Fišer Pavel, Dipl.-Ing. Jirásko Petr, Dr.-Ing. Václavík Miroslav, Prof. Dr.-Ing.
|
|
|
- Waltraud Straub
- vor 5 Jahren
- Abrufe
Transkript

1 Fišer Pavel, Dipl.-Ing. Jirásko Petr, Dr.-Ing. Václavík Miroslav, Prof. Dr.-Ing.





2



3 Berechnungen




4 Konstruktion








5 Materiale



6 Herstellung
7 1. Einführung Die Firma VÚTS, a.s., beschäftigt sich mit der Konstruktion und Herstellung von speziellen Einzweckmaschinen, die sie mit ihren entwickelten die Umsetzung der zuständigen Technologie ermöglichenden Steuerungssystemen bestückt. Die Abteilung für Mechatronik führt mehr als 10 Jahre die Anwendungsforschung von elektronischen Kurvenscheiben basierend auf HW und SW-Komponenten von Yaskawa (Japan) durch. Da die Anwendung von elektronischen Kurvenscheiben mit den eigenen Steuersystemen zusammenhängt, wurde ein allgemeines Steuersystem entwickelt, das auf dem Konzept einer Zustandsmaschine mit manueller und automatischer Betriebsart basiert. Dieses Konzept ist im Bereich der Steuersysteme für Werkzeugmaschinen üblich. Der grundlegende Unterschied liegt jedoch in der automatischen Betriebsart, bei der die Programmlogik der elektronischen Kurvenscheiben zum Steuern einzelner NC-Achsen verwendet wird. Die Bewegung der Arbeitsglieder bzw. einzelner Achsen wird von den Bewegungsgesetzen abgeleitet, einschließlich der ersten und der zweiten Ableitungen, die in den Vorwärtskopplungen der Geschwindigkeit und des Momentes der Kaskadenregelstruktur in dem Servo- Wandler verwendet sind. Das Konzept des Steuersystems mit elektronischen Kurvenscheiben wurde für eine Anzahl von Einzweckmaschinen verwendet, von denen zwei Vertreter erwähnt werden.







8 2. Elektronische Kurvenscheibe Elektronische Kurvenscheibe ist ein Servo- Antrieb (ein mit einem Frequenz-Wandler-Servo- Wandler gespeister und mit einem Controller gesteuerter Synchron-Servomotor), der auf der Abtriebswelle des Rotors des Servomotors die erregende Bewegungsfunktion realisiert, mit Ausnutzung der dynamischen Eigenschaften der Bewegungsgesetze bzw. deren Ableitungen (der 1. und der 2.) Controller Servomotor Servopack
9 3. Bewegungsgesetz und Bewegungsfunktion Die Funktion, die der Zeit eine Positionsgröße eines bestimmten Gliedes eines zusammengesetzten Kurvengetriebes zuordnet, werden wir als eine Bewegungsfunktion dieses Gliedes nennen. Die Bewegungsfunktion der elektronischen Kurvenscheibe (theoretisch, tatsächlich) ist die Bewegung der Welle des Servomotors (Slave) nach der Zeit, und diese Bewegungsfunktion erregt ein dynamisches System der Übertragungsgetriebe der kinematischen Kette, an deren Ende ein Arbeitsglied ist. Die entsprechenden Ableitungen der Bewegungsfunktion nach Zeit sind die Größen Geschwindigkeit und Beschleunigung. Die Funktion, die einer Position des bestimmten Elementes die Positionsgröße eines anderen Elementes des zusammengesetzten Kurvengetriebes zuordnet, werden wir als Bewegungsgesetz bezeichnen. Das Bewegungsgesetz der elektronischen Kurvenscheibe ist die theoretische Funktion der Welle des Servomotors (Slave) zu der Position der virtuellen Welle (Master), bzw. der virtuellen Rotation. Die zugehörigen Ableitungen des Bewegungsgesetzes nach Position der virtuellen Welle sind die erste und die zweite Ableitungen des Bewegungsgesetzes (die Null-Ableitung wird oft als der Hub selbst bezeichnet)
10 Die Beziehung zwischen dem Bewegungsgesetz und der Bewegungsfunktion des gleichen Gliedes, beispielsweise des angetriebenen Gliedes des Grundkurvengetriebes ist gemäß den Beziehungen (1), wo das Bewegungsgesetz mit dem Symbol Π bezeichnet ist, und zwar zwischen dem Eingangs- und Ausgangselement mit den allgemeinen Koordinaten q. (1) Das Bewegungsgesetz (0., 1. und. 2. Ableitung) einer elektronischen Kurvenscheibe, die durch die Winkelgeschwindigkeit und die Beschleunigung der virtuellen Welle umgewandelt ist, ist die theoretische Bewegungsfunktion. Die Differenz zwischen der gewünschten theoretischen (Soll-Funktion) und der tatsächlichen Bewegungsfunktion (Ist-Funktion) ist die Positionsgenauigkeit der Bewegungsfunktion der elektronischen Kurvenscheibe (im Folgenden bezeichnet als PERR). Eines der Ziele der Anwendung der elektronischen Kurvenscheiben ist es, die bestmögliche Abstimmung der theoretischen Bewegungsfunktion mit der tatsächlichen auf der Welle des Servomotors zu erreichen. Der Wert PERR ist prinzipiell (!) und dessen Größe ist die Funktion der Parameter in der Kaskadenregelung im Servo-Wandler (Yaskawa), der äußeren dynamischen (trägen) und technologischen (Produktions-) Belastung.
11 4. Umsetzung der Bewegungsgesetze im Steuersystem von Yaskawa Durch Verallgemeinerung kommen wir zu dem Schluss, dass die Realisierung einer elektronischen Kurvenscheibe in der Entwicklungsumgebung eines beliebigen Antriebssteuerungssystems die Verarbeitung der Daten des Bewegungsgesetzes mit dessen Ableitungen (Hub, 1. und 2. Ableitung) in die Bewegungsfunktion (Position, Geschwindigkeit und Beschleunigung) der Abtriebswelle des Servomotors ist. Das System verarbeitet die Geschwindigkeits- und Beschleunigungswerte weiter in Vorwärtskopplungen (Feed Forward, siehe rote Pfeile in Bild) der Geschwindigkeit und des Drehmoments in Bezug auf die Trägheitsmassen und andere externe (technologische) Kraftbelastung.
.")
12 5. Steuerung von Servo-Antrieben Die Steuerung (Regelung) von Servo-Antrieben erfolgt über Parameter, die vom Hersteller zur Verfügung stehen. Wir verwenden das System der elektronischen Kurvenscheibe Yaskawa (SigmaV Servo-Antriebe, die Controllers der Serie MP2000 / 3000). Ziel ist es, die Parameterwerte so festzulegen, dass die elektromagnetische Kopplung Stator/Rotor so steif wie möglich ist (aus Sicht der technischen Mechanik). In Bild ist ein Ausschnitt der Kaskadenregelung des Servo-Wandlers mit den verwendeten Parametern: Pn100 Speed Loop Gain [Hz] Pn101 Speed Loop Integral Time Constant [ms] Pn102 Position Loop Gain [s -1 ] Pn401 Torque Reference Filter Time Constant [ms] Der Hersteller empfiehlt auch die Werte dieser Parameter in zehn Steuerstufen, wobei die Werkseinstellung Stufe 4 ist, die die Parameter Pn100 / Pn101 / Pn102 / Pn401 bei den Werten 40 [Hz] / 20 [ms] / 40 [s -1 ] ms] aufweist.

13 6. Positionsfehler PERR Der Grund, warum wir die Größe von PERR und seine Minimierung in Anwendungen von elektronischen Kurvenscheiben betonen, sind die Erfordernisse präziser Fertigungstechnologien (z. B. Einzweck-Bearbeitungsmaschinen) und die korrekte Funktion des mechatronischen Differentials in Anwendungen von nichtperiodischen (Schritt-) Bewegungsgesetzen, wo die gewünschte Ruhe eine Überlagerung (Superposition) der Bewegungen eines klassischen und eines elektronischen Getriebes ist.
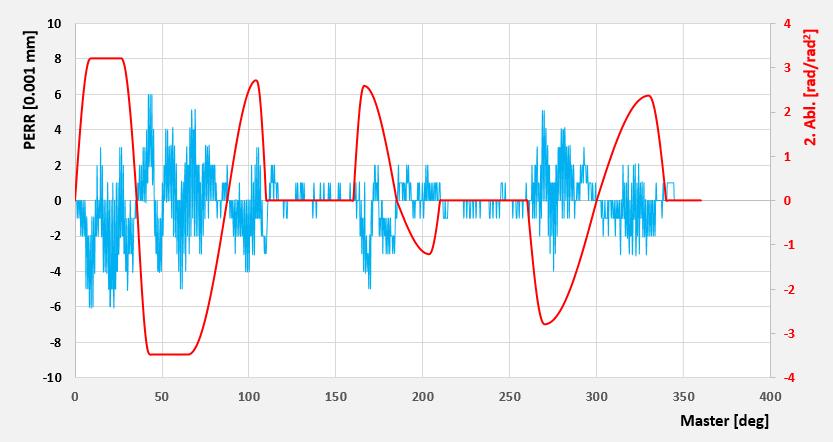


