UAV in der Photogrammetrie: Gestern Heute Morgen
|
|
|
- Birgit Vogel
- vor 5 Jahren
- Abrufe
Transkript
1 UAV in der Photogrammetrie: Gestern Heute Morgen Prof. Dr. Ing. Heinz Jürgen Przybilla Hochschule Bochum
2 Gliederung Historie Administration Drohne vs. UAV Systemkomponenten & Workflow Zusammenfassung & Ausblick


3 Der Kleine UHU

4 Flugfähiger Modellhubschrauber (1970) Quelle: Dieter Schlüter

5 Fernlenkbildflug 1979/80
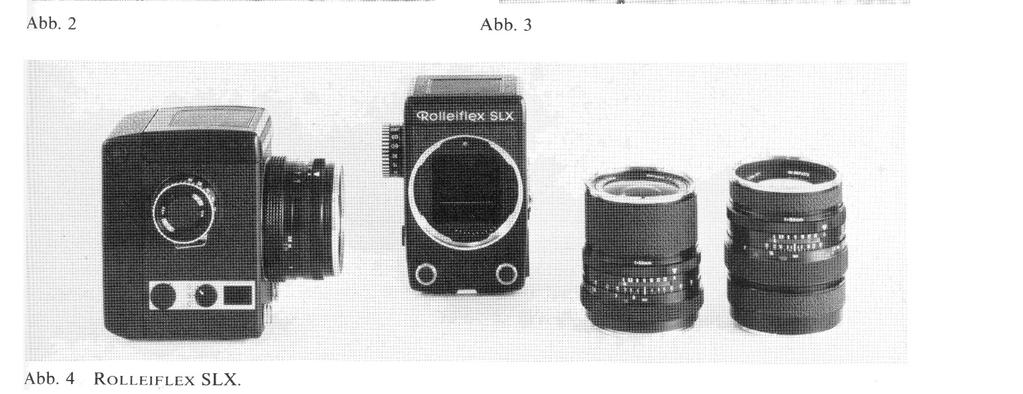

6 Fernlenkbildflug 1979/80


7 Fernlenkbildflug 1979/80



8 Fernlenkbildflug 1979/80




9 Fernlenkbildflug 1979/80
10 Am Anfang steht die Fluggenehmigung In Deutschland werden Fluggenehmigungen derzeit länderspezifisch erteilt. Örtliche Ordnungsbehörden sind in der Regel vorab über ein Flugvorhaben zu informieren.

11 Aufstiegserlaubnis / Luftfahrtbehörde Quelle:

12 Drohnenverordnung Quelle:
13 Drohnenverordnung 1. Kennzeichnungspflicht: Ab 0,25 kg muss eine Plakette mit Namen des Eigentümers angebracht werden auch auf Modellfluggeländen. 2. Kenntnisnachweis: Ab 2,0 kg müssen besondere Kenntnisse nachgewiesen werden. 3. Erlaubnispflicht: Ab 5,0 kg wird eine speielle Erlaubnis der Landesluftfahrtbehörde Ausnahme: benötigt. BEHÖRDEN!! 4. Ab 100m: In dieser höhe dürfen Drohnen nur fliegen, wenn eine behördliche Ausnahmeerlaubnis eingeholt wurde. Bei Modellflugzeugen müssen lediglich besondere Kenntnisse nachgewiesen werden. Weiter Überflugverbotbereiche siehe: Quelle:
14 Begriff der Behörde Im Gegensatz dazu bezeichnet der funktionale Behördenbegriff ( 1 Abs. 4 VwVfG) die Behörde als jede Stelle, die Aufgaben der öffentlichen Verwaltung wahrnimmt. Aufgabenerfüllung der öffentlichen Verwaltung i.s.d. 1Abs. 4VwVfGist die Tätigkeit der Behörde, die auf den Erlass eines Verwaltungsaktes oder den Abschluss eines öffentlichrechtlichen Vertrages abzielt. Nicht erfasst werden fiskalische Geschäfte. Die Behörde im organisationsrechtlichem Sinn wird von dem funktionalen Behördenbegriff miterfasst. Quelle:
15 vom Spielzeug zum Vermessungssystem





16 vom Spielzeug zum Vermessungssystem
17 Begriffe Drohne vom niederdeutschen drone, lautmalerisch zu Dröhnen, stammt ab vom indogermanischen dhren für brummen ( UAV Unmanned Aerial Vehicle UAS Unmanned Aerial System RPAS Remotely Piloted Aerial System
18 Öffentliche Akzeptanz Der Begriff Drohne ist mit einem Negativ Image ausgestattet und suggeriert militärische Nutzung (Waffeneinsatz). Die prinzipielle Möglichkeit des Eindringens in die Privatsphäre (z.b. durch nicht genehmigte Luftaufnahmen) ist gegeben Datenschutz! Die Berichterstattung von Unfällen mit Drohnen ist oft unsachlich.
19 UAV Systeme Kommerziell


20 UAV Systeme Kommerziell

21 UAV Systeme Wissenschaftlich bonn.de/


22 UAV Systeme In Magazinen
23 Komponenten und Workflow Luftfahrzeug (UAV) Messsystem (Sensor) Wissen (Photogrammetrie) Bildflug (Flugplanung) Kamera & Kalibrierung Bildorientierung ( triangulation) Pass und Kontrollpunkte (Partielle) Direkte Georeferenzierung RTK Endprodukte

24 Multi Kopter Technik GNSS und Kompass Akku IMU Regler Motor Kamerasteuerung Empfänger Telemetrie a little bit old fashioned



25 Professioneller Multi Kopter Riegl RiCOPTER Quelle:



26 (Semi ) Professionelle Multi Kopter DJI Inspire 2 Phantom 4 Pro Quelle:




27 Fixed Wing System Mavinci Sirius pro version/

 Quelle:")
28 Fixed Wing System (VTOL) Hybridsystem: germandrones Songbird (Vertical Take Off and Landing) Quelle:
29 Risiken Kontroll und Steuersysteme der UAV sind vielfach nicht (oder nur in Teilen) redundant. Der Ausfall einer elektronischen Komponente führt in der Regel zum Ausfall des Gesamtsystems. Pilotenausbildung vs. Automatisierter Flug Allgemeine Risikobereitschaft
30 Limitierungen Begrenzte Flugzeiten durch verfügbare Akku Kapazitäten (15 30 [60?] min) Beschränkte Navigationsqualität durch die Nutzung von 1 Frequenz GNSS Empfängern (Lage ca. 3 5m) und barometrische Höhenmessung (ca. 1m) Begrenzte Nutzlast durch administratives Gewichtslimit des zivilen UAV (5 kg)
 Beschränkte Navigationsqualität durch die Nutzung von 1 Frequenz")
 Begrenzte Nutzlast durch administratives Gewichtslimit des zivilen UAV")
31 Limitierungen Begrenzte Flugzeiten durch verfügbare Akku Kapazitäten (15 30 [60?] min) Beschränkte Navigationsqualität durch die Nutzung von 1 Frequenz GNSS Empfängern (Lage ca. 3 5m) und barometrische Höhenmessung (ca. 1m) Begrenzte Nutzlast durch administratives Gewichtslimit des zivilen UAV (5 kg)
32 Das Stativ Bei näherer Betrachtung ist der eigentliche Flugroboter nicht mehr als das Mittel zum Zweck, nämlich ein Messsystem zu transportieren und an exponierter Stelle zu platzieren, um aus dieser Position (Vogelperspektive) heraus eine geodätisch photogrammetrische Messaufgabe zu bearbeiten.
33 Komponenten des Messsystem Die Wahl der sonstigen Komponenten des Systems hat einen wesentlichen Einfluss auf das Gesamtergebnis. Welches Endprodukt soll erstellt werden? Sensor und dessen Leistungsdaten/Qualität Aufnahmekonfiguration Nutzer: individuelles Wissen im Bereich der Auswertemethodik.
34 Messsystem (Sensor) Der mit erster Priorität eingesetzte Sensor für geodätische Anwendungen ist die Digital Kamera. Die Nutzung leichter Short Range Laserscanner (Reichweite bis ca. 30 m) hat sich bisher nicht durchsetzen können. High End Laserscanner (z.b. der Firma Riegl) sind auf Grund hoher Kosten nur bedingt verfügbar.

.")
35 Messsystem (Sensor) RIEGL minivux System, Flugzeit 1.5 h; Präzision 1 cm, Genauigkeit cm abhängig von der IMU; Abastfrequenz 100 khz, Ladekapazität kg einschließlich Batterie (auch hier abhängig von der eingesetzten IMU). (Quelle: endurance altitudeyellowscans two new uav lidar mappers/)

36 Digitale Kameras In der klassischen Luftbildanwendung sind Metrische Kameras die Grundvoraussetzung für die hohe Qualität der Messergebnisse. Langzeitstabile Innere Orientierung * * Parameter, die die Geometrie einer Kamera beschreiben
37 Digitale Kameras Hersteller von UAV nutzen Kameras, die sich möglichst einfach in das Gesamtsystem integrieren lassen. Aus der Perspektive der Photogrammetrie handelt es sich in der Regel um Teilmesskameras : Bildmatrix des Sensors definiert ein Koordinatensystem Kamerakonstante & Hauptpunktlage variabel Flächenhafte Bildfehler quasi fest
38 Digitale Kameras Der Markt der Digitalkameras ist hochdynamisch, d.h. es gibt in jedem Jahr mehrere Hundert Neuerscheinungen sowie Weiterentwicklungen vorhandener Systeme.
39 Kenngrößen Sensorformat Anzahl der Pixel Größe des einzelnen Pixels (Dynamik, Signal Rauschverhalten) Objektiv Öffnungswinkel Bildstabilisatoren Einrichtungen zur Sensorreinigung Zoom / Festbrennweite Manueller Fokus Verschluss Rolling oder Global Shutter Mechanischer Zentralverschluss

40 Sensorformat (Quelle: Wikipedia)
41 Speicherformate: JPG vs. RAW Das bei vielen Kameras voreingestellte speichersparende JPG Format erzeugt verlustbehaftete Bilder gespeichert. Dies als digitales Negativ bezeichnete RAW Format ist verlustfrei und bietet dem Anwender alle Möglichkeiten einer erweiterten Bildvorverarbeitung. Nach dem digitalen Entwicklungsprozess erfolgt eine Speicherung im TIF Format



42 Auswirkungen der JPG Bildkompression 100% 80% 60% 10% JPG Kompression TIF auf die Abbildung der Targets

43 Auswirkungen der JPG Bildkompression

 auf die")
44 Auswirkungen der JPG Bildkompression 80% 60% 40% C2C absolute distances (CloudCompare) auf die Dense Point Cloud







45 Kameras der UAV Anbieter Kompaktkamera Systemkamera Spiegelreflexkamera

")

46 Kameras der UAV Anbieter DJI Kameras: Phantom 4Pro Zenmuse X4S Zenmuse X5(S) (proprietäre Systeme) (Quelle: Hersteller / eigen)

