Nachbau von einem automatischen Theater
|
|
|
- Hella Breiner
- vor 6 Jahren
- Abrufe
Transkript
1
2 Robotik Mira
3 Geschichte Antike: Musikmaschinen und automatische Theater von Heron von Alexandria, fliegende Taube von Archytas von Tarent 1205: Al-Dschazarī: Autor vom Buch des Wissens von sinnreichen mechanischen Vorrichtungen 15. Jh.: Leonardo da Vinci: Skizzen über Androiden
4 Nachbau von einem automatischen Theater
5 Geschichte Antike: Musikmaschinen und automatische Theater von Heron von Alexandria, fliegende Taube von Archytas von Tarent 1205: Al-Dschazarī: Autor vom Buch des Wissens von sinnreichen mechanischen Vorrichtungen 15. Jh.: Leonardo da Vinci: Skizzen von Androiden

6 Robotermodell basierend auf Skizzen von Leonardo da Vinci
7 Geschichte 1740: Jacques de Vaucanson: flötenspielender Automat, automatische Ente, 1. programmierbarer vollautomatischer Webstuhl (wird in der Literatur oft Joseph-Marie Jacquard 1805 zugeschrieben) 1920: Karel Čapek: Roboter für Androiden 1947: Bell Laboratories: 1. Transistor
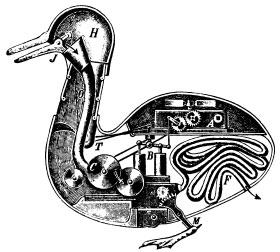
8 Automatische Ente
9 Geschichte 1740: Jacques de Vaucanson: flötenspielender Automat, automatische Ente, 1. programmierbarer vollautomatischer Webstuhl (wird in der Literatur oft Joseph-Marie Jacquard 1805 zugeschrieben) 1920: Karl Čapek: Roboter für Androiden 1947: Bell Laboratories: Transistor, leistungsstarke und platzsparende Computer

10 Nachbau des 1. Transistors
11 Geschichte 1954: George Devol: Patent für programmierbaren Manipulator Geburtsstunde der Entwicklung von Industrierobotern 1960: Unimation: 1. hydraulisch betriebene Industrieroboter 1968: MIT: 1. mobiler Roboter 1970: Stanford Research Institute: Shakey 1973: Waseda-Universität: Wabot 1

12 Unimation
13 Geschichte 1954: George Devol: Patent für programmierbaren Manipulator Geburtsstunde der Entwicklung von Industrierobotern 1960: Unimation: 1. hydraulisch betriebene Industrieroboter 1968: MIT: 1. mobiler Roboter 1970: Stanford Research Institute: Shakey 1973: Waseda-Universität: Wabot 1

14 Shakey
15 Geschichte 1954: George Devol: Patent für programmierbaren Manipulator Geburtsstunde der Entwicklung von Industrierobotern 1960: Unimation: 1. hydraulisch betriebene Industrieroboter 1968: MIT: 1. mobiler Roboter 1970: Stanford Research Institute: Shakey 1973: Waseda-Universität: Wabot 1
16 Wabot-1
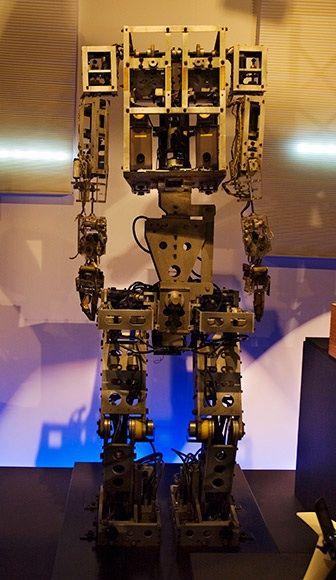
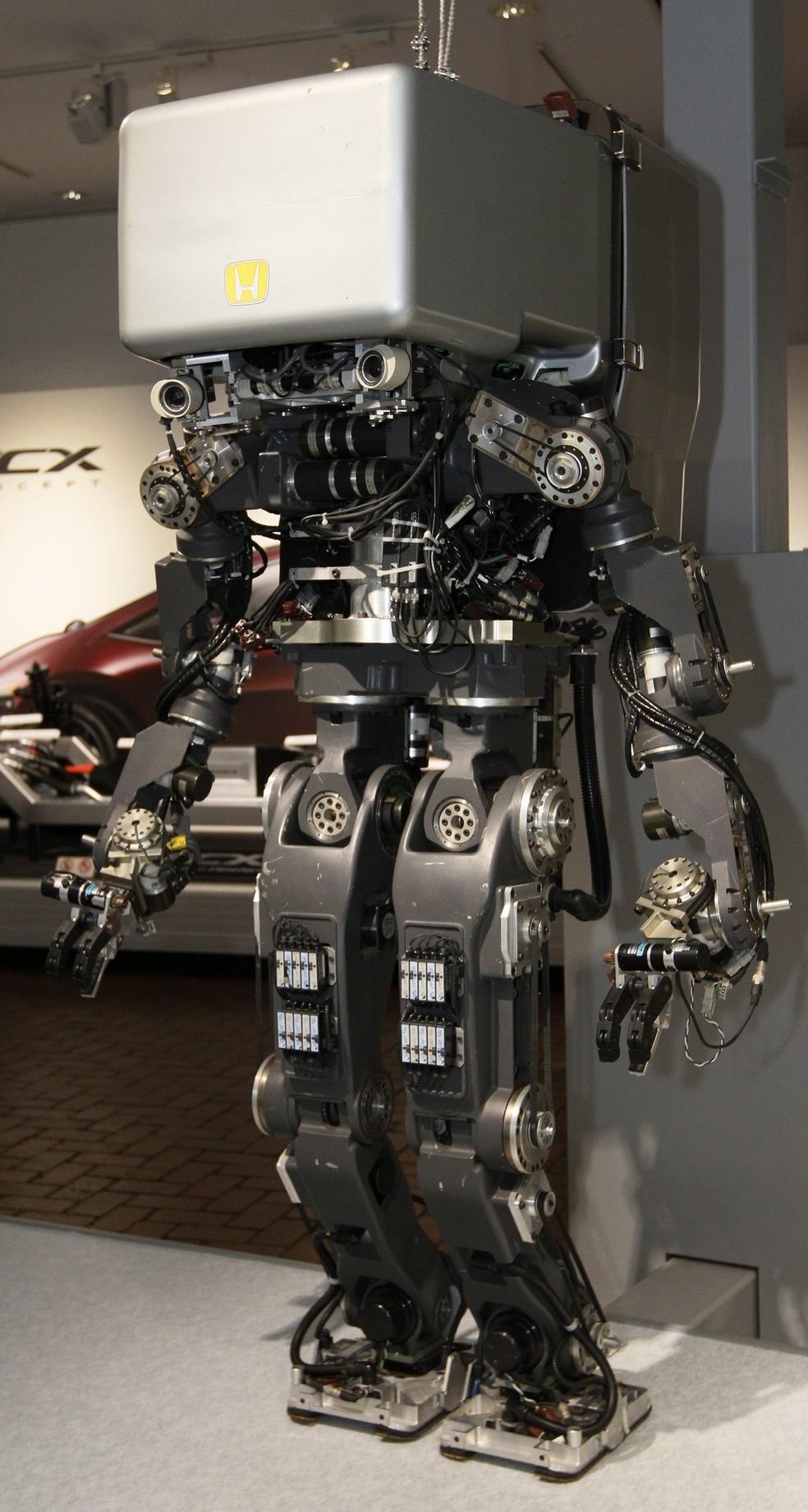
17 Geschichte 1973: KUKA: FAMULUS 1974: ASEA: IRb6 1986: Honda: Humanoid Robot Research and Development Program P1, P2, P3 2004: Honda: ASIMO 1997: Sojourner landet auf Mars

18 FAMULUS
19 Geschichte 1973: KUKA: FAMULUS 1974: ASEA: IRb6 1986: Honda: Humanoid Robot Research and Development Program P1, P2, P3 2004: Honda: ASIMO 1997: Sojourner landet auf Mars
20 P1
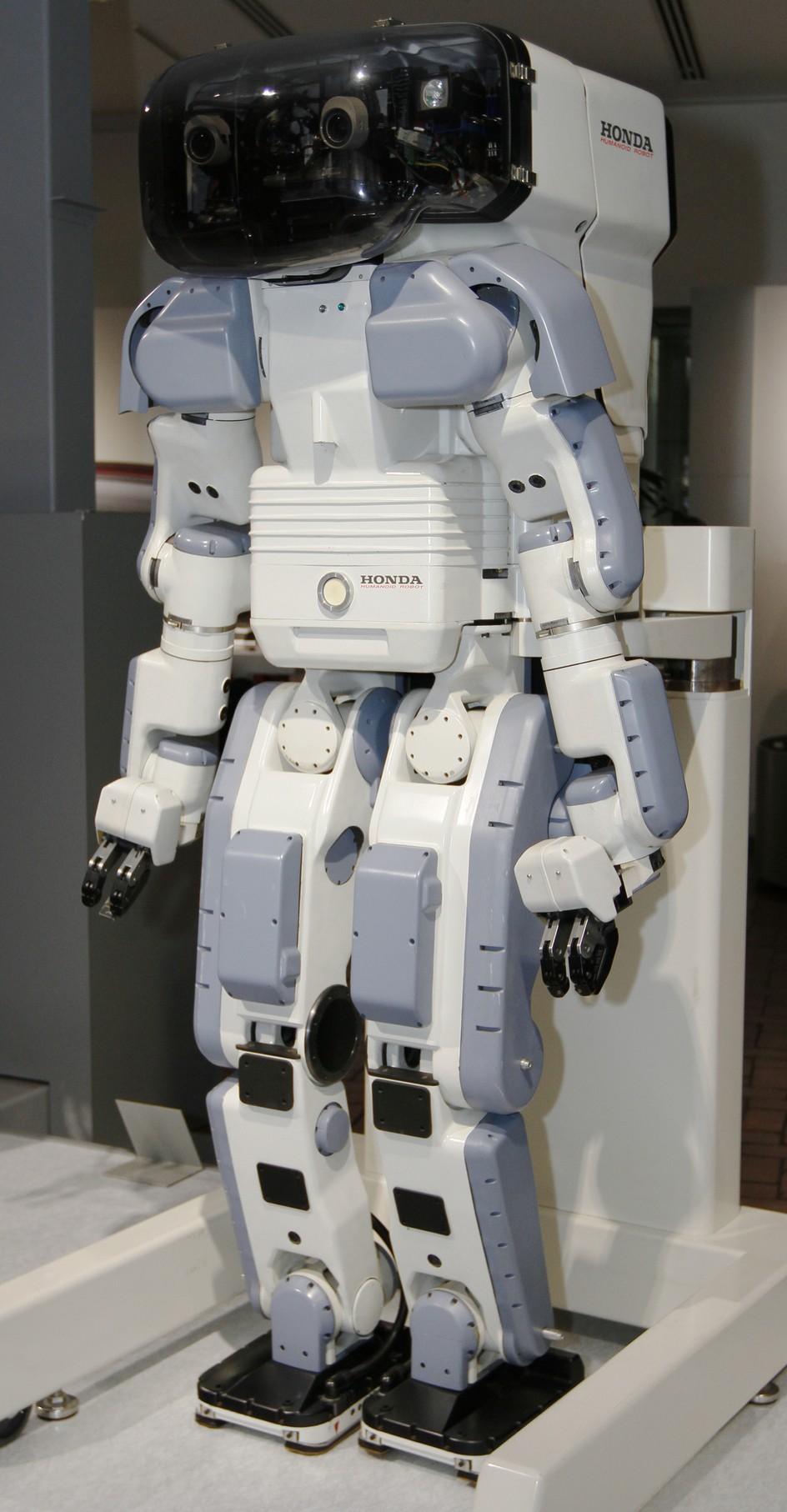
21 P2

22 P3
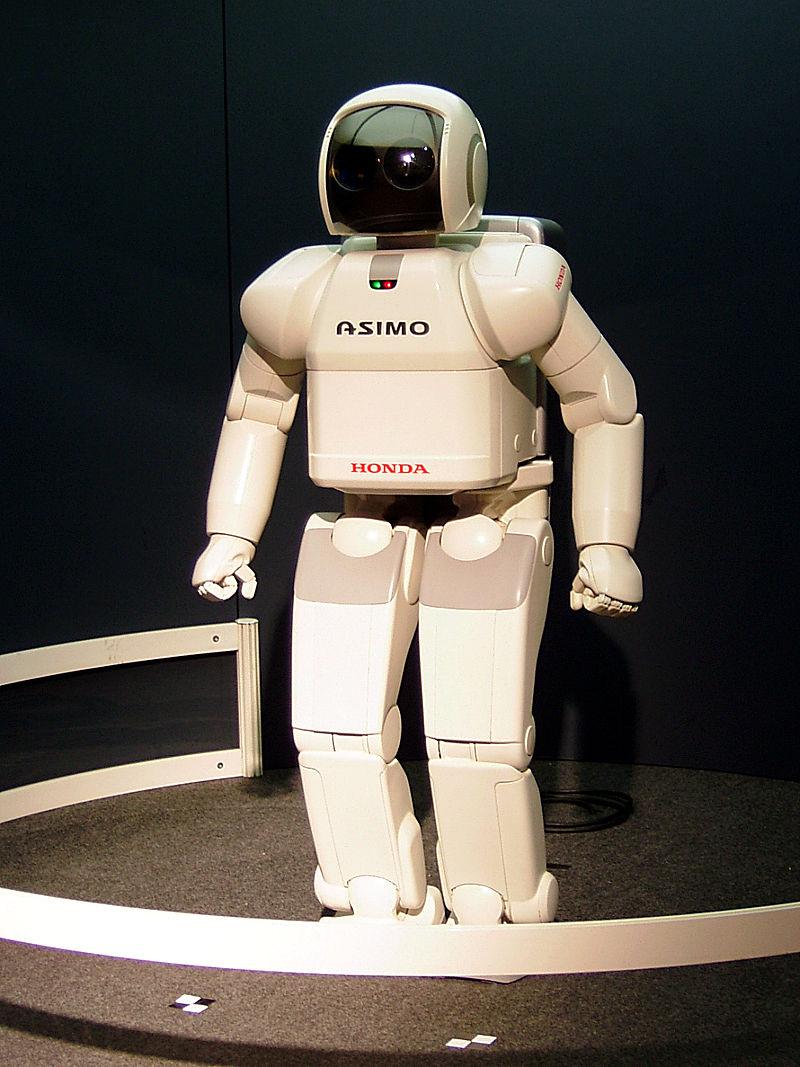
23 ASIMO
