Prinzipien und Komponenten eingebetteter Systeme
|
|
|
- Katharina Hofer
- vor 7 Jahren
- Abrufe
Transkript
1 1 Prinzipen und Komponenten Eingebetteter Systeme (PKES) (7) Ansteuerung von Motoren Sebastian Zug Arbeitsgruppe: Embedded Smart Systems
2 2 Veranstaltungslandkarte Fehlertoleranz, Softwareentwicklung Mikrocontroller Architekturen Sensoren Scheduling Arithmetik Anwendungen Aktoren Kommunikation Energieversorgung
3 3 Literaturhinweise Bücher Hans-Rolf Tränkler, Sensortechnik: Handbuch für Praxis und Wissenschaft Springer, 1998 Jens Steffen Gutmann, Robuste Navigation autonomer mobiler Systeme Dissertation Webseiten (PWM)
4 4 Fragestellungen dieser Vorlesung Erläutern Sie, warum Elektromotoren die wichtigste Antriebsform für Aktuatoren darstellen? Vergleichen Sie die grundlegende Funktion eines Schrittmotors und eines Servomotors. Welche Vorteile ergeben sich aus der unipolaren/bipolaren Bauform eines Schrittmotors? Für welche Aufgaben werden die Timerfunktionen des Mikrocontrollers herangezogen? Wie sind ein Timer grundlegend aufgebaut (Capture&Compare)? Was ist PWM? Welche Arten der PWM Generierung gibt es? Welche Schritte werden bei der Abarbeitung von Interrupts durchlaufen? Welche Folgen können verpasste Interrupts haben? Beziehen Sie sich dabei insbesondere auf verschiedene Sensortypen, mit denen Sie in der Übung gearbeitet haben. Woraus ergibt sich die Prioritätenfolge der Interrupts beim AVR? Nennen Sie Interruptquellen beim AVR? Wie viele Interrupts können sich bei Atmega 2560 stauen, ohne dass einer verloren geht?


5 5 Übergreifendes Beispiel - Gleichstrommotor Beispiel: Permanenterregter Gleichstrommotor +Energieeinsparung durch statisches Magnetfeld +Einfacher Aufbau +Großes Einsatzspektrum Bürstenkontakte Keine Anpassung des Magnetfeldes möglich Source: Varianten: Bürstenlose Gleichstrommotoren
6 6 Beispiel Gleichstrommotor - Kennlinie Leerlaufdrehzahl Anlaufstrom P U I Drehzahlkennlinie (blau) N=f(U,M) Stromkennlinie(schwarz) N=f(U,M) Wirkungsgrad(grün) Anlaufmoment P U I M N Source:


7 7 Schittmotor Schrittweise Bewegung des Stators - diskrete Positionierung Varianten: Bipolar, Unipolar Source: Wikipedia.de
8 8 Servomotoren Interner Regelkreis zur Positionierung über Potentiometer Pulsbreitendefinierte Richtungsvorgabe Unterscheidung digitaler oder analoger Servomotor Source: oberallgeier
9 9 PWM(100) == konstante Geschwindigkeit? Unterschiedliches Verhalten der Treiber und Motoren Variable Radgrößen Veränderlicher Untergrund (Neigung, Reibung) = konstante Rotationsgeschwindigkeit als Herausforderung
10 10 Aufbau des Systems Einfache Odometriescheibe Gleichstrommotor Getriebe Fragen: 1.Wie steuere ich den Gleichstrommotor aus dem Mikrocontroller heraus an? 2.Welche Aufgaben kann ich auf einen Treiberbaustein auslagern? 3.Wie erfasse ich die Messungen der Odometrie im Controller effektiv? 4.Wie bilde ich die Odometrieticks auf eine Bewegung ab?
11 11 Ansteuerung Gleichstrommotor Richtungsorientierung über H-Brücke M M - M
12 12 Ansteuerung Gleichstrommotor Geschwindkeitsdefinition über PWM M + - Periode + - Spannung am Motor 50% ma 90% 10%
13 13 Beispiel LED Üblicherweise ist die mit PIN 13 verbundene LED an einem PWMfähigen Port angebunden.


14 14 Leistungstreiber L298P PWM vom Controller Source: Arduino Homepage STMicroelectronics, Datenblatt L298P
15 15 PWM in Software? #include <avr/io.h> #define F_CPU UL #include <util/delay.h> void setup() { DDRB = _BV(DDB0); } void loop() { PORTB = _BV(PB0); _delay_ms (10); PORTB &=~ _BV(PB0); _delay_ms (90); } Busy-Waiting Nachteil der Implementierung: Die Verzögerung der Verarbeitung wird nicht berücksichtigt. Der Prozessor läuft permanent mit voller Leistung. Timerfunktionen sollten soweit wie möglich in Hardware umgesetzt werden.
16 16 Aufgaben der Timer Zählen von Ereignissen Messen von Zeiten, Frequenzen, Phasen, Perioden Erzeugen von Intervallen, Pulsfolgen, Interrupts Überwachen von Ereignissen und Definition von Zeitstempeln Source: Mikrocontroller und Mikroprocessoren, Brinkschulte
17 17 Capture-and-Compare Einheit interrupt request system clock Capture-Register edge select 2 n Port internal timers timer select MUX Counter external timing sources activate Counter Controller interrupt request Min / Max Capture Funktionalität: Generation von Zeitstempeln
18 18 Capture-and-Compare Einheit system clock Compare-Register 2 n match Digital Comparator Port internal timers timer select MUX Counter external timing sources activate Counter Controller interrupt request Min / Max Compare Funktionalität: Generation von Zeitintervallen, PWM
19 19 Anwendung: Timerinterrupts Compare-Register 12 Digital Comparator Clock Counter Controller 0/ 16 interrupt request Periode p=16 Timerinterrupt: pw=12 match/clear Zähler<pw Zähler pw match/clear Zähler<pw Zähler pw match/clear Zähler<pw p p Overflow Interrupt Compare Interrupt
20 20 Anwendung: Pulsweitenmodulation Compare-Register 12 Digital Comparator match Port Clock Counter Controller 0/ 16 interrupt request Signalverlauf: Periode p=16 Pulsweite: pw=12 Tastverhältnis: a:b = 12:4 match/clear Zähler<pw Zähler pw match/clear Zähler<pw Zähler pw match/clear Zähler<pw a b a b p p
21 21 Umsetzung im AVR Two 8-bit Timer/Counters with Separate Prescaler and Compare Mode Four 16-bit Timer/Counter with Separate Prescaler, Compare- and Capture Mode Four 8-bit PWM Channels Twelve PWM Channels with Programmable Resolution from 2 to 16 Bits
22 22 Modi des 8-Bit Timers I Clear on Compare Match (CTC) f 2 N f clk _ I / O (1 OCRnx ) Variable Periode! Fast PWM f N f clk _ I / O 256
23 23 Timer Modi des 8-Bit Timers II Phase Correct PWM f N f clk _ I / O 510
24 24 Abfragen der Sensoren Lies Messwert Lies Messwert 1 Taktperiode Transformation, Filterung, Detektor, Abstraktion Berechnung Reglerverhalten Idle Messwert verfügbar Busy Waiting bis zum Ende der Periode Schreibe Ausgabe Lies Messwert Idle Timerinterrupt Schreibe Ausgabe Idle Timerinterrupt Schreibe Ausgabe
25 25 Interruptbasierte Programmierung normale Programmabarbeitung Beenden der aktuelle Instruktion eventl. Interrupts deaktiviert Registersatz auf den Stack Zeitpunkt des Interrupts indirekter Sprung über die Interrupt-Einsprungtabelle zur Interrupt-Behandlungs- Routine Ausführung der Interrupt- Einsprung- Routine Ausführung der Interrupt- Behandlungs- Routine RTI: Rückkehr vom Interrupt normalen Programmabarbeitung Wiederherstellung des Prozessorzustands Holen der Register vom Stack
26 26 Praktische Umsetzung Single Device Multi Devices Daisy Chaining
27 27 Vektorisierte Interupts Hauptspeicher IVT Programmzähler CPU Vektor-Basis-Reg. IRQ IACK IBR BUS IACK IRQ Peripheres Gerät IACK Vektor IRQ IACK Vektor IRQ Peripheres Gerät
28 28 Vektorisierte Interrupts IMR Interrupt Masken Register IRR Interrupt Request Register PSN - Prioritätenschaltnetz Source: Mikrocontroller, Wüst
29 29 Interrupts beim AVR 8 Interruptvektoren für externe Interrupts an Port INT Interruptvektoren für interne Ereignisse (Timer, ADC, Comm, Memories) 1 Reset Interruptvektor Die Priorität der Interrupts ist durch die Position in der Interrupt- Vektor-Map ( ) festgelegt. Diese wird im Programmspeicher (Flash) angelegt. Es kann gewählt werden, ob sie am Anfang ( ) stehen soll oder vor der Boot-Loader Sektion. Prioritäten: Reset ext.interrupts 0-7 Timer (hohe Prio) Kommunikation ADC Analog-Komparator Timer (niedrigere Prio) Kommunikation (niedrigere Prio)
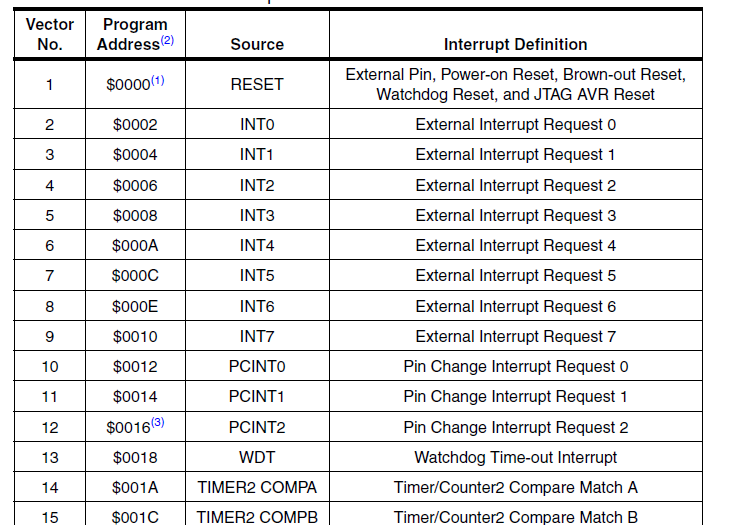
30 30 Interrupt-Vektortabelle des AVR
31 31 Interrupts beim AVR Ausführung eines Interupts wenn: generelle Aktivierung über Status Bit (I-Bit) individuelle Aktivierung der externen Interrupts (Maske) Interrupt Auftritt Verschachtelte Interrupts sind nicht vorgesehen können aber erzwungen werden globale Sperrung der Interrupts, keine Verdrängungsmodelle! Stau von Interrupts: 1. Ein Interrupt tritt auf, während Interrupts gesperrt sind. 2. Setzen des individuelle Interruptflags 3. Soweit ein weiterer Interrupt gleichen Typs auftritt, wird der vorhergehende Interrupt überschrieben. 4. Nach dem Verlassen der ausgeführten Interruptroutine werden die zwischenzeitlich eingetroffenen Interrupts abgearbeitet.
