Antriebstechnik. Dirk Söffker
|
|
|
- Hedwig Dunkle
- vor 6 Jahren
- Abrufe
Transkript
1 Veranstaltung Dirk Söffker Lehrstuhl Steuerung, Regelung und Systemdynamik Fakultät für Ingenieurwissenschaften Universität Duisburg-Essen VE 0: Formales/Hinweise Dirk Söffker, SRS, U DuE -1-
2 Inhalt der Veranstaltung - Voraussetzungen - Inhalte - Grundaufbau der weiteren Veranstaltungen SRS (PO08 / Master) Termin und Ort Wenige Termine Termine Di, aber: Uhr MB 244 Grundidee des Veranstaltungsaufbaues - Interaktives Skript mit Literaturhinweisen, Passwort: - Fachbücher/Aufsätze >> Bibliothek - >> Verwendung der Unterlagen ist auf die Nutzung im Rahmen dieser Veranstaltung beschränkt, es gilt das Urheberrecht der Autoren. <<< Vorlesung/Übung - Übung folgt der Veranstaltung direkt Sprechstunden - Alle betreuenden Personen direkt ansprechen (Do Uhr, Lehrstuhl SRS) - Sebastian Wirtz, M.Sc., Dipl.-Ing. Georg Hägele Übungsaufgaben - Beispiel-/Übungsaufgaben Prüfung schriftlich, wird bekanntgegeben VE 0: Formales/Hinweise Dirk Söffker, SRS, U DuE -2-

3 VE 0: Formales/Hinweise Dirk Söffker, SRS, U DuE -3-

4 VE 0: Formales/Hinweise Dirk Söffker, SRS, U DuE -4-

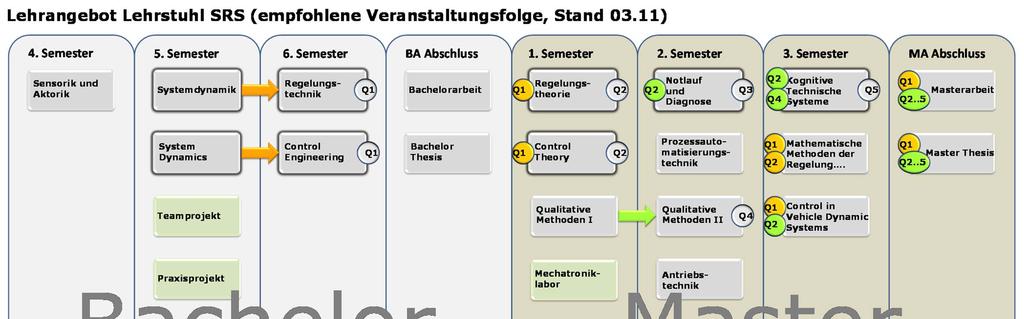
5 Einbettung der Veranstaltung in die Forschungsschwerpunkte: VE 0: Formales/Hinweise Dirk Söffker, SRS, U DuE -5-
 und - Bestandteil von offenen/geschlossenen Regelkreisen, wenn die Systemdynamik beeinflusst werden soll (muss).")
