UPNS4D+: Selektive Gewinnung geringhaltiger Lagerstätten durch Untertagerobotik
|
|
|
- Axel Hochberg
- vor 5 Jahren
- Abrufe
Transkript

 - Institut für")

1 UPNS4D+: Selektive Gewinnung geringhaltiger Lagerstätten durch Untertagerobotik Dr. Matthias Rabel, indurad GmbH Koordinator: Dr. Reik Winkel, indurad GmbH Förderkennzeichen: 033R126A Verbundpartner XGraphic Ingenieurgesellschaft mbh GHH Fahrzeuge GmbH MILAN Geoservice GmbH TU Bergakademie Freiberg (TU BAF) - Institut für Markscheidewesen und Geodäsie TU Delft, the Nederlands Section Resource Engineering Indurad GmbH Fritz Rensmann GmbH & Co KG Hermann Paus GmbH RWTH Aachen University Institut für Maschinentechnik der Rohstoffindustrie (IMR) FH Aachen - Institut für Mobile Autonome Systeme und Kognitive Robotik (MASKOR) 1




2 Neuheiten und Projektziele Untertägiges 4D+ Positionierungs-, Navigations- und Mapping-System zur hochselektiven, effizienten und im höchsten Maße sicheren Gewinnung wirtschaftsstrategischer mineralischer Rohstoffe Ausbauphase Sensorgestützte Erkundung 6D Kartographie Markscheiderische Erfassung Halbautomatische Referenzierung und Datenfusionierung Autonome Fahrzeuge Navigation, Lokalisation Kollisionsschutz Produktionsphase Fahrlader im Roomand-Pillar Abbau Radar-Sensorik zur Umfelderkennung Autonome Ladevorgänge Ladestelle Kippstelle 2



3 Innovative Sensorlösungen Datenfusionierung und Merkmalsextraktion Datenerfassung Mobiles Mapping des Bergwerkes zur Erstellung einer dynamischen 6D-Karte zur Lokalisierung und Positionierung Registrierung, Integration und Fusionierung bergbautauglicher Sensordaten Reduktion der großen Datenmengen zur kompakten Speicherung der Karte Geometrieerkennung Interaktive 3D-Visualisierung der 6D-Karte Erzeugung eines Lagerstättenmodells Permanente Aktualisierung Niederflur Ladefahrzeug Integration bergbautauglicher radarbasierter Umfeld-Sensorik Schaufelintegrierte Sensorik 3



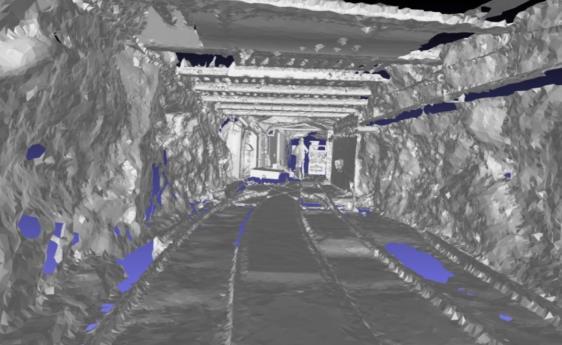
4 Erkundungsfahrzeug Kettenfahrzeug Erste Fahrt Ziel: Bestimmen der Bewegungstrajektorie Lagekorrektur der Punktwolken 3D Raumdarstellung 4

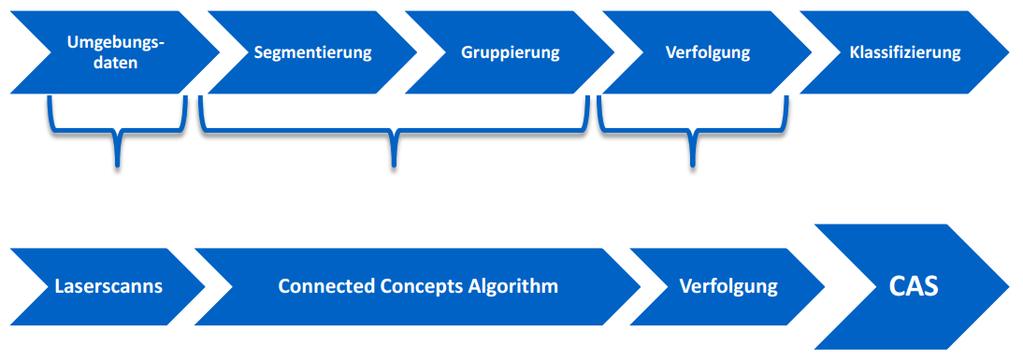
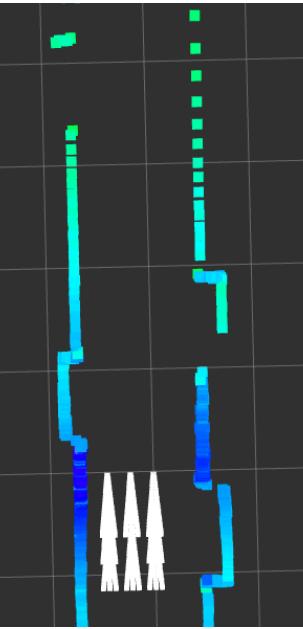
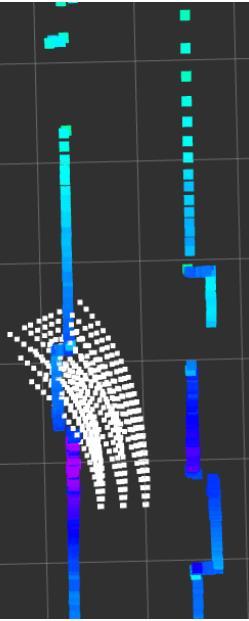
5 Erkundungsfahrzeug Collision Avoidance System (CAS) Laserbasierte Raumerkennung [m] [mm] CAS Zustände Objekterkennung 5
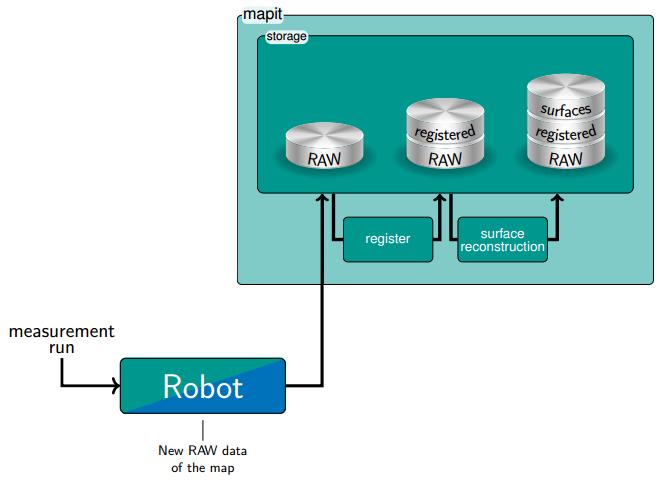

6 Referenzkarte Datenablage Tool mapit 6
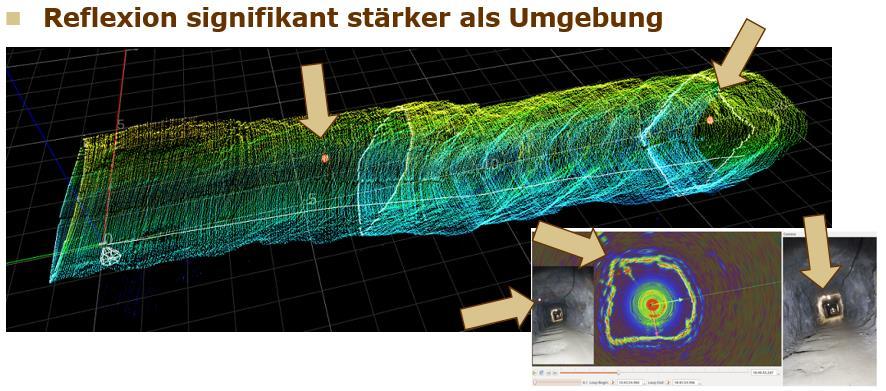
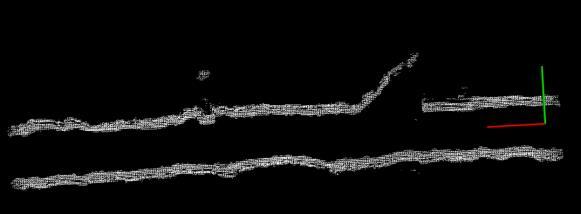




7 Produktionsfahrzeug automatisierter Niederflurlader Sensoranbau Detektion des Raums Detektion starker Ziele Scannendes Radar + Funkortung Extraktion einer Navigationskarte 7






8 Markscheiderische Initialisierung Aktualisierung des Gewinnungsriss Detektion des Ausbaus Geologische Vorerkundung Wavelength Velodyn HDL-32: 903 nm fixed Wavelength Hyperspektralkamera Optimierte Beleuchtung Extraktion von Kluftflächenparametern Erfassung der Hohlraumgeometrie r 4 r-auftaktveranstaltung 4 -Statuskonferenz 2018 Clausthal-Zellerfeld Berlin 30. Januar 10. bis und 1. Februar 11. Juni



9 Datenvisualisierung + Leitstellenintegration 3D Darstellung Repräsentation der 6D Daten Merkmalsextraktion und Fingerprinting Leitstelle 3D Echtzeitvisualisierung Positionsverfolgung Echtzeit Haufwerksanalyse Fahrzeugüberwachung Abbauplanung 9



10 Aktuelle Entwicklung Erkundungsfahrzeug Fahrzeugelektronik wird angepasst Steuerfähigkeit Sensorsystem zur Erkundung arbeitet Produktionssystem Fahrlader kann ferngesteuert werden Notausschleife installiert Sensoren arbeiten Schnittstellen zur Datenbank Werden derzeit implementiert 10
11 Aktuelle Entwicklung Algorithmen & Verfahren Koppelnavigation mit inertialer Messtechnik SLAM Ansatz zur Umfelddetektion Kombination beider Verfahren Extraktion von Merkmalen Abgleich der Merkmale mit Referenzkarte Automatisierung Erste Implementierung: Fahren entlang einer Wand Automatisches ausweichen Geschwindigkeitsvorgabe durch Fernsteuerung 11

12 Aktuelle Entwicklung Algorithmen & Verfahren Koppelnavigation mit inertialer Messtechnik SLAM Ansatz zur Umfelddetektion Kombination beider Verfahren Extraktion von Merkmalen Abgleich der Merkmale mit Referenzkarte 12




13 FKZ: 033R126(A-H) Das Konsortium dankt dem BMBF zur r4-förderung UPNS4D+ 13
Koordinator: Indurad GmbH Teilprojektleitung: Prof. Ingrid Scholl, Institut MASKOR Förderkennzeichen: 033R126(A-H)
") FKZ: 033R126(A-H) UPNS4D+: Untertägiges 4D+ Positionierungs-, Navigations- und Mapping-System zur hochselektiven, effizienten und im höchsten Maße sicheren Gewinnung wirtschaftsstrategischer Rohstoffe
FKZ: 033R126(A-H) UPNS4D+: Untertägiges 4D+ Positionierungs-, Navigations- und Mapping-System zur hochselektiven, effizienten und im höchsten Maße sicheren Gewinnung wirtschaftsstrategischer Rohstoffe