 AF / MF Optischer Bildstabilisator Nein Nein Max. Blende 1:2.8 1:2.0 / 1:1.")
 94 84 / 72 / 65 RAW Format")
47 Kenngrößen Kamera Phantom 3 Zenmuse X5 Sensortyp CMOS CMOS Sensorformat 6.2 x 4.6 mm 17.3 x 13.0 mm Sensorauflösung 12.4 MPixel 16 Mpixel Pixelgröße 1.55 µm 3.76 µm ISO Empfindlichkeit Brennweite 4 mm 12 / 15 / 17 mm Fokus (fix) AF / MF Optischer Bildstabilisator Nein Nein Max. Blende 1:2.8 1:2.0 / 1:1.7 / 1:1.8 Min. Verschlusszeit 1/8000 sec 1/8000 sec Field of View (FOV) / 72 / 65 RAW Format DNG DNG Farbtiefe k.a. 12 bit JPG Format (korrigiert bzgl. radial sym. Verzeichung) Ja Ja
48 Entwicklung DJI Kameras Kamera Phantom / Zenmuse X4S Inspire Zenmuse X5S Sensortyp CMOS CMOS Sensorformat 13.2 x 8.8 mm 17.3 x 13.0 mm (MFT) Sensorauflösung 20 MPixel 20,8 Mpixel Pixelgröße 2.4 µm 3.28 µm ISO Empfindlichkeit Brennweite 8.8 mm 12 / 15 / 17 mm Fokus (fix) AF / MF Opt. Bildstabilisator Nein Nein Max. Blende 1:2.8 1:2.0 / 1:1.7 / 1:1.8 Min. Verschlusszeit 1/2000 (mech.) 1/8000 (elektr.) sec 1/8000 sec Verschluss Zentral (mechanisch) Rolling Field of View (FOV) / 72 / 84 Gewicht ca. 260 g ca. 580 g Markteinführung November 2016 November 2016 RAW Format DNG DNG JPG Format Ja Ja

 67 67 Gewicht ca. 600 g ca. 610 g Preis ca. 2100 ca.")
49 Systemkameras Sony α7r Sony RX1RII (Quelle: Hersteller) Kamera Sony α7r Sony RX1RII Sensortyp CMOS CMOS Sensorformat 35.9 * 24 mm 35.9 * 24 mm Sensorauflösung 36.2 MPixel 42.2 MPixel Pixelgröße 4.87 µm 4.51 µm ISO Empfindlichkeit Brennweite 35 mm 35 mm Fokus AF / MF AF / MF Opt. Bildstabilisator Ja Nein Max. Blende 1:2.5 1:2.8 Min. Verschlusszeit 1/8000 sec 1/4000 sec Field of View (FOV) Gewicht ca. 600 g ca. 610 g Preis ca ca Markteinführung Oktober 2013 Oktober 2015 RAW Format Ja Ja Farbtiefe 14 bit 14 bit JPG Format Ja Ja
50 Mittelformat Kameras Tendenziell bieten sie auf Grund erweiterter Leistungsdaten die Möglichkeit verbesserte Genauigkeitsbereiche zu erschließen. Hasselblad X1D Hasselblad A5D 80 Phaseone IXU 1000 (Quelle: Hersteller / Eigen)




51 Mittelformat Kameras Tendenziell bieten sie auf Grund erweiterter Leistungsdaten die Möglichkeit verbesserte Genauigkeitsbereiche zu erschließen. Hasselblad X1D Hasselblad A5D 80 Phaseone IXU 1000 (Quelle: Hersteller / Eigen)


, IGN Camlight,")
52 Metrische Kameras Tendenziell bieten sie auf Grund stabiler Metrik die Möglichkeit verbesserte Genauigkeitsbereiche zu erschließen. MACSMicro (DLR), IGN Camlight, MACS SaR (DLR) (Quelle: Hersteller)

53 Multispektrale Kameras Multispektrale Kameras sind bildbasierte Sensoren, die die Datenerfassung über das sichtbare Spektrum hinaus erweitern. Vegetations Reflektionsgrad im sichtbaren und IR Spektrum (Quelle:


, (Thermal")
54 Multispektrale Kameras Parrot Sequoia (NIR oben) Workswell WIRIS Zenmuse XT / (FLIR VUE PRO), (Thermal unten). (Quelle: Hersteller)
55 Multispektrale Kameras Kamera Parrot Sequoia Workswell WIRIS Zenmuse XT / (FLIR VUE) Sensor Grün Rot Red Edge NIR Thermal: Ungekühlter VOx Microbolometer Thermal: Ungekühlter VOx Microbolometer Spektrales Band nm µm µm Sensorauflösung 1280*960 (4x) 336*256 / 640* *256 / 640*512 Pixelgröße 3.75 µm 17µm 17µm RGB Sensor 4608*3456 pixel 1600*1200 pixel Bildwiederholfrequenz 2 Hz /1Hz (RGB) 30 Hz (NTSC); 25 Hz (PAL) 30 Hz (NTSC); 25 Hz (PAL) Brennweite 3.98 mm / 4.9 mm (RGB) k.a mm Fokus k.a. MF MF Messgenauigkeit ±2 C / ±2% ±5 C / ±5% Betriebstemperatur 10 C bis +45 C 15 C bis +50 C 20 bis +50 C Field of View (FOV) 89.6 / 73.5 (RGB) 45 * * * 24 Maße 59 * 41 * 30 mm zzgl. 139 * 84 * 69 mm 103 * 74 * 102mm 40 * 47 * 19mm Gewicht ca. 107 g ca. 400 g 270 g Preis ca Farbtiefe k.a. 16 bit 8 / 16 bit Bild Format 4 bands: RAW 10 bit TIFF JPG JPG / TIFF RGB: JPG Video Format k.a. Ja MOV



56 Workflow: Flugplanung Flugplanung Bilddatenerfassung APP: Map Pilot


57 Flugplanung APP: Pix4DCapture
58 Aufnahmekonfiguration Die Bildflugplanung (Aufnahmekonfiguration) hat einen signifikanten Einfluss auf die Qualität des Bildverbandes sowie hieraus ableitbarer Genauigkeiten! Die von den System Anbietern bereitgestellten Softwaren berücksichtigen diesen Aspekt nur unzureichend! Photogrammetrisches Wissen ist zwingend notwendig!



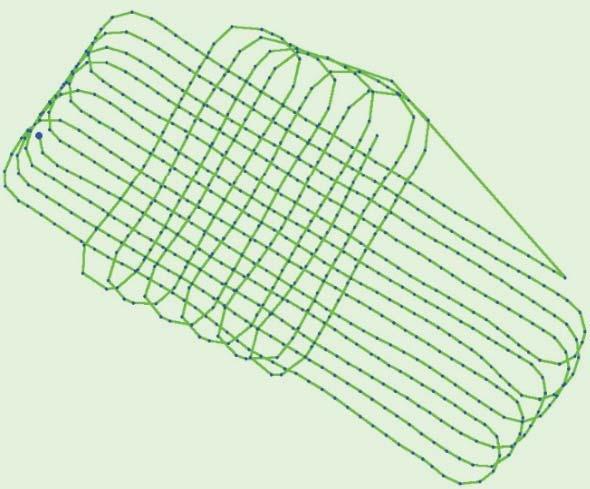
59 Kreuzbefliegung


60 Kombination aus Senkrecht und Schrägaufnahmen Ca. 110 Fotos (Kamera: Ricoh GXR)


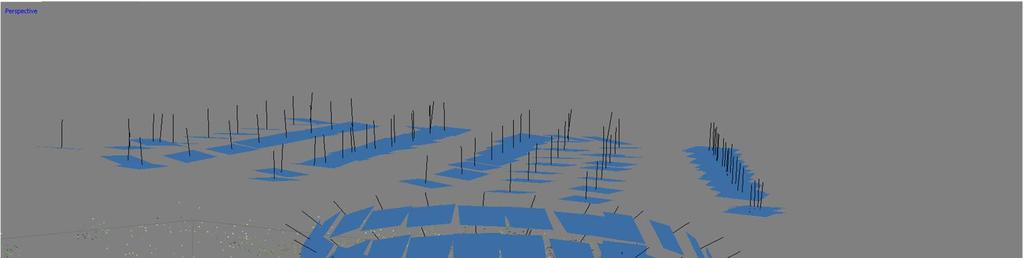
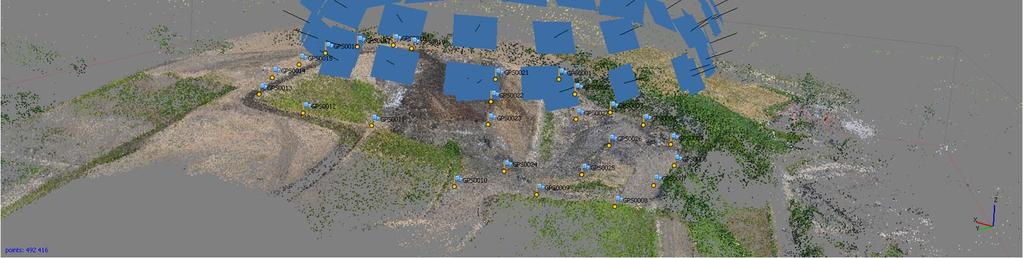
61 Workflow: Bildorientierung Merkmalsextraktion Bildorientierung Merkmalszuordnung Agisoft PhotoScan Pix4dmapper... Bündelausgleichung Sparse Point Cloud
62 Bildorientierung Berechnet werden Die Kamerapositionen (Äussere Orientierung) Die Parameter der Inneren Orientierung (der Kamera) Die 3D Koordinaten der Verknüpfungspunkte (Sparse Point Cloud)
63 Bildorientierung Zentrales Problem: Kann die Kamera im Rahmen der Auswertung (Bündelausgleichung) simultan kalibriert werden? Ja, aber die Kamerakalibrierung erfordert spezielle Aufnahmekonfigurationen Kreuzbefliegung Konvergente Aufnahmen (Rundumverband) Räumliche Objektausdehnung (Tiefeninformation)
64 Bildorientierung Bündelausgleichung Passpunkte (Lagerung) Kontrollpunkte Kontroll und Zuverlässigkeitsmaße Simultane Kamerakalibrierung Zusätzliche geodätische Beobachtungen
65 Bildorientierung Passpunkte Kontrollpunkte müssen in hinreichender Anzahl vorhanden sein [mm] RMSE [mm] GCP Phantom4PRO (TIF) /UNIFIED 14,0 12,0 10,0 8,0 6,0 4,0 2,0 0,0 45 GCP 22 GCP 12 GCP 5 GCP X Error 2,4 3,1 4,1 5,9 Y Error 3,6 4,4 5,0 6,4 Z Error 4,4 4,3 4,9 3,9 3D Error 6,2 6,9 8,1 9,6 [mm] RMSE [mm] CP Phantom4PRO (TIF) / UNIFIED 14,0 12,0 10,0 8,0 6,0 4,0 2,0 0,0 45 GCP 22 GCP 12 GCP 5 GCP X Error 2,4 2,4 3,3 Y Error 3,7 3,7 4,5 Z Error 5,9 5,5 10,1 3D Error 7,3 7,1 11,5 Kreuzbefliegung mit Phantom4PRO (Flughöhen: 50m/60m) / GSD = 14 mm


66 Bildorientierung Passpunkte Kontrollpunkte Kontroll und Zuverlässigkeitsmaße müssen in hinreichender Anzahl vorhanden sein sollten durch das Auswerteprogramm bereitgestellt werden Agisoft PhotScan: Auszug aus dem Report

67 Bildorientierung Passpunkte Kontrollpunkte Kontroll und Zuverlässigkeitsmaße müssen in hinreichender Anzahl vorhanden sein sollten durch das Auswerteprogramm bereitgestellt werden Simultane Kamerakalibrierung muss durch die Aufnahmekonfiguration gewährleistet sein
68 Bildorientierung Passpunkte Kontrollpunkte Kontroll und Zuverlässigkeitsmaße Simultane Kamerakalibrierung müssen in hinreichender Anzahl vorhanden sein sollten durch das Auswerteprogramm bereitgestellt werden muss durch die Aufnahmekonfiguration gewährleistet sein Zusätzliche geodätische Beobachtungen???