32 32 Darstellung im Assembler-Code < vectors>: 0: 0c jmp 0xe4 ; 0xe4 < ctors_end> 4: 0c jmp 0x126 ; 0x126 < bad_interrupt> 44: 0c jmp 0x12a ; 0x12a < vector_17> e4 < ctors_end>: e4: eor r1, r1 ; Init R1 e6: 1f be out 0x3f, r1 ; Setzen des SREG e8: cf ef ldi r28, 0xFF ; Initialisieren des Stack < bad_interrupt>: 126: 0c jmp 0 ; 0x0 < vectors>
33 33 Darstellung im Assembler-Code a < vector_17>: ISR(TIMER1_COMPA_vect) { 12a: 1f 92 push r1 12c: 0f 92 push r0 12e: 0f b6 in r0, 0x3f ; : 0f 92 push r0 132: eor r1, r1 134: 8f 93 push r24 counter_trigger=1; 136: 81 e0 ldi r24, 0x01 ; 1 138: a 02 sts 0x020A, r24 } 13c: 8f 91 pop r24 13e: 0f 90 pop r0 140: 0f be out 0x3f, r0 ; : 0f 90 pop r0 144: 1f 90 pop r1 146: reti SREG sichern r1=0 r24 sichern Counter_trigger =1 Rücksprung
34 34 Zeitverhalten des Interrupts normale Programmabarbeitung aktuelle Instruktion wird zu Ende geführt Mindestens Interrupts werden 1 Clock Zyklus deaktiviert Zeitpunkt des Interrupts indirekter Sprung über die Interrupt-Einsprungtabelle zur Interrupt-Behandlungs- Routine Ausführung der Interrupt- Einsprung- Routine Mindestens 5 Clock Zyklen Ausführung der Interruptn Clock Zyklen Behandlungs- Routine Fortsetzung der normalen Programmabarbeitung Continue Mindestens RTI: Rückkehr vom Interrupt 5 Clock Zyklen Wiederherstellung des Prozessorzustands
35 Source: Atmega 2560 Handbuch Prinzipien und Komponenten eingebetteter Systeme 35 AVR zwei Varianten externer Interrupts INTn bei INT0 kannst du auf die positive bzw. negative Flanke einen Interrupt auslösen. individuelle Interruptroutinen Teilweise asynchron und damit zum Restart des Prozessors aus verschiedenen Sleep-modi geeignet PCINTn Keine Triggerung auf bestimmte Signalzustände eine allgemeine Interruptfunktion Pattern matching über 8 Bit PCINT0:7 und PCINT8:15 (konfigurierbar über PCMSK1:2) Beide Varianten können als Softwareinterrupts benutzt werden!
36 36 Bis zur nächsten Woche!
Prinzipen und Komponenten Eingebetteter Systeme (PKES) Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme
 Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme") 1 Vorlesung Prinzipen und Komponenten Eingebetteter Systeme (PKES) (3) Mikrocontroller II Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme 2 Mitarbeiter im ottocar Projekt gesucht Ziel:
1 Vorlesung Prinzipen und Komponenten Eingebetteter Systeme (PKES) (3) Mikrocontroller II Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme 2 Mitarbeiter im ottocar Projekt gesucht Ziel:
Prinzipen und Komponenten Eingebetteter Systeme (PKES) Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme
 Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme") 1 Vorlesung Prinzipen und Komponenten Eingebetteter Systeme (PKES) (8) Mikrocontroller III Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme 2 Veranstaltungslandkarte Fehlertoleranz,
1 Vorlesung Prinzipen und Komponenten Eingebetteter Systeme (PKES) (8) Mikrocontroller III Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme 2 Veranstaltungslandkarte Fehlertoleranz,
Prinzipien und Komponenten eingebetteter Systeme
 1 Prinzipen und Komponenten Eingebetteter Systeme (PKES) (2) Mikrocontroller II Sebastian Zug Arbeitsgruppe: Embedded Smart Systems 2 Veranstaltungslandkarte Fehlertoleranz, Softwareentwicklung Mikrocontroller
1 Prinzipen und Komponenten Eingebetteter Systeme (PKES) (2) Mikrocontroller II Sebastian Zug Arbeitsgruppe: Embedded Smart Systems 2 Veranstaltungslandkarte Fehlertoleranz, Softwareentwicklung Mikrocontroller
Atmega Interrupts. Rachid Abdallah Gruppe 3 Betreuer : Benjamin Bös
 Atmega Interrupts Rachid Abdallah Gruppe 3 Betreuer : Benjamin Bös Inhaltsverzeichnis Vorbereitung Was Sind Interrupts Interruptvektoren Software Interrupts Hardware Interrupts Quellen 2 Vorbereitung Rechner
Atmega Interrupts Rachid Abdallah Gruppe 3 Betreuer : Benjamin Bös Inhaltsverzeichnis Vorbereitung Was Sind Interrupts Interruptvektoren Software Interrupts Hardware Interrupts Quellen 2 Vorbereitung Rechner
Einleitung Die Pins alphabetisch Kapitel 1 Programmierung des ATmega8 und des ATmega
 Einleitung... 11 Die Pins alphabetisch.... 12 Kapitel 1 Programmierung des ATmega8 und des ATmega328.... 15 1.1 Was Sie auf den nächsten Seiten erwartet... 19 1.2 Was ist eine Micro Controller Unit (MCU)?....
Einleitung... 11 Die Pins alphabetisch.... 12 Kapitel 1 Programmierung des ATmega8 und des ATmega328.... 15 1.1 Was Sie auf den nächsten Seiten erwartet... 19 1.2 Was ist eine Micro Controller Unit (MCU)?....
Prinzipien und Komponenten eingebetteter Systeme
 1 Prinzipen und Komponenten Eingebetteter Systeme (PKES) (2) Mikrocontroller I Sebastian Zug Arbeitsgruppe: Embedded Smart Systems 2 Veranstaltungslandkarte Fehlertoleranz, Softwareentwicklung Mikrocontroller
1 Prinzipen und Komponenten Eingebetteter Systeme (PKES) (2) Mikrocontroller I Sebastian Zug Arbeitsgruppe: Embedded Smart Systems 2 Veranstaltungslandkarte Fehlertoleranz, Softwareentwicklung Mikrocontroller
Interruptsystem AVR. Interrupt-Quellen: Extern, Timer, ADC, USART usw. (siehe IVT im Anhang) Rücksprungadresse automatisch am Stack.