Koordinator: Indurad GmbH Teilprojektleitung: Prof. Ingrid Scholl, Institut MASKOR Förderkennzeichen: 033R126(A-H)
") FKZ: 033R126(A-H) UPNS4D+: Untertägiges 4D+ Positionierungs-, Navigations- und Mapping-System zur hochselektiven, effizienten und im höchsten Maße sicheren Gewinnung wirtschaftsstrategischer Rohstoffe
FKZ: 033R126(A-H) UPNS4D+: Untertägiges 4D+ Positionierungs-, Navigations- und Mapping-System zur hochselektiven, effizienten und im höchsten Maße sicheren Gewinnung wirtschaftsstrategischer Rohstoffe
GIS-basierte topologische Fahrzeuglokalisierung durch LIDAR Kreuzungserkennung
 durch LIDAR Kreuzungserkennung André Müller, Hans-Joachim Wünsche Fakultät für Luft- und Raumfahrttechnik Institut für Technik Autonomer Systeme (TAS) Universität der Bundeswehr München Inhalt - Einleitung
durch LIDAR Kreuzungserkennung André Müller, Hans-Joachim Wünsche Fakultät für Luft- und Raumfahrttechnik Institut für Technik Autonomer Systeme (TAS) Universität der Bundeswehr München Inhalt - Einleitung
Autonome Roboter und Internet der Dinge in untertägigen Anlagen
 ARIDuA Autonome Roboter und Internet der Dinge in untertägigen Anlagen M.Sc. Sebastian Varga, Institut für Markscheidewesen und Geodäsie - TU Freiberg, Dipl.-Ing. Steve Grehl Seit dem 1. Juli 2017 fördert
ARIDuA Autonome Roboter und Internet der Dinge in untertägigen Anlagen M.Sc. Sebastian Varga, Institut für Markscheidewesen und Geodäsie - TU Freiberg, Dipl.-Ing. Steve Grehl Seit dem 1. Juli 2017 fördert
LiDAR Mobile Mapping
 Institut für Kartographie und Geoinformatik Leibniz Universität Hannover LiDAR Mobile Mapping Visualisierung, Vermessung, Fahrerassistenz Claus.Brenner@ikg.uni-hannover.de IKG Erfassungsfahrzeug Riegl
Institut für Kartographie und Geoinformatik Leibniz Universität Hannover LiDAR Mobile Mapping Visualisierung, Vermessung, Fahrerassistenz Claus.Brenner@ikg.uni-hannover.de IKG Erfassungsfahrzeug Riegl
Digitaler Knoten 4.0
 Digitaler Knoten 4.0 Gestaltung und Regelung städtischer Knotenpunkte für sicheres und effizientes, automatisiertes Fahren im gemischten Verkehr 01.12.2017 Fachtagung Automatisiertes und vernetztes Fahren
Digitaler Knoten 4.0 Gestaltung und Regelung städtischer Knotenpunkte für sicheres und effizientes, automatisiertes Fahren im gemischten Verkehr 01.12.2017 Fachtagung Automatisiertes und vernetztes Fahren
Kartenerstellung und Navigation
 Kartenerstellung und Navigation zur Positionserkennung autonomer Fahrzeuge von Ilona Blanck 27. Mai 2008 im Rahmen der Anwendungen I Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik
Kartenerstellung und Navigation zur Positionserkennung autonomer Fahrzeuge von Ilona Blanck 27. Mai 2008 im Rahmen der Anwendungen I Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik
Projektgruppe DynOLog. Informatik 7 & 12 sowie IRPA und IML Frank Weichert. Pascal Libuschewski. Adrian Schyja. Andreas Kamagaew
 Projektgruppe DynOLog Dynamische Detektion von Objekten im Kontext von logistischen Anwendungsfällen Informatik 7 & 12 sowie IRPA und IML Frank Weichert Email: frank.weichert@tu-dortmund.de Pascal Libuschewski
Projektgruppe DynOLog Dynamische Detektion von Objekten im Kontext von logistischen Anwendungsfällen Informatik 7 & 12 sowie IRPA und IML Frank Weichert Email: frank.weichert@tu-dortmund.de Pascal Libuschewski
Teach-In für die 3D-Scan Akquise mit einem Roboter. Teach-In für die 3D-Scanakquise mit einem mobilen Roboter
 Teach-In für die 3D-Scan Akquise mit einem Roboter DoritStruckmeier, Borrmann Dorit Oldenburger 2017 Oliver Borrmann,3D-Tage Andreas Nüchter 1 Zielsetzung der Arbeit Ein mobiler Roboter fährt einen angelernten
Teach-In für die 3D-Scan Akquise mit einem Roboter DoritStruckmeier, Borrmann Dorit Oldenburger 2017 Oliver Borrmann,3D-Tage Andreas Nüchter 1 Zielsetzung der Arbeit Ein mobiler Roboter fährt einen angelernten
Kinematische Bestandsdatenerfassung mit Laserscannern
 Kinematische Bestandsdatenerfassung mit Laserscannern 3D MAPPING Das Mobile Straßen Erfassungs- System (MoSES) Aufnahme des Straßen- oder Schienenkorridors mit ca. 40 m Breite Erfassung des Raumes mit
Kinematische Bestandsdatenerfassung mit Laserscannern 3D MAPPING Das Mobile Straßen Erfassungs- System (MoSES) Aufnahme des Straßen- oder Schienenkorridors mit ca. 40 m Breite Erfassung des Raumes mit
Punktwolken Was kommt danach? Anwendungen im markscheiderischen Lagerstättenmonitoring
 1 Punktwolken Was kommt danach? Anwendungen im markscheiderischen Lagerstättenmonitoring Andreas GEIER und André JOHN Zusammenfassung Im Bergbau gehört das Markscheidewesen zu den klassischen Ingenieurdisziplinen.
1 Punktwolken Was kommt danach? Anwendungen im markscheiderischen Lagerstättenmonitoring Andreas GEIER und André JOHN Zusammenfassung Im Bergbau gehört das Markscheidewesen zu den klassischen Ingenieurdisziplinen.
