Deutsche Dokumentation von ihrem Elektronik-Lieferanten: Inteligentes Motorboard (12V/6A) mit I2C-Bus
|
|
|
- Max Kaiser
- vor 8 Jahren
- Abrufe
Transkript
1 Datenblatt und Doku zu Motorboard MD23 Inteligentes Motorboard (12V/6A) mit I2C-Bus Spezielle intelligente Roboter-Motoransteuerung für 2 Motoren mit jeweils bis zu 3A Dauerbelastung. Ausgelegt für eine Betriebsspannung von 12 Volt und ideal passend zu unseren EMG30-Motoren mit eingebautem Drehgeber, Stecker paßt direkt in das Board. Aber auch für andere Motoren geeignet. Angesteuert wird der Motortreiber über den beliebten I2C-Bus. Dabei sind zwei Betriebsarten möglich. Entweder die manuelle Methode wobei man beide Motoren unabhängig voneinander über den I2C-Bus ansteuert. Die Zahlimpulse kann man in dieser Betriebsart über Register abrufen. Oder aber eine Art intelligenter Modi bei dem man nur Geschwindigkeit und Lenkinformationen übermittelt und sich der Motor selbst um die Steuerung und Drehzahlregelung kümmert. Dabei sind verschiedene Verzögerungen (Rampen) einstellbar. Auch der Motorstrom kann über den I2C-Bus abgerufen werden. Seite 1 von 21

2 Die wichtigsten Features: Steckerkompatibel zu unseren EMG Motoren mit eingebautem Drehgeber (siehe robotikhardware.de) Betriebsspannung: ca. 12V 5V Logikspannung über Onboard Spannungsregler 5V/300mA (max. 1A Spitze) für externe Komponenten verfügbar Ansteuerung von 2 Motoren (bis 3A Dauerstrom) Auslesen eines Quadratur-Encoder-Motorgeber Drehzahl/Zählergebnisse über I2C-Register auslesbar 2 Betriebsarten: direkte Steuerung oder Vorgabe der Geschwindigkeit + Lenkinformation (open loop, closed loop) Watchdog, nach 2s ohne I2C Kommunikation wird Motor gestoppt (schaltbar) Vier I²C-Anschlüsse (einfache 4er Stifleiste) Acht I²C-Adressen über Software wählbar (Standard: 0xB0), Alternativadresse einfach über Jumper setzbar Modul fertig aufgebaut und getestet Abmessungen: 72mm x 59mm x 25mm Das Bild zeigt das Board mit angeschlossenen EMG Motoren Seite 2 von 21
 Watchdog, nach 2s ohne I2C Kommunikation wird Motor gestoppt (schaltbar) Vier")
3 Die Anschlüsse des Modules: I2C Anschluß Der I2C Anschluß ist als 4 polige Stiftleiste ausgelegt (siehe Bild). Es müssen drei Leitungen SDA, SCL und GND mit dem zu steuernden Microcontrollerboard verbunden werden. Die RN-Boards s führen diese Leitungen gewöhnlich auf einem 10 poligen Stecker. Man kann die Leitungen aber oft auch manuell leicht verdrahten, siehe das Bild auf den nächsten Seite (RN-Control und MD23). Das Motorboard bietet vier I2C Anschlüsse, diese sind parallelgeschaltet und können zur Verbindung von weiteren I2C Boards genutzt werden. Motorspannung Die Motorsteuerung ist für eine 12V Batterie bzw. 12V Akku ausgelegt. Praktisch darf die Spannung zwischen 9 und 14 Volt liegen. Achtung, Spannungen über 14 Volt zerstören das Board! Seite 3 von 21

4 Motorentstörung Es wird empfohlen Motoren durch einen 10n Kondensator zu entstören. Wenn unsere Motoren EMG30 benutzt werden ist dies nicht notwendig, da diese bereits einen 10n Kondensator eingebaut haben. Durch die Entstörung werden Beeinflussungen des Motorboardes oder des Zählvorganges (Drehzahl) verhindert. Leds Die rote LED zeigt an das die Betriebsspannung anliegt. Die grüne LED gibt bei Slave ID Änderungen die eingestellte I2C Adresse bekannt. Weiter hinten in der Doku finden sie näheres dazu. Ansonsten blinkt die grüne Led kurz auf wenn I2C Befehle empfangen werden. Automatische Geschwindigkeitsregelung Benutzt man Motoren mit Drehgeber (wie z.b. unsere EMG30) Motoren, so sorgt die eingebaute Geschwindigkeitsregelung stets für konstante Geschwindigkeit. Das bedeutet das stärker belastete Motoren (z.b. an Steigung) automatisch mit mehr Power versorgt werden. Automatischer Motorstop Wenn über 2 Sekunden keine I2C Kommunikation erfolgt, so stoppt das Motorboard aus Sicherheitsgründen automatisch beide Motoren. Über ein Register kann diese Option jedoch auch abgeschaltet werden. Steuerung des MD23 Die Steuerung erfolgt über einen Standard I2C Bus wie Ihn zum Beispiel fast jedes RN-Board (aber auch andere) besitzt. Die Standard I2C-Slave Adresse ist Hex B0. Sie läßt sich über einen Jumper oder per Software auch auf BE ändern. Seite 4 von 21

5 Register Name Read/Write Beschreibung 0 Speed1 Lesen und Schreiben Motorgeschwindigkeit Motor 1 (oder beider motoren, je nach Mode) 1 Speed2/Turn Lesen und Schreiben Motorgeschwindigkeit Motor 2 2 Enc1a Nur lesen Byte 1 Drehgeber 1 Position (höchste Byte) 3 Enc1b Nur lesen Byte2 Drehgeber 1 Position 4 Enc1c Nur lesen Byte3 Drehgeber 1 Position 5 Enc1d Nur lesen Byte4 Drehgeber 1 Position 6 Enc2a Nur lesen Byte 1 Drehgeber 2 Position (höchste Byte) 7 Enc2b Nur lesen Byte 2 Drehgeber 2 Position 8 Enc2c Nur lesen Byte 3 Drehgeber 2 Position 9 Enc2d Nur lesen Byte 4 Drehgeber 2 Position 10 Battery volts Nur lesen 11 Motor 1 current Nur lesen 12 Motor 2 current Nur lesen Batteriespannung Wert / 10 = Volt Aktueller Strom Motor 1 Wert / 10 = Ampere Aktueller Strom Motor 2 Wert / 10 = Ampere 13 Softw. Revision Nur lesen Firmware Version (Revision) 14 Acceleration rate Lesen und Schreiben Optionales Beschleunigungs Register 15 Mode Lesen und Schreiben Betriebsmodus 16 Command Lesen und Schreiben Spezielle Commandos wie Rücksetzen der Encoder-Zähler auf 0 Befehl Hex 20: Encoders auf 0 setzen Seite 5 von 21

6 Erläuterung der Register Register 0 (Speed1 Register) Je nachdem in welchem Mode sich das Board befindet, hat dieses Register unterschiedliche Aufgaben. Im Betriebsmode 0 und 1: Geschwindigkeit und Richtung von Motor 1. Je höher der Wert je schneller! Im Betriebsmode 2 und 3: Geschwindigkeit und Richtung beider Motoren Resister 1 (Speed2/Turn Register Lenkinformation) Je nachdem in welchem Mode sich das Board befindet, hat dieses Register unterschiedliche Aufgaben. Im Betriebsmode 0 und 1: Geschwindigkeit und Richtung von Motor 2. Je höher der Wert je schneller! Im Betriebsmode 2 und 3: Turn-Wert (Lenkinformation) Turn mode (Lenkregister) Der Turn-Wert legt fest wann sich ein Motor bei einem geschwindigkeitswert vorwärts oder rückwärts bewegt. So berechnet sich die Geschwindigkeit bei Vorwärtsrichtung: motor speed1 = speed - turn motor speed2 = speed + turn So berechnet sich die Geschwindigkeit bei Rückwärtsrichtung: motor speed1 = speed + turn motor speed2 = speed - turn Wenn ein Motor nicht in der Lage ist die Höchstgeschwindigkeit für die Wende zu erreichen, dann wird automatisch der zweite Motor entsprechend in der geschwindigkeit gedrosselt, so das das Verhältnis wieder stimmt. Seite 6 von 21

7 Register 2 bis 9 (die Encoder Register) Die Umrehungen des Drehgebers werden intern als Long-Wert (4 Byte) gezählt. Es müssen demnach auch alle 4 Bytes ausgelesen werden um eine 32 Bit zahl darzustellen. Man kann die Registe rauf 0 setzen indem man den Wert Hex 20 in das Command Register schreibt. Register 10 (Batteriespannung) Dieses Register gibt die Batteriespannung mit einer Nachkommastelle zurück. Der Wert 121 würde beispielsweise 12.1 Volt bedeuten. Register 11 und 12 (Motorstrom Register) Die Motorstrom Register geben den Strom in Ampere mit einer Nachkommastelle zurück. Der Wert 25 bedeutet beispielsweise 2,5 Ampere. Register 13 (Software Version /Revision) Die Versionsnummer der Firmware im Board. Zum Zeitpunkt als die Doku geschrieben wurde, war das Revision 3! Register 14 (Beschleunigungsregister) Über das Beschleunigungsregister wird festgelegt wie schnell ein Motor eine Geschwindigkeit auf eine neue Geschwindigkeitsvorgabe oder auf einen Richtungswechsel vornimmt. Der Wert kann zwischen 1 und 10 liegen. Die genaue Berechnung in Millisekunden wird in der englischen Doku näher erläutert. Hier eine Tabelle mit einigen Beispielwerten: Beschleunigungsregister Time/step Aktuelle Geschwindigkeit Neue Geschwindigkeit Schritte Beschleunigungszeit 1 18ms s 2 18ms s 3 18ms s 5 (default) 18ms s 10 18ms s Seite 7 von 21
 Die Motorstrom Register geben den Strom in Ampere mit einer Nachkommastelle zurück. Der Wert 25 bedeutet beispielsweise 2,5 Ampere.")