 Rücksprungadresse automatisch am Stack.") Interruptsystem AVR Interrupt-Quellen: Extern, Timer, ADC, USART usw. (siehe IVT im Anhang) Rücksprungadresse automatisch am Stack Stack im SRAM SP initialisieren Interrupt-Kontrollregister im IO Space
Interruptsystem AVR Interrupt-Quellen: Extern, Timer, ADC, USART usw. (siehe IVT im Anhang) Rücksprungadresse automatisch am Stack Stack im SRAM SP initialisieren Interrupt-Kontrollregister im IO Space
Aufbau eines Assembler-Programms
 Aufbau eines Assembler-Programms. Assembler-Anweisungen (Direktiven) Einbindung von include-files Definition von Konstanten, Reservierung von Speicherplatz im RAM, 2. Was tun, wenn C Reset-Signal erhält
Aufbau eines Assembler-Programms. Assembler-Anweisungen (Direktiven) Einbindung von include-files Definition von Konstanten, Reservierung von Speicherplatz im RAM, 2. Was tun, wenn C Reset-Signal erhält
Tag 3 Timer, ADC und PWM
 Tag 3 Timer, ADC und PWM 09/01/10 Fachbereich Physik Institut für Kernphysik Bastian Löher, Martin Konrad 1 Analog-Digital-Wandler Arbeitet durch schrittweise Näherung Aktivieren des ADCs durch ADC Enable
Tag 3 Timer, ADC und PWM 09/01/10 Fachbereich Physik Institut für Kernphysik Bastian Löher, Martin Konrad 1 Analog-Digital-Wandler Arbeitet durch schrittweise Näherung Aktivieren des ADCs durch ADC Enable
Timer. Funktionsprinzip
 Timer Funktionsprinzip 8-Bit-Timer des ATmega28 Beispiel Timer im Polling- und Interrupt-Betrieb Funktionsprinzip Timer ist ein in Hardware realisierter i Zähler ändert seinen Zählerstand mit einer vorgegebenen
Timer Funktionsprinzip 8-Bit-Timer des ATmega28 Beispiel Timer im Polling- und Interrupt-Betrieb Funktionsprinzip Timer ist ein in Hardware realisierter i Zähler ändert seinen Zählerstand mit einer vorgegebenen
Unter einem Interrupt kann man sich einen durch Hardware ausgelösten Unterprogrammaufruf vorstellen.
 Interrupttechnik mit dem ATmega32 Unter einem Interrupt kann man sich einen durch Hardware ausgelösten Unterprogrammaufruf vorstellen. Aufgrund einer Interruptanforderung wird das laufende Programm unterbrochen
Interrupttechnik mit dem ATmega32 Unter einem Interrupt kann man sich einen durch Hardware ausgelösten Unterprogrammaufruf vorstellen. Aufgrund einer Interruptanforderung wird das laufende Programm unterbrochen
Prinzipien und Komponenten eingebetteter Systeme
 1 Prinzipen und Komponenten Eingebetteter Systeme (PKES) (3) Mikrocontroller II Sebastian Zug Arbeitsgruppe: Embedded Smart Systems 2 Veranstaltungslandkarte Fehlertoleranz, Softwareentwicklung Mikrocontroller
1 Prinzipen und Komponenten Eingebetteter Systeme (PKES) (3) Mikrocontroller II Sebastian Zug Arbeitsgruppe: Embedded Smart Systems 2 Veranstaltungslandkarte Fehlertoleranz, Softwareentwicklung Mikrocontroller
Mikrocomputertechnik
 Mikrocomputertechnik Thema: CPU Timing XC888 und Interrupt System des XC888 und Timer/Counter 0 und 1 -Im InterruptBetrieb - CPU Timing XC888 CPU Timing XC888 Befehl Befehl Befehl Befehlszyklus Befehlszyklus
Mikrocomputertechnik Thema: CPU Timing XC888 und Interrupt System des XC888 und Timer/Counter 0 und 1 -Im InterruptBetrieb - CPU Timing XC888 CPU Timing XC888 Befehl Befehl Befehl Befehlszyklus Befehlszyklus
2.1 Atmega-Peripherie/Interrupts
 2.1 Atmega-Peripherie/Interrupts 2.1.1 Situation Während LED2 fortlaufend blinkt, soll LED2 jederzeit sofort durch Tastendruck von T1 eingeschaltet werden können. Dazu muss man im Programm regelmäÿig nachsehen,
2.1 Atmega-Peripherie/Interrupts 2.1.1 Situation Während LED2 fortlaufend blinkt, soll LED2 jederzeit sofort durch Tastendruck von T1 eingeschaltet werden können. Dazu muss man im Programm regelmäÿig nachsehen,
Atmel AVR für Dummies
 Atmel AVR für Dummies fd0@koeln.ccc.de 29.12.2005 Übersicht 1 Hardware Kurzvorstellung Atmega8 Programmierkabel (Eigenbau vs. Kommerzlösung) Alternative: Bootloader (Programmieren via rs232) Software Speicher
Atmel AVR für Dummies fd0@koeln.ccc.de 29.12.2005 Übersicht 1 Hardware Kurzvorstellung Atmega8 Programmierkabel (Eigenbau vs. Kommerzlösung) Alternative: Bootloader (Programmieren via rs232) Software Speicher
Mikrocontrollerplatine vorbereiten
 Mikrocontrollerplatine vorbereiten Aufgabe B1 Verbinden Sie einen Tastschalter mit dem Anschluss PD2 und eine Leuchtdiode mit dem Anschluss PD6 (Vorwiderstand nicht vergessen!). Teil B Timer 1 Mikrocontrollerplatine
Mikrocontrollerplatine vorbereiten Aufgabe B1 Verbinden Sie einen Tastschalter mit dem Anschluss PD2 und eine Leuchtdiode mit dem Anschluss PD6 (Vorwiderstand nicht vergessen!). Teil B Timer 1 Mikrocontrollerplatine
Name : Klasse : Punkte : Note :
 ESI Semesterendprüfung 15.6.2009 Name : Klasse : Punkte : Note : Zeit: 12.50 bis 13.35 Die Aufgaben sind möglichst direkt auf den Blättern zu lösen (Antworten bitte in ganzen Sätzen!), bei Bedarf die Rückseite
ESI Semesterendprüfung 15.6.2009 Name : Klasse : Punkte : Note : Zeit: 12.50 bis 13.35 Die Aufgaben sind möglichst direkt auf den Blättern zu lösen (Antworten bitte in ganzen Sätzen!), bei Bedarf die Rückseite
myavr Programmierung in C
 myavr Programmierung in C Stefan Goebel Februar 2017 Stefan Goebel myavr Programmierung in C Februar 2017 1 / 12 Grundgerüst... braucht man immer! #include // Register- und Konstantendefinitionen
myavr Programmierung in C Stefan Goebel Februar 2017 Stefan Goebel myavr Programmierung in C Februar 2017 1 / 12 Grundgerüst... braucht man immer! #include // Register- und Konstantendefinitionen
WS 2017/18 Viel Erfolg!!
 Seite 1 von 12 Hochschule München FK03 Komponenten und Programmierung, 90 Minuten Prof. Dr.-Ing. T. Küpper Zugelassene Hilfsmittel: alle eigenen, Taschenrechner WS 2017/18 Viel Erfolg!! Matr.-Nr.: Hörsaal:
Seite 1 von 12 Hochschule München FK03 Komponenten und Programmierung, 90 Minuten Prof. Dr.-Ing. T. Küpper Zugelassene Hilfsmittel: alle eigenen, Taschenrechner WS 2017/18 Viel Erfolg!! Matr.-Nr.: Hörsaal:
Inhalt. Übungen zu Systemnahe Programmierung in C (SPiC) Implementierung von Interruptbehandlungen. Interrupts
 Implementierung von Interruptbehandlungen. Interrupts") Übungen zu Systemnahe Programmierung in C (SPiC) Moritz Strübe, Rainer Müller (Lehrstuhl Informatik 4) Inhalt Interrupts Allgemein AVR Interrupt-Handler Synchronisation volatile Sperren von Interrupts
Übungen zu Systemnahe Programmierung in C (SPiC) Moritz Strübe, Rainer Müller (Lehrstuhl Informatik 4) Inhalt Interrupts Allgemein AVR Interrupt-Handler Synchronisation volatile Sperren von Interrupts
Inhaltsverzeichnis 1 Ein-Bit-Rechner Mikrorechentechnik-Grundlagen Das Mikrocontrollersystem ein Überblick am Beispiel MSP430F1232
 Inhaltsverzeichnis 1 Ein-Bit-Rechner... 15 1.1 Rechenwerk... 15 1.1.1 Register und Takt... 16 1.1.2 Zwischenspeicher... 17 1.1.3 Native und emulierte Datenmanipulationsbefehle... 18 1.2 Steuerwerk... 20
Inhaltsverzeichnis 1 Ein-Bit-Rechner... 15 1.1 Rechenwerk... 15 1.1.1 Register und Takt... 16 1.1.2 Zwischenspeicher... 17 1.1.3 Native und emulierte Datenmanipulationsbefehle... 18 1.2 Steuerwerk... 20
IR NEC Empfänger mit 4x7 LED Anzeige (ATtiny2313)
") // Include C Libriaries #include #define F_CPU 4000000UL #include #include #include #include // Definition der Segmente #define SEG_O
// Include C Libriaries #include #define F_CPU 4000000UL #include #include #include #include // Definition der Segmente #define SEG_O
8. Beschreibung des Prozessors MSP 430
 8. Beschreibung des Prozessors MSP 430 8.1 Die Eigenschaften des MSP 430 8.2 Die Register des MSP 430 8.3 Der Aufbau des Speichers 8.4 Interrupts 8.5 Der Watchdog Programmierkurs II Wolfgang Effelsberg
8. Beschreibung des Prozessors MSP 430 8.1 Die Eigenschaften des MSP 430 8.2 Die Register des MSP 430 8.3 Der Aufbau des Speichers 8.4 Interrupts 8.5 Der Watchdog Programmierkurs II Wolfgang Effelsberg
E Mikrocontroller-Programmierung
 E Mikrocontroller-Programmierung E Mikrocontroller-Programmierung E.1 Überblick Mikrocontroller-Umgebung Prozessor am Beispiel AVR-Mikrocontroller Speicher Peripherie Programmausführung Programm laden
E Mikrocontroller-Programmierung E Mikrocontroller-Programmierung E.1 Überblick Mikrocontroller-Umgebung Prozessor am Beispiel AVR-Mikrocontroller Speicher Peripherie Programmausführung Programm laden
Einführung in die Welt der Microcontroller
 Übersicht Microcontroller Schaltungen Sonstiges Einführung in die Welt der Microcontroller Übersicht Microcontroller Schaltungen Sonstiges Inhaltsverzeichnis 1 Übersicht Möglichkeiten Einsatz 2 Microcontroller
Übersicht Microcontroller Schaltungen Sonstiges Einführung in die Welt der Microcontroller Übersicht Microcontroller Schaltungen Sonstiges Inhaltsverzeichnis 1 Übersicht Möglichkeiten Einsatz 2 Microcontroller
WS 2016/17 Viel Erfolg!!
