STM32 - GPIO und Timer - u
|
|
|
- Eike Brodbeck
- vor 6 Jahren
- Abrufe
Transkript
1 STM32 - GPIO und Timer u andy, florob, gordin, ike, meise, tobix, zakx e.v. Cologne
2 1 GPIO GPIOs Interrupts durch GPIOs 2 Timer Timer PWM 3 Aufgaben Aufgaben
3 GPIOs GPIO GPIO = General Purpose Input/Output = durch Software wackelnde Pins am Mikrocontroller Kennen zwei Modi: Input und Output Standardkonfiguration eines Pins = GPIO Input STM32F4 hat GPIOA bis GPIOI mit je 16 Pins (ne Menge!) Als Vergleich Atmega32: GPIOA bis GPIOD mit je 8 Pins
4 GPIOs Konfiguration Der Kram muss konfiguriert werden: GPIO_InitTypeDef GPIO_InitStructure; /* Enable the GPIO_LED Clock */ RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE); /* Configure the GPIO_LED pins */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12 GPIO_Pin_13 GPIO_Pin_14 GPIO_Pin_15; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOD, &GPIO_InitStructure);
5 GPIOs Der Reihe nach (1) Clock einschalten, damit der GPIO-Kern irgendwas tut: /* Enable the GPIO Clock */ RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE);
6 GPIOs Der Reihe nach (2) Wir konfigurieren hier Pins 12 bis GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12 GPIO_Pin_13 GPIO_Pin_14 GPIO_Pin_15;... als Ausgänge... GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;... im Modus Push/Pull... GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
7 GPIOs Der Reihe nach (2) Wir konfigurieren hier Pins 12 bis GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12 GPIO_Pin_13 GPIO_Pin_14 GPIO_Pin_15;... als Ausgänge... GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;... im Modus Push/Pull... GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
8 GPIOs Der Reihe nach (2) Wir konfigurieren hier Pins 12 bis GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12 GPIO_Pin_13 GPIO_Pin_14 GPIO_Pin_15;... als Ausgänge... GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;... im Modus Push/Pull... GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
9 GPIOs Der Reihe nach (3)... mit aktiviertem Pullup (eigentlich sinnfrei bei Push-Pull-Ausgängen)... GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;... und max. 50 MHz Geschwindigkeit. GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; BÄM! GPIO_Init(GPIOD, &GPIO_InitStructure);
10 GPIOs Der Reihe nach (3)... mit aktiviertem Pullup (eigentlich sinnfrei bei Push-Pull-Ausgängen)... GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;... und max. 50 MHz Geschwindigkeit. GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; BÄM! GPIO_Init(GPIOD, &GPIO_InitStructure);
11 GPIOs Der Reihe nach (3)... mit aktiviertem Pullup (eigentlich sinnfrei bei Push-Pull-Ausgängen)... GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;... und max. 50 MHz Geschwindigkeit. GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; BÄM! GPIO_Init(GPIOD, &GPIO_InitStructure);
12 GPIOs Pins nutzen So setzt man Pins: GPIO_SetBits(GPIOD, GPIO_Pin_12 GPIO_Pin_15); So löscht man Pins: GPIO_ResetBits(GPIOD, GPIO_Pin_13 GPIO_Pin_14); So liest man Pins: if(gpio_readinputdatabit(gpioa, GPIO_Pin_0) == Bit_SET) {... } Noch mehr, lest das mal selbst nach: stm32f4xx_gpio.h
13 GPIOs Pins nutzen So setzt man Pins: GPIO_SetBits(GPIOD, GPIO_Pin_12 GPIO_Pin_15); So löscht man Pins: GPIO_ResetBits(GPIOD, GPIO_Pin_13 GPIO_Pin_14); So liest man Pins: if(gpio_readinputdatabit(gpioa, GPIO_Pin_0) == Bit_SET) {... } Noch mehr, lest das mal selbst nach: stm32f4xx_gpio.h
14 GPIOs Pins nutzen So setzt man Pins: GPIO_SetBits(GPIOD, GPIO_Pin_12 GPIO_Pin_15); So löscht man Pins: GPIO_ResetBits(GPIOD, GPIO_Pin_13 GPIO_Pin_14); So liest man Pins: if(gpio_readinputdatabit(gpioa, GPIO_Pin_0) == Bit_SET) {... } Noch mehr, lest das mal selbst nach: stm32f4xx_gpio.h
15 GPIOs Pullup/down Widerstände Annahme: Wir klemmen einen Schalter an einen Input an. 1 Welchen Pegel hat der Mikrocontrollerpin, wenn der Schalter geschlossen ist? 2 Welchen Pegel hat der Mikrocontrollerpin, wenn der Schalter offen ist?
16 GPIOs Pullup-Widerstand 1 Welchen Pegel hat der Mikrocontrollerpin, wenn der Schalter geschlossen ist? 2 Welchen Pegel hat der Mikrocontrollerpin, wenn der Schalter offen ist?
17 GPIOs Pulldown-Widerstand 1 Welchen Pegel hat der Mikrocontrollerpin, wenn der Schalter geschlossen ist? 2 Welchen Pegel hat der Mikrocontrollerpin, wenn der Schalter offen ist?
18 GPIOs Pinmodi GPIO_Mode ist ziemlich selbsterklärend: GPIO_Mode_IN Input GPIO_Mode_OUT Output GPIO_Mode_AF Auxiliary Function GPIO_Mode_AN Analog Input
19 GPIOs Pinmodi GPIO_OType (O = Output) kennt nur zwei Modi: GPIO_OType_PP Push/Pull = hartes ziehen oder drücken auf 0V oder 3,3V GPIO_OType_OD OpenDrain = hartes ziehen auf 0V oder hochohmig (mit Pullup dann plötzlich high)
20 GPIOs Pinmodi GPIO_PuPd kümmert sich um die Pullups/Downs: GPIO_PuPd_NOPULL Kein Pullup/down GPIO_PuPd_UP Pullup an GPIO_PuPd_DOWN Pulldown an
21 Interrupts durch GPIOs GPIO Interrupts Anstatt die ganze Zeit die Pins abzufragen, ob da was passiert ist, können sie auch Interrupts werfen. Sample dazu ist 04_gpiointerrupt.
22 Interrupts durch GPIOs GPIO Interrupts Pin konfigurieren wie sonst auch. PA0 ist der User-Button, auf der Platine ist ein Pullup-Widerstand. Bonuspunkte für Leute die ihn mir im Schaltplan raussuchen und mir sagen wie er heisst und wie groß er ist. //Clock einschalten RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); // Pinmodus konfigurieren GPIO_Init(GPIOA, &(GPIO_InitTypeDef){.GPIO_Speed = GPIO_Speed_50MHz,.GPIO_Mode = GPIO_Mode_IN,.GPIO_OType = GPIO_OType_PP,.GPIO_PuPd = GPIO_PuPd_NOPULL, //no internal pullup or pulldown, is present on PCB.GPIO_Pin = GPIO_Pin_0 });
23 Interrupts durch GPIOs GPIO Interrupts GPIO Interrupts werden durch den EXTI-Kern behandelt. Konfigurieren... EXTI_Init(&(EXTI_InitTypeDef){.EXTI_Line = EXTI_Line0,.EXTI_Mode = EXTI_Mode_Interrupt,.EXTI_Trigger = EXTI_Trigger_Rising,.EXTI_LineCmd = ENABLE }); Was geht da? Ich bin faul findet das zur Abwechslung mal selbst raus ;) STM32 Reference Manual Page 199ff
24 Interrupts durch GPIOs GPIO Interrupts Nur soviel: So: Es gibt 16 Leitungen im Chip: EXTI0 bis EXTI15 An EXTI0 hängen: PA0, PB0, PC0, PD0,..., PI0 An EXTI1 hängen: PA1, PB1, PC1, PD1,..., PI1... klar, oder? Wir haben hier aber EXTI0 konfiguriert. Wie kriegen wir jetzt also PA0 and EXTI0? SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOA, EXTI_PinSource0);
25 Interrupts durch GPIOs GPIO Interrupts Nur soviel: So: Es gibt 16 Leitungen im Chip: EXTI0 bis EXTI15 An EXTI0 hängen: PA0, PB0, PC0, PD0,..., PI0 An EXTI1 hängen: PA1, PB1, PC1, PD1,..., PI1... klar, oder? Wir haben hier aber EXTI0 konfiguriert. Wie kriegen wir jetzt also PA0 and EXTI0? SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOA, EXTI_PinSource0);
26 Interrupts durch GPIOs GPIO Interrupts Als letztes müssen wir den Interrupt im Interrupt-Controller noch einschalten: NVIC_Init(&(NVIC_InitTypeDef){.NVIC_IRQChannel = EXTI0_IRQn,.NVIC_IRQChannelPreemptionPriority = 0x00,.NVIC_IRQChannelSubPriority = 0x00,.NVIC_IRQChannelCmd = ENABLE });
27 Interrupts durch GPIOs GPIO Interrupts Und so sieht die Interruptroutine aus: void EXTI0_IRQHandler() { //huh? You talking to me? if(exti_getitstatus(exti_line0)!= RESET) { GPIO_ToggleBits(GPIOD, GPIO_Pin_12 GPIO_Pin_13 GPIO_Pin_14 GPIO_Pin_15); } } //Clear the interrupt bit and tell the controller we handled the interrupt EXTI_ClearITPendingBit(EXTI_Line0);
28 Interrupts durch GPIOs GPIO Interrupts War viel? Keine Sorge, guckt ins Example 01 bis 04. Da steht alles kommentiert und zusammen in jeweils einem File.
