Informatik Einführung in das ROS Robot Operating System
|
|
|
- Rosa Messner
- vor 6 Jahren
- Abrufe
Transkript

1 Informatik Einführung in das ROS Robot Operating System Robotik / AMR / Sensorik Jan Bühler Mannheim, Hochschule Mannheim University of Applied Sciences
2 Inhalt 1.Aufgaben des ROS Robot Operating System IPC, Pakete (Packages), Stacks, Messages, Services, Nodes und Topics 2.Funktionalitäten Publisher und Subscriber 3.Vorhandene wichtige Stacks Navigation-Stack, Koordinatentransformationen über TF 4.ROS - Visualisierung rviz, rosbag, rxbag rxplot, rxgraph 5.Beispiel am Pioneer3dx - Roboter 6.Zusammenfassung
3 1. Aufgaben des ROS Robot Operating System Übersicht: Allgemeines über ROS Interprozesskommunikation (IPC) Paketverwaltung / Packages und Stacks Messages Services Nodes Topics



4 1. Aufgaben des ROS Allgemeines über ROS - Releases C TURTLE DIAMONDBACK ELECTRIC
5
6 1. Aufgaben des ROS Allgemeines über ROS - Facts Open Source Operating System für Roboter Es bietet die Funktionalitäten eines Betriebssystems Hardware-Abstraktion, Unterste Schicht Geräteverwaltung Nachrichtenverwaltung zwischen Prozessen Möglichkeit der gleichzeitigen Entw. und Ausf. auf mehreren Rechnern Momentan bester Support unter Ubuntu (Version ab 9 aufwärts) Steuerung der versch. Progr., die gleichzeitig auf dem Roboter ablaufen ROS IPC nicht direkt echtzeitfähig Bereitstellung von Anzeigetools Bietet Schnittstellen für Sensoren und Programme Kann sowohl in Python als auch in C++ geschrieben werden
7 1. Aufgaben des ROS Interprozesskommunikation (IPC) Problematik der Kommunikation zwischen verschiedenen Systemen des Roboters Problematik bei Mikrocontroller zu PC oder umgekehrt Problematik bei Mikrocontroller zu Mikrocontroller Lösung durch IPC mit TCP/IP Sicherheitseinstellung bei der Übertragung Anforderung an die Geschwindigkeit / Schnelligkeit der Kommunikation Koordination von Nachrichten durch zentralen Master
8 1. Aufgaben des ROS Paketverwaltung - Packages ROS ist durch Softwarepakete (sogn. Packages) aufgebaut Ein Package beinhaltet Laufzeitprozesse (Nodes) ROS abhängige Bibliotheken Datensätze Konfigurationsdateien 3 rd Party Software Libs usw. in der mainfest.xml definiert Packages sind dazu da um Code wiederverwendbar zu machen (code reuse)
9 1. Aufgaben des ROS Paketverwaltung - Stacks Sammlung von Paketen (Packages) Definiert in der Datei stack.xml Der Sinn ist, dass Stacks die Verteilung und Verwendbarkeit von Code vereinfachen Meist viele Packages ähnlicher Aufgaben in einem Stack verpackt
10 1. Aufgaben des ROS Message (msg) Messages werden verwendet um unter ROS Nachrichten zwischen Knoten und Topics auszutuaschen Dafür verwendet ROS eine einfache Beschreibung der Datentypen in Textdateien Durch diese Beschreibung kann für unterschidliche Sprachen Code autogeneriert werden Diese sind in.msg-dateien im msg- Unterverzeichnis eines ROS-Pakets abgelegt Eigene Message-Typen sind mit Paket Ressource-Namen bezeichnet Standard Messages sind mit std_msg/msg/string.msg bezeichnet
11 1. Aufgaben des ROS Service (srv) ROS verwendet eine eigene vereinfachte Service Description Language ("srv") für die Beschreibung von ROS Service-Typen Setzt direkt auf die ROS msg-format auf Ermöglicht die Anfrage / Antwort-Kommunikation zwischen den Knoten Service-Beschreibungen sind in.srv-dateien im srv- Unterverzeichnis eines Pakets gespeichert Service-Beschreibungen werden für die Verwendung mit dem Paket Ressource-Namen bezeichnet Z. B.: wird die Datei robot_srvs/srv/setjointcmd.srv als Service robot_srvs/setjointcmd bezeichnet
12 1. Aufgaben des ROS Nodes Der Nachrichtenaustausch findet bei Nodes durch 3 Möglichkeiten statt Parameter Server Topics Services Nodes werden wie in einem Graph angeordnet In einem System laufen viele Nodes Parallel Diese werden zu beginn gestartet Beispiele sind Nodes für: Laserscanner Kinect Pfadplanung usw.
13 1. Aufgaben des ROS Topics Topics verhalten sich wie ein virtuelles BUS-System Nodes können von Topics lesen (subscribe) Nodes können an Topics senden (publish) Es gibt keine Begrenzung wie viele Nodes publsih oder subscribe auf ein Topic machen

14 2. Wichtige Funktionalitäten Talker und Listener Publisher / Subscriber Publish data to topic Topic: /camera/depth/points Topic... Subscribe to topic Subscribe to topic Node: Object recognition Node: Obstacle avoidance
15 3. Vorhandene wichtige Stacks Übersicht: TF Koordinatentransformation Navigationstack URDF - Modelle
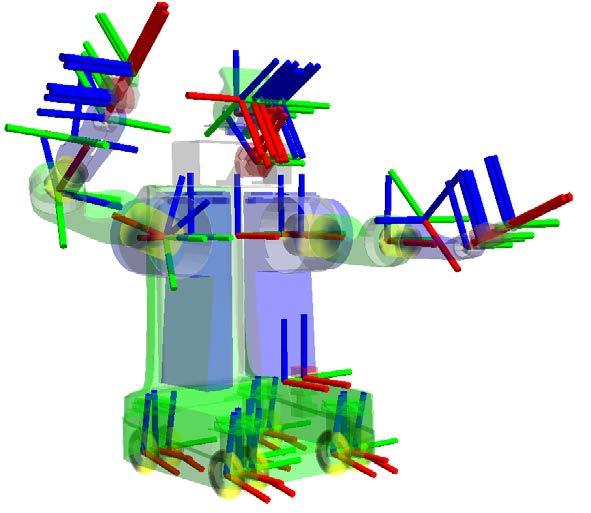


16 TF Koordinatentransformation Pioneer3dx-Bot Pr2-Bot
17 Navigationstack Wertet Sensordaten aus z.b.: Laserdaten Baut daraus mit gmapping (ebenfalls ein ROS-Stack) eine Begehbarkeitskarte Warum? Zur Kollisionsvermeidung Bei erfolgreicher Erstellung einer Map kann dann ein Ziel übergeben werden Pfadplanung durch Navigationstack Kollisionsvermeidung Reaktion auf sich ändernde Umgebung Aufbau einer globalen Karte

18 Navigationstack global map:
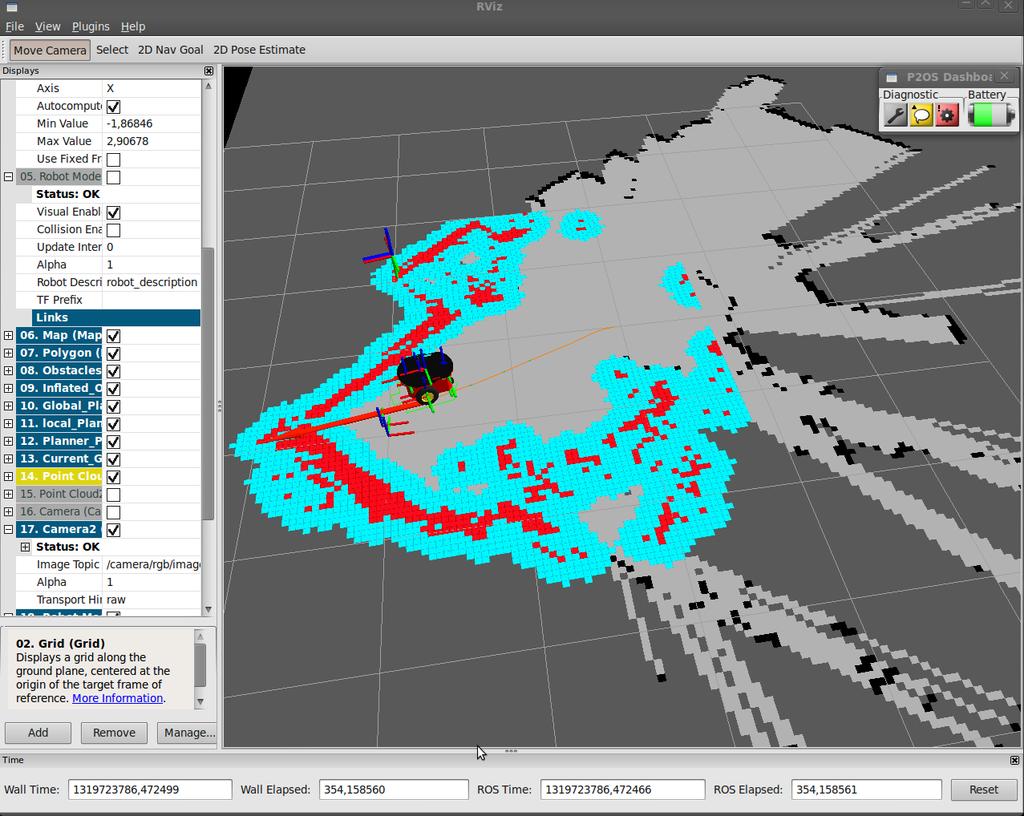
19 Navigationstack local map:
