GNSS/IMU Integration für die präzise Bestimmung einer Flugtrajektorie
|
|
|
- Walter Roth
- vor 6 Jahren
- Abrufe
Transkript
1 GNSS/IMU Integration für die präzise Bestimmung einer Flugtrajektorie Fabian Hinterberger Institut für Geodäsie und Geophysik, Tu Wien 18. Nov. 2011
2 1 Motivation
3 Motivation Gegenüberstellung Eigenschaften Satellitennavigation Trägheitsnavigation Positionsbestimmung absolut relativ Orientierungsbestimmung unzureichend genau Datenrate niedrig hoch Kurzzeitstabilität gering hoch Langzeitstabilität hoch gering Verfügbarkeit beschränkt unbegrenzt 2 Sehr unterschiedliche Eigenschaften Kombination beider Messsysteme



4 Motivation Integrierte bordautonome und bodengestützte Georeferenzierung für luftgestützte Multisensorsysteme mit cm-genauigkeit 3
5 Zielsetzung Transparente Entwicklung eines Kalmanfilters Verknüpfung auf Ergebnisebene (lose Kopplung) Geforderte Genauigkeit: Position: wenige cm Orientierung im Raum: wenige mgon Vergleich mit der Waypoint-Software Lösung Auswirkung systematischer Fehler der IMU 4
6 GNSS/IMU Integration Prinzip der losen Kopplung IMU Navigations Computer R b l Kalman Filter GNSS receiver GNSS Auswertung 5


7 GNSS/IMU Integration Instrumentierung 6
8 GNSS/IMU Integration Eigenschaften von GNSS Absolute Positionsbestimmung Niedrige Datenrate Orientierungsbestimmung unzureichend Benötigt min. 4 bzw. 5 Satelliten PR S R = ρ S S R + Δρ R,Ion S + Δρ R,Trop S + Δρ R,Rel S + Δρ R,Orb + c Δt R Δt S S + ε R Auswertungsstrategie Relative kinematische Bestimmung Zwei GNSS Empfänger notwendig Topcon Legacy E (5 Hz) Auswertungssoftware: Waypoint 7

 l + Ω el v l + g l imar INAV-FJI-AIRSURV-001-Q")
9 GNSS/IMU Integration 8 Eigenschaften einer IMU Relative Positionsbestimmung Hohe Datenrate Genaue Orientierungsbestimmung Gemessene Größen: f b b, Ω ib Gesuchte Größen: r l, v l l, R b Navigationsgleichungen r e = D 1 v l v l = R b l f b R b l = R l b (Ω b ib l 2Ω ie Ω b il ) l + Ω el v l + g l imar INAV-FJI-AIRSURV-001-Q Abtastrate: 1000 Hz
10 GNSS/IMU Integration Lösen der Navigationsgleichung 9
11 GNSS/IMU Integration Vergleich der beiden Lösungen 10
12 GNSS/IMU Integration Prinzip der losen Kopplung IMU Navigations Computer R b l Kalman Filter GNSS receiver GNSS Auswertung 11
13 GNSS/IMU Integration Grundlagen Kalmanfilterung Schätzung zeitlich veränderlicher Größen (Zustandsvektor) Dynamisches Modell: x k+1 = Θ k x k + Γ k w k Funktionales Modell: z k = H k x k + v k Nichtlineares Systemmodell extended Kalmanfilter Schätzung der Abweichung zu einer Referenz (IMU) 9 Zustandsgrößen δr e = F r r δr e + F r v δv l δv l = F v r δr e + F v v δv l + ε l f l + δg l ε l = F ε r δr e + F ε v δv l l ω il ε l 12 Messgröße: Differenz zwischen IMU- und GNSS-Trajektorie
 P k = (I K k H k )P k")
14 GNSS/IMU Integration Konzept des Kalmanfilters Initialisierung Prädiktion x k+1 = Φ k x k P k+1 = Φ k P k Φ k T + Q k Update x k = x k + K k (z k H k x k ) P k = (I K k H k )P k 13
15 Ergebnis 9 Zustandsgrößen Differenz zwischen TU- und Waypoint-Lösung Position Orientierung 14
16 Erweiterung Systemmodell Vergleich zwischen Waypoint- und TU-Lösung Abweichungen im dm bzw. Zentigon-Bereich Ursache: nicht berücksichtigte systematische Fehler der IMU Residualer Bias Skalierungsfaktoren Ausrichtungsfehler der Achsen Erweiterung des Systemmodels um Sensorfehler 21 Zustandsgrößen Bias als Random Walk Skalierungsfaktor als Random Constant δr e = F r r δr e + F r v δv l 15 δv l = F v r δr e + F v v δv l + ε l f l + δg l + R b l δb f + R b l diag(f b )δκ f ε l = F ε r δr e + F ε v δv l ω l il ε l R b l δb ω + R b l diag(ω b )δκ ω

17 Ergebnis 21 Zustandsgrößen Differenz zwischen TU- und Waypoint-Lösung Position Orientierung 16
18 Erweiterung Systemmodell Vergleich zwischen Waypoint- und TU-Lösung Abweichungen im cm- bzw. Zentigon-Bereich Differenzen in der Position um Faktor 10 geringer Keine deutliche Verbesserung der Orientierung Mögliche Ursachen Unterschiedliche Modellierung der Fehler Genauigkeit der Waypointlösung 17
19 Zusammenfassung Zusammenfassung Verknüpfung der Systeme auf Basis einer losen Kopplung Getrennte Auswertung GNSS und IMU Verknüpfung der Ergebnisse mit Kalmanfilter Differenzen zu Waypoint im dm- bzw. Zentigon-Bereich Modellierung der Sensorfehler ist notwendig für cm-genauigkeit Bias als Random Walk Scalefactor als Random Constant Differenzen zu Waypoint im cm- bzw. Zentigon-Bereich Unterschiede zwischen Lösungen basieren wahrscheinlich auf unterschiedlicher Modellierung der Sensorfehler 18
20 Vielen Dank für ihre Aufmerksamkeit
Weitere Aspekte zur Kalibrierung von GNSS Systemen
 Weitere Aspekte zur Kalibrierung von GNSS Systemen Gerhard Wübbena Martin Schmitz Geo++ Gesellschaft für satellitengestützte geodätische und navigatorische Technologien mbh D 30827 Garbsen, Germany http://www.geopp.de
Weitere Aspekte zur Kalibrierung von GNSS Systemen Gerhard Wübbena Martin Schmitz Geo++ Gesellschaft für satellitengestützte geodätische und navigatorische Technologien mbh D 30827 Garbsen, Germany http://www.geopp.de
Navigation von RPAS Ahorn 2014 Graz. Markus Dorn Institut für Navigation Nawi Graz, Technische Universität Graz
 Navigation von RPAS Ahorn 214 Graz Markus Dorn Institut für Navigation Nawi Graz, Technische Universität Graz markus.dorn@tugraz.at Einleitung OMOSA (Open Modular/Open Source Avionics Architecture for
Navigation von RPAS Ahorn 214 Graz Markus Dorn Institut für Navigation Nawi Graz, Technische Universität Graz markus.dorn@tugraz.at Einleitung OMOSA (Open Modular/Open Source Avionics Architecture for
Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL
 DLR.de Folie 1 03.03.2015, ASW 2016, Wildau Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL DLR.de Folie 2 Agenda
DLR.de Folie 1 03.03.2015, ASW 2016, Wildau Automatische Kalibrierung eines Kamerasystems zur Verkehrsdatenerfassung auf Basis von Navigationssensorik Sebastian Schulz, DLR-TS-ANL DLR.de Folie 2 Agenda