29 Timer Timer Timer sind vom Konzept her relativ einfach, aber durch die vielfältigen Anwendungsgebiete doch relativ komplexe Biester Deswegen werden wir hier das Thema nur kurz anschneiden (wie leider fast alles -_-) Ich beherrsche auch nicht alle Modi auswendig, mit Grundverständnis und etwas Googlen + Datasheets kommt man aber ganz gut hin Timer sind simpel: Sie haben ein x Bit breites Register und bei jedem Auftreten eines Clockimpulses wird das register inkrementiert Kühles Howto zum nachlesen:
30 Timer Timer Annahme: 16 Bit Timer, 40 MHz Clock, wie lange tickt das Ding, bis es überläuft? 2 16 = 65536, Wertebereich des Timers als 0 bis MHz = Ticks pro Sekunde = Hz Der Timer inkrementiert also pro Sekunde Damit läuft der Timer als MHz/65536 = 610, pro Sekunde über Somit ist 1s/610, = 0, s = 1, 6384ms Würde man also einen 16 Bit Timer mit 40MHz von 0 an laufen lassen, hat man einen Überlauf alle 1,6384ms Rechnet mal, wie lange ein 32 Bit Timer bei 100 MHz braucht, bis der überläuft!
31 Timer Timer Annahme: 16 Bit Timer, 40 MHz Clock, wie lange tickt das Ding, bis es überläuft? 2 16 = 65536, Wertebereich des Timers als 0 bis MHz = Ticks pro Sekunde = Hz Der Timer inkrementiert also pro Sekunde Damit läuft der Timer als MHz/65536 = 610, pro Sekunde über Somit ist 1s/610, = 0, s = 1, 6384ms Würde man also einen 16 Bit Timer mit 40MHz von 0 an laufen lassen, hat man einen Überlauf alle 1,6384ms Rechnet mal, wie lange ein 32 Bit Timer bei 100 MHz braucht, bis der überläuft!
32 Timer Timer Annahme: 16 Bit Timer, 40 MHz Clock, wie lange tickt das Ding, bis es überläuft? 2 16 = 65536, Wertebereich des Timers als 0 bis MHz = Ticks pro Sekunde = Hz Der Timer inkrementiert also pro Sekunde Damit läuft der Timer als MHz/65536 = 610, pro Sekunde über Somit ist 1s/610, = 0, s = 1, 6384ms Würde man also einen 16 Bit Timer mit 40MHz von 0 an laufen lassen, hat man einen Überlauf alle 1,6384ms Rechnet mal, wie lange ein 32 Bit Timer bei 100 MHz braucht, bis der überläuft!

33 Timer Timer Quelle:
34 Timer Timer Allgemeine Formeln tickdauer = 1 timerfrequenz zeitbisüberlauf = zählschritte tickdauer Die Dinger sind so einfach, dass man sich die mit etwas Übung auch schnell selbst herleiten kann.
35 Timer STM32 Timer Welche Timer haben wir denn und wie schnell ticken die wirklich? Dieses clocking Excelsheet in docs/ verrät euch das TIM 1 und 8: 16 Bit TIM 2 bis 5: 16 Bit und 32 Bit TIM 9 bis 14: 16 Bit TIM 6 und 7: 16 Bit Verschiedene Timer haben verschiedene Features Wie immer alles im Datasheet
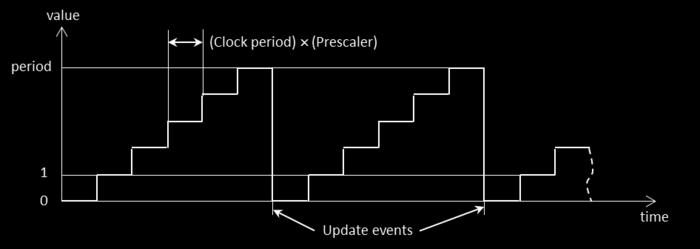
36 Timer Timer konfigurieren Wir konfigurieren mal einen Timer im sogenannten TimeBase Modus (geklaut aus 05_ledpwm). //Enable Timer 4 clock RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //We want the timer to tick with a frequency of 1MHz, calculate a prescaler uint32_t PrescalerValue = (uint16_t) ((SystemCoreClock / 2) / ) - 1; //20 khz PWM period (i.e. 50uS period) uint32_t period = / 20000; //Configure the timer TIM_TimeBaseInit(TIM4, &(TIM_TimeBaseInitTypeDef){.TIM_Period = period - 1,.TIM_Prescaler = PrescalerValue,.TIM_ClockDivision = 0,.TIM_CounterMode = TIM_CounterMode_Up, }); Das Ding tickt einfach nur mit der angegebenen Frequenz vor sich hin. Mehr passiert da nicht.
37 Timer Timer konfigurieren Als letztes noch den Timer starten: TIM_Cmd(TIM4, ENABLE); Tick, tack... Aktuellen Tickwert holen: TIM_GetCounter(TIM4);
38 Timer Timer konfigurieren Als letztes noch den Timer starten: TIM_Cmd(TIM4, ENABLE); Tick, tack... Aktuellen Tickwert holen: TIM_GetCounter(TIM4);
39 PWM PWM Jetzt, wo wir wissen, wie Timer generell funktionieren, lassen wir mal LEDs flackern Helligkeit von LEDs wird über PWM (= Pulse Width Modulation = Pulsweitenmodulation) ermöglicht Zu gut Deutsch: LED ist X% der Gesamtzeit an und 100%-X% der Gesamtzeit aus
40 PWM PWM Fürs messen von Zeiten nehmen wir immer Timer auf einem Mikrocontroller Wir machen die LED an, fangen bei 0 an zu Zählen und warten etwas Wenn der Timer einen gewissen Wert erreicht hat (= gewisse Zeit verstrichen ist), machen wir die LED wieder aus und warten, bis der Timer überläuft Wenn man das schnell genug macht, sieht man das als Mensch durch die Trägheit der Augen nichtmal Repeat... Easy, oder?
41 PWM PWM Fürs messen von Zeiten nehmen wir immer Timer auf einem Mikrocontroller Wir machen die LED an, fangen bei 0 an zu Zählen und warten etwas Wenn der Timer einen gewissen Wert erreicht hat (= gewisse Zeit verstrichen ist), machen wir die LED wieder aus und warten, bis der Timer überläuft Wenn man das schnell genug macht, sieht man das als Mensch durch die Trägheit der Augen nichtmal Repeat... Easy, oder?
42 PWM PWM Rechenbeispiel: Eine Timerperiode ist 50µS lang Angenommen der Timer zählt innerhalb dieser 50µS immer bis 50 und wird dann wieder auf 0 zurückgesetzt und wir setzen den OutputCompare auf 25, ist 50% der Zeit die LED an, sonst aus Bei 10 wären das 5µS an und den die Restlichen 45µS aus
43 PWM Output Compare Config Ich kopier mal wieder Code (05_ledpwm): //PD12 auf Alternate Function legen (Achtung! Bei GPIO Config auch AF als Mode angeben!) GPIO_PinAFConfig(GPIOD, GPIO_PinSource12, GPIO_AF_TIM4); //Timer konfigurieren, so das er passend tickt <...> TIM_OCInitTypeDef TIM_OCInitStructure; TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_Pulse = 0; TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; // PWM1 Mode configuration: Channel1 (GPIOD Pin 12) TIM_OC1Init(TIM4, &TIM_OCInitStructure); TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable); // Comparewert setzen TIM_SetCompare1(TIM4, 10);
44 Aufgaben GPIO-Aufgaben 1 Versucht mal selbst die LEDs zum Blinken zu bringen (also selbst Pinmodi konfigurieren etc.) 2 Versucht mal den Input für den Userbutton richtig zu konfigurieren und Dinge damit zu tun 3 Probiert auch mal die Interrupts aus 4 Was fällt euch auf, wenn ihr den Taster drückt? Wie oft wird eure programmierte Aktion pro Druck ausgelöst? 5 Behebt das festgestellte Problem (entprellen)! Wie ist mir egal.
45 Aufgaben Timer-Aufgaben 1 Konfiguriert mal einen Timer im TimeBase-Mode und lasst ihn mit einer von euch festgelegten Frequenz ticken (also ohne Output Compare oder son Kram, nur der Timer) 2 Wenn das geht, könnt ihr in einer Schleife regelmäßig den Wert auslesen und ab einem Schwellwert ne LED an- und ausschalten -> Blinkerei! (siehe auch: 3 Spielt mal mit den Comparewerten in dem LED-PWM example und guckt was sich ändert. Ich komm dann mal mit nem Logicanalyzer rum und zeig auch live wie das aussieht.
46 Aufgaben Timer-Aufgaben 4 Wenn es euch interessiert, stellt den Timer mal so ein, dass er alle x Millisekunden überläuft und probiert mal in einem zweiten Schritt einen Interrupt bei einem Timer-Overflow zu erzeugen (Hints: TIM_ITConfig(), TIMx_IRQHandler(), TIM_ClearITPendingBit(), TIM_GetITStatus()). Damit könnt ihr jetzt relativ genau Zeit messen und wisst, wie die Delay()-Funktion funktioniert
47 Aufgaben Sonstiges Letztes mal wollte jemand wissen, was das EVENTOUT das bei den meisten Pins als auxiliary function zu sehen war bedeutet. Hier stehts: /what-is-the-stm32-event-eventout Spielt mal damit, wenn ihr Lust habt, das hört sich lustig an!
Vergleich der einfachen IO Funktionen von 8 Bit Atmel AVR und 32 Bit ST32Fxxx ARM Mikrocontroller Juni 2013 A.Schnell
 Vergleich der einfachen IO Funktionen von 8 Bit Atmel AVR und 32 Bit ST32Fxxx ARM Mikrocontroller Juni 2013 A.Schnell Für einen neuen Mikrocontroller muss als erstes die Entwicklungsumgebung auf dem jeweiligen
Vergleich der einfachen IO Funktionen von 8 Bit Atmel AVR und 32 Bit ST32Fxxx ARM Mikrocontroller Juni 2013 A.Schnell Für einen neuen Mikrocontroller muss als erstes die Entwicklungsumgebung auf dem jeweiligen
STM32 - Schieberegister, SPI - u
 STM32 - Schieberegister, u23 2013 andy, florob, gordin, ike, meise, tobix, zakx e.v. http://koeln.ccc.de Cologne 2013-11-04 STM32 - Schieberegister, - u23 2013 1 Schieberegister Schieberegister Codebeispiel
STM32 - Schieberegister, u23 2013 andy, florob, gordin, ike, meise, tobix, zakx e.v. http://koeln.ccc.de Cologne 2013-11-04 STM32 - Schieberegister, - u23 2013 1 Schieberegister Schieberegister Codebeispiel
AVR-Mikrocontroller in BASCOM programmieren, Teil 3
 jean-claude.feltes@education.lu 1/8 AVR-Mikrocontroller in BASCOM programmieren, Teil 3 Alle Beispiele in diesem Kapitel beziehen sich auf den Mega8. Andere Controller können unterschiedliche Timer haben.
jean-claude.feltes@education.lu 1/8 AVR-Mikrocontroller in BASCOM programmieren, Teil 3 Alle Beispiele in diesem Kapitel beziehen sich auf den Mega8. Andere Controller können unterschiedliche Timer haben.
