Koordinator: Indurad GmbH Teilprojektleitung: Prof. Ingrid Scholl, Institut MASKOR Förderkennzeichen: 033R126(A-H)
|
|
|
- Daniel Kurzmann
- vor 7 Jahren
- Abrufe
Transkript
1 FKZ: 033R126(A-H) UPNS4D+: Untertägiges 4D+ Positionierungs-, Navigations- und Mapping-System zur hochselektiven, effizienten und im höchsten Maße sicheren Gewinnung wirtschaftsstrategischer Rohstoffe Koordinator: Indurad GmbH Teilprojektleitung: Prof. Ingrid Scholl, Institut MASKOR Förderkennzeichen: 033R126(A-H) Verbundpartner Xgraphic Ingenieurgesellschaft mbh GHH Fahrzeuge GmbH MILAN Geoservice GmbH TU Bergakademie Freiberg (TU BAF) Institut für Markscheidewesen und Geodäsie TU Delft, the Netherlands Section Resource Engineering Indurad GmbH Fritz Rensmann GmbH & Co KG Hermann Paus GmbH RWTH Aachen University Institut für Maschinentechnik der Rohstoffindustrie (IMR) FH Aachen Institut für Mobile Autonome Systeme und Kognitive Robotik (MASKOR) 1
2 FKZ: 033R126(A-H) Ausgangssituation und Zielsetzung Hochselektive, effiziente und sichere Gewinnung von mineralischen Rohstoffen insbesondere Seltener Erden aus heimischen Lagerstätten Messung von dynamischen Veränderungsprozessen und Erhöhung der Planungssicherheit Entwicklung eines mobilen autonomen und intelligenten Robotersystem zur Erkundung neuer Lagerstätten Entwicklung eines bergbautauglichen Multi-Sensor- Demonstrationssystem 2



3 FKZ: 033R126(A-H) Ausgangssituation und Zielsetzung Erkundungssystem Demonstratorsystem 3
4 FKZ: 033R126(A-H) Erste Ergebnisse (Auswahl) I. Integration und Demonstration Basisfahrzeug II. 6D-Kartographie und Visualisierung III. Navigation und Lokalisation IV. Markscheiderische Initialisierung V. Haufwerksanalyse VI. Leitstand-Software 4



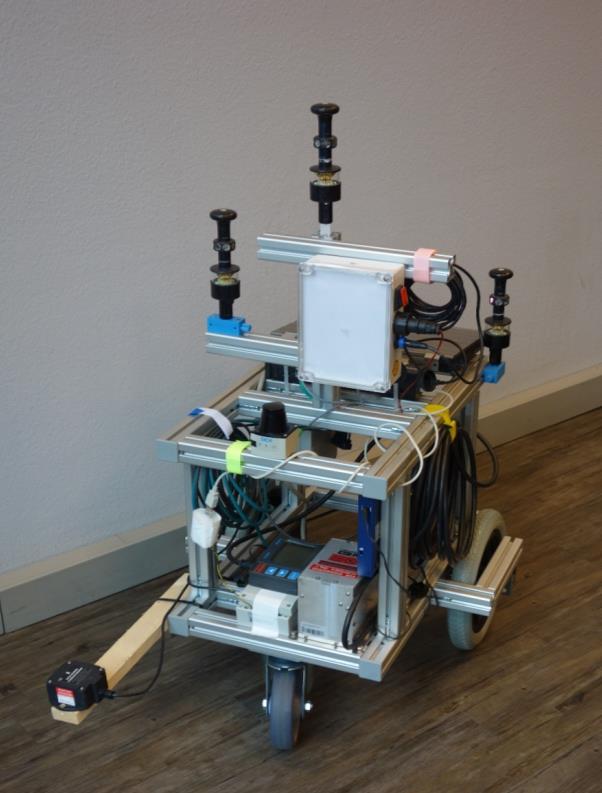
5 FKZ: 033R126G I. Integration und Demonstration Entwicklung des Basisfahrzeugs Konzept: Basis: Schienensystem zur individuellen Applikation der Komponenten schwingungsentkoppelte Plattform Steuerung, Ladeeinheit, Beleuchtung, Spannungswandlung Antrieb, Energieversorgung Prototyp 5 Montage Basisfahrwerk mit Antrieb und Federung Erste Fahrversuche



6 FKZ: 033R126C II. 6D-Kartographie Plattform MQOne Sensorik SWAP zur Aufnahme dichter Punktewolken Erstes autonome Fahren Rotating Platform for Swift Acquisition of Dense 3D Point Clouds 6


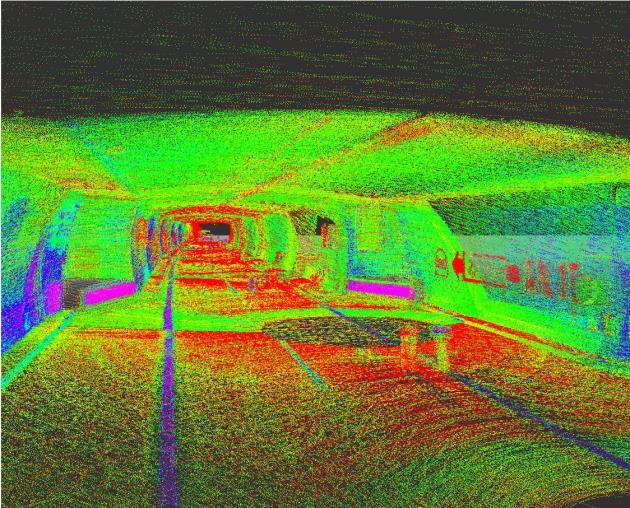
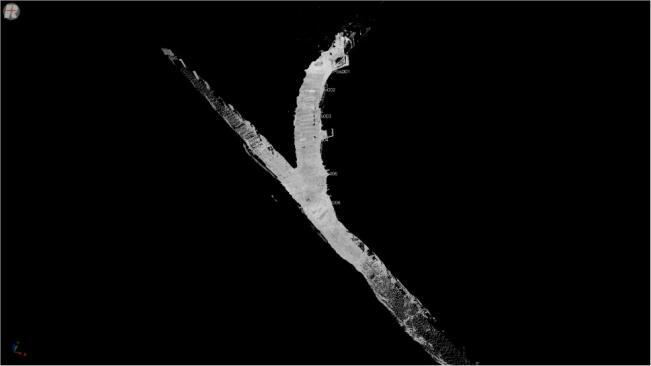
7 FKZ: 033R126C II. 6D-Kartographie 3D Rekonstruktion der Punktwolken Visualisierung 7

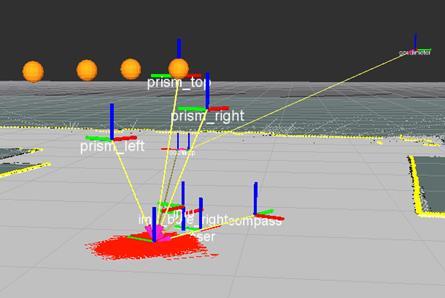
8 III. Lokalisation und Navigation Vermessung und Tracking von Posen 8





9 III. Lokalisation und Navigation Mapping und Posenfindung Mapping Algorithmus 9

10 IV. Markscheiderische Initialisierung Terrestrisches Scanning unter Tage in Freiberg: Standpunkte Scanner bisher 105, Abstand der Scannerstandpunkte von 3m bis 10m je nach Beschaffenheit und Höhe/Breite der Strecke, ca Messpunkte pro Standpunkt, insgesamt ca. 900 m Strecke gescannt 10



11 IV. Markscheiderische Initialisierung 11


12 Ziele FKZ: 033R126F V. Haufwerksanalyse Ziele / Aufgabe Charakterisierung der Korngrößenverteilung im bergmännischen Haufwerk Erkennung großer Partikel ( > 50 cm) und Ihre Lage innerhalb des bergmännischen Haufwerkes Optimierung nachgeschalteter Zerkleinerungsprozesse Optimierung der Sprengparameter Optimierung von Ladungsvorgängen (automatisierte Aufnahme des Haufwerks) Steigerung der Effizienz und Reduzierung von Umwelteinwirkungen UPNS4D+ Projekttreffen August 2016 Dr.-Ing. André John 12


13 FKZ: 033R126F V. Haufwerksanalyse Erkennung großer Partikel im bergmännischen Haufwerk: a. Erkennung aus Ergebnissen der Haufwerksanalyse: Korndurchmesser/-radius Fläche / Volumen Lage der Partikel: Schwerpunkt/Zentrum der angepassten Ellipse/Ellipsoid b. Direkte Ableitung großer Partikel aus der Punktwolke Region Growing auf Basis abgeschätzter Krümmungen Große Partikel besitzen i.d.r. größere Flächen/ Regionen mit ähnlichen Krümmungswerten UPNS4D+ Projekttreffen August 2016 Dr.-Ing. André John 13


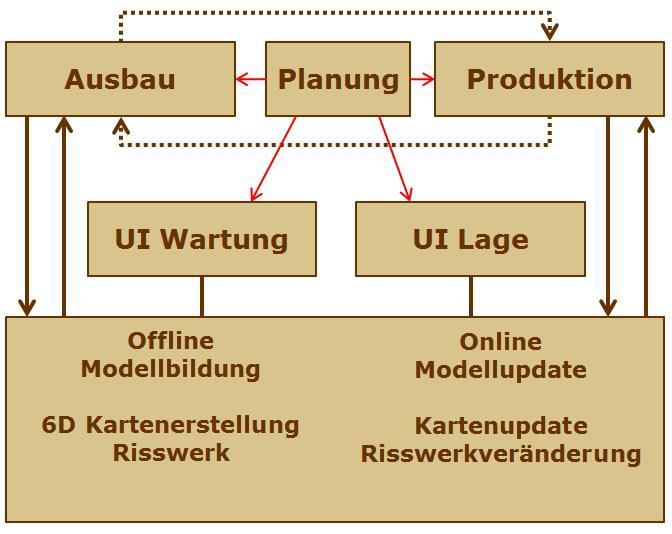
14 FKZ: 033R126E VI. Leitstand-Software Protoyp GUI/Visualisierung: 3D-Modell des Bergwerks Status-Anzeigen Ansichten für Ladefahrzeuge Schnittstellen-Implementierung VR-Test Import von Kollisionsdaten (Produktionsfahrzeug) 14
15 FKZ: 033R126(A-H) Aktuelle Projektentwicklungen TODO! Weitere Zielsetzungen: Inhalte der Aufstockung Neue Fragestellungen Nachjustierungen 15








16 FKZ: 033R126(A-H) Konsortium 16

17 FKZ: 033R126(A-H) Das Konsortium dankt dem BMBF zur r4-förderung UPNS4D+ 17
18 FKZ: 033R126(A-H) Veröffentlichungen (Auswahl) Geier, Andreas: Time-of-Flight Kameras für die 3D Geometrieerfassung im Kontext markscheiderischer Aufgabenstellungen.17. Geokinematischer Tag, Schriftenreihe des Institutes für Markscheidewesen und Geodäsie der TU Bergakademie Freiberg, Heft 2016(1), Wagner Digitaldruck und Medien GmbH, Nossen, S , ISBN Varga, Sebastian: Multisensorsystem für die automatisierte Detektion von Gangerzlagerstätten und seltenen Erden in einer Mine. 17. Geokinematischer Tag, Schriftenreihe des Institutes für Markscheidewesen und Geodäsie der TU Bergakademie Freiberg, Heft 2016(1), Wagner Digitaldruck und Medien GmbH, Nossen, S , ISBN Neumann, T., E. Dülberg, S. Schiffer, and A. Ferrein (2016). A Rotating Platform for Swift Acquisition of Dense 3D Point Clouds. In: ICIRA (1). Vol Lecture Notes in Computer Science. Springer, pp Ferrein, A. (2015). 3D-Mapping von Straßentunneln. In: 16. Geokinematischer Tag. Ed. by A. Sroka. Schriftenreihe des Instituts für Markscheidewesen und Geodäsie an der Technischen Universität Bergakademie Freiberg, pp Kruckel, K., F. Nolden, A. Ferrein, and I. Scholl (2015). Intuitive visual teleoperation for UGVs using free-look augmented reality displays. In: IEEE International Conference on Robotics and Automation, (ICRA-15). IEEE, pp Rebel, S., F. Hüning, I. Scholl, and A. Ferrein (2015). MQOne: Low-Cost Design for a Rugged-Terrain Robot Platform. In: Intelligent Robotics and Applications - Proceedings of the 8th International Conference, ICIRA. Ed. by H. Liu, N. Kubota, X. Zhu, R. Dillmann, and D. Zhou. Vol II. Lecture Notes in Computer Science, pp
