Quadrotor Control System
|
|
|
- Holger Schmid
- vor 5 Jahren
- Abrufe
Transkript



1 Quadrotor Control System Ein Lehr- und Lernsystem für die Quadrokopter-Programmierung Optimiert für Hochschulen und Universitäten


2 Der technische Fortschritt, vom Computer und Smartphone, über eingebettete Systeme wie automatische Türen und programmierbare Waschmaschinen bis hin zu Industrierobotern und Inspektionsdrohnen, bringt uns täglich viele Annehmlichkeiten und Vorteile. Diese Entwicklung ist aus unserer heutigen Welt kaum mehr wegzudenken. Dabei befinden wir uns erst am Anfang. Aktuell wird an Haushalts-Robotern, autonomen Autos und Paket-Drohnen geforscht und entwickelt. Die Bedeutung der zugrunde liegenden Technologien, deren Kern durch die Fächer Technische Informatik, Robotik, Mechatronik und Regelungstechnik behandelt wird, nimmt stetig zu. Dabei wächst nicht allein die Bedeutung der Technik an sich, sondern immer neue, zusätzliche und mächtigere Systeme machen die Technik zunehmend komplexer. Zwangsläufig wächst damit die Notwendigkeit, dies alles zu verstehen, zu beherrschen, nutzen, aber auch lehren und unterrichten zu können. Ein Beitrag dazu leistet das Quadrotor Control System (QCS), ein Lehr- und Lernsystem für Universitäten und Hochschulen. Die Programmierung von Quadrokoptern bzw. Flugrobotern (Drohnen) ist dabei nur ein ausgezeichnetes Anwendungsbeispiel, das Studentinnen und Studenten motiviert und Ihnen so hilft, mit Spaß an der Sache und auf eine spielerische Art und Weise, wichtige Grundlagen anwendungsnah zu begreifen und zu beherrschen. Das QCS ist dazu Einstiegshilfe als auch Grundstein für weiterführende Arbeiten im Bereich Flugrobotertechnik. 2

3 Das Quadrotor Control System wurde speziell für die Lehre und Forschung im Bereich der Flugrobotertechnik entwickelt und auf die Anforderungen in Unterricht und Forschung abgestimmt. Es vermittelt Grundlagen aus den Fächern Technische Informatik, Robotik, Mechatronik und Regelungstechnik. Es ist Teil des QCS-Lehrkonzepts, das die folgenden Themenfelder umfasst: Eingebettete Programmierung Sensorik Signalverarbeitung Echtzeitsysteme Regelungstechnik Steuerung Verteilte Systeme Kommunikation: Telemetrie & Telekommandierung Automatisierung Schritt für Schritt lernen und entwickeln die Studierenden ihre eigene Quadrokopter- Flugsteuerung, die als Grundstein für die weitere Entwicklung im vielseitigen Gebiet der Flugrobotertechnik dient Ideal als Framework für Studienarbeiten! Als Dozent erhalten Sie von uns einen Einführungskurs, die dazugehörige Theorie sowie Lösungen und können so die Studierenden optimal begleiten. In einem Satz: Viel Spaß und Erfolg beim Lernen und Forschen! Das Lehr- und Lernsystem auf einem Blick In direktem Umfeld der Lehre entwickelt, ist das QCS eine vielseitige praxisnahe Lehr- und Lernplattform für den Einsatz im Bildungsbereich. Absturzsichere Entwicklung Mit den DOF Aufhängungen des QCS wird das System am Arbeitsplatz gehalten, ohne die Dynamik des Systems zu verfälschen. Schritt für Schritt zur Lösung Optimale didaktische Herangehensweise durch Rekonfigurierbarkeit des Systems für die nächsten Arbeitsschritte und Aufgabenstellungen. Start in die Forschung Offene Schnittstellen zur Integration eigener Hardware und Softwaremodule nach eigenen Ideen und Vorstellungen. 3

 Lerninhalte (Folien mit Theorie, Hinweisen")
 Das gesamte")


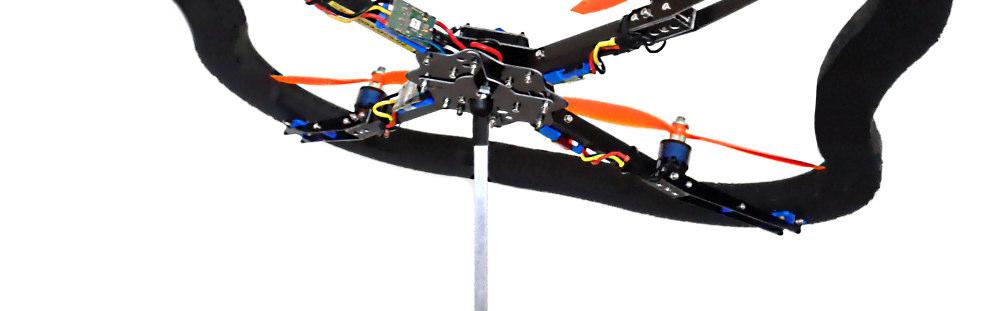
4 Das System Mit dem QCS-Komplettpacket erhalten Sie in einem Paket ALLES, was Sie für einen erfolgreichen Start benötigen! Hardware (QCS-Quadrokopter mit DOF-Prinzip * und Schutzring für eine sichere Verwendung) Software (Framework enthält Vorlagen für Studierende und Musterlösungen für Dozenten) Lerninhalte (Folien mit Theorie, Hinweisen und Aufgaben) Dokumentation Zubuchbare Einführungskurse für Dozenten ** Hinzufügbare Add-Ons ** (Große Auswahl an Modulbausteinen wie Sensoren, Prozessoren und Aktuatoren für nahezu alles Erdenkliche) Das gesamte Komplettpaket gibt es für NUR 1485 ***. Beim Kauf von mehreren Systemen gibt es das vierte und sechste System zum halben Preis! Aktuatorik 360 Sicherheitsschutzring 4 Brushless Motoren, 4 Brushless Controller und 2 x 4 Propeller Programmierbarer Quadrokopter Mit 32bit Mikrokontroller, MPU6000 mit Gyroskop und Accelerometer sowie I2C, USART und PWM Kommunikationsschnittstellen * Das DOF-Prinzip wird auf der folgenden Seite erläutert. **Add-Ons und Einführungskurse nicht im Preis inbegriffen. *** zzgl. 19% Mehrwertsteuer, gültig bis
5 Netzteil Genug Strom für alle Motoren! DOF - Aufhängungen Mit 2-DOF und 3-DOF Gelenken, Rändelschrauben und Stativ zur einfachen und stabilen Befestigung am Arbeitsplatz. Verkabelung Für I2C Kommunikation und Spannungsversorgung. EVK1100 Development Board Entwicklungsplattform für die Implementierung der QCS Steuerung am Arbeitsplatz. 5
6 Das DOF-Prinzip Die Programmierung und Entwicklung einer Quadrokopter-Flugsteuerung ist aufgrund der 6 Freiheitsgrade (engl. DOF = Degree of Freedom) des freien Flugs eine komplexe Angelegenheit. Doch dank der DOF-Aufhängungen müssen Sie sich bei der Entwicklung keine Gedanken über die Absturzgefahren des Quadrokopters machen! Die speziell für die Quadrokopterprogrammierung entwickelten DOF-Aufhängungen dienen dazu, mechanisch einzelne Freiheitsgrade zu und abzuschalten, wodurch die einzelnen Regler für die verschiedenen Bewegungsachsen des Systems unabhängig voneinander betrachtet, implementiert und parametrisiert werden können. Eine weitere Besonderheit: Das System ist am Arbeitsplatz über die DOF-Gelenke fixiert, sodass das QCS sicher und einfach programmiert werden kann. Das Umstecken der Gelenke zur Konfiguration der Freiheitsgrade ist durch ein einfaches und schnelles Stecksystem realisiert, sodass keine Umbaupausen die Entwicklung behindern! In wenigen Sekunden kann der QCS neben dem Schreibtisch fixiert und so kontrolliert betrieben werden oder sobald gewünscht - als QCS-F frei geflogen werden. Am Ende der Entwicklung haben Sie Ihre eigene Flugsteuerung für den QCS- Quadrokopter implementiert, die bereit ist abzuheben! Tauschen Sie einfach die DOF-Aufhängung gegen den, in der QCS-F Erweiterung enthaltenen, Akkuhalter aus, schalten Sie die Fernsteuerung an und heben Sie ab! Auch über die anfängliche Entwicklung der Flugsteuerung hinaus können Sie mit Hilfe des DOF-Prinzips Ihre selbst entwickelte Software nach kritischen Änderung zunächst auf Herz und Nieren testen, bevor Sie fliegen gehen. Damit vermeiden Sie Abstürze, Reparaturen und Kosten! 6
7 Ein Quadrokopter lässt sich über alle 3 Achsen des dreidimensionalen Raumes rotieren, sodass insgesamt 3 Regler für eine stabile Lageregelung des Kopters im Flug benötigt werden. Für die gesamte Programmierung der QCS-Flugsteuerung werden lediglich zwei DOF-Aufhängungen benötigt, mit denen Sie alle Regler unabhängig voneinander programmieren und konfigurieren können. Die 1-2 DOF - Aufhängung Mit dieser Aufhängung steigen Sie in die Programmierung der Quadrokopter- Flugsteuerung ein. Zunächst beginnen Sie, den Quadrokopter über die Roll-Achse zu stabilisieren. Dazu wird die Aufhängung in der Gier-Achse arretiert, sodass nur noch Rotationen des QCS um die Roll-Achse möglich sind. Durch die Fixierung können Sie entspannt die richtigen Reglerparameter finden. Wenn die Regelung um die Roll-Achse stabilisiert ist, kann mit der Regelung der Gier-Achse begonnen werden, wozu die Roll-Achse arretiert werden kann. Schließlich kann das überlagerte Reglerverhalten ohne Arretierungen von Roll- und Gier-Achse behandelt werden. Die 3 DOF - Aufhängung Wenn das QCS stabil um die Roll- und Gier-Achse regelt, kann mit wenigen Handgriffen die Aufhängung ausgetauscht werden, um alle 3 Achsen gleichzeitig zu betrachten. Die 3-DOF-Aufhängung ist so konzipiert, dass sie von seinen Systemeigenschaften dem freien Flug entspricht. Ein Regler, der die 3-DOF-Aufhängung stabil bewältigt, kann auch fliegen. Dadurch ist ein gut regelnder Quadrokopter auf der 3-DOF-Aufhängung bereit für den Flug! Mit wenigen Griffen kann das System mit dem QCS-Akkuhalter ausgestattet und für den freien Flug vorbereitet werden. Und fertig ist der selbst programmierte Quadrokopter! 7



 Das QCS-Lehrkonzept setzt grundlegende Kenntnisse der Programmierung in C voraus. Hier genügt ein einsemestriger Vorbereitungskurs als Grundlage.")