8 Register 15 (Mode Register) Das Mode Register legt die Betriebsart des Boards fest. Je nach Mode sind einige Register unterschiedlich zu handhaben. Die Modis: Mode 0 (Standard-Modus) : Der Geschwindigkeitswert wird wie folgt intepretiert: Rückwärtsdrehung / 128 Stop / Vorwärtsdrehung Mode 1 : Ist identisch mit mode 0, nur das hier der Geschwindigkeitswert als vorzeichenbehaftet interpretiert wird. Der Geschwindigkeitswert wird dadurch wie folgt intepretiert: -1 bis -128 Rückwärtsdrehung / 0 Stop / Vorwärtsdrehung Mode 2: In dieser Betriebsart werden beide Motoren über das Register 0 (Speed Register) in der Geschwindigkeit gesteuert. Die Lenkbewegung erfolgt für das Register 2. Der Geschwindigkeitswert wird wie folgt intepretiert: Rückwärtsdrehung / 128 Stop / Vorwärtsdrehung Mode 3: Ist identisch mit mode 2, nur das hier der Geschwindigkeitswert als vorzeichenbehaftet interpretiert wird. Der Geschwindigkeitswert wird dadurch wie folgt intepretiert: -1 bis -128 Rückwärtsdrehung / 0 Stop / Vorwärtsdrehung Seite 8 von 21

9 Register 16 (Command Register) Über das Command-Register können verschiedene entsprechende Befehlsbyte in das Register schreiben Funktionen ausgelöst werden. Einfach das Befehl Dec Hex Funktion Die Encoder (Drehgeber) werden auf 0 zurückgesetzt Die automatische Geschwindigkeitsregelung wird abgeschaltet Die automatische Geschwindigkeitsregelung wird eingeschaltet (Voreinstellung) Schaltet den automatischen 2 Sekunden I2C Timeout aus Schaltet den automatischen 2 Sekunden I2C Timeout ein (Voreinstellung) 160 A0 1 Wert zum Ändern der I2C Slave ID 170 AA 2 Wert zum Ändern der I2C Slave ID 165 A5 3 Wert zum Ändern der I2C Slave ID Seite 9 von 21
 160 A0 1 Wert zum Ändern der I2C Slave ID 170 AA 2 Wert zum Ändern der I2C Slave ID 165 A5 3 Wert zum Ändern der I2C Slave ID")
10 Ändern der I2C Slave ID Die I2C-Sve Adresse kann durch einen Jumper als auch durch schreiben einer Befehlssequenz in das Command-Register geändert werden. Um die Adresse per Command Register zu ändern, müssen folgende vier Bytes nacheinander in das Command Register geschrieben werden: A0 / AA / A5 / Neue Slave ID Um die Adresse Hex B4 hinein zu schreiben, müssten also folgende Bytes an Register 16 gesendet werden: A0 / AA / A5 / B4 Beim Einschalten des Boards wird die jeweils eingestellte I2C-Slave ID durch ein langes Blinkzeichen und mehrere kleine Blinkzeichen zurück gegeben. In der nachfolgenden Tabelle ersieht man die Bedeutung dieser Blinkzeichen. I2C Slave (Dezimal) I2C Slave (hex) Langes Blinken Kurzes Blinken 176 B B B B B BA BC BE 1 7 I2C Slave ID Jumper Man kann die i2c Adresse auch durch entfernen des Jumpers und anschließendem Neustart (Spannung kurz unterbrechen) verändern. Und zwar wird bei jedem neustart ohne Jumper automatisch die nächst höhere Adresse gewählt. Da Standard B0 ist, würde nach dem ersten Neustart B2 eingestellt. Ein weiterer Neustart (ohne Jumper) würde B4 einstellen. Sobald der Jumper wieder gesteckt wird, bleibt die I2C Slave ID auch nach Neustart unveränderlich. Seite 10 von 21

11 Beispielprogramme Auf den nachfolgenden Seiten haben wir eine Beispielprogramme bereitgestellt, welche die Steuerung des Boardes mit dem Controllerboard RN-Control zeigt. Natürlich lassen sich diese Bascom Beispiele leicht auch auf andere Controller übertragen. Die abgedruckten Beispiele als auch einige weitere sind natürlich auch auf der CD von Robotikhardware.de zu finden. Das erste Beispielprogramm demonstriert einige Grundfunktionen des Boardes. Die tasten von RN- Control werden mit folgenden Funktionen belegt: Taste 1 Taste 2 Firmware Version des Motorboards MD23 auslesen und über RS232 ausgeben und I2C Timeout abschalten (damit Motoren nicht stoppen wenn keine Befehle gesendet werden) Spannung am Motorboard MD23 messen und über RS232 ausgeben Taste 3 Motor 1 volle Geschwindigkeit Mode 0 Taste 4 Motor 2 volle Geschwindigkeit Mode 0 Taste 5 Motor 1 und 2 stoppen Seite 11 von 21

12 '############################################################## 'md23test.bas ' 'Das Programm demonstriert wie das Motorboard MD23 'über I2C von RN-Control angesteuert wird ' 'Die tasten haben in dem Demo folgende Funktion: 'Taste 1: Firmware Version des Motorboards MD23 auslesen und über RS232 ausgeben ' und I2C Timeout abschalten (damit Motoren nicht stoppen wenn keine Befehle gesendet werden) 'Taste 2: Spannung am Motorboard MD23 messen und über RS232 ausgeben 'Taste 3: Motor 1 volle Geschwindigkeit Mode 0 'Taste 4: Motor 2 volle Geschwindigkeit Mode 0 'Taste 5: Motor 1 und 2 stoppen ' 'Autor: Frank (roboternetz.de) 'Verwendet wurden: RN-Control & MD23 (robotikhardware.de) 'Weitere Beispiele sind im Roboternetz gerne willkommen! '############################################################## $programmer = 12 anderer Programmer) 'MCS USB (Zeile weglassen wenn ' RN-Control übliche Declare Function Tastenabfrage() As Byte $regfile = "m32def.dat" $framesize = 32 $swstack = 32 $hwstack = 64 $crystal = $baud = 9600 Config Scl = Portc.0 Config Sda = Portc.1 Config Adc = Single, Prescaler = Auto Spannungsmessung Config Pina.7 = Input Porta.7 = 1 Dim Taste As Byte Dim Ton As Integer 'Quarzfrequenz 'Ports fuer IIC-Bus 'Für Tastenabfrage und 'Für Tastenabfrage 'Pullup Widerstand ein I2cinit Start Adc Sound Portd.7, 400, 450 Sound Portd.7, 400, 250 'BEEP 'BEEP 'BEEP Sound Portd.7, 400, 450 Print Print "**** RN-CONTROL V1.4 *****" Print "Demoprogramm zum Motorboard MD23" Print "RN-Control als auch MD23 gibts bei robotikhardware.de" Print ' Ende RN-Control übliche Declare Function Md23_version() As Byte Declare Function Md23_batteriespannung() As Single Declare Sub Md23_writeregister(byval Register As Byte, Byval Wert As Byte) Const Md23_slaveid = &HB0 Dim S As String * 15 Dim F As Single Seite 12 von 21

13 Do Taste = Tastenabfrage() If Taste <> 0 Then Select Case Taste Case 1: Print "MD23 Firmware Version:" ; Md23_version() deaktivieren Md23_writeregister 16, &H32 'Automatische Timout Abschaltung Case 2 Case 3 F = Md23_batteriespannung() F = F / 10 Print "Die gemessene Batteriespannung beträgt:" ; F Md23_writeregister 0, 255 Case 4 Md23_writeregister 1, 255 Case 5 Md23_writeregister 0, 128 Md23_writeregister 1, 128 End Select Sound Portd.7, 400, 500 End If 'BEEP Waitms 100 Loop End ' Diese Unterfunktion fragt die Tastatur am analogen Port ab ' Sollte beim betätigen einer Taste kein Quittungston kommen, dann ' muss die die Tastenabfrage (Select Case Anweisung in Funktion ) ' an ihr Board angepaßt werden. Widerstandstoleranzen sorgen in ' Einzelfällen manchmal dafür das die Werte etwas anders ausfallen ' Am besten dann den WS wert mit Print für jede Taste ausgeben lassen Function Tastenabfrage() As Byte Local Ws As Word ' Tastenabfrage = 0 Ton = 600 Ws = Getadc(7) Print "ws= " ; Ws If Ws < 1010 Then Select Case Ws Case 400 To 455 Tastenabfrage = 1 Ton = 550 Case 335 To 380 Tastenabfrage = 2 Ton = 500 Case 250 To 305 Tastenabfrage = 3 Ton = 450 Case 180 To 220 Tastenabfrage = 4 Ton = 400 Seite 13 von 21

14 Case 100 To 130 Tastenabfrage = 5 Ton = 350 End Select Sound Portd.7, 400, Ton End If 'BEEP End Function Function Md23_version() As Byte Local Firmware As Byte Local I2cread As Byte I2cread = Md23_slaveid + 1 I2cstart I2cwbyte Md23_slaveid I2cwbyte 13 I2cstop 'Leseregister festlegen I2cstart I2cwbyte I2cread I2crbyte Firmware, Nack I2cstop Md23_version = Firmware End Function Function Md23_batteriespannung() As Single Local Spannung As Byte Local I2cread As Byte I2cread = Md23_slaveid + 1 I2cstart I2cwbyte Md23_slaveid I2cwbyte 10 I2cstop 'Leseregister festlegen I2cstart I2cwbyte I2cread I2crbyte Spannung, Nack I2cstop Md23_batteriespannung = Spannung End Function 'Schreibt in Register ein Wert Sub Md23_writeregister(byval Register As Byte, Byval Wert As Byte) I2cstart I2cwbyte Md23_slaveid I2cwbyte Register 'Leseregister festlegen I2cwbyte Wert I2cstop End Sub 'Leseregister festlegen Seite 14 von 21

15 md23drehzahl.bas Dieses Testprogramm demonstriert wie man die Drehgeberimpulse ausliest und in umdrehungen umrechnet. Wenn die Radgröße bekannt ist, kann man diesen Wert natürlich sehr einfach in eine Wegstrecke umrechnen. Die Tasten im Demo sind wie folgt belegt: Taste 1 Taste 2 Motor 1 stoppen Motor 1 kleinere Geschwindigkeit Taste 3 Motor 1 volle Geschwindigkeit Mode 0 Taste 4 Taste 5 Ausgabe der Impulsanzahl über RS232 (Drehgeber) und Umdrehungen Zähler für Impulse auf 0 setzen '############################################################## 'md23drehzahl.bas ' 'Das Programm demonstriert wie das Motorboard MD23 'über I2C von RN-Control angesteuert wird ' 'Die Tasten haben in dem Demo folgende Funktion: 'Taste 1: Motor 1 stoppen 'Taste 2: Motor 1 kleinere Geschwindigkeit 'Taste 3: Motor 1 volle Geschwindigkeit Mode 0 'Taste 4: Ausgabe der Impulsanzahl über RS232 (Drehgeber) und Umdrehungen 'Taste 5: Zähler für Impulse auf 0 setzen ' 'Autor: Frank (roboternetz.de) 'Verwendet wurden: RN-Control & MD23 (robotikhardware.de) 'Weitere Beispiele sind im Roboternetz gerne willkommen! '############################################################## $programmer = 12 'MCS USB (Zeile weglassen wenn anderer Programmer) ' RN-Control übliche Declare Function Tastenabfrage() As Byte $regfile = "m32def.dat" $framesize = 32 $swstack = 32 $hwstack = 64 $crystal = $baud = 9600 Config Scl = Portc.0 Config Sda = Portc.1 Config Adc = Single, Prescaler = Auto Spannungsmessung Config Pina.7 = Input Porta.7 = 1 Dim Taste As Byte Dim Ton As Integer 'Quarzfrequenz 'Ports fuer IIC-Bus 'Für Tastenabfrage und 'Für Tastenabfrage 'Pullup Widerstand ein Seite 15 von 21
 und Umdrehungen Zähler für Impulse auf 0 setzen '############################################################## 'md23drehzahl.")