Punktwolken Was kommt danach? Anwendungen im markscheiderischen Lagerstättenmonitoring
 1 Punktwolken Was kommt danach? Anwendungen im markscheiderischen Lagerstättenmonitoring Andreas GEIER und André JOHN Zusammenfassung Im Bergbau gehört das Markscheidewesen zu den klassischen Ingenieurdisziplinen.
1 Punktwolken Was kommt danach? Anwendungen im markscheiderischen Lagerstättenmonitoring Andreas GEIER und André JOHN Zusammenfassung Im Bergbau gehört das Markscheidewesen zu den klassischen Ingenieurdisziplinen.
Rolland. Niels Schütte Hristo Gurdzhanov. 1 Vorstellung 2 Gliederung 3 Forschung 4 Rolland 1 5 Rolland 2. 6 Obstacle Map 7 Rolland 3 8 Projekte
 Rolland Niels Schütte Gliederung Forschung Rolland 1 Rolland 2 ObstacleMap Rolland 3 Projekte Probleme Finanzierung Forschung Navigation/Raumkognition Sichere Systeme Rolland 1 Kamera Jede Menge Sensoren
Rolland Niels Schütte Gliederung Forschung Rolland 1 Rolland 2 ObstacleMap Rolland 3 Projekte Probleme Finanzierung Forschung Navigation/Raumkognition Sichere Systeme Rolland 1 Kamera Jede Menge Sensoren
Quadrocopters and it s Applications: Overview of State of the Art Techniques
 : Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
: Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
STEUERUNGSINTEGRIERTE VISION LÖSUNGEN
 STEUERUNGSINTEGRIERTE VISION LÖSUNGEN Bernecker + Rainer Industrie-Elektronik Ges.m.b.H Sebastian Sachse Open Automation Technologies Sebastian.sachse@br-automation.com B&R Strasse 1 5142 Eggelsberg Austria
STEUERUNGSINTEGRIERTE VISION LÖSUNGEN Bernecker + Rainer Industrie-Elektronik Ges.m.b.H Sebastian Sachse Open Automation Technologies Sebastian.sachse@br-automation.com B&R Strasse 1 5142 Eggelsberg Austria
LiDAR Mobile Mapping
 Institut für Kartographie und Geoinformatik Leibniz Universität Hannover LiDAR Mobile Mapping Visualisierung, Vermessung, Fahrerassistenz Claus.Brenner@ikg.uni-hannover.de IKG Erfassungsfahrzeug Riegl
Institut für Kartographie und Geoinformatik Leibniz Universität Hannover LiDAR Mobile Mapping Visualisierung, Vermessung, Fahrerassistenz Claus.Brenner@ikg.uni-hannover.de IKG Erfassungsfahrzeug Riegl
Das E-Auto und intelligente Mobilitätskonzepte für übermorgen
 Das E-Auto und intelligente Mobilitätskonzepte für übermorgen Sicht der Forschung aus dem Bereich Künstliche Intelligenz und Robotik 31.10.2013, Baunatal Jens Mey DFKI Bremen & Universität Bremen Robotics
Das E-Auto und intelligente Mobilitätskonzepte für übermorgen Sicht der Forschung aus dem Bereich Künstliche Intelligenz und Robotik 31.10.2013, Baunatal Jens Mey DFKI Bremen & Universität Bremen Robotics
Einsatz eines Online-Angebots zur Internationalisierung der Hochschullehre im Bereich Robotik
 Fakultät für Elektrotechnik, Informatik und Mathematik Institut für Elektrotechnik und Informationstechnik Einsatz eines Online-Angebots zur Internationalisierung der Hochschullehre im Bereich Robotik
Fakultät für Elektrotechnik, Informatik und Mathematik Institut für Elektrotechnik und Informationstechnik Einsatz eines Online-Angebots zur Internationalisierung der Hochschullehre im Bereich Robotik
Application Requirements Engineering
 Application Requirements Engineering - Fokus: Ableitung von Produktanforderungen - Günter Halmans / Prof. Dr. Klaus Pohl Software Systems Engineering ICB (Institute for Computer Science and Business Information
Application Requirements Engineering - Fokus: Ableitung von Produktanforderungen - Günter Halmans / Prof. Dr. Klaus Pohl Software Systems Engineering ICB (Institute for Computer Science and Business Information
Blindennavigation. als Anwendung für Location-based Services. Andreas Hub
 Blindennavigation als Anwendung für Location-based Services Andreas Hub Motivation? Wo bin ich? Was ist vor mir? Wo ist die Tür? Wo ist der Eingang? Kommen Gefahren? Was ist im Weg? Probleme Orientierung
Blindennavigation als Anwendung für Location-based Services Andreas Hub Motivation? Wo bin ich? Was ist vor mir? Wo ist die Tür? Wo ist der Eingang? Kommen Gefahren? Was ist im Weg? Probleme Orientierung
Einsatz einer Echtzeit-Publish/Subscribe-Kommunikation für die Teleoperation mobiler Roboter
 Einsatz einer Echtzeit-Publish/Subscribe-Kommunikation für die Teleoperation mobiler Roboter, André Herms und Michael Schulze lindhors@st.ovgu.de, {aherms,mschulze}@ovgu.de Fakultät für Informatik Institut
Einsatz einer Echtzeit-Publish/Subscribe-Kommunikation für die Teleoperation mobiler Roboter, André Herms und Michael Schulze lindhors@st.ovgu.de, {aherms,mschulze}@ovgu.de Fakultät für Informatik Institut
School of Engineering Institut für Mechatronische Systeme (IMS)
") School of Engineering Institut für Mechatronische Systeme (IMS) Zürcher Fachhochschule www.ims.zhaw.ch Forschung & Entwicklung Institut für Mechatronische Systeme (IMS) Mechatronik bringt die Disziplinen
School of Engineering Institut für Mechatronische Systeme (IMS) Zürcher Fachhochschule www.ims.zhaw.ch Forschung & Entwicklung Institut für Mechatronische Systeme (IMS) Mechatronik bringt die Disziplinen
Das Mapping Game der Kunstsammlung zur Ausstellung Unter der Erde. Von Kafka bis Kippenberger
 STADT UNTER! Entdecke Düsseldorfs Tunnel, Grotten, Tiefgaragen Das Mapping Game der Kunstsammlung zur Ausstellung Unter der Erde. Von Kafka bis Kippenberger Alissa Krusch Digitale Kommunikation, Kunstsammlung
STADT UNTER! Entdecke Düsseldorfs Tunnel, Grotten, Tiefgaragen Das Mapping Game der Kunstsammlung zur Ausstellung Unter der Erde. Von Kafka bis Kippenberger Alissa Krusch Digitale Kommunikation, Kunstsammlung
Improving the Accuracy of GPS
 Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Autonomous Systems Lab Zürich
 Philipp Krüsi 03.11.2011 Steuerung von UGVs Manuelle Fernsteuerung a) Fahrzeug in Sichtweite: Fahren auf Sicht b) Fahrzeug ausser Sicht: Steuerung mit Hilfe von Kamera-Bildern od. anderen Sensoren Autonome
Philipp Krüsi 03.11.2011 Steuerung von UGVs Manuelle Fernsteuerung a) Fahrzeug in Sichtweite: Fahren auf Sicht b) Fahrzeug ausser Sicht: Steuerung mit Hilfe von Kamera-Bildern od. anderen Sensoren Autonome
Was ist das i3mainz?