8 Das QCS Lehrkonzept An Universitäten und Hochschulen über 7 Jahre erprobt, findet das QCS große Anerkennung in Lehre und Forschung. Um das System gezielt und effizient nutzen zu können, wurde das QCS-Lehrkonzept entwickelt. In aktuell 12 Lernabschnitten werden die Inhalte der Quadrokopter-Programmierung behandelt. Die Lernabschnitte werden ständig verbessert und erweitert. Falls Ihnen etwas fehlt oder Sie Verbesserungsvorschläge haben, sprechen Sie uns gerne darauf an! Dank des direkten Bezugs zur Praxis und eines hoch aktuellen sowie spielerischen Themas sind die Studierenden mit hoher Motivation in die Programmierung ihrer eigenen Flugsteuerung vertieft. Zu jedem Abschnitt bekommen Sie Aufgabenstellungen, Hilfestellungen, Theorie sowie Software (Vorlagen für Studenten, Lösungen für Dozenten) an die Hand. Für Dozenten bieten wir außerdem einen Einführungskurs an, bei dem an die Hardware, Software und Lerninhalte herangeführt wird. Voraussetzungen Die Zielgruppe Das QCS-Lehrkonzept beinhaltet Inhalte zu den Themen: Eingebettete Programmierung Sensorik Signalverarbeitung Echtzeitsysteme Regelungstechnik Steuerung Verteilte Systeme Kommunikation (Telemetrie, Telekommandierung) Das QCS-Lehrkonzept setzt grundlegende Kenntnisse der Programmierung in C voraus. Hier genügt ein einsemestriger Vorbereitungskurs als Grundlage. Für die Erarbeitung der Aufgaben hat sich das Zusammenwirken in 2er-Gruppen bewährt, wodurch zusätzlich Teamfähigkeit und Softskills gestärkt werden. Daher ist das Quadrotor Control System nicht nur an Drohnentechniker adressiert, sondern darüber hinaus an alle, die mit den obigen Themen befasst sind, also auch angehende oder gelernte Ingenieure, Mechatroniker und Informatiker. Ablauf und Zeitrahmen Der zeitliche Aufwand pro Lernabschnitt beträgt ca 2-4 Zeitstunden in der Präsenzübung zuzüglich Selbststudium. Die Programmierung von Quadrokoptern ist ein durchweg praktisches Themenfeld, bei dem die direkte Arbeit mit Hardware und Software entscheidend für die erfolgreiche Entwicklung ist. Dabei dient das Quadrotor Control System als Entwicklungsplattform, an der die einzelnen Übungen implementiert und erarbeitet werden können. Die Bearbeitung der Abschnitte und der zugehörigen Aufgaben wird in einem wöchentlichen Turnus empfohlen, sodass sich ein Zeitrahmen von 12 Wochen ergibt. 8

9 Methoden, Ansätze und Materialien für Dozenten Als Dozent erhalten Sie mit dem QCS alles, was Sie für die effektive Lehre im Bereich der Flugrobotertechnik benötigen. Dazu gehören: Lerninhalte als Übungsfolien für 12 Lernabschnitte inkl. Theorie und Aufgabenstellungen Framework-Vorlage (Software) für Studierende zum Einstieg Fertige Lösungen (Software) zu jedem Lernabschnitt Ausführliche Dokumentation zu Soft- und Hardware Zum Einstieg in die Thematik der Flugrobotertechnik bieten wir in Würzburg, vor Ort oder via Skype einen kompakten Einführungskurs für Dozenten an, bei dem wir alle Materialien (Hardware, Software, Lerninhalte) vorstellen und Fragen beantworten. Exemplarische Modulbeschreibung der Lehrveranstaltung: Modulbezeichnung Dauer Quadrokopter Programmierung 12 Wochen Häufigkeit des Angebotes Jährlich einmal Lehrsprache Voraussetzungen ECTS-Credits 5 Gesamtworkload und Zusammensetzung Lehrform Prüfungsleistungen Lernergebnisse Inhalte Deutsch / Englisch Grundkenntnisse in C-Programmierung 150 h (30 Präsenz, 120 Selbststudium) Wöchentlich 2h Präsenzübungen mit selbständiger Vor- und Nachbereitung Testat Die Teilnehmerinnen und Teilnehmer werden befähigt, eine Flugsteuerung für einen Quadrokopter zu implementieren. (Sensorik, Datenverarbeitung, Filterung, Regelung) Kommunikation: USART, Telemetrie und Telekommandierung Sensorik und Signalverarbeitung (Kalmanfilter, Komplementärfilter, Quaternionen) Quadrokopterregelung (Lage, Gier, 3DOF) Automatisierung von Steuerbefehlen Lehr- und Lernmethoden Vermittlung der theoretischen und technischen Grundlagen in Frontalunterricht und Demonstrationen, Problemorientierte Aufgabenstellungen zur selbständigen Erarbeitung am Quadrotor Control System und PC Literatur Faszination Quadrokopter, Büchi, 2010 Drohnen: seit 1990, Laumanns, 2012 Regelungstechnik 1, Lunze, 2014 An introduction to 9 the Kalman Filter, Welch & Bishop, 2006 Autonome Quadrokopter zur Innenraumerkundung, Gageik, 2015





10 Die Lerninhalte Für die Lageregelung eines Quadrokopters müssen mehrere Regler implementiert werden. In zwei Abschnitten wird die Funktionsweise eines PID-Reglers erläutert und die unabhängige Regelung der Roll-, Pitch- und Yaw Achsen eines Quadrokopters behandelt Mit dem QCS können Sie die komplette Programmierung vom ersten Auslesen der Sensoren, über die Datenfilterung und -aufbereitung bis hin zur Regelung und Automatisierung durchlaufen, lehren und lernen. Dafür haben wir vollständige Lerninhalte erarbeitet, die wir Ihnen anhand von Präsentationsmaterial mitgeben: 12. Die Automatisierung von Prozessen als wohl der wichtigste Anwendungsfall der Robotik wird in der letzten Übung behandelt. Das Kalman Filter ist das weitverbreiteste Verfahren zur Datenfusion. Es kommt in Robotern, Autos, Flugzeugen und Raumschiffen zum Einsatz. In dieser Übung wird ein Kalman Filter für das QCS an einem einfachen Beispiel erklärt, diskutiert und implementiert Telekommandos werden genutzt, um Befehle zu übermitteln. Diese Übung beschäftigt sich mit der Gegenseite der Telemetrie bzw. Steuerung des QCS Die Telemetrie ist die Übertragung von Systeminformationen an die Bodenstation. Dazu werden eine grafische 7. Bodenstationssoftware sowie ein Kommunikationsprotokoll behandelt. Die Steuerung des QCS erfolgt über einen AVR 32bit Microcontroller, der in C programmiert wird. In einem eigenen Abschnitt wird der Einstieg in das AVR Entwicklungs-Framework und das Ansteuern eines Displays behandelt.




11 Schließlich sind die unterschiedlichen Regler zu superpositionieren, um eine gemeinsame und gleichzeitige Reglung aller 3 Achsen des Raumes zu gewährleisten. In diesem Abschnitt wird auf Effekte und Randbedingungen der Superpositon und Mehrgrößenregelung eingegangen. 11. Für die Regelung des QCS ist eine IMU, eine so genannte inertiale Messeinheit, notwendig, mit deren Hilfe die aktuelle Orientierung in 3D bestimmt werden kann. In diesem Abschnitt werden die Grundlagen, die Ansteuerung und das Auslesen der IMU behandelt Um eine driftfreie Orientierungsbestimmung zu gewährleisten, sind zwei Sensoren, ein Accelerometer und ein Gyroskop, erforderlich. Beide Sensoren haben Ihre intrinsischen Schwächen, aber mittels komplementärer Datenfusion lassen sich diese überwinden. Das in dieser Übung behandelte Complementary Filter ist ein einfaches, aber effektives Filter, um dies zu erreichen. USART / UART Kommunikation und Debugging Die Kommunikation und das Debugging sind wichtige Hilfsmittel bei der Programmierung eingebetter Systeme. Die sämtliche Datenübertragung zwischen QCS und Bodenstation können Sie nach Ihren Vorstellungen gestalten, wozu dieser Abschnitt eine Einführung 11 liefert. 4. Die korrekte Verarbeitung der inertialen Sensordaten zur Orientierungsbestimmung ist entscheidend für die spätere Verwendung zur Lageregelung. Quaternionen sind dazu heute das Mittel der Wahl. Die Übung gibt überdies eine wertvolle Einführung in das Zahlensystem der Quaternionen und ihre praktische Verwendungsmöglichkeiten.
