POMAR 3D. Positionierung und Orientierung Clients. Dipl.-Ing. Elise Taichmann. NAVIGATIONS-GET-TOGETHER 20. Oktober 2009, Graz
|
|
|
- Robert Walter
- vor 5 Jahren
- Abrufe
Transkript


1 POMAR 3D Positionierung und Orientierung eines Augmented-Reality Clients Dipl.-Ing. Elise Taichmann 20. Oktober 2009, Graz
2 Inhalt 1. Das Projekt 2. Die Anwendung 3. Herausforderungen 4. Umsetzung 5. Beispiele 6. Ausblick 1
3 Das Projekt POMAR 3D Positionierung und Orientierung eines Augmented-Reality Clients Förderung: Bundesministerium für Verkehr, Innovation u. Technologie Projektpartner: Institut für Navigation und Satellitengeodäsie der TU Graz Institut für Maschinelles Sehen und Darstellen der TU Graz (ICG) TeleConsult Austria (Subauftragnehmer) Laufzeit: 13 Monate 2
4 Die Anwendung Augmented Reality Augmented vs. Virtual Reality Einsatzgebiete Virtual Reality: Flugsimulatoren Architektur Unterhaltung Industrie Filmindustrie Einsatzgebiete Augmented Reality: Medizin Industrie Fahrzeugentwicklung Navigation 3

5 Die Anwendung POMAR 3D Positionierungs- und Orientierungsmodul für einen mobilen Augmented-Reality Client zur 3D-Echtzeitvisualisierung unterirdischer Ver- und Entsorgungsinfrastruktur Überblendung mit der Realität Vorteile: Planung Wartung und Ausbau Konfliktlösung _vidente_project_info.pdf, Nov. 2008


6 Herausforderungen Sensoren NovAtel: OMEV-1 L1 Empfänger DGPS/RTK fähig IMU: Xsens MTi-G 3-achsiges Gyroskop 3-achsiges Accelerometer 3-achsiges Magnetometer Temperatursensor Integrierter Miniatur-GPS-Empfänger Barometer Integrierte Attitudelösung 5

7 Herausforderungen Motivation Formfaktor des Augmented-Reality Clients Low-cost Hardware Attitudebestimmung und Positionierung bei geringer Kinematik Hohe Genauigkeitsanforderungen 6
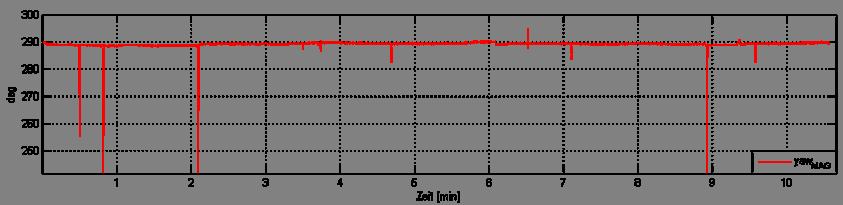
8 Herausforderungen Kreiseldrift Systematischer Fehler der Drehraten Beispiel: Drehraten bei statischem Inertialsensor 7

9 Herausforderungen Kreiseldrift 8


10 Herausforderungen Störungen des Magnetfeldes Variation Ursache: globales Magnetfeld Bekannte Größe aus Magnetfeldmodellen Östlich/westlich Deviation Ursache: lokales Magnetfeld Unbekannte Größe Distanzabhängig Östlich/westlich 9
 Horizontierungsparameter (Beschleunigungssensoren) Position Lage und Höhe (DGPS bzw.")
11 Umsetzung Positionierungs- & Orientierungsmodul Attitude Xsens Attitudelösung Rohdatenlevel Drehraten (Kreisel) Heading (Magnetometer) Horizontierungsparameter (Beschleunigungssensoren) Position Lage und Höhe (DGPS bzw. RTK) Höhe (Barometer) 10
12 Umsetzung Kalman-Filterung Systematischer Fehler der Drehraten Ziel: Schätzung einer driftfreien Attitude Annahme: Es tritt keine Deviation auf! Deviation des magnetischen Headings Ziel: Schätzung eines deviationsfreien Headings Annahme: Die Drehraten besitzen keinen Bias! Richtungsinitialisierung! Position Ziel: Integrierte Positionsschätzung mit barometrischer Höhe 11
13 Umsetzung Erkenntnisse Bessere Genauigkeiten auf Rohdatenlevel Zwei sich überlagernde Effekte: Kreiseldrift Störungen des Magnetfeldes Kalman-Filterung kann erfolgreich zur Schätzung systematischer Fehler der Kreisel herangezogen werden Deviationsschätzung prinzipiell möglich (kurzzeitige/anhaltende Deviationen) Gegenseitige Stützung von Drehraten und magnetischem Heading Schätzung des systematischen Fehlers der Drehraten Deviationsschätzung 12
14 Beispiele Attitude Systematischer Fehler der Drehraten Ziel: Schätzung einer driftfreien Attitude Annahme: Es tritt keine Deviation auf! Deviation des magnetischen Headings Ziel: Schätzung eines deviationsfreien Headings Annahme: Die Drehraten besitzen keinen Bias! Richtungsinitialisierung! Statischer Sensor Position Ziel: Integrierte Positionsschätzung mit barometrischer Höhe 13


15 Beispiele 14 Attitude Statischer Sensor Statischer Sensor


16 Beispiele 15 Attitude Bewegter Sensor Bewegter Sensor
17 Beispiele Kurzzeitige Deviation Systematischer Fehler der Drehraten Ziel: Schätzung einer driftfreien Attitude Annahme: Es tritt keine Deviation auf! Deviation des magnetischen Headings Ziel: Schätzung eines deviationsfreien Headings Annahme: Die Drehraten besitzen keinen Bias! Richtungsinitialisierung! Position Ziel: Integrierte Positionsschätzung mit barometrischer Höhe 16

18 Beispiele Kurzzeitige Deviation 17


19 Beispiele Kurzzeitige Deviation Systematischer Fehler der Drehraten 18


20 Beispiele Kurzzeitige Deviation Systematischer Fehler der Drehraten 19


21 Beispiele Kurzzeitige Deviation Deviation des magnetischen Headings 20


22 Beispiele Kurzzeitige Deviation Systematischer Fehler der Drehraten + Deviation des magnetischen Headings 21
23 Ausblick Ausblick Kombination von Bias- und Deviationsschätzung durch zusätzliche Headinginformation GPS-Antennenarray Bildgestützte Methoden Geodaten GPS-Positionsänderungen (bei Kinematik) Smart Vidente (ICG) 22
