Autonome Roboter und Internet der Dinge in untertägigen Anlagen
|
|
|
- Max Frei
- vor 5 Jahren
- Abrufe
Transkript


 die Nachwuchsforschergruppe")
1 ARIDuA Autonome Roboter und Internet der Dinge in untertägigen Anlagen M.Sc. Sebastian Varga, Institut für Markscheidewesen und Geodäsie - TU Freiberg, Dipl.-Ing. Steve Grehl Seit dem 1. Juli 2017 fördert der Freistaat Sachsen aus den Fördermitteln des Europäischen Sozialfonds (ESF) die Nachwuchsforschergruppe zum Thema Autonome Roboter und Internet der Dinge in untertägigen Anlagen.
2 Übersicht über die heutigen Themen Vorstellung Anforderung Sensorik/IoT Robotik Geologische Bewertung Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Max Mustermann Veranstaltungstitel



3 Informationsdreieck Interaktion Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Steve Grehl 19. Geokinematischer Tag
4 R S I A Robotik Interaktion, Navigation, Manipulation Datenacquise Sensorik, Internet der Dinge Datenintegration Visualisierung, Data Mining, Big Data Analyseverfahren Geologie, Abbauplannung


5 M.Sc. Robert Lösch Robotik Dipl.-Ing. Steve Grehl Engineering & Computing M. Sc. Frederic Güth Elektronik- und Sensormaterialien M. Sc. Nasrin Rezaei-Abadchi Big Data Dipl.-Ing. Franziska Wolf Bergbau M. Sc. Sebastian Varga Geologie

6 R Prof. B. Jung Virtuelle Realität und Multimedia Fakultät 1 S Prof. Y. Joseph Elektronik- und Sensormaterialien Fakultät 5 I A Prof. A. Rehkopf Automatisierungstechnik Prof. H. Mischo Spezialverfahren und Abbautechnik unter Tage Prof. J. Benndorf Geodäsie und Markscheidewesen Fakultät 4 Fakultät 3


7 Design und Aufbau eines Smart Sensor Netzwerkes R S I A Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Frederic Güth Exkursion: Dräger

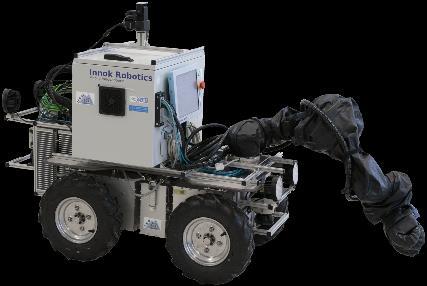
8 Anwendung von Robotern untertage R Transportaufga ben (Grubenwehrequipment) Kartierung und Erstellung 3D- Modell Visualisierung der Umgebung durch Fotos und Videobilder A Aufbau eines drahtlosen Datennetzwerkes Sensordatenaufnahme Geologische Erkundung Informationshaushalt des Forschungsroboters Julius beim Einsatz untertage Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Steve Grehl 19. Geokinematischer Tag


9 S A ARIDuA Vorstellung Anforderung Sensorik/IoT Robotik Geologische Bewertung Anwendung von IoT untertage Personentracking Maschinentracking Einbindung von Kommunikationsmedien Schaffung eines drahtlosen Datennetzwerkes Stationäres Monitoring von Sensordaten Monitoring von Sensordaten mit mobilen Sensorboxen Bluetooth Beacon zum Personentracking im Helm Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Steve Grehl 19. Geokinematischer Tag 2018 Mobile Netzwerkboxen unter Tage 9
 Schutz der Komponenten gegenüber Umwelteinflüssen O 2 Temperatur CO")
10 Smart Sensor Box S Komplexe Sensorik Gassensorik CO, NO2, O2, CO2 Strahlung, insbesondere Radon Flüssigkeitsanalytik, Bergwerkswässer Gase Wetter Smart Sensor Box Wasser Konstruktion einer Smart Sensor Box Aufnahme aller relevanten Komponenten Dimensioniert für Transport und Installation durch Roboter (202 x 122 x 75 mm) Schutz der Komponenten gegenüber Umwelteinflüssen O 2 Temperatur CO Standort ph-wert CO 2 Luftfeuchte H 2 S Luftdruck NO x Rn (Wettergeschwindigkeit) Orientierung Sulfatgehalt Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Steve Grehl 19. Geokinematischer Tag



11 Manipulation der Smart Sensor Box R S RGB Image Depth Image Pointcloud Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Steve Grehl 19. Geokinematischer Tag

 Roboter und Internet der")

12 Design und Anforderungen an den Roboter R A Fortbewegung: unebene Sohle, Schienen, aufgeschüttete lose Gesteinsmassen, Wasser Autonome Fahrweise oder stabile Fernsteuerung Bedienbarkeit für Bergmann Geringe Abmaße Akkukapazität Lokalisierung in georeferenzierter Karte (auch Höhen) Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Steve Grehl 19. Geokinematischer Tag 2018 Sicherheit: Ex- Schutz, Akkus, Vermeiden des Versperren von Fluchtwegen 12
13 Wegpunktnavigation unter Tage R Simultanes Lokalisieren und Mapping (SLAM) zur Kartengenerierung Vorgabe globaler Wegpunkte durch einen Experten Lokalisierung über optische Merkmale im RGB Bild Hindernisvermeidung durch 3D und 2D Laserscanner über eine lokale Pfadplanung Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Steve Grehl 19. Geokinematischer Tag
14 Automatisierte geologische Kartierung Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Sebastian Varga 19. Geokinematischer Tag


15 Aufgabenstellung 1. Differenzierung zwischen Erzgang und nicht werthaltigen Gestein, d.h. Ermittlung geologischer Grenzschicht 2. Identifikation der Erzminerale, d.h. geologische Kartierung des Erzganges unter Angabe für der Auftrittswahrscheinlichkeit einer Mineralklasse pro Gewinnungsblock Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Sebastian Varga 19. Geokinematischer Tag
16 Forschungsfragen Wie kann die untertägige Situation charakterisiert werden? Mit welcher Sensorik /technischen Setup und welcher Sensorinformationen, kann der Erzgang unter Tage berührungslos und automatisiert klassifiziert werden? In welcher Auflösung und Genauigkeit können Erzgänge mit diesem Setup detektiert werden? Wie kann aus der qualitativen Aussage des Sensors eine quantitative Aussage gewonnen werden? Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Sebastian Varga 19. Geokinematischer Tag
 der Mineralien an der Ortsbrust Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.")
17 Motivation Herausforderungen Herausforderungen Dunkelheit Feuchte, Überbelichtung Unterschiedlicher Grad von Reflexion Inhomogenität der Kontur der Ortsbrust Unterschiedlicher Grad von Abschattung Ziele Definition des Messsystems Pixelweise Klassifikation (Auftrittswahrscheinlichkeit) der Mineralien an der Ortsbrust Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Sebastian Varga 19. Geokinematischer Tag

18 Technisches Setup Anforderungen Inhomogenität der Ortsbrust: Inhomogenität Illumination Entfernungen Unterschiedlicher Grad von Reflexionen Unterschiedlicher Grad von Abschattung 4 dimmbare Halogenlampen Automation des Weißabgleichs Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Sebastian Varga 19. Geokinematischer Tag

19 Multi-Sensor System für die geologische Kartierung Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Sebastian Varga 19. Geokinematischer Tag
![Hyperspektrales Messprinzip [4] Roboter und Internet der Dinge in untertägigen](/docs-images/92/110197184/images/20-2.jpg "Anlagen aridua.tu-freiberg.de Sebastian Varga 19. Geokinematischer Tag 2018 20")
20 Hyperspektrales Messprinzip [4] Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Sebastian Varga 19. Geokinematischer Tag
21 Konzept der automatisierten Klassifikation Ziel Blockweise Charakterisierung durch Verwendung der Gesamtheit der Pixelinformation Bestimmung der geologischen Grenze (Erz/taubes Gestein) Auftrittswahrscheinlichkeit einer Gesteinsklasse pro Pixel Herausforderungen Region/Pixel, die nicht korrekt klassifiziert sind Hyperspektrale Bildgebung als einzige Information ist problematisch Idee: Verwendung von nachbarschaftlichen Beziehungen (Räumliche Korelation) Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Sebastian Varga 19. Geokinematischer Tag



22 Workflow Datenanalyse MPS UP CL Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Sebastian Varga 19. Geokinematischer Tag



23 Multi-Point-Statistik - Workflow Kalibrierungsschritt : RGB-Bild wird von einer repräsentativen Region der Ortsbrust (geringer Grad an Abschattung/Reflexionen) erstellt Unüberwachte Klassifikation und manuelle Optimierung MPS-Simulation Input TI, korrekt klassifizierte Pixel als hard data Wahrscheinlichkeit pro Pixel Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Sebastian Varga 19. Geokinematischer Tag

24 Versuchssetup TU Bergakademie Freiberg, Institut für Markscheidewesen und Geodäsie Sebastian Varga, Tel.: +49 (0)3731 /


