Dynamic Maps: Von Karten zu Prozessen
|
|
|
- Jan Leonard Holzmann
- vor 8 Jahren
- Abrufe
Transkript
1 Dynamic Maps: Von Karten zu Prozessen Claus Brenner Institut für Kartographie und Geoinformatik Universität Hannover
2 Der Titel... Dynamic Maps: Von Karten zu Prozessen?
3 Der Titel... Dynamic Maps: Von Karten zu Prozessen Abbild, Abbildung, Karte, Kennfeld... Eine in die Ebene projizierte, maßstäblich verkleinerte, generalisierte und erläuterte Abbildung der Erdoberfläche oder eines Teils von ihr; auch anderer Himmelskörper oder des Weltraums. (Brockhaus)

4 Karten... Erfassung Bearbeitung Nutzung (Betrachtung) Produkt Hersteller Kunde
5 Karten im Web... Erfassung & Bearbeitung Aufbereitung Nutzung (Betrachtung) WMS, Web map server Hersteller Kunde
6 Features im Web... Erfassung & Bearbeitung & Aufbereitung Betrachtung WFS, Web feature server Weiterverarbeitung Hersteller Kunde
7 Wertschöpfungskette Erfassung & Bearbeitung & Aufbereitung Weiterverarbeitung 1 Weiterverarbeitung 2 Hersteller Kunde Hersteller Kunde
8 Wertschöpfungskette Erfassung & Bearbeitung & Aufbereitung Weiterverarbeitung 1 Weiterverarbeitung 2
9 Dienste-Raum Erfassung 1 Weiterverarbeitung 1 Weiterverarbeitung 2 Erfassung 2 Weiterverarbeitung n
10 Dynamische Komposition von Diensten Erfassung 1 Weiterverarbeitung 1 Weiterverarbeitung 2 Erfassung 2 Weiterverarbeitung n Dienstekomposition Anforderung Dienst 1 Dienst 2 Dienst 4 Dienst 3 Dienst 5 Dienst 6 Ergebnis
11 Dynamic Maps: Module der Dienstekette am Beispiel Generalisierung

12 Wiederholung: vom WMS zum WFS Erfassung & Bearbeitung Erfassung & Bearbeitung & Aufbereitung Aufbereitung WFS, Web feature server WMS, Web map server
13 Alternative Repräsentationen Was ist geschehen? Gängige Repräsentation: Karte / Pixelbild Ersetzt durch: Vektor-Repräsentation Vorteil: nicht nur Betrachtung möglich, sondern Wandlung in andere Datenformate Einfache geometrische Transformationen Komplexe räumliche Operationen Maschinelle Weiterverarbeitung Preis: Reichhaltige Beschreibung ist sehr komplex Definition aufwändig Interpretationsspielräume




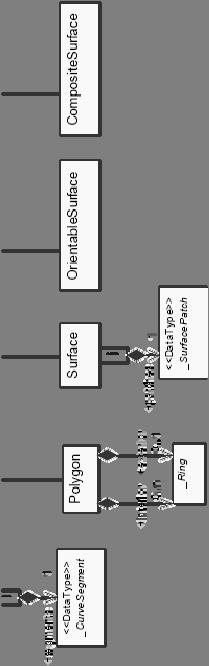
14 GML: Polygon
15 Ärger mit Polygonen! 1 4 Richtige Orientierung, falsche Orientierung Zwei Ringe, ein Ring 9 28 Peter van Oosterom, Wilko Quak and Theo Tijssen / TU Delft: Polygons: the unstable foundation of spatial modeling IBFI Seminar on Computational Cartography and Spatial Modelling 2003
16 Kartographische Generalisierung (2D, Polygone) Generalisierung s n+1 s n-1 s n s n-2 s n+2 P 5 g i P 3
17 Kartographische Generalisierung (2D, Polygone) P P n P i0 i1 P... g g 0 1 g k 1 P i k P m LOD i 0 LOD i 1 LOD i k
18 Kartographische Generalisierung (2D, Polygone) P P n P i0 i1 P... g g 0 1 g k 1 P i k P m
19 Kartographische Generalisierung (2D, Polygone) P m P i k g ik 1 1 P... 1 g k k 2 g 0 P i P n
20 Repräsentation von Generalisierungsoperationen POLY EPS NPR DV 0 DV 0 DV 0 MV MV MV EPS IV DV 1 MV MV EPS IV DV 4 MV MV

21 Prototyp: Strömende Generalisierung
22 Vollständige Automatisierung? Problem: Keine volle Automatisierung möglich, Nacharbeit Generalisierung Nacharbeit Lösungsansatz: Reichere Beschreibung! Vorarbeit Generalisierung Die angereicherte Beschreibung ist ein Mehrwert des Dienstanbieters (welcher nicht herausgegeben wird)
23 Beispiel: Generalisierung in 3D Original Abschneiden Füllen Letzter Schritt Frank Thiemann, ikg
24 Generalisierung durch inkrementelle Modellierung
25 Alternative Beschreibungsformen Explizite Hierarchien Container: Grid layout Formale Grammatiken Split grammars
26 Dynamic Maps: Kollaborative Erstellung von Maps
27 Wiederholung: Dienste-Raum Erfassung 1 Weiterverarbeitung 1 Weiterverarbeitung 2 Erfassung 2 Weiterverarbeitung n
28 Kollaborative Erstellung von Karten Bislang: definierter Kreis von Kartenherstellern / -verarbeitern Amtliche Karten Stadtpläne Karten für Fahrzeugnavigationssysteme Kann in Zukunft jeder Dienste anbieten? Qualitätssicherung? Kann mein Grundstücksnachbar die Katasterkarte editieren?
 Quelle: S.")
29 Ein Blick in die Robotik Robotik: SLAM (simultaneous localization and mapping) Eine Position Multipath Map Matching Partikelfilter Kooperation zur Positionsbestimmung Keine Karte im herkömmlichen Sinn! (fastslam-dmb-fastslam) Quelle: S. Thrun, Stanford


30 Map aus terrestrischen Laserscandaten Rohdaten Abgeleitete Repräsentation (NDT)


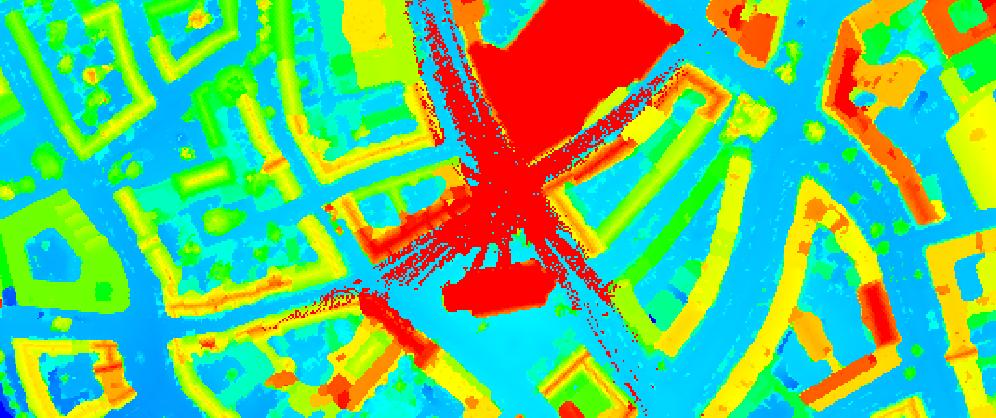
31 Map aus LIDAR Daten
 Quelle: S.")