14 PERR Positionsfehler PERR Fázové posunutí 1. derivace o 0.17 [deg]
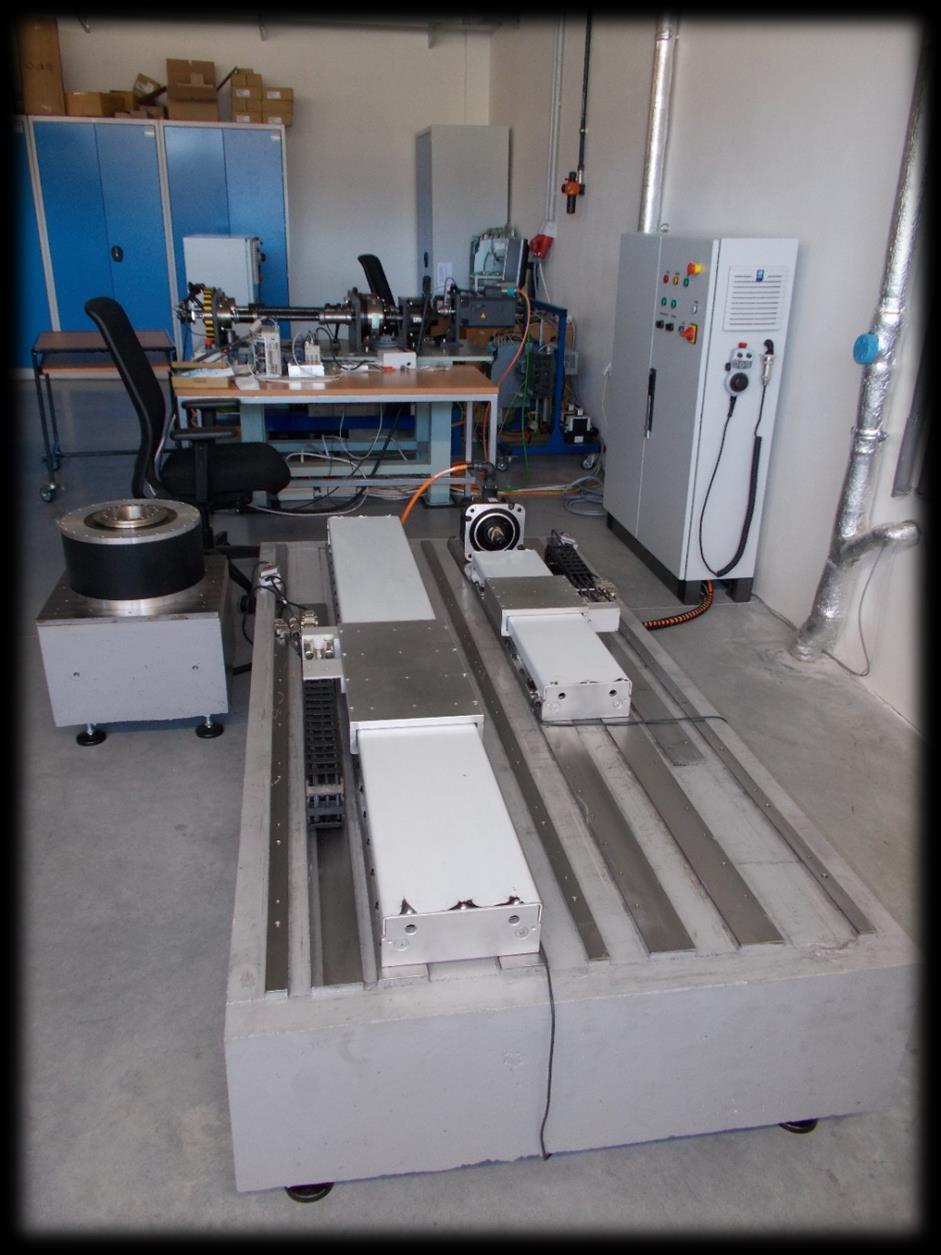




15 7. Dynamische Versuchsstände
16 Lasvit, s.r.o. Metrie, s.r.o. BRV-300 CNC
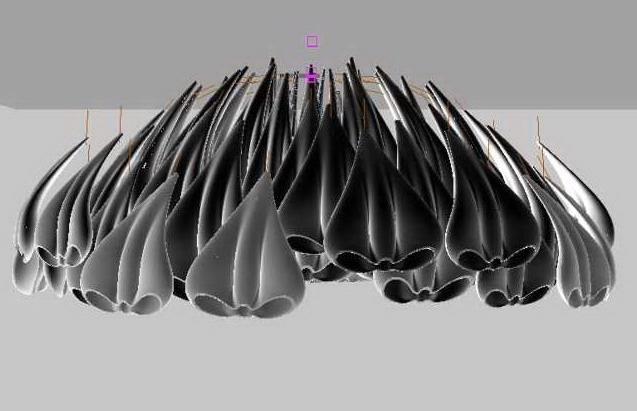