20 URDF - Modelle
21 4. ROS - Visualisierung Übersicht: rviz rosbag rxbag rxplot rxgraph

22 rviz Startbefehl: rosrun rviz rviz
23 rosbag Rosbag record hört auf den angegebenen Topics zu und zeichnet die Aktivität auf Rosbag play kann dies wiedergeben Gut zu Demonstrationszwecken Gut um Referenzdaten zu erzeugen
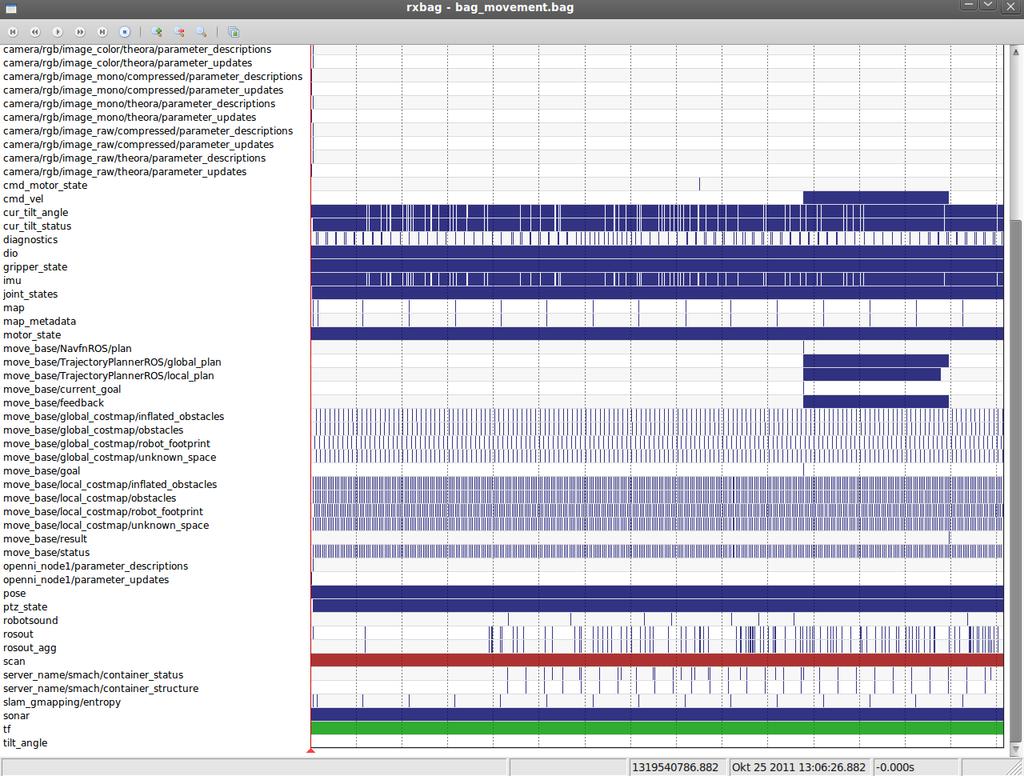
24 rxbag

25 rxplot
26 rxgraph

27 5. Beispiel am Pioneer3dx - Roboter
28 6. Zusammenfassung Was ist ROS? Wie wird Kommuniziert? Was ist TF? Was ist der Navigation Stack? Was gibt es für Visualisierungstools?
29 Präsentationsabschluss Danke für Ihre Aufmerksamkeit Robotik / AMR / Sensorik Jan Bühler Mannheim,
Einführung in das Robot Operating System (ROS)
") Einführung in das Robot Operating System (ROS) Raum: BC414, Tel.: 0203-379 - 3583, E-Mail: michael.korn@uni-due.de Motivation Ziele des Vortrags Robot Operating System (ROS) Nachteile von ERSP und Windows
Einführung in das Robot Operating System (ROS) Raum: BC414, Tel.: 0203-379 - 3583, E-Mail: michael.korn@uni-due.de Motivation Ziele des Vortrags Robot Operating System (ROS) Nachteile von ERSP und Windows
Turtlebot(s) Evaluation, Programmierung und mehr Robotik FP SS2013
 Evaluation, Programmierung und mehr Robotik FP SS2013") Turtlebot(s) Evaluation, Programmierung und mehr Robotik FP SS2013 Felix Aller July 22, 2015 Felix Aller 1 / 25 Aufgabenstellung
Turtlebot(s) Evaluation, Programmierung und mehr Robotik FP SS2013 Felix Aller July 22, 2015 Felix Aller 1 / 25 Aufgabenstellung
Simulink: Softwareentwurf für eingebettete Systeme ROS-Arduino-Interface. von Christian Schildwächter
 Simulink: Softwareentwurf für eingebettete Systeme ROS-Arduino-Interface von Christian Schildwächter Simulink Simulink S-Functions Softwareprojekt ROS-Arduino-Interface Simulink 3 LIVE DEMO 4 External
Simulink: Softwareentwurf für eingebettete Systeme ROS-Arduino-Interface von Christian Schildwächter Simulink Simulink S-Functions Softwareprojekt ROS-Arduino-Interface Simulink 3 LIVE DEMO 4 External
Einführung Software. Gerald Steinbauer Institut für Softwaretechnologie. Gerald Steinbauer. Konstruktion Mobiler Roboter, PR, WS10
 Konstruktion Mobiler Roboter Einführung Software Institut für Softwaretechnologie 1 Kontroll Paradigmen Selbstlokalisation vorhandene Software Agenda Robot Operating System (ROS) 2 Kontrollparadigmen drei
Konstruktion Mobiler Roboter Einführung Software Institut für Softwaretechnologie 1 Kontroll Paradigmen Selbstlokalisation vorhandene Software Agenda Robot Operating System (ROS) 2 Kontrollparadigmen drei
Systemanforderungen Manufacturing Execution System fabmes
 Manufacturing Execution System fabmes Das Manufacturing Execution System fabmes bemüht sich trotz hoher Anforderungen an die Datenverarbeitung möglichst geringe Anforderungen an die Hardware zu stellen.
Manufacturing Execution System fabmes Das Manufacturing Execution System fabmes bemüht sich trotz hoher Anforderungen an die Datenverarbeitung möglichst geringe Anforderungen an die Hardware zu stellen.
Leistungskurs C++ ROS: Einstieg und Tools
 Leistungskurs C++ ROS: Einstieg und Tools Martin Knopp, Johannes Feldmaier, Stefan Röhrl 08.11.2016 Folie 1/15 LK C++: ROS Intro & Tools Martin Knopp, Johannes Feldmaier, Stefan Röhrl 08.11.2016 Themen
Leistungskurs C++ ROS: Einstieg und Tools Martin Knopp, Johannes Feldmaier, Stefan Röhrl 08.11.2016 Folie 1/15 LK C++: ROS Intro & Tools Martin Knopp, Johannes Feldmaier, Stefan Röhrl 08.11.2016 Themen
Archive / Backup System für OpenVMS
 Archive / Backup System für OpenVMS DECUS Symposium 2002 Bonn Vortrag-Nr. 3C04 Günther Fröhlin Compaq Computer Corporation Colorado Springs, USA 1 Highlights V4.0 Auslieferung Januar 2002 Hauptversion
Archive / Backup System für OpenVMS DECUS Symposium 2002 Bonn Vortrag-Nr. 3C04 Günther Fröhlin Compaq Computer Corporation Colorado Springs, USA 1 Highlights V4.0 Auslieferung Januar 2002 Hauptversion
Rolland. Niels Schütte Hristo Gurdzhanov. 1 Vorstellung 2 Gliederung 3 Forschung 4 Rolland 1 5 Rolland 2. 6 Obstacle Map 7 Rolland 3 8 Projekte
 Rolland Niels Schütte Gliederung Forschung Rolland 1 Rolland 2 ObstacleMap Rolland 3 Projekte Probleme Finanzierung Forschung Navigation/Raumkognition Sichere Systeme Rolland 1 Kamera Jede Menge Sensoren
Rolland Niels Schütte Gliederung Forschung Rolland 1 Rolland 2 ObstacleMap Rolland 3 Projekte Probleme Finanzierung Forschung Navigation/Raumkognition Sichere Systeme Rolland 1 Kamera Jede Menge Sensoren
ObjectBridge Java Edition
 ObjectBridge Java Edition Als Bestandteil von SCORE Integration Suite stellt ObjectBridge Java Edition eine Verbindung von einem objektorientierten Java-Client zu einer fast beliebigen Server-Komponente
ObjectBridge Java Edition Als Bestandteil von SCORE Integration Suite stellt ObjectBridge Java Edition eine Verbindung von einem objektorientierten Java-Client zu einer fast beliebigen Server-Komponente
Simultaneous localization and mapping mit dem Pioneer 3AT Robotor. Author: Eugen Bopp Betreuer: Professor Dr. rer. nat.
