Diskrete Fourier-Transformation Stefanie Dourvos Institut für Informatik FU Berlin
|
|
|
- Christian Schumacher
- vor 6 Jahren
- Abrufe
Transkript
1 Diskrete Fourier-Transformation Stefanie Dourvos Institut für Informatik FU Berlin
2 Übersicht Einleitung Problem: polynomiale Multiplikation Crashkurs Diskrete Fourier-Transformation DFT mit FFT DFT -1 Iterativer FFT-Algorithmus (effizienter) Paralleler FFT-Schaltkreis DFT in der Bearbeitung von Signalen Anmerkungen Quellen Seminar über Algorithmen - Diskrete Fourier-Transformation 2

3 Was macht die Fourier-Transformation Und was macht die DFT? [1] Seminar über Algorithmen - Diskrete Fourier-Transformation 3
4 Wozu braucht man die DFT? Digitale Signalverarbeitungsalgorithmen: Korrelation von Signalen Spektrum eines Nachrichtensignals Polynomiale Multiplikation Rauschunterdrückung Seminar über Algorithmen - Diskrete Fourier-Transformation 4


5 Rauschunterdrückung [6] Seminar über Algorithmen - Diskrete Fourier-Transformation 5


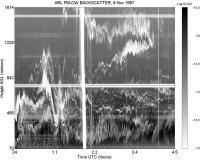

6 Problem: polynomiale Multiplikation FMCW Radar: Verfahren zur Störungsunterdrückung [3] [2] Seminar über Algorithmen - Diskrete Fourier-Transformation 6
7 Polynome Koeffizientendarstellung n 1 A x = j=0 a j x j Koeffizientenvektor a=(a 0, a 1,..., a n-1 ) Grad: n-1 Gradschranke: n Addition: C(x) = A(x) + B(x) mit c = a + b Aufwand Θ(n) Auswertung an der Stelle x 0 : (mit Horner-Schema) A(x 0 ) = a 0 + x 0 (a 1 + x 0 (a x 0 (a n-2 + x 0 (a n-1 ))...) Aufwand Θ(n) Seminar über Algorithmen - Diskrete Fourier-Transformation 7
8 Polynome Koeffizientendarstellung 2 Multiplikation: 2n 2 C x = j=0 j mit c j = k=0 c j x j a k b j k Aufwand: Θ(n²) resultierender Koeffizientenvektor c entspricht der Faltung: c = a b Seminar über Algorithmen - Diskrete Fourier-Transformation 8
9 Polynome Stützstellendarstellung {(x 0, y 0 ), (x 1, y 1 ),..., (x n-1, y n-1 )} Menge von n Stützstellenpaaren, so dass: alle x k verschieden y k = A(x k ) für alle k = 0, 1,..., n-1 Gradschranke: n Addition: C(x) = A(x) + B(x) mit A(x) : {(x 0, y 0 ), (x 1, y 1 ),..., (x n-1, y n-1 )} B(x) : {(x 0, y' 0 ), (x 1, y' 1 ),..., (x n-1, y' n-1 )} C(x) : {(x 0,y 0 +y' 0 ), (x 1,y 1 +y' 1 ),..., (x n-1,y n-1 +y' n-1 )} Aufwand Θ(n) Seminar über Algorithmen - Diskrete Fourier-Transformation 9
10 Polynome Stützstellendarstellung 2 Multiplikation: C(x) = A(x)B(x), wobei für jeden Punkt x k gilt: C(x k ) = A(x k )B(x k ) Aufwand: Θ(n) ACHTUNG! Gradschranke n, wo Gradschranke 2n-1 benötigt wird! Auswertung an einem neuen Punkt: ungeeignet Seminar über Algorithmen - Diskrete Fourier-Transformation 10
11 Umrechnung Koeffizientendarstellung -> Stützstellendarstellung simpel: (1) Auswahl von n verschiedenen Punkten (2) an diesen Punkten auswerten Aufwand: Θ(n²) für n Punkte Stützstellendarstellung -> Koeffizientendarstellung Interpolation: wohldefiniert für Interpolationspolynome mit n als Gradschranke Aufwand: Θ(n³) mit LU Zerlegung, Θ(n²) mit Lagrange-Formel Seminar über Algorithmen - Diskrete Fourier-Transformation 11
12 Umrechnung 2 Theorem: Für eine beliebige Menge {(x 0, y 0 ), (x 1, y 1 ),..., (x n-1, y n-1 )} von n Stützstellenpaaren mit paarweise verschiedenen x k gibt es ein eindeutiges Polynom A(x) der Gradschranke n, sodass für k = 0, 1,..., n-1 die Gleichung y k = A(x k ) gilt. Beweis: (Ansatz) 1 2 x0 x0 x 0 n x 1 x 1 x 1 a0 y0 a 1 y x n 1 x n 1 x n 1 a Vandermonde Matrix. :V x 0, x 1,, x n 1 n 1 = y n 1 det V = x k x j 0 j k n 1 => Matrix invertierbar, wenn die x k paarweise verschieden sind => a = V -1 y Seminar über Algorithmen - Diskrete Fourier-Transformation 12
13 Schneller geht es mit der DFT Mit Hilfe der DFT (und der FFT): Erzeugung der Stützstellendarstellung in Θ(n lg n) Mit Hilfe der inversen DFT (und der FFT): Interpolation in Θ(n lg n) komplexe Einheitswurzeln als Auswertungspunkte Seminar über Algorithmen - Diskrete Fourier-Transformation 13
14 DFT Seminar über Algorithmen - Diskrete Fourier-Transformation 14
15 Crashkurs: Einheitswurzeln Komplexe n-te Einheitswurzel: ω n = 1, w C Es gibt genau n komplexe n-te Einheitswurzeln: e 2πik/n, k = 0, 1,..., n-1 ω n = e 2πi/n primitive n-te Einheitswurzel Seminar über Algorithmen - Diskrete Fourier-Transformation 15
16 Eigenschaften der Einheitswurzeln Kürzungslemma: Für beliebige ganze Zahlen n 0, k 0 und d > 0 gilt: dk k dn = n Korollar: Für jede beliebige gerade ganze Zahl n > 0 gilt: n/ 2 n = 2 = 1 Halbierungslemma: Wenn n> 0 gradzahlig ist, dann sind die Quadrate der n komplexen n-ten Einheitswurzel die n/2 komplexen (n/2)-ten Einheitswurzeln. Seminar über Algorithmen - Diskrete Fourier-Transformation 16
17 Eigenschaften der Einheitswurzeln 2 Summationslemma Für jede beliebige ganze Zahl n 1 und jede von Null verschiedene ganze Zahl k, die nicht durch n teilbar ist, gilt: n 1 j=0 n k j =0. Seminar über Algorithmen - Diskrete Fourier-Transformation 17
18 Diskrete Fourier-Transformation Auswertung des Polynoms an den Stellen ω 0 n, ω 1 n-1 n,..., ω n entspricht der DFT n 1 n 1 y k = A k kj n = a j n = a j e 2 ijk / n j=0 j =0 Interpolation der inversen DFT n 1 a j = 1 n k=0 y k n k j Seminar über Algorithmen - Diskrete Fourier-Transformation 18
19 Diskrete Fourier-Transformation DFT als Matrixprodukt y = V n a y0 y 1 y 2 y n 1 1 n n n n n 1 1 n n n n n 1 1 n n n n y n 1 = 1 n 1 2 n 1 3 n 1 n 1 n 1 1 n n n n a0 a 1 a 2 a 3 a n 1 Inverse Operation: a = DFT n -1 (y) => y mit V n -1 multiplizieren Theorem: Für j, k = 0, 1,..., n-1 ist ω n -kj /n das Element (j,k) von V n -1. Seminar über Algorithmen - Diskrete Fourier-Transformation 19
20 Faltungstheorem Für zwei beliebige Vektoren a und b, deren Länge n eine Potenz von 2 ist, gilt: a b = DFT 2n -1 (DFT 2n (a) DFT 2n (b)), wobei die Vektoren a und b mit Nullen auf die Länge 2n aufgefüllt werden. Seminar über Algorithmen - Diskrete Fourier-Transformation 20
21 Vorgehen (1) Doppelte Gradschranke: Θ(n) A(x) und B(x) auf Gradschranke 2n bringen (2) Auswerten: Θ(n lg n) Stützstellendarstellung von A(x) und B(x) der Länge 2n durch zweimaliges Anwenden der FFT der Ordnung 2n (3) Punktweises Multiplizieren: Θ(n) C(x) = A(x)B(x) (4) Interpolieren: Θ(n lg n) Koeffizientendarstellung durch einmalige Anwendung der FFT, um die inverse DFT zu berechnen Seminar über Algorithmen - Diskrete Fourier-Transformation 21
22 DFT mit FFT Nutzung der Einheitswurzeln Divide-and-Conquer: Koeffizienten aufgeteilt in 2 neue Polynome Es gilt: wobei A(x) = A [0] (x²) + x*a [1] (x²), A [0] alle gradzahligen und A [1] alle ungradzahligen Seminar über Algorithmen - Diskrete Fourier-Transformation 22
23 FFT Algorithmus (rekursiv) Recursive-FFT(a) 1 n <- länge[a] 2 if n = 1 3 then return a 4 w n <- e 2πi/n 5 w n <- 1 6 a [0] <- (a 0, a 2,..., a n-2 ) 7 a [1] <- (a 1, a 3,..., a n-1 ) 8 y <- Recursive-FFT(a [1] ) 9 y <- Recursive-FFT(a [1] ) 10 for k <- 0 to n/ do y k [0] <- y k [1] + wy k 12 y k+(n/2) <- y k [0] - wy k [1] 13 w <- ww n 14 return y Seminar über Algorithmen - Diskrete Fourier-Transformation 23
24 Bearbeitung der Elemente a 0, a 1, a 2, a 3, a 4, a 5, a 6, a 7 a 0, a 2, a 4, a 6 a 1, a 3, a 5, a 7 a 0, a 4 a 2, a 6 a 1, a 5 a 3, a 7 a 0 a 4 a 2 a 6 a 1 a 5 a 3 a 7 Seminar über Algorithmen - Diskrete Fourier-Transformation 24