32 Kollaborative Ortung (animation) Quelle: S. Thrun, Stanford
33 Sensoren in zukünftigen KFZ Radar (ACC) Kamera (Mono, Nachtsicht) Kamera (Stereo) Seitliches Radar Laserscanner Tiefenbildkamera
34 Kollaborative Erstellung von Maps
35 Kollaborative Erstellung von Maps Dynamic Map
36 Kollaborative Erstellung von Maps Dynamic Map Messung Information!
37 Kollaborative Erstellung von Maps Dynamic Map Wird Bestandteil der dynamic map upload!
38 Kollaborative Erstellung von Maps Dynamic Map Andere Teilnehmer profitieren von dieser Information! download
39 Kollaborative Erstellung von Maps Verkehrsteilnehmer übernimmt lokalen Kartenausschnitt... Dynamic Map
40 Kollaborative Erstellung von Maps...führt Berechnung durch... Dynamic Map
41 Kollaborative Erstellung von Maps... und hinterlässt den aktualisierten Ausschnitt Dynamic Map


42 Ansätze in der Fahrzeugindustrie Hier unter dem Aspekt der Fahrzeug-Fahrzeug Kommunikation Quelle: Car2Car Communication Consortium
43 Zusammenfassung Karte = Abbild der Wirklichkeit, für bestimmten Zweck Statische Karten Dynamic Maps Hersteller/Nutzer Wertschöpfungskette Datenbanken im Zentrum Dienste im Zentrum Dienste dynamische Verkettung von Diensten kollaborative Kartenerstellung Mehrwert besteht in Zusatzinformation Alternative Kartenrepräsentationen (maps) nötig Höherwertige Repräsentationsformen sind komplex Qualitätssicherung Auch die nächsten 125 Jahre werden spannend!
HAW Hamburg Anwendung 1 - Vortrag Andrej Rull
 HAW Hamburg Anwendung 1 - Vortrag Andrej Rull 02122008 1 Gliederung o Motivation o Der Anwendungsfall o Das SLAM Problem o Lösungsansätze und Algorithmen o Zusammenfassung o Ausblick auf AW2 2 Motivation
HAW Hamburg Anwendung 1 - Vortrag Andrej Rull 02122008 1 Gliederung o Motivation o Der Anwendungsfall o Das SLAM Problem o Lösungsansätze und Algorithmen o Zusammenfassung o Ausblick auf AW2 2 Motivation
Visuelle Information zur robusten Zuordnung von Landmarken für die Navigation mobiler Roboter
 Visuelle Information zur robusten Zuordnung von Landmaren für die Navigation mobiler Roboter Forum Bildverarbeitung 2010 Thomas Emter Thomas Ulrich Loalisierung Herausforderungen Relative Sensoren (Dead
Visuelle Information zur robusten Zuordnung von Landmaren für die Navigation mobiler Roboter Forum Bildverarbeitung 2010 Thomas Emter Thomas Ulrich Loalisierung Herausforderungen Relative Sensoren (Dead
Lernmodul 2 Modelle des Raumes
 Folie 1 von 21 Lernmodul 2 Modelle des Raumes Bildnachweis: www. tagesschau.de Folie 2 von 21 Modelle des Raumes Übersicht Motivation Was ist Raum? Formalismus und Invarianz Metrischer Raum/Euklidischer
Folie 1 von 21 Lernmodul 2 Modelle des Raumes Bildnachweis: www. tagesschau.de Folie 2 von 21 Modelle des Raumes Übersicht Motivation Was ist Raum? Formalismus und Invarianz Metrischer Raum/Euklidischer
Neues von esri esri Anwendertreffen Küste
 Neues von esri esri Anwendertreffen Küste Daniela Wingert und Nina Pudritz Esri Deutschland GmbH 08. Mai 2014, Ratzeburg Agenda + Neues von Esri + ArcGIS Plattform > ArcGIS for Desktop > ArcGIS Online
Neues von esri esri Anwendertreffen Küste Daniela Wingert und Nina Pudritz Esri Deutschland GmbH 08. Mai 2014, Ratzeburg Agenda + Neues von Esri + ArcGIS Plattform > ArcGIS for Desktop > ArcGIS Online
Probabilistische Methoden für die Roboter-Navigation am Beispiel eines autonomen Shopping- Assistenten. Von Christof Schröter
 Probabilistische Methoden für die Roboter-Navigation am Beispiel eines autonomen Shopping- Assistenten Von Christof Schröter Universitätsverlag Ilmenau 2009 Impressum Bibliografische Information der Deutschen
Probabilistische Methoden für die Roboter-Navigation am Beispiel eines autonomen Shopping- Assistenten Von Christof Schröter Universitätsverlag Ilmenau 2009 Impressum Bibliografische Information der Deutschen
Moderne Kartographie Technologien und Implikationen
 Moderne Kartographie Technologien und Implikationen Georg Gartner Feldkirch, November 2010 Kartographie ist in! Ist Kartographie in? Agenda Forschungsgruppe Kartographie Technologie Push Implikationen
Moderne Kartographie Technologien und Implikationen Georg Gartner Feldkirch, November 2010 Kartographie ist in! Ist Kartographie in? Agenda Forschungsgruppe Kartographie Technologie Push Implikationen
Pilotprojekt XPlanung LK Harz
 Pilotprojekt XPlanung LK Harz + Ausgangssituation-Anforderungen an die Software + Ist-Stand der technischen Realisierung + wichtige Abläufe und Funktionen + zu erwartende Effekte + praktische Vorführung
Pilotprojekt XPlanung LK Harz + Ausgangssituation-Anforderungen an die Software + Ist-Stand der technischen Realisierung + wichtige Abläufe und Funktionen + zu erwartende Effekte + praktische Vorführung