24 Danke für f r die Aufmerksamkeit!
Navigation von RPAS Ahorn 2014 Graz. Markus Dorn Institut für Navigation Nawi Graz, Technische Universität Graz
 Navigation von RPAS Ahorn 214 Graz Markus Dorn Institut für Navigation Nawi Graz, Technische Universität Graz markus.dorn@tugraz.at Einleitung OMOSA (Open Modular/Open Source Avionics Architecture for
Navigation von RPAS Ahorn 214 Graz Markus Dorn Institut für Navigation Nawi Graz, Technische Universität Graz markus.dorn@tugraz.at Einleitung OMOSA (Open Modular/Open Source Avionics Architecture for
Orientierungsbestimmung mobiler Objekte unter Verwendung von Magnet- und MEMS Inertialsensoren
 . Orientierungsbestimmung mobiler Objekte unter Verwendung von Magnet- und MEMS Inertialsensoren Geodätische Woche 2013 F. Zimmermann, C. Eling, L. Klingbeil, H. Kuhlmann 08.10.2013 Unmanned Aerial Vehicle
. Orientierungsbestimmung mobiler Objekte unter Verwendung von Magnet- und MEMS Inertialsensoren Geodätische Woche 2013 F. Zimmermann, C. Eling, L. Klingbeil, H. Kuhlmann 08.10.2013 Unmanned Aerial Vehicle
Trajektorienbestimmung im Skisprung
 Dipl.-Ing. Petra Hafner Steyrergasse 30, 8010 Graz Trajektorienbestimmung im Skisprung P. Hafner M. Wieser N. Kühtreiber B. Wiesenhofer C. Abart B. Hofmann-Wellenhof (INAS) T. Nunner G. Paar (Joanneum
Dipl.-Ing. Petra Hafner Steyrergasse 30, 8010 Graz Trajektorienbestimmung im Skisprung P. Hafner M. Wieser N. Kühtreiber B. Wiesenhofer C. Abart B. Hofmann-Wellenhof (INAS) T. Nunner G. Paar (Joanneum
INDOOR-POSITIONIERUNG
 INDOOR-POSITIONIERUNG EIN ÜBERBLICK MIT AUSGEWÄHLTEN BEISPIELEN Jörg Blankenbach Geodätisches Institut, RWTH Aachen DGfK-Syposium 2015 Königslutter, 11.05.2015 Einleitung Motivation Nachfrage nach der
INDOOR-POSITIONIERUNG EIN ÜBERBLICK MIT AUSGEWÄHLTEN BEISPIELEN Jörg Blankenbach Geodätisches Institut, RWTH Aachen DGfK-Syposium 2015 Königslutter, 11.05.2015 Einleitung Motivation Nachfrage nach der
Improving the Accuracy of GPS
 Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Quadrocopters and it s Applications: Overview of State of the Art Techniques
 : Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
: Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
INDOOR-POSITIONIERUNG
 INDOOR-POSITIONIERUNG EIN ÜBERBLICK MIT AUSGEWÄHLTEN BEISPIELEN Jörg Blankenbach Geodätisches Institut, RWTH Aachen Workshop 3D-Stadtmodelle Bonn, 05.11.2014 Agenda Ausgewählte Systeme Infrastrukturgestützte
INDOOR-POSITIONIERUNG EIN ÜBERBLICK MIT AUSGEWÄHLTEN BEISPIELEN Jörg Blankenbach Geodätisches Institut, RWTH Aachen Workshop 3D-Stadtmodelle Bonn, 05.11.2014 Agenda Ausgewählte Systeme Infrastrukturgestützte
Augmented Reality. technische Möglichkeiten und praktische Anwendung. Prof. Dr. Gerhard Reitmayr ICG, TU Graz
 Augmented Reality technische Möglichkeiten und praktische Anwendung Prof. Dr. Gerhard Reitmayr ICG, TU Graz Daten mit Raumbezug 2 Visualisierung Augmented Reality 3 Augmented Reality Verbindet Reales und
Augmented Reality technische Möglichkeiten und praktische Anwendung Prof. Dr. Gerhard Reitmayr ICG, TU Graz Daten mit Raumbezug 2 Visualisierung Augmented Reality 3 Augmented Reality Verbindet Reales und
Augmented Reality als moderne Darstellungsform von Geodaten
 Augmented Reality als moderne Darstellungsform von Geodaten Mag. Sven Leitinger Salzburg Research Forschungsgesellschaft mbh Was ist Augmented Reality? Augmented Reality = erweiterte Realität "computergestützte
Augmented Reality als moderne Darstellungsform von Geodaten Mag. Sven Leitinger Salzburg Research Forschungsgesellschaft mbh Was ist Augmented Reality? Augmented Reality = erweiterte Realität "computergestützte
gps100/speed Technische Spezifikationen
 gps100/speed Technische Spezifikationen Stand: 07/018 100Hz Dual GPS D IMU CAN FD/.0 Analog Digital Der gps100/speed ist die konsequente Weiterentwicklung und Umsetzung der gps100-technologie. In einem
gps100/speed Technische Spezifikationen Stand: 07/018 100Hz Dual GPS D IMU CAN FD/.0 Analog Digital Der gps100/speed ist die konsequente Weiterentwicklung und Umsetzung der gps100-technologie. In einem
RailPos Präzise Lage und Position von Zügen
 RailPos Präzise Lage und Position von Zügen DB Systel GmbH Konrad Winkler und Maurice Bergander I.LPA Berlin 14./15.04.2016 Warum benötigen wir ein autonomes System zur Bestimmung der Lage und Position
RailPos Präzise Lage und Position von Zügen DB Systel GmbH Konrad Winkler und Maurice Bergander I.LPA Berlin 14./15.04.2016 Warum benötigen wir ein autonomes System zur Bestimmung der Lage und Position
Die Notwendigkeit von GNSS Interference Monitoring in Österreich
 Die Notwendigkeit von GNSS Interference Monitoring in Österreich Sascha Bartl, BSc TeleConsult Austria GmbH (Graz, Austria) AHORN 2014 der Alpenraum und seine Herausforderungen im Bereich Orientierung,
Die Notwendigkeit von GNSS Interference Monitoring in Österreich Sascha Bartl, BSc TeleConsult Austria GmbH (Graz, Austria) AHORN 2014 der Alpenraum und seine Herausforderungen im Bereich Orientierung,
Chancen der Industrie 4.0 durch moderne Lokalisierungstechniken
 Chancen der Industrie 4.0 durch moderne Lokalisierungstechniken 3. AnalytikTag 15. November 2018 Prof. Dr. Bodo Kraft, kraft@fh-aachen.de Oliver Schmidts, M. Sc., schmidts@fh-aachen.de FH AACHEN UNIVERSITY
Chancen der Industrie 4.0 durch moderne Lokalisierungstechniken 3. AnalytikTag 15. November 2018 Prof. Dr. Bodo Kraft, kraft@fh-aachen.de Oliver Schmidts, M. Sc., schmidts@fh-aachen.de FH AACHEN UNIVERSITY
Augmented Reality als moderne Darstellungsform für Geodaten
 Augmented Reality als moderne Darstellungsform für Geodaten VOGIS-Fachtagung 2010 11. November 2010 DI Karl Rehrl Salzburg Research Forschungsgesellschaft m.b.h. Jakob Haringer Straße 5/3 5020 Salzburg,
Augmented Reality als moderne Darstellungsform für Geodaten VOGIS-Fachtagung 2010 11. November 2010 DI Karl Rehrl Salzburg Research Forschungsgesellschaft m.b.h. Jakob Haringer Straße 5/3 5020 Salzburg,
Augmented Reality. (Die Realität fotorealistisch erweitern) Michael Zollhöfer Graphics, Vision, and Video Group
 Michael Zollhöfer Graphics, Vision, and Video Group") Augmented Reality (Die Realität fotorealistisch erweitern) Michael Zollhöfer Graphics, Vision, and Video Group gvv.mpi-inf.mpg.de Support / funding from: ERC Starting Grant CapReal Überblick Was ist Augmented
Augmented Reality (Die Realität fotorealistisch erweitern) Michael Zollhöfer Graphics, Vision, and Video Group gvv.mpi-inf.mpg.de Support / funding from: ERC Starting Grant CapReal Überblick Was ist Augmented
Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo
 Geodäsie 4.0 - was erwartet uns Geodäten? Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo Xiaoguang Luo Leica Geosystems AG, Heerbrugg Seminar an der HFT Stuttgart,
Geodäsie 4.0 - was erwartet uns Geodäten? Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo Xiaoguang Luo Leica Geosystems AG, Heerbrugg Seminar an der HFT Stuttgart,
m4guide mobile multimodal mobility guide
 m4guide mobile multimodal mobility guide Auftaktveranstaltung Tür zu Tür - Projekte des Bundesministeriums für Wirtschaft und Technologie 17.Oktober 2013 in Bonn Referent: Michael Beer Inhalt 1. Projektziele
m4guide mobile multimodal mobility guide Auftaktveranstaltung Tür zu Tür - Projekte des Bundesministeriums für Wirtschaft und Technologie 17.Oktober 2013 in Bonn Referent: Michael Beer Inhalt 1. Projektziele
GNSS/IMU Integration für die präzise Bestimmung einer Flugtrajektorie
 GNSS/IMU Integration für die präzise Bestimmung einer Flugtrajektorie Fabian Hinterberger Institut für Geodäsie und Geophysik, Tu Wien 18. Nov. 2011 1 Motivation Motivation Gegenüberstellung Eigenschaften
GNSS/IMU Integration für die präzise Bestimmung einer Flugtrajektorie Fabian Hinterberger Institut für Geodäsie und Geophysik, Tu Wien 18. Nov. 2011 1 Motivation Motivation Gegenüberstellung Eigenschaften
Heute wird es interaktiv! Wer mitmachen möchte, kann sich folgende Apps herunterladen:
 Heute wird es interaktiv! Wer mitmachen möchte, kann sich folgende Apps herunterladen: Name Betriebssystem Vorraussetzungen Layar Android, ios Internetzugang Wikitude Android, ios, BlackBerry, Windows
Heute wird es interaktiv! Wer mitmachen möchte, kann sich folgende Apps herunterladen: Name Betriebssystem Vorraussetzungen Layar Android, ios Internetzugang Wikitude Android, ios, BlackBerry, Windows
Einführung in Augmented Reality (AR) Voraussetzungen für den mobilen Einsatz im Außenbereich Anwendungen
 Voraussetzungen für den mobilen Einsatz im Außenbereich Anwendungen") Übersicht Einführung in Augmented Reality (AR) Voraussetzungen für den mobilen Einsatz im Außenbereich Anwendungen Beispiel: AR in den Medien Quelle: EPSIS, http://www.symah-vision.fr 1 Definition von
Übersicht Einführung in Augmented Reality (AR) Voraussetzungen für den mobilen Einsatz im Außenbereich Anwendungen Beispiel: AR in den Medien Quelle: EPSIS, http://www.symah-vision.fr 1 Definition von
Innovationen als Chance für Freiberufler Entwicklung geodätischer Messsysteme
 Innovationen als Chance für Freiberufler Entwicklung geodätischer Messsysteme Dr.-Ing. Christian Hesse (Dr. Hesse und Partner, Hamburg) Innovationen als Chance für Freiberufler 1 Situation 2008 Klassisches
Innovationen als Chance für Freiberufler Entwicklung geodätischer Messsysteme Dr.-Ing. Christian Hesse (Dr. Hesse und Partner, Hamburg) Innovationen als Chance für Freiberufler 1 Situation 2008 Klassisches
Multi-Touch- und Multi-User-Interfaces Björn Frömmer
 Multi-Touch- und Multi-User-Interfaces Björn Frömmer Tracking Was ist Tracking? Was kann alles getracked werden? Wie funktioniert Tracking? [ ] Finger tracken! Was ist Tracking? Tracking bedeutet, ein
Multi-Touch- und Multi-User-Interfaces Björn Frömmer Tracking Was ist Tracking? Was kann alles getracked werden? Wie funktioniert Tracking? [ ] Finger tracken! Was ist Tracking? Tracking bedeutet, ein
Ist Collaborative Positioning eine geeignete Lösung bei GNSS Beeinträchtigungen?