25 Laufzeit c*n a 0, a 1, a 2, a 3, a 4, a 5, a 6, a 7 c*n a 0, a 2, a 4, a 6 a 1, a 3, a 5, a 7 lg n c*n a 0, a 4 a 2, a 6 a 1, a 5 a 3, a 7 c*n a 0 a 4 a 2 a 6 a 1 a 5 a 3 a 7 Zusammen: cn lg(n) + cn -> Laufzeit: Θ(n lg n) Seminar über Algorithmen - Diskrete Fourier-Transformation 25
26 Inverse DFT mit FFT n 1 a j = 1 n k=0 y k n k j Modifikation des Algoritmus: (1) a und y tauschen Rollen (2) w n wird durch w -1 n ersetzt (3) jedes Element des Ergebnisses wird durch n geteilt Aufwand: Θ(n lg n) Seminar über Algorithmen - Diskrete Fourier-Transformation 26
27 Iterativer FFT-Algorithmus (effizienter) wy k [1] nicht zweimal berechnen, stattdessen in temporärer Variable t speichern Elemente des Ausgangsvektors a in die Reihenfolge wie in den Blättern bringen Elementpaare bilden, DFT jedes Paares mit Hilfe einer Überkreuz-Operation berechnen, Paar durch seine DFT ersetzen Seminar über Algorithmen - Diskrete Fourier-Transformation 27
28 Iterativer FFT-Algorithmus Iterative-FFT(a) 1 BIT-REVERSE-COPY(a, A) 2 n <- länge[a] 3 for s <- 1 to lg n 4 do m <- 2 s 5 w m <- e 2πi/m 6 for k <- 0 to n-1 step m 7 do w <- 1 8 for j <- 0 to m/2-1 9 do t <- wa[k+j+m/2] 10 u <- A[k+j] 11 A[k+j] <- u+t 12 A[k+j+m/2] <- u-t 13 w <- ww m 14 return A Seminar über Algorithmen - Diskrete Fourier-Transformation 28
29 Paralleler FFT-Schaltkreis [4] y k [0] w n k y k [1] y k [0] +w nk y k [1] y k [0] -w n k y k [1] Butterfly Operation Seminar über Algorithmen - Diskrete Fourier-Transformation 29
30 DFT in der Bearbeitung von Signalen [5] Wichtiges Hilfsmittel Leicht veränderte Formel Wichtige Eigenschaften: Linearität, Periodizität, zirkulare Verschiebung und Dualität Genutzt bei Faltung und Korrelation Seminar über Algorithmen - Diskrete Fourier-Transformation 30
31 Anwendungsbeispiele Bild- und Audioverarbeitung Digitale Modulationsverfahren Mustererkennung (z.b. Sprache) Kompressionsalgorithmen Radar-, Nachrichten- und Schalltechnik Seminar über Algorithmen - Diskrete Fourier-Transformation 31
32 Anmerkungen Unterschiede bei verschiedenen Autoren: Hin- und Rücktransformation ω n = e -2πi/n j statt i Seminar über Algorithmen - Diskrete Fourier-Transformation 32
33 Vielen Dank! Seminar über Algorithmen - Diskrete Fourier-Transformation 33
34 Quellen [1] [2] [3] [4] [5] Universität Koblenz-Landau, Institut für integrierte Naturwissenschaften, Seminar Digitale Signalverarbeitung [6] allgemein: Th. H. Cormen/C.E. Leiserson/R. Rivest/C. Stein: Algorithmen Eine Einführung, 2. Auflage, Oldenbourg Verlag München Wien Folienvorlage: Seminar über Algorithmen - Diskrete Fourier-Transformation 34
Diskrete und Schnelle Fourier Transformation. Patrick Arenz
 Diskrete und Schnelle Fourier Transformation Patrick Arenz 7. Januar 005 1 Diskrete Fourier Transformation Dieses Kapitel erläutert einige Merkmale der Diskreten Fourier Transformation DFT), der Schnellen
Diskrete und Schnelle Fourier Transformation Patrick Arenz 7. Januar 005 1 Diskrete Fourier Transformation Dieses Kapitel erläutert einige Merkmale der Diskreten Fourier Transformation DFT), der Schnellen
Numerische Methoden und Algorithmen in der Physik
 Numerische Methoden und Algorithmen in der Physik Hartmut Stadie, Christian Autermann 29.01.2009 Numerische Methoden und Algorithmen in der Physik Hartmut Stadie 1/ 18 Einführung Fourier-Transformation
Numerische Methoden und Algorithmen in der Physik Hartmut Stadie, Christian Autermann 29.01.2009 Numerische Methoden und Algorithmen in der Physik Hartmut Stadie 1/ 18 Einführung Fourier-Transformation
31 Polynomringe Motivation Definition: Polynomringe
 31 Polynomringe 31.1 Motivation Polynome spielen eine wichtige Rolle in vielen Berechnungen, einerseits weil oftmals funktionale Zusammenhänge durch Polynome beschrieben werden, andererseits weil Polynome
31 Polynomringe 31.1 Motivation Polynome spielen eine wichtige Rolle in vielen Berechnungen, einerseits weil oftmals funktionale Zusammenhänge durch Polynome beschrieben werden, andererseits weil Polynome
Übungen zu Einführung in die Lineare Algebra und Geometrie
 Übungen zu Einführung in die Lineare Algebra und Geometrie Andreas Cap Sommersemester 2010 Kapitel 1: Einleitung (1) Für a, b Z diskutiere analog zur Vorlesung das Lösungsverhalten der Gleichung ax = b
Übungen zu Einführung in die Lineare Algebra und Geometrie Andreas Cap Sommersemester 2010 Kapitel 1: Einleitung (1) Für a, b Z diskutiere analog zur Vorlesung das Lösungsverhalten der Gleichung ax = b
16. All Pairs Shortest Path (ASPS)
") . All Pairs Shortest Path (ASPS) All Pairs Shortest Path (APSP): Eingabe: Gewichteter Graph G=(V,E) Ausgabe: Für jedes Paar von Knoten u,v V die Distanz von u nach v sowie einen kürzesten Weg a b c d e
. All Pairs Shortest Path (ASPS) All Pairs Shortest Path (APSP): Eingabe: Gewichteter Graph G=(V,E) Ausgabe: Für jedes Paar von Knoten u,v V die Distanz von u nach v sowie einen kürzesten Weg a b c d e
Algebra und Diskrete Mathematik, PS3. Sommersemester Prüfungsfragen
 Algebra und Diskrete Mathematik, PS3 Sommersemester 2016 Prüfungsfragen Erläutern Sie die Sätze über die Division mit Rest für ganze Zahlen und für Polynome (mit Koeffizienten in einem Körper). Wodurch
Algebra und Diskrete Mathematik, PS3 Sommersemester 2016 Prüfungsfragen Erläutern Sie die Sätze über die Division mit Rest für ganze Zahlen und für Polynome (mit Koeffizienten in einem Körper). Wodurch
Effiziente Algorithmen und Datenstrukturen I. Kapitel 10: Lineare Algebra
 Effiziente Algorithmen und Datenstrukturen I Kapitel 10: Lineare Algebra Christian Scheideler WS 2008 19.02.2009 Kapitel 10 1 Überblick Notation Arithmetik auf großen Zahlen (Addition und Multiplikation)
Effiziente Algorithmen und Datenstrukturen I Kapitel 10: Lineare Algebra Christian Scheideler WS 2008 19.02.2009 Kapitel 10 1 Überblick Notation Arithmetik auf großen Zahlen (Addition und Multiplikation)
Division Für diesen Abschnitt setzen wir voraus, dass der Koeffizientenring ein Körper ist. Betrachte das Schema
 Division Für diesen Abschnitt setzen wir voraus, dass der Koeffizientenring ein Körper ist. Betrachte das Schema 2x 4 + x 3 + x + 3 div x 2 + x 1 = 2x 2 x + 3 (2x 4 + 2x 3 2x 2 ) x 3 + 2x 2 + x + 3 ( x
Division Für diesen Abschnitt setzen wir voraus, dass der Koeffizientenring ein Körper ist. Betrachte das Schema 2x 4 + x 3 + x + 3 div x 2 + x 1 = 2x 2 x + 3 (2x 4 + 2x 3 2x 2 ) x 3 + 2x 2 + x + 3 ( x
Numerische Integration und Differentiation
 Einführung Grundlagen Bemerkung (Numerische Mathematik) a) Im engeren Sinn: zahlenmäßige Auswertung mathematischer Zusammenhänge z B Lösung von linearen und nichtlinearen Gleichungssystemen Numerische
Einführung Grundlagen Bemerkung (Numerische Mathematik) a) Im engeren Sinn: zahlenmäßige Auswertung mathematischer Zusammenhänge z B Lösung von linearen und nichtlinearen Gleichungssystemen Numerische
Numerisches Programmieren, Übungen
 Technische Universität München SS 2012 Institut für Informatik Prof. Dr. Thomas Huckle Dipl.-Inf. Christoph Riesinger Dipl.-Math. Alexander Breuer Dipl.-Math. Dipl.-Inf. Jürgen Bräckle Dr.-Ing. Markus