Akustischer GEO-SCANNER
 Entwicklung eines akustischen Geo-Scanners zur Detektion von Lockergesteinen und Trennflächen TU Clausthal 1 Die Entwicklung des Geo-Scanners ist die Basis für weitreichende Innovationsprozesse in Bergbau
Entwicklung eines akustischen Geo-Scanners zur Detektion von Lockergesteinen und Trennflächen TU Clausthal 1 Die Entwicklung des Geo-Scanners ist die Basis für weitreichende Innovationsprozesse in Bergbau
Real-Time Mining: Grade Monitoring und Control Cockpit
 Real-Time Mining: Grade Monitoring and Control Cockpit 49 Real-Time Mining: Grade Monitoring und Control Cockpit Dr.-Ing. David Buttgereit, Dr.-Ing. Sebastian Bitzen 1, Prof. Dr.-Ing. Jörg Benndorf 2,
Real-Time Mining: Grade Monitoring and Control Cockpit 49 Real-Time Mining: Grade Monitoring und Control Cockpit Dr.-Ing. David Buttgereit, Dr.-Ing. Sebastian Bitzen 1, Prof. Dr.-Ing. Jörg Benndorf 2,
Quadrocopters and it s Applications: Overview of State of the Art Techniques
 : Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
: Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
School of Engineering Institut für Mechatronische Systeme (IMS)
") School of Engineering Institut für Mechatronische Systeme (IMS) Zürcher Fachhochschule www.ims.zhaw.ch Forschung & Entwicklung Institut für Mechatronische Systeme (IMS) Mechatronik bringt die Disziplinen
School of Engineering Institut für Mechatronische Systeme (IMS) Zürcher Fachhochschule www.ims.zhaw.ch Forschung & Entwicklung Institut für Mechatronische Systeme (IMS) Mechatronik bringt die Disziplinen
AFK Aufbereitung feinkörniger polymetallischer heimischer Komplexerze
 AFK Aufbereitung feinkörniger polymetallischer heimischer Komplexerze Koordinator: Prof. Dr. K. Gerald van den Boogaart Förderkennzeichen: 033R128 Verbundpartner Beak Consultants GmbH UVF FIA GmbH TU Bergakademie
AFK Aufbereitung feinkörniger polymetallischer heimischer Komplexerze Koordinator: Prof. Dr. K. Gerald van den Boogaart Förderkennzeichen: 033R128 Verbundpartner Beak Consultants GmbH UVF FIA GmbH TU Bergakademie
Dynamic Maps: Von Karten zu Prozessen
 Dynamic Maps: Von Karten zu Prozessen Claus Brenner Institut für Kartographie und Geoinformatik Universität Hannover Der Titel... Dynamic Maps: Von Karten zu Prozessen? Der Titel... Dynamic Maps: Von Karten
Dynamic Maps: Von Karten zu Prozessen Claus Brenner Institut für Kartographie und Geoinformatik Universität Hannover Der Titel... Dynamic Maps: Von Karten zu Prozessen? Der Titel... Dynamic Maps: Von Karten
Multisensorsystem für die automatisierte Detektion von Gangerzlagerstätten und seltenen Erden in einer Mine. Sebastian Varga
 Multisensorsystem für die automatisierte Detektion von Gangerzlagerstätten und seltenen Erden in einer Mine Sebastian Varga Technische Universität Bergakademie Freiberg, Institut für Markscheidewesen und
Multisensorsystem für die automatisierte Detektion von Gangerzlagerstätten und seltenen Erden in einer Mine Sebastian Varga Technische Universität Bergakademie Freiberg, Institut für Markscheidewesen und
Technologie.Transfer.Anwendung. Der Mensch im Fertigungssystem von morgen: Gestensteuerung im industriellen Umfeld. New Technology To Market (NTTM)
") istockphoto/pei Ling Hoo New Technology To Market (NTTM) Technologie.Transfer.Anwendung. Der Mensch im Fertigungssystem von morgen: Gestensteuerung im industriellen Umfeld Lars Schubert Stuttgart, 19.09.2016
istockphoto/pei Ling Hoo New Technology To Market (NTTM) Technologie.Transfer.Anwendung. Der Mensch im Fertigungssystem von morgen: Gestensteuerung im industriellen Umfeld Lars Schubert Stuttgart, 19.09.2016
Hauptseminar Roboternavigation. Kartenaufbau nach Thrun
 Hauptseminar Roboternavigation Kartenaufbau nach Thrun Hannes Keil keil@in.tum.de 18. Januar 2002 Überblick Kartenaufbau nach Thrun Überblick 1. Einführung in den Kartenbau 2. Einführung in den Aufbau
Hauptseminar Roboternavigation Kartenaufbau nach Thrun Hannes Keil keil@in.tum.de 18. Januar 2002 Überblick Kartenaufbau nach Thrun Überblick 1. Einführung in den Kartenbau 2. Einführung in den Aufbau
Proseminar Künstliche Intelligenz: Wahrnehmung
 Proseminar Künstliche Intelligenz: Wahrnehmung Sommersemester 2011 Computer Science Department Group Inhalt Department of Informatics 1 Sensoren 2 Bildverarbeitung Kantenerkennung 3D-Informationen extrahieren
Proseminar Künstliche Intelligenz: Wahrnehmung Sommersemester 2011 Computer Science Department Group Inhalt Department of Informatics 1 Sensoren 2 Bildverarbeitung Kantenerkennung 3D-Informationen extrahieren
HAW Hamburg Anwendung 1 - Vortrag Andrej Rull
 HAW Hamburg Anwendung 1 - Vortrag Andrej Rull 02122008 1 Gliederung o Motivation o Der Anwendungsfall o Das SLAM Problem o Lösungsansätze und Algorithmen o Zusammenfassung o Ausblick auf AW2 2 Motivation
HAW Hamburg Anwendung 1 - Vortrag Andrej Rull 02122008 1 Gliederung o Motivation o Der Anwendungsfall o Das SLAM Problem o Lösungsansätze und Algorithmen o Zusammenfassung o Ausblick auf AW2 2 Motivation
3D-Stadt- u. Landschaftsmodelle (für das WWW) am Bsp. Projekt 3D Stadtmodell Heidelberg
 am Bsp. Projekt 3D Stadtmodell Heidelberg") 3D-Stadt- u. Landschaftsmodelle (für das WWW) am Bsp. Projekt 3D Stadtmodell Heidelberg Weiterentwicklung von Internet-tauglichen 3D-Stadt-u. Landschaftsmodellen und Software für deren Verwaltung, Erzeugung
3D-Stadt- u. Landschaftsmodelle (für das WWW) am Bsp. Projekt 3D Stadtmodell Heidelberg Weiterentwicklung von Internet-tauglichen 3D-Stadt-u. Landschaftsmodellen und Software für deren Verwaltung, Erzeugung
Industrie 4.0 und Smart Data
 Industrie 4.0 und Smart Data Herausforderungen für die IT-Infrastruktur bei der Auswertung großer heterogener Datenmengen Richard Göbel Inhalt Industrie 4.0 - Was ist das? Was ist neu? Herausforderungen
Industrie 4.0 und Smart Data Herausforderungen für die IT-Infrastruktur bei der Auswertung großer heterogener Datenmengen Richard Göbel Inhalt Industrie 4.0 - Was ist das? Was ist neu? Herausforderungen
Unterstützung des hochautomatisierten Fahrens durch ein Backend Überblick und Motivation
 Unterstützung des hochautomatisierten Fahrens durch ein Backend Überblick und Motivation Dr.-Ing. Lukas Klejnowski Robert Bosch GmbH Agenda Einleitung: Aufgaben des Safety Servers Was ist eine HAF-Karte?
Unterstützung des hochautomatisierten Fahrens durch ein Backend Überblick und Motivation Dr.-Ing. Lukas Klejnowski Robert Bosch GmbH Agenda Einleitung: Aufgaben des Safety Servers Was ist eine HAF-Karte?