Geodatenbankunterstützung für die geotechnische Bewertung von Massenbewegungen mit Hilfe eines Web Geological Feature Server (WGFS)
") Geodatenbankunterstützung für die geotechnische Bewertung von Massenbewegungen mit Hilfe eines Web Geological Feature Server (WGFS) Björn Broscheit Universität Osnabrück Institut für Geoinformatik und
Geodatenbankunterstützung für die geotechnische Bewertung von Massenbewegungen mit Hilfe eines Web Geological Feature Server (WGFS) Björn Broscheit Universität Osnabrück Institut für Geoinformatik und
LiDAR Mobile Mapping
 Institut für Kartographie und Geoinformatik Leibniz Universität Hannover LiDAR Mobile Mapping Visualisierung, Vermessung, Fahrerassistenz [email protected] IKG Erfassungsfahrzeug Riegl
Institut für Kartographie und Geoinformatik Leibniz Universität Hannover LiDAR Mobile Mapping Visualisierung, Vermessung, Fahrerassistenz [email protected] IKG Erfassungsfahrzeug Riegl
Automatisiert Kartenserien erstellen Daniel Fuchs
 13. ArcView-Anwendertreffen 2011 Automatisiert Kartenserien erstellen Daniel Fuchs Was sind Mit automatisierten Kartenserien wird ein bestimmtes Kartenlayout für mehrere Planausschnitte nacheinander gedruckt
13. ArcView-Anwendertreffen 2011 Automatisiert Kartenserien erstellen Daniel Fuchs Was sind Mit automatisierten Kartenserien wird ein bestimmtes Kartenlayout für mehrere Planausschnitte nacheinander gedruckt
Quadrocopters and it s Applications: Overview of State of the Art Techniques
 : Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: [email protected] Date:
: Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: [email protected] Date:
3D Umfeldrekonstruktion über Structure from Motion
 A HELLA-Group Company 3D Umfeldrekonstruktion über Structure from Motion Dr. Ralph Hänsel, Hella Aglaia Mobile Vision GmbH 11.12.2015 Symposium Beuth Hochschule Geometrische Modellierung und Computational
A HELLA-Group Company 3D Umfeldrekonstruktion über Structure from Motion Dr. Ralph Hänsel, Hella Aglaia Mobile Vision GmbH 11.12.2015 Symposium Beuth Hochschule Geometrische Modellierung und Computational
Geoinformation I Datenmodellierung
 Seite 1 von 61 Geoinformation I Datenmodellierung Seite 2 von 61 Datenmodellierung Übersicht Datenverwaltung und Datenbanken objektorientierte Abbildung der Realität Grundlagen der Objektorientierung Darstellung
Seite 1 von 61 Geoinformation I Datenmodellierung Seite 2 von 61 Datenmodellierung Übersicht Datenverwaltung und Datenbanken objektorientierte Abbildung der Realität Grundlagen der Objektorientierung Darstellung
Neue Entwicklungen bei GIS-Servern
 Neue Entwicklungen bei GIS-Servern - Jenseits von Web Mapping - 41. Sitzung der Arbeitsgruppe Automation in der Kartographie (AgA) Hamburg, 21./22. September Dr. Peter Ladstätter, ESRI Geoinformatik Neue
Neue Entwicklungen bei GIS-Servern - Jenseits von Web Mapping - 41. Sitzung der Arbeitsgruppe Automation in der Kartographie (AgA) Hamburg, 21./22. September Dr. Peter Ladstätter, ESRI Geoinformatik Neue
K A R T E N S E R V E R
 November 2007 NEWSLETTER - 2 - Das Landesamt für Bergbau, Energie und Geologie (LBEG) stellt Ihnen im Internet Daten aus den Bereichen Altlasten, Baugrund, Bergbau, Bodenkunde, Geologie, Grundwasser und
November 2007 NEWSLETTER - 2 - Das Landesamt für Bergbau, Energie und Geologie (LBEG) stellt Ihnen im Internet Daten aus den Bereichen Altlasten, Baugrund, Bergbau, Bodenkunde, Geologie, Grundwasser und
Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform. Thorsten Jost INF-M2 AW1 Sommersemester
 Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform Thorsten Jost INF-M2 AW1 Sommersemester 2008 Agenda Motivation Feature Detection Beispiele Posenbestimmung in Räumen
Navigation anhand natürlicher Landmarken mit Hilfe der Scale Invariant Feature Transform Thorsten Jost INF-M2 AW1 Sommersemester 2008 Agenda Motivation Feature Detection Beispiele Posenbestimmung in Räumen
Amtlicher Stadtplan Essen. Dr. Frank Knospe Amt für Geoinformation, Vermessung und Kataster der Stadt Essen
 Amtlicher Stadtplan Essen Dr. Frank Knospe Amt für Geoinformation, Vermessung und Kataster der Stadt Essen Der Stadtplan Im Geo-Netzwerk metropoleruhr Vektor-Daten aus der RVR Datenbank Automatische Beschriftung
Amtlicher Stadtplan Essen Dr. Frank Knospe Amt für Geoinformation, Vermessung und Kataster der Stadt Essen Der Stadtplan Im Geo-Netzwerk metropoleruhr Vektor-Daten aus der RVR Datenbank Automatische Beschriftung
Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren.
 Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren www.joanneum.at/digital Wozu braucht mein Auto eine Karte? 2 Mensch als Fahrer: Karte wird zum Navigieren
Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren www.joanneum.at/digital Wozu braucht mein Auto eine Karte? 2 Mensch als Fahrer: Karte wird zum Navigieren
3D-Stadt- u. Landschaftsmodelle (für das WWW) am Bsp. Projekt 3D Stadtmodell Heidelberg
 am Bsp. Projekt 3D Stadtmodell Heidelberg") 3D-Stadt- u. Landschaftsmodelle (für das WWW) am Bsp. Projekt 3D Stadtmodell Heidelberg Weiterentwicklung von Internet-tauglichen 3D-Stadt-u. Landschaftsmodellen und Software für deren Verwaltung, Erzeugung
3D-Stadt- u. Landschaftsmodelle (für das WWW) am Bsp. Projekt 3D Stadtmodell Heidelberg Weiterentwicklung von Internet-tauglichen 3D-Stadt-u. Landschaftsmodellen und Software für deren Verwaltung, Erzeugung
ALKIS- und Dienst-Nutzung mit Mapbender
 ALKIS- und Dienst-Nutzung mit Mapbender Olaf Knopp WhereGroup Einführung in Mapbender Aufbau / Architektur Funktionen Lizenz Grundlagen und Standards OSGeo Open Source Geospatial Foundation OGC Open Geospatial
ALKIS- und Dienst-Nutzung mit Mapbender Olaf Knopp WhereGroup Einführung in Mapbender Aufbau / Architektur Funktionen Lizenz Grundlagen und Standards OSGeo Open Source Geospatial Foundation OGC Open Geospatial
Arbeitsgruppe Automation in Kartographie, Photogrammetrie und GIS
 Mitteilungen des Bundesamtes für Kartographie und Geodäsie Band 47 Arbeitsgruppe Automation in Kartographie, Photogrammetrie und GIS Tagung 2010 Verlag des Bundesamtes für Kartographie und Geodäsie Frankfurt
Mitteilungen des Bundesamtes für Kartographie und Geodäsie Band 47 Arbeitsgruppe Automation in Kartographie, Photogrammetrie und GIS Tagung 2010 Verlag des Bundesamtes für Kartographie und Geodäsie Frankfurt
INSPIRE Datenüberführung leicht gemacht
 INSPIRE Datenüberführung leicht gemacht Hannover, 26. Juni 2018 Benjamin Quest con terra GmbH con terra - Systemintegrator für Geo-IT-Lösungen Gründung 1993, Firmensitz in Münster 135 Mitarbeiter Geo-IT-Lösungen
INSPIRE Datenüberführung leicht gemacht Hannover, 26. Juni 2018 Benjamin Quest con terra GmbH con terra - Systemintegrator für Geo-IT-Lösungen Gründung 1993, Firmensitz in Münster 135 Mitarbeiter Geo-IT-Lösungen
Publikation OGC Metadateneditor mit gvsig
 INTERGEO 2008 Publikation OGC Metadateneditor mit gvsig gvsig als Client einer GDI Remote- Zugriff auf verschiedene OGC- Dienste (WMS, WFS, WCS, Catalog & Gazetter- Services) Publikation OGC: Veröffentlichung
INTERGEO 2008 Publikation OGC Metadateneditor mit gvsig gvsig als Client einer GDI Remote- Zugriff auf verschiedene OGC- Dienste (WMS, WFS, WCS, Catalog & Gazetter- Services) Publikation OGC: Veröffentlichung
Einführung zum OGC Web Processing Service
 30. September 2008 Gliederung 1 2 3 4 Zur Person Zur Person Zur Spezifikation wiss. Mitarbeiter AG GIS Geographisches Institut, Universität Bonn: aggis.uni-bonn.de derzeit beschäftigt im BMBF-Projekt GDI-Grid:
30. September 2008 Gliederung 1 2 3 4 Zur Person Zur Person Zur Spezifikation wiss. Mitarbeiter AG GIS Geographisches Institut, Universität Bonn: aggis.uni-bonn.de derzeit beschäftigt im BMBF-Projekt GDI-Grid:
SLAM. Simultaneous Localization and Mapping. KogSys-Sem-M2: Reading Club - SLAM - Andreas Habermann
 SLAM Simultaneous Localization and Mapping KogSys-Sem-M2: Reading Club - SLAM - Andreas Habermann Simultaneous Localization And Mapping SLAM Problematik SLAM Arten SLAM Methoden: (E)KF SLAM GraphSLAM Fast
SLAM Simultaneous Localization and Mapping KogSys-Sem-M2: Reading Club - SLAM - Andreas Habermann Simultaneous Localization And Mapping SLAM Problematik SLAM Arten SLAM Methoden: (E)KF SLAM GraphSLAM Fast
Kartenerstellung und Navigation
 Kartenerstellung und Navigation zur Positionserkennung autonomer Fahrzeuge von Ilona Blanck 27. Mai 2008 im Rahmen der Anwendungen I Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik
Kartenerstellung und Navigation zur Positionserkennung autonomer Fahrzeuge von Ilona Blanck 27. Mai 2008 im Rahmen der Anwendungen I Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik
Landmarkenbasierte Kartierung und Lokalisierung
 Landmarkenbasierte Kartierung und Lokalisierung Inhalt 1. Kartierung Wiederholung Probleme Vergleich 2. Lokalisierung Wiederholung Fortsetzung Partikelfilter Zusammenfassung der Vorgehensweise Quellen
Landmarkenbasierte Kartierung und Lokalisierung Inhalt 1. Kartierung Wiederholung Probleme Vergleich 2. Lokalisierung Wiederholung Fortsetzung Partikelfilter Zusammenfassung der Vorgehensweise Quellen
Umsetzung eines Online-SLAM-Verfahrens auf der Roboterplattform VolksBot-Lab
 Umsetzung eines Online-SLAM-Verfahrens auf der Roboterplattform VolksBot-Lab Bachelorarbeit Frank Engelhardt Institut für Verteilte Systeme Gliederung Motivation Problemexposition Lösungsverfahren Zeitverhalten
Umsetzung eines Online-SLAM-Verfahrens auf der Roboterplattform VolksBot-Lab Bachelorarbeit Frank Engelhardt Institut für Verteilte Systeme Gliederung Motivation Problemexposition Lösungsverfahren Zeitverhalten
Algorithmischer Ansatz nach David Marr
 Universität Konstanz Algorithmischer Ansatz nach David Marr 19. Mai 2005 Algorithmischer Ansatz Computational theory Was ist das Ziel der Berechnung? Abstrakte, aufgabenorientierte Definition kognitiver
Universität Konstanz Algorithmischer Ansatz nach David Marr 19. Mai 2005 Algorithmischer Ansatz Computational theory Was ist das Ziel der Berechnung? Abstrakte, aufgabenorientierte Definition kognitiver
Landesweite Web Services GDI NRW auf Basis von CityGML
 Landesweite Web Services GDI NRW auf Basis von CityGML Institut für Geodäsie und Geoinformation Abteilung Geoinformation Universität Bonn AgA-Tagung, 22.9.2008 Landesweite Web Services & CityGML Landesstraßen
Landesweite Web Services GDI NRW auf Basis von CityGML Institut für Geodäsie und Geoinformation Abteilung Geoinformation Universität Bonn AgA-Tagung, 22.9.2008 Landesweite Web Services & CityGML Landesstraßen