16 I2cinit Start Adc Sound Portd.7, 400, 450 Sound Portd.7, 400, 250 'BEEP 'BEEP 'BEEP Sound Portd.7, 400, 450 Print Print "**** RN-CONTROL V1.4 *****" Print "Demoprogramm zum Motorboard MD23" Print "RN-Control als auch MD23 gibts bei robotikhardware.de" Print ' Ende RN-Control übliche Declare Sub Md23_writeregister(byval Register As Byte, Byval Wert As Byte) Declare Function Md23_impulse(byval Motor As Byte) As Long Const Md23_slaveid = &HB0 Dim Umdrehungen As Long Dim Zaehler As Long Wait 1 Md23_writeregister 16, &H32 'Automatische Timout Abschaltung deaktivieren Md23_writeregister 15, &H0 'Mode 0 Print "Automatische Timout Abschaltung deaktiviert" Do Taste = Tastenabfrage() If Taste <> 0 Then Select Case Taste Case 1: Md23_writeregister 0, 128 Case 2 Case 3 Case 4 Md23_writeregister 0, 170 Md23_writeregister 0, 255 Zaehler = Md23_impulse(1) Umdrehungen = Zaehler / 360 Print "Impulse: " ; Zaehler ; " Umdrehungen: " ; Umdrehungen Case 5 Md23_writeregister 16, &H20 'Zähler auf 0 setzen End Select Sound Portd.7, 400, 500 End If 'BEEP Waitms 100 Loop End ' Diese Unterfunktion fragt die Tastatur am analogen Port ab ' Sollte beim betätigen einer Taste kein Quittungston kommen, dann ' muss die die Tastenabfrage (Select Case Anweisung in Funktion ) ' an ihr Board angepaßt werden. Widerstandstoleranzen sorgen in ' Einzelfällen manchmal dafür das die Werte etwas anders ausfallen ' Am besten dann den WS wert mit Print für jede Taste ausgeben lassen Function Tastenabfrage() As Byte Seite 16 von 21

17 Local Ws As Word ' Tastenabfrage = 0 Ton = 600 Ws = Getadc(7) Print "ws= " ; Ws If Ws < 1010 Then Select Case Ws Case 400 To 455 Tastenabfrage = 1 Ton = 550 Case 335 To 380 Tastenabfrage = 2 Ton = 500 Case 250 To 305 Tastenabfrage = 3 Ton = 450 Case 180 To 220 Tastenabfrage = 4 Ton = 400 Case 100 To 130 Tastenabfrage = 5 Ton = 350 End Select Sound Portd.7, 400, Ton End If 'BEEP End Function 'Schreibt in Register ein Wert Sub Md23_writeregister(byval Register As Byte, Byval Wert As Byte) I2cstart I2cwbyte Md23_slaveid I2cwbyte Register 'Leseregister festlegen I2cwbyte Wert I2cstop End Sub 'Leseregister festlegen Function Md23_impulse(byval Motor As Byte) As Long Local W1 As Byte Local W2 As Byte Local W3 As Byte Local W4 As Byte Local Impulse As Long Local I2cread As Byte I2cread = Md23_slaveid + 1 If Motor = 1 Then I2cstart I2cwbyte Md23_slaveid I2cwbyte 2 I2cstop Else I2cstart I2cwbyte Md23_slaveid I2cwbyte 6 I2cstop End If 'Leseregister festlegen 'Leseregister festlegen I2cstart I2cwbyte I2cread I2crbyte W1, Ack I2crbyte W2, Ack Seite 17 von 21
 As Long Local W1 As Byte Local W2 As Byte Local W3 As Byte Local W4 As Byte Local Impulse As")
18 I2crbyte W3, Ack I2crbyte W4, Nack I2cstop Impulse = 0 Impulse = Impulse Or W1 Shift Impulse, Left, 8 Impulse = Impulse Or W2 Shift Impulse, Left, 8 Impulse = Impulse Or W3 Shift Impulse, Left, 8 Impulse = Impulse Or W4 Md23_impulse = Impulse End Function Weitere Beispielprogramme auf der CD von Robotikhardware.de. Die CD liegt jeder Boardbestellung bei! Seite 18 von 21

19 Schaltplan Seite 19 von 21

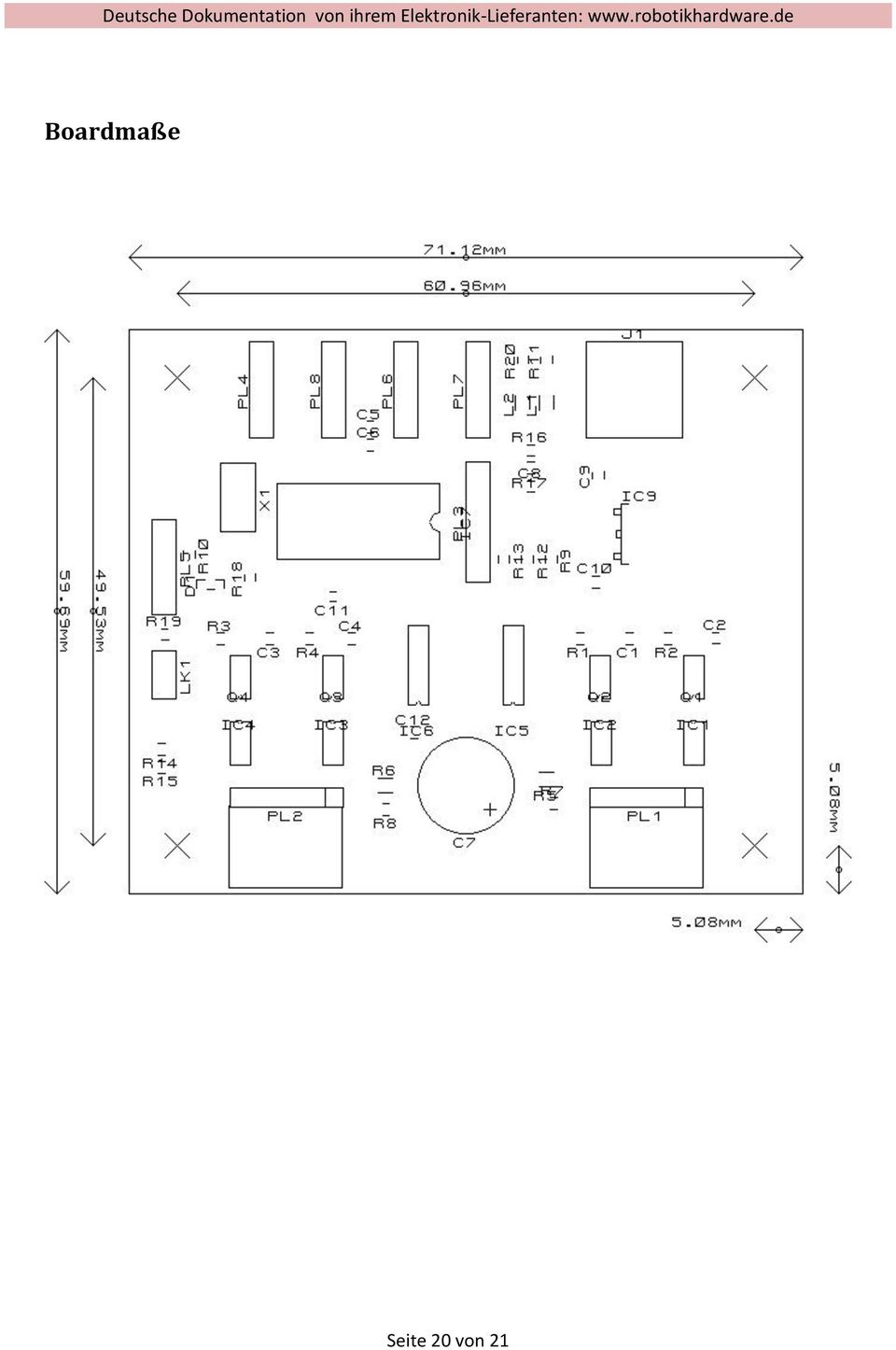
20 Boardmaße Seite 20 von 21
21 MD23 Hersteller: Devantech Ltd, England Bezugsquelle Germany: Bei uns mit CD und Bascom Beispielprogrammen Aktuellen Link zu einer englischen Original-Dokumentation findet man im Shop von bei der jeweiligen Artikelbeschreibung! Hinweise zur beschränkten Haftung Das Modul ist nicht für Geräte geeignet die direkt oder indirekt medizinischen, gesundheitlichen oder anderen Zwecken, bei denen ein Ausfall / Fehler zu Schäden an Personden oder Sachwerten führen würde. Soll das Modul für einen solchen Fall eingesetzt werden, so ist der Kunde für den test und alle Zulassungen selbst verantwortlich. Robotikhardware.de übernimmt darfür keinerlei Haftung. Die Haftung beschränkt sich in allen Fällen auf den Austausch des fehlerhaften Moduls. Module die durch fehlerhaften Anschluß / Bedienung beschädigt wurden, können nicht ersetzt werden. Seite 21 von 21
3 Achsen Accelerometer
 Datenblatt und Doku zu 3 Achsen Accelerometer Beschleunigungssensor Typ (MMA7260QT) Dieser 3 Achsen Sensor misst Beschleunigungen, Neigungen bzw. Bewegungen in alle Richtungen. Der ermittelten werde werden
Datenblatt und Doku zu 3 Achsen Accelerometer Beschleunigungssensor Typ (MMA7260QT) Dieser 3 Achsen Sensor misst Beschleunigungen, Neigungen bzw. Bewegungen in alle Richtungen. Der ermittelten werde werden
Miniatur Motortreiber TB6612FNG
 Datenblatt und Doku zu Miniatur Motortreiber TB6612FNG Motortreiber für zwei Motoren (max. 2 mal 3 Ampere) Der ideale Motortreiber für alle Projekte wo es auf Platz oder Gewicht an kommt. Auf einer daumengroßen
Datenblatt und Doku zu Miniatur Motortreiber TB6612FNG Motortreiber für zwei Motoren (max. 2 mal 3 Ampere) Der ideale Motortreiber für alle Projekte wo es auf Platz oder Gewicht an kommt. Auf einer daumengroßen
AVR-Mikrocontroller in BASCOM programmieren
 jean-claude.feltes@education.lu 1 AVR-Mikrocontroller in BASCOM programmieren Der IC-Bus (TWI-Interface) Allgemeines Spezifikationen des IC-Busses: http://www.nxp.com/acrobat_download/literature/9398/39311.pdf
jean-claude.feltes@education.lu 1 AVR-Mikrocontroller in BASCOM programmieren Der IC-Bus (TWI-Interface) Allgemeines Spezifikationen des IC-Busses: http://www.nxp.com/acrobat_download/literature/9398/39311.pdf
Geschrieben von: Malte Freitag, den 16. Juli 2010 um 21:28 Uhr - Aktualisiert Montag, den 05. Dezember 2011 um 18:09 Uhr
 {jcomments on} Bei ELV gibt es seit einiger Zeit ein 3-Achsen Beschleunigungssensormodul basierend auf dem BMA020 von Bosch Sensortec. Der MEMS -Sensor verfügt über drei wählbare Messbereiche von +/-2,
{jcomments on} Bei ELV gibt es seit einiger Zeit ein 3-Achsen Beschleunigungssensormodul basierend auf dem BMA020 von Bosch Sensortec. Der MEMS -Sensor verfügt über drei wählbare Messbereiche von +/-2,
RN-LCD-Adapter - STD. Doku vom (stets aktuelle Dokumentation verwenden)
") RN-LCD-Adapter - STD RN-LCD-Adapter STD ist ein weiterer sehr nützlicher Adapter zum einfachen anschließen von Standard LCD s an gängige Controllerboards. Es gibt einen ähnlichen Adapter bereits für die
RN-LCD-Adapter - STD RN-LCD-Adapter STD ist ein weiterer sehr nützlicher Adapter zum einfachen anschließen von Standard LCD s an gängige Controllerboards. Es gibt einen ähnlichen Adapter bereits für die
Die Digitalanzeige für ControllerBoards
 Die Digitalanzeige für ControllerBoards Einfache Ansteuerung per I2C RN-DIGI Version 1.1 + 1.2 Dieses Board wurde als Erweiterung zu den Roboternetz-Controllerboards (RNBFRA und RN-Control) entworfen,
Die Digitalanzeige für ControllerBoards Einfache Ansteuerung per I2C RN-DIGI Version 1.1 + 1.2 Dieses Board wurde als Erweiterung zu den Roboternetz-Controllerboards (RNBFRA und RN-Control) entworfen,
High-Power Motortreiber 18V15
 Datenblatt und Doku zu High-Power Motortreiber 18V15 Ohne Kühlkörper max. 15 Ampere und 18 (30) Volt möglich! Der neue Motortreiber vereinigt nicht nur winzige Maße (20x33mm) sondern auch kraftvolle Leistung.
