Lineare Algebra 1. Roger Burkhardt
|
|
|
- Josef Goldschmidt
- vor 6 Jahren
- Abrufe
Transkript
1 Lineare Algebra 1 Roger Burkhardt roger.burkhardt@fhnw.ch Fachhochschule Nordwestschweiz Hochschule für Technik Institut für Geistes- und Naturwissenschaft HS 2008/09
2 4
3 Einführung Vektoren und Translationen Vektoren, wie sie in der Vektorgeometrie verwendet werden, können mittels Translationen definiert werden. Wird ein Gegenstand translativ (d.h. geradlinig und ohne Rotation) von einer Ausgangsposition zu einer Zielposition verschoben, so führen alle Punkte des Gegenstandes die gleiche Bewegung durch. Diese Bewegung kann durch einen Pfeil beschrieben werden. Ein solcher Pfeil, oder eben ein Vektor, hat eine Richtung und eine Länge (Betrag) und ist durch diese beiden Eigenschaften vollständig beschrieben.
4 Einführung Für diese Objekte definiert man zwei grundsätzliche Operationen. Dies sind die Addition und die Multiplikation mit einem Skalar (z.b. einer reellen Zahl). Dabei versteht man unter der Summe von zwei Translationen die Translation, welche man erhält, wenn man die beiden Translationen nacheinander ausführt. v w w v Es ist einfach einsichtig, dass diese Operation kommutativ ist, d.h. es kommt nicht darauf an, welche der beiden Translationen als erstes ausgeführt wird.
5 Einführung Die zweite Grundoperation ist die Multiplikation mit einem Skalar. Diese kann als Streckung/Stauchung der Translation verstanden werden. Dabei wird die Länge aber nicht die Richtung verändert: v kv Wird mit einem negativen Skalar multipliziert, so bewirkt das negative Vorzeichen des Skalars zusätzlich eine Umkehrung der Richtung. Im speziellen bewirkt die Multiplikation mit 1, dass eine Translation gerade in die Gegenrichtung führt (Kehrvektor).
6 Einführung Linearkombinationen und Gesetze Mit den beiden Operationen können nun Linearkombinationen von Translationen (Vektoren) gebildet werden! Schreiben wir die Translationen als Vektoren, so verstehen wir unter einer Linearkombination der n Vektoren v 1, v 2,..., v n mit den Skalaren a 1, a 2,..., a n den Vektor: a 1 v 1 + a 2 v a n v n = Im weiteren gelten die folgenden Gesetze: n a k v k k=1 Die Addition von Vektoren ist assoziativ und kommutativ: v + ( w + u) = ( v + w) + u = v + w + u v + w = w + v
7 Einführung Bezüglich der Addition von Vektoren gibt es ein neutrales Element (Nullvektor - Vektor mit der Länge Null), welches zu einem beliebigen Vektor addiert keine Auswirkungen hat: v + 0 = 0 + v = v Zu jedem Vektor gibt es einen Kehrvektor, d.h. zu jedem Vektor existiert ein zweiter Vektor, so dass die Summe dieser beiden Vektoren den Nullvektor ergibt. Sei im weiteren K ein Körper (z.b. die Menge der reellen Zahlen), so gilt für die Multiplikation eines Vektors mit Skalaren aus K das Assoziativgesetz: a (b v) = (ab) v Im weiteren gelten die folgenden beiden Distributivgesetze: a ( v + w) = a v + a w (a + b) v = a v + b v
8 Einführung Lineare Unabhängigkeit Zudem ist das Produkt eines beliebigen Vektors mit dem Skalar 1 wieder gleich dem Vektor. Diese acht grundlegenden Gesetzte werden wir zu einem späteren Zeitpunkt nocheinmal aufrollen. Im Moment fahren wir mit den Translationen weiter. Die n Vektoren v 1, v 2,..., v n nennt man linear unabhängig, wenn sich keiner der Vektoren als Linearkombination der restlichen Vektoren darstellen lässt. Andernfalls nennt man die Vektoren linear abhängig (bei zwei Vektoren in der Vektorgeometrie spricht man von kollinearen, bei drei Vektoren von komplanaren Vektoren).
9 Einführung Beispiel Bei einem beliebigen Dreieck mit den Eckpunkten A, B und C können die drei Seiten als Vektoren beschrieben werden. Z.B. a = BC, b = CA und c = AB. Diese drei Vektoren sind linear abhängig, da z.b. der Vektor a als Linearkombination der beiden anderen Vektoren geschrieben werden kann: a = BC = BA + AC = b c b= CA A C c a= b c a= BC c= AB b B
10 Einführung Wenn man überprüfen muss, ob eine Anzahl von Vektoren linear unabhängig sind, hilft oft die Tatsache, dass der Nullvektor bei linear unabhängigen Vektoren nur mittels einer trivialen Linearkombination beschrieben werden kann (alle Vektoren mit dem Skalar 0 multipliziert), während bei linear abhängigen Vektoren neben der trivialen noch unendlich viele weitere Linearkombination möglich sind. Beispiel Im Dreieck des letzten Beispiels ist der Nullvektor aus den drei Vektoren a, b und c auf viele verschiedene Arten beschreibbar: 0 = 0 a + 0 b + 0 c = 1 a + 1 b + 1 c = 5 a 5 b 5 c = Werden aber nur zwei der drei Vektoren genommen, so existiert nur die triviale Linearkombination: 0 = 0 a + 0 b
11 Einführung Eine interessante Anwendung der linearen Unabhängigkeit ist der Beweis, dass sich in einem beliebigen Dreieck die Seitenhalbierenden im Verhältnis 1 : 2 teilen: Beispiel Um mit der linearen Unabhängigkeit von Vektoren diesen Satz zu beweisen, muss ein Nullvektor als Linearkombination unabhängiger Vektoren gebildet werden. b= AC C S M D c= AB B A S SA AM = 1 2 c AM MS SA= 0 MS M A
12 Einführung Fortsetzung Die beiden Seitenvektoren b und c sind linear unabhängig und es gilt (k und s sind Streckungsfaktoren): AM + MS + SA = 1 2 c + k MC + sda = ( 1 2 c + k 1 ) 2 c + b + s ( 12 b 12 ) c = ( k s ) ( b k 2 2) s c = 0 Da nur die triviale Linearkombination unabhängiger Vektoren den Nullvektor erzeugt, müssen die beiden Klammerausdrücke in der letzten Zeile gleich Null sein!
13 Einführung Fortsetzung Also gilt: Dieses lineare Gleichungssystem: ( k s 2 = k 2 s 2 = ) ( k s ) = ( ) hat die Lösung: k = 1 3 und s = 2 3. Das Verhältnis von k zu s gibt nun das gesuchte Teilungsverhältnis: 1 k s = 3 = 1 2 Die Erkenntnisse der Einführung lassen sich nun verallgemeinern. 2 3
14 Definition Definition Vektorraum Definition Ein Vektorraum über einen Körper K ist eine Menge V zusammen mit zwei Operationen: + : V V V : K V V (v, w) v + w (λ, v) λ v für welche die folgenden Bedingungen gelten: Addition von Vektoren: A1: u, v, w V (u + v) + w = u + (v + w) A2: u, v V u + v = v + u A3: 0 V, v V 0 + v = v + 0 = v A4: v V v V v + ( v) = ( v) + v = 0
15 Definition Fortsetzung Multiplikation mit einem Skalar: S1: λ, µ K, v V (λµ) v = λ (µv) S2: λ K, v, w V λ (v + w) = λv + λw S3: λ, µ K, v V (λ + µ) v = λv + µv S4: v V 1v = v Das Tripel (V, +, ) aus Menge V und den gegebenen Operationen + und nennt man einen Vektorraum über K. Ist K die Menge der reellen Zahlen, so spricht man von einem reellen Vektorraum. Bemerkung Die Vektoren aus der Vektorgeometrie (Translationen) bilden mit der besprochenen Vektoraddition und der Multiplikation mit einer reellen Zahl ein reellen Vektorraum.
16 Definition Vektorraum der reellen n-tupel Beispiel Das Tripel aus Menge der reellen n-tupel V = {(x 1, x 2,, x n )} mit x i R und der Vektoraddition: + : V V V (x 1, x 2,, x n ) + (y 1, y 2,, y n ) (x 1 + y 1, x 2 + y 2,, x n + y n ) und der Multiplikation mit einem reellen Skalar: : R V V λ (x 1, x 2,, x n ) (λx 1, λx 2,, λx n ) bilden einen reellen Vektorraum.
17 Definition Vektorraum der reellen Matrizen Beispiel Das Tripel aus Menge der reellen n m Matrizen V = { x R n m} und der behandelten Matrizenaddition: + : V V V (a ij ) + (b ij ) (a ij + b ij ) und Multiplikation einer Matrix mit einem reellen Skalar: bilden einen reellen Vektorraum. : R V V λ (a ij ) (λa ij )
18 Definition Vektorraum der Polynomfunktionen vom Grade n Beispiel Das Tripel aus Menge der reellen Polynomfunktionen V = { p (x) = n k=0 a kx k} mit a k R und den Operationen: + : V V V ( n ) ( n ) ( n ) a k x k + b k x k (a k + b k ) x k k=0 k=0 k=0 : R V V ( n ) ( n ) λ a k x k λa k x k k=0 bilden einen reellen Vektorraum. k=0
19 Definition Untervektorraum Sei (V, +, ) ein Vektorraum über K und U eine Teilmenge von V. Nun stellt sich die Frage, ob (U, +, ) mit den Verknüpfungen von V ebenfalls ein Vektorraum ist. Diese Frage beantwortet der nachfolgende Satz: Theorem Sei (V, +, ) ein Vektorraum über K und U eine Teilmenge von V, so nennt man U einen Untervektorraum von V, wenn U bezüglich der Verknüpfungen + und abgeschlossen ist, d.h. u, v U u + v U (1) λ K, v U λv U (2) Natürlich ist (U, +, ) ebenfalls ein Vektorraum!
20 Definition Beispiel Im Vektorraum der reellen n-tupel bildet die Menge U = {(x, 0, 0,, 0)} einen reellen Untervektorraum, da die Summe zweier beliebiger Elemente aus U wieder in U liegen: (x, 0, 0,, 0) + (y, 0, 0,, 0) = (x + y, 0, 0,, 0) U und die Multiplikation eines Elementes aus U mit einer beliebigen reellen Zahl ebenfalls in U liegt: λ (x, 0, 0,, 0) = (λx, 0, 0,, 0) U Bemerkung Gelten diese beiden Bedingungen, also bekommt man durch Linearkombinationen keine neuen Elemente, so sagt man die Menge ist abgeschlossen bezüglich den gegebenen Operationen.