24 Geschichte 1973: KUKA: FAMULUS 1974: ASEA: IRb6 1986: Honda: Humanoid Robot Research and Development Program P1, P2, P3 2004: Honda: ASIMO 1997: Sojourner landet auf Mars

25 Marsrover im Vergleich Spirit Sojourner Curiosity
26 Heute Fortbewegungsmittel Roboter-Fußballspiele Industrieroboter: Fließband, Autos, Mikroprozessor Serviceroboter: erleichtert den Alltag, Unterhaltung (z.b. Robosapien oder Aibo) Haushaltsroboter: staubsaugen, Boden wischen, Rasen mähen Forschungsroboter: ferne Planeten, Vulkane,...
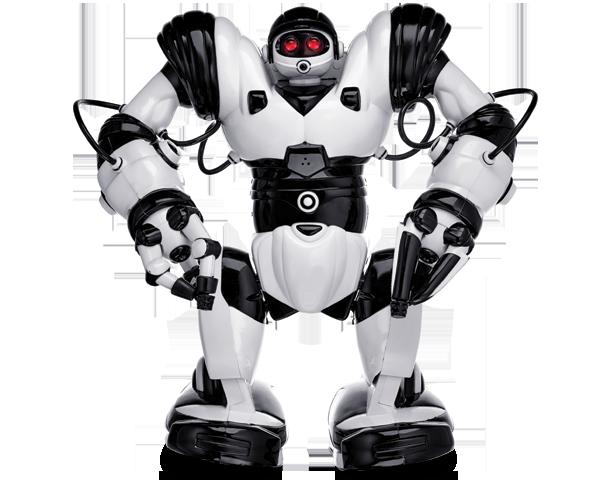

27 Robosapien

28 Aibo
29 Heute Roboter-Fußballspiele Industrieroboter: Fließband, Autos, Mikroprozessor Serviceroboter: erleichtert den Alltag, Unterhaltung (z.b. Robosapien oder Aibo) Haushaltsroboter: staubsaugen, Boden wischen, Rasen mähen Forschungsroboter: ferne Planeten, Vulkane,...
30 Heute Medizin:Untersuchungen, Operationen, Unterstützung für behinderte und ältere Menschen bei alltäglichen Aktivitäten ( Friend )

31 Friend
32 Zukunft Noch nicht existent: Nanoroboter für die Medizin (Prototypen schon vorhanden) Kryobot: Eisroboter (Prototypen schon vorhanden) Hydrobot: Unterwasserroboter (Prototypen schon vorhanden) Roboter für Proben-Rückhol-Missionen Roboter für Asteroidenbergbau
33 Quellen Bilder: Robotik Automatisches Theater Leonardo da Vinci Automatische Ente Transistor Unimation Wabot-1 FAMULUS P1, P2, P3, ASIMO Marsrover Robosapien Aibo Friend Text: Wikipedia
34 Danke für eure Aufmerksamkeit! Mira
Kapitel III: Roboter...11 1. Definition Roboter...12 2. Beispiele...14 3. Robotergesetze...15 4. Testen...16
 Kapitel III: Roboter Inhalt Kapitel III: Roboter...11 1. Definition Roboter...12 2. Beispiele...14 3. Robotergesetze...15 4. Testen...16 Copyright: RoCCI e.v. www.rocci.net Seite 11 1. Definition Roboter
Kapitel III: Roboter Inhalt Kapitel III: Roboter...11 1. Definition Roboter...12 2. Beispiele...14 3. Robotergesetze...15 4. Testen...16 Copyright: RoCCI e.v. www.rocci.net Seite 11 1. Definition Roboter
Invasion der Roboter
 Invasion der Roboter Zwischen Industrie und Kultur GPN11 25. Juni 2011 Lars Weiler Überblick Geschichte The Three Laws of Robotic Roboter als Diener Roboter in der Industrie Roboter
Invasion der Roboter Zwischen Industrie und Kultur GPN11 25. Juni 2011 Lars Weiler Überblick Geschichte The Three Laws of Robotic Roboter als Diener Roboter in der Industrie Roboter
Robot o ik und n Et E hi h k
 Robotik und Ethik II Robotik und Ethik Diplomarbeit vorgelegt von Hardy Krüger geboren am 11.01.1976 Matrikelnummer: 6896 Fachhochschule Potsdam Informationswissenschaften/ Bibliothek SoSe/WiSe 2009 Erstprüfer:
Robotik und Ethik II Robotik und Ethik Diplomarbeit vorgelegt von Hardy Krüger geboren am 11.01.1976 Matrikelnummer: 6896 Fachhochschule Potsdam Informationswissenschaften/ Bibliothek SoSe/WiSe 2009 Erstprüfer:
Roboter in der Automobilindustrie
 Roboter in der Automobilindustrie Dr. Dirk Jacob, KUKA Roboter GmbH Die Geschichte der Robotik ist eng mit der Automobilindustrie verknüpft. In keiner anderen Branche sind mehr Industrieroboter im Einsatz.