Visualisierung von Geodaten
 Seminar: mobilegis Visualisierung von Geodaten Maria Selzer Agenda Einführung Datenformate Maps APIs Virtuelle Globen Zusammenfassung Einführung Visualisierung: graphische bzw. visuelle Darstellung von
Seminar: mobilegis Visualisierung von Geodaten Maria Selzer Agenda Einführung Datenformate Maps APIs Virtuelle Globen Zusammenfassung Einführung Visualisierung: graphische bzw. visuelle Darstellung von
CSGIS Gbr Canalejo & Schönbuchner GIS. Der VfS Viewer: Ein auf Open Source basiertes Web GIS zur Information von Waldbesitzern in Bayern
 Der VfS Viewer: Ein auf Open Source basiertes Web GIS zur Information von Waldbesitzern in Bayern Gliederung Präsentation VfS Von analogen Standortkarten zu digitalen Daten Einleitung zum forstlichen Informationssystem
Der VfS Viewer: Ein auf Open Source basiertes Web GIS zur Information von Waldbesitzern in Bayern Gliederung Präsentation VfS Von analogen Standortkarten zu digitalen Daten Einleitung zum forstlichen Informationssystem
HAW Hamburg Anwendung 2 - Vortrag Andrej Rull
 HAW Hamburg Anwendung 2 - Vortrag Andrej Rull 25062009 1 Gliederung o Motivation o Das SLAM Problem o Related Works ATLAS Framework o Abgrenzung der eigenen o Zusammenfassung 2 Motivation Wofür überhaupt
HAW Hamburg Anwendung 2 - Vortrag Andrej Rull 25062009 1 Gliederung o Motivation o Das SLAM Problem o Related Works ATLAS Framework o Abgrenzung der eigenen o Zusammenfassung 2 Motivation Wofür überhaupt
Open Data nutzen und bereitstellen über die ArcGIS Plattform
 Open Data nutzen und bereitstellen über die ArcGIS Plattform Stefan Herrmann Esri Deutschland GmbH 27 Januar, Dresden INSPIRE + Europäische Geodateninfrastruktur der Verwaltungen + Einheitliche Beschreibung
Open Data nutzen und bereitstellen über die ArcGIS Plattform Stefan Herrmann Esri Deutschland GmbH 27 Januar, Dresden INSPIRE + Europäische Geodateninfrastruktur der Verwaltungen + Einheitliche Beschreibung
RatSLAM. Torben Becker. 24. Mai HAW Hamburg
 HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
Dokumentation. KFZ-Kennzeichen 1: KFZ250. Stand: Seite 1 von 6
 Dokumentation KFZ-Kennzeichen 1:250 000 Stand: 23.11.2018 Seite 1 von 6 Inhaltsverzeichnis 1 Übersicht über den Datenbestand 3 2 Beschreibung des Datenbestandes und der Online-Dienste 4 Allgemeines 4 Beschreibung
Dokumentation KFZ-Kennzeichen 1:250 000 Stand: 23.11.2018 Seite 1 von 6 Inhaltsverzeichnis 1 Übersicht über den Datenbestand 3 2 Beschreibung des Datenbestandes und der Online-Dienste 4 Allgemeines 4 Beschreibung
2. Gismo-Anwendertreffen. BSH Hamburg, Dipl.-Ing. (FH) Michael van Zoest smile consult GmbH. Überblick - Datenbankfunktionalität
 Michael van Zoest smile consult GmbH. Überblick - Datenbankfunktionalität") 2. Gismo-Anwendertreffen BSH Hamburg, 02.03.2017 Dipl.-Ing. (FH) Michael van Zoest smile consult GmbH Stand: Anwendungsmöglichkeiten Archivierung Datenhaltung Visualisierung großer Datenmengen Raum-Zeit-Interpolation
2. Gismo-Anwendertreffen BSH Hamburg, 02.03.2017 Dipl.-Ing. (FH) Michael van Zoest smile consult GmbH Stand: Anwendungsmöglichkeiten Archivierung Datenhaltung Visualisierung großer Datenmengen Raum-Zeit-Interpolation
Studentenprojekte mit GeoMedia 6.0 Interoperable Datennutzung mit GeoMedia
 Prof. Dipl.-Ing. Rainer Kettemann Labor für Geoinformatik Studentenprojekte mit GeoMedia 6.0 Interoperable Datennutzung mit GeoMedia Hochschule für Technik Stuttgart Fakultät Vermessung, Mathematik und
Prof. Dipl.-Ing. Rainer Kettemann Labor für Geoinformatik Studentenprojekte mit GeoMedia 6.0 Interoperable Datennutzung mit GeoMedia Hochschule für Technik Stuttgart Fakultät Vermessung, Mathematik und
Kapitel 1 - Einführung
 Vorlesung Graphische Datenverarbeitung Kapitel 1 - Einführung Prof. Dr.-Ing. Wolfgang Reinhardt AGIS/INF4 http://www.agis.unibw-muenchen.de UniBw München Überblick Kap. 1: Einführung (Überblick, Begriffe,
Vorlesung Graphische Datenverarbeitung Kapitel 1 - Einführung Prof. Dr.-Ing. Wolfgang Reinhardt AGIS/INF4 http://www.agis.unibw-muenchen.de UniBw München Überblick Kap. 1: Einführung (Überblick, Begriffe,
Datenmanagement in AufMod
 Datenmanagement in AufMod Aufbau integrierter Modellsysteme zur langfristigen Analyse der Morphodynamik in der Deutschen Bucht Deutsches Schifffahrtsmuseum, Bremerhaven 28. November 2012 KFKI-Kolloquium
Datenmanagement in AufMod Aufbau integrierter Modellsysteme zur langfristigen Analyse der Morphodynamik in der Deutschen Bucht Deutsches Schifffahrtsmuseum, Bremerhaven 28. November 2012 KFKI-Kolloquium
Konzeption einer interkommunalen GIS-Strategie Dr.-Ing. Christoph Averdung
 Konzeption einer interkommunalen GIS-Strategie www.cpa-systems.de Dr.-Ing. Christoph Averdung [email protected] CPA Systems GmbH 2008 Das Unternehmen Unternehmen: Gründung und strategische Ausrichtung
Konzeption einer interkommunalen GIS-Strategie www.cpa-systems.de Dr.-Ing. Christoph Averdung [email protected] CPA Systems GmbH 2008 Das Unternehmen Unternehmen: Gründung und strategische Ausrichtung
9 SLAM Simultaneous Localization and Mapping
 9 SLAM Simultaneous Localization and Mapping Einleitung eines der aktivsten Forschungsgebiete innerhalb der Robotik Roboterlokalisierung bei gegebener Karte (Kap. 8 und Karte aus Sensordaten bei bekannter
9 SLAM Simultaneous Localization and Mapping Einleitung eines der aktivsten Forschungsgebiete innerhalb der Robotik Roboterlokalisierung bei gegebener Karte (Kap. 8 und Karte aus Sensordaten bei bekannter
Fast-SLAM: Synchrone Lokalisierung und Kartenerstellung mit einem Partikel-Filter
 Fast-SLAM: Synchrone Lokalisierung und Kartenerstellung mit einem Partikel-Filter! Landmarkenbasiertes Fast-SLAM! Gitterbasiertes Fast-Slam! Optimierungen Prof. Dr. O. Bittel, HTWG Konstanz Autonome Roboter
Fast-SLAM: Synchrone Lokalisierung und Kartenerstellung mit einem Partikel-Filter! Landmarkenbasiertes Fast-SLAM! Gitterbasiertes Fast-Slam! Optimierungen Prof. Dr. O. Bittel, HTWG Konstanz Autonome Roboter
Aufbau der INSPIRE-Dienste des Landes