 Laserscanning zur drei- dimensionalen Objekterfassung: Grundlagen und Anwendungen Andreas Marbs i3mainz - Institut für Raumbezogene Informations- und Messtechnik FH Mainz - University of Applied Sciences
Laserscanning zur drei- dimensionalen Objekterfassung: Grundlagen und Anwendungen Andreas Marbs i3mainz - Institut für Raumbezogene Informations- und Messtechnik FH Mainz - University of Applied Sciences
Digitale Transformation am Beispiel vernetztes Auto Technische Möglichkeiten
 Digitale Transformation am Beispiel vernetztes Auto Technische Möglichkeiten Volker Gruhn Digitale Transformation Disruption Map: Sprengkraft der digitalen Transformation Quelle: Deloitte Digital/Heads!
Digitale Transformation am Beispiel vernetztes Auto Technische Möglichkeiten Volker Gruhn Digitale Transformation Disruption Map: Sprengkraft der digitalen Transformation Quelle: Deloitte Digital/Heads!
Projektgruppe DynOLog. Informatik 7 & 12 sowie IRPA und IML Frank Weichert. Pascal Libuschewski. Adrian Schyja. Andreas Kamagaew
 Projektgruppe DynOLog Dynamische Detektion von Objekten im Kontext von logistischen Anwendungsfällen Informatik 7 & 12 sowie IRPA und IML Frank Weichert Email: frank.weichert@tu-dortmund.de Pascal Libuschewski
Projektgruppe DynOLog Dynamische Detektion von Objekten im Kontext von logistischen Anwendungsfällen Informatik 7 & 12 sowie IRPA und IML Frank Weichert Email: frank.weichert@tu-dortmund.de Pascal Libuschewski
Master Automotive Systems
 Master Automotive Systems Prof. Dr.-Ing. Clemens Gühmann Technische Universität Berlin School IV Electrical Engineering and Computer Science Departement of Energy and Automation Technology Überblick Motivation
Master Automotive Systems Prof. Dr.-Ing. Clemens Gühmann Technische Universität Berlin School IV Electrical Engineering and Computer Science Departement of Energy and Automation Technology Überblick Motivation
5G LAB GERMANY. 5G Lab. Intelligente Lösungen für effiziente Mobilität. Was kann die neueste Generation Mobilfunk für effiziente Mobilität leisten?
 Fachtagung "Intelligente Lösungen für effiziente Mobilität" Intelligente Lösungen für effiziente Mobilität 5G LAB GERMANY 5G Lab Was kann die neueste Generation Mobilfunk für effiziente Mobilität leisten?
Fachtagung "Intelligente Lösungen für effiziente Mobilität" Intelligente Lösungen für effiziente Mobilität 5G LAB GERMANY 5G Lab Was kann die neueste Generation Mobilfunk für effiziente Mobilität leisten?
Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen
 Sicherheit durch Fahrerassistenz 2010 Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen Wojciech Derendarz, Thorsten Graf Volkswagen AG Friedrich M. Wahl TU Braunschweig,
Sicherheit durch Fahrerassistenz 2010 Ein Structure and Motion Ansatz zur Umfeldrekonstruktion in komplexen Fahrzeugumgebungen Wojciech Derendarz, Thorsten Graf Volkswagen AG Friedrich M. Wahl TU Braunschweig,
INTEGRATION VON INDUSTRIELLER BILDVERARBEITUNG IN DIE AUTOMATISIERUNGSTECHNIK MIT OPC UA
 INTEGRATION VON INDUSTRIELLER BILDVERARBEITUNG IN DIE AUTOMATISIERUNGSTECHNIK MIT OPC UA Bosch Kenndaten 2016 * Bosch-Gruppe gesamt Mobility Solutions Einer der weltweit größten Zulieferer von Kraftfahrzeugtechnik
INTEGRATION VON INDUSTRIELLER BILDVERARBEITUNG IN DIE AUTOMATISIERUNGSTECHNIK MIT OPC UA Bosch Kenndaten 2016 * Bosch-Gruppe gesamt Mobility Solutions Einer der weltweit größten Zulieferer von Kraftfahrzeugtechnik
Segmentierung und Datenapproximation von Laserscanneraufnahmen mittels statistischer Methoden
 Segmentierung und Datenapproximation von Laserscanneraufnahmen mittels statistischer Methoden Ingo Neumann, Jens-André Paffenholz und Nico Lindenthal GEODÄTISCHES INSTITUT HANNOVER Session: Laserscanning
Segmentierung und Datenapproximation von Laserscanneraufnahmen mittels statistischer Methoden Ingo Neumann, Jens-André Paffenholz und Nico Lindenthal GEODÄTISCHES INSTITUT HANNOVER Session: Laserscanning
Seminar im Grundstudium: Motion-Tracking in der Robotik
 Seminar im Grundstudium SS2007 Seminar im Grundstudium: Motion-Tracking in der Robotik Lehrstuhl für Hardware-Software-Co-Design Universität Erlangen-Nürnberg stefan.wildermann@informatik.uni-erlangen.de
Seminar im Grundstudium SS2007 Seminar im Grundstudium: Motion-Tracking in der Robotik Lehrstuhl für Hardware-Software-Co-Design Universität Erlangen-Nürnberg stefan.wildermann@informatik.uni-erlangen.de
Automatisierte Stoÿkantenkartierung auf der Basis von Daten eines terrestrischen Laserscanners
 Automatisierte Stoÿkantenkartierung auf der Basis von Daten eines terrestrischen Laserscanners Forschungsprojekt Auftraggeber: K+S AG, Kassel Projektpartner: Institut für Markscheidewesen und Geodäsie,
Automatisierte Stoÿkantenkartierung auf der Basis von Daten eines terrestrischen Laserscanners Forschungsprojekt Auftraggeber: K+S AG, Kassel Projektpartner: Institut für Markscheidewesen und Geodäsie,
Intelligente Energieversorgung in Gebäuden
 Intelligente Energieversorgung in Gebäuden durch individuelle Energiemanagementsysteme Thomas Hofmann 27.092016 1 Copyright ESI Copyright Group, 2016. ESI Group, All rights 2016. reserved. All rights reserved.
Intelligente Energieversorgung in Gebäuden durch individuelle Energiemanagementsysteme Thomas Hofmann 27.092016 1 Copyright ESI Copyright Group, 2016. ESI Group, All rights 2016. reserved. All rights reserved.
