fsm 2007 Houston Texas
|
|
|
- Siegfried Beyer
- vor 8 Jahren
- Abrufe
Transkript
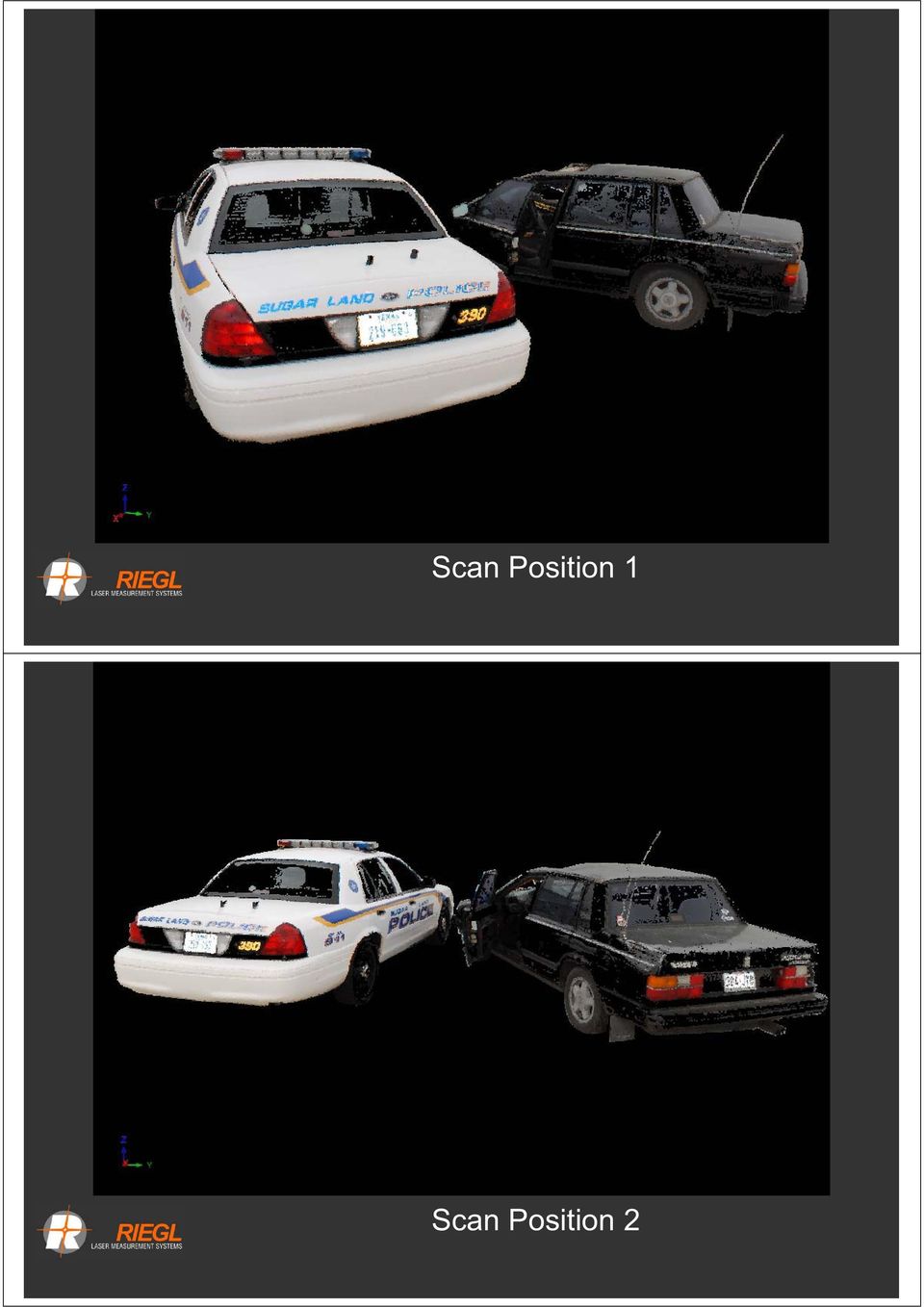
1 fsm 2007 Houston Texas 2 Operators RIEGL 3D Laser Scanner NIKON D200 & CANON G6 Google Earth for Registration RiSCAN PRO & Phidias

2 Scan Position 1 Scan Position 2
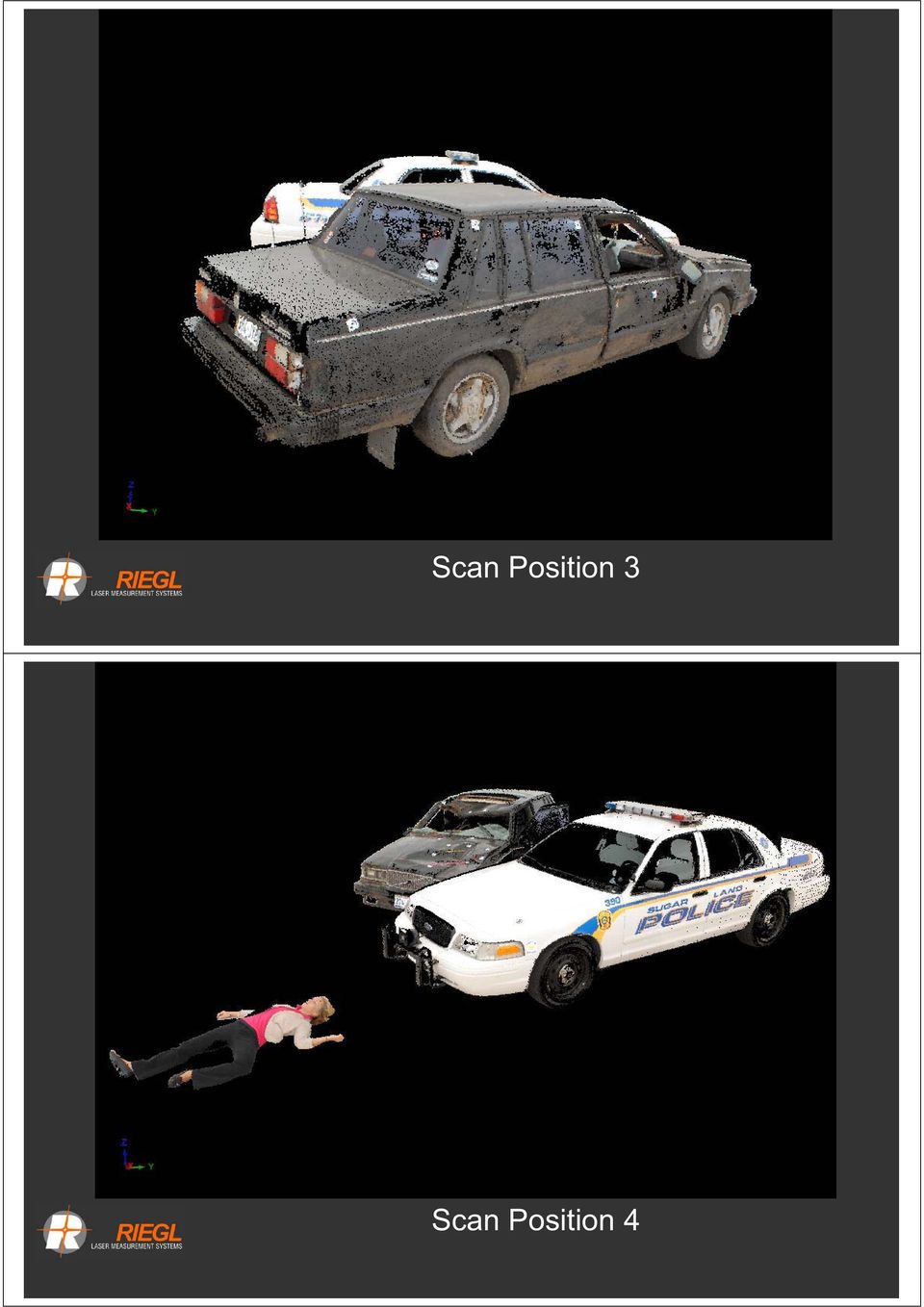
3 Scan Position 3 Scan Position 4
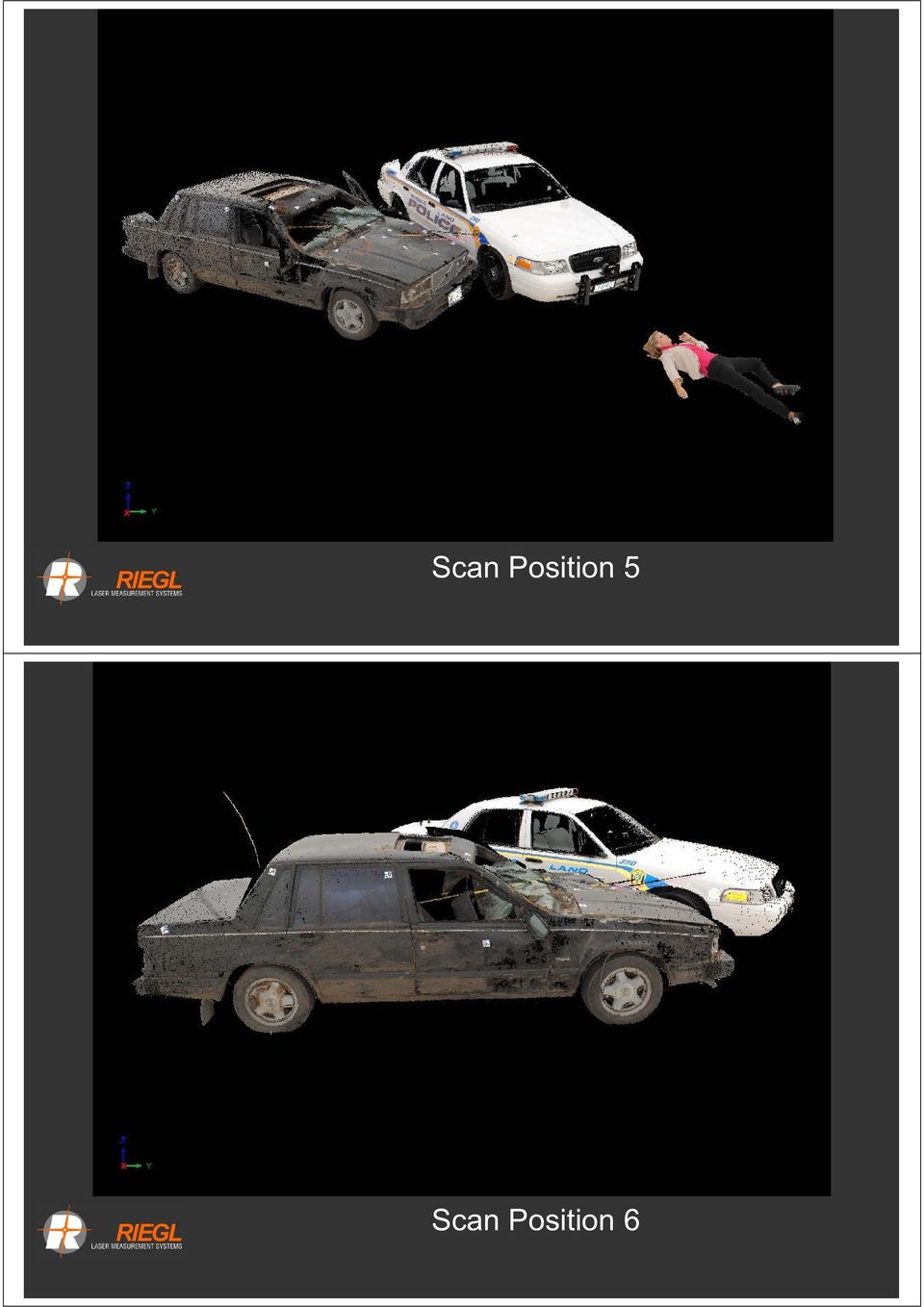
4 Scan Position 5 Scan Position 6
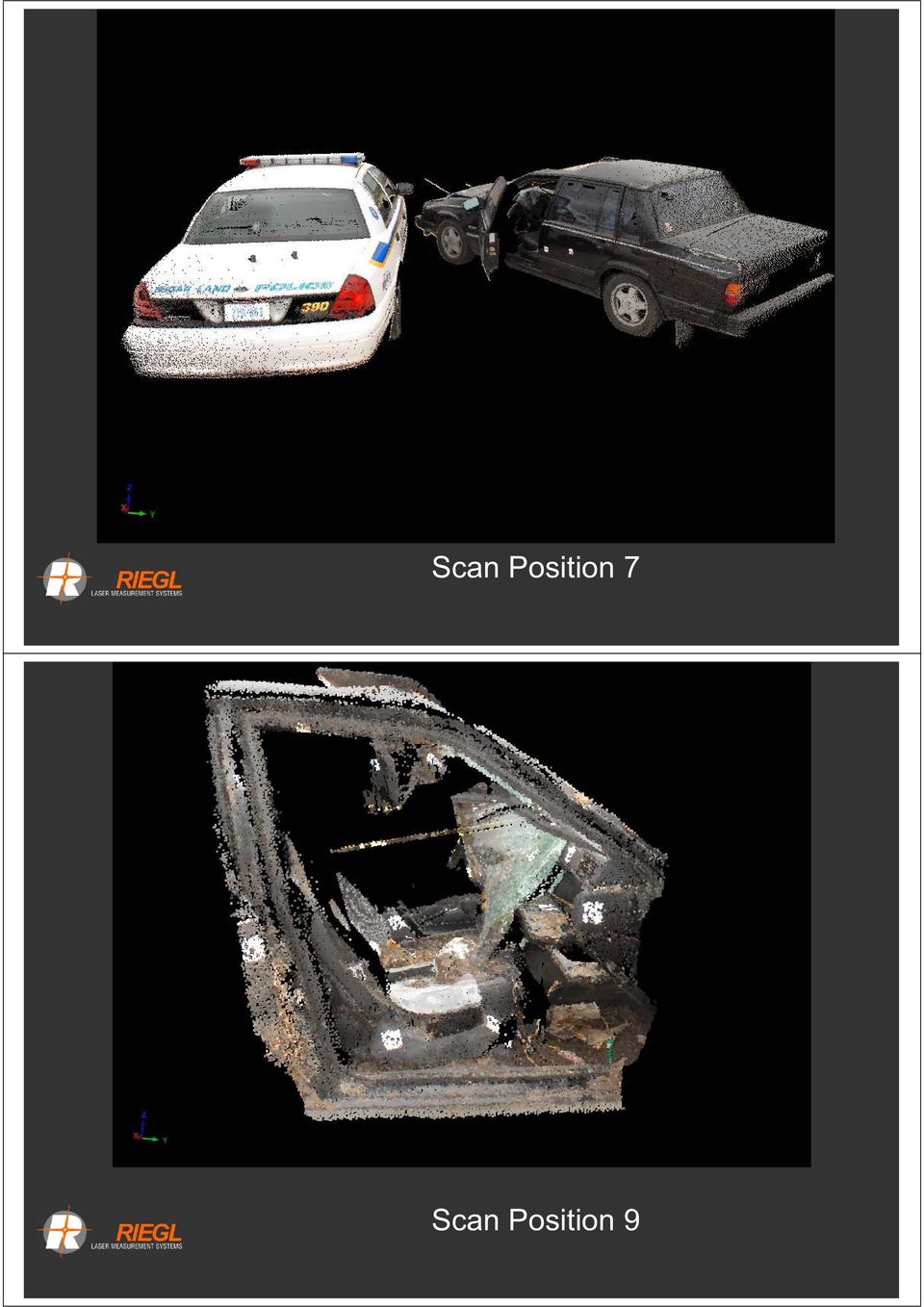
5 Scan Position 7 Scan Position 9
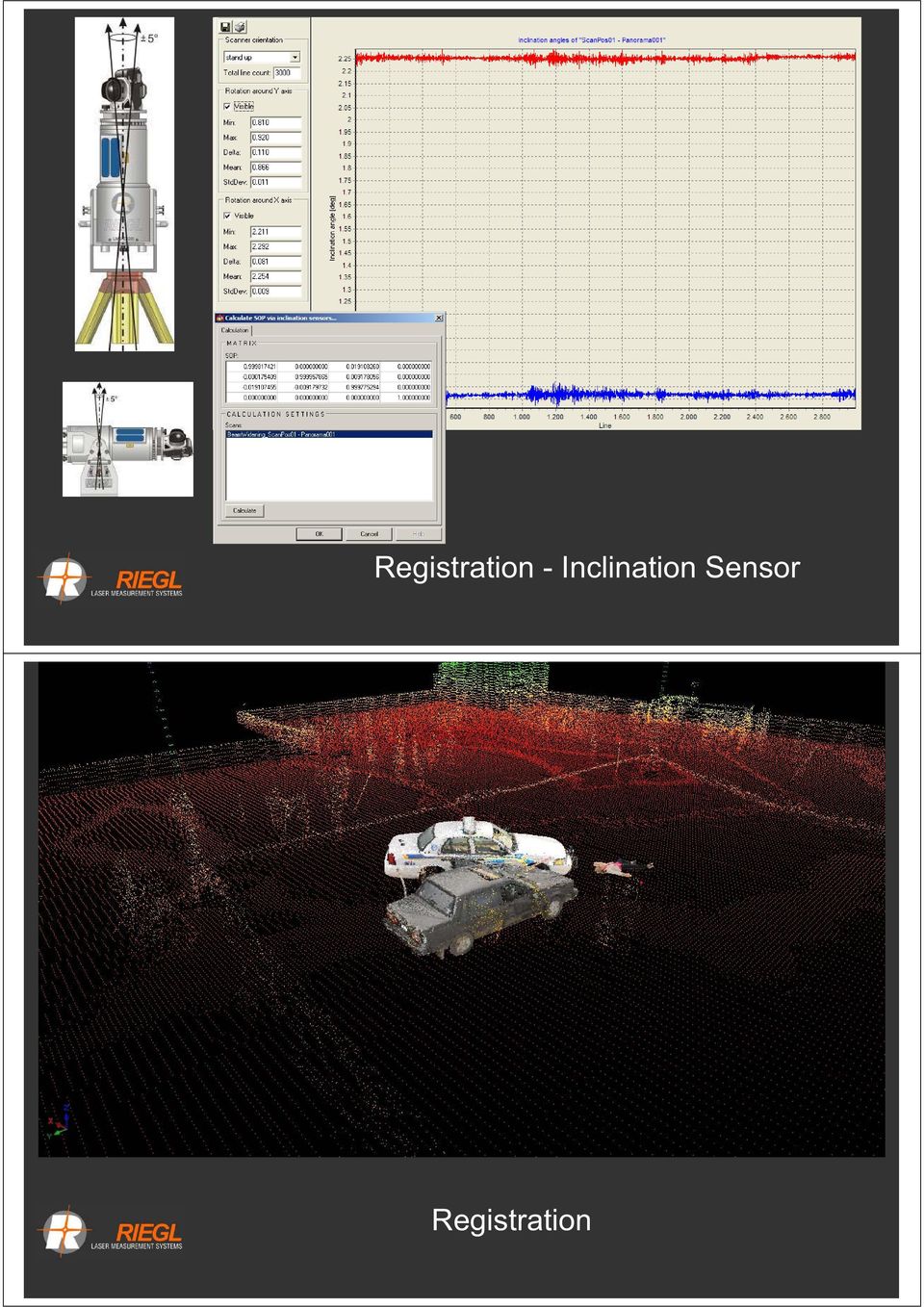
6 Registration - Inclination Sensor Registration
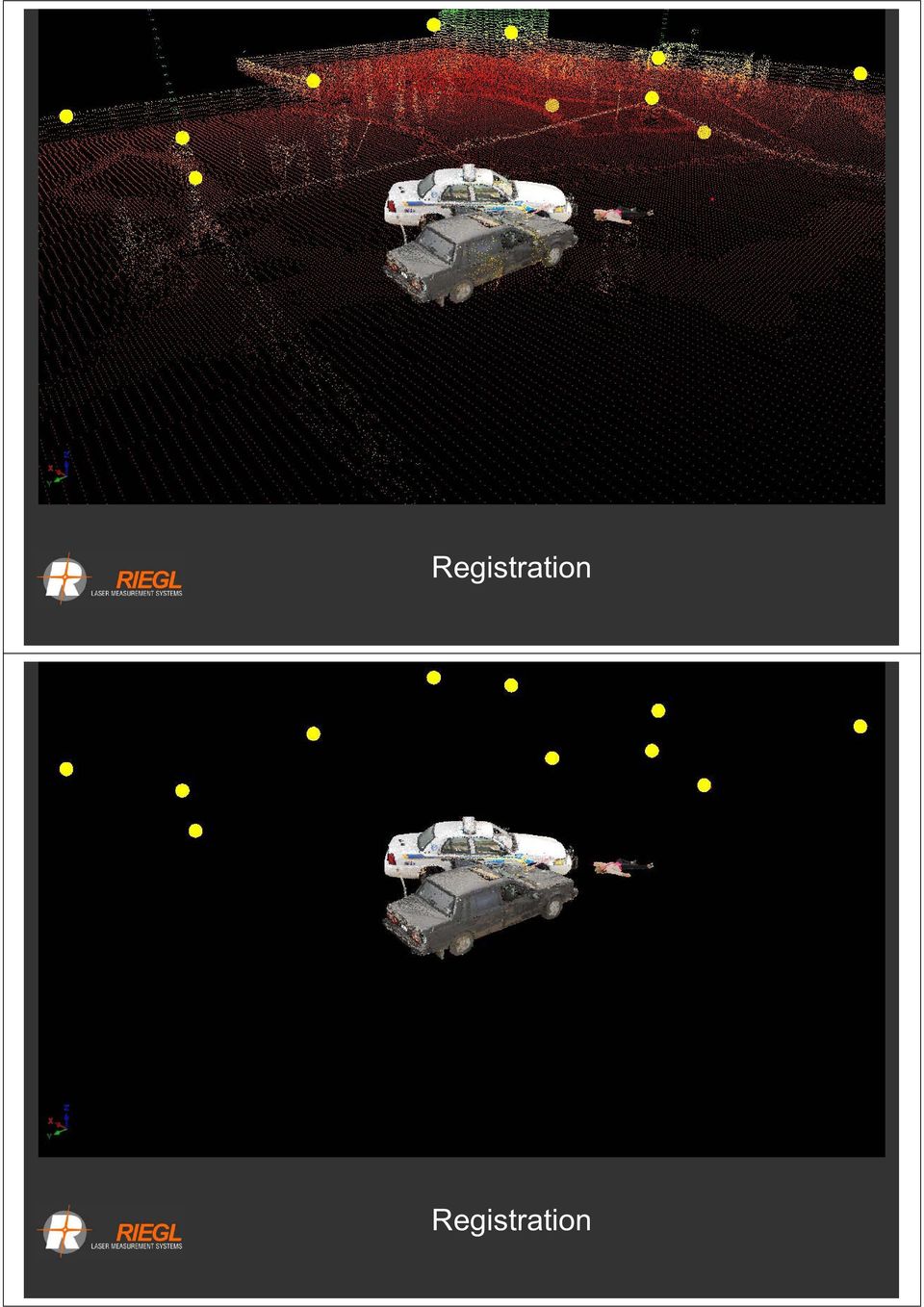
7 Registration Registration