Technische Universität München SS 2012 Institut für Informatik Prof. Dr. Thomas Huckle Dipl.-Inf. Christoph Riesinger Dipl.-Math. Alexander Breuer Dipl.-Math. Dipl.-Inf. Jürgen Bräckle Dr.-Ing. Markus
Partialbruchzerlegung für Biologen
 Partialbruchzerlegung für Biologen Rationale Funktionen sind Quotienten zweier Polynome, und sie tauchen auch in der Biologie auf. Die Partialbruchzerlegung bedeutet, einen einfacheren Ausdruck für eine
Partialbruchzerlegung für Biologen Rationale Funktionen sind Quotienten zweier Polynome, und sie tauchen auch in der Biologie auf. Die Partialbruchzerlegung bedeutet, einen einfacheren Ausdruck für eine
Teile und Herrsche Teil 2
 Teile und Herrsche Teil 2 binär Suchen und schnell Multiplizieren Markus Fleck Manuel Mauky Hochschule Zittau/Görlitz 19. April 2009 Suchen in langen Listen (0, 1, 2, 7, 8, 9, 9, 13, 13, 14, 14, 14, 16,
Teile und Herrsche Teil 2 binär Suchen und schnell Multiplizieren Markus Fleck Manuel Mauky Hochschule Zittau/Görlitz 19. April 2009 Suchen in langen Listen (0, 1, 2, 7, 8, 9, 9, 13, 13, 14, 14, 14, 16,
Vorlesung 12 22. bzw. 23. Januar 2014. Determinanten 1. Cramersche Regel
 Vorlesung 2 22 bzw 23 Januar 204 Lineares Gleichungssystem a a 2 b b 2 = F a a 2 a 3 b b 2 b 3 c c 2 c 3 = V V =< a, b c > c b a b a F V Seite 70 a x + a 2 x 2 + a 3 x 3 b = 0 < a x + a 2 x 2 + a 3 x 3
Vorlesung 2 22 bzw 23 Januar 204 Lineares Gleichungssystem a a 2 b b 2 = F a a 2 a 3 b b 2 b 3 c c 2 c 3 = V V =< a, b c > c b a b a F V Seite 70 a x + a 2 x 2 + a 3 x 3 b = 0 < a x + a 2 x 2 + a 3 x 3
Diskrete Strukturen. Abgabetermin: 20. September 2011, 14 Uhr in die DS Briefkästen
 Technische Universität München Fakultät für Informatik Lehrstuhl für Effiziente Algorithmen Prof. Dr. Ernst W. Mayr Dr. Werner Meixner Sommersemester 2011 Übungsblatt 5 12. September 2011 Diskrete Strukturen
Technische Universität München Fakultät für Informatik Lehrstuhl für Effiziente Algorithmen Prof. Dr. Ernst W. Mayr Dr. Werner Meixner Sommersemester 2011 Übungsblatt 5 12. September 2011 Diskrete Strukturen
9.2 Invertierbare Matrizen
 34 9.2 Invertierbare Matrizen Die Division ist als Umkehroperation der Multiplikation definiert. Das heisst, für reelle Zahlen a 0 und b gilt b = a genau dann, wenn a b =. Übertragen wir dies von den reellen
34 9.2 Invertierbare Matrizen Die Division ist als Umkehroperation der Multiplikation definiert. Das heisst, für reelle Zahlen a 0 und b gilt b = a genau dann, wenn a b =. Übertragen wir dies von den reellen
Stefan Ruzika. 24. April 2016
 Stefan Ruzika Mathematisches Institut Universität Koblenz-Landau Campus Koblenz 24. April 2016 Stefan Ruzika 2: Körper 24. April 2016 1 / 21 Gliederung 1 1 Schulstoff 2 Körper Definition eines Körpers
Stefan Ruzika Mathematisches Institut Universität Koblenz-Landau Campus Koblenz 24. April 2016 Stefan Ruzika 2: Körper 24. April 2016 1 / 21 Gliederung 1 1 Schulstoff 2 Körper Definition eines Körpers
Aufgabensammlung aus Mathematik 2 UMIT, SS 2010, Version vom 7. Mai 2010
 Aufgabensammlung aus Mathematik 2 UMIT, SS 2, Version vom 7. Mai 2 I Aufgabe I Teschl / K 3 Zerlegen Sie die Zahl 8 N in ihre Primfaktoren. Aufgabe II Teschl / K 3 Gegeben sind die natürliche Zahl 7 und
Aufgabensammlung aus Mathematik 2 UMIT, SS 2, Version vom 7. Mai 2 I Aufgabe I Teschl / K 3 Zerlegen Sie die Zahl 8 N in ihre Primfaktoren. Aufgabe II Teschl / K 3 Gegeben sind die natürliche Zahl 7 und
Fouriertransformation
 Fouriertransformation Radix2 fast fourier transform nach Cooley/Tukey 1 Inhaltsübersicht Mathematische Grundlagen: Komplexe Zahlen und Einheitswurzeln Die diskrete Fouriertransformation Der Radix2-Algorithmus
Fouriertransformation Radix2 fast fourier transform nach Cooley/Tukey 1 Inhaltsübersicht Mathematische Grundlagen: Komplexe Zahlen und Einheitswurzeln Die diskrete Fouriertransformation Der Radix2-Algorithmus
1 Größter gemeinsamer Teiler
 1 Größter gemeinsamer Teiler 1.1 Definition Eine Zahl x Z wird genau dann durch eine Zahl y geteilt, wenn gilt k Z : x = k y Die Schreibweise y x ist äquivalent dazu. Man spricht y teilt x, bzw. x wird
1 Größter gemeinsamer Teiler 1.1 Definition Eine Zahl x Z wird genau dann durch eine Zahl y geteilt, wenn gilt k Z : x = k y Die Schreibweise y x ist äquivalent dazu. Man spricht y teilt x, bzw. x wird
Lineare Differenzengleichungen und Polynome. Franz Pauer
 Lineare Differenzengleichungen und Polynome Franz Pauer Institut für Mathematik, Universität Innsbruck, Technikerstr. 13/7, A-600 Innsbruck, Österreich. Franz.Pauer@uibk.ac.at Vortrag beim ÖMG-LehrerInnenfortbildungstag
Lineare Differenzengleichungen und Polynome Franz Pauer Institut für Mathematik, Universität Innsbruck, Technikerstr. 13/7, A-600 Innsbruck, Österreich. Franz.Pauer@uibk.ac.at Vortrag beim ÖMG-LehrerInnenfortbildungstag
Diskrete Fourier-Transformation
 Universität Koblenz-Landau Institut für integrierte Naturwissenschaften Abteilung Physik Dozent: Dr. Merten Joost Seminar Digitale Signalverarbeitumg im Sommersemester 2005 Diskrete Fourier-Transformation
Universität Koblenz-Landau Institut für integrierte Naturwissenschaften Abteilung Physik Dozent: Dr. Merten Joost Seminar Digitale Signalverarbeitumg im Sommersemester 2005 Diskrete Fourier-Transformation
Differenzengleichungen. und Polynome
 Lineare Differenzengleichungen und Polynome Franz Pauer Institut für Mathematik, Universität Innsbruck Technikerstr. 13/7, A-600 Innsbruck, Österreich franz.pauer@uibk.ac.at 1 Einleitung Mit linearen Differenzengleichungen
Lineare Differenzengleichungen und Polynome Franz Pauer Institut für Mathematik, Universität Innsbruck Technikerstr. 13/7, A-600 Innsbruck, Österreich franz.pauer@uibk.ac.at 1 Einleitung Mit linearen Differenzengleichungen
Vorkurs: Mathematik für Informatiker
 Vorkurs: Mathematik für Informatiker Teil 3 Wintersemester 2016/17 Steven Köhler mathe@stevenkoehler.de mathe.stevenkoehler.de 2 c 2016 Steven Köhler Wintersemester 2016/17 Inhaltsverzeichnis Teil 1 Teil
Vorkurs: Mathematik für Informatiker Teil 3 Wintersemester 2016/17 Steven Köhler mathe@stevenkoehler.de mathe.stevenkoehler.de 2 c 2016 Steven Köhler Wintersemester 2016/17 Inhaltsverzeichnis Teil 1 Teil
Gleichungen und Ungleichungen
 Gleichung Eine Gleichung erhalten wir durch Gleichsetzen zweier Terme. Kapitel 3 Gleichungen und Ungleichungen linke Seite = rechte Seite Grundmenge: Menge aller Zahlen, die wir als Lösung der Gleichung
Gleichung Eine Gleichung erhalten wir durch Gleichsetzen zweier Terme. Kapitel 3 Gleichungen und Ungleichungen linke Seite = rechte Seite Grundmenge: Menge aller Zahlen, die wir als Lösung der Gleichung
Aufgaben des MSG-Zirkels 10b Schuljahr 2007/2008
 Aufgaben des MSG-Zirkels 10b Schuljahr 2007/2008 Alexander Bobenko und Ivan Izmestiev Technische Universität Berlin 1 Hausaufgaben vom 12.09.2007 Zahlentheorie 1 Aufgabe 1.1 Berechne die (quadratischen)
Aufgaben des MSG-Zirkels 10b Schuljahr 2007/2008 Alexander Bobenko und Ivan Izmestiev Technische Universität Berlin 1 Hausaufgaben vom 12.09.2007 Zahlentheorie 1 Aufgabe 1.1 Berechne die (quadratischen)
Lösung (die Geraden laufen parallel) oder unendlich viele Lösungen.
