anregung eines stabilen Faltungs Systems mit einem abklingenden Eingangssignal P5.2 Hintereinanderschaltung
Betrachtetes Systemmodell
 Betrachtetes Systemmodell Wir betrachten ein lineares zeitinvariantes System mit der Impulsantwort h(t), an dessen Eingang das Signal x(t) anliegt. Das Ausgangssignal y(t) ergibt sich dann als das Faltungsprodukt
Betrachtetes Systemmodell Wir betrachten ein lineares zeitinvariantes System mit der Impulsantwort h(t), an dessen Eingang das Signal x(t) anliegt. Das Ausgangssignal y(t) ergibt sich dann als das Faltungsprodukt
Einführung in die digitale Signalverarbeitung WS11/12
 Einführung in die digitale Signalverarbeitung WS11/12 Prof. Dr. Stefan Weinzierl Musterlösung 11. Aufgabenblatt 1. IIR-Filter 1.1 Laden Sie in Matlab eine Audiodatei mit Sampling-Frequenz von fs = 44100
Einführung in die digitale Signalverarbeitung WS11/12 Prof. Dr. Stefan Weinzierl Musterlösung 11. Aufgabenblatt 1. IIR-Filter 1.1 Laden Sie in Matlab eine Audiodatei mit Sampling-Frequenz von fs = 44100
Algebraische Kurven. Holger Grzeschik
 Algebraische Kurven Holger Grzeschik 29.04.2004 Inhaltsübersicht 1.Einführung in die Theorie algebraischer Kurven 2.Mathematische Wiederholung Gruppen, Ringe, Körper 3.Allgemeine affine Kurven 4.Singuläre
Algebraische Kurven Holger Grzeschik 29.04.2004 Inhaltsübersicht 1.Einführung in die Theorie algebraischer Kurven 2.Mathematische Wiederholung Gruppen, Ringe, Körper 3.Allgemeine affine Kurven 4.Singuläre
filter Filter Ziele Parameter Entwurf Zölzer (2002) Nov 14, 2015
 Nov 14, 2015") 1 Filter Ziele Parameter Entwurf Zölzer (2002) Nov 14, 2015 2 Beschreibung Übertragungsfunktion H(z), H(ω) Differenzengleichung y[n] Impulsantwort h[n]: Finite Infinite Impulse Response (FIR) Impulse Response
1 Filter Ziele Parameter Entwurf Zölzer (2002) Nov 14, 2015 2 Beschreibung Übertragungsfunktion H(z), H(ω) Differenzengleichung y[n] Impulsantwort h[n]: Finite Infinite Impulse Response (FIR) Impulse Response
Grundlagen der Videotechnik. Redundanz
 Grundlagen der Videotechnik Redundanz Redundanz beruht auf: - statistischen Abhängigkeiten im Signal, - Information, die vorher schon gesendet wurde - generell eine Art Gedächtnis im Signal Beispiel: Ein
Grundlagen der Videotechnik Redundanz Redundanz beruht auf: - statistischen Abhängigkeiten im Signal, - Information, die vorher schon gesendet wurde - generell eine Art Gedächtnis im Signal Beispiel: Ein
2.9 Die komplexen Zahlen
 LinAlg II Version 1 3. April 2006 c Rudolf Scharlau 121 2.9 Die komplexen Zahlen Die komplexen Zahlen sind unverzichtbar für nahezu jede Art von höherer Mathematik. Systematisch gehören sie zum einen in
LinAlg II Version 1 3. April 2006 c Rudolf Scharlau 121 2.9 Die komplexen Zahlen Die komplexen Zahlen sind unverzichtbar für nahezu jede Art von höherer Mathematik. Systematisch gehören sie zum einen in
G. Dobner/H.-J. Dobner: Lineare Algebra Elsevier Spektrum Akademischer Verlag
 G. Dobner/H.-J. Dobner: Lineare Algebra Elsevier Spektrum Akademischer Verlag Beantwortung der Fragen und Lösungen der Aufgaben zu Kapitel Version V vom 3.. 28 2 Beantwortung der Fragen zu Kapitel TESTFRAGEN