Roboter in der Automobilindustrie Dr. Dirk Jacob, KUKA Roboter GmbH Die Geschichte der Robotik ist eng mit der Automobilindustrie verknüpft. In keiner anderen Branche sind mehr Industrieroboter im Einsatz.
Eine prototypische Realisierung, den humanoiden Roboter Elektro, stellte 1939 die Firma Westinghouse auf der Weltausstellung in New York vor.
 - Geschichte - Forschung und Entwicklung 1) Künstliche Intelligenz 2) Multifunktionale Arbeitsmaschine - Aktueller Entwicklungsstand - Human Robot System 1) Asimo 2) Valkyrie 3) Topio Ein humanoider Roboter
- Geschichte - Forschung und Entwicklung 1) Künstliche Intelligenz 2) Multifunktionale Arbeitsmaschine - Aktueller Entwicklungsstand - Human Robot System 1) Asimo 2) Valkyrie 3) Topio Ein humanoider Roboter
Rechtsfragen der Robotik Rechtlich gesehen: Der Roboter als softwaregesteuerte, bewegliche und zum Teil autonome Maschine
 Rechtlich gesehen: Der Roboter als softwaregesteuerte, bewegliche und zum Teil autonome Maschine von Dr. Thomas Söbbing, LL.M. Einleitung Definition, Modelle, Statistik Thema Robotik ist in Deutschland
Rechtlich gesehen: Der Roboter als softwaregesteuerte, bewegliche und zum Teil autonome Maschine von Dr. Thomas Söbbing, LL.M. Einleitung Definition, Modelle, Statistik Thema Robotik ist in Deutschland
Bachelor-/Studienarbeit
 Bachelor-/Studienarbeit, Zur Wartung und Unterstützung der Entwicklung existiert ein auf RCP/Eclipse basierendes Kontrollprogramm, welches die Kommunikation und Administration der Roboter über einen lokalen
Bachelor-/Studienarbeit, Zur Wartung und Unterstützung der Entwicklung existiert ein auf RCP/Eclipse basierendes Kontrollprogramm, welches die Kommunikation und Administration der Roboter über einen lokalen
Roboter - Künstliche Lebewesen von Science Fiction in den Alltag. Prof. Dr. rer. nat. Sabina Jeschke. IMA/ZLW & IfU der RWTH Aachen University
 Roboter - Künstliche Lebewesen von Science Fiction in den Alltag Prof. Dr. rer. nat. IMA/ZLW & IfU der RWTH Aachen University Fakultät für Maschinenwesen KinderUni RWTH Aachen Aachen, April 2012 www.ima-zlw-ifu.rwth-aachen.de
Roboter - Künstliche Lebewesen von Science Fiction in den Alltag Prof. Dr. rer. nat. IMA/ZLW & IfU der RWTH Aachen University Fakultät für Maschinenwesen KinderUni RWTH Aachen Aachen, April 2012 www.ima-zlw-ifu.rwth-aachen.de
FHZ. K01 Geschichte des Computers. Lernziele. Hochschule Technik+Architektur Luzern. Inhalt
 Inhalt 1. Geschichte Folie 1 Lernziele Sie kennen die wichtigsten Punkte in der Geschichte des Computers Sie sind mit einigen Begriffen vertraut Folie 2 Seite 1 Computer als elektronische Rechenmaschine:
Inhalt 1. Geschichte Folie 1 Lernziele Sie kennen die wichtigsten Punkte in der Geschichte des Computers Sie sind mit einigen Begriffen vertraut Folie 2 Seite 1 Computer als elektronische Rechenmaschine:
Algorithmus, siehe (1)
") Der Computer als elektronische Rechenmaschine entstand in den vierziger Jahren des 20. Jahrhunderts. Die Gedankenwelt der Informatik lässt sich aber bedeutend weiter zurückverfolgen. Mit diesem Kapitel
Der Computer als elektronische Rechenmaschine entstand in den vierziger Jahren des 20. Jahrhunderts. Die Gedankenwelt der Informatik lässt sich aber bedeutend weiter zurückverfolgen. Mit diesem Kapitel
Working Brief 6 (Quelle: http://www.wimi-care.de/outputs.html#briefs)
") Förderung des Wissenstransfers für eine aktive Mitgestaltung des Pflegesektors durch Mikrosystemtechnik http://www.wimi-care.de Gefördert vom Bundesministerium für Bildung und Forschung Förderkennzeichen:
Förderung des Wissenstransfers für eine aktive Mitgestaltung des Pflegesektors durch Mikrosystemtechnik http://www.wimi-care.de Gefördert vom Bundesministerium für Bildung und Forschung Förderkennzeichen:
Robotertechnik. Aus drucktechnischen Gründen leere Folie!
 Begleitfolien zum Wahlpflichtfach Studiengang Technische Informatik Von Prof. Dr.-Ing. Heinz Linnemann 1. Einführung 2. Einteilung, Anwendungsfelder, Märkte 3. Bauformen von Industrierobotern 4. Roboterkinematiken
Begleitfolien zum Wahlpflichtfach Studiengang Technische Informatik Von Prof. Dr.-Ing. Heinz Linnemann 1. Einführung 2. Einteilung, Anwendungsfelder, Märkte 3. Bauformen von Industrierobotern 4. Roboterkinematiken
Der mechanische Sklave: mechanische Intelligenz und intelligente
 Der mechanische Sklave: mechanische Intelligenz und intelligente Mechanik (Henner Schneider, Fb Informatik, FH Darmstadt) Die ursprünglich im Bereich der Prozeßrechentechnik begonnene Automatisierung von
Der mechanische Sklave: mechanische Intelligenz und intelligente Mechanik (Henner Schneider, Fb Informatik, FH Darmstadt) Die ursprünglich im Bereich der Prozeßrechentechnik begonnene Automatisierung von
Industrieroboter Neue Fertigungstechnologien aufgrund roboterbasierter Automatisierung
 Industrieroboter Neue Fertigungstechnologien aufgrund roboterbasierter Automatisierung 07.05.2014 Dipl.-Ing. Michael Bauer, Sales KUKA Roboter CEE GmbH KUKA Roboter GmbH Sales Michael Bauer 07.05.2014
Industrieroboter Neue Fertigungstechnologien aufgrund roboterbasierter Automatisierung 07.05.2014 Dipl.-Ing. Michael Bauer, Sales KUKA Roboter CEE GmbH KUKA Roboter GmbH Sales Michael Bauer 07.05.2014
Studentische Mitarbeit im Labor CIM & Robotik
 Prof. Dipl.-Ing. Georg Stark Fakultät für Informatik, HS Augsburg Inhalt: Studentische Mitarbeit im Labor CIM & Robotik 1 Robotik als Schlüsselwissenschaft 2 Eigene Robotersteuerung MRobot 3 Durchgeführte
Prof. Dipl.-Ing. Georg Stark Fakultät für Informatik, HS Augsburg Inhalt: Studentische Mitarbeit im Labor CIM & Robotik 1 Robotik als Schlüsselwissenschaft 2 Eigene Robotersteuerung MRobot 3 Durchgeführte
Termine und FileMaker
 Termine und FileMaker Roland Schneider TAO SOLUTIONS Roland Schneider TAO SOLUTIONS TAO SOLUTIONS seit 1996 am Markt individuelle Anwendungen auf Basis von FileMaker Pro Beratung von Unternehmen bei der
Termine und FileMaker Roland Schneider TAO SOLUTIONS Roland Schneider TAO SOLUTIONS TAO SOLUTIONS seit 1996 am Markt individuelle Anwendungen auf Basis von FileMaker Pro Beratung von Unternehmen bei der
Assistenz im Alter: Bedarfsorientierte Technikentwicklung InHaus, 04.11.2010. Robotik und andere Technologien in der Pflege
 Assistenz im Alter: Bedarfsorientierte Technikentwicklung InHaus, 04.11.2010 Robotik und andere Technologien in der Pflege Prof. Dr. Barbara Klein Bild: Barbara Klein 2008 Bild: Barbara Klein 2010 15.01.2010
Assistenz im Alter: Bedarfsorientierte Technikentwicklung InHaus, 04.11.2010 Robotik und andere Technologien in der Pflege Prof. Dr. Barbara Klein Bild: Barbara Klein 2008 Bild: Barbara Klein 2010 15.01.2010
KogTeS. Studienschwerpunkt. Kognitive Technische Systeme. (Bachelor / Master) Verfahren der Computational Intelligence
 Verfahren der Computational Intelligence") Studienschwerpunkt Kognitive Technische Systeme Verfahren der Computational Intelligence Interaktive Mobile Assistenzroboter Compiler Interpreter KogTeS Kognitive Technische Systeme (Bachelor / Master)
Studienschwerpunkt Kognitive Technische Systeme Verfahren der Computational Intelligence Interaktive Mobile Assistenzroboter Compiler Interpreter KogTeS Kognitive Technische Systeme (Bachelor / Master)
Roboter- und Automatisierungstechnik
 Roboter- und Automatisierungstechnik Hochschule Bremerhaven WS 2006/2007 Dr. Theo Hengstermann Prof. Dr. Oliver Zielinski Organisatorisches Dozenten: Studiengänge: Start: MAR und VAT Prof. Dr. Oliver Zielinski
Roboter- und Automatisierungstechnik Hochschule Bremerhaven WS 2006/2007 Dr. Theo Hengstermann Prof. Dr. Oliver Zielinski Organisatorisches Dozenten: Studiengänge: Start: MAR und VAT Prof. Dr. Oliver Zielinski
Pressespiegel Online Medien
 PG James: 2. Live-Demonstration bei IKEA "James hat dazugelernt: robots@home sind Helden des Alltags" Pressespiegel Online Medien August 2010 TU Wien, Büro für Öffentlichkeitsarbeit, 1040 Wien, Operngasse
PG James: 2. Live-Demonstration bei IKEA "James hat dazugelernt: robots@home sind Helden des Alltags" Pressespiegel Online Medien August 2010 TU Wien, Büro für Öffentlichkeitsarbeit, 1040 Wien, Operngasse
Reihe: Treff Schülerwissen/ Sie waren die Ersten. Entdecker, Erfinder, Abenteurer. Verlag oz velber, 2003 ISBN: 3-89858-226-4.