12 Weiterführende Entwicklung mit dem QCS-F Das Ergebnis der Arbeit mit dem QCS ist eine flugreife Flugsteuerung, die mit der Flugerweiterung, dem QCS - Flying (QCS-F), bei weitergehenden Arbeiten im Bereich Forschung und Entwicklung eingesetzt werden kann. Auf der Basis des offenen QCS - Softwareframeworks, welches vielerlei Schnittstellen für die Integration weiterer Module bietet, können individuelle Ansätze für aktuelle Forschungsthemen aus dem Bereich der Flugrobotertechnik behandelt werden. Zusammen mit dem QCS erhalten Sie eine ausführliche Dokumentation. Darüber hinaus bieten wir Ihnen eine breite, ständig aktualisierte und wachsende Palette an Add - Ons, um einen schnellen Einstieg in eine Vielzahl an tiefergehenden Forschungsgebieten zu Themen wie z.b. Autonomie, Schwarmverhalten, SAR (Search - And - Rescue) zu ermöglichen. Höhensensorik Die automatische Kontrolle der Flughöhe ist ein Grundstein für die Entwicklung intelligenter Drohnen. Mit diesem Add-On erhalten Sie ein Modul bestehend aus Ultraschall-, Infrarot- und Luftdrucksensoren, die kontinuierlich die Flughöhe messen. Optischer Fluss Mit der Sensorik zur Erfassung des optischen Flusses ist das System in der Lage, seine laterale Bewegung bezüglich des Grundes zu bestimmen und zu regeln. Dadurch wird eine sehr genaue Positionsregelung und Flugstabilisierung ermöglicht. GPS-Modul Das globale Positionierungssystem ist das optimale Hilfsmittel für die Positionskontrolle der Drohne. Steuern Sie das QCS-F über GPS- Wegpunkte und lassen Sie Missionen selbständig abfliegen, ohne manuell eingreifen zu müssen! 12
13 Objekterkennung Für die eigenständige Missionsplanung ist eine möglichst umfassende Kenntnis der Umgebung entscheidend. Mit High-End CPU und On-Board Kamera kann eine automatische Objekterkennung und Situationsbeurteilung für die Drohne implementiert werden. Stereo Vision Eine Form der Umgebungserfassung ist die Methode der Stereo Vision. Nach dem Prinzip des menschlichen Sehens, kann die Drohne, mit High-End CPU und Stereokameras ausgestattet, ein räumliches Abbild der Umgebung errechnen. Hinderniserkennung Eine zuverlässige Hinderniserkennung ist essenziell für die Durchführung von autonomen Missionen z.b. in Gebäuden, Tunneln, etc. Mit dem Hinderniserkennungsmodul können Objekte in der Umgebung der Drohne erfasst und davon abgeleitet Maßnahmen zur Kollisionsvermeidung unternommen werden. 13

14 Erfahrungen mit dem QCS Das Quadrotor Control System wird seit 7 Jahren an Universitäten und Hochschulen eingesetzt. Das Lehrsystem erweist sich von Beginn an fortwährend großer Beliebtheit unter Studierenden und Dozenten. Prof. Dr. Fischer von der Technischen Hochschule Brandenburg erklärt das Quadrotor Control System dem Brandenburgischen Ministerpräsidenten Dietmar Woidke anlässlich des Besuchs des Ministerpräsidenten auf der CeBIT 2016 in Hannover: Ich habe noch nie erlebt, dass Studierende so lange und hoch motiviert an ihrem Arbeitsplatz sitzen, um Lösungen zu entwickeln! Ministerpräsident des Landes Brandenburg Dietmar Woidke am CeBIT-Stand der TH Brandenburg. Prof. Dr. Sergio Montenegro mit seinen Studierenden an der Universität Würzburg, an der das Quadrotor Control System im Studiengang Luft- und Raumfahrtinformatik seit über 6 Jahren erfolgreich in der Lehre eingesetzt wird: Einfach super! Prof. Montenegro (l.) an der Universität Würzburg ist vom Quadrotor Control System begeistert. 14



15 Studierende der Summerschool Aerospace Information Technology 2015 an der Universität Würzburg: I am in my 1st year master studies and this was the best exercise I ever had! Quadrotor exercises VERY COOL! I really liked the Quadrotor Lab and enjoyed to work with the system! Die Wirkung des Einsatzes des QCS Lehrkonzepts auf Lernende wurde im Vergleich zu anderen Lehrveranstaltungen erfasst. Hier einige Ergebnisse (veröffentlicht auf der SPIE Conference in San Francisco 2015): 15
 931 31 83510 Email: info@emqopter.de www.emqopter.de 16")
16 Das Projekt Embedded Qopter wird im Rahmen des EXIST Programms durch das Bundesministerium für Wirtschaft und Energie und den Europäischen Sozialfonds gefördert. Emqopter GmbH Josef-Martin-Weg Würzburg Tel.: +49 (0)
Vielseitig, Intelligent, Sicher
 Flugrobotertechnik Vielseitig, Intelligent, Sicher Maßgeschneidert für Industrie, Gewerbe, Lehre und Forschung www.emqopter.de Inhalte Emqopter ist Ihr Partner zur Freisetzung ruhender Potentiale mittels
Flugrobotertechnik Vielseitig, Intelligent, Sicher Maßgeschneidert für Industrie, Gewerbe, Lehre und Forschung www.emqopter.de Inhalte Emqopter ist Ihr Partner zur Freisetzung ruhender Potentiale mittels
verteilte Systeme (Anwendung Quadrocopter) an.
 an.") verteilte Systeme 15.05.2012 Quadrocopter für Aufgaben im Indoor-Bereich (Luftfahrtinformatik). Die Systeme sollen in die Lage versetzt werden selbstständig (autonom) zu agieren (z.b. Suchen durchführen)
verteilte Systeme 15.05.2012 Quadrocopter für Aufgaben im Indoor-Bereich (Luftfahrtinformatik). Die Systeme sollen in die Lage versetzt werden selbstständig (autonom) zu agieren (z.b. Suchen durchführen)
Automatisierung. Steuerung und Automatisierung
 Automatisierung Steuerung und Automatisierung Umfang: ca. 1-3 Zeitstunden Steuerung eines Quadrokopters Sicherheitseinweisung Aufgaben & Hinweise Fußzeilentext 2 Steuerung eines Quadrokopters: Basierend
Automatisierung Steuerung und Automatisierung Umfang: ca. 1-3 Zeitstunden Steuerung eines Quadrokopters Sicherheitseinweisung Aufgaben & Hinweise Fußzeilentext 2 Steuerung eines Quadrokopters: Basierend
Sensorik (IMU) Inertial Measurement Unit MPU6050
 Inertial Measurement Unit MPU6050") Sensorik (IMU) Inertial Measurement Unit MPU6050 Umfang: ca. 1-3 Zeitstunden Einführung Quadrokopter-Labor IMU (Intertial Measurement Unit) TWI (Two Wire Interface) EMQ Framework Aufgaben Emqopter GmbH
Sensorik (IMU) Inertial Measurement Unit MPU6050 Umfang: ca. 1-3 Zeitstunden Einführung Quadrokopter-Labor IMU (Intertial Measurement Unit) TWI (Two Wire Interface) EMQ Framework Aufgaben Emqopter GmbH
Lehrangebot IuK-Projekt ab Sommersemester 2018
 Lehrangebot IuK-Projekt ab Sommersemester 2018 Bachelorstudiengang Informations- und Kommunikationstechnik Prof. Jörg Thiem http://www.fh-dortmund.de/thiem mailto:joerg.thiem@fh-dortmund.de Organisatorisches
Lehrangebot IuK-Projekt ab Sommersemester 2018 Bachelorstudiengang Informations- und Kommunikationstechnik Prof. Jörg Thiem http://www.fh-dortmund.de/thiem mailto:joerg.thiem@fh-dortmund.de Organisatorisches
Kommunikation. Telekommandos
 Kommunikation Telekommandos Umfang: ca. 2-4 Zeitstunden Telekommandos senden Telekommandos empfangen Bearbeitung der Benutzeroberfläche Aufgaben 2 Telemetrie Telekommandos Pilot / Bodenstation Quadrokopter
Kommunikation Telekommandos Umfang: ca. 2-4 Zeitstunden Telekommandos senden Telekommandos empfangen Bearbeitung der Benutzeroberfläche Aufgaben 2 Telemetrie Telekommandos Pilot / Bodenstation Quadrokopter
Lageregelung. Aktuatorik und Lageregelung
 Lageregelung Aktuatorik und Lageregelung Umfang: ca. 2-4 Zeitstunden Lageregelung Bürstenlose Motoren Motorregler EMQ Framework Sicherheitseinweisung Theorie zur Regelung Aufgaben & Hinweise Emqopter GmbH
Lageregelung Aktuatorik und Lageregelung Umfang: ca. 2-4 Zeitstunden Lageregelung Bürstenlose Motoren Motorregler EMQ Framework Sicherheitseinweisung Theorie zur Regelung Aufgaben & Hinweise Emqopter GmbH
Angewandte Informatik. Bachelorstudiengang.
 Angewandte Informatik Bachelorstudiengang www.hs-weingarten.de Digitalisierung mitgestalten Computer und Software sind aus unserem Alltag nicht mehr wegzudenken. Sie stecken in der Autoelektronik und im
Angewandte Informatik Bachelorstudiengang www.hs-weingarten.de Digitalisierung mitgestalten Computer und Software sind aus unserem Alltag nicht mehr wegzudenken. Sie stecken in der Autoelektronik und im
Wegweisende Roboter für zukunftsweisende Forschung. Wir stellen vor: KINOVA Gen3 Ultraleicht Roboter. kinovarobotics.com 1
 Wegweisende Roboter für zukunftsweisende Forschung Wir stellen vor: Gen3 Ultraleicht Roboter kinovarobotics.com 1 Eine Welt der Möglichkeiten in der Forschung eröffnen Bei verantwortungsvoller Robotertechnik
Wegweisende Roboter für zukunftsweisende Forschung Wir stellen vor: Gen3 Ultraleicht Roboter kinovarobotics.com 1 Eine Welt der Möglichkeiten in der Forschung eröffnen Bei verantwortungsvoller Robotertechnik
Bild Tom Kawara Copyright kawara.com und ethz.ch
 Bild Tom Kawara 31.5.2011. Copyright kawara.com und ethz.ch Rahmen Im fünften sowie sechsten Semester des Bachelorstudiums in Maschinenbau haben die Studenten die Möglichkeit, anstelle des herkömmlichen
Bild Tom Kawara 31.5.2011. Copyright kawara.com und ethz.ch Rahmen Im fünften sowie sechsten Semester des Bachelorstudiums in Maschinenbau haben die Studenten die Möglichkeit, anstelle des herkömmlichen
School of Engineering Institut für Mechatronische Systeme (IMS)
") School of Engineering Institut für Mechatronische Systeme (IMS) Zürcher Fachhochschule www.ims.zhaw.ch Forschung & Entwicklung Institut für Mechatronische Systeme (IMS) Mechatronik bringt die Disziplinen
School of Engineering Institut für Mechatronische Systeme (IMS) Zürcher Fachhochschule www.ims.zhaw.ch Forschung & Entwicklung Institut für Mechatronische Systeme (IMS) Mechatronik bringt die Disziplinen