Visuelle Information zur robusten Zuordnung von Landmarken für die Navigation mobiler Roboter
 Visuelle Information zur robusten Zuordnung von Landmaren für die Navigation mobiler Roboter Forum Bildverarbeitung 2010 Thomas Emter Thomas Ulrich Loalisierung Herausforderungen Relative Sensoren (Dead
Visuelle Information zur robusten Zuordnung von Landmaren für die Navigation mobiler Roboter Forum Bildverarbeitung 2010 Thomas Emter Thomas Ulrich Loalisierung Herausforderungen Relative Sensoren (Dead
BAYSISforum 2013 Mehr Effizienz durch neue GIS-Technologien
 BAYSISforum 2013 Mehr Effizienz durch neue GIS-Technologien Geoinformationssysteme (GIS) in BAYSIS Rückblick 04/1999: MapInfo Pro. (Desktop) 06/2001: GRAPPA -Kartenfenster (BYBN) 01/2008: MapXtreme-Kartenfenster
BAYSISforum 2013 Mehr Effizienz durch neue GIS-Technologien Geoinformationssysteme (GIS) in BAYSIS Rückblick 04/1999: MapInfo Pro. (Desktop) 06/2001: GRAPPA -Kartenfenster (BYBN) 01/2008: MapXtreme-Kartenfenster
3D Mobile Mapping. Wir bringen die Realität ins Büro
 3D Mobile Mapping Wir bringen die Realität ins Büro Inhalt Vorstellung GRUNDER INGENIEURE AG Weshalb Mobile Mapping Vorstellung Mobile Mapping und LEICA PEGASUS TWO Datenerhebung Varianten von LEICA PEGASUS
3D Mobile Mapping Wir bringen die Realität ins Büro Inhalt Vorstellung GRUNDER INGENIEURE AG Weshalb Mobile Mapping Vorstellung Mobile Mapping und LEICA PEGASUS TWO Datenerhebung Varianten von LEICA PEGASUS
Automatisiertes Fahren im Individualverkehr
 Stadt Ingolstadt Oberbürgermeister Dr. Christian Lösel Dr. Miklos Kiss Automatisiertes Fahren im Individualverkehr Perspektiven aus Ingolstädter Sicht 1 Unterschied zwischen Traum und Realität 2 Wünsche
Stadt Ingolstadt Oberbürgermeister Dr. Christian Lösel Dr. Miklos Kiss Automatisiertes Fahren im Individualverkehr Perspektiven aus Ingolstädter Sicht 1 Unterschied zwischen Traum und Realität 2 Wünsche
1. Statusseminar der Förderinitiative ISETEC II Ortung im Hafenumschlag
 Ortung im Hafenumschlag Berlin, 09. / 10. Dezember 2010 Projektpartner Eurogate Technical Services GmbH Eurogate IT Services GmbH HHLA Container Terminal Burchardkai GmbH TU Hamburg-Harburg: Institut für
Ortung im Hafenumschlag Berlin, 09. / 10. Dezember 2010 Projektpartner Eurogate Technical Services GmbH Eurogate IT Services GmbH HHLA Container Terminal Burchardkai GmbH TU Hamburg-Harburg: Institut für
Hochtechnologie-relevante Metalle in deutschen sulfidischen Buntmetallerzen Ressourcenpotenzialabschätzung / HTMET
 Hochtechnologie-relevante Metalle in deutschen sulfidischen Buntmetallerzen Ressourcenpotenzialabschätzung / HTMET Koordinator: PD Dr. Torsten Graupner H T r 4 HTMET Förderkennzeichen: 033R131 Verbundpartner
Hochtechnologie-relevante Metalle in deutschen sulfidischen Buntmetallerzen Ressourcenpotenzialabschätzung / HTMET Koordinator: PD Dr. Torsten Graupner H T r 4 HTMET Förderkennzeichen: 033R131 Verbundpartner
Validierung der Umfelderkennung für hochautomatisiertes Fahren
 Validierung der Umfelderkennung für hochautomatisiertes Fahren VIRTUAL VEHICLE Research Center Dr. Christian Schwarzl Head of Dependable Systems Group Virtual Vehicle Virtual Vehicle Forschungszentrum
Validierung der Umfelderkennung für hochautomatisiertes Fahren VIRTUAL VEHICLE Research Center Dr. Christian Schwarzl Head of Dependable Systems Group Virtual Vehicle Virtual Vehicle Forschungszentrum
Navigation bei Mensch und Tier
 bei Mensch und Tier Rückblick SimRobot GUI Mobile Roboter Roboterarme Thomas Röfer Begriff Menschliche der Ameisen Sensordaten Rauschen Kognitive Robotik I bei Mensch und Tier 2 Definition Na vi ga ti
bei Mensch und Tier Rückblick SimRobot GUI Mobile Roboter Roboterarme Thomas Röfer Begriff Menschliche der Ameisen Sensordaten Rauschen Kognitive Robotik I bei Mensch und Tier 2 Definition Na vi ga ti
Effiziente, berührungslose Erfassung der Gleisinfrastrukturobjekte
 Effiziente, berührungslose Erfassung der Gleisinfrastrukturobjekte Ein aktuelles Forschungsprojekt der ÖBB-Infrastruktur AG, ÖBB-Infrastruktur AG, Stab Forschung&Entwicklung 55 2 XXXX22 Organigramm ÖBB-Konzern
Effiziente, berührungslose Erfassung der Gleisinfrastrukturobjekte Ein aktuelles Forschungsprojekt der ÖBB-Infrastruktur AG, ÖBB-Infrastruktur AG, Stab Forschung&Entwicklung 55 2 XXXX22 Organigramm ÖBB-Konzern
Navigation bei Mensch und Tier
 Navigation bei Mensch und Tier Thomas Röfer Begriff Menschliche Navigation Navigation der Ameisen Navigation der Bienen Navigation der Vögel Rückblick SimRobot GUI Mobile Roboter Roboterarme Sensordaten
Navigation bei Mensch und Tier Thomas Röfer Begriff Menschliche Navigation Navigation der Ameisen Navigation der Bienen Navigation der Vögel Rückblick SimRobot GUI Mobile Roboter Roboterarme Sensordaten
RatSLAM. Torben Becker. 24. Mai HAW Hamburg
 HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
3D Umfeldrekonstruktion über Structure from Motion
 A HELLA-Group Company 3D Umfeldrekonstruktion über Structure from Motion Dr. Ralph Hänsel, Hella Aglaia Mobile Vision GmbH 11.12.2015 Symposium Beuth Hochschule Geometrische Modellierung und Computational
A HELLA-Group Company 3D Umfeldrekonstruktion über Structure from Motion Dr. Ralph Hänsel, Hella Aglaia Mobile Vision GmbH 11.12.2015 Symposium Beuth Hochschule Geometrische Modellierung und Computational
SAE schaarschmidt application engineering GmbH - Geschäftsprozess und Softwareengineering. seit 1998
 SAE schaarschmidt application engineering GmbH - Geschäftsprozess und Softwareengineering seit 1998 Software und ERP-Systeme (SAP) intelligent vernetzen & nutzen kundenindividuelle Produkte in Serie beauftragen
SAE schaarschmidt application engineering GmbH - Geschäftsprozess und Softwareengineering seit 1998 Software und ERP-Systeme (SAP) intelligent vernetzen & nutzen kundenindividuelle Produkte in Serie beauftragen
Fahrerassistenzsysteme
 Gesamtverband der Deutschen Versicherungswirtschaft e. V. Fahrerassistenzsysteme Notbremssysteme Unfallforschung der Versicherer 11. Februar 2008 Gesamtverband der Deutschen Versicherungswirtschaft e.
Gesamtverband der Deutschen Versicherungswirtschaft e. V. Fahrerassistenzsysteme Notbremssysteme Unfallforschung der Versicherer 11. Februar 2008 Gesamtverband der Deutschen Versicherungswirtschaft e.
Dynamisch adaptive Systemarchitektur zur Optimierung der Prozesssteuerung am Beispiel der Getreideernte
 Dynamisch adaptive Systemarchitektur zur Optimierung der Prozesssteuerung am Beispiel der Getreideernte Thilo Steckel (CLAAS) und Hans W. Griepentrog (Universität Hohenheim) VDI-MEG Kolloquium MÄHDRESCHER
Dynamisch adaptive Systemarchitektur zur Optimierung der Prozesssteuerung am Beispiel der Getreideernte Thilo Steckel (CLAAS) und Hans W. Griepentrog (Universität Hohenheim) VDI-MEG Kolloquium MÄHDRESCHER
IKAR-Tagung in Zermatt,
 Einsatzmöglichkeiten hochaufgelöster 3D-Landschaftsmodelle der Alpen Remote Sensing Solutions GmbH Prof. Dr. Florian Siegert IKAR-Tagung in Zermatt, 25.09.20009 Der Ursprung 3D Visualisierung des Mars
Einsatzmöglichkeiten hochaufgelöster 3D-Landschaftsmodelle der Alpen Remote Sensing Solutions GmbH Prof. Dr. Florian Siegert IKAR-Tagung in Zermatt, 25.09.20009 Der Ursprung 3D Visualisierung des Mars
In- und Outdoor Positionierungssysteme
 In- und Outdoor Positionierungssysteme Eine Übersicht hlemelso@rumms.uni-mannheim.de Lehrstuhl für Praktische Informatik IV In- und Outdoor Positionierungssysteme Agenda I. Warum Positionierung? II. III.
In- und Outdoor Positionierungssysteme Eine Übersicht hlemelso@rumms.uni-mannheim.de Lehrstuhl für Praktische Informatik IV In- und Outdoor Positionierungssysteme Agenda I. Warum Positionierung? II. III.