Datenblatt und Doku zu High-Power Motortreiber 18V15 Ohne Kühlkörper max. 15 Ampere und 18 (30) Volt möglich! Der neue Motortreiber vereinigt nicht nur winzige Maße (20x33mm) sondern auch kraftvolle Leistung.
Daten loggen mit der STI100-Platine
 Will man größere Datenmengen loggen, reicht das EEPROM des Attiny nicht aus. Hier kann die Platine STI 100 von ELV (Artikel-Nr.: 68-07 59 50) helfen: Mit ihrer Hilfe können nämlich Daten vom Mikrocontroller
Will man größere Datenmengen loggen, reicht das EEPROM des Attiny nicht aus. Hier kann die Platine STI 100 von ELV (Artikel-Nr.: 68-07 59 50) helfen: Mit ihrer Hilfe können nämlich Daten vom Mikrocontroller
Ruecklicht-V1 von Peter Krueger /
 Ruecklicht-V1 von / 20.06.2014 Original-Version: Fahrrad-Rücklicht mit Reaktiv-Modus, von Martin Müller 09.04.2012. Überarbeitet / Korrektur: Ruecklicht-V1.bas /, 20.06.2014 Zum Download: Rucklicht-V1.bas
Ruecklicht-V1 von / 20.06.2014 Original-Version: Fahrrad-Rücklicht mit Reaktiv-Modus, von Martin Müller 09.04.2012. Überarbeitet / Korrektur: Ruecklicht-V1.bas /, 20.06.2014 Zum Download: Rucklicht-V1.bas
Der Magnetfeldsensor HMC5883L
 Unter der Bezeichnung GY-273 wird ein preiswertes Modul (Preis unter 2 Euro) angeboten, mit dem Magnetfelder gemessen werden können. Herzstück dieses Moduls ist der Baustein HMC5883L. Hierbei handelt es
Unter der Bezeichnung GY-273 wird ein preiswertes Modul (Preis unter 2 Euro) angeboten, mit dem Magnetfelder gemessen werden können. Herzstück dieses Moduls ist der Baustein HMC5883L. Hierbei handelt es
Nachtaktiver Blinker. Ralf Pongratz. 11. November 2012
 www.reaktivlicht.de Ralf Pongratz Nachtaktiver Blinker Als Bausatz erhältlich auf www.reaktivlicht.de Nachtaktiver Blinker Ralf Pongratz 11. November 2012 Inhaltsverzeichnis I. Die Schaltung 2 1. Funktionsbeschreibung
www.reaktivlicht.de Ralf Pongratz Nachtaktiver Blinker Als Bausatz erhältlich auf www.reaktivlicht.de Nachtaktiver Blinker Ralf Pongratz 11. November 2012 Inhaltsverzeichnis I. Die Schaltung 2 1. Funktionsbeschreibung
USB-Isolator. Version 1.2. (C) R.Greinert 2009
 R.Greinert 2009") USB-Isolator Version 1.2 (C) R.Greinert 2009 Bestückung der Unterseite: 7 x Kondensator 100nF 4 x Widerstand 3300 Ohm 3 x Widerstand 1600 Ohm 4 x Widerstand 24 Ohm 1 x IC ADuM4160 [ braun/beige ] [ 332
USB-Isolator Version 1.2 (C) R.Greinert 2009 Bestückung der Unterseite: 7 x Kondensator 100nF 4 x Widerstand 3300 Ohm 3 x Widerstand 1600 Ohm 4 x Widerstand 24 Ohm 1 x IC ADuM4160 [ braun/beige ] [ 332
Die Software zum Unser kleiner Computer
 Die Software zum Unser kleiner Computer '-------------------------------------------------------------------------------- 'name : computer.bas 'copyright : (c)bernd Grupe, DF8ZR 'micro : Mega8 ' Das Programm
Die Software zum Unser kleiner Computer '-------------------------------------------------------------------------------- 'name : computer.bas 'copyright : (c)bernd Grupe, DF8ZR 'micro : Mega8 ' Das Programm
Stefan Hoffmann. Leichter Start mit BASCOM und myavr
 Leichter Start mit BASCOM und myavr Entwicklungsumgebung für AVR Mikrocontroller Seite: 3/15 1 Entwicklungsumgebung für AVR Mikrocontroller Für die Arbeit mit BASCOM und myavr-produkten benötigt man einen
Leichter Start mit BASCOM und myavr Entwicklungsumgebung für AVR Mikrocontroller Seite: 3/15 1 Entwicklungsumgebung für AVR Mikrocontroller Für die Arbeit mit BASCOM und myavr-produkten benötigt man einen
AVR-Mikrocontroller in BASCOM programmieren, Teil 2
 jean-claude.feltes@education.lu 1 AVR-Mikrocontroller in BASCOM programmieren, Teil 2 13. Interrupts 13.1 Externe Interrupts durch Taster Wenn Taster mittels Polling abgefragt werden, wie in Teil 1 beschrieben,
jean-claude.feltes@education.lu 1 AVR-Mikrocontroller in BASCOM programmieren, Teil 2 13. Interrupts 13.1 Externe Interrupts durch Taster Wenn Taster mittels Polling abgefragt werden, wie in Teil 1 beschrieben,
USB > I2C- Bus Modul. Startet den I2C-Bus. Daten einlesen NACK senden
 USB > I2C- Bus Modul Info Das USB > I2C-Bus Modul stellt eine Verbindung zwischen einen PC und dem I2C-Bus her. Über ein Terminal Programm können nun Daten zum I2C-Bus gesendet und vom I2C-Bus empfangen
USB > I2C- Bus Modul Info Das USB > I2C-Bus Modul stellt eine Verbindung zwischen einen PC und dem I2C-Bus her. Über ein Terminal Programm können nun Daten zum I2C-Bus gesendet und vom I2C-Bus empfangen
Die Joypad s lassen sich wegen der Befestigungslöcher auf der Platine auch gut in Gehäuse integrieren.
 RN-JOYPAD Ein ideales Steuerboard für alles was in verschiedene Richtungen gesteuert werden muss. Das Board stellt 2 analoge JoyPads zur Verfügung, welche in alle Richtungen bewegt werden können. Über
RN-JOYPAD Ein ideales Steuerboard für alles was in verschiedene Richtungen gesteuert werden muss. Das Board stellt 2 analoge JoyPads zur Verfügung, welche in alle Richtungen bewegt werden können. Über
SIOSLAB. Technische Daten:
 SIOSLAB Das SIOSLAB ist ein universelles PC-Interface mit 8 digitalen Ein- und Ausgängen, 2 analogen Eingängen sowie wahlweise mit 2 PWM-Ausgängen. Der Anschluss erfolgt über die serielle Schnittstelle
SIOSLAB Das SIOSLAB ist ein universelles PC-Interface mit 8 digitalen Ein- und Ausgängen, 2 analogen Eingängen sowie wahlweise mit 2 PWM-Ausgängen. Der Anschluss erfolgt über die serielle Schnittstelle
Temperaturmessung mit dem ATmega8
 Temperaturmessung mit dem ATmega8 Messaufbau: Der ADC des ATmega8 stellt uns 6 Kanäle zur Analog/Digital Wandlung zur Verfügung und wird mit der internen Spannungsquelle bzw. externen Spannungsquelle betrieben.
Temperaturmessung mit dem ATmega8 Messaufbau: Der ADC des ATmega8 stellt uns 6 Kanäle zur Analog/Digital Wandlung zur Verfügung und wird mit der internen Spannungsquelle bzw. externen Spannungsquelle betrieben.
RalfPongratz. Grundversion. Reaktivlichtmit7SegmentAnzeige
 www.reaktivlicht.de RalfPongratz 7Segment Grundversion Reaktivlichtmit7SegmentAnzeige AuchalsBausatzerhältlichauf www.reaktivlicht.de Grundversion Reaktivlicht mit 7 Segment Anzeige Ralf Pongratz 13. September
www.reaktivlicht.de RalfPongratz 7Segment Grundversion Reaktivlichtmit7SegmentAnzeige AuchalsBausatzerhältlichauf www.reaktivlicht.de Grundversion Reaktivlicht mit 7 Segment Anzeige Ralf Pongratz 13. September
Die I2C Relaisplatine RNREL 1.0
 Die I2C Relaisplatine RNREL 1.0 Immer wieder kommt es vor das verbraucher (Motoren, Leuchte, Staubsauger usw.) von einem Controller aktiviert werden müssen. Da der Strom der ControllerboardAusgänge dafür
Die I2C Relaisplatine RNREL 1.0 Immer wieder kommt es vor das verbraucher (Motoren, Leuchte, Staubsauger usw.) von einem Controller aktiviert werden müssen. Da der Strom der ControllerboardAusgänge dafür
Forth-Vokabular. Vokabular für Attiny2313-Forth Stand: A: Assembler-Wort F: Forth-Wort C: Compiler-Wort
 Vokabular für Attiny2313-Forth - 1 - Forth.voc Forth-Vokabular Stand: 01.11.2012 A: Assembler-Wort F: Forth-Wort C: Compiler-Wort. A gibt TOS auf Port B aus; (Datenrichtungsbits von Port B werden alle
Vokabular für Attiny2313-Forth - 1 - Forth.voc Forth-Vokabular Stand: 01.11.2012 A: Assembler-Wort F: Forth-Wort C: Compiler-Wort. A gibt TOS auf Port B aus; (Datenrichtungsbits von Port B werden alle
Inhalt. I 2 C-433 MHz Funksender Beschreibung der Kommandos Version 1.2
 Inhalt 1. Allgemein... 2 1.1. Hardware... 2 1.1.1. I2C-Adresse Jumper... 3 1.1.2. Protokollwahlschalter SW1... 3 1.1.3. RS232-Update Schnittstelle... 4 1.1.4. Firmware Update... 4 2. übertragung... 5 2.1.
Inhalt 1. Allgemein... 2 1.1. Hardware... 2 1.1.1. I2C-Adresse Jumper... 3 1.1.2. Protokollwahlschalter SW1... 3 1.1.3. RS232-Update Schnittstelle... 4 1.1.4. Firmware Update... 4 2. übertragung... 5 2.1.
Servo-Modul Version
 Servo-Modul Version 1.0 24.06.2010 Mit dem Servo-Modul ist es möglich bis zu 8 Modellbau-Servos (analoges Signal) an zu steuern. Die Ansteuerung kann wahlweise über den I2C-Bus, einen COM-Port (RS232)
Servo-Modul Version 1.0 24.06.2010 Mit dem Servo-Modul ist es möglich bis zu 8 Modellbau-Servos (analoges Signal) an zu steuern. Die Ansteuerung kann wahlweise über den I2C-Bus, einen COM-Port (RS232)
Für schnelle und bequeme Entwicklungen wird gern Basic eingesetzt.