 Simultaneous localization and mapping mit dem Pioneer 3AT Robotor Author: Eugen Bopp Betreuer: Professor Dr. rer. nat. Wolfgang Ertel 31. Oktober 2011 Zusammenfassung Ziel der Projektarbeit mit dem Titel
Simultaneous localization and mapping mit dem Pioneer 3AT Robotor Author: Eugen Bopp Betreuer: Professor Dr. rer. nat. Wolfgang Ertel 31. Oktober 2011 Zusammenfassung Ziel der Projektarbeit mit dem Titel
Fakultät für Informatik der Technischen Universität München. Cognitive Systems. Introduction to Practical Session
 Introduction to Practical Session Prof. Dr.-Ing. habil. Alois Knoll Reinhard Lafrenz, Florian Röhrbein, Sascha Griffiths Robotics and Embedded Systems (Informatik VI, Prof. Knoll) TUM Outline Demonstrator
Introduction to Practical Session Prof. Dr.-Ing. habil. Alois Knoll Reinhard Lafrenz, Florian Röhrbein, Sascha Griffiths Robotics and Embedded Systems (Informatik VI, Prof. Knoll) TUM Outline Demonstrator
PLIN-Slave Test-Slave für den LIN-Bus mit diversen I/Os. Benutzerhandbuch V1.1.0
 PLIN-Slave Test-Slave für den LIN-Bus mit diversen I/Os Benutzerhandbuch V1.1.0 Berücksichtigte Produkte Produktbezeichnung Ausführung Artikelnummer PLIN-Slave Eval-Board IPEH-004050 Alle in diesem Dokument
PLIN-Slave Test-Slave für den LIN-Bus mit diversen I/Os Benutzerhandbuch V1.1.0 Berücksichtigte Produkte Produktbezeichnung Ausführung Artikelnummer PLIN-Slave Eval-Board IPEH-004050 Alle in diesem Dokument
Roberta Workshops. Robotik in Forschung und Lehre. Roberta Workshops. 3 Schwerpunkte Robotik in Schulen
 Roberta Workshops Robotik in Forschung und Lehre Prof. Dr. Martina Lehser Fakultät für Ingenieurwissenschaften Fachrichtung Informatik 18.06.2009 ZeMA Roberta RegioZentrum Saarland Hochschule für Technik
Roberta Workshops Robotik in Forschung und Lehre Prof. Dr. Martina Lehser Fakultät für Ingenieurwissenschaften Fachrichtung Informatik 18.06.2009 ZeMA Roberta RegioZentrum Saarland Hochschule für Technik
Linux als File- und Printserver - SAMBA
 Linux als File- und Printserver - SAMBA Wolfgang Karall karall@mail.zserv.tuwien.ac.at 18.-21. März 2002 Abstract Durchführung der Installation, Konfiguration und Administration eines File- und Printservers
Linux als File- und Printserver - SAMBA Wolfgang Karall karall@mail.zserv.tuwien.ac.at 18.-21. März 2002 Abstract Durchführung der Installation, Konfiguration und Administration eines File- und Printservers
Lehrstuhl für Datenverarbeitung. Technische Universität München. Leistungskurs C++ Subversion / CMake
 Leistungskurs C++ Subversion / CMake Subversion am LDV Repository der Gruppen: https://www2.ldv.ei.tum.de/repos/14cppx Anlegen des Repository: svn checkout https://www2.ldv.ei.tum.de/repos/14cppx cd 14cppX
Leistungskurs C++ Subversion / CMake Subversion am LDV Repository der Gruppen: https://www2.ldv.ei.tum.de/repos/14cppx Anlegen des Repository: svn checkout https://www2.ldv.ei.tum.de/repos/14cppx cd 14cppX
Das ISO / OSI -7 Schichten Modell
 Begriffe ISO = Das ISO / OSI -7 Schichten Modell International Standardisation Organisation Dachorganisation der Normungsverbände OSI Model = Open Systems Interconnection Model Modell für die Architektur
Begriffe ISO = Das ISO / OSI -7 Schichten Modell International Standardisation Organisation Dachorganisation der Normungsverbände OSI Model = Open Systems Interconnection Model Modell für die Architektur
Prüfung WS 2006/07. Robotik
 Prüfung WS 26/7 Robotik Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
Prüfung WS 26/7 Robotik Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit Namen und Matr.Nr. werden korrigiert. Keine rote Farbe verwenden. Zu jeder Lösung Aufgabennummer angeben.
3-schichtige Informationssystem-Architektur
 3-schichtige Informationssystem-Architektur plattformunabhängig beliebige Endgeräte Client als Applikation & Applet XML über SOAP Standard plattformunabhängig objektorientierte Architektur multiuserfähig
3-schichtige Informationssystem-Architektur plattformunabhängig beliebige Endgeräte Client als Applikation & Applet XML über SOAP Standard plattformunabhängig objektorientierte Architektur multiuserfähig
Virtueller Campus. Virtueller Campus Horw mit interaktiver Steuerung. HowTo: Externe Bibliotheken
 Virtueller Campus Virtueller Campus Horw mit interaktiver Steuerung Bachelor Diplomarbeit FS 2013 Inhaltsverzeichnis 1. EINLEITUNG... 1 2. VORBEDINGUNGEN... 1 3. ORDNERSTRUKTUR ERWEITERN... 1 4. PROJEKT
Virtueller Campus Virtueller Campus Horw mit interaktiver Steuerung Bachelor Diplomarbeit FS 2013 Inhaltsverzeichnis 1. EINLEITUNG... 1 2. VORBEDINGUNGEN... 1 3. ORDNERSTRUKTUR ERWEITERN... 1 4. PROJEKT
Anbindung des Robot Operating Systems an Speicherprogrammierbare Steuerungen
 Anbindung des Rbt Operating Systems an Speicherprgrammierbare Steuerungen Dipl.-Infrm. Felix Meßmer Fraunhfer-Institut für Prduktinstechnik und Autmatisierung, Stuttgart Inhalt Einleitung und Mtivatin
Anbindung des Rbt Operating Systems an Speicherprgrammierbare Steuerungen Dipl.-Infrm. Felix Meßmer Fraunhfer-Institut für Prduktinstechnik und Autmatisierung, Stuttgart Inhalt Einleitung und Mtivatin
Konstruktion Mobiler Roboter Einführung Software
 Konstruktion Mobiler Roboter Einführung Software Institut für Softwaretechnologie 1 Agenda Robot Operating System (ROS) Selbstlokalisation und Navigation Kinect & Point Cloud Library (PCL) Arm Navigation
Konstruktion Mobiler Roboter Einführung Software Institut für Softwaretechnologie 1 Agenda Robot Operating System (ROS) Selbstlokalisation und Navigation Kinect & Point Cloud Library (PCL) Arm Navigation
Styleguides als Werkzeug für bessere Software-Usability im Gesundheitswesen
 Styleguides als Werkzeug für bessere Software-Usability im Gesundheitswesen Motivation, Vorteile, Handlungsempfehlungen SESSION 2 Usability und Mobility 09. April, conhit 2013 Sabrina Schmidt (BSc Medizinische
Styleguides als Werkzeug für bessere Software-Usability im Gesundheitswesen Motivation, Vorteile, Handlungsempfehlungen SESSION 2 Usability und Mobility 09. April, conhit 2013 Sabrina Schmidt (BSc Medizinische
Xcalibur-2 Alpha. Time. Christian Rempis University of Applied Sciences Bonn-Rhein-Sieg 17. Januar 2006 1
 Time Christian Rempis University of Applied Sciences Bonn-Rhein-Sieg 17. Januar 2006 1 Control and Command Environment for a Robotic Experimenter R&D 1 Examination Presentation by Christian Rempis Christian
Time Christian Rempis University of Applied Sciences Bonn-Rhein-Sieg 17. Januar 2006 1 Control and Command Environment for a Robotic Experimenter R&D 1 Examination Presentation by Christian Rempis Christian
Projekt AGB-10 Fremdprojektanalyse
 Projekt AGB-10 Fremdprojektanalyse 17. Mai 2010 1 Inhaltsverzeichnis 1 Allgemeines 3 2 Produktübersicht 3 3 Grundsätzliche Struktur und Entwurfsprinzipien für das Gesamtsystem 3 3.1 Die Prefuse Library...............................
Projekt AGB-10 Fremdprojektanalyse 17. Mai 2010 1 Inhaltsverzeichnis 1 Allgemeines 3 2 Produktübersicht 3 3 Grundsätzliche Struktur und Entwurfsprinzipien für das Gesamtsystem 3 3.1 Die Prefuse Library...............................