 Symposium St. Ulrich bei Steyr Ist Collaborative Positioning eine geeignete Lösung bei GNSS Beeinträchtigungen? Guenther Retscher Department Geodäsie und Geoinformation, FG Ingenieurgeodäsie Technische
Symposium St. Ulrich bei Steyr Ist Collaborative Positioning eine geeignete Lösung bei GNSS Beeinträchtigungen? Guenther Retscher Department Geodäsie und Geoinformation, FG Ingenieurgeodäsie Technische
Aktuell. Quelle: ORF Steiermark
 SARONTAR Search And Rescue Optimisation by satellite Navigation Technologies in Alpine Regions Der Wettlauf gegen die Zeit bei Unfällen im alpinen Gelände Hans-Peter Ranner Bad Reichenhall, 20./21. November
SARONTAR Search And Rescue Optimisation by satellite Navigation Technologies in Alpine Regions Der Wettlauf gegen die Zeit bei Unfällen im alpinen Gelände Hans-Peter Ranner Bad Reichenhall, 20./21. November
VR Virtual Reality. Moderne Präsentationstechniken für Industrie und Werbung. BOHNER.concept & Hamecher Websolutions
 BOHNER.concept & Hamecher Websolutions BOHNER.concept Agentur für kreative Kommunikation & Design www.bohner-concept.de Member of Alliance of German Designers Was ist VR? www.bohner-concept.de 2 Was ist
BOHNER.concept & Hamecher Websolutions BOHNER.concept Agentur für kreative Kommunikation & Design www.bohner-concept.de Member of Alliance of German Designers Was ist VR? www.bohner-concept.de 2 Was ist
Anwendungsbezogenes Tracking
 Institut für Computervisualistik Universität Koblenz 4. Juli 2011 Inhaltsverzeichnis 1 Sensorbasiertes Tracking GPS WLan Elektronischer Kompass Inertialsensoren 2 Bildbasiertes Tracking Markerbasiertes
Institut für Computervisualistik Universität Koblenz 4. Juli 2011 Inhaltsverzeichnis 1 Sensorbasiertes Tracking GPS WLan Elektronischer Kompass Inertialsensoren 2 Bildbasiertes Tracking Markerbasiertes
Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren.
 Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren www.joanneum.at/digital Wozu braucht mein Auto eine Karte? 2 Mensch als Fahrer: Karte wird zum Navigieren
Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren www.joanneum.at/digital Wozu braucht mein Auto eine Karte? 2 Mensch als Fahrer: Karte wird zum Navigieren
10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart
 10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart M.Eng. Marius Ziegler Projektleiter: Prof. Dr. M. Hahn 07. November 2014 Mobile Mapping Kernelemente Messgeräte zur Positionsbestimmung
10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart M.Eng. Marius Ziegler Projektleiter: Prof. Dr. M. Hahn 07. November 2014 Mobile Mapping Kernelemente Messgeräte zur Positionsbestimmung
3. FORUM MOBILITÄT November 2014 in Berlin. Barrierefreie Navigation für Blinde und Sehbehinderte in öffentlichen Gebäuden
 3. FORUM MOBILITÄT 10. 11. November 2014 in Berlin Barrierefreie Navigation für Blinde und Sehbehinderte in öffentlichen Gebäuden Dr. Matthias Schmidt Fraunhofer FOKUS 1. m4guide - mobile multi-modal mobility
3. FORUM MOBILITÄT 10. 11. November 2014 in Berlin Barrierefreie Navigation für Blinde und Sehbehinderte in öffentlichen Gebäuden Dr. Matthias Schmidt Fraunhofer FOKUS 1. m4guide - mobile multi-modal mobility
Trackersysteme (Non Vision)
") Trackersysteme (Non Vision) Hauptseminar "Virtual and Augmented Reality 24.5.2004 Tracker Systeme Jürgen Pattis 1 Definition und Zweck von Tracking Def.: Ein Trackingsystem ist ein System, das einem Benutzer
Trackersysteme (Non Vision) Hauptseminar "Virtual and Augmented Reality 24.5.2004 Tracker Systeme Jürgen Pattis 1 Definition und Zweck von Tracking Def.: Ein Trackingsystem ist ein System, das einem Benutzer
Exploring subsurface GIS data with Handheld Outdoor Augmented Reality
 Exploring subsurface GIS data with Handheld Outdoor Augmented Reality Gerhard Schall Institut für Maschinelles Sehen und Darstellen Technische Universität Graz 1 Agenda Outdoor Augmented Reality Evolution
Exploring subsurface GIS data with Handheld Outdoor Augmented Reality Gerhard Schall Institut für Maschinelles Sehen und Darstellen Technische Universität Graz 1 Agenda Outdoor Augmented Reality Evolution
DIGITALISIERUNG IM TOURISMUS IN BAYERN
 DIGITALISIERUNG IM TOURISMUS IN BAYERN Bayerischer Tourismustag, 2. Dezember 2016, Augsburg Wolfgang Inninger, Leiter Projektzentrum Verkehr, Mobilität und Umwelt Fraunhofer Institut für Materialfluss
DIGITALISIERUNG IM TOURISMUS IN BAYERN Bayerischer Tourismustag, 2. Dezember 2016, Augsburg Wolfgang Inninger, Leiter Projektzentrum Verkehr, Mobilität und Umwelt Fraunhofer Institut für Materialfluss
Inertiale Navigationssysteme Eine Einführung
 Inertiale Navigationssysteme Eine Einführung SFB 67 Ringvorlesung SS 07 Stuttgart,. Juni 007 Jörg F. Wagner Institut für Statik und Dynamik der Luft- und Raumfahrtkonstruktionen Universität Stuttgart Jörg
Inertiale Navigationssysteme Eine Einführung SFB 67 Ringvorlesung SS 07 Stuttgart,. Juni 007 Jörg F. Wagner Institut für Statik und Dynamik der Luft- und Raumfahrtkonstruktionen Universität Stuttgart Jörg
Location Based Services
 18. Consens Herbsttagung Location Based Services Nominiert für Auf der Basis von CAFM Daten Ulrich Walder Univ.-Prof. Dipl. Ing. ETH Dr. techn. Technische Universität Graz / Walder + Trüeb Engineering
18. Consens Herbsttagung Location Based Services Nominiert für Auf der Basis von CAFM Daten Ulrich Walder Univ.-Prof. Dipl. Ing. ETH Dr. techn. Technische Universität Graz / Walder + Trüeb Engineering
zur Echtzeitvisualisierung unterirdischer Ver- und Entsorgungsinfrastruktur
 Vidente Vidente Ein Augemented-Reality Reality-System zur Echtzeitvisualisierung unterirdischer Ver- und Entsorgungsinfrastruktur S. Junghanns 1,2, E. Méndez 2 & D. Schmalstieg 2 1 GRINTEC GmbH, Graz 2
Vidente Vidente Ein Augemented-Reality Reality-System zur Echtzeitvisualisierung unterirdischer Ver- und Entsorgungsinfrastruktur S. Junghanns 1,2, E. Méndez 2 & D. Schmalstieg 2 1 GRINTEC GmbH, Graz 2
Galileo Möglichkeiten aus Sicht der Industrie. Galileo Vorbereitung auf künftige Märkte