 Hochschule München FK03 Zugelassene Hilfsmittel: alle eigenen, Taschenrechner Komponenten & Programmierung von Automatisierungssystemen Matr.-Nr.: Name, Vorname: Hörsaal: Unterschrift: Seite 1 von 11 Prof.
Hochschule München FK03 Zugelassene Hilfsmittel: alle eigenen, Taschenrechner Komponenten & Programmierung von Automatisierungssystemen Matr.-Nr.: Name, Vorname: Hörsaal: Unterschrift: Seite 1 von 11 Prof.
16-Bit PCA Timer/Counter
 4.5.1 Programmable Counter Array (PCA) Das Programmable Counter Array besteht aus fünf PCA-Modulen, die einen gemeinsamen 16- Bit Timer/Counter als Zeitbasis verwenden. ECI: Externer Clock-Eingang für
4.5.1 Programmable Counter Array (PCA) Das Programmable Counter Array besteht aus fünf PCA-Modulen, die einen gemeinsamen 16- Bit Timer/Counter als Zeitbasis verwenden. ECI: Externer Clock-Eingang für
Rechnerarchitektur Atmega 32. 1 Vortrag Atmega 32. Von Urs Müller und Marion Knoth. Urs Müller Seite 1 von 7
 1 Vortrag Atmega 32 Von Urs Müller und Marion Knoth Urs Müller Seite 1 von 7 Inhaltsverzeichnis 1 Vortrag Atmega 32 1 1.1 Einleitung 3 1.1.1 Hersteller ATMEL 3 1.1.2 AVR - Mikrocontroller Familie 3 2 Übersicht
1 Vortrag Atmega 32 Von Urs Müller und Marion Knoth Urs Müller Seite 1 von 7 Inhaltsverzeichnis 1 Vortrag Atmega 32 1 1.1 Einleitung 3 1.1.1 Hersteller ATMEL 3 1.1.2 AVR - Mikrocontroller Familie 3 2 Übersicht
Übung "Struktur von Mikrorechnern" (CBS)
") 6 Funktion und Anwendung von Timern 6.1 Allgemeiner Überblick 6.2 Vorteiler 6.3 Betriebsmodi 6.3.1 Normalisierte CPU-Zeit 6.3.2 Normalisierter Zeit-Ausgang 6.3.3 Puls-Weiten-Modulations-Ausgang (PWM) 6.3.4
6 Funktion und Anwendung von Timern 6.1 Allgemeiner Überblick 6.2 Vorteiler 6.3 Betriebsmodi 6.3.1 Normalisierte CPU-Zeit 6.3.2 Normalisierter Zeit-Ausgang 6.3.3 Puls-Weiten-Modulations-Ausgang (PWM) 6.3.4
Embedded Systems
 Embedded Systems I Themen am 18.10.2016 (ES1_16_V3): Timer / Counter Programmierung (Musterlösungen mit und ohne Interrupt), Application Note AVR130 / Atmega8535 Interrupts Unterbrechungsanforderungen
Embedded Systems I Themen am 18.10.2016 (ES1_16_V3): Timer / Counter Programmierung (Musterlösungen mit und ohne Interrupt), Application Note AVR130 / Atmega8535 Interrupts Unterbrechungsanforderungen
Die Technik hinter IoT: Arduino, Raspberry Pi & Co.
 Die Technik hinter IoT: Arduino, Raspberry Pi & Co. Praxisbeispiele für den Hausgebrauch Uwe Steinmann MMK GmbH 25.-26. September 2017 Uwe Steinmann (MMK GmbH) Die Technik hinter IoT 25.-26. September
Die Technik hinter IoT: Arduino, Raspberry Pi & Co. Praxisbeispiele für den Hausgebrauch Uwe Steinmann MMK GmbH 25.-26. September 2017 Uwe Steinmann (MMK GmbH) Die Technik hinter IoT 25.-26. September
Lösungen zum Kurs "Mikrocontroller Hard- und Software
 Lösungen zum Kurs "Mikrocontroller Hard- und Software Gerhard Schmidt Kastanienallee 20 64289 Darmstadt http://www.avr-asm-tutorial.net Lösung Aufgabe 2 Aufgabe 2 sbi DDRB,PB0 2 Takte sbi PORTB,PB0 2 Takte
Lösungen zum Kurs "Mikrocontroller Hard- und Software Gerhard Schmidt Kastanienallee 20 64289 Darmstadt http://www.avr-asm-tutorial.net Lösung Aufgabe 2 Aufgabe 2 sbi DDRB,PB0 2 Takte sbi PORTB,PB0 2 Takte
U23 2008 Abend 3: Musterlösungen, Taster entprellen, Unterprozeduren, Interrupts, Timer
 Abend 3: Musterlösungen, Taster entprellen, Unterprozeduren, Interrupts, Timer Alexander Neumann e.v. http://koeln.ccc.de Köln, 1.9.2008 1 Musterlösungen Aufgabe 1 & 2 2 Taster entprellen
Abend 3: Musterlösungen, Taster entprellen, Unterprozeduren, Interrupts, Timer Alexander Neumann e.v. http://koeln.ccc.de Köln, 1.9.2008 1 Musterlösungen Aufgabe 1 & 2 2 Taster entprellen
Prinzipen und Komponenten Eingebetteter Systeme (PKES) Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme
 Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme") 1 Vorlesung Prinzipen und Komponenten Eingebetteter Systeme (PKES) (3) Mikrocontroller I Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme 2 Veranstaltungslandkarte Fehlertoleranz, Softwareentwicklung
1 Vorlesung Prinzipen und Komponenten Eingebetteter Systeme (PKES) (3) Mikrocontroller I Sebastian Zug Arbeitsgruppe Eingebettete Systeme und Betriebssysteme 2 Veranstaltungslandkarte Fehlertoleranz, Softwareentwicklung
2
 TINF Interrupts EDT-Referat Jürgen Schwarzbauer 2ANB 1995/96 Inhalt : Was ist ein Interrupt? Zweck von Interrupts Maskierbare und nicht maskierbare Interrupts Aufruf eines Interrupts Anwendung von Interrupts
TINF Interrupts EDT-Referat Jürgen Schwarzbauer 2ANB 1995/96 Inhalt : Was ist ein Interrupt? Zweck von Interrupts Maskierbare und nicht maskierbare Interrupts Aufruf eines Interrupts Anwendung von Interrupts
The amforth Cookbook angefangen
 The amforth Cookbook Author: Datum: Erich Wälde 2009-02-22 angefangen 2 Inhaltsverzeichnis 1 Projekt mit ATMEGA 32 5 1.1 Board................................ 5 1.2 Beispiel Applikation........................
The amforth Cookbook Author: Datum: Erich Wälde 2009-02-22 angefangen 2 Inhaltsverzeichnis 1 Projekt mit ATMEGA 32 5 1.1 Board................................ 5 1.2 Beispiel Applikation........................