21 Definition Beispiel Da die Summe zweier symmetrischer n n Matrizen wieder eine symmetrische Matrix ist und die Multiplikation einer symmetrischen Matrix mit einer reellen Zahl auch wieder symmetrisch ist, ist die Menge der symmetrischen n n Matrizen abgeschlossen bezüglich Matrizenaddition und Multiplikation mit einem Skalar. Daher ist die Menge der symmetrischen n n Matrizen ein Untervektorraum des Vektorraums der quadratischen n n Matrizen. Beispiel Die Summe zweier linearer Funktionen f (x) = mx + b ist wieder eine lineare Funktion und das Produkt einer linearen Funktion mit einer reellen Zahl ist auch wieder eine lineare Funktion. Daher ist die Menge der linearen Funktionen ein Untervektorraum des Vektorraums der reellen Polynomfunktionen n-ten Grades.
22 Definition Beispiel Die Menge der Tripel U = { (x, y, z) R 3 : x + 2y + 3z = 0 } beschreibt eine Ebene im dreidimensionalen reellen Raum (Vektorraum der reellen Tripel). Die Tripel der Menge U lassen sich z.b. wie folgt beschreiben (y und z sind frei wählbar): (x, y, z) = ( 2y 3z, y, z) Die Summe zweier solcher Tripel ergibt: ( 2y 1 3z 1, y 1, z 1 ) + ( 2y 2 3z 2, y 2, z 2 ) = ( 2 (y 1 + y 2 ) 3 (z 1 + z 2 ), y 1 + y 2, z 1 + z 2 ) U
 = ( 2λy 3λz, λy, λz) U Somit ist diese Ebene ein Untervektorraum des reellen dreidimensinalen")
23 Definition Fortsetzung Ein Element von U mit einer reellen Zahl multipliziert ergibt wieder ein Element aus U: λ ( 2y 2 3z 2, y 2, z 2 ) = ( 2λy 3λz, λy, λz) U Somit ist diese Ebene ein Untervektorraum des reellen dreidimensinalen Vektorraums.
24 Definition Die Ebene des letzten Beispiels beinhaltet den Ursprung des dreidimensionalen Raums (Tripel (0, 0, 0) ist der Nullvektor des Vektorraums). Wird die Ebene U parallel verschoben, so ist die neue Menge von Tripeln kein Untervektorraum mehr: Beispiel Die Menge der Tripel U = { (x, y, z) R 3 : ( 2y 3z + 5, y, z) } (alle Punkte von U werden um 5 in x-richtung verschoben!) bilden keinen Untervektorraum. Es gilt bei der Summe: Bemerkung ( 2y 1 3z 1 + 5, y 1, z 1 ) + ( 2y 2 3z 2 + 5, y 2, z 2 ) = ( 2 (y 1 + y 2 ) 3 (z 1 + z 2 ) + 10, y 1 + y 2, z 1 + z 2 ) / U Der Nullvektor ist immer Element des Untervektorraums!

25 Definition Bemerkung Sei U ein Untervektorraum des Vektorraums V und sei a ein Element von V, welches nicht im Untervektorraum liegt, so ist U = {v V : v = u + a, u U} kein Untervektorraum. Eine solche Menge nennt man einen affinen Raum (werden wir nicht speziell behandeln!).
26 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Lineare Hülle Eine Möglichkeit einen Untervektorraum zu bilden, ist mit gegebenen Vektoren alle möglichen Linearkombinationen zu bilden: Definition Seien v 1, v 2,..., v n Vektoren eines Vektorraums V. Die Menge L (v 1, v 2,..., v n ) := {λ 1 v 1 + λ 2 v λ n v n } V (3) aller Linearkombinationen von v 1, v 2,..., v n heisst die lineare Hülle des n-tupels (v 1, v 2,..., v n ) von Vektoren. Theorem Die lineare Hülle ist immer ein Untervektorraum.
 ist der Untervektorraum U = {λ (1, 1, 1)} = {(λ, λ, λ)}.")
27 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Beispiel Betrachten wir den dreidimensionalen rellen Vektorraum R 3 = {(x, y, z)}. Die lineare Hülle des Vektors v = (1, 1, 1) ist der Untervektorraum U = {λ (1, 1, 1)} = {(λ, λ, λ)}. Dies sind alle Punkte auf einer Geraden im R 3 :
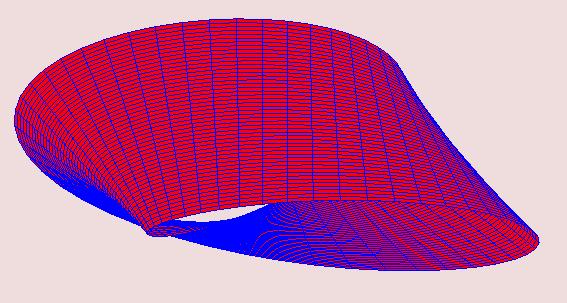
28 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Fortsetzung Die lineare Hülle der Vektoren v 1 = (1, 1, 1) und v 2 = (0, 0, 1) ist der Untervektorraum U = {λ 1 (1, 1, 1) + λ 2 (0, 0, 1)} = {(λ 1, λ 1, λ 1 + λ 2 )}. Dies sind alle Punkte auf einer Ebenen im R 3 :
 + λ 2 (0, 0, 1) + λ 3 (1, 1, 1)} = {(λ 1 + λ 3, λ 1 + λ 3, λ 1 + λ 2 )}.")
29 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Fortsetzung Die lineare Hülle der Vektoren v 1 = (1, 1, 1), v 2 = (0, 0, 1) und v 3 = (1, 1, 0) ist der Untervektorraum U = {λ 1 (1, 1, 1) + λ 2 (0, 0, 1) + λ 3 (1, 1, 1)} = {(λ 1 + λ 3, λ 1 + λ 3, λ 1 + λ 2 )}. Dies sind alle Punkte auf der vorigen Ebene:
30 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Mit der linearen Hülle können also aus einer kleinen Anzahl von Vektoren viele neue Vektoren gebildet werden! Dieser Sachverhalt wird uns im weiteren beschäftigen. Zudem haben wir in den letzten beiden Beispielen gesehen, dass mit unterschiedlichen Vektoren (oder auch mit einer unterschiedlichen Anzahl von Vektoren) die gleichen (Unter)-Vektoräume erzeugt werden können. Diese Tatsache ist sehr störend, da sie keine eindeutige Beschreibungsmöglichkeit der Vektoren des (Unter)-Vektorraums bewirkt. Um hier weiter zu kommen, brauchen wir nun wieder den Begriff der linearen Unabhängigkeit aus der Einführung!
31 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Lineare Unabhängigkeit Definition Die n Vektoren v 1, v 2,..., v n des Vektorraums V nennt man linear unabhängig, wenn sich keiner der Vektoren als Linearkombination der restlichen Vektoren darstellen lässt. Andernfalls nennt man die Vektoren linear abhängig. Theorem Die n Vektoren v 1, v 2,..., v n des Vektorraums V sind genau dann linear unabhängig, wenn der Nullvektor des Vektorraums nur mit einer trivialen Linearkombination gebildet werden kann: n λ k v k = λ 1 v 1 + λ 2 v λ n v n = 0 λ k = 0 k=1
32 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Beispiel Es soll gezeigt werden, dass die drei Vektoren v 1 = (1, 1, 1), v 2 = (0, 0, 1) und v 3 = (1, 1, 0) des Vektorraums der reellen Tripel linear abhängig sind. Dazu stellt man den Nullvektor als Linearkombination der drei Vektoren dar: λ 1 v 1 + λ 2 v 2 + λ 3 v 3 = λ 1 (1, 1, 1) + λ 2 (0, 0, 1) + λ 3 (1, 1, 0) = (λ 1 + λ 3, λ 1 + λ 3, λ 1 + λ 2 ) = (0, 0, 0) Dies führt zum folgenden linearen Gleichungssystem: λ λ 2 = λ 3 0
33 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Fortsetzung Dieses System besitzt neben der trivialen Nulllösung noch unendlich viele weitere Lösungen: λ λ 2 = λ 3 0 L = { (λ 1, λ 2, λ 3 ) R 3 : ( λ 3, λ 3, λ 3 ) } Die Lösung eingesetzt, zeigt nun, dass es unendlich viele Linearkombinationen gibt: λ 3 v 1 + λ 3 v 2 + λ 3 v 3 = 0 }{{} z.b. v 1 + v 2 + v 3 = 0
34 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Fortsetzung Diese letzte Gleichung kann nach einem der drei Vektoren aufgelöst werden. Für v 3 gilt: v 3 = v 1 v 2 Der Vektor v 3 lässt sich somit als Linearkombination der anderen beiden Vektoren schreiben! Diese Erkenntnis haben wir auch bei den letzten beiden Beispielen zur linearen Hülle erhalten. Die Hinzunahme des dritten Vektors hat auf die linearen Hülle keinen Einfluss gehabt: L (v 1, v 2 ) = L (v 1, v 2, v 3 )
35 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Beispiel Es soll gezeigt werden, dass die drei Polynome p 1 = 1, p 2 = 1 + x und p 3 = 1 + x + x 2 des Vektorraums der Polynome linear unabhängig sind. Dazu stellt man den Nullvektor (Nullpolynom p 0 = 0) als Linearkombination der drei Funktionen dar: λ 1 p 1 + λ 2 p 2 + λ 3 p 3 = λ 1 (1) + λ 2 (1 + x) + λ 3 ( 1 + x + x 2 ) = (λ 1 + λ 2 + λ 3 ) + (λ 2 + λ 3 ) x + (λ 3 ) x 2 = 0 = 0 + 0x + 0x 2 Dies führt zum folgenden linearen Gleichungssystem: λ λ 2 = λ 3 0 Da dieses System regulär ist besitzt es nur die triviale Nulllösung!
36 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Basis Linear unabhängige Vektoren besitzen die wichtige Eigenschaft: Theorem Seien die Vektoren v 1, v 2,..., v n linear unabängig, so lässt sich jeder Vektor im Vektorraum der linearen Hülle dieser Vektoren eindeutig als Linearkombination dieser Vektoren darstellen. Daher definiert man denn Begriff der Basis: Definition Sei V ein Vektorraum über K. Die Menge der n Vektoren {v 1, v 2,..., v n } V heisst eine Basis von V, wenn die Vektoren linear unabhängig sind und die lineare Hülle der Vektoren den ganzen Vektorraum aufspannen.