 oder unendlich viele Lösungen.") 1 Albert Ludwigs Universität Freiburg Abteilung Empirische Forschung und Ökonometrie Mathematik für Wirtschaftswissenschaftler Dr. Sevtap Kestel Winter 2008 Kapitel 16 Determinanten und inverse Matrizen
1 Albert Ludwigs Universität Freiburg Abteilung Empirische Forschung und Ökonometrie Mathematik für Wirtschaftswissenschaftler Dr. Sevtap Kestel Winter 2008 Kapitel 16 Determinanten und inverse Matrizen
Technische Universität München Zentrum Mathematik. Übungsblatt 7
 Technische Universität München Zentrum Mathematik Mathematik (Elektrotechnik) Prof. Dr. Anusch Taraz Dr. Michael Ritter Übungsblatt 7 Hausaufgaben Aufgabe 7. Für n N ist die Matrix-Exponentialfunktion
Technische Universität München Zentrum Mathematik Mathematik (Elektrotechnik) Prof. Dr. Anusch Taraz Dr. Michael Ritter Übungsblatt 7 Hausaufgaben Aufgabe 7. Für n N ist die Matrix-Exponentialfunktion
WS 2009/10. Diskrete Strukturen
 WS 2009/10 Diskrete Strukturen Prof. Dr. J. Esparza Lehrstuhl für Grundlagen der Softwarezuverlässigkeit und theoretische Informatik Fakultät für Informatik Technische Universität München http://www7.in.tum.de/um/courses/ds/ws0910
WS 2009/10 Diskrete Strukturen Prof. Dr. J. Esparza Lehrstuhl für Grundlagen der Softwarezuverlässigkeit und theoretische Informatik Fakultät für Informatik Technische Universität München http://www7.in.tum.de/um/courses/ds/ws0910
3.1.3 Newtonsche Interpolationsformel / Dividierte Differenzen
 KAPITEL 3 INTERPOLATION UND APPROXIMATION 4 33 Newtonsche Interpolationsformel / Dividierte Differenzen Das Verfahren von Neville ist unpraktisch, wenn man das Polynom selbst sucht oder das Polynom an
KAPITEL 3 INTERPOLATION UND APPROXIMATION 4 33 Newtonsche Interpolationsformel / Dividierte Differenzen Das Verfahren von Neville ist unpraktisch, wenn man das Polynom selbst sucht oder das Polynom an
Randomisierte Algorithmen 2. Erste Beispiele
 Randomisierte Algorithmen Randomisierte Algorithmen 2. Erste Beispiele Thomas Worsch Fakultät für Informatik Karlsruher Institut für Technologie Wintersemester 2016/2017 1 / 35 Randomisierter Identitätstest
Randomisierte Algorithmen Randomisierte Algorithmen 2. Erste Beispiele Thomas Worsch Fakultät für Informatik Karlsruher Institut für Technologie Wintersemester 2016/2017 1 / 35 Randomisierter Identitätstest
Mathematische Erfrischungen III - Vektoren und Matrizen
 Signalverarbeitung und Musikalische Akustik - MuWi UHH WS 06/07 Mathematische Erfrischungen III - Vektoren und Matrizen Universität Hamburg Vektoren entstanden aus dem Wunsch, u.a. Bewegungen, Verschiebungen
Signalverarbeitung und Musikalische Akustik - MuWi UHH WS 06/07 Mathematische Erfrischungen III - Vektoren und Matrizen Universität Hamburg Vektoren entstanden aus dem Wunsch, u.a. Bewegungen, Verschiebungen
2: Zahlentheorie / Restklassen 2.1: Modulare Arithmetik
 Stefan Lucks Diskrete Strukturen (WS 2009/10) 57 2: Zahlentheorie / Restklassen 2.1: Modulare Arithmetik Uhr: Stunden mod 24, Minuten mod 60, Sekunden mod 60,... Rechnerarithmetik: mod 2 w, w {8, 16, 32,
Stefan Lucks Diskrete Strukturen (WS 2009/10) 57 2: Zahlentheorie / Restklassen 2.1: Modulare Arithmetik Uhr: Stunden mod 24, Minuten mod 60, Sekunden mod 60,... Rechnerarithmetik: mod 2 w, w {8, 16, 32,
AES und Public-Key-Kryptographie
 Jens Kubieziel jens@kubieziel.de Friedrich-Schiller-Universität Jena Fakultät für Mathem atik und Informatik 22. Juni 2009 Beschreibung des Algorithmus Angriffe gegen AES Wichtige Algorithmen im 20. Jahrhundert
Jens Kubieziel jens@kubieziel.de Friedrich-Schiller-Universität Jena Fakultät für Mathem atik und Informatik 22. Juni 2009 Beschreibung des Algorithmus Angriffe gegen AES Wichtige Algorithmen im 20. Jahrhundert
2.1 Polynome, Polynomfunktionen und Nullstellen. k=0
 Kapitel 2 Polynome 2.1 Polynome, Polynomfunktionen und Nullstellen Der Polynomring R[x] Definition: Ein Polynom mit einer Variablen x über einem kommutativen Ring R ist ein formaler Ausdruck der Form p(x)
Kapitel 2 Polynome 2.1 Polynome, Polynomfunktionen und Nullstellen Der Polynomring R[x] Definition: Ein Polynom mit einer Variablen x über einem kommutativen Ring R ist ein formaler Ausdruck der Form p(x)
Bildverarbeitung: Fourier-Transformation. D. Schlesinger () BV: Fourier-Transformation 1 / 16
 BV: Fourier-Transformation 1 / 16") Bildverarbeitung: Fourier-Transformation D. Schlesinger () BV: Fourier-Transformation 1 / 16 Allgemeines Bilder sind keine Vektoren. Bilder sind Funktionen x : D C (Menge der Pixel in die Menge der Farbwerte).
Bildverarbeitung: Fourier-Transformation D. Schlesinger () BV: Fourier-Transformation 1 / 16 Allgemeines Bilder sind keine Vektoren. Bilder sind Funktionen x : D C (Menge der Pixel in die Menge der Farbwerte).
Lineare Gleichungssysteme
 Christian Serpé Universität Münster 14. September 2011 Christian Serpé (Universität Münster) 14. September 2011 1 / 56 Gliederung 1 Motivation Beispiele Allgemeines Vorgehen 2 Der Vektorraum R n 3 Lineare
Christian Serpé Universität Münster 14. September 2011 Christian Serpé (Universität Münster) 14. September 2011 1 / 56 Gliederung 1 Motivation Beispiele Allgemeines Vorgehen 2 Der Vektorraum R n 3 Lineare
1 Singulärwertzerlegung und Pseudoinverse
 Singulärwertzerlegung und Pseudoinverse Singulärwertzerlegung A sei eine Matrix mit n Spalten und m Zeilen. Zunächst sei n m. Bilde B = A A. Dies ist eine n n-matrix. Berechne die Eigenwerte von B. Diese
Singulärwertzerlegung und Pseudoinverse Singulärwertzerlegung A sei eine Matrix mit n Spalten und m Zeilen. Zunächst sei n m. Bilde B = A A. Dies ist eine n n-matrix. Berechne die Eigenwerte von B. Diese
4.1. Grundlegende Definitionen. Elemente der Analysis I Kapitel 4: Funktionen einer Variablen. 4.2 Graphen von Funktionen
 4.1. Grundlegende Definitionen Elemente der Analysis I Kapitel 4: Funktionen einer Variablen Prof. Dr. Volker Schulz Universität Trier / FB IV / Abt. Mathematik 22./29. November 2010 http://www.mathematik.uni-trier.de/
4.1. Grundlegende Definitionen Elemente der Analysis I Kapitel 4: Funktionen einer Variablen Prof. Dr. Volker Schulz Universität Trier / FB IV / Abt. Mathematik 22./29. November 2010 http://www.mathematik.uni-trier.de/
Copyright, Page 1 of 5 Die Determinante
 wwwmathematik-netzde Copyright, Page 1 of 5 Die Determinante Determinanten sind ein äußerst wichtiges Instrument zur Untersuchung von Matrizen und linearen Abbildungen Außerhalb der linearen Algebra ist
wwwmathematik-netzde Copyright, Page 1 of 5 Die Determinante Determinanten sind ein äußerst wichtiges Instrument zur Untersuchung von Matrizen und linearen Abbildungen Außerhalb der linearen Algebra ist
Algorithmen II Vorlesung am
 Algorithmen II Vorlesung am 0..0 Minimale Schnitte in Graphen INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg und Algorithmen nationales Forschungszentrum
Algorithmen II Vorlesung am 0..0 Minimale Schnitte in Graphen INSTITUT FÜR THEORETISCHE INFORMATIK PROF. DR. DOROTHEA WAGNER KIT Universität des Landes Baden-Württemberg und Algorithmen nationales Forschungszentrum
Oft kommt es darauf an, Potenzen a n mod m zu berechnen. Dabei kann n eine sehr groÿe Zahl sein.