 Möglichkeiten aus Sicht der Industrie Peter Loef Leiter ascos Satelliten Referenzdienst der E.ON Ruhrgas AG Vorbereitung auf künftige Märkte Informationsveranstaltung im Bundesministerium für Verkehr,
Möglichkeiten aus Sicht der Industrie Peter Loef Leiter ascos Satelliten Referenzdienst der E.ON Ruhrgas AG Vorbereitung auf künftige Märkte Informationsveranstaltung im Bundesministerium für Verkehr,
Bildflug - Navigation - HS BO Lab. für Photogrammetrie: Navigation 1
 Bildflug - Navigation - HS BO Lab. für Photogrammetrie: Navigation 1 Zielsetzung Direkte Messung der Position und Orientierung des airborne Sensors Notwendige Sensorik: GPS, IMU Zeitstempel: Position/
Bildflug - Navigation - HS BO Lab. für Photogrammetrie: Navigation 1 Zielsetzung Direkte Messung der Position und Orientierung des airborne Sensors Notwendige Sensorik: GPS, IMU Zeitstempel: Position/
Geo-Monitoring in der Zukunft. Andreas Wieser Institut für Geodäsie und Photogrammetrie, ETH Zürich
 Geo-Monitoring in der Zukunft Andreas Wieser Institut für Geodäsie und Photogrammetrie, ETH Zürich Registrierte Felssturzereignisse in Österreich Quelle: Sass O, Oberlechner M (2012) Is climate change
Geo-Monitoring in der Zukunft Andreas Wieser Institut für Geodäsie und Photogrammetrie, ETH Zürich Registrierte Felssturzereignisse in Österreich Quelle: Sass O, Oberlechner M (2012) Is climate change
Automatische Erkennung von Fortbewegungsmitteln AW2. Christian Wagner
 Automatische Erkennung von Fortbewegungsmitteln AW2 Christian Wagner 11.06.2009 Agenda Einführung ins Thema Ziel Ansätze Forschungsbereich: Sensor Fusion Projekte Techniken Einordnung der Arbeit Ziele
Automatische Erkennung von Fortbewegungsmitteln AW2 Christian Wagner 11.06.2009 Agenda Einführung ins Thema Ziel Ansätze Forschungsbereich: Sensor Fusion Projekte Techniken Einordnung der Arbeit Ziele
APOS Real Time- DGPS Echtzeitpositionierung mit Submeter - Genauigkeit. Ernst Zahn
 APOS Real Time- DGPS Echtzeitpositionierung mit Submeter - Genauigkeit Ernst Zahn Teilprodukt: APOS Real Time - DGPS APOS: Kurzvorstellung, Chronologie, Status Ergebnisse der DGPS-Testmessungen 2005 Zugang
APOS Real Time- DGPS Echtzeitpositionierung mit Submeter - Genauigkeit Ernst Zahn Teilprodukt: APOS Real Time - DGPS APOS: Kurzvorstellung, Chronologie, Status Ergebnisse der DGPS-Testmessungen 2005 Zugang
Einführung der Mixed Reality in der Landentwicklung und Flurneuordnung Maßstab und Raumbezug
 Einführung der Mixed Reality in der Landentwicklung und Flurneuordnung Maßstab und Raumbezug vlf Brandenburg Verband für Landentwicklung und Flurneuordnung Brandenburg Dr. Ulf Kreuziger Einführung / Gliederung
Einführung der Mixed Reality in der Landentwicklung und Flurneuordnung Maßstab und Raumbezug vlf Brandenburg Verband für Landentwicklung und Flurneuordnung Brandenburg Dr. Ulf Kreuziger Einführung / Gliederung
Auswertung von flugzeuggestützten GPS- Messungen für die Anwendung in der Fluggravimetrie
 Auswertung von flugzeuggestützten GPS- Messungen für die Anwendung in der Fluggravimetrie S. Balssen, U. Meyer, I. Heyde, C. Knöfel, M. Fritsche, R. Dietrich, M. Scheinert Geodätische Woche 2010 Köln,
Auswertung von flugzeuggestützten GPS- Messungen für die Anwendung in der Fluggravimetrie S. Balssen, U. Meyer, I. Heyde, C. Knöfel, M. Fritsche, R. Dietrich, M. Scheinert Geodätische Woche 2010 Köln,
Inertialmesssysteme zur Bewegungserfassung von Crashtest-Dummies
 - Inertialmesssysteme zur Bewegungserfassung von Dr.-Ing. Kai Schönebeck Quensys Electronic Systems GbR Gefördert durch: 2 Inertialmesstechnik - Grundlegende Funktionsweise - Sensortechnologien - saving-inertialmesssystem
- Inertialmesssysteme zur Bewegungserfassung von Dr.-Ing. Kai Schönebeck Quensys Electronic Systems GbR Gefördert durch: 2 Inertialmesstechnik - Grundlegende Funktionsweise - Sensortechnologien - saving-inertialmesssystem
Erster österreichischer Satellit
 Erster österreichischer Satellit M. Unterberger, O. Koudelka, B. Josseck, N. Valavanoglou, P. Schrotter, R. Finsterbusch 1 Inhalt Aufgaben der TUGSAT-1 / BRITE Austria Mission Beteiligte Partner Wissenschaftliche
Erster österreichischer Satellit M. Unterberger, O. Koudelka, B. Josseck, N. Valavanoglou, P. Schrotter, R. Finsterbusch 1 Inhalt Aufgaben der TUGSAT-1 / BRITE Austria Mission Beteiligte Partner Wissenschaftliche
Steigerung der Akzeptanz räumlicher Planungen durch freiwillig gesammelte Geodaten FOSSGIS-Vortrag
 Technologie Campus Freyung Steigerung der Akzeptanz räumlicher Planungen durch freiwillig gesammelte Geodaten FOSSGIS-Vortrag Prof. Dr. Roland Zink roland.zink@th-deg.de Stefan Küspert stefan.kuespert@th-deg.de
Technologie Campus Freyung Steigerung der Akzeptanz räumlicher Planungen durch freiwillig gesammelte Geodaten FOSSGIS-Vortrag Prof. Dr. Roland Zink roland.zink@th-deg.de Stefan Küspert stefan.kuespert@th-deg.de
Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL
 DLR.de Folie 1 03.03.2015, ASW 2016, Wildau Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL DLR.de Folie 2 Agenda
DLR.de Folie 1 03.03.2015, ASW 2016, Wildau Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL DLR.de Folie 2 Agenda
Mobile Augmented Reality
 Mobile Augmented Reality Semantische Bauwerksmodelle als Datengrundlage einer Smartphone-basierten Augmented Reality Anwendung RWTH Aachen University Geodätisches Institut Lehrstuhl für Bauinformatik &
Mobile Augmented Reality Semantische Bauwerksmodelle als Datengrundlage einer Smartphone-basierten Augmented Reality Anwendung RWTH Aachen University Geodätisches Institut Lehrstuhl für Bauinformatik &
11. VIMOS Tagung Technische Universität Dresden
 11. VIMOS Tagung Technische Universität Dresden Indoor Ortung und Navigation für die Führung von Fußgängern in Gebäuden des öffentlichen Verkehrs Olaf Czogalla ifak Magdeburg 26. November 2015 1 Einführung
11. VIMOS Tagung Technische Universität Dresden Indoor Ortung und Navigation für die Führung von Fußgängern in Gebäuden des öffentlichen Verkehrs Olaf Czogalla ifak Magdeburg 26. November 2015 1 Einführung
MEHR ZEIT UND GELD DURCH DIGITALISIERUNG?
