Algorithmen für Sensornetze
|
|
|
- Petra Berger
- vor 6 Jahren
- Abrufe
Transkript
1 Algorithmen für Sensornetze Markus Völker 02. Februar 2010
2 Lokalisierung in Gebäuden
3 Lokalisierung Ausgangssituation?
4 Lokalisierung Ziel!
5 Lokalisierung Signalabfall in Gebäuden Signalabfall mit ca. 1/d 2 Signalabfall an Wänden (normalverteilt, µ 5db)
6 Lokalisierung Signalabfall - Messung
7 Lokalisierung Signalabfall - Messung
8 Lokalisierung Existierende Ansätze (x,y,z) (x,y,z) (x,y,z) (x,y,z) (x,y,z) (x,y,z)? Positionen der Sensorknoten bekannt (x,y,z) (x,y,z) Eigenheiten von Wänden etc. nicht berücksichtigt (x,y,z) (x,y,z) (x,y,z) (x,y,z) (x,y,z)
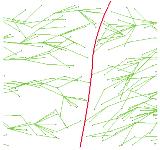
9 Lokalisierung Szenario 1 - Sensornetz lokalisieren
10 Lokalisierung Szenario 1 - Sensornetz lokalisieren
11 Lokalisierung Szenario 1 - Sensornetz lokalisieren
12 Lokalisierung Szenario 1 - Sensornetz lokalisieren
13 Lokalisierung Szenario 1 - Sensornetz lokalisieren
14 Lokalisierung Szenario 1 - Sensornetz lokalisieren
15 Lokalisierung 1. Schritt: Entfernung aus Signalstärke bestimmen 2. Schritt: Verbesserung der Positionsschätzung Ansatz: Spring Embedder Kanten durch Federn ersetzen Gewichtung der Kanten nach Güte der Schätzung Verlangsamung der Knoten gemäß Positionsgenauigkeit Anziehungskraft dominant (Distanz oft überschätzt)
16 Lokalisierung Szenario 2 - Sensornetz lokalisieren?????????????
17 Lokalisierung Szenario 2 - Sensornetz lokalisieren?
18 Lokalisierung Szenario 2 - Sensornetz lokalisieren?
19 Lokalisierung Szenario 2 - Sensornetz lokalisieren?
20 Lokalisierung Szenario 2 - Sensornetz lokalisieren
21 Lokalisierung Szenario 2 - Sensornetz lokalisieren
22 Lokalisierung Vorgehen Distanzen zwischen Sensorknoten abschätzen
23 Lokalisierung Vorgehen Multidimensionale Skalierung (MDS) Spring Embedder
24 Lokalisierung Vorteile? Knoten müssen nur senden kleine, billige Knoten ausreichend sehr viele Knoten denkbar (Museum, Supermarkt)
25 Lokalisierung Vorteile? Knoten müssen nur senden bestehende Infrastruktur nutzbar
26 Lokalisierung Vorteile Viele Messwerte an unterschiedlichen Positionen Störungen mitteln sich raus
27 Lokalisierung Vorteile Hindernisse können umgangen werden
28 Lokalisierung Vorteile Kürzere Distanzen höhere Genauigkeit
29 Lokalisierung Vorteile Größere Distanzen erkennbar
30 Lokalisierung Vorteile Sehr dichtes Netz mit vielen Messwerten Gute Chancen, die richtige Einbettung zu finden
31 Lokalisierung Ausblick: Erkennung von Räumen (möglich?) vermutlich bräuchte man sehr viele Sender
32 Randerkennung

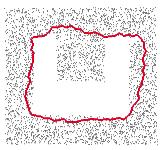
33 Randerkennung Problemstellung Menge von Sensorknoten Begrenzungen der Knotenmenge Knoten besitzen keine Positionsinformation
34 Randerkennung Ansatz 1: Statistisches Verfahren Prinzip: Knotengrad am Rand niedriger Probleme bei schwankendem Knotengrad




35 Randerkennung Ansatz 2: Kürzeste-Wege Verfahren Probleme: Aufwändig und nicht lokal
36 Randerkennung Neuer Ansatz 2-Hop-Nachbarschaft bildet Kreis kein Randknoten kein Kreis in 2-Hop-Nachbarschaft Randknoten Vorteile: Lokal und relativ unabhängig vom Knotengrad
37 Randerkennung Neuer Ansatz 2-Hop-Nachbarschaft bildet Kreis kein Randknoten kein Kreis in 2-Hop-Nachbarschaft Randknoten Vorteile: Lokal und relativ unabhängig vom Knotengrad
38 Randerkennung Neuer Ansatz Herausforderung:
39 Randerkennung Neuer Ansatz Herausforderung:
40 Randerkennung Neuer Ansatz Randknoten innerer Knoten
41 Randerkennung Neuer Ansatz - Beispiel
42 Randerkennung Ansatz: Multidimensionale Skalierung (MDS)
43 Scheduling
44 Scheduling Problemstellung Gegeben: Menge von drahtlosen Übertragungen Slot 1 Gesucht: Verteilung der Übertragungen auf Zeitslots Vermeidung von Kollisionen TDMA Schedule Slot 2 Slot 3
45 Scheduling Zugrundeliegende Modelle Übertragungsmodell: Signal-to-Interference-plus-Noise-Ratio Modell Signal-Rauschverhältnis entscheidet über Übertragungserfolg benötigtes SINR β 10 Signal Interferenz+Hintergrundrauschen β Signalausbreitung: Log-Distance Modell Signalstärke fällt mit Distanz α ab α zwischen 2 und 5, je nach Szenario S = 1 d α
46 Scheduling Probemvarianten Scheduling mit fester Sendeleistung Scheduling mit Leistungskontrolle
47 Scheduling Betrachtete Problemstellungen Komplexität Berechnung exakter Lösungen Ganzzahlige Lineare Programmierung (ILP) Constraint Programming (CP) Effiziente Sendeleistungskontrolle Scheduling Heuristiken Optimierung des Energiebedarfs
48 Scheduling Bestimmung optimaler Sendeleistungen Gegeben: Menge von Übertragungen Gesucht: Minimale Sendeleistungen Alle Übertragungen erfolgreich Interferenzen berücksichtigt
49 Scheduling Bestimmung optimaler Sendeleistungen Ansatz aus Literatur: Iteratives Anpassen der Sendeleistung T1 T3 Leistung Interferenz Leistung Interferenz Leistung Interferenz Leistung Interferenz T2 T4 T1 T2 T3 T4 Aufwand: O(c n 2 ), wobei c 20 Anzahl der Wiederholungen
50 Scheduling Bestimmung optimaler Sendeleistungen Ansatz aus Literatur: Iteratives Anpassen der Sendeleistung T1 T3 Leistung Interferenz Leistung Interferenz Leistung Interferenz Leistung Interferenz T2 T4 T1 T2 T3 T4 Aufwand: O(c n 2 ), wobei c 20 Anzahl der Wiederholungen
51 Scheduling Bestimmung optimaler Sendeleistungen Ansatz aus Literatur: Iteratives Anpassen der Sendeleistung T1 T3 Leistung Interferenz Leistung Interferenz Leistung Interferenz Leistung Interferenz T2 T4 T1 T2 T3 T4 Aufwand: O(c n 2 ), wobei c 20 Anzahl der Wiederholungen
52 Scheduling Bestimmung optimaler Sendeleistungen Ansatz aus Literatur: Iteratives Anpassen der Sendeleistung T1 T3 Leistung Interferenz Leistung Interferenz Leistung Interferenz Leistung Interferenz T2 T4 T1 T2 T3 T4 Aufwand: O(c n 2 ), wobei c 20 Anzahl der Wiederholungen
53 Scheduling Bestimmung optimaler Sendeleistungen Besser: Lineares Gleichungssystem geschickt lösen P 1 γ 1,1 = P 2 γ 2,1 + P 3 γ 3,1 + P 4 γ 4,1 + η P 2 γ 2,2 = P 1 γ 1,2 + P 3 γ 3,2 + P 4 γ 4,2 + η P 3 γ 3,3 = P 1 γ 1,3 + P 2 γ 2,3 + P 4 γ 4,3 + η P 4 γ 4,4 = P 1 γ 1,4 + P 2 γ 2,4 + P 3 γ 3,4 + η T1 T2 T3 T4
54 Scheduling Gleichungssystem schrittweise lösen k k k k k k aktive Übertragungen Vorausberechnung optimaler Sendeleistung in O(k) statt O(k 3 ). Mächtigere Heuristiken ohne Laufzeiteinbußen