69 Realtime Kinematic GNSS

70 Realtime Kinematic GNSS 2013: Vorschlag zur Nutzung von 2 Frequenz GNSS Empfängern durch HS Bochum und Vorstellung eines Systems TOPCON B110 2 Frequenz Antenne Maxtena M1227 HCTA QUELLE: BÄUMKER ET AL. (2013)


71 Realtime Kinematic GNSS 2014: Systemintegration der genannten Komponenten im Fixed Wing System der Fa. Mavinci

 direkte Georeferenzierung")
72 Realtime Kinematic GNSS 2015: Vorstellung diverser UAV Systeme, die durch Einsatz der RTK Technologie eine (partielle) direkte Georeferenzierung ermöglichen
73 Einfluss von RTK und Fluganordnung Ist RTK GNSS geeignet Aufgaben zur Lagerung eines Bildverbandes zu übernehmen? Kann die Passpunktanzahl reduziert werden? Resultieren aus den RTK Beobachtungen Qualitätsverbesserungen bei der Bündelblockausgleichung? Welches Genauigkeits Potential bieten erweiterte Fluganordnungen? Welche Auswirkungen ergeben sich für die Simultankalibrierung der Kamera? Quelle: invariant_feature_transform
74 RTK Messungen Das RTK fähige GNSS System liefert Positionsparameter im cm Bereich. Die Aufzeichnung der GNSS Daten erfolgt mit einer Frequenz von 5 Hz. Die Genauigkeit der RTK Lösung hängt hauptsächlich davon ab, ob die Mehrdeutigkeiten ermittelt werden können (FIX), oder ob nur eine FLOAT Lösung berechnet werden kann. Quelle: invariant_feature_transform



75 RTK Messungen Qualität der RTK-Positionsdaten: BLAU GNSS Fix-Lösung ROT GNSS Float-Lösung
76 Ergebnisse RTK Messungen GCP: 3D Restabweichungen (Agisoft PhotoScan) 0,200 0,150 0,100 0,050 0,000 Cross RTK GCP GCP: 34 GCP: 18 GCP: 6 GCP: 4 0,051 0,053 0,066 0,077 RTK GCP 0,068 0,075 0,091 0,105 Cross GCP 0,056 0,065 0,062 0,040 GCP 0,071 0,086 0,084 0,069 CP: 3D Restabweichungen (Agisoft PhotoScan) 0,200 0,150 0,100 0,050 0,000 Cross RTK GCP GCP: 18 GCP: 6 GCP: 4 0,062 0,061 0,061 RTK GCP 0,082 0,086 0,087 Cross GCP 0,080 0,125 0,202 GCP 0,081 0,147 0,215 Auswirkungen der RTK-Beobachtungen auf den Bündelblock: RMSE-Werte [m] an Pass- (GCP) und Kontrollpunkten(CP)
77 Einfluss von RTK und Fluganordnung Die Erweiterung des Bildflugs durch zusätzliche Aufnahmen einer Kreuzbefliegung führt zu Genauigkeitssteigerungen, bei gleichzeitiger Reduktion notwendiger Passpunkte. Die mittels RTK GNSS gemessenen Positionsparameter der Äußeren Orientierungen führen zu einer weiteren Qualitätsverbesserung im Block. Ähnlich positive Auswirkungen sind bei der Simultankalibrierung erkennbar.

78 Typischer Workflow Flugplanung Bilddatenerfassung Merkmalsextraktion Agisoft PhotoScan Pix4dmapper... Bildorientierung Merkmalszuordnung Bündelblockausgleichung Sparse Point Cloud Dense Matching Matching Dense Point Cloud
79 Endprodukte Geodätische Endprodukte sind in der Regel bildbasiert: Luftbild zur Dokumentation und Interpretation Triangulierte/georeferenzierte Luftbilder Bündelblockausgleichung, als Vorprodukt für 3D Punktwolken (Dense Matching) Digitale Oberflächenmodelle (und daraus ableitbare Sekundärprodukte) Orthofotos (Rasterdaten)

80 3D Punktwolke Punktwolke aus TLS


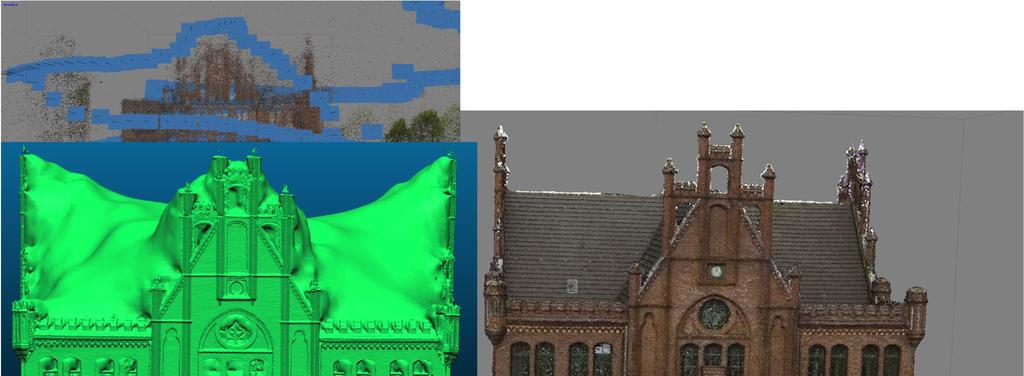
81 3D Punktwolke Oberflächenvermaschtes und texturiertes 3D Objekt (ca. 40 Mio. Punkte)