G. Dobner/H.-J. Dobner: Lineare Algebra Elsevier Spektrum Akademischer Verlag Beantwortung der Fragen und Lösungen der Aufgaben zu Kapitel Version V vom 3.. 28 2 Beantwortung der Fragen zu Kapitel TESTFRAGEN
Menge der natürlichen Zahlen = {1, 2, 3,...} Aber: a + x = b ist nur lösbar, falls b > a
 Komplexe Zahlen. Bedarfsfrage Menge der natürlichen Zahlen = {,, 3,...} Aber: a + x = b ist nur lösbar, falls b > a (Peano-Axiome). Erweiterung: Menge der ganen Zahlen = {..., -3, -, -, 0,,, 3,...} a +
Komplexe Zahlen. Bedarfsfrage Menge der natürlichen Zahlen = {,, 3,...} Aber: a + x = b ist nur lösbar, falls b > a (Peano-Axiome). Erweiterung: Menge der ganen Zahlen = {..., -3, -, -, 0,,, 3,...} a +
Einführung in die digitale Signalverarbeitung
 Einführung in die digitale Signalverarbeitung Prof. Dr. Stefan Weinzierl 1. Aufgabenblatt 1. Eigenschaften diskreter Systeme a. Erläutern Sie die Begriffe Linearität Zeitinvarianz Speicherfreiheit Kausalität
Einführung in die digitale Signalverarbeitung Prof. Dr. Stefan Weinzierl 1. Aufgabenblatt 1. Eigenschaften diskreter Systeme a. Erläutern Sie die Begriffe Linearität Zeitinvarianz Speicherfreiheit Kausalität
Mathematischer Vorkurs für Physiker WS 2012/13: Vorlesung 1
 TU München Prof. P. Vogl Mathematischer Vorkurs für Physiker WS 2012/13: Vorlesung 1 Komplexe Zahlen Das Auffinden aller Nullstellen von algebraischen Gleichungen ist ein Grundproblem, das in der Physik
TU München Prof. P. Vogl Mathematischer Vorkurs für Physiker WS 2012/13: Vorlesung 1 Komplexe Zahlen Das Auffinden aller Nullstellen von algebraischen Gleichungen ist ein Grundproblem, das in der Physik
Rationale, irrationale und reelle Zahlen. 4-E Vorkurs, Mathematik
 Rationale, irrationale und reelle Zahlen 4-E Vorkurs, Mathematik Rationale Zahlen Der Grund für die Einführung der rationalen Zahlen ist der, dass wir mit ihnen auch Gleichungen der Form q x = p lösen
Rationale, irrationale und reelle Zahlen 4-E Vorkurs, Mathematik Rationale Zahlen Der Grund für die Einführung der rationalen Zahlen ist der, dass wir mit ihnen auch Gleichungen der Form q x = p lösen
Orthogonale Waveletbasen
 Orthogonale Waveletbasen Johannes Stemick 12.12.08 Johannes Stemick () Orthogonale Waveletbasen 12.12.08 1 / 46 Übersicht 1 Multiskalenanalyse und Skalierungsfunktion Haar-Basis Multiskalenanalyse Konstruktion
Orthogonale Waveletbasen Johannes Stemick 12.12.08 Johannes Stemick () Orthogonale Waveletbasen 12.12.08 1 / 46 Übersicht 1 Multiskalenanalyse und Skalierungsfunktion Haar-Basis Multiskalenanalyse Konstruktion
Grundlagen der Regelungstechnik
 Grundlagen der Regelungstechnik Dr.-Ing. Georg von Wichert Siemens AG, Corporate Technology, München Termine Dies ist der letzte Termin in diesem Jahr 17.12.2004 fällt aus Nächste Termine: 14.1., 28.1.,
Grundlagen der Regelungstechnik Dr.-Ing. Georg von Wichert Siemens AG, Corporate Technology, München Termine Dies ist der letzte Termin in diesem Jahr 17.12.2004 fällt aus Nächste Termine: 14.1., 28.1.,
Dieses Kapitel vermittelt:
 2 Funktionen Lernziele Dieses Kapitel vermittelt: wie die Abhängigkeit quantitativer Größen mit Funktionen beschrieben wird die erforderlichen Grundkenntnisse elementarer Funktionen grundlegende Eigenschaften