 Oft kommt es darauf an, Potenzen a n mod m zu berechnen. Dabei kann n eine sehr groÿe Zahl sein. 3 1384788374932954500363985493554603584759389 mod 28374618732464817362847326847331872341234 Wieso kann ein
Oft kommt es darauf an, Potenzen a n mod m zu berechnen. Dabei kann n eine sehr groÿe Zahl sein. 3 1384788374932954500363985493554603584759389 mod 28374618732464817362847326847331872341234 Wieso kann ein
Spezialfall: Die Gleichung ax = b mit einer Unbekannten x kann mit Hilfe des Kehrwerts 1 a = a 1 gelöst werden:
 Inverse Matritzen Spezialfall: Die Gleichung ax b mit einer Unbekannten x kann mit Hilfe des Kehrwerts 1 a a 1 gelöst werden: ax b x b a a 1 b. Verallgemeinerung auf Ax b mit einer n nmatrix A: Wenn es
Inverse Matritzen Spezialfall: Die Gleichung ax b mit einer Unbekannten x kann mit Hilfe des Kehrwerts 1 a a 1 gelöst werden: ax b x b a a 1 b. Verallgemeinerung auf Ax b mit einer n nmatrix A: Wenn es
Quadratische Matrizen
 Quadratische Matrizen (n n)-matrizen heißen quadratische Die entsprechenden linearen Abbildungen sind laut Definition Endomorphismen des R n (weil f A : R n R n ) Das Produkt von (n n)- Matrizen ist auch
Quadratische Matrizen (n n)-matrizen heißen quadratische Die entsprechenden linearen Abbildungen sind laut Definition Endomorphismen des R n (weil f A : R n R n ) Das Produkt von (n n)- Matrizen ist auch
Public-Key-Algorithmen WS2015/2016
 Public-Key-Algorithmen WS2015/2016 Lernkontrollfragen Michael Braun Was bedeuten die kryptographischen Schutzziele Vertraulichkeit, Integrität, Nachrichtenauthentizität, Teilnehmerauthentizität, Verbindlichkeit?
Public-Key-Algorithmen WS2015/2016 Lernkontrollfragen Michael Braun Was bedeuten die kryptographischen Schutzziele Vertraulichkeit, Integrität, Nachrichtenauthentizität, Teilnehmerauthentizität, Verbindlichkeit?
Effiziente Algorithmen
 Effiziente Algorithmen Vorüberlegungen und Divide-and-Conquer-Algorithmen Vorlesender: Martin Aumüller (nach Folien von Prof. Martin Dietzfelbinger) April 2012 FG KTuEA, TU Ilmenau Effiziente Algorithmen
Effiziente Algorithmen Vorüberlegungen und Divide-and-Conquer-Algorithmen Vorlesender: Martin Aumüller (nach Folien von Prof. Martin Dietzfelbinger) April 2012 FG KTuEA, TU Ilmenau Effiziente Algorithmen
Entscheidungsbäume. Definition Entscheidungsbaum. Frage: Gibt es einen Sortieralgorithmus mit o(n log n) Vergleichen?
 Vergleichen?") Entscheidungsbäume Frage: Gibt es einen Sortieralgorithmus mit o(n log n) Vergleichen? Definition Entscheidungsbaum Sei T ein Binärbaum und A = {a 1,..., a n } eine zu sortierenden Menge. T ist ein Entscheidungsbaum
Entscheidungsbäume Frage: Gibt es einen Sortieralgorithmus mit o(n log n) Vergleichen? Definition Entscheidungsbaum Sei T ein Binärbaum und A = {a 1,..., a n } eine zu sortierenden Menge. T ist ein Entscheidungsbaum
Abschnitt: Algorithmendesign und Laufzeitanalyse
 Abschnitt: Algorithmendesign und Laufzeitanalyse Definition Divide-and-Conquer Paradigma Divide-and-Conquer Algorithmen verwenden die Strategien 1 Divide: Teile das Problem rekursiv in Subproblem gleicher
Abschnitt: Algorithmendesign und Laufzeitanalyse Definition Divide-and-Conquer Paradigma Divide-and-Conquer Algorithmen verwenden die Strategien 1 Divide: Teile das Problem rekursiv in Subproblem gleicher
Einführung in die Zahlentheorie
 Einführung in die Zahlentheorie Jörn Steuding Uni Wü, SoSe 2015 I Zahlen II Modulare Arithmetik III Quadratische Reste IV Diophantische Gleichungen V Quadratische Formen Wir behandeln die wesentliche Zahlentheorie
Einführung in die Zahlentheorie Jörn Steuding Uni Wü, SoSe 2015 I Zahlen II Modulare Arithmetik III Quadratische Reste IV Diophantische Gleichungen V Quadratische Formen Wir behandeln die wesentliche Zahlentheorie
1 Potenzen und Polynome
 1 Potenzen und Polynome Für eine reelle Zahl x R und eine natürliche Zahl n N definieren wir x n := x x x... x }{{} n-mal Einschub über die bisher aufgetretenen mathematischen Symbole: Definition mittels
1 Potenzen und Polynome Für eine reelle Zahl x R und eine natürliche Zahl n N definieren wir x n := x x x... x }{{} n-mal Einschub über die bisher aufgetretenen mathematischen Symbole: Definition mittels
5.1 Determinanten der Ordnung 2 und 3. a 11 a 12 a 21 a 22. det(a) =a 11 a 22 a 12 a 21. a 11 a 21
 =a 11 a 22 a 12 a 21. a 11 a 21") 5. Determinanten 5.1 Determinanten der Ordnung 2 und 3 Als Determinante der zweireihigen Matrix A = a 11 a 12 bezeichnet man die Zahl =a 11 a 22 a 12 a 21. Man verwendet auch die Bezeichnung = A = a 11
5. Determinanten 5.1 Determinanten der Ordnung 2 und 3 Als Determinante der zweireihigen Matrix A = a 11 a 12 bezeichnet man die Zahl =a 11 a 22 a 12 a 21. Man verwendet auch die Bezeichnung = A = a 11
15ab 21bc 9b = 3b 5a 7c 3
 4 4.1 Einführung Haben alle Summanden einer algebraischen Summe einen gemeinsamen Faktor, so kann man diesen gemeinsamen Faktor ausklammern. Die Summe wird dadurch in ein Produkt umgewandelt. Tipp: Kontrolle
4 4.1 Einführung Haben alle Summanden einer algebraischen Summe einen gemeinsamen Faktor, so kann man diesen gemeinsamen Faktor ausklammern. Die Summe wird dadurch in ein Produkt umgewandelt. Tipp: Kontrolle
Seminar Digitale Signalverarbeitung
 Universität Koblenz-Landau Institut für integrierte aturwissenschaften Abteilung Physik Dr. Merten Joost Seminar Digitale Signalverarbeitung Thema: Fast Fourier Transformation Praktische Durchführung einer
Universität Koblenz-Landau Institut für integrierte aturwissenschaften Abteilung Physik Dr. Merten Joost Seminar Digitale Signalverarbeitung Thema: Fast Fourier Transformation Praktische Durchführung einer
Elemente der Analysis I Kapitel 2: Einführung II, Gleichungen
 Elemente der Analysis I Kapitel 2: Einführung II, Gleichungen Prof. Dr. Volker Schulz Universität Trier / FB IV / Abt. Mathematik 8. November 2010 http://www.mathematik.uni-trier.de/ schulz/elan-ws1011.html
Elemente der Analysis I Kapitel 2: Einführung II, Gleichungen Prof. Dr. Volker Schulz Universität Trier / FB IV / Abt. Mathematik 8. November 2010 http://www.mathematik.uni-trier.de/ schulz/elan-ws1011.html
2. Spezielle anwendungsrelevante Funktionen
 2. Spezielle anwendungsrelevante Funktionen (1) Affin-lineare Funktionen Eine Funktion f : R R heißt konstant, wenn ein c R mit f (x) = c für alle x R existiert linear, wenn es ein a R mit f (x) = ax für
2. Spezielle anwendungsrelevante Funktionen (1) Affin-lineare Funktionen Eine Funktion f : R R heißt konstant, wenn ein c R mit f (x) = c für alle x R existiert linear, wenn es ein a R mit f (x) = ax für
Matrizen, Determinanten, lineare Gleichungssysteme
 Matrizen, Determinanten, lineare Gleichungssysteme 1 Matrizen Definition 1. Eine Matrix A vom Typ m n (oder eine m n Matrix, A R m n oder A C m n ) ist ein rechteckiges Zahlenschema mit m Zeilen und n
Matrizen, Determinanten, lineare Gleichungssysteme 1 Matrizen Definition 1. Eine Matrix A vom Typ m n (oder eine m n Matrix, A R m n oder A C m n ) ist ein rechteckiges Zahlenschema mit m Zeilen und n
4 Vorlesung: 21.11. 2005 Matrix und Determinante
 4 Vorlesung: 2111 2005 Matrix und Determinante 41 Matrix und Determinante Zur Lösung von m Gleichungen mit n Unbekannten kann man alle Parameter der Gleichungen in einem rechteckigen Zahlenschema, einer
4 Vorlesung: 2111 2005 Matrix und Determinante 41 Matrix und Determinante Zur Lösung von m Gleichungen mit n Unbekannten kann man alle Parameter der Gleichungen in einem rechteckigen Zahlenschema, einer
Kap. 8: Speziell gewählte Kurven
 Stefan Lucks 8: Spezielle Kurven 82 Verschl. mit Elliptischen Kurven Kap. 8: Speziell gewählte Kurven Zur Erinnerung: Für beliebige El. Kurven kann man den Algorithmus von Schoof benutzen, um die Anzahl
Stefan Lucks 8: Spezielle Kurven 82 Verschl. mit Elliptischen Kurven Kap. 8: Speziell gewählte Kurven Zur Erinnerung: Für beliebige El. Kurven kann man den Algorithmus von Schoof benutzen, um die Anzahl
In diesem Abschnitt betrachten wir nur quadratische Matrizen mit Komponenten aus einem Körper K, also A K n n für ein n N. Wenn (mit einem n > 1)
") 34 Determinanten In diesem Abschnitt betrachten wir nur quadratische Matrizen mit Komponenten aus einem Körper K, also A K n n für ein n N Wenn (mit einem n > 1) a 11 a 12 a 1n a 21 a 22 a 2n A =, (1)
34 Determinanten In diesem Abschnitt betrachten wir nur quadratische Matrizen mit Komponenten aus einem Körper K, also A K n n für ein n N Wenn (mit einem n > 1) a 11 a 12 a 1n a 21 a 22 a 2n A =, (1)
Mathematik II für Studierende der Informatik. Wirtschaftsinformatik (Analysis und lineare Algebra) im Sommersemester 2016
 im Sommersemester 2016") und Wirtschaftsinformatik (Analysis und lineare Algebra) im Sommersemester 2016 25. April 2016 Die Dimensionsformel Definition 3.9 Sei f : V W eine lineare Abbildung zwischen zwei K-Vektorräumen. Der Kern
und Wirtschaftsinformatik (Analysis und lineare Algebra) im Sommersemester 2016 25. April 2016 Die Dimensionsformel Definition 3.9 Sei f : V W eine lineare Abbildung zwischen zwei K-Vektorräumen. Der Kern
Inverse Matrix. 1-E Ma 1 Lubov Vassilevskaya
 Inverse Matrix -E Ma Lubov Vassilevskaya Inverse Matrix Eine n-reihige, quadratische Matrix heißt regulär, wenn ihre Determinante einen von Null verschiedenen Wert besitzt. Anderenfalls heißt sie singulär.