 13. Februar 2019 9.00-15.30 Uhr MEHR ZEIT UND GELD DURCH DIGITALISIERUNG? Erfolgsgeschichten hören Technologien erleben Lösungen finden DIGITALE UNTERSTÜTZUNG FÜR DEN MITTELSTAND Vom Handel über das Geschäftsmodell
13. Februar 2019 9.00-15.30 Uhr MEHR ZEIT UND GELD DURCH DIGITALISIERUNG? Erfolgsgeschichten hören Technologien erleben Lösungen finden DIGITALE UNTERSTÜTZUNG FÜR DEN MITTELSTAND Vom Handel über das Geschäftsmodell
Mobil Arbeiten mit Smartphone & Tablet. Stephan Mallmann
 Mobil Arbeiten mit Smartphone & Tablet Stephan Mallmann @garyvee http://t3n.de/news/android-ueberholt-windows-811738/ http://t3n.de/news/android-ueberholt-windows-811738/ Das Zeitalter der Desktopcomputer
Mobil Arbeiten mit Smartphone & Tablet Stephan Mallmann @garyvee http://t3n.de/news/android-ueberholt-windows-811738/ http://t3n.de/news/android-ueberholt-windows-811738/ Das Zeitalter der Desktopcomputer
Positionsbestimmung im Weltraum mittels Distanzmessungen
 Positionsbestimmung im Weltraum mittels Distanzmessungen Andrea Maier Institut für Weltraumforschung Abteilung für Satellitengeodäsie Graz in Space 6.-7. September, 2012 1 / 23 Allgemein Was ist eine Position?
Positionsbestimmung im Weltraum mittels Distanzmessungen Andrea Maier Institut für Weltraumforschung Abteilung für Satellitengeodäsie Graz in Space 6.-7. September, 2012 1 / 23 Allgemein Was ist eine Position?

Exploring Mobility.
 Exploring Mobility »Möglichkeiten für Location- Based Services in komplexen Strukturen und Umgebungen am Beispiel Bluetooth Low Energy «ecom instruments GmbH Dietmar Deppisch Product Manager System Solutions
Exploring Mobility »Möglichkeiten für Location- Based Services in komplexen Strukturen und Umgebungen am Beispiel Bluetooth Low Energy «ecom instruments GmbH Dietmar Deppisch Product Manager System Solutions
GNSS in Geodäsie und Navigation
 GNSS in Geodäsie und Navigation Anwendungen und Beispiele aus dem Institut für Physikalische Geodäsie (IPGD) Stefan Leinen und Matthias Becker Hessische Auftakt-Veranstaltung European Satellite Navigation
GNSS in Geodäsie und Navigation Anwendungen und Beispiele aus dem Institut für Physikalische Geodäsie (IPGD) Stefan Leinen und Matthias Becker Hessische Auftakt-Veranstaltung European Satellite Navigation
Mobile Application Development
 Mobile Application Development Informationstreffen Lehrstuhl für Informatik 2 (Programmiersysteme) Übersicht Warum MAD? Es geht um Apps... Aber eben nicht nur um Apps... Organisatorisches Zusammenfassung
Mobile Application Development Informationstreffen Lehrstuhl für Informatik 2 (Programmiersysteme) Übersicht Warum MAD? Es geht um Apps... Aber eben nicht nur um Apps... Organisatorisches Zusammenfassung
Julian Dömer Head of Innovation 23. Oktober Das Netz der Zukunft
 Julian Dömer Head of Innovation. Oktober 08 Das Netz der Zukunft Für Video hier klicken 5G Wo stehen wir heute? Ersten Erfolgen bei Kunden folgt der baldige Launch in der Schweiz! Erste erfolgreiche Anwendung
Julian Dömer Head of Innovation. Oktober 08 Das Netz der Zukunft Für Video hier klicken 5G Wo stehen wir heute? Ersten Erfolgen bei Kunden folgt der baldige Launch in der Schweiz! Erste erfolgreiche Anwendung
Frühwarnsystem zur Beurteilung der Gefährdung kritischer Infrastruktur durch Hangrutschung. Projekt: GeoWSN
 Frühwarnsystem zur Beurteilung der Gefährdung kritischer Infrastruktur durch Hangrutschung Projekt: GeoWSN Daniel Koch Institut für Navigation Technische Universität Graz Grundgedanke Der Klimawandel verursacht
Frühwarnsystem zur Beurteilung der Gefährdung kritischer Infrastruktur durch Hangrutschung Projekt: GeoWSN Daniel Koch Institut für Navigation Technische Universität Graz Grundgedanke Der Klimawandel verursacht
Hybridortung Intelligente Verknüpfung von Indoor- und Outdoor-Positionierung für einen barrierefreien Übergang
 Hybridortung Intelligente Verknüpfung von Indoor- und Outdoor-Positionierung für einen barrierefreien Übergang Nico Radike 25.04.2012 OECON Products & Services GmbH OECON ist Ortungsspezialist - seit 1992
Hybridortung Intelligente Verknüpfung von Indoor- und Outdoor-Positionierung für einen barrierefreien Übergang Nico Radike 25.04.2012 OECON Products & Services GmbH OECON ist Ortungsspezialist - seit 1992
Eine Schnittstelle zur gekoppelten Simulation eines Trefftz-Elements mit LS-Dyna
 Eine Schnittstelle zur gekoppelten Simulation eines Trefftz-Elements mit LS-Dyna Johannes Hartmann, Karlheinz Kunter, Thomas Heubrandtner, Bernhard Fellner, Harald Schluder VIRTUAL VEHICLE 1/20 Eine Schnittstelle
Eine Schnittstelle zur gekoppelten Simulation eines Trefftz-Elements mit LS-Dyna Johannes Hartmann, Karlheinz Kunter, Thomas Heubrandtner, Bernhard Fellner, Harald Schluder VIRTUAL VEHICLE 1/20 Eine Schnittstelle
Praktikum und Projektarbeit in Kooperation mit der documedias GmbH. von Jan Hendrik Sarstedt IMIT im 6. Semester an der Universität Hildesheim
 Praktikum und Projektarbeit in Kooperation mit der documedias GmbH IMIT im 6. Semester an der Universität Hildesheim Inhalt 1. documedias 2. Praktikum a. Allgemein b. MapCoordinates 3. Projektarbeit a.
Praktikum und Projektarbeit in Kooperation mit der documedias GmbH IMIT im 6. Semester an der Universität Hildesheim Inhalt 1. documedias 2. Praktikum a. Allgemein b. MapCoordinates 3. Projektarbeit a.
