Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo
|
|
|
- Hella Gerstle
- vor 6 Jahren
- Abrufe
Transkript

1 Geodäsie was erwartet uns Geodäten? Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo Xiaoguang Luo Leica Geosystems AG, Heerbrugg Seminar an der HFT Stuttgart, 27. Juli 2017






2 Leica Geosystems Mehr als 90 Jahre Innovation millions millions 100 millions 10 millions 1 million 2

 Hohe Genauigkeit (3D: 3 mm bei")
 Realitätstreue Darstellung von")
3 High Definition Surveying ScanStation P40 Fotoaufnahme Schnelle Datenerfassung (1 Mio. Pkt./s) Hohe Genauigkeit (3D: 3 mm bei 50 m) Große Reichweite (bis zu 270 m) Realitätstreue Darstellung von Objekten 3D-Modell 3

4 4 Hochdetaillierte, farbige 3D-Punktwolke (Venedig, Italien)








5 Miniaturisierung BLK360 Kamera 1 Kamera 2 Ein-Tasten-Bedienung Kamera 3 Thermalkamera 1 kg, 10 cm x 16.5 cm, kabellos Reichweite bis zu 60 m 360,000 Punkte / Sekunde Weniger als 3 Minuten für einen Scan mit vollem Sichtfeld 5 Live Bild- und Scandatenübertragung

6 6


![[Thermalsensor] Leica P20 bis](/docs-images/72/66656563/images/7-3.jpg "zu 120 km/h Scanner")
![[Radarsystem] Multi-Frequenz](/docs-images/72/66656563/images/7-4.jpg "Genauigkeit: 2-3 cm GNSS")
7 Mobile Mapping Pegasus:Two Pegasus:Two Einsatz im Außenbereich Fahrzeuggeschwindigkeit [Thermalsensor] Leica P20 bis zu 120 km/h Scanner [Radarsystem] Multi-Frequenz Genauigkeit: 2-3 cm GNSS Kamerasystem Inertiale Messeinheit (IMU) 7
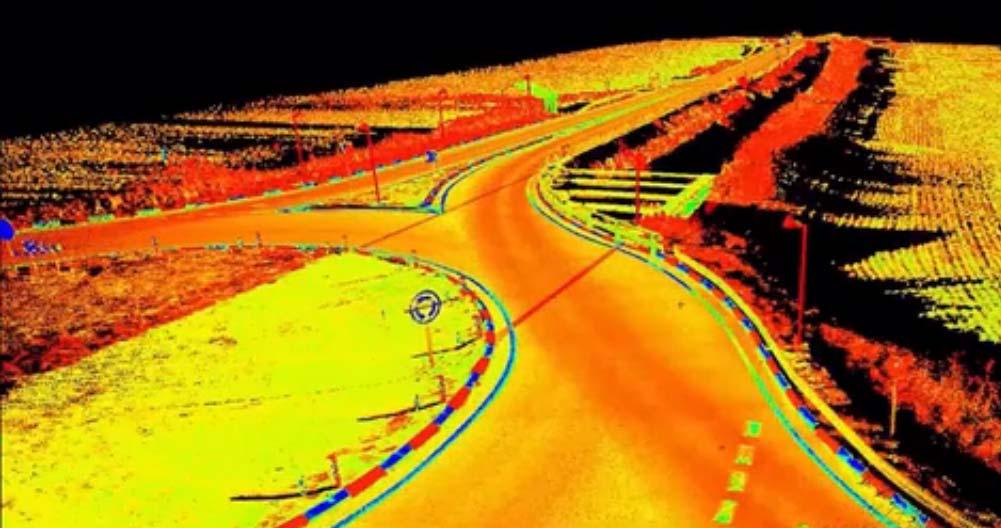
8 8 Oberflächenmodellierung



9 Mobile Mapping Pegasus:Backpack Multi-Frequenz GNSS Pegasus:Backpack Einsatz im Innen- und Außenbereich Schrittgeschwindigkeit Genauigkeit: 5 cm 50 cm Dual-Scanner Kamerasystem [Externes Licht] [Thermalkamera] 200-Hz IMU 11.9 kg mit Batterien 9

10 10 3D-Punktwolke mit Pegasus:Backpack

11 UAV Aibot X6 Barometer GPS-Empfänger Einfache und effiziente Datenerfassung aus der Luft für Inspektionen, Planung und Kartierung Gyroskop Leergewicht: 3.4 kg Maximale Zuladung: 2 kg Maximale Geschwindigkeit: 40 km/h Flughöhe: Bis zu 1000 m über Gelände Automatischer Wegpunktflug Magnetometer Beschleunigungssensor Digitalkamera / Thermalsensor / Hyper- und Multispektralsensor 11


12 12


13 13


14 14

 RTKplus: Multi-Konstellation- und Multi-Frequenz- RTK mit intelligenten Algorithmen")
15 Selbstlernende Messtechnik MS60 & GS16 MultiStation MS60 Automatische Anpassung an Messbedingungen Scanning: Schnelle 3D-Datenerfassung Totalstation: Hochgenaue Punktabsteckung Verbesserte Zielerfassung durch die neue Dynamic-Lock-Funktion GNSS SmartAntenna GS16 Automatische Anpassung an Messbedingungen SmartLink: Precise Point Positioning (PPP) RTKplus: Multi-Konstellation- und Multi-Frequenz- RTK mit intelligenten Algorithmen 15
16 Galileo-Konstellation Occupied slots (SV usable) Extended slots (SV testing) Target slots (SV under commissioning) SV 20 not available Right ascension of ascending node Besetzungsstatus der Galileo-Satellitenslots (26. Juli, 2017, Quelle: ESA) 16
17 Galileo-Integration in Leica Viva GNSS Galileo-Integration in SmartWorx v6.16 Verwenden Galileo standardmäßig für RTK-Positionierung (Navigation, DGNSS, xrtk, RTK) Unterstützen Galileo in den Korrekturdatenformaten RTCM v3 MSM und Leica 4G Unterstützen Galileo in Single-Base-RTK und Netzwerk-RTK mit imax und VRS Galileo-Integration in RTK-Algorithmen Nutzen alle Galileo-Signale in E1- und E5-Band (E1, E5a, E5b, AltBOC) Nutzen Multi-Frequenz-Linearkombinationen 17


18 Multi-GNSS RTK Aufbau Starke Mehrwegebelastung durch die umstehenden Gebäude Blick von AS10 Süden GNSS-Sensor: GS16 GNSS: GPS+GLO+GAL+BDS Elevationsmaske: 10 RTK-Datenformat: RTCM v3 MSM Blick von Norden GS16 RTK-Netzwerktyp: VRS Physikalische Basislinienlänge: 0.2 km 3 Stunden 1-Hz GNSS-Daten 18
19 Multi-GNSS RTK Genauigkeit GGB: GPS+GLO+BDS GGGB: GPS+GLO+GAL+BDS cm-verbesserungen durch 3 Galileo-Satelliten dm-verbesserungen durch 2 Galileo-Satelliten 19
20 Multi-GNSS RTK Genauigkeit & Zuverlässigkeit RMS-Fehler von RTK-Fix-Positionen in m 85% 3D 2D 1D GGB % GGGB Verbesserung 56.3% 42.9% 58.7% Zuverlässigkeit von RTK-Fix-Positionen in % 3D-Fehler 5 cm 3D 2D 1D GGB GGGB Verbesserung

21 Multi-GNSS RTK Time to fix (TTF) 87% IQR: interquartile range 71% 46% 17% TTF 10 s IQR: 4 s Med: 8 s Med: 6 s IQR: 2 s TTF 5 s 765 TTF-Werte 1128 TTF-Werte 21

22 Galileo only RTK Aufbau Open sky -Bedingungen GNSS-Sensor: 2 GS10+2 AR25 GNSS: GPS+GLO+GAL+BDS Elevationsmaske: 0 RTK-Datenformat: RTCM v3 MSM Single-Base-RTK Basislinienlänge: 1 m AR25 Base AR25 Rover 1 Stunde 1-Hz GNSS-Daten RTK-Korrekturen in RTCM v3 MSM 22
23 Galileo only RTK Genauigkeit 23

24 Galileo only RTK Genauigkeit 24

25 25 Mehr Informationen sind in der August- Ausgabe der Zeitschrift GPS World zu finden.
26 Zusammenfassung Entwicklung der Messtechnik bei Leica Geosystems Kombination von Sensoren und Messverfahren Schnellere, genauere und effizientere 3D-Datenerfassung im Außen- und Innenbereich (statisch & kinematisch) Totalstation und GNSS noch unersetzbar insb. für Absteckungsaufgaben Hochpräzise RTK-Positionierung mittels Galileo Signifikante Verbesserungen unter schwierigen Bedingungen Vergleichbare 3D-Genauigkeit zw. GPS-only- und Galilleo-only-RTK Herausforderungen an uns Geodäten Breites Wissen in Sensorfusion, Computer Vision, Bildverarbeitung, usw. Innovative Nutzung der erfassten Geoinformationen 26