82 Sekundärprodukte Farbcodiertes digitales Geländemodell Höhenlinien


83 Sekundärprodukte Hochauflösendes Orthofoto (2 cm Bodenauflösung)
84 Zusammenfassung Entwicklungen in der Mikroelektronik sind wesentlicher Impulsgeber für den UAV Markt. Obwohl zivil einsetzbare UAVs erst am Beginn ihrer Entwicklung stehen, ist ein professioneller/ wirtschaftlicher Einsatz für geodätisch photogrammetrische Anwendungen gegeben. Photogrammetrie wird zu einem Produkt im geodätischen Massenmarkt.
85 Zusammenfassung Die Nutzung der am Markt verfügbaren Softwaren (Structure from Motion / Dense Image Matching) ist (scheinbar) ohne Vorabkenntnisse möglich Die Grundsätze der Photogrammetrie werden durch diese Verfahren jedoch nicht außer Kraft gesetzt! Kenntnisse im Bereich der Bildtriangulation und insbesondere der Sensor (Kamera ) Kalibrierung sind zwingend notwendig!
86 Zusammenfassung Die Qualität der Sensorik ist einer der Schlüssel Parameter in jeder geodätisch photogrammetrischen Anwendung. Der Sensor ist der bestimmende Faktor für die Güte der Daten, welche wiederum die Eingangsgrößen für nachfolgende Prozessierungen darstellen. Der Wahl des Sensors hier der digitalen Kamera kommt folglich eine erhebliche Bedeutung zu!
87 Zusammenfassung Die Verfügbarkeit von RTK GNSS im UAV führt zu einer Steigerung der Genauigkeit der Bildverbände, bei gleichzeitiger Reduktion des örtlichen Aufwands. Kameras mit metrischen Eigenschaften bieten ein erweitertes Genauigkeitspotential der Anwendung.
88 UAV in der Photogrammetrie: Gestern Heute Morgen?
89 Morgen die Zukunft Administration Vereinheitlichung der administrativen Regularien in der Europäischen Union Signifikant verbesserte Ausbildung der Drohnen Piloten (Kenntnisnachweis wird um eine praktische Prüfung erweitert)
90 die Zukunft Technik Die technische Innovation der UAV Hard und Systemsoftware wird ungebremst weitergehen Verbesserung der Akku Kapazitäten (Flugzeiten) Erhöhung des Payloads und damit einhergehend Nutzung von Multi Sensor Systemen
91 die Zukunft Geodäsie Photogrammetrie Optimierung der Sensorik: (Metrische) Kamera Preiswertere Scanner Multispektrale Sensoren RTK GNSS als Standard zur UAV Navigation und Lagerung von Bildverbänden (Passpunktersatz) Verbesserte Auswerte Softwaren: Erkennung von Konfigurationsdefekten im Bildverband (Teil )automatisierte Generierung vektorieller 2D und flächenhafter 3D Daten (neben den derzeitigen Rasterdaten Produkten).
92 Vielen Dank für Ihre Aufmerksamkeit Prof. Dr. Ing. Heinz Jürgen Przybilla Hochschule Bochum Fachbereich Geodäsie Labor für Photogrammetrie Lennershofstr Bochum heinz bochum.de
Unmanned Aerial Systems im Messeinsatz: Über die Systemkonfiguration zur Qualität des geodätischen Endprodukts
 Unmanned Aerial Systems im Messeinsatz: Über die Systemkonfiguration zur Qualität des geodätischen Endprodukts Prof. Dr. Ing. Heinz Jürgen Przybilla Hochschule Bochum Gliederung Historie Systemkomponenten
Unmanned Aerial Systems im Messeinsatz: Über die Systemkonfiguration zur Qualität des geodätischen Endprodukts Prof. Dr. Ing. Heinz Jürgen Przybilla Hochschule Bochum Gliederung Historie Systemkomponenten
Unmanned Aerial Systems: UFOs für alle (Mess) Fälle?
 Fälle?") Unmanned Aerial Systems: UFOs für alle (Mess) Fälle? Heinz Jürgen Przybilla Gliederung Einleitung Technische Komponenten der UAV Systeme Administrative Rahmenbedingungen Auswertung und Produkte Anwendungsbeispiel
Unmanned Aerial Systems: UFOs für alle (Mess) Fälle? Heinz Jürgen Przybilla Gliederung Einleitung Technische Komponenten der UAV Systeme Administrative Rahmenbedingungen Auswertung und Produkte Anwendungsbeispiel
UnmannedAerial Systems: UFOs für alle (Mess)-Fälle?
-Fälle?") UnmannedAerial Systems: UFOs für alle (Mess)-Fälle? Heinz-Jürgen Przybilla Gliederung Einleitung Technische Komponenten der UAV-Systeme Administrative Rahmenbedingungen Auswertung und Produkte Anwendungsbeispiel
UnmannedAerial Systems: UFOs für alle (Mess)-Fälle? Heinz-Jürgen Przybilla Gliederung Einleitung Technische Komponenten der UAV-Systeme Administrative Rahmenbedingungen Auswertung und Produkte Anwendungsbeispiel
Scannen ohne Scanner: Bildbasierte 3D Punktwolken Grundlagen, Anwendungen und Erfahrungen
 Scannen ohne Scanner: Bildbasierte 3D Punktwolken Grundlagen, Anwendungen und Erfahrungen Heinz Jürgen Przybilla Gliederung Einleitung Grundlagen Dense Image Matching / Structure from Motion Systeme Anwendungen
Scannen ohne Scanner: Bildbasierte 3D Punktwolken Grundlagen, Anwendungen und Erfahrungen Heinz Jürgen Przybilla Gliederung Einleitung Grundlagen Dense Image Matching / Structure from Motion Systeme Anwendungen
Untersuchungen zur Leistungsfähigkeit aktueller bildgebender UAV-Sensoren
 Untersuchungen zur Leistungsfähigkeit aktueller bildgebender UAV-Sensoren HEINZ JÜRGEN PRZYBILLA 1 Zusammenfassung: Das geodätisch-photogrammetrische Testfeld auf dem Areal des Industriedenkmals Zeche
Untersuchungen zur Leistungsfähigkeit aktueller bildgebender UAV-Sensoren HEINZ JÜRGEN PRZYBILLA 1 Zusammenfassung: Das geodätisch-photogrammetrische Testfeld auf dem Areal des Industriedenkmals Zeche
Untersuchungen zur Genauigkeitssteigerung von UAV-Bildflügen
 Untersuchungen zur Genauigkeitssteigerung von UAV-Bildflügen HEINZ-JÜRGEN PRZYBILLA 1, CHRISTIAN REUBER 1, MANFRED BÄUMKER 1 & MARKUS GERKE 2 Zusammenfassung: Die Erfassung photogrammetrischer Bilddaten
Untersuchungen zur Genauigkeitssteigerung von UAV-Bildflügen HEINZ-JÜRGEN PRZYBILLA 1, CHRISTIAN REUBER 1, MANFRED BÄUMKER 1 & MARKUS GERKE 2 Zusammenfassung: Die Erfassung photogrammetrischer Bilddaten
Analoge Messkameras Analoge Teil-Messkameras Analoge Nicht-Messkameras Digitale Kamerasysteme
 Inhalte Kamerasysteme in der Nahbereichsphotogrammetrie Analoge Messkameras Analoge Teil-Messkameras Analoge Nicht-Messkameras Digitale Kamerasysteme Hochauflösende Digitalkameras Scanning-Kameras Videokameras
Inhalte Kamerasysteme in der Nahbereichsphotogrammetrie Analoge Messkameras Analoge Teil-Messkameras Analoge Nicht-Messkameras Digitale Kamerasysteme Hochauflösende Digitalkameras Scanning-Kameras Videokameras
Auswertung von Bilddaten aus UAV Flügen Von der klassischen Aerotriangulation zum Dense Image. Matching
 Auswertung von Bilddaten aus UAV Flügen Von der klassischen Aerotriangulation zum Dense Image Rainer Brechtken Rouven Borchert Heinz Jürgen Przybilla Rene Marcel Roderweiß Matching Gliederung Einleitung
Auswertung von Bilddaten aus UAV Flügen Von der klassischen Aerotriangulation zum Dense Image Rainer Brechtken Rouven Borchert Heinz Jürgen Przybilla Rene Marcel Roderweiß Matching Gliederung Einleitung
Global Navigation meets Geoinformation April ESA/ESOC, Darmstadt
 28. April ESA/ESOC, Darmstadt Datenerfassung mit UAVs in Ergänzung der Fernerkundung für eine digitalisierte Welt Lothar Assenmacher, Aibotix GmbH, Kassel 1 Agenda Firmenprofil Allgemeine Grundlagen Aibot
28. April ESA/ESOC, Darmstadt Datenerfassung mit UAVs in Ergänzung der Fernerkundung für eine digitalisierte Welt Lothar Assenmacher, Aibotix GmbH, Kassel 1 Agenda Firmenprofil Allgemeine Grundlagen Aibot
NEW technologies for a better mountain FORest timber mobilization
 NEW technologies for a better mountain FORest timber mobilization UAV in der Forstwirtschaft Methoden und Grenzen Bernadette Sotier BFW - Institut für Naturgefahren Bernadette.Sotier@uibk.ac.at Innsbruck
NEW technologies for a better mountain FORest timber mobilization UAV in der Forstwirtschaft Methoden und Grenzen Bernadette Sotier BFW - Institut für Naturgefahren Bernadette.Sotier@uibk.ac.at Innsbruck
Qualitätsuntersuchung photogrammetrischer Matchingverfahren mit Schrägluftbildern. Helge Olberding, Jurij Schmik
 Qualitätsuntersuchung photogrammetrischer Matchingverfahren mit Schrägluftbildern Helge Olberding, Jurij Schmik 16. Oldenburger 3D-Tage, 01.02. - 02.02.2017 INHALT Motivation Datengrundlage Luftbilder
Qualitätsuntersuchung photogrammetrischer Matchingverfahren mit Schrägluftbildern Helge Olberding, Jurij Schmik 16. Oldenburger 3D-Tage, 01.02. - 02.02.2017 INHALT Motivation Datengrundlage Luftbilder
Generierung dichter Punktwolken mit UAS-Software -- Empirische Genauigkeitsuntersuchung
 Hao PANG Generierung dichter Punktwolken mit UAS-Software -- Empirische Genauigkeitsuntersuchung Dauer der Arbeit: 6 Monaten Abschluss: Mai 2015 Betreuer: Dr. -Ing. Michael Cramer Prüfer: Prof. Dr.-Ing.
Hao PANG Generierung dichter Punktwolken mit UAS-Software -- Empirische Genauigkeitsuntersuchung Dauer der Arbeit: 6 Monaten Abschluss: Mai 2015 Betreuer: Dr. -Ing. Michael Cramer Prüfer: Prof. Dr.-Ing.
Befliegung mit UAV Ausgewählte Beispiele für ingenieurtechnische Anwendungen
 Befliegung mit UAV Ausgewählte Beispiele für ingenieurtechnische Anwendungen Dipl.-Ing. Andreas Schmidt-Böllert Gliederung Aufnahmesensoren Anwendungsbeispiele für UAV Multirotor G4 Surveying Robot Aufstiegsgenehmigungen
Befliegung mit UAV Ausgewählte Beispiele für ingenieurtechnische Anwendungen Dipl.-Ing. Andreas Schmidt-Böllert Gliederung Aufnahmesensoren Anwendungsbeispiele für UAV Multirotor G4 Surveying Robot Aufstiegsgenehmigungen
Nutzen von Drohnendaten
 Nutzen von Drohnendaten Nutzen von Drohnendaten Die allnav ag ist kompletter Lösungsanbieter im Bereich UAS Jürg Pulfer Applikationsingenieur MEB Group allnav als wichtiger Bestandteil der MEB Group Experten
Nutzen von Drohnendaten Nutzen von Drohnendaten Die allnav ag ist kompletter Lösungsanbieter im Bereich UAS Jürg Pulfer Applikationsingenieur MEB Group allnav als wichtiger Bestandteil der MEB Group Experten
Geodätisches Kolloquium
 Geodätisches Kolloquium Projekte der Ingenieurvermessung DVW NRW e.v. Gesellschaft für Geodäsie Geoinformation und Landmanagement Deutscher Dachverband für Geoinformation e.v. Hochschule Bochum DVW VDV
Geodätisches Kolloquium Projekte der Ingenieurvermessung DVW NRW e.v. Gesellschaft für Geodäsie Geoinformation und Landmanagement Deutscher Dachverband für Geoinformation e.v. Hochschule Bochum DVW VDV
RPAS im operationellen Einsatz beim LGL Baden-Württemberg 3D-Dokumentation von Hangrutschungen
 1 Institut für Photogrammetrie RPAS im operationellen Einsatz beim LGL Baden-Württemberg 3D-Dokumentation von Hangrutschungen Michael Cramer LGL Forum Gelsenkirchen, 4.-5. Juni 2014 Geportal Baden-Württemberg