55 Vielen Dank für die Aufmerksamkeit! Fragen?
56 Scheduling Heuristik - Performance Durchsatz und Energieverbrauch
57 Scheduling Heuristik - Prinzipielles Vorgehen Variante 1: Slot für Slot Slot 1
58 Scheduling Heuristik - Prinzipielles Vorgehen Variante 1: Slot für Slot Slot 1
59 Scheduling Heuristik - Prinzipielles Vorgehen Variante 1: Slot für Slot Slot 1 Slot 2
60 Scheduling Heuristik - Prinzipielles Vorgehen Variante 1: Slot für Slot Slot 1 Slot 2
61 Scheduling Heuristik - Prinzipielles Vorgehen Variante 1: Slot für Slot Slot 1 Slot 2 Slot 3 Variante 2: Slots parallel füllen
62 Scheduling Heuristik - Prinzipielles Vorgehen Variante 1: Slot für Slot Slot 1 Slot 2 Slot 3 Variante 2: Slots parallel füllen Slot 1 Slot 2 Slot 3
63 Scheduling Heuristik - Prinzipielles Vorgehen Variante 1: Slot für Slot Slot 1 Slot 2 Slot 3 Variante 2: Slots parallel füllen Slot 1 Slot 2 Slot 3
64 Scheduling Heuristik - Prinzipielles Vorgehen Variante 1: Slot für Slot Slot 1 Slot 2 Slot 3 Variante 2: Slots parallel füllen Slot 1 Slot 2 Slot 3
65 Scheduling Heuristik - Prinzipielles Vorgehen Variante 1: Slot für Slot Slot 1 Slot 2 Slot 3 Variante 2: Slots parallel füllen Slot 1 Slot 2 Slot 3
66 Scheduling Heuristik - Prinzipielles Vorgehen Variante 1: Slot für Slot Herausforderungen: Auswahl guter Übertragungen Bestimmung optimaler Sendeleistungen Variante 2: Slots parallel füllen Herausforderungen: Auswahl guter Slots Bestimmung optimaler Sendeleistungen
Algorithmen für Ad-hoc- und Sensornetze
 Algorithmen für Ad-hoc- und Sensornetze Übung 6 Kommunikation und Färbungen im SINR Modell (basierend auf VL11) Fabian Fuchs 17. Jan. 2015 (Version 1) INSTITUT FÜR THEORETISCHE INFORMATIK - LEHRSTUHL FÜR
Algorithmen für Ad-hoc- und Sensornetze Übung 6 Kommunikation und Färbungen im SINR Modell (basierend auf VL11) Fabian Fuchs 17. Jan. 2015 (Version 1) INSTITUT FÜR THEORETISCHE INFORMATIK - LEHRSTUHL FÜR
Algorithmen für Ad-hoc- und Sensornetze
 Algorithmen für Ad-hoc- und Sensornetze VL 11 Kommunikation und Färbungen im SINR Modell Fabian Fuchs 17. Dez. 2015 (Version 1) INSTITUT FÜR THEORETISCHE INFORMATIK - LEHRSTUHL FÜR ALGORITHMIK (PROF. WAGNER)
Algorithmen für Ad-hoc- und Sensornetze VL 11 Kommunikation und Färbungen im SINR Modell Fabian Fuchs 17. Dez. 2015 (Version 1) INSTITUT FÜR THEORETISCHE INFORMATIK - LEHRSTUHL FÜR ALGORITHMIK (PROF. WAGNER)
Algorithmen für Ad-hoc- und Sensornetze VL 11 Kapazität und Scheduling
 Algorithmen für Ad-hoc- und Sensornetze VL 11 Kapazität und Scheduling Dr. rer. nat. Bastian Katz 8. Juli 2009 (Version 2 vom 13. Juli 2009) Motivation Wenn man Übertragungen optimal zeitlich plant, kann
Algorithmen für Ad-hoc- und Sensornetze VL 11 Kapazität und Scheduling Dr. rer. nat. Bastian Katz 8. Juli 2009 (Version 2 vom 13. Juli 2009) Motivation Wenn man Übertragungen optimal zeitlich plant, kann
Topologieerkennung von Sensornetzwerken
 looz@ira.uka.de Institut für Theoretische Informatik - Algorithmik I 26. Januar 2010 Übersicht Motivation Definitionen Überlegungen Algorithmus Resultate Motivation Definitionen Überlegungen Algorithmus
looz@ira.uka.de Institut für Theoretische Informatik - Algorithmik I 26. Januar 2010 Übersicht Motivation Definitionen Überlegungen Algorithmus Resultate Motivation Definitionen Überlegungen Algorithmus
Lokalisierung und Topologiekontrolle
 Lokalisierung und Topologiekontrolle Seminar: Kommunikation in drahtlosen Sensornetzwerken Martin Schmidt Einführung Lokalisierung: Für viele Informationen ist die Position wichtig Traditionelle Technik
Lokalisierung und Topologiekontrolle Seminar: Kommunikation in drahtlosen Sensornetzwerken Martin Schmidt Einführung Lokalisierung: Für viele Informationen ist die Position wichtig Traditionelle Technik
Lokalisierung von inneren und äußeren Grenzen in Sensornetzwerken
 Lokalisierung von inneren und äußeren Grenzen in Sensornetzwerken Seminararbeit: Algorithmen für Sensornetzwerke Thomas Gramer 1 Thomas Gramer: KIT Universität des Landes Baden-Württemberg und nationales
Lokalisierung von inneren und äußeren Grenzen in Sensornetzwerken Seminararbeit: Algorithmen für Sensornetzwerke Thomas Gramer 1 Thomas Gramer: KIT Universität des Landes Baden-Württemberg und nationales
FUNKTECHNOLOGIEN FÜR DIE INDUSTRIE 4.0. Dr. Barbara Staehle BICCnet OpenLabs am Fraunhofer ESK, München, 17. September 2014
 FUNKTECHNOLOGIEN FÜR DIE INDUSTRIE 4.0 Dr. Barbara Staehle BICCnet OpenLabs am Fraunhofer ESK, München, 17. September 2014 AGENDA Einleitung & Motivation Koexistenzmanagement & Cognitive Radio Technologien
FUNKTECHNOLOGIEN FÜR DIE INDUSTRIE 4.0 Dr. Barbara Staehle BICCnet OpenLabs am Fraunhofer ESK, München, 17. September 2014 AGENDA Einleitung & Motivation Koexistenzmanagement & Cognitive Radio Technologien
Algorithmen für Ad-hoc- und Sensornetze
 Algorithmen für Ad-hoc- und Sensornetze VL 0 Kapazität, Scheduling und Färbungen Fabian Fuchs 0. Dez. 05 (Version ) INSTITUT FÜR THEORETISCHE INFORMATIK - LEHRSTUHL FÜR ALGORITHMIK (PROF. WAGNER) KIT Universität
Algorithmen für Ad-hoc- und Sensornetze VL 0 Kapazität, Scheduling und Färbungen Fabian Fuchs 0. Dez. 05 (Version ) INSTITUT FÜR THEORETISCHE INFORMATIK - LEHRSTUHL FÜR ALGORITHMIK (PROF. WAGNER) KIT Universität
Kapitel 9: Lineare Programmierung Gliederung
 Gliederung 1. Grundlagen 2. Zahlentheoretische Algorithmen 3. Sortierverfahren 4. Ausgewählte Datenstrukturen 5. Dynamisches Programmieren 6. Graphalgorithmen 7. String-Matching 8. Kombinatorische Algorithmen
Gliederung 1. Grundlagen 2. Zahlentheoretische Algorithmen 3. Sortierverfahren 4. Ausgewählte Datenstrukturen 5. Dynamisches Programmieren 6. Graphalgorithmen 7. String-Matching 8. Kombinatorische Algorithmen
Euklidische Distanzmatrizen. Andrei Grecu
 Euklidische Distanzmatrizen Andrei Grecu Übersicht Motivation Definition und Problemstellung Algo 1: Semidefinite Programmierung Algo 2: Multidimensional Scaling Algo 3: Spring Embedder Algo 4: Genetischer
Euklidische Distanzmatrizen Andrei Grecu Übersicht Motivation Definition und Problemstellung Algo 1: Semidefinite Programmierung Algo 2: Multidimensional Scaling Algo 3: Spring Embedder Algo 4: Genetischer
Algorithmische Methoden für schwere Optimierungsprobleme
 Algorithmische Methoden für schwere Optimierungsprobleme Prof. Dr. Henning Meyerhenke Institut für Theoretische Informatik 1 KIT Henning Universität desmeyerhenke, Landes Baden-Württemberg Institutund
Algorithmische Methoden für schwere Optimierungsprobleme Prof. Dr. Henning Meyerhenke Institut für Theoretische Informatik 1 KIT Henning Universität desmeyerhenke, Landes Baden-Württemberg Institutund