25 Versuchssetup TU Bergakademie Freiberg, Institut für Markscheidewesen und Geodäsie Sebastian Varga, Tel.: +49 (0)3731 /
26 Ausblick Aktueller Projektstand: Klassifikation mit MPS implementieren und anhand des Models zu validieren Messfahrzeug ist einsatzbereit Im nächsten Schritt Tests im Bergwerk: Tests Sensorik im Einsatz Tests unter Tage Setup Beleuchtung testen Roboter und Internet der Dinge in untertägigen Anlagen aridua.tu-freiberg.de Sebastian Varga 19. Geokinematischer Tag
 die")

27 Seit dem 1. Juli 2017 fördert der Freistaat Sachsen aus den Fördermitteln des Europäischen Sozialfonds (ESF) die Nachwuchsforschergruppe zum Thema Autonome Roboter und Internet der Dinge in untertägigen Anlagen unter der Leitung von Prof. Dr.-Ing. Helmut Mischo, Lehrstuhl für Rohstoffabbau und Spezialverfahren unter Tage an der TU Bergakademie Freiberg. Vielen Dank für Ihre Aufmerksamkeit Sprecher: M.Sc. Sebastian Varga
UPNS4D+: Selektive Gewinnung geringhaltiger Lagerstätten durch Untertagerobotik
 UPNS4D+: Selektive Gewinnung geringhaltiger Lagerstätten durch Untertagerobotik Dr. Matthias Rabel, indurad GmbH Koordinator: Dr. Reik Winkel, indurad GmbH Förderkennzeichen: 033R126A Verbundpartner XGraphic
UPNS4D+: Selektive Gewinnung geringhaltiger Lagerstätten durch Untertagerobotik Dr. Matthias Rabel, indurad GmbH Koordinator: Dr. Reik Winkel, indurad GmbH Förderkennzeichen: 033R126A Verbundpartner XGraphic
Roboter und Internet der Dinge zur Umgebungsdatenerfassung unter Tage
 der Versuche war. Die Durchführung eines weiteren Feldtestes ist demnach zwingend erforderlich. Fortführung der Arbeiten Der Prototyp des EIV-Bohrsystems befindet sich derzeit an der TU Dresden und wird
der Versuche war. Die Durchführung eines weiteren Feldtestes ist demnach zwingend erforderlich. Fortführung der Arbeiten Der Prototyp des EIV-Bohrsystems befindet sich derzeit an der TU Dresden und wird
Koordinator: Indurad GmbH Teilprojektleitung: Prof. Ingrid Scholl, Institut MASKOR Förderkennzeichen: 033R126(A-H)
") FKZ: 033R126(A-H) UPNS4D+: Untertägiges 4D+ Positionierungs-, Navigations- und Mapping-System zur hochselektiven, effizienten und im höchsten Maße sicheren Gewinnung wirtschaftsstrategischer Rohstoffe
FKZ: 033R126(A-H) UPNS4D+: Untertägiges 4D+ Positionierungs-, Navigations- und Mapping-System zur hochselektiven, effizienten und im höchsten Maße sicheren Gewinnung wirtschaftsstrategischer Rohstoffe
Koordinator: Indurad GmbH Teilprojektleitung: Prof. Ingrid Scholl, Institut MASKOR Förderkennzeichen: 033R126(A-H)
") FKZ: 033R126(A-H) UPNS4D+: Untertägiges 4D+ Positionierungs-, Navigations- und Mapping-System zur hochselektiven, effizienten und im höchsten Maße sicheren Gewinnung wirtschaftsstrategischer Rohstoffe
FKZ: 033R126(A-H) UPNS4D+: Untertägiges 4D+ Positionierungs-, Navigations- und Mapping-System zur hochselektiven, effizienten und im höchsten Maße sicheren Gewinnung wirtschaftsstrategischer Rohstoffe
Kartenerstellung und Navigation
 Kartenerstellung und Navigation zur Positionserkennung autonomer Fahrzeuge von Ilona Blanck 27. Mai 2008 im Rahmen der Anwendungen I Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik
Kartenerstellung und Navigation zur Positionserkennung autonomer Fahrzeuge von Ilona Blanck 27. Mai 2008 im Rahmen der Anwendungen I Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik
Quadrocopters and it s Applications: Overview of State of the Art Techniques
 : Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
: Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
Struktur der Missionssteuerung und Trajektorienplanung eines Schwarms autonom agierender Fluggeräte
 Struktur der Missionssteuerung und Trajektorienplanung eines Schwarms autonom agierender Fluggeräte J. Holsten, T. Ostermann, D. Moormann Institut für Flugsystemdynamik RWTH Aachen agierender Fluggeräte
Struktur der Missionssteuerung und Trajektorienplanung eines Schwarms autonom agierender Fluggeräte J. Holsten, T. Ostermann, D. Moormann Institut für Flugsystemdynamik RWTH Aachen agierender Fluggeräte
Entwicklung eines mobilen Roboters für die automatisierte Instandhaltung von Materialflusssystemen
 Entwicklung eines mobilen Roboters für die automatisierte Instandhaltung von Materialflusssystemen Von der Fakultät Maschinenbau der Technischen Universität Dortmund zur Erlangung des Grades eines Doktor-Ingenieurs
Entwicklung eines mobilen Roboters für die automatisierte Instandhaltung von Materialflusssystemen Von der Fakultät Maschinenbau der Technischen Universität Dortmund zur Erlangung des Grades eines Doktor-Ingenieurs
i-mass integriertes Maschinen Sensor System
 i-mass integriertes Maschinen Sensor System IMR Institut für Maschinen in der Rohstoffindustrie Dr.-Ing. Ralph Baltes Dortmund, Gliederung Vorstellung des IMR Motivation Projektvorstellung Anwendungsbeispiele
i-mass integriertes Maschinen Sensor System IMR Institut für Maschinen in der Rohstoffindustrie Dr.-Ing. Ralph Baltes Dortmund, Gliederung Vorstellung des IMR Motivation Projektvorstellung Anwendungsbeispiele
Interaktion mit ubiquitären Umgebungen
 Interaktion mit ubiquitären Umgebungen Mathias Walker 4. Juni 2002 Fachseminar Verteilte Systeme Betreuer: Michael Rohs Dozent: Prof. Dr. F. Mattern Inhalt Ubiquitäre Umgebung Technische Anforderungen
Interaktion mit ubiquitären Umgebungen Mathias Walker 4. Juni 2002 Fachseminar Verteilte Systeme Betreuer: Michael Rohs Dozent: Prof. Dr. F. Mattern Inhalt Ubiquitäre Umgebung Technische Anforderungen
Materialflusssystemen
 Seite 1 / 21 Topographieerfassung und Berechnung von Bewegungsbahnen für Instandhaltungseinheiten auf Materialflusssystemen Dipl.-Ing. Matthias Bücker Dipl.-Ing. Tobias Brutscheck Teilprojektleiter: Prof.
Seite 1 / 21 Topographieerfassung und Berechnung von Bewegungsbahnen für Instandhaltungseinheiten auf Materialflusssystemen Dipl.-Ing. Matthias Bücker Dipl.-Ing. Tobias Brutscheck Teilprojektleiter: Prof.
Teach-In für die 3D-Scan Akquise mit einem Roboter. Teach-In für die 3D-Scanakquise mit einem mobilen Roboter
 Teach-In für die 3D-Scan Akquise mit einem Roboter DoritStruckmeier, Borrmann Dorit Oldenburger 2017 Oliver Borrmann,3D-Tage Andreas Nüchter 1 Zielsetzung der Arbeit Ein mobiler Roboter fährt einen angelernten
Teach-In für die 3D-Scan Akquise mit einem Roboter DoritStruckmeier, Borrmann Dorit Oldenburger 2017 Oliver Borrmann,3D-Tage Andreas Nüchter 1 Zielsetzung der Arbeit Ein mobiler Roboter fährt einen angelernten
Wie Industrie 4.0 unser Leben umkrempelt Eine Einführung in die Begriffswelt
 Wie Industrie 4.0 unser Leben umkrempelt Eine Einführung in die Begriffswelt Prof. Dr. Jürg Luthiger Fachhochschule Nordwestschweiz Hochschule für Technik Institut für Mobile und Verteilte Systeme Zu meiner
Wie Industrie 4.0 unser Leben umkrempelt Eine Einführung in die Begriffswelt Prof. Dr. Jürg Luthiger Fachhochschule Nordwestschweiz Hochschule für Technik Institut für Mobile und Verteilte Systeme Zu meiner