8 Registration Registration

9 Registration Project: 2007_03_Houston Error (StdDev) [m]: m Number of pointpairs used for calculation: Tiepoints: 274 Name delta X delta Y delta Z delta Roll delta Pitch delta Yaw # Remarks ScanPos Locked ScanPos ScanPos ScanPos ScanPos ScanPos ScanPos07 Z ScanPos08 Z ScanPos ScanPos ScanPos Registration Accuracy

10 Time for Data Acquisition: 4h Time for Visualization (RiSCAN PRO): 8h Time for Postprocessing (Phidias): 10h Registration Accuracy Scan Position 1-9

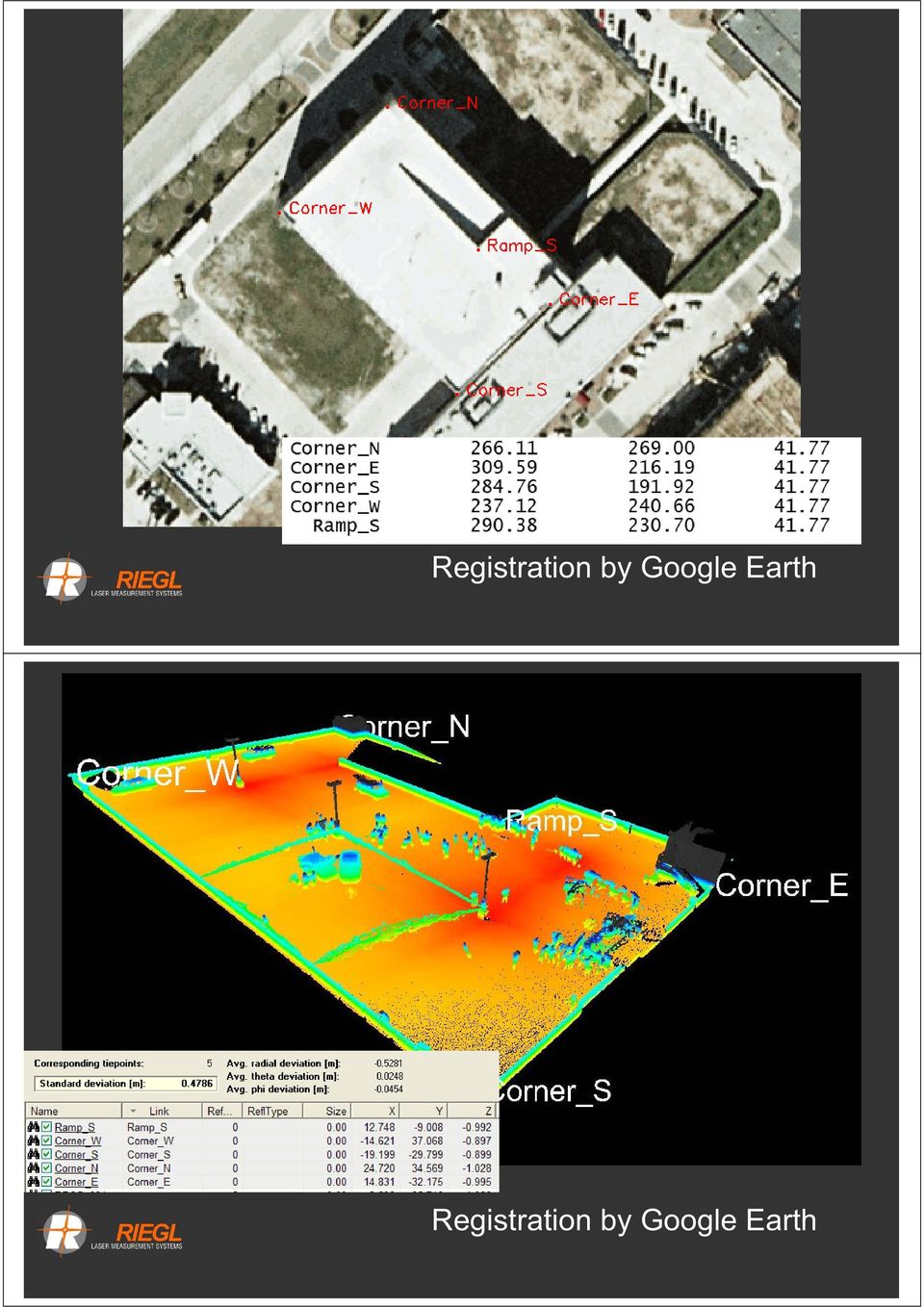
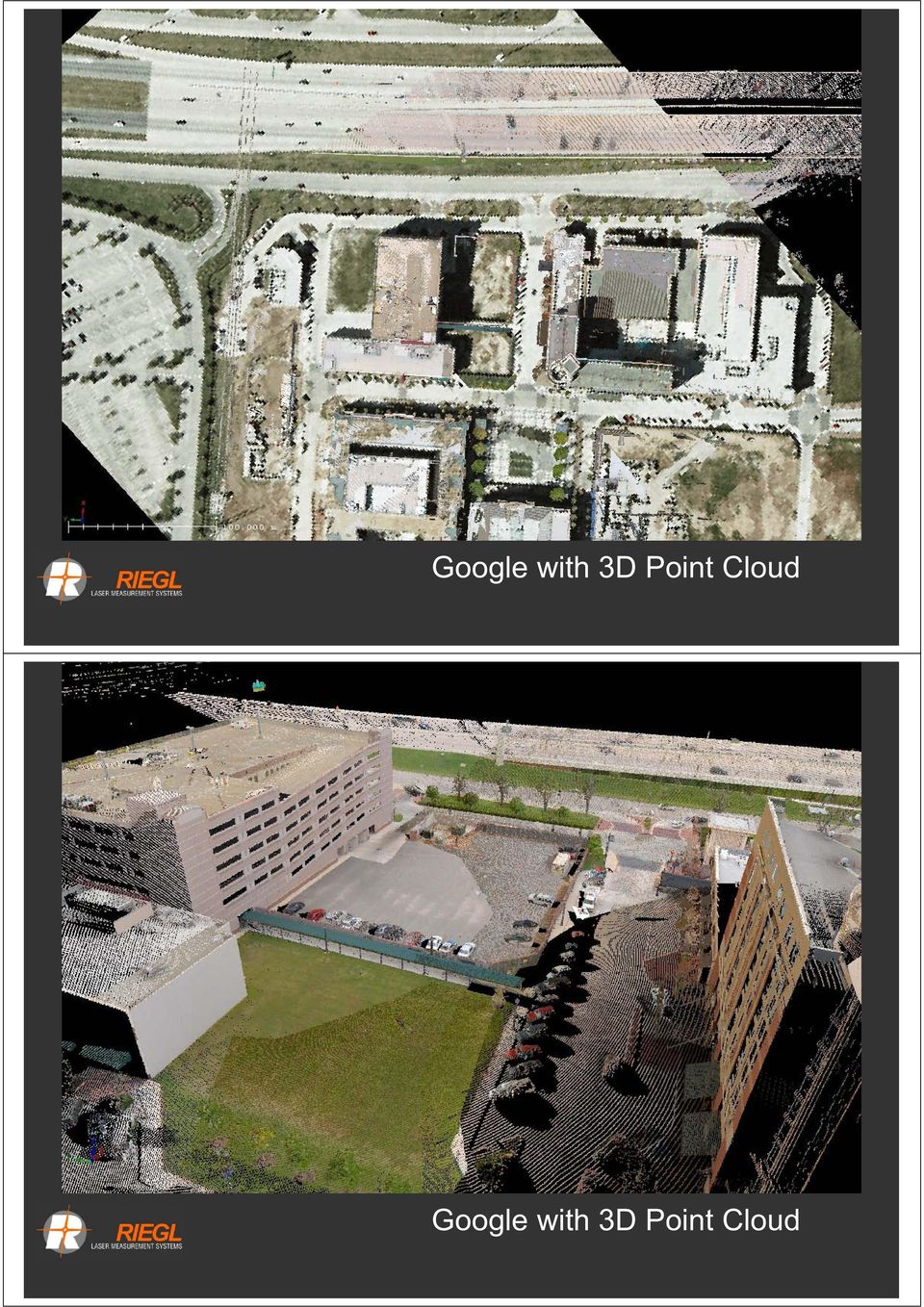
11 Registration by Google Earth Registration by Google Earth
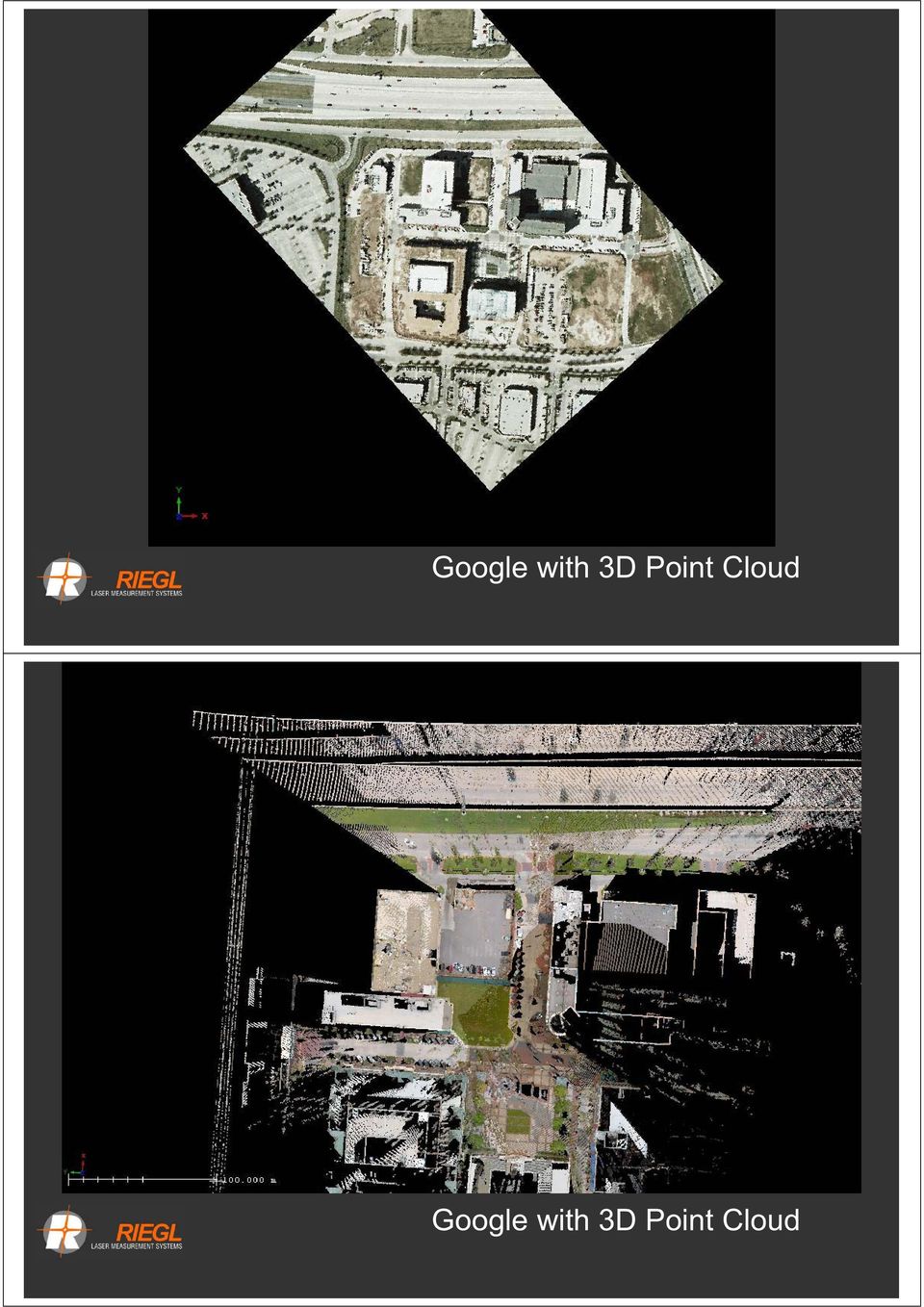