2 Funktionen Lernziele Dieses Kapitel vermittelt: wie die Abhängigkeit quantitativer Größen mit Funktionen beschrieben wird die erforderlichen Grundkenntnisse elementarer Funktionen grundlegende Eigenschaften
10 Komplexe Zahlen. 2. Februar Komplexe Multiplikation: Für zwei Vektoren. z 1 =
 2. Februar 2009 66 0 Komplexe Zahlen 0. Komplexe Multiplikation: Für zwei Vektoren [ [ a a2 z =, z 2 = in R 2 wird neben der üblichen Addition die komplexe Multiplikation [ a a z z 2 := 2 b b 2 a b 2 +
2. Februar 2009 66 0 Komplexe Zahlen 0. Komplexe Multiplikation: Für zwei Vektoren [ [ a a2 z =, z 2 = in R 2 wird neben der üblichen Addition die komplexe Multiplikation [ a a z z 2 := 2 b b 2 a b 2 +
Grundlagen der Statistischen Nachrichtentheorie
 - Prof. Dr.-Ing. Thomas Sikora - Name:............................ Vorname:......................... Matr.Nr:........................... Ich bin mit der Veröffentlichung des Klausurergebnisses unter meiner
- Prof. Dr.-Ing. Thomas Sikora - Name:............................ Vorname:......................... Matr.Nr:........................... Ich bin mit der Veröffentlichung des Klausurergebnisses unter meiner
Systemtheorie Teil B
 d + d z + c d z + c uk d + + yk z d + c d z + c Systemtheorie Teil B - Zeitdiskrete Signale und Systeme Übungsaufgaben Manfred Strohrmann Urban Brunner Inhalt Übungsaufgaben - Signalabtastung und Rekonstruktion...
d + d z + c d z + c uk d + + yk z d + c d z + c Systemtheorie Teil B - Zeitdiskrete Signale und Systeme Übungsaufgaben Manfred Strohrmann Urban Brunner Inhalt Übungsaufgaben - Signalabtastung und Rekonstruktion...
A Die Menge C der komplexen Zahlen
 A Die Menge C der komplexen Zahlen (Vgl. auch Abschnitt C) A.1 Definition Wir erweitern R um eine Zahl i / R (genannt imaginäre Einheit) mit der Eigenschaft i 2 i i = 1. (653) Unter einer komplexen Zahl
A Die Menge C der komplexen Zahlen (Vgl. auch Abschnitt C) A.1 Definition Wir erweitern R um eine Zahl i / R (genannt imaginäre Einheit) mit der Eigenschaft i 2 i i = 1. (653) Unter einer komplexen Zahl
Institut für Elektrotechnik und Informationstechnik. Aufgabensammlung zur. Systemtheorie
 Institut für Elektrotechnik und Informationstechnik Aufgabensammlung zur Systemtheorie Prof. Dr. techn. F. Gausch Dipl.-Ing. C. Balewski Dipl.-Ing. R. Besrat 05.04.2013 Übungsaufgaben zur Systemtheorie
Institut für Elektrotechnik und Informationstechnik Aufgabensammlung zur Systemtheorie Prof. Dr. techn. F. Gausch Dipl.-Ing. C. Balewski Dipl.-Ing. R. Besrat 05.04.2013 Übungsaufgaben zur Systemtheorie
Test = 28 Punkte. 1: 2: 3: 4: 5: Punkte: Note:
 ZHAW, DSV1, FS2010, Rumc, 1 Test 1 5 + 5 + 5 + 8 + 5 = 28 Punkte Name: Vorname: 1: 2: : 4: 5: Punkte: Note: Aufgabe 1: AD-DA-System. + 1 + 1 = 5 Punkte Das analoge Signal x a (t) = cos(2πf 0 t), f 0 =750
ZHAW, DSV1, FS2010, Rumc, 1 Test 1 5 + 5 + 5 + 8 + 5 = 28 Punkte Name: Vorname: 1: 2: : 4: 5: Punkte: Note: Aufgabe 1: AD-DA-System. + 1 + 1 = 5 Punkte Das analoge Signal x a (t) = cos(2πf 0 t), f 0 =750
8. Der Fundamentalsatz der Algebra
 8. Aussage Fundamentalsatz der Algebra. Für jede natürlich Zahl n und beliebigen komplexen Koeffizienten a 0,a,...,a n hat die algebraische Gleichung x n +a n x n +...+a x+a 0 = 0, () eine Lösung in C.