INNERBETRIEBLICHEN. November 2016 Dr. Alexander Noack. Fraunhofer IPMS
 TRACK, TRACE & SENSE IN DER INNERBETRIEBLICHEN WERTSCHÖPFUNGSKETTE November 2016 Dr. Alexander Noack Agenda IPMS Wireless Microsystems Motivation Smarte RFID-Lösungen (Wenige) Grundlagen zu OPC-UA Die
TRACK, TRACE & SENSE IN DER INNERBETRIEBLICHEN WERTSCHÖPFUNGSKETTE November 2016 Dr. Alexander Noack Agenda IPMS Wireless Microsystems Motivation Smarte RFID-Lösungen (Wenige) Grundlagen zu OPC-UA Die
Probabilistische Methoden für die Roboter-Navigation am Beispiel eines autonomen Shopping- Assistenten. Von Christof Schröter
 Probabilistische Methoden für die Roboter-Navigation am Beispiel eines autonomen Shopping- Assistenten Von Christof Schröter Universitätsverlag Ilmenau 2009 Impressum Bibliografische Information der Deutschen
Probabilistische Methoden für die Roboter-Navigation am Beispiel eines autonomen Shopping- Assistenten Von Christof Schröter Universitätsverlag Ilmenau 2009 Impressum Bibliografische Information der Deutschen
Taktilsensorbasierte Steuerung von Roboterarmen zur Erstellung einer Haptischen Datenbank
 Taktilsensorbasierte Steuerung von Roboterarmen zur Erstellung einer Haptischen Datenbank Matthias Schöpfer 1 Gunther Heidemann 2 Helge Ritter 1 1 {mschoepf,helge}@techfak.uni-bielefeld.de Technische Fakultät
Taktilsensorbasierte Steuerung von Roboterarmen zur Erstellung einer Haptischen Datenbank Matthias Schöpfer 1 Gunther Heidemann 2 Helge Ritter 1 1 {mschoepf,helge}@techfak.uni-bielefeld.de Technische Fakultät
Digitalisierung im Lebenszyklus der Additiven Fertigung
 Digitalisierung im Lebenszyklus der Additiven Fertigung Fachgebiet Datenverarbeitung in der Konstruktion (DiK) Prof. Dr.-Ing. Reiner Anderl Cordula Auth, M.Sc. auth@dik.tu-darmstadt.de www.dik.tu-darmstadt.de
Digitalisierung im Lebenszyklus der Additiven Fertigung Fachgebiet Datenverarbeitung in der Konstruktion (DiK) Prof. Dr.-Ing. Reiner Anderl Cordula Auth, M.Sc. auth@dik.tu-darmstadt.de www.dik.tu-darmstadt.de
STUDIENGANG INFORMATIK IN DER FAKULTÄT TECHNIK (TI)
") STUDIENGANG INFORMATIK IN DER FAKULTÄT TECHNIK (TI) Informationstechnik (TIT) Mobile Informatik (TIM) IT Security (TIS) Stand: 07/2017 www.ravensburg.dhbw.de STUDIENGANG INFORMATIK Studienangebote Studiengang
STUDIENGANG INFORMATIK IN DER FAKULTÄT TECHNIK (TI) Informationstechnik (TIT) Mobile Informatik (TIM) IT Security (TIS) Stand: 07/2017 www.ravensburg.dhbw.de STUDIENGANG INFORMATIK Studienangebote Studiengang
Umsetzung eines Online-SLAM-Verfahrens auf der Roboterplattform VolksBot-Lab
 Umsetzung eines Online-SLAM-Verfahrens auf der Roboterplattform VolksBot-Lab Bachelorarbeit Frank Engelhardt Institut für Verteilte Systeme Gliederung Motivation Problemexposition Lösungsverfahren Zeitverhalten
Umsetzung eines Online-SLAM-Verfahrens auf der Roboterplattform VolksBot-Lab Bachelorarbeit Frank Engelhardt Institut für Verteilte Systeme Gliederung Motivation Problemexposition Lösungsverfahren Zeitverhalten
Heterogene Multirobotersysteme zur Aufklärung in unbekanntem Gelände
 Heterogene Multirobotersysteme zur Aufklärung in unbekanntem Gelände Zur Erlangung des akademischen Grades eines Doktor-Ingenieurs von der Fakultät für Elektrotechnik und Informationstechnik des Karlsruher
Heterogene Multirobotersysteme zur Aufklärung in unbekanntem Gelände Zur Erlangung des akademischen Grades eines Doktor-Ingenieurs von der Fakultät für Elektrotechnik und Informationstechnik des Karlsruher
Vorstellung der AI Studienprojekte (SoSe19)
") Vorstellung der AI Studienprojekte (SoSe19) 17.01.2019 Themenübersicht Projection-See-Through AR für Bauteiloberflächen (Projektnummer 13) 3- und 6-DOF Mobile VR mit Google Daydream (Projektnummer 14)
Vorstellung der AI Studienprojekte (SoSe19) 17.01.2019 Themenübersicht Projection-See-Through AR für Bauteiloberflächen (Projektnummer 13) 3- und 6-DOF Mobile VR mit Google Daydream (Projektnummer 14)
6. KIRAS Fachtagung 18. Oktober 2016, Wien. RelCon. Reliable Control of Semi-Autonomous Platforms
 6. KIRAS Fachtagung 18. Oktober 2016, Wien Reliable Control of Semi-Autonomous Platforms Verlässliche Führung semi-autonomer Fahrzeuge Förderprogramm: KIRAS Fördergeber: BMVIT / FFG Budget: Gesamt: ca.
6. KIRAS Fachtagung 18. Oktober 2016, Wien Reliable Control of Semi-Autonomous Platforms Verlässliche Führung semi-autonomer Fahrzeuge Förderprogramm: KIRAS Fördergeber: BMVIT / FFG Budget: Gesamt: ca.
Entwicklung eines Verfahrens zur berührungslosen Messung der Wasserfilmdicke auf Fahrbahnen
 Entwicklung eines Verfahrens zur berührungslosen Messung der Wasserfilmdicke auf Fahrbahnen Ein Beitrag zur Verkehrssicherheit Von der Fakultät Konstruktions- und Fertigungstechnik der Universität Stuttgart
Entwicklung eines Verfahrens zur berührungslosen Messung der Wasserfilmdicke auf Fahrbahnen Ein Beitrag zur Verkehrssicherheit Von der Fakultät Konstruktions- und Fertigungstechnik der Universität Stuttgart
Mobile Benutzerschnittstellen für die Interaktion mit Sensoren
 Mobile Benutzerschnittstellen für die Interaktion mit Sensoren Oliver Senn sennol@student.ethz.ch [Rauhala et. al. 2006] 28.04.2009 Sensornetze im Alltag Zunehmende Verbreitung von Sensornetzen Alltägliche
Mobile Benutzerschnittstellen für die Interaktion mit Sensoren Oliver Senn sennol@student.ethz.ch [Rauhala et. al. 2006] 28.04.2009 Sensornetze im Alltag Zunehmende Verbreitung von Sensornetzen Alltägliche
EFS Deep Learning für das Fahren der Zukunft. Anton Junker
 EFS Deep Learning für das Fahren der Zukunft Anton Junker Wer ist die EFS? Wer sind wir? Unternehmen Gründung 2009 Standort Ingolstadt/Wolfsburg Beteiligung GIGATRONIK Gruppe (51%) Audi Electronics Venture
EFS Deep Learning für das Fahren der Zukunft Anton Junker Wer ist die EFS? Wer sind wir? Unternehmen Gründung 2009 Standort Ingolstadt/Wolfsburg Beteiligung GIGATRONIK Gruppe (51%) Audi Electronics Venture
INDUSTRIEARBEITSKREIS
 FORSCHUNG & PRAXIS: INDUSTRIEARBEITSKREIS AM 2. OKTOBER 2013 IN DORTMUND WISSEN AUS DATEN GENERIEREN INDUSTRIELLE DATEN INTELLIGENT AUSWERTEN UND NUTZEN VORWORT Der Industriearbeitskreis (IAK) bietet interessierten
FORSCHUNG & PRAXIS: INDUSTRIEARBEITSKREIS AM 2. OKTOBER 2013 IN DORTMUND WISSEN AUS DATEN GENERIEREN INDUSTRIELLE DATEN INTELLIGENT AUSWERTEN UND NUTZEN VORWORT Der Industriearbeitskreis (IAK) bietet interessierten
Vertragsverifikation mittels Fernerkundung
 Vertragsverifikation mittels Fernerkundung Dr. Irmgard Niemeyer Arbeitsgruppe Geomonitoring Institut für Markscheidewesen und Geodäsie TU Bergakademie Freiberg Arbeitsgruppe Geomonitoring TU Bergakademie
Vertragsverifikation mittels Fernerkundung Dr. Irmgard Niemeyer Arbeitsgruppe Geomonitoring Institut für Markscheidewesen und Geodäsie TU Bergakademie Freiberg Arbeitsgruppe Geomonitoring TU Bergakademie
Out of the box: Flexible fahrerlose Transportfahrzeuge für den Mittelstand