Einführung in die Programmierung von Mikrocontrollern mit C/C++
 Einführung in die Programmierung von Mikrocontrollern mit C/C++ Vorlesung Prof. Dr.-Ing. habil. G.-P. Ostermeyer Rechenleistung/Speicher Systemintegration Grundlagen der Mikrocontrollertechnik (Wiederholung)
Einführung in die Programmierung von Mikrocontrollern mit C/C++ Vorlesung Prof. Dr.-Ing. habil. G.-P. Ostermeyer Rechenleistung/Speicher Systemintegration Grundlagen der Mikrocontrollertechnik (Wiederholung)
Interrupt-Programmierung
 Interrupt-Programmierung Am Beispiel des ATMEGA16 Microcontrollers Beispiel: Messung der Betriebszeit Die Betriebszeit zeigt an, wie lange der Rechner seit dem Booten läuft Hier: Aktualisierung der Betriebszeit
Interrupt-Programmierung Am Beispiel des ATMEGA16 Microcontrollers Beispiel: Messung der Betriebszeit Die Betriebszeit zeigt an, wie lange der Rechner seit dem Booten läuft Hier: Aktualisierung der Betriebszeit
U5 Fortgeschrittene AVR-Programmierung
 U5 Fortgeschrittene AVR-Programmierung U5 Fortgeschrittene AVR-Programmierung Interrupts Synchronisation mit Unterbrechungsbehandlungen Stromsparmodi des AVR U5.1 U5-1 Externe Interrupts des AVR-μC U5-1
U5 Fortgeschrittene AVR-Programmierung U5 Fortgeschrittene AVR-Programmierung Interrupts Synchronisation mit Unterbrechungsbehandlungen Stromsparmodi des AVR U5.1 U5-1 Externe Interrupts des AVR-μC U5-1
Erzeugen von PWM-Signalen mit dem Atmel AVR-Mikrocontroller
 Fachbereich Elektrotechnik und Informatik Labor für Angewandte Informatik und Datenbanken Praktikum Automatisierung/Echtzeitregelung (BAU/BER) Prof.Dr.-Ing. Coersmeier Erzeugen von PWM-Signalen mit dem
Fachbereich Elektrotechnik und Informatik Labor für Angewandte Informatik und Datenbanken Praktikum Automatisierung/Echtzeitregelung (BAU/BER) Prof.Dr.-Ing. Coersmeier Erzeugen von PWM-Signalen mit dem
ATmega169 Chip: Pin-Layout
 ATmega169 Chip: Pin-Layout Die logische Schnittstelle der Funktionseinheit MCU (Microcontroller Unit) entspricht der physikalischen Schnittstelle der Baueinheit (Chip). Für die Maschinenbefehle sind nur
ATmega169 Chip: Pin-Layout Die logische Schnittstelle der Funktionseinheit MCU (Microcontroller Unit) entspricht der physikalischen Schnittstelle der Baueinheit (Chip). Für die Maschinenbefehle sind nur
Name : Klasse : Punkte : Note :
 Name : Klasse : Punkte : Note : Zeit: 08.00 bis 09.30 Es dürfen alle Unterlagen verwendet werden. Die Aufgaben sind möglichst direkt auf den Blättern zu lösen (Antworten bitte in ganzen Sätzen!), bei Bedarf
Name : Klasse : Punkte : Note : Zeit: 08.00 bis 09.30 Es dürfen alle Unterlagen verwendet werden. Die Aufgaben sind möglichst direkt auf den Blättern zu lösen (Antworten bitte in ganzen Sätzen!), bei Bedarf
U2 Fortgeschrittene AVR-Programmierung. U2-1 Externe Interrupts des AVR-μC. 1 Flanken-/Pegel-Steuerung. 1 Flanken-/Pegel-Steuerung (2) 2 Maskieren
 2 Maskieren") U Fortgeschrittene AVR-Programmierung U Fortgeschrittene AVR-Programmierung U-1 Externe Interrupts des AVR-μC Aufgabe Interrupts volatile-variablen Synchronisation mit Unterbrechungsbehandlungen Stromsparmodi
U Fortgeschrittene AVR-Programmierung U Fortgeschrittene AVR-Programmierung U-1 Externe Interrupts des AVR-μC Aufgabe Interrupts volatile-variablen Synchronisation mit Unterbrechungsbehandlungen Stromsparmodi
Tag 2 Eingabe und Interrupts
 Tag 2 Eingabe und Interrupts 08/30/10 Fachbereich Physik Institut für Kernphysik Bastian Löher, Martin Konrad 1 Taster Direkt an Portpin angeschlossen (etwa PINB0, PIND3) Pull-Up-Widerstände einschalten!
Tag 2 Eingabe und Interrupts 08/30/10 Fachbereich Physik Institut für Kernphysik Bastian Löher, Martin Konrad 1 Taster Direkt an Portpin angeschlossen (etwa PINB0, PIND3) Pull-Up-Widerstände einschalten!
Arduino Kurs Timer und Interrupts. Stephan Laage-Witt FES Lörrach
 Arduino Kurs Timer und Interrupts Stephan Laage-Witt FES Lörrach - 2018 Themen Timer Interrupts Regelmäßige Aufgaben ausführen Exakte Zeitintervalle messen FES Lörrach Juni 2018 2 Exakte Zeiten sind gar
Arduino Kurs Timer und Interrupts Stephan Laage-Witt FES Lörrach - 2018 Themen Timer Interrupts Regelmäßige Aufgaben ausführen Exakte Zeitintervalle messen FES Lörrach Juni 2018 2 Exakte Zeiten sind gar
Für den CTC-Mode kann demnach TCCR1A komplett auf 0 gesetzt werden, weil WGM11 und WGM10 in diesem Register liegen und beide laut Tabelle 0 sind:
 Timerinterrupts beim Arduino Timer 1 (16bit) Register: Bits in den Registern und ihre Bedeutung: Für den CTC-Mode kann demnach TCCR1A komplett auf 0 gesetzt werden, weil WGM11 und WGM10 in diesem Register
Timerinterrupts beim Arduino Timer 1 (16bit) Register: Bits in den Registern und ihre Bedeutung: Für den CTC-Mode kann demnach TCCR1A komplett auf 0 gesetzt werden, weil WGM11 und WGM10 in diesem Register
Projekt: Kaffeemaschinensteuerung mit ATMega128RFA1
 Thorsten Knoll, Embedded Systems, SS14 Projekt: Kaffeemaschinensteuerung mit ATMega128RFA1 Seite 1 von 16 Thorsten Knoll, Embedded Systems, SS14 Projektziele: 1. Beschreibung der Projektumgebung und Vorarbeiten
Thorsten Knoll, Embedded Systems, SS14 Projekt: Kaffeemaschinensteuerung mit ATMega128RFA1 Seite 1 von 16 Thorsten Knoll, Embedded Systems, SS14 Projektziele: 1. Beschreibung der Projektumgebung und Vorarbeiten
4.0 Der Atmel AT89LPx052 Mikrocontroller
 4.0 Der Atmel AT89LPx052 Mikrocontroller Die ersten beiden Derivate der Atmel LP Familie sind der AT89LP2052 und der AT89LP4052 in verschiedenen Gehäusevarianten mit 2 Kbytes bzw. 4 KBytes Flash. Gegenüber
4.0 Der Atmel AT89LPx052 Mikrocontroller Die ersten beiden Derivate der Atmel LP Familie sind der AT89LP2052 und der AT89LP4052 in verschiedenen Gehäusevarianten mit 2 Kbytes bzw. 4 KBytes Flash. Gegenüber
d) Was passiert, wenn das folgende Programmstück übersetzt und ausgeführt
 Was passiert, wenn das folgende Programmstück übersetzt und ausgeführt") Aufgabe 1: (15 Punkte) Bei den Multiple-Choice-Fragen ist jeweils nur eine richtige Antwort eindeutig anzukreuzen. Auf die richtige Antwort gibt es die angegebene Punktzahl. Wollen Sie eine Multiple-Choice-Antwort
Aufgabe 1: (15 Punkte) Bei den Multiple-Choice-Fragen ist jeweils nur eine richtige Antwort eindeutig anzukreuzen. Auf die richtige Antwort gibt es die angegebene Punktzahl. Wollen Sie eine Multiple-Choice-Antwort
U5-2 Register beim AVR-µC
 U5 4. Übungsaufgabe U5 4. Übungsaufgabe U5-2 Register beim AVR-µC U5-2 Register beim AVR-mC Grundlegendes zur Übung mit dem AVR-µC 1 Überblick Register Beim AVR µc sind die Register: I/O Ports Interrupts
U5 4. Übungsaufgabe U5 4. Übungsaufgabe U5-2 Register beim AVR-µC U5-2 Register beim AVR-mC Grundlegendes zur Übung mit dem AVR-µC 1 Überblick Register Beim AVR µc sind die Register: I/O Ports Interrupts
Übungen zu Systemnahe Programmierung in C (SPiC) Inhalt. Moritz Strübe, Rainer Müller (Lehrstuhl Informatik 4) Sommersemester 2014
 Inhalt. Moritz Strübe, Rainer Müller (Lehrstuhl Informatik 4) Sommersemester 2014") Übungen zu Systemnahe Programmierung in C (SPiC) Moritz Strübe, Rainer Müller (Lehrstuhl Informatik 4) Sommersemester 2014 Inhalt Interrupts Allgemein AVR Interrupt-Handler Synchronisation volatile 16-Bit-Zugriffe