Empfängeruhrmodellierung in GNSS: Auswirkungen und Realisierbarkeit
 Empfängeruhrmodellierung in GNSS: Auswirkungen und Realisierbarkeit i it Ulrich Weinbach, ib Steffen Schön Institut für Erdmessung Motivation GNSS sind Einweg-Messverfahren. Problem der Zeitsynchronisation
Empfängeruhrmodellierung in GNSS: Auswirkungen und Realisierbarkeit i it Ulrich Weinbach, ib Steffen Schön Institut für Erdmessung Motivation GNSS sind Einweg-Messverfahren. Problem der Zeitsynchronisation
Multi-GNSS Software-Empfänger für integrierte Navigationssysteme in schwierigen Empfangsbedingungen
 Multi-GNSS Software-Empfänger für integrierte Navigationssysteme in schwierigen Empfangsbedingungen Zur Erlangung des akademischen Grades eines Doktor-Ingenieurs von der Fakultät für Elektrotechnik und
Multi-GNSS Software-Empfänger für integrierte Navigationssysteme in schwierigen Empfangsbedingungen Zur Erlangung des akademischen Grades eines Doktor-Ingenieurs von der Fakultät für Elektrotechnik und
Quadrocopters and it s Applications: Overview of State of the Art Techniques
 : Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
: Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
Geo-Monitoring in der Zukunft. Andreas Wieser Institut für Geodäsie und Photogrammetrie, ETH Zürich
 Geo-Monitoring in der Zukunft Andreas Wieser Institut für Geodäsie und Photogrammetrie, ETH Zürich Registrierte Felssturzereignisse in Österreich Quelle: Sass O, Oberlechner M (2012) Is climate change
Geo-Monitoring in der Zukunft Andreas Wieser Institut für Geodäsie und Photogrammetrie, ETH Zürich Registrierte Felssturzereignisse in Österreich Quelle: Sass O, Oberlechner M (2012) Is climate change
GNSS in Geodäsie und Navigation
 GNSS in Geodäsie und Navigation Anwendungen und Beispiele aus dem Institut für Physikalische Geodäsie (IPGD) Stefan Leinen und Matthias Becker Hessische Auftakt-Veranstaltung European Satellite Navigation
GNSS in Geodäsie und Navigation Anwendungen und Beispiele aus dem Institut für Physikalische Geodäsie (IPGD) Stefan Leinen und Matthias Becker Hessische Auftakt-Veranstaltung European Satellite Navigation
Praktikum I PP Physikalisches Pendel
 Praktikum I PP Physikalisches Pendel Hanno Rein Betreuer: Heiko Eitel 16. November 2003 1 Ziel der Versuchsreihe In der Physik lassen sich viele Vorgänge mit Hilfe von Schwingungen beschreiben. Die klassische
Praktikum I PP Physikalisches Pendel Hanno Rein Betreuer: Heiko Eitel 16. November 2003 1 Ziel der Versuchsreihe In der Physik lassen sich viele Vorgänge mit Hilfe von Schwingungen beschreiben. Die klassische
Analyse von zeitlichen Variationen bei unregelmäßig vorliegenden räumlichen Daten
 . Analyse von zeitlichen Variationen bei unregelmäßig vorliegenden räumlichen Daten Geodätische Woche 2010 1 Andreas Ernst und Wolf-Dieter Schuh 7. Oktober 2010 Motivation Räumliche Daten entstehen inzwischen
. Analyse von zeitlichen Variationen bei unregelmäßig vorliegenden räumlichen Daten Geodätische Woche 2010 1 Andreas Ernst und Wolf-Dieter Schuh 7. Oktober 2010 Motivation Räumliche Daten entstehen inzwischen
Precise Point Positioning (PPP) in Hinblick auf Echtzeitanwendungen
 in Hinblick auf Echtzeitanwendungen") Katrin Huber Institut für Navigation Technische Universität Graz katrin.huber@tugraz.at Precise Point Positioning (PPP) in Hinblick auf Echtzeitanwendungen 8. November 0 Übersicht PPP Grundlagen INAS PPP
Katrin Huber Institut für Navigation Technische Universität Graz katrin.huber@tugraz.at Precise Point Positioning (PPP) in Hinblick auf Echtzeitanwendungen 8. November 0 Übersicht PPP Grundlagen INAS PPP
MATLAB im Studium. Analyse niederfrequenter Magnetfeldsignale in eingebetteten Algorithmen. Claudia Beyß. Datum:
 MATLAB im Studium Analyse niederfrequenter Magnetfeldsignale in eingebetteten Algorithmen Datum: 16.10.2014 Claudia Beyß MATLAB in Höhere Regelungstechnik MATLAB in Sensortechnik & Datenverarbeitung MATLAB
MATLAB im Studium Analyse niederfrequenter Magnetfeldsignale in eingebetteten Algorithmen Datum: 16.10.2014 Claudia Beyß MATLAB in Höhere Regelungstechnik MATLAB in Sensortechnik & Datenverarbeitung MATLAB
Improving the Accuracy of GPS
 Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Die broadcast-ephemeriden der vier GNSS im Qualitätsvergleich
 Fakultät Umweltwissenschaften, Fachrichtung Geowissenschaften, Geodätisches Institut Susanne Beer Hael Sumaya Lambert Wanninger Motivation derzeit 4 GNSS, mit denen einzeln oder kombiniert Positionsbestimmungen
Fakultät Umweltwissenschaften, Fachrichtung Geowissenschaften, Geodätisches Institut Susanne Beer Hael Sumaya Lambert Wanninger Motivation derzeit 4 GNSS, mit denen einzeln oder kombiniert Positionsbestimmungen
Auswertung von flugzeuggestützten GPS- Messungen für die Anwendung in der Fluggravimetrie
 Auswertung von flugzeuggestützten GPS- Messungen für die Anwendung in der Fluggravimetrie S. Balssen, U. Meyer, I. Heyde, C. Knöfel, M. Fritsche, R. Dietrich, M. Scheinert Geodätische Woche 2010 Köln,
Auswertung von flugzeuggestützten GPS- Messungen für die Anwendung in der Fluggravimetrie S. Balssen, U. Meyer, I. Heyde, C. Knöfel, M. Fritsche, R. Dietrich, M. Scheinert Geodätische Woche 2010 Köln,
Präzise Einfrequenz-Positionierung mit dem Galileo E5 Breitbandsignal
 Präzise Einfrequenz-Positionierung mit dem Galileo E5 Breitbandsignal Geodätische Woche 2011 / InterGEO Nürnberg 28. September 2011 Ing. habil. Torben Schüler Stefan Junker Herman Diessongo Prof. Dr.-Ing.
Präzise Einfrequenz-Positionierung mit dem Galileo E5 Breitbandsignal Geodätische Woche 2011 / InterGEO Nürnberg 28. September 2011 Ing. habil. Torben Schüler Stefan Junker Herman Diessongo Prof. Dr.-Ing.
Ist Collaborative Positioning eine geeignete Lösung bei GNSS Beeinträchtigungen?