8. Aussage Fundamentalsatz der Algebra. Für jede natürlich Zahl n und beliebigen komplexen Koeffizienten a 0,a,...,a n hat die algebraische Gleichung x n +a n x n +...+a x+a 0 = 0, () eine Lösung in C.
Zentralübung zur Vorlesung Diskrete Strukturen (Prof. Mayr)
") WS 2011/12 Zentralübung zur Vorlesung Diskrete Strukturen (Prof. Mayr) Dr. Werner Meixner Fakultät für Informatik TU München http://www14.in.tum.de/lehre/2011ws/ds/uebung/ 18. Januar 2012 ZÜ DS ZÜ XII
WS 2011/12 Zentralübung zur Vorlesung Diskrete Strukturen (Prof. Mayr) Dr. Werner Meixner Fakultät für Informatik TU München http://www14.in.tum.de/lehre/2011ws/ds/uebung/ 18. Januar 2012 ZÜ DS ZÜ XII
Lineare Prädiktion. Stephan Arlinghaus 9. November 2006
 Stephan Arlinghaus 9. November 2006 Gliederung 1 Einleitung Sprachanalyse... etwas Mathematik 2 Das autoregressive Modell (AR) (LP) 3 Kovarianzmethode Autokorrelationsmethode Methodenvergleich 4 5 Der
Stephan Arlinghaus 9. November 2006 Gliederung 1 Einleitung Sprachanalyse... etwas Mathematik 2 Das autoregressive Modell (AR) (LP) 3 Kovarianzmethode Autokorrelationsmethode Methodenvergleich 4 5 Der
2.5 Lineare Differentialgleichungen n-ter Ordnung
 2.5 Lineare Differentialgleichungen n-ter Ordnung Eine Dgl der Gestalt a n (x)y (n) +a n 1 (x)y (n 1) +...+a 2 (x)y +a 1 (x)y +a 0 (x)y = b(x) heißt lineare Dgl n-ter Ordnung. ( ) Dabei sind a 0, a 1,...,
2.5 Lineare Differentialgleichungen n-ter Ordnung Eine Dgl der Gestalt a n (x)y (n) +a n 1 (x)y (n 1) +...+a 2 (x)y +a 1 (x)y +a 0 (x)y = b(x) heißt lineare Dgl n-ter Ordnung. ( ) Dabei sind a 0, a 1,...,
Gebrochen-rationale Funktionen
 Definition Eine gebrochen-rationale Funktion ist eine Funktion, bei der sich im Zähler und Nenner eine ganzrationale Funktion (Polynom) befindet: Eigenschaften f(x) = g(x) h(x) Echt gebrochen-rationale
Definition Eine gebrochen-rationale Funktion ist eine Funktion, bei der sich im Zähler und Nenner eine ganzrationale Funktion (Polynom) befindet: Eigenschaften f(x) = g(x) h(x) Echt gebrochen-rationale
Signale und Systeme I
 TECHNISCHE FAKULTÄT DER CHRISTIAN-ALBRECHTS-UNIVERSITÄT ZU KIEL DIGITALE SIGNALVERARBEITUNG UND SYSTEMTHEORIE DSS Signale und Systeme I Formelsammlung v.5 Inhaltsverzeichnis Mathematische Formeln. Trigonometrische
TECHNISCHE FAKULTÄT DER CHRISTIAN-ALBRECHTS-UNIVERSITÄT ZU KIEL DIGITALE SIGNALVERARBEITUNG UND SYSTEMTHEORIE DSS Signale und Systeme I Formelsammlung v.5 Inhaltsverzeichnis Mathematische Formeln. Trigonometrische
Lösungen zur Klausur Funktionentheorie I SS 2005
 Universität Karlsruhe 29 September 25 Mathematisches Institut I Prof Dr M von Renteln Dr C Kaiser Aufgabe en zur Klausur Funktionentheorie I SS 25 Sei S die Möbiustransformation, die durch S(z) = i i z