Überblick Visual Computing: Teilbereiche & Anwendungsfelder
 Überblick Visual Computing: Teilbereiche & Anwendungsfelder Werner Purgathofer Institut für und Algorithmen TU Wien Interaktive Visuelle Analytik visuelle Analyse mehrdim. und abstrakter Daten Modellierung
Überblick Visual Computing: Teilbereiche & Anwendungsfelder Werner Purgathofer Institut für und Algorithmen TU Wien Interaktive Visuelle Analytik visuelle Analyse mehrdim. und abstrakter Daten Modellierung
Nutzung von virtuellen Stadtmodellen für neue Technologien
 Nutzung von virtuellen Stadtmodellen für neue Technologien Die Nutzung von Konzept Demonstratoren um neue Wege für die Mensch-Maschine-Schnittstelle zu finden Leonhard Vogelmeier 6 April 2017 Gliederung
Nutzung von virtuellen Stadtmodellen für neue Technologien Die Nutzung von Konzept Demonstratoren um neue Wege für die Mensch-Maschine-Schnittstelle zu finden Leonhard Vogelmeier 6 April 2017 Gliederung
DIE ZUKUNFT DES BAUENS BEGINNT JETZT. Unsere Lösungen
 DIE ZUKUNFT DES BAUENS BEGINNT JETZT. Unsere Lösungen Gestalten wir die Zukunft des Bauens! Sustainable & Highly Functional Materials Digital Real Estate Management Drones & 3D Scans Urban Greening Big
DIE ZUKUNFT DES BAUENS BEGINNT JETZT. Unsere Lösungen Gestalten wir die Zukunft des Bauens! Sustainable & Highly Functional Materials Digital Real Estate Management Drones & 3D Scans Urban Greening Big
Projekt INF. Sensorerweiterung für 3D-Drucker. Hanna Bader, Alexandros Fouskas, Cedric Holeczek, Paul Nehlich und Robin Schweigert
 Projekt INF Sensorerweiterung für 3D-Drucker Hanna Bader, Alexandros Fouskas, Cedric Holeczek, Paul Nehlich und Robin Schweigert Koordinator: Felix Baumann Prüfer: Prof. Dr. Dieter Roller Institut für
Projekt INF Sensorerweiterung für 3D-Drucker Hanna Bader, Alexandros Fouskas, Cedric Holeczek, Paul Nehlich und Robin Schweigert Koordinator: Felix Baumann Prüfer: Prof. Dr. Dieter Roller Institut für
Interaktion mit projizierten Benutzerschnittstellen. Franziska Meyer. Betreuer: Marc Langheinrich
 Interaktion mit projizierten Benutzerschnittstellen Franziska Meyer Betreuer: Marc Langheinrich Smarte Objekte und smarte Umgebungen Franziska Meyer - p. 1/16 Aufteilung Aufteilung Motivation 1. Franziska
Interaktion mit projizierten Benutzerschnittstellen Franziska Meyer Betreuer: Marc Langheinrich Smarte Objekte und smarte Umgebungen Franziska Meyer - p. 1/16 Aufteilung Aufteilung Motivation 1. Franziska
MOBILE SENSING ZUR U-BAHN-NAVIGATION UIS 2016 HTWK LEIPZIG
 MOBILE SENSING ZUR U-BAHN-NAVIGATION UIS 2016 HTWK LEIPZIG Matthias Heyde / Fraunhofer FOKUS Frank Fuchs-Kittowski & Daniel Faust, 2. Juni 2016 AGENDA 1. Einführung 2. Anwendungsszenario U-Bahn-Navigation
MOBILE SENSING ZUR U-BAHN-NAVIGATION UIS 2016 HTWK LEIPZIG Matthias Heyde / Fraunhofer FOKUS Frank Fuchs-Kittowski & Daniel Faust, 2. Juni 2016 AGENDA 1. Einführung 2. Anwendungsszenario U-Bahn-Navigation
Einfluss der räumlichen Punktverteilung beim Laserscanning auf die Parameterschätzung deformierter Flächen
 Einfluss der räumlichen Punktverteilung beim Laserscanning auf die Parameterschätzung deformierter Flächen 17. Internationaler Ingenieurvermessungskurs in Zürich Christoph Holst & Heiner Kuhlmann 17. Januar
Einfluss der räumlichen Punktverteilung beim Laserscanning auf die Parameterschätzung deformierter Flächen 17. Internationaler Ingenieurvermessungskurs in Zürich Christoph Holst & Heiner Kuhlmann 17. Januar
Smartphones. Sie verraten mehr, als man erwartet. Frederik Armknecht. Frederik Armknecht 1
 Smartphones Sie verraten mehr, als man erwartet Frederik Armknecht Frederik Armknecht 1 Agenda Sicherheitsrisiko Smartphone Sensoren in Smartphones Angriffe Neue Sicherheitslösungen Fazit Frederik Armknecht
Smartphones Sie verraten mehr, als man erwartet Frederik Armknecht Frederik Armknecht 1 Agenda Sicherheitsrisiko Smartphone Sensoren in Smartphones Angriffe Neue Sicherheitslösungen Fazit Frederik Armknecht
Moderne Vermessungsinstrumente: Von Richtungs- und Distanzmessern zu perfekten Koordinatenmessmaschinen? Johannes Schwarz Leica Geosystems
 Moderne Vermessungsinstrumente: Von Richtungs- und Distanzmessern zu perfekten Koordinatenmessmaschinen? Johannes Schwarz Leica Geosystems 16.11.2017 Vermessung zu meinen Kindheitszeiten. 2 «Alles messen»
Moderne Vermessungsinstrumente: Von Richtungs- und Distanzmessern zu perfekten Koordinatenmessmaschinen? Johannes Schwarz Leica Geosystems 16.11.2017 Vermessung zu meinen Kindheitszeiten. 2 «Alles messen»
Automatische Erkennung und Klassifikation von Körperhaltungen und Aktivitäten
 Automatische Erkennung und Klassifikation von Körperhaltungen und Aktivitäten Dipl.-Ing. Daniel Tantinger Fraunhofer Institut für Integrierte Schaltungen IIS, Erlangen, Deutschland Automatische Erkennung
Automatische Erkennung und Klassifikation von Körperhaltungen und Aktivitäten Dipl.-Ing. Daniel Tantinger Fraunhofer Institut für Integrierte Schaltungen IIS, Erlangen, Deutschland Automatische Erkennung
KUKA Aktiengesellschaft
 KUKA Aktiengesellschaft Herzlich Willkommen auf der Hauptversammlung 2018 in Augsburg 06. Juni 2018 Seite: 1 KUKA Aktiengesellschaft Hauptversammlung 2018 in Augsburg 06. Juni 2018 Seite: 2 KUKA Aktiengesellschaft
KUKA Aktiengesellschaft Herzlich Willkommen auf der Hauptversammlung 2018 in Augsburg 06. Juni 2018 Seite: 1 KUKA Aktiengesellschaft Hauptversammlung 2018 in Augsburg 06. Juni 2018 Seite: 2 KUKA Aktiengesellschaft
ZAF Pilotierung Animierte Raumdarstellung
 6. Ausbildungstag GIT Brandenburg Zentrale Aus- und Fortbildungsstätte der LGB (Landesvermessung und Geobasisinformation Brandenburg) ZAF Pilotierung Animierte Raumdarstellung ZAF Pilotierung Animierte
6. Ausbildungstag GIT Brandenburg Zentrale Aus- und Fortbildungsstätte der LGB (Landesvermessung und Geobasisinformation Brandenburg) ZAF Pilotierung Animierte Raumdarstellung ZAF Pilotierung Animierte
Entwicklung eines Navigationssystems für ein autonomes Modellfahrzeug
 1 Bachelorarbeit - Verteidigung Entwicklung eines Navigationssystems für ein autonomes Modellfahrzeug Martin Hünermund 2 Gliederung 1. Motivation 2. Problemstellung 3. Konzept 4. Sensoranalyse 5. System-Entwurf
1 Bachelorarbeit - Verteidigung Entwicklung eines Navigationssystems für ein autonomes Modellfahrzeug Martin Hünermund 2 Gliederung 1. Motivation 2. Problemstellung 3. Konzept 4. Sensoranalyse 5. System-Entwurf
Augmented Reality. Martin Straumann, Business Unit Leiter Mobile Solutions
 Augmented Reality Martin Straumann, Business Unit Leiter Mobile Solutions Agenda Einführung in die Mobile-Welt Marktanalyse Datenbrillen in der Praxis Interview mit Edwin Bütikofer, Sage Schweiz AG Demo