 Symposium St. Ulrich bei Steyr Ist Collaborative Positioning eine geeignete Lösung bei GNSS Beeinträchtigungen? Guenther Retscher Department Geodäsie und Geoinformation, FG Ingenieurgeodäsie Technische
Symposium St. Ulrich bei Steyr Ist Collaborative Positioning eine geeignete Lösung bei GNSS Beeinträchtigungen? Guenther Retscher Department Geodäsie und Geoinformation, FG Ingenieurgeodäsie Technische
κ Κα π Κ α α Κ Α
 κ Κα π Κ α α Κ Α Ζ Μ Κ κ Ε Φ π Α Γ Κ Μ Ν Ξ λ Γ Ξ Ν Μ Ν Ξ Ξ Τ κ ζ Ν Ν ψ Υ α α α Κ α π α ψ Κ α α α α α Α Κ Ε α α α α α α α Α α α α α η Ε α α α Ξ α α Γ Α Κ Κ Κ Ε λ Ε Ν Ε θ Ξ κ Ε Ν Κ Μ Ν Τ μ Υ Γ φ Ε Κ Τ θ
κ Κα π Κ α α Κ Α Ζ Μ Κ κ Ε Φ π Α Γ Κ Μ Ν Ξ λ Γ Ξ Ν Μ Ν Ξ Ξ Τ κ ζ Ν Ν ψ Υ α α α Κ α π α ψ Κ α α α α α Α Κ Ε α α α α α α α Α α α α α η Ε α α α Ξ α α Γ Α Κ Κ Κ Ε λ Ε Ν Ε θ Ξ κ Ε Ν Κ Μ Ν Τ μ Υ Γ φ Ε Κ Τ θ
Abschätzung der Messunsicherheit (Fehlerrechnung)
") Abschätzung der Messunsicherheit (Fehlerrechnung) Die vorliegende Anleitung ist für das Anfängerpraktikum Physik gedacht, um den Einstieg in die Abschätzung von Messunsicherheiten und die Berechnung der
Abschätzung der Messunsicherheit (Fehlerrechnung) Die vorliegende Anleitung ist für das Anfängerpraktikum Physik gedacht, um den Einstieg in die Abschätzung von Messunsicherheiten und die Berechnung der
FAMOS Galileo for Future AutoMOtive Systems
 FAMOS Galileo for Future AutoMOtive Systems Dr. Lutz Junge Wolfsburg, 08.09.2009 Der Straßenverkehr wächst! Situation und Entwicklung in Deutschland und Europa Hauptprobleme: Unfalltote 2007 EU-27 42.485
FAMOS Galileo for Future AutoMOtive Systems Dr. Lutz Junge Wolfsburg, 08.09.2009 Der Straßenverkehr wächst! Situation und Entwicklung in Deutschland und Europa Hauptprobleme: Unfalltote 2007 EU-27 42.485
Was passiert in satellitengestützten Referenzstationsnetzen
 Was passiert in satellitengestützten Referenzstationsnetzen Andreas Bagge Geo++ GmbH D-30827 Garbsen www.geopp.de Inhalt Zielsetzung eines Referenznetzes GNSS Grundprinzip GNSS Fehlerquellen Differentielles
Was passiert in satellitengestützten Referenzstationsnetzen Andreas Bagge Geo++ GmbH D-30827 Garbsen www.geopp.de Inhalt Zielsetzung eines Referenznetzes GNSS Grundprinzip GNSS Fehlerquellen Differentielles
RatSLAM. Torben Becker. 24. Mai HAW Hamburg
 HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
Globale Navigations Satelliten Systeme - GNSS
 Globale Navigations Satelliten Systeme - GNSS Inhalt Sputnik 1 und die Folgen Die ersten GNSS - Navy Navigation Satellite System und Tsikada Entwicklung des Global Positioning System und des Glonass Die
Globale Navigations Satelliten Systeme - GNSS Inhalt Sputnik 1 und die Folgen Die ersten GNSS - Navy Navigation Satellite System und Tsikada Entwicklung des Global Positioning System und des Glonass Die
Mobile Anwendungen für GNSS-Positionierung und GIS
 Mobile Anwendungen für GNSS-Positionierung und GIS Michael Schulz ALLSAT GmbH, Hannover Mobile Anwendungen für GNSS-Positionierung und GIS 1. Aktuelle Konfiguration 2. Zukünftige Entwicklungen 3. Anwendungsbeispiele
Mobile Anwendungen für GNSS-Positionierung und GIS Michael Schulz ALLSAT GmbH, Hannover Mobile Anwendungen für GNSS-Positionierung und GIS 1. Aktuelle Konfiguration 2. Zukünftige Entwicklungen 3. Anwendungsbeispiele
Positionsbestimmung im Weltraum mittels Distanzmessungen
 Positionsbestimmung im Weltraum mittels Distanzmessungen Andrea Maier Institut für Weltraumforschung Abteilung für Satellitengeodäsie Graz in Space 6.-7. September, 2012 1 / 23 Allgemein Was ist eine Position?
Positionsbestimmung im Weltraum mittels Distanzmessungen Andrea Maier Institut für Weltraumforschung Abteilung für Satellitengeodäsie Graz in Space 6.-7. September, 2012 1 / 23 Allgemein Was ist eine Position?
Kinematische Ingenieurvermessung von Autobahnen und U-Bahnen mit Hochleistungs-Laserscannern
 Kinematische Ingenieurvermessung von Autobahnen und U-Bahnen mit Hochleistungs-Laserscannern 3D MAPPING Tätigkeitsgebiete der 3D Mapping Solutions GmbH Kinematische Aufnahme von Straßennetzen Fahrzeugnavigation
Kinematische Ingenieurvermessung von Autobahnen und U-Bahnen mit Hochleistungs-Laserscannern 3D MAPPING Tätigkeitsgebiete der 3D Mapping Solutions GmbH Kinematische Aufnahme von Straßennetzen Fahrzeugnavigation
Flüsse, Fixpunkte, Stabilität
 1 Flüsse, Fixpunkte, Stabilität Proseminar: Theoretische Physik Yannic Borchard 7. Mai 2014 2 Motivation Die hier entwickelten Formalismen erlauben es, Aussagen über das Verhalten von Lösungen gewöhnlicher
1 Flüsse, Fixpunkte, Stabilität Proseminar: Theoretische Physik Yannic Borchard 7. Mai 2014 2 Motivation Die hier entwickelten Formalismen erlauben es, Aussagen über das Verhalten von Lösungen gewöhnlicher
Tracking. Einführung. Allgemeiner Systemaufbau. Objektlokalisation: Template-Matching. Prädiktionsfilter: Kalman
 Tracking Einführung Allgemeiner Systemaufbau Objektlokalisation: Template-Matching Prädiktionsfilter: Kalman Birgit Möller & Denis Williams AG Bioinformatik & Mustererkennung Institut für Informatik Martin-Luther-Universität
Tracking Einführung Allgemeiner Systemaufbau Objektlokalisation: Template-Matching Prädiktionsfilter: Kalman Birgit Möller & Denis Williams AG Bioinformatik & Mustererkennung Institut für Informatik Martin-Luther-Universität
Analyse GNSS L2 Tracking für Javad und Leica Empfänger
 Analyse GNSS L2 Tracking für Javad und Leica Empfänger Gerhard Wübbena, Martin Schmitz, Norbert Matzke Geo++ Gesellschaft für satellitengestützte geodätische und navigatorische Technologien mbh D-30827
Analyse GNSS L2 Tracking für Javad und Leica Empfänger Gerhard Wübbena, Martin Schmitz, Norbert Matzke Geo++ Gesellschaft für satellitengestützte geodätische und navigatorische Technologien mbh D-30827
Entwicklung, Kalibrierung und Evaluierung eines tragbaren direkt georeferenzierten Laserscanning Systems für kinematische Anwendungen
 Entwicklung, Kalibrierung und Evaluierung eines tragbaren direkt georeferenzierten Laserscanning Systems für kinematische Anwendungen Geodätische Woche 2015, Stuttgart Erik Heinz, Christian Eling, Lasse
Entwicklung, Kalibrierung und Evaluierung eines tragbaren direkt georeferenzierten Laserscanning Systems für kinematische Anwendungen Geodätische Woche 2015, Stuttgart Erik Heinz, Christian Eling, Lasse
Kalman-Filter und Target Tracking
 Kalman-Filter und Target Tracking Peter Poschmann Hochschule für Technik und Wirtschaft Dresden Fakultät Informatik/Mathematik 23. März 2016 Inhalt 1 Kalman-Filter Einleitung Eindimensionaler Kalman-Filter
Kalman-Filter und Target Tracking Peter Poschmann Hochschule für Technik und Wirtschaft Dresden Fakultät Informatik/Mathematik 23. März 2016 Inhalt 1 Kalman-Filter Einleitung Eindimensionaler Kalman-Filter
Ionosphärenbestimmung mit verschiedenen geodätischen Weltraumverfahren
 Ionosphärenbestimmung mit verschiedenen geodätischen Weltraumverfahren Todorova S. 1, Hobiger T. 2,1, Weber R. 1, Schuh H. 1 (1) Institut für Geodäsie und Geophysik, Technische Universität Wien, Österreich
Ionosphärenbestimmung mit verschiedenen geodätischen Weltraumverfahren Todorova S. 1, Hobiger T. 2,1, Weber R. 1, Schuh H. 1 (1) Institut für Geodäsie und Geophysik, Technische Universität Wien, Österreich
Satellitennavigation. Verknüpfung von Forschung und Lehre. Prof. Dr.-Ing. Götz C. Kappen Labor für Nachrichtentechnik
 Satellitennavigation Verknüpfung von Forschung und Lehre Labor für Nachrichtentechnik Stegerwaldstraße 39 fon +49 (0)2551.9 62-812 goetz.kappen@fh-muenster.de D-48565 Steinfurt fax +49 (0)2551.9 62-963
Satellitennavigation Verknüpfung von Forschung und Lehre Labor für Nachrichtentechnik Stegerwaldstraße 39 fon +49 (0)2551.9 62-812 goetz.kappen@fh-muenster.de D-48565 Steinfurt fax +49 (0)2551.9 62-963
Titelmaster. Absolute Antennenkalibrierung für geodätische Punktfelder. dm cm mm. Philipp Zeimetz
 igg Titelmaster Absolute Antennenkalibrierung für geodätische Punktfelder dm cm mm Philipp Zeimetz Institut für Geodäsie und Geoinformation Universität Bonn FGS 2010, Wettzell/Kötzting Gliederung Antennenproblem
igg Titelmaster Absolute Antennenkalibrierung für geodätische Punktfelder dm cm mm Philipp Zeimetz Institut für Geodäsie und Geoinformation Universität Bonn FGS 2010, Wettzell/Kötzting Gliederung Antennenproblem
Verwundbarkeit von GNSS Eine Chance für Galileo?