17 Kinetic sculptures LASVIT s.r.o.




18




19



20



21 METRIE s.r.o.



22


23




24 BRV CNC





25



26 Danke, auf wiedersehen
Problematik der Einzweckmaschinen mit elektronischen Kurvenscheiben
 Fišer, Pavel, Dipl.-Ing. Jirásko, Petr, Dr.-Ing. Václavík, Miroslav, Prof. Dr.-Ing. Problematik der Einzweckmaschinen mit elektronischen Kurvenscheiben 1 Einführung Die Firma VÚTS, a.s., beschäftigt sich
Fišer, Pavel, Dipl.-Ing. Jirásko, Petr, Dr.-Ing. Václavík, Miroslav, Prof. Dr.-Ing. Problematik der Einzweckmaschinen mit elektronischen Kurvenscheiben 1 Einführung Die Firma VÚTS, a.s., beschäftigt sich
Einfluss von Spannungsoberschwingungen und Rastmomenten auf den Gleichlauf von Servoantrieben mit Permanentmagnet-Synchronmotoren
 Einfluss von Spannungsoberschwingungen und Rastmomenten auf den Gleichlauf von Servoantrieben mit Permanentmagnet-Synchronmotoren Influence of voltage harmonics and cogging torque on speed deviations of
Einfluss von Spannungsoberschwingungen und Rastmomenten auf den Gleichlauf von Servoantrieben mit Permanentmagnet-Synchronmotoren Influence of voltage harmonics and cogging torque on speed deviations of
TECHNISCHE EIGENSCHAFTEN der A2 PANELS für ELEKTRISCH FERNGESTEUERTE MONITORE
 TECHNISCHE EIGENSCHAFTEN der A2 PANELS für ELEKTRISCH FERNGESTEUERTE MONITORE Allgemeine Beschreibung Die ferngesteuerten Monitore gibt es für Schaum-/ Wasserdurchflussraten von 50 bis 30000 l/min und
TECHNISCHE EIGENSCHAFTEN der A2 PANELS für ELEKTRISCH FERNGESTEUERTE MONITORE Allgemeine Beschreibung Die ferngesteuerten Monitore gibt es für Schaum-/ Wasserdurchflussraten von 50 bis 30000 l/min und
Mein besonderer Dank gilt meinem Betreuer, Herrn Prof. Dr. -Ing. P. Tenberge, da durch seine Anregung und Unterstützung diese Arbeit möglich wurde.
 Vorwort Die vorliegende Arbeit entstand während meiner Tätigkeit als Doktorrand am Institut für Konstruktions- und Antriebstechnik der Fakultät für Maschinenbau an der Technischen Universität Chemnitz,
Vorwort Die vorliegende Arbeit entstand während meiner Tätigkeit als Doktorrand am Institut für Konstruktions- und Antriebstechnik der Fakultät für Maschinenbau an der Technischen Universität Chemnitz,
CNC-Bearbeitungszentrum BAZ 895n IQ
 * Aufgrund ständiger technischer Weiterentwicklung kann diese Abbildung von der tatsächlich gelieferten Maschine abweichen. Funktionen Verwendung des Steuersystems SYNTEC, vollautomatische Produktion mit
* Aufgrund ständiger technischer Weiterentwicklung kann diese Abbildung von der tatsächlich gelieferten Maschine abweichen. Funktionen Verwendung des Steuersystems SYNTEC, vollautomatische Produktion mit
11. Vorlesung Wintersemester
 11. Vorlesung Wintersemester 1 Ableitungen vektorieller Felder Mit Resultat Skalar: die Divergenz diva = A = A + A y y + A z z (1) Mit Resultat Vektor: die Rotation (engl. curl): ( rota = A Az = y A y
11. Vorlesung Wintersemester 1 Ableitungen vektorieller Felder Mit Resultat Skalar: die Divergenz diva = A = A + A y y + A z z (1) Mit Resultat Vektor: die Rotation (engl. curl): ( rota = A Az = y A y
Bachelorprüfung MM I 2. März Vorname: Name: Matrikelnummer:
 Institut für Mechatronische Systeme Prof. Dr.-Ing. S. Rinderknecht Erreichbare Punktzahl: 40 Bearbeitungszeit: 60 Min Prüfung Maschinenelemente & Mechatronik I 2. März 2010 Rechenteil Name: Matr. Nr.:......
Institut für Mechatronische Systeme Prof. Dr.-Ing. S. Rinderknecht Erreichbare Punktzahl: 40 Bearbeitungszeit: 60 Min Prüfung Maschinenelemente & Mechatronik I 2. März 2010 Rechenteil Name: Matr. Nr.:......
zub machine control AG
 zub machine control AG Wir übernehmen Verantwortung! Dienstleistungen Consulting SW-/HW- Engineering Produkte Kompetenzen Motion Control EtherCAT, CAN, Ethernet, USB Motion Control Module & Servoverstärker
zub machine control AG Wir übernehmen Verantwortung! Dienstleistungen Consulting SW-/HW- Engineering Produkte Kompetenzen Motion Control EtherCAT, CAN, Ethernet, USB Motion Control Module & Servoverstärker
Mechatronik Grundlagen
 Prüfung WS 2009/2010 Mechatronik Grundlagen Prof. Dr.-Ing. K. Wöllhaf Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit lesbarem Namen werden korrigiert. Keine rote Farbe verwenden.
Prüfung WS 2009/2010 Mechatronik Grundlagen Prof. Dr.-Ing. K. Wöllhaf Anmerkungen: Aufgabenblätter auf Vollständigkeit überprüfen Nur Blätter mit lesbarem Namen werden korrigiert. Keine rote Farbe verwenden.
Präzisierung zu Modulbereich Planung und Inbetriebnahme von Antrieben [E22]
![Präzisierung zu Modulbereich Planung und Inbetriebnahme von Antrieben [E22]](/thumbs/78/77299814.jpg "Präzisierung zu Modulbereich Planung und Inbetriebnahme von Antrieben [E22]") B A D E N - W Ü R T T E M B E R G R E G I E R U N G S P R Ä S I D I E N Freiburg // Karlsruhe // Stuttgart // Tübingen Abt. 7 Schule und Bildung Fortbildungsmodule >> Elektrotechnik Präzisierung zu Modulbereich
B A D E N - W Ü R T T E M B E R G R E G I E R U N G S P R Ä S I D I E N Freiburg // Karlsruhe // Stuttgart // Tübingen Abt. 7 Schule und Bildung Fortbildungsmodule >> Elektrotechnik Präzisierung zu Modulbereich
Inhalt. 1 Einführung Getriebesystematik...14
 1 Einführung...1 1.1 Aufgaben und Inhalt der Getriebelehre...1 1.2 Anwendungsgebiete der Getriebelehre...3 1.3 Beispiel einer getriebetechnischen Aufgabe...10 1.4 Hilfsmittel...11 1.4.1 VDI-Richtlinien...11
1 Einführung...1 1.1 Aufgaben und Inhalt der Getriebelehre...1 1.2 Anwendungsgebiete der Getriebelehre...3 1.3 Beispiel einer getriebetechnischen Aufgabe...10 1.4 Hilfsmittel...11 1.4.1 VDI-Richtlinien...11
Bahnkurven mit Servoantrieben und Riemen oder Ketten ruckfrei erzeugen
 Bahnkurven mit Servoantrieben und Riemen oder Ketten ruckfrei erzeugen Dipl.-Ing. Dipl.-Inform. Rainer Nolte, Nolte NC-Kurventechnik GmbH, Bielefeld Riemen und Ketten sind beliebte Maschinenelemente, um
Bahnkurven mit Servoantrieben und Riemen oder Ketten ruckfrei erzeugen Dipl.-Ing. Dipl.-Inform. Rainer Nolte, Nolte NC-Kurventechnik GmbH, Bielefeld Riemen und Ketten sind beliebte Maschinenelemente, um
Feldbacher Markus Manipulationstechnik Kinematik. Kinetik. (Bewegungslehre) Mechanik Lehre von der Bewegung von Körpern
 Mechanik Lehre von der Bewegung von Körpern") Kinematik (Bewegungslehre) Mechanik Lehre von der Bewegung von Körpern Kinematik Lehre von den geo- Metrischen Bewegungsverhältnissen von Körpern. Dynamik Lehre von den Kräften Kinetik Lehre von den Bewegungen
Kinematik (Bewegungslehre) Mechanik Lehre von der Bewegung von Körpern Kinematik Lehre von den geo- Metrischen Bewegungsverhältnissen von Körpern. Dynamik Lehre von den Kräften Kinetik Lehre von den Bewegungen
Energieeffiziente Hydraulikpressen. durch. direkangetriebenen Servo- Pumpenantrieb
 Energieeffiziente Hydraulikpressen durch direkangetriebenen Servo- Pumpenantrieb Hannover, 25. April 2012 1 Inhaltsübersicht 1. Kurze Vorstellung LASCO Umformtechnik GmbH 2. Motivation und Zielsetzung
Energieeffiziente Hydraulikpressen durch direkangetriebenen Servo- Pumpenantrieb Hannover, 25. April 2012 1 Inhaltsübersicht 1. Kurze Vorstellung LASCO Umformtechnik GmbH 2. Motivation und Zielsetzung
C x Hexapod Motion Controller
 C-887.52x Hexapod Motion Controller Kompaktes Tischgerät zur Steuerung von 6-Achs-Systemen Leistungsfähiger Controller mit Vektorsteuerung Kommandierung in kartesischen Koordinaten Änderungen des Bezugssystems
C-887.52x Hexapod Motion Controller Kompaktes Tischgerät zur Steuerung von 6-Achs-Systemen Leistungsfähiger Controller mit Vektorsteuerung Kommandierung in kartesischen Koordinaten Änderungen des Bezugssystems
Integration von Antrieb und Steuerung Modulare Maschinenkonzepte