1 Institut für Photogrammetrie RPAS im operationellen Einsatz beim LGL Baden-Württemberg 3D-Dokumentation von Hangrutschungen Michael Cramer LGL Forum Gelsenkirchen, 4.-5. Juni 2014 Geportal Baden-Württemberg
UAS-gestützte Datenerfassung für Anwendungen in der Landesvermessung
 1 Institut für Photogrammetrie ifp UAS-gestützte Datenerfassung für Anwendungen in der Landesvermessung Michael Cramer Hamburg, 11.-12. Juni 2014 Definition Landesvermessung Einführung Die Landesvermessung
1 Institut für Photogrammetrie ifp UAS-gestützte Datenerfassung für Anwendungen in der Landesvermessung Michael Cramer Hamburg, 11.-12. Juni 2014 Definition Landesvermessung Einführung Die Landesvermessung
Methoden und Verfahren zur automatisierten Auswertung
 Inhalte Bildtriangulation Grundlagen Blockausgleichung mit unabhängigen Modellen Bündelblockausgleichung Methoden und Verfahren zur automatisierten Auswertung H.-J. Przybilla Bündelblockausgleichung 1
Inhalte Bildtriangulation Grundlagen Blockausgleichung mit unabhängigen Modellen Bündelblockausgleichung Methoden und Verfahren zur automatisierten Auswertung H.-J. Przybilla Bündelblockausgleichung 1
Sensorenvergleich (Zeilen vs. Flächenscanner) Prof. Dr.-Ing. Manfred Ehlers
 Prof. Dr.-Ing. Manfred Ehlers") Sensorenvergleich (Zeilen vs. Flächenscanner) Prof. Dr.-Ing. Manfred Ehlers mehlers@igf.uni-osnabrueck.de Inhalt Sensorsysteme ADS-40 DMC Ultracam-D Flächen vs. Zeilensensor Geometrische Genauigkeit Pansharpening
Sensorenvergleich (Zeilen vs. Flächenscanner) Prof. Dr.-Ing. Manfred Ehlers mehlers@igf.uni-osnabrueck.de Inhalt Sensorsysteme ADS-40 DMC Ultracam-D Flächen vs. Zeilensensor Geometrische Genauigkeit Pansharpening
DMT Pilot 3D Mobile Mapping mit dem DMT Pilot 3D unter Tage M.Sc. Daniel Schröder
 Mobile Mapping mit dem unter Tage M.Sc. Daniel Schröder Idee 3-in-1 System zur präzisen Positions- und Lagebestimmung, Navigation und 3D-Dokumentation Technologie des DLR für die autonome Navigation eines
Mobile Mapping mit dem unter Tage M.Sc. Daniel Schröder Idee 3-in-1 System zur präzisen Positions- und Lagebestimmung, Navigation und 3D-Dokumentation Technologie des DLR für die autonome Navigation eines
Quantifizierung von Bodenabtragsflächen auf Alpinen Grashängen (Projekt QUA-BA)
") Quantifizierung von Bodenabtragsflächen auf Alpinen Grashängen (Projekt QUA-BA) Clemens Geitner, Andreas Mayr & Martin Rutzinger Institut für Geographie, Universität Innsbruck Clemens Geitner Jahrestreffen
Quantifizierung von Bodenabtragsflächen auf Alpinen Grashängen (Projekt QUA-BA) Clemens Geitner, Andreas Mayr & Martin Rutzinger Institut für Geographie, Universität Innsbruck Clemens Geitner Jahrestreffen
Datenerfassung mit UAS Pilotprojekte am LGL
 1 Institut für Photogrammetrie Datenerfassung mit UAS Pilotprojekte am LGL Michael Cramer LGL Forum Haus der Wirtschaft, Stuttgart 13. Mai 2014 2 RPAS Namen & Definitionen Weigand, Ute: UAS für zivile
1 Institut für Photogrammetrie Datenerfassung mit UAS Pilotprojekte am LGL Michael Cramer LGL Forum Haus der Wirtschaft, Stuttgart 13. Mai 2014 2 RPAS Namen & Definitionen Weigand, Ute: UAS für zivile
Einsatz einer low cost Drohne. für hochauflösende Fernerkundung. in der Forstwirtschaft
 Einsatz einer low cost Drohne für hochauflösende Fernerkundung in der Forstwirtschaft Kai Jütte, Landesforst Mecklenburg-Vorpommern -Anstalt öffentlichen Rechts- Betriebsteil Forstliche Informationssysteme
Einsatz einer low cost Drohne für hochauflösende Fernerkundung in der Forstwirtschaft Kai Jütte, Landesforst Mecklenburg-Vorpommern -Anstalt öffentlichen Rechts- Betriebsteil Forstliche Informationssysteme
Kalibrierung. HJ Przybilla
 Kalibrierung Die Kalibrierung von Aufnahmesystemen dient der Bestimmung des geometrischen Kameramodells, beschrieben durch die Parameter der inneren Orientierung. Kamerakonstante Lage des Bildhauptpunktes
Kalibrierung Die Kalibrierung von Aufnahmesystemen dient der Bestimmung des geometrischen Kameramodells, beschrieben durch die Parameter der inneren Orientierung. Kamerakonstante Lage des Bildhauptpunktes
Inhalte. Methoden und Verfahren zur automatisierten Auswertung Bildtriangulation
 Inhalte Methoden und Verfahren zur automatisierten Auswertung Bildtriangulation Grundlagen Blockausgleichung mit unabhängigen Modellen Bündelblockausgleichung HS BO Lab. für Photogrammetrie: Bildtriangulation
Inhalte Methoden und Verfahren zur automatisierten Auswertung Bildtriangulation Grundlagen Blockausgleichung mit unabhängigen Modellen Bündelblockausgleichung HS BO Lab. für Photogrammetrie: Bildtriangulation
Neue Vermessungswege mit Drohnen -
 Neue Vermessungswege mit Drohnen - Platzhalter für Bild / Grafik Wo UAV s die herkömmliche Vermessung ergänzen können Stefan Brumme, RIWA GmbH Aufzählung oder Text Begriffe / Glossar UAV (Unmanned Aerial
Neue Vermessungswege mit Drohnen - Platzhalter für Bild / Grafik Wo UAV s die herkömmliche Vermessung ergänzen können Stefan Brumme, RIWA GmbH Aufzählung oder Text Begriffe / Glossar UAV (Unmanned Aerial
UAV/Drohne. Kompetenzen/Referenzen. Stand Donatsch + Partner AG. Prättigauerstrasse 34 CH Landquart
 UAV/Drohne Kompetenzen/Referenzen Stand 19.02.2016 Donatsch + Partner AG Prättigauerstrasse 34 CH -7302 Landquart +41 81 307 89 00 landquart@donatsch.ch 1 Vermessung aus der Luft Wir bieten nun seit 3
UAV/Drohne Kompetenzen/Referenzen Stand 19.02.2016 Donatsch + Partner AG Prättigauerstrasse 34 CH -7302 Landquart +41 81 307 89 00 landquart@donatsch.ch 1 Vermessung aus der Luft Wir bieten nun seit 3
Qualität der ALS50 Laserscanner Daten Befliegung Vaihingen/Enz
 Qualität der ALS50 Laserscanner Daten Befliegung Vaihingen/Enz Camillo Ressl, Matthias Ockermüller, Helmut Kager Institut für Photogrammetrie und Fernerkundung (I.P.F.), Technische Universität Wien www.ipf.tuwien.ac.at
Qualität der ALS50 Laserscanner Daten Befliegung Vaihingen/Enz Camillo Ressl, Matthias Ockermüller, Helmut Kager Institut für Photogrammetrie und Fernerkundung (I.P.F.), Technische Universität Wien www.ipf.tuwien.ac.at
Inhalte. Photogram. Aufnahmesysteme. HS BO Lab. für Photogrammetrie: Digitalisierung analoger Bilder 1
 Inhalte Photogram. Aufnahmesysteme Metrische Kameras (Definition der Inneren Orientierung) Analoge Messkameras Fotografische Aspekte Digitalisierung analoger Bilder Digitale Aufnahmesysteme (Messkameras)
Inhalte Photogram. Aufnahmesysteme Metrische Kameras (Definition der Inneren Orientierung) Analoge Messkameras Fotografische Aspekte Digitalisierung analoger Bilder Digitale Aufnahmesysteme (Messkameras)
Aufnahmeverfahren zur 3D-Modellierung von Stauanlagen. Masterarbeit HS 2011 Amanda Zwicky
 Aufnahmeverfahren zur 3D-Modellierung von Stauanlagen Masterarbeit HS 2011 Amanda Zwicky Aufgabenstellung Bisher punktuelle Bestimmung von Verschiebungen an Staumauern Zusammenarbeit mit axpo (Herr U.
Aufnahmeverfahren zur 3D-Modellierung von Stauanlagen Masterarbeit HS 2011 Amanda Zwicky Aufgabenstellung Bisher punktuelle Bestimmung von Verschiebungen an Staumauern Zusammenarbeit mit axpo (Herr U.
Geodatenerfassung mit UAS. Prof. Dr. Ansgar Greiwe Labor für Photogrammetrie und Fernerkundung FH Frankfurt am Main
 Geodatenerfassung mit UAS Prof. Dr. Ansgar Greiwe Labor für Photogrammetrie und Fernerkundung FH Frankfurt am Main Inhalt UAS Rahmenbedingungen Rechtliche Grenzen Äußere Einflüsse Sensoren Auswertungsansätze
Geodatenerfassung mit UAS Prof. Dr. Ansgar Greiwe Labor für Photogrammetrie und Fernerkundung FH Frankfurt am Main Inhalt UAS Rahmenbedingungen Rechtliche Grenzen Äußere Einflüsse Sensoren Auswertungsansätze
geo-konzept GmbH Martin Herkommer (Dipl.-Geogr. univ) geo-konzept GmbH, Gut Wittenfeld, D Adelschlag
 geo-konzept GmbH, Gut Wittenfeld, D Adelschlag") Martin Herkommer (Dipl.-Geogr. univ) geo-konzept GmbH,, How remote sensing works Folie 2 Folie 3 geo-konzept GmbH Inhalt 1. Technik 2. Gesetzliche Rahmenbedingungen 3. Physikalische Rahmenbedingungen 4.
Martin Herkommer (Dipl.-Geogr. univ) geo-konzept GmbH,, How remote sensing works Folie 2 Folie 3 geo-konzept GmbH Inhalt 1. Technik 2. Gesetzliche Rahmenbedingungen 3. Physikalische Rahmenbedingungen 4.
Photogrammetrie mittels UAV (unmanned aereal vehicle) Versuchsprojekt Kiesgrube Fa. Glück Hochbirket
 Versuchsprojekt Kiesgrube Fa. Glück Hochbirket") Photogrammetrie mittels UAV (unmanned aereal vehicle) Versuchsprojekt Kiesgrube Fa. Glück Hochbirket David Mauro, Geospector München, Herbst 2013 in Zusammenarbeit mit Partnern aus der Vermessungsbrancher
Photogrammetrie mittels UAV (unmanned aereal vehicle) Versuchsprojekt Kiesgrube Fa. Glück Hochbirket David Mauro, Geospector München, Herbst 2013 in Zusammenarbeit mit Partnern aus der Vermessungsbrancher
Analoge Messkameras. HS BO Lab. für Photogrammetrie: Analoge Messkameras 1
 Analoge Messkameras HS BO Lab. für Photogrammetrie: Analoge Messkameras 1 Luftbildmesskameras Luftbildmesskameras (Reihenmesskameras) sind großformatige filmbasierte Messkameras. In der Luftbildphotogrammetrie
Analoge Messkameras HS BO Lab. für Photogrammetrie: Analoge Messkameras 1 Luftbildmesskameras Luftbildmesskameras (Reihenmesskameras) sind großformatige filmbasierte Messkameras. In der Luftbildphotogrammetrie
Zur Georeferenzierung von UAV Bildflügen: direkt oder indirekt, was braucht man dafür? Lasse Klingbeil Christian Eling Heiner Kuhlmann
 Zur Georeferenzierung von UAV Bildflügen: direkt oder indirekt, was braucht man dafür? Lasse Klingbeil Christian Eling Heiner Kuhlmann Institut für Geodäsie und Geoinformation Rheinische Friedrich-Wilhelms-Universität
Zur Georeferenzierung von UAV Bildflügen: direkt oder indirekt, was braucht man dafür? Lasse Klingbeil Christian Eling Heiner Kuhlmann Institut für Geodäsie und Geoinformation Rheinische Friedrich-Wilhelms-Universität
 www.div-gmbh-drohne.de div-gmbh datenverarbeitungs-, informationssystem- und vermessungsgesellschaft mbh anschrift gertraudenstraße 10 16540 hohen neuendorf fon 0 33 03 21 46 0 fax 0 33 03 21 46 61 web
www.div-gmbh-drohne.de div-gmbh datenverarbeitungs-, informationssystem- und vermessungsgesellschaft mbh anschrift gertraudenstraße 10 16540 hohen neuendorf fon 0 33 03 21 46 0 fax 0 33 03 21 46 61 web
Grundlagen der optischen Geometrievermessung und deren Anwendungen