Übungen zu Systemnahe Programmierung in C (SPiC) Moritz Strübe, Rainer Müller (Lehrstuhl Informatik 4) Sommersemester 2014 Inhalt Interrupts Allgemein AVR Interrupt-Handler Synchronisation volatile 16-Bit-Zugriffe
Analog-Digital-Converter
 Analog-Digital-Converter Funktionsprinzip ADC bei ATmega128 Beispiel in C Funktionsprinzip 1 Analog-Digital-Wandlung Wandelt analoge Spannung / analogen Strom (Messgröße) in einen binären Wert um, der
Analog-Digital-Converter Funktionsprinzip ADC bei ATmega128 Beispiel in C Funktionsprinzip 1 Analog-Digital-Wandlung Wandelt analoge Spannung / analogen Strom (Messgröße) in einen binären Wert um, der
Mikrocontrollertechnik C2 Timer. Einführung
 C2 Timer Einführung Die drei Timer des ATmega32 bieten sehr viele unterschiedliche Betriebsarten. Im folgenden Kapitel sollen nur einige der Betriebsarten kennen gelernt werden. Was ist ein Timer? Ein
C2 Timer Einführung Die drei Timer des ATmega32 bieten sehr viele unterschiedliche Betriebsarten. Im folgenden Kapitel sollen nur einige der Betriebsarten kennen gelernt werden. Was ist ein Timer? Ein
Ein-Bit-Rechner 15. Mikrorechentechnik-Grundlagen 29
 Ein-Bit-Rechner 15 1.1 Rechenwerk 15 1.1.1 Register und Takt 16 1.1.2 Zwischenspeicher 17 1.1.3 Native und emulierte Datenmanipulationsbefehle 18 1.2 Steuerwerk 20 1.2.1 Programmsteuerbefehle 21 1.2.2
Ein-Bit-Rechner 15 1.1 Rechenwerk 15 1.1.1 Register und Takt 16 1.1.2 Zwischenspeicher 17 1.1.3 Native und emulierte Datenmanipulationsbefehle 18 1.2 Steuerwerk 20 1.2.1 Programmsteuerbefehle 21 1.2.2
Mikrocontrollertechnik
 Matthias Sturm Mikrocontrollertechnik Am Beispiel der MSP430-Familie mit 102 Bildern und 44 Tabellen Fachbuchverlag Leipzig im Carl Hanser Verlag Inhaltsverzeichnis 1 Ein-Bit-Rechner 15 1.1 Rechenwerk
Matthias Sturm Mikrocontrollertechnik Am Beispiel der MSP430-Familie mit 102 Bildern und 44 Tabellen Fachbuchverlag Leipzig im Carl Hanser Verlag Inhaltsverzeichnis 1 Ein-Bit-Rechner 15 1.1 Rechenwerk
AVR-8-bit-Mikrocontroller Gruppe Technologie der AVR-8-bit-Mikrocontroller Teil SPI
 Teil 101 - AVR-Architektur 1 Die Architektur der AVR-Mikrocontroller - der CPU-Kern 1.1 Einleitung und Geschichtliches 1.2 Die Architektur: RISC contra CISC 1.3 ALU - Arithmetic Logic Unit 1.4 Das Status
Teil 101 - AVR-Architektur 1 Die Architektur der AVR-Mikrocontroller - der CPU-Kern 1.1 Einleitung und Geschichtliches 1.2 Die Architektur: RISC contra CISC 1.3 ALU - Arithmetic Logic Unit 1.4 Das Status
U5 Fortgeschrittene AVR-Programmierung U5 Fortgeschrittene AVR-Programmierung. Synchronisation mit Unterbrechungsbehandlungen
 U5 Fortgeschrittene AVR-Programmierung U5 Fortgeschrittene AVR-Programmierung Interrupts volatile-variablen Synchronisation mit Unterbrechungsbehandlungen Stromsparmodi des AVR U5.1 U5-1 Externe Interrupts
U5 Fortgeschrittene AVR-Programmierung U5 Fortgeschrittene AVR-Programmierung Interrupts volatile-variablen Synchronisation mit Unterbrechungsbehandlungen Stromsparmodi des AVR U5.1 U5-1 Externe Interrupts
GdI2 - Systemnahe Programmierung in C Übungen Jürgen Kleinöder Universität Erlangen-Nürnberg Informatik 4, 2006 U4.fm
 U4 4. Übungsaufgabe U4 4. Übungsaufgabe Grundlegendes zur Übung mit dem AVR-µC Register I/O Ports Interrupts AVR-Umgebung U4.1 U4-1 Grundlegendes zur Übung mit dem AVR-mC U4-1 Grundlegendes zur Übung mit
U4 4. Übungsaufgabe U4 4. Übungsaufgabe Grundlegendes zur Übung mit dem AVR-µC Register I/O Ports Interrupts AVR-Umgebung U4.1 U4-1 Grundlegendes zur Übung mit dem AVR-mC U4-1 Grundlegendes zur Übung mit
MikroController der 8051-Familie
 i Dipl.-Ing. Roland Dilsch MikroController der 8051-Familie Aufbau, Funktion, Einsatz Vogel Buchverlag Inhaltsverzeichnis Vorwort 5 1 Was ist ein MikrocontroUer? 13 1.1 Aufbau eines Computers 13 1.2 Entstehung
i Dipl.-Ing. Roland Dilsch MikroController der 8051-Familie Aufbau, Funktion, Einsatz Vogel Buchverlag Inhaltsverzeichnis Vorwort 5 1 Was ist ein MikrocontroUer? 13 1.1 Aufbau eines Computers 13 1.2 Entstehung
MSP 430. Einführung. Was kann er? Hauptthemen. Wie sieht er aus? 64 / 100 polig. Was kann er? MSP 430 1
 MSP 430 Mixed Signal Microcontroller MSP 430 Einführung Der Mikrocontrollers MSP430 von Texas Instruments Das Entwicklungsboard MSP-STK 430A320 http://www.ti.com Texas Instruments 1 Texas Instruments 2
MSP 430 Mixed Signal Microcontroller MSP 430 Einführung Der Mikrocontrollers MSP430 von Texas Instruments Das Entwicklungsboard MSP-STK 430A320 http://www.ti.com Texas Instruments 1 Texas Instruments 2
C.1 Serielle Schnittstelle, erstes Testprogramm (a)
") C.1 Serielle Schnittstelle, erstes Testprogramm (a) Verbinden Sie die Mikrocontrollerplatine mit dem USB-Anschluss Ihres Rechners und laden Sie das abgebildete Testprogramm auf den Mikrocontroller. Es
C.1 Serielle Schnittstelle, erstes Testprogramm (a) Verbinden Sie die Mikrocontrollerplatine mit dem USB-Anschluss Ihres Rechners und laden Sie das abgebildete Testprogramm auf den Mikrocontroller. Es
Übungen zu Systemnahe Programmierung in C (SPiC)
") Übungen zu Systemnahe Programmierung in C (SPiC) Moritz Strübe, Rainer Müller (Lehrstuhl Informatik 4) Sommersemester 2014 Inhalt Interrupts Allgemein AVR Interrupt-Handler Synchronisation volatile Lost
Übungen zu Systemnahe Programmierung in C (SPiC) Moritz Strübe, Rainer Müller (Lehrstuhl Informatik 4) Sommersemester 2014 Inhalt Interrupts Allgemein AVR Interrupt-Handler Synchronisation volatile Lost
Assembler-Unterprogramme
 Assembler-Unterprogramme Rolle des Stack Prinzipieller Ablauf Prinzipieller Aufbau Unterprogramme void main(void) int sub(int i) { { int i,k; return i*2; i = sub(13); } k = sub(14); } Wie macht man das
Assembler-Unterprogramme Rolle des Stack Prinzipieller Ablauf Prinzipieller Aufbau Unterprogramme void main(void) int sub(int i) { { int i,k; return i*2; i = sub(13); } k = sub(14); } Wie macht man das
Autonome Mobile Systeme. Dr. Stefan Enderle
 Autonome Mobile Systeme Dr. Stefan Enderle 2. Mikrocontroller Einleitung Unterschied Controller / Prozessor: Speicher (RAM, Flash, Eprom) intern Viele I/Os (Digital, Analog) Bus-Unterstützung (Seriell,
Autonome Mobile Systeme Dr. Stefan Enderle 2. Mikrocontroller Einleitung Unterschied Controller / Prozessor: Speicher (RAM, Flash, Eprom) intern Viele I/Os (Digital, Analog) Bus-Unterstützung (Seriell,
Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13. Teil VI: Programmieren an weiteren Beispielen
 Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13 Eine Einführung in Aufbau, Funktionsweise, Programmierung und Nutzen von Mikroprozessoren Teil VI: Programmieren an weiteren Beispielen
Programmierung von ATMEL AVR Mikroprozessoren am Beispiel des ATtiny13 Eine Einführung in Aufbau, Funktionsweise, Programmierung und Nutzen von Mikroprozessoren Teil VI: Programmieren an weiteren Beispielen
Inhaltsverzeichnis VII
 Inhaltsverzeichnis 1 Grundlagen der Mikrocontroller... 1 1.1 Mikrocontroller-Familie ATtiny2313, ATtiny26 und ATmega32.... 6 1.1.1 Merkmale des ATtiny2313, ATtiny26 und ATmega32..... 8 1.1.2 Pinbelegung