37 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Beispiel Betrachten wir die Translationen in einem reellen zwei- bzw. dreidimensionalen Raum mit einem kartesischen Koordinatensystem: y R 2 z R e y 1 1 e x x 2 1 e z 1 e x ey 1 2 y x Die Translationen mit der Länge 1 entlang den Koordinatenachsen bilden eine Basis der :
38 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Fortsetzung B R 2 = { e x, e y }, B R 3 = { e x, e y, e z } Nun lässt sich eine beliebige Translation eindeutig als Linearkombination dieser Basisvektoren beschreiben: y a=k x e x k y e y k y e y e y 1 e y e x e x k x e x x
39 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Fortsetzung Anstelle dieser aufwendigen Schreibweise in Form einer Linearkombination a = k x e x + k y e y verwendet man meistens die Komponentenschreibweise, wobei in einem Spaltenvektor (oder auch Zeilenvektor) die Koeffizienten der Linearkombination angegeben werden: ( ) kx a = k x e x + k y e y = Bemerkung Die in diesem Beispiel verwendete Basis ist die Standardbasis und man nennt diese auch die kanonische Basis! k y
40 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Beispiel Wir wollen zeigen, dass die drei Translationen b 1 = b 2 = und b 3 = , eine Basis des R 3 bilden. Dazu muss gezeigt werden, dass diese drei Translationen linear unabängig sind und sie den ganzen Vektorraum aufspannen. Dies kann in einem Schritt durchgeführt werden. Wir stellen dazu einen beliebigen Vektor als Linearkombination der gegebenen Vektoren dar: v = x y z = k 1 b1 + k 2 b2 + k 3 b3
41 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Fortsetzung Dies führt auf ein lineares Gleichungssystem mit den drei Unbekannten k 1,k 2 und k 3 (und den Parametren x, y und z): k k k 3 k 1 k 2 k = = Mit dem Gauss-Jordan-Verfahren bekommt man: k k 2 = k 3 x y z 2x+y+z 7 4x+5y 2z 7 5x+y+z 7 x y z
42 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Fortsetzung Das lineare Gleichungssystem ist somit regulär und hat (unabhängig von den Parameterwerten) eine eindeutige, einelementige Lösungsmenge. Daher kann auch der Nullvektor (x = y = z = 0) nur auf eine Art (triviale Linearkombination) dargestellt werden und die Vektoren sind daher linear unabhängig! Zudem können für die Parameter beliebige Werte eingesetzt werden und somit spannen die drei gegebenen Vektoren auch den gesamten Raum auf! Gilt z.b. x = y = z = 1, so findet man für diesen Vektor die folgenden Koeffizienten: k 1 k 2 k 3 = 2x+y+z 7 4x+5y 2z 7 5x+y+z 7 = =
43 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Fortsetzung Also gilt: = Beispiel Im Vektorraum der Polynome höchstens 4-ten Grades betrachten wir die Polynome (Legendre-Polynome): P 3 = 1 2 P 0 = 1, P 1 = x, P 2 = 1 2 ( 5x 3 3x ), P 4 = 1 8 ( 3x 2 1 ) ( 35x 4 30x )
44 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Fortsetzung Es soll gezeigt werden, dass diese Polynome eine Basis des Vektorraums bilden. Das Vorgehen ist analog zum letzten Beispiel - es wird ein allgemeines Polynom des Vektorraums als Linearkombination der gegebenen Vektoren gebildet: a 0 + a 1 x + a 2 x 2 + a 3 x 3 + a 4 x 4 = k 0 P 0 + k 1 P 1 + k 2 P 2 + k 3 P 3 + k 4 P 4 = (k k k 4)+(k k 3)x +( 3 2 k k 4)x k 3x k 4x 4 Koeffizientenvergleich führt auf das Gleichungssystem:
45 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Fortsetzung k 0 k 1 k 2 k 3 k 4 = Dieses System ist regulär und besitzt die eindeutige Lösung: k 0 a a a 4 k 1 k 2 k 3 = a a3 2 3 a a a 3 8 k 4 35 a 4 Die Polynome sind linear unabhängig und spannen den Vektorraum auf und bilden daher eine Basis. a 0 a 1 a 2 a 3 a 4
46 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Dimension In der Regel hat ein Vektorraum unendlich viele verschiedene Basen. Es gilt jedoch: Theorem Sind {v 1, v 2,..., v n } und {w 1, w 2,..., w m } Basen eines Vektorraums, so sind die beiden Basen gleichmächtig. Daher definiert man: Definition Unter der Dimension dim(v) eines Vektorraums V versteht man die Anzahl der Vektoren einer Basis. Besitzt ein Vektorraum eine endliche Basis {v 1, v 2,..., v n }, spricht man von einem endlich dimensionalen Vektorraum (dim(v) = n). Andernfalls spricht man von einem unendlich dimensionalen Vektorraum (dim(v) = ).
47 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Beispiel Die der Translationen in den zwei- und dreidimensionalen reellen Räumen sind zwei- bzw. dreidimensional. Beispiel Für den Vektorraum der n m Matrizen gilt: dim ( R n m) = nm. Beispiel Der Vektorraum der Polynome ist unendlich dimensional. Eine mögliche Basis ist: B = { 1, x, x 2, x 3,... }.
48 Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension 4 Einführung Vektoren und Translationen Linearkombinationen und Gesetze Lineare Unabhängigkeit Definition Vektorraum Untervektorraum Lineare Hülle, Lineare Unabhängigkeit, Basis und Dimension Lineare Hülle Lineare Unabhängigkeit Basis Dimension
Lineare Algebra - alles was man wissen muß
 Statistik für Bioinformatiker SoSe 3 Rainer Spang Lineare Algebra - alles was man wissen muß Der Titel ist natürlich gelogen, aber was wir hier zusammengetragen haben ist zumindest ein Anfang. Weniger
Statistik für Bioinformatiker SoSe 3 Rainer Spang Lineare Algebra - alles was man wissen muß Der Titel ist natürlich gelogen, aber was wir hier zusammengetragen haben ist zumindest ein Anfang. Weniger
Übungen zum Ferienkurs Lineare Algebra WS 14/15
 Übungen zum Ferienkurs Lineare Algebra WS 14/15 Linearkombinationen, Basen, Lineare Abbildungen 2.1 Lineare Unabhängigkeit Sind die folgenden Vektoren linear unabhängig? (a) 1, 2, 3 im Q Vektorraum R (b)
Übungen zum Ferienkurs Lineare Algebra WS 14/15 Linearkombinationen, Basen, Lineare Abbildungen 2.1 Lineare Unabhängigkeit Sind die folgenden Vektoren linear unabhängig? (a) 1, 2, 3 im Q Vektorraum R (b)
klar. Um die zweite Bedingung zu zeigen, betrachte u i U i mit u i = 0. Das mittlere -Zeichen liefert s
 Nachtrag zur allgemeinen Vektorraum-Theorie. 1.5.15. Direkte Summen. Sei V ein Vektorraum, seien U 1,..., U t Unterräume, wir schreiben V = U 1 U 2 U t = t i=1 U i falls die folgenden beiden Bedingungen
Nachtrag zur allgemeinen Vektorraum-Theorie. 1.5.15. Direkte Summen. Sei V ein Vektorraum, seien U 1,..., U t Unterräume, wir schreiben V = U 1 U 2 U t = t i=1 U i falls die folgenden beiden Bedingungen
u + v = v + u. u + (v + w) = (u + v) + w. 0 V + v = v + 0 V = v v + u = u + v = 0 V. t (u + v) = t u + t v, (t + s) u = t u + s u.
 = (u + v) + w. 0 V + v = v + 0 V = v v + u = u + v = 0 V. t (u + v) = t u + t v, (t + s) u = t u + s u.") Universität Stuttgart Fachbereich Mathematik Prof. Dr. C. Hesse PD Dr. P. H. Lesky Dipl. Math. D. Zimmermann Msc. J. Köllner FAQ 3 Höhere Mathematik I 4..03 el, kyb, mecha, phys Vektorräume Vektorräume
Universität Stuttgart Fachbereich Mathematik Prof. Dr. C. Hesse PD Dr. P. H. Lesky Dipl. Math. D. Zimmermann Msc. J. Köllner FAQ 3 Höhere Mathematik I 4..03 el, kyb, mecha, phys Vektorräume Vektorräume
Mathematik für Informatiker II. Beispiellösungen zur Probeklausur. Aufgabe 1. Aufgabe 2 (5+5 Punkte) Christoph Eisinger Sommersemester 2011
 Christoph Eisinger Sommersemester 2011") Mathematik für Informatiker II Christoph Eisinger Sommersemester 211 Beispiellösungen zur Probeklausur Aufgabe 1 Gegeben sind die Polynome f, g, h K[x]. Zu zeigen: Es gibt genau dann Polynome h 1 und h
Mathematik für Informatiker II Christoph Eisinger Sommersemester 211 Beispiellösungen zur Probeklausur Aufgabe 1 Gegeben sind die Polynome f, g, h K[x]. Zu zeigen: Es gibt genau dann Polynome h 1 und h
Erinnerung/Zusammenfassung zu Abbildungsmatrizen
 Erinnerung/Zusammenfassung zu Abbildungsmatrizen Thomas Coutandin (cthomas@student.ethz.ch) 7. November 2 Abbildungsmatrizen Im Folgenden betrachten wir stets endlich dimensionale K-Vektorräume (K irgend
Erinnerung/Zusammenfassung zu Abbildungsmatrizen Thomas Coutandin (cthomas@student.ethz.ch) 7. November 2 Abbildungsmatrizen Im Folgenden betrachten wir stets endlich dimensionale K-Vektorräume (K irgend
2 Die Darstellung linearer Abbildungen durch Matrizen
 2 Die Darstellung linearer Abbildungen durch Matrizen V und V seien Vektorräume über einem Körper K. Hom K (V, V ) bezeichnet die Menge der K linearen Abbildungen von V nach V. Wir machen Hom K (V, V )
2 Die Darstellung linearer Abbildungen durch Matrizen V und V seien Vektorräume über einem Körper K. Hom K (V, V ) bezeichnet die Menge der K linearen Abbildungen von V nach V. Wir machen Hom K (V, V )
Matrixalgebra. mit einer Einführung in lineare Modelle. Stefan Lang Institut für Statistik Ludwigstrasse 33 email: lang@stat.uni-muenchen.
 Matrixalgebra mit einer Einführung in lineare Modelle Stefan Lang Institut für Statistik Ludwigstrasse 33 email: lang@statuni-muenchende 25 August 24 Vielen Dank an Christiane Belitz, Manuela Hummel und
Matrixalgebra mit einer Einführung in lineare Modelle Stefan Lang Institut für Statistik Ludwigstrasse 33 email: lang@statuni-muenchende 25 August 24 Vielen Dank an Christiane Belitz, Manuela Hummel und
Definition 27 Affiner Raum über Vektorraum V
 Definition 27 Affiner Raum über Vektorraum V Definition 27 Affiner Raum über Vektorraum V ist die Menge A = Definition 27 Affiner Raum über Vektorraum V ist die Menge A = mit einer Abbildung + : A V A,
Definition 27 Affiner Raum über Vektorraum V Definition 27 Affiner Raum über Vektorraum V ist die Menge A = Definition 27 Affiner Raum über Vektorraum V ist die Menge A = mit einer Abbildung + : A V A,
Gleichungen - Aufgabenstellung und Lösungsstrategien
 Gleichungen - Aufgabenstellung und Lösungsstrategien Franz Pauer Institut für Mathematik, Universität Innsbruck, Technikerstr. 25, A-6020 Innsbruck, Österreich. Franz.Pauer@uibk.ac.at 18. Juli 2006 1 Einleitung
Gleichungen - Aufgabenstellung und Lösungsstrategien Franz Pauer Institut für Mathematik, Universität Innsbruck, Technikerstr. 25, A-6020 Innsbruck, Österreich. Franz.Pauer@uibk.ac.at 18. Juli 2006 1 Einleitung
x 2 2x + = 3 + Es gibt genau ein x R mit ax + b = 0, denn es gilt
 - 17 - Die Frage ist hier also: Für welche x R gilt x = x + 1? Das ist eine quadratische Gleichung für x. Es gilt x = x + 1 x x 3 = 0, und man kann quadratische Ergänzung machen:... ( ) ( ) x x + = 3 +
- 17 - Die Frage ist hier also: Für welche x R gilt x = x + 1? Das ist eine quadratische Gleichung für x. Es gilt x = x + 1 x x 3 = 0, und man kann quadratische Ergänzung machen:... ( ) ( ) x x + = 3 +
Lösungen zum 3. Aufgabenblatt
 SS, Lineare Algebra Die Lösungen wurden erstellt von: Isabel Voigt, Vanessa Lamm und Matthias Rehder Hinweis: Eine Liste der zur Bearbeitung verwendeten Literatur ist unter www.mathematiwelt.com aufrufbar.