Für den CTC-Mode kann demnach TCCR1A komplett auf 0 gesetzt werden, weil WGM11 und WGM10 in diesem Register liegen und beide laut Tabelle 0 sind:
 Timerinterrupts beim Arduino Timer 1 (16bit) Register: Bits in den Registern und ihre Bedeutung: Für den CTC-Mode kann demnach TCCR1A komplett auf 0 gesetzt werden, weil WGM11 und WGM10 in diesem Register
Timerinterrupts beim Arduino Timer 1 (16bit) Register: Bits in den Registern und ihre Bedeutung: Für den CTC-Mode kann demnach TCCR1A komplett auf 0 gesetzt werden, weil WGM11 und WGM10 in diesem Register
Puls Weiten Modulation (PWM)
") Puls Weiten Modulation (PWM) Bei der Puls-Weiten-Modulation (PWM), wird ein digitales Ausgangssignal erzeugt, dessen Tastverhältnis moduliert wird. Das Tastverhältnis gibt das Verhältnis der Länge des
Puls Weiten Modulation (PWM) Bei der Puls-Weiten-Modulation (PWM), wird ein digitales Ausgangssignal erzeugt, dessen Tastverhältnis moduliert wird. Das Tastverhältnis gibt das Verhältnis der Länge des
16-Bit PCA Timer/Counter
 4.5.1 Programmable Counter Array (PCA) Das Programmable Counter Array besteht aus fünf PCA-Modulen, die einen gemeinsamen 16- Bit Timer/Counter als Zeitbasis verwenden. ECI: Externer Clock-Eingang für
4.5.1 Programmable Counter Array (PCA) Das Programmable Counter Array besteht aus fünf PCA-Modulen, die einen gemeinsamen 16- Bit Timer/Counter als Zeitbasis verwenden. ECI: Externer Clock-Eingang für
Timer. Funktionsprinzip
 Timer Funktionsprinzip 8-Bit-Timer des ATmega28 Beispiel Timer im Polling- und Interrupt-Betrieb Funktionsprinzip Timer ist ein in Hardware realisierter i Zähler ändert seinen Zählerstand mit einer vorgegebenen
Timer Funktionsprinzip 8-Bit-Timer des ATmega28 Beispiel Timer im Polling- und Interrupt-Betrieb Funktionsprinzip Timer ist ein in Hardware realisierter i Zähler ändert seinen Zählerstand mit einer vorgegebenen
STM32breakoutV2. [ Manual ]
![STM32breakoutV2. [ Manual ]](/thumbs/78/76809822.jpg "STM32breakoutV2. [ Manual ]") STM32breakoutV2 Dokument: 1.0 Alpha, Hardware 14/2, ED14101 STM32 BreakoutboardV2 - Fx-Serie [ Manual ] Version mit STM32F105RBT6 Autor: C. Hediger, 08.11.2014 Inhaltsverzeichnis 1. Einleitung... 3 2.
STM32breakoutV2 Dokument: 1.0 Alpha, Hardware 14/2, ED14101 STM32 BreakoutboardV2 - Fx-Serie [ Manual ] Version mit STM32F105RBT6 Autor: C. Hediger, 08.11.2014 Inhaltsverzeichnis 1. Einleitung... 3 2.
Serie 8: Microcontroller 17./18.07.2014
 Serie 8: Microcontroller 17./18.07.2014 I. Ziel der Versuche Erster Erfahrungen mit einem Microcontroller sollen gesammelt werden, die grundlegenden Ein- Ausgabe-Operationen werden realisiert. II. Vorkenntnisse
Serie 8: Microcontroller 17./18.07.2014 I. Ziel der Versuche Erster Erfahrungen mit einem Microcontroller sollen gesammelt werden, die grundlegenden Ein- Ausgabe-Operationen werden realisiert. II. Vorkenntnisse
Eingaben. Themen heute. Taster. Eingaben Zuweisungen Zeitmessung. Programmieren für Ingenieure Sommer Andreas Zeller, Universität des Saarlandes
 Eingaben Programmieren für Ingenieure Sommer 2015 Andreas Zeller, Universität des Saarlandes Themen heute Eingaben Zuweisungen Zeitmessung Taster Wikipedia Ziel Wenn Taste gedrückt, soll LED leuchten Wir
Eingaben Programmieren für Ingenieure Sommer 2015 Andreas Zeller, Universität des Saarlandes Themen heute Eingaben Zuweisungen Zeitmessung Taster Wikipedia Ziel Wenn Taste gedrückt, soll LED leuchten Wir
Lösungen zum Kurs "Mikrocontroller Hard- und Software
 Lösungen zum Kurs "Mikrocontroller Hard- und Software Gerhard Schmidt Kastanienallee 20 64289 Darmstadt http://www.avr-asm-tutorial.net Lösung Aufgabe 2 Aufgabe 2 sbi DDRB,PB0 2 Takte sbi PORTB,PB0 2 Takte
Lösungen zum Kurs "Mikrocontroller Hard- und Software Gerhard Schmidt Kastanienallee 20 64289 Darmstadt http://www.avr-asm-tutorial.net Lösung Aufgabe 2 Aufgabe 2 sbi DDRB,PB0 2 Takte sbi PORTB,PB0 2 Takte
Microcontroller Kurs Programmieren. 09.10.11 Microcontroller Kurs/Johannes Fuchs 1
 Microcontroller Kurs Programmieren 9.1.11 Microcontroller Kurs/Johannes Fuchs 1 General Purpose Input Output (GPIO) Jeder der Pins der vier I/O Ports kann als Eingabe- oder Ausgabe-leitung benutzt werden.
Microcontroller Kurs Programmieren 9.1.11 Microcontroller Kurs/Johannes Fuchs 1 General Purpose Input Output (GPIO) Jeder der Pins der vier I/O Ports kann als Eingabe- oder Ausgabe-leitung benutzt werden.
The amforth Cookbook angefangen
 The amforth Cookbook Author: Datum: Erich Wälde 2009-02-22 angefangen 2 Inhaltsverzeichnis 1 Projekt mit ATMEGA 32 5 1.1 Board................................ 5 1.2 Beispiel Applikation........................
The amforth Cookbook Author: Datum: Erich Wälde 2009-02-22 angefangen 2 Inhaltsverzeichnis 1 Projekt mit ATMEGA 32 5 1.1 Board................................ 5 1.2 Beispiel Applikation........................
Interrupt-Programmierung
 Interrupt-Programmierung Am Beispiel des ATMEGA16 Microcontrollers Beispiel: Messung der Betriebszeit Die Betriebszeit zeigt an, wie lange der Rechner seit dem Booten läuft Hier: Aktualisierung der Betriebszeit
Interrupt-Programmierung Am Beispiel des ATMEGA16 Microcontrollers Beispiel: Messung der Betriebszeit Die Betriebszeit zeigt an, wie lange der Rechner seit dem Booten läuft Hier: Aktualisierung der Betriebszeit
analoge Ein- und Ausgänge
 2016/07/17 13:39 1/5 analoge Ein- und Ausgänge analoge Ein- und Ausgänge Neben den digitalen Leitungen bietet der Arduino mehrere analoge Ein- und Ausgänge. analoge Ausgänge Die Ausgänge sind mit PWM bezeichnet.
2016/07/17 13:39 1/5 analoge Ein- und Ausgänge analoge Ein- und Ausgänge Neben den digitalen Leitungen bietet der Arduino mehrere analoge Ein- und Ausgänge. analoge Ausgänge Die Ausgänge sind mit PWM bezeichnet.
C++ mit dem Arduino (Uno und Mega2560)
") C++ mit dem Arduino (Uno und Mega2560) 1. Toolchain Als toolchain bezeichnet man die Reihe von Software, die nötig ist um den Prozessor zu programmieren, das Ergebnis draufzuladen und dann zu testen. Hier
C++ mit dem Arduino (Uno und Mega2560) 1. Toolchain Als toolchain bezeichnet man die Reihe von Software, die nötig ist um den Prozessor zu programmieren, das Ergebnis draufzuladen und dann zu testen. Hier
C++ mit dem Arduino (Uno und Mega2560)
") C++ mit dem Arduino (Uno und Mega2560) 1. Toolchain Als toolchain bezeichnet man die Reihe von Software, die nötig ist um den Prozessor zu programmieren, das Ergebnis draufzuladen und dann zu testen. Hier
C++ mit dem Arduino (Uno und Mega2560) 1. Toolchain Als toolchain bezeichnet man die Reihe von Software, die nötig ist um den Prozessor zu programmieren, das Ergebnis draufzuladen und dann zu testen. Hier
mystm32 Lehrbuch Ein Lehrbuch für die praxisorientierte Einführung in die Programmierung von ARM-Mikrocontrollern
 Sven Löbmann Toralf Riedel Alexander Huwaldt mystm32 Lehrbuch Ein Lehrbuch für die praxisorientierte Einführung in die Programmierung von ARM-Mikrocontrollern Leseprobe Die Informationen in diesem Produkt
Sven Löbmann Toralf Riedel Alexander Huwaldt mystm32 Lehrbuch Ein Lehrbuch für die praxisorientierte Einführung in die Programmierung von ARM-Mikrocontrollern Leseprobe Die Informationen in diesem Produkt
Autonome Mobile Systeme. Dr. Stefan Enderle
 Autonome Mobile Systeme Dr. Stefan Enderle 2. Mikrocontroller Einleitung Unterschied Controller / Prozessor: Speicher (RAM, Flash, Eprom) intern Viele I/Os (Digital, Analog) Bus-Unterstützung (Seriell,
Autonome Mobile Systeme Dr. Stefan Enderle 2. Mikrocontroller Einleitung Unterschied Controller / Prozessor: Speicher (RAM, Flash, Eprom) intern Viele I/Os (Digital, Analog) Bus-Unterstützung (Seriell,
Erzeugen von PWM-Signalen mit dem Atmel AVR-Mikrocontroller
 Fachbereich Elektrotechnik und Informatik Labor für Angewandte Informatik und Datenbanken Praktikum Automatisierung/Echtzeitregelung (BAU/BER) Prof.Dr.-Ing. Coersmeier Erzeugen von PWM-Signalen mit dem
Fachbereich Elektrotechnik und Informatik Labor für Angewandte Informatik und Datenbanken Praktikum Automatisierung/Echtzeitregelung (BAU/BER) Prof.Dr.-Ing. Coersmeier Erzeugen von PWM-Signalen mit dem
Tag 2 Eingabe und Interrupts
 Tag 2 Eingabe und Interrupts 08/30/10 Fachbereich Physik Institut für Kernphysik Bastian Löher, Martin Konrad 1 Taster Direkt an Portpin angeschlossen (etwa PINB0, PIND3) Pull-Up-Widerstände einschalten!