Vertragsverifikation mittels Fernerkundung
 Vertragsverifikation mittels Fernerkundung Dr. Irmgard Niemeyer Arbeitsgruppe Geomonitoring Institut für Markscheidewesen und Geodäsie TU Bergakademie Freiberg Arbeitsgruppe Geomonitoring TU Bergakademie
Vertragsverifikation mittels Fernerkundung Dr. Irmgard Niemeyer Arbeitsgruppe Geomonitoring Institut für Markscheidewesen und Geodäsie TU Bergakademie Freiberg Arbeitsgruppe Geomonitoring TU Bergakademie
Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo
 Geodäsie 4.0 - was erwartet uns Geodäten? Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo Xiaoguang Luo Leica Geosystems AG, Heerbrugg Seminar an der HFT Stuttgart,
Geodäsie 4.0 - was erwartet uns Geodäten? Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo Xiaoguang Luo Leica Geosystems AG, Heerbrugg Seminar an der HFT Stuttgart,
Monitoringdes Hygienezustands von Rohrleitungssystemen durch Echtzeit-Farbanalyse
 Monitoringdes Hygienezustands von Rohrleitungssystemen durch Echtzeit-Farbanalyse Ing. Martin Handler BEKO Engineering & Informatik AG / Graz Mag. Christian Thonhauser Dipl. Ing. Thonhauser GesmbH/ Perchtoldsdorf
Monitoringdes Hygienezustands von Rohrleitungssystemen durch Echtzeit-Farbanalyse Ing. Martin Handler BEKO Engineering & Informatik AG / Graz Mag. Christian Thonhauser Dipl. Ing. Thonhauser GesmbH/ Perchtoldsdorf
ROBOTOP. Automatisierungspotenziale gemeinsam erkennen und Lösungen visualisieren
 ROBOTOP Automatisierungspotenziale gemeinsam erkennen und Lösungen visualisieren 1 1 2 3 4 5 6 7 Projektziele ROBOTOP Plattform Best Practice Beispielkonfiguration Komponentendatenbank & Kompatibilitätscheck
ROBOTOP Automatisierungspotenziale gemeinsam erkennen und Lösungen visualisieren 1 1 2 3 4 5 6 7 Projektziele ROBOTOP Plattform Best Practice Beispielkonfiguration Komponentendatenbank & Kompatibilitätscheck
AgREE Ag-Recycling von Elektrolyseelektroden
 AgREE Ag-Recycling von Elektrolyseelektroden Koordinator: Andreas Bulan Referent: Dr. Konstantinos Douzinas Förderkennzeichen: 033R144 Verbundpartner Covestro Deutschland AG, Leverkusen Siegfried Jacob
AgREE Ag-Recycling von Elektrolyseelektroden Koordinator: Andreas Bulan Referent: Dr. Konstantinos Douzinas Förderkennzeichen: 033R144 Verbundpartner Covestro Deutschland AG, Leverkusen Siegfried Jacob
Ag-Recycling von Elektrolyseelektroden - AgREE
 Ag-Recycling von Elektrolyseelektroden - AgREE Vortragend: Dr. Konstantinos Douzinas Covestro Deutschland AG Koordinator: Andreas Bulan Covestro Deutschland AG Förderkennzeichen: 033R144 Covestro Deutschland
Ag-Recycling von Elektrolyseelektroden - AgREE Vortragend: Dr. Konstantinos Douzinas Covestro Deutschland AG Koordinator: Andreas Bulan Covestro Deutschland AG Förderkennzeichen: 033R144 Covestro Deutschland
Visualisierung und 3D Computergraphik auf mobilen Geräten
 Visualisierung und 3D Computergraphik auf mobilen Geräten Daniel Weiskopf Institut für Visualisierung und Interaktive Systeme Übersicht Hintergrund Nexus-Umfeld 3D Graphik auf mobilen Geräten Visualisierungsverfahren
Visualisierung und 3D Computergraphik auf mobilen Geräten Daniel Weiskopf Institut für Visualisierung und Interaktive Systeme Übersicht Hintergrund Nexus-Umfeld 3D Graphik auf mobilen Geräten Visualisierungsverfahren
Autonome Autos. Alexander Mayer, Thomas Mühlegger, Maximilian Strasser. February 28, 2015
 February 28, 2015 1 Motivation Automatisierung Verkehr und Mobilität Geschichte der Automatisierung Nachteile der Automatisierung 2 Allgemeines Beispiel: Google driverless car Probleme und Schwierigkeiten
February 28, 2015 1 Motivation Automatisierung Verkehr und Mobilität Geschichte der Automatisierung Nachteile der Automatisierung 2 Allgemeines Beispiel: Google driverless car Probleme und Schwierigkeiten
Kartografie bei ESRI Zürich
 Kartografie bei ESRI Zürich Nicole Allet ESRI Schweiz AG 13. September 2011, Werkschau SGK 1 ESRI Schweiz AG 2011 + Überblick ArcGIS und Kartographie + GIS-basierte Kartenproduktion + Beispiel: GENIUS-DB
Kartografie bei ESRI Zürich Nicole Allet ESRI Schweiz AG 13. September 2011, Werkschau SGK 1 ESRI Schweiz AG 2011 + Überblick ArcGIS und Kartographie + GIS-basierte Kartenproduktion + Beispiel: GENIUS-DB
Bildflug - Navigation - HS BO Lab. für Photogrammetrie: Navigation 1
 Bildflug - Navigation - HS BO Lab. für Photogrammetrie: Navigation 1 Zielsetzung Direkte Messung der Position und Orientierung des airborne Sensors Notwendige Sensorik: GPS, IMU Zeitstempel: Position/
Bildflug - Navigation - HS BO Lab. für Photogrammetrie: Navigation 1 Zielsetzung Direkte Messung der Position und Orientierung des airborne Sensors Notwendige Sensorik: GPS, IMU Zeitstempel: Position/
Intelligente Transportsysteme
 Intelligente Transportsysteme Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz SS 2004 Michael Arnold Typen intelligenter Transportsysteme Fahrer-Assistenz-Systeme Mensch hat Kontrolle
Intelligente Transportsysteme Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz SS 2004 Michael Arnold Typen intelligenter Transportsysteme Fahrer-Assistenz-Systeme Mensch hat Kontrolle
Rolland. Niels Schütte Hristo Gurdzhanov. 1 Vorstellung 2 Gliederung 3 Forschung 4 Rolland 1 5 Rolland 2. 6 Obstacle Map 7 Rolland 3 8 Projekte
 Rolland Niels Schütte Gliederung Forschung Rolland 1 Rolland 2 ObstacleMap Rolland 3 Projekte Probleme Finanzierung Forschung Navigation/Raumkognition Sichere Systeme Rolland 1 Kamera Jede Menge Sensoren
Rolland Niels Schütte Gliederung Forschung Rolland 1 Rolland 2 ObstacleMap Rolland 3 Projekte Probleme Finanzierung Forschung Navigation/Raumkognition Sichere Systeme Rolland 1 Kamera Jede Menge Sensoren
Arbeitspaket IV Methoden zur Verifikation von Analog- und Sensorkomponenten
 Projektplanung Arbeitspaket IV Methoden zur Verifikation von Analog- und Sensorkomponenten Beiträge der Abteilung Adaptive Systeme zu Dr. Jochen Broz Dr. Alexander Dreyer 26. April 2006 Fraunhofer ITWM
Projektplanung Arbeitspaket IV Methoden zur Verifikation von Analog- und Sensorkomponenten Beiträge der Abteilung Adaptive Systeme zu Dr. Jochen Broz Dr. Alexander Dreyer 26. April 2006 Fraunhofer ITWM
 Fotorealistische Stadtmodelle Die 3D RealityMaps-Technologie ermöglicht die Produktion von detailgetreuen n auf Basis amtlicher Daten, hoch auflösender Oberflächenmodelle und Schrägbildaufnahmen. Fotorealistische
Fotorealistische Stadtmodelle Die 3D RealityMaps-Technologie ermöglicht die Produktion von detailgetreuen n auf Basis amtlicher Daten, hoch auflösender Oberflächenmodelle und Schrägbildaufnahmen. Fotorealistische
SCANflow. Dynamisches Betten-Management. Vorstellung im Rahmen der femak-tagung Leipzig September Prozesse. Optimierung. Lösungen.