 2 Bascom-Start 21 Für schnelle und bequeme Entwicklungen wird gern Basic eingesetzt. Speziell für die AVR-Familie hat sich BASCOM-AVR von MCS-Electronics aus den Niederlanden weitgehend durchgesetzt. Auf
2 Bascom-Start 21 Für schnelle und bequeme Entwicklungen wird gern Basic eingesetzt. Speziell für die AVR-Familie hat sich BASCOM-AVR von MCS-Electronics aus den Niederlanden weitgehend durchgesetzt. Auf
Vielleicht weil das Beschleunigungssensor- Modul von ELV so ein Verkaufsschlager war, hat
 Vielleicht weil das Beschleunigungssensor- Modul von ELV so ein Verkaufsschlager war, hat Pollin seit kurzem ein günstiges Magnetsensor-Modul namens HDMM01 im Angebot, das sich als elektronischer Kompass
Vielleicht weil das Beschleunigungssensor- Modul von ELV so ein Verkaufsschlager war, hat Pollin seit kurzem ein günstiges Magnetsensor-Modul namens HDMM01 im Angebot, das sich als elektronischer Kompass
Config Lcdpin = Pin, Db4 = Portc.0, Db5 = Portc.1, Db6 = Portc.2, Db7 = Portc.3, E = Portc.5, Rs = Portc.4 Config Lcd = 20 * 4
 'DDS-Generator - AD9851 - AD8321 '--------------------------------------------------- ' es fehlt noch: Sweep-Modus, Offsets für S/E, Bands, Menü, RIT, LSB/USB 'MCUSR = &H80 besser für M32: JTAG über Fusebit
'DDS-Generator - AD9851 - AD8321 '--------------------------------------------------- ' es fehlt noch: Sweep-Modus, Offsets für S/E, Bands, Menü, RIT, LSB/USB 'MCUSR = &H80 besser für M32: JTAG über Fusebit
I2C-006 DATASHEET I2C-006 V1.00: 1K EEPROM MODUL MIT TWI (I 2 C) SCHNITTSTELLE. Dokument NR.: I2C-006_Datasheet
 SCHNITTSTELLE. Dokument NR.: I2C-006_Datasheet") I2C-006 DATASHEET Dokument NR.: I2C-006_Datasheet I2C-006 V1.00: 1K EEPROM MODUL MIT TWI (I 2 C) SCHNITTSTELLE P Bitte denken Sie an die Umwelt, bevor Sie diese Datei ausdrucken Modification History: Version
I2C-006 DATASHEET Dokument NR.: I2C-006_Datasheet I2C-006 V1.00: 1K EEPROM MODUL MIT TWI (I 2 C) SCHNITTSTELLE P Bitte denken Sie an die Umwelt, bevor Sie diese Datei ausdrucken Modification History: Version
150 ma (bei eingeschalteter Hintergrundbeleuchtung)
") myavr Technische Beschreibung myavr LCD Add-On 2.2 Eigenschaften 16x2 LC-Display mit Hintergrundbeleuchtung Industriestandard-Controller Kontrastregler Jumper für das Schalten der Hintergrundbeleuchtung
myavr Technische Beschreibung myavr LCD Add-On 2.2 Eigenschaften 16x2 LC-Display mit Hintergrundbeleuchtung Industriestandard-Controller Kontrastregler Jumper für das Schalten der Hintergrundbeleuchtung
Der I²C-Bus. Vorstellung des Inter-Integrated Circuit -Bus. Aufbau und Funktionsweise. Beispiel PortExpander am Arduino
 Der I²C-Bus Vorstellung des Inter-Integrated Circuit -Bus Aufbau und Funktionsweise Beispiel PortExpander am Arduino Weitere Anwendungsmöglichkeiten Was ist der I²C-Bus entwickelt von Philips Anfang der
Der I²C-Bus Vorstellung des Inter-Integrated Circuit -Bus Aufbau und Funktionsweise Beispiel PortExpander am Arduino Weitere Anwendungsmöglichkeiten Was ist der I²C-Bus entwickelt von Philips Anfang der
Stefan Schröder Hard- und Softwareentwicklungen. Steuerung für GPRS-Module und elektronische Sicherung. Zum Neetzekanal Brietlingen
 Stefan Schröder Hard- und Softwareentwicklungen Steuerung für GPRS-Module und elektronische Sicherung Stefan Schröder Hard- und Softwareentwicklungen Zum Neetzekanal 19 21382 Brietlingen e-mail: schroeder@sshus.de
Stefan Schröder Hard- und Softwareentwicklungen Steuerung für GPRS-Module und elektronische Sicherung Stefan Schröder Hard- und Softwareentwicklungen Zum Neetzekanal 19 21382 Brietlingen e-mail: schroeder@sshus.de
1. Allgemein Technische Daten... 2
 Inhalt 1. Allgemein... 2 2. Technische Daten... 2 3. Beschreibung der s... 3 3.1. Allgemein... 3 3.2. Aufbau einer Übertragung... 3 3.2.1. Nur Daten... 3 3.2.2. s und Daten:... 3 3.2.3. s und Daten gemischt:...
Inhalt 1. Allgemein... 2 2. Technische Daten... 2 3. Beschreibung der s... 3 3.1. Allgemein... 3 3.2. Aufbau einer Übertragung... 3 3.2.1. Nur Daten... 3 3.2.2. s und Daten:... 3 3.2.3. s und Daten gemischt:...
Entwicklungsboard 16F1824
 Entwicklungsboard 16F1824 Inhaltsverzeichnis 1. Einleitung...2 2. Grundlegende Eigenschaften...2 2.1 Grundlegende Eigenschaften...2 2.2 Optionale Eigenschaften...3 3. Programmierung...3 4. Hardware...5
Entwicklungsboard 16F1824 Inhaltsverzeichnis 1. Einleitung...2 2. Grundlegende Eigenschaften...2 2.1 Grundlegende Eigenschaften...2 2.2 Optionale Eigenschaften...3 3. Programmierung...3 4. Hardware...5
CAN 2.0A/B <=> RS232. Konverter mit Galvanischetrennung. CAN-Seitig: 10 Kbps.. 1,0 Mbps RS-Seitig: 1200 bps.. 1,0 Mbps. ASCII Befehle V1.
 CAN 2.0A/B RS232 Konverter mit Galvanischetrennung CAN-Seitig: 10 Kbps.. 1,0 Mbps RS-Seitig: 1200 bps.. 1,0 Mbps ASCII Befehle V1.6 1205 07:59:20 24.01.06 4n-gx-can-rs232-commands-v1.6.sxw 1/8 4N-GALAXY.DE
CAN 2.0A/B RS232 Konverter mit Galvanischetrennung CAN-Seitig: 10 Kbps.. 1,0 Mbps RS-Seitig: 1200 bps.. 1,0 Mbps ASCII Befehle V1.6 1205 07:59:20 24.01.06 4n-gx-can-rs232-commands-v1.6.sxw 1/8 4N-GALAXY.DE
Dokumentation Raspberry USV+ E
 Dokumentation Raspberry USV+ E-002-4865 Seite 1 von 13 Inhaltsverzeichnis I Einführung 03 1 Funktion 04 2 Technische Informationen 05 2.1 Anschlussplan 05 2.2 Akku 06 II Installation 07 3 Hardware 08 3.1
Dokumentation Raspberry USV+ E-002-4865 Seite 1 von 13 Inhaltsverzeichnis I Einführung 03 1 Funktion 04 2 Technische Informationen 05 2.1 Anschlussplan 05 2.2 Akku 06 II Installation 07 3 Hardware 08 3.1
LEGO MINDSTORMS NXT MIT LABVIEW 2009 PROGRAMMIEREN
 LEGO MINDSTORMS NXT MIT LABVIEW 2009 PROGRAMMIEREN Prof. Dr.-Ing. Dahlkemper Fabian Schwartau Patrick Voigt 1 NXT DIRECT COMMANDS Es gibt zwei verschiedene Möglichkeiten, den NXT zu programmieren: Es werden
LEGO MINDSTORMS NXT MIT LABVIEW 2009 PROGRAMMIEREN Prof. Dr.-Ing. Dahlkemper Fabian Schwartau Patrick Voigt 1 NXT DIRECT COMMANDS Es gibt zwei verschiedene Möglichkeiten, den NXT zu programmieren: Es werden
RS485-Relaiskarte v1.0
 RS485-Relaiskarte v1.0 Infos / technische Daten * 8x Relais mit 7A/240VAC (1x Umschalter) * Relais Anschluss über Federklemmen (kein Werkzeug notwendig) * 8x LEDs zur Anzeige der Relais Schaltzustände
RS485-Relaiskarte v1.0 Infos / technische Daten * 8x Relais mit 7A/240VAC (1x Umschalter) * Relais Anschluss über Federklemmen (kein Werkzeug notwendig) * 8x LEDs zur Anzeige der Relais Schaltzustände
Bisher hatten immer nur als Ausgänge geschaltet und hierfür folgende Befehle benutzt:
 Tasten abfragen Bisher hatten immer nur als Ausgänge geschaltet und hierfür folgende Befehle benutzt: pinmode(pinnummer, OUTPUT) digitalwrite(pinnummer, HIGH) oder digitalwrite(pinnummer, LOW) Zum Abfragen
Tasten abfragen Bisher hatten immer nur als Ausgänge geschaltet und hierfür folgende Befehle benutzt: pinmode(pinnummer, OUTPUT) digitalwrite(pinnummer, HIGH) oder digitalwrite(pinnummer, LOW) Zum Abfragen
TCP/IP ASCII Schnittstelle Programmierhandbuch
 TCP/IP ASCII Schnittstelle Programmierhandbuch Version 3.0 1. Einleitung Das IRTrans ASCII Format dient der Ansteuerung von IRTrans Modulen (über den irserver oder Ethernetmodule mit IRDB bzw. LAN Controller
TCP/IP ASCII Schnittstelle Programmierhandbuch Version 3.0 1. Einleitung Das IRTrans ASCII Format dient der Ansteuerung von IRTrans Modulen (über den irserver oder Ethernetmodule mit IRDB bzw. LAN Controller
ATXMega128/192/256a3- Controllerboard
 RIBU ELEKTRONIK VERSAND Mühlenweg 6. 8160 Preding. Tel. 03172/64800. Fax 03172/64806 e-mail:office1@ribu.at. Internet: http://www.ribu.at ATXMega128/192/256a3- Controllerboard nur 46 x 36 mm groß mit Stiftleisten
RIBU ELEKTRONIK VERSAND Mühlenweg 6. 8160 Preding. Tel. 03172/64800. Fax 03172/64806 e-mail:office1@ribu.at. Internet: http://www.ribu.at ATXMega128/192/256a3- Controllerboard nur 46 x 36 mm groß mit Stiftleisten
ATXMega32a4-Controllerboard
 RIBU ELEKTRONIK VERSAND Mühlenweg 6. 8160 Preding. Tel. 03172/64800. Fax 03172/64806 e-mail: office1@ribu.at. Internet: http://www.ribu.at ATXMega32a4-Controllerboard nur 51 x 23 mm groß mit Stiftleisten
RIBU ELEKTRONIK VERSAND Mühlenweg 6. 8160 Preding. Tel. 03172/64800. Fax 03172/64806 e-mail: office1@ribu.at. Internet: http://www.ribu.at ATXMega32a4-Controllerboard nur 51 x 23 mm groß mit Stiftleisten
RN-KeyLCD Version 1.2
 einfache Ansteuerung / sehr flexibel RN-KeyLCD Version 1.2 Ein kompaktes universelles LCD und Tastaturboard mit diversen Schnittstellen. Ein LCD und eine Tastatur ist fast bei allen Mikrocontroller-Anwendungen,
einfache Ansteuerung / sehr flexibel RN-KeyLCD Version 1.2 Ein kompaktes universelles LCD und Tastaturboard mit diversen Schnittstellen. Ein LCD und eine Tastatur ist fast bei allen Mikrocontroller-Anwendungen,
SRF10 Ultraschall Entfernungsmesser
 SRF10 Ultraschall Entfernungsmesser Dokumentation in Deutsch und Englisch Ein hochwertiges Ultraschallmodul zum messen von Entfernungen. Speziell für den RobotikBereich entwickelt, jedoch auch für zahlreiche
SRF10 Ultraschall Entfernungsmesser Dokumentation in Deutsch und Englisch Ein hochwertiges Ultraschallmodul zum messen von Entfernungen. Speziell für den RobotikBereich entwickelt, jedoch auch für zahlreiche
Das Attiny-Projekt Der I 2 C-Bus 1. Der I 2 C-Bus
 Das Attiny-Projekt Der I 2 C-Bus 1 Der I 2 C-Bus 1. Allgemeines Das I 2 C-Bus-System dient zum Aufbau und Betrieb von Geräten, für die die Anzahl der Steuerleitungen oder deren Belastbarkeit nicht ausreichen.