6 1.1 Maschinenbauliche/mechatronische Systeme als komplexe Systeme, Anlagen und Prozesse - Aktorik ist zentraler - Bestandteil maschinenbaulicher Systeme/Prozesse/Produkte, wenn Energie/Leistung übertragen werden muss (geregelt/ungeregelt) und - Bestandteil von offenen/geschlossenen Regelkreisen, wenn die Systemdynamik beeinflusst werden soll (muss). VE 1: Einführung Dirk Söffker, SRS, U DuE -1-
7 1.2 Aktorik: Energiewandlung und resultierende Unterscheidungen 1) Beeinflussen von Energie-/Leistungsflüssen - Wandlung der Energie > Energiewandler - Beeinflussen zur Verfügung stehender Energie (z. B. aus einer Hilfsenergiequelle) > Steller 2) (Steuernde/regelnde) Eingangsgröße - energiearm (Spannungspegel etc.)/ energielos (Information) > Steller/Aktor - energiereich > Wandler/Umformer Quelle: Steinhilper/Sauer VE 1: Einführung Dirk Söffker, SRS, U DuE Quelle: Steinhilper/Sauer -2- Quelle: Steinhilper/Sauer
8 1.3 Aktoren im offenen/geschlossenen Regelkreis Betrachtungsebenen 1) Realisierung von (statischen) physikalischen Effekten > Funktion -Energie/Leistung - Phys. Größen (Kraft / Weg / Spannung / Druck / ) 2) Dynamische Realisierung der Funktion > Übertragungselement - Abstraktes Verhalten im Zeit- und Frequenzbereich - Lineares / Nichtlineares Verhalten VE 1: Einführung Dirk Söffker, SRS, U DuE -3- Quelle: Steinhilper/Sauer
. Quelle: Irlinger 3.")
9 1.4 Aktorisch nutzbare Wirkprinzipien I (hier: elektromechanische Aktoren, typisch, Auswahl) 1. Wirkprinzip: Körper mit gleicher elektrischer Ladung stoßen sich gegenseitig ab (Coulomb). Quelle: Irlinger 2. Wirkprinzip: Stromdurchflossene Leiter im Magnetfeld erfahren eine Kraft (Biot-Savard). Quelle: Irlinger 3. Wirkprinzip: Körper mit gleicher magnetischer Polung stoßen sich gegenseitig ab (Coulomb). Quelle: Irlinger VE 1: Einführung Dirk Söffker, SRS, U DuE -4- Quelle: Steinhilper/Sauer
10 Aktorisch nutzbare Wirkprinzipien II (hier: elektromechanische Aktoren, typisch, Auswahl) 4. Wirkprinzip: Asymmetrien im Kristallgitter bestimmter Kristalle führen bei Anlegen äußerer Spannungsfelder zu Verschiebungen (umkehrbar und reversibel) (Curie). Quelle: Irlinger 5. Wirkprinzip: Ausgewählte Legierungen (z. B. Eisen-Nickel) verspannen sich im Magnetfeld und ändern ihre Abmessungen (Joule). Quelle: Irlinger 6. Wirkprinzip: Körper denen sich bei Erwärmung aus (Heron). Quelle: Irlinger VE 1: Einführung Dirk Söffker, SRS, U DuE -5- Quelle: Steinhilper/Sauer
11 1.5 Aktorik: Zusammenhänge hinsichtlich der Integration/Einbindung Früher: Heute: Funktionsrealisierung auf Basis von wirkmechanismenorientierter Vorgehensweise (physik./chem./.) > Energie/Leistung wird gewandelt > Steller/Wandler > Beschreibende Größen sind Signale (> math. Funktionen) > Begriffe: Stelleinrichtung / Steller Funktionsrealisierung auf Basis von Wirkmechanismen, deren zeitliches (dynamisches) Verhalten durch informationstechnische (bzw. energetisch entkoppelte) Größen gesteuert/geregelt werden > Energie/Leistung wird gewandelt > Steller/Wandler > Beschreibende Größen (intern) sind Signale (math. Funktionen) > Steuernde/Regelnde Eingangsgrößen (extern) werden als Information beschrieben > Begriffe: Aktor (wenn Stelleinrichtung/Steller mit entsprechenden Schnittstellen ausgestattet sind, Beispiel: Profibus) Konsequenz: Aktorik beeinflusst Energie-/Stoffflüsse (> Energie). Verhalten der Aktorik wird durch informationsverarbeitende Einheiten beeinflusst. VE 1: Einführung Dirk Söffker, SRS, U DuE -6- Quelle: Steinhilper/Sauer
12 1.6 Aktorik: Klassifizierungsmöglichkeiten Klassifizierung an Hand - der Form der verwendeten (Hilfs-)Energie (Czichos) (elektrisch, fluidisch, thermisch, chemisch) - der Form der verwendeten Wirkprinzips (elektromagnetisch, elektrorheologisch, piezokeramisch,.) - der verwendeten Zwischenenergieform (Wallaschek) (magnetisches Feld, elektrisches Feld, ) - der aktorischen Bewegung (Linearaktor, rotatorischer Aktor, ) - - des grobunterteilten zugrundeliegenden Wirkprinzips und des verbleibendes Restes (Janocha) Klassifizierung von Aktoren (nach Janocha) - Elektronische Aktoren (Dioden, Leistungstransistoren, Thyristoren) - Elektromagnetische Aktoren (Selbst- und fremdgeführte Motoren, Linearmotor, ) - Fluidtechnische Aktoren (Hydraulische Antriebe, pneumatische Antriebe) - Unkonventionelle Aktoren (Bimetalle, memorybasierte Aktoren, elektrorheologische Aktoren, piezoelektrische Aktoren, magnetorestriktive Aktoren, ) VE 1: Einführung Dirk Söffker, SRS, U DuE -7-
13 1.6 Aktorik: Klassifizierungsmöglichkeiten - grafisch Aktorik Konventionelle elektromagnetische Aktorik Konventionelle fluidische Aktorik Unkonventionelle Aktorik Gleichstrom- Motoren Wechsel- Strommotoren Elektromagnete Linearmotoren Hydraulik Pneumatik Fremderregt Selbsterregt Asynchronmotor Synchronmotor piezoelektrisch magnestriktiv thermomechanisch Hydrozylinder Hydromotor VE 1: Einführung Dirk Söffker, SRS, U DuE -8-
14 1.7 Aktorik: Ein-/Anbindung an/in Prozesse/Systeme/Regelkreise Die informationstechnische Realisierung der Ansteuerung geschieht durch - analoge Signale (z. B V Gleichspannung, leistungslos, -5-5 V Gleichspannung, leistungslos, 0-1 V Gleichspannung, leistungslos) > Steller/Stellglied - digitale Signale (z. B. digital I/O n-bit, PWM, ) - digitale Integration I (z. B. durch Integration in ein Bussystem (Profibus, CAN-Bus, Feldbus, ) - digitale Integration II (z. B. durch Integration in ein (offenes) Netzwerk (LAN, WAN, WLAN, ) > Aktor -9- DV-Anbindung Prozess/ System VE 1: Einführung Dirk Söffker, SRS, U DuE Modifiziert nach Irlinger (Quelle)
15 Aktorik: Übersicht Aktorik Konventionelle elektromagnetische Aktorik Konventionelle fluidische Aktorik Unkonventionelle Aktorik Gleichstrom- Motoren Wechsel- Strommotoren Elektromagnete Linearmotoren Hydraulik Pneumatik Fremderregt Selbsterregt Asynchronmotor Synchronmotor piezoelektrisch magnestriktiv thermomechanisch Hydrozylinder Hydromotor -1- VE2-1: Elektromagnetische Aktorik; Dirk Söffker, SRS, U DuE