Inverse Matrix -E Ma Lubov Vassilevskaya Inverse Matrix Eine n-reihige, quadratische Matrix heißt regulär, wenn ihre Determinante einen von Null verschiedenen Wert besitzt. Anderenfalls heißt sie singulär.
Student: Alexander Carls Matrikelnummer: Aufgabe: Beschreibung des euklidischen Algorithmus Datum:
 Berufsakademie Stuttgart / Außenstelle Horb Studienbereich Technik Studiengang Informationstechnik Kurs IT2006, 2.Semester Dozent: Olaf Herden Student: Alexander Carls Matrikelnummer: 166270 Aufgabe: Beschreibung
Berufsakademie Stuttgart / Außenstelle Horb Studienbereich Technik Studiengang Informationstechnik Kurs IT2006, 2.Semester Dozent: Olaf Herden Student: Alexander Carls Matrikelnummer: 166270 Aufgabe: Beschreibung
Primzahlen. Herbert Koch Mathematisches Institut Universität Bonn Die Primfaktorzerlegung. a = st
 Primzahlen Herbert Koch Mathematisches Institut Universität Bonn 12.08.2010 1 Die Primfaktorzerlegung Wir kennen die natürlichen Zahlen N = 1, 2,..., die ganzen Zahlen Z, die rationalen Zahlen (Brüche
Primzahlen Herbert Koch Mathematisches Institut Universität Bonn 12.08.2010 1 Die Primfaktorzerlegung Wir kennen die natürlichen Zahlen N = 1, 2,..., die ganzen Zahlen Z, die rationalen Zahlen (Brüche
Beispiele zur schnellen Fouriertransformation
 Beispiele zur schnellen Fouriertransformation Man bestimme die Koeefizienten der diskreten Fourieranalyse der Funktion f(t) = sin(3t) + cos(5t) an den Stützstellen t k = π n k, k = 0,,,n, n = p! Es sind
Beispiele zur schnellen Fouriertransformation Man bestimme die Koeefizienten der diskreten Fourieranalyse der Funktion f(t) = sin(3t) + cos(5t) an den Stützstellen t k = π n k, k = 0,,,n, n = p! Es sind
Diskrete Strukturen. Restklassenringe WS 2013/2014. Vorlesung vom 24. Jänner 2014
 Diskrete Strukturen WS 2013/2014 Vorlesung vom 24. Jänner 2014 Thomas Vetterlein Institut für Wissensbasierte Mathematische Systeme Johannes-Kepler-Universität Linz 10.1 Die Modulo-n-Relation Definition
Diskrete Strukturen WS 2013/2014 Vorlesung vom 24. Jänner 2014 Thomas Vetterlein Institut für Wissensbasierte Mathematische Systeme Johannes-Kepler-Universität Linz 10.1 Die Modulo-n-Relation Definition
Lösungsvorschlag für die Probeklausuren und Klausuren zu Algebra für Informations- und Kommunikationstechniker bei Prof. Dr.
 Lösungsvorschlag für die Probeklausuren und Klausuren zu Algebra für Informations- und Kommunikationstechniker bei Prof. Dr. Kurzweil Florian Franzmann André Diehl Kompiliert am 10. April 2006 um 18:33
Lösungsvorschlag für die Probeklausuren und Klausuren zu Algebra für Informations- und Kommunikationstechniker bei Prof. Dr. Kurzweil Florian Franzmann André Diehl Kompiliert am 10. April 2006 um 18:33
Erweiterte Koordinaten
 Erweiterte Koordinaten Sei K n ein n dimensionaler affiner Raum Die erweiterten Koordinaten des Punktes x x n K n sind x x n Kn+ (Das ist für alle K sinnvoll, weil in jedem Körper K wohldefiniert ist In
Erweiterte Koordinaten Sei K n ein n dimensionaler affiner Raum Die erweiterten Koordinaten des Punktes x x n K n sind x x n Kn+ (Das ist für alle K sinnvoll, weil in jedem Körper K wohldefiniert ist In
Kapitel 8. Rekursionsgleichungen. Landau-Symbole. Lösen von Rekursionsgleichungen Allgemeines Iterationsmethode Spezialfälle Erzeugende Funktionen
 Rekursionsgleichungen Landau-Symbole Kapitel 8 Lösen von Rekursionsgleichungen Allgemeines Iterationsmethode Spezialfälle Erzeugende Funktionen Kapitel 8 Rekursionsgleichungen p./42 Landau-Symbole () Modellierung
Rekursionsgleichungen Landau-Symbole Kapitel 8 Lösen von Rekursionsgleichungen Allgemeines Iterationsmethode Spezialfälle Erzeugende Funktionen Kapitel 8 Rekursionsgleichungen p./42 Landau-Symbole () Modellierung
Computergraphik 1 2. Teil: Bildverarbeitung. Fouriertransformation Ende FFT, Bildrestauration mit PSF Transformation, Interpolation
 Computergraphik 1 2. Teil: Bildverarbeitung Fouriertransformation Ende FFT, Bildrestauration mit PSF Transformation, Interpolation LMU München Medieninformatik Butz/Hoppe Computergrafik 1 SS2009 1 2 Repräsentation
Computergraphik 1 2. Teil: Bildverarbeitung Fouriertransformation Ende FFT, Bildrestauration mit PSF Transformation, Interpolation LMU München Medieninformatik Butz/Hoppe Computergrafik 1 SS2009 1 2 Repräsentation
Am Dienstag, den 16. Dezember, ist Eulenfest. 1/48
 Am Dienstag, den 16. Dezember, ist Eulenfest. 1/48 Grundbegriffe der Informatik Einheit 12: Erste Algorithmen in Graphen Thomas Worsch Universität Karlsruhe, Fakultät für Informatik Wintersemester 2008/2009
Am Dienstag, den 16. Dezember, ist Eulenfest. 1/48 Grundbegriffe der Informatik Einheit 12: Erste Algorithmen in Graphen Thomas Worsch Universität Karlsruhe, Fakultät für Informatik Wintersemester 2008/2009
Lineares Programmieren
 Vorlesung Algorithmische Geometrie LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 03.05.2011 Nachtrag Art Gallery Problem Lässt sich der Triangulierungs-Algorithmus
Vorlesung Algorithmische Geometrie LEHRSTUHL FÜR ALGORITHMIK I INSTITUT FÜR THEORETISCHE INFORMATIK FAKULTÄT FÜR INFORMATIK Martin Nöllenburg 03.05.2011 Nachtrag Art Gallery Problem Lässt sich der Triangulierungs-Algorithmus
Aussagenlogik. Lehrstuhl für BWL, insb. Mathematik und Statistik Prof. Dr. Michael Merz Mathematik für Betriebswirte I Wintersemester 2015/2016
 Aussagenlogik 1. Gegeben seien folgende Aussagen: A: 7 ist eine ungerade Zahl B: a + b < a + b, a, b R C: 2 ist eine Primzahl D: 7 7 E: a + 1 b, a, b R F: 3 ist Teiler von 9 Bestimmen Sie den Wahrheitswert
Aussagenlogik 1. Gegeben seien folgende Aussagen: A: 7 ist eine ungerade Zahl B: a + b < a + b, a, b R C: 2 ist eine Primzahl D: 7 7 E: a + 1 b, a, b R F: 3 ist Teiler von 9 Bestimmen Sie den Wahrheitswert
1 Das RSA-Verfahren und seine algorithmischen Grundlagen
 1 Das RSA-Verfahren und seine algorithmischen Grundlagen Das wichtigste d. h., am weitesten verbreitete und am meisten analysierte asymmetrische Verfahren ist das RSA-Verfahren, benannt nach seinen Erfindern
1 Das RSA-Verfahren und seine algorithmischen Grundlagen Das wichtigste d. h., am weitesten verbreitete und am meisten analysierte asymmetrische Verfahren ist das RSA-Verfahren, benannt nach seinen Erfindern
Mathematik II/2 Numerik
 Mathematik II/2 Numerik Oliver Ernst Professur Numerische Mathematik Sommersemester 2013 Inhalt 1 Einleitung 2 Computer-Arithmetik und Fehleranalyse 2.1 Ein Beispiel 2.2 Gleitpunktzahlen 2.3 Rundung 2.4
Mathematik II/2 Numerik Oliver Ernst Professur Numerische Mathematik Sommersemester 2013 Inhalt 1 Einleitung 2 Computer-Arithmetik und Fehleranalyse 2.1 Ein Beispiel 2.2 Gleitpunktzahlen 2.3 Rundung 2.4
Diagonalisieren. Nikolai Nowaczyk Lars Wallenborn
 Diagonalisieren Nikolai Nowaczyk http://mathniknode/ Lars Wallenborn http://wwwwallenbornnet/ 16-18 März 01 Inhaltsverzeichnis 1 Matrizen 1 11 Einschub: Invertierbarkeit
Diagonalisieren Nikolai Nowaczyk http://mathniknode/ Lars Wallenborn http://wwwwallenbornnet/ 16-18 März 01 Inhaltsverzeichnis 1 Matrizen 1 11 Einschub: Invertierbarkeit
Elemente der Mathematik - Sommer 2016
 Elemente der Mathematik - Sommer 016 Prof. Dr. Matthias Lesch, Regula Krapf Lösungen Übungsblatt Aufgabe 5 (4 Punkte). Für n 1 sei ζ n = e πi n. Die n-ten Einheitswurzeln sind gegeben als ζn k = e kπi