 von Antrieb und Steuerung Modulare Maschinenkonzepte Automation and Drives Automation and Drives A&D Kompetenz weltweit Die Automatisierungslösungen für alle Branchen in denen sich was bewegt Werkzeugmaschinen
von Antrieb und Steuerung Modulare Maschinenkonzepte Automation and Drives Automation and Drives A&D Kompetenz weltweit Die Automatisierungslösungen für alle Branchen in denen sich was bewegt Werkzeugmaschinen
Allgemeine Bewegungsgleichung
 Freier Fall Allgemeine Bewegungsgleichung (gleichmäßig beschleunigte Bewegung) s 0, v 0 Ableitung nach t 15 Freier Fall Sprung vom 5-Meter Turm s 0 = 0; v 0 = 0 (Aufprallgeschwindigkeit: v = -10m/s) Weg-Zeit
Freier Fall Allgemeine Bewegungsgleichung (gleichmäßig beschleunigte Bewegung) s 0, v 0 Ableitung nach t 15 Freier Fall Sprung vom 5-Meter Turm s 0 = 0; v 0 = 0 (Aufprallgeschwindigkeit: v = -10m/s) Weg-Zeit
Industrielle Linearmotoren
 Industrielle Linearmotoren Rein elektrisches Antriebssystem Frei positionierbar im ganzen Hubbereich Für präzise und dynamische Positionieraufgaben Lange Lebensdauer dank linearem Direktantrieb Reinraumtauglich
Industrielle Linearmotoren Rein elektrisches Antriebssystem Frei positionierbar im ganzen Hubbereich Für präzise und dynamische Positionieraufgaben Lange Lebensdauer dank linearem Direktantrieb Reinraumtauglich
Lehr- und Forschungsprojekt Balancer
 Lehr- und Forschungsprojekt Balancer Prof. Dr.-Ing. Tobias Flämig-Vetter Email: tobias.flaemig@dhbw-stuttgart.de Tel: +49 711 1849 636 http://wwwlehre.dhbw-stuttgart.de/~flaemig/studienarbeiten/balancer/
Lehr- und Forschungsprojekt Balancer Prof. Dr.-Ing. Tobias Flämig-Vetter Email: tobias.flaemig@dhbw-stuttgart.de Tel: +49 711 1849 636 http://wwwlehre.dhbw-stuttgart.de/~flaemig/studienarbeiten/balancer/
Geberlose Antriebssysteme für Hochleistungs- Textilmaschinen
 Asynchronmotor oder Servoantrieb? Die ABM Greiffenberger Antriebstechnik GmbH präsentiert eine Alternative: Geberlose Antriebssysteme für Hochleistungs- Textilmaschinen Höchste Verfügbarkeit und sehr gute
Asynchronmotor oder Servoantrieb? Die ABM Greiffenberger Antriebstechnik GmbH präsentiert eine Alternative: Geberlose Antriebssysteme für Hochleistungs- Textilmaschinen Höchste Verfügbarkeit und sehr gute
In u run In. le erle e e re
 Hanfried Kerle, Reinhard Pittschellis, Burkhard Corves In u run In le erle e e re Analyse und Synthese ungleichmäßig übersetzender Getriebe 3., bearbeitete und ergänzte Auflage Mit 190 Abbildungen und
Hanfried Kerle, Reinhard Pittschellis, Burkhard Corves In u run In le erle e e re Analyse und Synthese ungleichmäßig übersetzender Getriebe 3., bearbeitete und ergänzte Auflage Mit 190 Abbildungen und
Übung 4 - Implementierung
 Übung 4 - Implementierung 1 PID-Realisierung Das Folgeverhalten eines PID-Reglers durch die Einführung von setpoint weights (a, b und c) verbessert werden kann. 1. P: Sollwertgewichtung a, oft 0 < a
Übung 4 - Implementierung 1 PID-Realisierung Das Folgeverhalten eines PID-Reglers durch die Einführung von setpoint weights (a, b und c) verbessert werden kann. 1. P: Sollwertgewichtung a, oft 0 < a
Grundstruktur mechatronischer Systeme
 Bild 2.1_1 Quelle: VDI Grundstruktur mechatronischer Systeme Bild 2.1_2 Grundstruktur mechatronischer Systeme am Beispiel ESP Bild 2.1_3 Quelle: VDI Arten von Flüssen innerhalb eines mechatronischen Systems
Bild 2.1_1 Quelle: VDI Grundstruktur mechatronischer Systeme Bild 2.1_2 Grundstruktur mechatronischer Systeme am Beispiel ESP Bild 2.1_3 Quelle: VDI Arten von Flüssen innerhalb eines mechatronischen Systems
Zusammenfassung. Kriterien einer physikalischen Messung 1. reproduzierbar (Vergleichbarkeit von Messungen an verschiedenen Orten und Zeiten)
") Zusammenfassung Kriterien einer physikalischen Messung 1. reproduzierbar (Vergleichbarkeit von Messungen an verschiedenen Orten und Zeiten) 2. quantitativ (zahlenmäßig in Bezug auf eine Vergleichsgröße,
Zusammenfassung Kriterien einer physikalischen Messung 1. reproduzierbar (Vergleichbarkeit von Messungen an verschiedenen Orten und Zeiten) 2. quantitativ (zahlenmäßig in Bezug auf eine Vergleichsgröße,
TM Servo-Steuereinheit
 TM-73726 Servo-Steuereinheit Benutzerhandbuch 2013 BioDigit Ltd. Alle Rechte vorbehalten. Die Vervielfältigung und/oder Veröffentlichung der Inhalte des vorliegenden Dokuments in jeglicher Form, einschließlich
TM-73726 Servo-Steuereinheit Benutzerhandbuch 2013 BioDigit Ltd. Alle Rechte vorbehalten. Die Vervielfältigung und/oder Veröffentlichung der Inhalte des vorliegenden Dokuments in jeglicher Form, einschließlich
Kinematik & Dynamik. Über Bewegungen und deren Ursache Die Newton schen Gesetze. Physik, Modul Mechanik, 2./3. OG
 Kinematik & Dynamik Über Bewegungen und deren Ursache Die Newton schen Gesetze Physik, Modul Mechanik, 2./3. OG Stiftsschule Engelberg, Schuljahr 2016/2017 1 Einleitung Die Mechanik ist der älteste Teil
Kinematik & Dynamik Über Bewegungen und deren Ursache Die Newton schen Gesetze Physik, Modul Mechanik, 2./3. OG Stiftsschule Engelberg, Schuljahr 2016/2017 1 Einleitung Die Mechanik ist der älteste Teil
Von der statischen zur dynamischen Sicherheitstechnik
 Von der statischen zur dynamischen Sicherheitstechnik Sicherheit und Antriebstechnik Tagung zur IEC 61508 (VDE 0803) Armin Glaser Leiter Produktmanagement Themenübersicht Normative Einbindung der IEC 61800-5-2
Von der statischen zur dynamischen Sicherheitstechnik Sicherheit und Antriebstechnik Tagung zur IEC 61508 (VDE 0803) Armin Glaser Leiter Produktmanagement Themenübersicht Normative Einbindung der IEC 61800-5-2
Vollständige Kompensation des Polygoneffekts bei kettengetriebenen Kurvengetrieben
 Vollständige Kompensation des Polygoneffekts bei kettengetriebenen Kurvengetrieben Dipl.-Ing. Dipl.-Inform. Rainer Nolte Nolte NC-Kurventechnik GmbH, Bielefeld Kettenantrieb Polygoneffekt kinetostatische
Vollständige Kompensation des Polygoneffekts bei kettengetriebenen Kurvengetrieben Dipl.-Ing. Dipl.-Inform. Rainer Nolte Nolte NC-Kurventechnik GmbH, Bielefeld Kettenantrieb Polygoneffekt kinetostatische
Mechatronik im Unternehmen - Eine Übersicht
 Thema: Mechatronik im Unternehmen - Eine Übersicht Dr.-Ing. Stefan Beer ABM Greiffenberger Antriebstechnik GmbH Marktredwitz 1 Gliederung: 1. Begriff Mechatronik 2. ABM Greiffenberger Antriebstechnik GmbH
Thema: Mechatronik im Unternehmen - Eine Übersicht Dr.-Ing. Stefan Beer ABM Greiffenberger Antriebstechnik GmbH Marktredwitz 1 Gliederung: 1. Begriff Mechatronik 2. ABM Greiffenberger Antriebstechnik GmbH
Die hochdynamischen Linearmotorachsen HL
 Die hochdynamischen Linearmotorachsen HL Die Linearmotorachsen HL bieten kompromisslose, modernste Antriebstechnik hoch integriert und einbaufertig. Kompakte und präzise Kugelumlaufführungen und ein absolutes
Die hochdynamischen Linearmotorachsen HL Die Linearmotorachsen HL bieten kompromisslose, modernste Antriebstechnik hoch integriert und einbaufertig. Kompakte und präzise Kugelumlaufführungen und ein absolutes
Gewindeschneide Modul
 Gewindeschneide Modul Rev. 1.1 copyright 2014 CS-Lab s.c. Inhaltsverzeichnis 1. Allgemein...3 1.1 In dieser Bedienungsanleitung verwendete Symbole... 3 1.2 Konformität mit den Normen... 3 2. Anschluss
Gewindeschneide Modul Rev. 1.1 copyright 2014 CS-Lab s.c. Inhaltsverzeichnis 1. Allgemein...3 1.1 In dieser Bedienungsanleitung verwendete Symbole... 3 1.2 Konformität mit den Normen... 3 2. Anschluss
l p h (x) δw(x) dx für alle δw(x).
 δw(x) dx für alle δw(x).") 1.3 Potentielle Energie 5 In der modernen Statik benutzen wir statt dessen einen schwächeren Gleichheitsbegriff. Wir verlangen nur, dass die beiden Streckenlasten bei jeder virtuellen Verrückung dieselbe
1.3 Potentielle Energie 5 In der modernen Statik benutzen wir statt dessen einen schwächeren Gleichheitsbegriff. Wir verlangen nur, dass die beiden Streckenlasten bei jeder virtuellen Verrückung dieselbe