16 2 Konventionelle elektromagnetische Aktorik 2.1 Begriffe, Definitionen, Grundsätzliches elektrischer Antriebe Ständer = Stator Läufer = Rotor = Anker : feststehender Teil des Motor : rotierender Teil des Motors Kommutator : Stromwender/Umrichter (wechselt die Stromrichtung) Abb.: Ständer-Läufer-Anordnungen (Janocha) Grundprinzip: Quelle: Janocha Umwandlung elektrischer in mechanische Energie durch Nutzung elektomagnetischer Felder (Abstoßung zweier Felder) > Innenläufer-/Außenläufermotoren - typisch: Innenläufermotor (kostengünstig, geringes Läuferträgheitsmoment, etc.) > Realisierung elektromagnetischer Felder durch - Permanentmagnete (PM) - elektromagnetische Felder (erzeugt durch Spulen) VE2-1: Elektromagnetische Aktorik; Dirk Söffker, SRS, U DuE -2-
spulenstromes/Läufermomentes - Kommutator (Umschalter) koppelt mechanisch die Umschaltung > Selbstgeführte Motoren (mit")
17 2.1 Begriffe, Definitionen, Grundsätzliches elektrischer Antriebe II Grundprinzip: Umwandlung elektrischer in mechanische Energie durch Nutzung elektromagnetischer Felder Beispiel: Gleichstrommotor Quelle: Williams Unterscheidungskriterium: Erzeugung/Schaltung des (Anker-)spulenstromes/Läufermomentes - Kommutator (Umschalter) koppelt mechanisch die Umschaltung > Selbstgeführte Motoren (mit mechanischem Kommutator) - Kommutator (Umschalter) koppelt elektrisch die Umschaltung > Selbstgeführte Motoren (mit elektronischem Kommutator) - Von außen zugeführtes Wechsel-/Drehstromfeld generiert Ströme (Asynchronmotor) oder Magnetfelder (Synchronmotor) > Fremdgeführte Motoren -3- VE2-1: Elektromagnetische Aktorik; Dirk Söffker, SRS, U DuE
 Die Spulenenden sind kurzgeschlossen, es wird kein Drehmoment erzeugt. Der Rotor bleibt auf Grund seiner Trägheit in Bewegung.")
18 2.1 Begriffe, Definitionen, Grundsätzliches elektrischer Antriebe II Mechanismus Kommutierung (bei Gleichstrommotoren): i) Strom fließt über Bürste, Spule, Bürste. Im Rotor wird ein Drehmoment in Drehrichtung erzeugt. ii) Die Spulenenden sind kurzgeschlossen, es wird kein Drehmoment erzeugt. Der Rotor bleibt auf Grund seiner Trägheit in Bewegung. iii) Der Strom fließt auf Grund der gedrehten Kommutierung in die andere Richtung (der Rotor ist auch gedreht). Im Rotor wird ein Drehmoment in Drehrichtung erzeugt. Optimierung: Verteilung mehrerer Spulen am Rotorumfang, Erzeugung gleichmäßigerer Momente Probleme: - Drehzahlabhängiges Bürstengeräusch - Verschleiß der Kohlebürsten (Schaltfunken) - Funkstörungen - Pulsierender Magnetfluss - Drehzahlbegrenzung Quelle: Gerling -4- VE2-1: Elektromagnetische Aktorik; Dirk Söffker, SRS, U DuE
 - Gleichstrommotor mit elektronischer Kommutierung (Stator: PM) (EC-Motor bzw.")