Augmented Reality Martin Straumann, Business Unit Leiter Mobile Solutions Agenda Einführung in die Mobile-Welt Marktanalyse Datenbrillen in der Praxis Interview mit Edwin Bütikofer, Sage Schweiz AG Demo
Digitalisierung in der Bahninfrastruktur am Beispiel der Positionierung. ÖBB-Infrastruktur AG // GB SAE // Stab LCI
 Digitalisierung in der Bahninfrastruktur am Beispiel der Positionierung Dr. Michaela Haberler-Weber 21.6.2018 ÖBB-Infrastruktur AG Agenda Schwerpunkt 1: Mobile Mapping Schwerpunkt 2: Zugpositionierung
Digitalisierung in der Bahninfrastruktur am Beispiel der Positionierung Dr. Michaela Haberler-Weber 21.6.2018 ÖBB-Infrastruktur AG Agenda Schwerpunkt 1: Mobile Mapping Schwerpunkt 2: Zugpositionierung
Eine Glasfaser als Sensorelement: Entwicklung eines faseroptischen Zweiachs-Neigungssensors
 Quelle: Herold Schladming? β Eine Glasfaser als Sensorelement: Entwicklung eines faseroptischen Zweiachs-Neigungssensors Klaus MACHEINER [2009-10-07-FO-TM-OGT-2009-MKM.ppt] 1 Neigungsmessung: Anwendungen
Quelle: Herold Schladming? β Eine Glasfaser als Sensorelement: Entwicklung eines faseroptischen Zweiachs-Neigungssensors Klaus MACHEINER [2009-10-07-FO-TM-OGT-2009-MKM.ppt] 1 Neigungsmessung: Anwendungen
Präzise Positions- und Orientierungsbestimmung eines UAVs in Echtzeit
 Geodätische Woche 08.-10. Oktober 2013 Präzise Positions- und Orientierungsbestimmung eines UAVs in Echtzeit Christian Eling, Lasse Klingbeil, Markus Wieland und Heiner Kuhlmann 08.10.2013 Inhaltsverzeichnis
Geodätische Woche 08.-10. Oktober 2013 Präzise Positions- und Orientierungsbestimmung eines UAVs in Echtzeit Christian Eling, Lasse Klingbeil, Markus Wieland und Heiner Kuhlmann 08.10.2013 Inhaltsverzeichnis
Heterogene Multirobotersysteme zur Aufklärung in unbekanntem Gelände
 Heterogene Multirobotersysteme zur Aufklärung in unbekanntem Gelände Zur Erlangung des akademischen Grades eines Doktor-Ingenieurs von der Fakultät für Elektrotechnik und Informationstechnik des Karlsruher
Heterogene Multirobotersysteme zur Aufklärung in unbekanntem Gelände Zur Erlangung des akademischen Grades eines Doktor-Ingenieurs von der Fakultät für Elektrotechnik und Informationstechnik des Karlsruher
DER GLÄSERNE KUNDE LOKALISATION MIT RFID. Dr. Dietmar Bräuer
 DER GLÄSERNE KUNDE LOKALISATION MIT RFID Dr. Dietmar Bräuer - 2017 AGENDA Ausgangslage Methoden der Lokalisation Technische Umsetzung Herausforderungen Grenzen der Lokalisation Gefahren WELCHE STANDORTDIENSTE
DER GLÄSERNE KUNDE LOKALISATION MIT RFID Dr. Dietmar Bräuer - 2017 AGENDA Ausgangslage Methoden der Lokalisation Technische Umsetzung Herausforderungen Grenzen der Lokalisation Gefahren WELCHE STANDORTDIENSTE
GNSS Empfänger in der Vermessung und der Nutzen von GNSS Modernisierung
 GNSS Empfänger in der Vermessung und der Nutzen von GNSS Modernisierung Bernhard Richter, GNSS Business Direktor 11, Oktober 2016 Teil von GNSS Modernisierung seit 1990 Erst jetzt zeigt BeiDou und Galileo
GNSS Empfänger in der Vermessung und der Nutzen von GNSS Modernisierung Bernhard Richter, GNSS Business Direktor 11, Oktober 2016 Teil von GNSS Modernisierung seit 1990 Erst jetzt zeigt BeiDou und Galileo
Ein topologischer Ansatz zur Innenraumnavigation mit MEMS in Smartphones basierend auf dem Routing-Graph
 1 Ein topologischer Ansatz zur Innenraumnavigation mit MEMS in Smartphones basierend auf dem Routing-Graph Harald STERNBERG und Thomas WILLEMSEN HafenCity Universität Hamburg vorname.nachname@hcu-hamburg.de
1 Ein topologischer Ansatz zur Innenraumnavigation mit MEMS in Smartphones basierend auf dem Routing-Graph Harald STERNBERG und Thomas WILLEMSEN HafenCity Universität Hamburg vorname.nachname@hcu-hamburg.de
Interaktion mit ubiquitären Umgebungen
 Interaktion mit ubiquitären Umgebungen Mathias Walker 4. Juni 2002 Fachseminar Verteilte Systeme Betreuer: Michael Rohs Dozent: Prof. Dr. F. Mattern Inhalt Ubiquitäre Umgebung Technische Anforderungen
Interaktion mit ubiquitären Umgebungen Mathias Walker 4. Juni 2002 Fachseminar Verteilte Systeme Betreuer: Michael Rohs Dozent: Prof. Dr. F. Mattern Inhalt Ubiquitäre Umgebung Technische Anforderungen
Precise Point Positioning (PPP) in Hinblick auf Echtzeitanwendungen
 in Hinblick auf Echtzeitanwendungen") Katrin Huber Institut für Navigation Technische Universität Graz katrin.huber@tugraz.at Precise Point Positioning (PPP) in Hinblick auf Echtzeitanwendungen 8. November 0 Übersicht PPP Grundlagen INAS PPP
Katrin Huber Institut für Navigation Technische Universität Graz katrin.huber@tugraz.at Precise Point Positioning (PPP) in Hinblick auf Echtzeitanwendungen 8. November 0 Übersicht PPP Grundlagen INAS PPP
Vernetzte Gebäudereinigung Umsetzung eines IoT-fähigen Reinigungswagens
 Embedded & Software Engineering technik.mensch.leidenschaft Vernetzte Gebäudereinigung Umsetzung eines IoT-fähigen Reinigungswagens 8. März 2018 DIN EN ISO 9001 WG1 Elemente des Reinigungswagens 2011 2018
Embedded & Software Engineering technik.mensch.leidenschaft Vernetzte Gebäudereinigung Umsetzung eines IoT-fähigen Reinigungswagens 8. März 2018 DIN EN ISO 9001 WG1 Elemente des Reinigungswagens 2011 2018
MARKERLESS AUGMENTED REALITY. Henrik Brauer
 MARKERLESS AUGMENTED REALITY Henrik Brauer Inhalt Was ist Augmented Reality Meine Motivation Grundlagen Positionsbestimmung mit Marker Positionsbestimmung ohne Marker Idee Risiken INHALT Augmented Reality
MARKERLESS AUGMENTED REALITY Henrik Brauer Inhalt Was ist Augmented Reality Meine Motivation Grundlagen Positionsbestimmung mit Marker Positionsbestimmung ohne Marker Idee Risiken INHALT Augmented Reality
ANWENDUNGSSZENARIEN UND REFERENZARCHITEKTUR IN DER INDUSTRIE 4.0 ESK
 ANWENDUNGSSZENARIEN UND REFERENZARCHITEKTUR IN DER INDUSTRIE 4.0 ESK IT2Industry, München, 11. November 2015 Fraunhofer-Institut für Eingebettete Systeme und Kommunikationstechnik ESK Prof. Dr.-Ing. Rudi
ANWENDUNGSSZENARIEN UND REFERENZARCHITEKTUR IN DER INDUSTRIE 4.0 ESK IT2Industry, München, 11. November 2015 Fraunhofer-Institut für Eingebettete Systeme und Kommunikationstechnik ESK Prof. Dr.-Ing. Rudi
Arbeiten 4.0 Chancen und Risiken für den Arbeitsschutz
 Arbeiten 4.0 Chancen und Risiken für den Arbeitsschutz Prof. Dr. Dietmar Reinert Direktor des Instituts für Arbeitsschutz der DGUV Institut für Arbeitsschutz der Deutschen Gesetzlichen Unfallversicherung
Arbeiten 4.0 Chancen und Risiken für den Arbeitsschutz Prof. Dr. Dietmar Reinert Direktor des Instituts für Arbeitsschutz der DGUV Institut für Arbeitsschutz der Deutschen Gesetzlichen Unfallversicherung
6. KIRAS Fachtagung 18. Oktober 2016, Wien. RelCon. Reliable Control of Semi-Autonomous Platforms
 6. KIRAS Fachtagung 18. Oktober 2016, Wien Reliable Control of Semi-Autonomous Platforms Verlässliche Führung semi-autonomer Fahrzeuge Förderprogramm: KIRAS Fördergeber: BMVIT / FFG Budget: Gesamt: ca.