 Verwundbarkeit von GNSS Eine Chance für Galileo? GNSS Interferenz Monitoring Dr. Philipp Berglez TeleConsult Austria GmbH 7. Navigations-Get-Together zum Thema Aktuelle Projekte im Bereich Navigation Wien,
Verwundbarkeit von GNSS Eine Chance für Galileo? GNSS Interferenz Monitoring Dr. Philipp Berglez TeleConsult Austria GmbH 7. Navigations-Get-Together zum Thema Aktuelle Projekte im Bereich Navigation Wien,
TLS im statischen, stop & go sowie kinematischen Einsatz
 TLS im statischen, stop & go sowie kinematischen Einsatz Terrestrisches Laserscanning 2015 07.12.2015, Fulda Christoph Holst & Heiner Kuhlmann Institut für Geodäsie und Geoinformation, Universität Bonn
TLS im statischen, stop & go sowie kinematischen Einsatz Terrestrisches Laserscanning 2015 07.12.2015, Fulda Christoph Holst & Heiner Kuhlmann Institut für Geodäsie und Geoinformation, Universität Bonn
Kinematische Bestandsdatenerfassung mit Laserscannern
 Kinematische Bestandsdatenerfassung mit Laserscannern 3D MAPPING Das Mobile Straßen Erfassungs- System (MoSES) Aufnahme des Straßen- oder Schienenkorridors mit ca. 40 m Breite Erfassung des Raumes mit
Kinematische Bestandsdatenerfassung mit Laserscannern 3D MAPPING Das Mobile Straßen Erfassungs- System (MoSES) Aufnahme des Straßen- oder Schienenkorridors mit ca. 40 m Breite Erfassung des Raumes mit
Breitbandige Aufzeichnung und Wiedergabe. Manuel Bogedain, Noffz Computertechnik GmbH
 Breitbandige Aufzeichnung und Wiedergabe von RF Signalen für die GNSS Analyse Manuel Bogedain, Noffz Computertechnik GmbH Themenüberblick Einführung und Kurzvorstellung Herausforderungen an das Testen
Breitbandige Aufzeichnung und Wiedergabe von RF Signalen für die GNSS Analyse Manuel Bogedain, Noffz Computertechnik GmbH Themenüberblick Einführung und Kurzvorstellung Herausforderungen an das Testen
 =!'04 #>4 )-:!- / )) $!# & $ % # %)6 ) + # 6 0 %% )90 % 1% $ 9116 69)" %" :"6. 1-0 &6 -% ' 0' )%1 0(,"'% #6 0 )90 1-11 ) 9 #,0. 1 #% 0 9 & %) ) '' #' ) 0 # %6 ;+'' 0 6%((&0 6?9 ;+'' 0 9)&6? #' 1 0 +& $
=!'04 #>4 )-:!- / )) $!# & $ % # %)6 ) + # 6 0 %% )90 % 1% $ 9116 69)" %" :"6. 1-0 &6 -% ' 0' )%1 0(,"'% #6 0 )90 1-11 ) 9 #,0. 1 #% 0 9 & %) ) '' #' ) 0 # %6 ;+'' 0 6%((&0 6?9 ;+'' 0 9)&6? #' 1 0 +& $
Entwurf, Test und Analyse adaptiver Regelungsstrategien für einen nichtlinearen totzeitbehafteten technischen Prozess
 Fakultät Informatik Institut für angewandte Informatik- Professur Technische Informationssysteme Verteidigung der Diplomarbeit: Entwurf, Test und Analyse adaptiver Regelungsstrategien für einen nichtlinearen
Fakultät Informatik Institut für angewandte Informatik- Professur Technische Informationssysteme Verteidigung der Diplomarbeit: Entwurf, Test und Analyse adaptiver Regelungsstrategien für einen nichtlinearen
GNSS-basierte Bestimmung der Gletscherdynamik zur Erforschung von Glacial Lake Outburst Floods
 GNSS-basierte Bestimmung der Gletscherdynamik zur Erforschung von Glacial Lake Outburst Floods Geodätische Woche 213, Essen 8-1 Oktober 213 G. Boffi, A. Wieser Institut für Geodäsie and Photogrammetrie,
GNSS-basierte Bestimmung der Gletscherdynamik zur Erforschung von Glacial Lake Outburst Floods Geodätische Woche 213, Essen 8-1 Oktober 213 G. Boffi, A. Wieser Institut für Geodäsie and Photogrammetrie,
KG-Oberkurs 2011 Vorlesungen: Grundlagen der Kinematik und Dynamik
 KG-Oberkurs 011 Vorlesungen: Grundlagen der Kinematik und Dynamik Dr.-Ing. Ulrich Simon 1 Allgemeines Biomechanik Biologie Mechanik Ziel der Vorlesung: Mechanische Grundlagen in anschaulicher Form aufzufrischen.
KG-Oberkurs 011 Vorlesungen: Grundlagen der Kinematik und Dynamik Dr.-Ing. Ulrich Simon 1 Allgemeines Biomechanik Biologie Mechanik Ziel der Vorlesung: Mechanische Grundlagen in anschaulicher Form aufzufrischen.
Wetter. Benjamin Bogner
 Warum ändert sich das ständig? vorhersage 25.05.2011 Warum ändert sich das ständig? vorhersage Inhaltsverzeichnis 1 Definition 2 Warum ändert sich das ständig? Ein einfaches Atmosphärenmodell Ursache der
Warum ändert sich das ständig? vorhersage 25.05.2011 Warum ändert sich das ständig? vorhersage Inhaltsverzeichnis 1 Definition 2 Warum ändert sich das ständig? Ein einfaches Atmosphärenmodell Ursache der
Physikalische Übungen für Pharmazeuten
 Helmholtz-Institut für Strahlen- und Kernphysik Seminar Physikalische Übungen für Pharmazeuten Ch. Wendel Max Becker Karsten Koop Dr. Christoph Wendel Übersicht Inhalt des Seminars Praktikum - Vorbereitung
Helmholtz-Institut für Strahlen- und Kernphysik Seminar Physikalische Übungen für Pharmazeuten Ch. Wendel Max Becker Karsten Koop Dr. Christoph Wendel Übersicht Inhalt des Seminars Praktikum - Vorbereitung
Jonas Schulz Christopher Zemann Markus Gölles
 Effizienzsteigerung und Optimierung des Zusammenspiels von Scheitholzkessel, Pufferspeicher und Solaranlage durch die Verwendung mathematischer Modelle Jonas Schulz Christopher Zemann Markus Gölles Ausgangssituation
Effizienzsteigerung und Optimierung des Zusammenspiels von Scheitholzkessel, Pufferspeicher und Solaranlage durch die Verwendung mathematischer Modelle Jonas Schulz Christopher Zemann Markus Gölles Ausgangssituation
Inertiale Navigationssysteme Eine Einführung
 Inertiale Navigationssysteme Eine Einführung SFB 67 Ringvorlesung SS 07 Stuttgart,. Juni 007 Jörg F. Wagner Institut für Statik und Dynamik der Luft- und Raumfahrtkonstruktionen Universität Stuttgart Jörg
Inertiale Navigationssysteme Eine Einführung SFB 67 Ringvorlesung SS 07 Stuttgart,. Juni 007 Jörg F. Wagner Institut für Statik und Dynamik der Luft- und Raumfahrtkonstruktionen Universität Stuttgart Jörg
GPS - Global Positioning System
 27.Jänner.2005 1 Vortragspunkte 2 der Navigationssysteme 3 Grundlegende einfachster Fall (1-D) Sender und Empfänger nicht synchron (1-D) Berechnung in der Ebene (2-D) Übergang in den Raum (3-D) 4 von GPS
27.Jänner.2005 1 Vortragspunkte 2 der Navigationssysteme 3 Grundlegende einfachster Fall (1-D) Sender und Empfänger nicht synchron (1-D) Berechnung in der Ebene (2-D) Übergang in den Raum (3-D) 4 von GPS
Probeklausur: Nichtlineare Regelungssysteme 1 Sommer 2016