 Institut für Integrierte Produktion Hannover Out of the box: Flexible fahrerlose Transportfahrzeuge für den Mittelstand Dr. Björn Eilert, IPH - Institut für Integrierte Produktion ggmbh BVL-Forum Solution
Institut für Integrierte Produktion Hannover Out of the box: Flexible fahrerlose Transportfahrzeuge für den Mittelstand Dr. Björn Eilert, IPH - Institut für Integrierte Produktion ggmbh BVL-Forum Solution
ANWENDUNGSSZENARIEN UND REFERENZARCHITEKTUR IN DER INDUSTRIE 4.0 ESK
 ANWENDUNGSSZENARIEN UND REFERENZARCHITEKTUR IN DER INDUSTRIE 4.0 ESK IT2Industry, München, 11. November 2015 Fraunhofer-Institut für Eingebettete Systeme und Kommunikationstechnik ESK Prof. Dr.-Ing. Rudi
ANWENDUNGSSZENARIEN UND REFERENZARCHITEKTUR IN DER INDUSTRIE 4.0 ESK IT2Industry, München, 11. November 2015 Fraunhofer-Institut für Eingebettete Systeme und Kommunikationstechnik ESK Prof. Dr.-Ing. Rudi
Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren.
 Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren www.joanneum.at/digital Wozu braucht mein Auto eine Karte? 2 Mensch als Fahrer: Karte wird zum Navigieren
Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren www.joanneum.at/digital Wozu braucht mein Auto eine Karte? 2 Mensch als Fahrer: Karte wird zum Navigieren
DMT Pilot 3D Mobile Mapping mit dem DMT Pilot 3D unter Tage M.Sc. Daniel Schröder
 Mobile Mapping mit dem unter Tage M.Sc. Daniel Schröder Idee 3-in-1 System zur präzisen Positions- und Lagebestimmung, Navigation und 3D-Dokumentation Technologie des DLR für die autonome Navigation eines
Mobile Mapping mit dem unter Tage M.Sc. Daniel Schröder Idee 3-in-1 System zur präzisen Positions- und Lagebestimmung, Navigation und 3D-Dokumentation Technologie des DLR für die autonome Navigation eines
Bahnplanung am stationären Hindernis
 Bahnplanung am stationären Hindernis von Ilona Blanck 01. Dez 2008 im Rahmen der Seminar Ring Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik der HAW Hamburg Übersicht 1. Motivation
Bahnplanung am stationären Hindernis von Ilona Blanck 01. Dez 2008 im Rahmen der Seminar Ring Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik der HAW Hamburg Übersicht 1. Motivation
Engineering und Betrieb Smarter Komponenten in IoT-Netzwerken für die Automatisierung der Produktion
 Institut für Automatisierungstechnik und Softwaresysteme Engineering und Betrieb Smarter Komponenten in IoT-Netzwerken für die Automatisierung der Produktion Prof. Dr.-Ing. Michael Weyrich IOT-Kongress
Institut für Automatisierungstechnik und Softwaresysteme Engineering und Betrieb Smarter Komponenten in IoT-Netzwerken für die Automatisierung der Produktion Prof. Dr.-Ing. Michael Weyrich IOT-Kongress
Modellierung verteilter Systeme Grundlagen der Programm und Systementwicklung
 Modellierung verteilter Systeme Grundlagen der Programm und Systementwicklung Sommersemester 2012 Prof. Dr. Dr. h.c. Manfred Broy Unter Mitarbeit von Dr. M. Spichkova, J. Mund, P. Neubeck Lehrstuhl Software
Modellierung verteilter Systeme Grundlagen der Programm und Systementwicklung Sommersemester 2012 Prof. Dr. Dr. h.c. Manfred Broy Unter Mitarbeit von Dr. M. Spichkova, J. Mund, P. Neubeck Lehrstuhl Software
DISSERTATION. Nichtlineare Analyse und Klassifikation von instationären Biosignalen mit Anwendung in der Kognitionsforschung
 Technische Universität Ilmenau DISSERTATION Nichtlineare Analyse und Klassifikation von instationären Biosignalen mit Anwendung in der Kognitionsforschung zur Erlangung des akademischen Grades Doktor-Ingenieur
Technische Universität Ilmenau DISSERTATION Nichtlineare Analyse und Klassifikation von instationären Biosignalen mit Anwendung in der Kognitionsforschung zur Erlangung des akademischen Grades Doktor-Ingenieur
Session: 9C Transferprojekt: itsowl-tt-revils Ressourceneffiziente Vernetzung von interaktiven Lichtsystemen
 Session: 9C Transferprojekt: itsowl-tt-revils Ressourceneffiziente Vernetzung von interaktiven Lichtsystemen Halemeier GmbH 11. Oktober 2017 Lemgo www.its-owl.de Agenda Abschlusspräsentation Einführung
Session: 9C Transferprojekt: itsowl-tt-revils Ressourceneffiziente Vernetzung von interaktiven Lichtsystemen Halemeier GmbH 11. Oktober 2017 Lemgo www.its-owl.de Agenda Abschlusspräsentation Einführung
Systeme I: Betriebssysteme. Willkommen. Wolfram Burgard Alexander Schiotka, Andreas Wachaja, Henrich Kolkhorst
 Systeme I: Betriebssysteme Willkommen Wolfram Burgard Alexander Schiotka, Andreas Wachaja, Henrich Kolkhorst 1 Veranstalter Dozent Prof. Dr. Wolfram Burgard Gebäude 080 Sprechstunde: nach Vereinbarung
Systeme I: Betriebssysteme Willkommen Wolfram Burgard Alexander Schiotka, Andreas Wachaja, Henrich Kolkhorst 1 Veranstalter Dozent Prof. Dr. Wolfram Burgard Gebäude 080 Sprechstunde: nach Vereinbarung
RatSLAM. Torben Becker. 24. Mai HAW Hamburg
 HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
Systeme I: Betriebssysteme. Willkommen. Wolfram Burgard Henrich Kolkhorst, Johannes Meyer Andreas Wachaja
 Systeme I: Betriebssysteme Willkommen Wolfram Burgard Henrich Kolkhorst, Johannes Meyer Andreas Wachaja 1 Veranstalter Dozent Prof. Dr. Wolfram Burgard Gebäude 080 Sprechstunde: nach Vereinbarung burgard@informatik.uni-freiburg.de
Systeme I: Betriebssysteme Willkommen Wolfram Burgard Henrich Kolkhorst, Johannes Meyer Andreas Wachaja 1 Veranstalter Dozent Prof. Dr. Wolfram Burgard Gebäude 080 Sprechstunde: nach Vereinbarung burgard@informatik.uni-freiburg.de
XI. Forschungs- und Technologieforum. Industrie 4.0. Notwendiges Übel für technologieorintierte KMU? Schmitz Cargobull Gotha GmbH,
 XI. Forschungs- und Technologieforum Industrie 4.0 Notwendiges Übel für technologieorintierte KMU? Olaf Mollenhauer Schmitz Cargobull Gotha GmbH, 08.05.2014, Headlines CPS als Basis für Industrie 4.0 Geschäftsfelder
XI. Forschungs- und Technologieforum Industrie 4.0 Notwendiges Übel für technologieorintierte KMU? Olaf Mollenhauer Schmitz Cargobull Gotha GmbH, 08.05.2014, Headlines CPS als Basis für Industrie 4.0 Geschäftsfelder
Modell zur Einflussanalyse Ein Modell zur Einflussanalyse von Methodenänderungen in Entwicklungsprozessen
 Modell zur Einflussanalyse Ein Modell zur Einflussanalyse von Methodenänderungen in Entwicklungsprozessen Roland Koppe, Stefan Häusler, Axel Hahn 2 Übersicht Einleitung und Motivation Ansatz und Methodik
Modell zur Einflussanalyse Ein Modell zur Einflussanalyse von Methodenänderungen in Entwicklungsprozessen Roland Koppe, Stefan Häusler, Axel Hahn 2 Übersicht Einleitung und Motivation Ansatz und Methodik
Einsatz eines Online-Angebots zur Internationalisierung der Hochschullehre im Bereich Robotik
 Fakultät für Elektrotechnik, Informatik und Mathematik Institut für Elektrotechnik und Informationstechnik Einsatz eines Online-Angebots zur Internationalisierung der Hochschullehre im Bereich Robotik