Elemente der Mathematik - Sommer 016 Prof. Dr. Matthias Lesch, Regula Krapf Lösungen Übungsblatt Aufgabe 5 (4 Punkte). Für n 1 sei ζ n = e πi n. Die n-ten Einheitswurzeln sind gegeben als ζn k = e kπi
Endliche Körper Seminar: Diskrete Mathematik Leitung: Prof. Dr. Rainer Lang Von: Steffen Lohrke (ii5105) SS2005
 SS2005") Endliche Körper Seminar: Diskrete Mathematik Leitung: Prof. Dr. Rainer Lang Von: Steffen Lohrke (ii5105) SS2005 Inhaltsverzeichnis Abelsche Gruppe 3 Kommutativer Ring 5 Körper 6 Endliche Körper 7 Endliche
Endliche Körper Seminar: Diskrete Mathematik Leitung: Prof. Dr. Rainer Lang Von: Steffen Lohrke (ii5105) SS2005 Inhaltsverzeichnis Abelsche Gruppe 3 Kommutativer Ring 5 Körper 6 Endliche Körper 7 Endliche
Lineare Algebra - alles was man wissen muß
 Statistik für Bioinformatiker SoSe 3 Rainer Spang Lineare Algebra - alles was man wissen muß Der Titel ist natürlich gelogen, aber was wir hier zusammengetragen haben ist zumindest ein Anfang. Weniger
Statistik für Bioinformatiker SoSe 3 Rainer Spang Lineare Algebra - alles was man wissen muß Der Titel ist natürlich gelogen, aber was wir hier zusammengetragen haben ist zumindest ein Anfang. Weniger
Grundlagen der Computer-Tomographie
 Grundlagen der Computer-Tomographie Quellenangabe Die folgenden Folien sind zum Teil dem Übersichtsvortrag: imbie.meb.uni-bonn.de/epileptologie/staff/lehnertz/ct1.pdf entnommen. Als Quelle für die mathematischen
Grundlagen der Computer-Tomographie Quellenangabe Die folgenden Folien sind zum Teil dem Übersichtsvortrag: imbie.meb.uni-bonn.de/epileptologie/staff/lehnertz/ct1.pdf entnommen. Als Quelle für die mathematischen
Theoretische Informatik SS 03 Übung 4
 Fakten aus Übung 3 Theoretische Informatik SS 03 Übung 4 In Übung 3 wurden einigen Fakten bewiesen, die für diese Übung benötigt werden. Folgende Konstrukte können mit LOOP-Programmen simuliert werden:
Fakten aus Übung 3 Theoretische Informatik SS 03 Übung 4 In Übung 3 wurden einigen Fakten bewiesen, die für diese Übung benötigt werden. Folgende Konstrukte können mit LOOP-Programmen simuliert werden:
2.9 Die komplexen Zahlen
 LinAlg II Version 1 3. April 2006 c Rudolf Scharlau 121 2.9 Die komplexen Zahlen Die komplexen Zahlen sind unverzichtbar für nahezu jede Art von höherer Mathematik. Systematisch gehören sie zum einen in
LinAlg II Version 1 3. April 2006 c Rudolf Scharlau 121 2.9 Die komplexen Zahlen Die komplexen Zahlen sind unverzichtbar für nahezu jede Art von höherer Mathematik. Systematisch gehören sie zum einen in
Diskrete Mathematik. Sebastian Iwanowski FH Wedel. Kap. 4: Zahlentheorie
 Prof. Dr. Sebastian Iwanowski DM4 Folie 1 Referenzen zum Nacharbeiten: Diskrete Mathematik Sebastian Iwanowski FH Wedel Kap. 4: Zahlentheorie Beutelspacher 5 Lang 7, Biggs 20, 22, 23 (jeweils teilweise,
Prof. Dr. Sebastian Iwanowski DM4 Folie 1 Referenzen zum Nacharbeiten: Diskrete Mathematik Sebastian Iwanowski FH Wedel Kap. 4: Zahlentheorie Beutelspacher 5 Lang 7, Biggs 20, 22, 23 (jeweils teilweise,
Algorithmen und Datenstrukturen
 Algorithmen und Datenstrukturen Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Stefan Werner (Übungen) sowie viele Tutoren Teilnehmerkreis und Voraussetzungen Studiengänge
Algorithmen und Datenstrukturen Prof. Dr. Ralf Möller Universität zu Lübeck Institut für Informationssysteme Stefan Werner (Übungen) sowie viele Tutoren Teilnehmerkreis und Voraussetzungen Studiengänge
Polynominterpolation
 Polynominterpolation In der numerischen Mathematik versteht man unter Polynominterpolation die Suche nach einem Polynom, welches exakt durch vorgegebene Punkte (z. B. aus einer Messreihe) verläuft. Dieses
Polynominterpolation In der numerischen Mathematik versteht man unter Polynominterpolation die Suche nach einem Polynom, welches exakt durch vorgegebene Punkte (z. B. aus einer Messreihe) verläuft. Dieses
Diplom Mathematiker Wolfgang Kinzner. 17. Oktober Technische Universität München. Die abc-formel. W. Kinzner. Problemstellung.
 Diplom Mathematiker Wolfgang Kinzner Technische Universität München 17. Oktober 2013 1 / 9 Inhaltsverzeichnis 1 2 / 9 Inhaltsverzeichnis 1 2 2 / 9 Inhaltsverzeichnis 1 2 3 2 / 9 Inhaltsverzeichnis 1 2
Diplom Mathematiker Wolfgang Kinzner Technische Universität München 17. Oktober 2013 1 / 9 Inhaltsverzeichnis 1 2 / 9 Inhaltsverzeichnis 1 2 2 / 9 Inhaltsverzeichnis 1 2 3 2 / 9 Inhaltsverzeichnis 1 2
Addition, Subtraktion und Multiplikation von komplexen Zahlen z 1 = (a 1, b 1 ) und z 2 = (a 2, b 2 ):
 und z 2 = (a 2, b 2 ):") Komplexe Zahlen Definition 1. Eine komplexe Zahl z ist ein geordnetes Paar reeller Zahlen (a, b). Wir nennen a den Realteil von z und b den Imaginärteil von z, geschrieben a = Re z, b = Im z. Komplexe
Komplexe Zahlen Definition 1. Eine komplexe Zahl z ist ein geordnetes Paar reeller Zahlen (a, b). Wir nennen a den Realteil von z und b den Imaginärteil von z, geschrieben a = Re z, b = Im z. Komplexe
WURZEL Werkstatt Mathematik Polynome Grundlagen
 Die WURZEL Werkstatt Mathematik Polynome Grundlagen Wer lange genug über hunderten von Problemen gebrütet hat, kann bei vielen bereits erraten, aus welchem Land sie kommen. So lieben die Briten etwa die
Die WURZEL Werkstatt Mathematik Polynome Grundlagen Wer lange genug über hunderten von Problemen gebrütet hat, kann bei vielen bereits erraten, aus welchem Land sie kommen. So lieben die Briten etwa die
Praktikum Diskrete Optimierung (Teil 11) 17.07.2006 1
 17.07.2006 1") Praktikum Diskrete Optimierung (Teil 11) 17.07.2006 1 1 Primzahltest 1.1 Motivation Primzahlen spielen bei zahlreichen Algorithmen, die Methoden aus der Zahlen-Theorie verwenden, eine zentrale Rolle. Hierzu
Praktikum Diskrete Optimierung (Teil 11) 17.07.2006 1 1 Primzahltest 1.1 Motivation Primzahlen spielen bei zahlreichen Algorithmen, die Methoden aus der Zahlen-Theorie verwenden, eine zentrale Rolle. Hierzu
Karlsruher Institut für Technologie Institut für Algebra und Geometrie
 Karlsruher Institut für Technologie Institut für Algebra und Geometrie PD Dr. Stefan Kühnlein Dipl.-Math. Jochen Schröder Einführung in Algebra und Zahlentheorie Übungsblatt 10 1 Aufgabe 1 (4 Punkte) Sei
Karlsruher Institut für Technologie Institut für Algebra und Geometrie PD Dr. Stefan Kühnlein Dipl.-Math. Jochen Schröder Einführung in Algebra und Zahlentheorie Übungsblatt 10 1 Aufgabe 1 (4 Punkte) Sei
Achtung: Groß O definiert keine totale Ordnungsrelation auf der Menge aller Funktionen! Beweis: Es gibt positive Funktionen f und g so, dass
 Achtung: Groß O definiert keine totale Ordnungsrelation auf der Menge aller Funktionen! Beweis: Es gibt positive Funktionen f und g so, dass f O g und auch g O f. Wähle zum Beispiel und G. Zachmann Informatik
Achtung: Groß O definiert keine totale Ordnungsrelation auf der Menge aller Funktionen! Beweis: Es gibt positive Funktionen f und g so, dass f O g und auch g O f. Wähle zum Beispiel und G. Zachmann Informatik
Lineare Gleichungssysteme (Teschl/Teschl 11.1)
") Lineare Gleichungssysteme (Teschl/Teschl.) Ein Lineares Gleichungssystem (LGS) besteht aus m Gleichungen mit n Unbekannten x,...,x n und hat die Form a x + a 2 x 2 +... + a n x n b a 2 x + a 22 x 2 +...