 Prozesse. Optimierung. Lösungen. Vorstellung im Rahmen der September 2017 Dynamisches Betten-Management Historie Über 105 Jahre im Gesundheitswesen Erfinder und Marktführer ISO-Modulsystem 1912 von Georg
Prozesse. Optimierung. Lösungen. Vorstellung im Rahmen der September 2017 Dynamisches Betten-Management Historie Über 105 Jahre im Gesundheitswesen Erfinder und Marktführer ISO-Modulsystem 1912 von Georg
Erfassung untertägiger Hohlräume mit dem IPS-System bei der RAG Aktiengesellschaft Volker Spreckels, Andreas Schlienkamp
 Erfassung untertägiger Hohlräume mit dem IPS-System bei der Volker Spreckels, Andreas Schlienkamp IPS - Forschung und Entwicklung (FuE) Bei DLR entwickelt für Indoor-Navigation IPS = Integrated Positioning
Erfassung untertägiger Hohlräume mit dem IPS-System bei der Volker Spreckels, Andreas Schlienkamp IPS - Forschung und Entwicklung (FuE) Bei DLR entwickelt für Indoor-Navigation IPS = Integrated Positioning
Wirtschaftsstrategische Rohstoffe (r4) Statuskonferenz der BMBF-Fördermaßnahme r4 30. Januar bis 1. Februar 2018, Ludwig Erhard Haus, Berlin
 Statuskonferenz der BMBF-Fördermaßnahme r4 30. Januar bis 1. Februar 2018, Ludwig Erhard Haus, Berlin") Wirtschaftsstrategische Rohstoffe (r4) Statuskonferenz der BMBF-Fördermaßnahme r4 30. Januar bis 1. Februar 2018, Ludwig Erhard Haus, Berlin 2 WIRTSCHAFTSSTRATEGISCHE ROHSTOFFE Wirtschaftsstrategische
Wirtschaftsstrategische Rohstoffe (r4) Statuskonferenz der BMBF-Fördermaßnahme r4 30. Januar bis 1. Februar 2018, Ludwig Erhard Haus, Berlin 2 WIRTSCHAFTSSTRATEGISCHE ROHSTOFFE Wirtschaftsstrategische
Arbeitsbereich Kognitive Robotik
 Arbeitsbereich Kognitive Robotik Bernd Krieg-Brückner, Thomas Röfer, Axel Lankenau, Rolf Müller Bremer Institut für Sichere Systeme Technologiezentrum Informatik Universität Bremen SPP Raumkognition Themen
Arbeitsbereich Kognitive Robotik Bernd Krieg-Brückner, Thomas Röfer, Axel Lankenau, Rolf Müller Bremer Institut für Sichere Systeme Technologiezentrum Informatik Universität Bremen SPP Raumkognition Themen
Visualisierung funktionaler Bauräume zur Unterstützung des automobilen Entwicklungsprozesses verteilter Funktionen
 Abschlussvortrag Diplomarbeit Visualisierung funktionaler Bauräume zur Unterstützung des automobilen Entwicklungsprozesses verteilter Funktionen Alexander Kahl Betreuer: Michael Sedlmair, Dr. Martin Wechs
Abschlussvortrag Diplomarbeit Visualisierung funktionaler Bauräume zur Unterstützung des automobilen Entwicklungsprozesses verteilter Funktionen Alexander Kahl Betreuer: Michael Sedlmair, Dr. Martin Wechs
AUSBILDUNG für INDUSTRIELLE BILDVERARBEITUNG - Skizze für tertiären Bereich
 AUSBILDUNG für INDUSTRIELLE BILDVERARBEITUNG - Skizze für tertiären Bereich FH-Prof. DI. Kurt Niel University of Applied Sciences Upper Austria Faculty of Engineering and Environmental Sciences kurt.niel@fh-wels.at
AUSBILDUNG für INDUSTRIELLE BILDVERARBEITUNG - Skizze für tertiären Bereich FH-Prof. DI. Kurt Niel University of Applied Sciences Upper Austria Faculty of Engineering and Environmental Sciences kurt.niel@fh-wels.at
Mobile Edge Computing basierte Objekterkennung für hoch- und vollautomatisiertes Fahren
 MEC-Server Mobile Edge Computing basierte Objekterkennung für hoch- und vollautomatisiertes Fahren BMWi-BMBF Fachtagung Automatisiertes und vernetztes Fahren Dr. Rüdiger W. Henn, Robert Bosch GmbH, Berlin,
MEC-Server Mobile Edge Computing basierte Objekterkennung für hoch- und vollautomatisiertes Fahren BMWi-BMBF Fachtagung Automatisiertes und vernetztes Fahren Dr. Rüdiger W. Henn, Robert Bosch GmbH, Berlin,
Visualisierung zeitlicher Verläufe auf geografischen Karten
 geografischen Karten Tominski, Schulze-Wollgast, Schumann Institut für Computergraphik Universität Rostock GeoVis 2003 Hannover, den 27.02.2003 Gliederung Einführung Konzepte zur Zeitdarstellung auf Karten
geografischen Karten Tominski, Schulze-Wollgast, Schumann Institut für Computergraphik Universität Rostock GeoVis 2003 Hannover, den 27.02.2003 Gliederung Einführung Konzepte zur Zeitdarstellung auf Karten
Mobilität der Zukunft Anforderungen aus Kundensicht. Christian Kleine ivm Anwendertreffen 2016 Frankfurt,
 Mobilität der Zukunft Anforderungen aus Kundensicht Christian Kleine ivm Anwendertreffen 2016 Frankfurt, 19.01.2016 AGENDA Über HERE Mobilität der Zukunft 2 2015 HERE HERE Internal Use Only 01 Über HERE
Mobilität der Zukunft Anforderungen aus Kundensicht Christian Kleine ivm Anwendertreffen 2016 Frankfurt, 19.01.2016 AGENDA Über HERE Mobilität der Zukunft 2 2015 HERE HERE Internal Use Only 01 Über HERE
Geodäsie. .aus dem Weltall zum Grundstückseigentum. Studium Bachelor und Master of Science Geodäsie und Geoinformation
 Geodäsie.aus dem Weltall zum Grundstückseigentum Studium Bachelor und Master of Science Geodäsie und Geoinformation 10. September 2013 TU Darmstadt Institut für Geodäsie 1 Geodäsie im FB 13: Institut für
Geodäsie.aus dem Weltall zum Grundstückseigentum Studium Bachelor und Master of Science Geodäsie und Geoinformation 10. September 2013 TU Darmstadt Institut für Geodäsie 1 Geodäsie im FB 13: Institut für
Contentpepper Case Study. pv Europe Inhalte smart verwalten und monetarisieren mit einer neuen Multikanallösung basierend auf Contentpepper
 Contentpepper Case Study pv Europe Inhalte smart verwalten und monetarisieren mit einer neuen Multikanallösung basierend auf Contentpepper Die Ausgangsituation 2 pv Europe ist der englischsprachige Kanal
Contentpepper Case Study pv Europe Inhalte smart verwalten und monetarisieren mit einer neuen Multikanallösung basierend auf Contentpepper Die Ausgangsituation 2 pv Europe ist der englischsprachige Kanal
Koordinator: Dr. Carsten Gellermann Fraunhofer ISC Projektgruppe IWKS Förderkennzeichen: FKZ 033R141G
 Koordinator: Dr. Carsten Gellermann Fraunhofer ISC Projektgruppe IWKS Förderkennzeichen: FKZ 033R141G Verbundpartner Dr. Simon Striepe - Barberini GmbH Dr. Friedhelm Schöne - Duesmann & Hensel Recycling
Koordinator: Dr. Carsten Gellermann Fraunhofer ISC Projektgruppe IWKS Förderkennzeichen: FKZ 033R141G Verbundpartner Dr. Simon Striepe - Barberini GmbH Dr. Friedhelm Schöne - Duesmann & Hensel Recycling
MESSTECHNIK ROBOTERGEFÜHRTE OPTISCHE CMM-3D-SCANNER FÜR AUTOMATISIERTE PRÜFUNGEN
 MESSTECHNIK ROBOTERGEFÜHRTE OPTISCHE CMM-3D-SCANNER FÜR AUTOMATISIERTE PRÜFUNGEN Beschleunigen Sie Ihre industriellen Prüfverfahren, indem die Qualitätskontrolle so nah am Teil wie nur möglich durchgeführt
MESSTECHNIK ROBOTERGEFÜHRTE OPTISCHE CMM-3D-SCANNER FÜR AUTOMATISIERTE PRÜFUNGEN Beschleunigen Sie Ihre industriellen Prüfverfahren, indem die Qualitätskontrolle so nah am Teil wie nur möglich durchgeführt
Erstellung von 3D Katasterdaten für Städte und Gemeinden mit mobilen Vermessungsmethoden. Dr.-Ing. Gunnar Gräfe 3D Mapping Solutions GmbH
 Erstellung von 3D Katasterdaten für Städte und Gemeinden mit mobilen Vermessungsmethoden Dr.-Ing. Gunnar Gräfe 3D Mapping Solutions GmbH Tätigkeitsgebiete der 3D Mapping Solutions GmbH Kinematische Aufnahme
Erstellung von 3D Katasterdaten für Städte und Gemeinden mit mobilen Vermessungsmethoden Dr.-Ing. Gunnar Gräfe 3D Mapping Solutions GmbH Tätigkeitsgebiete der 3D Mapping Solutions GmbH Kinematische Aufnahme
Lehrangebot IuK-Projekt ab Sommersemester 2018
 Lehrangebot IuK-Projekt ab Sommersemester 2018 Bachelorstudiengang Informations- und Kommunikationstechnik Prof. Jörg Thiem http://www.fh-dortmund.de/thiem mailto:joerg.thiem@fh-dortmund.de Organisatorisches
Lehrangebot IuK-Projekt ab Sommersemester 2018 Bachelorstudiengang Informations- und Kommunikationstechnik Prof. Jörg Thiem http://www.fh-dortmund.de/thiem mailto:joerg.thiem@fh-dortmund.de Organisatorisches
Service-Robotik Herausforderungen und Trends. Prof. Dr. Frank Kirchner Universität Bremen, DFKI Robotik Labor Bremen Robert-Hooke-Str.