Neuronalen Netzen. Jens Lehmann. 1. März Institut für Künstliche Intelligenz Fakultät Informatik Technische Universität Dresden
 Institut für Künstliche Intelligenz Fakultät Informatik Technische Universität Dresden 1. März 2005 Neurosymbolische Integration versucht künstliche neuronale Netze und Logikprogrammierung zu vereinen
Institut für Künstliche Intelligenz Fakultät Informatik Technische Universität Dresden 1. März 2005 Neurosymbolische Integration versucht künstliche neuronale Netze und Logikprogrammierung zu vereinen
Dynamisches Routing in der Logistik
 Informatik, Angewandte Informatik, Technische Informationssysteme Dynamisches Routing in der Logistik Tobias Dimmel Dresden, 24.05.2012 Agenda 1. Begriffe 2. Traveling Salesman Problem 3. Ameisenalgorithmus
Informatik, Angewandte Informatik, Technische Informationssysteme Dynamisches Routing in der Logistik Tobias Dimmel Dresden, 24.05.2012 Agenda 1. Begriffe 2. Traveling Salesman Problem 3. Ameisenalgorithmus
Zusammengefasst: Log-Distance-Pfadverlustmodell
 Zusammengefasst: Log-Distance-Pfadverlustmodell Hinzu kommt noch Abschattung und Atmosphärische Dämpfung Ein durch theoretische Überlegungen (z.b. Two-Ray-Ground-Überlegung) und empirische Belege (siehe
Zusammengefasst: Log-Distance-Pfadverlustmodell Hinzu kommt noch Abschattung und Atmosphärische Dämpfung Ein durch theoretische Überlegungen (z.b. Two-Ray-Ground-Überlegung) und empirische Belege (siehe
Improving the Accuracy of GPS
 Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Programmierung einer KI. SoPra 2017 Jenny Hotzkow
 Programmierung einer KI SoPra 2017 Jenny Hotzkow Model View Controller Client KI Integration in die Softwarearchitektur (1) KI Integration in die Softwarearchitektur (2) Command-Pattern // Bestimmung möglicher
Programmierung einer KI SoPra 2017 Jenny Hotzkow Model View Controller Client KI Integration in die Softwarearchitektur (1) KI Integration in die Softwarearchitektur (2) Command-Pattern // Bestimmung möglicher
Integrierte Kampagnenplanung. Netzwerken der chemischen Industrie
 Markus Meiler Integrierte Kampagnenplanung in logistischen Netzwerken der chemischen Industrie Mit einem Geleitwort von Prof. Dr. Hans-Otto Günther VA Springer Gabler RESEARCH Inhaltsverzeichnis IX Inhaltsverzeichnis
Markus Meiler Integrierte Kampagnenplanung in logistischen Netzwerken der chemischen Industrie Mit einem Geleitwort von Prof. Dr. Hans-Otto Günther VA Springer Gabler RESEARCH Inhaltsverzeichnis IX Inhaltsverzeichnis
Lernmodul 7 Algorithmus von Dijkstra
 Folie 1 von 30 Lernmodul 7 Algorithmus von Dijkstra Quelle: http://www.map24.de Folie 2 von 30 Algorithmus von Dijkstra Übersicht Kürzester Weg von A nach B in einem Graphen Problemstellung: Suche einer
Folie 1 von 30 Lernmodul 7 Algorithmus von Dijkstra Quelle: http://www.map24.de Folie 2 von 30 Algorithmus von Dijkstra Übersicht Kürzester Weg von A nach B in einem Graphen Problemstellung: Suche einer
Dynamische Programmierung
 Dynamische Programmierung Claudia Gerhold 9.5.6 Claudia Gerhold Dynamische Programmierung 9.5.6 / 4 Agenda Einführung Dynamische Programmierung Top-Down Ansatz mit Memoization Bottom-Up Ansatz 3 Anwendungsbeispiele
Dynamische Programmierung Claudia Gerhold 9.5.6 Claudia Gerhold Dynamische Programmierung 9.5.6 / 4 Agenda Einführung Dynamische Programmierung Top-Down Ansatz mit Memoization Bottom-Up Ansatz 3 Anwendungsbeispiele
Ant Colony Optimization (ACO)
") Ant Colony Optimization (ACO) Daniel Blum 24.4.2003 Projektgruppe 431 Metaheuristiken Lehrstuhl 11, Fachbereich Informatik, Universität Dortmund 1 Übersicht Vorbild Natur Übertragung der Ideen Beispiele
Ant Colony Optimization (ACO) Daniel Blum 24.4.2003 Projektgruppe 431 Metaheuristiken Lehrstuhl 11, Fachbereich Informatik, Universität Dortmund 1 Übersicht Vorbild Natur Übertragung der Ideen Beispiele
Distributed Algorithms. Image and Video Processing
 Chapter 6 Optical Character Recognition Distributed Algorithms for Übersicht Motivation Texterkennung in Bildern und Videos 1. Erkennung von Textregionen/Textzeilen 2. Segmentierung einzelner Buchstaben
Chapter 6 Optical Character Recognition Distributed Algorithms for Übersicht Motivation Texterkennung in Bildern und Videos 1. Erkennung von Textregionen/Textzeilen 2. Segmentierung einzelner Buchstaben
Zustandsraumsuche: Blinde und Heuristische Suche. Blinde und Heuristische Suche
 Zustandsraumsuche: Blinde und Heuristische Suche Einführung in die KI Übungsstunde am 01.11.04 Benmin Altmeyer 1 Heute im Angebot Was ist Suche? Suche als Probemlösung Zustandsraumsuche Vollständigkeit
Zustandsraumsuche: Blinde und Heuristische Suche Einführung in die KI Übungsstunde am 01.11.04 Benmin Altmeyer 1 Heute im Angebot Was ist Suche? Suche als Probemlösung Zustandsraumsuche Vollständigkeit
Aufgaben zur Klausurvorbereitung
 Vorlesung Graphen und Optimierung Sommersemester 2013/14 Prof. S. Lange Aufgaben zur Klausurvorbereitung Hier finden Sie eine Reihe von Übungsaufgaben, die wir an den beiden Vorlesungsterminen am 29.01.2014
Vorlesung Graphen und Optimierung Sommersemester 2013/14 Prof. S. Lange Aufgaben zur Klausurvorbereitung Hier finden Sie eine Reihe von Übungsaufgaben, die wir an den beiden Vorlesungsterminen am 29.01.2014
Wahlalgorithmen auf beliebigen Netzstrukturen. Verteilte Algorithmen (VA), WS 2003/04 43
, WS 2003/04 43") Wahlalgorithmen Überblick/Problemstellung Wahlalgorithmen auf Ringstrukturen Beispiel TokenRing Wahlalgorithmen auf Baumstrukturen Wahlalgorithmen auf beliebigen Netzstrukturen Verteilte Algorithmen (VA),
Wahlalgorithmen Überblick/Problemstellung Wahlalgorithmen auf Ringstrukturen Beispiel TokenRing Wahlalgorithmen auf Baumstrukturen Wahlalgorithmen auf beliebigen Netzstrukturen Verteilte Algorithmen (VA),
Einführung in die medizinische Bildverarbeitung WS 12/13
 Einführung in die medizinische Bildverarbeitung WS 12/13 Stephan Gimbel Kurze Wiederholung Pipeline Pipelinestufen können sich unterscheiden, beinhalten aber i.d.r. eine Stufe zur Bildvorverarbeitung zur
Einführung in die medizinische Bildverarbeitung WS 12/13 Stephan Gimbel Kurze Wiederholung Pipeline Pipelinestufen können sich unterscheiden, beinhalten aber i.d.r. eine Stufe zur Bildvorverarbeitung zur
Heuristische Verfahren
 Heuristische Verfahren Bei heuristischen Verfahren geht es darum in polynomieller Zeit eine Näherungslösung zu bekommen. Diese kann sehr gut oder sogar optimal sein, jedoch gibt es keine Garantie dafür.
Heuristische Verfahren Bei heuristischen Verfahren geht es darum in polynomieller Zeit eine Näherungslösung zu bekommen. Diese kann sehr gut oder sogar optimal sein, jedoch gibt es keine Garantie dafür.