Universität Karlsruhe 29 September 25 Mathematisches Institut I Prof Dr M von Renteln Dr C Kaiser Aufgabe en zur Klausur Funktionentheorie I SS 25 Sei S die Möbiustransformation, die durch S(z) = i i z
EAH Jena Prüfungsaufgaben Prof. Giesecke FB ET/IT Filterentwurf WS 12/13
 FB ET/IT Filterentwurf WS 2/3 Name, Vorname: Matr.-Nr.: Zugelassene Hilfsmittel: beliebiger Taschenrechner eine selbsterstellte Formelsammlung ein mathematisches Formelwerk Wichtige Hinweise: Ausführungen,
FB ET/IT Filterentwurf WS 2/3 Name, Vorname: Matr.-Nr.: Zugelassene Hilfsmittel: beliebiger Taschenrechner eine selbsterstellte Formelsammlung ein mathematisches Formelwerk Wichtige Hinweise: Ausführungen,
Übungen zu Einführung in die Lineare Algebra und Geometrie
 Übungen zu Einführung in die Lineare Algebra und Geometrie Andreas Cap Wintersemester 2014/15 Kapitel 1: Einleitung (1) Für a, b Z diskutiere analog zur Vorlesung das Lösungsverhalten der Gleichung ax
Übungen zu Einführung in die Lineare Algebra und Geometrie Andreas Cap Wintersemester 2014/15 Kapitel 1: Einleitung (1) Für a, b Z diskutiere analog zur Vorlesung das Lösungsverhalten der Gleichung ax
Polynomiale Gleichungen
 Vorlesung 5 Polynomiale Gleichungen Definition 5.0.3. Ein polynomiale Funktion p(x) in der Variablen x R ist eine endliche Summe von Potenzen von x, die Exponenten sind hierbei natürliche Zahlen. Wir haben
Vorlesung 5 Polynomiale Gleichungen Definition 5.0.3. Ein polynomiale Funktion p(x) in der Variablen x R ist eine endliche Summe von Potenzen von x, die Exponenten sind hierbei natürliche Zahlen. Wir haben
Signale und Systeme Lineare Systeme
 Signale und Systeme Lineare Systeme Gerhard Schmidt Christian-Albrechts-Universität zu Kiel Technische Fakultät Elektrotechnik und Informationstechnik Digitale Signalverarbeitung und Systemtheorie Seite
Signale und Systeme Lineare Systeme Gerhard Schmidt Christian-Albrechts-Universität zu Kiel Technische Fakultät Elektrotechnik und Informationstechnik Digitale Signalverarbeitung und Systemtheorie Seite
TEIL 1 (ohne Rechner)
") Fachhochschule Nordwestschweiz (FHNW Hochschule für Technik Institut für Geistes- und Naturwissenschaft Dozent: Roger Burkhardt Klasse: Studiengang ST Lösungen Repetition Algebra Büro:.63 Semester: 2 Modul:
Fachhochschule Nordwestschweiz (FHNW Hochschule für Technik Institut für Geistes- und Naturwissenschaft Dozent: Roger Burkhardt Klasse: Studiengang ST Lösungen Repetition Algebra Büro:.63 Semester: 2 Modul:
Mathematische Strukturen
 Mathematische Strukturen Lineare Algebra I Kapitel 3 18. April 2012 Logistik Dozent: Olga Holtz, MA 378, Sprechstunden Freitag 14-16 Webseite: www.math.tu-berlin.de/ holtz Email: holtz@math.tu-berlin.de