 Reihe: Treff Schülerwissen Sie waren die Ersten Entdecker, Erfinder, Abenteurer Verlag oz velber, 2003 ISBN: 3-89858-226-4 Inhalt: In diesem Buch finden sich spannende Informationen, packende Reportagen,
Reihe: Treff Schülerwissen Sie waren die Ersten Entdecker, Erfinder, Abenteurer Verlag oz velber, 2003 ISBN: 3-89858-226-4 Inhalt: In diesem Buch finden sich spannende Informationen, packende Reportagen,
Gewinde- Herstellung. 200 bis 1850
 Gewinde- Herstellung 200 bis 1850 Um 400 vor CHR.:Erfindung der Schraube Wikipedia, Archytas von Taren, 2009 Die Erfindung der Schraube wird dem Pythagoräer Philosophen und Mathematiker Archyta s von Ta
Gewinde- Herstellung 200 bis 1850 Um 400 vor CHR.:Erfindung der Schraube Wikipedia, Archytas von Taren, 2009 Die Erfindung der Schraube wird dem Pythagoräer Philosophen und Mathematiker Archyta s von Ta
Grundlagen der Technischen Informatik. Einführung. Kapitel 1.1
 Grundlagen der Technischen Informatik Einführung Kapitel 1.1 Prof. Dr.-Ing. Jürgen Teich Lehrstuhl für Hardware-Software-Co-Design Einordnung des Lehrstuhls Universität Erlangen-Nürnberg 5 Fakultäten über
Grundlagen der Technischen Informatik Einführung Kapitel 1.1 Prof. Dr.-Ing. Jürgen Teich Lehrstuhl für Hardware-Software-Co-Design Einordnung des Lehrstuhls Universität Erlangen-Nürnberg 5 Fakultäten über
To Mars and Beyond. Ein Streifzug durch die moderne Robotik. Univ.-Prof. Dr. rer. nat. Sabina Jeschke. Wissenschaftsnacht 09.
 To Mars and Beyond Ein Streifzug durch die moderne Robotik Univ.-Prof. Dr. rer. nat. Wissenschaftsnacht 09. November 2012 Institutscluster IMA/ZLW & IfU der RWTH Aachen University Fakultät für Maschinenwesen
To Mars and Beyond Ein Streifzug durch die moderne Robotik Univ.-Prof. Dr. rer. nat. Wissenschaftsnacht 09. November 2012 Institutscluster IMA/ZLW & IfU der RWTH Aachen University Fakultät für Maschinenwesen
Einführung in die Informatik
 Einführung in die Informatik Geschichte und Einteilung der Informatik 01101101 01011001 11010011 10011000 00000011 00011100 01111111 11111111 00110100 00101110 11101110 01110010 10011101 00111010 2 Der
Einführung in die Informatik Geschichte und Einteilung der Informatik 01101101 01011001 11010011 10011000 00000011 00011100 01111111 11111111 00110100 00101110 11101110 01110010 10011101 00111010 2 Der
Ingenieurskunst Von der Idee zum Produkt
 Ingenieurskunst Von der Idee zum Produkt»Brandneu gerade erst eingetroffen!«steht in großen Buch staben im Werbeprospekt des Elektronikmarktes. Doch bevor ein technisches Produkt im Handel erhältlich ist,
Ingenieurskunst Von der Idee zum Produkt»Brandneu gerade erst eingetroffen!«steht in großen Buch staben im Werbeprospekt des Elektronikmarktes. Doch bevor ein technisches Produkt im Handel erhältlich ist,
Unterrichtsmaterialien in digitaler und in gedruckter Form. Auszug aus: Erfinder- & Entdecker-Kartei. Das komplette Material finden Sie hier:
 Unterrichtsmaterialien in digitaler und in gedruckter Form Auszug aus: Erfinder- & Entdecker-Kartei Das komplette Material finden Sie hier: School-Scout.de Die Autorin: Katharina Lindemann hat Sonderpädagogik
Unterrichtsmaterialien in digitaler und in gedruckter Form Auszug aus: Erfinder- & Entdecker-Kartei Das komplette Material finden Sie hier: School-Scout.de Die Autorin: Katharina Lindemann hat Sonderpädagogik
Evaluierung und Implementierung eines Konzeptes für die autonome Orientierung eines humanoiden Roboters. Masterarbeit Christian A.
 Technische Hochschule Nürnberg Georg-Simon-Ohm Fakultät Informatik Wintersemester 2012/13 Evaluierung und Implementierung eines Konzeptes für die autonome Orientierung eines humanoiden Roboters anhand
Technische Hochschule Nürnberg Georg-Simon-Ohm Fakultät Informatik Wintersemester 2012/13 Evaluierung und Implementierung eines Konzeptes für die autonome Orientierung eines humanoiden Roboters anhand
GESCHICHTE DER COMPUTERTECHNIK
 GESCHICHTE DER COMPUTERTECHNIK Rebekka Mönch Projekt ://reisefieber WS 2005/06 Bauhaus-Universität Weimar Ich glaube, dass es auf der Welt einen Bedarf von vielleicht fünf Computern geben wird. Künftige
GESCHICHTE DER COMPUTERTECHNIK Rebekka Mönch Projekt ://reisefieber WS 2005/06 Bauhaus-Universität Weimar Ich glaube, dass es auf der Welt einen Bedarf von vielleicht fünf Computern geben wird. Künftige
spiel mit technik Idee Spiel mit Technik Kernthesen
 automaten spiele androiden herrschaft kampf robo- mensch illusionen maschine licht spiel spiel krieg illusion spiel sport bälle spiel risiko räder spannungdampf risiko mikrochips risiko maschinen pong
automaten spiele androiden herrschaft kampf robo- mensch illusionen maschine licht spiel spiel krieg illusion spiel sport bälle spiel risiko räder spannungdampf risiko mikrochips risiko maschinen pong
Einmalige Robotershow Robots on Tour
 Einmalige Robotershow Robots on Tour Zum 25-Jahre-Jubiläum und Weltkongress Robots on Tour des Labors für Künstliche Intelligenz der Universität Zürich (AI Lab) kommen am 9. März 2013 Interessierte, Robotikfans
Einmalige Robotershow Robots on Tour Zum 25-Jahre-Jubiläum und Weltkongress Robots on Tour des Labors für Künstliche Intelligenz der Universität Zürich (AI Lab) kommen am 9. März 2013 Interessierte, Robotikfans
Eine Einführung zum numerischen Programmieren mit Excel
 Eine Einführung zum numerischen Programmieren mit Excel Bastian Gross Universität Trier 30. April 2012 Bastian Gross (Universität Trier) Excel/OpenOffice Kurs 2012 1/36 30. April 2012 1 / 36 Inhaltsverzeichnis
Eine Einführung zum numerischen Programmieren mit Excel Bastian Gross Universität Trier 30. April 2012 Bastian Gross (Universität Trier) Excel/OpenOffice Kurs 2012 1/36 30. April 2012 1 / 36 Inhaltsverzeichnis
Informatik studieren an der Universität zu Lübeck
 Informatik studieren an der Universität zu Lübeck Prof. Dr. Till Tantau Studiengangsleiter MINT Lübecker Schnuppertag 2011 Das Informatik-Studium an der Uni Lübeck...... ist angewandter. Ein Studium an
Informatik studieren an der Universität zu Lübeck Prof. Dr. Till Tantau Studiengangsleiter MINT Lübecker Schnuppertag 2011 Das Informatik-Studium an der Uni Lübeck...... ist angewandter. Ein Studium an
Die Lange Nacht der Roboter. Pressespiegel
 Die Lange Nacht der Roboter Pressespiegel November 2011 1 Headline Ausgabe ErschDatum ORF-Informationsdirektion Fernsehen Aktuelle Reportage: Lange Nacht der Roboter Winterzeit, ORF2, 17:40 Uhr 30.11.2011
Die Lange Nacht der Roboter Pressespiegel November 2011 1 Headline Ausgabe ErschDatum ORF-Informationsdirektion Fernsehen Aktuelle Reportage: Lange Nacht der Roboter Winterzeit, ORF2, 17:40 Uhr 30.11.2011
Geschichte des Computers. Die Geschichte des Computers
 Die Geschichte des Computers Die Entwicklung macht vor niemandem Halt! Woher kommen die Zahlen? Die ersten primitiven Zahlenzeichen entstanden ca. 30 000 Jahre v. Chr. Die ersten bekannten Schriftsysteme
Die Geschichte des Computers Die Entwicklung macht vor niemandem Halt! Woher kommen die Zahlen? Die ersten primitiven Zahlenzeichen entstanden ca. 30 000 Jahre v. Chr. Die ersten bekannten Schriftsysteme
Informatik studieren an der Universität zu Lübeck
 Informatik studieren an der Universität zu Lübeck Prof. Dr. Till Tantau Studiendekan Technisch-Naturwissenschaftliche Fakultät Universität zu Lübeck Das Informatik-Studium an der Uni Lübeck...... ist angewandter.