 Aktueller Stand und Ausblick 1 Agenda IT.NRW Aufgaben und Ziele Zeitplan, Annex Themen, Architektur aktuelle Herausforderungen GIS Infrastruktur Integration von Kernaufgaben und Workflow Datenmodelle Erweiterungen
Aktueller Stand und Ausblick 1 Agenda IT.NRW Aufgaben und Ziele Zeitplan, Annex Themen, Architektur aktuelle Herausforderungen GIS Infrastruktur Integration von Kernaufgaben und Workflow Datenmodelle Erweiterungen
Fusion von Geodaten unterschiedlicher Quellen in Geodateninfrastrukturen am Beispiel von ATKIS und OpenStreetMap
 Fakultät Forst-, Geo- und Hydrowissenschaften Professur für Geoinformationssysteme Fusion von Geodaten unterschiedlicher Quellen in Geodateninfrastrukturen am Beispiel von ATKIS und OpenStreetMap Stefan
Fakultät Forst-, Geo- und Hydrowissenschaften Professur für Geoinformationssysteme Fusion von Geodaten unterschiedlicher Quellen in Geodateninfrastrukturen am Beispiel von ATKIS und OpenStreetMap Stefan
UPNS4D+: Selektive Gewinnung geringhaltiger Lagerstätten durch Untertagerobotik
 UPNS4D+: Selektive Gewinnung geringhaltiger Lagerstätten durch Untertagerobotik Dr. Matthias Rabel, indurad GmbH Koordinator: Dr. Reik Winkel, indurad GmbH Förderkennzeichen: 033R126A Verbundpartner XGraphic
UPNS4D+: Selektive Gewinnung geringhaltiger Lagerstätten durch Untertagerobotik Dr. Matthias Rabel, indurad GmbH Koordinator: Dr. Reik Winkel, indurad GmbH Förderkennzeichen: 033R126A Verbundpartner XGraphic
ArcGIS 9.0 Highlights oder was gibt s neues von ESRI? Katrin Twiehaus ESRI Niederlassung Hannover
 oder was gibt s neues von ESRI? Katrin Twiehaus ESRI Niederlassung Hannover ArcGIS 9.0 - Wesentliche Highlights Geodatenverarbeitung Maplex Geodatabase und Raster Standards Diverses Geodatabase Globale
oder was gibt s neues von ESRI? Katrin Twiehaus ESRI Niederlassung Hannover ArcGIS 9.0 - Wesentliche Highlights Geodatenverarbeitung Maplex Geodatabase und Raster Standards Diverses Geodatabase Globale
3D-Innenraummodellierung auf der Basis eines geometrisch-topologischen Datenmodells
 3D-Innenraummodellierung auf der Basis eines geometrisch-topologischen Datenmodells Catia Real Ehrlich, Jörg Blankenbach 47. Sitzung der AgA, 27. September 2010 Gliederung Motivation Problemstellung Workflow
3D-Innenraummodellierung auf der Basis eines geometrisch-topologischen Datenmodells Catia Real Ehrlich, Jörg Blankenbach 47. Sitzung der AgA, 27. September 2010 Gliederung Motivation Problemstellung Workflow
Empfehlung der Arbeitsgruppe SPW 2.0
 Anforderungskatalog / Kriterien Datenquellen Kartographisches System Untersuchungen / Tests Bewertung der Untersuchungsergebnisse Empfehlung Johannes Terwyen und Michael Wieczorek 1 Anforderungskatalog
Anforderungskatalog / Kriterien Datenquellen Kartographisches System Untersuchungen / Tests Bewertung der Untersuchungsergebnisse Empfehlung Johannes Terwyen und Michael Wieczorek 1 Anforderungskatalog
Automatisierte Erstellung von Stadtplänen auf Basis amtlicher Geodaten. Christian Treutwein, IP SYSCON GmbH InfoVerm München,
 Automatisierte Erstellung von Stadtplänen auf Basis amtlicher Geodaten Christian Treutwein, IP SYSCON GmbH InfoVerm München, 10.04.2019 Gegründet 1995 in Celle Hauptsitz in Hannover, Niederlassungen in
Automatisierte Erstellung von Stadtplänen auf Basis amtlicher Geodaten Christian Treutwein, IP SYSCON GmbH InfoVerm München, 10.04.2019 Gegründet 1995 in Celle Hauptsitz in Hannover, Niederlassungen in
Räumliche Visualisierung und GIS- gestützte Auswertungen des Wirtschaftsverkehrs von Berlin (Deutschland)
") Räumliche Visualisierung und GIS- gestützte Auswertungen des Wirtschaftsverkehrs von Berlin (Deutschland) Datengrundlage: KID 2002, Kraftfahrzeugverkehr In Deutschland infas GEOdaten, Strukturdaten Dipl.-Geogr.
Räumliche Visualisierung und GIS- gestützte Auswertungen des Wirtschaftsverkehrs von Berlin (Deutschland) Datengrundlage: KID 2002, Kraftfahrzeugverkehr In Deutschland infas GEOdaten, Strukturdaten Dipl.-Geogr.
Inhaltsverzeichnis. Vorwort Einleitung CityGML als OGC-Norm Grundlagen Das Objektmodell von CityGML...
 Vorwort... 5 1 Einleitung... 13 2 CityGML als OGC-Norm... 15 2.1 Das Open Geospatial Consortium... 15 2.2 Kurze Geschichte von CityGML... 16 2.3 GML als Basis... 17 2.4 Normen ringsherum... 18 2.5 Alternativen
Vorwort... 5 1 Einleitung... 13 2 CityGML als OGC-Norm... 15 2.1 Das Open Geospatial Consortium... 15 2.2 Kurze Geschichte von CityGML... 16 2.3 GML als Basis... 17 2.4 Normen ringsherum... 18 2.5 Alternativen
Daum (2011, S. 23) RÄUME ERFORSCHEN
 RÄUME ERFORSCHEN") https://www.slideserve.com/adonia/the-university-s-role-in-fostering-spatial-citizenship Daum (2011, S. 23) RÄUME ERFORSCHEN Begriffe Kartieren Kartographie Subjektive Kartographie Spatial Citizenship
https://www.slideserve.com/adonia/the-university-s-role-in-fostering-spatial-citizenship Daum (2011, S. 23) RÄUME ERFORSCHEN Begriffe Kartieren Kartographie Subjektive Kartographie Spatial Citizenship
Interoperable GIS-Analysen in 3D-Geodateninfrastrukturen
 Interoperable GIS-Analysen in 3D-Geodateninfrastrukturen Prof. Dr. Alexander Zipf Lehrstuhl Geoinformatik Geographisches Institut Universität Heidelberg [email protected] www.geog.uni-heidelberg.de/giscience.html
Interoperable GIS-Analysen in 3D-Geodateninfrastrukturen Prof. Dr. Alexander Zipf Lehrstuhl Geoinformatik Geographisches Institut Universität Heidelberg [email protected] www.geog.uni-heidelberg.de/giscience.html
Didaktisch-Methodische Konzepte für den Einsatz von GIS im Unterricht. Aileen Herrmann
 Didaktisch-Methodische Konzepte für den Einsatz von GIS im Unterricht Aileen Herrmann Gliederung 1. 2. 3. 4. WebGIS Desktop GIS Vom WebGIS zum Desktop GIS Drei Stufen auf dem Weg zur erfolgreichen GIS
Didaktisch-Methodische Konzepte für den Einsatz von GIS im Unterricht Aileen Herrmann Gliederung 1. 2. 3. 4. WebGIS Desktop GIS Vom WebGIS zum Desktop GIS Drei Stufen auf dem Weg zur erfolgreichen GIS
OpenStreetMap-3D Erweiterung von Geodateninfrastrukturen um 3D.