Entwicklung einer Anwendung für die Microsoft HoloLens
 Entwicklung einer Anwendung für die Microsoft HoloLens Lehrstuhl für Eingebettete Systeme der Informationstechnik (ESIT) Entwicklung einer Anwendung für die Microsoft HoloLens Betreuer: Florian Fricke
Entwicklung einer Anwendung für die Microsoft HoloLens Lehrstuhl für Eingebettete Systeme der Informationstechnik (ESIT) Entwicklung einer Anwendung für die Microsoft HoloLens Betreuer: Florian Fricke
Modul- und Lehrveranstaltungsbeschreibung 6. Semester Seite
 Modul- und Lehrveranstaltungsbeschreibung Seite Modulbezeichnung Zertifizierung und Planungsanforderungen CERT 2 Lehrveranstaltungsbezeichnung Zertifizierung und Planungsanforderungen CERT 3 Modulbezeichnung
Modul- und Lehrveranstaltungsbeschreibung Seite Modulbezeichnung Zertifizierung und Planungsanforderungen CERT 2 Lehrveranstaltungsbezeichnung Zertifizierung und Planungsanforderungen CERT 3 Modulbezeichnung
Signalverarbeitung. Quaternion
 Signalverarbeitung Quaternion Umfang: ca. 1-3 Zeitstunden Signalverarbeitung Quaternionen Vor- und Nachteile von Quaternionen Implementierung EMQ Framework Aufgaben 1-4 2 Allgemein (gekürzt): Die Signalverarbeitung
Signalverarbeitung Quaternion Umfang: ca. 1-3 Zeitstunden Signalverarbeitung Quaternionen Vor- und Nachteile von Quaternionen Implementierung EMQ Framework Aufgaben 1-4 2 Allgemein (gekürzt): Die Signalverarbeitung
4 Rollenänderung der Lehrenden und Lernenden
 4 Rollenänderung der Lehrenden und Lernenden Die Einführung einer neuen Technologie stellt auch immer neue Anforderungen an die daran partizipierenden Personen. Lernende, die bisher immer nur Face-to-Face-Unterricht
4 Rollenänderung der Lehrenden und Lernenden Die Einführung einer neuen Technologie stellt auch immer neue Anforderungen an die daran partizipierenden Personen. Lernende, die bisher immer nur Face-to-Face-Unterricht
LabVIEW Erfahrungen aus der
 Fraunhofer VolksBot mit CompactRIO und LabVIEW Erfahrungen aus der Lehrveranstaltungsreihe Teamrobotik Ansgar Bredenfeld, Fraunhofer IAIS Manuela Kanneberg, Timo Lindhorst, Edgar Nett, Otto-von-Guericke-Universität
Fraunhofer VolksBot mit CompactRIO und LabVIEW Erfahrungen aus der Lehrveranstaltungsreihe Teamrobotik Ansgar Bredenfeld, Fraunhofer IAIS Manuela Kanneberg, Timo Lindhorst, Edgar Nett, Otto-von-Guericke-Universität
QUADROKOPTER VERSTEHEN, BAUEN UND FLIEGEN. Quadrokopter-Theorie
 QUADROKOPTER VERSTEHEN, BAUEN UND FLIEGEN Quadrokopter-Theorie Martin Reiche, Februar 2018 Quadrokopter-Theorie wer kennt diese TLAs? DJI ESC FPV GPS IMU LiPo mah PWM UAV 2 Quadrokopter-Theorie wer kennt
QUADROKOPTER VERSTEHEN, BAUEN UND FLIEGEN Quadrokopter-Theorie Martin Reiche, Februar 2018 Quadrokopter-Theorie wer kennt diese TLAs? DJI ESC FPV GPS IMU LiPo mah PWM UAV 2 Quadrokopter-Theorie wer kennt
Evaluation der Lehre
 Wie viele Stunden pro Woche benötigen Sie durchschnittlich r Vor- und Nachbereitung dieses Moduls (incl. evtl. Hausaufgaben, Tutorien, Hausarbeiten, Präsentationen etc.)? 6 3 3 1 1 1 2 3 1 1 6 Mittelwert:
Wie viele Stunden pro Woche benötigen Sie durchschnittlich r Vor- und Nachbereitung dieses Moduls (incl. evtl. Hausaufgaben, Tutorien, Hausarbeiten, Präsentationen etc.)? 6 3 3 1 1 1 2 3 1 1 6 Mittelwert:
Fortbildungsmodule >> Elektrotechnik. Präzisierung zu Modulbereich Mikrocontroller [E61] Teilmodul E611 Grundlagen Mikrocontrollertechnik (µc)
![Fortbildungsmodule >> Elektrotechnik. Präzisierung zu Modulbereich Mikrocontroller [E61] Teilmodul E611 Grundlagen Mikrocontrollertechnik (µc)](/thumbs/55/36092411.jpg "Fortbildungsmodule >> Elektrotechnik. Präzisierung zu Modulbereich Mikrocontroller [E61] Teilmodul E611 Grundlagen Mikrocontrollertechnik (µc)") B A D E N - W Ü R T T E M B E R G R E G I E R U N G S P R Ä S I D I E N Freiburg // Karlsruhe // Stuttgart // Tübingen Abt. 7 Schule und Bildung Fortbildungsmodule >> Elektrotechnik Präzisierung zu Modulbereich
B A D E N - W Ü R T T E M B E R G R E G I E R U N G S P R Ä S I D I E N Freiburg // Karlsruhe // Stuttgart // Tübingen Abt. 7 Schule und Bildung Fortbildungsmodule >> Elektrotechnik Präzisierung zu Modulbereich
Modulkatalog Bachelor of Education (B.Ed.) Lehramt Gymnasium: Deutsch (PO 2015, Stand Dezember 2015)
 Lehramt Gymnasium: Deutsch (PO 2015, Stand Dezember 2015)") Modulkatalog Bachelor of Education (B.Ed.) Lehramt Gymnasium: Deutsch (PO 2015, Stand Dezember 2015) Modul Sprach- und Literaturwissenschaft 1 Studiengang: B.Ed. Lehramt Gymnasium: Deutsch Abschlussziel:
Modulkatalog Bachelor of Education (B.Ed.) Lehramt Gymnasium: Deutsch (PO 2015, Stand Dezember 2015) Modul Sprach- und Literaturwissenschaft 1 Studiengang: B.Ed. Lehramt Gymnasium: Deutsch Abschlussziel:
B.-Eng. Michael Uschold Urs Ittemann. OTH mind BMBF Verbundprojekt
 Robotik Programmierung und Handhabung Modulhandbuch 2017 B.-Eng. Michael Uschold Urs Ittemann OTH mind BMBF Verbundprojekt Titel Zusatzinformationen Lehrende / Dozierende Termine Zulassungsvoraussetzungen
Robotik Programmierung und Handhabung Modulhandbuch 2017 B.-Eng. Michael Uschold Urs Ittemann OTH mind BMBF Verbundprojekt Titel Zusatzinformationen Lehrende / Dozierende Termine Zulassungsvoraussetzungen
Modulübersicht. des Hochschulzertifikats Wirtschaftspsychologie. 05/2019 IST-Hochschule für Management GmbH
 Modulübersicht des Hochschulzertifikats Wirtschaftspsychologie 2 Die Inhalte und Ziele der Module werden durch eine sinnvolle Verknüpfung verschiedener Lehr- und Lernmethoden vermittelt: Studienhefte Den
Modulübersicht des Hochschulzertifikats Wirtschaftspsychologie 2 Die Inhalte und Ziele der Module werden durch eine sinnvolle Verknüpfung verschiedener Lehr- und Lernmethoden vermittelt: Studienhefte Den
Eine Semesterarbeit an der FH Wildau: Aufbau und Steuerung eines Quadrokopters
 Eine Semesterarbeit an der FH Wildau: Aufbau und Steuerung eines Quadrokopters Telematik Master 2008 / 3. Semester Konrad Bösche, Tony Goldmann, Luis Herrera, Dirk Nilius, Marek Penno, Stefan Quednau und
Eine Semesterarbeit an der FH Wildau: Aufbau und Steuerung eines Quadrokopters Telematik Master 2008 / 3. Semester Konrad Bösche, Tony Goldmann, Luis Herrera, Dirk Nilius, Marek Penno, Stefan Quednau und
Modell Semesterstruktur mit Freiräumen für Projekte
 4-1-4-1-4-1-Modell Semesterstruktur mit Freiräumen für Projekte Persönlichkeiten für den Arbeitsmarkt wissenschaftlich qualifizieren, Teil 2 Prof. Dr. Marco Winzker, Seit 2007 im Fachbereich Elektrotechnik,
4-1-4-1-4-1-Modell Semesterstruktur mit Freiräumen für Projekte Persönlichkeiten für den Arbeitsmarkt wissenschaftlich qualifizieren, Teil 2 Prof. Dr. Marco Winzker, Seit 2007 im Fachbereich Elektrotechnik,
Johannes Stier. ni.com
 1 Johannes Stier Technische Universität Dresden Studiendekan Mechatronik Prof. Dr.-Ing. Michael Beitelschmidt Lego Mindstorms EV3 hat Einzug in das Einführungsprojekt Mechatronik gefunden johannes.stier@tu-dresden.de
1 Johannes Stier Technische Universität Dresden Studiendekan Mechatronik Prof. Dr.-Ing. Michael Beitelschmidt Lego Mindstorms EV3 hat Einzug in das Einführungsprojekt Mechatronik gefunden johannes.stier@tu-dresden.de
Ergänzungsmodul. Modulnummer. Medien und Informatik. Modulverantwortlich
 Ergänzungsmodul Modulname XVI Medien und Informatik Inhalte: Die Veranstaltungen zu Mensch Computer Interaktion I führen in die grundlegenden Aspekte der Gestaltung von Benutzungsoberflächen ein. Ausgehend
Ergänzungsmodul Modulname XVI Medien und Informatik Inhalte: Die Veranstaltungen zu Mensch Computer Interaktion I führen in die grundlegenden Aspekte der Gestaltung von Benutzungsoberflächen ein. Ausgehend
Prof. Dr. Peter Schmidt Jutta Schmidt Astrid Kurzeja-Christinck. An: Prof. Dr.JörgBuchholz (PERSÖNLICH)
") An: Prof. Dr.JörgBuchholz (PERSÖNLICH) Prof. Dr. Peter Schmidt Jutta Schmidt Astrid KurzejaChristinck JohanneKippenbergWeg 2 2823 Bremen Tel.: 02 3228568 Fax 0322 385260 markt.forschung.kultur gbr evasys@marktforschungkultur.de
An: Prof. Dr.JörgBuchholz (PERSÖNLICH) Prof. Dr. Peter Schmidt Jutta Schmidt Astrid KurzejaChristinck JohanneKippenbergWeg 2 2823 Bremen Tel.: 02 3228568 Fax 0322 385260 markt.forschung.kultur gbr evasys@marktforschungkultur.de
Institut für Prozessrechentechnik, Automation und Robotik Bericht zum OpenLab am
 Bericht zum OpenLab am 02.02.2011 Mit dem Open Robot Lab hat das IPR erstmals in diesem Jahr seine Labore für interessierte Studentinnen und Studenten geöffnet. Unter dem Motto Forschung zum Anfassen und
Bericht zum OpenLab am 02.02.2011 Mit dem Open Robot Lab hat das IPR erstmals in diesem Jahr seine Labore für interessierte Studentinnen und Studenten geöffnet. Unter dem Motto Forschung zum Anfassen und
Kommunikation. Telemetrie und Telekommandos
 Kommunikation Telemetrie und Telekommandos Umfang: ca. 1-2 Zeitstunden Klassenbibliothek Qt Quatplay Benutzeroberfläche und Verbindungsaufbau Telemetrie Telekommandierung Bearbeitung der Quatplay Benutzeroberfläche
Kommunikation Telemetrie und Telekommandos Umfang: ca. 1-2 Zeitstunden Klassenbibliothek Qt Quatplay Benutzeroberfläche und Verbindungsaufbau Telemetrie Telekommandierung Bearbeitung der Quatplay Benutzeroberfläche
Programmieren und Technik