Informatik studieren an der Universität zu Lübeck Prof. Dr. Till Tantau Studiendekan Technisch-Naturwissenschaftliche Fakultät Universität zu Lübeck Das Informatik-Studium an der Uni Lübeck...... ist angewandter.
Internationale Kooperationen Technik und Recht
 Internationale Kooperationen Technik und Recht Kooperationen mit der Stanford University & Rückblick auf den 2nd Annual Workshop on Road Vehicle Automation, Stanford 2013 Severin Löffler Wissenschaftlicher
Internationale Kooperationen Technik und Recht Kooperationen mit der Stanford University & Rückblick auf den 2nd Annual Workshop on Road Vehicle Automation, Stanford 2013 Severin Löffler Wissenschaftlicher
Kybernetik in Japan Roboter und Cyborg
 Kybernetik in Japan Roboter und Cyborg TAKAHASHI Tōru Faculty of Letters, Arts and Sciences Waseda University Für die Einladung zu diesem Symposium danke ich dem Japanisch- Deutschen Zentrum Berlin und
Kybernetik in Japan Roboter und Cyborg TAKAHASHI Tōru Faculty of Letters, Arts and Sciences Waseda University Für die Einladung zu diesem Symposium danke ich dem Japanisch- Deutschen Zentrum Berlin und
Herzlich willkommen zum Workshop
 Spring 2011 SIDAR - Graduierten-Workshop über Reaktive Sicherheit 21.-22. März 2011 Bochum, Deutschland Herzlich willkommen zum Workshop Sebastian Uellenbeck (HGI/RUB) 1/18 Idee des Spring Workshops Ziele
Spring 2011 SIDAR - Graduierten-Workshop über Reaktive Sicherheit 21.-22. März 2011 Bochum, Deutschland Herzlich willkommen zum Workshop Sebastian Uellenbeck (HGI/RUB) 1/18 Idee des Spring Workshops Ziele
Willkommen in der fischertechnik Computing Welt 3 Über dieses Begleitheft 3. Industrieroboter 4
 Inhalt Willkommen in der fischertechnik Computing Welt 3 Über dieses Begleitheft 3 Industrieroboter 4 Bauteilerklärungen 5 Das ist alles im Baukasten mit drin 5 Aktoren 5 Encodermotoren 5 XS-Motoren 5
Inhalt Willkommen in der fischertechnik Computing Welt 3 Über dieses Begleitheft 3 Industrieroboter 4 Bauteilerklärungen 5 Das ist alles im Baukasten mit drin 5 Aktoren 5 Encodermotoren 5 XS-Motoren 5
Geschichte der Informatik
 Entwicklung von Informationstechnik und Durchdringung des Alltags seit der 2. Hälfte des 20 Jahrhunderts explosionsartig Informationsgesellschaft Zunehmende Bedeutung und Wert von Informationen Schnelle
Entwicklung von Informationstechnik und Durchdringung des Alltags seit der 2. Hälfte des 20 Jahrhunderts explosionsartig Informationsgesellschaft Zunehmende Bedeutung und Wert von Informationen Schnelle
Prädikatenlogik in der Praxis. Richard Cubek (Teil der Master Thesis, 2011)
") Richard Cubek (Teil der Master Thesis, 2011 Übersicht Symbolische Repräsentationen in der KI Planning Domain Definition Language (PDDL Anwendungsbeispiel aus der Servicerobotik Symbolische Repräsentationen
Richard Cubek (Teil der Master Thesis, 2011 Übersicht Symbolische Repräsentationen in der KI Planning Domain Definition Language (PDDL Anwendungsbeispiel aus der Servicerobotik Symbolische Repräsentationen
Berufsstart. Studiengangsperspektive. Automatisierungstechnik. Studiengangsperspektive. Bewerbungstipps und Jobangebote unter berufsstart.
 Berufsstart Studiengangsperspektive Automatisierungstechnik Studiengangsperspektive Bewerbungstipps und Jobangebote unter berufsstart.de Was ist Automatisierungstechnik? Ein Beitrag von Prof. Dr.-Ing.
Berufsstart Studiengangsperspektive Automatisierungstechnik Studiengangsperspektive Bewerbungstipps und Jobangebote unter berufsstart.de Was ist Automatisierungstechnik? Ein Beitrag von Prof. Dr.-Ing.
Energie, Wirtschaft und Gesellschaft: Eine Zeitreise. Werner Watzenig
 Energie, Wirtschaft und Gesellschaft: Eine Zeitreise Werner Watzenig Energiebedarf eines Menschen 130 kwh 50 kwh 10 kwh 2,4 kwh Steinzeit Ackerbau 21. Jahrhundert http://4.bp.blogspot.com/-iwoul9yfbcc/uznst6nft-i/aaaaaaaavxc/4fddhaod4aw/s1600/%c2%a9+tempakul+-+fotolia.com.jpg
Energie, Wirtschaft und Gesellschaft: Eine Zeitreise Werner Watzenig Energiebedarf eines Menschen 130 kwh 50 kwh 10 kwh 2,4 kwh Steinzeit Ackerbau 21. Jahrhundert http://4.bp.blogspot.com/-iwoul9yfbcc/uznst6nft-i/aaaaaaaavxc/4fddhaod4aw/s1600/%c2%a9+tempakul+-+fotolia.com.jpg
Meine Ideen gegen die Hitze: Meine Ideen gegen die Kälte: Unsere Reise zum Merkur
 Der Merkur ist der Planet, der am nächsten an der Sonne liegt. Tagsüber ist es auf dem Merkur sehr heiss. Es sind bis zu 400 C. Das ist viermal so heiss wie auf einer heissen Herdplatte. Nachts wird es
Der Merkur ist der Planet, der am nächsten an der Sonne liegt. Tagsüber ist es auf dem Merkur sehr heiss. Es sind bis zu 400 C. Das ist viermal so heiss wie auf einer heissen Herdplatte. Nachts wird es
Kuka und Siemens. Ein starkes Team für Ihre Roboter-Applikationen
 Kuka und Siemens Ein starkes Team für Ihre Roboter-Applikationen Eine Geschichte von Ideen und revolutionären Entwicklungen Johann Keller und Jakob Knappich, Augsburg Die Erfolgsgeschichte technischer
Kuka und Siemens Ein starkes Team für Ihre Roboter-Applikationen Eine Geschichte von Ideen und revolutionären Entwicklungen Johann Keller und Jakob Knappich, Augsburg Die Erfolgsgeschichte technischer
Brückenkurs / Computer
 Brückenkurs / Computer Sebastian Stabinger IIS 22 September 2014 1 / 24 Content 1 Allgemeines zum Studium 2 Was ist ein Computer? 3 Geschichte des Computers 4 Komponenten eines Computers 5 Aufbau eines
Brückenkurs / Computer Sebastian Stabinger IIS 22 September 2014 1 / 24 Content 1 Allgemeines zum Studium 2 Was ist ein Computer? 3 Geschichte des Computers 4 Komponenten eines Computers 5 Aufbau eines
Beispielprüfung. Deutsch: Textwiedergabe/produktive Aufgabe. Kurs: Moderne Autos für heute und morgen
 Beispielprüfung Fach: Kurs: Hilfsmittel: Zeit: Deutsch: Textwiedergabe/produktive Aufgabe T einsprachiges Wörterbuch 120 Minuten Moderne Autos für heute und morgen Der Elektroantrieb war ein beherrschendes
Beispielprüfung Fach: Kurs: Hilfsmittel: Zeit: Deutsch: Textwiedergabe/produktive Aufgabe T einsprachiges Wörterbuch 120 Minuten Moderne Autos für heute und morgen Der Elektroantrieb war ein beherrschendes
Die Fraunhofer-Gesellschaft 2004
 Die Fraunhofer-Gesellschaft 2004 Rostock Bremen Dortmund Hannover Berlin Dresden Darmstadt Saarbrücken Freiburg Karlsruhe Stuttgart München 57 Institute an 40 Standorten 12.700 Mitarbeiter 1 Mrd. Budget
Die Fraunhofer-Gesellschaft 2004 Rostock Bremen Dortmund Hannover Berlin Dresden Darmstadt Saarbrücken Freiburg Karlsruhe Stuttgart München 57 Institute an 40 Standorten 12.700 Mitarbeiter 1 Mrd. Budget
= â~ëëéä= = = ìåáîéêëáíó= = éêéëë= = = = = = = = = = = = = = = = = = = jéåëåüjoçäçíéê=fåíéê~âíáçåw== báåé=ëéê~åüïáëëéåëåü~ñíäáåüé=méêëééâíáîé=
 = â~ëëéä= = = ìåáîéêëáíó= = éêéëë= = = = = = = = = = = = = = = = = = = jéåëåüjoçäçíéê=fåíéê~âíáçåw== báåé=ëéê~åüïáëëéåëåü~ñíäáåüé=méêëééâíáîé= Frauke Zeller Die vorliegende Arbeit wurde vom Fachbereich
= â~ëëéä= = = ìåáîéêëáíó= = éêéëë= = = = = = = = = = = = = = = = = = = jéåëåüjoçäçíéê=fåíéê~âíáçåw== báåé=ëéê~åüïáëëéåëåü~ñíäáåüé=méêëééâíáîé= Frauke Zeller Die vorliegende Arbeit wurde vom Fachbereich
Informatik Mensch Gesellschaft. Historische Entwicklung der Informationstechnik (von Anfang bis Heute)
") Informatik Mensch Gesellschaft Historische Entwicklung der Informationstechnik (von Anfang bis Heute) Algorithmen-Automat Schritt-für-Schritt-Anleitung zum Lösen mathematischer Probleme kann immer wieder