Leistungsfähigkeit von Lokalisierungsverfahren im WLAN
 Leistungsfähigkeit von Lokalisierungsverfahren im WLAN Gliederung 1. Motivation 2. Möglichkeiten und Probleme WLAN Positionsbestimmung 3. Vorgehen a. Testumgebung b. Gerätschaften und Messungen c. Location
Leistungsfähigkeit von Lokalisierungsverfahren im WLAN Gliederung 1. Motivation 2. Möglichkeiten und Probleme WLAN Positionsbestimmung 3. Vorgehen a. Testumgebung b. Gerätschaften und Messungen c. Location
Motivation Algorithmen für Ad-hoc- und Sensornetze. Ad-hoc-Lösung: CSMA/CA. VL 10 Eine kurze Geschichte vom Färben
 Motivation Algorithmen für Ad-hoc- und Sensornetze VL 0 Eine kurze Geschichte vom Färben Dr. rer. nat. Bastian Katz. Juli 009 (Version vom. Juli 009) Kommunikation im drahtlosen Kanal ist nicht beliebig
Motivation Algorithmen für Ad-hoc- und Sensornetze VL 0 Eine kurze Geschichte vom Färben Dr. rer. nat. Bastian Katz. Juli 009 (Version vom. Juli 009) Kommunikation im drahtlosen Kanal ist nicht beliebig
Literatur. Dominating Set (DS) Dominating Sets in Sensornetzen. Problem Minimum Dominating Set (MDS)
 Dominating Sets in Sensornetzen. Problem Minimum Dominating Set (MDS)") Dominating Set 59 Literatur Dominating Set Grundlagen 60 Dominating Set (DS) M. V. Marathe, H. Breu, H.B. Hunt III, S. S. Ravi, and D. J. Rosenkrantz: Simple Heuristics for Unit Disk Graphs. Networks 25,
Dominating Set 59 Literatur Dominating Set Grundlagen 60 Dominating Set (DS) M. V. Marathe, H. Breu, H.B. Hunt III, S. S. Ravi, and D. J. Rosenkrantz: Simple Heuristics for Unit Disk Graphs. Networks 25,
UNABHÄNGIGER LASTEN. Vorlesung 9 BALANCIERUNG DYNAMISCHER. Graphenalgorithmen und lineare Algebra Hand in Hand
 Vorlesung 9 BALANCIERUNG DYNAMISCHER UNABHÄNGIGER LASTEN 266 Lastbalancierung Motivation! Ein paralleles System besteht aus! verschiedenen Recheneinheiten,! die miteinander kommunizieren können! Warum
Vorlesung 9 BALANCIERUNG DYNAMISCHER UNABHÄNGIGER LASTEN 266 Lastbalancierung Motivation! Ein paralleles System besteht aus! verschiedenen Recheneinheiten,! die miteinander kommunizieren können! Warum
Abstandsmessung mit Schall und Funk
 Abstandsmessung mit Schall und Funk Steven Fluck (steven@student.ethz.ch) Fachseminar: Verteilte Systeme SS2006 Betreuer: Kay Römer 1 Motivation und Einleitung Die meisten Lokalisierungstechniken basieren
Abstandsmessung mit Schall und Funk Steven Fluck (steven@student.ethz.ch) Fachseminar: Verteilte Systeme SS2006 Betreuer: Kay Römer 1 Motivation und Einleitung Die meisten Lokalisierungstechniken basieren
Anfrageoptimierung Kostenabschätzung
 Institute for Web Science & Technologies WeST Grundlagen der Datenbanken Kostenabschätzung Dr. Thomas Gottron Wintersemester 2012/13 Regel vs. Kostenbasierte Optimierung Bisher: Regeln, wie Optimierung
Institute for Web Science & Technologies WeST Grundlagen der Datenbanken Kostenabschätzung Dr. Thomas Gottron Wintersemester 2012/13 Regel vs. Kostenbasierte Optimierung Bisher: Regeln, wie Optimierung
Approximationsalgorithmen
 Approximationsalgorithmen 1. Vorlesung Joachim Spoerhase Alexander Wolff Lehrstuhl für Informatik I Wintersemester 2017/18 Bücher zur Vorlesung Vijay V. Vazirani Approximation Algorithms Springer-Verlag
Approximationsalgorithmen 1. Vorlesung Joachim Spoerhase Alexander Wolff Lehrstuhl für Informatik I Wintersemester 2017/18 Bücher zur Vorlesung Vijay V. Vazirani Approximation Algorithms Springer-Verlag
Algorithmen für Ad-hoc- und Sensornetze VL 10 Eine kurze Geschichte vom Färben
 Algorithmen für Ad-hoc- und Sensornetze VL 0 Eine kurze Geschichte vom Färben Dr. rer. nat. Bastian Katz. Juli 2009 (Version 3 vom 3. Juli 2009) Motivation Kommunikation im drahtlosen Kanal ist nicht beliebig
Algorithmen für Ad-hoc- und Sensornetze VL 0 Eine kurze Geschichte vom Färben Dr. rer. nat. Bastian Katz. Juli 2009 (Version 3 vom 3. Juli 2009) Motivation Kommunikation im drahtlosen Kanal ist nicht beliebig
MAC-Layer-Protokolle. Your Name Your Title. Hauptseminar Kommunikation in drahtlosen Sensornetzen
 MAC-Layer-Protokolle Hauptseminar Kommunikation in drahtlosen Sensornetzen 2005-12-31 Your Name Your Title Christian Fehler Your Organization (Line #1) Your Organization (Line #2) Übersicht Einleitung
MAC-Layer-Protokolle Hauptseminar Kommunikation in drahtlosen Sensornetzen 2005-12-31 Your Name Your Title Christian Fehler Your Organization (Line #1) Your Organization (Line #2) Übersicht Einleitung
Lokalisierungsverfahren für drahtlose Sensornetzwerke
 Lokalisierungsverfahren für drahtlose Sensornetzwerke Prof. Dr. Fachhochschule Forschungsschwerpunkt: Mobile Business Mobile Systems Lokalisierungsverfahren für drahtlose Sensornetzwerke Inhalt Drahtlose
Lokalisierungsverfahren für drahtlose Sensornetzwerke Prof. Dr. Fachhochschule Forschungsschwerpunkt: Mobile Business Mobile Systems Lokalisierungsverfahren für drahtlose Sensornetzwerke Inhalt Drahtlose
Zwischenpräsentation zur Diplomarbeit DES-Mesh Knotenlokalisierung mittels AFL- Algorithmus
 Zwischenpräsentation zur Diplomarbeit DES-Mesh Knotenlokalisierung mittels AFL- Algorithmus Steffen Gliech Computer Systems and Telematics Institute of Computer Science Freie Universität Berlin http://cst.mi.fu-berlin.de
Zwischenpräsentation zur Diplomarbeit DES-Mesh Knotenlokalisierung mittels AFL- Algorithmus Steffen Gliech Computer Systems and Telematics Institute of Computer Science Freie Universität Berlin http://cst.mi.fu-berlin.de
Algorithmen für Ad-hoc- und Sensornetze
 Algorithmen für Ad-hoc- und Sensornetze Übung 2 Greedy Routing Fabian Fuchs 05. November 2015 (Version 1) INSTITUT FÜR THEORETISCHE INFORMATIK - LEHRSTUHL FÜR ALGORITHMIK (PROF. WAGNER) KIT Universität
Algorithmen für Ad-hoc- und Sensornetze Übung 2 Greedy Routing Fabian Fuchs 05. November 2015 (Version 1) INSTITUT FÜR THEORETISCHE INFORMATIK - LEHRSTUHL FÜR ALGORITHMIK (PROF. WAGNER) KIT Universität
Numerische Methoden und Algorithmen in der Physik
 Numerische Methoden und Algorithmen in der Physik Hartmut Stadie, Christian Autermann 15.01.2009 Numerische Methoden und Algorithmen in der Physik Christian Autermann 1/ 47 Methode der kleinsten Quadrate
Numerische Methoden und Algorithmen in der Physik Hartmut Stadie, Christian Autermann 15.01.2009 Numerische Methoden und Algorithmen in der Physik Christian Autermann 1/ 47 Methode der kleinsten Quadrate
Einführung in die medizinische Bildverarbeitung WS 12/13
 Einführung in die medizinische Bildverarbeitung WS 12/13 Stephan Gimbel Kurze Wiederholung Landmarkenbasierte anhand anatomischer Punkte interaktiv algorithmisch z.b. zur Navigation im OP Markierung von
Einführung in die medizinische Bildverarbeitung WS 12/13 Stephan Gimbel Kurze Wiederholung Landmarkenbasierte anhand anatomischer Punkte interaktiv algorithmisch z.b. zur Navigation im OP Markierung von
Approximationsalgorithmen. 19. Dezember / 28