 (Universalmotor) Prinzipieller Aufbau I Quelle: Gerling Quelle: Gerling -5- VE2-1: Elektromagnetische")
19 2.2 Selbstgeführte Motoren Unterschiedliche Ausführungen - Gleichstrommotor mit mechanischer Kommutierung (Stator: PM) - Gleichstrommotor mit elektronischer Kommutierung (Stator: PM) (EC-Motor bzw. Gleichstrommotor mit bürstenloser Kommutierung) - Gleichstrommotor mit mechanischer Kommutierung (Stator: EM mit Spule) (Universalmotor) Prinzipieller Aufbau I Quelle: Gerling Quelle: Gerling -5- VE2-1: Elektromagnetische Aktorik; Dirk Söffker, SRS, U DuE
 (ortsfestes StatorMF (PM), geschaltetes LäuferMF (EM)) (wird zeitweilig auch als fremderregte GM bezeichnet,")
 (schaltbares StatorMF (EM), drehendes LäuferMF (PM)) VE2-1: Elektromagnetische Aktorik; Dirk Söffker, SRS, U DuE Kommutator-Reihenschluss- Motor (Universalmotor")
20 2.2 Selbstgeführte Motoren Bei selbstgeführten Motoren wird die Spannung des generierten Feldes durch die Läuferstellung selbständig (d.h. durch die Läuferstellung) erzeugt. Verschiedene Bauformen: Gleichstrommotor mit mechanischem Kommutator (GM mit Nebenschluss) (ortsfestes StatorMF (PM), geschaltetes LäuferMF (EM)) (wird zeitweilig auch als fremderregte GM bezeichnet, weil die Statorwicklung als PM das Feld einprägt) Quelle: Steinhilper Quelle: Steinhilper Quelle: Steinhilper Gleichstrommotor mit elektronischem Kommutator (GM mit Nebenschluss) (bürstenloser GM; EC-Motor (electronically commutated) (schaltbares StatorMF (EM), drehendes LäuferMF (PM)) VE2-1: Elektromagnetische Aktorik; Dirk Söffker, SRS, U DuE Kommutator-Reihenschluss- Motor (Universalmotor (Allstrommotor)) Gleichstrommotor mit mechanischem Kommutator (ortsfestes StatorMF (EM)) Erregerwicklung ist mit Läuferwicklung in Reihe geschaltet > Betrieb mit Gleichstrom / Wechselstrom) -6-
21 2.2 Selbstgeführte Motoren Verschiedene Bauformen: Gleichstrommotor mit mechanischem Kommutator Regelung über Vorwiderstand des Läuferstromes (> Verlustleistung) Drehmoment proportional zum Strom (steifes Verhalten) Vorteile permanenterregte GM: - geringere Stromaufnahme, höherer Wirkungsgrad (Wicklung fehlt) - keine Kurzschlüsse o.ä. wegen der wegfallenden Wicklung Vorteile elektrisch erregte GM: - höhere Leistungsdichte Gleichstrommotor mit elektronischem Kommutator (bürstenloser GM) Regelung über Leistungshalbleiter winkelabhängig (Hallsensoren) Drehmoment proportional zum Strom (steifes Verhalten) Vorteile GM: - Lineare Drehmoment-/Strom Charakteristik, gutes Regelverhalten, gute Gleichlaufrobustheit Nachteile GM: VE2-1: Elektromagnetische Aktorik; Dirk Söffker, SRS, U DuE - Dynamik und Anlaufmoment begrenzt (mechanischem Komm.), ungünstiger Wärmehaushalt -7- Kommutator-Reihenschluss- Motor (Universalmotor) Regelung über Phasenanschnittsteuerung Hohes Anzugmoment 4-Quadratenbetrieb möglich 4-Quadratenbetrieb möglich 4-Quadratenbetrieb möglich