Beispiel Architekturentwurf
 Architekturentwurf Uni Bremen Projekt Architekturentwurf Produkt: MP3-Player Open Source Projekt Anforderungen: neue Kompressionsalgorithmen + Dateiformate unterstützen verschiedene Ausgabegeräte verschiedene
Architekturentwurf Uni Bremen Projekt Architekturentwurf Produkt: MP3-Player Open Source Projekt Anforderungen: neue Kompressionsalgorithmen + Dateiformate unterstützen verschiedene Ausgabegeräte verschiedene
Smartphone Entwicklung mit Android und Java
 Smartphone Entwicklung mit Android und Java predic8 GmbH Moltkestr. 40 53173 Bonn Tel: (0228)5552576-0 www.predic8.de info@predic8.de Was ist Android Offene Plattform für mobile Geräte Software Kompletter
Smartphone Entwicklung mit Android und Java predic8 GmbH Moltkestr. 40 53173 Bonn Tel: (0228)5552576-0 www.predic8.de info@predic8.de Was ist Android Offene Plattform für mobile Geräte Software Kompletter
Einführung Software. Gerald Steinbauer Institut für Softwaretechnologie. Gerald Steinbauer. Konstruktion Mobiler Roboter, PR, WS12
 Konstruktion Mobiler Roboter Einführung Software Institut für Softwaretechnologie 1 Agenda Robot Operating System (ROS) Selbstlokalisation und Navigation Kinect & Point Cloud Library (PCL) Grasping & Arm
Konstruktion Mobiler Roboter Einführung Software Institut für Softwaretechnologie 1 Agenda Robot Operating System (ROS) Selbstlokalisation und Navigation Kinect & Point Cloud Library (PCL) Grasping & Arm
QUICK INSTALLATION GUIDE
 BIANCA/BRI für Windows NT Willkommen zu einer der leistungsfähigsten ISDN-Lösungen für Windows NT. Diese Lösung umfaßt nicht nur die CAPI (Common ISDN Application Program Interface), sondern auch NDIS-IP.
BIANCA/BRI für Windows NT Willkommen zu einer der leistungsfähigsten ISDN-Lösungen für Windows NT. Diese Lösung umfaßt nicht nur die CAPI (Common ISDN Application Program Interface), sondern auch NDIS-IP.
Seminararbeit Embedded Systems - Discovery Mechanismus für sdds. Kevin Sapper
 Seminararbeit Embedded Systems - Discovery Mechanismus für sdds Kevin Sapper Seminararbeit Embedded Systems - Discovery Mechanismus für sdds Kevin Sapper Table of Contents... v 1. Einführung... 1 2. Grundlagen...
Seminararbeit Embedded Systems - Discovery Mechanismus für sdds Kevin Sapper Seminararbeit Embedded Systems - Discovery Mechanismus für sdds Kevin Sapper Table of Contents... v 1. Einführung... 1 2. Grundlagen...
ein Versandsystem...das immer passt
 beratung planung projektbetreuung umsetzung support ein Versandsystem......das immer passt Anbindung an SAP Systeme www.heidler-strichcode.de benutzerfreundlich multi-carrierfähig modularer aufbau flexibel
beratung planung projektbetreuung umsetzung support ein Versandsystem......das immer passt Anbindung an SAP Systeme www.heidler-strichcode.de benutzerfreundlich multi-carrierfähig modularer aufbau flexibel
Benutzerhandbuch. Neukirchen
 Benutzerhandbuch Neukirchen August 2015 Kontakt: Kai Hübl Lambertsberg 17 D-34626 Neukirchen kai.huebl@asneg.de Contents 1 Einleitung... 5 1.1 Inhalt... 5 1.2 OPC UA Client Stack... 5 1.3 OPC UA Server
Benutzerhandbuch Neukirchen August 2015 Kontakt: Kai Hübl Lambertsberg 17 D-34626 Neukirchen kai.huebl@asneg.de Contents 1 Einleitung... 5 1.1 Inhalt... 5 1.2 OPC UA Client Stack... 5 1.3 OPC UA Server
DBUS Interprozess-Kommunikation für Embedded-Plattformen
 DBUS Interprozess-Kommunikation für Embedded-Plattformen Andreas Schwarz Neratec Solutions AG Firmenprofil Neratec Solutions AG Produkt-Entwicklungen für kundenspezifische elektronische Produkte Produkte
DBUS Interprozess-Kommunikation für Embedded-Plattformen Andreas Schwarz Neratec Solutions AG Firmenprofil Neratec Solutions AG Produkt-Entwicklungen für kundenspezifische elektronische Produkte Produkte
Einführung Software. Gerald Steinbauer Institut für Softwaretechnologie. Gerald Steinbauer. Konstruktion Mobiler Roboter, PR, WS11
 Konstruktion Mobiler Roboter Einführung Software Institut für Softwaretechnologie 1 Kontroll Paradigmen Agenda Robot Operating System (ROS) Selbstlokalisation und Navigation Kinect & Point Cloud Library
Konstruktion Mobiler Roboter Einführung Software Institut für Softwaretechnologie 1 Kontroll Paradigmen Agenda Robot Operating System (ROS) Selbstlokalisation und Navigation Kinect & Point Cloud Library
Kommunikation zwischen Mikrocontrollern
 Kommunikation zwischen Mikrocontrollern Serielle Kommunikation Bitweises Übertragen der Daten nacheinander auf einer Leitung serielle Schnittstelle im PC und im Mikrocontroller = Standard große Anwendungsbreite
Kommunikation zwischen Mikrocontrollern Serielle Kommunikation Bitweises Übertragen der Daten nacheinander auf einer Leitung serielle Schnittstelle im PC und im Mikrocontroller = Standard große Anwendungsbreite
SiDaS Sicherer Datenaustausch Sachsen Meine Daten in der SachsenCloud? 27. September 2016 Renate Bachmann & André Berthold
 SiDaS Sicherer Datenaustausch Sachsen Meine Daten in der SachsenCloud? 27. September 2016 Renate Bachmann & André Berthold Agenda Motivation SiDaS als Dienst Vorstellung der Software Unser Angebot 2 27.
SiDaS Sicherer Datenaustausch Sachsen Meine Daten in der SachsenCloud? 27. September 2016 Renate Bachmann & André Berthold Agenda Motivation SiDaS als Dienst Vorstellung der Software Unser Angebot 2 27.
Digitale Transformation
 Digitale Transformation Auswirkungen auf Ihr Rechenzentrum @ Open Source Business Forum 2016 Michael Stanscheck Senior Partner Executive Cloud & Storage michael.stanscheck@suse.com Follow Me: @michastan
Digitale Transformation Auswirkungen auf Ihr Rechenzentrum @ Open Source Business Forum 2016 Michael Stanscheck Senior Partner Executive Cloud & Storage michael.stanscheck@suse.com Follow Me: @michastan
Systemvoraussetzungen
 OCLC GmbH Betriebsstätte Böhl-Iggelheim Am Bahnhofsplatz 1 E-Mail: 67459 Böhl-Iggelheim bibliotheca@oclc.org Tel. +49-(0)6324-9612-0 Internet: Fax +49-(0)6324-9612-4005 www.oclc.org Impressum Titel Hersteller,
OCLC GmbH Betriebsstätte Böhl-Iggelheim Am Bahnhofsplatz 1 E-Mail: 67459 Böhl-Iggelheim bibliotheca@oclc.org Tel. +49-(0)6324-9612-0 Internet: Fax +49-(0)6324-9612-4005 www.oclc.org Impressum Titel Hersteller,
Verteilte Systeme. Verteilte Systeme. 5 Prozeß-Management SS 2016
 Verteilte Systeme SS 2016 Universität Siegen rolanda.dwismuellera@duni-siegena.de Tel.: 0271/740-4050, Büro: H-B 8404 Stand: 31. Mai 2016 Betriebssysteme / verteilte Systeme Verteilte Systeme (1/14) i
Verteilte Systeme SS 2016 Universität Siegen rolanda.dwismuellera@duni-siegena.de Tel.: 0271/740-4050, Büro: H-B 8404 Stand: 31. Mai 2016 Betriebssysteme / verteilte Systeme Verteilte Systeme (1/14) i
TUSReport Installationsanleitung
 TUSReport Installationsanleitung YOKOGAWA Deutschland GmbH Broichhofstraße 7-11 40880 Ratingen Tel. +49-2102 - 4983-0 1/18 Inhalt: 1. Einleitung... 3 2. Revision... 3 3. Systemvorrausetzungen... 4 3.1
TUSReport Installationsanleitung YOKOGAWA Deutschland GmbH Broichhofstraße 7-11 40880 Ratingen Tel. +49-2102 - 4983-0 1/18 Inhalt: 1. Einleitung... 3 2. Revision... 3 3. Systemvorrausetzungen... 4 3.1
4. Hierarchische und netzwerkartige Datenbankmodelle
 4. Hierarchische und netzwerkartige Datenbankmodelle 4.1 Hierarchische Datenbanken Hierarchien können durch Baumgraphen beschrieben werden. Datensätze einer hierarchischen Datenbank (HDB) sind in Segmenten