Das Attiny-Projekt Der I 2 C-Bus 1 Der I 2 C-Bus 1. Allgemeines Das I 2 C-Bus-System dient zum Aufbau und Betrieb von Geräten, für die die Anzahl der Steuerleitungen oder deren Belastbarkeit nicht ausreichen.
Rauschgenerator mit AVR
 FELJC@LTAM 1/8 Rauschgenerator mit AVR Für Untersuchungen im Audiobereich benötigte ich einen Rauschgenerator. Ein Versuch mit der klassischen Lösung: Rauschende Z-Diode / Transistor viel nicht überzeugend
FELJC@LTAM 1/8 Rauschgenerator mit AVR Für Untersuchungen im Audiobereich benötigte ich einen Rauschgenerator. Ein Versuch mit der klassischen Lösung: Rauschende Z-Diode / Transistor viel nicht überzeugend
Mit dieser kleinen Adapter-Platine können HD44780 kompatible LCD-Displays am I2C-Bus betrieben werden.
 I2C-Bus Display Mit dieser kleinen Adapter-Platine können HD44780 kompatible LCD-Displays am I2C-Bus betrieben werden. Infos/Übersicht * Die Spannungsversorgung kommt vom I2C-Bus (kein zusätzliches Netzteil
I2C-Bus Display Mit dieser kleinen Adapter-Platine können HD44780 kompatible LCD-Displays am I2C-Bus betrieben werden. Infos/Übersicht * Die Spannungsversorgung kommt vom I2C-Bus (kein zusätzliches Netzteil
Bedienungsanleitung Vierfach-Bluetooth Relais PL0051
 Seite 1 von 9 Bedienungsanleitung Vierfach-Bluetooth Relais Inhaltsverzeichnis 1. Einleitung...2 2. Eigenschaften...3 2.1 Grundlegende Eigenschaften...3 2.2 Optionale Eigenschaften...3 3. Bedienung...3
Seite 1 von 9 Bedienungsanleitung Vierfach-Bluetooth Relais Inhaltsverzeichnis 1. Einleitung...2 2. Eigenschaften...3 2.1 Grundlegende Eigenschaften...3 2.2 Optionale Eigenschaften...3 3. Bedienung...3
edip320-i2c/com-board (Art.#1045)
") Betriebsspannung (1045-1 & -2): +5V Betriebsspannung (1045-3 & -4): +9 bis18v Abmessungen: 150mm x 70mm edip320-i2c/com-board (Art.#1045) Das edip320-i²c/com-board ermöglicht einen einfachen Anschluß des
Betriebsspannung (1045-1 & -2): +5V Betriebsspannung (1045-3 & -4): +9 bis18v Abmessungen: 150mm x 70mm edip320-i2c/com-board (Art.#1045) Das edip320-i²c/com-board ermöglicht einen einfachen Anschluß des
LCD-Ansteuerung mit MikroForth
 Das Attiny-Projekt LCD-Ansteuerung mit MikroForth 1 LCD-Ansteuerung mit MikroForth Zu unserer Attiny-Platine wird standardmäßig ein kleines LCD von der Firma Pollin beigelegt. Dieses ist auf eine kleine
Das Attiny-Projekt LCD-Ansteuerung mit MikroForth 1 LCD-Ansteuerung mit MikroForth Zu unserer Attiny-Platine wird standardmäßig ein kleines LCD von der Firma Pollin beigelegt. Dieses ist auf eine kleine
8: IIC-Bussystem / PID
 8: IIC-Bussystem / PID Sie verstehen das IIC-Busprotokoll und können das IIC-Controller Modul des MC9S08JM60 zur Kommunikation mit anderen IIC-Busteilnehmern einsetzen. 1. Geschwindigkeitsmessung im MC-Car
8: IIC-Bussystem / PID Sie verstehen das IIC-Busprotokoll und können das IIC-Controller Modul des MC9S08JM60 zur Kommunikation mit anderen IIC-Busteilnehmern einsetzen. 1. Geschwindigkeitsmessung im MC-Car
5 Funktionsbibliothek für den Controller XMC1100
 5 Funktionsbibliothek für den Controller XMC11 Alle Header-Dateien werden in der Datei in ein richtlinienkonformes Projekt eingebunden. 5.1 Verzögerungsfunktionen Delay Verzögert den Programmablauf für
5 Funktionsbibliothek für den Controller XMC11 Alle Header-Dateien werden in der Datei in ein richtlinienkonformes Projekt eingebunden. 5.1 Verzögerungsfunktionen Delay Verzögert den Programmablauf für
ELECTRONIC SYS. 8 Channel 10 Bit A/D Wandler. seriell V USB V
 ELECTRONIC SYS 8 Channel 10 Bit A/D Wandler seriell V1.2 2006 USB V1.4 2006 Achtung: Der serielle Wandler muss mit einer Betriebsspannung von 4,5 bis 5,5V über Pin4 + und Pin6 GND versorgt werden, näheres
ELECTRONIC SYS 8 Channel 10 Bit A/D Wandler seriell V1.2 2006 USB V1.4 2006 Achtung: Der serielle Wandler muss mit einer Betriebsspannung von 4,5 bis 5,5V über Pin4 + und Pin6 GND versorgt werden, näheres
Das kleine Einmaleins
 Ralf Pongratz Das kleine Einmaleins Schritt für Schritt zum Reaktivlicht Version 1.00.00 21. Juli 2012 www.reaktivlicht.de Inhaltsverzeichnis 1 Einleitung.................................................
Ralf Pongratz Das kleine Einmaleins Schritt für Schritt zum Reaktivlicht Version 1.00.00 21. Juli 2012 www.reaktivlicht.de Inhaltsverzeichnis 1 Einleitung.................................................
Ansteuerung eines LCD-Screens
 Ansteuerung eines LCD-Screens Marcel Meinersen 4. Mai 2013 Marcel Meinersen Ansteuerung eines LCD-Screens 4. Mai 2013 1 / 27 Inhaltsverzeichnis 1 Allgemeines Was ist ein LCD-Screen? LCD 162C LED Marcel
Ansteuerung eines LCD-Screens Marcel Meinersen 4. Mai 2013 Marcel Meinersen Ansteuerung eines LCD-Screens 4. Mai 2013 1 / 27 Inhaltsverzeichnis 1 Allgemeines Was ist ein LCD-Screen? LCD 162C LED Marcel
SRF05 Datenblatt (Deutsch/Englisch)
") SRF05 Datenblatt von robotikhardware.de Seite -1- SRF05 Datenblatt (Deutsch/Englisch) SRF05 LowCost Ultraschallsensor der neusten Generation Betriebsspannung Stromaufnahme Ultraschallfrequenz Maximale
SRF05 Datenblatt von robotikhardware.de Seite -1- SRF05 Datenblatt (Deutsch/Englisch) SRF05 LowCost Ultraschallsensor der neusten Generation Betriebsspannung Stromaufnahme Ultraschallfrequenz Maximale
RN-LCD-Adapter. Doku vom (stets aktuelle Dokumentation verwenden)
") RN-LCD-Adapter RN-LCD-Adapter ist ein weiterer sehr nützlicher Adapter. Er erlaubt das komfortable nutzen, anschließen und befestigen der beliebten DIP-LCD s (Dip204 4 x 20 Zeichen). Diese neuen LCD s
RN-LCD-Adapter RN-LCD-Adapter ist ein weiterer sehr nützlicher Adapter. Er erlaubt das komfortable nutzen, anschließen und befestigen der beliebten DIP-LCD s (Dip204 4 x 20 Zeichen). Diese neuen LCD s
Sie haben die Möglichkeit durch unzählige Parameter die Software ihren Bedürfnissen Anzupassen
 1. Programmbeschreibung Durch die Software die extra für das RN-Power 4 neuentwickelt wurde, haben Sie die Möglichkeit ohne weitere Verschwendung von Rechenleistung, sei es von einem PC oder eines zweit
1. Programmbeschreibung Durch die Software die extra für das RN-Power 4 neuentwickelt wurde, haben Sie die Möglichkeit ohne weitere Verschwendung von Rechenleistung, sei es von einem PC oder eines zweit
Allgemein...2. Inbetriebnahme...2. Tastatur-Bedienung Funktions-Matrix...2. Main- und Kanal-Volume-Einstellung...3. Timecode...3
 1 Allgemein...2 Inbetriebnahme...2 Tastatur-Bedienung Funktions-Matrix...2 Main- und Kanal-Volume-Einstellung...3 Timecode...3 RS-232 Kommunikation...3 Software-Update...3 Beschreibung der Anschlussleisten...3
1 Allgemein...2 Inbetriebnahme...2 Tastatur-Bedienung Funktions-Matrix...2 Main- und Kanal-Volume-Einstellung...3 Timecode...3 RS-232 Kommunikation...3 Software-Update...3 Beschreibung der Anschlussleisten...3
TPA81 Infrarot-Temperatursensor-Zeile Technische Spezifikation
 Einführung TPA81 Infrarot-Temperatursensor-Zeile Technische Spezifikation Das TPA81 ist ein kontaktloses Infrarot-Fernthermometer im 2-22µm Bereich (Wärmestrahlung) und nutzt eine sogenannte Thermopile-Sensor-Zeile.
Einführung TPA81 Infrarot-Temperatursensor-Zeile Technische Spezifikation Das TPA81 ist ein kontaktloses Infrarot-Fernthermometer im 2-22µm Bereich (Wärmestrahlung) und nutzt eine sogenannte Thermopile-Sensor-Zeile.
Universelles Zählermodul UCM-5
 Universelles Zählermodul UCM-5 Bedienungsanleitung Inhalt Seite 1. Übersicht 2 2. Anwendung 2 2.1 Kostenstellen-Analyse 2.2 Regelung der Blindleistung 3. Funktion 3 4. Programmierung 4 4.1 Modbus-ID 4.2
Universelles Zählermodul UCM-5 Bedienungsanleitung Inhalt Seite 1. Übersicht 2 2. Anwendung 2 2.1 Kostenstellen-Analyse 2.2 Regelung der Blindleistung 3. Funktion 3 4. Programmierung 4 4.1 Modbus-ID 4.2
Excel VBA. Teil 11.8. Zusammenfassung! Was wir können sollten! V0.5 5.4.2013
 Excel VBA Teil 11.8 Zusammenfassung! Was wir können sollten! V0.5 5.4.2013 1 von 17 Inhaltsverzeichnis Seite 3... Modul einfügen Seite 4... Prozeduren oder Funktionen Seite 5... Ein/Ausgaben Seite 6...