Tag 2 Eingabe und Interrupts 08/30/10 Fachbereich Physik Institut für Kernphysik Bastian Löher, Martin Konrad 1 Taster Direkt an Portpin angeschlossen (etwa PINB0, PIND3) Pull-Up-Widerstände einschalten!
AVR-Mikrocontroller in BASCOM programmieren, Teil 2
 jean-claude.feltes@education.lu 1 AVR-Mikrocontroller in BASCOM programmieren, Teil 2 13. Interrupts 13.1 Externe Interrupts durch Taster Wenn Taster mittels Polling abgefragt werden, wie in Teil 1 beschrieben,
jean-claude.feltes@education.lu 1 AVR-Mikrocontroller in BASCOM programmieren, Teil 2 13. Interrupts 13.1 Externe Interrupts durch Taster Wenn Taster mittels Polling abgefragt werden, wie in Teil 1 beschrieben,
myavr Programmierung in C
 myavr Programmierung in C Stefan Goebel Februar 2017 Stefan Goebel myavr Programmierung in C Februar 2017 1 / 12 Grundgerüst... braucht man immer! #include // Register- und Konstantendefinitionen
myavr Programmierung in C Stefan Goebel Februar 2017 Stefan Goebel myavr Programmierung in C Februar 2017 1 / 12 Grundgerüst... braucht man immer! #include // Register- und Konstantendefinitionen
LED Skalenbeleuchtung mit einem Arduino
 Projektteil: LED Skalenbeleuchtung mit einem Arduino Aufgaben: - Ein Taster schaltet die LED-Beleuchtung ein - Nach Ablauf einer im Programm hinterlegten Zeit schaltet sich die Beleuchtung von selbst wieder
Projektteil: LED Skalenbeleuchtung mit einem Arduino Aufgaben: - Ein Taster schaltet die LED-Beleuchtung ein - Nach Ablauf einer im Programm hinterlegten Zeit schaltet sich die Beleuchtung von selbst wieder
Bus Manuals SPI I2C. Busse und Sensoren. Twix. Chaos Computer Club Cologne Twix
 Twix e.v. http://koeln.ccc.de 2017-10-30 Outline 1 Bus Basics Parallele Busse Serielle Busse 2 SPI SPI mit dem STM32 HAL 3 I2C Praxis I2C Anwenden 1 Bus Basics Parallele Busse Serielle Busse 2 SPI SPI
Twix e.v. http://koeln.ccc.de 2017-10-30 Outline 1 Bus Basics Parallele Busse Serielle Busse 2 SPI SPI mit dem STM32 HAL 3 I2C Praxis I2C Anwenden 1 Bus Basics Parallele Busse Serielle Busse 2 SPI SPI
Einführung in AVR-Assembler
 Einführung in AVR-Assembler Easterhack 2008 Chaos Computer Club Cologne Stefan Schürmans, BlinkenArea stefan@blinkenarea.org Version 1.0.4 Easterhack 2008 Einführung in AVR-Assembler 1 Inhalt Vorstellung
Einführung in AVR-Assembler Easterhack 2008 Chaos Computer Club Cologne Stefan Schürmans, BlinkenArea stefan@blinkenarea.org Version 1.0.4 Easterhack 2008 Einführung in AVR-Assembler 1 Inhalt Vorstellung
Mikrocontroller. Vortrag von Louis Liedtke. 8. Dezember Fakultät Elektrotechnik und Informatik. Bild 1: Atmel ATmega8
 Mikrocontroller Bild 1: Atmel ATmega8 Vortrag von 8. Dezember 2015 Gliederung 1. Begriffserklärung 2. Besondere Merkmale 3. Aufbau und Arbeitsweise 4. Programmierung 5. Nutzen 6. Fazit 2 1. Begriffserklärung
Mikrocontroller Bild 1: Atmel ATmega8 Vortrag von 8. Dezember 2015 Gliederung 1. Begriffserklärung 2. Besondere Merkmale 3. Aufbau und Arbeitsweise 4. Programmierung 5. Nutzen 6. Fazit 2 1. Begriffserklärung
Zahlendarstellung Logikfunktionen Register Eingänge Infrarot senden TSOP-Effekte Weiterführendes U23 2008. Abend 3:
 #2 Abend 3: Alexander Neumann e.v. http://koeln.ccc.de Köln, 3.11.2008 Gliederung 1 Zahlendarstellung n-adische Darstellung natürlicher Zahlen negative Zahlen 2 Logikfunktionen 3 Register
#2 Abend 3: Alexander Neumann e.v. http://koeln.ccc.de Köln, 3.11.2008 Gliederung 1 Zahlendarstellung n-adische Darstellung natürlicher Zahlen negative Zahlen 2 Logikfunktionen 3 Register
Unter einem Interrupt kann man sich einen durch Hardware ausgelösten Unterprogrammaufruf vorstellen.
 Interrupttechnik mit dem ATmega32 Unter einem Interrupt kann man sich einen durch Hardware ausgelösten Unterprogrammaufruf vorstellen. Aufgrund einer Interruptanforderung wird das laufende Programm unterbrochen
Interrupttechnik mit dem ATmega32 Unter einem Interrupt kann man sich einen durch Hardware ausgelösten Unterprogrammaufruf vorstellen. Aufgrund einer Interruptanforderung wird das laufende Programm unterbrochen
Übungen zu Systemnahe Programmierung in C (SPiC)
") Übungen zu Systemnahe Programmierung in C (SPiC) Moritz Strübe, Rainer Müller (Lehrstuhl Informatik 4) Sommersemester 2014 Inhalt Aufgabe4 Led Modul Wiederholung Konfiguration der Pins Hinweise zur Aufgabe
Übungen zu Systemnahe Programmierung in C (SPiC) Moritz Strübe, Rainer Müller (Lehrstuhl Informatik 4) Sommersemester 2014 Inhalt Aufgabe4 Led Modul Wiederholung Konfiguration der Pins Hinweise zur Aufgabe
Application Note. PiXtend mit Hilfe der Control- & Status-Bytes konfigurieren und überwachen. Stand , V1.06
 Application Note PiXtend mit Hilfe der Control- & Status-Bytes konfigurieren und überwachen Stand 21.02.2017, V1.06 Qube Solutions UG (haftungsbeschränkt) Arbachtalstr. 6, 72800 Eningen, Deutschland http://www.qube-solutions.de/
Application Note PiXtend mit Hilfe der Control- & Status-Bytes konfigurieren und überwachen Stand 21.02.2017, V1.06 Qube Solutions UG (haftungsbeschränkt) Arbachtalstr. 6, 72800 Eningen, Deutschland http://www.qube-solutions.de/
Makros sind Textersetzungen, welche vom Präprozessor aufgelöst werden. Dies Passiert bevor der Compiler die Datein verarbeitet.