4. Hierarchische und netzwerkartige Datenbankmodelle 4.1 Hierarchische Datenbanken Hierarchien können durch Baumgraphen beschrieben werden. Datensätze einer hierarchischen Datenbank (HDB) sind in Segmenten
Aufbau & Analyse von Industrie-Netzwerken
 Aufbau & Analyse von Industrie-Netzwerken Lerneinheit 1: Arbeiten mit Wireshark Prof. Dr. Christoph Karg Studiengang Informatik Hochschule Aalen Sommersemester 2016 13.4.2016 Gliederung Übersicht Diese
Aufbau & Analyse von Industrie-Netzwerken Lerneinheit 1: Arbeiten mit Wireshark Prof. Dr. Christoph Karg Studiengang Informatik Hochschule Aalen Sommersemester 2016 13.4.2016 Gliederung Übersicht Diese
ANDROID. Analyse der Android Plattform. Andre Rein, Johannes Florian Tietje. 28. Oktober 2010. FH-Gieÿen-Friedberg Android Praktikum
 Analyse der Android Plattform Andre Rein, Johannes Florian Tietje FH-Gieÿen-Friedberg Android Praktikum 28. Oktober 2010 Topics 1 Übersicht Android Plattform Application Framework Activities und Services
Analyse der Android Plattform Andre Rein, Johannes Florian Tietje FH-Gieÿen-Friedberg Android Praktikum 28. Oktober 2010 Topics 1 Übersicht Android Plattform Application Framework Activities und Services
DIGITALVARIO. Anleitung Bootloader. Ausgabe 0.1 deutsch 29.11.2005. für Direkt-Digital-Vario. Firmware ab 00-06-00 Hardware 01 Seriennummer ab 0003
 DIGITALVARIO Anleitung Bootloader Ausgabe 0.1 deutsch 29.11.2005 für Direkt-Digital-Vario Firmware ab 00-06-00 Hardware 01 Seriennummer ab 0003 1. Funktion Der Bootloader dient dazu Updates der Variosoftware
DIGITALVARIO Anleitung Bootloader Ausgabe 0.1 deutsch 29.11.2005 für Direkt-Digital-Vario Firmware ab 00-06-00 Hardware 01 Seriennummer ab 0003 1. Funktion Der Bootloader dient dazu Updates der Variosoftware
IHR WEG ZUR DOI-REGISTRIERUNG
 // TIB DOI-SERVICE IHR WEG ZUR DOI-REGISTRIERUNG So werden Ihre Forschungsdaten im Internet auffindbar und zitierfähig. 10.3207/2959859860 10.1594/GFZ.GEOFON.gfz2009kciu 100 90 80 70 60 50 40 30 20 10
// TIB DOI-SERVICE IHR WEG ZUR DOI-REGISTRIERUNG So werden Ihre Forschungsdaten im Internet auffindbar und zitierfähig. 10.3207/2959859860 10.1594/GFZ.GEOFON.gfz2009kciu 100 90 80 70 60 50 40 30 20 10
Projektmanagementsoftware
 Professionelles Projektmanagement in der Praxis PHProjekt eine open source Projektmanagementsoftware Referenten: Moritz Mohrmann & Mathias Rohlfs Team 4 Agenda Einleitung PHProjekt eine Übersicht Installation
Professionelles Projektmanagement in der Praxis PHProjekt eine open source Projektmanagementsoftware Referenten: Moritz Mohrmann & Mathias Rohlfs Team 4 Agenda Einleitung PHProjekt eine Übersicht Installation
Grid-Systeme. Betrachtung verschiedener Softwareplattformen zur Realisierung von Grids und Vorstellung des Globus Toolkit. 07.06.2002 Grid Systeme 1
 Grid-Systeme Betrachtung verschiedener Softwareplattformen zur Realisierung von Grids und Vorstellung des Globus Toolkit 07.06.2002 Grid Systeme 1 Gliederung Vorstellung verschiedener Plattformen Globus
Grid-Systeme Betrachtung verschiedener Softwareplattformen zur Realisierung von Grids und Vorstellung des Globus Toolkit 07.06.2002 Grid Systeme 1 Gliederung Vorstellung verschiedener Plattformen Globus
Szenario 3: Service mit erweiterter Schnittstelle
 2. Hintergrundverarbeitung in Android: Services und Notifications Szenarien für lokale Services Szenario 3: Service mit erweiterter Schnittstelle Ein Service bietet zusätzliche Methoden an, über die sich
2. Hintergrundverarbeitung in Android: Services und Notifications Szenarien für lokale Services Szenario 3: Service mit erweiterter Schnittstelle Ein Service bietet zusätzliche Methoden an, über die sich
JMS Java Message Service
 JMS Java Message Service TK3 - WS03/04 Dipl.-Ing. Erwin Aitenbichler Abt. Telekooperation TU Darmstadt 1 JMS: Java Message Service Messaging Lose gekoppelte verteilte Kommunikation RMI: Eng gekoppelt Sender
JMS Java Message Service TK3 - WS03/04 Dipl.-Ing. Erwin Aitenbichler Abt. Telekooperation TU Darmstadt 1 JMS: Java Message Service Messaging Lose gekoppelte verteilte Kommunikation RMI: Eng gekoppelt Sender
GEARWHEEL V4.0 - Release Notes (11.06.2013)
") GEARWHEEL V4.0 - Release Notes (11.06.2013) Diese Dokumentation enthält folgende Inhalte: Kompatibilitätstabelle Neuheiten bei diesem Release Systemvoraussetzungen Wie bekomme ich die neue Version? Installation
GEARWHEEL V4.0 - Release Notes (11.06.2013) Diese Dokumentation enthält folgende Inhalte: Kompatibilitätstabelle Neuheiten bei diesem Release Systemvoraussetzungen Wie bekomme ich die neue Version? Installation
Fortgeschrittenes Programmieren mit R. Christoph Beck. Di, 14:00-15:30 (3065)
") Christoph Beck Di, 14:00-15:30 (3065) Packages / Pakete in R Pakete in R Erweiterungen der (Basis)-Funktionalitäten in R Basis-Pakete Zusätzliche Pakete Base packages base Base R functions (and datasets
Christoph Beck Di, 14:00-15:30 (3065) Packages / Pakete in R Pakete in R Erweiterungen der (Basis)-Funktionalitäten in R Basis-Pakete Zusätzliche Pakete Base packages base Base R functions (and datasets
disigner Bedienungsanleitung Version 1.0, 26. Mai 2010
 www.egiz.gv.at E- Mail: post@egiz.gv.at Telefon: ++43 (316) 873 5514 Fax: ++43 (316) 873 5520 Inffeldgasse 16a / 8010 Graz / Austria disigner Bedienungsanleitung Version 1.0, 26. Mai 2010 Inhaltsverzeichnis:
www.egiz.gv.at E- Mail: post@egiz.gv.at Telefon: ++43 (316) 873 5514 Fax: ++43 (316) 873 5520 Inffeldgasse 16a / 8010 Graz / Austria disigner Bedienungsanleitung Version 1.0, 26. Mai 2010 Inhaltsverzeichnis:
Ein Beispiel. Ein Unternehmen will Internettechnologien im Rahmen des E- Business nutzen Welche Geschäftsprozesse?
 Ein Beispiel Ein Unternehmen will Internettechnologien im Rahmen des E- Business nutzen Welche Geschäftsprozesse? Dipl.-Kfm. Claus Häberle WS 2015 /16 # 42 XML (vereinfacht) visa
Ein Beispiel Ein Unternehmen will Internettechnologien im Rahmen des E- Business nutzen Welche Geschäftsprozesse? Dipl.-Kfm. Claus Häberle WS 2015 /16 # 42 XML (vereinfacht) visa
KONFIGURATIONSMANAGEMENT MIT PUPPET TIM SCHMELING. 4b:65:72:73:74:69:6e:2c:20:69:63:68:20:6c:69:65:62:65:20:64:69:63:68:21
 KONFIGURATIONSMANAGEMENT MIT PUPPET TIM SCHMELING 4b:65:72:73:74:69:6e:2c:20:69:63:68:20:6c:69:65:62:65:20:64:69:63:68:21 WAS IST PUPPET? SW für Konfigurationsmanagement Geschrieben in Ruby Client-Server
KONFIGURATIONSMANAGEMENT MIT PUPPET TIM SCHMELING 4b:65:72:73:74:69:6e:2c:20:69:63:68:20:6c:69:65:62:65:20:64:69:63:68:21 WAS IST PUPPET? SW für Konfigurationsmanagement Geschrieben in Ruby Client-Server
Release Notes scvenus 2.2.0
 Release Notes Juli 2005 IT Services Release Notes scvenus 2.2.0 Operational Concepts Security Solutions Was ist neu? Unterstützte Betriebssysteme Vertrieb E-Mail-Support / Mailinglisten Webportal / Schulung
Release Notes Juli 2005 IT Services Release Notes scvenus 2.2.0 Operational Concepts Security Solutions Was ist neu? Unterstützte Betriebssysteme Vertrieb E-Mail-Support / Mailinglisten Webportal / Schulung
4. Network Interfaces Welches verwenden? 5. Anwendung : Laden einer einfachen Internetseite 6. Kapselung von Paketen
 Gliederung 1. Was ist Wireshark? 2. Wie arbeitet Wireshark? 3. User Interface 4. Network Interfaces Welches verwenden? 5. Anwendung : Laden einer einfachen Internetseite 6. Kapselung von Paketen 1 1. Was
Gliederung 1. Was ist Wireshark? 2. Wie arbeitet Wireshark? 3. User Interface 4. Network Interfaces Welches verwenden? 5. Anwendung : Laden einer einfachen Internetseite 6. Kapselung von Paketen 1 1. Was