Excel VBA Teil 11.8 Zusammenfassung! Was wir können sollten! V0.5 5.4.2013 1 von 17 Inhaltsverzeichnis Seite 3... Modul einfügen Seite 4... Prozeduren oder Funktionen Seite 5... Ein/Ausgaben Seite 6...
'
 ------------------------------------------------------------------------------ Sorry für diese Art der Darstellung. So stelle ich sicher, daß niveaulose Trittbrettfahrer die Daten wenigstens selbst einmal
------------------------------------------------------------------------------ Sorry für diese Art der Darstellung. So stelle ich sicher, daß niveaulose Trittbrettfahrer die Daten wenigstens selbst einmal
LED PowerBar 4 DMX BEDIENUNGSANLEITUNG
 LED PowerBar 4 DMX BEDIENUNGSANLEITUNG Vielen Dank für den Kauf dieses LITECRAFT Produktes. Zu Ihrer eigenen Sicherheit lesen Sie bitte vor der ersten Inbetriebnahme diese Bedienungsanleitung sorgfältig
LED PowerBar 4 DMX BEDIENUNGSANLEITUNG Vielen Dank für den Kauf dieses LITECRAFT Produktes. Zu Ihrer eigenen Sicherheit lesen Sie bitte vor der ersten Inbetriebnahme diese Bedienungsanleitung sorgfältig
PC Power-Modul v1 Technische Daten / Infos Technischer Ablauf - Funktionsprinzip
 PC Power-Modul v1 Das Power-Modul wird zusammen mit der USB-Master-Slave Steckdose v2 eingesetzt. Der Anschluss von der USB-Steckdose wird nun mit dem Power-Modul verbunden (also nicht mehr mit dem USB-Port
PC Power-Modul v1 Das Power-Modul wird zusammen mit der USB-Master-Slave Steckdose v2 eingesetzt. Der Anschluss von der USB-Steckdose wird nun mit dem Power-Modul verbunden (also nicht mehr mit dem USB-Port
Selbstbau-USB-Programmiergerät für AVR
 Jean-claude.feltes@education.lu 1 Selbstbau-USB-Programmiergerät für AVR Nach Christian Ullrich Homepage: www.ullihome.de Weitere Infos bei http://weigu.lu/a/pdf/micel_f6_programmieradapter.pdf Schaltung
Jean-claude.feltes@education.lu 1 Selbstbau-USB-Programmiergerät für AVR Nach Christian Ullrich Homepage: www.ullihome.de Weitere Infos bei http://weigu.lu/a/pdf/micel_f6_programmieradapter.pdf Schaltung
Klasse, Name : Datum : Rad l/r Linienfolger l/r Laderaum ATMEGA 128
 HTL_RoboterDKU.odt Übung : Arbeiten mit dem HTL Leonding Roboter Seite : 1 von 7 1. Roboter Peripherie Eingänge Ausgänge DIGITAL ANA- LG DATEN Taster Kante l/r Rad l/r Linienfolger l/r Laderaum Klappe
HTL_RoboterDKU.odt Übung : Arbeiten mit dem HTL Leonding Roboter Seite : 1 von 7 1. Roboter Peripherie Eingänge Ausgänge DIGITAL ANA- LG DATEN Taster Kante l/r Rad l/r Linienfolger l/r Laderaum Klappe
T3 EC / EE ATTPRO. 6 Mess/SlaveStation. 6.1 Schaltung. Abb. 29. Schaltplan (Slavestation). Man Chun Ling -37-
. Man Chun Ling -37-") 6 Mess/SlaveStation 6.1 Schaltung Abb. 29. Schaltplan (Slavestation). -37- Layout Abb. 30: Layout (Slavestation). Bestückungsfolie Abb. 31: Bestückungsfolie (Slavestation). -38- 6.1.1 Bauteilliste 1x Patine
6 Mess/SlaveStation 6.1 Schaltung Abb. 29. Schaltplan (Slavestation). -37- Layout Abb. 30: Layout (Slavestation). Bestückungsfolie Abb. 31: Bestückungsfolie (Slavestation). -38- 6.1.1 Bauteilliste 1x Patine
Bedienungsanleitung. Digitale T-Bar T-4
 Bedienungsanleitung Digitale T-Bar T-4 Inhaltsverzeichnis 1. Sicherheitshinweise... 3 1.1. Hinweise für den sicheren und einwandfreien Gebrauch... 3 2. Einführung... 4 3. Technische Daten... 4 4. Bedienung...
Bedienungsanleitung Digitale T-Bar T-4 Inhaltsverzeichnis 1. Sicherheitshinweise... 3 1.1. Hinweise für den sicheren und einwandfreien Gebrauch... 3 2. Einführung... 4 3. Technische Daten... 4 4. Bedienung...
Technische Dokumentation MDK DC Motion Control V1.0
 Technische Dokumentation MDK DC Motion Control V1.0 David Wemhöner 19. Juli 2014 1 1 Funktionsübersicht MDK DC Motion Control ist eine Arduino basierende Steuerung für Gleichstrommotoren und Kamera für
Technische Dokumentation MDK DC Motion Control V1.0 David Wemhöner 19. Juli 2014 1 1 Funktionsübersicht MDK DC Motion Control ist eine Arduino basierende Steuerung für Gleichstrommotoren und Kamera für
Arduino Kurs Das LC-Display. Stephan Laage-Witt FES Lörrach
 Arduino Kurs Das LC-Display Stephan Laage-Witt FES Lörrach - 2018 Themen LC-Display zur Anzeige von Text Serieller Datenbus Ausgabe von Zeichen, Texten und Zahlen FES Lörrach Juli 2017 2 LC-Display zur
Arduino Kurs Das LC-Display Stephan Laage-Witt FES Lörrach - 2018 Themen LC-Display zur Anzeige von Text Serieller Datenbus Ausgabe von Zeichen, Texten und Zahlen FES Lörrach Juli 2017 2 LC-Display zur
Anschluss Großdisplay
 Solutronic Energy GmbH Küferstrasse18 D-73257 Köngen Fon +49 (0) 70 24-9 61 28-0 Fax +49 (0) 24-9 61 28-50 www.solutronic.de Anschluss Großdisplay Anschluss Großdisplay für SP 25-55, SOLCOMBOX RS 2014-04
Solutronic Energy GmbH Küferstrasse18 D-73257 Köngen Fon +49 (0) 70 24-9 61 28-0 Fax +49 (0) 24-9 61 28-50 www.solutronic.de Anschluss Großdisplay Anschluss Großdisplay für SP 25-55, SOLCOMBOX RS 2014-04
BLUE line. Bedienungsanleitung zum M-Unit Experimentierboard. Innovative Technik. Tobias Regenhardt Grüner Weg Seulingen
 BLUE line Innovative Technik Bedienungsanleitung zum M-Unit Experimentierboard Stand: November 2003 Tobias Regenhardt Grüner Weg 6 37136 Seulingen Tel: 0175/2716591 e-mail: TobiasRegenhardt@web.de Vorwort
BLUE line Innovative Technik Bedienungsanleitung zum M-Unit Experimentierboard Stand: November 2003 Tobias Regenhardt Grüner Weg 6 37136 Seulingen Tel: 0175/2716591 e-mail: TobiasRegenhardt@web.de Vorwort
PROJEKTIEREN EINES SMARTSTIX S MIT CSCAPE
 Horner - So einfach geht s PROJEKTIEREN EINES SMARTSTIX S MIT CSCAPE In dieser Kurzbeschreibung wird gezeigt, wie man ein CsCAN-SmartStix-E/A-Modul an eine Horner-Steuerung anschließt und wie mit Cscape
Horner - So einfach geht s PROJEKTIEREN EINES SMARTSTIX S MIT CSCAPE In dieser Kurzbeschreibung wird gezeigt, wie man ein CsCAN-SmartStix-E/A-Modul an eine Horner-Steuerung anschließt und wie mit Cscape
Bedienungsanleitung SKYLed V2
 For english, please visit the download section of www.innosky.ch Bedienungsanleitung Deutsch Seite 1 Bedienungsanleitung Vielen Dank für den Kauf von SKYLed. Mit SKYLed haben Sie sich für ein höchst universelles
For english, please visit the download section of www.innosky.ch Bedienungsanleitung Deutsch Seite 1 Bedienungsanleitung Vielen Dank für den Kauf von SKYLed. Mit SKYLed haben Sie sich für ein höchst universelles
zu große Programme (Bildschirmseite!) zerlegen in (weitgehend) unabhängige Einheiten: Unterprogramme
 zerlegen in (weitgehend) unabhängige Einheiten: Unterprogramme") Bisher Datentypen: einfach Zahlen, Wahrheitswerte, Zeichenketten zusammengesetzt Arrays (Felder) zur Verwaltung mehrerer zusammengehörender Daten desselben Datentypes eindimensional, mehrdimensional, Array-Grenzen
Bisher Datentypen: einfach Zahlen, Wahrheitswerte, Zeichenketten zusammengesetzt Arrays (Felder) zur Verwaltung mehrerer zusammengehörender Daten desselben Datentypes eindimensional, mehrdimensional, Array-Grenzen
Chip veraltet, für neue Anwendungen nicht empfehlenswert!
 Experiment 3: Analog-Digital-Wandler über I2C V1.2 DK4AQ, 14.05.2013 Preis derzeit: 2,45 (Reichelt) Chip veraltet, für neue Anwendungen nicht empfehlenswert! 4 AD-Wandler + 1 DA-Wandler Auflösung: 8bit
Experiment 3: Analog-Digital-Wandler über I2C V1.2 DK4AQ, 14.05.2013 Preis derzeit: 2,45 (Reichelt) Chip veraltet, für neue Anwendungen nicht empfehlenswert! 4 AD-Wandler + 1 DA-Wandler Auflösung: 8bit
I2C-002 DATASHEET I2C-002 V1.00: I2C PORTEXPANDER MIT PCA8574. Dokument NR.: I2C-002_Datasheet
 I2C-002 DATASHEET Dokument NR.: I2C-002_Datasheet I2C-002 V1.00: I2C PORTEXPANDER MIT PCA8574 P Bitte denken Sie an die Umwelt, bevor Sie diese Datei ausdrucken Inhaltsverzeichnis 1. Modul Bilder...3 2.
I2C-002 DATASHEET Dokument NR.: I2C-002_Datasheet I2C-002 V1.00: I2C PORTEXPANDER MIT PCA8574 P Bitte denken Sie an die Umwelt, bevor Sie diese Datei ausdrucken Inhaltsverzeichnis 1. Modul Bilder...3 2.