 U4 4. Übung U4 4. Übung Besprechung Aufgabe 2 Makros Register I/O-Ports U4.1 U4-1 Makros U4-1 Makros Makros sind Textersetzungen, welche vom Präprozessor aufgelöst werden. Dies Passiert bevor der Compiler
U4 4. Übung U4 4. Übung Besprechung Aufgabe 2 Makros Register I/O-Ports U4.1 U4-1 Makros U4-1 Makros Makros sind Textersetzungen, welche vom Präprozessor aufgelöst werden. Dies Passiert bevor der Compiler
Mikrocontroller - Schnelleinstieg
 Mikrocontroller - Schnelleinstieg Am Beispiel des Atmel Mega8 Philipp Fabian Benedikt Maier Mikrocontroller Schnelleinstieg Seite 1 Mikrocontroller - Schnelleinstieg: - Was ist ein Mikrokontroller? - Welche
Mikrocontroller - Schnelleinstieg Am Beispiel des Atmel Mega8 Philipp Fabian Benedikt Maier Mikrocontroller Schnelleinstieg Seite 1 Mikrocontroller - Schnelleinstieg: - Was ist ein Mikrokontroller? - Welche
Einführung in die Programmierung von Mikrocontrollern mit C/C++
 Einführung in die Programmierung von Mikrocontrollern mit C/C++ Vorlesung Prof. Dr.-Ing. habil. G.-P. Ostermeyer Rechenleistung/Speicher Systemintegration Grundlagen der Mikrocontrollertechnik (Wiederholung)
Einführung in die Programmierung von Mikrocontrollern mit C/C++ Vorlesung Prof. Dr.-Ing. habil. G.-P. Ostermeyer Rechenleistung/Speicher Systemintegration Grundlagen der Mikrocontrollertechnik (Wiederholung)
IR NEC Empfänger mit 4x7 LED Anzeige (ATtiny2313)
") // Include C Libriaries #include #define F_CPU 4000000UL #include #include #include #include // Definition der Segmente #define SEG_O
// Include C Libriaries #include #define F_CPU 4000000UL #include #include #include #include // Definition der Segmente #define SEG_O
U5-2 Register beim AVR-µC
 U5 4. Übungsaufgabe U5 4. Übungsaufgabe U5-2 Register beim AVR-µC U5-2 Register beim AVR-mC Grundlegendes zur Übung mit dem AVR-µC 1 Überblick Register Beim AVR µc sind die Register: I/O Ports Interrupts
U5 4. Übungsaufgabe U5 4. Übungsaufgabe U5-2 Register beim AVR-µC U5-2 Register beim AVR-mC Grundlegendes zur Übung mit dem AVR-µC 1 Überblick Register Beim AVR µc sind die Register: I/O Ports Interrupts
Wer möchte, kann sein Programm auch auf echter Hardware testen
 U4 3. Übungsaufgabe U4 3. Übungsaufgabe Grundlegendes zur Übung mit dem AVR-μC Register I/O-Ports AVR-Umgebung Peripherie U4.1 U4-1 Grundlegendes zur Übung mit dem AVR-mC U4-1 Grundlegendes zur Übung mit
U4 3. Übungsaufgabe U4 3. Übungsaufgabe Grundlegendes zur Übung mit dem AVR-μC Register I/O-Ports AVR-Umgebung Peripherie U4.1 U4-1 Grundlegendes zur Übung mit dem AVR-mC U4-1 Grundlegendes zur Übung mit
7.0 PWM - Pulsbreitenmodulation
 7.0 PWM - Pulsbreitenmodulation PWM ist eine Abkürzung für Pulse Width Modulation (Pulsbreitenmodulation). Zwei unabhängige PWM-Ausgänge erlauben die Erzeugung von Rechtecksignalen mit einstellbarer Frequenz
7.0 PWM - Pulsbreitenmodulation PWM ist eine Abkürzung für Pulse Width Modulation (Pulsbreitenmodulation). Zwei unabhängige PWM-Ausgänge erlauben die Erzeugung von Rechtecksignalen mit einstellbarer Frequenz
Tag 3 Timer, ADC und PWM
 Tag 3 Timer, ADC und PWM 09/01/10 Fachbereich Physik Institut für Kernphysik Bastian Löher, Martin Konrad 1 Analog-Digital-Wandler Arbeitet durch schrittweise Näherung Aktivieren des ADCs durch ADC Enable
Tag 3 Timer, ADC und PWM 09/01/10 Fachbereich Physik Institut für Kernphysik Bastian Löher, Martin Konrad 1 Analog-Digital-Wandler Arbeitet durch schrittweise Näherung Aktivieren des ADCs durch ADC Enable
Proseminar Timer/Counter und PWM beim ATMega16 Mikrocontroller. Marcel Jakobs
 Proseminar Timer/Counter und PWM beim ATMega16 Mikrocontroller Marcel Jakobs September 2006 Inhaltsverzeichnis 1 Was ist ein Timer/Counter 2 1.1 Pulsweitenmodulation PWM.................................
Proseminar Timer/Counter und PWM beim ATMega16 Mikrocontroller Marcel Jakobs September 2006 Inhaltsverzeichnis 1 Was ist ein Timer/Counter 2 1.1 Pulsweitenmodulation PWM.................................
V cc. 1 k. 7 mal 150 Ohm
 Ein Digitalvoltmeter Seite 1 von 6 Eine Multiplex-Anzeige Mit diesem Projekt wird das Ziel verfolgt, eine mehrstellige numerische Anzeige für Mikrocontroller-Systeme zu realisieren. Die Multiplex-Anzeige
Ein Digitalvoltmeter Seite 1 von 6 Eine Multiplex-Anzeige Mit diesem Projekt wird das Ziel verfolgt, eine mehrstellige numerische Anzeige für Mikrocontroller-Systeme zu realisieren. Die Multiplex-Anzeige
Ansteuerung eines LCD-Screens
 Ansteuerung eines LCD-Screens Marcel Meinersen 4. Mai 2013 Marcel Meinersen Ansteuerung eines LCD-Screens 4. Mai 2013 1 / 27 Inhaltsverzeichnis 1 Allgemeines Was ist ein LCD-Screen? LCD 162C LED Marcel
Ansteuerung eines LCD-Screens Marcel Meinersen 4. Mai 2013 Marcel Meinersen Ansteuerung eines LCD-Screens 4. Mai 2013 1 / 27 Inhaltsverzeichnis 1 Allgemeines Was ist ein LCD-Screen? LCD 162C LED Marcel
Einleitung Die Pins alphabetisch Kapitel 1 Programmierung des ATmega8 und des ATmega
 Einleitung... 11 Die Pins alphabetisch.... 12 Kapitel 1 Programmierung des ATmega8 und des ATmega328.... 15 1.1 Was Sie auf den nächsten Seiten erwartet... 19 1.2 Was ist eine Micro Controller Unit (MCU)?....
Einleitung... 11 Die Pins alphabetisch.... 12 Kapitel 1 Programmierung des ATmega8 und des ATmega328.... 15 1.1 Was Sie auf den nächsten Seiten erwartet... 19 1.2 Was ist eine Micro Controller Unit (MCU)?....
GdI2 - Systemnahe Programmierung in C Übungen Jürgen Kleinöder Universität Erlangen-Nürnberg Informatik 4, 2006 U4.fm
 U4 4. Übungsaufgabe U4 4. Übungsaufgabe Grundlegendes zur Übung mit dem AVR-µC Register I/O Ports Interrupts AVR-Umgebung U4.1 U4-1 Grundlegendes zur Übung mit dem AVR-mC U4-1 Grundlegendes zur Übung mit
U4 4. Übungsaufgabe U4 4. Übungsaufgabe Grundlegendes zur Übung mit dem AVR-µC Register I/O Ports Interrupts AVR-Umgebung U4.1 U4-1 Grundlegendes zur Übung mit dem AVR-mC U4-1 Grundlegendes zur Übung mit
Gliederung Hardware fuer die Zeitmessung Zeitmanagement auf Uniprozessorsystemen. Timing Measurements. Timo Schneider. 4.
 4. Juni 2005 1 2 Timer Interrupts Software Timer System Calls Die Real Time Clock befindet sich zusammen mit CMOS-RAM (Bios) auf einem Chip, zb Motorola 1416818. Wenn der PC ausgeschaltet wird, wird die
4. Juni 2005 1 2 Timer Interrupts Software Timer System Calls Die Real Time Clock befindet sich zusammen mit CMOS-RAM (Bios) auf einem Chip, zb Motorola 1416818. Wenn der PC ausgeschaltet wird, wird die
Steuern und Messen mit Raspberry Pi
 24 C 36 % 24 C Thanks to Openclipart, Fritzing, elinux.org, Liz Grazer Linuxtage 2014 (GLT14) Raspberry Pi Raspberry Pi ist ein kreditkartengroßer EinplatinenComputer, der von der Raspberry Pi Foundation
24 C 36 % 24 C Thanks to Openclipart, Fritzing, elinux.org, Liz Grazer Linuxtage 2014 (GLT14) Raspberry Pi Raspberry Pi ist ein kreditkartengroßer EinplatinenComputer, der von der Raspberry Pi Foundation
Mikrocontrollertechnik C2 Timer. Einführung
 C2 Timer Einführung Die drei Timer des ATmega32 bieten sehr viele unterschiedliche Betriebsarten. Im folgenden Kapitel sollen nur einige der Betriebsarten kennen gelernt werden. Was ist ein Timer? Ein
C2 Timer Einführung Die drei Timer des ATmega32 bieten sehr viele unterschiedliche Betriebsarten. Im folgenden Kapitel sollen nur einige der Betriebsarten kennen gelernt werden. Was ist ein Timer? Ein
Einführung in die Welt der Microcontroller
 Übersicht Microcontroller Schaltungen Sonstiges Einführung in die Welt der Microcontroller Übersicht Microcontroller Schaltungen Sonstiges Inhaltsverzeichnis 1 Übersicht Möglichkeiten Einsatz 2 Microcontroller
Übersicht Microcontroller Schaltungen Sonstiges Einführung in die Welt der Microcontroller Übersicht Microcontroller Schaltungen Sonstiges Inhaltsverzeichnis 1 Übersicht Möglichkeiten Einsatz 2 Microcontroller
Vorbereitung. Teil D Analog-Digital-Wandler 1
 Vorbereitung So wird der Analog-Digital-Wandler des Mikrocontrollers ATmega328P initialisiert: ADMUX = _BV(REFS0); ADCSRA = _BV(ADEN) _BV(ADPS2) _BV(ADPS1) _BV(ADPS0); Der Analog-Digital-Wandler ist im
Vorbereitung So wird der Analog-Digital-Wandler des Mikrocontrollers ATmega328P initialisiert: ADMUX = _BV(REFS0); ADCSRA = _BV(ADEN) _BV(ADPS2) _BV(ADPS1) _BV(ADPS0); Der Analog-Digital-Wandler ist im
Rot/Gelb. Grün. Rot. Gelb. G.1 Einleitung
 G.1 Einleitung Eine Verkehrsampel durchläuft verschiedene Zustände. Bestimmte Ereignisse zum Beispiel ein Tastendruck oder der Ablauf einer Wartezeit führen zum Wechsel des aktuellen Zustands. Ein vereinfachtes