Future Network-based Semantic Technologies FUNSET Science
 AUTOMATION & CONTROL INSTITUTE INSTITUT FÜR AUTOMATISIERUNGS- & REGELUNGSTECHNIK Future Network-based Semantic Technologies FUNSET Science Munir Merdan und Reinhard Grabler Sparkling Science Kongress Workshop
AUTOMATION & CONTROL INSTITUTE INSTITUT FÜR AUTOMATISIERUNGS- & REGELUNGSTECHNIK Future Network-based Semantic Technologies FUNSET Science Munir Merdan und Reinhard Grabler Sparkling Science Kongress Workshop
Flexible Roboter- und Transportsysteme für die zunehmende Individualisierung von Produkten
 FZI FORSCHUNGSZENTRUM INFORMATIK Flexible Roboter- und Transportsysteme für die zunehmende Individualisierung von Produkten Prof. Dr.-Ing. Rüdiger Dillmann Arne Rönnau 11. Karlsruher Automations-Treff
FZI FORSCHUNGSZENTRUM INFORMATIK Flexible Roboter- und Transportsysteme für die zunehmende Individualisierung von Produkten Prof. Dr.-Ing. Rüdiger Dillmann Arne Rönnau 11. Karlsruher Automations-Treff
Think Forward. Juergen Dold, CEO Leica Geosystems / Hexagon Geosystems
 Think Forward Juergen Dold, CEO Leica Geosystems / Hexagon Geosystems 1 EIN VERGLEICH MIT DER MUSIK... 2 Entwicklungen in der Musik Phonograph Album Kassette Digitale Musik Mobilität 1899 1940 s 1950 s
Think Forward Juergen Dold, CEO Leica Geosystems / Hexagon Geosystems 1 EIN VERGLEICH MIT DER MUSIK... 2 Entwicklungen in der Musik Phonograph Album Kassette Digitale Musik Mobilität 1899 1940 s 1950 s
Einführung: Was ist AR?
 Einführung: Was ist AR? Vorlesung Augmented Reality Prof. Dr. Andreas Butz, Martin Wagner 15.04.2005 LMU München Medieninformatik Butz/Wagner Vorlesung Augmented Reality SS2005 13.04.2005 Folie 1 Organisatorisches
Einführung: Was ist AR? Vorlesung Augmented Reality Prof. Dr. Andreas Butz, Martin Wagner 15.04.2005 LMU München Medieninformatik Butz/Wagner Vorlesung Augmented Reality SS2005 13.04.2005 Folie 1 Organisatorisches
HafenCity Universität Hamburg 2009 Anwender Forum 16 Juni 2009
 1 Dienstag, 7. Juli 2009 Referenzen 3D Laser Scanning im Anlagenbau Gegründet: 1994 Standorte Berlin Köthen 30 Mitarbeiter Engineering - Anlagenbau Laser Scanning Rohrleitungstechnik Stahlbau Industrieanlagen
1 Dienstag, 7. Juli 2009 Referenzen 3D Laser Scanning im Anlagenbau Gegründet: 1994 Standorte Berlin Köthen 30 Mitarbeiter Engineering - Anlagenbau Laser Scanning Rohrleitungstechnik Stahlbau Industrieanlagen
SPI-Workbench: Modelle und Verfahren zur Synthese und Optimierung von Hardware/Software-Systemen aus SPI-Modellen
 SPI-Workbench: Modelle und Verfahren zur Synthese und Optimierung von Hardware/Software-Systemen aus SPI-Modellen Prof. Dr.-Ing. J. Teich C. Grabbe, Ch. Haubelt, D. Koch Hardware-Software-Co-Design Universität
SPI-Workbench: Modelle und Verfahren zur Synthese und Optimierung von Hardware/Software-Systemen aus SPI-Modellen Prof. Dr.-Ing. J. Teich C. Grabbe, Ch. Haubelt, D. Koch Hardware-Software-Co-Design Universität
Cyber-X-Systeme Robotik/KI in Automatisierungs-Anwendungen 2026
 Cyber-X-Systeme Robotik/KI in Automatisierungs-Anwendungen 2026 marion-abschlussmeilenstein bei CLAAS Prof. Dr. Joachim Hertzberg - DFKI Cyber-X-Systeme marion-abschlussmeilenstein 19.09.2013 Prof. Dr.
Cyber-X-Systeme Robotik/KI in Automatisierungs-Anwendungen 2026 marion-abschlussmeilenstein bei CLAAS Prof. Dr. Joachim Hertzberg - DFKI Cyber-X-Systeme marion-abschlussmeilenstein 19.09.2013 Prof. Dr.
Moderne Kartographie Technologien und Implikationen
 Moderne Kartographie Technologien und Implikationen Georg Gartner Feldkirch, November 2010 Kartographie ist in! Ist Kartographie in? Agenda Forschungsgruppe Kartographie Technologie Push Implikationen
Moderne Kartographie Technologien und Implikationen Georg Gartner Feldkirch, November 2010 Kartographie ist in! Ist Kartographie in? Agenda Forschungsgruppe Kartographie Technologie Push Implikationen
Verknüpfung von kombinatorischem Plattformund individuellem Produkttest für Software-Produktlinien
 Verknüpfung von kombinatorischem Plattformund individuellem Produkttest für Software-Produktlinien Andreas Wübbeke Sebastian Oster 23.02.2010 ES Real-Time Systems Lab Dept. of Electrical Engineering and
Verknüpfung von kombinatorischem Plattformund individuellem Produkttest für Software-Produktlinien Andreas Wübbeke Sebastian Oster 23.02.2010 ES Real-Time Systems Lab Dept. of Electrical Engineering and
Multisensorsystem für die automatisierte Detektion von Gangerzlagerstätten und seltenen Erden in einer Mine. Sebastian Varga
 Multisensorsystem für die automatisierte Detektion von Gangerzlagerstätten und seltenen Erden in einer Mine Sebastian Varga Technische Universität Bergakademie Freiberg, Institut für Markscheidewesen und
Multisensorsystem für die automatisierte Detektion von Gangerzlagerstätten und seltenen Erden in einer Mine Sebastian Varga Technische Universität Bergakademie Freiberg, Institut für Markscheidewesen und
FAMOS Galileo for Future AutoMOtive Systems
 FAMOS Galileo for Future AutoMOtive Systems Dr. Lutz Junge Wolfsburg, 08.09.2009 Der Straßenverkehr wächst! Situation und Entwicklung in Deutschland und Europa Hauptprobleme: Unfalltote 2007 EU-27 42.485
FAMOS Galileo for Future AutoMOtive Systems Dr. Lutz Junge Wolfsburg, 08.09.2009 Der Straßenverkehr wächst! Situation und Entwicklung in Deutschland und Europa Hauptprobleme: Unfalltote 2007 EU-27 42.485
AUSBILDUNG für INDUSTRIELLE BILDVERARBEITUNG - Skizze für tertiären Bereich
 AUSBILDUNG für INDUSTRIELLE BILDVERARBEITUNG - Skizze für tertiären Bereich FH-Prof. DI. Kurt Niel University of Applied Sciences Upper Austria Faculty of Engineering and Environmental Sciences kurt.niel@fh-wels.at
AUSBILDUNG für INDUSTRIELLE BILDVERARBEITUNG - Skizze für tertiären Bereich FH-Prof. DI. Kurt Niel University of Applied Sciences Upper Austria Faculty of Engineering and Environmental Sciences kurt.niel@fh-wels.at
HSW Systemhaus Sicherheitstechnik
 HSW Systemhaus Sicherheitstechnik ein Produkt von Hanseatische Schutz- und Wachdienst GmbH DroneTracker 2.0 Sicherheit für Ihr Unternehmen und Ihren Luftraum Sichern Sie Ihren Luftraum! Wieso Dedrone?
HSW Systemhaus Sicherheitstechnik ein Produkt von Hanseatische Schutz- und Wachdienst GmbH DroneTracker 2.0 Sicherheit für Ihr Unternehmen und Ihren Luftraum Sichern Sie Ihren Luftraum! Wieso Dedrone?