Aufbau eigener Cloud-Infrastrukturen mit Eucalyptus Hochschule Mannheim
 Andreas Ries Cloud-Computing Seminar Hochschule Mannheim WS0910 1/26 Aufbau eigener Cloud-Infrastrukturen mit Eucalyptus Hochschule Mannheim Andreas Ries Fakultät für Informatik Hochschule Mannheim ries.andreas@web.de
Andreas Ries Cloud-Computing Seminar Hochschule Mannheim WS0910 1/26 Aufbau eigener Cloud-Infrastrukturen mit Eucalyptus Hochschule Mannheim Andreas Ries Fakultät für Informatik Hochschule Mannheim ries.andreas@web.de
Studienprojekt HP-MOM
 Institute of Parallel and Distributed Systems () Universitätsstraße 38 D-70569 Stuttgart Studienprojekt HP-MOM High Performance Message Oriented Middleware 23. Januar 2013 Kurt Rothermel, Frank Dürr, Patrick
Institute of Parallel and Distributed Systems () Universitätsstraße 38 D-70569 Stuttgart Studienprojekt HP-MOM High Performance Message Oriented Middleware 23. Januar 2013 Kurt Rothermel, Frank Dürr, Patrick
Docker. Eine Einführung
 Docker Eine Einführung Inhalt Motivation Virtualisierung Docker Anwendung Fazit & Ausblick 2 von 21 Motivation Motivation Ziel: Sicherheit im Bereich der Webentwicklung Idee: Mehr Praxis Perspektivenwechsel
Docker Eine Einführung Inhalt Motivation Virtualisierung Docker Anwendung Fazit & Ausblick 2 von 21 Motivation Motivation Ziel: Sicherheit im Bereich der Webentwicklung Idee: Mehr Praxis Perspektivenwechsel
Projektseminar Parallele Programmierung
 HTW Dresden WS 2014/2015 Organisatorisches Praktikum, 4 SWS Do. 15:00-18:20 Uhr, Z136c, 2 Doppelstunden o.g. Termin ist als Treffpunkt zu verstehen Labore Z 136c / Z 355 sind Montag und Donnerstag 15:00-18:20
HTW Dresden WS 2014/2015 Organisatorisches Praktikum, 4 SWS Do. 15:00-18:20 Uhr, Z136c, 2 Doppelstunden o.g. Termin ist als Treffpunkt zu verstehen Labore Z 136c / Z 355 sind Montag und Donnerstag 15:00-18:20
ODK 1500S Standard Applikationen
 Übersicht ODK 1500S Standard Applikationen siemens.com/answers ODK 1500S Standard Applikationen Ready-to-use Add-Ons für Simatic Nutzer Erweiterung der S7-1500 Software Controller Funktionalität mit neuen
Übersicht ODK 1500S Standard Applikationen siemens.com/answers ODK 1500S Standard Applikationen Ready-to-use Add-Ons für Simatic Nutzer Erweiterung der S7-1500 Software Controller Funktionalität mit neuen
Systemmanagement mit Puppet und Foreman
 Systemmanagement mit Puppet und Foreman CeBIT 2016 17. März 2016 Mattias Giese System Management & Monitoring Architect B1 Systems GmbH giese@b1-systems.de B1 Systems GmbH - Linux/Open Source Consulting,
Systemmanagement mit Puppet und Foreman CeBIT 2016 17. März 2016 Mattias Giese System Management & Monitoring Architect B1 Systems GmbH giese@b1-systems.de B1 Systems GmbH - Linux/Open Source Consulting,
AUL22 Entdecken Sie die wichtigsten Vorteile einer PC basierenden HMI-Lösung
 AUL22 Entdecken Sie die wichtigsten Vorteile einer PC basierenden HMI-Lösung Automation University Special 2015 Roman Brasser Commercial Engineer IA rbrasser@ra.rockwell.com +41 62 889 77 78 Teo Löwe Commercial
AUL22 Entdecken Sie die wichtigsten Vorteile einer PC basierenden HMI-Lösung Automation University Special 2015 Roman Brasser Commercial Engineer IA rbrasser@ra.rockwell.com +41 62 889 77 78 Teo Löwe Commercial
Viewing Client Version 2.1.0.16
 Technische Mitteilung Deutsch Viewing Client Version 2.1.0.16 Version 1.0 / 2015-02-26 1 Zusammenfassung Dieses Dokument beinhaltet Informationen über Neuerungen und Änderungen, die mit der aktuellen Version
Technische Mitteilung Deutsch Viewing Client Version 2.1.0.16 Version 1.0 / 2015-02-26 1 Zusammenfassung Dieses Dokument beinhaltet Informationen über Neuerungen und Änderungen, die mit der aktuellen Version
Paketverwaltung und wichtige FOSS-Anwendungen
 Paketverwaltung und wichtige FOSS-Anwendungen Linux-Kurs der Unix-AG Zinching Dang 04./05. Juli 2012 Paketverwaltung und wichtige FOSS-Anwendungen FOSS-Anwendungen Anwendungsgebiete Desktop Büro-Anwendungen
Paketverwaltung und wichtige FOSS-Anwendungen Linux-Kurs der Unix-AG Zinching Dang 04./05. Juli 2012 Paketverwaltung und wichtige FOSS-Anwendungen FOSS-Anwendungen Anwendungsgebiete Desktop Büro-Anwendungen
Alexander Kiontke Routing Protokolle
 Überblick: Wieso brauchen Sensornetze eigene Routingprotokolle? Beispiele für Routingprotokolle Energy Aware Routing (EAR Energy Aware Data-Centric Routing (EAD Ad-Hoc On-Demand Distance Vector Routing
Überblick: Wieso brauchen Sensornetze eigene Routingprotokolle? Beispiele für Routingprotokolle Energy Aware Routing (EAR Energy Aware Data-Centric Routing (EAD Ad-Hoc On-Demand Distance Vector Routing
PaedIT Unternehmergesellschaft (haftungsbeschränkt) DNSControl GUI: Installation und Konfiguration
 DNSControl GUI: Installation und Konfiguration") PaedIT Unternehmergesellschaft (haftungsbeschränkt) DNSControl GUI: Installation und Konfiguration PaedIT 02.05.2010 1 Inhalt 1 Inhalt... 2 2 Vorwort... 3 3 Systemvoraussetzungen... 4 4 Installation auf
PaedIT Unternehmergesellschaft (haftungsbeschränkt) DNSControl GUI: Installation und Konfiguration PaedIT 02.05.2010 1 Inhalt 1 Inhalt... 2 2 Vorwort... 3 3 Systemvoraussetzungen... 4 4 Installation auf
ABB i-bus KNX. Software-Information. Melde- und Bedientableau. Typ: MT 701.2
 Produkt: Melde- und Bedientableau Typ: MT 701.2 Aktuelles Anwendungsprogramm Plug-In für ETS 2 MT_701_2_ETS2_SOW_xx_V1-12a_de_en.exe Plug-In für ETS 3 MT_701_2_ETS3_SOW_xx_V1-12a_de_en.exe EIBTAB: MT_701_2_EIBTAB_SOW_de_V2-08-00A_EibTab+Firmware.EXE
Produkt: Melde- und Bedientableau Typ: MT 701.2 Aktuelles Anwendungsprogramm Plug-In für ETS 2 MT_701_2_ETS2_SOW_xx_V1-12a_de_en.exe Plug-In für ETS 3 MT_701_2_ETS3_SOW_xx_V1-12a_de_en.exe EIBTAB: MT_701_2_EIBTAB_SOW_de_V2-08-00A_EibTab+Firmware.EXE
Virtualisierung unter GNU/Linux für Einsteiger
 Virtualisierung unter GNU/Linux für Einsteiger Edgar Fast Edi Hoffmann Community FreieSoftwareOG kontakt@freiesoftwareog.org 4. Oktober 2016 Virtualisierung Begriffserklärung 2 / 22 Virtualisierung Begriffserklärung
Virtualisierung unter GNU/Linux für Einsteiger Edgar Fast Edi Hoffmann Community FreieSoftwareOG kontakt@freiesoftwareog.org 4. Oktober 2016 Virtualisierung Begriffserklärung 2 / 22 Virtualisierung Begriffserklärung
Konzept / Architektur Diagramme
 Architektur-Modell Konzept / Architektur Diagramme Im Übergang Analyse Design wird das System konzipiert und seine Architektur entworfen: Subsystem-Modell (execution view) UML 1.x Package Diagram «subsystem»
Architektur-Modell Konzept / Architektur Diagramme Im Übergang Analyse Design wird das System konzipiert und seine Architektur entworfen: Subsystem-Modell (execution view) UML 1.x Package Diagram «subsystem»
Synchronisation des Temperatur-Loggers
 Synchronisation des Temperaturloggers Juni 10, 2010 1 / 7 Synchronisation des Temperatur-Loggers Einführung Zwei oder mehr Installationen der Temperaturlogger-Software können so zusammen geschaltet werden,
Synchronisation des Temperaturloggers Juni 10, 2010 1 / 7 Synchronisation des Temperatur-Loggers Einführung Zwei oder mehr Installationen der Temperaturlogger-Software können so zusammen geschaltet werden,
Hier folgt eine kurze Aufstellung über die verwendete Architekur. Die Angaben sind ohne Gewähr für Vollständigkeit oder vollständige Richtigkeit.