Informatik Mensch Gesellschaft Historische Entwicklung der Informationstechnik (von Anfang bis Heute) Algorithmen-Automat Schritt-für-Schritt-Anleitung zum Lösen mathematischer Probleme kann immer wieder
Thermal Drilling in Planetary Ices:
 : An Analytic Solution with Application to Planetary Protection Problems of Radioisotope Power Sources December 12 th, 2012 Wolfgang Sakuler Einleitung Eis-Monde Europa, Enceladus, Titan: Quelle: http://de.wikipedia.org/wiki/europa_(mond)
: An Analytic Solution with Application to Planetary Protection Problems of Radioisotope Power Sources December 12 th, 2012 Wolfgang Sakuler Einleitung Eis-Monde Europa, Enceladus, Titan: Quelle: http://de.wikipedia.org/wiki/europa_(mond)
Presse-Information. Factsheet Bosch InterCampus Program USA. 17. Mai 2011 PI 7364 RB DH
 Presse-Information Factsheet Bosch InterCampus Program USA 17. Mai 2011 PI 7364 RB DH Leistungsstarke und umweltfreundliche Energienutzung steht im Mittelpunkt des Engagements von Bosch in den USA. Junge
Presse-Information Factsheet Bosch InterCampus Program USA 17. Mai 2011 PI 7364 RB DH Leistungsstarke und umweltfreundliche Energienutzung steht im Mittelpunkt des Engagements von Bosch in den USA. Junge
Mechatronik und Automatisierungstechnik an der FH Amberg-Weiden
 Mechatronik und Automatisierungstechnik an der FH Amberg-Weiden Fachbereich Maschinenbau/ Umwelttechnik Prof. Dr.-Ing. Bernhard Frenzel Seite 1 Inhaltsübersicht Strukturen Labore und Einrichtungen Projekte
Mechatronik und Automatisierungstechnik an der FH Amberg-Weiden Fachbereich Maschinenbau/ Umwelttechnik Prof. Dr.-Ing. Bernhard Frenzel Seite 1 Inhaltsübersicht Strukturen Labore und Einrichtungen Projekte
1. Einleitung. 1.1. Ausgangssituation
 1. Einleitung In der vorliegenden Arbeit wird untersucht, welche Faktoren den erfolgreichen Ausgang eines Supply-Chain-Projektes zwischen zwei Projektpartnern beeinflussen. Dazu werden zum einen mögliche
1. Einleitung In der vorliegenden Arbeit wird untersucht, welche Faktoren den erfolgreichen Ausgang eines Supply-Chain-Projektes zwischen zwei Projektpartnern beeinflussen. Dazu werden zum einen mögliche
von mobilen Diensten für Studierende
 Weiterentwicklung und Evaluierung von mobilen Diensten für Studierende Abschlusspräsentation der Bachelorarbeit von Lorenz Schauer Bearbeitungszeitraum: 26.04.2010 bis 13.09.2010 Betreuer: Dipl.-Medieninf.
Weiterentwicklung und Evaluierung von mobilen Diensten für Studierende Abschlusspräsentation der Bachelorarbeit von Lorenz Schauer Bearbeitungszeitraum: 26.04.2010 bis 13.09.2010 Betreuer: Dipl.-Medieninf.
LIEBE ZUM DETAIL. Liebe Sammler,
 LIEBE ZUM DETAIL er die Geschehnisse in der Kunstszene der letzten Jahre beobachtete, konnte feststellen, dass sie sich zunehmend wieder der Kunst längst vergangener Epochen zuwendet. Vor allem die Werke
LIEBE ZUM DETAIL er die Geschehnisse in der Kunstszene der letzten Jahre beobachtete, konnte feststellen, dass sie sich zunehmend wieder der Kunst längst vergangener Epochen zuwendet. Vor allem die Werke
Lernumgebungen fürs Programmieren: Karas... und Turtles
 Lernumgebungen fürs Programmieren: Karas und die Turtles Raimond Reichert raimond.reichert@acm.org beta Eine Kernidee der Informatik: Computer formales System Intuition Formale Beschreibung Das Ziel: Algorithmisches
Lernumgebungen fürs Programmieren: Karas und die Turtles Raimond Reichert raimond.reichert@acm.org beta Eine Kernidee der Informatik: Computer formales System Intuition Formale Beschreibung Das Ziel: Algorithmisches
Ein Informationsdienst des Deutschen Zentrums für Luft- und Raumfahrt (DLR) www.dlr.de/schulinfo
 www.dlr.de/schulinfo") Materialien für den naturwissenschaftlichen Projektunterricht Ausgabe 1/2006 Robotik GEFÖRDERT VOM Ein Informationsdienst des Deutschen Zentrums für Luft- und Raumfahrt (DLR) www.dlr.de/schulinfo Sie können
Materialien für den naturwissenschaftlichen Projektunterricht Ausgabe 1/2006 Robotik GEFÖRDERT VOM Ein Informationsdienst des Deutschen Zentrums für Luft- und Raumfahrt (DLR) www.dlr.de/schulinfo Sie können
Chancen und Risiken von Open Innovation
 Chancen und Risiken von Open Innovation Zürich, 24. November 2009 Warum sind die Zuschauer besser? Folie 2 Warum immer der Publikumsjoker? Folie 3 Die Antwort lautet The Wisdom of Crowds Die Weisheit der
Chancen und Risiken von Open Innovation Zürich, 24. November 2009 Warum sind die Zuschauer besser? Folie 2 Warum immer der Publikumsjoker? Folie 3 Die Antwort lautet The Wisdom of Crowds Die Weisheit der
Robotik und Vision weltweit auf dem Vormarsch
 Robotik und Vision weltweit auf dem Vormarsch VMT Technologie Workshop Mannheim, 6./7. Oktober 2015 Patrick Schwarzkopf Über uns Bilder (von unten nach oben): Basler AG, Festo AG & Co. KG, Carl Cloos Schweisstechnik
Robotik und Vision weltweit auf dem Vormarsch VMT Technologie Workshop Mannheim, 6./7. Oktober 2015 Patrick Schwarzkopf Über uns Bilder (von unten nach oben): Basler AG, Festo AG & Co. KG, Carl Cloos Schweisstechnik
Technische Informatik I
 Technische Informatik I SS 2001 PD Dr. A. Strey Abteilung Neuroinformatik Universität Ulm Inhalt Einführung: Überblick über die historische Entwicklung der Rechnerhardware Teil 1: Digitale Logik kurzer
Technische Informatik I SS 2001 PD Dr. A. Strey Abteilung Neuroinformatik Universität Ulm Inhalt Einführung: Überblick über die historische Entwicklung der Rechnerhardware Teil 1: Digitale Logik kurzer
Wissensquizspiel (WQS)
") Rechnungswesen kompetenzorientiert lernen, Rechnungswesen gehirn-gerecht lernen, an die Wurzeln gehen (In memoriam Vera F. Birkenbihl) Mag. Gerhard Pflügelmayr Mmag. Uwe Gutwirth Mag. Thomas Schöpf www.rw-interaktiv.at
Rechnungswesen kompetenzorientiert lernen, Rechnungswesen gehirn-gerecht lernen, an die Wurzeln gehen (In memoriam Vera F. Birkenbihl) Mag. Gerhard Pflügelmayr Mmag. Uwe Gutwirth Mag. Thomas Schöpf www.rw-interaktiv.at
Informatik im Studiengang Allgemeiner Maschinenbau Sommersemester 2014
 Informatik im Studiengang Allgemeiner Maschinenbau Sommersemester 2014 Prof. Dr.-Ing. habil. Peter Sobe Fakultät Informatik / Mathematik Zur Person: Prof. Dr.-Ing. habil. Peter Sobe Fakultät Informatik/Mathematik
Informatik im Studiengang Allgemeiner Maschinenbau Sommersemester 2014 Prof. Dr.-Ing. habil. Peter Sobe Fakultät Informatik / Mathematik Zur Person: Prof. Dr.-Ing. habil. Peter Sobe Fakultät Informatik/Mathematik
Geotechnik Prof. Dr. Jürgen Quarg-Vonscheidt
 Prof. Dr. Jürgen Quarg-Vonscheidt wie alles anfängt Wer hohe h Türme bauen will, muss lange beim Fundament verweilen. Anton Bruckner, Komponist und Organist * 04. 09. 1824 - Ansfelden 04. 09. 1824 Ansfelden
Prof. Dr. Jürgen Quarg-Vonscheidt wie alles anfängt Wer hohe h Türme bauen will, muss lange beim Fundament verweilen. Anton Bruckner, Komponist und Organist * 04. 09. 1824 - Ansfelden 04. 09. 1824 Ansfelden
Dr. Kathleen Stürmer. Persönliche Informationen. Forschungsinteressen. Abschlüsse. Curriculum Vitae Kathleen Stürmer
 Dr. Kathleen Stürmer Persönliche Informationen Wissenschaftliche Assistentin (Habilitandin) Friedl Schöller Stiftungslehrstuhl für Unterrichts- und Hochschulforschung, TUM School of, Technische Universität
Dr. Kathleen Stürmer Persönliche Informationen Wissenschaftliche Assistentin (Habilitandin) Friedl Schöller Stiftungslehrstuhl für Unterrichts- und Hochschulforschung, TUM School of, Technische Universität
Roboter selbst bauen. Auf über 300 Seiten: Das große Praxisbuch für Einsteiger und Fortgeschrittene. Auf CD-ROM FRANZIS.