Fakultät für Elektrotechnik, Informatik und Mathematik Institut für Elektrotechnik und Informationstechnik Einsatz eines Online-Angebots zur Internationalisierung der Hochschullehre im Bereich Robotik
ECHTZEITINFORMATIONEN IN SICHERHEITSKRITISCHEN GIS- ANWENDUNGEN
 ECHTZEITINFORMATIONEN IN SICHERHEITSKRITISCHEN GIS- ANWENDUNGEN Hagen Borstell Olaf Poenicke Prof. Klaus Richter Fraunhofer-Institut für Fabrikbetrieb und -automatisierung IFF Rostock, 16. April 2013 INHALT
ECHTZEITINFORMATIONEN IN SICHERHEITSKRITISCHEN GIS- ANWENDUNGEN Hagen Borstell Olaf Poenicke Prof. Klaus Richter Fraunhofer-Institut für Fabrikbetrieb und -automatisierung IFF Rostock, 16. April 2013 INHALT
Roman Herrmann, M. Sc. Dipl.-Inf. Jens Hegenberg Daniela Ziegner, M. Sc. Univ.-Prof. Dr.-Ing. Ludger Schmidt
 Mensch-Roboter-Interaktion in einem Boden-Luft-Servicerobotiksystem für die Inspektion industrieller Druckluftversorgung und Verbesserung von Arbeitsumgebungsfaktoren Roman Herrmann, M. Sc. Dipl.-Inf.
Mensch-Roboter-Interaktion in einem Boden-Luft-Servicerobotiksystem für die Inspektion industrieller Druckluftversorgung und Verbesserung von Arbeitsumgebungsfaktoren Roman Herrmann, M. Sc. Dipl.-Inf.
Lichtsteuerungen in der Außenbeleuchtung heute - morgen. Benjamin Berger Philips, Lighting Solution Center
 Lichtsteuerungen in der Außenbeleuchtung heute - morgen Benjamin Berger Philips, Lighting Solution Center 26.11.2014 Wer steht vor Ihnen? Benjamin Berger Applikationsingenieur Zuständig für - Inbetriebnahmen
Lichtsteuerungen in der Außenbeleuchtung heute - morgen Benjamin Berger Philips, Lighting Solution Center 26.11.2014 Wer steht vor Ihnen? Benjamin Berger Applikationsingenieur Zuständig für - Inbetriebnahmen
VON DER KAMERAKALIBRIERUNG ZUM AUTOMATISIERTEN FAHREN BEATRICE APPENZELLER
 VON DER KAMERAKALIBRIERUNG ZUM AUTOMATISIERTEN FAHREN BEATRICE APPENZELLER Zu meiner Person Beatrice Appenzeller (geb. 1986), wohnhaft in Stuttgart Diplom-Ingenieurin der Geodäsie und Geoinformatik seit
VON DER KAMERAKALIBRIERUNG ZUM AUTOMATISIERTEN FAHREN BEATRICE APPENZELLER Zu meiner Person Beatrice Appenzeller (geb. 1986), wohnhaft in Stuttgart Diplom-Ingenieurin der Geodäsie und Geoinformatik seit
Exploring Mobility.
 Exploring Mobility »Möglichkeiten für Location- Based Services in komplexen Strukturen und Umgebungen am Beispiel Bluetooth Low Energy «ecom instruments GmbH Dietmar Deppisch Product Manager System Solutions
Exploring Mobility »Möglichkeiten für Location- Based Services in komplexen Strukturen und Umgebungen am Beispiel Bluetooth Low Energy «ecom instruments GmbH Dietmar Deppisch Product Manager System Solutions
Projektgruppe DynOLog. Informatik 7 & 12 sowie IRPA und IML Frank Weichert. Pascal Libuschewski. Adrian Schyja. Andreas Kamagaew
 Projektgruppe DynOLog Dynamische Detektion von Objekten im Kontext von logistischen Anwendungsfällen Informatik 7 & 12 sowie IRPA und IML Frank Weichert Email: frank.weichert@tu-dortmund.de Pascal Libuschewski
Projektgruppe DynOLog Dynamische Detektion von Objekten im Kontext von logistischen Anwendungsfällen Informatik 7 & 12 sowie IRPA und IML Frank Weichert Email: frank.weichert@tu-dortmund.de Pascal Libuschewski
System und Verfahren zur cloudbasierten Betriebsoptimierung von Nichtwohngebäuden
 System und Verfahren zur cloudbasierten Betriebsoptimierung von Nichtwohngebäuden Erik Brümmendorf, M.Sc. Dr.-Ing. Dipl.-Wirt.-Ing. Johannes Fütterer Prof. Dr.-Ing. Dirk Müller RWTH Aachen, E.ON Energieforschungszentrum,
System und Verfahren zur cloudbasierten Betriebsoptimierung von Nichtwohngebäuden Erik Brümmendorf, M.Sc. Dr.-Ing. Dipl.-Wirt.-Ing. Johannes Fütterer Prof. Dr.-Ing. Dirk Müller RWTH Aachen, E.ON Energieforschungszentrum,
HAW Hamburg Anwendung 1 - Vortrag Andrej Rull
 HAW Hamburg Anwendung 1 - Vortrag Andrej Rull 02122008 1 Gliederung o Motivation o Der Anwendungsfall o Das SLAM Problem o Lösungsansätze und Algorithmen o Zusammenfassung o Ausblick auf AW2 2 Motivation
HAW Hamburg Anwendung 1 - Vortrag Andrej Rull 02122008 1 Gliederung o Motivation o Der Anwendungsfall o Das SLAM Problem o Lösungsansätze und Algorithmen o Zusammenfassung o Ausblick auf AW2 2 Motivation
Future Network-based Semantic Technologies FUNSET Science
 AUTOMATION & CONTROL INSTITUTE INSTITUT FÜR AUTOMATISIERUNGS- & REGELUNGSTECHNIK Future Network-based Semantic Technologies FUNSET Science Munir Merdan und Reinhard Grabler Sparkling Science Kongress Workshop
AUTOMATION & CONTROL INSTITUTE INSTITUT FÜR AUTOMATISIERUNGS- & REGELUNGSTECHNIK Future Network-based Semantic Technologies FUNSET Science Munir Merdan und Reinhard Grabler Sparkling Science Kongress Workshop
HIL basierte Kalibrierung anhand des HAWKS Rennwagens. Referent: Daniel Lorenz
 HIL basierte Kalibrierung anhand des HAWKS Rennwagens Agenda Einführung Simulationen & X-in-the-loop HAWKS Rennwagen Anforderungen Test-Aufbau Ausblick und mögliche Risiken Fragen und Antworten 2 Einführung
HIL basierte Kalibrierung anhand des HAWKS Rennwagens Agenda Einführung Simulationen & X-in-the-loop HAWKS Rennwagen Anforderungen Test-Aufbau Ausblick und mögliche Risiken Fragen und Antworten 2 Einführung
Service-Robotik Herausforderungen und Trends. Prof. Dr. Frank Kirchner Universität Bremen, DFKI Robotik Labor Bremen Robert-Hooke-Str.
 Service-Robotik Herausforderungen und Trends Prof. Dr. Frank Kirchner Universität Bremen, DFKI Robotik Labor Bremen Robert-Hooke-Str. 5 28359 Bremen , Bremen Grundlagen zur Anwendung bringen Direkte Einbindung
Service-Robotik Herausforderungen und Trends Prof. Dr. Frank Kirchner Universität Bremen, DFKI Robotik Labor Bremen Robert-Hooke-Str. 5 28359 Bremen , Bremen Grundlagen zur Anwendung bringen Direkte Einbindung
Entwicklung eines fächerartigen Distanzmesssystems zur Messung von Rotorblättern. Konzept, Orientierung und erste Ergebnisse
 Entwicklung eines fächerartigen Distanzmesssystems zur Messung von Rotorblättern Konzept, Orientierung und erste Ergebnisse Martina Göring M.Sc. & Prof. Dr. Thomas Luhmann AUFGABENSTELLUNG Entwicklung
Entwicklung eines fächerartigen Distanzmesssystems zur Messung von Rotorblättern Konzept, Orientierung und erste Ergebnisse Martina Göring M.Sc. & Prof. Dr. Thomas Luhmann AUFGABENSTELLUNG Entwicklung
FÖRDERMODELL 3.000,- QUALIFIZIERUNGSFÖRDERUNG BEWERBSFÖRDERUNG. Metalltechnische Industrie NÖ. für Ihren Erfolg. wko.at/noe/mti/foerdermodell
 FÖRDERMODELL 2019 Metalltechnische Industrie NÖ 3.000,- für Ihren Erfolg QUALIFIZIERUNGSFÖRDERUNG BEWERBSFÖRDERUNG wko.at/noe/mti/foerdermodell 2 WER WIRD GEFÖRDERT? Mitglieder der Fachgruppe Metalltechnische
FÖRDERMODELL 2019 Metalltechnische Industrie NÖ 3.000,- für Ihren Erfolg QUALIFIZIERUNGSFÖRDERUNG BEWERBSFÖRDERUNG wko.at/noe/mti/foerdermodell 2 WER WIRD GEFÖRDERT? Mitglieder der Fachgruppe Metalltechnische
Autonomes Fahren Landwirtschaft 4.0?
 Fakultät Maschinenwesen Institut für Naturstofftechnik Autonomes Fahren Landwirtschaft 4.0? Prof. Thomas Herlitzius, Lehrstuhl Agrarsystemtechnik 500 Jahre Lommatzscher Pflege wo Werte wachsen Lommatzsch