 Approximationsalgorithmen 19. Dezember 2017 1 / 28 Optimierungsprobleme Das Ziel: Bearbeite schwierige Optimierungsprobleme der Form opt y f (x, y) so dass L(x, y). Die Zielfunktion f (x, y) ist zu minimieren
Approximationsalgorithmen 19. Dezember 2017 1 / 28 Optimierungsprobleme Das Ziel: Bearbeite schwierige Optimierungsprobleme der Form opt y f (x, y) so dass L(x, y). Die Zielfunktion f (x, y) ist zu minimieren
Teil II Optimierung. Modellgestützte Analyse und Optimierung Kap. 5 Einführung Optimierung. Peter Buchholz 2006
 Teil II Optimierung Gliederung 5 Einführung, Klassifizierung und Grundlagen 6 Lineare Optimierung 7 Nichtlineare Optimierung 8 Dynamische Optimierung (dieses Jahr nur recht kurz) (9 Stochastische Optimierungsmethoden
Teil II Optimierung Gliederung 5 Einführung, Klassifizierung und Grundlagen 6 Lineare Optimierung 7 Nichtlineare Optimierung 8 Dynamische Optimierung (dieses Jahr nur recht kurz) (9 Stochastische Optimierungsmethoden
Entwicklung einer hp-fast-multipole-
 Entwicklung einer hp-fast-multipole- Boundary-Elemente-Methode Übersicht: 1. Motivation 2. Theoretische Grundlagen a) Boundary-Elemente-Methode b) Fast-Multipole-Methode 3. Erweiterungen a) Elementordnung
Entwicklung einer hp-fast-multipole- Boundary-Elemente-Methode Übersicht: 1. Motivation 2. Theoretische Grundlagen a) Boundary-Elemente-Methode b) Fast-Multipole-Methode 3. Erweiterungen a) Elementordnung
Lokalisierung in Sensornetzen
 Lokalisierung in Sensornetzen Mögliche Ansätze Proseminar Technische Informatik SS 2007 Von Sebastian Rist rist@informatik.unituebingen.de Betreuer: Jürgen Sommer Inhaltsverzeichnis 1. Motivation... 4
Lokalisierung in Sensornetzen Mögliche Ansätze Proseminar Technische Informatik SS 2007 Von Sebastian Rist rist@informatik.unituebingen.de Betreuer: Jürgen Sommer Inhaltsverzeichnis 1. Motivation... 4
Algorithmen für Ad-hoc- und Sensornetze
 Algorithmen für Ad-hoc- und Sensornetze VL 07 Data Gathering Markus Völker 06. Juni 2012 (Version 2) INSTITUT FÜR THEORETISCHE INFORMATIK - LEHRSTUHL FÜR ALGORITHMIK (PROF. WAGNER) KIT Universität des
Algorithmen für Ad-hoc- und Sensornetze VL 07 Data Gathering Markus Völker 06. Juni 2012 (Version 2) INSTITUT FÜR THEORETISCHE INFORMATIK - LEHRSTUHL FÜR ALGORITHMIK (PROF. WAGNER) KIT Universität des
11. Übung zu Algorithmen I 6. Juli 2016
 11. Übung zu Algorithmen I 6. Juli 2016 Lisa Kohl lisa.kohl@kit.edu mit Folien von Lukas Barth Roadmap Ausblick: Was sind schwierige Probleme? Travelling Salesman Problem - Reprise ein ILP ein Algorithmus
11. Übung zu Algorithmen I 6. Juli 2016 Lisa Kohl lisa.kohl@kit.edu mit Folien von Lukas Barth Roadmap Ausblick: Was sind schwierige Probleme? Travelling Salesman Problem - Reprise ein ILP ein Algorithmus
Bestimmung von MIMO-Kanalkapazitäten für unterschiedliche Antennenarchitekturen auf der Basis von breitbandigen Ausbreitungsmessungen
 Bestimmung von MIMO-Kanalkapazitäten für unterschiedliche Antennenarchitekturen auf der Basis von breitbandigen Ausbreitungsmessungen Dirk Hampicke, Markus Landmann, Andreas Richter, Christian Schneider,
Bestimmung von MIMO-Kanalkapazitäten für unterschiedliche Antennenarchitekturen auf der Basis von breitbandigen Ausbreitungsmessungen Dirk Hampicke, Markus Landmann, Andreas Richter, Christian Schneider,
Analyse eines zweistufigen, regionalen Clusteralgorithmus am Beispiel der Verbundenen Wohngebäudeversicherung
 Analyse eines zweistufigen, regionalen Clusteralgorithmus am Beispiel der Verbundenen Wohngebäudeversicherung Zusammenfassung der Diplomarbeit an der Hochschule Zittau/Görlitz Maria Kiseleva Motivation
Analyse eines zweistufigen, regionalen Clusteralgorithmus am Beispiel der Verbundenen Wohngebäudeversicherung Zusammenfassung der Diplomarbeit an der Hochschule Zittau/Görlitz Maria Kiseleva Motivation
Algorithmen für Geographische Informationssysteme
 Algorithmen für Geographische Informationssysteme 2. Vorlesung: 16. April 2014 Thomas van Dijk basiert auf Folien von Jan-Henrik Haunert Map Matching? Map Matching! Map Matching...als Teil von Fahrzeugnavigationssystemen
Algorithmen für Geographische Informationssysteme 2. Vorlesung: 16. April 2014 Thomas van Dijk basiert auf Folien von Jan-Henrik Haunert Map Matching? Map Matching! Map Matching...als Teil von Fahrzeugnavigationssystemen
Schnittebenenverfahren für das symmetrische
 Schnittebenenverfahren für das symmetrische TSP Sebastian Peetz Mathematisches Institut Universität Bayreuth 19. Januar 2007 / Blockseminar Ganzzahlige Optimierung, Bayreuth Gliederung 1 Das symmetrische
Schnittebenenverfahren für das symmetrische TSP Sebastian Peetz Mathematisches Institut Universität Bayreuth 19. Januar 2007 / Blockseminar Ganzzahlige Optimierung, Bayreuth Gliederung 1 Das symmetrische
5.4 Das Rucksackproblem
 Problemstellung: 5.4 Das Rucksackproblem Eingabe: Ganzzahlige Volumina a 1,..., a n > 0, Nutzenwerte c 1,..., c n > 0, ganzzahlige Volumenschranke b. Aufgabe: Packe die Objekte in einen Rucksack von Volumen
Problemstellung: 5.4 Das Rucksackproblem Eingabe: Ganzzahlige Volumina a 1,..., a n > 0, Nutzenwerte c 1,..., c n > 0, ganzzahlige Volumenschranke b. Aufgabe: Packe die Objekte in einen Rucksack von Volumen
Übung zu Drahtlose Kommunikation. 4. Übung
 Übung zu Drahtlose Kommunikation 4. Übung 12.11.2012 Aufgabe 1 Erläutern Sie die Begriffe Nah- und Fernfeld! Nahfeld und Fernfeld beschreiben die elektrischen und magnetischen Felder und deren Wechselwirkungen
Übung zu Drahtlose Kommunikation 4. Übung 12.11.2012 Aufgabe 1 Erläutern Sie die Begriffe Nah- und Fernfeld! Nahfeld und Fernfeld beschreiben die elektrischen und magnetischen Felder und deren Wechselwirkungen
Der diskrete Kalman Filter
 Der diskrete Kalman Filter Fachbereich: Informatik Betreuer: Marc Drassler Patrick Winkler 1168954 6. Dezember 2004 Technische Universität Darmstadt Simulation und Systemoptimierung Darmstadt Dribbling
Der diskrete Kalman Filter Fachbereich: Informatik Betreuer: Marc Drassler Patrick Winkler 1168954 6. Dezember 2004 Technische Universität Darmstadt Simulation und Systemoptimierung Darmstadt Dribbling
Minimal spannende Bäume
 http://www.uni-magdeburg.de/harbich/ Minimal spannende Fakultät für Informatik Otto-von-Guericke-Universität 2 Inhalt Definition Wege Untergraphen Kantengewichtete Graphen Minimal spannende Algorithmen
http://www.uni-magdeburg.de/harbich/ Minimal spannende Fakultät für Informatik Otto-von-Guericke-Universität 2 Inhalt Definition Wege Untergraphen Kantengewichtete Graphen Minimal spannende Algorithmen
Einführung in Heuristische Suche
 Einführung in Heuristische Suche Beispiele 2 Überblick Intelligente Suche Rundenbasierte Spiele 3 Grundlagen Es muss ein Rätsel / Puzzle / Problem gelöst werden Wie kann ein Computer diese Aufgabe lösen?
Einführung in Heuristische Suche Beispiele 2 Überblick Intelligente Suche Rundenbasierte Spiele 3 Grundlagen Es muss ein Rätsel / Puzzle / Problem gelöst werden Wie kann ein Computer diese Aufgabe lösen?