27 Vielen Dank für Ihre Aufmerksamkeit! 27
GNSS Empfänger in einem dynamischen Geschäftsumfeld
 GNSS Empfänger in einem dynamischen Geschäftsumfeld Bernhard Richter, GNSS Programmdirektor, Leica Geosystems AG 19. Jänner 2017 Teil von Glonass 30 25 Number of GNSS satellites 20 15 10 GLONASS 5 0 Vollausbau
GNSS Empfänger in einem dynamischen Geschäftsumfeld Bernhard Richter, GNSS Programmdirektor, Leica Geosystems AG 19. Jänner 2017 Teil von Glonass 30 25 Number of GNSS satellites 20 15 10 GLONASS 5 0 Vollausbau
GNSS Empfänger in der Vermessung und der Nutzen von GNSS Modernisierung
 GNSS Empfänger in der Vermessung und der Nutzen von GNSS Modernisierung Bernhard Richter, GNSS Business Direktor 11, Oktober 2016 Teil von GNSS Modernisierung seit 1990 Erst jetzt zeigt BeiDou und Galileo
GNSS Empfänger in der Vermessung und der Nutzen von GNSS Modernisierung Bernhard Richter, GNSS Business Direktor 11, Oktober 2016 Teil von GNSS Modernisierung seit 1990 Erst jetzt zeigt BeiDou und Galileo
Fortschritte bei den GNSS- Positionierungstechnologien für die Landwirtschaft
 Geodätische Grundlagen und Positionierung Fortschritte bei den GNSS- Positionierungstechnologien für die Landwirtschaft 5. Nationale Ackerbautagung 30. Januar 2018, Murten U. Wild 1 Agenda Einleitung GNSS
Geodätische Grundlagen und Positionierung Fortschritte bei den GNSS- Positionierungstechnologien für die Landwirtschaft 5. Nationale Ackerbautagung 30. Januar 2018, Murten U. Wild 1 Agenda Einleitung GNSS
Aktuelle Trends in der satellitengestützten Positionierung
 GEOMATIK News 2014 Aktuelle Trends in der satellitengestützten Positionierung B. Richter, Business Director GNSS Leica Geosystems AG, Schweiz 12. November 2014 Inhalt 1. GPS Modernisierung 2. GLONASS Modernisierung
GEOMATIK News 2014 Aktuelle Trends in der satellitengestützten Positionierung B. Richter, Business Director GNSS Leica Geosystems AG, Schweiz 12. November 2014 Inhalt 1. GPS Modernisierung 2. GLONASS Modernisierung
Moderne Vermessungsinstrumente: Von Richtungs- und Distanzmessern zu perfekten Koordinatenmessmaschinen? Johannes Schwarz Leica Geosystems
 Moderne Vermessungsinstrumente: Von Richtungs- und Distanzmessern zu perfekten Koordinatenmessmaschinen? Johannes Schwarz Leica Geosystems 16.11.2017 Vermessung zu meinen Kindheitszeiten. 2 «Alles messen»
Moderne Vermessungsinstrumente: Von Richtungs- und Distanzmessern zu perfekten Koordinatenmessmaschinen? Johannes Schwarz Leica Geosystems 16.11.2017 Vermessung zu meinen Kindheitszeiten. 2 «Alles messen»
GPS - Aktueller Stand und künftige Potentiale
 armasuisse Bundesamt für Landestopografie swisstopo Bereich GPS - Aktueller Stand und künftige Potentiale Informationstagung Landtechnik 2009 13. Oktober 2009, Tänikon U. Wild Agenda Satellitensysteme
armasuisse Bundesamt für Landestopografie swisstopo Bereich GPS - Aktueller Stand und künftige Potentiale Informationstagung Landtechnik 2009 13. Oktober 2009, Tänikon U. Wild Agenda Satellitensysteme
Leica Geosystems - when it has to be right. Vito Schlegel, KeyShot World 21.April 2015, Stuttgart
 Leica Geosystems - when it has to be right Vito Schlegel, KeyShot World 21.April 2015, Stuttgart Vito Schlegel, Technischer Illustrator Leica Geosystems AG, CH-9435 Heerbrugg Seit November 2011 bei Leica
Leica Geosystems - when it has to be right Vito Schlegel, KeyShot World 21.April 2015, Stuttgart Vito Schlegel, Technischer Illustrator Leica Geosystems AG, CH-9435 Heerbrugg Seit November 2011 bei Leica
10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart
 10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart M.Eng. Marius Ziegler Projektleiter: Prof. Dr. M. Hahn 07. November 2014 Mobile Mapping Kernelemente Messgeräte zur Positionsbestimmung
10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart M.Eng. Marius Ziegler Projektleiter: Prof. Dr. M. Hahn 07. November 2014 Mobile Mapping Kernelemente Messgeräte zur Positionsbestimmung
Aktuelle Entwicklungen in der satellitengestützten Positionierung GNSS - RTCM - RTK. Dr. Werner Lienhart
 Aktuelle Entwicklungen in der satellitengestützten Positionierung GNSS - RTCM - RTK Dr. Werner Lienhart Inhalt Aktueller Stand von GNSS RTCM - derzeitige und kommende Messages SmartRTK - Leica s neuer
Aktuelle Entwicklungen in der satellitengestützten Positionierung GNSS - RTCM - RTK Dr. Werner Lienhart Inhalt Aktueller Stand von GNSS RTCM - derzeitige und kommende Messages SmartRTK - Leica s neuer
Kooperative Positionierung von Verkehrsteilnehmern auf Basis von GNSS, LiDaRund IEEE p. 14. VIMOS-Symposium November 2018, Dresden
 Kooperative Positionierung von Verkehrsteilnehmern auf Basis von GNSS, LiDaRund IEEE 802.11p 14. VIMOS-Symposium 29. - 30. November 2018, Dresden Agenda 1. Motivation 2. Kooperative Positionierung 3. Positionierung
Kooperative Positionierung von Verkehrsteilnehmern auf Basis von GNSS, LiDaRund IEEE 802.11p 14. VIMOS-Symposium 29. - 30. November 2018, Dresden Agenda 1. Motivation 2. Kooperative Positionierung 3. Positionierung
Global Navigation meets Geoinformation April ESA/ESOC, Darmstadt
 28. April ESA/ESOC, Darmstadt Datenerfassung mit UAVs in Ergänzung der Fernerkundung für eine digitalisierte Welt Lothar Assenmacher, Aibotix GmbH, Kassel 1 Agenda Firmenprofil Allgemeine Grundlagen Aibot
28. April ESA/ESOC, Darmstadt Datenerfassung mit UAVs in Ergänzung der Fernerkundung für eine digitalisierte Welt Lothar Assenmacher, Aibotix GmbH, Kassel 1 Agenda Firmenprofil Allgemeine Grundlagen Aibot
GNSS in Geodäsie und Navigation
 GNSS in Geodäsie und Navigation Anwendungen und Beispiele aus dem Institut für Physikalische Geodäsie (IPGD) Stefan Leinen und Matthias Becker Hessische Auftakt-Veranstaltung European Satellite Navigation
GNSS in Geodäsie und Navigation Anwendungen und Beispiele aus dem Institut für Physikalische Geodäsie (IPGD) Stefan Leinen und Matthias Becker Hessische Auftakt-Veranstaltung European Satellite Navigation
GNSS-Positionierung auf offener See
 FAMOS 2 nd Phase GNSS-Positionierung auf offener See Kerstin Binder, Gunter Liebsch, Axel Rülke Bundesamt für Kartographie und Geodäsie Frankfurt am Main und Leipzig Gliederung 1. Positionierungskonzepte
FAMOS 2 nd Phase GNSS-Positionierung auf offener See Kerstin Binder, Gunter Liebsch, Axel Rülke Bundesamt für Kartographie und Geodäsie Frankfurt am Main und Leipzig Gliederung 1. Positionierungskonzepte
Trajektorienbestimmung im Skisprung
 Dipl.-Ing. Petra Hafner Steyrergasse 30, 8010 Graz Trajektorienbestimmung im Skisprung P. Hafner M. Wieser N. Kühtreiber B. Wiesenhofer C. Abart B. Hofmann-Wellenhof (INAS) T. Nunner G. Paar (Joanneum
Dipl.-Ing. Petra Hafner Steyrergasse 30, 8010 Graz Trajektorienbestimmung im Skisprung P. Hafner M. Wieser N. Kühtreiber B. Wiesenhofer C. Abart B. Hofmann-Wellenhof (INAS) T. Nunner G. Paar (Joanneum