SS, Lineare Algebra Die Lösungen wurden erstellt von: Isabel Voigt, Vanessa Lamm und Matthias Rehder Hinweis: Eine Liste der zur Bearbeitung verwendeten Literatur ist unter www.mathematiwelt.com aufrufbar.
Lineare Gleichungssysteme
 Lineare Gleichungssysteme Eines der am häufigsten auftretenden Standardprobleme der angewandten Mathematik ist das Lösen linearer Gleichungssysteme, etwa zur Netzwerkberechnung in der Elektrotechnik oder
Lineare Gleichungssysteme Eines der am häufigsten auftretenden Standardprobleme der angewandten Mathematik ist das Lösen linearer Gleichungssysteme, etwa zur Netzwerkberechnung in der Elektrotechnik oder
Lineare Gleichungssysteme
 Lineare Gleichungssysteme Sei K ein Körper, a ij K für 1 i m, 1 j n. Weiters seien b 1,..., b m K. Dann heißt a 11 x 1 + a 12 x 2 +... + a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... + a 2n x n = b 2... a m1
Lineare Gleichungssysteme Sei K ein Körper, a ij K für 1 i m, 1 j n. Weiters seien b 1,..., b m K. Dann heißt a 11 x 1 + a 12 x 2 +... + a 1n x n = b 1 a 21 x 1 + a 22 x 2 +... + a 2n x n = b 2... a m1
Mathematik 1. Inhaltsverzeichnis. Prof. Dr. K. Melzer. karin.melzer@hs-esslingen.de http://www.hs-esslingen.de/de/mitarbeiter/karin-melzer.
 Mathematik 1 Prof Dr K Melzer karinmelzer@hs-esslingende http://wwwhs-esslingende/de/mitarbeiter/karin-melzerhtml Inhaltsverzeichnis 1 Matrizenrechnung 2 11 Matrixbegri 2 12 Spezielle Matrizen 3 13 Rechnen
Mathematik 1 Prof Dr K Melzer karinmelzer@hs-esslingende http://wwwhs-esslingende/de/mitarbeiter/karin-melzerhtml Inhaltsverzeichnis 1 Matrizenrechnung 2 11 Matrixbegri 2 12 Spezielle Matrizen 3 13 Rechnen
Einführung in die Vektor- und Matrizenrechnung. Matrizen
 Einführung in die Vektor- und Matrizenrechnung Matrizen Definition einer Matrix Unter einer (reellen) m x n Matrix A versteht man ein rechteckiges Schema aus reellen Zahlen, die wie folgt angeordnet sind:
Einführung in die Vektor- und Matrizenrechnung Matrizen Definition einer Matrix Unter einer (reellen) m x n Matrix A versteht man ein rechteckiges Schema aus reellen Zahlen, die wie folgt angeordnet sind:
3.3 Eigenwerte und Eigenräume, Diagonalisierung
 3.3 Eigenwerte und Eigenräume, Diagonalisierung Definition und Lemma 3.3.1. Sei V ein K-Vektorraum, φ End K (V ), λ K. Wir defnieren den zu λ gehörigen Eigenraum von φ als Dies ist ein Unterraum von V.
3.3 Eigenwerte und Eigenräume, Diagonalisierung Definition und Lemma 3.3.1. Sei V ein K-Vektorraum, φ End K (V ), λ K. Wir defnieren den zu λ gehörigen Eigenraum von φ als Dies ist ein Unterraum von V.
0, v 6 = 2 2. 1, v 4 = 1. 2. span(v 1, v 5, v 6 ) = span(v 1, v 2, v 3, v 4, v 5, v 6 ) 4. span(v 1, v 2, v 4 ) = span(v 2, v 3, v 5, v 6 )
 = span(v 1, v 2, v 3, v 4, v 5, v 6 ) 4. span(v 1, v 2, v 4 ) = span(v 2, v 3, v 5, v 6 )") Aufgabe 65. Ganz schön span(n)end. Gegeben sei folgende Menge M von 6 Vektoren v, v,..., v 6 R 4 aus Aufgabe P 6: M = v =, v =, v =, v 4 =, v 5 =, v 6 = Welche der folgenden Aussagen sind wahr? span(v,
Aufgabe 65. Ganz schön span(n)end. Gegeben sei folgende Menge M von 6 Vektoren v, v,..., v 6 R 4 aus Aufgabe P 6: M = v =, v =, v =, v 4 =, v 5 =, v 6 = Welche der folgenden Aussagen sind wahr? span(v,
Bestimmung einer ersten
 Kapitel 6 Bestimmung einer ersten zulässigen Basislösung Ein Problem, was man für die Durchführung der Simplexmethode lösen muss, ist die Bestimmung einer ersten zulässigen Basislösung. Wie gut das geht,
Kapitel 6 Bestimmung einer ersten zulässigen Basislösung Ein Problem, was man für die Durchführung der Simplexmethode lösen muss, ist die Bestimmung einer ersten zulässigen Basislösung. Wie gut das geht,
3.1. Die komplexen Zahlen
 3.1. Die komplexen Zahlen Es gibt viele Wege, um komplexe Zahlen einzuführen. Wir gehen hier den wohl einfachsten, indem wir C R als komplexe Zahlenebene und die Punkte dieser Ebene als komplexe Zahlen
3.1. Die komplexen Zahlen Es gibt viele Wege, um komplexe Zahlen einzuführen. Wir gehen hier den wohl einfachsten, indem wir C R als komplexe Zahlenebene und die Punkte dieser Ebene als komplexe Zahlen
Lineare Algebra und Computer Grafik
 Lineare Algebra und Computer Grafik Vorlesung an der Hochschule Heilbronn (Stand: 7 Mai ) Prof Dr V Stahl Copyright 6 by Volker Stahl All rights reserved Inhaltsverzeichnis Vektoren 4 Vektoren und Skalare
Lineare Algebra und Computer Grafik Vorlesung an der Hochschule Heilbronn (Stand: 7 Mai ) Prof Dr V Stahl Copyright 6 by Volker Stahl All rights reserved Inhaltsverzeichnis Vektoren 4 Vektoren und Skalare
Leitfaden Lineare Algebra: Determinanten
 Leitfaden Lineare Algebra: Determinanten Die symmetrische Gruppe S n. Eine Permutation σ der Menge S ist eine bijektive Abbildung σ : S S. Ist S eine endliche Menge, so reicht es zu verlangen, dass σ injektiv
Leitfaden Lineare Algebra: Determinanten Die symmetrische Gruppe S n. Eine Permutation σ der Menge S ist eine bijektive Abbildung σ : S S. Ist S eine endliche Menge, so reicht es zu verlangen, dass σ injektiv
Lineare Algebra und Lösung linearer zeitinvarianter Differentialgleichungssysteme
 Übung Lineare Algebra und Lösung linearer zeitinvarianter Differentialgleichungssysteme Diese Übung beschäftigt sich mit Grundbegriffen der linearen Algebra. Im Speziellen werden lineare Abbildungen, sowie
Übung Lineare Algebra und Lösung linearer zeitinvarianter Differentialgleichungssysteme Diese Übung beschäftigt sich mit Grundbegriffen der linearen Algebra. Im Speziellen werden lineare Abbildungen, sowie
ax 2 + bx + c = 0, (4.1)
") Kapitel 4 Komplexe Zahlen Wenn wir uns auf die reellen Zahlen beschränken, ist die Operation des Wurzelziehens (also die Umkehrung der Potenzierung) nicht immer möglich. Zum Beispiel können wir nicht die
Kapitel 4 Komplexe Zahlen Wenn wir uns auf die reellen Zahlen beschränken, ist die Operation des Wurzelziehens (also die Umkehrung der Potenzierung) nicht immer möglich. Zum Beispiel können wir nicht die
Mathematischer Vorkurs für Physiker WS 2009/10
 TU München Prof. Dr. P. Vogl, Dr. S. Schlicht Mathematischer Vorkurs für Physiker WS 2009/10 Vorlesung 1, Montag vormittag Vektoralgebra Ein Vektor lässt sich geometrisch als eine gerichtete Strecke darstellen,
TU München Prof. Dr. P. Vogl, Dr. S. Schlicht Mathematischer Vorkurs für Physiker WS 2009/10 Vorlesung 1, Montag vormittag Vektoralgebra Ein Vektor lässt sich geometrisch als eine gerichtete Strecke darstellen,
Lineare Gleichungssysteme
 Brückenkurs Mathematik TU Dresden 2015 Lineare Gleichungssysteme Schwerpunkte: Modellbildung geometrische Interpretation Lösungsmethoden Prof. Dr. F. Schuricht TU Dresden, Fachbereich Mathematik auf der
Brückenkurs Mathematik TU Dresden 2015 Lineare Gleichungssysteme Schwerpunkte: Modellbildung geometrische Interpretation Lösungsmethoden Prof. Dr. F. Schuricht TU Dresden, Fachbereich Mathematik auf der
Übungsaufgaben LAAG I. für Lehramtsstudenten GS, MS, BS
 Doz.Dr. Norbert Koksch TU DRESDEN Fachrichtung Mathematik, Institut für Analysis Übungsaufgaben LAAG I für Lehramtsstudenten GS, MS, BS Logik: Übungsaufgabe 1. Begründen Sie, ob es sich um eine Aussage
Doz.Dr. Norbert Koksch TU DRESDEN Fachrichtung Mathematik, Institut für Analysis Übungsaufgaben LAAG I für Lehramtsstudenten GS, MS, BS Logik: Übungsaufgabe 1. Begründen Sie, ob es sich um eine Aussage
KAPITEL 0. Einführung
 Lineare Algebra KAPITEL 0 Einführung Dieses Skript zur Vorlesung Lineare Algebra an der Goethe Universität Frankfurt im Sommersemester 2011 befindet sich noch in der Entstehung und wird fortlaufend aktualisiert
Lineare Algebra KAPITEL 0 Einführung Dieses Skript zur Vorlesung Lineare Algebra an der Goethe Universität Frankfurt im Sommersemester 2011 befindet sich noch in der Entstehung und wird fortlaufend aktualisiert
Basis und Dimension. Als nächstes wollen wir die wichtigen Begriffe Erzeugendensystem und Basis eines Vektorraums definieren.