Mustererkennung. Übersicht. Unüberwachtes Lernen. (Un-) Überwachtes Lernen Clustering im Allgemeinen k-means-verfahren Gaussian-Mixture Modelle
 Überwachtes Lernen Clustering im Allgemeinen k-means-verfahren Gaussian-Mixture Modelle") Mustererkennung Unüberwachtes Lernen R. Neubecker, WS 01 / 01 Übersicht (Un-) Überwachtes Lernen Clustering im Allgemeinen k-means-verfahren 1 Lernen Überwachtes Lernen Zum Training des Klassifikators
Mustererkennung Unüberwachtes Lernen R. Neubecker, WS 01 / 01 Übersicht (Un-) Überwachtes Lernen Clustering im Allgemeinen k-means-verfahren 1 Lernen Überwachtes Lernen Zum Training des Klassifikators
Algorithmen zur Visualisierung von Graphen
 Algorithmen zur Visualisierung von Graphen Kombinatorische Optimierung mittels Flussmethoden II Vorlesung im Wintersemester 2011/2012 10.11.2011 Orthogonale Zeichnungen II letztes Mal: Satz G Maxgrad-4-Graph
Algorithmen zur Visualisierung von Graphen Kombinatorische Optimierung mittels Flussmethoden II Vorlesung im Wintersemester 2011/2012 10.11.2011 Orthogonale Zeichnungen II letztes Mal: Satz G Maxgrad-4-Graph
Fortgeschrittene Netzwerk- und Graph-Algorithmen
 Fortgeschrittene Netzwerk- und Graph-Algorithmen Prof. Dr. Hanjo Täubig Lehrstuhl für Effiziente Algorithmen (Prof. Dr. Ernst W. Mayr) Institut für Informatik Technische Universität München Wintersemester
Fortgeschrittene Netzwerk- und Graph-Algorithmen Prof. Dr. Hanjo Täubig Lehrstuhl für Effiziente Algorithmen (Prof. Dr. Ernst W. Mayr) Institut für Informatik Technische Universität München Wintersemester
Die Notwendigkeit von GNSS Interference Monitoring in Österreich
 Die Notwendigkeit von GNSS Interference Monitoring in Österreich Sascha Bartl, BSc TeleConsult Austria GmbH (Graz, Austria) AHORN 2014 der Alpenraum und seine Herausforderungen im Bereich Orientierung,
Die Notwendigkeit von GNSS Interference Monitoring in Österreich Sascha Bartl, BSc TeleConsult Austria GmbH (Graz, Austria) AHORN 2014 der Alpenraum und seine Herausforderungen im Bereich Orientierung,
Algorithmen und Komplexität
 Algorithmen und Komplexität Dynamische Programmierung Markus Ullrich Norbert Baum Fachbereich Informatik - IIb07 Hochschule Zittau/Görlitz 28. Mai 2009 1 / 29 Wie sieht es mit langen Ketten aus? A 1 A
Algorithmen und Komplexität Dynamische Programmierung Markus Ullrich Norbert Baum Fachbereich Informatik - IIb07 Hochschule Zittau/Görlitz 28. Mai 2009 1 / 29 Wie sieht es mit langen Ketten aus? A 1 A
12. Flächenrekonstruktion aus 3D-Punktwolken und generalisierte Voronoi-Diagramme
 12. Flächenrekonstruktion aus 3D-Punktwolken und generalisierte Voronoi-Diagramme (Einfache) Voronoi-Diagramme: Motivation: gegeben: Raum R, darin Menge S von Objekten Frage nach Zerlegung von R in "Einflusszonen"
12. Flächenrekonstruktion aus 3D-Punktwolken und generalisierte Voronoi-Diagramme (Einfache) Voronoi-Diagramme: Motivation: gegeben: Raum R, darin Menge S von Objekten Frage nach Zerlegung von R in "Einflusszonen"
f h c 7 a 1 b 1 g 2 2 d
 ) Man bestimme mit Hilfe des Dijkstra-Algorithmus einen kürzesten Weg von a nach h: c 7 a b f 5 h 3 4 5 i e 6 g 2 2 d Beim Dijkstra-Algorithmus wird in jedem Schritt von den noch unmarkierten Knoten jener
) Man bestimme mit Hilfe des Dijkstra-Algorithmus einen kürzesten Weg von a nach h: c 7 a b f 5 h 3 4 5 i e 6 g 2 2 d Beim Dijkstra-Algorithmus wird in jedem Schritt von den noch unmarkierten Knoten jener
Optimierung. Vorlesung 04
 Optimierung Vorlesung 04 Übungsbetrieb Mangels Teilnehmer keine Dienstagsübung mehr. Prüfung laut Paul: Di, 10. Feb. 2015 00:01-23:59 2 Was bisher geschah LP: Maximiere c T x unter Ax = b, x 0. Basis:
Optimierung Vorlesung 04 Übungsbetrieb Mangels Teilnehmer keine Dienstagsübung mehr. Prüfung laut Paul: Di, 10. Feb. 2015 00:01-23:59 2 Was bisher geschah LP: Maximiere c T x unter Ax = b, x 0. Basis:
Lineare Differenzengleichungen
 Lineare Differenzengleichungen Die Fibonacci-Zahlen F n sind definiert durch F 0 = 0 F 1 = 1 F n = F n 1 +F n 2 für n >= 2 Die letzte Zeile ist ein Beispiel für eine homogene lineare Differenzengleichung
Lineare Differenzengleichungen Die Fibonacci-Zahlen F n sind definiert durch F 0 = 0 F 1 = 1 F n = F n 1 +F n 2 für n >= 2 Die letzte Zeile ist ein Beispiel für eine homogene lineare Differenzengleichung
Grundlagen zur Delaunay-Triangulierung und zur konvexen Hülle. zum Begriff des Voronoi-Diagramms (vgl. auch Vorlesung "Algorithmische Geometrie"):
:") Grundlagen zur Delaunay-Triangulierung und zur konvexen Hülle zum Begriff des Voronoi-Diagramms (vgl. auch Vorlesung "Algorithmische Geometrie"): 1 Erzeugung des Voronoi-Diagramms (siehe Vorlesung "Algorithmische
Grundlagen zur Delaunay-Triangulierung und zur konvexen Hülle zum Begriff des Voronoi-Diagramms (vgl. auch Vorlesung "Algorithmische Geometrie"): 1 Erzeugung des Voronoi-Diagramms (siehe Vorlesung "Algorithmische
Routing A lgorithmen Algorithmen Begriffe, Definitionen Wegewahl Verkehrslenkung
 Begriffe, Definitionen Routing (aus der Informatik) Wegewahl oder Verkehrslenkung bezeichnet in der Telekommunikation das Festlegen von Wegen für Nachrichtenströme bei der Nachrichtenübermittlung über
Begriffe, Definitionen Routing (aus der Informatik) Wegewahl oder Verkehrslenkung bezeichnet in der Telekommunikation das Festlegen von Wegen für Nachrichtenströme bei der Nachrichtenübermittlung über
Eigenwerte und Eigenvektoren
 Eigenwerte und Eigenvektoren Siehe Analysis (von der Hude, Folie 20: Definition 2.3. Ein Vektor x R n heißt Eigenvektor der quadratischen n n-matrix A zum Eigenwert λ R, wenn gilt Ax = λx Die Eigenwerte
Eigenwerte und Eigenvektoren Siehe Analysis (von der Hude, Folie 20: Definition 2.3. Ein Vektor x R n heißt Eigenvektor der quadratischen n n-matrix A zum Eigenwert λ R, wenn gilt Ax = λx Die Eigenwerte
Grundlagen Datenstrukturen Transitive Hülle Traversierung Kürzeste Wege Spannender Baum Max. Fluss Zuordnungen. 6. Graphen
 . Graphen viele praktische (Optimierungs-)Probleme sind als graphentheoretische Probleme formulierbar z.b. in Produktionsplanung, Personaleinsatzplanung,.... Grundlagen gerichteter, ungerichteter und gewichteter
. Graphen viele praktische (Optimierungs-)Probleme sind als graphentheoretische Probleme formulierbar z.b. in Produktionsplanung, Personaleinsatzplanung,.... Grundlagen gerichteter, ungerichteter und gewichteter
Algorithmen zur Visualisierung von Graphen
 Algorithmen zur Visualisierung von Graphen Einführung 1. Vorlesung Sommersemester 2014 (basierend auf Folien von Martin Nöllenburg und Robert Görke, KIT) Organisatorisches Dozent Philipp Kindermann Büro
Algorithmen zur Visualisierung von Graphen Einführung 1. Vorlesung Sommersemester 2014 (basierend auf Folien von Martin Nöllenburg und Robert Görke, KIT) Organisatorisches Dozent Philipp Kindermann Büro
Von Aachen nach Halle...