AUTOMATISIERTE SYNTHESE UND OPTIMIERUNG VON KURVENGETRIEBEN
 AUTOMATISIERTE SYNTHESE UND OPTIMIERUNG VON KURVENGETRIEBEN MIT Autor & Referent: Dipl.-Ing. Andreas Heine TU Chemnitz / Professur Montage- und Handhabungstechnik 09126 Chemnitz andreas.heine@mb.tu-chemnitz.de
AUTOMATISIERTE SYNTHESE UND OPTIMIERUNG VON KURVENGETRIEBEN MIT Autor & Referent: Dipl.-Ing. Andreas Heine TU Chemnitz / Professur Montage- und Handhabungstechnik 09126 Chemnitz andreas.heine@mb.tu-chemnitz.de
I.1.3 b. (I.7a) I.1 Grundbegriffe der Newton schen Mechanik 9
 I.1 Grundbegriffe der Newton schen Mechanik 9") I. Grundbegriffe der Newton schen Mechanik 9 I..3 b Arbeit einer Kraft Wird die Wirkung einer Kraft über ein Zeitintervall oder genauer über die Strecke, welche das mechanische System in diesem Zeitintervall
I. Grundbegriffe der Newton schen Mechanik 9 I..3 b Arbeit einer Kraft Wird die Wirkung einer Kraft über ein Zeitintervall oder genauer über die Strecke, welche das mechanische System in diesem Zeitintervall
Produktinformation SETA-AUDIO PM2.7
 Produktinformation SETA-AUDIO PM2.7 Erstellt von Dipl. Ing. Cay-Uwe Kulzer Version 1.0 Vorab Information 6. März 2014 1 1. Einleitung SETA-AUDIO ist ein junges Unternehmen im High End Audio Bereich, das
Produktinformation SETA-AUDIO PM2.7 Erstellt von Dipl. Ing. Cay-Uwe Kulzer Version 1.0 Vorab Information 6. März 2014 1 1. Einleitung SETA-AUDIO ist ein junges Unternehmen im High End Audio Bereich, das
Bandvorschub AV 40. Kurz - Info. Techn. Änderungen vorbehalten - Doku-Nr.:KI-AV-40-AH-04-DE
 Kurz - Info Anwendungsbereiche Der AV40 ist ein mit AC-Servo-Motor angetriebener Walzenvorschub und dient zum Vorschieben und Positionieren von Metallbändern in Stanzwerkzeugen Der AV40 kann an allen gängigen
Kurz - Info Anwendungsbereiche Der AV40 ist ein mit AC-Servo-Motor angetriebener Walzenvorschub und dient zum Vorschieben und Positionieren von Metallbändern in Stanzwerkzeugen Der AV40 kann an allen gängigen
Wirkungslinie einer Kraft, Drehmoment, Einfache Maschinen
 Übung 4 Rotations-Mechanik Wirkungslinie einer Kraft, Drehmoment, Einfache Maschinen Lernziele - wissen, dass sich die Wirkung einer Kraft nicht ändert, wenn man die Kraft auf ihrer Wirkungslinie verschiebt.
Übung 4 Rotations-Mechanik Wirkungslinie einer Kraft, Drehmoment, Einfache Maschinen Lernziele - wissen, dass sich die Wirkung einer Kraft nicht ändert, wenn man die Kraft auf ihrer Wirkungslinie verschiebt.
Gleichermaßen bedeutsam wie die Qualität der Lösung ist im Tagesgeschäft der Zeitaufwand für die Lösungsfindung.
 Kurven- und servogesteuerte Maschinen erreichen besonders hohe Leistung und Verarbeitungsqualität, wenn die Bewegungsabläufe nach dynamischen Kriterien wie Beschleunigung, Antriebsmoment, Hertzscher Pressung,
Kurven- und servogesteuerte Maschinen erreichen besonders hohe Leistung und Verarbeitungsqualität, wenn die Bewegungsabläufe nach dynamischen Kriterien wie Beschleunigung, Antriebsmoment, Hertzscher Pressung,
Automatisierungslösungen von Festo für die Montage von LED-Autoscheinwerfern
 Automatisierungslösungen von Festo für die Montage von LED-Autoscheinwerfern Highlights Kundenspezifisches Festo Handlings: Einbaufertige Dreiachshandlings mit Funktionsgarantie und vollständiger Dokumentation
Automatisierungslösungen von Festo für die Montage von LED-Autoscheinwerfern Highlights Kundenspezifisches Festo Handlings: Einbaufertige Dreiachshandlings mit Funktionsgarantie und vollständiger Dokumentation
Das Standardprogramm Kurvengetriebe umfaßt folgende Funktionen:
 Zeitschrift "UNI Cadmus" 1991 Seit über 20 Jahren gibt es das Programmpaket OPTIMUS MOTUS zur Entwicklung, Optimierung, Simulation und Berechnung von Kurven- und Gelenkgetrieben sowie zur Erstellung von
Zeitschrift "UNI Cadmus" 1991 Seit über 20 Jahren gibt es das Programmpaket OPTIMUS MOTUS zur Entwicklung, Optimierung, Simulation und Berechnung von Kurven- und Gelenkgetrieben sowie zur Erstellung von
1996 Martin Professional GmbH Technische Änderungen vorbehalten. RoboZap. Bedienungsanleitung
 1996 Martin Professional GmbH Technische Änderungen vorbehalten RoboZap Bedienungsanleitung INHALT EINFÜHRUNG..................................................... INSTALLATION DES ROBOZAP......................................
1996 Martin Professional GmbH Technische Änderungen vorbehalten RoboZap Bedienungsanleitung INHALT EINFÜHRUNG..................................................... INSTALLATION DES ROBOZAP......................................
FRAUNHOFER-INSTITUT FÜR PRODUKTIONSTECHNIK UND AUTOMATISIERUNG IPA ANTRIEBSSYSTEME UND EXOSKELETTE
 FRAUNHOFER-INSTITUT FÜR PRODUKTIONSTECHNIK UND AUTOMATISIERUNG IPA ANTRIEBSSYSTEME UND EXOSKELETTE MOTIVATION Mobilität ist eines der Grundbedürfnisse des Menschen und gerät durch den voranschreitenden
FRAUNHOFER-INSTITUT FÜR PRODUKTIONSTECHNIK UND AUTOMATISIERUNG IPA ANTRIEBSSYSTEME UND EXOSKELETTE MOTIVATION Mobilität ist eines der Grundbedürfnisse des Menschen und gerät durch den voranschreitenden
Entwurf und Regelung bionischer Roboter
 Entwurf und Regelung bionischer Roboter TU Berlin, FG Regelungssysteme Dr.-Ing. Ivo Boblan, www. ivo.boblan@tu-berlin.de, Tel.: ~29600, Raum EN 234 LV-Nr. 0430L094, IV (VL mit UE), 2.0 SWS - Donnerstags
Entwurf und Regelung bionischer Roboter TU Berlin, FG Regelungssysteme Dr.-Ing. Ivo Boblan, www. ivo.boblan@tu-berlin.de, Tel.: ~29600, Raum EN 234 LV-Nr. 0430L094, IV (VL mit UE), 2.0 SWS - Donnerstags
Bewegungsdesign nach Maß mit höheren Polynomen
 Bewegungsdesign nach Maß mit höheren Polynomen Dipl.-Ing. Dipl.-Inform. Rainer Nolte, Nolte NC-Kurventechnik GmbH, Bielefeld Ein wichtiger Aspekt bei der Entwicklung leistungsfähiger Verarbeitungsmaschinen
Bewegungsdesign nach Maß mit höheren Polynomen Dipl.-Ing. Dipl.-Inform. Rainer Nolte, Nolte NC-Kurventechnik GmbH, Bielefeld Ein wichtiger Aspekt bei der Entwicklung leistungsfähiger Verarbeitungsmaschinen
Radgetriebene Systeme
 Radgetriebene Systeme Mobilität, Räder Räder benötigen weniger Energie und erlauben eine schnellere Fortbewegung (auf entsprechendem Terrain) Benötigen Kinematische Gleichungen, d.h. Beschreibungen wie
Radgetriebene Systeme Mobilität, Räder Räder benötigen weniger Energie und erlauben eine schnellere Fortbewegung (auf entsprechendem Terrain) Benötigen Kinematische Gleichungen, d.h. Beschreibungen wie
QUICK SETUP GUIDE SECULIFE PS200
 QUICK SETUP GUIDE SECULIFE PS200 Der SECULIFE PS200 ist ein mikroprozessorbasierter Patientensimulator zur Simulation von EKG, Blutdruck, Atmung und Temperatur auf der Grundlage von zwölf Arrhythmie-,
QUICK SETUP GUIDE SECULIFE PS200 Der SECULIFE PS200 ist ein mikroprozessorbasierter Patientensimulator zur Simulation von EKG, Blutdruck, Atmung und Temperatur auf der Grundlage von zwölf Arrhythmie-,
Biomechanik - wie geht das?
 r Biomechanik - wie geht das? Heidi Schewe 274 Abbildungen in 419 Einzeldarstellungen 18 Tabellen 2000 Georg Thieme Verlag Stuttgart New York VII Inhaltsverzeichnis Einleitung. 1 1.1 1.2 1.2.1 1.2.2 1.2.3
r Biomechanik - wie geht das? Heidi Schewe 274 Abbildungen in 419 Einzeldarstellungen 18 Tabellen 2000 Georg Thieme Verlag Stuttgart New York VII Inhaltsverzeichnis Einleitung. 1 1.1 1.2 1.2.1 1.2.2 1.2.3
1996 Martin Professional GmbH technische Änderungen vorbehalten. RoboZap MSR Bedienungshandbuch
 1996 Martin Professional GmbH technische Änderungen vorbehalten RoboZap MSR 1200 Bedienungshandbuch INHALT EINFÜHRUNG..................................................... 2 INSTALLATION DES ROBOZAP MSR
1996 Martin Professional GmbH technische Änderungen vorbehalten RoboZap MSR 1200 Bedienungshandbuch INHALT EINFÜHRUNG..................................................... 2 INSTALLATION DES ROBOZAP MSR