 Basis und Dimension Als nächstes wollen wir die wichtigen Begriffe Erzeugendensystem und Basis eines Vektorraums definieren. Definition. Sei V ein K-Vektorraum und (v i ) i I eine Familie von Vektoren
Basis und Dimension Als nächstes wollen wir die wichtigen Begriffe Erzeugendensystem und Basis eines Vektorraums definieren. Definition. Sei V ein K-Vektorraum und (v i ) i I eine Familie von Vektoren
H. Gruber, R. Neumann. Erfolg im Mathe-Abi. Übungsbuch für die optimale Vorbereitung in Analysis, Geometrie und Stochastik mit verständlichen Lösungen
 H. Gruber, R. Neumann Erfolg im Mathe-Abi Übungsbuch für die optimale Vorbereitung in Analysis, Geometrie und Stochastik mit verständlichen Lösungen Inhaltsverzeichnis Inhaltsverzeichnis Analysis Von der
H. Gruber, R. Neumann Erfolg im Mathe-Abi Übungsbuch für die optimale Vorbereitung in Analysis, Geometrie und Stochastik mit verständlichen Lösungen Inhaltsverzeichnis Inhaltsverzeichnis Analysis Von der
TECHNISCHE UNIVERSITÄT MÜNCHEN. Abzählbarkeit, Injektivität, Sürjektivität und Bijektivität
 TECHNISCHE UNIVERSITÄT MÜNCHEN Zentrum Mathematik Prof. Dr. Friedrich Roesler Ralf Franken, PhD Max Lein Lineare Algebra 1 WS 26/7 en Blatt 4 13.11.26 Abzählbarkeit, Injektivität, Sürjektivität und Bijektivität
TECHNISCHE UNIVERSITÄT MÜNCHEN Zentrum Mathematik Prof. Dr. Friedrich Roesler Ralf Franken, PhD Max Lein Lineare Algebra 1 WS 26/7 en Blatt 4 13.11.26 Abzählbarkeit, Injektivität, Sürjektivität und Bijektivität
Kapitel 0. Einführung. 0.1 Was ist Computergrafik? 0.2 Anwendungsgebiete
 Kapitel 0 Einführung 0.1 Was ist Computergrafik? Software, die einen Computer dazu bringt, eine grafische Ausgabe (oder kurz gesagt: Bilder) zu produzieren. Bilder können sein: Fotos, Schaltpläne, Veranschaulichung
Kapitel 0 Einführung 0.1 Was ist Computergrafik? Software, die einen Computer dazu bringt, eine grafische Ausgabe (oder kurz gesagt: Bilder) zu produzieren. Bilder können sein: Fotos, Schaltpläne, Veranschaulichung
Vorlesung. Funktionen/Abbildungen 1
 Vorlesung Funktionen/Abbildungen 1 1 Grundlagen Hinweis: In dieser Vorlesung werden Funktionen und Abbildungen synonym verwendet. In der Schule wird eine Funktion häufig als eindeutige Zuordnung definiert.
Vorlesung Funktionen/Abbildungen 1 1 Grundlagen Hinweis: In dieser Vorlesung werden Funktionen und Abbildungen synonym verwendet. In der Schule wird eine Funktion häufig als eindeutige Zuordnung definiert.
A Matrix-Algebra. A.1 Definition und elementare Operationen
 A Matrix-Algebra In diesem Anhang geben wir eine kompakte Einführung in die Matrizenrechnung bzw Matrix-Algebra Eine leicht lesbare Einführung mit sehr vielen Beispielen bietet die Einführung in die Moderne
A Matrix-Algebra In diesem Anhang geben wir eine kompakte Einführung in die Matrizenrechnung bzw Matrix-Algebra Eine leicht lesbare Einführung mit sehr vielen Beispielen bietet die Einführung in die Moderne
Geometrische Maße oder,... wie kann man quantitative Aussagen über geometrische Objekte erhalten?
 In der euklidischen Geometrie der Mittelstufe ging es zumeist um geometrische Konstruktionen und um qualitative Aussagen über geometrische Objekte in Bezug zueinander. Möchte man, insbesondere im dreidimensionalen
In der euklidischen Geometrie der Mittelstufe ging es zumeist um geometrische Konstruktionen und um qualitative Aussagen über geometrische Objekte in Bezug zueinander. Möchte man, insbesondere im dreidimensionalen
Kapitel 15. Lösung linearer Gleichungssysteme
 Kapitel 15. Lösung linearer Gleichungssysteme Lineare Gleichungssysteme Wir befassen uns nun mit der Lösung im allgemeinen nichthomogener linearer Gleichungssysteme in zweifacher Hinsicht. Wir studieren
Kapitel 15. Lösung linearer Gleichungssysteme Lineare Gleichungssysteme Wir befassen uns nun mit der Lösung im allgemeinen nichthomogener linearer Gleichungssysteme in zweifacher Hinsicht. Wir studieren
Lineare Algebra (Mathe I) für Wirtschaftsinformatiker; Zusammenfassung
 für Wirtschaftsinformatiker; Zusammenfassung") Lineare Algebra (Mathe I) für Wirtschaftsinformatiker; Zusammenfassung Artur Trzewik sw562@uni-essen.de v1., 26.3.1998 korrigiert 16. Februar 2 Zusammenfassung Warnung: für die Richtigkeit der Definitionnen
Lineare Algebra (Mathe I) für Wirtschaftsinformatiker; Zusammenfassung Artur Trzewik sw562@uni-essen.de v1., 26.3.1998 korrigiert 16. Februar 2 Zusammenfassung Warnung: für die Richtigkeit der Definitionnen
4. Übungsblatt Matrikelnr.: 6423043
 Lineare Algebra I 1. Name: Bleeck, Christian 4. Übungsblatt Matrikelnr.: 6423043 Abgabe: 15.11.06 12 Uhr (Kasten D1 320) Übungsgruppe: 03 Patrick Schützdeller 2. Name: Niemann, Philipp Matrikelnr.: 6388613
Lineare Algebra I 1. Name: Bleeck, Christian 4. Übungsblatt Matrikelnr.: 6423043 Abgabe: 15.11.06 12 Uhr (Kasten D1 320) Übungsgruppe: 03 Patrick Schützdeller 2. Name: Niemann, Philipp Matrikelnr.: 6388613
Vorwort. Günter M. Gramlich. Lineare Algebra. Eine Einführung ISBN: 978-3-446-43035-8. Weitere Informationen oder Bestellungen unter
 Vorwort Günter M. Gramlich Lineare Algebra Eine Einführung ISBN: 978-3-446-43035-8 Weitere Informationen oder Bestellungen unter http://www.hanser.de/978-3-446-43035-8 sowie im Buchhandel. Carl Hanser
Vorwort Günter M. Gramlich Lineare Algebra Eine Einführung ISBN: 978-3-446-43035-8 Weitere Informationen oder Bestellungen unter http://www.hanser.de/978-3-446-43035-8 sowie im Buchhandel. Carl Hanser
Zuammenfassung: Reelle Funktionen
 Zuammenfassung: Reelle Funktionen 1 Grundlegendes a) Zahlenmengen IN = {1; 2; 3; 4;...} Natürliche Zahlen IN 0 = IN {0} Natürliche Zahlen mit 0 ZZ = {... ; 2; 1; 0; 1; 2;...} Ganze Zahlen Q = { z z ZZ,
Zuammenfassung: Reelle Funktionen 1 Grundlegendes a) Zahlenmengen IN = {1; 2; 3; 4;...} Natürliche Zahlen IN 0 = IN {0} Natürliche Zahlen mit 0 ZZ = {... ; 2; 1; 0; 1; 2;...} Ganze Zahlen Q = { z z ZZ,
ARBEITSUNTERLAGEN ZUR VORLESUNG UND ÜBUNG AN DER UNIVERSITÄT DES SAARLANDES LINEARE OPTIMIERUNG
 ¾ REITSUNTERLGEN ZUR VORLESUNG UND ÜUNG N DER UNIVERSITÄT DES SRLNDES LINERE OPTIMIERUNG IM SS Lineare Optimierung (SS ). ufgabe (Graphische Lineare Optimierung) Nach einem anstrengenden Semester steht
¾ REITSUNTERLGEN ZUR VORLESUNG UND ÜUNG N DER UNIVERSITÄT DES SRLNDES LINERE OPTIMIERUNG IM SS Lineare Optimierung (SS ). ufgabe (Graphische Lineare Optimierung) Nach einem anstrengenden Semester steht
Elemente der Analysis I Kapitel 2: Einführung II, Gleichungen
 Elemente der Analysis I Kapitel 2: Einführung II, Gleichungen Prof. Dr. Volker Schulz Universität Trier / FB IV / Abt. Mathematik 8. November 2010 http://www.mathematik.uni-trier.de/ schulz/elan-ws1011.html
Elemente der Analysis I Kapitel 2: Einführung II, Gleichungen Prof. Dr. Volker Schulz Universität Trier / FB IV / Abt. Mathematik 8. November 2010 http://www.mathematik.uni-trier.de/ schulz/elan-ws1011.html
Seminararbeit für das SE Reine Mathematik- Graphentheorie
 Seminararbeit für das SE Reine Mathematik- Graphentheorie Der binäre Rang, der symplektische Graph, die Spektralzerlegung und rationale Funktionen Vortrag am 24.01.2012 Heike Farkas 0410052 Inhaltsverzeichnis
Seminararbeit für das SE Reine Mathematik- Graphentheorie Der binäre Rang, der symplektische Graph, die Spektralzerlegung und rationale Funktionen Vortrag am 24.01.2012 Heike Farkas 0410052 Inhaltsverzeichnis
Elemente der Analysis II
 Elemente der Analysis II Kapitel 3: Lineare Abbildungen und Gleichungssysteme Informationen zur Vorlesung: http://www.mathematik.uni-trier.de/ wengenroth/ J. Wengenroth () 15. Mai 2009 1 / 35 3.1 Beispiel
Elemente der Analysis II Kapitel 3: Lineare Abbildungen und Gleichungssysteme Informationen zur Vorlesung: http://www.mathematik.uni-trier.de/ wengenroth/ J. Wengenroth () 15. Mai 2009 1 / 35 3.1 Beispiel
Höhere Mathematik 3. Apl. Prof. Dr. Norbert Knarr. Wintersemester 2015/16. FB Mathematik
 Höhere Mathematik 3 Apl. Prof. Dr. Norbert Knarr FB Mathematik Wintersemester 2015/16 4. Homogene lineare Dierentialgleichungen 4.1. Grundbegrie 4.1.1. Denition. Es sei J R ein Intervall und a 0 ; : :
Höhere Mathematik 3 Apl. Prof. Dr. Norbert Knarr FB Mathematik Wintersemester 2015/16 4. Homogene lineare Dierentialgleichungen 4.1. Grundbegrie 4.1.1. Denition. Es sei J R ein Intervall und a 0 ; : :
Eigenwerte und Eigenvektoren von Matrizen
 Eigenwerte und Eigenvektoren von Matrizen Das Eigenwertproblem Sei A eine quadratische Matrix vom Typ m,m. Die Aufgabe, eine Zahl λ und einen dazugehörigen Vektor x zu finden, damit Ax = λx ist, nennt
Eigenwerte und Eigenvektoren von Matrizen Das Eigenwertproblem Sei A eine quadratische Matrix vom Typ m,m. Die Aufgabe, eine Zahl λ und einen dazugehörigen Vektor x zu finden, damit Ax = λx ist, nennt
Vorlesung. Komplexe Zahlen