 Von Aachen nach Halle... Koeln? Aachen Halle 14. 6. 15. 6. 16. 6. Saarbruecken? Effiziente Algorithmen fr Graphtraversierungen Ulrich Meyer p. 3 Von Aachen nach Halle... Koeln? Aachen Halle 14. 6. 15.
Von Aachen nach Halle... Koeln? Aachen Halle 14. 6. 15. 6. 16. 6. Saarbruecken? Effiziente Algorithmen fr Graphtraversierungen Ulrich Meyer p. 3 Von Aachen nach Halle... Koeln? Aachen Halle 14. 6. 15.
Simultane Mehrgleichungssysteme: Parameterschätzung
 Simultane Mehrgleichungssysteme: Parameterschätzung Stichwörter: Eigenschaften des OLS-Schätzers Hilfsvariablenschätzer 2SLS limited information Methoden 3SLS FIML full information Methoden o1-21.tex/0
Simultane Mehrgleichungssysteme: Parameterschätzung Stichwörter: Eigenschaften des OLS-Schätzers Hilfsvariablenschätzer 2SLS limited information Methoden 3SLS FIML full information Methoden o1-21.tex/0
Das Problem des Handlungsreisenden
 Seite 1 Das Problem des Handlungsreisenden Abbildung 1: Alle möglichen Rundreisen für 4 Städte Das TSP-Problem tritt in der Praxis in vielen Anwendungen als Teilproblem auf. Hierzu gehören z.b. Optimierungsprobleme
Seite 1 Das Problem des Handlungsreisenden Abbildung 1: Alle möglichen Rundreisen für 4 Städte Das TSP-Problem tritt in der Praxis in vielen Anwendungen als Teilproblem auf. Hierzu gehören z.b. Optimierungsprobleme
Vorkurs Informatik WiSe 16/17
 Institut für Programmierung Konzepte der Informatik Dr. Werner Struckmann / Stephan Mielke, Jakob Garbe, 12.10.2016 Technische Universität Braunschweig, IPS Inhaltsverzeichnis Schilda-Rallye Was steckt
Institut für Programmierung Konzepte der Informatik Dr. Werner Struckmann / Stephan Mielke, Jakob Garbe, 12.10.2016 Technische Universität Braunschweig, IPS Inhaltsverzeichnis Schilda-Rallye Was steckt
7. Übungs-/Wiederholungsblatt zu Einführung in die Numerik (SS 2012)
") Technische Universität München Zentrum Mathematik, M1 Prof. Dr. Boris Vexler Dr. Ira Neitzel Dipl.-Math. Alana Kirchner 7. Übungs-/Wiederholungsblatt zu Einführung in die Numerik (SS 2012) Diese Auswahl
Technische Universität München Zentrum Mathematik, M1 Prof. Dr. Boris Vexler Dr. Ira Neitzel Dipl.-Math. Alana Kirchner 7. Übungs-/Wiederholungsblatt zu Einführung in die Numerik (SS 2012) Diese Auswahl
Lokalisierung von inneren und äußeren Grenzen in Sensornetzwerken
 Lokalisierung von inneren und äußeren Grenzen in Sensornetzwerken Thomas Gramer Karlsruhe Institute of Technology (KIT), 76128 Karlsruhe, Germany, thomas.gramer@ira.uka.de 1 Einleitung Eine Möglichkeit
Lokalisierung von inneren und äußeren Grenzen in Sensornetzwerken Thomas Gramer Karlsruhe Institute of Technology (KIT), 76128 Karlsruhe, Germany, thomas.gramer@ira.uka.de 1 Einleitung Eine Möglichkeit
Routing Algorithmen. Begriffe, Definitionen
 Begriffe, Definitionen Routing (aus der Informatik) Wegewahl oder Verkehrslenkung bezeichnet in der Telekommunikation das Festlegen von Wegen für Nachrichtenströme bei der Nachrichtenübermittlung über
Begriffe, Definitionen Routing (aus der Informatik) Wegewahl oder Verkehrslenkung bezeichnet in der Telekommunikation das Festlegen von Wegen für Nachrichtenströme bei der Nachrichtenübermittlung über
mit Ungleichungen als Restriktionen Quadratische Programmierung Gliederung Geodätische Woche 2009 Lutz Roese-Koerner und Wolf-Dieter Schuh
 . Geodätische Woche 29 Quadratische Programmierung mit Ungleichungen als Restriktionen 1 Lutz Roese-Koerner und Wolf-Dieter Schuh Institut für Geodäsie und Geoinformation Professur für Theoretische Geodäsie
. Geodätische Woche 29 Quadratische Programmierung mit Ungleichungen als Restriktionen 1 Lutz Roese-Koerner und Wolf-Dieter Schuh Institut für Geodäsie und Geoinformation Professur für Theoretische Geodäsie
Optimierung für Wirtschaftsinformatiker: Dualität, Ganzzahlige lineare Optimierung
 Optimierung für Wirtschaftsinformatiker: Dualität, Ganzzahlige lineare Optimierung Dr. Nico Düvelmeyer Freitag, 24. Juni 2011 1: 1 [1,1] Inhaltsübersicht für heute 1 Dualität Motivation Duales LP Dualitätssätze
Optimierung für Wirtschaftsinformatiker: Dualität, Ganzzahlige lineare Optimierung Dr. Nico Düvelmeyer Freitag, 24. Juni 2011 1: 1 [1,1] Inhaltsübersicht für heute 1 Dualität Motivation Duales LP Dualitätssätze
4. Segmentierung von Objekten Video - Inhaltsanalyse
 4. Segmentierung von Objekten Video - Inhaltsanalyse Stephan Kopf Inhalt Vorgehensweise Berechnung der Kamerabewegungen zwischen beliebigen Bildern Transformation eines Bildes Hintergrundbilder / Panoramabilder
4. Segmentierung von Objekten Video - Inhaltsanalyse Stephan Kopf Inhalt Vorgehensweise Berechnung der Kamerabewegungen zwischen beliebigen Bildern Transformation eines Bildes Hintergrundbilder / Panoramabilder
Logistik: Transport. Grundlagen, lineare Transportund Umladeprobleme. Von Dr. Wolfgang Domschke. o. Professor für Betriebswirtschaftslehre
 Logistik: Transport Grundlagen, lineare Transportund Umladeprobleme Von Dr. Wolfgang Domschke o. Professor für Betriebswirtschaftslehre Zweite, ergänzte Auflage TECHNISCH!: MOC cchule DARiviSTAOT j P e
Logistik: Transport Grundlagen, lineare Transportund Umladeprobleme Von Dr. Wolfgang Domschke o. Professor für Betriebswirtschaftslehre Zweite, ergänzte Auflage TECHNISCH!: MOC cchule DARiviSTAOT j P e
Dirk Mattfeld Richard Vahrenkamp. Logistiknetzwerke. Modelle für Standortwahl. und Tourenplanung. 2., aktualisierte und überarbeitete Auflage
 Dirk Mattfeld Richard Vahrenkamp Logistiknetzwerke Modelle für Standortwahl und Tourenplanung 2., aktualisierte und überarbeitete Auflage 4^ Springer Gabler Inhaltsverzeichnis Vorwort zur 2. Auflage Vorwort
Dirk Mattfeld Richard Vahrenkamp Logistiknetzwerke Modelle für Standortwahl und Tourenplanung 2., aktualisierte und überarbeitete Auflage 4^ Springer Gabler Inhaltsverzeichnis Vorwort zur 2. Auflage Vorwort
Sandro Pirkwieser, (Bin Hu, Jakob Puchinger) SS 2010
 SS 2010") Lösungsverfahren für Ganzzahlige Optimierung Sandro Pirkwieser, (Bin Hu, Jakob Puchinger) Fortgeschrittene Algorithmen und Datenstrukturen Arbeitsbereich für Algorithmen und Datenstrukturen Institut für
Lösungsverfahren für Ganzzahlige Optimierung Sandro Pirkwieser, (Bin Hu, Jakob Puchinger) Fortgeschrittene Algorithmen und Datenstrukturen Arbeitsbereich für Algorithmen und Datenstrukturen Institut für
1) Gegeben Sei der auf der rechten Seite beschriebene Prozess mit folgenden globalen Deklarationen. const int N := 4; chan c[n]; int wert := 0;