 OpenStreetMap-3D Erweiterung von Geodateninfrastrukturen um 3D www.osm-3d.org Prof. Dr. Alexander Zipf Lehrstuhl Geoinformatik Geographisches Institut Universität Heidelberg [email protected]
OpenStreetMap-3D Erweiterung von Geodateninfrastrukturen um 3D www.osm-3d.org Prof. Dr. Alexander Zipf Lehrstuhl Geoinformatik Geographisches Institut Universität Heidelberg [email protected]
Aktuelle Trends in der Entwicklung von CityGML3.0
 Platzhalter für Bild, Bild auf Titelfolie hinter das Logo einsetzen Aktuelle Trends in der Entwicklung von CityGML3.0 Marc-O. Löwner Joachim Benner & Gerhard Gröger Technische Universität Braunschweig
Platzhalter für Bild, Bild auf Titelfolie hinter das Logo einsetzen Aktuelle Trends in der Entwicklung von CityGML3.0 Marc-O. Löwner Joachim Benner & Gerhard Gröger Technische Universität Braunschweig
Scene Reconstruction with Multiple View Geometry
 Scene Reconstruction with Multiple View Geometry Anwendungen 2 16.06.2010 Nikolaus Rusitska [email protected] Inhalt Rückblick Techniken Related Work Fazit 1 Rückblick Techniken Related Work Fazit
Scene Reconstruction with Multiple View Geometry Anwendungen 2 16.06.2010 Nikolaus Rusitska [email protected] Inhalt Rückblick Techniken Related Work Fazit 1 Rückblick Techniken Related Work Fazit
Nutzung und Bereitstellung von OGC-Diensten in ArcGIS 9.3
 Nutzung und Bereitstellung von OGC-Diensten in ArcGIS 9.3 Matthias Schenker ESRI Geoinformatik AG 2007 ESRI Geoinformatik GmbH Unterstützung von OGC-Diensten mit ArcGIS Server 9.3 WMS Web Mapping Service
Nutzung und Bereitstellung von OGC-Diensten in ArcGIS 9.3 Matthias Schenker ESRI Geoinformatik AG 2007 ESRI Geoinformatik GmbH Unterstützung von OGC-Diensten mit ArcGIS Server 9.3 WMS Web Mapping Service
Prof. Dipl.-Ing. Rainer Kettemann Dipl.-Ing.(FH) Jörg Hammerl
 Jörg Hammerl") Prof. Dipl.-Ing. Rainer Kettemann Dipl.-Ing.(FH) Jörg Hammerl Online-Zugriff auf Geobasis- und Geofachdaten aus Baden- Württemberg mit dem ArcGIS 9.x Hochschule für Technik Stuttgart Fakultät Vermessung,
Prof. Dipl.-Ing. Rainer Kettemann Dipl.-Ing.(FH) Jörg Hammerl Online-Zugriff auf Geobasis- und Geofachdaten aus Baden- Württemberg mit dem ArcGIS 9.x Hochschule für Technik Stuttgart Fakultät Vermessung,
EOxServer & MapServer. Open Source Lösungen für Erdbeobachtungsdaten
 EOxServer & MapServer Open Source Lösungen für Erdbeobachtungsdaten Wer ist EOX? (Was tun wir so & für wen?) Erdbeobachtung 101 Ofene Standards für Geoinformations Systeme MapServer EOxServer Wer ist
EOxServer & MapServer Open Source Lösungen für Erdbeobachtungsdaten Wer ist EOX? (Was tun wir so & für wen?) Erdbeobachtung 101 Ofene Standards für Geoinformations Systeme MapServer EOxServer Wer ist
(Punktnr.) x-wert y-wert (z-wert) ( ) ( )
 x-wert y-wert (z-wert) ( ) ( )") Vektordaten Das Speichern bzw. Verarbeiten räumlicher Informationen als Vektordaten entspricht dem naheliegenden Muster einer Koordinatenliste die Dateien sind im Wesentlichen so aufgebaut: (Punktnr.)
Vektordaten Das Speichern bzw. Verarbeiten räumlicher Informationen als Vektordaten entspricht dem naheliegenden Muster einer Koordinatenliste die Dateien sind im Wesentlichen so aufgebaut: (Punktnr.)
Kartographische Visualisierung
 Kartographische Visualisierung Kartenmodellierung Modellierung von Karten Ziel der Kartenmodellierung: Geodaten angemessen abbilden (repräsentieren) Informationen mit der Karte vermitteln (präsentieren).
Kartographische Visualisierung Kartenmodellierung Modellierung von Karten Ziel der Kartenmodellierung: Geodaten angemessen abbilden (repräsentieren) Informationen mit der Karte vermitteln (präsentieren).