 FRANZIS EXPERIMENTE Auf CD-ROM Kompletter Quellcode zum Buch Tools zur einfachen Steuerung von Robotern Steuern vom PC aus mit dem PC to Bot Interface Datenblätter zu den verwendeten Bauteilen Ulli Sommer
FRANZIS EXPERIMENTE Auf CD-ROM Kompletter Quellcode zum Buch Tools zur einfachen Steuerung von Robotern Steuern vom PC aus mit dem PC to Bot Interface Datenblätter zu den verwendeten Bauteilen Ulli Sommer
Host Families - das Patenschaftsprogramm der Jacobs University
 Host Families - das Patenschaftsprogramm der Jacobs University Host Family Program - Workshop Uni Ulm März 2011 Jacobs University Bremen Gründung 1999, erste Studierenden seit 2001, erste Graduation 2004
Host Families - das Patenschaftsprogramm der Jacobs University Host Family Program - Workshop Uni Ulm März 2011 Jacobs University Bremen Gründung 1999, erste Studierenden seit 2001, erste Graduation 2004
Agile Programmierung: Case Studies
 Agile Programmierung: Case Studies Fachbereich Informatik Fakultät für Mathematik, Informatik und Naturwissenschaften Universität Hamburg 2015-07-07 Betreuung: Dr. Julian Kunkel 1/22 Gliederung Einfluss
Agile Programmierung: Case Studies Fachbereich Informatik Fakultät für Mathematik, Informatik und Naturwissenschaften Universität Hamburg 2015-07-07 Betreuung: Dr. Julian Kunkel 1/22 Gliederung Einfluss
Deutsche Biographie Onlinefassung
 Deutsche Biographie Onlinefassung NDB-Artikel Reinking, Karl Wilhelm Ernst Eberhard Bühnenbildner, Architekt, * 18.10.1896 Aachen, 2.7.1985 Berlin-Zehlendorf. (evangelisch) Genealogie V Karl ( 1941), Dr.,
Deutsche Biographie Onlinefassung NDB-Artikel Reinking, Karl Wilhelm Ernst Eberhard Bühnenbildner, Architekt, * 18.10.1896 Aachen, 2.7.1985 Berlin-Zehlendorf. (evangelisch) Genealogie V Karl ( 1941), Dr.,
Internet der Dinge im Bereich Smart House
 Leif Brand 3. 2. 2010; Bonn www.zt-consulting.de Klischeebeispiel: intelligenter Kühlschrank großer Touch Screen Verbindung zu Internet / Mobilfunknetzen Fernabfrage erkennt seinen Inhalt erkennt Verfallsdaten
Leif Brand 3. 2. 2010; Bonn www.zt-consulting.de Klischeebeispiel: intelligenter Kühlschrank großer Touch Screen Verbindung zu Internet / Mobilfunknetzen Fernabfrage erkennt seinen Inhalt erkennt Verfallsdaten
ELABOTrainingsSysteme Aus- und Weiterbildung GmbH. Robotics. www.elabo-ts.com
 R o b o t i c s Robot cell SafetyCUBE Technical data Operating voltage 230 V 50 / 60 Hz Number of axes 6 Maximum lifting force 3 kg (4 kg) Maximum speed 6200 mm/s Repeat accuracy ± 0.01 mm Color Teach
R o b o t i c s Robot cell SafetyCUBE Technical data Operating voltage 230 V 50 / 60 Hz Number of axes 6 Maximum lifting force 3 kg (4 kg) Maximum speed 6200 mm/s Repeat accuracy ± 0.01 mm Color Teach
T H E M E N V O R S T E L L U N G
 T H E M E N V O R S T E L L U N G Konzeption und Entwicklung einer Android-Tablet -Architektur für einen Beratungsworkflow im Online-Banking 06.10.2011 Autor: Andreas Rinner PASS Research & Development
T H E M E N V O R S T E L L U N G Konzeption und Entwicklung einer Android-Tablet -Architektur für einen Beratungsworkflow im Online-Banking 06.10.2011 Autor: Andreas Rinner PASS Research & Development
2-er Komplement: Schritt 1 von 3
 2-er Komplement: Schritt 1 von 3 Umwandlung ins Binärsystem (wir rechnen nur mit 8- oder 16-Bit) 34 10 = 100010 2 13 10 = 1101 2 312 10 = 101000 2 (9-Bit, gewählt 16-Bit!) Technische Universität Ilmenau,
2-er Komplement: Schritt 1 von 3 Umwandlung ins Binärsystem (wir rechnen nur mit 8- oder 16-Bit) 34 10 = 100010 2 13 10 = 1101 2 312 10 = 101000 2 (9-Bit, gewählt 16-Bit!) Technische Universität Ilmenau,
Programmiersprachen & Programmierung von Robotersystemen
 Programmiersprachen & Programmierung von Robotersystemen präsentiert von Hannes Ahrens Proseminar: Proseminarleiter: Anwendungen und Methoden der modernen Robotik Prof. Dr. Jianwei ZHANG Gliederung Die
Programmiersprachen & Programmierung von Robotersystemen präsentiert von Hannes Ahrens Proseminar: Proseminarleiter: Anwendungen und Methoden der modernen Robotik Prof. Dr. Jianwei ZHANG Gliederung Die
Kollaborierende Automation
 Bildquelle automationspraxis.de Kollaborierende Automation Interaktion von Mensch und Maschine 4.0 Max Edelmann, Roland Anderegg Institut für Automation FHNW 1 Inhalt Grundlagen der Automation im Umfeld
Bildquelle automationspraxis.de Kollaborierende Automation Interaktion von Mensch und Maschine 4.0 Max Edelmann, Roland Anderegg Institut für Automation FHNW 1 Inhalt Grundlagen der Automation im Umfeld
Nr. 15/2015 Woche 06.04. bis 12.04.15. Israel feiert Pessach und Ostern
 Nr. 15/2015 Woche 06.04. bis 12.04.15 Israel feiert Pessach und Ostern Mehr als 130.000 Touristen werden zu den Feiertagen in Israel erwartet. Zehntausende davon allein in Jerusalem, wo am Ostersonntag
Nr. 15/2015 Woche 06.04. bis 12.04.15 Israel feiert Pessach und Ostern Mehr als 130.000 Touristen werden zu den Feiertagen in Israel erwartet. Zehntausende davon allein in Jerusalem, wo am Ostersonntag
Brückenkurs / Computer
 Brückenkurs / Computer Sebastian Stabinger IIS 23 September 2013 Sebastian Stabinger (IIS) Brückenkurs / Computer 23 September 2013 1 / 20 Content 1 Allgemeines zum Studium 2 Was ist ein Computer? 3 Geschichte
Brückenkurs / Computer Sebastian Stabinger IIS 23 September 2013 Sebastian Stabinger (IIS) Brückenkurs / Computer 23 September 2013 1 / 20 Content 1 Allgemeines zum Studium 2 Was ist ein Computer? 3 Geschichte
Der Einsatz von Alcohol Interlock aus eignungsdiagnostischer Sicht
 Expertengespräch Alcohol Interlock Der Einsatz von Alcohol Interlock aus eignungsdiagnostischer Sicht Dr. Don DeVol Erfurt, 02.06.09 TÜV Thüringen Überblick 1. Eignungsrelevante Ergebnisse der Alcohol-Interlock
Expertengespräch Alcohol Interlock Der Einsatz von Alcohol Interlock aus eignungsdiagnostischer Sicht Dr. Don DeVol Erfurt, 02.06.09 TÜV Thüringen Überblick 1. Eignungsrelevante Ergebnisse der Alcohol-Interlock
Enics Schweiz - Ihr EMS-Partner
 Enics Schweiz - Ihr EMS-Partner Unternehmens-Präsentation - 2015 1 Wir sind Ihr Partner für Electronics Manufacturing Services (EMS). Sie finden unsere Dienstleistungen im Alltag! Wo? Sehen Sie unsere
Enics Schweiz - Ihr EMS-Partner Unternehmens-Präsentation - 2015 1 Wir sind Ihr Partner für Electronics Manufacturing Services (EMS). Sie finden unsere Dienstleistungen im Alltag! Wo? Sehen Sie unsere
Eine Einführung zum numerischen Programmieren mit Excel
 Eine Einführung zum numerischen Programmieren mit Excel Bastian Groß Nina Weiand Universität Trier 23. Juni 2014 Groß, Weiand (Universität Trier) Excel/OpenOffice Kurs 2014 1/38 23. Juni 2014 1 / 38 Inhaltsverzeichnis
Eine Einführung zum numerischen Programmieren mit Excel Bastian Groß Nina Weiand Universität Trier 23. Juni 2014 Groß, Weiand (Universität Trier) Excel/OpenOffice Kurs 2014 1/38 23. Juni 2014 1 / 38 Inhaltsverzeichnis
Der MORPHA Styleguide für icon-basiertes Programmieren 1 The MORPHA Style Guide for Icon-Based Programming
 Der MORPHA Styleguide für icon-basiertes Programmieren 1 The MORPHA Style Guide for Icon-Based Programming Dr.-Ing. Arif Kazi, Augsburg Dipl.-Ing. (FH) Markus Seyfarth, Obernburg Zusammenfassung Die Programmierung
Der MORPHA Styleguide für icon-basiertes Programmieren 1 The MORPHA Style Guide for Icon-Based Programming Dr.-Ing. Arif Kazi, Augsburg Dipl.-Ing. (FH) Markus Seyfarth, Obernburg Zusammenfassung Die Programmierung
CHIRURGIE IM 21. JAHRHUNDERT