 4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Probeklausur: Nichtlineare Regelungssysteme 1 Sommer 2016 Hörsaal 2 Montag, den 08. 08. 2016 Beginn: 10.00 Uhr Bearbeitungszeit: 120
4 6 Fachgebiet Regelungstechnik Leiter: Prof. Dr.-Ing. Johann Reger Probeklausur: Nichtlineare Regelungssysteme 1 Sommer 2016 Hörsaal 2 Montag, den 08. 08. 2016 Beginn: 10.00 Uhr Bearbeitungszeit: 120
Kopplung von Neuronen
 Katharina Ritter, Friedrich Bach, Felix Tabbert, Walter Tewes, Matthias Walther 12.06.2012 Inhalt Einführung Lighthouse-Modell Numerische Ergebnisse Schlussbemerkungen Unterschiede zum 1 Neuronenmodell
Katharina Ritter, Friedrich Bach, Felix Tabbert, Walter Tewes, Matthias Walther 12.06.2012 Inhalt Einführung Lighthouse-Modell Numerische Ergebnisse Schlussbemerkungen Unterschiede zum 1 Neuronenmodell
Galileo Möglichkeiten aus Sicht der Industrie. Galileo Vorbereitung auf künftige Märkte
 Möglichkeiten aus Sicht der Industrie Peter Loef Leiter ascos Satelliten Referenzdienst der E.ON Ruhrgas AG Vorbereitung auf künftige Märkte Informationsveranstaltung im Bundesministerium für Verkehr,
Möglichkeiten aus Sicht der Industrie Peter Loef Leiter ascos Satelliten Referenzdienst der E.ON Ruhrgas AG Vorbereitung auf künftige Märkte Informationsveranstaltung im Bundesministerium für Verkehr,
Der Einfluss des Bodensees auf das neue Quasigeoid für Deutschland
 Der Einfluss des Bodensees auf das neue Quasigeoid für Deutschland Joachim Schwabe, Uwe Schirmer, Uwe Schäfer, Gunter Liebsch, Franz Barthelmes 1, Svetozar Petrovic 1 1 GFZ Potsdam German Combined Quasigeoid
Der Einfluss des Bodensees auf das neue Quasigeoid für Deutschland Joachim Schwabe, Uwe Schirmer, Uwe Schäfer, Gunter Liebsch, Franz Barthelmes 1, Svetozar Petrovic 1 1 GFZ Potsdam German Combined Quasigeoid
PP Physikalisches Pendel
 PP Physikalisches Pendel Blockpraktikum Frühjahr 2007 (Gruppe 2) 25. April 2007 Inhaltsverzeichnis 1 Einführung 2 2 Theoretische Grundlagen 2 2.1 Ungedämpftes physikalisches Pendel.......... 2 2.2 Dämpfung
PP Physikalisches Pendel Blockpraktikum Frühjahr 2007 (Gruppe 2) 25. April 2007 Inhaltsverzeichnis 1 Einführung 2 2 Theoretische Grundlagen 2 2.1 Ungedämpftes physikalisches Pendel.......... 2 2.2 Dämpfung
Messtechnik. Rainer Parthier
 Rainer Parthier Messtechnik Grundlagen und Anwendungen der elektrischen Messtechnik für alle technischen Fachrichtungen und Wirtschaftsingenieure 6., überarbeitete und erweiterte Auflage Mit 136 Abbildungen
Rainer Parthier Messtechnik Grundlagen und Anwendungen der elektrischen Messtechnik für alle technischen Fachrichtungen und Wirtschaftsingenieure 6., überarbeitete und erweiterte Auflage Mit 136 Abbildungen
Galileo und Anwendungen. GPS/Galileo/GLONASS-Frontend
 GPS/Galileo/GLONASS-Frontend ITG-Diskussionssitzung Galileo und Anwendungen GPS/Galileo/GLONASS-Frontend Sascha Jakoblew, Robert Bosch GmbH 05. Juni 2008, Oberpfaffenhofen 1 GPS/Galileo/GLONASS-Frontend
GPS/Galileo/GLONASS-Frontend ITG-Diskussionssitzung Galileo und Anwendungen GPS/Galileo/GLONASS-Frontend Sascha Jakoblew, Robert Bosch GmbH 05. Juni 2008, Oberpfaffenhofen 1 GPS/Galileo/GLONASS-Frontend
Gemeinsame Nutzung von GPS und GLONASS im Satellitenpositionierungsdienst
 Martin Floth, Wilfried Korth Gemeinsame Nutzung von GPS und GLONASS im Satellitenpositionierungsdienst SAPOS Mit der Verfügbarkeit weiterer GLONASS-Satelliten streben die Bundesländer sukzessiv an, den
Martin Floth, Wilfried Korth Gemeinsame Nutzung von GPS und GLONASS im Satellitenpositionierungsdienst SAPOS Mit der Verfügbarkeit weiterer GLONASS-Satelliten streben die Bundesländer sukzessiv an, den
Satellitennavigation Galileo / GATE
 Satellitennavigation Galileo / GATE 1 1 eorg Kern EN GmbH ATE Aktivitäten und Upgrade atnav Arbeitstreffen 19. Februar 2013 SatNav Arbeitstreffen Arbeitstreffen 19.02.2013 19. Februar 2013 GATE Unterstützung
Satellitennavigation Galileo / GATE 1 1 eorg Kern EN GmbH ATE Aktivitäten und Upgrade atnav Arbeitstreffen 19. Februar 2013 SatNav Arbeitstreffen Arbeitstreffen 19.02.2013 19. Februar 2013 GATE Unterstützung
x W x 3 W M 2 x 2 x 1
 Priv-Doz G Reißig, F Goßmann MSc Universität der Bundeswehr München Institut für Steuer- und Regelungstechnik LRT-5 Email: felixgossmann@unibwde Moderne Methoden der Regelungstechnik, HT 26 Übung - Lösung
Priv-Doz G Reißig, F Goßmann MSc Universität der Bundeswehr München Institut für Steuer- und Regelungstechnik LRT-5 Email: felixgossmann@unibwde Moderne Methoden der Regelungstechnik, HT 26 Übung - Lösung
Encoder Elektronischer Teilkreisabgriff Elektronischer Winkelabgriff. Elektronische Winkelgeber in geodätischen Messinstrumenten. Synonyme.
 Elektronische Winkelgeber in geodätischen Messinstrumenten Synonyme Encoder Elektronischer Teilkreisabgriff Elektronischer Winkelabgriff 1 Gliederung der Vorlesung Einführung - Entwicklungsgeschichte -
Elektronische Winkelgeber in geodätischen Messinstrumenten Synonyme Encoder Elektronischer Teilkreisabgriff Elektronischer Winkelabgriff 1 Gliederung der Vorlesung Einführung - Entwicklungsgeschichte -
Phasenmessung in der nichtlinearen Optik
 Phasenmessung in der nichtlinearen Optik Th. Lottermoser, t. Leute und M. Fiebig, D. Fröhlich, R.V. Pisarev Einleitung Prinzip der Phasenmessung Experimentelle Durchführung Ergebnisse YMnO 3 Einleitung
Phasenmessung in der nichtlinearen Optik Th. Lottermoser, t. Leute und M. Fiebig, D. Fröhlich, R.V. Pisarev Einleitung Prinzip der Phasenmessung Experimentelle Durchführung Ergebnisse YMnO 3 Einleitung
Möglichkeiten und Grenzen der Satellitennavigation in urbanen Schienennetzen
 Keeping on Track - GNSS 1 / 18 Möglichkeiten und Grenzen der Satellitennavigation in urbanen Schienennetzen Bernhard Ömer Austrian Research Centers in Zusammenarbeit mit den Wiener Linien e-mail: bernhard.oemer@arcs.ac.at
Keeping on Track - GNSS 1 / 18 Möglichkeiten und Grenzen der Satellitennavigation in urbanen Schienennetzen Bernhard Ömer Austrian Research Centers in Zusammenarbeit mit den Wiener Linien e-mail: bernhard.oemer@arcs.ac.at
Modellierung und Simulation von Mischvorgängen in einem Rührer - Bachelorarbeit -