SAE schaarschmidt application engineering GmbH - Geschäftsprozess und Softwareengineering. seit 1998
 SAE schaarschmidt application engineering GmbH - Geschäftsprozess und Softwareengineering seit 1998 Software und ERP-Systeme (SAP) intelligent vernetzen & nutzen kundenindividuelle Produkte in Serie beauftragen
SAE schaarschmidt application engineering GmbH - Geschäftsprozess und Softwareengineering seit 1998 Software und ERP-Systeme (SAP) intelligent vernetzen & nutzen kundenindividuelle Produkte in Serie beauftragen
Scene Reconstruction with Multiple View Geometry
 Scene Reconstruction with Multiple View Geometry Anwendungen 2 16.06.2010 Nikolaus Rusitska nikolausrusitska@gmx.de Inhalt Rückblick Techniken Related Work Fazit 1 Rückblick Techniken Related Work Fazit
Scene Reconstruction with Multiple View Geometry Anwendungen 2 16.06.2010 Nikolaus Rusitska nikolausrusitska@gmx.de Inhalt Rückblick Techniken Related Work Fazit 1 Rückblick Techniken Related Work Fazit
Echtzeitortungssysteme
 Echtzeitortungssysteme Identifizieren und Lokalisieren zur effizienten Prozessgestaltung 10th LEIBNIZ CONFERENCE OF ADVANCED SCIENCE SENSORSYSTEME 2010 am 07. 08. Oktober 2010 Ron Kokkot, M.Sc. Fraunhofer
Echtzeitortungssysteme Identifizieren und Lokalisieren zur effizienten Prozessgestaltung 10th LEIBNIZ CONFERENCE OF ADVANCED SCIENCE SENSORSYSTEME 2010 am 07. 08. Oktober 2010 Ron Kokkot, M.Sc. Fraunhofer
Roberta Workshops. Robotik in Forschung und Lehre. Roberta Workshops. 3 Schwerpunkte Robotik in Schulen
 Roberta Workshops Robotik in Forschung und Lehre Prof. Dr. Martina Lehser Fakultät für Ingenieurwissenschaften Fachrichtung Informatik 18.06.2009 ZeMA Roberta RegioZentrum Saarland Hochschule für Technik
Roberta Workshops Robotik in Forschung und Lehre Prof. Dr. Martina Lehser Fakultät für Ingenieurwissenschaften Fachrichtung Informatik 18.06.2009 ZeMA Roberta RegioZentrum Saarland Hochschule für Technik
ES-Projektseminar (SS 2012)
") ES-Projektseminar (SS 2012) Endvortrag Team Justice League of America Dominik Matthias [Team ] Pascal Stephen Vorname Name; ES Real-Time Systems Lab Prof. Dr. rer. nat. Andy Schürr Dept. of Electrical
ES-Projektseminar (SS 2012) Endvortrag Team Justice League of America Dominik Matthias [Team ] Pascal Stephen Vorname Name; ES Real-Time Systems Lab Prof. Dr. rer. nat. Andy Schürr Dept. of Electrical
Geodäsie. .aus dem Weltall zum Grundstückseigentum. Studium Bachelor und Master of Science Geodäsie und Geoinformation
 Geodäsie.aus dem Weltall zum Grundstückseigentum Studium Bachelor und Master of Science Geodäsie und Geoinformation 10. September 2013 TU Darmstadt Institut für Geodäsie 1 Geodäsie im FB 13: Institut für
Geodäsie.aus dem Weltall zum Grundstückseigentum Studium Bachelor und Master of Science Geodäsie und Geoinformation 10. September 2013 TU Darmstadt Institut für Geodäsie 1 Geodäsie im FB 13: Institut für
Comparing Software Factories and Software Product Lines
 Comparing Software Factories and Software Product Lines Martin Kleine kleine.martin@gmx.de Betreuer: Andreas Wuebbeke Agenda Motivation Zentrale Konzepte Software Produktlinien Software Factories Vergleich
Comparing Software Factories and Software Product Lines Martin Kleine kleine.martin@gmx.de Betreuer: Andreas Wuebbeke Agenda Motivation Zentrale Konzepte Software Produktlinien Software Factories Vergleich
10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart
 10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart M.Eng. Marius Ziegler Projektleiter: Prof. Dr. M. Hahn 07. November 2014 Mobile Mapping Kernelemente Messgeräte zur Positionsbestimmung
10. Vermessungsingenieurtag Workshop 3 Mobile Mapping an der HFT Stuttgart M.Eng. Marius Ziegler Projektleiter: Prof. Dr. M. Hahn 07. November 2014 Mobile Mapping Kernelemente Messgeräte zur Positionsbestimmung
Integration eines pneumatischen Roboters in die Robotics API
 Integration eines pneumatischen Roboters in die Robotics API Ziel: Integration eines AirArms in die Robotics API und Umsetzung eines Demo-Anwendung Idee: Die MRK (Mensch Roboter Kooperation) bekommt zunehmend
Integration eines pneumatischen Roboters in die Robotics API Ziel: Integration eines AirArms in die Robotics API und Umsetzung eines Demo-Anwendung Idee: Die MRK (Mensch Roboter Kooperation) bekommt zunehmend
Einzelne Punkte werden in den folgenden Bedarfssteckbriefen aufgegriffen und näher beschrieben.
 Bedarfsprofil I Offenes Themenfeld Von besonderem Interesse sind neuartige Ansätze, die auf Fahrzeughersteller-Ebene noch nicht bekannt sind oder die bislang nicht explizit für das Automobil vorgesehen
Bedarfsprofil I Offenes Themenfeld Von besonderem Interesse sind neuartige Ansätze, die auf Fahrzeughersteller-Ebene noch nicht bekannt sind oder die bislang nicht explizit für das Automobil vorgesehen
AgREE Ag-Recycling von Elektrolyseelektroden
 AgREE Ag-Recycling von Elektrolyseelektroden Koordinator: Andreas Bulan Referent: Dr. Konstantinos Douzinas Förderkennzeichen: 033R144 Verbundpartner Covestro Deutschland AG, Leverkusen Siegfried Jacob
AgREE Ag-Recycling von Elektrolyseelektroden Koordinator: Andreas Bulan Referent: Dr. Konstantinos Douzinas Förderkennzeichen: 033R144 Verbundpartner Covestro Deutschland AG, Leverkusen Siegfried Jacob
IdentPro Intralogistiklösungen für. Rostock, 01. Juni 2016
 IdentPro Intralogistiklösungen für Rostock, 01. Juni 2016 IdentPro Intralogistiklösungen für Seehafen Wismar I N D U S T R I E 4.0 Teilnehmer Herr Groß Herr Peters Herr Rudat Herr Kremp Wismar, 16. Novemberr
IdentPro Intralogistiklösungen für Rostock, 01. Juni 2016 IdentPro Intralogistiklösungen für Seehafen Wismar I N D U S T R I E 4.0 Teilnehmer Herr Groß Herr Peters Herr Rudat Herr Kremp Wismar, 16. Novemberr
Scalypso - 3D-Laserscandaten effektiv auswerten
 Scalypso - 3D-Laserscandaten effektiv auswerten IB Dr. König Kopernikusstraße 2 14482 Potsdam Denkmal Tiefbau Präzision Anlagenbau 2-5 mm Entfernung 0.1 mm long distance Tachymetrie 10 max. 40 m midrange
Scalypso - 3D-Laserscandaten effektiv auswerten IB Dr. König Kopernikusstraße 2 14482 Potsdam Denkmal Tiefbau Präzision Anlagenbau 2-5 mm Entfernung 0.1 mm long distance Tachymetrie 10 max. 40 m midrange
IoT für KMU umgesetzt
 IoT für KMU umgesetzt Raphaël Müller Teamleiter Logistiklösungen Tools. Next Level. 2005 2013 2016 THE MES IS DEAD, LONG LIVE THE MES 4.0! «MES, as we know it, is dead. Whose fault is it? You probably
IoT für KMU umgesetzt Raphaël Müller Teamleiter Logistiklösungen Tools. Next Level. 2005 2013 2016 THE MES IS DEAD, LONG LIVE THE MES 4.0! «MES, as we know it, is dead. Whose fault is it? You probably
Verteilte Systeme / Kooperierende Roboter
 Verteilte Systeme / Kooperierende Roboter Proseminar Anwendungen und Methoden der Modernen Robotik SoSe 2005 Uni Hamburg Claudius Herder, Justus Winter 4herder@informatik.uni-hamburg.de, 4winter@informatik.uni-hamburg.de
Verteilte Systeme / Kooperierende Roboter Proseminar Anwendungen und Methoden der Modernen Robotik SoSe 2005 Uni Hamburg Claudius Herder, Justus Winter 4herder@informatik.uni-hamburg.de, 4winter@informatik.uni-hamburg.de
Analyse der logischen Systemarchitektur und Spezifikation der technischen Systemarchitektur. Kernprozess zur System- und Software- Entwicklung
 der Benutzeranforderungen & der logischen zur System- und Software- Entwicklung Anwendungsfälle Akzeptanztest & Systemtest der logischen & der technischen Kalibrierung Integrationstest des Systems Integration
der Benutzeranforderungen & der logischen zur System- und Software- Entwicklung Anwendungsfälle Akzeptanztest & Systemtest der logischen & der technischen Kalibrierung Integrationstest des Systems Integration
Methoden der agilen Softwareentwicklung für eingebettete Systeme
 Seminarvortrag Methoden der agilen Softwareentwicklung für eingebettete Systeme Lisa Krause Aachen, 27.01.2010 Inhaltsübersicht Motivation Einführung in die Softwaretechnik - Ziele - Traditionelle Prozessmodelle
Seminarvortrag Methoden der agilen Softwareentwicklung für eingebettete Systeme Lisa Krause Aachen, 27.01.2010 Inhaltsübersicht Motivation Einführung in die Softwaretechnik - Ziele - Traditionelle Prozessmodelle
Zwischenpräsentation zur Diplomarbeit DES-Mesh Knotenlokalisierung mittels AFL- Algorithmus
 Zwischenpräsentation zur Diplomarbeit DES-Mesh Knotenlokalisierung mittels AFL- Algorithmus Steffen Gliech Computer Systems and Telematics Institute of Computer Science Freie Universität Berlin http://cst.mi.fu-berlin.de
Zwischenpräsentation zur Diplomarbeit DES-Mesh Knotenlokalisierung mittels AFL- Algorithmus Steffen Gliech Computer Systems and Telematics Institute of Computer Science Freie Universität Berlin http://cst.mi.fu-berlin.de
BEWEGUNGSANALYSE IN REHABILITATION UND SPORTMEDIZIN
 BEWEGUNGSANALYSE IN REHABILITATION UND SPORTMEDIZIN Kooperative Promotion TU Freiberg, HTW Dresden Prof. Dr. Ing. Bernhard Jung, Prof. Dr. Markus Wacker Dipl. Inf. (FH) Loreen Pogrzeba 1 07.06.2012 Berührungslose
BEWEGUNGSANALYSE IN REHABILITATION UND SPORTMEDIZIN Kooperative Promotion TU Freiberg, HTW Dresden Prof. Dr. Ing. Bernhard Jung, Prof. Dr. Markus Wacker Dipl. Inf. (FH) Loreen Pogrzeba 1 07.06.2012 Berührungslose
Hilscher Gesellschaft für Systemautomation mbh Intelligente Lösungen für die industrielle Kommunikation
 Holger Pfrommer Gruppenleiter netanalyzer Hilscher Gesellschaft für Systemautomation mbh Intelligente Lösungen für die industrielle Kommunikation www.hilscher.com netscope für LabVIEW Intelligente Prozessdatenerfassung
Holger Pfrommer Gruppenleiter netanalyzer Hilscher Gesellschaft für Systemautomation mbh Intelligente Lösungen für die industrielle Kommunikation www.hilscher.com netscope für LabVIEW Intelligente Prozessdatenerfassung
RatSLAM. Torben Becker. 24. Mai HAW Hamburg
 HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
Annährungssensoren. Induktive Sensoren. Kapazitive Sensoren. Ultraschall-Sensoren. Optische Anährungssensoren
 Annährungssensoren Zum Feststellen der Existenz eines Objektes innerhalb eines bestimmten Abstands. In der Robotik werden sie für die Nah-Gebiets-Arbeit, Objekt-Greifen oder Kollisionsvermeidung verwendet.