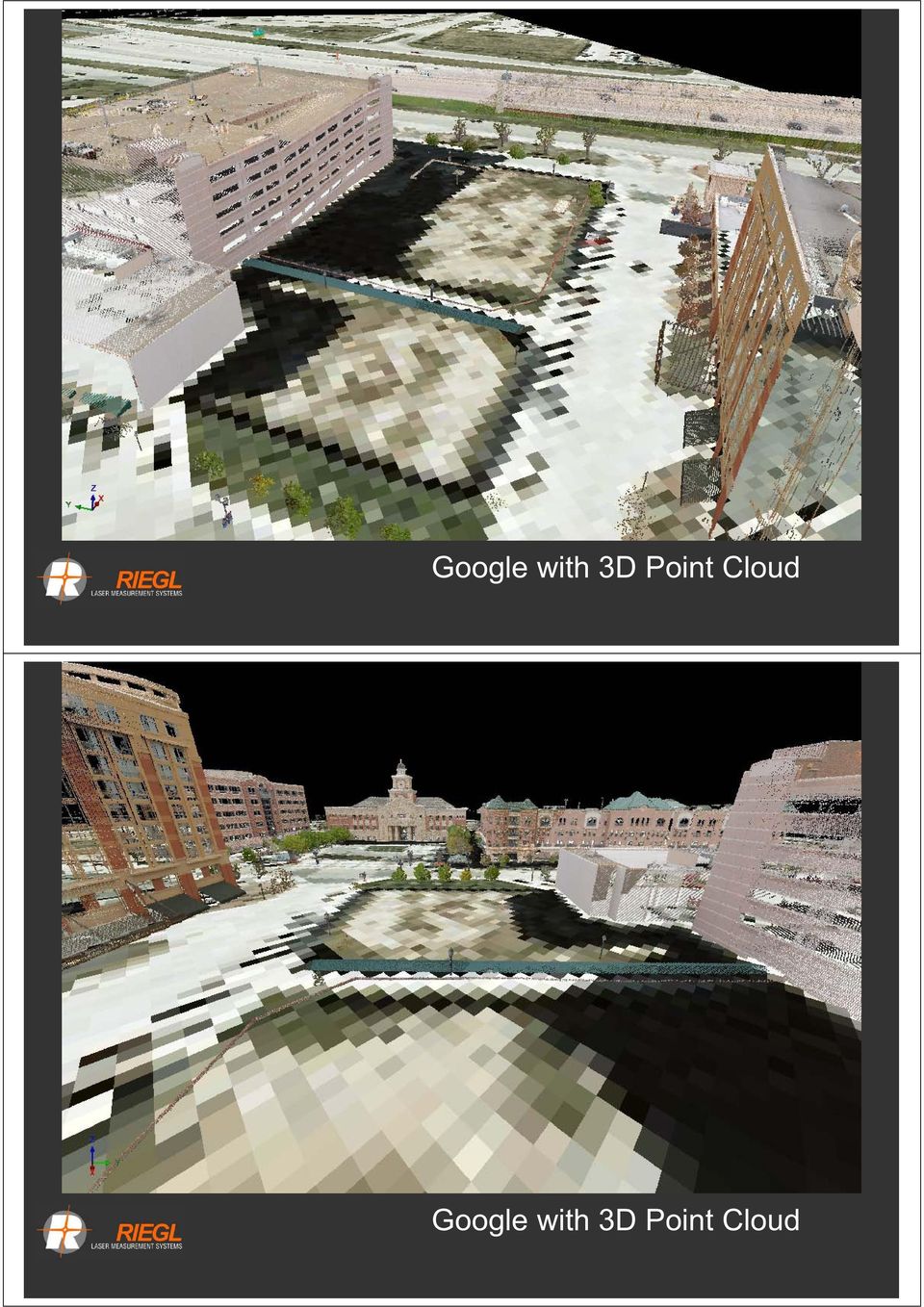
12 Google with 3D Point Cloud Google with 3D Point Cloud
13 Google with 3D Point Cloud Google with 3D Point Cloud
14 Google with 3D Point Cloud Google with 3D Point Cloud
15 Google with 3D Point Cloud

16 Google with 3D Point Cloud 3D Monoplotting Accuracy 3D Laser Scanning & Photogrammetry

17 Multi Image Measurement Measurement in Plane Cylinder and Edege Measurement 3D Intersection with Pointcloud PHIDIAS Measurement Methods Overview Scanner / Camera Positions

18 PHIDIAS 3D Monoplotting PHIDIAS freehand Detail Photograph

19 PHIDIAS 3D Model PHIDIAS Simulation Trajectories

20 PHIDIAS Detail Footprint PHIDIAS Animation