Fakultät Maschinenwesen Institut für Naturstofftechnik Autonomes Fahren Landwirtschaft 4.0? Prof. Thomas Herlitzius, Lehrstuhl Agrarsystemtechnik 500 Jahre Lommatzscher Pflege wo Werte wachsen Lommatzsch
Vorstellung und Aufgaben des Projektpartners 4 Sächsisches Landesamt für Umwelt, Landwirtschaft und Geologie (LfULG)
") Vorstellung und Aufgaben des Projektpartners 4 Sächsisches Landesamt für Umwelt, Landwirtschaft und Geologie (LfULG) - Eröffnungskonferenz - Jan-Evangelista-Purkyně-Universität Pasteurova 3544/1, 400 96
Vorstellung und Aufgaben des Projektpartners 4 Sächsisches Landesamt für Umwelt, Landwirtschaft und Geologie (LfULG) - Eröffnungskonferenz - Jan-Evangelista-Purkyně-Universität Pasteurova 3544/1, 400 96
Informatik Einführung in das ROS Robot Operating System
 Informatik Einführung in das ROS Robot Operating System Robotik / AMR / Sensorik Jan Bühler Mannheim, 17.10.2011 Hochschule Mannheim University of Applied Sciences Inhalt 1.Aufgaben des ROS Robot Operating
Informatik Einführung in das ROS Robot Operating System Robotik / AMR / Sensorik Jan Bühler Mannheim, 17.10.2011 Hochschule Mannheim University of Applied Sciences Inhalt 1.Aufgaben des ROS Robot Operating
Arbeit der Zukunft. Neues Arbeiten für die Zukunft Dr. Andreas Bihlmaier Arbeit der Zukunft
 Arbeit der Zukunft Neues Arbeiten für die Zukunft Arbeit der Zukunft: Viele Fragen Gibt es überhaupt noch Arbeit? Gibt es überhaupt noch Arbeitende? Fühlt sich Arbeiten überhaupt noch nach Arbeit an? Und
Arbeit der Zukunft Neues Arbeiten für die Zukunft Arbeit der Zukunft: Viele Fragen Gibt es überhaupt noch Arbeit? Gibt es überhaupt noch Arbeitende? Fühlt sich Arbeiten überhaupt noch nach Arbeit an? Und
21. Jahrhundert. AG Meerestechnik. Prof. Dr. Ing. Günther F. Clauss, TU Berlin Dipl. Oz. Petra Mahnke, GMT
 Meerestechnik Inhalte und Ziele des Programms undmeerestechnik für das 21. Jahrhundert AG Meerestechnik Prof. Dr. Ing. Günther F. Clauss, TU Berlin Dipl. Oz. Petra Mahnke, GMT 21. Oktober 2010 1/35 Mitglieder
Meerestechnik Inhalte und Ziele des Programms undmeerestechnik für das 21. Jahrhundert AG Meerestechnik Prof. Dr. Ing. Günther F. Clauss, TU Berlin Dipl. Oz. Petra Mahnke, GMT 21. Oktober 2010 1/35 Mitglieder
Praktischer Nutzen und Potenziale von Punktwolken für kommunale Anwendungen. Rico Richter 8. Oktober 2016 Workshop 3D-Stadtmodelle
 Praktischer Nutzen und Potenziale von Punktwolken für kommunale Anwendungen Rico Richter 8. Oktober 2016 Workshop 3D-Stadtmodelle Hintergrund Hasso-Plattner-Institut (HPI): Fachgebiet Computergrafische
Praktischer Nutzen und Potenziale von Punktwolken für kommunale Anwendungen Rico Richter 8. Oktober 2016 Workshop 3D-Stadtmodelle Hintergrund Hasso-Plattner-Institut (HPI): Fachgebiet Computergrafische
Indoor Positionierungs-Technologien
 Indoor Positionierungs-Technologien Corina Kim Schindhelm Siemens 4. Deutscher AAL Kongress, 26. Januar 2011 Selbstständig, sicher, gesund und mobil im Alter. Smart Senior Zu Hause TV als zentrales Diensteportal
Indoor Positionierungs-Technologien Corina Kim Schindhelm Siemens 4. Deutscher AAL Kongress, 26. Januar 2011 Selbstständig, sicher, gesund und mobil im Alter. Smart Senior Zu Hause TV als zentrales Diensteportal
Chancen für den Produktentwicklungsprozess Simulation auf Clustern und HPC-Systemen
 Chancen für den Produktentwicklungsprozess Simulation auf Clustern und HPC-Systemen - Inhalt 1. ISKO engineers AG 2. Simulation als Teil des PEP 3. Simulation und (HP)Cluster 4. Zusammenfassung 2 ISKO
Chancen für den Produktentwicklungsprozess Simulation auf Clustern und HPC-Systemen - Inhalt 1. ISKO engineers AG 2. Simulation als Teil des PEP 3. Simulation und (HP)Cluster 4. Zusammenfassung 2 ISKO
Trends der Geografischen Informationswissenschaft
 Trends der Geografischen Informationswissenschaft Prof. Dr. Martin Raubal Institut für Kartografie und Geoinformation mraubal@ethz.ch [25 Jahre CAS RIS/GIS, ETH Hönggerberg] 10.02.2017 1 https://www.gislounge.com/gis-timeline/
Trends der Geografischen Informationswissenschaft Prof. Dr. Martin Raubal Institut für Kartografie und Geoinformation mraubal@ethz.ch [25 Jahre CAS RIS/GIS, ETH Hönggerberg] 10.02.2017 1 https://www.gislounge.com/gis-timeline/
DER GLÄSERNE KUNDE LOKALISATION MIT RFID. Dr. Dietmar Bräuer
 DER GLÄSERNE KUNDE LOKALISATION MIT RFID Dr. Dietmar Bräuer - 2017 AGENDA Ausgangslage Methoden der Lokalisation Technische Umsetzung Herausforderungen Grenzen der Lokalisation Gefahren WELCHE STANDORTDIENSTE
DER GLÄSERNE KUNDE LOKALISATION MIT RFID Dr. Dietmar Bräuer - 2017 AGENDA Ausgangslage Methoden der Lokalisation Technische Umsetzung Herausforderungen Grenzen der Lokalisation Gefahren WELCHE STANDORTDIENSTE
Dokumentation. Bestandsaufnahmen. Vorteile. und. Bestandsdokumentationen mit neuen Techniken
 und Dokumentation Bestandsaufnahmen Vorteile Bestandsdokumentationen mit neuen Techniken Überkopfwegweiser, Brückeninspektionen, Fahrbahnkontrolle, Inspektionen von Stützmauern, Kontrolle von Sicherungsmaßnahmen,
und Dokumentation Bestandsaufnahmen Vorteile Bestandsdokumentationen mit neuen Techniken Überkopfwegweiser, Brückeninspektionen, Fahrbahnkontrolle, Inspektionen von Stützmauern, Kontrolle von Sicherungsmaßnahmen,
Sichere Roboterapplikationen in der Automatisierungstechnik Yaskawa Expertenforum 24.Okt. 2013
 Sichere Roboterapplikationen in der Automatisierungstechnik Yaskawa Expertenforum 24.Okt. 2013 Dipl.-Ing. (FH) Jochen Vetter Customer Support Consulting und Service Referenten Dipl.-Ing. (FH) Jochen Vetter
Sichere Roboterapplikationen in der Automatisierungstechnik Yaskawa Expertenforum 24.Okt. 2013 Dipl.-Ing. (FH) Jochen Vetter Customer Support Consulting und Service Referenten Dipl.-Ing. (FH) Jochen Vetter
GIS-basierte topologische Fahrzeuglokalisierung durch LIDAR Kreuzungserkennung
 durch LIDAR Kreuzungserkennung André Müller, Hans-Joachim Wünsche Fakultät für Luft- und Raumfahrttechnik Institut für Technik Autonomer Systeme (TAS) Universität der Bundeswehr München Inhalt - Einleitung
durch LIDAR Kreuzungserkennung André Müller, Hans-Joachim Wünsche Fakultät für Luft- und Raumfahrttechnik Institut für Technik Autonomer Systeme (TAS) Universität der Bundeswehr München Inhalt - Einleitung
AICON 3D Arena Optische Trackingtechnologie für große Messvolumina. Kurt Sinnreich
 AICON 3D Arena Optische Trackingtechnologie für große Messvolumina Kurt Sinnreich Vorsprung ist messbar Eine effiziente und hochgenaue Produktionsüberwachung, Qualitätssicherung und -kontrolle sowie zuverlässiges
AICON 3D Arena Optische Trackingtechnologie für große Messvolumina Kurt Sinnreich Vorsprung ist messbar Eine effiziente und hochgenaue Produktionsüberwachung, Qualitätssicherung und -kontrolle sowie zuverlässiges
Potentiale der Low-Cost- und Low-Tech-Bilderfassung. Workshop Reverse Engineering, 22. November 2017 Matthias Blankenburg