Innovatives Testing Equipment GSE4 HDC Getriebeschalteinrichtung
 Innovatives Testing Equipment Getriebeschalteinrichtung Das -System ATESTEO ist der führende Spezialist für Drivetrain Testing verbunden mit Komponentenvalidierung, Fahrzeugmesstechnik und Engineering-Dienstleistungen.
Innovatives Testing Equipment Getriebeschalteinrichtung Das -System ATESTEO ist der führende Spezialist für Drivetrain Testing verbunden mit Komponentenvalidierung, Fahrzeugmesstechnik und Engineering-Dienstleistungen.
HYBRID SERVO DRIVER ES-DH2306
 MERKMALE: Closed-loop, eliminiert Schrittverluste bzw. Verlust der Synchronisation Versorgungsspannung: 150-230 VAC oder 212-325 VDC Exzellente Reaktionszeiten, schnelle Beschleunigung und sehr großes
MERKMALE: Closed-loop, eliminiert Schrittverluste bzw. Verlust der Synchronisation Versorgungsspannung: 150-230 VAC oder 212-325 VDC Exzellente Reaktionszeiten, schnelle Beschleunigung und sehr großes
Linearachssystemen. technische Vertriebsunterstützung
 Plug & Play mit einbaufertigen Linearachssystemen R i Reiner K öll Knöll technische Vertriebsunterstützung 1 Aktuelle und zukünftige Entwicklungen in der Hydraulik These: Die Erfüllung übergeordneter Trends
Plug & Play mit einbaufertigen Linearachssystemen R i Reiner K öll Knöll technische Vertriebsunterstützung 1 Aktuelle und zukünftige Entwicklungen in der Hydraulik These: Die Erfüllung übergeordneter Trends
Entwicklung eines getriebelosen Generators mit Luftspaltwicklung für den Betrieb bei extrem niedrigen Drehzahlen
 Entwicklung eines getriebelosen Generators mit Luftspaltwicklung für den Betrieb bei extrem niedrigen Drehzahlen Dipl.-Ing. Ralf Hinzelmann Dr.-Ing. Norman Borchardt Prof. Dr.-Ing. Roland Kasper Gliederung
Entwicklung eines getriebelosen Generators mit Luftspaltwicklung für den Betrieb bei extrem niedrigen Drehzahlen Dipl.-Ing. Ralf Hinzelmann Dr.-Ing. Norman Borchardt Prof. Dr.-Ing. Roland Kasper Gliederung
Einführung in die Robotik
 Einführung in die Robotik Vorlesung 5 27 November 2007 Dr. Mohamed Oubbati Institut für Neuroinformatik WS 2007/2008 Heutiges Thema: Aktoren Einführung Sensoren Mit Hilfe von Sensoren kann ein Roboter
Einführung in die Robotik Vorlesung 5 27 November 2007 Dr. Mohamed Oubbati Institut für Neuroinformatik WS 2007/2008 Heutiges Thema: Aktoren Einführung Sensoren Mit Hilfe von Sensoren kann ein Roboter
SecurePLUGandWORK eines Winkelkopfes in ein BAZ
 SecurePLUGandWORK eines Winkelkopfes in ein BAZ im Rahmen eines Verbundprojekts: Intelligente Inbetriebnahme von Maschinen und verketteten Anlagen Ein Beitrag zum Zukunftsprojekt Industrie 4.0 Reinhard
SecurePLUGandWORK eines Winkelkopfes in ein BAZ im Rahmen eines Verbundprojekts: Intelligente Inbetriebnahme von Maschinen und verketteten Anlagen Ein Beitrag zum Zukunftsprojekt Industrie 4.0 Reinhard
Klassische Theoretische Physik II (Theorie B) Sommersemester 2016
 Sommersemester 2016") Karlsruher Institut für Technologie Institut für Theorie der Kondensierten Materie Klassische Theoretische Physik II (Theorie B) Sommersemester 2016 Prof. Dr. Alexander Mirlin Musterlösung: Blatt 12. PD
Karlsruher Institut für Technologie Institut für Theorie der Kondensierten Materie Klassische Theoretische Physik II (Theorie B) Sommersemester 2016 Prof. Dr. Alexander Mirlin Musterlösung: Blatt 12. PD
Leitfaden zur Auswahl Serie SW/SD für Sektionaltore Folgen Sie dem Pfeil, wählen Sie das richtige Produkt
 Leitfaden zur Auswahl Serie SW/SD für Sektionaltore Folgen Sie dem Pfeil, wählen Sie das richtige Produkt Für federausgeglichene Sektionaltore Selbsthemmende Antriebe SW/SD einphasig 230 Vac 70 Nm, 20
Leitfaden zur Auswahl Serie SW/SD für Sektionaltore Folgen Sie dem Pfeil, wählen Sie das richtige Produkt Für federausgeglichene Sektionaltore Selbsthemmende Antriebe SW/SD einphasig 230 Vac 70 Nm, 20
Schnelle, bequeme und sichere Inbetrieb nahme durch einzig artige Bedienersoftware. WEISS Application Software
 SH 75 Dreheinheiten Hub-Dreheinheit SH 75 SH Hub-DrehEinheit WEISS Application Software Schnelle, bequeme und sichere Inbetrieb nahme durch einzig artige Bedienersoftware WEISS Application Software 198
SH 75 Dreheinheiten Hub-Dreheinheit SH 75 SH Hub-DrehEinheit WEISS Application Software Schnelle, bequeme und sichere Inbetrieb nahme durch einzig artige Bedienersoftware WEISS Application Software 198
Regelungstechnik. Eine kurze Einführung
 Regelungstechnik Eine kurze Einführung Regelungstechnik Übersicht und Begriffe Zweipunkt-Regler PID-Regler Weitergehende Konzepte Praktische Umsetzung Simulation Regelung vs. Steuerung Wert einstellen,
Regelungstechnik Eine kurze Einführung Regelungstechnik Übersicht und Begriffe Zweipunkt-Regler PID-Regler Weitergehende Konzepte Praktische Umsetzung Simulation Regelung vs. Steuerung Wert einstellen,
Kinematik des starren Körpers
 Technische Mechanik II Kinematik des starren Körpers Prof. Dr.-Ing. Ulrike Zwiers, M.Sc. Fachbereich Mechatronik und Maschinenbau Hochschule Bochum WS 2009/2010 Übersicht 1. Kinematik des Massenpunktes
Technische Mechanik II Kinematik des starren Körpers Prof. Dr.-Ing. Ulrike Zwiers, M.Sc. Fachbereich Mechatronik und Maschinenbau Hochschule Bochum WS 2009/2010 Übersicht 1. Kinematik des Massenpunktes
Elektrisch verursachte Vibrationen an drehzahlveränderlichen Antrieben
 Elektrisch verursachte Vibrationen an drehzahlveränderlichen Antrieben Problembeschreibung An Maschinen und Anlagen im industriellen Produktionsprozess werden höchste Anforderungen an die Gewährleistung
Elektrisch verursachte Vibrationen an drehzahlveränderlichen Antrieben Problembeschreibung An Maschinen und Anlagen im industriellen Produktionsprozess werden höchste Anforderungen an die Gewährleistung
Maschinenelemente-Skript Block A
 TUD-MB ME I / Block A Die neue Maschinenelemente- Lehre Prof.Dr.-Ing.H.Birkhofer Prof. Dr.-Ing. R. Nordmann Maschinenelemente-Skript Block A Fertigungstechnik Automobiltechnik Feinwerktechnik Aktoren Energiespeicher
TUD-MB ME I / Block A Die neue Maschinenelemente- Lehre Prof.Dr.-Ing.H.Birkhofer Prof. Dr.-Ing. R. Nordmann Maschinenelemente-Skript Block A Fertigungstechnik Automobiltechnik Feinwerktechnik Aktoren Energiespeicher
Beispielaufgaben für die Klausur KONSTRUKTION 1. TU Berlin, Konstruktionstechnik und Entwicklungsmethodik
 Beispielaufgaben für die Klausur KONSTRUKTION 1 Typische Verständnisaufgabe: Verspannung einer Schraubenverbindung a) Zeichnen Sie ein Verspannungsschaubild (ohne thermische Zusatzkraft) für δs / δp =
Beispielaufgaben für die Klausur KONSTRUKTION 1 Typische Verständnisaufgabe: Verspannung einer Schraubenverbindung a) Zeichnen Sie ein Verspannungsschaubild (ohne thermische Zusatzkraft) für δs / δp =
Beurteilungskriterien für Seilaufzugantriebe. Schwelmer Symposium 2012
 Schwelmer Symposium 2012 Ludwig Semmler Dipl. Ing. (FH) Geneickenerstrasse 190 41238 Mönchengladbach Tel.: 00 49 21 66 13 94 22 Fax.: 00 49 21 66 13 94 33 Mobil: 00 49 160 7 42 36 31 Mail: ludwig.semmler@ziehl-abegg.de
Schwelmer Symposium 2012 Ludwig Semmler Dipl. Ing. (FH) Geneickenerstrasse 190 41238 Mönchengladbach Tel.: 00 49 21 66 13 94 22 Fax.: 00 49 21 66 13 94 33 Mobil: 00 49 160 7 42 36 31 Mail: ludwig.semmler@ziehl-abegg.de
Dynamische Servoantriebsauslegung mit OPTIMUS MOTUS
 Völlig neue Möglichkeiten zur Auslegung von Servoantriebssträngen bietet die aktuelle Version der Windows-Software OPTIMUS MOTUS von Nolte NC- Kurventechnik. Aus einem ständig wachsenden Katalog von derzeit
Völlig neue Möglichkeiten zur Auslegung von Servoantriebssträngen bietet die aktuelle Version der Windows-Software OPTIMUS MOTUS von Nolte NC- Kurventechnik. Aus einem ständig wachsenden Katalog von derzeit
Klausur Physik I für Chemiker