 Modellierung und Simulation von Mischvorgängen in einem Rührer - Bachelorarbeit - Dies Mathematicus 211 25. November 211 Gliederung 1 Motivation: Mischvorgänge in einem Rührer 2 Mathematische Modellierung
Modellierung und Simulation von Mischvorgängen in einem Rührer - Bachelorarbeit - Dies Mathematicus 211 25. November 211 Gliederung 1 Motivation: Mischvorgänge in einem Rührer 2 Mathematische Modellierung
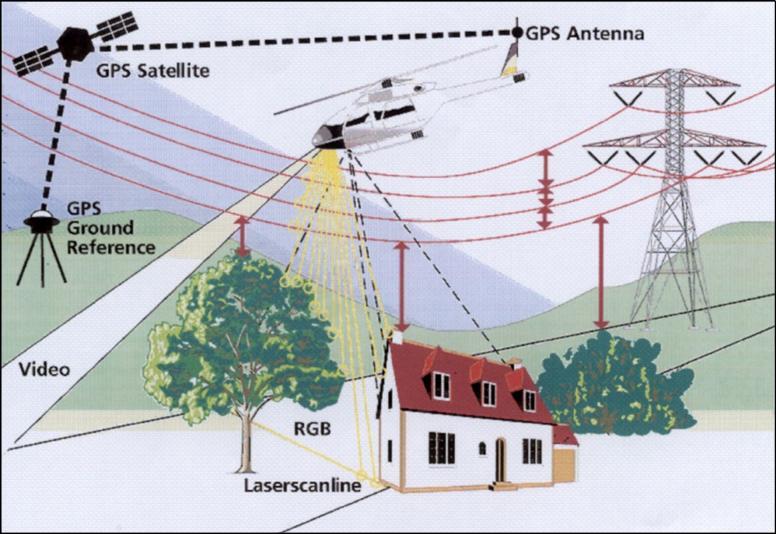
Einsatz fahrzeug- und helikopter gestützter Messsysteme für die Erfassung von Straßenbestandsdaten
 Einsatz fahrzeug- und helikopter gestützter Messsysteme für die Erfassung von Straßenbestandsdaten Robert Hau; Nebel & Partner Mobile Mapping 2013 Geodaten für die Mobilität der Zukunft 19. Juni 2013,
Einsatz fahrzeug- und helikopter gestützter Messsysteme für die Erfassung von Straßenbestandsdaten Robert Hau; Nebel & Partner Mobile Mapping 2013 Geodaten für die Mobilität der Zukunft 19. Juni 2013,
WFF Abschlussveranstaltung Langen 25. März 2010
 WFF Abschlussveranstaltung Langen 25. März 2010 MLAT Ulrich Berold, iad GmbH, Großhabersdorf INHALT 1. Anforderungen und Ziele 2. Funktionsprinzip 3. Mehrantennensysteme 4. Demonstratorsysteme 5. Messungen
WFF Abschlussveranstaltung Langen 25. März 2010 MLAT Ulrich Berold, iad GmbH, Großhabersdorf INHALT 1. Anforderungen und Ziele 2. Funktionsprinzip 3. Mehrantennensysteme 4. Demonstratorsysteme 5. Messungen
Faseroptische Erweiterung des geodätischen Messlabors der TU Graz
 Faseroptische Erweiterung des geodätischen Messlabors der TU Graz Helmut Woschitz Institut für Ingenieurgeodäsie und Messsysteme TU Graz [20120509_FO_Labor_OGT12_Velden.ppt] 1 Geodätisches Messlabor Messlabor
Faseroptische Erweiterung des geodätischen Messlabors der TU Graz Helmut Woschitz Institut für Ingenieurgeodäsie und Messsysteme TU Graz [20120509_FO_Labor_OGT12_Velden.ppt] 1 Geodätisches Messlabor Messlabor
Versuch dp : Drehpendel
 U N I V E R S I T Ä T R E G E N S B U R G Naturwissenschaftliche Fakultät II - Physik Anleitung zum Physikpraktikum für Chemiker Versuch dp : Drehpendel Inhaltsverzeichnis Inhaltsverzeichnis 1 Einführung
U N I V E R S I T Ä T R E G E N S B U R G Naturwissenschaftliche Fakultät II - Physik Anleitung zum Physikpraktikum für Chemiker Versuch dp : Drehpendel Inhaltsverzeichnis Inhaltsverzeichnis 1 Einführung
Lokalisierung und Topologiekontrolle
 Lokalisierung und Topologiekontrolle Seminar: Kommunikation in drahtlosen Sensornetzwerken Martin Schmidt Einführung Lokalisierung: Für viele Informationen ist die Position wichtig Traditionelle Technik
Lokalisierung und Topologiekontrolle Seminar: Kommunikation in drahtlosen Sensornetzwerken Martin Schmidt Einführung Lokalisierung: Für viele Informationen ist die Position wichtig Traditionelle Technik
Polte, Galina; Rennert, Klaus-Jürgen; Linß, Gerhard: Korrektur von Abbildungsfehlern für optische Messverfahren
 Polte, Galina; Rennert, Klaus-Jürgen; Linß, Gerhard: Korrektur von Abbildungsfehlern für optische Messverfahren Publikation entstand im Rahmen der Veranstaltung: Workshop "Flexible Montage", Ilmenau, 09.
Polte, Galina; Rennert, Klaus-Jürgen; Linß, Gerhard: Korrektur von Abbildungsfehlern für optische Messverfahren Publikation entstand im Rahmen der Veranstaltung: Workshop "Flexible Montage", Ilmenau, 09.
im Ottomotor mit der Large Eddy Simulation
 Numerische Berechnung der Strömung im Ottomotor mit der Large Eddy Simulation F. Magagnato Übersicht Motivation Numerisches Schema von SPARC Netzgenerierung und Modellierung LES des ROTAX Motors bei 2000
Numerische Berechnung der Strömung im Ottomotor mit der Large Eddy Simulation F. Magagnato Übersicht Motivation Numerisches Schema von SPARC Netzgenerierung und Modellierung LES des ROTAX Motors bei 2000
GALILEO s potentielle Beiträge zur Geodynamik und als Atmosphärensensor Scientific Applications
 GALILEO s potentielle Beiträge zur Geodynamik und als Atmosphärensensor Scientific Applications Robert Weber, Inst.f. Geodäsie & Geophysik, TU-Wien Galileo Applications Day, 2. Mai 2007 GALILEO s Wert
GALILEO s potentielle Beiträge zur Geodynamik und als Atmosphärensensor Scientific Applications Robert Weber, Inst.f. Geodäsie & Geophysik, TU-Wien Galileo Applications Day, 2. Mai 2007 GALILEO s Wert
Zeitreihenanalyse. Seminar Finanzmathematik. Andreas Dienst SS Einleitung - Begrüßung - Motivation - Inhaltsangabe. 2.
 Seminar Finanzmathematik - Begrüßung - Motivation - Inhaltsangabe 3. Zusammen - fassung Zeitreihenanalyse Andreas Dienst SS 2006 Zeitreihen: Definition und Motivation - Begrüßung - Motivation - Inhaltsangabe
Seminar Finanzmathematik - Begrüßung - Motivation - Inhaltsangabe 3. Zusammen - fassung Zeitreihenanalyse Andreas Dienst SS 2006 Zeitreihen: Definition und Motivation - Begrüßung - Motivation - Inhaltsangabe
Erstellung von 3D Katasterdaten für Städte und Gemeinden mit mobilen Vermessungsmethoden. Dr.-Ing. Gunnar Gräfe 3D Mapping Solutions GmbH
 Erstellung von 3D Katasterdaten für Städte und Gemeinden mit mobilen Vermessungsmethoden Dr.-Ing. Gunnar Gräfe 3D Mapping Solutions GmbH Tätigkeitsgebiete der 3D Mapping Solutions GmbH Kinematische Aufnahme
Erstellung von 3D Katasterdaten für Städte und Gemeinden mit mobilen Vermessungsmethoden Dr.-Ing. Gunnar Gräfe 3D Mapping Solutions GmbH Tätigkeitsgebiete der 3D Mapping Solutions GmbH Kinematische Aufnahme
ein stationärer Prozeß (AR(0)). Etwas allgemeiner nimmt man an, daß die d-te Differenz ARMA(p, q) ist, also ist die Differenz
). Etwas allgemeiner nimmt man an, daß die d-te Differenz ARMA(p, q) ist, also ist die Differenz") Kapitel 4 Nichtstationäre Zeitreihen 4.1 ARIMA-Modelle Die bisher diskutierten ARMA-Modelle sind bei bei geeigneter Wahl der Parameter stationär, d.h. wenn alle Wurzeln der Gleichung φ(λ 1 )=0betragsmäßig
Kapitel 4 Nichtstationäre Zeitreihen 4.1 ARIMA-Modelle Die bisher diskutierten ARMA-Modelle sind bei bei geeigneter Wahl der Parameter stationär, d.h. wenn alle Wurzeln der Gleichung φ(λ 1 )=0betragsmäßig
Inhaltsverzeichnis. Einführung:
 Inhaltsverzeichnis Einführung: Zu diesem Kurs... 2 Voraussetzungen... 2 Kursmethode... 2 Verwendung dieses Buches... 2 Laborübungen... 2 Schulungsdateien... 3 Windows XP... 3 Im Handbuch verwendete Konventionen...