Mathematische Strukturen Lineare Algebra I Kapitel 3 18. April 2012 Logistik Dozent: Olga Holtz, MA 378, Sprechstunden Freitag 14-16 Webseite: www.math.tu-berlin.de/ holtz Email: holtz@math.tu-berlin.de
Einiges über komplexe Zahlen
 Lineare Algebra und Analytische Geometrie I für LB WS 2001/2002 Dr. Bruno Riedmüller Einiges über komplexe Zahlen Es muss davon ausgegangen werden, dass der Leser mit komplexen Zahlen wenig oder nicht
Lineare Algebra und Analytische Geometrie I für LB WS 2001/2002 Dr. Bruno Riedmüller Einiges über komplexe Zahlen Es muss davon ausgegangen werden, dass der Leser mit komplexen Zahlen wenig oder nicht
Urs Wyder, 4057 Basel Funktionen. f x x x x 2
 Urs Wyder, 4057 Basel Urs.Wyder@edubs.ch Funktionen f 3 ( ) = + f ( ) = sin(4 ) Inhaltsverzeichnis DEFINITION DES FUNKTIONSBEGRIFFS...3. NOTATION...3. STETIGKEIT...3.3 ABSCHNITTSWEISE DEFINIERTE FUNKTIONEN...4
Urs Wyder, 4057 Basel Urs.Wyder@edubs.ch Funktionen f 3 ( ) = + f ( ) = sin(4 ) Inhaltsverzeichnis DEFINITION DES FUNKTIONSBEGRIFFS...3. NOTATION...3. STETIGKEIT...3.3 ABSCHNITTSWEISE DEFINIERTE FUNKTIONEN...4
Algebraische Kurven - Vorlesung 29. Projektion weg von einem Punkt
 Algebraische Kurven - Vorlesung 29 Definition 1. Die Abbildung P n K Projektion weg von einem Punkt {(1, 0,..., 0)} Pn 1 K, (x 0, x 1...,x n ) (x 1,..., x n ), heißt die Projektion weg vom Punkt (1, 0,...,
Algebraische Kurven - Vorlesung 29 Definition 1. Die Abbildung P n K Projektion weg von einem Punkt {(1, 0,..., 0)} Pn 1 K, (x 0, x 1...,x n ) (x 1,..., x n ), heißt die Projektion weg vom Punkt (1, 0,...,
Analytische Lösung algebraischer Gleichungen dritten und vierten Grades
 Analytische Lösung algebraischer Gleichungen dritten und vierten Grades Inhaltsverzeichnis 1 Einführung 1 2 Gleichungen dritten Grades 3 3 Gleichungen vierten Grades 7 1 Einführung In diesem Skript werden
Analytische Lösung algebraischer Gleichungen dritten und vierten Grades Inhaltsverzeichnis 1 Einführung 1 2 Gleichungen dritten Grades 3 3 Gleichungen vierten Grades 7 1 Einführung In diesem Skript werden
Praktikum: Digitale Signalverarbeitung (ET215) Test 1
 Test 1") PROFESSOR DR.-ING. MARTIN WERNER M.W. Fachbereich Elektrotechnik und Informationstechnik Hochschule Fulda Praktikum: Digitale Signalverarbeitung (ET215) Test 1 Erklärung Mit meiner Unterschrift erkläre
PROFESSOR DR.-ING. MARTIN WERNER M.W. Fachbereich Elektrotechnik und Informationstechnik Hochschule Fulda Praktikum: Digitale Signalverarbeitung (ET215) Test 1 Erklärung Mit meiner Unterschrift erkläre
. tr K/Q (b n b 1 ) tr K/Q (b n b n ) Verhalten der Diskriminante unter Basistransformation