21 Thank you for your attention!
22 Mobile Laser Scanning Anwendungen Oldenburger 3D Tage 2007 Nikolaus Studnicka Peter Rieger Andreas Ullrich RIEGL Laser Measurement Systems GmbH Mobile Laser Scanning Anwendungen Grundlagen Mobile Laser Scanning am Auto (2D Scanner, Japan) Mobile Laser Scanning am Auto (3D Scanner, Österreich) Airborne Laser Scanning kombiniert mit Terrestrischem Laser Scanning (Österreich) Mobile Laser Scanning am Boot (2D Scanner, Frankreich) Inhalt
23 TLS Terrestrisches Laser Scanning MLS Mobiles Laser Scanning ALS Airborne Laser Scanning Datenformat Bild basierend Linien basierend Linien basierend Registrierung Per Reflektoren oder Nutzdaten online per INS/GPS Aufnahme Sensoren wie z.b. Rad Sensor online per INS/GPS Aufnahme der Trajektorie Messentfernung 1m 1000m typ. bis 200m 500m 1500m Registriergenauigkeit typ 5mm typ 2cm (DGPS) typ 10cm (bis 2cm bei ICP auf Referenzmodelle) Aufnahmeart stop-and-go go Einteilung TLS / MLS / ALS TLS Terrestrisches Laser Scanning MLS Mobiles Laser Scanning ALS Airborne Laser Scanning Registrierung mit vielen Reflektoren (per Totalstation ect.) mit einem Reflektor (back sighting) & Eigenposition ohne Reflektoren per ICP (iterative closest point) Algorithmus ect. Aufnahme der Laser Daten inklusive Zeitstempel Aufnahme der Trajektorie (per INS/GPS) Verbesserung der Registrierung durch Ausgleichung an stationär aufgenommenen Referenzobjekten Aufnahme der Laser Daten inklusive Zeitstempel Aufnahme der Trajektorie (per INS/GPS) Verbesserung der Registrierung durch Streifenausgleich: 1. Zur internen Systemkalibrierung (6 Parameter) 2. Nutzdatenverbesserung (3 Translation- & 3 Rotations Parameter je Flugsteifen) 3. Ausrichtung an stationär aufgenommenen Kontrollobjekte Definition Trajektorie: Ort und Orientierung als Funktion der Zeit (zeitdiskret) Registrierung TLS / MLS / ALS
24 MLS System Konfiguration MLS Workflow
25 MLS Trajektorie - Definition MLS Beispieldaten
26 Punktewolkendaten, aufgenommen von einem Helikopter MLS 2D Laser Scanner Q560 am Auto (Japan)
27 Fallbeispiel MLS am Auto GPS Laser Scanner Q560 IMU Applanix Team & System Konfiguration
28 Applanix View of Trajectory RiSCAN PRO View of Trajectory Main Street East Main Street West Street Trajektorie Moving Car Direction y x z Trajektorie
29 0.33m y y x z x z Xsc Ysc Zsc C SOCS IMU T x 0 y T 0 z T 0 x TRA Ximu 0 y Yimu TRA 1 zzimu TRA delta Ximu Rotation Translation Transformation Matrix IMU / Scanner Own Coordinate System Trajectory of the Car Trajektorie
30 Trajectory of the Car & Main Street West MLS Scan Trajectory of the Car & Main Street West & Street MLS Scan
31 Main Street East Trajectory of the Car & Main Street West & Street & Erstes Ziel Full Waveform Analyse
32 Letztes Ziel Full Waveform Analyse Alle anderen Ziele Full Waveform Analyse
33 Erstes & Letztes Ziel Full Waveform Analyse Alle Ziele Full Waveform Analyse
34 Full Waveform Analyse Maximale Reichweite zu Hochspannungleitungen (50kHz)
35 MLS 3D Laser Scanner Z420 am Auto (Österreich) GPS 3D Laser Scanner Z420i Rad Sensor MLS 3D Laser Scanner Z420 am Auto IMU Applanix
36 MLS 3D Laser Scanner Z420 am Auto ALS 2D Laser Scanner Q560 kombiniert mit TLS 3D Laser Scanner Z420 (Österreich)
37 Schlüsselfertiges System für ALS 1-2 Laser Scanner INS/GPS System Mittelformatkamera Flugzeug (DA42) Request for Airborne Laser Scanning Survey GPS Network Hardware Software Survey Planning Aircraft + Training Base Station Network + Support Laser Scanner INS / GPS Subsystems Digital Camera (optional) Data Storage Operator s Workstation Flight Guidance System Control Coverage Monitoring Flight Guidance ALSS Turnkey Solution Data Processing Environment Data Processing Airborne Laser Scanning Data in WGS84 ALS System Komponenten
38 Specifications RIEGL LMS-Q560 Measurement range Ranging accuracy multi-target resolution Measurement rate Scan range Scan speed Synchronization Size / weight Laser safety 30 m m at = 80% 30 m m at = 20% 20 mm down to 0.5 m meas/ss (burst rate) up to meas/ s (average) 45 (up to 60 ) Up to 160 lines / sec GPS PPS & serial IF 560 x 200 x 217 mm / 20 kg Laser class 1 / wavelength near infrared Maximum Measurement Range vs Target Reflectivity and Measurement Rate Laser Scanner Spezifikation RIEGL LMS-Q560 DSM 0.25 m flight path scan line Darstellung der Echosignale pro Scanlinie
39 ALS Fallbeispiel aus dem Paper Full-waveform airborne laser scanning as a tool for archaeological reconnaissance In: Campana S., Forte M. (eds.), FRom Space to Place. Proceedings of the 2nd International Conference on Remote Sensing in Archaeology. BAR International Series 1568, 2006, Autoren: Michael Doneus [michael.doneus@unvie.ac.at] Christian Briese [ cb@ipf@tuwien.ac.at] ALS Fallbeispiel mit Full Waveform DSM ALS Fallbeispiel mit Full Waveform DSM
40 ALS Fallbeispiel mit Full Waveform DSM 3D-Ansicht von runden Wällen- DSM
41 3D-Ansicht von runden Hügelgräber - ungefiltertes DTM 3D-Ansicht von runden Hügelgräber - gefiltertes DTM (Impulsbreite)
42 3D Punktwolke nach Entfernung von Echo Signalen mit großer Impulsbreite in ein Luftbild eingeblendet Runde Hügelgräber - Querschnitt
43 Request Survey Planning Evaluation Execution for Airborne flight actual point height intensity Laser strips density flight color-coding Scanning of lines laser Survey data (DSM) surveying area Beispieldaten Turnkey Solution for Airborne Laser Scanning aircraft air speed laser scanner spatial density, 40 m/s (2 laser 2 x 50 khz 2 x 100 khz 2 x 200 khz PRR storage capacity ranging accuracy geo-referenced accuracy approvals Diamond DA42 MPP 40 m/s - 80 m/s RIEGL LMS-Q560, full waveform capabilities AGL = 500 m 3 meas / m² 1.8 meas / m² 6 meas / m² 3.6 meas / m² 12 meas / m² 7.2 meas / m² > 8 hours of full waveform data recording 2 cm AGL = 800 m 10 cm experimental data: less than 3 cm (1 ) with reference objects, after post-processing certification category EASA part 23 (Europe), FAR23 (USA), enables worldwide operation Spezifikation des ALS Gesamtsystems
44 ALS & TLS Gesamtsystem (11. & ) LOAG Flugplatz Krems Gneixendorf / Österreich
45 LOAG Flugplatz Krems Gneixendorf / Österreich Plane Patches vor dem Streifenausgleich, Punktewoken
46 Plane Patches vor dem Streifenausgleich, schattierte Ansicht von oben Vor simultanem Streifenausgleich
47 Nach simultanem Streifenausgleich und Einbaulage-Kalibrierung Nach simultanem Streifenausgleich und Einbaulage-Kalibrierung
48 TLS (Echtfarbe) kombiniert mit ALS (farbkodiert) 3D CAD Modellierung mithilfe von 3D Monoplotting (Phidias)
49 3D CAD Modell aus TLS und ALS Laser Scandaten Beispiel TLS Scan 3D Modell
50 MLS 2D Laser Scanner Q240 am Boot (Frankreich) MLS am Meßschiff (Hafen von Marseille)
51 GPS 2D Laser Scanner Q240 IMU IXSEA MLS am Meßschiff (Hafen von Marseille) Google Earth: Hafen von Marseille
52 RiSCAN PRO: Hafen von Marseille MLS Meßdaten mit Trajektorie des Meßschiffes
53 MLS Meßdaten mit Trajektorie des Meßschiffes MLS Meßdaten
54 Vielen Dank für Ihre Aufmerksamkeit! Herzlichen Dank für die Kooperation und Zusammenarbeit an Milan Flug GmbH (Frauenkirche) Port of Marseille (Hafen von Marseille)
Mobile Laser Scanning Anwendungen
 Mobile Laser Scanning Anwendungen Oldenburger 3D Tage 2007 Nikolaus Studnicka Peter Rieger Andreas Ullrich RIEGL Laser Measurement Systems GmbH www.riegl.com Mobile Laser Scanning Anwendungen Grundlagen
Mobile Laser Scanning Anwendungen Oldenburger 3D Tage 2007 Nikolaus Studnicka Peter Rieger Andreas Ullrich RIEGL Laser Measurement Systems GmbH www.riegl.com Mobile Laser Scanning Anwendungen Grundlagen
Mobiles Laserscanning für 3D-Stadtmodelle
 Workshop 3D-Stadtmodelle Mobiles Laserscanning für 3D-Stadtmodelle 8. und 9. November 2010 im Universitätsclub Bonn TopScan Gesellschaft zur Erfassung topographischer Information mbh Christian Wever Düsterbergstr.
Workshop 3D-Stadtmodelle Mobiles Laserscanning für 3D-Stadtmodelle 8. und 9. November 2010 im Universitätsclub Bonn TopScan Gesellschaft zur Erfassung topographischer Information mbh Christian Wever Düsterbergstr.
Mobile Laser Scanning Anwendungen
 Mobile Laser Scanning Anwendungen Peter RIEGER, Nikolaus STUDNICKA, Andreas ULLRICH Zusammenfassung Die Kombination moderner, schneller 2D-Laserscanner mit den heute verfügbaren Positions- und Lagemesssystemen
Mobile Laser Scanning Anwendungen Peter RIEGER, Nikolaus STUDNICKA, Andreas ULLRICH Zusammenfassung Die Kombination moderner, schneller 2D-Laserscanner mit den heute verfügbaren Positions- und Lagemesssystemen
RIEGL VMX-250 Mobile Laser Scanning System am Beispiel der Paläste am Canal Grande, Venedig Hamburger Anwenderforum, Juni 2011
 RIEGL VMX-250 Mobile Laser Scanning System am Beispiel der Paläste am Canal Grande, Venedig Hamburger Anwenderforum, Juni 2011 Nikolaus STUDNICKA, Gerald ZACH, Phillipp AMON, Martin PFENNIGBAUER RIEGL
RIEGL VMX-250 Mobile Laser Scanning System am Beispiel der Paläste am Canal Grande, Venedig Hamburger Anwenderforum, Juni 2011 Nikolaus STUDNICKA, Gerald ZACH, Phillipp AMON, Martin PFENNIGBAUER RIEGL
Zukünftige Konzepte zur Optimierung von Trajektorien Drei Ansätze
 Zukünftige Konzepte zur Optimierung von Trajektorien Drei Ansätze DGLR L6.1 Workshop: Bestimmung optimaler Trajektorien im Air Traffic Management, 23.04.2013 Dr. Matthias Poppe, DFS 1.) CATO Decision Support
Zukünftige Konzepte zur Optimierung von Trajektorien Drei Ansätze DGLR L6.1 Workshop: Bestimmung optimaler Trajektorien im Air Traffic Management, 23.04.2013 Dr. Matthias Poppe, DFS 1.) CATO Decision Support
Multirotor UAVs Anwendungen zur Geodatengewinnung
 Anwendungen zur Geodatengewinnung Inhalt Überblick AscTec Geschichte, Produkte, Technik AscTec Falcon Möglichkeiten und Anwendungen Bisherige Projekte zur Geodatengewinnung Ausblick Folie 2 Ascending Technologies
Anwendungen zur Geodatengewinnung Inhalt Überblick AscTec Geschichte, Produkte, Technik AscTec Falcon Möglichkeiten und Anwendungen Bisherige Projekte zur Geodatengewinnung Ausblick Folie 2 Ascending Technologies
Real-Time 3D Model Acquisition
 Seminarvortrag Real-Time 3D Model Acquisition Alexander Barth Nach Folien von Szymon Rusinkiewicz, Olaf Hall-Holt und Marc Levoy Einführung 3D-Scannen 2 Einführung Ziele Hohe Präzision Hohe Geschwindigkeit
Seminarvortrag Real-Time 3D Model Acquisition Alexander Barth Nach Folien von Szymon Rusinkiewicz, Olaf Hall-Holt und Marc Levoy Einführung 3D-Scannen 2 Einführung Ziele Hohe Präzision Hohe Geschwindigkeit
JENOPTIK. Geschwindigkeitsmessungen mit Lasertechnologie. Referent: Wolfgang Seidel
 JENOPTIK Geschwindigkeitsmessungen mit Lasertechnologie Referent: Wolfgang Seidel Jenoptik-Konzern Überblick Konzernstruktur Corporate Center Laser & Materialbearbeitung Optische Systeme Industrielle Messtechnik
JENOPTIK Geschwindigkeitsmessungen mit Lasertechnologie Referent: Wolfgang Seidel Jenoptik-Konzern Überblick Konzernstruktur Corporate Center Laser & Materialbearbeitung Optische Systeme Industrielle Messtechnik
Mobile Mapping. Eine Gegenüberstellung unterschiedlicher Verfahren zur Erfassung von Straßendaten. Christian Wever TopScan GmbH wever@topscan.