 Programmieren und Technik LEHRPLAN FÜR DAS KANTONALE ZUSATZFACH A. STUNDENDOTATION Klasse 1. 2. 3. 4. 5. 6. Wochenstunden 2 B. DIDAKTISCHE KONZEPTION Vorbemerkung Das Fach Programmieren und Technik bietet
Programmieren und Technik LEHRPLAN FÜR DAS KANTONALE ZUSATZFACH A. STUNDENDOTATION Klasse 1. 2. 3. 4. 5. 6. Wochenstunden 2 B. DIDAKTISCHE KONZEPTION Vorbemerkung Das Fach Programmieren und Technik bietet
FACHBEREICH TECHNIK INTERNET OF THINGS DIGITALE AUTOMATION BACHELOR OF ENGINEERING
 FACHBEREICH TECHNIK INTERNET OF THINGS DIGITALE AUTOMATION BACHELOR OF ENGINEERING INTERNET OF THINGS DIGITALE AUTOMATION (B. ENG.) Dinge und Systeme, die über das Internet eigenständig miteinander kommunizieren
FACHBEREICH TECHNIK INTERNET OF THINGS DIGITALE AUTOMATION BACHELOR OF ENGINEERING INTERNET OF THINGS DIGITALE AUTOMATION (B. ENG.) Dinge und Systeme, die über das Internet eigenständig miteinander kommunizieren
5 Flugsteuerungen. Christian Rattat, Multicopter selber bauen, dpunkt.verlag, ISBN D3kjd3Di38lk323nnm
 D3kjd3Di38lk323nnm 5 Flugsteuerungen Der Kern jedes Multicopters ist die Flugsteuerung. Diese setzt die Steuersignale der Fernsteuerung in verwertbare Signale für die Motoren um. Die Fernsteuerung liefert
D3kjd3Di38lk323nnm 5 Flugsteuerungen Der Kern jedes Multicopters ist die Flugsteuerung. Diese setzt die Steuersignale der Fernsteuerung in verwertbare Signale für die Motoren um. Die Fernsteuerung liefert
Simulationen mit Morse Simulator
 Simulationen mit Morse Simulator Übung 5 Victor Casas TU Ilmenau Page 1 Gliederung Systementwicklungsprozess und Abstraktion Aufgabenziel Einführung Morse Simulator Beispiel: Kollisionsvermeidung zwischen
Simulationen mit Morse Simulator Übung 5 Victor Casas TU Ilmenau Page 1 Gliederung Systementwicklungsprozess und Abstraktion Aufgabenziel Einführung Morse Simulator Beispiel: Kollisionsvermeidung zwischen
Umstellung auf. Inverted Classroom. Meine Erfahrungen. Textmasterformate durch Klicken bearbeiten
 Umstellung auf Zweite Ebene Inverted Classroom > Dritte Ebene Vierte Ebene Meine Erfahrungen DI Wolfgang Ortner 8. Mai 2018 Logistikum am Campus Steyr der FH OÖ Ausgangssituation LVA: LVA Zweite Wertstrom-
Umstellung auf Zweite Ebene Inverted Classroom > Dritte Ebene Vierte Ebene Meine Erfahrungen DI Wolfgang Ortner 8. Mai 2018 Logistikum am Campus Steyr der FH OÖ Ausgangssituation LVA: LVA Zweite Wertstrom-
Grad Modultitel Modulkürzel Modulform
 Grad Modultitel Modulkürzel Modulform M.A. D7. Historische Anthropologie/Europäische Ethnologie: Basismodul 1 M-D7-1 Pflicht Modulverantwortliche/r N. N. Dozent/inn/en Dozentinnen und Dozenten der Fachrichtung
Grad Modultitel Modulkürzel Modulform M.A. D7. Historische Anthropologie/Europäische Ethnologie: Basismodul 1 M-D7-1 Pflicht Modulverantwortliche/r N. N. Dozent/inn/en Dozentinnen und Dozenten der Fachrichtung
Roberta Workshops. Robotik in Forschung und Lehre. Roberta Workshops. 3 Schwerpunkte Robotik in Schulen
 Roberta Workshops Robotik in Forschung und Lehre Prof. Dr. Martina Lehser Fakultät für Ingenieurwissenschaften Fachrichtung Informatik 18.06.2009 ZeMA Roberta RegioZentrum Saarland Hochschule für Technik
Roberta Workshops Robotik in Forschung und Lehre Prof. Dr. Martina Lehser Fakultät für Ingenieurwissenschaften Fachrichtung Informatik 18.06.2009 ZeMA Roberta RegioZentrum Saarland Hochschule für Technik
Table of Contents. Table of Contents Kfz-Technik Sicherheit und Komfort Bremssysteme CarTrain Elektromechanische Feststellbremse
 Table of Contents Table of Contents Kfz-Technik Sicherheit und Komfort Bremssysteme CarTrain Elektromechanische Feststellbremse 1 2 2 3 4 4 Lucas Nülle GmbH Seite 1/8 https://www.lucas-nuelle.de Kfz-Technik
Table of Contents Table of Contents Kfz-Technik Sicherheit und Komfort Bremssysteme CarTrain Elektromechanische Feststellbremse 1 2 2 3 4 4 Lucas Nülle GmbH Seite 1/8 https://www.lucas-nuelle.de Kfz-Technik
Prof. Dr. Franz Josef Weiper. Lehrportfolio
 Lehrportfolio Inhaltsverzeichnis Kontext... 3 Lehr- und Lernverständnis... 4 Lehransatz und Lehrmethoden... 5 Learning Outcome... 5 Kontext Ich lehre u.a. das Fach Logistik IT und ERP Systeme in den Studiengängen
Lehrportfolio Inhaltsverzeichnis Kontext... 3 Lehr- und Lernverständnis... 4 Lehransatz und Lehrmethoden... 5 Learning Outcome... 5 Kontext Ich lehre u.a. das Fach Logistik IT und ERP Systeme in den Studiengängen
Praktikum Informationsverarbeitung
 Praktikum Informationsverarbeitung Lehrstuhl für Datenverarbeitung Prof. Dr.-Ing. Klaus Diepold Dipl.-Ing. Johannes Feldmaier Hallo! seit September 2011 daedalus Affective Computing Machine Learning &
Praktikum Informationsverarbeitung Lehrstuhl für Datenverarbeitung Prof. Dr.-Ing. Klaus Diepold Dipl.-Ing. Johannes Feldmaier Hallo! seit September 2011 daedalus Affective Computing Machine Learning &
Bachelor of Education (B.Ed.) Lehramt Gymnasium: Geschichte. Modul Historische Grundlagen
 Lehramt Gymnasium: Geschichte. Modul Historische Grundlagen") Modulkatalog Bachelor of Education (B.Ed.) Lehramt Gymnasium: Geschichte (PO 2015, Stand Juni 2016) Modul Historische Grundlagen Studiengang: Abschlussziel: Modulanbieter: Modulbeauftragte: Titel des Moduls:
Modulkatalog Bachelor of Education (B.Ed.) Lehramt Gymnasium: Geschichte (PO 2015, Stand Juni 2016) Modul Historische Grundlagen Studiengang: Abschlussziel: Modulanbieter: Modulbeauftragte: Titel des Moduls:
Kinderuniversität,
 Kinderuniversität, 22.1.2014 Quadrocopter- werden sie die Welt verändern? Roland Büchi Inhalt Wie funktioniert ein Quadrocopter? Was hat er für Sensoren? GPS Global Positioning System Kameras und Kamerahalterungen
Kinderuniversität, 22.1.2014 Quadrocopter- werden sie die Welt verändern? Roland Büchi Inhalt Wie funktioniert ein Quadrocopter? Was hat er für Sensoren? GPS Global Positioning System Kameras und Kamerahalterungen
Einführung. Rechnerarchitekturen Entwicklung und Ausführung von Programmen Betriebssysteme
 Teil I Einführung Überblick 1 2 Geschichte der Informatik 3 Technische Grundlagen der Informatik Rechnerarchitekturen Entwicklung und Ausführung von Programmen Betriebssysteme 4 Daten, Informationen, Kodierung
Teil I Einführung Überblick 1 2 Geschichte der Informatik 3 Technische Grundlagen der Informatik Rechnerarchitekturen Entwicklung und Ausführung von Programmen Betriebssysteme 4 Daten, Informationen, Kodierung
Vertiefungsmodul Machine Learning mit Python
 Wissenschaftliche Weiterbildung Berufsbegleitend. Zukunftsorientiert. Vielfältig. Vertiefungsmodul Machine Learning mit Python Berufsbegleitende Weiterbildung der Agentur für wissenschaftliche Weiterbildung
Wissenschaftliche Weiterbildung Berufsbegleitend. Zukunftsorientiert. Vielfältig. Vertiefungsmodul Machine Learning mit Python Berufsbegleitende Weiterbildung der Agentur für wissenschaftliche Weiterbildung
Kommunikation. Telemetrie
 Kommunikation Telemetrie Umfang: ca. 2-4 Zeitstunden Klassenbibliothek Qt Telemetrie Framework Quatplay Quatplay Benutzeroberfläche Telemetrie Implementierung Telemetrie senden Telemetrie emfangen Aufgaben
Kommunikation Telemetrie Umfang: ca. 2-4 Zeitstunden Klassenbibliothek Qt Telemetrie Framework Quatplay Quatplay Benutzeroberfläche Telemetrie Implementierung Telemetrie senden Telemetrie emfangen Aufgaben
BWL HIII 2013 Herr Dr. Möhlmann Kurs 9 BWL Erfasste Fragebögen = 19. Auswertungsteil der geschlossenen Fragen
 BWL HIII 0 Herr Dr. Möhlmann Kurs 9 BWL Erfasste Fragebögen = 9 Globalwerte + - Mittelwert der Fragen -9, -7, 9- und s=0,9 Auswertungsteil der geschlossenen Fragen Legende Relative Häufigkeiten der Antworten
BWL HIII 0 Herr Dr. Möhlmann Kurs 9 BWL Erfasste Fragebögen = 9 Globalwerte + - Mittelwert der Fragen -9, -7, 9- und s=0,9 Auswertungsteil der geschlossenen Fragen Legende Relative Häufigkeiten der Antworten
Studienbrief Systemtheorie und regelungstechnik
 Studienbrief Systemtheorie und regelungstechnik Weiterbildender Masterstudiengang Sensorsystemtechnik der Fakultät für Ingenieurwissenschaften und Informatik mit dem Abschluss Master of Science (M. Sc.)
Studienbrief Systemtheorie und regelungstechnik Weiterbildender Masterstudiengang Sensorsystemtechnik der Fakultät für Ingenieurwissenschaften und Informatik mit dem Abschluss Master of Science (M. Sc.)
Studienordnung für den Studiengang Applied Computer Science (Master of Science) an der Fakultät Informatik der Hochschule Schmalkalden
 an der Fakultät Informatik der Hochschule Schmalkalden") Studienordnung für den Studiengang Applied Computer Science (Master of Science) an der Fakultät Informatik der Hochschule Schmalkalden vom 12. Dezember 2018 Gemäß 3 Abs. 1, 34 Abs. 3 des Thüringer Hochschulgesetzes
Studienordnung für den Studiengang Applied Computer Science (Master of Science) an der Fakultät Informatik der Hochschule Schmalkalden vom 12. Dezember 2018 Gemäß 3 Abs. 1, 34 Abs. 3 des Thüringer Hochschulgesetzes
Hochschule Kaiserslautern // Kaiserslautern, 19. März
 www.hs-kl.de Elektrotechnik das heißt Elektrogeräte, Elektronische Schaltungen, Schaltschränke, Speicherprogrammierbare Steuerungen, Halbleiterchips, Mikrocontroller, Computernetzwerke, Internet, Mobile
www.hs-kl.de Elektrotechnik das heißt Elektrogeräte, Elektronische Schaltungen, Schaltschränke, Speicherprogrammierbare Steuerungen, Halbleiterchips, Mikrocontroller, Computernetzwerke, Internet, Mobile
Modulhandbuch Masterstudiengang: Meteorologie (Master of Science, M.Sc.)