6. KIRAS Fachtagung 18. Oktober 2016, Wien Reliable Control of Semi-Autonomous Platforms Verlässliche Führung semi-autonomer Fahrzeuge Förderprogramm: KIRAS Fördergeber: BMVIT / FFG Budget: Gesamt: ca.
Zur Georeferenzierung von UAV Bildflügen: direkt oder indirekt, was braucht man dafür? Lasse Klingbeil Christian Eling Heiner Kuhlmann
 Zur Georeferenzierung von UAV Bildflügen: direkt oder indirekt, was braucht man dafür? Lasse Klingbeil Christian Eling Heiner Kuhlmann Institut für Geodäsie und Geoinformation Rheinische Friedrich-Wilhelms-Universität
Zur Georeferenzierung von UAV Bildflügen: direkt oder indirekt, was braucht man dafür? Lasse Klingbeil Christian Eling Heiner Kuhlmann Institut für Geodäsie und Geoinformation Rheinische Friedrich-Wilhelms-Universität
MEDITHENA. Mobile Erfassung, Diagnose und Therapie, von Nackenschmerzen im Alltag. Perspectives 4 You
 MEDITHENA Mobile Erfassung, Diagnose und Therapie, von Nackenschmerzen im Alltag Perspectives 4 You Zertifiziert nach DIN EN ISO 9001:2015 Motivation Behandlung beim Arzt/Therapeuten Funktionsfragebögen
MEDITHENA Mobile Erfassung, Diagnose und Therapie, von Nackenschmerzen im Alltag Perspectives 4 You Zertifiziert nach DIN EN ISO 9001:2015 Motivation Behandlung beim Arzt/Therapeuten Funktionsfragebögen
Effektives Datenmanagement im Straßenverkehrswesen. GEOforum Leipzig Dipl.-Ing. Thilo Jung GEO Net solution GmbH NETZWERK STRASSE
 Effektives Datenmanagement im Straßenverkehrswesen GEOforum Leipzig 13.06.2006 Dipl.-Ing. Thilo Jung GEO Net solution GmbH Datenmanagement im Straßenverkehrswesen Prozessketten Wirtschaftlichkeit Vorplanung
Effektives Datenmanagement im Straßenverkehrswesen GEOforum Leipzig 13.06.2006 Dipl.-Ing. Thilo Jung GEO Net solution GmbH Datenmanagement im Straßenverkehrswesen Prozessketten Wirtschaftlichkeit Vorplanung
3D Goes Mobile. Verarbeitung von semantischen 3D- Gebäudemodellen auf Smartphones. Christoph Blut
 3D Goes Mobile Verarbeitung von semantischen 3D- Gebäudemodellen auf Smartphones RWTH Aachen University Geodätisches Institut Lehrstuhl für Bauinformatik & Geoinformationssysteme INHALT MOTIVATION MOBILE
3D Goes Mobile Verarbeitung von semantischen 3D- Gebäudemodellen auf Smartphones RWTH Aachen University Geodätisches Institut Lehrstuhl für Bauinformatik & Geoinformationssysteme INHALT MOTIVATION MOBILE
- Anwendungen, Möglichkeiten und Grenzen
 Sensor Web Dienste - Anwendungen, Möglichkeiten und Grenzen www.dlz-it.de Fachtagung Umweltmessnetze Birkenfeld Dipl.-Ing.(BA) Roman Klipp 22.09.2011 Seite 1 DLZ-IT BMVBS Vorstellung Dienststelle Ilmenau,
Sensor Web Dienste - Anwendungen, Möglichkeiten und Grenzen www.dlz-it.de Fachtagung Umweltmessnetze Birkenfeld Dipl.-Ing.(BA) Roman Klipp 22.09.2011 Seite 1 DLZ-IT BMVBS Vorstellung Dienststelle Ilmenau,
Analyse und Konzeptionen von Lösungen für das Verdeckungsproblem in komponentenbasierten Mixed Reality- Applikationen
 Analyse und Konzeptionen von Lösungen für das Verdeckungsproblem in komponentenbasierten Mixed Reality- Applikationen Vortrag zur Diplomarbeit von Sönke Dirksen am Professur für Graphische Datenverarbeitung
Analyse und Konzeptionen von Lösungen für das Verdeckungsproblem in komponentenbasierten Mixed Reality- Applikationen Vortrag zur Diplomarbeit von Sönke Dirksen am Professur für Graphische Datenverarbeitung
Das Place Lab Projekt
 Das Place Lab Projekt Mobile Business Seminar Lehrstuhl für Praktische Informatik IV Prof. Dr. Wolfgang Effelsberg Betreuer: Thomas King dkoelsch@rumms.uni-mannheim.de Seminar Mobile-Business 21.12.2005
Das Place Lab Projekt Mobile Business Seminar Lehrstuhl für Praktische Informatik IV Prof. Dr. Wolfgang Effelsberg Betreuer: Thomas King dkoelsch@rumms.uni-mannheim.de Seminar Mobile-Business 21.12.2005
Voneinander lernen in digitalen Arbeitswelten
 Voneinander lernen in digitalen Arbeitswelten Unterstützungsangebote des Projektes Industrie 4.0 für den Mittelstand Thore Arendt, OstWestfalenLippe GmbH Quelle: BMWI / www.digitale-technologien.de it
Voneinander lernen in digitalen Arbeitswelten Unterstützungsangebote des Projektes Industrie 4.0 für den Mittelstand Thore Arendt, OstWestfalenLippe GmbH Quelle: BMWI / www.digitale-technologien.de it
GPS - Aktueller Stand und künftige Potentiale
 armasuisse Bundesamt für Landestopografie swisstopo Bereich GPS - Aktueller Stand und künftige Potentiale Informationstagung Landtechnik 2009 13. Oktober 2009, Tänikon U. Wild Agenda Satellitensysteme
armasuisse Bundesamt für Landestopografie swisstopo Bereich GPS - Aktueller Stand und künftige Potentiale Informationstagung Landtechnik 2009 13. Oktober 2009, Tänikon U. Wild Agenda Satellitensysteme
GNSS Empfänger in einem dynamischen Geschäftsumfeld
 GNSS Empfänger in einem dynamischen Geschäftsumfeld Bernhard Richter, GNSS Programmdirektor, Leica Geosystems AG 19. Jänner 2017 Teil von Glonass 30 25 Number of GNSS satellites 20 15 10 GLONASS 5 0 Vollausbau
GNSS Empfänger in einem dynamischen Geschäftsumfeld Bernhard Richter, GNSS Programmdirektor, Leica Geosystems AG 19. Jänner 2017 Teil von Glonass 30 25 Number of GNSS satellites 20 15 10 GLONASS 5 0 Vollausbau
Erfassung untertägiger Hohlräume mit dem IPS-System bei der RAG Aktiengesellschaft Volker Spreckels, Andreas Schlienkamp
 Erfassung untertägiger Hohlräume mit dem IPS-System bei der Volker Spreckels, Andreas Schlienkamp IPS - Forschung und Entwicklung (FuE) Bei DLR entwickelt für Indoor-Navigation IPS = Integrated Positioning
Erfassung untertägiger Hohlräume mit dem IPS-System bei der Volker Spreckels, Andreas Schlienkamp IPS - Forschung und Entwicklung (FuE) Bei DLR entwickelt für Indoor-Navigation IPS = Integrated Positioning
Anwendung von VR/AR im Bereich Mensch-Roboter-Kollaboration
 Anwendung von VR/AR im Bereich Mensch-Roboter-Kollaboration 1. VR/AR in der Robotik 2. Mensch-Roboter-Kollaboration in der Montage Einsatz von Robotern bei KUKA 3. Schulung von Mitarbeitern für MRK 4.
Anwendung von VR/AR im Bereich Mensch-Roboter-Kollaboration 1. VR/AR in der Robotik 2. Mensch-Roboter-Kollaboration in der Montage Einsatz von Robotern bei KUKA 3. Schulung von Mitarbeitern für MRK 4.