 Universität Siegen Wintersemester 2017/18 Naturwissenschaftlich-Technische Fakultät Department Physik Klausur Physik I für Chemiker Prof. Dr. M. Agio Lösung zu Aufgabe 1: Schiefe Ebene i) Siehe Zeichnung
Universität Siegen Wintersemester 2017/18 Naturwissenschaftlich-Technische Fakultät Department Physik Klausur Physik I für Chemiker Prof. Dr. M. Agio Lösung zu Aufgabe 1: Schiefe Ebene i) Siehe Zeichnung
WAGO Kontakttechnik DALI-Multi-Master-Klemme Allgemeine Informationen EAN
 WAGO Kontakttechnik DALI-Multi-Master-Klemme 753-647 Allgemeine Informationen Artikelnummer ET5506613 EAN 4050821475712 Hersteller WAGO Kontakttechnik Hersteller-ArtNr 753-647 Hersteller-Typ 753-647 Verpackungseinheit
WAGO Kontakttechnik DALI-Multi-Master-Klemme 753-647 Allgemeine Informationen Artikelnummer ET5506613 EAN 4050821475712 Hersteller WAGO Kontakttechnik Hersteller-ArtNr 753-647 Hersteller-Typ 753-647 Verpackungseinheit
STO - Safe Torque Off
 Servo Drives mit STO - Safe Torque Off Indel Servo-Drives Sicherer Halt nach EN ISO 13849-1 GIN-SAC3 GIN-SAC3x3 INFO-SAC3 INFO-SAC3x3 Alle Indel Servo-Drives sind neu mit der Sicherheitsfunktion STO Safe
Servo Drives mit STO - Safe Torque Off Indel Servo-Drives Sicherer Halt nach EN ISO 13849-1 GIN-SAC3 GIN-SAC3x3 INFO-SAC3 INFO-SAC3x3 Alle Indel Servo-Drives sind neu mit der Sicherheitsfunktion STO Safe
Anlage zum Selektivlöten von Sensoren direkt im Schutzgehäuse
 Highlights Einbaufertige Handlingsystem von Festo zur Montage direkt an die Linie geliefert mit Funktionsgarantie und Dokumentation Schnelle und präzise X-, Y-, Z- Bewegungen Taktzeit von unter drei Sekunden
Highlights Einbaufertige Handlingsystem von Festo zur Montage direkt an die Linie geliefert mit Funktionsgarantie und Dokumentation Schnelle und präzise X-, Y-, Z- Bewegungen Taktzeit von unter drei Sekunden
5.4. KINETISCHE ENERGIE EINES STARREN KÖRPERS 203. Abbildung 5.12: Koordinaten zur Berechnung der kinetischen Energie (siehe Diskussion im Text)
") 5.4. KINETISCHE ENERGIE EINES STARREN KÖRPERS 03 ρ α r α R Abbildung 5.1: Koordinaten zur Berechnung der kinetischen Energie (siehe Diskussion im Text) 5.4 Kinetische Energie eines Starren Körpers In diesem
5.4. KINETISCHE ENERGIE EINES STARREN KÖRPERS 03 ρ α r α R Abbildung 5.1: Koordinaten zur Berechnung der kinetischen Energie (siehe Diskussion im Text) 5.4 Kinetische Energie eines Starren Körpers In diesem
SH HUB-DREHEINHEIT SH 75 DREHEINHEITEN HUB-DREHEINHEIT SH 75 WEISS APPLICATION SOFTWARE
 SH 75 DREHEINHEITEN HUB-DREHEINHEIT SH 75 SH HUB-DREHEINHEIT WEISS APPLICATION SOFTWARE Schnelle, bequeme und sichere Inbetrieb nahme durch einzig artige Bedienersoftware WEISS Application Software 198
SH 75 DREHEINHEITEN HUB-DREHEINHEIT SH 75 SH HUB-DREHEINHEIT WEISS APPLICATION SOFTWARE Schnelle, bequeme und sichere Inbetrieb nahme durch einzig artige Bedienersoftware WEISS Application Software 198
Highlights. Kunde Anforderungen Lösung. Projekt
 Zentrale Module: Servopressen-Bausatz und platzsparende Handlingsysteme Highlights Modulares und skalierbares Automatisierungskonzept Einfache Inbetriebnahme und Instandhaltung: Die Lösung basiert auf
Zentrale Module: Servopressen-Bausatz und platzsparende Handlingsysteme Highlights Modulares und skalierbares Automatisierungskonzept Einfache Inbetriebnahme und Instandhaltung: Die Lösung basiert auf
Virtuell oder schon Real Die Zukunft des digitalen Zwillings. Based on a real story
 Virtuell oder schon Real Die Zukunft des digitalen Zwillings Based on a real story Mechanik mit Software Mechatronik gestern 1 Mechanik mit Software Software mit Mechanik Mechatronik gestern im Zeitalter
Virtuell oder schon Real Die Zukunft des digitalen Zwillings Based on a real story Mechanik mit Software Mechatronik gestern 1 Mechanik mit Software Software mit Mechanik Mechatronik gestern im Zeitalter
FRAUNHOFER-INSTITUT FÜR. Antriebssysteme und Exoskelette
 FRAUNHOFER-INSTITUT FÜR Produktionstechnik und Automatisierung IPA Antriebssysteme und Exoskelette MOTIVATION ANGEBOT Mobilität ist eines der Grundbedürfnisse des Menschen und gerät durch den voranschreitenden
FRAUNHOFER-INSTITUT FÜR Produktionstechnik und Automatisierung IPA Antriebssysteme und Exoskelette MOTIVATION ANGEBOT Mobilität ist eines der Grundbedürfnisse des Menschen und gerät durch den voranschreitenden
Agentenbasiertes Product Data Management
 Sonderforschungsbereich 361 Modelle und Methoden zur integrierten Produkt- und Prozessentwicklung Agentenbasiertes Product Data Management Dipl.-Ing. Roman Klement BMW AG Kooperative Produktentwicklung
Sonderforschungsbereich 361 Modelle und Methoden zur integrierten Produkt- und Prozessentwicklung Agentenbasiertes Product Data Management Dipl.-Ing. Roman Klement BMW AG Kooperative Produktentwicklung
Teststand zur Prüfung von Servoventilen ValveExpert Pro (Luftfahrt Modell)
") Teststand zur Prüfung von Servoventilen ValveExpert Pro (Luftfahrt Modell) Abbildung 1. ValveExpert PRO (Luftfahrt Modell). Der Teststand ValveExpert Pro wurde enrwickelt um Servoventile zu prüfen, die
Teststand zur Prüfung von Servoventilen ValveExpert Pro (Luftfahrt Modell) Abbildung 1. ValveExpert PRO (Luftfahrt Modell). Der Teststand ValveExpert Pro wurde enrwickelt um Servoventile zu prüfen, die
ELEKTRISCHE ACHSE REIHE ELEKTRO SVAK AKTOREN
 ELEKTRISCHE ACHSE REIHE ELEKTRO SVAK 1 ELEKTRISCHE ACHSE REIHE ELEKTRO SVAK Dieser kolbenstangenlose Aktor mit Zahnriemenantrieb ist dadurch gekennzeichnet, dass Motor und Bremseinheit in den Schlitten
ELEKTRISCHE ACHSE REIHE ELEKTRO SVAK 1 ELEKTRISCHE ACHSE REIHE ELEKTRO SVAK Dieser kolbenstangenlose Aktor mit Zahnriemenantrieb ist dadurch gekennzeichnet, dass Motor und Bremseinheit in den Schlitten
Service & Support. Bewertung Verhältnis Fremdträgheitsmoment zu Motorträgheitsmoment
 lldeckblatt Bewertung Verhältnis Fremdträgheitsmoment zu Motorträgheitsmoment Hilfestellung Eingabe Grenzwerte für die farbliche Darstellung im SIZER FAQ August 213 Service & Support Answers for industry.
lldeckblatt Bewertung Verhältnis Fremdträgheitsmoment zu Motorträgheitsmoment Hilfestellung Eingabe Grenzwerte für die farbliche Darstellung im SIZER FAQ August 213 Service & Support Answers for industry.
Dynamische Werkstückbearbeitung
 MILLFORCE 1 / MILLFORCE 2 / MILLFORCE 3 Dynamische Werkstückbearbeitung P-SERIE K-SERIE T-SERIE MILLFORCE 02 / Anwendungen 03 / Maschinenkonzept 04 / Maschinentechnik 05 / Optionen und Ausstattungsvarianten
MILLFORCE 1 / MILLFORCE 2 / MILLFORCE 3 Dynamische Werkstückbearbeitung P-SERIE K-SERIE T-SERIE MILLFORCE 02 / Anwendungen 03 / Maschinenkonzept 04 / Maschinentechnik 05 / Optionen und Ausstattungsvarianten
Gliederung. Gliederung (cont.) Gliederung (cont.)
 Gliederung (cont.)") - Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 11. Mai 2010 Allgemeine Informationen Einführung
- Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 11. Mai 2010 Allgemeine Informationen Einführung
Drehimpuls, Drehmoment, Einfache Maschinen
 Aufgaben 4 Rotations-Mechanik Drehimpuls, Drehmoment, Einfache Maschinen Lernziele - das Drehimpulsbilanzgesetz verstehen und anwenden können. - wissen, dass sich die Wirkung einer Kraft nicht ändert,
Aufgaben 4 Rotations-Mechanik Drehimpuls, Drehmoment, Einfache Maschinen Lernziele - das Drehimpulsbilanzgesetz verstehen und anwenden können. - wissen, dass sich die Wirkung einer Kraft nicht ändert,
Flexible High Tech-Lösungen für die Industrie. Die die ein bisschen genauer hinsehen, entdecken viel viel mehr! Machine Tools
 Energy Saving breton.it/energy Flexible High Tech-Lösungen für die Industrie Die die ein bisschen genauer hinsehen, entdecken viel viel mehr! Machine Tools DE Kundenspezifisch Leistungsfähig Machine Tools