 Mobile Mapping Eine Gegenüberstellung unterschiedlicher Verfahren zur Erfassung von Straßendaten Christian Wever TopScan GmbH wever@topscan.de TopScan Gesellschaft zur Erfassung topographischer Information
Mobile Mapping Eine Gegenüberstellung unterschiedlicher Verfahren zur Erfassung von Straßendaten Christian Wever TopScan GmbH wever@topscan.de TopScan Gesellschaft zur Erfassung topographischer Information
Tuning des Weblogic /Oracle Fusion Middleware 11g. Jan-Peter Timmermann Principal Consultant PITSS
 Tuning des Weblogic /Oracle Fusion Middleware 11g Jan-Peter Timmermann Principal Consultant PITSS 1 Agenda Bei jeder Installation wiederkehrende Fragen WievielForms Server braucheich Agenda WievielRAM
Tuning des Weblogic /Oracle Fusion Middleware 11g Jan-Peter Timmermann Principal Consultant PITSS 1 Agenda Bei jeder Installation wiederkehrende Fragen WievielForms Server braucheich Agenda WievielRAM
TopScan GmbH. Mobile Laser Scanning
 TopScan GmbH Mobile Laser Scanning Ein neues Verfahren zur Bestandsaufnahme TopScan Gesellschaft zur Erfassung topographischer Information mbh Christian Wever Düsterbergstr. 5 48432 Rheine Rheine, 2003
TopScan GmbH Mobile Laser Scanning Ein neues Verfahren zur Bestandsaufnahme TopScan Gesellschaft zur Erfassung topographischer Information mbh Christian Wever Düsterbergstr. 5 48432 Rheine Rheine, 2003
Applying Pléiades in the ASAP project HighSens
 Applying Pléiades in the ASAP project HighSens Highly versatile, new satellite Sensor applications for the Austrian market and International Development (Contract number: 833435) Dr. Eva Haas, GeoVille
Applying Pléiades in the ASAP project HighSens Highly versatile, new satellite Sensor applications for the Austrian market and International Development (Contract number: 833435) Dr. Eva Haas, GeoVille
Integration von statischen, luft- und fahrzeuggestützten LiDAR-Aufnahmen zur hochgenauen Kartierung von Infrastrukturobjekten
 Integration von statischen, luft- und fahrzeuggestützten LiDAR-Aufnahmen zur hochgenauen Kartierung von Infrastrukturobjekten David Ulrich Helimap System AG Übersicht Helimap System AG Problematik Autobahnvermessung
Integration von statischen, luft- und fahrzeuggestützten LiDAR-Aufnahmen zur hochgenauen Kartierung von Infrastrukturobjekten David Ulrich Helimap System AG Übersicht Helimap System AG Problematik Autobahnvermessung
Was ist das i3mainz?
 Laserscanning zur drei- dimensionalen Objekterfassung: Grundlagen und Anwendungen Andreas Marbs i3mainz - Institut für Raumbezogene Informations- und Messtechnik FH Mainz - University of Applied Sciences
Laserscanning zur drei- dimensionalen Objekterfassung: Grundlagen und Anwendungen Andreas Marbs i3mainz - Institut für Raumbezogene Informations- und Messtechnik FH Mainz - University of Applied Sciences
Eigenschaften und Verarbeitung topobathymetrischer. Wellenform zum DGM
 Eigenschaften und Verarbeitung topobathymetrischer Punktwolken Von der Gottfried Mandlburger, Martin Wieser, Philipp Glira, Andreas Roncat und Norbert Pfeifer gottfried.mandlburger@geo.tuwien.ac.at Technische
Eigenschaften und Verarbeitung topobathymetrischer Punktwolken Von der Gottfried Mandlburger, Martin Wieser, Philipp Glira, Andreas Roncat und Norbert Pfeifer gottfried.mandlburger@geo.tuwien.ac.at Technische
3D-Erfassung, Modellierung & Visualisierung des Kaiserdoms zu Königslutter durch terrestrisches Laserscanning 1/ 30
 Th. Kersten, M. Lindstaedt & K. Mechelke 3D-Erfassung, Modellierung & Visualisierung des Kaiserdoms zu Königslutter durch terrestrisches Laserscanning 1/ 30 4. er Anwenderforum für Terrestrisches Laserscanning
Th. Kersten, M. Lindstaedt & K. Mechelke 3D-Erfassung, Modellierung & Visualisierung des Kaiserdoms zu Königslutter durch terrestrisches Laserscanning 1/ 30 4. er Anwenderforum für Terrestrisches Laserscanning
Using TerraSAR-X data for mapping of damages in forests caused by the pine sawfly (Dprion pini) Dr. Klaus MARTIN klaus.martin@slu-web.
 Dr. Klaus MARTIN klaus.martin@slu-web.") Using TerraSAR-X data for mapping of damages in forests caused by the pine sawfly (Dprion pini) Dr. Klaus MARTIN klaus.martin@slu-web.de Damages caused by Diprion pini Endangered Pine Regions in Germany
Using TerraSAR-X data for mapping of damages in forests caused by the pine sawfly (Dprion pini) Dr. Klaus MARTIN klaus.martin@slu-web.de Damages caused by Diprion pini Endangered Pine Regions in Germany
Erfahrungen mit einem 3D-Laserscanning- System bei der Erfassung einer Industrieanlage und des Lübecker Holstentores
 Hamburger Anwenderforum Terrestrisches Laserscanning 2005 Erfahrungen mit einem 3D-Laserscanning- System bei der Erfassung einer Industrieanlage und des Lübecker Holstentores Diplomarbeit im Sommersemester
Hamburger Anwenderforum Terrestrisches Laserscanning 2005 Erfahrungen mit einem 3D-Laserscanning- System bei der Erfassung einer Industrieanlage und des Lübecker Holstentores Diplomarbeit im Sommersemester
Laserscanning. Ingenieurdienstleistung nach Maß.
 Ingenieurdienstleistung nach Maß. Ist die Modellierung eines Pumpwerkes für die Generierung von 2D-Schnittplänen wirtschaftlich? Kati Kreher 2. Hamburger Anwenderforum Terrestrisches Laserscanning 2007
Ingenieurdienstleistung nach Maß. Ist die Modellierung eines Pumpwerkes für die Generierung von 2D-Schnittplänen wirtschaftlich? Kati Kreher 2. Hamburger Anwenderforum Terrestrisches Laserscanning 2007
Scalypso - 3D-Laserscandaten effektiv auswerten
 Scalypso - 3D-Laserscandaten effektiv auswerten IB Dr. König Kopernikusstraße 2 14482 Potsdam Denkmal Tiefbau Präzision Anlagenbau 2-5 mm Entfernung 0.1 mm long distance Tachymetrie 10 max. 40 m midrange
Scalypso - 3D-Laserscandaten effektiv auswerten IB Dr. König Kopernikusstraße 2 14482 Potsdam Denkmal Tiefbau Präzision Anlagenbau 2-5 mm Entfernung 0.1 mm long distance Tachymetrie 10 max. 40 m midrange
Westenberg Wind Tunnels
 MiniAir20 Hand measurement device for flow, humidity and temperature The hand measurement device MiniAir20 is used for the acquisition of temperature, relative humidity, revolution and flow velocity such
MiniAir20 Hand measurement device for flow, humidity and temperature The hand measurement device MiniAir20 is used for the acquisition of temperature, relative humidity, revolution and flow velocity such
Straumann CARES Visual 8.5.1
 Straumann CARES Visual 8.5.1 Software Update What s New Software Version 8.5.1.28615 Release Datum 21.Oktober, 2013 Beschreibung Optimierterung des IO Workflows (itero by Aligned Technology) und Korrektur
Straumann CARES Visual 8.5.1 Software Update What s New Software Version 8.5.1.28615 Release Datum 21.Oktober, 2013 Beschreibung Optimierterung des IO Workflows (itero by Aligned Technology) und Korrektur
Digitale Luftbildkameras
 Digitale Luftbildkameras - Herausforderung und Chance - Gerhard Lauenroth Vertriebsleiter Deutschland High Speed / High Tech - Herausforderung und Chance - Einführung Übersicht Digitale Kameras Digitale
Digitale Luftbildkameras - Herausforderung und Chance - Gerhard Lauenroth Vertriebsleiter Deutschland High Speed / High Tech - Herausforderung und Chance - Einführung Übersicht Digitale Kameras Digitale
Ein virtueller Klon für Helgolands Lange Anna durch terrestrisches Laserscanning
 Hamburger Anwenderforum Terrestrisches Laserscanning, 23.06.2005 Ein virtueller Klon für Helgolands Lange Anna durch terrestrisches Laserscanning Maren Lindstaedt, Thomas Kersten HAW Hamburg, Fachbereich
Hamburger Anwenderforum Terrestrisches Laserscanning, 23.06.2005 Ein virtueller Klon für Helgolands Lange Anna durch terrestrisches Laserscanning Maren Lindstaedt, Thomas Kersten HAW Hamburg, Fachbereich
EEX Kundeninformation 2007-09-05
 EEX Eurex Release 10.0: Dokumentation Windows Server 2003 auf Workstations; Windows Server 2003 Service Pack 2: Information bezüglich Support Sehr geehrte Handelsteilnehmer, Im Rahmen von Eurex Release
EEX Eurex Release 10.0: Dokumentation Windows Server 2003 auf Workstations; Windows Server 2003 Service Pack 2: Information bezüglich Support Sehr geehrte Handelsteilnehmer, Im Rahmen von Eurex Release
Möglichkeiten und Besonderheiten des Flugdienstes swisstopo Possibilités et particularités du service de vol swisstopo
 Bilddaten und Höhenmodelle Möglichkeiten und Besonderheiten des Flugdienstes swisstopo Possibilités et particularités du service de vol swisstopo Hans Peter Gautschi Möglichkeiten Possibilités Twin Otter
Bilddaten und Höhenmodelle Möglichkeiten und Besonderheiten des Flugdienstes swisstopo Possibilités et particularités du service de vol swisstopo Hans Peter Gautschi Möglichkeiten Possibilités Twin Otter
3D Roboter Vision Innovativ durch integrierte Technologie FANUC TIM JUERGENS
 FACTORY AUTOMATION NUMERICAL CONTROL 3D Roboter Vision Innovativ durch integrierte Technologie 2 Inhalt Fanuc Deutschland GmbH Robotics Award 2014 3D Area Sensor Beladen von 3 Werkzeugmaschinen mit Robotern
FACTORY AUTOMATION NUMERICAL CONTROL 3D Roboter Vision Innovativ durch integrierte Technologie 2 Inhalt Fanuc Deutschland GmbH Robotics Award 2014 3D Area Sensor Beladen von 3 Werkzeugmaschinen mit Robotern
Aktuelle Anwendung von Fernerkundungsdaten
 Literaturhinweis: ALBERTZ, Jörg (2007): Einführung in die Fernerkundung, Grundlagen der Interpretation von Luft- und Satellitenbildern, 3. Auflage, Wisssenschaftliche Buchgemeinschaft Darmstadt Grundlagen
Literaturhinweis: ALBERTZ, Jörg (2007): Einführung in die Fernerkundung, Grundlagen der Interpretation von Luft- und Satellitenbildern, 3. Auflage, Wisssenschaftliche Buchgemeinschaft Darmstadt Grundlagen
How to make a PIXAR movie. Motion Capturing. computer graphics & visualization
 How to make a PIXAR movie Inhalt Geschichte des s Anwendungen Typen der Motion Capture Systeme MoCap Pipeline Zusammenfassung und Ausblick Definition Motion capture is the process of recording a live motion
How to make a PIXAR movie Inhalt Geschichte des s Anwendungen Typen der Motion Capture Systeme MoCap Pipeline Zusammenfassung und Ausblick Definition Motion capture is the process of recording a live motion
Location based Content Delivery oder was das ibeacon-rudel im Zoo zu suchen hat
 Location based Content Delivery oder was das ibeacon-rudel im Zoo zu suchen hat 12. September 2014 Übersicht Assense! Der Zoo!! Grundlagen! Beacon Central! Zusammenfassung 2 Assense 3 Über Assense ca.
Location based Content Delivery oder was das ibeacon-rudel im Zoo zu suchen hat 12. September 2014 Übersicht Assense! Der Zoo!! Grundlagen! Beacon Central! Zusammenfassung 2 Assense 3 Über Assense ca.