Korrektursignale. Differential GPS (DGPS) erreicht durch den Einsatz von Korrektursignalen eine höhere Genauigkeit.
 erreicht durch den Einsatz von Korrektursignalen eine höhere Genauigkeit.") GPS-Genauigkeit: Herkömmliche GPS-Daten ermöglichen eine Genauigkeit von +/- 10 Metern àdas ist für landwirtschaftliche Arbeiten nicht genau genug! Ionosphäre 200 km Troposphäre 50 km Differential GPS
GPS-Genauigkeit: Herkömmliche GPS-Daten ermöglichen eine Genauigkeit von +/- 10 Metern àdas ist für landwirtschaftliche Arbeiten nicht genau genug! Ionosphäre 200 km Troposphäre 50 km Differential GPS
3D Mobile Mapping. Wir bringen die Realität ins Büro
 3D Mobile Mapping Wir bringen die Realität ins Büro Inhalt Vorstellung GRUNDER INGENIEURE AG Weshalb Mobile Mapping Vorstellung Mobile Mapping und LEICA PEGASUS TWO Datenerhebung Varianten von LEICA PEGASUS
3D Mobile Mapping Wir bringen die Realität ins Büro Inhalt Vorstellung GRUNDER INGENIEURE AG Weshalb Mobile Mapping Vorstellung Mobile Mapping und LEICA PEGASUS TWO Datenerhebung Varianten von LEICA PEGASUS
3. Hamburger Anwenderforum Terrestrisches Laserscanning 2009, 16. Juni 2009
 Institute for Photogrammetry and GeoInformation Leibniz University Hannover 3. er Anwenderforum Terrestrisches Laserscanning 2009, 16. Juni 2009 Dokumentation der historischen Halbinsel von Istanbul durch
Institute for Photogrammetry and GeoInformation Leibniz University Hannover 3. er Anwenderforum Terrestrisches Laserscanning 2009, 16. Juni 2009 Dokumentation der historischen Halbinsel von Istanbul durch
Leica Viva TS15 Die schnellste Totalstation mit Bildverarbeitung
 Leica Viva TS15 Die schnellste Totalstation mit Bildverarbeitung Ihr Anspruch: Einfaches Arbeiten mit Erleben Sie Leica Viva TS15 Alles auf einen Blick Mit Leica Viva TS15 und der Bild- Verarbeitung erledigen
Leica Viva TS15 Die schnellste Totalstation mit Bildverarbeitung Ihr Anspruch: Einfaches Arbeiten mit Erleben Sie Leica Viva TS15 Alles auf einen Blick Mit Leica Viva TS15 und der Bild- Verarbeitung erledigen
Quadrocopters and it s Applications: Overview of State of the Art Techniques
 : Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
: Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
Warnemünde im April 2008 Andreas Hermanowski Sales Positioning Systems. 4.GeoForum MV 2008
 Warnemünde im April 2008 Andreas Hermanowski Sales Positioning Systems 4.GeoForum MV 2008 TOPCON Corporation Das japanisch, multi-nationale Unternehmen ist weltweit führend in der Herstellung und dem Vertrieb
Warnemünde im April 2008 Andreas Hermanowski Sales Positioning Systems 4.GeoForum MV 2008 TOPCON Corporation Das japanisch, multi-nationale Unternehmen ist weltweit führend in der Herstellung und dem Vertrieb
gps100/speed Technische Spezifikationen
 gps100/speed Technische Spezifikationen Stand: 07/018 100Hz Dual GPS D IMU CAN FD/.0 Analog Digital Der gps100/speed ist die konsequente Weiterentwicklung und Umsetzung der gps100-technologie. In einem
gps100/speed Technische Spezifikationen Stand: 07/018 100Hz Dual GPS D IMU CAN FD/.0 Analog Digital Der gps100/speed ist die konsequente Weiterentwicklung und Umsetzung der gps100-technologie. In einem
Galileo Herausforderung und Gewinn für die geodätische Anwendung
 Galileo Herausforderung und Gewinn für die geodätische Anwendung Urs Hugentobler Forschungseinrichtung Satellitengeodäsie und Geodätische Geodäsie Technische Universität München, 13. November 007 und Physikalische
Galileo Herausforderung und Gewinn für die geodätische Anwendung Urs Hugentobler Forschungseinrichtung Satellitengeodäsie und Geodätische Geodäsie Technische Universität München, 13. November 007 und Physikalische
Mobile Mapping - Schnell und flexibel zur Punktwolke und zum 3D Modell
 Mobile Mapping - Schnell und flexibel zur Punktwolke und zum 3D Modell 10. Vermessungsingenieurtag 3. Geodätentag der HFT Stuttgart Prof. Dr. Michael Hahn, HFT Stuttgart 1 Übersicht Green Mobile Mapping
Mobile Mapping - Schnell und flexibel zur Punktwolke und zum 3D Modell 10. Vermessungsingenieurtag 3. Geodätentag der HFT Stuttgart Prof. Dr. Michael Hahn, HFT Stuttgart 1 Übersicht Green Mobile Mapping
Zur Georeferenzierung von UAV Bildflügen: direkt oder indirekt, was braucht man dafür? Lasse Klingbeil Christian Eling Heiner Kuhlmann
 Zur Georeferenzierung von UAV Bildflügen: direkt oder indirekt, was braucht man dafür? Lasse Klingbeil Christian Eling Heiner Kuhlmann Institut für Geodäsie und Geoinformation Rheinische Friedrich-Wilhelms-Universität
Zur Georeferenzierung von UAV Bildflügen: direkt oder indirekt, was braucht man dafür? Lasse Klingbeil Christian Eling Heiner Kuhlmann Institut für Geodäsie und Geoinformation Rheinische Friedrich-Wilhelms-Universität
Neue Entwicklungen in der GNSS Technik
 Neue Entwicklungen in der GNSS Technik SONDIERUNG VERMESSUNG ABSTECKUNG ili gis-services Hersteller-unabhängiges Ingenieurbüro seit über 15 Jahren Maßgeschneiderte Hard- und Softwarekombinationen namhafter
Neue Entwicklungen in der GNSS Technik SONDIERUNG VERMESSUNG ABSTECKUNG ili gis-services Hersteller-unabhängiges Ingenieurbüro seit über 15 Jahren Maßgeschneiderte Hard- und Softwarekombinationen namhafter
Hocheffiziente Bestandsdatenerfassung durch portables Laserscanning
 Hocheffiziente Bestandsdatenerfassung durch portables Laserscanning Dr. Christian Hesse, dhp:i www.dhpi.com 4. Hamburger Anwenderforum TLS 1 Dr. Hesse und Partner Ingenieure Hamburg / Buxtehude 25+ Mitarbeiter
Hocheffiziente Bestandsdatenerfassung durch portables Laserscanning Dr. Christian Hesse, dhp:i www.dhpi.com 4. Hamburger Anwenderforum TLS 1 Dr. Hesse und Partner Ingenieure Hamburg / Buxtehude 25+ Mitarbeiter
Leica Nova MS50 MultiStation
 Leica Nova MS5 MultiStation Schnelle, leise Piezo-Triebe, Touch Screen, etc. Direkter GNSS Anschluss 2 Kameras Fernsteuerung 3D Onboard Scanning 1 3. Jan. 214 W.Hardegen Leica Nova MS5 MultiStation WFD
Leica Nova MS5 MultiStation Schnelle, leise Piezo-Triebe, Touch Screen, etc. Direkter GNSS Anschluss 2 Kameras Fernsteuerung 3D Onboard Scanning 1 3. Jan. 214 W.Hardegen Leica Nova MS5 MultiStation WFD
POMAR 3D. Positionierung und Orientierung Clients. Dipl.-Ing. Elise Taichmann. NAVIGATIONS-GET-TOGETHER 20. Oktober 2009, Graz
 POMAR 3D Positionierung und Orientierung eines Augmented-Reality Clients Dipl.-Ing. Elise Taichmann 20. Oktober 2009, Graz Inhalt 1. Das Projekt 2. Die Anwendung 3. Herausforderungen 4. Umsetzung 5. Beispiele
POMAR 3D Positionierung und Orientierung eines Augmented-Reality Clients Dipl.-Ing. Elise Taichmann 20. Oktober 2009, Graz Inhalt 1. Das Projekt 2. Die Anwendung 3. Herausforderungen 4. Umsetzung 5. Beispiele