 Service-Robotik Herausforderungen und Trends Prof. Dr. Frank Kirchner Universität Bremen, DFKI Robotik Labor Bremen Robert-Hooke-Str. 5 28359 Bremen , Bremen Grundlagen zur Anwendung bringen Direkte Einbindung
Service-Robotik Herausforderungen und Trends Prof. Dr. Frank Kirchner Universität Bremen, DFKI Robotik Labor Bremen Robert-Hooke-Str. 5 28359 Bremen , Bremen Grundlagen zur Anwendung bringen Direkte Einbindung
ENTWICKLUNG NETZWERKFÄHIGER MASCHINEN UND ANLAGEN. Alois Wiesinger
 ENTWICKLUNG NETZWERKFÄHIGER MASCHINEN UND ANLAGEN Alois Wiesinger AGENDA Fill your Future Industrielle Transformation aktuelle Entwicklung und deren Konsequenzen Voraussetzung die digitale Strategie Umsetzungsbeispiel
ENTWICKLUNG NETZWERKFÄHIGER MASCHINEN UND ANLAGEN Alois Wiesinger AGENDA Fill your Future Industrielle Transformation aktuelle Entwicklung und deren Konsequenzen Voraussetzung die digitale Strategie Umsetzungsbeispiel
Dr. Sven Holsten. Arbeiten im Werkzeugbau 4.0
 Dr. Sven Holsten Arbeiten im Werkzeugbau 4.0 TSP Das Wichtigste in Zahlen 4 Standorte (Deutschland, Polen, China, Indien) 285 Mitarbeiter 400 Spritzgießwerkzeuge pro Jahr Globaler Ersatzteilservice erfordert
Dr. Sven Holsten Arbeiten im Werkzeugbau 4.0 TSP Das Wichtigste in Zahlen 4 Standorte (Deutschland, Polen, China, Indien) 285 Mitarbeiter 400 Spritzgießwerkzeuge pro Jahr Globaler Ersatzteilservice erfordert
Mercedes-Benz Truck Connectivity im Wandel
 Mercedes-Benz Truck Connectivity im Wandel 30th Internationale AVL Konferenz Motor & Umwelt" 2018 Graz, 7.-8. Juni 2018, Ralf Traub Der Kraftstoffverbrauch von Lkws wird heute maßgeblich durch den Fahrstil
Mercedes-Benz Truck Connectivity im Wandel 30th Internationale AVL Konferenz Motor & Umwelt" 2018 Graz, 7.-8. Juni 2018, Ralf Traub Der Kraftstoffverbrauch von Lkws wird heute maßgeblich durch den Fahrstil
»DIGITALISIERUNG IN BINNENHÄFEN«
 »DIGITALISIERUNG IN BINNENHÄFEN«Trends und Potentiale für den Güterverkehr Prof. Dr.-Ing. Uwe Clausen Hamburg, 09.11.2016 Fraunhofer Seite 1 Neue Herausforderungen für den Verkehr Anforderungen an saubere
»DIGITALISIERUNG IN BINNENHÄFEN«Trends und Potentiale für den Güterverkehr Prof. Dr.-Ing. Uwe Clausen Hamburg, 09.11.2016 Fraunhofer Seite 1 Neue Herausforderungen für den Verkehr Anforderungen an saubere
Templatebasierter CDA-Generator mit ART-DECOR. Vortrag im Rahmen der HL7 Austria Jahrestagung 2017, Wien Dipl.-Inform. Med.
 Templatebasierter CDA-Generator mit ART-DECOR Vortrag im Rahmen der HL7 Austria Jahrestagung 2017, Wien Dipl.-Inform. Med. Markus Birkle Praktische Herausforderungen bei der CDA Implementierung Implementierungsaufwand
Templatebasierter CDA-Generator mit ART-DECOR Vortrag im Rahmen der HL7 Austria Jahrestagung 2017, Wien Dipl.-Inform. Med. Markus Birkle Praktische Herausforderungen bei der CDA Implementierung Implementierungsaufwand
WEBMAPPING PLATTFORMEN MIT GIS-FUNKTIONEN
 WEBMAPPING PLATTFORMEN MIT GIS-FUNKTIONEN Matthias Möller Eduard Gert, Peter Lanz, Andreas Matschenz, René Pikulla, Andreas Walter GIS-AT 2015 GIS Ausbildungstagung 2015 TU Berlin Folie 2 GIS Ausbildungstagung
WEBMAPPING PLATTFORMEN MIT GIS-FUNKTIONEN Matthias Möller Eduard Gert, Peter Lanz, Andreas Matschenz, René Pikulla, Andreas Walter GIS-AT 2015 GIS Ausbildungstagung 2015 TU Berlin Folie 2 GIS Ausbildungstagung
Einzelne Punkte werden in den folgenden Bedarfssteckbriefen aufgegriffen und näher beschrieben.
 Bedarfsprofil I Offenes Themenfeld Von besonderem Interesse sind neuartige Ansätze, die auf Fahrzeughersteller-Ebene noch nicht bekannt sind oder die bislang nicht explizit für das Automobil vorgesehen
Bedarfsprofil I Offenes Themenfeld Von besonderem Interesse sind neuartige Ansätze, die auf Fahrzeughersteller-Ebene noch nicht bekannt sind oder die bislang nicht explizit für das Automobil vorgesehen
DIGITALE VERNETZUNG BY FRAUNHOFER. Diese Technologien erwarten Sie auf dem Tech-Marktplatz
 @ DIGITALE VERNETZUNG BY FRAUNHOFER Diese Technologien erwarten Sie auf dem Tech-Marktplatz 1. CONTACTLESS HUMAN-MACHINE INTERACTION 2. SMART MAINTENANCE 3. SENSORIK IN ADDITIV GEFERTIGTEN BAUTEILEN 4.
@ DIGITALE VERNETZUNG BY FRAUNHOFER Diese Technologien erwarten Sie auf dem Tech-Marktplatz 1. CONTACTLESS HUMAN-MACHINE INTERACTION 2. SMART MAINTENANCE 3. SENSORIK IN ADDITIV GEFERTIGTEN BAUTEILEN 4.
Session: 8 itsowl-tt-scyro Schweißen von Mischwellen mittels hybridkinematischer Roboter 06. Juli 2016 Bielefeld.
 Session: 8 itsowl-tt-scyro Schweißen von Mischwellen mittels hybridkinematischer Roboter 06. Juli 2016 Bielefeld www.its-owl.de Agenda Abschlusspräsentation Einführung Zielsetzung Ergebnisse Resümee und
Session: 8 itsowl-tt-scyro Schweißen von Mischwellen mittels hybridkinematischer Roboter 06. Juli 2016 Bielefeld www.its-owl.de Agenda Abschlusspräsentation Einführung Zielsetzung Ergebnisse Resümee und
Bergamt Stralsund. GAIA-Bergamt Digitales Kartenarchiv des Bergamtes Stralsund
 GAIA-Bergamt Schwerin, November 2016 Aufgabenbereich des Bergamtes Stralsund Bergbauberechtigungen und Betriebsplanverfahren für MV einschließlich des dazugehörigen Küstenmeeres und Festlandsockels Steine/Erden-Bergbau
GAIA-Bergamt Schwerin, November 2016 Aufgabenbereich des Bergamtes Stralsund Bergbauberechtigungen und Betriebsplanverfahren für MV einschließlich des dazugehörigen Küstenmeeres und Festlandsockels Steine/Erden-Bergbau
smart building services
 WC Küche Office Empfang besetzt frei verfügbar (1 Arb.Pl.) smart building services Herzlich Willkommen Max Muster Musterfirma BELEGUNGSPLAN 01.07.2016 9:45 Uhr Besprechungs- Raum Licht Präsenz Gewicht
WC Küche Office Empfang besetzt frei verfügbar (1 Arb.Pl.) smart building services Herzlich Willkommen Max Muster Musterfirma BELEGUNGSPLAN 01.07.2016 9:45 Uhr Besprechungs- Raum Licht Präsenz Gewicht
XGraphic Ingenieurgesellschaft mbh Software nach Maß für die Rohstoffindustrie
 XGraphic Ingenieurgesellschaft mbh Software nach Maß für die Rohstoffindustrie Professor Dr.-Ing. Tilman Küpper, Technischer Geschäftsführer und Maik Hünefeld, Management Assistant der XGraphic Ingenieurgesellschaft
XGraphic Ingenieurgesellschaft mbh Software nach Maß für die Rohstoffindustrie Professor Dr.-Ing. Tilman Küpper, Technischer Geschäftsführer und Maik Hünefeld, Management Assistant der XGraphic Ingenieurgesellschaft
Flexible Roboter- und Transportsysteme für die zunehmende Individualisierung von Produkten
 FZI FORSCHUNGSZENTRUM INFORMATIK Flexible Roboter- und Transportsysteme für die zunehmende Individualisierung von Produkten Prof. Dr.-Ing. Rüdiger Dillmann Arne Rönnau 11. Karlsruher Automations-Treff
FZI FORSCHUNGSZENTRUM INFORMATIK Flexible Roboter- und Transportsysteme für die zunehmende Individualisierung von Produkten Prof. Dr.-Ing. Rüdiger Dillmann Arne Rönnau 11. Karlsruher Automations-Treff
Maßnahmen zur Erhöhung der. Ressourceneffizienz. "Rohstoffe erfolgreich für die Zukunft sichern - effizient Material und Rohstoffe nutzen"
 "Rohstoffe erfolgreich für die Zukunft sichern - effizient Material und Rohstoffe nutzen" am Beispiel einer Lagerstätte" Dr. Ing. Wolfgang Riedel, C&E Consulting und Engineering GmbH, Chemnitz Dipl.-Ing.