 tr K/Q (b n b n ) Verhalten der Diskriminante unter Basistransformation") Definition der Diskriminante Sei K ein Zahlkörper, also eine endliche Körpererweiterung von Q. Sei b 1,..., b n eine Basis von K als Q-Vektorraum. Dann heißt die rationale Zahl tr K/Q (b 1 b 1 ) tr K/Q
Definition der Diskriminante Sei K ein Zahlkörper, also eine endliche Körpererweiterung von Q. Sei b 1,..., b n eine Basis von K als Q-Vektorraum. Dann heißt die rationale Zahl tr K/Q (b 1 b 1 ) tr K/Q
Aufgabe 3. Signal Processing and Speech Communication Lab. Graz University of Technology
 Signal Processing and Speech Communication Lab. Graz University of Technology Aufgabe 3 Senden Sie die Hausübung bis spätestens 15.06.2015 per Email an hw1.spsc@tugraz.at. Verwenden Sie MatrikelNummer1
Signal Processing and Speech Communication Lab. Graz University of Technology Aufgabe 3 Senden Sie die Hausübung bis spätestens 15.06.2015 per Email an hw1.spsc@tugraz.at. Verwenden Sie MatrikelNummer1
Einführung in die Algebra
 Prof. Dr. H. Brenner Osnabrück SS 2009 Einführung in die Algebra Vorlesung 22 Algebraische Körpererweiterung Satz 1. Sei K L eine Körpererweiterung und sei f L ein Element. Dann sind folgende Aussagen
Prof. Dr. H. Brenner Osnabrück SS 2009 Einführung in die Algebra Vorlesung 22 Algebraische Körpererweiterung Satz 1. Sei K L eine Körpererweiterung und sei f L ein Element. Dann sind folgende Aussagen
Diskrete Fourier-Transformation Stefanie Dourvos Institut für Informatik FU Berlin
 Diskrete Fourier-Transformation Stefanie Dourvos Institut für Informatik FU Berlin 28.04.09 Übersicht Einleitung Problem: polynomiale Multiplikation Crashkurs Diskrete Fourier-Transformation DFT mit FFT
Diskrete Fourier-Transformation Stefanie Dourvos Institut für Informatik FU Berlin 28.04.09 Übersicht Einleitung Problem: polynomiale Multiplikation Crashkurs Diskrete Fourier-Transformation DFT mit FFT
Digitale Signalverarbeitungssysteme II: Praktikum 2
 Digitale Signalverarbeitungssysteme II: Praktikum 2 Emil Matus 10. Dezember 2010 Technische Universität Dresden Mobile Communications Systems Chair Tel.: +49 351 463 41021 Fax : +49 351 463 41099 Mail:
Digitale Signalverarbeitungssysteme II: Praktikum 2 Emil Matus 10. Dezember 2010 Technische Universität Dresden Mobile Communications Systems Chair Tel.: +49 351 463 41021 Fax : +49 351 463 41099 Mail:
Komplexe Zahlen. Allgemeines. Definition. Darstellungsformen. Umrechnungen
 Komplexe Zahlen Allgemeines Definition Eine komplexe Zahl z x + y i besteht aus einem Realteil Re(z) x und einem Imaginärteil Im(z) y. Der Imaginärteil wird mit der Imaginären-Einheit i multipliziert.