Energy Saving breton.it/energy Flexible High Tech-Lösungen für die Industrie Die die ein bisschen genauer hinsehen, entdecken viel viel mehr! Machine Tools DE Kundenspezifisch Leistungsfähig Machine Tools
Gliederung. Gliederung (cont.) Probleme der Dynamik von Manipulatoren
 Probleme der Dynamik von Manipulatoren") - Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 08. Juni 010 Allgemeine Informationen Einführung
- Gliederung Jianwei Zhang zhang@informatik.uni-hamburg.de Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 08. Juni 010 Allgemeine Informationen Einführung
P Streben Parallelkinematik High-Speed in der 5-Seiten- / 5-Achs-Bearbeitung Optimiert für den Werkzeug-, Formen- und Gesenkbau
 P1423 5 Streben Parallelkinematik High-Speed in der 5-Seiten- / 5-Achs-Bearbeitung Optimiert für den Werkzeug-, Formen- und Gesenkbau Geschwindigkeit neu erleben in höchster Präzision, Oberflächenqualität
P1423 5 Streben Parallelkinematik High-Speed in der 5-Seiten- / 5-Achs-Bearbeitung Optimiert für den Werkzeug-, Formen- und Gesenkbau Geschwindigkeit neu erleben in höchster Präzision, Oberflächenqualität
Kinematik des Viergelenk-Koppelgetriebes
 HTL-LiTec Viergelenk - Koppelgetriebe Seite 1 von 7 Dipl.-Ing. Paul MOHR email: p.mohr@eduhi.at Kinematik des Viergelenk-Koppelgetriebes Mathematische / Fachliche Inhalte in Stichworten: Kinematik; Getriebelehre;
HTL-LiTec Viergelenk - Koppelgetriebe Seite 1 von 7 Dipl.-Ing. Paul MOHR email: p.mohr@eduhi.at Kinematik des Viergelenk-Koppelgetriebes Mathematische / Fachliche Inhalte in Stichworten: Kinematik; Getriebelehre;
SolidLine-Launch-Day , Rodgau. Thema: virtuelle Produktentwicklung am Beispiel der KIESER AG, Zürich. daskernteam GbR, Modautal Start
 SolidLine-Launch-Day 08.10.2009, Rodgau Vortrag: Fit für Fitness Thema: virtuelle Produktentwicklung am Beispiel der KIESER AG, Zürich Autor: daskernteam GbR, Modautal Start Fit für Fitness virtuelle Produktentwicklung
SolidLine-Launch-Day 08.10.2009, Rodgau Vortrag: Fit für Fitness Thema: virtuelle Produktentwicklung am Beispiel der KIESER AG, Zürich Autor: daskernteam GbR, Modautal Start Fit für Fitness virtuelle Produktentwicklung
KAMAY Werkzeugbau GmbH
 KAMAY Werkzeugbau GmbH Ihr starker Partner im Werkzeugbau Wer wir sind Die KAMAY Werkzeugbau GmbH ist ein international agierendes Familienunternehmen. Wir sind Hersteller von hochpräzisen Transfer-,
KAMAY Werkzeugbau GmbH Ihr starker Partner im Werkzeugbau Wer wir sind Die KAMAY Werkzeugbau GmbH ist ein international agierendes Familienunternehmen. Wir sind Hersteller von hochpräzisen Transfer-,
Hexapod Motion Controller mit EtherCAT
 Hexapod Motion Controller mit EtherCAT 6-Achs-Positioniersystem über Feldbus-Schnittstelle steuern C-887.53x Integration in Automatisierungsverbund Taktsynchrone Bewegung in 6 Achsen Zykluszeit 1 ms Kommandierung
Hexapod Motion Controller mit EtherCAT 6-Achs-Positioniersystem über Feldbus-Schnittstelle steuern C-887.53x Integration in Automatisierungsverbund Taktsynchrone Bewegung in 6 Achsen Zykluszeit 1 ms Kommandierung
M1 Maxwellsches Rad. 1. Grundlagen
 M1 Maxwellsches Rad Stoffgebiet: Translations- und Rotationsbewegung, Massenträgheitsmoment, physikalisches Pendel. Versuchsziel: Es ist das Massenträgheitsmoment eines Maxwellschen Rades auf zwei Arten
M1 Maxwellsches Rad Stoffgebiet: Translations- und Rotationsbewegung, Massenträgheitsmoment, physikalisches Pendel. Versuchsziel: Es ist das Massenträgheitsmoment eines Maxwellschen Rades auf zwei Arten
Echtzeitmodellierung und Simulation von Elektrofahrzeugen
 Echtzeitmodellierung und Simulation von Elektrofahrzeugen Aufbau eines Demonstrators mit NI VeriStand und SimulationX zur Abbildung eines elektrisch betriebenen Allrad-Buggy Torsten Blochwitz, Jens Schindler
Echtzeitmodellierung und Simulation von Elektrofahrzeugen Aufbau eines Demonstrators mit NI VeriStand und SimulationX zur Abbildung eines elektrisch betriebenen Allrad-Buggy Torsten Blochwitz, Jens Schindler
Vertiefungsrichtung Produktionstechnik
 Vertiefungsrichtung Produktionstechnik Prof. Dr.-Ing. habil. Volker Schulze Karlsruhe, wbk Institut für Produktionstechnik KIT Die Forschungsuniversität in der Helmholtz-Gemeinschaft www.wbk.kit.edu Die
Vertiefungsrichtung Produktionstechnik Prof. Dr.-Ing. habil. Volker Schulze Karlsruhe, wbk Institut für Produktionstechnik KIT Die Forschungsuniversität in der Helmholtz-Gemeinschaft www.wbk.kit.edu Die
8. Kurvenberechnung und Erzeugung von CAD-Geometrie
 Inhalt: 1. Voraussetzungen und Aufgabenstellung 2. Lösungsansatz 3. Bewegungsdiagramm 4. Bewegungssimulation 5. Definition der Kurvenberechnung 6. Kurvengetriebe-Identifikation 7. Identifikation des Bewegungsdiagramms
Inhalt: 1. Voraussetzungen und Aufgabenstellung 2. Lösungsansatz 3. Bewegungsdiagramm 4. Bewegungssimulation 5. Definition der Kurvenberechnung 6. Kurvengetriebe-Identifikation 7. Identifikation des Bewegungsdiagramms
Reparatur und Modernisierung von Werkzeugmaschinen
 Reparatur und Modernisierung von Werkzeugmaschinen Überholungen Overhaul unverändert System steuert die Maschine noch ihre primäre Funktion. Das genaue Ausmaß der Überholung ist von der Art der Maschine
Reparatur und Modernisierung von Werkzeugmaschinen Überholungen Overhaul unverändert System steuert die Maschine noch ihre primäre Funktion. Das genaue Ausmaß der Überholung ist von der Art der Maschine
Servoantriebe. Firmware 2G IndraDrive (MPE, MPB/MPM, MPC)
") Firmware 2G IndraDrive (MPE, MPB/, MPC) 2 Bosch Rexroth AG Electric Drives and Controls Firmware 2G IndraDrive (MPE, MPB/, MPC) Dokumentation Firmware Maßgeschneiderte Funktion Alle Standardfunktionen
Firmware 2G IndraDrive (MPE, MPB/, MPC) 2 Bosch Rexroth AG Electric Drives and Controls Firmware 2G IndraDrive (MPE, MPB/, MPC) Dokumentation Firmware Maßgeschneiderte Funktion Alle Standardfunktionen
Hochschule Düsseldorf University of Applied Sciences. 22. Dezember 2016 HSD. Physik. Schwingungen
 Physik Schwingungen Zusammenfassung Mechanik Physik Mathe Einheiten Bewegung Bewegung 3d Newtons Gesetze Energie Gravitation Rotation Impuls Ableitung, Integration Vektoren Skalarprodukt Gradient Kreuzprodukt
Physik Schwingungen Zusammenfassung Mechanik Physik Mathe Einheiten Bewegung Bewegung 3d Newtons Gesetze Energie Gravitation Rotation Impuls Ableitung, Integration Vektoren Skalarprodukt Gradient Kreuzprodukt
LIFTRONIC EASY Bilanciatore Pneumatico Rigido
 Bilanciatore Pneumatico Rigido Was ist LIFTRONIC EASY Liftronic EASY ist ein elektronisch gesteuerter Balancer mit elektromotorischem Hubantrieb. Liftronic EASY ist vielseitig verwendbar, sehr zuverlässig
Bilanciatore Pneumatico Rigido Was ist LIFTRONIC EASY Liftronic EASY ist ein elektronisch gesteuerter Balancer mit elektromotorischem Hubantrieb. Liftronic EASY ist vielseitig verwendbar, sehr zuverlässig
Tabellenpositionierung 8400 HighLine
 Beschreibung Zur Vorgabe der Zielposition für eine Positionierung gibt es beim 8400 HighLine vier Möglichkeiten: 1. Umschalten zwischen mehreren Positionier-Profilen 2. Ändern der Zielposition im Profil
Beschreibung Zur Vorgabe der Zielposition für eine Positionierung gibt es beim 8400 HighLine vier Möglichkeiten: 1. Umschalten zwischen mehreren Positionier-Profilen 2. Ändern der Zielposition im Profil
Innovatives Testing Equipment LMC3 Linear Motion Control
 Innovatives Testing Equipment LMC3 Linear Motion Control LMC3 Linear Motion Control ATESTEO ist der führende Spezialist für Drivetrain Testing verbunden mit Komponentenvalidierung, Fahrzeugmesstechnik
Innovatives Testing Equipment LMC3 Linear Motion Control LMC3 Linear Motion Control ATESTEO ist der führende Spezialist für Drivetrain Testing verbunden mit Komponentenvalidierung, Fahrzeugmesstechnik