 Vorlesung Komplexe Zahlen Motivation Am Anfang der Entwicklung der komplexen Zahlen stand ein algebraisches Problem: die Bestimmung der Lösung der Gleichung x 2 + 1 = 0. 1 Mit der Lösung dieses Problems
Vorlesung Komplexe Zahlen Motivation Am Anfang der Entwicklung der komplexen Zahlen stand ein algebraisches Problem: die Bestimmung der Lösung der Gleichung x 2 + 1 = 0. 1 Mit der Lösung dieses Problems
2 Algebraische Grundstrukturen
 2 ALGEBRAISCHE GRUNDSTRUKTUREN 1 8. November 2002 2 Algebraische Grundstrukturen Definitionen. Eine binäre Operation (binary operation) oder zweistellige Verknüpfung auf einer Menge M ist eine Abbildung
2 ALGEBRAISCHE GRUNDSTRUKTUREN 1 8. November 2002 2 Algebraische Grundstrukturen Definitionen. Eine binäre Operation (binary operation) oder zweistellige Verknüpfung auf einer Menge M ist eine Abbildung
Lineare Algebra für Informatiker TUM Sommersemester 2011 Dozent: Christian Pötzsche
 Lineare Algebra für Informatiker TUM Sommersemester 20 Dozent: Christian Pötzsche Janosch Maier 3. Juli 20 Herzlichen Dank an Lucas Westermann, Florian Scheibner (https://github. com/lswest/lamitschrift)
Lineare Algebra für Informatiker TUM Sommersemester 20 Dozent: Christian Pötzsche Janosch Maier 3. Juli 20 Herzlichen Dank an Lucas Westermann, Florian Scheibner (https://github. com/lswest/lamitschrift)
LINEARE ALGEBRA Ferienkurs. Hanna Schäfer Philipp Gadow
 LINEARE ALGERA Ferienkurs Hanna Schäfer Philipp Gadow INHALT Eigenwerte und Eigenvektoren. asiswechsel.2 Eigenwertgleichung 2.3 Diagonalisierbarkeit 5.4 Trigonalisierung 8.5 Zusatzmaterial 8 Aufgaben 9
LINEARE ALGERA Ferienkurs Hanna Schäfer Philipp Gadow INHALT Eigenwerte und Eigenvektoren. asiswechsel.2 Eigenwertgleichung 2.3 Diagonalisierbarkeit 5.4 Trigonalisierung 8.5 Zusatzmaterial 8 Aufgaben 9
Kapitel 3 Mathematik. Kapitel 3.3. Algebra Gleichungen
 TG TECHNOLOGISCHE GRUNDLAGEN Kapitel 3 Mathematik Kapitel 3.3 Algebra Gleichungen Verfasser: Hans-Rudolf Niederberger Elektroingenieur FH/HTL Vordergut 1, 877 Nidfurn 055-654 1 87 Ausgabe: Februar 009
TG TECHNOLOGISCHE GRUNDLAGEN Kapitel 3 Mathematik Kapitel 3.3 Algebra Gleichungen Verfasser: Hans-Rudolf Niederberger Elektroingenieur FH/HTL Vordergut 1, 877 Nidfurn 055-654 1 87 Ausgabe: Februar 009
Division Für diesen Abschnitt setzen wir voraus, dass der Koeffizientenring ein Körper ist. Betrachte das Schema
 Division Für diesen Abschnitt setzen wir voraus, dass der Koeffizientenring ein Körper ist. Betrachte das Schema 2x 4 + x 3 + x + 3 div x 2 + x 1 = 2x 2 x + 3 (2x 4 + 2x 3 2x 2 ) x 3 + 2x 2 + x + 3 ( x
Division Für diesen Abschnitt setzen wir voraus, dass der Koeffizientenring ein Körper ist. Betrachte das Schema 2x 4 + x 3 + x + 3 div x 2 + x 1 = 2x 2 x + 3 (2x 4 + 2x 3 2x 2 ) x 3 + 2x 2 + x + 3 ( x
Minimale Darstellungen, Kommutator- und Fixräume, projektive Geometrie
 Notation Die in dieser Arbeit verwendete Notation ist im Wesentlichen Standard, so wie sie beispielsweise in [As] zu nden ist. Einige Abweichungen hiervon, Klarstellungen und zusätzliche Notationen (sofern
Notation Die in dieser Arbeit verwendete Notation ist im Wesentlichen Standard, so wie sie beispielsweise in [As] zu nden ist. Einige Abweichungen hiervon, Klarstellungen und zusätzliche Notationen (sofern
11. Primfaktorzerlegungen
 78 Andreas Gathmann 11 Primfaktorzerlegungen Euch ist sicher aus der Schule bekannt, dass sich jede positive ganze Zahl a als Produkt a = p 1 p n von Primzahlen schreiben lässt, und dass diese Darstellung
78 Andreas Gathmann 11 Primfaktorzerlegungen Euch ist sicher aus der Schule bekannt, dass sich jede positive ganze Zahl a als Produkt a = p 1 p n von Primzahlen schreiben lässt, und dass diese Darstellung
Q(n) = n 0 +n 1 +n 2 +...+n k.
 = n 0 +n 1 +n 2 +...+n k.") 25 2 Kongruenzen Mit Hilfe der hier definierten Kongruenz können Aussagen über Teilbarkeit einfacher formuliert und bewiesen werden, und man erhält eine Differenzierung der Zahlen, die bezüglich einer
25 2 Kongruenzen Mit Hilfe der hier definierten Kongruenz können Aussagen über Teilbarkeit einfacher formuliert und bewiesen werden, und man erhält eine Differenzierung der Zahlen, die bezüglich einer
Kochen mit Jordan. Vorbereitungen. Schnellzubereitung. JNF für Genießer wenn s noch etwas mehr sein darf
 Kochen mit Jordan Vorbereitungen Man nehme eine Matrix A R n n und bestimme ihr charakteristisches Polynom p(λ) = (λ c ) r (λ c j ) rj C[X] Dabei gilt: algebraische Vielfachheit r j ˆ= Länge des Jordanblocks
Kochen mit Jordan Vorbereitungen Man nehme eine Matrix A R n n und bestimme ihr charakteristisches Polynom p(λ) = (λ c ) r (λ c j ) rj C[X] Dabei gilt: algebraische Vielfachheit r j ˆ= Länge des Jordanblocks
Weiterbildung und Zusatzausbildung der PHZ Luzern Interessantes und Spannendes aus der Welt der Mathematik September 2006, Dieter Ortner
 Weiterbildung und Zusatzausbildung der PHZ Luzern Interessantes und Spannendes aus der Welt der Mathematik September 2006, Dieter Ortner Rechengesetze 1. Rechengesetze für natürliche Zahlen Es geht um
Weiterbildung und Zusatzausbildung der PHZ Luzern Interessantes und Spannendes aus der Welt der Mathematik September 2006, Dieter Ortner Rechengesetze 1. Rechengesetze für natürliche Zahlen Es geht um
Beispiel zur Lösung eines Gleichungssystems : 6 y + z = 15 0 6 1. 15 12 x + 3 y 3 z = 15 12 3 3. 15 2 x 3 y = 4 2 3 0.
 Beispiel zur Lösung eines Gleichungssystems : 6 y + z = 5 0 6 5 2 x + 3 y 3 z = 5 2 3 3 5 2 x 3 y = 4 2 3 0 4 z2 /3 z : 3 2 x 3 y = 4 2 3 0 4 4 x + y z = 5 4 5 6 y + z = 5 0 6 5 z2 + 2 z 2 x 3 y = 4 2
Beispiel zur Lösung eines Gleichungssystems : 6 y + z = 5 0 6 5 2 x + 3 y 3 z = 5 2 3 3 5 2 x 3 y = 4 2 3 0 4 z2 /3 z : 3 2 x 3 y = 4 2 3 0 4 4 x + y z = 5 4 5 6 y + z = 5 0 6 5 z2 + 2 z 2 x 3 y = 4 2
Einführung in die Algebra
 Prof. Dr. H. Brenner Osnabrück SS 2009 Einführung in die Algebra Vorlesung 13 Einheiten Definition 13.1. Ein Element u in einem Ring R heißt Einheit, wenn es ein Element v R gibt mit uv = vu = 1. DasElementv
Prof. Dr. H. Brenner Osnabrück SS 2009 Einführung in die Algebra Vorlesung 13 Einheiten Definition 13.1. Ein Element u in einem Ring R heißt Einheit, wenn es ein Element v R gibt mit uv = vu = 1. DasElementv
1 Lineare Gleichungssysteme
 MLAN1 1 LINEARE GLEICHUNGSSYSTEME 1 Literatur: K Nipp/D Stoffer, Lineare Algebra, Eine Einführung für Ingenieure, VDF der ETHZ, 4 Auflage, 1998, oder neuer 1 Lineare Gleichungssysteme Zu den grundlegenden
MLAN1 1 LINEARE GLEICHUNGSSYSTEME 1 Literatur: K Nipp/D Stoffer, Lineare Algebra, Eine Einführung für Ingenieure, VDF der ETHZ, 4 Auflage, 1998, oder neuer 1 Lineare Gleichungssysteme Zu den grundlegenden
Vektorgeometrie. mathenachhilfe.ch. Version: 28. Dezember 2007 (Bitte nur für den Eigengebrauch verwenden) 1. Mathematische Operationen für Vektoren
 1. Mathematische Operationen für Vektoren") Vektorgeometrie Version: 28. Dezemer 2007 Bitte nur für den Eigengerauch verwenden) mathenachhilfe.ch. Mathematische Operationen für Vektoren Addition + a + 3 = a + + + 3 + Sutraktion a 3 = a 3 Skalare
Vektorgeometrie Version: 28. Dezemer 2007 Bitte nur für den Eigengerauch verwenden) mathenachhilfe.ch. Mathematische Operationen für Vektoren Addition + a + 3 = a + + + 3 + Sutraktion a 3 = a 3 Skalare
Invariantentheorie. Vorlesung 5. Invariantenringe zu Untergruppen
 Prof. Dr. H. Brenner Osnabrück WS 2012/2013 Invariantentheorie Vorlesung 5 Invariantenringe zu Untergruppen Proposition 5.1. Es sei R G R eine Operation einer Gruppe G auf einem kommutativen Ring durch
Prof. Dr. H. Brenner Osnabrück WS 2012/2013 Invariantentheorie Vorlesung 5 Invariantenringe zu Untergruppen Proposition 5.1. Es sei R G R eine Operation einer Gruppe G auf einem kommutativen Ring durch
Algebraische Kurven. Vorlesung 26. Die Schnittmultiplizität
 Prof. Dr. H. Brenner Osnabrück SS 2012 Algebraische Kurven Vorlesung 26 Die Schnittmultiplizität Es seien zwei ebene algebraische Kurven C,D A 2 K gegeben, die keine Komponente gemeinsam haben. Dann besteht
Prof. Dr. H. Brenner Osnabrück SS 2012 Algebraische Kurven Vorlesung 26 Die Schnittmultiplizität Es seien zwei ebene algebraische Kurven C,D A 2 K gegeben, die keine Komponente gemeinsam haben. Dann besteht
Leitprogramm Vektorgeometrie
 Leitprogramm Vektorgeometrie Torsten Linnemann Pädagogische Hochschule FHNW Gymnasium Oberwil E-mail:torsten.linnemann@fhnw.ch 18. September 2011 Dank: Ich danke der Klasse 4aL, Kantonsschule Solothurn,
Leitprogramm Vektorgeometrie Torsten Linnemann Pädagogische Hochschule FHNW Gymnasium Oberwil E-mail:torsten.linnemann@fhnw.ch 18. September 2011 Dank: Ich danke der Klasse 4aL, Kantonsschule Solothurn,
Die Gleichung A x = a hat für A 0 die eindeutig bestimmte Lösung. Für A=0 und a 0 existiert keine Lösung.