22 2.3 Grundgleichungen und Kennlinien von GM 2.3. Grundgleichungen GM Elektrisches Ersatzschaltbild: Quelle: Gerling Grundgleichungen: -8- VE2-1: Elektromagnetische Aktorik; Dirk Söffker, SRS, U DuE
23 2.3 Grundgleichungen und Kennlinien von GM Selbstgeführte GM mit Nebenschluss I Elektrisches Ersatzschaltbild: Grundgleichungen: Quelle: Gerling Resultierende Kennlinie: Quelle: Gerling -9- VE2-1: Elektromagnetische Aktorik; Dirk Söffker, SRS, U DuE
24 2.3 Grundgleichungen und Kennlinien von GM Selbstgeführte GM mit Nebenschluss II Quelle: Gerling -10- VE2-1: Elektromagnetische Aktorik; Dirk Söffker, SRS, U DuE
25 2.3 Grundgleichungen und Kennlinien von GM Selbstgeführte GM mit Nebenschluss III Bremsen von GM mit Nebenschluss i) Generatorische Nutzbremsung -11- VE2-1: Elektromagnetische Aktorik; Dirk Söffker, SRS, U DuE
26 ii) Widerstandsbremsen, Kurzschlussbremsen iii) Gegenstrombremsen -12- VE2-1: Elektromagnetische Aktorik; Dirk Söffker, SRS, U DuE
27 2.3 Grundgleichungen und Kennlinien von GM Selbstgeführte GM mit Nebenschluß IV Regelung / Drehzahlsteuerung: i) Vergrößerung Vorwiderstand im Ankerkreis Resultierende Drehmoment- Drehzahlcharakteristik: ii) Verringerung der Erregung Quelle: Gerling VE2-1: Elektromagnetische Aktorik; Dirk Söffker, SRS, U DuE Quelle: Gerling -13-
28 2.3 Grundgleichungen und Kennlinien von GM Selbstgeführte GM mit Nebenschluß V Regelung / Drehzahlsteuerung: iii) Verringerung der Klemmenspannung Resultierende Drehmoment- Drehzahlcharakteristik: Quelle: Gerling -14- VE2-1: Elektromagnetische Aktorik; Dirk Söffker, SRS, U DuE
Sensorik und Aktorik Teil 2: Aktorik. Dirk Söffker
 Veranstaltung Sensorik und Teil 2: Manuskript Dirk Söffker Hinweis 1: Die Zusammenstellung der Lehrinformationen (Vorlesung, Übung, Praktikum) ist nur für den Gebrauch innerhalb dieser Veranstaltung bestimmt
Veranstaltung Sensorik und Teil 2: Manuskript Dirk Söffker Hinweis 1: Die Zusammenstellung der Lehrinformationen (Vorlesung, Übung, Praktikum) ist nur für den Gebrauch innerhalb dieser Veranstaltung bestimmt
Antriebstechnik. Dirk Söffker
 Veranstaltung Antriebstechnik Dirk Söffker Lehrstuhl Steuerung, Regelung und Systemdynamik Fakultät für Ingenieurwissenschaften Universität Duisburg-Essen Hinweis 1: Die Zusammenstellung der Lehrinformationen
Veranstaltung Antriebstechnik Dirk Söffker Lehrstuhl Steuerung, Regelung und Systemdynamik Fakultät für Ingenieurwissenschaften Universität Duisburg-Essen Hinweis 1: Die Zusammenstellung der Lehrinformationen
Schnittbild einer zweipoligen elektrisch erregten Gleichstrommaschine. Rotor der Gleichstrommaschine und eine Windung des Rotors
 Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Abt. Elektrische Energiewandlung Prof. Dr.-Ing. N. Parspour Inhalt 5 Elektrische Maschinen... 1 5.1 Gleichstrommaschinen...
Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Abt. Elektrische Energiewandlung Prof. Dr.-Ing. N. Parspour Inhalt 5 Elektrische Maschinen... 1 5.1 Gleichstrommaschinen...