 Grundlagen der optischen Geometrievermessung und deren Anwendungen Christian Gerlach Innovationstag 2010 1 Gliederung: Grundlagen der Photogrammetrie Stand der Technik Industrielle Anwendungen der Photogrammetrie
Grundlagen der optischen Geometrievermessung und deren Anwendungen Christian Gerlach Innovationstag 2010 1 Gliederung: Grundlagen der Photogrammetrie Stand der Technik Industrielle Anwendungen der Photogrammetrie
Aktuelle Anwendungen in der Fotogrammetrie
 Aktuelle Anwendungen in der Fotogrammetrie SOGI Feierabend Forum, Basel 19.11.2014 / Fabian Huber Folie 1 Agenda KOPA und KOPA Geoservices GmbH Fotogrammetrie heute Plattformen für fotogrammetrische Aufnahmen
Aktuelle Anwendungen in der Fotogrammetrie SOGI Feierabend Forum, Basel 19.11.2014 / Fabian Huber Folie 1 Agenda KOPA und KOPA Geoservices GmbH Fotogrammetrie heute Plattformen für fotogrammetrische Aufnahmen
Susanne Haußmann. Aerotriangulation eines Bildverbandes des Stuttgarter Adlers
 Susanne Haußmann Aerotriangulation eines Bildverbandes des Stuttgarter Adlers Dauer der Arbeit: 3 Monate Abschluss: Juli 2010 Betreuer: Dr.-Ing. Michael Cramer (ifp), Dipl.-Ing. Ursula Kirchgäßner (IRS)
Susanne Haußmann Aerotriangulation eines Bildverbandes des Stuttgarter Adlers Dauer der Arbeit: 3 Monate Abschluss: Juli 2010 Betreuer: Dr.-Ing. Michael Cramer (ifp), Dipl.-Ing. Ursula Kirchgäßner (IRS)
Analoge Messkameras Analoge Teil-Messkameras Analoge Nicht-Messkameras Digitale Kamerasysteme
 Inhalte Kamerasysteme in der Nahbereichsphotogrammetrie Analoge Messkameras Analoge Teil-Messkameras Analoge Nicht-Messkameras Digitale Kamerasysteme Hochauflösende Digitalkameras Scanning-Kameras Videokameras
Inhalte Kamerasysteme in der Nahbereichsphotogrammetrie Analoge Messkameras Analoge Teil-Messkameras Analoge Nicht-Messkameras Digitale Kamerasysteme Hochauflösende Digitalkameras Scanning-Kameras Videokameras
Bildbasierte 3D Punktwolken Grundlagen, Anwendungen und Erfahrungen
 Bildbasierte 3D Punktwolken Grundlagen, Anwendungen und Erfahrungen Heinz Jürgen Przybilla Gliederung Einleitung Grundlagen Structure from Motion (SIFT und RANSAC Algorithmen) Bündelblockausgleichung Dense
Bildbasierte 3D Punktwolken Grundlagen, Anwendungen und Erfahrungen Heinz Jürgen Przybilla Gliederung Einleitung Grundlagen Structure from Motion (SIFT und RANSAC Algorithmen) Bündelblockausgleichung Dense
Stabilitätsprüfung projizierter Referenzpunkte für die Erfassung großvolumiger Messobjekte
 Stabilitätsprüfung projizierter Referenzpunkte für die Erfassung großvolumiger Messobjekte Murat ÜRÜN, Manfred WIGGENHAGEN, Hubertus NITSCHKE, Christian HEIPKE VWN Hannover, IPI Universität Hannover IPI
Stabilitätsprüfung projizierter Referenzpunkte für die Erfassung großvolumiger Messobjekte Murat ÜRÜN, Manfred WIGGENHAGEN, Hubertus NITSCHKE, Christian HEIPKE VWN Hannover, IPI Universität Hannover IPI
Eidgenössische Technische Hochschule Zürich DARCH Institut Denkmalpflege und Bauforschung. IDB Institut für Denkmalpflege und Bauforschung
 IDB Institut für Denkmalpflege Kombination von Tachymetrie und Nahbereichsphotogrammetrie zur Modellierung eines verstürzten Giebels in Kalapodi, Griechenland Silke Langenberg, Martin Sauerbier Institut
IDB Institut für Denkmalpflege Kombination von Tachymetrie und Nahbereichsphotogrammetrie zur Modellierung eines verstürzten Giebels in Kalapodi, Griechenland Silke Langenberg, Martin Sauerbier Institut
Aufnahme von Waldparametern mittels Drohnendaten
 Aufnahme von Waldparametern mittels Drohnendaten Workshop 02/2016 TLUG Jena Biotopkartierung in Thüringen PD Dr. Christian Thiel Waldparameter per Drohnendaten PD Dr. Christian Thiel 25. Februar 2016 1
Aufnahme von Waldparametern mittels Drohnendaten Workshop 02/2016 TLUG Jena Biotopkartierung in Thüringen PD Dr. Christian Thiel Waldparameter per Drohnendaten PD Dr. Christian Thiel 25. Februar 2016 1
VIS/NIR HSI Basic. » High Performance Hyper Spectral Imaging. » Datenblatt. Kontinuierlicher VIS/NIR Hyperspektral Pushbroom Imager
 » High Performance Hyper Spectral Imaging» Datenblatt Der HSI Basic Pushbroom Imager ist ein integriertes Laborgerät für die kombinierte Farb- und chemische Analyse. Das System setzt die Chemical Color
» High Performance Hyper Spectral Imaging» Datenblatt Der HSI Basic Pushbroom Imager ist ein integriertes Laborgerät für die kombinierte Farb- und chemische Analyse. Das System setzt die Chemical Color
Erfassung untertägiger Hohlräume mit dem IPS-System bei der RAG Aktiengesellschaft Volker Spreckels, Andreas Schlienkamp
 Erfassung untertägiger Hohlräume mit dem IPS-System bei der Volker Spreckels, Andreas Schlienkamp IPS - Forschung und Entwicklung (FuE) Bei DLR entwickelt für Indoor-Navigation IPS = Integrated Positioning
Erfassung untertägiger Hohlräume mit dem IPS-System bei der Volker Spreckels, Andreas Schlienkamp IPS - Forschung und Entwicklung (FuE) Bei DLR entwickelt für Indoor-Navigation IPS = Integrated Positioning
Der Forschungsgyrocopter der Hochschule Anhalt als Sensorträger
 Der Forschungsgyrocopter der Hochschule Anhalt als Sensorträger M.Eng. Tobias Kirschke Prof. Dr. Lothar Koppers Prof. Dr. Lutz Bannehr M.Eng. Christoph Ulrich Institut für Geoinformation und Vermessung
Der Forschungsgyrocopter der Hochschule Anhalt als Sensorträger M.Eng. Tobias Kirschke Prof. Dr. Lothar Koppers Prof. Dr. Lutz Bannehr M.Eng. Christoph Ulrich Institut für Geoinformation und Vermessung
UNI Duisburg-Essen FB11 Photogrammetrie-Klausur Teil Matrikel-Nr.:
 1. Nennen Sie je 2 typische Anwendungen aus den Bereichen (6 Punkte) a. Nahbereichsphotogrammetrie b. Luftbildphotogrammetrie c. Fernerkundung 2. Nennen Sie je 2 typische Sensoren aus den Bereichen (6
1. Nennen Sie je 2 typische Anwendungen aus den Bereichen (6 Punkte) a. Nahbereichsphotogrammetrie b. Luftbildphotogrammetrie c. Fernerkundung 2. Nennen Sie je 2 typische Sensoren aus den Bereichen (6
Machine Vision Objektive
 Machine Vision Objektive 2 Megapixel Objektive 2 MEGAPIXEL OBJEKTIVE 1/2" und 2/3" Die bewährte Serie von 2 Megapixel Objektiven für viele Anwendungsbereiche: Wählen Sie das beste Objektiv für Ihre Anforderung
Machine Vision Objektive 2 Megapixel Objektive 2 MEGAPIXEL OBJEKTIVE 1/2" und 2/3" Die bewährte Serie von 2 Megapixel Objektiven für viele Anwendungsbereiche: Wählen Sie das beste Objektiv für Ihre Anforderung
Beifach Geodäsie für Geographie (B.Sc.)
") Grundmodule Modul Bezeichnung Semester Lehrformen Leistungspunkte BfGeodGeogB01 Terrestrische Datenerfassung 2. o. 4. 3V / 1Ü / 5P 7.0 BfGeodGeogB02 Photogrammetrie für Anwender 2. o. 4. 2V / 2Ü 5.0 Erweiterungsmodule
Grundmodule Modul Bezeichnung Semester Lehrformen Leistungspunkte BfGeodGeogB01 Terrestrische Datenerfassung 2. o. 4. 3V / 1Ü / 5P 7.0 BfGeodGeogB02 Photogrammetrie für Anwender 2. o. 4. 2V / 2Ü 5.0 Erweiterungsmodule
Architekturphotogrammetrie mit kalibrierten Digitalkameras
 Architekturphotogrammetrie mit kalibrierten Digitalkameras by M.Sc. Ergebnisse einer Studie, die an der ITU Istanbul in Zusammenarbeit mit der HfT Stuttgart durchgeführt wurde Agenda Problematik Kamerakalibrierung
Architekturphotogrammetrie mit kalibrierten Digitalkameras by M.Sc. Ergebnisse einer Studie, die an der ITU Istanbul in Zusammenarbeit mit der HfT Stuttgart durchgeführt wurde Agenda Problematik Kamerakalibrierung
Kalibrierung von Oblique- und UAV Kameras
 Kalibrierung von Oblique- und UAV Kameras ERWIN J. KRUCK 1 & BALÁZS MÉLYKUTI 2 Oblique Kalibrierungen haben wegen der nicht vertikalen Blickwinkel andere geometrische Voraussetzungen als Standard-Befliegungen.
Kalibrierung von Oblique- und UAV Kameras ERWIN J. KRUCK 1 & BALÁZS MÉLYKUTI 2 Oblique Kalibrierungen haben wegen der nicht vertikalen Blickwinkel andere geometrische Voraussetzungen als Standard-Befliegungen.
Entwicklung eines fächerartigen Distanzmesssystems zur Messung von Rotorblättern. Konzept, Orientierung und erste Ergebnisse
 Entwicklung eines fächerartigen Distanzmesssystems zur Messung von Rotorblättern Konzept, Orientierung und erste Ergebnisse Martina Göring M.Sc. & Prof. Dr. Thomas Luhmann AUFGABENSTELLUNG Entwicklung
Entwicklung eines fächerartigen Distanzmesssystems zur Messung von Rotorblättern Konzept, Orientierung und erste Ergebnisse Martina Göring M.Sc. & Prof. Dr. Thomas Luhmann AUFGABENSTELLUNG Entwicklung
Praktischer Einsatz der Drohnenbefliegung in der Vermessung
 Praktischer Einsatz der Drohnenbefliegung in der Vermessung Arbeitsablauf und Herausforderungen Vermessungsbüro Käser Ingenieure GbR Geschäftsführer: Helmut Käser und Matthias Käser Mitarbeiter: ca. 40
Praktischer Einsatz der Drohnenbefliegung in der Vermessung Arbeitsablauf und Herausforderungen Vermessungsbüro Käser Ingenieure GbR Geschäftsführer: Helmut Käser und Matthias Käser Mitarbeiter: ca. 40
Low-Cost vs. High-End Systeme im Vergleich 3D-Aufnahme der Ringwallanlage Lembecksburg auf der Nordseeinsel Föhr 1 / 37
 HCU HafenCityUniversität Universität für Baukunst und Metropolenentwicklung HAMBURGS NEUE UNIVERSITÄT Europas erste Universität für die bebaute Umwelt T. Kersten, M. Lindstaedt, K. Mechelke, D. Omelanowsky
HCU HafenCityUniversität Universität für Baukunst und Metropolenentwicklung HAMBURGS NEUE UNIVERSITÄT Europas erste Universität für die bebaute Umwelt T. Kersten, M. Lindstaedt, K. Mechelke, D. Omelanowsky
Drohnen in der Bauwirtschaft
 Drohnen in der Bauwirtschaft Schadensdiagnose Beweissicherung Datenerfassung 3D-Berechnung Dokumentation Überwachung Monitoring Zukunft SCHÄDEN AN GEBÄUDEN bundesweit, DROHNE-BEWEISSICHERUNG.COM Dipl.-Ing.
Drohnen in der Bauwirtschaft Schadensdiagnose Beweissicherung Datenerfassung 3D-Berechnung Dokumentation Überwachung Monitoring Zukunft SCHÄDEN AN GEBÄUDEN bundesweit, DROHNE-BEWEISSICHERUNG.COM Dipl.-Ing.
Orientierung. HJ Przybilla
 Orientierung Der Begriff der Orientierung wird in der Photogrammetrie vielfach genutzt. Er beschreibt dabei die geometrischen Zusammenhänge im und um das Messbild. Innere Orientierung Äußere Orientierung
Orientierung Der Begriff der Orientierung wird in der Photogrammetrie vielfach genutzt. Er beschreibt dabei die geometrischen Zusammenhänge im und um das Messbild. Innere Orientierung Äußere Orientierung
PRODUKTKATALOG 2012/13