") Modulhandbuch Masterstudiengang: (Master of Science, M.Sc.) (120 ECTS-Punkte, Studienbeginn Sommersemester) Auf Basis der Prüfungs- und Studienordnung vom 30. September 2009 88/410/---/M0/H/2009 Stand:
Modulhandbuch Masterstudiengang: (Master of Science, M.Sc.) (120 ECTS-Punkte, Studienbeginn Sommersemester) Auf Basis der Prüfungs- und Studienordnung vom 30. September 2009 88/410/---/M0/H/2009 Stand:
Prof. Dr. Peter Schmidt Jutta Schmidt Astrid Kurzeja-Christinck. An: Prof. Dr.SvenOppermann (PERSÖNLICH)
") An: Prof. Dr.SvenOppermann (PERSÖNLICH) Prof. Dr. Peter Schmidt Jutta Schmidt Astrid Kurzeja-Christinck Johanne-Kippenberg-Weg 12 28213 Bremen Tel.: 0421 322881 Fax 03212-13820 markt.forschung.kultur gbr
An: Prof. Dr.SvenOppermann (PERSÖNLICH) Prof. Dr. Peter Schmidt Jutta Schmidt Astrid Kurzeja-Christinck Johanne-Kippenberg-Weg 12 28213 Bremen Tel.: 0421 322881 Fax 03212-13820 markt.forschung.kultur gbr
Amtliche Mitteilung. Inhalt
 Amtliche Mitteilung 32. Jahrgang, Nr. 71 19. Dezember 2011 Seite 1 von 5 Inhalt Studienordnung für den Master-Studiengang Technische Informatik - Embedded Systems (Embedded Systems) des Fachbereichs VI
Amtliche Mitteilung 32. Jahrgang, Nr. 71 19. Dezember 2011 Seite 1 von 5 Inhalt Studienordnung für den Master-Studiengang Technische Informatik - Embedded Systems (Embedded Systems) des Fachbereichs VI
Qualifizierung als TrainerIn im Wissenschaftsbereich. Weiterbildungsprogramm
 1 ZWM 2016 Weiterbildungsprogramm 2 Hintergrund und Thematik Zielgruppe Konzept /Methodik Die interne Weiterbildung an Hochschulen und anderen wissenschaftlichen Einrichtungen umfasst vielfältige Aktivitäten
1 ZWM 2016 Weiterbildungsprogramm 2 Hintergrund und Thematik Zielgruppe Konzept /Methodik Die interne Weiterbildung an Hochschulen und anderen wissenschaftlichen Einrichtungen umfasst vielfältige Aktivitäten
Prof. Dr. Peter Schmidt Jutta Schmidt Astrid Kurzeja-Christinck. An: Prof. Dr.SvenOppermann (PERSÖNLICH)
") An: Prof. Dr.SvenOppermann (PERSÖNLICH) Prof. Dr. Peter Schmidt Jutta Schmidt Astrid Kurzeja-Christinck Johanne-Kippenberg-Weg 12 28213 Bremen Tel.: 0421 32285681 Fax 03212-1385260 markt.forschung.kultur
An: Prof. Dr.SvenOppermann (PERSÖNLICH) Prof. Dr. Peter Schmidt Jutta Schmidt Astrid Kurzeja-Christinck Johanne-Kippenberg-Weg 12 28213 Bremen Tel.: 0421 32285681 Fax 03212-1385260 markt.forschung.kultur
MASCHIENEN UND ROBOTERTECHNIK FÜR DIE TECHNISCHE AUSBILDUNG 2015 INNOVATIVE DIDAKTIK GMBH
 MASCHIENEN UND ROBOTERTECHNIK FÜR DIE TECHNISCHE AUSBILDUNG DER BESTE WEG DIE JUGEND FÜR TECHNIK ZU BEGEISTERN Um Kinder für Technik zu begeistern, muss man ihnen die Möglichkeit geben, technische Phänomene
MASCHIENEN UND ROBOTERTECHNIK FÜR DIE TECHNISCHE AUSBILDUNG DER BESTE WEG DIE JUGEND FÜR TECHNIK ZU BEGEISTERN Um Kinder für Technik zu begeistern, muss man ihnen die Möglichkeit geben, technische Phänomene
STUDIENANGEBOT TECHNISCHE INFORMATIK DEN TECHNISCHEN FORTSCHRITT MITGESTALTEN
 STUDIENANGEBOT TECHNISCHE INFORMATIK DEN TECHNISCHEN FORTSCHRITT MITGESTALTEN WARUM TECHNISCHE INFORMATIK STUDIEREN? Computer und Software sind im Alltag allgegenwärtig. PCs, Handys, oder Navigationsgeräte
STUDIENANGEBOT TECHNISCHE INFORMATIK DEN TECHNISCHEN FORTSCHRITT MITGESTALTEN WARUM TECHNISCHE INFORMATIK STUDIEREN? Computer und Software sind im Alltag allgegenwärtig. PCs, Handys, oder Navigationsgeräte
(a 1, b 1 ) Steuerbewegung in Richtung des Sollverlaufs
 Steuerbewegung in Richtung des Sollverlaufs") Entwicklung und Umsetzung eines Messkonzepts zur Bestimmung der rotatorischen Ausrichtung eines Kranbedieners mit Funkfernsteuerung BA / SA / MA am Lehrstuhl für Fördertechnik Materialfluss Logistik Kontakt:
Entwicklung und Umsetzung eines Messkonzepts zur Bestimmung der rotatorischen Ausrichtung eines Kranbedieners mit Funkfernsteuerung BA / SA / MA am Lehrstuhl für Fördertechnik Materialfluss Logistik Kontakt:
Lehr- und Forschungsprojekt Balancer
 Lehr- und Forschungsprojekt Balancer Prof. Dr.-Ing. Tobias Flämig-Vetter Email: tobias.flaemig@dhbw-stuttgart.de Tel: +49 711 1849 636 http://wwwlehre.dhbw-stuttgart.de/~flaemig/studienarbeiten/balancer/
Lehr- und Forschungsprojekt Balancer Prof. Dr.-Ing. Tobias Flämig-Vetter Email: tobias.flaemig@dhbw-stuttgart.de Tel: +49 711 1849 636 http://wwwlehre.dhbw-stuttgart.de/~flaemig/studienarbeiten/balancer/
Cyber-X-Systeme Robotik/KI in Automatisierungs-Anwendungen 2026
 Cyber-X-Systeme Robotik/KI in Automatisierungs-Anwendungen 2026 marion-abschlussmeilenstein bei CLAAS Prof. Dr. Joachim Hertzberg - DFKI Cyber-X-Systeme marion-abschlussmeilenstein 19.09.2013 Prof. Dr.
Cyber-X-Systeme Robotik/KI in Automatisierungs-Anwendungen 2026 marion-abschlussmeilenstein bei CLAAS Prof. Dr. Joachim Hertzberg - DFKI Cyber-X-Systeme marion-abschlussmeilenstein 19.09.2013 Prof. Dr.
Prof. Dr. Peter Schmidt Jutta Schmidt Astrid Kurzeja-Christinck. An: Prof. Dr.SvenOppermann (PERSÖNLICH)
") An: Prof. Dr.SvenOppermann (PERSÖNLICH) Prof. Dr. Peter Schmidt Jutta Schmidt Astrid Kurzeja-Christinck Johanne-Kippenberg-Weg 12 28213 Bremen Tel.: 0421 32285681 Fax 03212-1385260 markt.forschung.kultur
An: Prof. Dr.SvenOppermann (PERSÖNLICH) Prof. Dr. Peter Schmidt Jutta Schmidt Astrid Kurzeja-Christinck Johanne-Kippenberg-Weg 12 28213 Bremen Tel.: 0421 32285681 Fax 03212-1385260 markt.forschung.kultur
Automotive Software Engineering in der universitären Ausbildung Ziele und Inhalte eines Master-Studiengangs
 Rahmendaten Struktur des Studiengangs Inhalte des Studiengangs Automotive Software Engineering in der universitären Ausbildung Ziele und Inhalte eines Master-Studiengangs Prof. Dr. Dr. Manfred Broy, Dr.
Rahmendaten Struktur des Studiengangs Inhalte des Studiengangs Automotive Software Engineering in der universitären Ausbildung Ziele und Inhalte eines Master-Studiengangs Prof. Dr. Dr. Manfred Broy, Dr.
Artikel I. Die Modulbeschreibung von Modul 1 erhält folgende neue Fassung:
 2846 Erste Ordnung zur Änderung der Prüfungsordnung für den Masterstudiengang Geophysik an der Westfälischen Wilhelms-Universität vom 12. September 2013 vom 10. November 2014 Aufgrund der 2 Abs. 4, 64
2846 Erste Ordnung zur Änderung der Prüfungsordnung für den Masterstudiengang Geophysik an der Westfälischen Wilhelms-Universität vom 12. September 2013 vom 10. November 2014 Aufgrund der 2 Abs. 4, 64
Studienordnung (Satzung) für den weiterbildenden Online-Master- Studiengang Betriebswirtschaftslehre am Fachbereich Wirtschaft der Fachhochschule Kiel
 für den weiterbildenden Online-Master- Studiengang Betriebswirtschaftslehre am Fachbereich Wirtschaft der Fachhochschule Kiel") Studienordnung (Satzung) für den weiterbildenden Online-Master- Studiengang Betriebswirtschaftslehre am Fachbereich Wirtschaft der Fachhochschule Kiel Vom 10. April 014 Aufgrund des 5 Abs. 10 des Gesetzes
Studienordnung (Satzung) für den weiterbildenden Online-Master- Studiengang Betriebswirtschaftslehre am Fachbereich Wirtschaft der Fachhochschule Kiel Vom 10. April 014 Aufgrund des 5 Abs. 10 des Gesetzes
Propädeutischen Fächer
 Studienplan für die Propädeutischen Fächer und die Zusatzfächer angeboten von der Math.-Natw. Fakultät im Rahmen eines Bachelor of Science oder für andere Studiengänge mit diesen Programmen Zusatzfächer
Studienplan für die Propädeutischen Fächer und die Zusatzfächer angeboten von der Math.-Natw. Fakultät im Rahmen eines Bachelor of Science oder für andere Studiengänge mit diesen Programmen Zusatzfächer
Systeme I: Betriebssysteme. Willkommen. Wolfram Burgard Henrich Kolkhorst, Johannes Meyer Andreas Wachaja
 Systeme I: Betriebssysteme Willkommen Wolfram Burgard Henrich Kolkhorst, Johannes Meyer Andreas Wachaja 1 Veranstalter Dozent Prof. Dr. Wolfram Burgard Gebäude 080 Sprechstunde: nach Vereinbarung burgard@informatik.uni-freiburg.de
Systeme I: Betriebssysteme Willkommen Wolfram Burgard Henrich Kolkhorst, Johannes Meyer Andreas Wachaja 1 Veranstalter Dozent Prof. Dr. Wolfram Burgard Gebäude 080 Sprechstunde: nach Vereinbarung burgard@informatik.uni-freiburg.de
Deskriptive Programmierung Jun.-Prof. Dr. Janis Voigtländer
 Deskriptive Programmierung Jun.-Prof. Dr. Janis Voigtländer Veranstaltungsbewertung der Fachschaft Informatik 12. Oktober 2015 Abgegebene Fragebögen: 15 1 Bewertung der Vorlesung 1.1 Bitte beurteile die
Deskriptive Programmierung Jun.-Prof. Dr. Janis Voigtländer Veranstaltungsbewertung der Fachschaft Informatik 12. Oktober 2015 Abgegebene Fragebögen: 15 1 Bewertung der Vorlesung 1.1 Bitte beurteile die
Inhaltsverzeichnis. CD-ROM zum Buch Inhalt der CD-ROM GPL (General Public License) Systemvoraussetzung 13
 Systemvoraussetzung 13") Inhaltsverzeichnis CD-ROM zum Buch 13 1.1 Inhalt der CD-ROM 13 1.2 GPL (General Public License) 13 1.3 Systemvoraussetzung 13 Der Einstieg in die Robotik 15 Mikrocontrolter-Grundlagen 17 3.1 Aufbau und
Inhaltsverzeichnis CD-ROM zum Buch 13 1.1 Inhalt der CD-ROM 13 1.2 GPL (General Public License) 13 1.3 Systemvoraussetzung 13 Der Einstieg in die Robotik 15 Mikrocontrolter-Grundlagen 17 3.1 Aufbau und
Prof. Dr. Bodo Schaab. Servicestelle Evaluation E 202. Neustadtswall Bremen. Mit freundlichen Grüßen
 Prof. Dr. Bodo Schaab Servicestelle Evaluation E 0 Neustadtswall 0 899 Bremen Bodo.Schaab@hsbremen.de Mit freundlichen Grüßen Prof. Dr. Buchholz, Regelungstechnik und Flugregelung SS Prof. Dr. Jörg J.