 1. ODBC 1.1 Problemstellung Die Informationen über die Microsoft SQL Server Datenbanken sind zur Zeit nicht auf der TIMD Website verfügbar. Der Grund ist, dass kein Interface zur Abfrage der benötigten
1. ODBC 1.1 Problemstellung Die Informationen über die Microsoft SQL Server Datenbanken sind zur Zeit nicht auf der TIMD Website verfügbar. Der Grund ist, dass kein Interface zur Abfrage der benötigten
Vorlesung 11: Netze. Sommersemester 2001. Peter B. Ladkin ladkin@rvs.uni-bielefeld.de
 Vorlesung 11: Netze Sommersemester 2001 Peter B. Ladkin ladkin@rvs.uni-bielefeld.de Vielen Dank an Andrew Tanenbaum der Vrije Universiteit Amsterdam für die Bilder Andrew Tanenbaum, Computer Networks,
Vorlesung 11: Netze Sommersemester 2001 Peter B. Ladkin ladkin@rvs.uni-bielefeld.de Vielen Dank an Andrew Tanenbaum der Vrije Universiteit Amsterdam für die Bilder Andrew Tanenbaum, Computer Networks,
Grafische Planung in der Freischaltabwicklung
 Grafische Planung in der Freischaltabwicklung Ab Release R/3 Enterprise 4.7, PLM Extension 1.1 WCM GmbH September 2008 Motivation Anforderung Die Planung von Freischaltungen kann durch ein grafisches Planungstool
Grafische Planung in der Freischaltabwicklung Ab Release R/3 Enterprise 4.7, PLM Extension 1.1 WCM GmbH September 2008 Motivation Anforderung Die Planung von Freischaltungen kann durch ein grafisches Planungstool
ROS IN DER INDUSTRIELLEN ANWENDUNG
 ROS IN DER INDUSTRIELLEN ANWENDUNG TECHNOLOGIESEMINAR 6. MÄRZ 2014 24. OKTOBER 2014 EINLEITENDE WORTE Das in der Forschung und Vorentwicklung etablierte Open Source»Robot Operating System«ROS bietet viele
ROS IN DER INDUSTRIELLEN ANWENDUNG TECHNOLOGIESEMINAR 6. MÄRZ 2014 24. OKTOBER 2014 EINLEITENDE WORTE Das in der Forschung und Vorentwicklung etablierte Open Source»Robot Operating System«ROS bietet viele
DIPLOMARBEIT. Entwurf und Implementierung eines modularen USB-Stacks für eingebettete Controller ohne Betriebssystem. Uwe Pfeiffer
 Fakultät Informatik Institut für Technische Informatik, Professur für VLSI-Entwurfssysteme, Diagnostik und Architektur DIPLOMARBEIT Entwurf und Implementierung eines modularen USB-Stacks für eingebettete
Fakultät Informatik Institut für Technische Informatik, Professur für VLSI-Entwurfssysteme, Diagnostik und Architektur DIPLOMARBEIT Entwurf und Implementierung eines modularen USB-Stacks für eingebettete
Message Oriented Middleware am Beispiel von XMLBlaster
 Message Oriented Middleware am Beispiel von XMLBlaster Vortrag im Seminar XML und intelligente Systeme an der Universität Bielefeld WS 2005/2006 Vortragender: Frederic Siepmann fsiepman@techfak.uni bielefeld.de
Message Oriented Middleware am Beispiel von XMLBlaster Vortrag im Seminar XML und intelligente Systeme an der Universität Bielefeld WS 2005/2006 Vortragender: Frederic Siepmann fsiepman@techfak.uni bielefeld.de
Pflichtenheft Programmanwendung "Syntax Tool"
 Projekt: Syntax Tool Autor: Michael Rattun Home: www.mrattun.de Letzte Änderung: 27.10.2011 1 SEITE Syntax Tool Inhaltsverzeichnis Inhaltsverzeichnis 1. Zielbestimmung... 3 1.1 Muss-Kriterien (Freeware)...
Projekt: Syntax Tool Autor: Michael Rattun Home: www.mrattun.de Letzte Änderung: 27.10.2011 1 SEITE Syntax Tool Inhaltsverzeichnis Inhaltsverzeichnis 1. Zielbestimmung... 3 1.1 Muss-Kriterien (Freeware)...
Sensorsimulation in Hardware in the Loop-Anwendungen
 Sensorsimulation in Hardware in the Loop-Anwendungen Kristian Trenkel, Florian Spiteller Echtzeit 2014 20.11.2014 Gliederung I. Einführung II. Problemstellung III. Anforderungen an eine Sensorsimulation
Sensorsimulation in Hardware in the Loop-Anwendungen Kristian Trenkel, Florian Spiteller Echtzeit 2014 20.11.2014 Gliederung I. Einführung II. Problemstellung III. Anforderungen an eine Sensorsimulation
Was ist neu in SIMATIC imap V2.0 SP1?
 s SIMATIC Produktinformation 08/2004 Diese Produktinformation enthält wichtige Informationen zu SIMATIC imap V2.0 SP1. Die Produktinformation ist Bestandteil des gelieferten Produkts und die darin enthaltenen
s SIMATIC Produktinformation 08/2004 Diese Produktinformation enthält wichtige Informationen zu SIMATIC imap V2.0 SP1. Die Produktinformation ist Bestandteil des gelieferten Produkts und die darin enthaltenen
UML (Unified Modelling Language) von Christian Bartl
 von Christian Bartl") UML (Unified Modelling Language) von Inhaltsverzeichnis Inhaltsverzeichnis... 2 1 UML Unified Modelling Language... 3 2 Diagrammtypen... 3 2.1 Aktivitätsdiagramm... 3 2.1.1 Notation... 4 2.1.2 Beispieldiagramm...
UML (Unified Modelling Language) von Inhaltsverzeichnis Inhaltsverzeichnis... 2 1 UML Unified Modelling Language... 3 2 Diagrammtypen... 3 2.1 Aktivitätsdiagramm... 3 2.1.1 Notation... 4 2.1.2 Beispieldiagramm...
716.091. Gerald Steinbauer Institut für Softwaretechnologie. Gerald Steinbauer. Konstruktion Mobiler Roboter, PR, WS11
 Konstruktion Mobiler Roboter 716.091 Institut für Softwaretechnologie 1 vergangene KMR Prokjekte 2 Grace Grace steht for Graz Robot Attending ConferencE inspiriert von AAAI Robot Challenge 2002 Aufgabe
Konstruktion Mobiler Roboter 716.091 Institut für Softwaretechnologie 1 vergangene KMR Prokjekte 2 Grace Grace steht for Graz Robot Attending ConferencE inspiriert von AAAI Robot Challenge 2002 Aufgabe
BOOTSTRAPPING. Lehrstuhl für Informatik 4 Verteilte Systeme und Betriebssysteme Universität Erlangen-Nürnberg
 BOOTSTRAPPING Lehrstuhl für Informatik 4 Verteilte Systeme und Betriebssysteme Universität Erlangen-Nürnberg 1/18 Überblick. 1. Einleitung 2. Initialisierung der Hardware 2.1 Bootstrap Programm 2.2 Bootprozess
BOOTSTRAPPING Lehrstuhl für Informatik 4 Verteilte Systeme und Betriebssysteme Universität Erlangen-Nürnberg 1/18 Überblick. 1. Einleitung 2. Initialisierung der Hardware 2.1 Bootstrap Programm 2.2 Bootprozess
Teil 1: So klappt die Umstellung auf Windows 10: Anwendungskonflikte automatisiert identifizieren und beheben
 Teil 1: So klappt die Umstellung auf Windows 10: Anwendungskonflikte automatisiert identifizieren und beheben 1 Präsentiert von Robert Müller Major Account Manager Flexera Software +49 176 13280916 rmueller@flexerasoftware.com
Teil 1: So klappt die Umstellung auf Windows 10: Anwendungskonflikte automatisiert identifizieren und beheben 1 Präsentiert von Robert Müller Major Account Manager Flexera Software +49 176 13280916 rmueller@flexerasoftware.com
HVS32. ein Versandsystem das immer passt. Dokumentation. SAP-IDoc Schnittstelle
 ein Versandsystem das immer passt Dokumentation SAP-IDoc Schnittstelle Inhalt 1 HVS32 Anbindung an SAP mit IDocs...2 1.1 Integration...2 1.1.1 HVS32...2 1.1.2 HVS32-Gateway...2 1.2 Ablauf...3 2 IDoc Typen...4
ein Versandsystem das immer passt Dokumentation SAP-IDoc Schnittstelle Inhalt 1 HVS32 Anbindung an SAP mit IDocs...2 1.1 Integration...2 1.1.1 HVS32...2 1.1.2 HVS32-Gateway...2 1.2 Ablauf...3 2 IDoc Typen...4
Übung zur Vorlesung Echtzeitsysteme
 Technische Universität München Fakultät für Informatik Forschungs- und Lehreinheit Informatik VI Übung zur Vorlesung Echtzeitsysteme Aufgabe 3 Nadine Keddis keddis@fortiss.org Stephan Sommer sommerst@in.tum.de
Technische Universität München Fakultät für Informatik Forschungs- und Lehreinheit Informatik VI Übung zur Vorlesung Echtzeitsysteme Aufgabe 3 Nadine Keddis keddis@fortiss.org Stephan Sommer sommerst@in.tum.de
Installation von gnuradio auf Ubuntu mit build-script. Zusammenfassung
 This line only printed with preprint option Installation von gnuradio auf Ubuntu mit build-script Matthias Renken Bremen Michael Hartje Hochschule Bremen, Bremen Zusammenfassung Die Installation von Gnuradio
This line only printed with preprint option Installation von gnuradio auf Ubuntu mit build-script Matthias Renken Bremen Michael Hartje Hochschule Bremen, Bremen Zusammenfassung Die Installation von Gnuradio
SharePoint Schnittstelle für Microsoft Dynamics CRM 2011
 SharePoint Schnittstelle für Microsoft Dynamics CRM 2011 Benutzerhandbuch zur SharePoint Schnittstelle für MS CRM 2011 Schnittstellenversion: 5.2.2 Dokumentenversion: 3.1 Inhalt 1. Vorwort... 4 2. Funktionsbeschreibung...