Cleanroom Fog Generators Volcano VP 12 + VP 18
 Cleanroom Fog Generators Volcano VP 12 + VP 18 Description & Functional Principle (Piezo Technology) Cleanrooms are dynamic systems. People and goods are constantly in motion. Further installations, production
Cleanroom Fog Generators Volcano VP 12 + VP 18 Description & Functional Principle (Piezo Technology) Cleanrooms are dynamic systems. People and goods are constantly in motion. Further installations, production
UAV-Datenprozessierung. Gabriela Apfl MFB-GeoConsulting
 UAV-Datenprozessierung Automatisch einfach zuverlässig Gabriela Apfl MFB-GeoConsulting MFB-GeoConsulting Steckbrief Seit 16 Jahren erfolgreich auf dem Geoinformatik-Markt. Hexagon Geospatial Channel Partner
UAV-Datenprozessierung Automatisch einfach zuverlässig Gabriela Apfl MFB-GeoConsulting MFB-GeoConsulting Steckbrief Seit 16 Jahren erfolgreich auf dem Geoinformatik-Markt. Hexagon Geospatial Channel Partner
Update / Inbetriebnahme domovea Server. Update/Inbetriebnahme domovea Server Technische Änderungen vorbehalten
 Update / Inbetriebnahme domovea Server 1 Vor der Inbetriebnahme Es muss sicher gestellt sein, dass Microsoft.Net Framework 4.0 installiert ist (bei Windows 7 bereits integriert). Achten Sie auf die richtige
Update / Inbetriebnahme domovea Server 1 Vor der Inbetriebnahme Es muss sicher gestellt sein, dass Microsoft.Net Framework 4.0 installiert ist (bei Windows 7 bereits integriert). Achten Sie auf die richtige
3D outdoor Laser Scanner zur Personenzählung. PAC100-90-Y-n*1,5_D/14. Features. Anwendungsvorteile
 PAC100-90-Y-n*1,5 3D outdoor Laser Scanner zur Personenzählung Features 3D Range Image mit 4 Scanebenen Winkel zwischen Scanebenen: Außen 1,5 *n Innen 0,5 *n; mit n = 1,2,3 Punkte pro Scanebene: 500 Punkte
PAC100-90-Y-n*1,5 3D outdoor Laser Scanner zur Personenzählung Features 3D Range Image mit 4 Scanebenen Winkel zwischen Scanebenen: Außen 1,5 *n Innen 0,5 *n; mit n = 1,2,3 Punkte pro Scanebene: 500 Punkte
ITSM (BOX & CONSULTING) Christian Hager, MSc
 Christian Hager, MSc") ITSM (BOX & CONSULTING) Christian Hager, MSc INHALT Ausgangssituation ITSM Consulting ITSM Box Zentrales Anforderungsmanagement Beispielhafter Zeitplan Nutzen von ITSM Projekten mit R-IT Zusammenfassung
ITSM (BOX & CONSULTING) Christian Hager, MSc INHALT Ausgangssituation ITSM Consulting ITSM Box Zentrales Anforderungsmanagement Beispielhafter Zeitplan Nutzen von ITSM Projekten mit R-IT Zusammenfassung
Mobile JENCOLOR Evaluation Kits with Windows 8 Smart PC for Color Measurement Applications
 Mobile JENCOLOR Evaluation Kits with Windows 8 Smart PC for Color Measurement Applications Paul-Gerald Dittrich, Fred Grunert, Dietrich Hofmann MAZeT GmbH Firmenpräsentation Version xx 1 Content 1. Mobile
Mobile JENCOLOR Evaluation Kits with Windows 8 Smart PC for Color Measurement Applications Paul-Gerald Dittrich, Fred Grunert, Dietrich Hofmann MAZeT GmbH Firmenpräsentation Version xx 1 Content 1. Mobile
DGPS Dienst. der WSV FACHSTELLE DER WSV FÜR VERKEHRSTECHNIKEN
 WASSER- UND SCHIFFFAHRTSVERWALTUNG DES BUNDES FACHSTELLE DER WSV DGPS Dienst der WSV Technische Daten, Systemparameter und Aufbau der DGPS Referenzstationen nach IALA Standard Autor: Dipl.-Ing. (FH) Michael
WASSER- UND SCHIFFFAHRTSVERWALTUNG DES BUNDES FACHSTELLE DER WSV DGPS Dienst der WSV Technische Daten, Systemparameter und Aufbau der DGPS Referenzstationen nach IALA Standard Autor: Dipl.-Ing. (FH) Michael
HafenCity Universität Hamburg 2009 Anwender Forum 16 Juni 2009
 1 Dienstag, 7. Juli 2009 Referenzen 3D Laser Scanning im Anlagenbau Gegründet: 1994 Standorte Berlin Köthen 30 Mitarbeiter Engineering - Anlagenbau Laser Scanning Rohrleitungstechnik Stahlbau Industrieanlagen
1 Dienstag, 7. Juli 2009 Referenzen 3D Laser Scanning im Anlagenbau Gegründet: 1994 Standorte Berlin Köthen 30 Mitarbeiter Engineering - Anlagenbau Laser Scanning Rohrleitungstechnik Stahlbau Industrieanlagen
Meteorological measurements at the Offshore Platform FINO 2 - new insights -
 FINO 2011 Conference May 11 th 2011, Hamburg, Germany Meteorological measurements at the Offshore Platform FINO 2 - new insights - Dipl.-Geoök. Stefan Müller, Dipl.-Ing Joachim Schwabe Content 1. FINO
FINO 2011 Conference May 11 th 2011, Hamburg, Germany Meteorological measurements at the Offshore Platform FINO 2 - new insights - Dipl.-Geoök. Stefan Müller, Dipl.-Ing Joachim Schwabe Content 1. FINO
Subsysteme: Software für Satellitensysteme
 Subsysteme: Software für Satellitensysteme B. Brünjes DLR Raumfahrtindustrietage, Bremen, 12./13. Juni 2008 Schwerpunkte der Softwareentwicklung bei OHB On-board Software für Satelliten Bodenkontroll-Software
Subsysteme: Software für Satellitensysteme B. Brünjes DLR Raumfahrtindustrietage, Bremen, 12./13. Juni 2008 Schwerpunkte der Softwareentwicklung bei OHB On-board Software für Satelliten Bodenkontroll-Software
GA-LCD-Monitor RTR-SET PV-Vision
 GA-LCD-Monitor RTR-SET PV-Vision GA-LCD-Monitor RTR-SET PV-Vision Artikelnummer 510 81xx (xx für Zoll z.b. 46) (LOCAL-SET) Item number 510 81xx (xx for Zoll eg 46) (LOCAL-SET) Anzeigentechnik: LCD, 1920
GA-LCD-Monitor RTR-SET PV-Vision GA-LCD-Monitor RTR-SET PV-Vision Artikelnummer 510 81xx (xx für Zoll z.b. 46) (LOCAL-SET) Item number 510 81xx (xx for Zoll eg 46) (LOCAL-SET) Anzeigentechnik: LCD, 1920
IT-Beratung: Vom Geschäftsprozess zur IT-Lösung
 Ralf Heib Senior Vice-President Geschäftsleitung DACH IT-Beratung: Vom Geschäftsprozess zur IT-Lösung www.ids-scheer.com Wofür steht IDS Scheer? Wir machen unsere Kunden in ihrem Geschäft erfolgreicher.
Ralf Heib Senior Vice-President Geschäftsleitung DACH IT-Beratung: Vom Geschäftsprozess zur IT-Lösung www.ids-scheer.com Wofür steht IDS Scheer? Wir machen unsere Kunden in ihrem Geschäft erfolgreicher.
Seite - 1 - 3. Wireless Distribution System (Routing / Bridging) 3.1 Einleitung
 3.1 Einleitung") 3. Wireless Distribution System (Routing / ) 3.1 Einleitung Im Folgenden wird die Konfiguration des Wireless Distribution Modus gezeigt. Sie nutzen zwei Access Points um eine größere Strecke über Funk
3. Wireless Distribution System (Routing / ) 3.1 Einleitung Im Folgenden wird die Konfiguration des Wireless Distribution Modus gezeigt. Sie nutzen zwei Access Points um eine größere Strecke über Funk
Bewertungsbogen. Please find the English version of the evaluation form at the back of this form
 Bewertungsbogen Please find the English version of the evaluation form at the back of this form Vielen Dank für Ihre Teilnahme an der BAI AIC 2015! Wir sind ständig bemüht, unsere Konferenzreihe zu verbessern
Bewertungsbogen Please find the English version of the evaluation form at the back of this form Vielen Dank für Ihre Teilnahme an der BAI AIC 2015! Wir sind ständig bemüht, unsere Konferenzreihe zu verbessern
Anbindung LMS an Siemens S7. Information
 Datum: 18.09.2003 Status: Autor: Datei: Lieferzustand Rödenbeck Dokument1 Versio n Änderung Name Datum 1.0 Erstellt TC 18.09.03 Seite 1 von 1 Inhalt 1 Allgemein...3 2 Komponenten...3 3 Visualisierung...4
Datum: 18.09.2003 Status: Autor: Datei: Lieferzustand Rödenbeck Dokument1 Versio n Änderung Name Datum 1.0 Erstellt TC 18.09.03 Seite 1 von 1 Inhalt 1 Allgemein...3 2 Komponenten...3 3 Visualisierung...4
Atline Inspection of Casting Production Process at Volkswagen using VG Inline
 Atline Inspection of Casting Production Process at Volkswagen using VG Inline Atline Inspection of Casting Production Process at Volkswagen using VG Inline Authors: Dr.-Ing. Raimund Rösch, Frank Jeltsch
Atline Inspection of Casting Production Process at Volkswagen using VG Inline Atline Inspection of Casting Production Process at Volkswagen using VG Inline Authors: Dr.-Ing. Raimund Rösch, Frank Jeltsch
Datenblatt. Remote-I/O - u-remote UR20-4AO-UI or 4-wire connection; 16-bit resolution; 4 outputs
 2- or 4-wire connection; 16-bit resolution; 4 outputs The analogue output module controls up to 4 analogue actuators with +/-10 V, +/-5 V, 0...10 V, 0...5 V, 2...10 V, 1...5 V, 0...20 ma or 4...20 ma with
2- or 4-wire connection; 16-bit resolution; 4 outputs The analogue output module controls up to 4 analogue actuators with +/-10 V, +/-5 V, 0...10 V, 0...5 V, 2...10 V, 1...5 V, 0...20 ma or 4...20 ma with
Auszug aus der netzbetriebenen Multimotor-Serie
 Drehantrieb MU 010 Max. zentrische Belastung 1 kg bei 1 bis 5 UpM. Je größer das Objekt und je schneller der Motor desto geringer die mögliche Belastung. Rotating Motor MU 010 Max. centric load 1 kg /
Drehantrieb MU 010 Max. zentrische Belastung 1 kg bei 1 bis 5 UpM. Je größer das Objekt und je schneller der Motor desto geringer die mögliche Belastung. Rotating Motor MU 010 Max. centric load 1 kg /
Workflows, Ansprüche und Grenzen der GNSS- Datenerfassung im Feld
 Workflows, Ansprüche und Grenzen der GNSS- Datenerfassung im Feld Alexander Fischer Senior Application Engineer Asset Collection & GIS 1 Leica Zeno GIS Agenda Erfassung im Feld VS Erfassung im Office Validierung
Workflows, Ansprüche und Grenzen der GNSS- Datenerfassung im Feld Alexander Fischer Senior Application Engineer Asset Collection & GIS 1 Leica Zeno GIS Agenda Erfassung im Feld VS Erfassung im Office Validierung
Maß halten auf der Großbaustelle mit.net
 Maß halten auf der Großbaustelle mit.net Regional Area Reference Networks von ALLSAT Produktvorstellung und Applikationen Dirk Hermsmeyer Folie 1 Einleitung Große Bau- und Entwicklungsprojekte erfordern
Maß halten auf der Großbaustelle mit.net Regional Area Reference Networks von ALLSAT Produktvorstellung und Applikationen Dirk Hermsmeyer Folie 1 Einleitung Große Bau- und Entwicklungsprojekte erfordern
miditech 4merge 4-fach MIDI Merger mit :
 miditech 4merge 4-fach MIDI Merger mit : 4 x MIDI Input Port, 4 LEDs für MIDI In Signale 1 x MIDI Output Port MIDI USB Port, auch für USB Power Adapter Power LED und LOGO LEDs Hochwertiges Aluminium Gehäuse
miditech 4merge 4-fach MIDI Merger mit : 4 x MIDI Input Port, 4 LEDs für MIDI In Signale 1 x MIDI Output Port MIDI USB Port, auch für USB Power Adapter Power LED und LOGO LEDs Hochwertiges Aluminium Gehäuse
TECHNISCHE MITTEILUNG VTM SERVICE BULLETIN NO. MSB
 Lettenbachstrasse 9 Seite / Page 1 von / of 5 TECHNISCHE MITTEILUNG VTM 315-68 SERVICE BULLETIN NO. MSB 315-68 I. TECHNISCHE DETAILS / TECHNICAL DETAILS 1.1 Kategorie / Category: Vorgeschrieben / Mandatory
Lettenbachstrasse 9 Seite / Page 1 von / of 5 TECHNISCHE MITTEILUNG VTM 315-68 SERVICE BULLETIN NO. MSB 315-68 I. TECHNISCHE DETAILS / TECHNICAL DETAILS 1.1 Kategorie / Category: Vorgeschrieben / Mandatory
IFR IFR IFR IFR 08.10.2013 AIRWATCH AIRWATCH. Ing. Feischl Richard. Katastrophensommer 2013
 AIRWATCH Workshop Assistenzleistungen bei Großschadenslagen Tulln 09.10.2013 Ing. Feischl Richard Sicherheitsfachkraft & Krisenmanagement Training Consultant Security-Safety & Disastermanagement Training
AIRWATCH Workshop Assistenzleistungen bei Großschadenslagen Tulln 09.10.2013 Ing. Feischl Richard Sicherheitsfachkraft & Krisenmanagement Training Consultant Security-Safety & Disastermanagement Training
Software Defined Storage Storage Transformation in der Praxis. April 2015 22
 Software Defined Storage Storage Transformation in der Praxis Copyright 2014 EMC Corporation. All rights reserved. April 2015 22 TRANSFORMATION DER IT ZUM SERVICE PROVIDER STORAGE AS A SERVICE HYBRID CLOUD
Software Defined Storage Storage Transformation in der Praxis Copyright 2014 EMC Corporation. All rights reserved. April 2015 22 TRANSFORMATION DER IT ZUM SERVICE PROVIDER STORAGE AS A SERVICE HYBRID CLOUD
LRU 2000 SLX RFID Gate. Long Range UHF RFID Reader. Aktuelle Konfiguration des Reader
 LRU 2000 SLX RFID Gate Long Range UHF RFID Reader Aktuelle Konfiguration des Reader Version 1.1 Juni 2009 1. Vorbemerkungen 3 1.1. Hinweise 3 2. Aktuelle Readerparameter 4 2.1. CFG0: Access Control 4 2.2.