 PRODUKTKATALOG 2012/13 Sehr geehrte Damen und Herren! Wir bedanken uns für das Interesse an unseren Multirotorsystemen, Kameraplattformen und Zubehör. Auf den folgenden Seiten finden Sie einen Überblick
PRODUKTKATALOG 2012/13 Sehr geehrte Damen und Herren! Wir bedanken uns für das Interesse an unseren Multirotorsystemen, Kameraplattformen und Zubehör. Auf den folgenden Seiten finden Sie einen Überblick
Elektrolumineszenzaufnahmen aus der Luft
 Elektrolumineszenzaufnahmen aus der Luft mit stativ- und flugrobotergestützten Aufnahmesystemen Fladung Solartechnik GmbH aerial photovoltaic inspection / aepvi.com Sachverständigenbüro für Photovoltaik
Elektrolumineszenzaufnahmen aus der Luft mit stativ- und flugrobotergestützten Aufnahmesystemen Fladung Solartechnik GmbH aerial photovoltaic inspection / aepvi.com Sachverständigenbüro für Photovoltaik
Zur Bedeutung von Passpunkten bei der Aerotriangulation UAV-basierter Bildflüge
 Zur Bedeutung von Passpunkten bei der Aerotriangulation UAV-basierter Bildflüge Maren Lindstaedt Thomas P. Kersten 1 Einführung Unmanned Aerial Vehicles (UAV), Unmanned Aerial Systems (UAS) oder Remotely-Piloted
Zur Bedeutung von Passpunkten bei der Aerotriangulation UAV-basierter Bildflüge Maren Lindstaedt Thomas P. Kersten 1 Einführung Unmanned Aerial Vehicles (UAV), Unmanned Aerial Systems (UAS) oder Remotely-Piloted
Optik in Smartphones. Proseminar Technische Informatik Fabio Becker 9. Juli 2014
 Optik in Smartphones Proseminar Technische Informatik Fabio Becker 9. Juli 2014 1 Gliederung Die Kamera Grundidee für das Smartphone Grundlagen zur Optik Skalierung Aufbau Ziele/Trend in Zukunft Zusammenfassung
Optik in Smartphones Proseminar Technische Informatik Fabio Becker 9. Juli 2014 1 Gliederung Die Kamera Grundidee für das Smartphone Grundlagen zur Optik Skalierung Aufbau Ziele/Trend in Zukunft Zusammenfassung
Unbemannte Flugsysteme (UAS/RPAS) Anwendungsmöglichkeiten in der Fernerkundung
 Anwendungsmöglichkeiten in der Fernerkundung") Unbemannte Flugsysteme (UAS/RPAS) Anwendungsmöglichkeiten in der Fernerkundung Heigh Tech Blom 21. Januar 2016 Geonetzwerk.metropole Ruhr Peter Loef AIR e.v. Vorstand FhG-FKIE CENALO Folie 1 Übersicht
Unbemannte Flugsysteme (UAS/RPAS) Anwendungsmöglichkeiten in der Fernerkundung Heigh Tech Blom 21. Januar 2016 Geonetzwerk.metropole Ruhr Peter Loef AIR e.v. Vorstand FhG-FKIE CENALO Folie 1 Übersicht
DROHNENINSPEKTION ZERTIFIZIERTE WERKSTOFFPRÜFUNG MITTELS DROHNENINSPEKTION
 DROHNENINSPEKTION ZERTIFIZIERTE WERKSTOFFPRÜFUNG MITTELS DROHNENINSPEKTION 2 3 Unser Angebot Wir bieten zertifizierte Brückeninspektionen Solar- Photovoltaikanlagen Hochspannungsleitungen Telekommunikation
DROHNENINSPEKTION ZERTIFIZIERTE WERKSTOFFPRÜFUNG MITTELS DROHNENINSPEKTION 2 3 Unser Angebot Wir bieten zertifizierte Brückeninspektionen Solar- Photovoltaikanlagen Hochspannungsleitungen Telekommunikation
] air luftbildvermessung &
![] air luftbildvermessung &](/thumbs/72/67020073.jpg "] air luftbildvermessung &") luftbildvermessung & analyse Die Welt aus der Vogelperspektive Unmanned Aerial Systems (UAS) im Bereich der Geowissenschaften Matthias Jochner GIS Day 16.11.2016 Persönlicher Hintergrund PhD Studium seit
luftbildvermessung & analyse Die Welt aus der Vogelperspektive Unmanned Aerial Systems (UAS) im Bereich der Geowissenschaften Matthias Jochner GIS Day 16.11.2016 Persönlicher Hintergrund PhD Studium seit
Hagelschaden 3D Dachinspektion
 Fallstudie Hagelschaden 3D Dachinspektion Erstellung eines 3D-Modells durch Photogrammetrie und Begutachtung der Dachschäden mit Detailaufnahmen Autor: Matthias Pletl Firma: BavarianDrone (www.bavarian-drone.de)
Fallstudie Hagelschaden 3D Dachinspektion Erstellung eines 3D-Modells durch Photogrammetrie und Begutachtung der Dachschäden mit Detailaufnahmen Autor: Matthias Pletl Firma: BavarianDrone (www.bavarian-drone.de)
Röntgenkameras für den industriellen Einsatz
 Röntgenkameras für den industriellen Einsatz Dr. Peter Schmitt, Rolf Behrendt Fraunhofer Institut für Integrierte Schaltungen Am Wolfsmantel 33, 91058 Erlangen Dr. Norman Uhlmann Fraunhofer Entwicklungszentrum
Röntgenkameras für den industriellen Einsatz Dr. Peter Schmitt, Rolf Behrendt Fraunhofer Institut für Integrierte Schaltungen Am Wolfsmantel 33, 91058 Erlangen Dr. Norman Uhlmann Fraunhofer Entwicklungszentrum
Fachgruppe: Photogrammetrie & Fernerkundung
 Fachgruppe: Photogrammetrie & Fernerkundung mit ERDAS Martin Sauerbier Photogrammetrie & Fernerkundung, MFB-GeoConsulting Programm Fachgruppe Photogrammetrie und Fernerkundung 13.45 Begrüssung durch Michael
Fachgruppe: Photogrammetrie & Fernerkundung mit ERDAS Martin Sauerbier Photogrammetrie & Fernerkundung, MFB-GeoConsulting Programm Fachgruppe Photogrammetrie und Fernerkundung 13.45 Begrüssung durch Michael
Luftbildbefliegung mittels Unbemannten Flugsystem (UAS)
") Luftbildbefliegung mittels Unbemannten Flugsystem (UAS) Sebastian d Oleire-Oltmanns Die Inhalte dieser Präsentation (u.a. Texte, Grafiken, Fotos, Logos etc.) und die Präsentation selbst sind urheberrechtlich
Luftbildbefliegung mittels Unbemannten Flugsystem (UAS) Sebastian d Oleire-Oltmanns Die Inhalte dieser Präsentation (u.a. Texte, Grafiken, Fotos, Logos etc.) und die Präsentation selbst sind urheberrechtlich
Bildflug - Navigation - HS BO Lab. für Photogrammetrie: Navigation 1
 Bildflug - Navigation - HS BO Lab. für Photogrammetrie: Navigation 1 Zielsetzung Direkte Messung der Position und Orientierung des airborne Sensors Notwendige Sensorik: GPS, IMU Zeitstempel: Position/
Bildflug - Navigation - HS BO Lab. für Photogrammetrie: Navigation 1 Zielsetzung Direkte Messung der Position und Orientierung des airborne Sensors Notwendige Sensorik: GPS, IMU Zeitstempel: Position/
RIEGL VMX-250 Mobile Laser Scanning System am Beispiel der Paläste am Canal Grande, Venedig Hamburger Anwenderforum, Juni 2011
 RIEGL VMX-250 Mobile Laser Scanning System am Beispiel der Paläste am Canal Grande, Venedig Hamburger Anwenderforum, Juni 2011 Nikolaus STUDNICKA, Gerald ZACH, Phillipp AMON, Martin PFENNIGBAUER RIEGL
RIEGL VMX-250 Mobile Laser Scanning System am Beispiel der Paläste am Canal Grande, Venedig Hamburger Anwenderforum, Juni 2011 Nikolaus STUDNICKA, Gerald ZACH, Phillipp AMON, Martin PFENNIGBAUER RIEGL
Drohnen im Feuerwehreinsatz. Rechtsvorschriften
 Drohnen im Feuerwehreinsatz Rechtsvorschriften Begriffsdefinitionen Drohne Kopter Multikopter Umgangssprachliche Bezeichnung für alle ferngesteuerten Luftfahrzeuge / Luftfahrzeugsysteme Luftfahrzeug, das
Drohnen im Feuerwehreinsatz Rechtsvorschriften Begriffsdefinitionen Drohne Kopter Multikopter Umgangssprachliche Bezeichnung für alle ferngesteuerten Luftfahrzeuge / Luftfahrzeugsysteme Luftfahrzeug, das
Digitale Bildverarbeitung (DBV)
") Digitale Bildverarbeitung (DBV) Prof. Dr. Ing. Heinz Jürgen Przybilla Labor für Photogrammetrie Email: heinz juergen.przybilla@hs bochum.de Tel. 0234 32 10517 Sprechstunde: Montags 13 14 Uhr und nach Vereinbarung
Digitale Bildverarbeitung (DBV) Prof. Dr. Ing. Heinz Jürgen Przybilla Labor für Photogrammetrie Email: heinz juergen.przybilla@hs bochum.de Tel. 0234 32 10517 Sprechstunde: Montags 13 14 Uhr und nach Vereinbarung
Der Luftbildservice Sachsen. Matthias Kühl Tel.: (0351)
") Der Luftbildservice Sachsen Matthias Kühl Tel.: (0351) 8283 2100 email: Matthias.Kuehl@lvsn.smi.sachsen.de Gliederung Der Luftbildservice Sachsen - Einführung Die Produkte des Luftbildservice Luftbilder
Der Luftbildservice Sachsen Matthias Kühl Tel.: (0351) 8283 2100 email: Matthias.Kuehl@lvsn.smi.sachsen.de Gliederung Der Luftbildservice Sachsen - Einführung Die Produkte des Luftbildservice Luftbilder
Von der Killerdrohne zum Landschaftsauge. So geht die Welt in die Luft
 Von der Killerdrohne zum Landschaftsauge So geht die Welt in die Luft / Gebhard Merk ICT Vernetzungstag / 18.03.2017 Technik UAV Demo- Praxis - $ - Firmenportrait Familien-Unternehmung seit 1964 Gründung
Von der Killerdrohne zum Landschaftsauge So geht die Welt in die Luft / Gebhard Merk ICT Vernetzungstag / 18.03.2017 Technik UAV Demo- Praxis - $ - Firmenportrait Familien-Unternehmung seit 1964 Gründung
Einsatz unbemannter Flugobjekte. in der Forsteinrichtung
 Einsatz unbemannter Flugobjekte in der Forsteinrichtung Kai Jütte, Landesforst Mecklenburg-Vorpommern -Anstalt öffentlichen Rechts- Betriebsteil Forstliche Informationssysteme und Kartografie Zeppelinstraße
Einsatz unbemannter Flugobjekte in der Forsteinrichtung Kai Jütte, Landesforst Mecklenburg-Vorpommern -Anstalt öffentlichen Rechts- Betriebsteil Forstliche Informationssysteme und Kartografie Zeppelinstraße
DinoCapture2.0: BMP, GIF, PNG, MNG, TIF, TGA, PCX, WBMP, JP2, JPC, JPG, PGX, RAS, PNM DinoXcope: PNG, JPEG Movie Format:
 Dino-Lite Edge Serie USB Handmikroskop AM4515T5 1.3M, 1280x1024, 500x-550x Vergrößerung - AMR (Automatic Magnification Reading) - Stativ RK-10 empfehlenswert praktisch präzise preiswert auto-reading Model
Dino-Lite Edge Serie USB Handmikroskop AM4515T5 1.3M, 1280x1024, 500x-550x Vergrößerung - AMR (Automatic Magnification Reading) - Stativ RK-10 empfehlenswert praktisch präzise preiswert auto-reading Model
Dokumentation. Bestandsaufnahmen. Vorteile. und. Bestandsdokumentationen mit neuen Techniken
 und Dokumentation Bestandsaufnahmen Vorteile Bestandsdokumentationen mit neuen Techniken Überkopfwegweiser, Brückeninspektionen, Fahrbahnkontrolle, Inspektionen von Stützmauern, Kontrolle von Sicherungsmaßnahmen,
und Dokumentation Bestandsaufnahmen Vorteile Bestandsdokumentationen mit neuen Techniken Überkopfwegweiser, Brückeninspektionen, Fahrbahnkontrolle, Inspektionen von Stützmauern, Kontrolle von Sicherungsmaßnahmen,
Deformationsmessung mit Terrestrischem Laserscanning und Photogrammetrie. Martina Große-Schwiep, Heidi Hastedt und Thomas Luhmann
 Deformationsmessung mit Terrestrischem Laserscanning und Photogrammetrie Martina Große-Schwiep, Heidi Hastedt und Thomas Luhmann Inhalt Aufgabenstellung Messobjekt Motivation Photogrammetrische Aufnahme
Deformationsmessung mit Terrestrischem Laserscanning und Photogrammetrie Martina Große-Schwiep, Heidi Hastedt und Thomas Luhmann Inhalt Aufgabenstellung Messobjekt Motivation Photogrammetrische Aufnahme
Fachgruppe: Photogrammetrie & Fernerkundung
 Fachgruppe: Photogrammetrie & Fernerkundung mit ERDAS Martin Sauerbier Photogrammetrie & Fernerkundung, MFB-GeoConsulting Programm Fachgruppe Photogrammetrie und Fernerkundung 13.45 Begrüssung durch Michael