SharePoint Schnittstelle für Microsoft Dynamics CRM 2011 Benutzerhandbuch zur SharePoint Schnittstelle für MS CRM 2011 Schnittstellenversion: 5.2.2 Dokumentenversion: 3.1 Inhalt 1. Vorwort... 4 2. Funktionsbeschreibung...
Kurzanleitung. 29. Februar 2008 2. Oktober 2008 Update. APtool-Kurzanleitung-V1_2_DE Seite 1 von 8
 Kurzanleitung 29. Februar 2008 2. Oktober 2008 Update APtool-Kurzanleitung-V1_2_DE Seite 1 von 8 Inhalt INHALT... 2 EINFÜHRUNG... 3 VORBEREITUNG... 3 LIZENZIERUNG... 3 PROJEKT LIZENZEN... 4 GENERIERUNG
Kurzanleitung 29. Februar 2008 2. Oktober 2008 Update APtool-Kurzanleitung-V1_2_DE Seite 1 von 8 Inhalt INHALT... 2 EINFÜHRUNG... 3 VORBEREITUNG... 3 LIZENZIERUNG... 3 PROJEKT LIZENZEN... 4 GENERIERUNG
Hardware «Jinn» mit Doppel-Servos parallel bewegt.
 Hardware «Jinn» Höhe: 1060 mm Breite: 320 mm Gewicht: ca. 5.3 Kg Freiheitsgrade: 22 Tragkraft der Arme: ca. 200 g Akku: LiFe 2S 4.0 Ah 6.6 Volt Akku-Betriebsdauer: ca. 0,5 Std. Ein kleines Akkuladegerät
Hardware «Jinn» Höhe: 1060 mm Breite: 320 mm Gewicht: ca. 5.3 Kg Freiheitsgrade: 22 Tragkraft der Arme: ca. 200 g Akku: LiFe 2S 4.0 Ah 6.6 Volt Akku-Betriebsdauer: ca. 0,5 Std. Ein kleines Akkuladegerät
Isolierte Umgebungen für Python Anwendungen Teil 2. Christine Koppelt, Jürgen Schackmann, Stefan Seelmann
 Isolierte Umgebungen für Python Anwendungen Teil 2 Christine Koppelt, Jürgen Schackmann, Stefan Seelmann Grenzen von virtualenv Anwendungen bestehen neben Python aus einer Reihe weiterer Komponenten (zusätzliche
Isolierte Umgebungen für Python Anwendungen Teil 2 Christine Koppelt, Jürgen Schackmann, Stefan Seelmann Grenzen von virtualenv Anwendungen bestehen neben Python aus einer Reihe weiterer Komponenten (zusätzliche
Spezifikationen und Voraussetzung
 Projekt IGH DataExpert Paynet Adapter Spezifikationen Voraussetzungen Datum : 21.07.08 Version : 1.0.0.2 21.07.2008 Seite 1 von 7 Inhaltsverzeichnis 1 Einleitung... 3 2 Architektur... 3 2.1 Grundsätze
Projekt IGH DataExpert Paynet Adapter Spezifikationen Voraussetzungen Datum : 21.07.08 Version : 1.0.0.2 21.07.2008 Seite 1 von 7 Inhaltsverzeichnis 1 Einleitung... 3 2 Architektur... 3 2.1 Grundsätze
PCFaceSwitch. Treiber und Steuerprogramm für eine Extender-Karte für den PCI-Express-Bus
 PCFaceSwitch Treiber und Steuerprogramm für eine Extender-Karte für den PCI-Express-Bus Version 1.7 Juni 2013 Hinweise zur Installation, Funktionsweise und Lizenzierung Für Ihre Fragen stehen wir gern
PCFaceSwitch Treiber und Steuerprogramm für eine Extender-Karte für den PCI-Express-Bus Version 1.7 Juni 2013 Hinweise zur Installation, Funktionsweise und Lizenzierung Für Ihre Fragen stehen wir gern
Spezifikationen und Voraussetzung
 Projekt IGH DataExpert Yellowbill Adapter Spezifikationen Voraussetzungen Datum : 22.08.2013 Version : 1.0.0.2 22.08.2013 Seite 1 von 7 Inhaltsverzeichnis 1 Einleitung...3 2 Architektur...3 2.1 Grundsätze
Projekt IGH DataExpert Yellowbill Adapter Spezifikationen Voraussetzungen Datum : 22.08.2013 Version : 1.0.0.2 22.08.2013 Seite 1 von 7 Inhaltsverzeichnis 1 Einleitung...3 2 Architektur...3 2.1 Grundsätze
NanoCAN & NanoJEasy. Software training
 NanoCAN & NanoJEasy Software training NanoCAN NanoCAN ist ein nützliches Tool für: - Prüfung - Fehlersuche und -behebung - Firmware-Updates Unsere Steuerungen sind immer CAN-Slaves. Aus diesem Grund stehen
NanoCAN & NanoJEasy Software training NanoCAN NanoCAN ist ein nützliches Tool für: - Prüfung - Fehlersuche und -behebung - Firmware-Updates Unsere Steuerungen sind immer CAN-Slaves. Aus diesem Grund stehen
Was zum Teufel mache ich mit zehn Koordinaten gleichzeitig?!
 Was zum Teufel mache ich mit zehn Koordinaten gleichzeitig?! Das technische Konzept_ Das technische Konzept_ Das technische Konzept_ Die Toucherkennung_ Die Erkennung der Berührungspunkte (Blob-Tracking)
Was zum Teufel mache ich mit zehn Koordinaten gleichzeitig?! Das technische Konzept_ Das technische Konzept_ Das technische Konzept_ Die Toucherkennung_ Die Erkennung der Berührungspunkte (Blob-Tracking)
Zentrales Konfigurationsmanagement mit Puppet
 Zentrales Konfigurationsmanagement mit Puppet SLAC 2011 Martin Alfke Einführung Wie managed man 600 Linux-Server mit 20 unterschiedlichen Applikationen? Einführung Wie
Zentrales Konfigurationsmanagement mit Puppet SLAC 2011 Martin Alfke Einführung Wie managed man 600 Linux-Server mit 20 unterschiedlichen Applikationen? Einführung Wie
Neuerungen in FME 2015. Ein Überblick
 Neuerungen in FME 2015 Ein Überblick Releasezyklus FME 2015.0 FME 2015.1 FME 2015.2 FME 2015.3 Januar April Formate und Transformer Neue Formate (Auswahl) Esri ArcGIS Server Feature Service Reader CartoDB
Neuerungen in FME 2015 Ein Überblick Releasezyklus FME 2015.0 FME 2015.1 FME 2015.2 FME 2015.3 Januar April Formate und Transformer Neue Formate (Auswahl) Esri ArcGIS Server Feature Service Reader CartoDB
Regionaltreffen Rhein Main 26. März 2007
 Regionaltreffen Rhein Main 26. März 2007 SWE Jens Fudickar / OraTool pro Softwareentwicklung Jens Fudickar ist ein kleines Softwarehaus, dessen Hauptprodukt das OraTool ist. Darüber hinaus sind wir in
Regionaltreffen Rhein Main 26. März 2007 SWE Jens Fudickar / OraTool pro Softwareentwicklung Jens Fudickar ist ein kleines Softwarehaus, dessen Hauptprodukt das OraTool ist. Darüber hinaus sind wir in
TSM-Client UNIX. Leibniz Supercomputing Centre Stephan Peinkofer peinkofer@lrz.de 1
 TSM-Client UNIX Leibniz Supercomputing Centre Stephan Peinkofer peinkofer@lrz.de 1 Agenda Allgemeines Installation Konfiguration Test Backup / Archive Restore / Retrieve Epilog 2 Allgemeines Unterstützte
TSM-Client UNIX Leibniz Supercomputing Centre Stephan Peinkofer peinkofer@lrz.de 1 Agenda Allgemeines Installation Konfiguration Test Backup / Archive Restore / Retrieve Epilog 2 Allgemeines Unterstützte
TechNote. Produkt: TWINFAX 7.0 (ab CD_24), TWINFAX 6.0 Modul: SMTP, T611, R3 Kurzbeschreibung: Briefpapier- und Mailbodyunterstützung
, TWINFAX 6.0 Modul: SMTP, T611, R3 Kurzbeschreibung: Briefpapier- und Mailbodyunterstützung") Produkt: TWINFAX 7.0 (ab CD_24), TWINFAX 6.0 Modul: SMTP, T611, R3 Kurzbeschreibung: Briefpapier- und Mailbodyunterstützung Diese Anleitung hilft Ihnen, das nachfolgend geschilderte Problem zu beheben.
Produkt: TWINFAX 7.0 (ab CD_24), TWINFAX 6.0 Modul: SMTP, T611, R3 Kurzbeschreibung: Briefpapier- und Mailbodyunterstützung Diese Anleitung hilft Ihnen, das nachfolgend geschilderte Problem zu beheben.