LRU 2000 SLX RFID Gate Long Range UHF RFID Reader Aktuelle Konfiguration des Reader Version 1.1 Juni 2009 1. Vorbemerkungen 3 1.1. Hinweise 3 2. Aktuelle Readerparameter 4 2.1. CFG0: Access Control 4 2.2.
creative Factory GmbH
 Micro compact car smart gmbh smart forfour series w454 Visualization Embeded into the design team of MCC Smart our team was responsible for Class-A surface modelling and for setup of the visible interior
Micro compact car smart gmbh smart forfour series w454 Visualization Embeded into the design team of MCC Smart our team was responsible for Class-A surface modelling and for setup of the visible interior
Neue Technologien in der Praxis
 Neue Technologien in der Praxis Alexander Zahn Head of Sales DESKO GmbH VERSCHIEDENSTE TECHNOLOGIEN ibeacon Technik: Bluetooth Anwendung: zb POS, Passenger Flow Control, Passenger Information RFID & NFC
Neue Technologien in der Praxis Alexander Zahn Head of Sales DESKO GmbH VERSCHIEDENSTE TECHNOLOGIEN ibeacon Technik: Bluetooth Anwendung: zb POS, Passenger Flow Control, Passenger Information RFID & NFC
Folie 1. 60 Jahre Qualitätsmanagement in der Luftrettung. Ernst Kohler. CEO Rega. 12. Juni 2013. Universität Basel. Rega
 Folie 1 60 Jahre Qualitätsmanagement in der Luftrettung Ernst Kohler CEO Rega 12. Juni 2013 Universität Basel Agenda Folie 2 o Facts & Figures (2012) o Weshalb ist ein QM wichtig für die Rega? o Massnahmen
Folie 1 60 Jahre Qualitätsmanagement in der Luftrettung Ernst Kohler CEO Rega 12. Juni 2013 Universität Basel Agenda Folie 2 o Facts & Figures (2012) o Weshalb ist ein QM wichtig für die Rega? o Massnahmen
SanStore: Kurzanleitung / SanStore: Quick reference guide
 SanStore Rekorder der Serie MM, MMX, HM und HMX Datenwiedergabe und Backup Datenwiedergabe 1. Drücken Sie die Time Search-Taste auf der Fernbedienung. Hinweis: Falls Sie nach einem Administrator-Passwort
SanStore Rekorder der Serie MM, MMX, HM und HMX Datenwiedergabe und Backup Datenwiedergabe 1. Drücken Sie die Time Search-Taste auf der Fernbedienung. Hinweis: Falls Sie nach einem Administrator-Passwort
Big Data Projekte richtig managen!
 Big Data Projekte richtig managen! Stuttgart, Oktober 2014 Praktische Herausforderungen eines Big Data Projektes Definition: Was ist Big Data? Big data is a collection of data sets so large and comple
Big Data Projekte richtig managen! Stuttgart, Oktober 2014 Praktische Herausforderungen eines Big Data Projektes Definition: Was ist Big Data? Big data is a collection of data sets so large and comple
European Aviation Safety Agency
 European Aviation Safety Agency EASA TYPE-CERTIFICATE DATA SHEET Number : P.502 Issue : 01 Date : 09 March 2010 Type : GEFA-Flug GmbH Models Helix H50F List of effective Pages: Page 1 2 3 4 5 Issue 1 1
European Aviation Safety Agency EASA TYPE-CERTIFICATE DATA SHEET Number : P.502 Issue : 01 Date : 09 March 2010 Type : GEFA-Flug GmbH Models Helix H50F List of effective Pages: Page 1 2 3 4 5 Issue 1 1
Consulting Lagerung Software Dienstleistungen. Training. Trägerelemente
 TM Consulting Lagerung Software Dienstleistungen Training Trägerelemente Hinter dem ruhigen Erscheinungsbild dieser Schrankreihe verbirgt sich eine funktionelle Ausstattung mit endlosen Möglichkeiten,
TM Consulting Lagerung Software Dienstleistungen Training Trägerelemente Hinter dem ruhigen Erscheinungsbild dieser Schrankreihe verbirgt sich eine funktionelle Ausstattung mit endlosen Möglichkeiten,
GEOSNOW. Cliquez et modifiez le titre. Cliquez pour modifier les styles du texte du masque. Deuxième niveau. Troisième niveau
 GEOSNOW Cliquez et modifiez le titre Verwaltung der Pisten mit Georadar und GPS V.21 50-50% - Erste Tests in 2006 - Installation in Verbier in 2007 - Ab 2008 weitere Stationen du für masque die künstliche
GEOSNOW Cliquez et modifiez le titre Verwaltung der Pisten mit Georadar und GPS V.21 50-50% - Erste Tests in 2006 - Installation in Verbier in 2007 - Ab 2008 weitere Stationen du für masque die künstliche
I-Energieversorgung I-Power Supply
 F Seite 1 page 1 1) Pneumatisch a. Stellantriebe mit Membrane finden ihren Einsatz da, wo kleine Stellkräfte ausreichen. Der pneumatische Stellantrieb ist direkt in Kompaktbauweise mit dem Stellventil
F Seite 1 page 1 1) Pneumatisch a. Stellantriebe mit Membrane finden ihren Einsatz da, wo kleine Stellkräfte ausreichen. Der pneumatische Stellantrieb ist direkt in Kompaktbauweise mit dem Stellventil
Stand und Entwicklungsperspektiven 3D Laser Scanning. Thomas Schock Leica Geosystems GmbH, München
 Stand und Entwicklungsperspektiven 3D Laser Scanning Thomas Schock Leica Geosystems GmbH, München Stand und Entwicklungsperspektiven Agenda Merkmale des 3D Laser Scanning Aktuelle Entwicklungen Hard- und
Stand und Entwicklungsperspektiven 3D Laser Scanning Thomas Schock Leica Geosystems GmbH, München Stand und Entwicklungsperspektiven Agenda Merkmale des 3D Laser Scanning Aktuelle Entwicklungen Hard- und
Neue Möglichkeiten für Ihr Rechenzentrum
 Neue Möglichkeiten für Ihr Rechenzentrum Microsoft Azure Thomas Lichtenstern Technologieberater Microsoft Deutschland GmbH Doris Franke Technologieberaterin Microsoft Deutschland GmbH Huge infrastructure
Neue Möglichkeiten für Ihr Rechenzentrum Microsoft Azure Thomas Lichtenstern Technologieberater Microsoft Deutschland GmbH Doris Franke Technologieberaterin Microsoft Deutschland GmbH Huge infrastructure
Optech Lynx Setzt StandaRdS einfach und genial
 Optech Lynx high-speed-messung von jedem fahrzeug aus Setzt Standards Der LYNX Mobile Mapper definiert den Standard in der Mobile-Mapping-Technologie mit der Erstellung millimetergenauer Punktwolken und
Optech Lynx high-speed-messung von jedem fahrzeug aus Setzt Standards Der LYNX Mobile Mapper definiert den Standard in der Mobile-Mapping-Technologie mit der Erstellung millimetergenauer Punktwolken und
FRÄSEN & SCHLEIFEN MATERIAL. Sie wählen wir integrieren CAM SCANNEN CAD
 FRÄSEN & SCHLEIFEN MATERIAL CAM wir integrieren CAD SCANNEN // Kompetenz // Entwicklung // Herstellung // Integration Das noch junge Unternehmen pritidenta hat das Ziel, sich als Wegbereiter und Vordenker
FRÄSEN & SCHLEIFEN MATERIAL CAM wir integrieren CAD SCANNEN // Kompetenz // Entwicklung // Herstellung // Integration Das noch junge Unternehmen pritidenta hat das Ziel, sich als Wegbereiter und Vordenker
buildm Erarbeitung eines deskriptiven Metadatenschemas für digitale Gebäudeinformationen im EU-Projekt DURAARK
 buildm Erarbeitung eines deskriptiven Metadatenschemas für digitale Gebäudeinformationen im EU-Projekt DURAARK Konferenz Langzeitzugriff auf Sammlungs- und Multimediadaten Berlin, 25. Juni 2015 Michael
buildm Erarbeitung eines deskriptiven Metadatenschemas für digitale Gebäudeinformationen im EU-Projekt DURAARK Konferenz Langzeitzugriff auf Sammlungs- und Multimediadaten Berlin, 25. Juni 2015 Michael
Flugsicherheit Operationelle Risiken einer Airline managen Deutsche Lufthansa AG
 Flugsicherheit Operationelle Risiken einer Airline managen Deutsche Lufthansa AG Jochen Mickel Flugbetriebskontrolle Deutsche Lufthansa AG Frankfurt, 13. Juni 2006 Gliederung 1. Was ist Flugsicherheit
Flugsicherheit Operationelle Risiken einer Airline managen Deutsche Lufthansa AG Jochen Mickel Flugbetriebskontrolle Deutsche Lufthansa AG Frankfurt, 13. Juni 2006 Gliederung 1. Was ist Flugsicherheit
Inhalt. Einleitung. Hydrographische Vermessungen mit der Level-A. Kinematisches Laserscanning. Realisierung eines Prototypen
 Kinematische TLS Messungen auf dem Vermessungsboot Level-A M. Sc. Friedrich Keller, dhp:i Dr.-Ing. Christian Hesse, dhp:i Prof. Dr.-Ing. Volker Böder, HCU Dipl.-Ing. Arne Sauer, NIAH 1 Inhalt Einleitung
Kinematische TLS Messungen auf dem Vermessungsboot Level-A M. Sc. Friedrich Keller, dhp:i Dr.-Ing. Christian Hesse, dhp:i Prof. Dr.-Ing. Volker Böder, HCU Dipl.-Ing. Arne Sauer, NIAH 1 Inhalt Einleitung
Wirtschaftlichkeitsbetrachtung einer Ortung medizinischer Geräte
 Wirtschaftlichkeitsbetrachtung einer Ortung medizinischer Geräte Qou vadis RFID 28. Novemver 2006 Malte Stalinski Siemens Enterprise Healthcare Solutions What does the Location Tracking solution offer?
Wirtschaftlichkeitsbetrachtung einer Ortung medizinischer Geräte Qou vadis RFID 28. Novemver 2006 Malte Stalinski Siemens Enterprise Healthcare Solutions What does the Location Tracking solution offer?
Video Line Array Highest Resolution CCTV
 Schille Informationssysteme GmbH Video Line Array Highest Resolution CCTV SiDOC20120817-001 Disadvantages of high resolution cameras High costs Low frame rates Failure results in large surveillance gaps
Schille Informationssysteme GmbH Video Line Array Highest Resolution CCTV SiDOC20120817-001 Disadvantages of high resolution cameras High costs Low frame rates Failure results in large surveillance gaps
F A Q s. SMS Modem Dial-In (TAP-Gateway) 1 Allgemeines... 2. 2 FAQ s... 3
 1 Allgemeines... 2. 2 FAQ s... 3") F A Q s SMS Modem Dial-In (TAP-Gateway) Inhalt: 1 Allgemeines... 2 2 FAQ s... 3 2.1 Frage: Wie lange dauert typischerweise die Einwahl beim O 2 TAP Gateway?...3 2.2 Frage: Welche Modem Parameter müssen
F A Q s SMS Modem Dial-In (TAP-Gateway) Inhalt: 1 Allgemeines... 2 2 FAQ s... 3 2.1 Frage: Wie lange dauert typischerweise die Einwahl beim O 2 TAP Gateway?...3 2.2 Frage: Welche Modem Parameter müssen
Datenaustausch nach VDI 3805: Win-Win Situation für Hersteller, Softwarehäuser und Anwender
 Datenaustausch nach VDI 3805: Win-Win Situation für Hersteller, Softwarehäuser und Anwender Referenten Martin Schröder (Bosch Thermotechnik GmbH) Dr. Andreas Witzig (Polysun Simulationssoftware) Bundesindustrieverband
Datenaustausch nach VDI 3805: Win-Win Situation für Hersteller, Softwarehäuser und Anwender Referenten Martin Schröder (Bosch Thermotechnik GmbH) Dr. Andreas Witzig (Polysun Simulationssoftware) Bundesindustrieverband
Konzept zur Push Notification/GCM für das LP System (vormals BDS System)
") Konzept zur Push Notification/GCM für das LP System (vormals BDS System) Wir Push Autor: Michael Fritzsch Version: 1.0 Stand: 04. Februar 2015 Inhalt 1. Was ist eine Push Notification? 2. Wofür steht GCM?
Konzept zur Push Notification/GCM für das LP System (vormals BDS System) Wir Push Autor: Michael Fritzsch Version: 1.0 Stand: 04. Februar 2015 Inhalt 1. Was ist eine Push Notification? 2. Wofür steht GCM?