G.1 Einleitung Eine Verkehrsampel durchläuft verschiedene Zustände. Bestimmte Ereignisse zum Beispiel ein Tastendruck oder der Ablauf einer Wartezeit führen zum Wechsel des aktuellen Zustands. Ein vereinfachtes
Praktikum Komponenten & Programmierung von Automatisierungssystemen
 Praktikum Komponenten & Programmierung von Automatisierungssystemen Prof. Dr.-Ing. Tilman Küpper Hochschule München Fakultät 03 Einleitung 1 Inhalte der Vorlesung Teil 1 Grundlagen, Rechnerarchitektur
Praktikum Komponenten & Programmierung von Automatisierungssystemen Prof. Dr.-Ing. Tilman Küpper Hochschule München Fakultät 03 Einleitung 1 Inhalte der Vorlesung Teil 1 Grundlagen, Rechnerarchitektur
Bisher hatten immer nur als Ausgänge geschaltet und hierfür folgende Befehle benutzt:
 Tasten abfragen Bisher hatten immer nur als Ausgänge geschaltet und hierfür folgende Befehle benutzt: pinmode(pinnummer, OUTPUT) digitalwrite(pinnummer, HIGH) oder digitalwrite(pinnummer, LOW) Zum Abfragen
Tasten abfragen Bisher hatten immer nur als Ausgänge geschaltet und hierfür folgende Befehle benutzt: pinmode(pinnummer, OUTPUT) digitalwrite(pinnummer, HIGH) oder digitalwrite(pinnummer, LOW) Zum Abfragen
Klasse, Name : Datum : Rad l/r Linienfolger l/r Laderaum ATMEGA 128
 HTL_RoboterDKU.odt Übung : Arbeiten mit dem HTL Leonding Roboter Seite : 1 von 7 1. Roboter Peripherie Eingänge Ausgänge DIGITAL ANA- LG DATEN Taster Kante l/r Rad l/r Linienfolger l/r Laderaum Klappe
HTL_RoboterDKU.odt Übung : Arbeiten mit dem HTL Leonding Roboter Seite : 1 von 7 1. Roboter Peripherie Eingänge Ausgänge DIGITAL ANA- LG DATEN Taster Kante l/r Rad l/r Linienfolger l/r Laderaum Klappe
0-10V Steuerung für Frequenzumrichter
 0-10V Steuerung für Frequenzumrichter Soft- und Hardware Langenfeld, Stiftstr. 3, 86866 Mickhausen Tel.: 082041281, Fax: 082041675 E-Mail: Langenfeld@pro-tos.de Homepage: http://www.pro-tos.de !! Sicherheitshinweise
0-10V Steuerung für Frequenzumrichter Soft- und Hardware Langenfeld, Stiftstr. 3, 86866 Mickhausen Tel.: 082041281, Fax: 082041675 E-Mail: Langenfeld@pro-tos.de Homepage: http://www.pro-tos.de !! Sicherheitshinweise
Vortrag zur Seminarphase der PG Solar Doorplate MSP430 Wichtigste Grundlagen von David Tondorf
 Vortrag zur Seminarphase der PG Solar Doorplate MSP430 Wichtigste Grundlagen von David Tondorf Technische Daten 16-Bit RISC Architektur bis zu 16 Mhz Vcc: 1,8-3,6V 64 KB FRAM 2 KB SRAM 7 Schlafmodi 5 16-Bit
Vortrag zur Seminarphase der PG Solar Doorplate MSP430 Wichtigste Grundlagen von David Tondorf Technische Daten 16-Bit RISC Architektur bis zu 16 Mhz Vcc: 1,8-3,6V 64 KB FRAM 2 KB SRAM 7 Schlafmodi 5 16-Bit
Anleitung zu IMP Gateway Installation
 Diese Anleitung beschreibt, wie zwei oder mehr IMP5000 im Gateway-Modus an den PC angeschlossen werden. Diese Anschlußtechnik ermöglicht eine kostengünstige und einfache PC-Verbindung in Kombination mit
Diese Anleitung beschreibt, wie zwei oder mehr IMP5000 im Gateway-Modus an den PC angeschlossen werden. Diese Anschlußtechnik ermöglicht eine kostengünstige und einfache PC-Verbindung in Kombination mit
Hardware Beschreibung
 E2000-PLUS Hardware Beschreibung Wir übernehmen keine Haftung für Schäden, die durch einen Nachbau einer dieser Schaltung entstehen. Dieses Dokument ist noch in der Entstehung und kann Lücken aufweisen!
E2000-PLUS Hardware Beschreibung Wir übernehmen keine Haftung für Schäden, die durch einen Nachbau einer dieser Schaltung entstehen. Dieses Dokument ist noch in der Entstehung und kann Lücken aufweisen!
Richtung durch Taster während des Ablaufs umschaltbar
 U16 Aufgabe 5 U16 Aufgabe 5 Besprechung Aufgabe 3 Notation AVR-Timer Umgang mit mehreren Interruptquellen Arbeiten mit einer diskreten Zeitbasis U16.1 Alle LEDs einschalten, dann in gleicher Reihenfolge
U16 Aufgabe 5 U16 Aufgabe 5 Besprechung Aufgabe 3 Notation AVR-Timer Umgang mit mehreren Interruptquellen Arbeiten mit einer diskreten Zeitbasis U16.1 Alle LEDs einschalten, dann in gleicher Reihenfolge
0-10V Steuerung für Frequenzumrichter
 0-10V Steuerung für Frequenzumrichter Soft- und Hardware Langenfeld, Schmutterstr. 6, 86866 Mickhausen Tel.: 082041281 E-Mail: Langenfeld@pro-tos.de Homepage: http://www.pro-tos.de 1 Inhaltsverzeichnis
0-10V Steuerung für Frequenzumrichter Soft- und Hardware Langenfeld, Schmutterstr. 6, 86866 Mickhausen Tel.: 082041281 E-Mail: Langenfeld@pro-tos.de Homepage: http://www.pro-tos.de 1 Inhaltsverzeichnis
Raspberry Pi Rezepte Teil 5
 Raspberry Pi Rezepte Teil 5 I²C: Zwischen zwei ICs Von Tony Dixon (UK) In den letzten beiden Folgen von Elektor.POST ging es um die seriellen Schnittstellen UART und SPI auf dem Expansion Header von RPi.
Raspberry Pi Rezepte Teil 5 I²C: Zwischen zwei ICs Von Tony Dixon (UK) In den letzten beiden Folgen von Elektor.POST ging es um die seriellen Schnittstellen UART und SPI auf dem Expansion Header von RPi.
Bluetooth Handy Security Modul BTHSM-SV-002
 Bluetooth Handy Security Modul BTHSM-SV-002 Allgemeine Beschreibung: General description: Das Bluetooth-Schaltmodul ist für den Anschluss an Tür-, Toröffner- und viele andere Sicherheitsanlagen geeignet:
Bluetooth Handy Security Modul BTHSM-SV-002 Allgemeine Beschreibung: General description: Das Bluetooth-Schaltmodul ist für den Anschluss an Tür-, Toröffner- und viele andere Sicherheitsanlagen geeignet:
Kurzanleitung. Hotel Modus. Version 1.0.1 / MB82 / MB82S<, Stand 29.04.2013. Vestel Germany GmbH Parkring 6 85748 Garching bei München
 Kurzanleitung Hotel Modus Version 1.0.1 / MB82 / MB82S
Kurzanleitung Hotel Modus Version 1.0.1 / MB82 / MB82S
F4 Fuse- und Lock-Bits
 Im AVR gibt es eine Reihe von programmierbaren Schaltern, die wichtige Eigenschaften des Controller festlegen. Diese Schalter können nur mit dem Programmiergerät verändert werden (Ausnahme: Bootloader
Im AVR gibt es eine Reihe von programmierbaren Schaltern, die wichtige Eigenschaften des Controller festlegen. Diese Schalter können nur mit dem Programmiergerät verändert werden (Ausnahme: Bootloader
Parallel-IO. Ports am ATmega128
 Parallel-IO Ansteuerung Miniprojekt Lauflicht Ports am ATmega128 PortE (PE7...PE0) alternativ, z.b. USART0 (RS232) 1 Pin von PortC Port C (PC7...PC0) 1 Parallel-IO-Port "Sammelsurium" verschiedener Speicher
Parallel-IO Ansteuerung Miniprojekt Lauflicht Ports am ATmega128 PortE (PE7...PE0) alternativ, z.b. USART0 (RS232) 1 Pin von PortC Port C (PC7...PC0) 1 Parallel-IO-Port "Sammelsurium" verschiedener Speicher
Versuch 2, LPC11U24 - GPIO
 Die LED auf dem Piggyback (weiße Zusatzplatine) soll mit Hilfe der BOOT-Taste gesteuert werden. Solange die Taste gedrückt ist, soll die LED leuchten. Ist die Taste nicht gedrückt, dann bleibt die LED
Die LED auf dem Piggyback (weiße Zusatzplatine) soll mit Hilfe der BOOT-Taste gesteuert werden. Solange die Taste gedrückt ist, soll die LED leuchten. Ist die Taste nicht gedrückt, dann bleibt die LED
8.1 Grundsätzlicher Aufbau der Beispiele
 107 8 Beispiele Nachdem nun viele theoretische Grundlagen gelegt wurden, kann man mit dem Programmieren eines Mikrocontrollers beginnen. In den folgenden Kapiteln werden verschiedene Möglichkeiten der
107 8 Beispiele Nachdem nun viele theoretische Grundlagen gelegt wurden, kann man mit dem Programmieren eines Mikrocontrollers beginnen. In den folgenden Kapiteln werden verschiedene Möglichkeiten der
Umbau eines Saug- und Wisch Roboters auf ARDUINO Steuerung
 Saug-Wisch-Roboter Umbau eines Saug- und Wisch Roboters auf ARDUINO Steuerung TOPAN AVC 701 (702) Seite 1 Saug-Wisch-Roboter Elektronik M Saug Motor Radmotor Links FB 433 M Elektronik Arduino Nano DC-
Saug-Wisch-Roboter Umbau eines Saug- und Wisch Roboters auf ARDUINO Steuerung TOPAN AVC 701 (702) Seite 1 Saug-Wisch-Roboter Elektronik M Saug Motor Radmotor Links FB 433 M Elektronik Arduino Nano DC-
EXF2 TF2 IEX6 IEX5 IEX4 IEX3 IEX2 IADC 0C0H T2PS I3FR I2FR T2R1 T2R0 T2CM T2I1 T2I0 0C8H. AFH AEH ADH ACH ABH AAH A9H A8H Bitdresse
 Siemens-C515C Special-Function-Register (Subset) MSB 7 6 5 4 3 2 1 LSB 0 COCH3 COCL3 COCH2 COCL2 COCH1 COCL1 COCH0 COCL0 Bit 0C1H CCEN EXF2 TF2 IEX6 IEX5 IEX4 IEX3 IEX2 IADC 0C0H IRCON C7H C6H C5H C4H
Siemens-C515C Special-Function-Register (Subset) MSB 7 6 5 4 3 2 1 LSB 0 COCH3 COCL3 COCH2 COCL2 COCH1 COCL1 COCH0 COCL0 Bit 0C1H CCEN EXF2 TF2 IEX6 IEX5 IEX4 IEX3 IEX2 IADC 0C0H IRCON C7H C6H C5H C4H
Die Technik hinter IoT: Arduino, Raspberry Pi & Co.