 Lineare Gleichungen mit einer Unbekannten Die Grundform der linearen Gleichung mit einer Unbekannten x lautet A x = a Dabei sind A, a reelle Zahlen. Die Gleichung lösen heißt, alle reellen Zahlen anzugeben,
Lineare Gleichungen mit einer Unbekannten Die Grundform der linearen Gleichung mit einer Unbekannten x lautet A x = a Dabei sind A, a reelle Zahlen. Die Gleichung lösen heißt, alle reellen Zahlen anzugeben,
Einführung in die Kodierungstheorie
 Einführung in die Kodierungstheorie Einführung Vorgehen Beispiele Definitionen (Code, Codewort, Alphabet, Länge) Hamming-Distanz Definitionen (Äquivalenz, Coderate, ) Singleton-Schranke Lineare Codes Hamming-Gewicht
Einführung in die Kodierungstheorie Einführung Vorgehen Beispiele Definitionen (Code, Codewort, Alphabet, Länge) Hamming-Distanz Definitionen (Äquivalenz, Coderate, ) Singleton-Schranke Lineare Codes Hamming-Gewicht
Probestudium der Physik: Mathematische Grundlagen
 Probestudium der Physik: Mathematische Grundlagen Ludger Santen 1. Februar 2013 Fachrichtung Theoretische Physik, Universität des Saarlandes, Saarbrücken 1 Einführung Die Mathematik ist die Sprache der
Probestudium der Physik: Mathematische Grundlagen Ludger Santen 1. Februar 2013 Fachrichtung Theoretische Physik, Universität des Saarlandes, Saarbrücken 1 Einführung Die Mathematik ist die Sprache der
11 Normalformen von Matrizen
 11 Normalformen von Matrizen Wir wenden uns in diesem Kapitel noch einmal der Untersuchung linearer Abbildungen auf endlichdimensionalen Vektorräumen und deren Darstellung mittels Matrizen zu Speziell
11 Normalformen von Matrizen Wir wenden uns in diesem Kapitel noch einmal der Untersuchung linearer Abbildungen auf endlichdimensionalen Vektorräumen und deren Darstellung mittels Matrizen zu Speziell
Optimalitätskriterien
 Kapitel 4 Optimalitätskriterien Als Optimalitätskriterien bezeichnet man notwendige oder hinreichende Bedingungen dafür, dass ein x 0 Ω R n Lösung eines Optimierungsproblems ist. Diese Kriterien besitzen
Kapitel 4 Optimalitätskriterien Als Optimalitätskriterien bezeichnet man notwendige oder hinreichende Bedingungen dafür, dass ein x 0 Ω R n Lösung eines Optimierungsproblems ist. Diese Kriterien besitzen
6 Symmetrische Matrizen und quadratische Formen
 Mathematik für Ingenieure II, SS 9 Freitag. $Id: quadrat.tex,v.5 9//5 ::59 hk Exp $ $Id: orthogonal.tex,v.4 9// ::54 hk Exp $ $Id: fourier.tex,v. 9// :: hk Exp $ Symmetrische Matrizen und quadratische
Mathematik für Ingenieure II, SS 9 Freitag. $Id: quadrat.tex,v.5 9//5 ::59 hk Exp $ $Id: orthogonal.tex,v.4 9// ::54 hk Exp $ $Id: fourier.tex,v. 9// :: hk Exp $ Symmetrische Matrizen und quadratische
Fehlerkorrigierende Codes
 Fehlerkorrigierende Codes SS 2013 Gerhard Dorfer 2 Inhaltsverzeichnis 1 Fehlerkorrigierende Codes 4 1.1 Einführende Beispiele................................. 4 1.2 Mathematische Grundlagen..............................
Fehlerkorrigierende Codes SS 2013 Gerhard Dorfer 2 Inhaltsverzeichnis 1 Fehlerkorrigierende Codes 4 1.1 Einführende Beispiele................................. 4 1.2 Mathematische Grundlagen..............................
Mathematik II für Studierende der Informatik Kapitel. Kodierungstheorie
 Mathematik II für Studierende der Informatik Kapitel Kodierungstheorie Markus Junker Sommersemester 2011 (korrigierte Version vom Sommersemester 2012) Einführung, Beispiele, Definitionen Ausgangspunkt
Mathematik II für Studierende der Informatik Kapitel Kodierungstheorie Markus Junker Sommersemester 2011 (korrigierte Version vom Sommersemester 2012) Einführung, Beispiele, Definitionen Ausgangspunkt
Schlussrechnung, Modellbildung und Interpolation
 Schlussrechnung, Modellbildung und Interpolation Franz Pauer Institut für Mathematik, Universität Innsbruck, Technikerstr. 13, A-6020 Innsbruck, Österreich. Franz.Pauer@uibk.ac.at 1 Einleitung Schlussrechnungen
Schlussrechnung, Modellbildung und Interpolation Franz Pauer Institut für Mathematik, Universität Innsbruck, Technikerstr. 13, A-6020 Innsbruck, Österreich. Franz.Pauer@uibk.ac.at 1 Einleitung Schlussrechnungen
Austausch- bzw. Übergangsprozesse und Gleichgewichtsverteilungen
 Austausch- bzw. Übergangsrozesse und Gleichgewichtsverteilungen Wir betrachten ein System mit verschiedenen Zuständen, zwischen denen ein Austausch stattfinden kann. Etwa soziale Schichten in einer Gesellschaft:
Austausch- bzw. Übergangsrozesse und Gleichgewichtsverteilungen Wir betrachten ein System mit verschiedenen Zuständen, zwischen denen ein Austausch stattfinden kann. Etwa soziale Schichten in einer Gesellschaft:
Statistische Methoden
 Statistische Methoden Dr CJ Luchsinger 6 Repetition: Rechnen mit Matrizen für die Statistik Matrizen sind aus zwei Gründen für die Statistik sehr wichtig: Sie ermöglichen uns einerseits eine sehr elegante
Statistische Methoden Dr CJ Luchsinger 6 Repetition: Rechnen mit Matrizen für die Statistik Matrizen sind aus zwei Gründen für die Statistik sehr wichtig: Sie ermöglichen uns einerseits eine sehr elegante
Musterlösungen zur Linearen Algebra II Blatt 5
 Musterlösungen zur Linearen Algebra II Blatt 5 Aufgabe. Man betrachte die Matrix A := über dem Körper R und über dem Körper F und bestimme jeweils die Jordan- Normalform. Beweis. Das charakteristische
Musterlösungen zur Linearen Algebra II Blatt 5 Aufgabe. Man betrachte die Matrix A := über dem Körper R und über dem Körper F und bestimme jeweils die Jordan- Normalform. Beweis. Das charakteristische
Vorlesung 12 22. bzw. 23. Januar 2014. Determinanten 1. Cramersche Regel
 Vorlesung 2 22 bzw 23 Januar 204 Lineares Gleichungssystem a a 2 b b 2 = F a a 2 a 3 b b 2 b 3 c c 2 c 3 = V V =< a, b c > c b a b a F V Seite 70 a x + a 2 x 2 + a 3 x 3 b = 0 < a x + a 2 x 2 + a 3 x 3
Vorlesung 2 22 bzw 23 Januar 204 Lineares Gleichungssystem a a 2 b b 2 = F a a 2 a 3 b b 2 b 3 c c 2 c 3 = V V =< a, b c > c b a b a F V Seite 70 a x + a 2 x 2 + a 3 x 3 b = 0 < a x + a 2 x 2 + a 3 x 3
Computer Vision I. Nikos Canterakis. Lehrstuhl für Mustererkennung, Universität Freiburg
 Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 8 Projektive Invarianz und das kanonische Kamerapaar Kanonisches Kamerapaar aus gegebener Fundamentalmatrix Freiheitsgrade
Nikos Canterakis Lehrstuhl für Mustererkennung, Universität Freiburg Gliederung 8 Projektive Invarianz und das kanonische Kamerapaar Kanonisches Kamerapaar aus gegebener Fundamentalmatrix Freiheitsgrade
Kevin Caldwell. 18.April 2012
 im Rahmen des Proseminars Numerische Lineare Algebra von Prof.Dr.Sven Beuchler 18.April 2012 Gliederung 1 2 3 Mathematische Beschreibung von naturwissenschaftlich-technischen Problemstellungen führt häufig
im Rahmen des Proseminars Numerische Lineare Algebra von Prof.Dr.Sven Beuchler 18.April 2012 Gliederung 1 2 3 Mathematische Beschreibung von naturwissenschaftlich-technischen Problemstellungen führt häufig
2.1 Codes: einige Grundbegriffe
 Gitter und Codes c Rudolf Scharlau 2. Mai 2009 51 2.1 Codes: einige Grundbegriffe Wir stellen die wichtigsten Grundbegriffe für Codes über dem Alphabet F q, also über einem endlichen Körper mit q Elementen
Gitter und Codes c Rudolf Scharlau 2. Mai 2009 51 2.1 Codes: einige Grundbegriffe Wir stellen die wichtigsten Grundbegriffe für Codes über dem Alphabet F q, also über einem endlichen Körper mit q Elementen
Einführung in die Zahlentheorie und algebraische Strukturen
 Einführung in die Zahlentheorie und algebraische Strukturen Wintersemester 2012/2013 Universität Bayreuth Michael Stoll Inhaltsverzeichnis 1. Wiederholung: Gruppen, Ringe, Körper 2 2. Teilbarkeitslehre
Einführung in die Zahlentheorie und algebraische Strukturen Wintersemester 2012/2013 Universität Bayreuth Michael Stoll Inhaltsverzeichnis 1. Wiederholung: Gruppen, Ringe, Körper 2 2. Teilbarkeitslehre
Computer Vision: 3D-Geometrie. D. Schlesinger () Computer Vision: 3D-Geometrie 1 / 17
 Computer Vision: 3D-Geometrie 1 / 17") Computer Vision: 3D-Geometrie D. Schlesinger () Computer Vision: 3D-Geometrie 1 / 17 Lochkamera Modell C Projektionszentrum, Optische Achse, Bildebene, P Hauptpunkt (optische Achse kreuzt die Bildebene),
Computer Vision: 3D-Geometrie D. Schlesinger () Computer Vision: 3D-Geometrie 1 / 17 Lochkamera Modell C Projektionszentrum, Optische Achse, Bildebene, P Hauptpunkt (optische Achse kreuzt die Bildebene),
Kapitel 4. Euklidische Ringe und die Jordansche Normalform. 4.1 Euklidische Ringe
 Kapitel 4 Euklidische Ringe und die Jordansche Normalform 4.1 Euklidische Ringe Die Ringe der ganzen Zahlen, Z, sowie Polynomringe über Körpern, K[X], wobei K ein Körper ist, haben die folgenden Gemeinsamheiten:
Kapitel 4 Euklidische Ringe und die Jordansche Normalform 4.1 Euklidische Ringe Die Ringe der ganzen Zahlen, Z, sowie Polynomringe über Körpern, K[X], wobei K ein Körper ist, haben die folgenden Gemeinsamheiten:
Grundstrukturen: Speicherorganisation und Zahlenmengen
 Zahlendarstellung Zahlen und ihre Darstellung in Digitalrechnern Grundstrukturen: Speicherorganisation und Zahlenmengen Linear organisierter Speicher zu einer Adresse gehört ein Speicher mit 3 Bit-Zellen
Zahlendarstellung Zahlen und ihre Darstellung in Digitalrechnern Grundstrukturen: Speicherorganisation und Zahlenmengen Linear organisierter Speicher zu einer Adresse gehört ein Speicher mit 3 Bit-Zellen
3. LINEARE GLEICHUNGSSYSTEME
 176 3. LINEARE GLEICHUNGSSYSTEME 90 Vitamin-C-Gehalt verschiedener Säfte 18,0 mg 35,0 mg 12,5 mg 1. a) 100 ml + 50 ml + 50 ml = 41,75 mg 100 ml 100 ml 100 ml b) : Menge an Kirschsaft in ml y: Menge an
176 3. LINEARE GLEICHUNGSSYSTEME 90 Vitamin-C-Gehalt verschiedener Säfte 18,0 mg 35,0 mg 12,5 mg 1. a) 100 ml + 50 ml + 50 ml = 41,75 mg 100 ml 100 ml 100 ml b) : Menge an Kirschsaft in ml y: Menge an
Welche Lagen können zwei Geraden (im Raum) zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen?
 zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen?") Welche Lagen können zwei Geraden (im Raum) zueinander haben? Welche Lagen können zwei Ebenen (im Raum) zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen? Wie heiÿt
Welche Lagen können zwei Geraden (im Raum) zueinander haben? Welche Lagen können zwei Ebenen (im Raum) zueinander haben? Welche Lagen kann eine Gerade bezüglich einer Ebene im Raum einnehmen? Wie heiÿt
Übung 4: Einführung in die Programmierung mit MATLAB
 Übung 4: Einführung in die Programmierung mit MATLAB AUFGABE 1 Was bewirkt der Strichpunkt? - Der Strichpunkt (Semikola) unterdrück die Anzeige der (Zwischen-) Resultate. Welche Rolle spielt ans? - Wenn
Übung 4: Einführung in die Programmierung mit MATLAB AUFGABE 1 Was bewirkt der Strichpunkt? - Der Strichpunkt (Semikola) unterdrück die Anzeige der (Zwischen-) Resultate. Welche Rolle spielt ans? - Wenn
Lineare Gleichungssysteme
 Lineare Gleichungssysteme 1 Zwei Gleichungen mit zwei Unbekannten Es kommt häufig vor, dass man nicht mit einer Variablen alleine auskommt, um ein Problem zu lösen. Das folgende Beispiel soll dies verdeutlichen
Lineare Gleichungssysteme 1 Zwei Gleichungen mit zwei Unbekannten Es kommt häufig vor, dass man nicht mit einer Variablen alleine auskommt, um ein Problem zu lösen. Das folgende Beispiel soll dies verdeutlichen
DIFFERENTIALGLEICHUNGEN
 DIFFERENTIALGLEICHUNGEN GRUNDBEGRIFFE Differentialgleichung Eine Gleichung, in der Ableitungen einer unbekannten Funktion y = y(x) bis zur n-ten Ordnung auftreten, heisst gewöhnliche Differentialgleichung
DIFFERENTIALGLEICHUNGEN GRUNDBEGRIFFE Differentialgleichung Eine Gleichung, in der Ableitungen einer unbekannten Funktion y = y(x) bis zur n-ten Ordnung auftreten, heisst gewöhnliche Differentialgleichung
OPERATIONS-RESEARCH (OR)
") OPERATIONS-RESEARCH (OR) Man versteht darunter die Anwendung mathematischer Methoden und Modelle zur Vorbereitung optimaler Entscheidungen bei einem Unternehmen. Andere deutsche und englische Bezeichnungen:
OPERATIONS-RESEARCH (OR) Man versteht darunter die Anwendung mathematischer Methoden und Modelle zur Vorbereitung optimaler Entscheidungen bei einem Unternehmen. Andere deutsche und englische Bezeichnungen:
7 Die Determinante einer Matrix
 7 Die Determinante einer Matrix ( ) a11 a Die Determinante einer 2 2 Matrix A = 12 ist erklärt als a 21 a 22 det A := a 11 a 22 a 12 a 21 Es ist S 2 = { id, τ}, τ = (1, 2) und sign (id) = 1, sign (τ) =
7 Die Determinante einer Matrix ( ) a11 a Die Determinante einer 2 2 Matrix A = 12 ist erklärt als a 21 a 22 det A := a 11 a 22 a 12 a 21 Es ist S 2 = { id, τ}, τ = (1, 2) und sign (id) = 1, sign (τ) =
Didaktik der Zahlbereiche 4. Die Menge der ganzen Zahlen. Mathematikunterricht in der Jahrgangsstufe 7. Zahlbereichserweiterungen in der Hauptschule
 Zahlbereichserweiterungen in der Hauptschule Didaktik der Zahlbereiche 4 Dr. Christian Groß Lehrstuhl Didaktik der Mathematik Universität Augsburg Wintersemester 2006/07 Natürliche Zahlen, : Klasse 5 positive
Zahlbereichserweiterungen in der Hauptschule Didaktik der Zahlbereiche 4 Dr. Christian Groß Lehrstuhl Didaktik der Mathematik Universität Augsburg Wintersemester 2006/07 Natürliche Zahlen, : Klasse 5 positive
Ausgewählte Aufgaben zum Grundbereich des Staatsexamens in Mathematik. Lineare Algebra. zusammengestellt von
 Ausgewählte Aufgaben zum Grundbereich des Staatsexamens in Mathematik Lineare Algebra zusammengestellt von Sabine Giese, Josef Heringlehner, Birgit Mielke, Hans Mielke und Ralph-Hardo Schulz 98 Aufgaben,
Ausgewählte Aufgaben zum Grundbereich des Staatsexamens in Mathematik Lineare Algebra zusammengestellt von Sabine Giese, Josef Heringlehner, Birgit Mielke, Hans Mielke und Ralph-Hardo Schulz 98 Aufgaben,
Formelsammlung Mathematische Grundlagen für die Informatik
 Formelsammlung Mathematische Grundlagen für die Informatik Wolfgang Führer wolfgang.fuehrer@web.de August 2007 Inhaltsverzeichnis Lineare Algebra. Vektorräume.................................... Abelsche
Formelsammlung Mathematische Grundlagen für die Informatik Wolfgang Führer wolfgang.fuehrer@web.de August 2007 Inhaltsverzeichnis Lineare Algebra. Vektorräume.................................... Abelsche
Euklidischer Algorithmus, Restklassenring und seine Struktur, Chinesischer Restklassensatz
 Tobias Kraushaar Kaiserstr. 178 44143 Dortmund Matr.- Nr.: 122964 Euklidischer Algorithmus, Restklassenring und seine Struktur, Chinesischer Restklassensatz 1. EINLEITUNG... 2 2. HAUPTTEIL... 3 2.1. Der
Tobias Kraushaar Kaiserstr. 178 44143 Dortmund Matr.- Nr.: 122964 Euklidischer Algorithmus, Restklassenring und seine Struktur, Chinesischer Restklassensatz 1. EINLEITUNG... 2 2. HAUPTTEIL... 3 2.1. Der
Inhaltsverzeichnis 1 Lineare Gleichungssysteme I
 Inhaltsverzeichnis 1 Lineare Gleichungssysteme I 3 1.1 Mengen und Abbildungen....................................... 3 1.1.1 Mengen und ihre Operationen.............................. 3 1.1.2 Summen- und
Inhaltsverzeichnis 1 Lineare Gleichungssysteme I 3 1.1 Mengen und Abbildungen....................................... 3 1.1.1 Mengen und ihre Operationen.............................. 3 1.1.2 Summen- und
GF(2 2 ) Beispiel eines Erweiterungskörpers (1)
 Beispiel eines Erweiterungskörpers (1)") GF(2 2 ) Beispiel eines Erweiterungskörpers (1) Im Kapitel 2.1 wurde bereits gezeigt, dass die endliche Zahlenmenge {0, 1, 2, 3} q = 4 nicht die Eigenschaften eines Galoisfeldes GF(4) erfüllt. Vielmehr
GF(2 2 ) Beispiel eines Erweiterungskörpers (1) Im Kapitel 2.1 wurde bereits gezeigt, dass die endliche Zahlenmenge {0, 1, 2, 3} q = 4 nicht die Eigenschaften eines Galoisfeldes GF(4) erfüllt. Vielmehr
2: Zahlentheorie / Restklassen 2.1: Modulare Arithmetik
 Stefan Lucks Diskrete Strukturen (WS 2009/10) 57 2: Zahlentheorie / Restklassen 2.1: Modulare Arithmetik Uhr: Stunden mod 24, Minuten mod 60, Sekunden mod 60,... Rechnerarithmetik: mod 2 w, w {8, 16, 32,
Stefan Lucks Diskrete Strukturen (WS 2009/10) 57 2: Zahlentheorie / Restklassen 2.1: Modulare Arithmetik Uhr: Stunden mod 24, Minuten mod 60, Sekunden mod 60,... Rechnerarithmetik: mod 2 w, w {8, 16, 32,
Einführung in die Vektorgeometrie und Lineare Algebra
 Vektorgeometrie und Lineare Algebra 1 Einführung in die Vektorgeometrie und Lineare Algebra Anhang: Anleitung zur Nutzung des Computer-Algebra-Systems MAPLE in der Linearen Algebra Prof. Siegfried Krauter
Vektorgeometrie und Lineare Algebra 1 Einführung in die Vektorgeometrie und Lineare Algebra Anhang: Anleitung zur Nutzung des Computer-Algebra-Systems MAPLE in der Linearen Algebra Prof. Siegfried Krauter