 Potentiale der Low-Cost- und Low-Tech-Bilderfassung Workshop Reverse Engineering, 22. November 2017 Matthias Blankenburg Fraunhofer-Institut für Produktionsanlagen und Konstruktionstechnik Fraunhofer IPK
Potentiale der Low-Cost- und Low-Tech-Bilderfassung Workshop Reverse Engineering, 22. November 2017 Matthias Blankenburg Fraunhofer-Institut für Produktionsanlagen und Konstruktionstechnik Fraunhofer IPK
Vom virtuellen Prototyp zum digitalen Zwilling
 Vom virtuellen Prototyp zum digitalen Zwilling Dr. Markus Schörgenhumer Area Mechanics and Control markus.schoergenhumer@lcm.at Seite 1 Inhaltsüberblick Einführung Modellbasierte Entwicklung und virtuelle
Vom virtuellen Prototyp zum digitalen Zwilling Dr. Markus Schörgenhumer Area Mechanics and Control markus.schoergenhumer@lcm.at Seite 1 Inhaltsüberblick Einführung Modellbasierte Entwicklung und virtuelle
Aktuelle Entwicklungen der Robotik und Automatisierung im Gewächshaus
 Aktuelle Entwicklungen der Robotik und Automatisierung im Gewächshaus Jochen Hemming Agro Food Robotics / Greenhouse Horticulture Wageningen University & Research Niederlande KTBL, 17 September 2018 Inhalt
Aktuelle Entwicklungen der Robotik und Automatisierung im Gewächshaus Jochen Hemming Agro Food Robotics / Greenhouse Horticulture Wageningen University & Research Niederlande KTBL, 17 September 2018 Inhalt
Einführung: Was ist AR?
 Einführung: Was ist AR? Vorlesung Augmented Reality Prof. Dr. Andreas Butz, Martin Wagner 15.04.2005 LMU München Medieninformatik Butz/Wagner Vorlesung Augmented Reality SS2005 13.04.2005 Folie 1 Organisatorisches
Einführung: Was ist AR? Vorlesung Augmented Reality Prof. Dr. Andreas Butz, Martin Wagner 15.04.2005 LMU München Medieninformatik Butz/Wagner Vorlesung Augmented Reality SS2005 13.04.2005 Folie 1 Organisatorisches
LiDAR Mobile Mapping
 Institut für Kartographie und Geoinformatik Leibniz Universität Hannover LiDAR Mobile Mapping Visualisierung, Vermessung, Fahrerassistenz Claus.Brenner@ikg.uni-hannover.de IKG Erfassungsfahrzeug Riegl
Institut für Kartographie und Geoinformatik Leibniz Universität Hannover LiDAR Mobile Mapping Visualisierung, Vermessung, Fahrerassistenz Claus.Brenner@ikg.uni-hannover.de IKG Erfassungsfahrzeug Riegl
Enterprise 4.0 Upper Austria. Ein Projekt zur Steigerung der Wettbewerbsfähigkeit von Unternehmen im Kontext der Digitalisierung
 Enterprise 4.0 Upper Austria Ein Projekt zur Steigerung der Wettbewerbsfähigkeit von Unternehmen im Kontext der Digitalisierung Enterprise 4.0 das Erfolgsformat Leitfrage PARTNER Wie kann die digitale
Enterprise 4.0 Upper Austria Ein Projekt zur Steigerung der Wettbewerbsfähigkeit von Unternehmen im Kontext der Digitalisierung Enterprise 4.0 das Erfolgsformat Leitfrage PARTNER Wie kann die digitale
Proposal Masterarbeit
 Proposal Masterarbeit Martin Zenzes 9. Oktober 2009 Erstprüfer: Frank Kirchner Betreuer: Sebastian Bartsch Forschunggruppe Robotik DFKI Bremen Robert-Hooke-Str. 5 28359 Bremen Inhaltsverzeichnis Thema
Proposal Masterarbeit Martin Zenzes 9. Oktober 2009 Erstprüfer: Frank Kirchner Betreuer: Sebastian Bartsch Forschunggruppe Robotik DFKI Bremen Robert-Hooke-Str. 5 28359 Bremen Inhaltsverzeichnis Thema
Legen Sie Wert auf Zeitersparnis, Qualitätsverbesserung und Flexibilität? Dann sind wir Ihr Partner!
 Legen Sie Wert auf Zeitersparnis, Qualitätsverbesserung und Flexibilität? Dann sind wir Ihr Partner! RESEARCH WIR ENTWICKELN TECHNOLOGIE FÜR DIE ZUKUNFT. Wir sind Partner für Forschung und Entwicklung.
Legen Sie Wert auf Zeitersparnis, Qualitätsverbesserung und Flexibilität? Dann sind wir Ihr Partner! RESEARCH WIR ENTWICKELN TECHNOLOGIE FÜR DIE ZUKUNFT. Wir sind Partner für Forschung und Entwicklung.
Universelles integriertes geophysikalisches Mess- und Auswerteinstrumentarium zur Charakterisierung von Problemzonen im Salinar
 Universelles integriertes geophysikalisches Mess- und Auswerteinstrumentarium zur Charakterisierung von Problemzonen im Salinar Uni Leipzig, Institut für Geophysik und Geologie Projektkoordination Geoelektrik
Universelles integriertes geophysikalisches Mess- und Auswerteinstrumentarium zur Charakterisierung von Problemzonen im Salinar Uni Leipzig, Institut für Geophysik und Geologie Projektkoordination Geoelektrik
Implementierung des Scan-Matching-Algorithmus MbICP im Fach Mensch-Maschine- Kommunikation/Robotik
 Implementierung des Scan-Matching-Algorithmus MbICP im Fach Mensch-Maschine- Kommunikation/Robotik Betreuer: Dipl.-Inf. (FH) Peter Poschmann Enrico Uhlig, Markus Fischer, Marcus Kupke 26. Jun 2012 1 Gliederung
Implementierung des Scan-Matching-Algorithmus MbICP im Fach Mensch-Maschine- Kommunikation/Robotik Betreuer: Dipl.-Inf. (FH) Peter Poschmann Enrico Uhlig, Markus Fischer, Marcus Kupke 26. Jun 2012 1 Gliederung
Legen Sie Wert auf Zeitersparnis, Qualitätsverbesserung und Flexibilität? Dann sind wir Ihr Partner!
 Legen Sie Wert auf Zeitersparnis, Qualitätsverbesserung und Flexibilität? Dann sind wir Ihr Partner! DESIGN BUILD OPTIMIZE WIR ENTWICKELN TECHNOLOGIE FÜR DIE ZUKUNFT. Wir sind Partner für Forschung und
Legen Sie Wert auf Zeitersparnis, Qualitätsverbesserung und Flexibilität? Dann sind wir Ihr Partner! DESIGN BUILD OPTIMIZE WIR ENTWICKELN TECHNOLOGIE FÜR DIE ZUKUNFT. Wir sind Partner für Forschung und
FLEXIBLE UND GETEILTE RESSOURCENNUTZUNG SHARING ALS KATALYSATOR FÜR DEN WANDEL
 FLEXIBLE UND GETEILTE RESSOURCENNUTZUNG SHARING ALS KATALYSATOR FÜR DEN WANDEL Auftaktveranstaltung»Business Innovation Engineering Center«Stuttgart, 19.10.2018 Seite 1 HIGHLIGHTS AUS DEN WORKSHOPS Flexibler
FLEXIBLE UND GETEILTE RESSOURCENNUTZUNG SHARING ALS KATALYSATOR FÜR DEN WANDEL Auftaktveranstaltung»Business Innovation Engineering Center«Stuttgart, 19.10.2018 Seite 1 HIGHLIGHTS AUS DEN WORKSHOPS Flexibler
Prozesse im Wandel Auswirkungen von Industrie 4.0 auf Produktionsbetriebe
 Prozesse im Wandel Auswirkungen von Industrie 4.0 auf Produktionsbetriebe Wien, 08. November 2017 Institut für Produktionsmanagement und Logistik ( I P L ) Prof. Dr. Klaus-Jürgen Meier www.i-p-l.de Prof.
Prozesse im Wandel Auswirkungen von Industrie 4.0 auf Produktionsbetriebe Wien, 08. November 2017 Institut für Produktionsmanagement und Logistik ( I P L ) Prof. Dr. Klaus-Jürgen Meier www.i-p-l.de Prof.
Session: 1A Intelligente Steuerung von Prozessschritten in der Fertigung von reaktiven Schmelzklebstoffen (Jowat) 10. Oktober 2017 Lemgo
 10. Oktober 2017 Lemgo") Session: 1A Intelligente Steuerung von Prozessschritten in der Fertigung von reaktiven Schmelzklebstoffen (Jowat) 10. Oktober 2017 Lemgo www.its-owl.de Agenda Abschlusspräsentation Einführung Zielsetzung
Session: 1A Intelligente Steuerung von Prozessschritten in der Fertigung von reaktiven Schmelzklebstoffen (Jowat) 10. Oktober 2017 Lemgo www.its-owl.de Agenda Abschlusspräsentation Einführung Zielsetzung
Lehrangebot IuK-Projekt ab Sommersemester 2018