Inhaltsverzeichnis 1 Grundlagen der Mikrocontroller... 1 1.1 Mikrocontroller-Familie ATtiny2313, ATtiny26 und ATmega32.... 6 1.1.1 Merkmale des ATtiny2313, ATtiny26 und ATmega32..... 8 1.1.2 Pinbelegung
Embedded Systems
 Embedded Systems I Themen am 25.04.2018 (ES1_18_V3): Timer / Counter Programmierung (Musterlösungen mit und ohne Interrupt), Application Note AVR130 / Atmega8535 Interrupts Unterbrechungsanforderungen
Embedded Systems I Themen am 25.04.2018 (ES1_18_V3): Timer / Counter Programmierung (Musterlösungen mit und ohne Interrupt), Application Note AVR130 / Atmega8535 Interrupts Unterbrechungsanforderungen
Einführung Microcontroller
 18. Januar 2011 Inhaltsverzeichnis 1 Einleitung 2 3 4 5 Was ist eigentlich ein Microcontroller? Microcontroller - Was ist das? Microcontroller enthalten: integrierte und gleichzeitig programmierbare Schaltungen,
18. Januar 2011 Inhaltsverzeichnis 1 Einleitung 2 3 4 5 Was ist eigentlich ein Microcontroller? Microcontroller - Was ist das? Microcontroller enthalten: integrierte und gleichzeitig programmierbare Schaltungen,
Die AVR Mikrocontrollerfamilie
 AKES - Ausgewählte Kapitel eingebetteter Systeme 10. Mai 2006 Übersicht über den Vortrag Was sind AVRs? 2/35 Anwendungsfelder Übersicht über den Vortrag Mikrocontroller 3/35 Kleiner Chip Viel integrierte
AKES - Ausgewählte Kapitel eingebetteter Systeme 10. Mai 2006 Übersicht über den Vortrag Was sind AVRs? 2/35 Anwendungsfelder Übersicht über den Vortrag Mikrocontroller 3/35 Kleiner Chip Viel integrierte
Mikrocontroller. eine Einführung. Florian Schmitt - 16.11.2010 1 / 34
 Mikrocontroller eine Einführung Florian Schmitt - 16.11.2010 1 / 34 Inhalt Was sind Mikrocontroller, wozu sind sie nützlich? Unterschiede und Gemeinsamkeiten mit dem PC Wie funktionieren Mikrocontroller
Mikrocontroller eine Einführung Florian Schmitt - 16.11.2010 1 / 34 Inhalt Was sind Mikrocontroller, wozu sind sie nützlich? Unterschiede und Gemeinsamkeiten mit dem PC Wie funktionieren Mikrocontroller
Einführung DIP & AVR EVK1100
 Einführung DIP & AVR EVK1100 Umfang: ca. 2-4 Zeitstunden Display und Buttons (DIP) DIP (Treiber, Code) Aufgaben Emqopter GmbH 2 Display: DIP204 20 Spalten x 4 Zeilen (80 Zeichen) Anzeige von Informationen
Einführung DIP & AVR EVK1100 Umfang: ca. 2-4 Zeitstunden Display und Buttons (DIP) DIP (Treiber, Code) Aufgaben Emqopter GmbH 2 Display: DIP204 20 Spalten x 4 Zeilen (80 Zeichen) Anzeige von Informationen
Serielle Schnittstelle, erstes Testprogramm (a)
") Serielle Schnittstelle, erstes Testprogramm (a) Aufgabe C1 Verbinden Sie die Mikrocontrollerplatine mit dem USB-Anschluss Ihres Rechners und laden Sie das abgebildete Testprogramm auf den Mikrocontroller.
Serielle Schnittstelle, erstes Testprogramm (a) Aufgabe C1 Verbinden Sie die Mikrocontrollerplatine mit dem USB-Anschluss Ihres Rechners und laden Sie das abgebildete Testprogramm auf den Mikrocontroller.
Parallel-IO. Ports am ATmega128
 Parallel-IO Ansteuerung Miniprojekt Lauflicht Ports am ATmega128 PortE (PE7...PE0) alternativ, z.b. USART0 (RS232) 1 Pin von PortC Port C (PC7...PC0) 1 Parallel-IO-Port "Sammelsurium" verschiedener Speicher
Parallel-IO Ansteuerung Miniprojekt Lauflicht Ports am ATmega128 PortE (PE7...PE0) alternativ, z.b. USART0 (RS232) 1 Pin von PortC Port C (PC7...PC0) 1 Parallel-IO-Port "Sammelsurium" verschiedener Speicher
Microcontroller Selbststudium Semesterwoche 9
 Microcontroller Selbststudium Semesterwoche 9 Kurzfragen zum Thema Interrupts 1. Wozu werden Interrupts benötigt (Beispiele)? Interrupts werden überall dort verwendet, wo auf zeitkritische Ereignisse reagiert
Microcontroller Selbststudium Semesterwoche 9 Kurzfragen zum Thema Interrupts 1. Wozu werden Interrupts benötigt (Beispiele)? Interrupts werden überall dort verwendet, wo auf zeitkritische Ereignisse reagiert
LabView mit der myavr Produktfamilie. Andreas Düring
 myavr Anwendungsbeispiel LabView mit der myavr Produktfamilie l LabView mit der myavr Produktfamilie Erstellt von: Andreas Düring Inhalt Einleitung... 3 Zielstellung... 3 Voraussetzungen... 4 Durchführung...
myavr Anwendungsbeispiel LabView mit der myavr Produktfamilie l LabView mit der myavr Produktfamilie Erstellt von: Andreas Düring Inhalt Einleitung... 3 Zielstellung... 3 Voraussetzungen... 4 Durchführung...
a) Welche Aussage zu Zeigern ist richtig? Die Übergabesemantik für Zeiger als Funktionsparameter ist callby-value.
 Welche Aussage zu Zeigern ist richtig? Die Übergabesemantik für Zeiger als Funktionsparameter ist callby-value.") Aufgabe 1: (15 Punkte) Bei den Multiple-Choice-Fragen ist jeweils nur eine richtige Antwort eindeutig anzukreuzen. Auf die richtige Antwort gibt es die angegebene Punktzahl. Wollen Sie eine Multiple-Choice-Antwort
Aufgabe 1: (15 Punkte) Bei den Multiple-Choice-Fragen ist jeweils nur eine richtige Antwort eindeutig anzukreuzen. Auf die richtige Antwort gibt es die angegebene Punktzahl. Wollen Sie eine Multiple-Choice-Antwort
05. Assembler-Programmierung. Datenstrukturen des ATMega32. Literatur
 0. Assembler-Programmierung Datenstrukturen des ATMega32 Literatur mikrocontroller.net avr-asm-tutorial.net asm Alles über AVR AVR-Assembler-Einführung Assembler AVR-Aufbau, Register, Befehle 2008: ouravr.com/attachment/microschematic/index.swf
0. Assembler-Programmierung Datenstrukturen des ATMega32 Literatur mikrocontroller.net avr-asm-tutorial.net asm Alles über AVR AVR-Assembler-Einführung Assembler AVR-Aufbau, Register, Befehle 2008: ouravr.com/attachment/microschematic/index.swf
Prozessoren für mobile und. eingebettete Systeme II: Die AVR-Architektur. EMES: Eigenschaften mobiler und eingebetteter Systeme
 EMES: Eigenschaften mobiler und eingebetteter Systeme Prozessoren für mobile und 00101111010010011101001010101 eingebettete Systeme II: Die AVR-Architektur Dipl. Inf. Jan Richling Wintersemester 2004/2005
EMES: Eigenschaften mobiler und eingebetteter Systeme Prozessoren für mobile und 00101111010010011101001010101 eingebettete Systeme II: Die AVR-Architektur Dipl. Inf. Jan Richling Wintersemester 2004/2005
E.1 Einleitung. Teil E Pulsweitenmodulation (PWM) 1
 1") E.1 Einleitung Wenn große Verbraucher (Elektromotoren, Heizungen, Lampen) stufenlos angesteuert werden müssen, geschieht dies oft mittels Pulsweitenmodulation (PWM). Die Versorgungsspannung des Verbrauchers
E.1 Einleitung Wenn große Verbraucher (Elektromotoren, Heizungen, Lampen) stufenlos angesteuert werden müssen, geschieht dies oft mittels Pulsweitenmodulation (PWM). Die Versorgungsspannung des Verbrauchers
 TECHNISCHE HOCHSCHULE NÜRNBERG GEORG SIMON OHM Die Mikroprogrammebene eines Rechners Das Abarbeiten eines Arbeitszyklus eines einzelnen Befehls besteht selbst wieder aus verschiedenen Schritten, z.b. Befehl
TECHNISCHE HOCHSCHULE NÜRNBERG GEORG SIMON OHM Die Mikroprogrammebene eines Rechners Das Abarbeiten eines Arbeitszyklus eines einzelnen Befehls besteht selbst wieder aus verschiedenen Schritten, z.b. Befehl
Lotto. eine Projektarbeit in DVT. von Sven Schwab
 Lotto eine Projektarbeit in DVT von Sven Schwab IAV 2 Nürnberg, den 21.07.2010 Agenda 1) Idee 2) Projektbestandteile - Software - Hardware 3) Projektdetails - Ablauf - Fehler die auftreten können 4) Quellcode