Komplexe Zahlen Allgemeines Definition Eine komplexe Zahl z x + y i besteht aus einem Realteil Re(z) x und einem Imaginärteil Im(z) y. Der Imaginärteil wird mit der Imaginären-Einheit i multipliziert.
Systeme von Differentialgleichungen. Beispiel 1: Chemische Reaktionssysteme. Beispiel 2. System aus n Differentialgleichungen 1. Ordnung: y 1.
 Systeme von Differentialgleichungen Beispiel : Chemische Reaktionssysteme System aus n Differentialgleichungen Ordnung: y (x = f (x, y (x,, y n (x Kurzschreibweise: y y 2 (x = f 2(x, y (x,, y n (x y n(x
Systeme von Differentialgleichungen Beispiel : Chemische Reaktionssysteme System aus n Differentialgleichungen Ordnung: y (x = f (x, y (x,, y n (x Kurzschreibweise: y y 2 (x = f 2(x, y (x,, y n (x y n(x
Versuch 3: Anwendungen der schnellen Fourier-Transformation (FFT)
") Versuch 3: Anwendungen der schnellen Fourier-Transformation (FFT) Ziele In diesem Versuch lernen Sie zwei Anwendungen der Diskreten Fourier-Transformation in der Realisierung als recheneffiziente schnelle
Versuch 3: Anwendungen der schnellen Fourier-Transformation (FFT) Ziele In diesem Versuch lernen Sie zwei Anwendungen der Diskreten Fourier-Transformation in der Realisierung als recheneffiziente schnelle
Die Beschreibung von Signalen und Systemen kann in verschiedenen Bereichen erfolgen:
 1 Grundlegende Begriffe 1.1 Signale und Systeme ein Signal: ein System: ist ein Satz von Daten setzt Signale in Beziehung Darstellung: Die Beschreibung von Signalen und Systemen kann in verschiedenen Bereichen
1 Grundlegende Begriffe 1.1 Signale und Systeme ein Signal: ein System: ist ein Satz von Daten setzt Signale in Beziehung Darstellung: Die Beschreibung von Signalen und Systemen kann in verschiedenen Bereichen
3. Quantisierte IIR-Filter R
 . Zweierkomplement a) Wie sieht die binäre Darstellung von -5 aus bei den Wortbreiten b = 4, b =, b = 6? b) Berechnen Sie folgende Additionen im Format SINT(4). Geben Sie bei Überlauf auch die Ausgaben
. Zweierkomplement a) Wie sieht die binäre Darstellung von -5 aus bei den Wortbreiten b = 4, b =, b = 6? b) Berechnen Sie folgende Additionen im Format SINT(4). Geben Sie bei Überlauf auch die Ausgaben
Kapitel 3. Kapitel 3 Gleichungen
 Gleichungen Inhalt 3.1 3.1 Terme, Gleichungen, Lösungen x 2 2 + y 2 2 3.2 3.2 Verfahren zur zur Lösung von von Gleichungen 3x 3x + 5 = 14 14 3.3 3.3 Gleichungssysteme Seite 2 3.1 Terme, Gleichungen, Lösungen
Gleichungen Inhalt 3.1 3.1 Terme, Gleichungen, Lösungen x 2 2 + y 2 2 3.2 3.2 Verfahren zur zur Lösung von von Gleichungen 3x 3x + 5 = 14 14 3.3 3.3 Gleichungssysteme Seite 2 3.1 Terme, Gleichungen, Lösungen
π und die Quadratur des Kreises
 π und die Quadratur des Kreises Schnupper-Uni für SchülerInnen 8. Februar 2006 Dr. Michael Welter http://www.math.uni-bonn.de/people/welter 1 Konstruktionen mit Zirkel und Lineal Gegeben sei eine Menge
π und die Quadratur des Kreises Schnupper-Uni für SchülerInnen 8. Februar 2006 Dr. Michael Welter http://www.math.uni-bonn.de/people/welter 1 Konstruktionen mit Zirkel und Lineal Gegeben sei eine Menge