Leica SmartWorx Viva Release Notes v6.00
 Leica SmartWorx Viva v6.0x Software Release Notes Produkt Datum 25 Juli 2016 Maintenance 01 Juni 2016 Leica SmartWorx Viva Feld Controller: CS10, CS15 Total Stationen: TS11, TS12L, TS15, TM50, TS50, MS50
Leica SmartWorx Viva v6.0x Software Release Notes Produkt Datum 25 Juli 2016 Maintenance 01 Juni 2016 Leica SmartWorx Viva Feld Controller: CS10, CS15 Total Stationen: TS11, TS12L, TS15, TM50, TS50, MS50
Der Einfluss neuer Technologien in Totalstationen auf klassische Vermessungsabläufe. Dr. Werner Lienhart, TPS Produktmanagement
 A B Der Einfluss neuer Technologien in Totalstationen auf klassische Vermessungsabläufe Dr. Werner Lienhart, TPS Produktmanagement 1968 (1963) Elektronische Distanzmessung zu Reflektoren wird verfügbar
A B Der Einfluss neuer Technologien in Totalstationen auf klassische Vermessungsabläufe Dr. Werner Lienhart, TPS Produktmanagement 1968 (1963) Elektronische Distanzmessung zu Reflektoren wird verfügbar
Ist Collaborative Positioning eine geeignete Lösung bei GNSS Beeinträchtigungen?
 Symposium St. Ulrich bei Steyr Ist Collaborative Positioning eine geeignete Lösung bei GNSS Beeinträchtigungen? Guenther Retscher Department Geodäsie und Geoinformation, FG Ingenieurgeodäsie Technische
Symposium St. Ulrich bei Steyr Ist Collaborative Positioning eine geeignete Lösung bei GNSS Beeinträchtigungen? Guenther Retscher Department Geodäsie und Geoinformation, FG Ingenieurgeodäsie Technische
AICON 3D Arena Optische Trackingtechnologie für große Messvolumina. Kurt Sinnreich
 AICON 3D Arena Optische Trackingtechnologie für große Messvolumina Kurt Sinnreich Vorsprung ist messbar Eine effiziente und hochgenaue Produktionsüberwachung, Qualitätssicherung und -kontrolle sowie zuverlässiges
AICON 3D Arena Optische Trackingtechnologie für große Messvolumina Kurt Sinnreich Vorsprung ist messbar Eine effiziente und hochgenaue Produktionsüberwachung, Qualitätssicherung und -kontrolle sowie zuverlässiges
Navigationslösungen mit GNSS und Multisensorsystemen
 Navigationslösungen mit GNSS und Multisensorsystemen Teil 1 GNSS Angebot für den Bereich Sensorik Dipl. Ing. Björn Rapelius Teil 2 GNSS - Kopplung IMU Dipl. Ing. Julia Hemmert Definition von GNSS (Global
Navigationslösungen mit GNSS und Multisensorsystemen Teil 1 GNSS Angebot für den Bereich Sensorik Dipl. Ing. Björn Rapelius Teil 2 GNSS - Kopplung IMU Dipl. Ing. Julia Hemmert Definition von GNSS (Global
Neue Möglichkeiten mit GPS, GLONASS, Galileo. Dipl.-Ing. Jürgen Alberding EuroNav Service GmbH Lilienthalstr. 3B Schönefeld (b.
 Neue Möglichkeiten mit GPS, GLONASS, Galileo Dipl.-Ing. Jürgen Alberding EuroNav Service GmbH Lilienthalstr. 3B 12529 Schönefeld (b. Berlin) Überblick GPS und dessen Weiterentwicklung GLONASS Ausbaustand
Neue Möglichkeiten mit GPS, GLONASS, Galileo Dipl.-Ing. Jürgen Alberding EuroNav Service GmbH Lilienthalstr. 3B 12529 Schönefeld (b. Berlin) Überblick GPS und dessen Weiterentwicklung GLONASS Ausbaustand
SmartNet Germany Einstellungen zur Nutzung mit System 1200
 SmartNet Germany Einstellungen zur Nutzung mit System 1200 Inhalt: Mit den Leica GNSS Instrumenten der Serien GPS500, GPS1200 und Viva GNSS können Korrekturdaten von Referenzstationsnetzen zur präzisen
SmartNet Germany Einstellungen zur Nutzung mit System 1200 Inhalt: Mit den Leica GNSS Instrumenten der Serien GPS500, GPS1200 und Viva GNSS können Korrekturdaten von Referenzstationsnetzen zur präzisen
Leica ScanStation C10 Der kompakte Laserscanner für alle Anwendungen
 Leica ScanStation C10 Der kompakte Laserscanner für alle Anwendungen Leica ScanStation C10 Vielseitigkeit, Produktivität und Mehrwert Die Leica ScanStation C10 bietet Ihnen die nötige Vielseitigkeit bei
Leica ScanStation C10 Der kompakte Laserscanner für alle Anwendungen Leica ScanStation C10 Vielseitigkeit, Produktivität und Mehrwert Die Leica ScanStation C10 bietet Ihnen die nötige Vielseitigkeit bei
Ist Ihre GPS Messung immer punktgenau?
 Ist Ihre GPS Messung immer punktgenau? Korrekturdaten im neuen Format RTCM 3.1. Als Anwender von GNSS-Referenzstationsdiensten erwarten Sie gleichmäßige Genauigkeit über das gesamte Netzwerkgebiet. Virtuell
Ist Ihre GPS Messung immer punktgenau? Korrekturdaten im neuen Format RTCM 3.1. Als Anwender von GNSS-Referenzstationsdiensten erwarten Sie gleichmäßige Genauigkeit über das gesamte Netzwerkgebiet. Virtuell
Capturing the World in 3D. p3dsystems
 24.07.2014 1 Bahntrassee Flexibilität Tunnel Genauigkeit Fabrikhalle Produktivität Fabrikationsgebäude Effizienz "Kinematisches Laser Scanning: Anwendungen aus der Praxis" 24.07.2014 2 Kinematisches Laser
24.07.2014 1 Bahntrassee Flexibilität Tunnel Genauigkeit Fabrikhalle Produktivität Fabrikationsgebäude Effizienz "Kinematisches Laser Scanning: Anwendungen aus der Praxis" 24.07.2014 2 Kinematisches Laser
Präzise Einfrequenz-Positionierung mit dem Galileo E5 Breitbandsignal
 Präzise Einfrequenz-Positionierung mit dem Galileo E5 Breitbandsignal Geodätische Woche 2011 / InterGEO Nürnberg 28. September 2011 Ing. habil. Torben Schüler Stefan Junker Herman Diessongo Prof. Dr.-Ing.
Präzise Einfrequenz-Positionierung mit dem Galileo E5 Breitbandsignal Geodätische Woche 2011 / InterGEO Nürnberg 28. September 2011 Ing. habil. Torben Schüler Stefan Junker Herman Diessongo Prof. Dr.-Ing.
FACHFORUM VoGIS. Übers GPS ins GIS. Eine attraktive Möglichkeit zur GIS-Datenerfassung
 FACHFORUM VoGIS Übers GPS ins GIS? Eine attraktive Möglichkeit zur GIS-Datenerfassung FACHFORUM VoGIS Übers GPS ins GIS Eine attraktive Möglichkeit zur GIS-Datenerfassung? Leica GS20 DI Michael ALLESCH,
FACHFORUM VoGIS Übers GPS ins GIS? Eine attraktive Möglichkeit zur GIS-Datenerfassung FACHFORUM VoGIS Übers GPS ins GIS Eine attraktive Möglichkeit zur GIS-Datenerfassung? Leica GS20 DI Michael ALLESCH,
Stabile GNSS Uhren für Bahnbestimmung und Positionierung
 Stabile GNSS Uhren für Bahnbestimmung und Positionierung Geodätische Woche 2015 1 Gliederung 1. Motivation 2. Simulationen 2.1 Ablaufschema 2.2 Prozessierung 3. Simulationsergebnisse 3.1 Bahnfehler 3.2
Stabile GNSS Uhren für Bahnbestimmung und Positionierung Geodätische Woche 2015 1 Gliederung 1. Motivation 2. Simulationen 2.1 Ablaufschema 2.2 Prozessierung 3. Simulationsergebnisse 3.1 Bahnfehler 3.2
RIEGL VMX-250 Mobile Laser Scanning System am Beispiel der Paläste am Canal Grande, Venedig Hamburger Anwenderforum, Juni 2011
 RIEGL VMX-250 Mobile Laser Scanning System am Beispiel der Paläste am Canal Grande, Venedig Hamburger Anwenderforum, Juni 2011 Nikolaus STUDNICKA, Gerald ZACH, Phillipp AMON, Martin PFENNIGBAUER RIEGL