Lotto eine Projektarbeit in DVT von Sven Schwab IAV 2 Nürnberg, den 21.07.2010 Agenda 1) Idee 2) Projektbestandteile - Software - Hardware 3) Projektdetails - Ablauf - Fehler die auftreten können 4) Quellcode
Prinzipien und Komponenten eingebetteter Systeme
 1 Prinzipen und Komponenten Eingebetteter Systeme (PKES) (6) Aktoren und Energieversorgung Sebastian Zug Arbeitsgruppe: Embedded Smart Systems 2 GPS Bezeichnung: eigentlicher Name NAVSTAR (Navigation System
1 Prinzipen und Komponenten Eingebetteter Systeme (PKES) (6) Aktoren und Energieversorgung Sebastian Zug Arbeitsgruppe: Embedded Smart Systems 2 GPS Bezeichnung: eigentlicher Name NAVSTAR (Navigation System
Studiengang Maschinenbau, Schwerpunkt Mechatronik (früher: Automatisierungstechnik) Seite 1 von 8
 Seite 1 von 8") Studiengang Maschinenbau, Schwerpunkt Mechatronik (früher: Automatisierungstechnik) Seite 1 von 8 Hochschule München Fakultät 03 Zugelassene Hilfsmittel: alle eigenen, Taschenrechner Viel Erfolg!! Komponenten
Studiengang Maschinenbau, Schwerpunkt Mechatronik (früher: Automatisierungstechnik) Seite 1 von 8 Hochschule München Fakultät 03 Zugelassene Hilfsmittel: alle eigenen, Taschenrechner Viel Erfolg!! Komponenten
Selbststudium Informationssysteme - H1102 Christian Bontekoe & Felix Rohrer
 Übung RA, Kapitel 1.5 1. Beantworten Sie bitte folgende Repetitionsfragen 1. Beschreiben Sie in eigenen Worten und mit einer Skizze die Schichtung einer Multilevel Maschine. Folie 5, rechte Seite 2. Welche
Übung RA, Kapitel 1.5 1. Beantworten Sie bitte folgende Repetitionsfragen 1. Beschreiben Sie in eigenen Worten und mit einer Skizze die Schichtung einer Multilevel Maschine. Folie 5, rechte Seite 2. Welche
C++ mit dem Arduino (Uno und Mega2560)
") C++ mit dem Arduino (Uno und Mega2560) 1. Toolchain Als toolchain bezeichnet man die Reihe von Software, die nötig ist um den Prozessor zu programmieren, das Ergebnis draufzuladen und dann zu testen. Hier
C++ mit dem Arduino (Uno und Mega2560) 1. Toolchain Als toolchain bezeichnet man die Reihe von Software, die nötig ist um den Prozessor zu programmieren, das Ergebnis draufzuladen und dann zu testen. Hier
AVR Ein/Ausgabe. Inhaltsverzeichnis
 Inhaltsverzeichnis AVR Ein/Ausgabe 1 Pinout Arduino Board...4 2 AVR PORT - I N P U T PINB...6 3 AVR PORT Architektur Bausteine...8 4 AVR Port O U T P U T PORTB...10 5 AVR PORT Architektur: Fragen 2...12
Inhaltsverzeichnis AVR Ein/Ausgabe 1 Pinout Arduino Board...4 2 AVR PORT - I N P U T PINB...6 3 AVR PORT Architektur Bausteine...8 4 AVR Port O U T P U T PORTB...10 5 AVR PORT Architektur: Fragen 2...12
5 Funktionsbibliothek für den Controller XMC1100
 5 Funktionsbibliothek für den Controller XMC11 Alle Header-Dateien werden in der Datei in ein richtlinienkonformes Projekt eingebunden. 5.1 Verzögerungsfunktionen Delay Verzögert den Programmablauf für
5 Funktionsbibliothek für den Controller XMC11 Alle Header-Dateien werden in der Datei in ein richtlinienkonformes Projekt eingebunden. 5.1 Verzögerungsfunktionen Delay Verzögert den Programmablauf für
Mikrocontroller vs. Mikroprozessor 1/3
 Mikrocontroller vs. Mikroprozessor 1/3 Kriterium Microprozessor Microcontroller Aufgaben Nur für Rechenaufgaben zuständig, I/O praktisch nur mit zusätzlichen Bausteinen Speicher GB-Bereich, erweiterbar,
Mikrocontroller vs. Mikroprozessor 1/3 Kriterium Microprozessor Microcontroller Aufgaben Nur für Rechenaufgaben zuständig, I/O praktisch nur mit zusätzlichen Bausteinen Speicher GB-Bereich, erweiterbar,
Mikroprozessoren Grundlagen AVR-Controller Input / Output (I/O) Interrupt Mathematische Operationen
 Interrupt Mathematische Operationen") Mikroprozessoren Grundlagen Aufbau, Blockschaltbild Grundlegende Datentypen AVR-Controller Anatomie Befehlssatz Assembler Speicherzugriff Adressierungsarten Kontrollstrukturen Stack Input / Output (I/O)
Mikroprozessoren Grundlagen Aufbau, Blockschaltbild Grundlegende Datentypen AVR-Controller Anatomie Befehlssatz Assembler Speicherzugriff Adressierungsarten Kontrollstrukturen Stack Input / Output (I/O)
Klasse, Name : Datum : Rad l/r Linienfolger l/r Laderaum ATMEGA 128
 HTL_RoboterDKU.odt Übung : Arbeiten mit dem HTL Leonding Roboter Seite : 1 von 7 1. Roboter Peripherie Eingänge Ausgänge DIGITAL ANA- LG DATEN Taster Kante l/r Rad l/r Linienfolger l/r Laderaum Klappe
HTL_RoboterDKU.odt Übung : Arbeiten mit dem HTL Leonding Roboter Seite : 1 von 7 1. Roboter Peripherie Eingänge Ausgänge DIGITAL ANA- LG DATEN Taster Kante l/r Rad l/r Linienfolger l/r Laderaum Klappe
UART und Interrupts. Versuch Nr. 7
 Universität Koblenz Landau Name:..... Institut für Physik Vorname:..... Hardwarepraktikum für Informatiker Matr. Nr.:..... UART und Interrupts Versuch Nr. 7 Vorkenntnisse: Aufbau und Arbeitsweise einer
Universität Koblenz Landau Name:..... Institut für Physik Vorname:..... Hardwarepraktikum für Informatiker Matr. Nr.:..... UART und Interrupts Versuch Nr. 7 Vorkenntnisse: Aufbau und Arbeitsweise einer
Interrupt. Externe Interrupts 0 und 1
 Interrupt In vielen Applikationen müssen Mikrocontrollersysteme auf nicht vorhersehbare Ereignisse schnell reagieren (Echtzeitanwendungen). Diese Forderung erfüllt die Interruptschaltung. Ein durch ein
Interrupt In vielen Applikationen müssen Mikrocontrollersysteme auf nicht vorhersehbare Ereignisse schnell reagieren (Echtzeitanwendungen). Diese Forderung erfüllt die Interruptschaltung. Ein durch ein
Mikrocontroller - Tipps & Tricks
 Mikrocontroller - Tipps & Tricks Mikrocontroller vs. CPU CPU alles RAM, viel RAM Keine On-Chip Peripherie Viele Chips, Motherboard Mikrocontroller Wenig RAM, Flash im Chip mit drin Peripherie an Board
Mikrocontroller - Tipps & Tricks Mikrocontroller vs. CPU CPU alles RAM, viel RAM Keine On-Chip Peripherie Viele Chips, Motherboard Mikrocontroller Wenig RAM, Flash im Chip mit drin Peripherie an Board
Vorlesung HSMT (MRT - Teil) ab WS2011/2012
 ab WS2011/2012") HSMT / (MRT Teil) 27.10.11 Praktikum / Vorlesung / Dipl.Arbeiten Stephan Zielinski Horbacherstr. 116c Tel. 0241 6009 52302 Labor Goethestr, 52072 Aachen 0241 6009 52129 Büro Eupenerstr. Tel. 174173 Fax
HSMT / (MRT Teil) 27.10.11 Praktikum / Vorlesung / Dipl.Arbeiten Stephan Zielinski Horbacherstr. 116c Tel. 0241 6009 52302 Labor Goethestr, 52072 Aachen 0241 6009 52129 Büro Eupenerstr. Tel. 174173 Fax
Aufgabe 1: Transistor, Diode (ca. 15 Punkte)
") Studienschwerpunkt Mechatronik/Vertiefungsrichtung Fahrzeugmechatronik Seite 1 von 8 Hochschule München Fakultät 03 Zugelassene Hilfsmittel: alle eigenen, Taschenrechner Wintersemester 2018/19 Angewandte
Studienschwerpunkt Mechatronik/Vertiefungsrichtung Fahrzeugmechatronik Seite 1 von 8 Hochschule München Fakultät 03 Zugelassene Hilfsmittel: alle eigenen, Taschenrechner Wintersemester 2018/19 Angewandte
Inhaltsverzeichnis VII.
 \ 1 Grundlagen der Mikrocontrolier 1 1.1 Mikrocontroller-Familie ATtiny2313, ATtiny26und ATmega32 6 1.1.1 Merkmale des ATtiny2313, ATtiny26und ATmega32 8 1.1.2 Pinbelegung des ATtiny2313, ATtiny26 und
\ 1 Grundlagen der Mikrocontrolier 1 1.1 Mikrocontroller-Familie ATtiny2313, ATtiny26und ATmega32 6 1.1.1 Merkmale des ATtiny2313, ATtiny26und ATmega32 8 1.1.2 Pinbelegung des ATtiny2313, ATtiny26 und