Welcome to Veeam. 1860 employees worldwide 33,000. Veeam wurde 2006 gegründet Exponentielles Wachstum bei Umsatz und Kunden
 Welcome to Veeam Veeam wurde 2006 gegründet Exponentielles Wachstum bei Umsatz und Kunden 1860 employees worldwide 33,000 Welcome to Veeam Number of customers 180,000(plan) 134,000 2007 2008 2009 2010
Welcome to Veeam Veeam wurde 2006 gegründet Exponentielles Wachstum bei Umsatz und Kunden 1860 employees worldwide 33,000 Welcome to Veeam Number of customers 180,000(plan) 134,000 2007 2008 2009 2010
SNF-7010 und SmartViewer Dewarping Optionen
 SNF-7010 und SmartViewer Dewarping Optionen Rüdiger Palm Tech Manager DACH 16.03.2015 Einleitung Diese Präsentation ist aus den Anfragen der Support-Telefonate entstanden. Ihre Fragen bezüglich des Dewarping
SNF-7010 und SmartViewer Dewarping Optionen Rüdiger Palm Tech Manager DACH 16.03.2015 Einleitung Diese Präsentation ist aus den Anfragen der Support-Telefonate entstanden. Ihre Fragen bezüglich des Dewarping
Messungen zur Verifizierung der Kalibrierung des NWA HP8510C
 Beitrag zum Arbeitskreis Bipolar 1999 Messungen zur Verifizierung der Kalibrierung des NWA HP8510C von Jörg Berkner Siemens AG HL SIM PX1 1 Einleitung...2 2 Gegenstand der Untersuchung...2 3 Meßgenauigkeit...2
Beitrag zum Arbeitskreis Bipolar 1999 Messungen zur Verifizierung der Kalibrierung des NWA HP8510C von Jörg Berkner Siemens AG HL SIM PX1 1 Einleitung...2 2 Gegenstand der Untersuchung...2 3 Meßgenauigkeit...2
Einführung in die IWK April 2006
 Einführung in die IWK April 2006 Einführung zum Online-Survey Teil 1 Test Intercultural Communication Competence Inventory -ICCI - Bernd Kupka, M.S./Dr. André Everett (University of Otago, Dunedin, Neuseeland)
Einführung in die IWK April 2006 Einführung zum Online-Survey Teil 1 Test Intercultural Communication Competence Inventory -ICCI - Bernd Kupka, M.S./Dr. André Everett (University of Otago, Dunedin, Neuseeland)
Anleitung zur Inbetriebnahme eines SQ-Robotersystems
 Anleitung zur Inbetriebnahme eines SQ-Robotersystems - 1 - Mitsubishi Electric Europe B.V. In dieser Anleitung wird die Anbindung einer Roboter CPU an das iq System beschrieben. SPS-CPU + Roboter-CPU +
Anleitung zur Inbetriebnahme eines SQ-Robotersystems - 1 - Mitsubishi Electric Europe B.V. In dieser Anleitung wird die Anbindung einer Roboter CPU an das iq System beschrieben. SPS-CPU + Roboter-CPU +
Konferenz. Bestandserfassung von Gebäuden. Bianca Böckmann 09. / 10. NOVEMBER 2009. Vortrag: Laserscanning in der. Bestandserfassung von Gebäuden.
 Konferenz 09. / 10. NOVEMBER 2009 Gebäuden Bianca Böckmann Referenzprojekt: Miele & Cie. KG, Werk Gütersloh Produktionshalle G034 G036 Grundfläche ca. 26 000 m² Projekt Grundlagen: Aufgabenstellung -Bestandsaufnahme
Konferenz 09. / 10. NOVEMBER 2009 Gebäuden Bianca Böckmann Referenzprojekt: Miele & Cie. KG, Werk Gütersloh Produktionshalle G034 G036 Grundfläche ca. 26 000 m² Projekt Grundlagen: Aufgabenstellung -Bestandsaufnahme
Ableitung von Bruch- bzw. Geländekanten aus LIDAR-Daten für die hydro-numerische Modellierung am Main
 Ableitung von Bruch- bzw. Geländekanten aus LIDAR-Daten für die hydro-numerische Modellierung am Main Gottfried Mandlburger Institut für Photogrammetrie und Fernerkundung, TU Wien gm@ipf.tuwien.ac.at 3D-Geländekanten
Ableitung von Bruch- bzw. Geländekanten aus LIDAR-Daten für die hydro-numerische Modellierung am Main Gottfried Mandlburger Institut für Photogrammetrie und Fernerkundung, TU Wien gm@ipf.tuwien.ac.at 3D-Geländekanten
Telematik trifft Geomatik
 B der Welt in 3D Die Vermessung Telematik trifft Geomatik Bild: Riegl Prof. Dr. Andreas Nüchter Was ist Telematik? Die Telematik integriert interdisziplinär Methoden der Telekommunikation, der Automatisierungs-technik
B der Welt in 3D Die Vermessung Telematik trifft Geomatik Bild: Riegl Prof. Dr. Andreas Nüchter Was ist Telematik? Die Telematik integriert interdisziplinär Methoden der Telekommunikation, der Automatisierungs-technik
2. Hamburger Anwenderforum Terrestisches Laserscanning 2007. 3D-Spezialvermessung zur Dokumentation komplexer Anlagen
 2. Hamburger Anwenderforum Terrestisches Laserscanning 2007 3D-Spezialvermessung zur Dokumentation komplexer Anlagen Dr. Ing. Ralf König ObjektScan GmbH Kopernikusstrasse 2 14482 Potsdam Einsatzbereiche
2. Hamburger Anwenderforum Terrestisches Laserscanning 2007 3D-Spezialvermessung zur Dokumentation komplexer Anlagen Dr. Ing. Ralf König ObjektScan GmbH Kopernikusstrasse 2 14482 Potsdam Einsatzbereiche
INTERXION Rechenzentrum & Cloud. Volker Ludwig Sales Director
 INTERXION Rechenzentrum & Cloud Volker Ludwig Sales Director AGENDA Kurzvorstellung Interxion Evolution der Rechenzentren bis heute Hybrid Cloud ein Blick in die Zukunft 2 AUF EINEN BLICK FÜHRENDER EUROPÄISCHER
INTERXION Rechenzentrum & Cloud Volker Ludwig Sales Director AGENDA Kurzvorstellung Interxion Evolution der Rechenzentren bis heute Hybrid Cloud ein Blick in die Zukunft 2 AUF EINEN BLICK FÜHRENDER EUROPÄISCHER
Stadtvermessung Frankfurt. RGB Bild, 10 cm Pixel. LIDAR DSM, 4 Pkt/m². Version: März 09
 ASTEC GmbH Nutzung von Luftbild Stadtvermessung Frankfurt und LIDAR Daten RGB Bild, 10 cm Pixel LIDAR DSM, 4 Pkt/m² Gliederung Vorstellung der Firma ASTEC Luftbildkamera und Anwendungen LIDAR und Anwendungen
ASTEC GmbH Nutzung von Luftbild Stadtvermessung Frankfurt und LIDAR Daten RGB Bild, 10 cm Pixel LIDAR DSM, 4 Pkt/m² Gliederung Vorstellung der Firma ASTEC Luftbildkamera und Anwendungen LIDAR und Anwendungen
LEAD MANAGEMENT SYSTEMS
 Paket Lead Standard Barcodescanner 1D Jeder Fachbesucher besitzt eine Eintrittskarte mit Namenschild. Scannen Sie den Strichcode an Ihrem Stand mit einem 1D-Barcode Die Daten werden täglich ab 16:30 Uhr
Paket Lead Standard Barcodescanner 1D Jeder Fachbesucher besitzt eine Eintrittskarte mit Namenschild. Scannen Sie den Strichcode an Ihrem Stand mit einem 1D-Barcode Die Daten werden täglich ab 16:30 Uhr
Anwendungsmöglichkeiten von Laserscannerdaten
 Anwendungsmöglichkeiten von Laserscannerdaten TopScan GmbH Christian Wever Düsterbergstr. 5 48432 Rheine TopScan GmbH gegründet 1991 in Stuttgart durch Dr. Peter Frieß und Dr. Joachim Lindenberger seit
Anwendungsmöglichkeiten von Laserscannerdaten TopScan GmbH Christian Wever Düsterbergstr. 5 48432 Rheine TopScan GmbH gegründet 1991 in Stuttgart durch Dr. Peter Frieß und Dr. Joachim Lindenberger seit
Vorlesungsplan_FH München_2010. Raum Datum 08:15-09:00 Uhr 09:00-09:45 Uhr 10:00-10:45 Uhr 10:45-11:30 Uhr Junkers 18.10.2010 H.
 Vorlesungsplan_FH München_2010 Raum Datum 08:15-09:00 Uhr 09:00-09:45 Uhr 10:00-10:45 Uhr 10:45-11:30 Uhr Junkers 18.10.2010 Einführung Produktsicherungssystem Führung H. Simon/ Führung H. Simon/ Junkers
Vorlesungsplan_FH München_2010 Raum Datum 08:15-09:00 Uhr 09:00-09:45 Uhr 10:00-10:45 Uhr 10:45-11:30 Uhr Junkers 18.10.2010 Einführung Produktsicherungssystem Führung H. Simon/ Führung H. Simon/ Junkers
Kontakterfassung mit LeadSuccess / Visitenkarten Präsentation für die scannen Ispo Sommer 06
 Inline Village Kontakterfassung mit LeadSuccess / Visitenkarten scannen Visitenkarten Präsentation für die scannen Ispo Sommer 06 Unlimited solutions // LeadSuccess // Beschreibung von LeadSuccess LeadSuccess
Inline Village Kontakterfassung mit LeadSuccess / Visitenkarten scannen Visitenkarten Präsentation für die scannen Ispo Sommer 06 Unlimited solutions // LeadSuccess // Beschreibung von LeadSuccess LeadSuccess
GPS - System. Silva März 07.10.2004
 GPS - System Silva März 07.10.2004 Gliederung Was ist GPS? Geschichte Grundfunktion Wie funktioniert GPS? Die Position der Satelliten Die Zeit ist das Wesentliche Die eigentliche Positionenbestimmung Eingeschränkte
GPS - System Silva März 07.10.2004 Gliederung Was ist GPS? Geschichte Grundfunktion Wie funktioniert GPS? Die Position der Satelliten Die Zeit ist das Wesentliche Die eigentliche Positionenbestimmung Eingeschränkte
Configuration management
 Hauptseminar im Wintersemester 2003/2004 Neue Ansätze im IT-Service-Management-Prozessorientierung (ITIL/eTom) Configuration management 18. Februar 2004 Tingting Hu Betreuer: Vitalian A. Danciu Inhalt
Hauptseminar im Wintersemester 2003/2004 Neue Ansätze im IT-Service-Management-Prozessorientierung (ITIL/eTom) Configuration management 18. Februar 2004 Tingting Hu Betreuer: Vitalian A. Danciu Inhalt
3D Laserscanning und Bestandsvermessung. Dr. Hesse und Partner Ingenieure Markus Ehm
 3D Laserscanning und Bestandsvermessung Dr. Hesse und Partner Ingenieure Markus Ehm Inhalt Einleitung 3D Laserscanning: Die Technik Beispielprojekte 09.10.2014 Markus Ehm: 3D Laserscanning und Bestandsvermessung
3D Laserscanning und Bestandsvermessung Dr. Hesse und Partner Ingenieure Markus Ehm Inhalt Einleitung 3D Laserscanning: Die Technik Beispielprojekte 09.10.2014 Markus Ehm: 3D Laserscanning und Bestandsvermessung
Optimization techniques for large-scale traceroute measurements
 Abschlussvortrag Master s Thesis Optimization techniques for large-scale traceroute measurements Benjamin Hof Lehrstuhl für Netzarchitekturen und Netzdienste Institut für Informatik Technische Universität
Abschlussvortrag Master s Thesis Optimization techniques for large-scale traceroute measurements Benjamin Hof Lehrstuhl für Netzarchitekturen und Netzdienste Institut für Informatik Technische Universität
Downloadfehler in DEHSt-VPSMail. Workaround zum Umgang mit einem Downloadfehler
 Downloadfehler in DEHSt-VPSMail Workaround zum Umgang mit einem Downloadfehler Downloadfehler bremen online services GmbH & Co. KG Seite 2 Inhaltsverzeichnis Vorwort...3 1 Fehlermeldung...4 2 Fehlerbeseitigung...5
Downloadfehler in DEHSt-VPSMail Workaround zum Umgang mit einem Downloadfehler Downloadfehler bremen online services GmbH & Co. KG Seite 2 Inhaltsverzeichnis Vorwort...3 1 Fehlermeldung...4 2 Fehlerbeseitigung...5
elearning-module Project planning Bestell.Nr.: 1331703 Kurzbeschreibung Inhaltsverzeichnis des Moduls Project planning
 Bestell.Nr.: 1331703 Kurzbeschreibung Inhaltsverzeichnis des Moduls 1. 2. Work process of projects 3. Exercise: Work process of projects 4. Tasks of the project planning 5. Exercise: Tasks of the project
Bestell.Nr.: 1331703 Kurzbeschreibung Inhaltsverzeichnis des Moduls 1. 2. Work process of projects 3. Exercise: Work process of projects 4. Tasks of the project planning 5. Exercise: Tasks of the project