Elektrotechnik und Elektronik für Maschinenbauer
 Ekbert Hering Rolf Martin Jürgen Gutekunst Joachim Kempkes Elektrotechnik und Elektronik für Maschinenbauer 2. vollständig überarbeitete und aktualisierte Auflage Grundlagen der Elektrotechnik 1 A. 1 Physikalische
Ekbert Hering Rolf Martin Jürgen Gutekunst Joachim Kempkes Elektrotechnik und Elektronik für Maschinenbauer 2. vollständig überarbeitete und aktualisierte Auflage Grundlagen der Elektrotechnik 1 A. 1 Physikalische
Inhaltsverzeichnis. Rainer Hagl. Elektrische Antriebstechnik. ISBN (Buch): ISBN (E-Book):
: ISBN (E-Book):") Inhaltsverzeichnis Rainer Hagl Elektrische Antriebstechnik ISBN (Buch): 978-3-446-43350-2 ISBN (E-Book): 978-3-446-43378-6 Weitere Informationen oder Bestellungen unter http://www.hanser-fachbuch.de/978-3-446-43350-2
Inhaltsverzeichnis Rainer Hagl Elektrische Antriebstechnik ISBN (Buch): 978-3-446-43350-2 ISBN (E-Book): 978-3-446-43378-6 Weitere Informationen oder Bestellungen unter http://www.hanser-fachbuch.de/978-3-446-43350-2
Elektrische Antriebe in der Kältetechnik
 Kapitel 8 Elektrische Antriebe in der Kältetechnik In diesem Kapitel sollen die elektromotorischen Antriebe, die im Kälteanlagenbau eine wichtige Stellung einnehmen, näher betrachtet werden. Einen wesentlichen
Kapitel 8 Elektrische Antriebe in der Kältetechnik In diesem Kapitel sollen die elektromotorischen Antriebe, die im Kälteanlagenbau eine wichtige Stellung einnehmen, näher betrachtet werden. Einen wesentlichen
Elektromotoren. Damit ist der Elektromotor das Gegenstück zum Generator, der Bewegungsenergie in elektrische Energie umwandelt.
 Elektromotoren Elektromotor bezeichnet einen elektromechanischen Wandler, der elektrische Energie in mechanische Energie umwandelt. In Elektromotoren wird die Kraft, - die von einem Magnetfeld auf die
Elektromotoren Elektromotor bezeichnet einen elektromechanischen Wandler, der elektrische Energie in mechanische Energie umwandelt. In Elektromotoren wird die Kraft, - die von einem Magnetfeld auf die
Übung: Aktorik und Antriebstechnik
 Identifizierungs- und Automatisierungstechnik Übung: Aktorik und Antriebstechnik Prof. Dr. Michael ten Hompel Sascha Feldhorst Lehrstuhl für Förder- und Lagerwesen TU Dortmund Aktorik und Antriebstechnik
Identifizierungs- und Automatisierungstechnik Übung: Aktorik und Antriebstechnik Prof. Dr. Michael ten Hompel Sascha Feldhorst Lehrstuhl für Förder- und Lagerwesen TU Dortmund Aktorik und Antriebstechnik
Die Gleichstrommaschine. Theorie
 Die Gleichstrommaschine Theorie 2 Inhaltsverzeichnis Inhaltsverzeichnis 1 Grundprinzip... 3 1.1 Kanalisierung des Magnetfeldes durch Polschuhe... 4 1.2 Kommutator... 5 1.3 Rotor mit vielen Leiterschleifen...
Die Gleichstrommaschine Theorie 2 Inhaltsverzeichnis Inhaltsverzeichnis 1 Grundprinzip... 3 1.1 Kanalisierung des Magnetfeldes durch Polschuhe... 4 1.2 Kommutator... 5 1.3 Rotor mit vielen Leiterschleifen...