"Rohstoffe erfolgreich für die Zukunft sichern - effizient Material und Rohstoffe nutzen" am Beispiel einer Lagerstätte" Dr. Ing. Wolfgang Riedel, C&E Consulting und Engineering GmbH, Chemnitz Dipl.-Ing.
Produktionsintegrierte Qualitätssicherung in der Faserverbundfertigung. 2. Augsburger Produktionstechnik-Kolloquium 2013 Thomas Schmidt, Somen Dutta
 Produktionsintegrierte Qualitätssicherung in der Faserverbundfertigung 2. Augsburger Produktionstechnik-Kolloquium 2013 Thomas Schmidt, Somen Dutta www.dlr.de Folie 2 Inhalt - Produktionstechnologie am
Produktionsintegrierte Qualitätssicherung in der Faserverbundfertigung 2. Augsburger Produktionstechnik-Kolloquium 2013 Thomas Schmidt, Somen Dutta www.dlr.de Folie 2 Inhalt - Produktionstechnologie am
Autonomous Systems Lab Zürich
 Philipp Krüsi 03.11.2011 Steuerung von UGVs Manuelle Fernsteuerung a) Fahrzeug in Sichtweite: Fahren auf Sicht b) Fahrzeug ausser Sicht: Steuerung mit Hilfe von Kamera-Bildern od. anderen Sensoren Autonome
Philipp Krüsi 03.11.2011 Steuerung von UGVs Manuelle Fernsteuerung a) Fahrzeug in Sichtweite: Fahren auf Sicht b) Fahrzeug ausser Sicht: Steuerung mit Hilfe von Kamera-Bildern od. anderen Sensoren Autonome
Sicherheitssysteme und Navigation in Gebäuden
 16. Consens Herbsttagung Sicherheitssysteme und Navigation in Gebäuden Aktuelle Forschungsprojekte am Institut für Bauinformatik der TU Graz Ulrich Walder Univ.-Prof. Dipl. Ing. ETH Dr. techn. Technische
16. Consens Herbsttagung Sicherheitssysteme und Navigation in Gebäuden Aktuelle Forschungsprojekte am Institut für Bauinformatik der TU Graz Ulrich Walder Univ.-Prof. Dipl. Ing. ETH Dr. techn. Technische
librtipc - Bibliothek für echtzeitfähige Interprozesskommunikation
 librtipc - Bibliothek für echtzeitfähige Interprozesskommunikation Josef Raschen Diplomarbeit: Hardwareunabhängige Interprozesskommunikation für Echtzeitanwendungen Lehrstuhl für Betriebssysteme RWTH Aachen
librtipc - Bibliothek für echtzeitfähige Interprozesskommunikation Josef Raschen Diplomarbeit: Hardwareunabhängige Interprozesskommunikation für Echtzeitanwendungen Lehrstuhl für Betriebssysteme RWTH Aachen
Vorstellung des Nebenfaches Kartographie
 Fakultät Forst-/Geo-/Hydrowissenschaften - Fachrichtung Geowissenschaften - Institut für Kartographie Nikolas Prechtel: Vorstellung des Nebenfaches Kartographie 17.7.2012 Kartographie als Wissenschaft
Fakultät Forst-/Geo-/Hydrowissenschaften - Fachrichtung Geowissenschaften - Institut für Kartographie Nikolas Prechtel: Vorstellung des Nebenfaches Kartographie 17.7.2012 Kartographie als Wissenschaft
Bachelorarbeit: Programmable Matter
 Bachelorarbeit: Programmable Matter ProgrammableMatter bzw. programmierbare Strukturen können nach ihrem Aufbau ihre Gestalt noch beliebig verändern. Der entwickelte modulare Roboter ARDS ist, durch seine
Bachelorarbeit: Programmable Matter ProgrammableMatter bzw. programmierbare Strukturen können nach ihrem Aufbau ihre Gestalt noch beliebig verändern. Der entwickelte modulare Roboter ARDS ist, durch seine
Das Place Lab Projekt
 Das Place Lab Projekt Mobile Business Seminar Lehrstuhl für Praktische Informatik IV Prof. Dr. Wolfgang Effelsberg Betreuer: Thomas King dkoelsch@rumms.uni-mannheim.de Seminar Mobile-Business 21.12.2005
Das Place Lab Projekt Mobile Business Seminar Lehrstuhl für Praktische Informatik IV Prof. Dr. Wolfgang Effelsberg Betreuer: Thomas King dkoelsch@rumms.uni-mannheim.de Seminar Mobile-Business 21.12.2005
Sensor Web Wupperverband
 UFK, 05. März 2012 Sensor Web Wupperverband Dipl.Geogr. Christian Heier Stabsstelle Geografische Informationssysteme che@wupperverband.de Gliederung 1 2 3 4 5 Sensor Web im Wupperverband Bereitstellung
UFK, 05. März 2012 Sensor Web Wupperverband Dipl.Geogr. Christian Heier Stabsstelle Geografische Informationssysteme che@wupperverband.de Gliederung 1 2 3 4 5 Sensor Web im Wupperverband Bereitstellung
Integrierte Hilfe-Reaktionsketten zur Erhöhung der Sicherheit des ÖPNV
 Integrierte Hilfe-Reaktionsketten zur Erhöhung der Sicherheit des ÖPNV 1 Verbundpartner STUVA e. V., Köln Gesamtkonzept & Interventionsmaßnahmen Fraunhofer IPK, Berlin Optische Sensorik & Intelligente
Integrierte Hilfe-Reaktionsketten zur Erhöhung der Sicherheit des ÖPNV 1 Verbundpartner STUVA e. V., Köln Gesamtkonzept & Interventionsmaßnahmen Fraunhofer IPK, Berlin Optische Sensorik & Intelligente
UNTERNEHMENSPRÄSENTATION
 UNTERNEHMENSPRÄSENTATION Die i2solutions GmbH übersetzt Herausforderungen der Digitalisierung in datenbank gestützte IT-Lösungen. Diese Automatisierung unterstützt unsere Kunden, Komplexität zu reduzieren
UNTERNEHMENSPRÄSENTATION Die i2solutions GmbH übersetzt Herausforderungen der Digitalisierung in datenbank gestützte IT-Lösungen. Diese Automatisierung unterstützt unsere Kunden, Komplexität zu reduzieren
DINI/nestor-WS5: Werkzeuge Breakout-Session: Metadaten in der Praxis. Moderation: Florian Krämer & Dominik Schmitz
 DINI/nestor-WS5: Werkzeuge Breakout-Session: Metadaten in der Praxis Moderation: Florian Krämer & Dominik Schmitz Breakout-Session Metadaten in der Praxis Rolle von Metadaten im Forschungsdatenmanagement
DINI/nestor-WS5: Werkzeuge Breakout-Session: Metadaten in der Praxis Moderation: Florian Krämer & Dominik Schmitz Breakout-Session Metadaten in der Praxis Rolle von Metadaten im Forschungsdatenmanagement
SensProCloth Innovationsplattform, Bonn 24./
 Innovationsplattform, Bonn 24./ 25. 7. 2009 Systemintegrierte sensorische Schutzbekleidung für Feuerwehr und Katastrophenschutz - Erfassung und Weitermeldung von physiologischen Zustandsparametern und
Innovationsplattform, Bonn 24./ 25. 7. 2009 Systemintegrierte sensorische Schutzbekleidung für Feuerwehr und Katastrophenschutz - Erfassung und Weitermeldung von physiologischen Zustandsparametern und
INNERBETRIEBLICHEN. November 2016 Dr. Alexander Noack. Fraunhofer IPMS
 TRACK, TRACE & SENSE IN DER INNERBETRIEBLICHEN WERTSCHÖPFUNGSKETTE November 2016 Dr. Alexander Noack Agenda IPMS Wireless Microsystems Motivation Smarte RFID-Lösungen (Wenige) Grundlagen zu OPC-UA Die
TRACK, TRACE & SENSE IN DER INNERBETRIEBLICHEN WERTSCHÖPFUNGSKETTE November 2016 Dr. Alexander Noack Agenda IPMS Wireless Microsystems Motivation Smarte RFID-Lösungen (Wenige) Grundlagen zu OPC-UA Die
Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform. Thorsten Jost INF-M2 AW1 Sommersemester
 Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform Thorsten Jost INF-M2 AW1 Sommersemester 2008 Agenda Motivation Feature Detection Beispiele Posenbestimmung in Räumen
Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform Thorsten Jost INF-M2 AW1 Sommersemester 2008 Agenda Motivation Feature Detection Beispiele Posenbestimmung in Räumen