RIEGL VMX-250 Mobile Laser Scanning System am Beispiel der Paläste am Canal Grande, Venedig Hamburger Anwenderforum, Juni 2011 Nikolaus STUDNICKA, Gerald ZACH, Phillipp AMON, Martin PFENNIGBAUER RIEGL
Nutzen von Drohnendaten
 Nutzen von Drohnendaten Nutzen von Drohnendaten Die allnav ag ist kompletter Lösungsanbieter im Bereich UAS Jürg Pulfer Applikationsingenieur MEB Group allnav als wichtiger Bestandteil der MEB Group Experten
Nutzen von Drohnendaten Nutzen von Drohnendaten Die allnav ag ist kompletter Lösungsanbieter im Bereich UAS Jürg Pulfer Applikationsingenieur MEB Group allnav als wichtiger Bestandteil der MEB Group Experten
Klassifizierung des kurzzeitigen Beobachtungsrauschens von 100 Hz GPS-Empfängern unter statischen und kinematischen Szenarien
 Klassifizierung des kurzzeitigen Beobachtungsrauschens von 100 Hz GPS-Empfängern unter statischen und kinematischen Szenarien - Geodätische Woche 2014, Berlin - Session 4: Angewandte Geodäsie und GNSS
Klassifizierung des kurzzeitigen Beobachtungsrauschens von 100 Hz GPS-Empfängern unter statischen und kinematischen Szenarien - Geodätische Woche 2014, Berlin - Session 4: Angewandte Geodäsie und GNSS
Geben Sie Ihrer Ausrüstung etwas mojo!
 www.mojortk.com 0800 756 9665 Geben Sie Ihrer Ausrüstung etwas mojo! Das neue No Drift mojortk von Leica Geosystems revolutioniert den Einsatz von RTK-Technologie in der Landwirtschaft. Warum sollten Sie
www.mojortk.com 0800 756 9665 Geben Sie Ihrer Ausrüstung etwas mojo! Das neue No Drift mojortk von Leica Geosystems revolutioniert den Einsatz von RTK-Technologie in der Landwirtschaft. Warum sollten Sie
Precise Point Positioning (PPP) in Hinblick auf Echtzeitanwendungen
 in Hinblick auf Echtzeitanwendungen") Katrin Huber Institut für Navigation Technische Universität Graz katrin.huber@tugraz.at Precise Point Positioning (PPP) in Hinblick auf Echtzeitanwendungen 8. November 0 Übersicht PPP Grundlagen INAS PPP
Katrin Huber Institut für Navigation Technische Universität Graz katrin.huber@tugraz.at Precise Point Positioning (PPP) in Hinblick auf Echtzeitanwendungen 8. November 0 Übersicht PPP Grundlagen INAS PPP
Empfängeruhrmodellierung in GNSS: Auswirkungen und Realisierbarkeit
 Empfängeruhrmodellierung in GNSS: Auswirkungen und Realisierbarkeit i it Ulrich Weinbach, ib Steffen Schön Institut für Erdmessung Motivation GNSS sind Einweg-Messverfahren. Problem der Zeitsynchronisation
Empfängeruhrmodellierung in GNSS: Auswirkungen und Realisierbarkeit i it Ulrich Weinbach, ib Steffen Schön Institut für Erdmessung Motivation GNSS sind Einweg-Messverfahren. Problem der Zeitsynchronisation
IONOSPHÄRISCHE KORREKTUR VON GNSS- EINFREQUENZDATEN MITTELS MULTILAYER MODELL
 IONOSPHÄRISCHE KORREKTUR VON GNSS- EINFREQUENZDATEN MITTELS MULTILAYER MODELL NINA MAGNET, ROBERT WEBER DEPARTMENT FÜR GEODÄSIE UND GEOINFORMATION TECHNISCHE UNIVERSITÄT WIEN ANGEWANDTE GEODÄSIE UND GNSS
IONOSPHÄRISCHE KORREKTUR VON GNSS- EINFREQUENZDATEN MITTELS MULTILAYER MODELL NINA MAGNET, ROBERT WEBER DEPARTMENT FÜR GEODÄSIE UND GEOINFORMATION TECHNISCHE UNIVERSITÄT WIEN ANGEWANDTE GEODÄSIE UND GNSS
RailPos Präzise Lage und Position von Zügen
 RailPos Präzise Lage und Position von Zügen DB Systel GmbH Konrad Winkler und Maurice Bergander I.LPA Berlin 14./15.04.2016 Warum benötigen wir ein autonomes System zur Bestimmung der Lage und Position
RailPos Präzise Lage und Position von Zügen DB Systel GmbH Konrad Winkler und Maurice Bergander I.LPA Berlin 14./15.04.2016 Warum benötigen wir ein autonomes System zur Bestimmung der Lage und Position
Zeit in der Geodäsie Relativitätstheorie im täglichen Leben
 Zeit in der Geodäsie Relativitätstheorie im täglichen Leben Urs Hugentobler Technische Universität München 100 Jahre Relativitätstheorie Symposium, ETZ Zürich 14. November 2015 GPS im täglichen Leben Genauigkeit
Zeit in der Geodäsie Relativitätstheorie im täglichen Leben Urs Hugentobler Technische Universität München 100 Jahre Relativitätstheorie Symposium, ETZ Zürich 14. November 2015 GPS im täglichen Leben Genauigkeit
Mobile GIS-Erfassung und Dokumentation im Facility Management am Beispiel Theater Dortmund
 Mobile GIS-Erfassung und Dokumentation im Facility Management am Beispiel Theater Dortmund Außendienst Das grafische Feldbuch Vom Feldvergleich bis zum Kataster Die Lösung für die hochgenaue GIS Datenerfassung
Mobile GIS-Erfassung und Dokumentation im Facility Management am Beispiel Theater Dortmund Außendienst Das grafische Feldbuch Vom Feldvergleich bis zum Kataster Die Lösung für die hochgenaue GIS Datenerfassung
Digitalisierung in der Bahninfrastruktur am Beispiel der Positionierung. ÖBB-Infrastruktur AG // GB SAE // Stab LCI
 Digitalisierung in der Bahninfrastruktur am Beispiel der Positionierung Dr. Michaela Haberler-Weber 21.6.2018 ÖBB-Infrastruktur AG Agenda Schwerpunkt 1: Mobile Mapping Schwerpunkt 2: Zugpositionierung
Digitalisierung in der Bahninfrastruktur am Beispiel der Positionierung Dr. Michaela Haberler-Weber 21.6.2018 ÖBB-Infrastruktur AG Agenda Schwerpunkt 1: Mobile Mapping Schwerpunkt 2: Zugpositionierung
Qualitätsuntersuchung photogrammetrischer Matchingverfahren mit Schrägluftbildern. Helge Olberding, Jurij Schmik
 Qualitätsuntersuchung photogrammetrischer Matchingverfahren mit Schrägluftbildern Helge Olberding, Jurij Schmik 16. Oldenburger 3D-Tage, 01.02. - 02.02.2017 INHALT Motivation Datengrundlage Luftbilder
Qualitätsuntersuchung photogrammetrischer Matchingverfahren mit Schrägluftbildern Helge Olberding, Jurij Schmik 16. Oldenburger 3D-Tage, 01.02. - 02.02.2017 INHALT Motivation Datengrundlage Luftbilder
Untersuchung des Einflusses von Antennennahfeldeffekten und Satellitenabschattungen auf die Genauigkeit GNSS-basierter Längenmessungen
 Geodätische Woche, Stuttgart 16. September 2015 Untersuchung des Einflusses von Antennennahfeldeffekten und Satellitenabschattungen auf die Genauigkeit GNSS-basierter Längenmessungen M.Sc. Florian Zimmermann
Geodätische Woche, Stuttgart 16. September 2015 Untersuchung des Einflusses von Antennennahfeldeffekten und Satellitenabschattungen auf die Genauigkeit GNSS-basierter Längenmessungen M.Sc. Florian Zimmermann
Produktdefinition LFPS Landwirtschaftlicher Fahrzeugpositionierungsservice Bayern
 Landesamt für Digitalisierung, Breitband und Vermessung Produktdefinition LFPS Landwirtschaftlicher Fahrzeugpositionierungsservice Bayern Version 1.0 2 1 Allgemeine Beschreibung des Landwirtschaftlichen
Landesamt für Digitalisierung, Breitband und Vermessung Produktdefinition LFPS Landwirtschaftlicher Fahrzeugpositionierungsservice Bayern Version 1.0 2 1 Allgemeine Beschreibung des Landwirtschaftlichen
Präzise Positions- und Orientierungsbestimmung eines UAVs in Echtzeit
 Geodätische Woche 08.-10. Oktober 2013 Präzise Positions- und Orientierungsbestimmung eines UAVs in Echtzeit Christian Eling, Lasse Klingbeil, Markus Wieland und Heiner Kuhlmann 08.10.2013 Inhaltsverzeichnis