Prof. Dr. Bodo Schaab Servicestelle Evaluation E 0 Neustadtswall 0 899 Bremen Bodo.Schaab@hsbremen.de Mit freundlichen Grüßen Prof. Dr. Buchholz, Regelungstechnik und Flugregelung SS Prof. Dr. Jörg J.
Physik und Sensorik. Reflexion. Chemnitz 8. Oktober 2017 Prof. Dr. Uli Schwarz
 Reflexion Modul Physik und Sensorik Inhalte: Fortgeschrittene Themen der Physik und Sensorik Praktische Übungen zur sensorischen Erfassung physikalischer Messgrößen Durchführung eines Kleingruppenprojektes
Reflexion Modul Physik und Sensorik Inhalte: Fortgeschrittene Themen der Physik und Sensorik Praktische Übungen zur sensorischen Erfassung physikalischer Messgrößen Durchführung eines Kleingruppenprojektes
Anwendungen und Methoden der modernen Robotik
 Anwendungen und Methoden der modernen Robotik Jianwei Zhang FB Informatik Universität Hamburg Das heutige Programm Motivation der Seminararbeit: eine kurze Einführung in die Robotik, Besonderheiten Einführung
Anwendungen und Methoden der modernen Robotik Jianwei Zhang FB Informatik Universität Hamburg Das heutige Programm Motivation der Seminararbeit: eine kurze Einführung in die Robotik, Besonderheiten Einführung
6. KIRAS Fachtagung 18. Oktober 2016, Wien. RelCon. Reliable Control of Semi-Autonomous Platforms
 6. KIRAS Fachtagung 18. Oktober 2016, Wien Reliable Control of Semi-Autonomous Platforms Verlässliche Führung semi-autonomer Fahrzeuge Förderprogramm: KIRAS Fördergeber: BMVIT / FFG Budget: Gesamt: ca.
6. KIRAS Fachtagung 18. Oktober 2016, Wien Reliable Control of Semi-Autonomous Platforms Verlässliche Führung semi-autonomer Fahrzeuge Förderprogramm: KIRAS Fördergeber: BMVIT / FFG Budget: Gesamt: ca.
Das Praktikum mit Seminar vertieft die in der Vorlesung erworbenen Fähigkeiten in theoretischer und praktischer Hinsicht:
 66/2006 vom 13.10.2006 FU-Mitteilungen Seite 25 e. Module affiner Bereiche Modul: Chemie für Physiker Aneignung der Grundlagen der Chemie mit Ausnahme der organischen Chemie sowie Erlangung eines Allgemeinwissens
66/2006 vom 13.10.2006 FU-Mitteilungen Seite 25 e. Module affiner Bereiche Modul: Chemie für Physiker Aneignung der Grundlagen der Chemie mit Ausnahme der organischen Chemie sowie Erlangung eines Allgemeinwissens
Modulhandbuch Nebenfach: Geschichte für Bachelorstudiengänge
 Modulhandbuch (60 ECTS-Punkte) Studienbeginn: Winter- und Sommersemester Auf Basis der Prüfungs- und Studienordnung vom 16.03.2010 83/068/---/N3/N/2010 Stand: 08.11.2012 Inhaltsverzeichnis Abkürzungen
Modulhandbuch (60 ECTS-Punkte) Studienbeginn: Winter- und Sommersemester Auf Basis der Prüfungs- und Studienordnung vom 16.03.2010 83/068/---/N3/N/2010 Stand: 08.11.2012 Inhaltsverzeichnis Abkürzungen
Modulübersichten Beifach Philosophie (B.A.)
") Modulübersichten Beifach (B.A.) Modul: Basismodul Systematik der Studiengang: Abschlussziel: Modulanbieter: Modulbeauftragter: Titel des Moduls: Stundenumfang, ECTS-Punkte, Arbeitsaufwand: Lehrveranstaltungen:
Modulübersichten Beifach (B.A.) Modul: Basismodul Systematik der Studiengang: Abschlussziel: Modulanbieter: Modulbeauftragter: Titel des Moduls: Stundenumfang, ECTS-Punkte, Arbeitsaufwand: Lehrveranstaltungen:
(3) Der für den erfolgreichen Abschluss des Studiums erforderliche Umfang des Studiums beträgt 240 Leistungspunkte.
 Der für den erfolgreichen Abschluss des Studiums erforderliche Umfang des Studiums beträgt 240 Leistungspunkte.") Prüfungsordnung Bachelorprüfungsordnung der Hochschule Bremen für den Dualen Studiengang Informatik (Fachspezifischer Teil) Vom.. Der Rektor der Hochschule Bremen hat am... 200.. gemäß 110 Abs. 2 des Bremischen
Prüfungsordnung Bachelorprüfungsordnung der Hochschule Bremen für den Dualen Studiengang Informatik (Fachspezifischer Teil) Vom.. Der Rektor der Hochschule Bremen hat am... 200.. gemäß 110 Abs. 2 des Bremischen
Staatsexamen Lehramt an Grundschulen Ethik/Philosophie
 06-003-401-GS Grundlagen der Ethik Introduction to Ethics 1. Semester jedes Wintersemester Vorlesung "Einführung in die Theoretische Philosophie" (2 SWS) = 30 h Präsenzzeit und 70 h Seminar "Grundlagen
06-003-401-GS Grundlagen der Ethik Introduction to Ethics 1. Semester jedes Wintersemester Vorlesung "Einführung in die Theoretische Philosophie" (2 SWS) = 30 h Präsenzzeit und 70 h Seminar "Grundlagen
Anlage 2: Modulübersicht und Modulbeschreibungen. Modulübersicht. Modul LP 1 Benotet/ unbenoted
 Modulübersicht Modul LP 1 Benotet/ unbenoted Regelprüfungstermin 2 Beginn Wintersemester Regelprüfungstermin 2 Beginn Sommersemester Pflichtmodule Einführung in Visual Computing benotet FS 1 FS 1 Forschungsthemen
Modulübersicht Modul LP 1 Benotet/ unbenoted Regelprüfungstermin 2 Beginn Wintersemester Regelprüfungstermin 2 Beginn Sommersemester Pflichtmodule Einführung in Visual Computing benotet FS 1 FS 1 Forschungsthemen
Integration eines pneumatischen Roboters in die Robotics API
 Integration eines pneumatischen Roboters in die Robotics API Ziel: Integration eines AirArms in die Robotics API und Umsetzung eines Demo-Anwendung Idee: Die MRK (Mensch Roboter Kooperation) bekommt zunehmend
Integration eines pneumatischen Roboters in die Robotics API Ziel: Integration eines AirArms in die Robotics API und Umsetzung eines Demo-Anwendung Idee: Die MRK (Mensch Roboter Kooperation) bekommt zunehmend
Praktikum: KHR1 Microcontroller Steuerung Bearbeiter: Ronald Lautenschläger Betreuer: Benjamin Reh, Katja Mombaur
 Praktikum: KHR1 Microcontroller Steuerung Bearbeiter: Ronald Lautenschläger Betreuer: Benjamin Reh, Katja Mombaur Übersicht Kondo KHR1 Aufgabenstellung RCB1 Steuerungsplatine Steuerungssoftware Heart2Heart
Praktikum: KHR1 Microcontroller Steuerung Bearbeiter: Ronald Lautenschläger Betreuer: Benjamin Reh, Katja Mombaur Übersicht Kondo KHR1 Aufgabenstellung RCB1 Steuerungsplatine Steuerungssoftware Heart2Heart
Anlage 11 b Fachspezifische Anlage für das Fach Informatik (Zwei-Fächer-Bachelor) vom Lesefassung -
 vom Lesefassung -") Anlage 11 b Fachspezifische Anlage für das Fach Informatik (Zwei-Fächer-Bachelor) vom 08.09.2017 - Lesefassung - Die Zwei-Fächer-Bachelor-Studiengänge Informatik mit 30 bzw. 60 Kreditpunkten () bieten
Anlage 11 b Fachspezifische Anlage für das Fach Informatik (Zwei-Fächer-Bachelor) vom 08.09.2017 - Lesefassung - Die Zwei-Fächer-Bachelor-Studiengänge Informatik mit 30 bzw. 60 Kreditpunkten () bieten
Studienordnung. für den Studiengang. Automobilmanagement. Bachelor of Science. Berufsakademie Sachsen Staatliche Studienakademie Glauchau 4AM-A
 für den Studiengang Automobilmanagement Bachelor of Science Berufsakademie Sachsen Staatliche Studienakademie Glauchau (Version 2.0) Die ist rechtsgeprüft. Stand Oktober 2015 Studiengang Automobilmanagement
für den Studiengang Automobilmanagement Bachelor of Science Berufsakademie Sachsen Staatliche Studienakademie Glauchau (Version 2.0) Die ist rechtsgeprüft. Stand Oktober 2015 Studiengang Automobilmanagement
Bachelorarbeit Erweiterung eines mobilen Roboters
 Bachelorarbeit Erweiterung eines mobilen Roboters Beschreibung Das CAMRA-Labor verfügt über einen mobilen Roboter, welcher in Bezug auf seine Hardware und Software weiter ausgebaut werden soll. Aufgaben
Bachelorarbeit Erweiterung eines mobilen Roboters Beschreibung Das CAMRA-Labor verfügt über einen mobilen Roboter, welcher in Bezug auf seine Hardware und Software weiter ausgebaut werden soll. Aufgaben
Interdisziplinärer Masterstudiengang
 Interdisziplinärer Masterstudiengang Robotics, Cognition, Intelligence Robotik und kognitive Systeme Konvergenz dreier Gebiete der Natur- und Ingenieurwissenschaften Robotik, Computer Vision und Sensorfusion,
Interdisziplinärer Masterstudiengang Robotics, Cognition, Intelligence Robotik und kognitive Systeme Konvergenz dreier Gebiete der Natur- und Ingenieurwissenschaften Robotik, Computer Vision und Sensorfusion,
APRIL 2017 ABB Robotics Education Package. Yves Brunner, Sales Engineer,
 APRIL 2017 ABB Robotics Education Package Yves Brunner, Sales Engineer, yves.brunner@ch.abb.com, +41 79 573 79 60 DAS EDUCATION PACKAGE BIETET DIE GESAMTE NOTWENDIGE HARD- UND SOFTWARE FÜR EINEN MODERNEN
APRIL 2017 ABB Robotics Education Package Yves Brunner, Sales Engineer, yves.brunner@ch.abb.com, +41 79 573 79 60 DAS EDUCATION PACKAGE BIETET DIE GESAMTE NOTWENDIGE HARD- UND SOFTWARE FÜR EINEN MODERNEN
Prof. Dr.-Ing. Gerhard Schmidt. etit-104: Signale und Systeme I Erfasste Fragebögen = 11. Auswertungsteil der geschlossenen Fragen
 Prof. Dr.-Ing. Gerhard Schmidt etit-0: Signale und Systeme I Erfasste Fragebögen = Prof. Dr.-Ing. Gerhard Schmidt, etit-0: Signale und Systeme I Auswertungsteil der geschlossenen Fragen Legende Relative
Prof. Dr.-Ing. Gerhard Schmidt etit-0: Signale und Systeme I Erfasste Fragebögen = Prof. Dr.-Ing. Gerhard Schmidt, etit-0: Signale und Systeme I Auswertungsteil der geschlossenen Fragen Legende Relative
Fakultät für Informatik und Mathematik Fachstudien- und -prüfungsordnung für den Masterstudiengang Mobile and Embedded Systems vom 20.