Annährungssensoren Zum Feststellen der Existenz eines Objektes innerhalb eines bestimmten Abstands. In der Robotik werden sie für die Nah-Gebiets-Arbeit, Objekt-Greifen oder Kollisionsvermeidung verwendet.
Industrie 4.0. Der Weg zur Smart Factory - von der Analyse bis zur Umsetzung SEITE 1
 Industrie 4.0 Der Weg zur Smart Factory - von der Analyse bis zur Umsetzung SEITE 1 Agenda Produzierendes Gewerbe im Wandel CANCOM Industrial Solutions Production IT Services Projekte / Use Cases (Lackieranlage,
Industrie 4.0 Der Weg zur Smart Factory - von der Analyse bis zur Umsetzung SEITE 1 Agenda Produzierendes Gewerbe im Wandel CANCOM Industrial Solutions Production IT Services Projekte / Use Cases (Lackieranlage,
SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE. www.scan-go.eu www.shop.laserscanning-europe.com V.02.2014
 SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE V.02.2014 www.scan-go.eu www.shop.laserscanning-europe.com SCAN&GO SYSTEM (PATENTRECHTLICH GESCHÜTZT) DIE NEUE VERMESSUNGSTECHNOLOGIE Scan&Go ist eine neue Methode
SCAN&GO DIE NEUE VERMESSUNGSTECHNOLOGIE V.02.2014 www.scan-go.eu www.shop.laserscanning-europe.com SCAN&GO SYSTEM (PATENTRECHTLICH GESCHÜTZT) DIE NEUE VERMESSUNGSTECHNOLOGIE Scan&Go ist eine neue Methode
Hauptseminar Roboternavigation. Kartenaufbau nach Thrun
 Hauptseminar Roboternavigation Kartenaufbau nach Thrun Hannes Keil keil@in.tum.de 18. Januar 2002 Überblick Kartenaufbau nach Thrun Überblick 1. Einführung in den Kartenbau 2. Einführung in den Aufbau
Hauptseminar Roboternavigation Kartenaufbau nach Thrun Hannes Keil keil@in.tum.de 18. Januar 2002 Überblick Kartenaufbau nach Thrun Überblick 1. Einführung in den Kartenbau 2. Einführung in den Aufbau
Auswertung von Bilddaten aus UAV Flügen Von der klassischen Aerotriangulation zum Dense Image. Matching
 Auswertung von Bilddaten aus UAV Flügen Von der klassischen Aerotriangulation zum Dense Image Rainer Brechtken Rouven Borchert Heinz Jürgen Przybilla Rene Marcel Roderweiß Matching Gliederung Einleitung
Auswertung von Bilddaten aus UAV Flügen Von der klassischen Aerotriangulation zum Dense Image Rainer Brechtken Rouven Borchert Heinz Jürgen Przybilla Rene Marcel Roderweiß Matching Gliederung Einleitung
Presseinformation. KEBA auf der Motek 2008 Stand 7522 in Halle 7
 Presseinformation KEBA auf der Motek 2008 Stand 7522 in Halle 7 Pressekontakt Thomas Ameseder, Dipl.-Ing. (FH). Marketing Kommunikation, Industrieautomation KEBA AG Gewerbepark Urfahr, A-4041 Linz Telefon:
Presseinformation KEBA auf der Motek 2008 Stand 7522 in Halle 7 Pressekontakt Thomas Ameseder, Dipl.-Ing. (FH). Marketing Kommunikation, Industrieautomation KEBA AG Gewerbepark Urfahr, A-4041 Linz Telefon:
Teach-In für die 3D-Scan Akquise mit einem Roboter. Teach-In für die 3D-Scanakquise mit einem mobilen Roboter
 Teach-In für die 3D-Scan Akquise mit einem Roboter DoritStruckmeier, Borrmann Dorit Oldenburger 2017 Oliver Borrmann,3D-Tage Andreas Nüchter 1 Zielsetzung der Arbeit Ein mobiler Roboter fährt einen angelernten
Teach-In für die 3D-Scan Akquise mit einem Roboter DoritStruckmeier, Borrmann Dorit Oldenburger 2017 Oliver Borrmann,3D-Tage Andreas Nüchter 1 Zielsetzung der Arbeit Ein mobiler Roboter fährt einen angelernten
Agenda. RiskViz RiskViz Das Konsortium Weiterführende Informationen. Internetweite Suche Demonstration Rechtliche Fragestellungen.
 Agenda Das Konsortium Weiterführende Informationen Internetweite Suche Demonstration Rechtliche Fragestellungen Innere Suche Laboraufbau, um Scanverträglichkeit zu evaluieren Cyberversicherung als Beitrag
Agenda Das Konsortium Weiterführende Informationen Internetweite Suche Demonstration Rechtliche Fragestellungen Innere Suche Laboraufbau, um Scanverträglichkeit zu evaluieren Cyberversicherung als Beitrag
Dipl.-Ing. (FH) Oliver Vauderwange
 Oliver Vauderwange") Dipl.-Ing. (FH) Oliver Vauderwange Raum: D324 Badstraße 24 77652 Offenburg 0781 205-4608 oliver.vauderwange@hsoffenburg.de Auf Anfrage Funktion Fakultät Medien und Informationswesen (M+I), Akad. Mitarbeiter/in
Dipl.-Ing. (FH) Oliver Vauderwange Raum: D324 Badstraße 24 77652 Offenburg 0781 205-4608 oliver.vauderwange@hsoffenburg.de Auf Anfrage Funktion Fakultät Medien und Informationswesen (M+I), Akad. Mitarbeiter/in
TopScan GmbH. Mobile Laser Scanning
 TopScan GmbH Mobile Laser Scanning Ein neues Verfahren zur Bestandsaufnahme TopScan Gesellschaft zur Erfassung topographischer Information mbh Christian Wever Düsterbergstr. 5 48432 Rheine Rheine, 2003
TopScan GmbH Mobile Laser Scanning Ein neues Verfahren zur Bestandsaufnahme TopScan Gesellschaft zur Erfassung topographischer Information mbh Christian Wever Düsterbergstr. 5 48432 Rheine Rheine, 2003
Ein Ansatz zum modellgetriebenen Integrationstest von EJB-basierten Informationssystemen
 1 / 30 Ein Ansatz zum modellgetriebenen Integrationstest von EJB-basierten Informationssystemen Zwischenvortrag zur Diplomarbeit Steffen Conrad (235183) Research Group Software Construction RWTH Aachen
1 / 30 Ein Ansatz zum modellgetriebenen Integrationstest von EJB-basierten Informationssystemen Zwischenvortrag zur Diplomarbeit Steffen Conrad (235183) Research Group Software Construction RWTH Aachen
XGraphic Ingenieurgesellschaft mbh Software nach Maß für die Rohstoffindustrie
 XGraphic Ingenieurgesellschaft mbh Software nach Maß für die Rohstoffindustrie Professor Dr.-Ing. Tilman Küpper, Technischer Geschäftsführer und Maik Hünefeld, Management Assistant der XGraphic Ingenieurgesellschaft
XGraphic Ingenieurgesellschaft mbh Software nach Maß für die Rohstoffindustrie Professor Dr.-Ing. Tilman Küpper, Technischer Geschäftsführer und Maik Hünefeld, Management Assistant der XGraphic Ingenieurgesellschaft
Fakultät Informatik» Institut für Angewandte Informatik» Lehrstuhl für Technische Informationssysteme. Agentensysteme in der Automation
 Fakultät Informatik» Institut für Angewandte Informatik» Lehrstuhl für Technische Informationssysteme Agentensysteme in der Automation Mike Gißrau Hauptseminar Technische Informationssysteme 20.06.2008
Fakultät Informatik» Institut für Angewandte Informatik» Lehrstuhl für Technische Informationssysteme Agentensysteme in der Automation Mike Gißrau Hauptseminar Technische Informationssysteme 20.06.2008
»DIGITALISIERUNG IN BINNENHÄFEN«
 »DIGITALISIERUNG IN BINNENHÄFEN«Trends und Potentiale für den Güterverkehr Prof. Dr.-Ing. Uwe Clausen Hamburg, 09.11.2016 Fraunhofer Seite 1 Neue Herausforderungen für den Verkehr Anforderungen an saubere
»DIGITALISIERUNG IN BINNENHÄFEN«Trends und Potentiale für den Güterverkehr Prof. Dr.-Ing. Uwe Clausen Hamburg, 09.11.2016 Fraunhofer Seite 1 Neue Herausforderungen für den Verkehr Anforderungen an saubere
Inhaltsverzeichnis. Georg Stark. Robotik mit MATLAB ISBN: Weitere Informationen oder Bestellungen unter
 Inhaltsverzeichnis Georg Stark Robotik mit MATLAB ISBN: 978-3-446-41962-9 Weitere Informationen oder Bestellungen unter http://www.hanser.de/978-3-446-41962-9 sowie im Buchhandel. Carl Hanser Verlag, München
Inhaltsverzeichnis Georg Stark Robotik mit MATLAB ISBN: 978-3-446-41962-9 Weitere Informationen oder Bestellungen unter http://www.hanser.de/978-3-446-41962-9 sowie im Buchhandel. Carl Hanser Verlag, München