Geodätische Woche 08.-10. Oktober 2013 Präzise Positions- und Orientierungsbestimmung eines UAVs in Echtzeit Christian Eling, Lasse Klingbeil, Markus Wieland und Heiner Kuhlmann 08.10.2013 Inhaltsverzeichnis
> Vortrag > Anja Heßelbarth GNSS in der Hydrographie GNSS in der Hydrographie. Anja Heßelbarth, Deutsches Zentrum für Luft- und Raumfahrt
 DLR.de Folie 1 GNSS in der Hydrographie Anja Heßelbarth, Deutsches Zentrum für Luft- und Raumfahrt DLR.de Folie 2 Motivation GNSS als Basis hydrographischer Messsysteme Vertikale Genauigkeit oft entscheidend
DLR.de Folie 1 GNSS in der Hydrographie Anja Heßelbarth, Deutsches Zentrum für Luft- und Raumfahrt DLR.de Folie 2 Motivation GNSS als Basis hydrographischer Messsysteme Vertikale Genauigkeit oft entscheidend
Leica Zeno GIS Lösungen für die mobile GIS Datenerfassung
 Leica Zeno GIS Lösungen für die mobile GIS Datenerfassung Leica GIS Produkte Geschichte GS50 GG02plus GG03 GS20 Zeno10/15 CS25 Zeno 5 CS25GNSS 2011 strictly confidential 2 Leica GIS Produkte Die richtige
Leica Zeno GIS Lösungen für die mobile GIS Datenerfassung Leica GIS Produkte Geschichte GS50 GG02plus GG03 GS20 Zeno10/15 CS25 Zeno 5 CS25GNSS 2011 strictly confidential 2 Leica GIS Produkte Die richtige
Lösungen vernetzen Zukunft gestalten
 Lösungen vernetzen Zukunft gestalten Zukunft schaffen: Neueste Messverfahren effizient integriert Norbert Sperhake, Christian Hubald Gemeinsame Auswertung aller Geodaten Bestandsdaten aus CAD, GIS, WEB
Lösungen vernetzen Zukunft gestalten Zukunft schaffen: Neueste Messverfahren effizient integriert Norbert Sperhake, Christian Hubald Gemeinsame Auswertung aller Geodaten Bestandsdaten aus CAD, GIS, WEB
HSW Systemhaus Sicherheitstechnik
 HSW Systemhaus Sicherheitstechnik ein Produkt von Hanseatische Schutz- und Wachdienst GmbH DroneTracker 2.0 Sicherheit für Ihr Unternehmen und Ihren Luftraum Sichern Sie Ihren Luftraum! Wieso Dedrone?
HSW Systemhaus Sicherheitstechnik ein Produkt von Hanseatische Schutz- und Wachdienst GmbH DroneTracker 2.0 Sicherheit für Ihr Unternehmen und Ihren Luftraum Sichern Sie Ihren Luftraum! Wieso Dedrone?
Leica Tour Spezial, Linstow, 7. Oktober 2011 Jörg Rubach, LAiV M-V
 1 und das SAPOS -Qualitätsmanagementtsmanagement der AdV Dr.-Ing. Jörg J Rubach Landesamt für f r innere Verwaltung Mecklenburg-Vorpommern 2 und das SAPOS -Qualitäts- management der AdV Gliederung 1. SAPOS
1 und das SAPOS -Qualitätsmanagementtsmanagement der AdV Dr.-Ing. Jörg J Rubach Landesamt für f r innere Verwaltung Mecklenburg-Vorpommern 2 und das SAPOS -Qualitäts- management der AdV Gliederung 1. SAPOS
Mobile Anwendungen für GNSS-Positionierung und GIS
 Mobile Anwendungen für GNSS-Positionierung und GIS Michael Schulz ALLSAT GmbH, Hannover Mobile Anwendungen für GNSS-Positionierung und GIS 1. Aktuelle Konfiguration 2. Zukünftige Entwicklungen 3. Anwendungsbeispiele
Mobile Anwendungen für GNSS-Positionierung und GIS Michael Schulz ALLSAT GmbH, Hannover Mobile Anwendungen für GNSS-Positionierung und GIS 1. Aktuelle Konfiguration 2. Zukünftige Entwicklungen 3. Anwendungsbeispiele
GNSS/IMU Integration für die präzise Bestimmung einer Flugtrajektorie
 GNSS/IMU Integration für die präzise Bestimmung einer Flugtrajektorie Fabian Hinterberger Institut für Geodäsie und Geophysik, Tu Wien 18. Nov. 2011 1 Motivation Motivation Gegenüberstellung Eigenschaften
GNSS/IMU Integration für die präzise Bestimmung einer Flugtrajektorie Fabian Hinterberger Institut für Geodäsie und Geophysik, Tu Wien 18. Nov. 2011 1 Motivation Motivation Gegenüberstellung Eigenschaften
Trackersysteme (Non Vision)
") Trackersysteme (Non Vision) Hauptseminar "Virtual and Augmented Reality 24.5.2004 Tracker Systeme Jürgen Pattis 1 Definition und Zweck von Tracking Def.: Ein Trackingsystem ist ein System, das einem Benutzer
Trackersysteme (Non Vision) Hauptseminar "Virtual and Augmented Reality 24.5.2004 Tracker Systeme Jürgen Pattis 1 Definition und Zweck von Tracking Def.: Ein Trackingsystem ist ein System, das einem Benutzer
Einstellanleitung zur Nutzung von SmartNet Germany über NTRIP mit System 1200
 Einstellanleitung zur Nutzung von SmartNet Germany über NTRIP mit System 1200 Inhalt: Sehr geehrte Leserinnen und Leser, im Folgenden finden Sie die Einstellungen, die Sie vorzunehmen sind um den Leica
Einstellanleitung zur Nutzung von SmartNet Germany über NTRIP mit System 1200 Inhalt: Sehr geehrte Leserinnen und Leser, im Folgenden finden Sie die Einstellungen, die Sie vorzunehmen sind um den Leica
Qualität der ALS50 Laserscanner Daten Befliegung Vaihingen/Enz
 Qualität der ALS50 Laserscanner Daten Befliegung Vaihingen/Enz Camillo Ressl, Matthias Ockermüller, Helmut Kager Institut für Photogrammetrie und Fernerkundung (I.P.F.), Technische Universität Wien www.ipf.tuwien.ac.at
Qualität der ALS50 Laserscanner Daten Befliegung Vaihingen/Enz Camillo Ressl, Matthias Ockermüller, Helmut Kager Institut für Photogrammetrie und Fernerkundung (I.P.F.), Technische Universität Wien www.ipf.tuwien.ac.at
Leica Viva TPS Die schnellste Totalstation
 Leica Viva TPS Die schnellste Totalstation Ihr Anspruch: eine schnelle Totalstat Erleben Sie Leica Viva TPS Die schnellste ihrer Klasse Mit Leica Viva TPS erledigen Sie Ihre Aufgaben schneller als je zuvor.
Leica Viva TPS Die schnellste Totalstation Ihr Anspruch: eine schnelle Totalstat Erleben Sie Leica Viva TPS Die schnellste ihrer Klasse Mit Leica Viva TPS erledigen Sie Ihre Aufgaben schneller als je zuvor.
Aktive und vorausschauende Sicherheitslösungen für ungeschützte Verkehrsteilnehmer
 Aktive und vorausschauende Sicherheitslösungen für ungeschützte Verkehrsteilnehmer GALILEO - Mehrwert für Verkehr und Mobilität? 1. 10. 2008, Technologiezentrum Salzkammergut G. Triebnig, EOX IT Services
Aktive und vorausschauende Sicherheitslösungen für ungeschützte Verkehrsteilnehmer GALILEO - Mehrwert für Verkehr und Mobilität? 1. 10. 2008, Technologiezentrum Salzkammergut G. Triebnig, EOX IT Services
Augmented Reality. (Die Realität fotorealistisch erweitern) Michael Zollhöfer Graphics, Vision, and Video Group
 Michael Zollhöfer Graphics, Vision, and Video Group") Augmented Reality (Die Realität fotorealistisch erweitern) Michael Zollhöfer Graphics, Vision, and Video Group gvv.mpi-inf.mpg.de Support / funding from: ERC Starting Grant CapReal Überblick Was ist Augmented
Augmented Reality (Die Realität fotorealistisch erweitern) Michael Zollhöfer Graphics, Vision, and Video Group gvv.mpi-inf.mpg.de Support / funding from: ERC Starting Grant CapReal Überblick Was ist Augmented
Die Bedeutung von BIM und digitaler Arbeitsabläufe Paul Sterzik (Leica Geosystems)