 Fakultät für Informatik und Mathematik Fachstudien- und -prüfungsordnung für den Masterstudiengang Mobile and Embedded Systems vom 20. September 2016 Fachstudien- und -prüfungsordnung für den Studiengang
Fakultät für Informatik und Mathematik Fachstudien- und -prüfungsordnung für den Masterstudiengang Mobile and Embedded Systems vom 20. September 2016 Fachstudien- und -prüfungsordnung für den Studiengang
Lehrveranstaltungen im Wintersemester 2015/2016, Stand: V V57.01, V9.01 a Mi V im PWR 27 2 V V27.
 Direktor: Prof. Dr.-Ing. Walter Fichter Lehrveranstaltungen im Wintersemester 2015/2016, Stand: 14.10.2015 Thema SWS Ort Zeit Vortragende Flugmechanik, Flugmechanik, freiwillige Übung Mehrgrößenregelung,
Direktor: Prof. Dr.-Ing. Walter Fichter Lehrveranstaltungen im Wintersemester 2015/2016, Stand: 14.10.2015 Thema SWS Ort Zeit Vortragende Flugmechanik, Flugmechanik, freiwillige Übung Mehrgrößenregelung,
Information zum B.Sc. Studienschwerpunkt Automatisierung und Systemdynamik
 Information zum B.Sc. Studienschwerpunkt Automatisierung und Systemdynamik Univ.-Prof. Dr.-Ing. Andreas Kroll (FG Mess- & Regelungstechnik) Univ.-Prof. Dr.-Ing. Ludger Schmidt (FG Mensch-Maschine-Systemtechnik)
Information zum B.Sc. Studienschwerpunkt Automatisierung und Systemdynamik Univ.-Prof. Dr.-Ing. Andreas Kroll (FG Mess- & Regelungstechnik) Univ.-Prof. Dr.-Ing. Ludger Schmidt (FG Mensch-Maschine-Systemtechnik)
Studiengang. Mechatronik. Master of Engineering (M. Eng.) Mechatronik. (M. Eng.)
 Mechatronik. (M. Eng.)") Studiengang Mechatronik Master of Engineering (M. Eng.) www.htwg-konstanz.de/mme Mechatronik (M. Eng.) Steckbrief Regelstudienzeit 3 Semester Studienbeginn Studienplätze WS Wintersemester SS Sommersemester
Studiengang Mechatronik Master of Engineering (M. Eng.) www.htwg-konstanz.de/mme Mechatronik (M. Eng.) Steckbrief Regelstudienzeit 3 Semester Studienbeginn Studienplätze WS Wintersemester SS Sommersemester
Der Inhalt von Hausarbeit, Vortrag und Diskussionsrunde hängt von der fachlichen Ausrichtung der jeweiligen Seminargruppe ab.
 Modulbeschreibung Code III.5 Modulbezeichnung Methodische Grundlagen III Beitrag des Moduls zu den Studienzielen Qualifikationsziele (vgl. Leitfaden Punkt 3) Es ist das Ziel des Moduls, das nur aus einer
Modulbeschreibung Code III.5 Modulbezeichnung Methodische Grundlagen III Beitrag des Moduls zu den Studienzielen Qualifikationsziele (vgl. Leitfaden Punkt 3) Es ist das Ziel des Moduls, das nur aus einer
MODULHANDBUCH für das Bezugsfach Geographie im Fach Sachunterricht
 MODULHANDBUCH für das Bezugsfach Geographie im Fach Sachunterricht Gemäß der Fachspezifische Studien und Prüfungsordnung für das Bachelor und Masterstudium im Fach Sachunterricht vom 06. März 203 Stand
MODULHANDBUCH für das Bezugsfach Geographie im Fach Sachunterricht Gemäß der Fachspezifische Studien und Prüfungsordnung für das Bachelor und Masterstudium im Fach Sachunterricht vom 06. März 203 Stand
Prof. Dr. Peter Schmidt Jutta Schmidt Astrid Kurzeja-Christinck. An: [Prof. Dr.SvenOppermann] (PERSÖNLICH)
![Prof. Dr. Peter Schmidt Jutta Schmidt Astrid Kurzeja-Christinck. An: [Prof. Dr.SvenOppermann] (PERSÖNLICH)](/thumbs/97/134720765.jpg "Prof. Dr. Peter Schmidt Jutta Schmidt Astrid Kurzeja-Christinck. An: [Prof. Dr.SvenOppermann] (PERSÖNLICH)") An: [Prof. Dr.SvenOppermann] (PERSÖNLICH) Prof. Dr. Peter Schmidt Jutta Schmidt Astrid Kurzeja-Christinck Johanne-Kippenberg-Weg 12 28213 Bremen Tel.: 0421 32285681 Fax 03212-1385260 markt.forschung.kultur
An: [Prof. Dr.SvenOppermann] (PERSÖNLICH) Prof. Dr. Peter Schmidt Jutta Schmidt Astrid Kurzeja-Christinck Johanne-Kippenberg-Weg 12 28213 Bremen Tel.: 0421 32285681 Fax 03212-1385260 markt.forschung.kultur
Modulkatalog Bachelor of Arts (B.A.) Beifach Germanistik (PO 2012, Stand Januar 2016)
 Beifach Germanistik (PO 2012, Stand Januar 2016)") Modulkatalog Bachelor of Arts (B.A.) Beifach Germanistik (PO 2012, Stand Januar 2016) Basismodul Literaturwissenschaft Studiengang: B. A. Germanistik (Beifach) Abschlussziel: Bachelor of Arts B. A. Modulanbieter:
Modulkatalog Bachelor of Arts (B.A.) Beifach Germanistik (PO 2012, Stand Januar 2016) Basismodul Literaturwissenschaft Studiengang: B. A. Germanistik (Beifach) Abschlussziel: Bachelor of Arts B. A. Modulanbieter:
Modulübersichten Beifach Germanistik (B.A.)
") Modulübersichten Beifach Germanistik (B.A.) Modul: Basismodul Literaturwissenschaft Studiengang: B. A. Germanistik (Beifach) Abschlussziel: Bachelor of Arts B. A. Modulanbieter: Universität Mannheim Philosophische
Modulübersichten Beifach Germanistik (B.A.) Modul: Basismodul Literaturwissenschaft Studiengang: B. A. Germanistik (Beifach) Abschlussziel: Bachelor of Arts B. A. Modulanbieter: Universität Mannheim Philosophische
Regelungstechnik. Eine kurze Einführung
 Regelungstechnik Eine kurze Einführung Regelungstechnik Übersicht und Begriffe Zweipunkt-Regler PID-Regler Weitergehende Konzepte Praktische Umsetzung Simulation Regelung vs. Steuerung Wert einstellen,
Regelungstechnik Eine kurze Einführung Regelungstechnik Übersicht und Begriffe Zweipunkt-Regler PID-Regler Weitergehende Konzepte Praktische Umsetzung Simulation Regelung vs. Steuerung Wert einstellen,
ENTWICKLER UND ENTHUSIASTEN UNSERE EXPERTEN FÜR IHRE EFFEKTIVE DIGITALISIERUNG
 ENTWICKLER UND ENTHUSIASTEN UNSERE EXPERTEN FÜR IHRE EFFEKTIVE DIGITALISIERUNG SOFTWARE SOLUTIONS Wir sind Ihr Partner für die digitale Vernetzung in der Industrie. Wir vereinfachen und optimieren industrielle
ENTWICKLER UND ENTHUSIASTEN UNSERE EXPERTEN FÜR IHRE EFFEKTIVE DIGITALISIERUNG SOFTWARE SOLUTIONS Wir sind Ihr Partner für die digitale Vernetzung in der Industrie. Wir vereinfachen und optimieren industrielle
Auswertung zur Veranstaltung Ausgewählte Themen aus dem Bereich Software Engineering - Vorgehensmodelle im Software Engineering
 Auswertung zur Veranstaltung Ausgewählte Themen aus dem Bereich Software Engineering - Vorgehensmodelle im Software Engineering Liebe Dozentin, lieber Dozent, anbei erhalten Sie die Ergebnisse der Evaluation
Auswertung zur Veranstaltung Ausgewählte Themen aus dem Bereich Software Engineering - Vorgehensmodelle im Software Engineering Liebe Dozentin, lieber Dozent, anbei erhalten Sie die Ergebnisse der Evaluation