Computer Watchdog. Allgemeines. Funktionalität. Seite 1 von 6 Beschreibung D
 Seite 1 von 6 Bär Industrie-Elektronik GmbH Siemensstr. 3 D-90766 Fürth Telefon 0911/970590 Telefax +49 911 9705950 Allgemeines Mit der Computer Watchdog-Box CWD01 können Programme (Anwendungen) dahingehend
Seite 1 von 6 Bär Industrie-Elektronik GmbH Siemensstr. 3 D-90766 Fürth Telefon 0911/970590 Telefax +49 911 9705950 Allgemeines Mit der Computer Watchdog-Box CWD01 können Programme (Anwendungen) dahingehend
Beschreibung der Steuerung für DB0RWP DB0RWP
 Beschreibung der Steuerung für DB0RWP TX 438,575 MHz RX 430,975 MHz DB0RWP 439,125 MHz 439,325 MHz 438,575 MHz 438,575 MHz Aufgaben der LED's und Trimmer Grüne LED NF vom RX liegt an Rote LED NF zum TX
Beschreibung der Steuerung für DB0RWP TX 438,575 MHz RX 430,975 MHz DB0RWP 439,125 MHz 439,325 MHz 438,575 MHz 438,575 MHz Aufgaben der LED's und Trimmer Grüne LED NF vom RX liegt an Rote LED NF zum TX
Kurzanleitung: 1. Anschüsse. MWCLightRGB by VoBo & HaDi-RC HW-Version 1.80 SW-Version >1.28
 Kurzanleitung: 1. Anschüsse Input: 3,8 bis 5 Volt! (nicht 5,5 V oder 6 V!) Output: Anschlüsse für WS2812 LED-Bänder (6/9 LED s / Arm) RC1: RC-Kanal - Auswahl der Funktion/Lichtmuster RC2: RC-Kanal - Auswahl
Kurzanleitung: 1. Anschüsse Input: 3,8 bis 5 Volt! (nicht 5,5 V oder 6 V!) Output: Anschlüsse für WS2812 LED-Bänder (6/9 LED s / Arm) RC1: RC-Kanal - Auswahl der Funktion/Lichtmuster RC2: RC-Kanal - Auswahl
Zusatzanleitung. MPR-1 I²C-Protokoll. Version 1.01
 Zusatzanleitung MPR-1 I²C-Protokoll DE Version 1.01 Inhalt Inhalt 1. I²C Allgemein... 1 1.1 Beschreibung... 1 1.2 Konfiguration... 1 2. I²C-Protokoll des Drucksensormoduls MPR-1... 2 2.1 Parameter... 2
Zusatzanleitung MPR-1 I²C-Protokoll DE Version 1.01 Inhalt Inhalt 1. I²C Allgemein... 1 1.1 Beschreibung... 1 1.2 Konfiguration... 1 2. I²C-Protokoll des Drucksensormoduls MPR-1... 2 2.1 Parameter... 2
Benutzerhandbuch Manual V. X10 - Relay (4 fach) - FC_XRM-01
 - FC_XRM-01") Manual V. 1.1.0 X10 - Relay (4 fach) - FC_XRM-01 Benutzerhandbuch FineSell GmbH Bahnhofstrasse 18 09111 Chemnitz Web: finesell.de Email: info@finesell.de 1. Produktvorstellung 2. Einstellungen 3. Schaltpläne
Manual V. 1.1.0 X10 - Relay (4 fach) - FC_XRM-01 Benutzerhandbuch FineSell GmbH Bahnhofstrasse 18 09111 Chemnitz Web: finesell.de Email: info@finesell.de 1. Produktvorstellung 2. Einstellungen 3. Schaltpläne
SBF - Studio Bedienfeld für MMIB
 Keyboard Control KB20 Keyboard Studio Bedienfeld für The products and specifications are subject to change without notice. Please ask for the latest releases to guarantee the satisfaction of your product
Keyboard Control KB20 Keyboard Studio Bedienfeld für The products and specifications are subject to change without notice. Please ask for the latest releases to guarantee the satisfaction of your product
Raspberry Pi Rezepte Teil 5
 Raspberry Pi Rezepte Teil 5 I²C: Zwischen zwei ICs Von Tony Dixon (UK) In den letzten beiden Folgen von Elektor.POST ging es um die seriellen Schnittstellen UART und SPI auf dem Expansion Header von RPi.
Raspberry Pi Rezepte Teil 5 I²C: Zwischen zwei ICs Von Tony Dixon (UK) In den letzten beiden Folgen von Elektor.POST ging es um die seriellen Schnittstellen UART und SPI auf dem Expansion Header von RPi.
Handbuch. VTC8115 Widerstandslast
 Handbuch VTC8115 Widerstandslast Impressum Bahnhofstr. 44 71409 Schwaikheim Tel.: +49 7195-977256-0 info@ibbundpartner.de Inhaltsverzeichnis 1 Sicherheitshinweise...- 2-2 Überblick...- 3-3 Bedienelemente
Handbuch VTC8115 Widerstandslast Impressum Bahnhofstr. 44 71409 Schwaikheim Tel.: +49 7195-977256-0 info@ibbundpartner.de Inhaltsverzeichnis 1 Sicherheitshinweise...- 2-2 Überblick...- 3-3 Bedienelemente
Arduino µcontroller. Virtuelle COMSchnittstelle
 Aufgaben: Arduino µcontroller 1. Die gegebene Software auf einen ARDUINO MEGA-Board aufspielen weil die PORTS A (8xSchalter) und C (8xLEDs) benutzt werden. Steht nur ein UNO-Board zur Verfügung, dann den
Aufgaben: Arduino µcontroller 1. Die gegebene Software auf einen ARDUINO MEGA-Board aufspielen weil die PORTS A (8xSchalter) und C (8xLEDs) benutzt werden. Steht nur ein UNO-Board zur Verfügung, dann den
qfix ASCII-Protokoll
 www.qfix.de qfix ASCII-Protokoll Referenz qfix Dokument Nr. D100502R1 Inhaltsverzeichnis 1 Einleitung 3 1.1 Referenz................................... 3 2 qfix ASCII Protokoll 4 2.1 Verbindung und Zeichensatz.........................
www.qfix.de qfix ASCII-Protokoll Referenz qfix Dokument Nr. D100502R1 Inhaltsverzeichnis 1 Einleitung 3 1.1 Referenz................................... 3 2 qfix ASCII Protokoll 4 2.1 Verbindung und Zeichensatz.........................
easyident Türöffner mit integriertem USB Interface
 easyident Türöffner mit integriertem USB Interface Art. Nr. FS-0007-SEM Wir freuen uns, das sie sich für unser Produkt easyident Türöffner, mit Transponder Technologie entschieden haben. Easyident Türöffner
easyident Türöffner mit integriertem USB Interface Art. Nr. FS-0007-SEM Wir freuen uns, das sie sich für unser Produkt easyident Türöffner, mit Transponder Technologie entschieden haben. Easyident Türöffner
X-DIMMER-3 HP. Eingangsstrom... 6,5A max. (Externe Strombegrenzung durch Netzteil wird empfohlen) Ausgänge... 3
 Ausgänge... 3") Änderungen am Produkt oder der Dokumentation -ohne vorherige Ankündigung- vorbehalten! BEDIENUNGSANLEITUNG PRODUKTBESCHREIBUNG Vielen Dank für Ihre Entscheidung zum Kauf eines X-DIMMER- HP. Lesen Sie diese
Änderungen am Produkt oder der Dokumentation -ohne vorherige Ankündigung- vorbehalten! BEDIENUNGSANLEITUNG PRODUKTBESCHREIBUNG Vielen Dank für Ihre Entscheidung zum Kauf eines X-DIMMER- HP. Lesen Sie diese
Lösungen der Aufgaben
 ASCII Aufgabe 1 loop printbin 77 Aufgabe 2 dim b as byte For b = 65 to 90 printbin b next b end Aufgabe 3.2 Dim b as byte loop inputbin b b = b - 32 printbin b Aufgabe 4 wait 5 printbin 72 printbin 97
ASCII Aufgabe 1 loop printbin 77 Aufgabe 2 dim b as byte For b = 65 to 90 printbin b next b end Aufgabe 3.2 Dim b as byte loop inputbin b b = b - 32 printbin b Aufgabe 4 wait 5 printbin 72 printbin 97
Dokumentation I2C-IO-Max-V1 Modul für Schalttafeleinbau
 Dokumentation I2C-IO-Max-V1 Modul für Schalttafeleinbau 1. Einsatzbereich: Steuerung von elektrischen Verbrauchern wie z. B.: Beleuchtung Pumpen Rolladen- und Markiesenantrieben usw... Verarbeitung von
Dokumentation I2C-IO-Max-V1 Modul für Schalttafeleinbau 1. Einsatzbereich: Steuerung von elektrischen Verbrauchern wie z. B.: Beleuchtung Pumpen Rolladen- und Markiesenantrieben usw... Verarbeitung von
Praktische Einführung in die AVR-NET-IO. Programmierung
 Praktische Einführung in die AVR-NET-IO Programmierung Geschrieben von Bernd Ortmann, 03.02.2011 Inhaltsverzeichnis Inhaltsverzeichnis... 2 Einleitung... 4 1.0 Erste Überlegung... 5 1.1 IO-Box... 6 2.0
Praktische Einführung in die AVR-NET-IO Programmierung Geschrieben von Bernd Ortmann, 03.02.2011 Inhaltsverzeichnis Inhaltsverzeichnis... 2 Einleitung... 4 1.0 Erste Überlegung... 5 1.1 IO-Box... 6 2.0
GPS-Funkübertragungssystem mit Bluetooth-Anbindung. Benutzerhandbuch
 GPS-Funkübertragungssystem mit Bluetooth-Anbindung Benutzerhandbuch Stand: 20.05.2014 Inhaltsverzeichnis 1 Prinzipielle Funktionsweise...1 2 Lieferumfang...2 3 Transmitter-Modul (Sender)...2 3.1 Übersicht...2
GPS-Funkübertragungssystem mit Bluetooth-Anbindung Benutzerhandbuch Stand: 20.05.2014 Inhaltsverzeichnis 1 Prinzipielle Funktionsweise...1 2 Lieferumfang...2 3 Transmitter-Modul (Sender)...2 3.1 Übersicht...2
Bausatz mit 2 16 Zeichen LCD-Display
 C S Technology Ltd. cstech.co.uk DTMF-Display 32 Bausatz mit 2 16 Zeichen LCD-Display Unser DTMF-Display kann bis zu 32 Zeichen anzeigen (16 pro Zeile). Die Anzeige kann über einen Druckschalter (nicht
C S Technology Ltd. cstech.co.uk DTMF-Display 32 Bausatz mit 2 16 Zeichen LCD-Display Unser DTMF-Display kann bis zu 32 Zeichen anzeigen (16 pro Zeile). Die Anzeige kann über einen Druckschalter (nicht
Computergestützte Ansteuerung digitaler Eisenbahnanlagen
 Computergestützte Ansteuerung digitaler Eisenbahnanlagen Märklin Digital Paul Römer Agenda 2 Märklin & Märklin Digital Wissenswertes Bedienelemente Ansteuerung Steuercomputer Interface und Digitalstrom
Computergestützte Ansteuerung digitaler Eisenbahnanlagen Märklin Digital Paul Römer Agenda 2 Märklin & Märklin Digital Wissenswertes Bedienelemente Ansteuerung Steuercomputer Interface und Digitalstrom
Dämmerungsschalter PL0042 mit Hysteresis
 Seite 1 von 8 Bedienungsanleitung Inhaltsverzeichnis Bedienungsanleitung... 1 1. Allgemeines... 2 2. Funktionsweise/Normalbetrieb... 3 3. Programmierung... 3 4. Versetzung in den Auslieferungszustand...
Seite 1 von 8 Bedienungsanleitung Inhaltsverzeichnis Bedienungsanleitung... 1 1. Allgemeines... 2 2. Funktionsweise/Normalbetrieb... 3 3. Programmierung... 3 4. Versetzung in den Auslieferungszustand...