Lineare Gleichungssysteme (Teschl/Teschl.) Ein Lineares Gleichungssystem (LGS) besteht aus m Gleichungen mit n Unbekannten x,...,x n und hat die Form a x + a 2 x 2 +... + a n x n b a 2 x + a 22 x 2 +...
Die (Un-)Sicherheit von DES
Sicherheit von DES") Die (Un-)Sicherheit von DES Sicherheit von DES: Bester praktischer Angriff ist noch immer die Brute-Force Suche. Die folgende Tabelle gibt eine Übersicht über DES Kryptanalysen. Jahr Projekt Zeit 1997
Die (Un-)Sicherheit von DES Sicherheit von DES: Bester praktischer Angriff ist noch immer die Brute-Force Suche. Die folgende Tabelle gibt eine Übersicht über DES Kryptanalysen. Jahr Projekt Zeit 1997
2 Teilbarkeit in Z. (a) Aus a b folgt a b und a b und a b und a b. (b) Aus a b und b c folgt a c.
 Aus a b folgt a b und a b und a b und a b. (b) Aus a b und b c folgt a c.") 2 Teilbarkeit in Z Bis auf weiteres stehen kleine Buchstaben für ganze Zahlen. Teilbarkeit. Sei a 0. Eine Zahl b heißt durch a teilbar, wenn es ein q gibt mit b = qa. Wir sagen dann auch: a teilt b (ist
2 Teilbarkeit in Z Bis auf weiteres stehen kleine Buchstaben für ganze Zahlen. Teilbarkeit. Sei a 0. Eine Zahl b heißt durch a teilbar, wenn es ein q gibt mit b = qa. Wir sagen dann auch: a teilt b (ist
Berechnungen mit dem Horner-Schema
 Berechnungen mit dem Horner-Schema Das Hornerschema kann als Rechenhilfsmittel zur Berechnung von Funktionswerten von Polynomfunktionen, zur Faktorisieriung von Polynomen alternativ zur Polynomdivision
Berechnungen mit dem Horner-Schema Das Hornerschema kann als Rechenhilfsmittel zur Berechnung von Funktionswerten von Polynomfunktionen, zur Faktorisieriung von Polynomen alternativ zur Polynomdivision
Algorithmik WS 07/ Vorlesung, Andreas Jakoby Universität zu Lübeck
 Lemma 15 KLP 1 ist genau dann lösbar, wenn das dazugehörige LP KLP 2 eine Lösung mit dem Wert Z = 0 besitzt. Ist Z = 0 für x 0, x 0, dann ist x eine zulässige Lösung von KLP 1. Beweis von Lemma 15: Nach
Lemma 15 KLP 1 ist genau dann lösbar, wenn das dazugehörige LP KLP 2 eine Lösung mit dem Wert Z = 0 besitzt. Ist Z = 0 für x 0, x 0, dann ist x eine zulässige Lösung von KLP 1. Beweis von Lemma 15: Nach
Corinne Schenka Vorkurs Mathematik WiSe 2012/13
 4. Lineare Gleichungssysteme Ein lineares Gleichungssystem ist ein System aus Gleichungen mit Unbekannten, die nur linear vorkommen. Dieses kann abkürzend auch in Matrizenschreibweise 1 notiert werden:
4. Lineare Gleichungssysteme Ein lineares Gleichungssystem ist ein System aus Gleichungen mit Unbekannten, die nur linear vorkommen. Dieses kann abkürzend auch in Matrizenschreibweise 1 notiert werden:
Wiederholung. Symmetrische Verfahren: klassische Verfahren / grundlegende Prinzipien: Substitution, Transposition, One-Time-Pad DES AES
 Wiederholung Symmetrische Verfahren: klassische Verfahren / grundlegende Prinzipien: Substitution, Transposition, One-Time-Pad DES AES Mathematische Grundlagen: algebraische Strukturen: Halbgruppe, Monoid,
Wiederholung Symmetrische Verfahren: klassische Verfahren / grundlegende Prinzipien: Substitution, Transposition, One-Time-Pad DES AES Mathematische Grundlagen: algebraische Strukturen: Halbgruppe, Monoid,
x A, x / A x ist (nicht) Element von A. A B, A B A ist (nicht) Teilmenge von B. A B, A B A ist (nicht) echte Teilmenge von B.
 Element von A. A B, A B A ist (nicht) Teilmenge von B. A B, A B A ist (nicht) echte Teilmenge von B.") SBP Mathe Grundkurs 1 # 0 by Clifford Wolf # 0 Antwort Diese Lernkarten sind sorgfältig erstellt worden, erheben aber weder Anspruch auf Richtigkeit noch auf Vollständigkeit. Das Lernen mit Lernkarten
SBP Mathe Grundkurs 1 # 0 by Clifford Wolf # 0 Antwort Diese Lernkarten sind sorgfältig erstellt worden, erheben aber weder Anspruch auf Richtigkeit noch auf Vollständigkeit. Das Lernen mit Lernkarten
SBP Mathe Grundkurs 1 # 0 by Clifford Wolf. SBP Mathe Grundkurs 1
 SBP Mathe Grundkurs 1 # 0 by Clifford Wolf SBP Mathe Grundkurs 1 # 0 Antwort Diese Lernkarten sind sorgfältig erstellt worden, erheben aber weder Anspruch auf Richtigkeit noch auf Vollständigkeit. Das
SBP Mathe Grundkurs 1 # 0 by Clifford Wolf SBP Mathe Grundkurs 1 # 0 Antwort Diese Lernkarten sind sorgfältig erstellt worden, erheben aber weder Anspruch auf Richtigkeit noch auf Vollständigkeit. Das
Gliederung. Links-Rechts-Zerlegung Elimination faktorisiert A = L R. Determinante Inverse. Kleinste Quadrate. Lösung durch. Links-Rechts- Zerlegung
 Matrixzerlegungen. 7. Vorlesung 170004 Numerische Methoden I Clemens Brand 29. April 2010 Gliederung Elimination faktorisiert A = L R Die A = L R Faktorisieren: Zerlege A in ein Produkt (einfacherer) Angenommen,
Matrixzerlegungen. 7. Vorlesung 170004 Numerische Methoden I Clemens Brand 29. April 2010 Gliederung Elimination faktorisiert A = L R Die A = L R Faktorisieren: Zerlege A in ein Produkt (einfacherer) Angenommen,
Kongruenz modulo g definiert auf K[x] eine Äquivalenzrelation g : h g f h f ist durch g teilbar, und [f] g ist die Äquivalenzklasse von f.
![Kongruenz modulo g definiert auf K[x] eine Äquivalenzrelation g : h g f h f ist durch g teilbar, und [f] g ist die Äquivalenzklasse von f.](/thumbs/57/40324422.jpg "Kongruenz modulo g definiert auf K[x] eine Äquivalenzrelation g : h g f h f ist durch g teilbar, und [f] g ist die Äquivalenzklasse von f.") 3 Kongruenz modulo g definiert auf K[x] eine Äquivalenzrelation g : h g f h f ist durch g teilbar, und [f] g ist die Äquivalenzklasse von f 4 Auf der Menge aller Restklassen [f] g kann man Addition und
3 Kongruenz modulo g definiert auf K[x] eine Äquivalenzrelation g : h g f h f ist durch g teilbar, und [f] g ist die Äquivalenzklasse von f 4 Auf der Menge aller Restklassen [f] g kann man Addition und