") Die Bedeutung von BIM und digitaler Arbeitsabläufe Paul Sterzik (Leica Geosystems) Was ist BIM? BIM ist ein Prozess zur Erfassung, Erstellung und Verwaltung von allen Informationen über ein Projekt während
Die Bedeutung von BIM und digitaler Arbeitsabläufe Paul Sterzik (Leica Geosystems) Was ist BIM? BIM ist ein Prozess zur Erfassung, Erstellung und Verwaltung von allen Informationen über ein Projekt während
Verkehr Analyse. Inhalt. Was ist Verkehr Analyse? Geschichte der Verkehr Analyse. Iavor Jelev Jintao Ding
 Inhalt Verkehr Analyse Iavor Jelev Jintao Ding Was ist Verkehr Analyse? Wozu ist die Verkehr Analyse gut? Wie kann man Verkehr Analyse machen? Anwendungsbeispiele Algorithmen für Verkehr Analyse Geschichte
Inhalt Verkehr Analyse Iavor Jelev Jintao Ding Was ist Verkehr Analyse? Wozu ist die Verkehr Analyse gut? Wie kann man Verkehr Analyse machen? Anwendungsbeispiele Algorithmen für Verkehr Analyse Geschichte
Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL
 DLR.de Folie 1 03.03.2015, ASW 2016, Wildau Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL DLR.de Folie 2 Agenda
DLR.de Folie 1 03.03.2015, ASW 2016, Wildau Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL DLR.de Folie 2 Agenda
Interaktion mit ubiquitären Umgebungen
 Interaktion mit ubiquitären Umgebungen Mathias Walker 4. Juni 2002 Fachseminar Verteilte Systeme Betreuer: Michael Rohs Dozent: Prof. Dr. F. Mattern Inhalt Ubiquitäre Umgebung Technische Anforderungen
Interaktion mit ubiquitären Umgebungen Mathias Walker 4. Juni 2002 Fachseminar Verteilte Systeme Betreuer: Michael Rohs Dozent: Prof. Dr. F. Mattern Inhalt Ubiquitäre Umgebung Technische Anforderungen
Der Forschungsgyrocopter der Hochschule Anhalt als Sensorträger
 Der Forschungsgyrocopter der Hochschule Anhalt als Sensorträger M.Eng. Tobias Kirschke Prof. Dr. Lothar Koppers Prof. Dr. Lutz Bannehr M.Eng. Christoph Ulrich Institut für Geoinformation und Vermessung
Der Forschungsgyrocopter der Hochschule Anhalt als Sensorträger M.Eng. Tobias Kirschke Prof. Dr. Lothar Koppers Prof. Dr. Lutz Bannehr M.Eng. Christoph Ulrich Institut für Geoinformation und Vermessung
Improving the Accuracy of GPS
 Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Stand und Entwicklungsperspektiven 3D Laser Scanning. Thomas Schock Leica Geosystems GmbH, München
 Stand und Entwicklungsperspektiven 3D Laser Scanning Thomas Schock Leica Geosystems GmbH, München Stand und Entwicklungsperspektiven Agenda Merkmale des 3D Laser Scanning Aktuelle Entwicklungen Hard- und
Stand und Entwicklungsperspektiven 3D Laser Scanning Thomas Schock Leica Geosystems GmbH, München Stand und Entwicklungsperspektiven Agenda Merkmale des 3D Laser Scanning Aktuelle Entwicklungen Hard- und
Universität Stuttgart , Christian Hilker
 GPS/GLONASS und GALILEO aus Sicht eines geodätischen Geräteherstellers Universität Stuttgart 03.07.2007, Christian Hilker 1 Inhalt GNSS- Übersicht GPS/GLONASS /Galileo Galileo Receiver Prototyp: Projekt
GPS/GLONASS und GALILEO aus Sicht eines geodätischen Geräteherstellers Universität Stuttgart 03.07.2007, Christian Hilker 1 Inhalt GNSS- Übersicht GPS/GLONASS /Galileo Galileo Receiver Prototyp: Projekt
Think Forward. Juergen Dold, CEO Leica Geosystems / Hexagon Geosystems
 Think Forward Juergen Dold, CEO Leica Geosystems / Hexagon Geosystems 1 EIN VERGLEICH MIT DER MUSIK... 2 Entwicklungen in der Musik Phonograph Album Kassette Digitale Musik Mobilität 1899 1940 s 1950 s
Think Forward Juergen Dold, CEO Leica Geosystems / Hexagon Geosystems 1 EIN VERGLEICH MIT DER MUSIK... 2 Entwicklungen in der Musik Phonograph Album Kassette Digitale Musik Mobilität 1899 1940 s 1950 s
FQ Vision Sensor Pressekonferenz - Vision 2010 Stuttgart
 FQ Vision Sensor Pressekonferenz - Vision 2010 Stuttgart Karin Müller / Ralf Lattuch / Roman Vracko / Stephan Farsen FQ Vision Sensor Kristallklare Bilder Einfachste Bedienung Roman Vracko Produkt Marketing
FQ Vision Sensor Pressekonferenz - Vision 2010 Stuttgart Karin Müller / Ralf Lattuch / Roman Vracko / Stephan Farsen FQ Vision Sensor Kristallklare Bilder Einfachste Bedienung Roman Vracko Produkt Marketing
Entwicklung, Kalibrierung und Evaluierung eines tragbaren direkt georeferenzierten Laserscanning Systems für kinematische Anwendungen
 Entwicklung, Kalibrierung und Evaluierung eines tragbaren direkt georeferenzierten Laserscanning Systems für kinematische Anwendungen Geodätische Woche 2015, Stuttgart Erik Heinz, Christian Eling, Lasse
Entwicklung, Kalibrierung und Evaluierung eines tragbaren direkt georeferenzierten Laserscanning Systems für kinematische Anwendungen Geodätische Woche 2015, Stuttgart Erik Heinz, Christian Eling, Lasse
APOS Real Time- DGPS Echtzeitpositionierung mit Submeter - Genauigkeit. Ernst Zahn
 APOS Real Time- DGPS Echtzeitpositionierung mit Submeter - Genauigkeit Ernst Zahn Teilprodukt: APOS Real Time - DGPS APOS: Kurzvorstellung, Chronologie, Status Ergebnisse der DGPS-Testmessungen 2005 Zugang
APOS Real Time- DGPS Echtzeitpositionierung mit Submeter - Genauigkeit Ernst Zahn Teilprodukt: APOS Real Time - DGPS APOS: Kurzvorstellung, Chronologie, Status Ergebnisse der DGPS-Testmessungen 2005 Zugang
GIS-basierte GPS-Aufnahmen in der Sächsischen Forstverwaltung
 GIS-basierte GPS-Aufnahmen in der Sächsischen Forstverwaltung Satellitenpositionierung in der Forstwirtschaft Landesforstpräsidium Gliederung bestandesbedingte Probleme Wahl des Korrekturdatendienstes
GIS-basierte GPS-Aufnahmen in der Sächsischen Forstverwaltung Satellitenpositionierung in der Forstwirtschaft Landesforstpräsidium Gliederung bestandesbedingte Probleme Wahl des Korrekturdatendienstes
Leica SmartStation Totalstation mit integriertem GNSS
 Leica SmartStation Totalstation mit integriertem GNSS Leica SmartStation Totalstation mit integriertem GNSS Ein neues, revolutionäres Vermessungssystem, das weltweit erstmals TPS und GNSS in einem Instrument
Leica SmartStation Totalstation mit integriertem GNSS Leica SmartStation Totalstation mit integriertem GNSS Ein neues, revolutionäres Vermessungssystem, das weltweit erstmals TPS und GNSS in einem Instrument
Erhöhung der räumlichen Auflösung oder Steigerung der Einzelpunktgenauigkeit beim Laserscanning?
 Erhöhung der räumlichen Auflösung oder Steigerung der Einzelpunktgenauigkeit beim Laserscanning? 17. Oldenburger 3D-Tage 2018 Erik Heinz, Christoph Holst und Heiner Kuhlmann Institut für Geodäsie und Geoinformation
Erhöhung der räumlichen Auflösung oder Steigerung der Einzelpunktgenauigkeit beim Laserscanning? 17. Oldenburger 3D-Tage 2018 Erik Heinz, Christoph Holst und Heiner Kuhlmann Institut für Geodäsie und Geoinformation
GLONASS: das russische Pendant von GPS