![1) Gegeben Sei der auf der rechten Seite beschriebene Prozess mit folgenden globalen Deklarationen. const int N := 4; chan c[n]; int wert := 0;](/thumbs/69/60524630.jpg "1) Gegeben Sei der auf der rechten Seite beschriebene Prozess mit folgenden globalen Deklarationen. const int N := 4; chan c[n]; int wert := 0;") 1) Gegeben Sei der auf der rechten Seite beschriebene Prozess mit folgenden globalen Deklarationen. const int N := 4; chan c[n]; int wert := 0; Weiterhin hat der Prozess folgende lokale Deklaration. void
1) Gegeben Sei der auf der rechten Seite beschriebene Prozess mit folgenden globalen Deklarationen. const int N := 4; chan c[n]; int wert := 0; Weiterhin hat der Prozess folgende lokale Deklaration. void
Clusteranalyse für Netzwerke
 Alexandra Rebecca Klages Clusteranalyse für Netzwerke PETER LANG Internationaler Verlag der Wissenschaften Inhaltsverzeichnis 1 Einleitung 1 2 Grundlagen 7 2.1 Netzwerktheorie 7 2.1.1 Definitionen 7 2.1.2
Alexandra Rebecca Klages Clusteranalyse für Netzwerke PETER LANG Internationaler Verlag der Wissenschaften Inhaltsverzeichnis 1 Einleitung 1 2 Grundlagen 7 2.1 Netzwerktheorie 7 2.1.1 Definitionen 7 2.1.2
Unterbrechungstolerante drahtlose Sensornetze. Georg von Zengen
 Unterbrechungstolerante drahtlose Sensornetze µdtn Georg von Zengen Gliederung Einleitung Umsetzung Evaluation Zusammenfassung Georg von Zengen µdtn 2 Gliederung Einleitung Umsetzung Evaluation Zusammenfassung
Unterbrechungstolerante drahtlose Sensornetze µdtn Georg von Zengen Gliederung Einleitung Umsetzung Evaluation Zusammenfassung Georg von Zengen µdtn 2 Gliederung Einleitung Umsetzung Evaluation Zusammenfassung
Ortsbestimmung und Ortsmodelle
 Ortsbestimmung und Ortsmodelle Distributed Systems Seminar Thomas Gloor Betreuer: Christian Frank Aufteilung Teil 1: Ortsbestimmung am Beispiel von Place Lab Thomas Gloor Teil 2: Ortsmodelle und ihre Anwendungen
Ortsbestimmung und Ortsmodelle Distributed Systems Seminar Thomas Gloor Betreuer: Christian Frank Aufteilung Teil 1: Ortsbestimmung am Beispiel von Place Lab Thomas Gloor Teil 2: Ortsmodelle und ihre Anwendungen




Algorithmische Methoden zur Netzwerkanalyse
 Algorithmische Methoden zur Netzwerkanalyse Prof. Dr. Henning Meyerhenke Institut für Theoretische Informatik 1 KIT Henning Universität desmeyerhenke, Landes Baden-Württemberg Institutund für Theoretische
Algorithmische Methoden zur Netzwerkanalyse Prof. Dr. Henning Meyerhenke Institut für Theoretische Informatik 1 KIT Henning Universität desmeyerhenke, Landes Baden-Württemberg Institutund für Theoretische
Erweiterung eines Verfahrens zur automatisierten Parameteridentifikation eines Fahrzeugmodells
 Erweiterung eines Verfahrens zur automatisierten Parameteridentifikation eines Fahrzeugmodells Sebastian Wildfeuer Parameteridentifikation > 23. September 2008 > Folie 1 Themenübersicht Ausgangssituation,
Erweiterung eines Verfahrens zur automatisierten Parameteridentifikation eines Fahrzeugmodells Sebastian Wildfeuer Parameteridentifikation > 23. September 2008 > Folie 1 Themenübersicht Ausgangssituation,
Fortgeschrittene Netzwerk- und Graph-Algorithmen
 Fortgeschrittene Netzwerk- und Graph-Algorithmen Prof. Dr. Hanjo Täubig Lehrstuhl für Effiziente Algorithmen (Prof. Dr. Ernst W. Mayr) Institut für Informatik Technische Universität München Wintersemester
Fortgeschrittene Netzwerk- und Graph-Algorithmen Prof. Dr. Hanjo Täubig Lehrstuhl für Effiziente Algorithmen (Prof. Dr. Ernst W. Mayr) Institut für Informatik Technische Universität München Wintersemester
Theoretische Informatik 1
 Theoretische Informatik 1 Approximierbarkeit David Kappel Institut für Grundlagen der Informationsverarbeitung Technische Universität Graz 10.06.2016 Übersicht Das Problem des Handelsreisenden TSP EUCLIDEAN-TSP
Theoretische Informatik 1 Approximierbarkeit David Kappel Institut für Grundlagen der Informationsverarbeitung Technische Universität Graz 10.06.2016 Übersicht Das Problem des Handelsreisenden TSP EUCLIDEAN-TSP
Fallzahlplanung bei unabhängigen Stichproben
 Fallzahlplanung bei unabhängigen Stichproben Seminar Aktuelle biometrische Probleme Benjamin Hofner benjamin.hofner@stat.uni-muenchen.de 12. Januar 2005 Übersicht 1. Einführung und Grundlagen der Fallzahlplanung
Fallzahlplanung bei unabhängigen Stichproben Seminar Aktuelle biometrische Probleme Benjamin Hofner benjamin.hofner@stat.uni-muenchen.de 12. Januar 2005 Übersicht 1. Einführung und Grundlagen der Fallzahlplanung
Algorithmen zum Lösen von Vertex und Set Cover Instanzen zur Planung von Angriffen auf Netzwerke
 Algorithmen zum Lösen von Vertex und Set Cover Instanzen zur Planung von Angriffen auf Netzwerke Steve Göring 13.07.2012 1/18 Gliederung Einleitung Grundlagen Vertex-Cover-Problem Set-Cover-Problem Lösungsalgorithmen
Algorithmen zum Lösen von Vertex und Set Cover Instanzen zur Planung von Angriffen auf Netzwerke Steve Göring 13.07.2012 1/18 Gliederung Einleitung Grundlagen Vertex-Cover-Problem Set-Cover-Problem Lösungsalgorithmen
Adaptive Systeme. Prof. Dr.-Ing. Heinz-Georg Fehn Prof. Dr. rer. nat. Nikolaus Wulff
 Adaptive Systeme Evolutionäre Algorithmen: Überlebenskampf und Evolutionäre Strategien Prof. Dr.-Ing. Heinz-Georg Fehn Prof. Dr. rer. nat. Nikolaus Wulff Überblick Einleitung Adaptive Filter Künstliche
Adaptive Systeme Evolutionäre Algorithmen: Überlebenskampf und Evolutionäre Strategien Prof. Dr.-Ing. Heinz-Georg Fehn Prof. Dr. rer. nat. Nikolaus Wulff Überblick Einleitung Adaptive Filter Künstliche
11. GRAPHEN 3 FLÜSSE UND SPANNBÄUME
 Algorithmen und Datenstrukturen 11. GRAPHEN 3 FLÜSSE UND SPANNBÄUME Algorithmen und Datenstrukturen - Ma5hias Thimm (thimm@uni-koblenz.de) 1 Algorithmen und Datenstrukturen 11.1. BERECHNUNG MAXIMALER FLÜSSE
Algorithmen und Datenstrukturen 11. GRAPHEN 3 FLÜSSE UND SPANNBÄUME Algorithmen und Datenstrukturen - Ma5hias Thimm (thimm@uni-koblenz.de) 1 Algorithmen und Datenstrukturen 11.1. BERECHNUNG MAXIMALER FLÜSSE
Softwareprojektpraktikum Maschinelle Übersetzung
 Softwareprojektpraktikum Maschinelle Übersetzung Jan-Thorsten Peter, Andreas Guta, Jan Rosendahl max.bleu@i6.informatik.rwth-aachen.de Vorbesprechung 5. Aufgabe 22. Juni 2017 Human Language Technology
Softwareprojektpraktikum Maschinelle Übersetzung Jan-Thorsten Peter, Andreas Guta, Jan Rosendahl max.bleu@i6.informatik.rwth-aachen.de Vorbesprechung 5. Aufgabe 22. Juni 2017 Human Language Technology
Wie findet man den optimalen Weg zum Ziel? Klassische Probleme der Kombinatorischen Optimierung
 Wie findet man den optimalen Weg zum Ziel? Klassische Probleme der Kombinatorischen Optimierung Teilnehmer/innen: Markus Dahinten, Graf Münster Gymnasium Bayreuth Robert Fay, Herder Gymnasium Berlin Falko
Wie findet man den optimalen Weg zum Ziel? Klassische Probleme der Kombinatorischen Optimierung Teilnehmer/innen: Markus Dahinten, Graf Münster Gymnasium Bayreuth Robert Fay, Herder Gymnasium Berlin Falko