Inhaltsverzeichnis Einführung: Zu diesem Kurs... 2 Voraussetzungen... 2 Kursmethode... 2 Verwendung dieses Buches... 2 Laborübungen... 2 Schulungsdateien... 3 Windows XP... 3 Im Handbuch verwendete Konventionen...
Anwendung der Finite Elemente Methode bei Elektrischen Maschinen
 Anwendung der Finite Elemente Methode bei Elektrischen Maschinen Erich Schmidt Institut für Elektrische Antriebe und Maschinen Technische Universität Wien Wien, Österreich Inhalt Einleitung Analyse einer
Anwendung der Finite Elemente Methode bei Elektrischen Maschinen Erich Schmidt Institut für Elektrische Antriebe und Maschinen Technische Universität Wien Wien, Österreich Inhalt Einleitung Analyse einer
Vergleich von PM- Synchronmotoren mit Neodymund Ferritmagneten für Traktionsantriebe
 Vergleich von PM- Synchronmotoren mit Neodymund Ferritmagneten für Traktionsantriebe Florian Demmelmayr, Dipl-Ing.; Bernhard Weiss, BSc; Markus Troyer; Manfred Schrödl, O.Univ.Prof. Dipl.-Ing. Dr.techn.,
Vergleich von PM- Synchronmotoren mit Neodymund Ferritmagneten für Traktionsantriebe Florian Demmelmayr, Dipl-Ing.; Bernhard Weiss, BSc; Markus Troyer; Manfred Schrödl, O.Univ.Prof. Dipl.-Ing. Dr.techn.,
Kosmologische Konstante. kosmischer Mikrowellen-Hintergrund. Strukturbildung im frühen Universum
 Kosmologische Konstante kosmischer Mikrowellen-Hintergrund und Strukturbildung im frühen Universum Philip Schneider, Ludwig-Maximilians-Universität 31.05.005 Gliederung Geschichte: Die letzten 100 Jahre
Kosmologische Konstante kosmischer Mikrowellen-Hintergrund und Strukturbildung im frühen Universum Philip Schneider, Ludwig-Maximilians-Universität 31.05.005 Gliederung Geschichte: Die letzten 100 Jahre
GPS Analogieexperiment
 Didaktik der Physik, Ruhr-Universität Bochum, www.dp.rub.de GPS Analogieexperiment Einleitung Das Global Positioning System (GPS) erlangt zunehmende Bedeutung in vielen technischen Anwendungen. Im täglichen
Didaktik der Physik, Ruhr-Universität Bochum, www.dp.rub.de GPS Analogieexperiment Einleitung Das Global Positioning System (GPS) erlangt zunehmende Bedeutung in vielen technischen Anwendungen. Im täglichen
Angewandte Ökonometrie Übung. Endogenität, VAR, Stationarität und Fehlerkorrekturmodell
 Angewandte Ökonometrie Übung 3 Endogenität, VAR, Stationarität und Fehlerkorrekturmodell Zeitreihenmodelle Zeitreihenmodelle Endogenität Instrumentvariablenschätzung Schätzung eines VARs Tests auf Anzahl
Angewandte Ökonometrie Übung 3 Endogenität, VAR, Stationarität und Fehlerkorrekturmodell Zeitreihenmodelle Zeitreihenmodelle Endogenität Instrumentvariablenschätzung Schätzung eines VARs Tests auf Anzahl
Beifach Geodäsie für Geographie (B.Sc.)
") Grundmodule Modul Bezeichnung Semester Lehrformen Leistungspunkte BfGeodGeogB01 Terrestrische Datenerfassung 2. o. 4. 3V / 1Ü / 5P 7.0 BfGeodGeogB02 Photogrammetrie für Anwender 2. o. 4. 2V / 2Ü 5.0 Erweiterungsmodule
Grundmodule Modul Bezeichnung Semester Lehrformen Leistungspunkte BfGeodGeogB01 Terrestrische Datenerfassung 2. o. 4. 3V / 1Ü / 5P 7.0 BfGeodGeogB02 Photogrammetrie für Anwender 2. o. 4. 2V / 2Ü 5.0 Erweiterungsmodule
Der Einsatz von Laserscanning-Technologie im Vergleich zu taktilen Messverfahren
 Der Einsatz von Laserscanning-Technologie im Vergleich zu taktilen Messverfahren Raf Nysen Director Engineering Nikon Metrology (Vortrag durch Herrn Holger Schuck, Technical Manager) Einleitung Traditionell
Der Einsatz von Laserscanning-Technologie im Vergleich zu taktilen Messverfahren Raf Nysen Director Engineering Nikon Metrology (Vortrag durch Herrn Holger Schuck, Technical Manager) Einleitung Traditionell
Industrie Workshop Optische Messtechnik für Präzisionswerkzeuge
 Industrie Workshop Optische Messtechnik für Präzisionswerkzeuge Optisches Messen von geometrischen Kenngrößen an Präzisionswerkzeugen mittels neuartigem Messverfahren 7. Juni 2011 Holger Hage Inhalt 1.
Industrie Workshop Optische Messtechnik für Präzisionswerkzeuge Optisches Messen von geometrischen Kenngrößen an Präzisionswerkzeugen mittels neuartigem Messverfahren 7. Juni 2011 Holger Hage Inhalt 1.
NWSIB-Tage Webcams der Verkehrszentrale NRW Beobachtung Detektion Steuerung. Dr.-Ing. Anja Estel Verkehrszentrale NRW
 NWSIB-Tage 2013 Webcams der Verkehrszentrale NRW Beobachtung Detektion Steuerung Dr.-Ing. Anja Estel Verkehrszentrale NRW 1 NWSIB-Tage 2013 Webcams der Verkehrszentrale NRW Gelsenkirchen, 21. November
NWSIB-Tage 2013 Webcams der Verkehrszentrale NRW Beobachtung Detektion Steuerung Dr.-Ing. Anja Estel Verkehrszentrale NRW 1 NWSIB-Tage 2013 Webcams der Verkehrszentrale NRW Gelsenkirchen, 21. November
Leichtbauprüfung mittels Multisensorsystemen
 Leichtbauprüfung mittels Multisensorsystemen Wolfgang Schmidt Fraunhofer IPA Warum Multisensorsysteme? Ausnutzung der verfahrensspezifischen Stärken zum Defektnachweis Verfahrensredundanz durch unabhängig
Leichtbauprüfung mittels Multisensorsystemen Wolfgang Schmidt Fraunhofer IPA Warum Multisensorsysteme? Ausnutzung der verfahrensspezifischen Stärken zum Defektnachweis Verfahrensredundanz durch unabhängig
EB TechPaper. Sensorgestützte. Fahrzeugpositionierung. Mit Präzision. elektrobit.com
 EB TechPaper Fahrzeugpositionierung Sensorgestützte Mit Präzision elektrobit.com Moderne Assistenzsysteme benötigen eine deutlich genauere Positionsbestimmung als sie satellitengestützte Systeme alleine
EB TechPaper Fahrzeugpositionierung Sensorgestützte Mit Präzision elektrobit.com Moderne Assistenzsysteme benötigen eine deutlich genauere Positionsbestimmung als sie satellitengestützte Systeme alleine
Methoden und Verfahren zur automatisierten Auswertung
 Inhalte Bildtriangulation Grundlagen Blockausgleichung mit unabhängigen Modellen Bündelblockausgleichung Methoden und Verfahren zur automatisierten Auswertung H.-J. Przybilla Bündelblockausgleichung 1
Inhalte Bildtriangulation Grundlagen Blockausgleichung mit unabhängigen Modellen Bündelblockausgleichung Methoden und Verfahren zur automatisierten Auswertung H.-J. Przybilla Bündelblockausgleichung 1
Arbeiten in einem virtuellen Festpunktfeld Erfahrungen aus zwei Geodäsieübungen
 4. Vermessungsingenieurtag an der HfT Arbeiten in einem virtuellen Festpunktfeld Erfahrungen aus zwei Geodäsieübungen Dipl.-Ing. (FH) Jörg Hepperle HfT, Schellingstraße 24, 70174 Tel. 0711/121-2604, Fax
4. Vermessungsingenieurtag an der HfT Arbeiten in einem virtuellen Festpunktfeld Erfahrungen aus zwei Geodäsieübungen Dipl.-Ing. (FH) Jörg Hepperle HfT, Schellingstraße 24, 70174 Tel. 0711/121-2604, Fax
Industrial Monitoring System SASI