Erfassung untertägiger Hohlräume mit dem IPS-System bei der RAG Aktiengesellschaft Volker Spreckels, Andreas Schlienkamp
 Erfassung untertägiger Hohlräume mit dem IPS-System bei der Volker Spreckels, Andreas Schlienkamp IPS - Forschung und Entwicklung (FuE) Bei DLR entwickelt für Indoor-Navigation IPS = Integrated Positioning
Erfassung untertägiger Hohlräume mit dem IPS-System bei der Volker Spreckels, Andreas Schlienkamp IPS - Forschung und Entwicklung (FuE) Bei DLR entwickelt für Indoor-Navigation IPS = Integrated Positioning
Heinrich-von-Brentano-Schule: Intelligente Beleuchtung macht Schule. Siteco. Main-Taunus-Kreis
 Heinrich-von-Brentano-Schule: Intelligente Beleuchtung macht Schule Siteco Main-Taunus-Kreis Heinrich-von-Brentano-Schule: Intelligente Beleuchtung macht Schule BESCHREIBUNG Ausgangssituation - 50 Stück
Heinrich-von-Brentano-Schule: Intelligente Beleuchtung macht Schule Siteco Main-Taunus-Kreis Heinrich-von-Brentano-Schule: Intelligente Beleuchtung macht Schule BESCHREIBUNG Ausgangssituation - 50 Stück
Industrielle Herausforderungen in Embedded Systems
 StreamUnlimited ~ 2005 Spin-off vom Philips Audio/Video Innovation Center Wien Industrielle Herausforderungen in StreamUnlimited Engineering GmbH, CTO ~ Innovative Embedded F&E ~ Elektronik ~ Software
StreamUnlimited ~ 2005 Spin-off vom Philips Audio/Video Innovation Center Wien Industrielle Herausforderungen in StreamUnlimited Engineering GmbH, CTO ~ Innovative Embedded F&E ~ Elektronik ~ Software
Wearable Computing im Gesundheitswesen
 Wearable Computing im Gesundheitswesen Dipl.-Ing. Dr. techn. Wolfgang Vorraber, Univ.-Prof. Dipl.-Ing. Dr. techn. Siegfried Vössner, Dipl.-Ing. Dietmar Neubacher, Technische Universität Graz, Österreich
Wearable Computing im Gesundheitswesen Dipl.-Ing. Dr. techn. Wolfgang Vorraber, Univ.-Prof. Dipl.-Ing. Dr. techn. Siegfried Vössner, Dipl.-Ing. Dietmar Neubacher, Technische Universität Graz, Österreich
Motorik. Thomas Röfer
 Motorik Thomas Röfer Robotertypen Roboter mit Rädern Gelenkt, differentiell, synchron, omnidirektional Laufmaschinen Statisch und dynamisch stabil Ein-, zwei-, vier- und sechsbeinig Kognitive Robotik I
Motorik Thomas Röfer Robotertypen Roboter mit Rädern Gelenkt, differentiell, synchron, omnidirektional Laufmaschinen Statisch und dynamisch stabil Ein-, zwei-, vier- und sechsbeinig Kognitive Robotik I
Strukturvariable Regelung eines humanoiden Roboterarmes mit bildgebenden und Kraft-Momenten-Sensoren. Bodmar Diestel-Feddersen, Giulio Milighetti
 mit bildgebenden und Kraft-Momenten-Sensoren Bodmar Diestel-Feddersen, Giulio Milighetti Inhalt 1. Motivation und Aufgabenstellung 2. Multisensorielles Regelungskonzept zum Fallbeispiel Peg-In-Hole 3.
mit bildgebenden und Kraft-Momenten-Sensoren Bodmar Diestel-Feddersen, Giulio Milighetti Inhalt 1. Motivation und Aufgabenstellung 2. Multisensorielles Regelungskonzept zum Fallbeispiel Peg-In-Hole 3.
Out of the box: Flexible fahrerlose Transportfahrzeuge für den Mittelstand
 Institut für Integrierte Produktion Hannover Out of the box: Flexible fahrerlose Transportfahrzeuge für den Mittelstand Dr. Björn Eilert, IPH - Institut für Integrierte Produktion ggmbh BVL-Forum Solution
Institut für Integrierte Produktion Hannover Out of the box: Flexible fahrerlose Transportfahrzeuge für den Mittelstand Dr. Björn Eilert, IPH - Institut für Integrierte Produktion ggmbh BVL-Forum Solution
Digitale Lehr-Lernsettings mit OER in allgemein- und berufsbildenden Schulen
 Digitale Lehr-Lernsettings mit OER in allgemein- und berufsbildenden Schulen Prof. Dr. Hermann Körndle, TU Dresden Open Educational Resources (OER) als Weg zur nachhaltigen Verbreitung von Projektergebnissen
Digitale Lehr-Lernsettings mit OER in allgemein- und berufsbildenden Schulen Prof. Dr. Hermann Körndle, TU Dresden Open Educational Resources (OER) als Weg zur nachhaltigen Verbreitung von Projektergebnissen
Zukunft der Personalarbeit Teilprojekt HR-IT-Strategie/-Programme. Deutsche Bahn AG Thomas Glück TP- C
 Zukunft der Personalarbeit Teilprojekt HR-IT-Strategie/-Programme Deutsche Bahn AG Thomas Glück TP- C 23.11.2016 Thomas.Glueck@deutschebahn.com Das Projekt Zukunft der Personalarbeit (ZdP) im Rahmen von
Zukunft der Personalarbeit Teilprojekt HR-IT-Strategie/-Programme Deutsche Bahn AG Thomas Glück TP- C 23.11.2016 Thomas.Glueck@deutschebahn.com Das Projekt Zukunft der Personalarbeit (ZdP) im Rahmen von
Session 10 Energieeffizienz intelligenter biomechatronischer Systeme (O.T.W.-Orthopädietechnik Winkler)
") Session 10 (O.T.W.-Orthopädietechnik Winkler) 06. Juli 2016 Bielefeld www.its-owl.de Agenda Abschlusspräsentation Einführung Zielsetzung Ergebnisse Resümee und Ausblick it s OWL Clustermanagement GmbH
Session 10 (O.T.W.-Orthopädietechnik Winkler) 06. Juli 2016 Bielefeld www.its-owl.de Agenda Abschlusspräsentation Einführung Zielsetzung Ergebnisse Resümee und Ausblick it s OWL Clustermanagement GmbH
Augmented Reality. Dresden, 22. Januar. 2013
 Fakultät Informatik Institut für Software- und Multimediatechnik Juniorprofessur Software Engineering Ubiquitärer Systeme Dresden, 22. Januar. 2013 2 Gliederung Einführung Interaktion Präsentation Quellen
Fakultät Informatik Institut für Software- und Multimediatechnik Juniorprofessur Software Engineering Ubiquitärer Systeme Dresden, 22. Januar. 2013 2 Gliederung Einführung Interaktion Präsentation Quellen
Hochschule Karlsruhe Karlsruhe, Baden-Würrtemberg, 6000? Studenten
 Hochschule Karlsruhe Karlsruhe, Baden-Würrtemberg, 6000? Studenten Fachschaft Informatik vertritt 600 Studenten 18 aktive + ca 20 neue Aktive Informatik Bachelor 116 ca 50 Informatik Master 30? HSKA KIT
Hochschule Karlsruhe Karlsruhe, Baden-Würrtemberg, 6000? Studenten Fachschaft Informatik vertritt 600 Studenten 18 aktive + ca 20 neue Aktive Informatik Bachelor 116 ca 50 Informatik Master 30? HSKA KIT
Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo
 Geodäsie 4.0 - was erwartet uns Geodäten? Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo Xiaoguang Luo Leica Geosystems AG, Heerbrugg Seminar an der HFT Stuttgart,
Geodäsie 4.0 - was erwartet uns Geodäten? Entwicklung der Messtechnik am Beispiel von hochpräziser RTK-Positionierung mittels Galileo Xiaoguang Luo Leica Geosystems AG, Heerbrugg Seminar an der HFT Stuttgart,
Mensch-Roboter-Kollaboration
 Mensch-Roboter-Kollaboration Der Weg zur sicheren Roboterapplikation mit Pilz 5. Robotics Kongress Jochen Vetter Hannover, 17. Februar 2016 Vorstellung Referent Jochen Vetter, Dipl.-Ing. (FH) @ Pilz GmbH
Mensch-Roboter-Kollaboration Der Weg zur sicheren Roboterapplikation mit Pilz 5. Robotics Kongress Jochen Vetter Hannover, 17. Februar 2016 Vorstellung Referent Jochen Vetter, Dipl.-Ing. (FH) @ Pilz GmbH
Entwicklung eines LAP-Sensors zur Erfassung der mikrobiellen Aktivität in Abhängigkeit von Nährstoffkonzentrationen
 Entwicklung eines LAP-Sensors zur Erfassung der mikrobiellen Aktivität in Abhängigkeit von Nährstoffkonzentrationen Dr. Simone Groebel 26.03.2014 FH AACHEN UNIVERSITY OF APPLIED SCIENCES Gliederung 1.