Fachgruppe: Photogrammetrie & Fernerkundung mit ERDAS Martin Sauerbier Photogrammetrie & Fernerkundung, MFB-GeoConsulting Programm Fachgruppe Photogrammetrie und Fernerkundung 13.45 Begrüssung durch Michael
Hannover, DGPF Projekttreffen. Datenübersicht DMC Flüge Vaihingen. Britta Bernecker, Silke Bihlmaier
 Hannover, 13.11.2008 DGPF Projekttreffen Datenübersicht DMC Flüge Vaihingen Britta Bernecker, Silke Bihlmaier Inhalt Missionsübersicht Block Missionsübersicht Radiometrie Bildformate und Datenmenge Grid
Hannover, 13.11.2008 DGPF Projekttreffen Datenübersicht DMC Flüge Vaihingen Britta Bernecker, Silke Bihlmaier Inhalt Missionsübersicht Block Missionsübersicht Radiometrie Bildformate und Datenmenge Grid
Qualitative Beurteilung photogrammetrischer Aufnahmekonstellationen im Nahbereich
 Qualitative Beurteilung photogrammetrischer Aufnahmekonstellationen im Nahbereich Karsten Raguse Manfred Wiggenhagen Inhalt Motivation Übersicht Optische Messkette Bestandteile der Messkette Simulation
Qualitative Beurteilung photogrammetrischer Aufnahmekonstellationen im Nahbereich Karsten Raguse Manfred Wiggenhagen Inhalt Motivation Übersicht Optische Messkette Bestandteile der Messkette Simulation
"Hybrid ist die Zukunft - das senkrecht startende und landende Starrflügel UAV SONGBIRD" Aerolution GmbH Berlin, Germany Dr.
 "Hybrid ist die Zukunft - das senkrecht startende und landende Starrflügel UAV SONGBIRD" Aerolution GmbH Berlin, Germany Dr. Hans-Peter Thamm Einführung Dr. Hans-Peter Thamm Physischer Geograph/ Hydrologe
"Hybrid ist die Zukunft - das senkrecht startende und landende Starrflügel UAV SONGBIRD" Aerolution GmbH Berlin, Germany Dr. Hans-Peter Thamm Einführung Dr. Hans-Peter Thamm Physischer Geograph/ Hydrologe
St. Mauritius Niederwenigern
 St. Mauritius Niederwenigern Bauaufnahme durch die Hochschule Bochum am 25. April 2013 St. Mauritius wird vermessen Was passiert denn hier? So oder ähnlich lauteten am 25. April 2013 die Fragen von interessierten
St. Mauritius Niederwenigern Bauaufnahme durch die Hochschule Bochum am 25. April 2013 St. Mauritius wird vermessen Was passiert denn hier? So oder ähnlich lauteten am 25. April 2013 die Fragen von interessierten
Aktuelles Leistungsvermögen flugzeuggestützter digitaler Kamerasysteme PG ATKIS -DOP
 Aktuelles Leistungsvermögen flugzeuggestützter digitaler Kamerasysteme PG ATKIS -DOP Aktuelles Leistungsvermögen flugzeuggestützter Zeitliche Entwicklung der digitalen Sensoren ADS40 UCD UCX DMCII -140-230
Aktuelles Leistungsvermögen flugzeuggestützter digitaler Kamerasysteme PG ATKIS -DOP Aktuelles Leistungsvermögen flugzeuggestützter Zeitliche Entwicklung der digitalen Sensoren ADS40 UCD UCX DMCII -140-230
Qualitativ: Hier geht es um die Inhalte wie z.b. die Landnutzung Quantitativ: Hierbei geht es um das Messen von Koordinaten
 Grundlagen der Photogrammetrie Die Photogrammetrie ist ein Verfahren zur Vermessung von Objekten nach Lage und Form. Dabei werden die Messungen nicht direkt am Objekt, sondern indirekt auf Bildern des
Grundlagen der Photogrammetrie Die Photogrammetrie ist ein Verfahren zur Vermessung von Objekten nach Lage und Form. Dabei werden die Messungen nicht direkt am Objekt, sondern indirekt auf Bildern des
Vermessung mit Drohne
 Vermessung mit Drohne 30.03.2017 Dataflor Aufmaßtag- Göttingen Dipl.-Ing. (FH) Ulrich Strecker Gliederung Vorstellung IBS Was liefert die Vermesserdrohne an Ergebnissen Photogrammetrie Was ist das? sonstige
Vermessung mit Drohne 30.03.2017 Dataflor Aufmaßtag- Göttingen Dipl.-Ing. (FH) Ulrich Strecker Gliederung Vorstellung IBS Was liefert die Vermesserdrohne an Ergebnissen Photogrammetrie Was ist das? sonstige
Holm Sieber <sieber@prudsys.de> Digitalfotografie und Linux
 Holm Sieber Digitalfotografie und Linux Agenda Teil 1 Kleine Fotoschule Technik der Digitalkamera Digitalkamera-Besonderheiten beim Fotografieren Marktübersicht und Kaufempfehlungen
Holm Sieber Digitalfotografie und Linux Agenda Teil 1 Kleine Fotoschule Technik der Digitalkamera Digitalkamera-Besonderheiten beim Fotografieren Marktübersicht und Kaufempfehlungen
Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo
 Geodäsie 4.0 - was erwartet uns Geodäten? Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo Xiaoguang Luo Leica Geosystems AG, Heerbrugg Seminar an der HFT Stuttgart,
Geodäsie 4.0 - was erwartet uns Geodäten? Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo Xiaoguang Luo Leica Geosystems AG, Heerbrugg Seminar an der HFT Stuttgart,
THE BIGPOWER OFSMALLPIXELS Erhöhung der Erkennbarkeit Erhöhung der Genauigkeit mit moderner Luftbildvermessung. Wolfgang Aleithe
 THE BIGPOWER OFSMALLPIXELS Erhöhung der Erkennbarkeit Erhöhung der Genauigkeit mit moderner Luftbildvermessung Wolfgang Aleithe GLÜCKAUF VERMESSUNG GMBH Kurzporträt Firmengründung: 01.10.1993 Firmensitz:
THE BIGPOWER OFSMALLPIXELS Erhöhung der Erkennbarkeit Erhöhung der Genauigkeit mit moderner Luftbildvermessung Wolfgang Aleithe GLÜCKAUF VERMESSUNG GMBH Kurzporträt Firmengründung: 01.10.1993 Firmensitz:
Thermografie per Drohne Ein Experiment in Arnsberg
 Thermografie per Drohne Ein Experiment in Arnsberg Dipl.-Ing. Sebastian Marcel Witte, Klimaschutzmanager Stadt Arnsberg Dipl.-Ing. Carsten Peters, Energieberater Arnsberg Die Idee Thermografie-Hauptstadt
Thermografie per Drohne Ein Experiment in Arnsberg Dipl.-Ing. Sebastian Marcel Witte, Klimaschutzmanager Stadt Arnsberg Dipl.-Ing. Carsten Peters, Energieberater Arnsberg Die Idee Thermografie-Hauptstadt
Fotogrundlagen BÖSCHEN FRANK. THEMA: F o t o. Hardwareinfo. G o e d d e r n @ G m x. d e. Datum : Seite : 1. Digitalkamera.
 Datum : Seite : 1 Digitalkamera Hardware Infos 20012 Digitalkamera Datum : Seite : 2 Eine Digitalkamera ist eine Kamera, die als Aufnahmemedium anstatt eines Films einen elektronischen Bildwandler (Bildsensor)
Datum : Seite : 1 Digitalkamera Hardware Infos 20012 Digitalkamera Datum : Seite : 2 Eine Digitalkamera ist eine Kamera, die als Aufnahmemedium anstatt eines Films einen elektronischen Bildwandler (Bildsensor)
Die chemische Kamera für Ihr Mikroskop
 Die chemische Kamera für Ihr Mikroskop» High Performance Hyper Spectral Imaging» Datenblatt Das HSI VIS/NIR Kamera-System ist ein integriertes Laborgerät für die kombinierte Farb- und chemische Analyse.
Die chemische Kamera für Ihr Mikroskop» High Performance Hyper Spectral Imaging» Datenblatt Das HSI VIS/NIR Kamera-System ist ein integriertes Laborgerät für die kombinierte Farb- und chemische Analyse.
Erhöhung der Messgenauigkeit von 3D-Lasertriangulation
 Erhöhung der Messgenauigkeit von 3D-Lasertriangulation Das Messprinzip von Laser-Triangulation Triangulationsgeometrie Beispiel Z Y X Messobjekt aus der Kamerasicht Sensorbild der Laserlinie 3D Laser-Triangulation
Erhöhung der Messgenauigkeit von 3D-Lasertriangulation Das Messprinzip von Laser-Triangulation Triangulationsgeometrie Beispiel Z Y X Messobjekt aus der Kamerasicht Sensorbild der Laserlinie 3D Laser-Triangulation
Quadrocopters and it s Applications: Overview of State of the Art Techniques
 : Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
: Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
Integration von statischen, luft- und fahrzeuggestützten LiDAR-Aufnahmen zur hochgenauen Kartierung von Infrastrukturobjekten
 Integration von statischen, luft- und fahrzeuggestützten LiDAR-Aufnahmen zur hochgenauen Kartierung von Infrastrukturobjekten David Ulrich Helimap System AG Übersicht Helimap System AG Problematik Autobahnvermessung
Integration von statischen, luft- und fahrzeuggestützten LiDAR-Aufnahmen zur hochgenauen Kartierung von Infrastrukturobjekten David Ulrich Helimap System AG Übersicht Helimap System AG Problematik Autobahnvermessung
i3mainz TLS-Datenformat (i3sc) von Prof. Dr.-Ing. Fredie Kern
 von Prof. Dr.-Ing. Fredie Kern") i3mainz TLS-Datenformat (i3sc) von Prof. Dr.-Ing. Fredie Kern Hochschule Bochum 02.09.2008 LEHREINHEIT GEOINFORMATIK UND VERMESSUNG kern@geoinform.fh-mainz.de Struktur von TLS-Daten 4Byte/Pkt. 8Byte/Pkt.
i3mainz TLS-Datenformat (i3sc) von Prof. Dr.-Ing. Fredie Kern Hochschule Bochum 02.09.2008 LEHREINHEIT GEOINFORMATIK UND VERMESSUNG kern@geoinform.fh-mainz.de Struktur von TLS-Daten 4Byte/Pkt. 8Byte/Pkt.
Untersuchung und Modellierung des Rolling-Shutter-Effekts für photogrammetrische Einzel- und Mehrbildauswertungen
 Untersuchung und Modellierung des Rolling-Shutter-Effekts für photogrammetrische Einzel- und Mehrbildauswertungen 16. Oldenburger 3D-Tage 2017 Oldenburg, 2. Februar 2017 Robin Rofallski & Thomas Luhmann
Untersuchung und Modellierung des Rolling-Shutter-Effekts für photogrammetrische Einzel- und Mehrbildauswertungen 16. Oldenburger 3D-Tage 2017 Oldenburg, 2. Februar 2017 Robin Rofallski & Thomas Luhmann
Prof. Dr.-Ing. H.-J. Przybilla Photogrammetrie Vertiefung WS 2005/6
 rientierung Der Begriff der rientierung wird in der Photogrammetrie vielfach genutzt. Er beschreibt dabei die geometrischen Zusammenhänge im und um das Meßbild. - Innere rientierung - Äußere rientierung
rientierung Der Begriff der rientierung wird in der Photogrammetrie vielfach genutzt. Er beschreibt dabei die geometrischen Zusammenhänge im und um das Meßbild. - Innere rientierung - Äußere rientierung
DGPF Projekt: Evaluierung digitaler photogrammetrischer Luftbildkamerasysteme Themenschwerpunkt Höhenmodelle
 Dreiländertagung Wien DGPF Projekt: Evaluierung digitaler photogrammetrischer Luftbildkamerasysteme Themenschwerpunkt Höhenmodelle 3-Ländertagung DGPF - OVG - SGPBF 1. Juli 2010 Technische Universität
Dreiländertagung Wien DGPF Projekt: Evaluierung digitaler photogrammetrischer Luftbildkamerasysteme Themenschwerpunkt Höhenmodelle 3-Ländertagung DGPF - OVG - SGPBF 1. Juli 2010 Technische Universität
10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart
 10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart M.Eng. Marius Ziegler Projektleiter: Prof. Dr. M. Hahn 07. November 2014 Mobile Mapping Kernelemente Messgeräte zur Positionsbestimmung
10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart M.Eng. Marius Ziegler Projektleiter: Prof. Dr. M. Hahn 07. November 2014 Mobile Mapping Kernelemente Messgeräte zur Positionsbestimmung