 Industrial Monitoring System SASI Ein Stör-Analyse-System für die Instandhaltung Joachim Schreibmaier GmbH & Co KG Agenda Firmenvorstellung SASI Motivation & Geschichte SASI Zielsetzung SASI Realisierung
Industrial Monitoring System SASI Ein Stör-Analyse-System für die Instandhaltung Joachim Schreibmaier GmbH & Co KG Agenda Firmenvorstellung SASI Motivation & Geschichte SASI Zielsetzung SASI Realisierung
Die Elektrodengeometrie in der Geoelektrik: Eine Studie auf der Basis von Finite-Elemente-Simulationen mit dem Complete Electrode Model
 Die Elektrodengeometrie in der Geoelektrik: Eine Studie auf der Basis von Finite-Elemente-Simulationen mit dem Complete Electrode Model Carsten Rücker 1 Jan Igel 2 Oliver Mohnke 3,4 Thomas Günther 2 1
Die Elektrodengeometrie in der Geoelektrik: Eine Studie auf der Basis von Finite-Elemente-Simulationen mit dem Complete Electrode Model Carsten Rücker 1 Jan Igel 2 Oliver Mohnke 3,4 Thomas Günther 2 1
Vergleichstest der Kalibrierverfahren für GPS-Antennen Teil 2 - Vorhaben und Datensatz
 Vergleichstest der Kalibrierverfahren für GPS-Antennen Teil 2 - Vorhaben und Datensatz Uwe Feldmann-Westendorff Landesvermessung + Geobasisinformation Niedersachsen 5. GPS-Antennenworkshop im Rahmen des
Vergleichstest der Kalibrierverfahren für GPS-Antennen Teil 2 - Vorhaben und Datensatz Uwe Feldmann-Westendorff Landesvermessung + Geobasisinformation Niedersachsen 5. GPS-Antennenworkshop im Rahmen des
2 Fehler einer Messung / Messfehler
 2 Fehler einer Messung / Messfehler In allen naturwissenschaftlichen und technischen Bereichen werden durch Messungen die Werte von physikalischen, technischen oder chemischen Größen ermittelt. Es werden
2 Fehler einer Messung / Messfehler In allen naturwissenschaftlichen und technischen Bereichen werden durch Messungen die Werte von physikalischen, technischen oder chemischen Größen ermittelt. Es werden
Erweiterung einer Apparatur zur winkelabhängigen Bestimmung des Emissionsgrades bei hohen Temperaturen
 Bayerisches Zentrum für Angewandte Energieforschung e.v. Erweiterung einer Apparatur zur winkelabhängigen Bestimmung des Emissionsgrades bei hohen Temperaturen M. Rydzek, T. Stark, M. Arduini-Schuster,
Bayerisches Zentrum für Angewandte Energieforschung e.v. Erweiterung einer Apparatur zur winkelabhängigen Bestimmung des Emissionsgrades bei hohen Temperaturen M. Rydzek, T. Stark, M. Arduini-Schuster,
Neue Möglichkeiten mit GPS, GLONASS, Galileo. Dipl.-Ing. Jürgen Alberding EuroNav Service GmbH Lilienthalstr. 3B Schönefeld (b.
 Neue Möglichkeiten mit GPS, GLONASS, Galileo Dipl.-Ing. Jürgen Alberding EuroNav Service GmbH Lilienthalstr. 3B 12529 Schönefeld (b. Berlin) Überblick GPS und dessen Weiterentwicklung GLONASS Ausbaustand
Neue Möglichkeiten mit GPS, GLONASS, Galileo Dipl.-Ing. Jürgen Alberding EuroNav Service GmbH Lilienthalstr. 3B 12529 Schönefeld (b. Berlin) Überblick GPS und dessen Weiterentwicklung GLONASS Ausbaustand
LIMEZ III Der neue Lichtraummesszug der Deutschen Bahn
 LIMEZ III Der neue Lichtraummesszug der Deutschen Bahn Railborn High-Speed Laserscanning Dr. Jürgen Meier 3. Hamburger Anwenderforum Terrestrisches Laser-Scanning Hamburg, 16.06.2009 Lichtraummessung Kenntnis
LIMEZ III Der neue Lichtraummesszug der Deutschen Bahn Railborn High-Speed Laserscanning Dr. Jürgen Meier 3. Hamburger Anwenderforum Terrestrisches Laser-Scanning Hamburg, 16.06.2009 Lichtraummessung Kenntnis
Linearisierung. Vorlesung 4. Realität: nichtlinear. Wunsch: Vorteil: Anwendung einfacher Rechenmethoden (lineare DGL, lineare Gleichung) A=F(Y)
 A=F(Y)") Realität: nichtlinear Y AF(Y) A Wunsch: im Betriebspunkt linear Y K A Vorteil: Anwendung einfacher Rechenmethoden (lineare DGL, lineare Gleichung) 1 Beispiel für Nichtlineare Systemkomponente: Ventil in
Realität: nichtlinear Y AF(Y) A Wunsch: im Betriebspunkt linear Y K A Vorteil: Anwendung einfacher Rechenmethoden (lineare DGL, lineare Gleichung) 1 Beispiel für Nichtlineare Systemkomponente: Ventil in
Akustische Berechnung einer schwingenden Platte mit piezoelektrischer Anregung und Vergleich mit Messungen
 Akustische Berechnung einer schwingenden Platte mit piezoelektrischer Anregung und Vergleich mit Messungen Inhalt 1. Motivation 2. Platte und Einspannung a) Experimentelle Modalanalyse der freien Platte
Akustische Berechnung einer schwingenden Platte mit piezoelektrischer Anregung und Vergleich mit Messungen Inhalt 1. Motivation 2. Platte und Einspannung a) Experimentelle Modalanalyse der freien Platte
Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung
 Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung Mobiles Laserscanning Straßenraum
Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung Workshop Nutzung von Mobile Mapping Daten für die Stadtmodellierung und Visualisierung Mobiles Laserscanning Straßenraum
Hauptseminar Roboternavigation. Kartenaufbau nach Thrun
 Hauptseminar Roboternavigation Kartenaufbau nach Thrun Hannes Keil keil@in.tum.de 18. Januar 2002 Überblick Kartenaufbau nach Thrun Überblick 1. Einführung in den Kartenbau 2. Einführung in den Aufbau
Hauptseminar Roboternavigation Kartenaufbau nach Thrun Hannes Keil keil@in.tum.de 18. Januar 2002 Überblick Kartenaufbau nach Thrun Überblick 1. Einführung in den Kartenbau 2. Einführung in den Aufbau
Beispiel: Positionsschätzung
 Das Kalman Filter Beispiel: Positionsschätzung Beispiel: Positionsschätzung. Messung: mit Varianz Daraus abgeleitete Positionsschätzung: mit Varianz ˆX = = f f ( y ) y 3 Beispiel: Positionsschätzung. Messung:
Das Kalman Filter Beispiel: Positionsschätzung Beispiel: Positionsschätzung. Messung: mit Varianz Daraus abgeleitete Positionsschätzung: mit Varianz ˆX = = f f ( y ) y 3 Beispiel: Positionsschätzung. Messung:
Bildgebende Verfahren in der Medizin Impedanz-Tomographie Olaf Dössel
 Bildgebende Verfahren in der Medizin Impedanz-Tomographie INSTITUT FÜR BIOMEDIZINISCHE TECHNIK 2008 Google - Imagery 2008 Digital Globe, GeoContent, AeroWest, Stadt Karlsruhe VLW, Cnes/Spot Image, GeoEye
Bildgebende Verfahren in der Medizin Impedanz-Tomographie INSTITUT FÜR BIOMEDIZINISCHE TECHNIK 2008 Google - Imagery 2008 Digital Globe, GeoContent, AeroWest, Stadt Karlsruhe VLW, Cnes/Spot Image, GeoEye
Gasthermometer. durchgeführt am von Matthias Dräger, Alexander Narweleit und Fabian Pirzer
 Gasthermometer 1 PHYSIKALISCHE GRUNDLAGEN durchgeführt am 21.06.2010 von Matthias Dräger, Alexander Narweleit und Fabian Pirzer 1 Physikalische Grundlagen 1.1 Zustandgleichung des idealen Gases Ein ideales
Gasthermometer 1 PHYSIKALISCHE GRUNDLAGEN durchgeführt am 21.06.2010 von Matthias Dräger, Alexander Narweleit und Fabian Pirzer 1 Physikalische Grundlagen 1.1 Zustandgleichung des idealen Gases Ein ideales