 A VINCI COEX CHIRURGIE IM 21. JAHRHUNERT 3 Intuition Erfind Ideen ie Vision W er verändern will, muss handeln. Am Anfang steht immer die Idee, aus der heraus der Wille geboren wird, diese umzusetzen. Was
A VINCI COEX CHIRURGIE IM 21. JAHRHUNERT 3 Intuition Erfind Ideen ie Vision W er verändern will, muss handeln. Am Anfang steht immer die Idee, aus der heraus der Wille geboren wird, diese umzusetzen. Was
Projekt im Sommersemester 2008. Complex and Distributed IT-Systems TU Berlin
 Virtuelle Systeme Projekt im Sommersemester 2008 Complex and Distributed IT-Systems TU Berlin Beispiel: VMWare 24.10.2007 CIT, Einführung Projekt Virtualisierung 2 Virtualisierung 24.10.2007 CIT, Einführung
Virtuelle Systeme Projekt im Sommersemester 2008 Complex and Distributed IT-Systems TU Berlin Beispiel: VMWare 24.10.2007 CIT, Einführung Projekt Virtualisierung 2 Virtualisierung 24.10.2007 CIT, Einführung
Erfinderinnen und Erfinder (A)
") Erfinderinnen und Erfinder (A) Wie heißen diese Personen? Wer ist der/die älteste Erfinder/in, wer der/die jüngste? Was haben sie erfunden? Trage den Namen, das Geburtsjahr und die Erfindung/en ein! Name
Erfinderinnen und Erfinder (A) Wie heißen diese Personen? Wer ist der/die älteste Erfinder/in, wer der/die jüngste? Was haben sie erfunden? Trage den Namen, das Geburtsjahr und die Erfindung/en ein! Name
HNF ZEIT- FENSTER. Glanzstücke der Technikgeschichte
 HNF ZEIT- FENSTER Glanzstücke der Technikgeschichte Vorwort 3 5 6 8 10 12 14 16 18 20 22 24 26 Inhalt Vorwort Dr. Richard Böger Vorwort Norbert Ryska Drucken Zählen Verschlüsseln Rechnen Schreiben Telefonieren
HNF ZEIT- FENSTER Glanzstücke der Technikgeschichte Vorwort 3 5 6 8 10 12 14 16 18 20 22 24 26 Inhalt Vorwort Dr. Richard Böger Vorwort Norbert Ryska Drucken Zählen Verschlüsseln Rechnen Schreiben Telefonieren
Herausforderungen und Chancen für KMU durch Industrie 4.0
 Herausforderungen und Chancen für KMU durch Industrie 4.0 Stadt- und Regionalmarketing City-Management Stadtentwicklung Einzelhandel Wirtschaftsförderung Immobilienentwicklung Personalberatung Tourismus
Herausforderungen und Chancen für KMU durch Industrie 4.0 Stadt- und Regionalmarketing City-Management Stadtentwicklung Einzelhandel Wirtschaftsförderung Immobilienentwicklung Personalberatung Tourismus
Mobile Robotik in der Produktion 4.0
 Automatisierungstage 2014 Mobile Robotik in der Produktion 4.0 Agenda Festo facts Anforderungen an die Mobile Robotik Lösungen für die Forschung und Bildung Aktuelle Forschungs- und Entwicklungsprojekte
Automatisierungstage 2014 Mobile Robotik in der Produktion 4.0 Agenda Festo facts Anforderungen an die Mobile Robotik Lösungen für die Forschung und Bildung Aktuelle Forschungs- und Entwicklungsprojekte
Another Small and Unique Robot from Oberpfaffenhofen
 Another Small and Unique Robot from Oberpfaffenhofen Einleitung Schülerinnen und Schüler der Mittel- und Oberstufe hauchen begeistert dem kleinen Roboter ASURO Leben ein! Abb. 1: Der Asuro ein Roboter
Another Small and Unique Robot from Oberpfaffenhofen Einleitung Schülerinnen und Schüler der Mittel- und Oberstufe hauchen begeistert dem kleinen Roboter ASURO Leben ein! Abb. 1: Der Asuro ein Roboter
an der Fachhochschule Köln
 an der Fachhochschule Köln Wie konnte Leonardo da Vinci eine Brücke ohne Nagel und Leim konstruieren? Funktioniert die Zaubererbank Gringotts wie eine ganz normale Bank? Woher kommt die»alkoholfahne«?
an der Fachhochschule Köln Wie konnte Leonardo da Vinci eine Brücke ohne Nagel und Leim konstruieren? Funktioniert die Zaubererbank Gringotts wie eine ganz normale Bank? Woher kommt die»alkoholfahne«?
Autonome Roboter. Übersicht. Fakultät Informatik Masterstudiengang Informatik
 Autonome Roboter SS 2015 Fakultät Informatik Masterstudiengang Informatik Prof. Dr. Oliver Bittel bittel@htwg-konstanz.de www-home.htwg-konstanz.de/~bittel Prof. Dr. O. Bittel, HTWG Konstanz Autonome Roboter
Autonome Roboter SS 2015 Fakultät Informatik Masterstudiengang Informatik Prof. Dr. Oliver Bittel bittel@htwg-konstanz.de www-home.htwg-konstanz.de/~bittel Prof. Dr. O. Bittel, HTWG Konstanz Autonome Roboter
Android-Geräte Programmieren 4. Hinweise zur Android-Programmierung. Stefan Rothe
 Android-Geräte Programmieren 4. Hinweise zur Android-Programmierung Stefan Rothe 2014 01 29 Rechtliche Hinweise Dieses Werk von Thomas Jampen und Stefan Rothe steht unter einer Creative Commons Attribution-Non-
Android-Geräte Programmieren 4. Hinweise zur Android-Programmierung Stefan Rothe 2014 01 29 Rechtliche Hinweise Dieses Werk von Thomas Jampen und Stefan Rothe steht unter einer Creative Commons Attribution-Non-
Lasertechnik I Dr. Kracht / Klaus Raebsch. -Handhabungssysteme-
 Lasertechnik I Dr. Kracht / Klaus Raebsch -Handhabungssysteme- 12/2009 1 Schematische Darstellung des Aufbaus einer Laseranlage nach DIN 2 Lasergerät Laserstrahlquelle Kühlgerät Gasversorgung Komponenten
Lasertechnik I Dr. Kracht / Klaus Raebsch -Handhabungssysteme- 12/2009 1 Schematische Darstellung des Aufbaus einer Laseranlage nach DIN 2 Lasergerät Laserstrahlquelle Kühlgerät Gasversorgung Komponenten
Robotik Mein Roboter erledigt das für mich
 myresearch Robotik Mein Roboter erledigt das für mich Wien 2008-10-23 Dipl. Ing.(FH) Christof Hieger Hieger C., Technikum Wien - Institut Mechatronics Persönliche Daten Dipl.Ing.(FH) Christof Hieger Institut
myresearch Robotik Mein Roboter erledigt das für mich Wien 2008-10-23 Dipl. Ing.(FH) Christof Hieger Hieger C., Technikum Wien - Institut Mechatronics Persönliche Daten Dipl.Ing.(FH) Christof Hieger Institut
Kapitel 3 Einführung in die CNC-Technik
 Standardisierung muss sein Kapitel 3 Einführung in die CNC-Technik 27 3 Einführung in die CNC-Technik 3.1 Entwicklungsgeschichte Im 18. Jahrhundert begann die Entwicklung von numerisch gesteuerten Maschinen.
Standardisierung muss sein Kapitel 3 Einführung in die CNC-Technik 27 3 Einführung in die CNC-Technik 3.1 Entwicklungsgeschichte Im 18. Jahrhundert begann die Entwicklung von numerisch gesteuerten Maschinen.
Bett im Berlingo eine Idee zum Nachbauen
 Bett im Berlingo eine Idee zum Nachbauen von Dr. Oliver Dürhammer So richtig Werbung für ein Auto wollte ich eigentlich nie machen. Aber seit dem ich meinen Berlingo habe, bin ich wirklich überzeugt von
Bett im Berlingo eine Idee zum Nachbauen von Dr. Oliver Dürhammer So richtig Werbung für ein Auto wollte ich eigentlich nie machen. Aber seit dem ich meinen Berlingo habe, bin ich wirklich überzeugt von
Profil und Angebot der Wirtschaftsinformatik an der Universität Bamberg
 Profil und Angebot der Wirtschaftsinformatik an der Universität Bamberg 5. Oktober 2004 FIT-Workshop Firmengruppe C. Kreul, Hallerndorf Dr. Klaus Schmitz, klaus.schmitz@ce-bis.de Centrum für betriebliche
Profil und Angebot der Wirtschaftsinformatik an der Universität Bamberg 5. Oktober 2004 FIT-Workshop Firmengruppe C. Kreul, Hallerndorf Dr. Klaus Schmitz, klaus.schmitz@ce-bis.de Centrum für betriebliche
Entwicklungen des Managements bei deutschen Automobilherstellern, -zulieferern und Autohändlern
 CALL FOR PAPERS 7. Wissenschaftsforum Mobilität National and International Trends in Mobility 18. Juni 2015 im InHaus II an der Universität Duisburg-Essen, Campus Duisburg Seit 2008 findet jährlich das
CALL FOR PAPERS 7. Wissenschaftsforum Mobilität National and International Trends in Mobility 18. Juni 2015 im InHaus II an der Universität Duisburg-Essen, Campus Duisburg Seit 2008 findet jährlich das