 Die Technik hinter IoT: Arduino, Raspberry Pi & Co. Praxisbeispiele für den Hausgebrauch Uwe Steinmann MMK GmbH 25.-26. September 2017 Uwe Steinmann (MMK GmbH) Die Technik hinter IoT 25.-26. September
Die Technik hinter IoT: Arduino, Raspberry Pi & Co. Praxisbeispiele für den Hausgebrauch Uwe Steinmann MMK GmbH 25.-26. September 2017 Uwe Steinmann (MMK GmbH) Die Technik hinter IoT 25.-26. September
MSP 430. Einführung. Was kann er? Hauptthemen. Wie sieht er aus? 64 / 100 polig. Was kann er? MSP 430 1
 MSP 430 Mixed Signal Microcontroller MSP 430 Einführung Der Mikrocontrollers MSP430 von Texas Instruments Das Entwicklungsboard MSP-STK 430A320 http://www.ti.com Texas Instruments 1 Texas Instruments 2
MSP 430 Mixed Signal Microcontroller MSP 430 Einführung Der Mikrocontrollers MSP430 von Texas Instruments Das Entwicklungsboard MSP-STK 430A320 http://www.ti.com Texas Instruments 1 Texas Instruments 2
Ausführungszeiten. Worst-Case Execution-Time. Übung zur Vorlesung EZS. Zeitgeber Oszilloskop Diskussion
 1 Überblick Ausführungszeiten Übung zur Vorlesung EZS Florian Franzmann Martin Hoffmann Tobias Klaus Peter Wägemann Friedrich-Alexander-Universität Erlangen-Nürnberg Lehrstuhl Informatik 4 (Verteilte Systeme
1 Überblick Ausführungszeiten Übung zur Vorlesung EZS Florian Franzmann Martin Hoffmann Tobias Klaus Peter Wägemann Friedrich-Alexander-Universität Erlangen-Nürnberg Lehrstuhl Informatik 4 (Verteilte Systeme
Prinzipien und Komponenten eingebetteter Systeme
 1 Prinzipen und Komponenten Eingebetteter Systeme (PKES) (2) Mikrocontroller I Sebastian Zug Arbeitsgruppe: Embedded Smart Systems 2 Veranstaltungslandkarte Fehlertoleranz, Softwareentwicklung Mikrocontroller
1 Prinzipen und Komponenten Eingebetteter Systeme (PKES) (2) Mikrocontroller I Sebastian Zug Arbeitsgruppe: Embedded Smart Systems 2 Veranstaltungslandkarte Fehlertoleranz, Softwareentwicklung Mikrocontroller
Netduino Mikroprozessor für.net Entwickler
 Netduino Mikroprozessor für.net Entwickler Patrick Herting Softwareentwickler BlueTem Software GmbH Blog E-Mail www.wdev.de pher@live.de Ablaufplan - Theorieteil Was ist der Netduino? Welche Modelle gibt
Netduino Mikroprozessor für.net Entwickler Patrick Herting Softwareentwickler BlueTem Software GmbH Blog E-Mail www.wdev.de pher@live.de Ablaufplan - Theorieteil Was ist der Netduino? Welche Modelle gibt
LED PUSH Dimmer DW (Dynamic White) Bedienungsanleitung
 Bedienungsanleitung") LED PUSH Dimmer DW (Dynamic White) Bedienungsanleitung Artikel Nr.: LC-011-002 1. Produktbeschreibung Mit diesem Dimmmodul ist es möglich dynamisch weisse LED Module anzusteuern. Der Push Dimmer DW funktioniert
LED PUSH Dimmer DW (Dynamic White) Bedienungsanleitung Artikel Nr.: LC-011-002 1. Produktbeschreibung Mit diesem Dimmmodul ist es möglich dynamisch weisse LED Module anzusteuern. Der Push Dimmer DW funktioniert
saarland Prof. Dr. Andreas Zeller Verantw. Tutor: Florian Groß Übungsblatt 4
 Programmieren für Ingenieure Abgabe Dieses Übungsblatt ist bis Freitag, 23.05. um 12:00 Uhr per Email an den eigenen Tutoren abzugeben. Benennen Sie die Abgabe bitte eindeutig: Matrikelnummer _Abgabe_Blattnummer.Format.
Programmieren für Ingenieure Abgabe Dieses Übungsblatt ist bis Freitag, 23.05. um 12:00 Uhr per Email an den eigenen Tutoren abzugeben. Benennen Sie die Abgabe bitte eindeutig: Matrikelnummer _Abgabe_Blattnummer.Format.
Prinzipen und Komponenten Eingebetteter Systeme (PKES) Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme
 Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme") 1 Vorlesung Prinzipen und Komponenten Eingebetteter Systeme (PKES) (3) Mikrocontroller II Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme 2 Mitarbeiter im ottocar Projekt gesucht Ziel:
1 Vorlesung Prinzipen und Komponenten Eingebetteter Systeme (PKES) (3) Mikrocontroller II Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme 2 Mitarbeiter im ottocar Projekt gesucht Ziel:
Kleine Starthilfe für die Inbetriebnahme des GPIO-Expansion-Boards mit PowerPC 565 und RTOS/UH
 Kleine Starthilfe für die Inbetriebnahme des GPIO-Expansion-Boards mit PowerPC 565 und RTOS/UH mit Beispielprogrammen Prof.Dr.-Ing. Rolf Hausdörfer, Labor Echtzeitsysteme, Fachhochschule Lippe und Höxter,
Kleine Starthilfe für die Inbetriebnahme des GPIO-Expansion-Boards mit PowerPC 565 und RTOS/UH mit Beispielprogrammen Prof.Dr.-Ing. Rolf Hausdörfer, Labor Echtzeitsysteme, Fachhochschule Lippe und Höxter,
Informatik Enlightened. Station 0 - Einstieg
 Informatik Enlightened Herzlich Willkommen zum Workshop rund um das Thema Licht! Ihr wollt heute also eine Einparkhilfe selbst konstruieren, Geschwindigkeiten messen, eine Blume mit der Sonne wandern lassen
Informatik Enlightened Herzlich Willkommen zum Workshop rund um das Thema Licht! Ihr wollt heute also eine Einparkhilfe selbst konstruieren, Geschwindigkeiten messen, eine Blume mit der Sonne wandern lassen
Einführung in die Arduino-Programmierung II
 Einführung in die Arduino-Programmierung II Hochschule Niederrhein University of Applied Sciences Elektrotechnik und Informatik Faculty of Electrical Engineering and Computer Science 5. Dimmen einer LED
Einführung in die Arduino-Programmierung II Hochschule Niederrhein University of Applied Sciences Elektrotechnik und Informatik Faculty of Electrical Engineering and Computer Science 5. Dimmen einer LED
Befehlstabelle awapswitch
 Befehlstabelle awapswitch Inhalt 1 Wichtige serielle Einstellungen 2 2 Befehlstabelle 2 3 Nummerierung Tasten und Leds 3 4 Integrationsbeispiele: 3 4.1 Tasten 3 4.2 Leds 3 4.3 Temperatur 3 4.4 Buzzer (Tonausgabe)
Befehlstabelle awapswitch Inhalt 1 Wichtige serielle Einstellungen 2 2 Befehlstabelle 2 3 Nummerierung Tasten und Leds 3 4 Integrationsbeispiele: 3 4.1 Tasten 3 4.2 Leds 3 4.3 Temperatur 3 4.4 Buzzer (Tonausgabe)
F.A.Q. Zum erneuten Einschalten muss der Stecker dann kurz raus und rein gesteckt bzw. einfach der Schalter gedrückt werden (Diamant-Edition)
") F.A.Q Raspberry Pi 3 Wie schalte ich das System ein? Indem man das HDMI-Kabel an den Fernseher und das Netzteil am Raspberry Pi (Energieversorgung) anschließt. Sobald das Netzteil verbunden ist fährt der
F.A.Q Raspberry Pi 3 Wie schalte ich das System ein? Indem man das HDMI-Kabel an den Fernseher und das Netzteil am Raspberry Pi (Energieversorgung) anschließt. Sobald das Netzteil verbunden ist fährt der
Übungen zu Systemnahe Programmierung in C (SPiC)
") Übungen zu Systemnahe Programmierung in C (SPiC) Sebastian Maier (Lehrstuhl Informatik 4) Übung 4 Sommersemester 2016 Inhalt Module Schnittstellenbeschreibung Ablauf vom Quellcode zum laufenden Programm
Übungen zu Systemnahe Programmierung in C (SPiC) Sebastian Maier (Lehrstuhl Informatik 4) Übung 4 Sommersemester 2016 Inhalt Module Schnittstellenbeschreibung Ablauf vom Quellcode zum laufenden Programm
Temperaturmodul. Software. Bedeutung der Leuchtdioden. Kanal-LEDs. System-LEDs. Start nach Reset
 Temperaturmodul Software Bedeutung der Leuchtdioden Alle LED sind sog. Bicolor-LEDs, die, wie der Name nicht sagt, drei Farben anzeigen können. Rot, grün und gelb, wenn rot und grün gemeinsam aktiviert
Temperaturmodul Software Bedeutung der Leuchtdioden Alle LED sind sog. Bicolor-LEDs, die, wie der Name nicht sagt, drei Farben anzeigen können. Rot, grün und gelb, wenn rot und grün gemeinsam aktiviert
ATmega169 Chip: Pin-Layout
 ATmega169 Chip: Pin-Layout Die logische Schnittstelle der Funktionseinheit MCU (Microcontroller Unit) entspricht der physikalischen Schnittstelle der Baueinheit (Chip). Für die Maschinenbefehle sind nur
ATmega169 Chip: Pin-Layout Die logische Schnittstelle der Funktionseinheit MCU (Microcontroller Unit) entspricht der physikalischen Schnittstelle der Baueinheit (Chip). Für die Maschinenbefehle sind nur
Inbetriebnahme des Willem Programmers PCB5-E. Die Software GQUSBprg 0.98d6 Willem Enhanced / Dual Power Programmer PCB5.