Entwicklung eines LAP-Sensors zur Erfassung der mikrobiellen Aktivität in Abhängigkeit von Nährstoffkonzentrationen Dr. Simone Groebel 26.03.2014 FH AACHEN UNIVERSITY OF APPLIED SCIENCES Gliederung 1.
Neue Wartungs- und Instandhaltungskonzepte durch Condition Monitoring
 Neue Wartungs- und Instandhaltungskonzepte durch Condition Monitoring 05.04.2011 Roman Cecil ARGO-HYTOS Condition Monitoring / Page 1 Motivation für Condition Monitoring Ursachen für Ausfälle am Beispiel
Neue Wartungs- und Instandhaltungskonzepte durch Condition Monitoring 05.04.2011 Roman Cecil ARGO-HYTOS Condition Monitoring / Page 1 Motivation für Condition Monitoring Ursachen für Ausfälle am Beispiel
Entwurf autonomer mobiler Systeme
 Entwurf autonomer mobiler Systeme NI LabVIEW Robotics als Standardhard- und - softwareplattform für mobile Robotersysteme Jochen Klier AE-Specialists Manager Agenda Herausforderungen in der Robotik LabVIEW
Entwurf autonomer mobiler Systeme NI LabVIEW Robotics als Standardhard- und - softwareplattform für mobile Robotersysteme Jochen Klier AE-Specialists Manager Agenda Herausforderungen in der Robotik LabVIEW
Tag der Mechatronik September 2008 am CAMPUS 02, Graz
 Tag der Mechatronik 2008 22. September 2008 am CAMPUS 02, Graz Montag, 22. September 2008, ab l3 Uhr Saal Steiermark, FH CAMPUS 02, Graz HERZLICH WILLKOMMEN AM ÖSTERREICHISCHEN TAG DER MECHATRONIK 2008!
Tag der Mechatronik 2008 22. September 2008 am CAMPUS 02, Graz Montag, 22. September 2008, ab l3 Uhr Saal Steiermark, FH CAMPUS 02, Graz HERZLICH WILLKOMMEN AM ÖSTERREICHISCHEN TAG DER MECHATRONIK 2008!
Plancal und Trimble CAD/CAE Software- und Positionierlösungen für die Gebäudetechnik. Velden, Juni 2012
 Plancal und Trimble CAD/CAE Software- und Positionierlösungen für die Gebäudetechnik Velden, Juni 2012 Inhalt Unternehmensübersicht Plancal und Trimble Herausforderungen in der Gebäudetechnik Positionierlösungen
Plancal und Trimble CAD/CAE Software- und Positionierlösungen für die Gebäudetechnik Velden, Juni 2012 Inhalt Unternehmensübersicht Plancal und Trimble Herausforderungen in der Gebäudetechnik Positionierlösungen
Multitouch & Tangible Interaction
 Multitouch & Tangible Interaction Tangible Interfaces für IGD-TouchTable Exploration verschiedener physischer Objekte, als anfassbare Schnittstelle digitale Informationen Controler-Elemente digit./tangible
Multitouch & Tangible Interaction Tangible Interfaces für IGD-TouchTable Exploration verschiedener physischer Objekte, als anfassbare Schnittstelle digitale Informationen Controler-Elemente digit./tangible
Digitalisierung in der Agrartechnik. Dr. Thomas Engel, Manager Technology Innovation Strategy
 Digitalisierung in der Agrartechnik Dr. Thomas Engel, Manager Technology Innovation Strategy Inhalt Herausforderungen für die Landwirtschaft Automatische Lenksysteme und autonomes Fahren Teilschlagtechnik
Digitalisierung in der Agrartechnik Dr. Thomas Engel, Manager Technology Innovation Strategy Inhalt Herausforderungen für die Landwirtschaft Automatische Lenksysteme und autonomes Fahren Teilschlagtechnik
Institut für angewandte Informationstechnologie (InIT)
") School of Engineering Institut für angewandte Informationstechnologie (InIT) We ride the information wave Zürcher Fachhochschule www.init.zhaw.ch Forschung & Entwicklung Institut für angewandte Informationstechnologie
School of Engineering Institut für angewandte Informationstechnologie (InIT) We ride the information wave Zürcher Fachhochschule www.init.zhaw.ch Forschung & Entwicklung Institut für angewandte Informationstechnologie
3D Roboter Vision Innovativ durch integrierte Technologie FANUC TIM JUERGENS
 FACTORY AUTOMATION NUMERICAL CONTROL 3D Roboter Vision Innovativ durch integrierte Technologie 2 Inhalt Fanuc Deutschland GmbH Robotics Award 2014 3D Area Sensor Beladen von 3 Werkzeugmaschinen mit Robotern
FACTORY AUTOMATION NUMERICAL CONTROL 3D Roboter Vision Innovativ durch integrierte Technologie 2 Inhalt Fanuc Deutschland GmbH Robotics Award 2014 3D Area Sensor Beladen von 3 Werkzeugmaschinen mit Robotern
SIMATIC PCS 7 V8.2 SIMIT V9. Clever kombiniert: Testen und Trainieren von Automatisierungsprojekten
 SIMATIC PCS 7 V8.2 SIMIT V9 Clever kombiniert: Testen und Trainieren von Automatisierungsprojekten Frei Verwendbar Siemens AG 2016 siemens.com/process-automation Simulation Verwendung Virtuelle Inbetriebnahme:
SIMATIC PCS 7 V8.2 SIMIT V9 Clever kombiniert: Testen und Trainieren von Automatisierungsprojekten Frei Verwendbar Siemens AG 2016 siemens.com/process-automation Simulation Verwendung Virtuelle Inbetriebnahme:
Augmented Reality. (Die Realität fotorealistisch erweitern) Michael Zollhöfer Graphics, Vision, and Video Group
 Michael Zollhöfer Graphics, Vision, and Video Group") Augmented Reality (Die Realität fotorealistisch erweitern) Michael Zollhöfer Graphics, Vision, and Video Group gvv.mpi-inf.mpg.de Support / funding from: ERC Starting Grant CapReal Überblick Was ist Augmented
Augmented Reality (Die Realität fotorealistisch erweitern) Michael Zollhöfer Graphics, Vision, and Video Group gvv.mpi-inf.mpg.de Support / funding from: ERC Starting Grant CapReal Überblick Was ist Augmented
04.10.2012 ANHANG 1: KATALOGE DER WAHLPFLICHTMODULE Informatik (Master of Science) MPO 2010 Studienrichtung Praktische Informatik
 MPO 2010 Studienrichtung Praktische Informatik") Informatik (Master of Science) Studienrichtung Praktische Informatik Autonome Systeme Diskrete Signalverarbeitung Eingebettete Systeme Entwicklung integrierter Systeme Weiterführende Konzepte zum Betrieb
Informatik (Master of Science) Studienrichtung Praktische Informatik Autonome Systeme Diskrete Signalverarbeitung Eingebettete Systeme Entwicklung integrierter Systeme Weiterführende Konzepte zum Betrieb