 Hochschule für Technik Rapperswil 6. Januar 2010 Inhaltsverzeichnis Überblick Navigationsnachricht Vergleich der Satellitensignale Beispiele von GLONASS-Empfängern Zukunft von GLONASS 1 Vergleich zwischen
Hochschule für Technik Rapperswil 6. Januar 2010 Inhaltsverzeichnis Überblick Navigationsnachricht Vergleich der Satellitensignale Beispiele von GLONASS-Empfängern Zukunft von GLONASS 1 Vergleich zwischen
Leica ScanStation C5 Modularer Laserscanner
 Leica ScanStation C5 Modularer Laserscanner Leica ScanStation C5 Jederzeit ausbaufähig Mit dem Basismodul sind Sie jederzeit in der Lage auf Marktveränderungen zu reagieren und durch Upgrades Ihr Geschäft
Leica ScanStation C5 Modularer Laserscanner Leica ScanStation C5 Jederzeit ausbaufähig Mit dem Basismodul sind Sie jederzeit in der Lage auf Marktveränderungen zu reagieren und durch Upgrades Ihr Geschäft
m4guide mobile multimodal mobility guide
 m4guide mobile multimodal mobility guide Auftaktveranstaltung Tür zu Tür - Projekte des Bundesministeriums für Wirtschaft und Technologie 17.Oktober 2013 in Bonn Referent: Michael Beer Inhalt 1. Projektziele
m4guide mobile multimodal mobility guide Auftaktveranstaltung Tür zu Tür - Projekte des Bundesministeriums für Wirtschaft und Technologie 17.Oktober 2013 in Bonn Referent: Michael Beer Inhalt 1. Projektziele
Auswertung von flugzeuggestützten GPS- Messungen für die Anwendung in der Fluggravimetrie
 Auswertung von flugzeuggestützten GPS- Messungen für die Anwendung in der Fluggravimetrie S. Balssen, U. Meyer, I. Heyde, C. Knöfel, M. Fritsche, R. Dietrich, M. Scheinert Geodätische Woche 2010 Köln,
Auswertung von flugzeuggestützten GPS- Messungen für die Anwendung in der Fluggravimetrie S. Balssen, U. Meyer, I. Heyde, C. Knöfel, M. Fritsche, R. Dietrich, M. Scheinert Geodätische Woche 2010 Köln,
RIWA Anwendertreffen 2014 GPS, GNSS, Genauigkeiten, Lösungen
 RIWA Anwendertreffen 2014 GPS, GNSS, Genauigkeiten, Lösungen PPM GmbH DIE PPM GMBH - gegründet 1998 - ist ein Handels- und Dienstleistungsunternehmen mit Sitz im oberbayrischen Penzberg. DIE PPM GMBH VERSTEHT
RIWA Anwendertreffen 2014 GPS, GNSS, Genauigkeiten, Lösungen PPM GmbH DIE PPM GMBH - gegründet 1998 - ist ein Handels- und Dienstleistungsunternehmen mit Sitz im oberbayrischen Penzberg. DIE PPM GMBH VERSTEHT
railgate Galileo-Testgebiet für Schienenfahrzeug-Anwendungen Dipl.-Ing. Thomas Engelhardt
 railgate Galileo-Testgebiet für Schienenfahrzeug-Anwendungen Dipl.-Ing. Thomas Engelhardt Institut für Regelungstechnik 19.09.2014 Vortragsinhalte Satellitennavigationssystem Galileo Forschungsprojekte
railgate Galileo-Testgebiet für Schienenfahrzeug-Anwendungen Dipl.-Ing. Thomas Engelhardt Institut für Regelungstechnik 19.09.2014 Vortragsinhalte Satellitennavigationssystem Galileo Forschungsprojekte
Automatische Erkennung von Fortbewegungsmitteln AW2. Christian Wagner
 Automatische Erkennung von Fortbewegungsmitteln AW2 Christian Wagner 11.06.2009 Agenda Einführung ins Thema Ziel Ansätze Forschungsbereich: Sensor Fusion Projekte Techniken Einordnung der Arbeit Ziele
Automatische Erkennung von Fortbewegungsmitteln AW2 Christian Wagner 11.06.2009 Agenda Einführung ins Thema Ziel Ansätze Forschungsbereich: Sensor Fusion Projekte Techniken Einordnung der Arbeit Ziele
DROHNENINSPEKTION ZERTIFIZIERTE WERKSTOFFPRÜFUNG MITTELS DROHNENINSPEKTION
 DROHNENINSPEKTION ZERTIFIZIERTE WERKSTOFFPRÜFUNG MITTELS DROHNENINSPEKTION 2 3 Unser Angebot Wir bieten zertifizierte Brückeninspektionen Solar- Photovoltaikanlagen Hochspannungsleitungen Telekommunikation
DROHNENINSPEKTION ZERTIFIZIERTE WERKSTOFFPRÜFUNG MITTELS DROHNENINSPEKTION 2 3 Unser Angebot Wir bieten zertifizierte Brückeninspektionen Solar- Photovoltaikanlagen Hochspannungsleitungen Telekommunikation
Galileo. Satellitennavigation System
 Galileo Satellitennavigation System Übersicht Was ist Galileo Geschichte - Status - Aussicht System Architektur Weltraumsegment Bodensegment Signal- und Frequenzplan Die Zeit Galileo "ready" + GPS tauglich
Galileo Satellitennavigation System Übersicht Was ist Galileo Geschichte - Status - Aussicht System Architektur Weltraumsegment Bodensegment Signal- und Frequenzplan Die Zeit Galileo "ready" + GPS tauglich
Breitbandige Aufzeichnung und Wiedergabe. Manuel Bogedain, Noffz Computertechnik GmbH
 Breitbandige Aufzeichnung und Wiedergabe von RF Signalen für die GNSS Analyse Manuel Bogedain, Noffz Computertechnik GmbH Themenüberblick Einführung und Kurzvorstellung Herausforderungen an das Testen
Breitbandige Aufzeichnung und Wiedergabe von RF Signalen für die GNSS Analyse Manuel Bogedain, Noffz Computertechnik GmbH Themenüberblick Einführung und Kurzvorstellung Herausforderungen an das Testen
LiDAR Mobile Mapping
 Institut für Kartographie und Geoinformatik Leibniz Universität Hannover LiDAR Mobile Mapping Visualisierung, Vermessung, Fahrerassistenz Claus.Brenner@ikg.uni-hannover.de IKG Erfassungsfahrzeug Riegl
Institut für Kartographie und Geoinformatik Leibniz Universität Hannover LiDAR Mobile Mapping Visualisierung, Vermessung, Fahrerassistenz Claus.Brenner@ikg.uni-hannover.de IKG Erfassungsfahrzeug Riegl
Effiziente, berührungslose Erfassung der Gleisinfrastrukturobjekte
 Effiziente, berührungslose Erfassung der Gleisinfrastrukturobjekte Ein aktuelles Forschungsprojekt der ÖBB-Infrastruktur AG, ÖBB-Infrastruktur AG, Stab Forschung&Entwicklung 55 2 XXXX22 Organigramm ÖBB-Konzern
Effiziente, berührungslose Erfassung der Gleisinfrastrukturobjekte Ein aktuelles Forschungsprojekt der ÖBB-Infrastruktur AG, ÖBB-Infrastruktur AG, Stab Forschung&Entwicklung 55 2 XXXX22 Organigramm ÖBB-Konzern
Globale Navigations Satelliten Systeme - GNSS
 Globale Navigations Satelliten Systeme - GNSS Inhalt Sputnik 1 und die Folgen Die ersten GNSS - Navy Navigation Satellite System und Tsikada Entwicklung des Global Positioning System und des Glonass Die
Globale Navigations Satelliten Systeme - GNSS Inhalt Sputnik 1 und die Folgen Die ersten GNSS - Navy Navigation Satellite System und Tsikada Entwicklung des Global Positioning System und des Glonass Die
Neue Esri-Apps für Routing, Datenerfassung und Workforcemanagement
 Neue Esri-Apps für Routing, Datenerfassung und Workforcemanagement Vorstellung neuer Esri-Apps an praktischen Einsatzbeispielen Nicola Forster, GI Geoinformatik GmbH ArcGIS Plattform Karten entdecken,
Neue Esri-Apps für Routing, Datenerfassung und Workforcemanagement Vorstellung neuer Esri-Apps an praktischen Einsatzbeispielen Nicola Forster, GI Geoinformatik GmbH ArcGIS Plattform Karten entdecken,
Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung
 Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung Mobiles Laserscanning Straßenraum
Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung Mobiles Laserscanning Straßenraum