 Inbetriebnahme des Willem Programmers PCB5-E. Die Software GQUSBprg 0.98d6 Willem Enhanced / Dual Power Programmer PCB5.0E von der Website http://www.zeitech.de/index.php?s=36& enthält die Datei 11.02.2011
Inbetriebnahme des Willem Programmers PCB5-E. Die Software GQUSBprg 0.98d6 Willem Enhanced / Dual Power Programmer PCB5.0E von der Website http://www.zeitech.de/index.php?s=36& enthält die Datei 11.02.2011
Data Monitor Anzeige der zuletzt gesendeten bzw. empfangenen Daten
 T9620 / G9620 MIDI GPIO INTERFACE Gerät zur Umsetzung von Midi - Befehlen auf GPIO 8 - GPI Eingänge Option: weitere 8 GPI und 8 GPO 8 - Potentialfreie GPO Ausgänge Status GPIO Statusanzeige der Ein-Ausgänge
T9620 / G9620 MIDI GPIO INTERFACE Gerät zur Umsetzung von Midi - Befehlen auf GPIO 8 - GPI Eingänge Option: weitere 8 GPI und 8 GPO 8 - Potentialfreie GPO Ausgänge Status GPIO Statusanzeige der Ein-Ausgänge
a) Welche Aussage zu Zeigern ist richtig? Die Übergabesemantik für Zeiger als Funktionsparameter ist callby-value.
 Welche Aussage zu Zeigern ist richtig? Die Übergabesemantik für Zeiger als Funktionsparameter ist callby-value.") Aufgabe 1: (15 Punkte) Bei den Multiple-Choice-Fragen ist jeweils nur eine richtige Antwort eindeutig anzukreuzen. Auf die richtige Antwort gibt es die angegebene Punktzahl. Wollen Sie eine Multiple-Choice-Antwort
Aufgabe 1: (15 Punkte) Bei den Multiple-Choice-Fragen ist jeweils nur eine richtige Antwort eindeutig anzukreuzen. Auf die richtige Antwort gibt es die angegebene Punktzahl. Wollen Sie eine Multiple-Choice-Antwort
Zähler- und Zeitgeber-Baugruppen
 Zähler- und Zeitgeber-Baugruppen Sinn: häufig müssen Zeitbedingungen eingehalten werden z.b.: einige ms warten, Häufigkeit von Ereignissen zählen etc... Lösung: 1.) Zeitschleifen = Programm abarbeiten,
Zähler- und Zeitgeber-Baugruppen Sinn: häufig müssen Zeitbedingungen eingehalten werden z.b.: einige ms warten, Häufigkeit von Ereignissen zählen etc... Lösung: 1.) Zeitschleifen = Programm abarbeiten,
Modellgestütztes Software Engineering. Versuch 5. Wintersemester 2015
 Modellgestütztes Software Engineering Versuch 5 Wintersemester 2015 Version 7.0.1, 16. Dezember 2015 Inhalt 1 OOP IN C... 3 1.1 UMSETZUNG IN RAPHSODY (RIC)... 3 2 DIE ENTWICKLUNGSUMGEBUNG... 5 2.1 HARDWARE
Modellgestütztes Software Engineering Versuch 5 Wintersemester 2015 Version 7.0.1, 16. Dezember 2015 Inhalt 1 OOP IN C... 3 1.1 UMSETZUNG IN RAPHSODY (RIC)... 3 2 DIE ENTWICKLUNGSUMGEBUNG... 5 2.1 HARDWARE
Was so passieren wird:
 Arduino Einführung Arduino Einführung Was so passieren wird: Was so passieren wird: Arduino Überblick Was so passieren wird: Arduino Überblick Die Taschenlampe Was so passieren wird: Arduino Überblick
Arduino Einführung Arduino Einführung Was so passieren wird: Was so passieren wird: Arduino Überblick Was so passieren wird: Arduino Überblick Die Taschenlampe Was so passieren wird: Arduino Überblick
Atmega Interrupts. Rachid Abdallah Gruppe 3 Betreuer : Benjamin Bös
 Atmega Interrupts Rachid Abdallah Gruppe 3 Betreuer : Benjamin Bös Inhaltsverzeichnis Vorbereitung Was Sind Interrupts Interruptvektoren Software Interrupts Hardware Interrupts Quellen 2 Vorbereitung Rechner
Atmega Interrupts Rachid Abdallah Gruppe 3 Betreuer : Benjamin Bös Inhaltsverzeichnis Vorbereitung Was Sind Interrupts Interruptvektoren Software Interrupts Hardware Interrupts Quellen 2 Vorbereitung Rechner
mystm32 Lehrbuch Leseprobe
 Sven Löbmann Toralf Riedel Alexander Huwaldt mystm32 Lehrbuch Ein Lehrbuch für die praxisorientierte Einführung in die Programmierung von ARM-Mikrocontrollern Leseprobe Die Informationen in diesem Produkt
Sven Löbmann Toralf Riedel Alexander Huwaldt mystm32 Lehrbuch Ein Lehrbuch für die praxisorientierte Einführung in die Programmierung von ARM-Mikrocontrollern Leseprobe Die Informationen in diesem Produkt
Snake Projekt. Jan Scholz. 16. März 2013
 Snake Projekt Jan Scholz 16. März 2013 Inhaltsverzeichnis 1 Einführung 3 2 Hardware Entwicklung 4 2.1 Mikrocontroller............................. 4 2.2 LED-Matrix............................... 4 2.2.1
Snake Projekt Jan Scholz 16. März 2013 Inhaltsverzeichnis 1 Einführung 3 2 Hardware Entwicklung 4 2.1 Mikrocontroller............................. 4 2.2 LED-Matrix............................... 4 2.2.1
Einführung in das Programmieren in der Sekundarstufe 1. mit einem Arduino und der Physical-Computing-Plattform
 Einführung in das Programmieren in der Sekundarstufe 1 mit einem Arduino und der Physical-Computing-Plattform 1 Arduino mit Breadboard (Steckbrett) und LED mit Vorwiderstand Arduino-Board Uno R3 mit Mikrocontroller
Einführung in das Programmieren in der Sekundarstufe 1 mit einem Arduino und der Physical-Computing-Plattform 1 Arduino mit Breadboard (Steckbrett) und LED mit Vorwiderstand Arduino-Board Uno R3 mit Mikrocontroller
Studiengang Maschinenbau, Schwerpunkt Mechatronik (früher: Automatisierungstechnik) Seite 1 von 8
 Seite 1 von 8") Studiengang Maschinenbau, Schwerpunkt Mechatronik (früher: Automatisierungstechnik) Seite 1 von 8 Hochschule München Fakultät 03 Zugelassene Hilfsmittel: alle eigenen, Taschenrechner Viel Erfolg!! Komponenten
Studiengang Maschinenbau, Schwerpunkt Mechatronik (früher: Automatisierungstechnik) Seite 1 von 8 Hochschule München Fakultät 03 Zugelassene Hilfsmittel: alle eigenen, Taschenrechner Viel Erfolg!! Komponenten
Wenn Sie das Register: Retrtrieve IP adress automatically (DHCP enable) aktivieren, wird die IP-Adresse automatisch eingetragen.
 aktivieren, wird die IP-Adresse automatisch eingetragen.") ----------------------------------------------------------------------------------------------------------------- Einsatz der PoKeys57E fär die MDLCNC Schrittmotorsteuerung fär 3 Motoren (4,5A Endstufen!)
----------------------------------------------------------------------------------------------------------------- Einsatz der PoKeys57E fär die MDLCNC Schrittmotorsteuerung fär 3 Motoren (4,5A Endstufen!)
1 KANAL LED CCT DIMMER PushDIM 2x8A (3421)
") 1 KANAL LED CCT DIMMER PushDIM 2x8A (3421) Beschreibung Mit diesem Dimmer ist es möglich weiße CCT LED Module anzusteuern. Der Push DIM funktioniert mit PWM (Pulsweitenmodulation) mit einer Eingangsspannung
1 KANAL LED CCT DIMMER PushDIM 2x8A (3421) Beschreibung Mit diesem Dimmer ist es möglich weiße CCT LED Module anzusteuern. Der Push DIM funktioniert mit PWM (Pulsweitenmodulation) mit einer Eingangsspannung
DMX-LED-DIMMER X9 HR 9x 16 BIT PWM je 10A
 DMX-LED-DIMMER X9 HR 9x 16 BIT PWM je 10A Bedienungsanleitung DMX-LED-Dimmer X9 HR 2 Beschreibung Der DMX-LED-Dimmer X9 HR ist speziell für die Ansteuerung von RGB LED-Stripes vorgesehen. Er verfügt über
DMX-LED-DIMMER X9 HR 9x 16 BIT PWM je 10A Bedienungsanleitung DMX-LED-Dimmer X9 HR 2 Beschreibung Der DMX-LED-Dimmer X9 HR ist speziell für die Ansteuerung von RGB LED-Stripes vorgesehen. Er verfügt über
System-on-chip Car. Übungsblatt 1. Bearbeitung bis spätestens 9. Mai 2008, Demonstration im Labor Bearbeitungszeit: 3 Wochen
 System-on-chip Car Übungsblatt 1 Bearbeitung bis spätestens 9. Mai 2008, Demonstration im Labor Bearbeitungszeit: 3 Wochen Die folgenden Quellen sind für die Bearbeitung der Aufgaben hilfreich. Gunther
System-on-chip Car Übungsblatt 1 Bearbeitung bis spätestens 9. Mai 2008, Demonstration im Labor Bearbeitungszeit: 3 Wochen Die folgenden Quellen sind für die Bearbeitung der Aufgaben hilfreich. Gunther