 Lehrangebot IuK-Projekt ab Sommersemester 2018 Bachelorstudiengang Informations- und Kommunikationstechnik Prof. Jörg Thiem http://www.fh-dortmund.de/thiem mailto:joerg.thiem@fh-dortmund.de Organisatorisches
Lehrangebot IuK-Projekt ab Sommersemester 2018 Bachelorstudiengang Informations- und Kommunikationstechnik Prof. Jörg Thiem http://www.fh-dortmund.de/thiem mailto:joerg.thiem@fh-dortmund.de Organisatorisches
m4guide mobile multimodal mobility guide
 m4guide mobile multimodal mobility guide Auftaktveranstaltung Tür zu Tür - Projekte des Bundesministeriums für Wirtschaft und Technologie 17.Oktober 2013 in Bonn Referent: Michael Beer Inhalt 1. Projektziele
m4guide mobile multimodal mobility guide Auftaktveranstaltung Tür zu Tür - Projekte des Bundesministeriums für Wirtschaft und Technologie 17.Oktober 2013 in Bonn Referent: Michael Beer Inhalt 1. Projektziele
Wie entstehen digitale Geschäftsmodelle? Technologie als Basis für nachhaltige Wettbewerbsvorteile. istock.com/pixtum
 Wie entstehen digitale Geschäftsmodelle? Technologie als Basis für nachhaltige Wettbewerbsvorteile istock.com/pixtum Intern Unrestricted Siemens AG AG 2017 Seite Page 2 2017-04-25 Istock.com/ViewApart,
Wie entstehen digitale Geschäftsmodelle? Technologie als Basis für nachhaltige Wettbewerbsvorteile istock.com/pixtum Intern Unrestricted Siemens AG AG 2017 Seite Page 2 2017-04-25 Istock.com/ViewApart,
Kalibration von Prozessfühler: Sicherheit oder Fehlerquelle?
 1 Kalibration von Prozessfühler: Sicherheit oder Fehlerquelle? Philippe Trösch Process Instrumentation Specialist 2 Novasina Die Firma Seit >50 Jahren erfolgreich unterwegs Entwicklung und Produktion in
1 Kalibration von Prozessfühler: Sicherheit oder Fehlerquelle? Philippe Trösch Process Instrumentation Specialist 2 Novasina Die Firma Seit >50 Jahren erfolgreich unterwegs Entwicklung und Produktion in
FÖRDERMODELL. Metalltechnische Industrie NÖ QUALIFIZIERUNGSFÖRDERUNG INTERNATEFÖRDERUNG BEWERBSFÖRDERUNG
 FÖRDERMODELL 2017 Metalltechnische Industrie NÖ QUALIFIZIERUNGSFÖRDERUNG INTERNATEFÖRDERUNG BEWERBSFÖRDERUNG 2 3 WER WIRD GEFÖRDERT? Mitglieder der Fachgruppe Metalltechnische Industrie NÖ der Wirtschaftskammer
FÖRDERMODELL 2017 Metalltechnische Industrie NÖ QUALIFIZIERUNGSFÖRDERUNG INTERNATEFÖRDERUNG BEWERBSFÖRDERUNG 2 3 WER WIRD GEFÖRDERT? Mitglieder der Fachgruppe Metalltechnische Industrie NÖ der Wirtschaftskammer
Programmierung mit LEGO MINDSTORMS NXT. I. Informatik und algorithmisches Problemlösen
 Programmierung mit LEGO MINDSTORMS NXT I. Informatik und algorithmisches Problemlösen Prof. Dr. Karsten Berns Arbeitsgruppe Robotersysteme Fachbereich Informatik Technische Universität Kaiserslautern 30.09.2010
Programmierung mit LEGO MINDSTORMS NXT I. Informatik und algorithmisches Problemlösen Prof. Dr. Karsten Berns Arbeitsgruppe Robotersysteme Fachbereich Informatik Technische Universität Kaiserslautern 30.09.2010
Arbeitsbereich Werkzeugmaschinen und Automatisierungstechnik. Automatisierungstechnik
 1 Arbeitsbereich Werkzeugmaschinen und Automatisierungstechnik Werkzeugmaschinen - Konfiguration von Fertiganlagen - Optimierung des thermischen und dynamischen Verhaltens - Spanntechnik allgemeiner Maschinenbau
1 Arbeitsbereich Werkzeugmaschinen und Automatisierungstechnik Werkzeugmaschinen - Konfiguration von Fertiganlagen - Optimierung des thermischen und dynamischen Verhaltens - Spanntechnik allgemeiner Maschinenbau
POMAR 3D. Positionierung und Orientierung Clients. Dipl.-Ing. Elise Taichmann. NAVIGATIONS-GET-TOGETHER 20. Oktober 2009, Graz
 POMAR 3D Positionierung und Orientierung eines Augmented-Reality Clients Dipl.-Ing. Elise Taichmann 20. Oktober 2009, Graz Inhalt 1. Das Projekt 2. Die Anwendung 3. Herausforderungen 4. Umsetzung 5. Beispiele
POMAR 3D Positionierung und Orientierung eines Augmented-Reality Clients Dipl.-Ing. Elise Taichmann 20. Oktober 2009, Graz Inhalt 1. Das Projekt 2. Die Anwendung 3. Herausforderungen 4. Umsetzung 5. Beispiele
Qualitative Beurteilung photogrammetrischer Aufnahmekonstellationen im Nahbereich
 Qualitative Beurteilung photogrammetrischer Aufnahmekonstellationen im Nahbereich Karsten Raguse Manfred Wiggenhagen Inhalt Motivation Übersicht Optische Messkette Bestandteile der Messkette Simulation
Qualitative Beurteilung photogrammetrischer Aufnahmekonstellationen im Nahbereich Karsten Raguse Manfred Wiggenhagen Inhalt Motivation Übersicht Optische Messkette Bestandteile der Messkette Simulation
Produktentstehung am Beispiel integrativer Ansätze Prof. Albert Albers
 Produktentstehung am Beispiel integrativer Ansätze Prof. Albert Albers IPEK Institut t für Produktentwicklung t kl IMF3 1 24.03.2010 KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum
Produktentstehung am Beispiel integrativer Ansätze Prof. Albert Albers IPEK Institut t für Produktentwicklung t kl IMF3 1 24.03.2010 KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum
VDMA Forum Innovative Lösungen für Industrie 4.0 Messsystemdaten intelligent nutzen - Predictive Maintenance -
 Messsystemdaten intelligent nutzen - Predictive Maintenance - Dipl.-Ing.(FH) Kathrin Streibel, MSc. INHALT Wer ist FAGOR Automation Daten als Grundlage Verwendungsmöglichkeiten Nutzen für WEN? Fazit &
Messsystemdaten intelligent nutzen - Predictive Maintenance - Dipl.-Ing.(FH) Kathrin Streibel, MSc. INHALT Wer ist FAGOR Automation Daten als Grundlage Verwendungsmöglichkeiten Nutzen für WEN? Fazit &
3D-BILDVERARBEITUNG VON DER PROBLEMSTELLUNG ZUM ERGEBNIS MAURICE LINGENFELDER, ENTWICKLUNG BILDVERARBEITUNG, STEMMER IMAGING
 3D-BILDVERARBEITUNG VON DER PROBLEMSTELLUNG ZUM ERGEBNIS MAURICE LINGENFELDER, ENTWICKLUNG BILDVERARBEITUNG, STEMMER IMAGING WARUM 3D-BILDVERARBEITUNG? Freiformflächen mit undefinierten Fehlern Tiefe des
3D-BILDVERARBEITUNG VON DER PROBLEMSTELLUNG ZUM ERGEBNIS MAURICE LINGENFELDER, ENTWICKLUNG BILDVERARBEITUNG, STEMMER IMAGING WARUM 3D-BILDVERARBEITUNG? Freiformflächen mit undefinierten Fehlern Tiefe des
Entwicklung einer flexiblen Montagestation mit Zwei-Arm- Robotern
 Entwicklung einer flexiblen Montagestation mit Zwei-Arm- Robotern Expertenforum Innovative Automatisierungskonzepte 24. Oktober 2013 Übersicht Motivation Zwei- Arm-Systeme Finden einer flexiblen Automatisierungslösung
Entwicklung einer flexiblen Montagestation mit Zwei-Arm- Robotern Expertenforum Innovative Automatisierungskonzepte 24. Oktober 2013 Übersicht Motivation Zwei- Arm-Systeme Finden einer flexiblen Automatisierungslösung
Einsatz von Machine Learning zur Optimierung der Produktion
 .consulting.solutions.partnership Einsatz von Machine Learning zur Optimierung der Produktion Minh Tuan Nguyen Karlsruhe, 15.03.2018 1 2 3 4 Motivation und Herausforderungen Show Case - Anki Overdrive
.consulting.solutions.partnership Einsatz von Machine Learning zur Optimierung der Produktion Minh Tuan Nguyen Karlsruhe, 15.03.2018 1 2 3 4 Motivation und Herausforderungen Show Case - Anki Overdrive