Geodaten in Nutzung Oracle Spatial + Oracle MAPS + APEX
 Geodaten in Nutzung Oracle Spatial + Oracle MAPS + APEX DOAG Regionalgruppe Berlin am 4. Juni 2008 Karin Patenge Systemberaterin Oracle Deutschland GmbH [email protected] Agenda
Geodaten in Nutzung Oracle Spatial + Oracle MAPS + APEX DOAG Regionalgruppe Berlin am 4. Juni 2008 Karin Patenge Systemberaterin Oracle Deutschland GmbH [email protected] Agenda
Informationsmanagement im Tourismus
 Vorlesung Prof. Dr. Markus Landvogt 14 Geoinformationssysteme im Tourismus 14 1 Geoinformationssysteme 1. Einführung und Definitionen 2. Karten-Informationssysteme 3. Technologien für Geoinformationen
Vorlesung Prof. Dr. Markus Landvogt 14 Geoinformationssysteme im Tourismus 14 1 Geoinformationssysteme 1. Einführung und Definitionen 2. Karten-Informationssysteme 3. Technologien für Geoinformationen
Biologisch motivierter SLAM Algorithmus
 HAW Hamburg 01. Dezember 2011 Gliederung 1 Einführung 2 RatSLAM 3 Aussicht für Master 2 / 23 Einführung Was ist SLAM SLAM bedeutet: Simultaneous Localization and Mapping Erstellung einer Karte durch mobilen
HAW Hamburg 01. Dezember 2011 Gliederung 1 Einführung 2 RatSLAM 3 Aussicht für Master 2 / 23 Einführung Was ist SLAM SLAM bedeutet: Simultaneous Localization and Mapping Erstellung einer Karte durch mobilen
Zur Konsistenz bei der Visualisierung multiskaliger 3D-Stadtmodelle
 Institut für Kartographie und Geoinformation Universität Bonn Zur Konsistenz bei der Visualisierung multiskaliger 3D-Stadtmodelle Gerhard Gröger Thomas H. Kolbe Lutz Plümer 40. Sitzung der Arbeitsgruppe
Institut für Kartographie und Geoinformation Universität Bonn Zur Konsistenz bei der Visualisierung multiskaliger 3D-Stadtmodelle Gerhard Gröger Thomas H. Kolbe Lutz Plümer 40. Sitzung der Arbeitsgruppe
Sensoren (1) Definition
 Definition") Sensoren () Definition Unter Sensoren versteht man Komponenten, in denen eine physikalische oder chemische Veränderung in ein geeignetes Nutzsignal erfasst oder gemessen wird. Sensoren () Sensorinformationen
Sensoren () Definition Unter Sensoren versteht man Komponenten, in denen eine physikalische oder chemische Veränderung in ein geeignetes Nutzsignal erfasst oder gemessen wird. Sensoren () Sensorinformationen
Geodateninfrastruktur Berlin: Das virtuelle 3D Stadtmodell
 3D Stadtmodell Berlin Geodateninfrastruktur Berlin: Das virtuelle 3D Stadtmodell EFRE Projekt Strategische Ziele 3D Stadtmodell Berlin Strategische Ziele Einsatz des 3D Stadtmodells für: Stadt- und Raumplanung,
3D Stadtmodell Berlin Geodateninfrastruktur Berlin: Das virtuelle 3D Stadtmodell EFRE Projekt Strategische Ziele 3D Stadtmodell Berlin Strategische Ziele Einsatz des 3D Stadtmodells für: Stadt- und Raumplanung,
GEO-INFORMATIONSSYSTEME
 LUDWIG- MAXIMILIANS- UNIVERSITY MUNICH DEPARTMENT INSTITUTE FOR INFORMATICS DATABASE GEO-INFORMATIONSSYSTEME Skript zur Vorlesung Geo-Informationssysteme Wintersemester 2015/16 Ludwig-Maximilians-Universität
LUDWIG- MAXIMILIANS- UNIVERSITY MUNICH DEPARTMENT INSTITUTE FOR INFORMATICS DATABASE GEO-INFORMATIONSSYSTEME Skript zur Vorlesung Geo-Informationssysteme Wintersemester 2015/16 Ludwig-Maximilians-Universität
Eigenschaften von Karten
 Eigenschaften von Karten 2 In jeder Karte finden wir zwei Arten der Generalisierung, die geometrische und die inhaltliche Generalisierung. Eine geometrische Generalisierung ist notwendig, da die absolut
Eigenschaften von Karten 2 In jeder Karte finden wir zwei Arten der Generalisierung, die geometrische und die inhaltliche Generalisierung. Eine geometrische Generalisierung ist notwendig, da die absolut
Räumliche Datenbanken
 Räumliche Datenbanken Datenbankentwurf 6. Vortrag zum Oberseminar Moderne Datenbanken von Jörg Winkler Übersicht Einleitung Geo-Informationssysteme (GIS) Topologische Beziehungen Erweiterungsansätze Constraints
Räumliche Datenbanken Datenbankentwurf 6. Vortrag zum Oberseminar Moderne Datenbanken von Jörg Winkler Übersicht Einleitung Geo-Informationssysteme (GIS) Topologische Beziehungen Erweiterungsansätze Constraints
Umstellung auf Lagereferenzsystem ETRS89_UTM33. Information zur zukünftigen Datenbereitstellung / Produktvorstellung
 Information zur zukünftigen Datenbereitstellung / Produktvorstellung Der Geodatenvertrieb im Staatsbetrieb Geobasisinformation und Vermessung Sachsen (GeoSN) Internetpräsentation zu den Produkten des GeoSN
Information zur zukünftigen Datenbereitstellung / Produktvorstellung Der Geodatenvertrieb im Staatsbetrieb Geobasisinformation und Vermessung Sachsen (GeoSN) Internetpräsentation zu den Produkten des GeoSN
Digitale Karten. Ortung und Navigation in Telematikdiensten Matthias Graffenberger und Max Dallüge TM-16
 Digitale Karten Ortung und Navigation in Telematikdiensten Matthias Graffenberger und Max Dallüge TM-16 Agenda 1. Was sind digitale Karten? 2. Kartenprojektion 3. Typen von Landkarten 1. Rasterkarten 2.
Digitale Karten Ortung und Navigation in Telematikdiensten Matthias Graffenberger und Max Dallüge TM-16 Agenda 1. Was sind digitale Karten? 2. Kartenprojektion 3. Typen von Landkarten 1. Rasterkarten 2.
Geovisualisierung: Wie aus Daten Informationen werden. Doris Dransch Helmholtz Zentrum Potsdam Deutsches GeoForschungsZentrum (GFZ)
") Geovisualisierung: Wie aus Daten Informationen werden Doris Dransch Helmholtz Zentrum Potsdam Deutsches GeoForschungsZentrum (GFZ) Agenda Situation in den Geowissenschaften Geovisualisierung und Visual
Geovisualisierung: Wie aus Daten Informationen werden Doris Dransch Helmholtz Zentrum Potsdam Deutsches GeoForschungsZentrum (GFZ) Agenda Situation in den Geowissenschaften Geovisualisierung und Visual
Interoperabler Datenaustausch ein entscheidender Faktor für erfolgreiche BIM-Projekte
 Interoperabler Datenaustausch ein entscheidender Faktor für erfolgreiche BIM-Projekte 6. Oldenburger BIM Tag, 28.02.2019 Anne-Kathrin Becker con terra GmbH Geo-Lösungen die überzeugen. Wir entwickeln Geo-Lösungen,
Interoperabler Datenaustausch ein entscheidender Faktor für erfolgreiche BIM-Projekte 6. Oldenburger BIM Tag, 28.02.2019 Anne-Kathrin Becker con terra GmbH Geo-Lösungen die überzeugen. Wir entwickeln Geo-Lösungen,
Workshop. 3D-Punktwolken. Erstellung, Bearbeitung und Anwendung
 Workshop 3D-Punktwolken Erstellung, Bearbeitung und Anwendung Willkommen / Bienvenue Workshop 3D-Punktwolken 7. Juni 2016 GEOSummit, Bern Programm 9:00 Begrüssung, Einleitung und Einführungsreferat 9:20
Workshop 3D-Punktwolken Erstellung, Bearbeitung und Anwendung Willkommen / Bienvenue Workshop 3D-Punktwolken 7. Juni 2016 GEOSummit, Bern Programm 9:00 Begrüssung, Einleitung und Einführungsreferat 9:20