Übung Grundlagen der Elektrotechnik B
 Übung Grundlagen der Elektrotechnik B Aufgabe 1: Rotierende Leiterschleife Betrachtet wird die im folgenden Bild dargestellte, in einem homogenen Magnetfeld rotierende Leiterschleife. Es seien folgende
Übung Grundlagen der Elektrotechnik B Aufgabe 1: Rotierende Leiterschleife Betrachtet wird die im folgenden Bild dargestellte, in einem homogenen Magnetfeld rotierende Leiterschleife. Es seien folgende
Elektrische Kleinmotoren
 Elektrische Kleinmotoren 1/5 Elektrische Kleinmotoren Spaltpolmotor Spaltpolmotoren gehören zu der Gruppe der Asynchronmotoren, da sie einen Kurzschlussläufer (Käfigläufer) haben, in dem ein durch den
Elektrische Kleinmotoren 1/5 Elektrische Kleinmotoren Spaltpolmotor Spaltpolmotoren gehören zu der Gruppe der Asynchronmotoren, da sie einen Kurzschlussläufer (Käfigläufer) haben, in dem ein durch den
Inhaltsübersicht. X 9
 Inhaltsübersicht Grundlagen des elektromotorischen Antriebes Nennleistung elektrischer Maschinen 1 Motoren 1 Generatoren : 1 Motordrehmoment 2 Nennmoment 2 Anzugsmoment 2 Kippmoment 2 Sattelmoment 2 Drehrichtung
Inhaltsübersicht Grundlagen des elektromotorischen Antriebes Nennleistung elektrischer Maschinen 1 Motoren 1 Generatoren : 1 Motordrehmoment 2 Nennmoment 2 Anzugsmoment 2 Kippmoment 2 Sattelmoment 2 Drehrichtung
6.1 GSM: Aufbau Seite 1
 6.1 GSM: Aufbau Seite 1 Geschichte 1832: Erster Generator von H. Pixii (Franzose) mit rotierenden Hufeisenmagneten 1860: Entwicklung der Ringwicklung und dem vielteiligen Stromwender durch A. Pacinotti
6.1 GSM: Aufbau Seite 1 Geschichte 1832: Erster Generator von H. Pixii (Franzose) mit rotierenden Hufeisenmagneten 1860: Entwicklung der Ringwicklung und dem vielteiligen Stromwender durch A. Pacinotti
maxon EC motor Bürstenlose DC Motoren: Eine Einführung
 maxon EC motor Bürstenlose DC Motoren: Eine Einführung Varianten: maxon EC Motorfamilien Gemeinsamkeiten Funktionsprinzip Wicklungsbeschaltung, Eisenverluste Elektronische Kommutierungssysteme Blockkommutierung
maxon EC motor Bürstenlose DC Motoren: Eine Einführung Varianten: maxon EC Motorfamilien Gemeinsamkeiten Funktionsprinzip Wicklungsbeschaltung, Eisenverluste Elektronische Kommutierungssysteme Blockkommutierung
Unkonventionelle Aktoren
 Unkonventionelle Aktoren Eine Einführung von Prof Dr.-Ing. habil. Hartmut Janocha 2., ergänzte und aktualisierte Auflage Oldenbourg Verlag München Inhalt Vorworte V 1 Einführung 1 1.1 Was sind unkonventionelle
Unkonventionelle Aktoren Eine Einführung von Prof Dr.-Ing. habil. Hartmut Janocha 2., ergänzte und aktualisierte Auflage Oldenbourg Verlag München Inhalt Vorworte V 1 Einführung 1 1.1 Was sind unkonventionelle
KRG NW, Physik Klasse 10, Elektromagnetismus, Fachlehrer Stahl Seite 15
 Seite 15 Zieht man den Stabmagneten aus dem Ring, kehren sich die oben beschriebenen Verhältnisse um. Der Ring baut mittels Induktionsspannung und daraus resultierendem Strom ein Magnetfeld auf, das dem
Seite 15 Zieht man den Stabmagneten aus dem Ring, kehren sich die oben beschriebenen Verhältnisse um. Der Ring baut mittels Induktionsspannung und daraus resultierendem Strom ein Magnetfeld auf, das dem
Aktoren und Sensoren im KFZ
 Bild 2.2_1 Aktoren und Sensoren im KFZ Bild 2.2_2 Quelle: VDI Richtlinie 2206 Grundstruktur mechatronischer Systeme Bild 2.2_3 Quelle: Prof. Bertram, Universität Dortmund Wirkungskette mit Aktor Bild 2.2_4
Bild 2.2_1 Aktoren und Sensoren im KFZ Bild 2.2_2 Quelle: VDI Richtlinie 2206 Grundstruktur mechatronischer Systeme Bild 2.2_3 Quelle: Prof. Bertram, Universität Dortmund Wirkungskette mit Aktor Bild 2.2_4
Elektrische Antriebe Grundlagen und Anwendungen. Übung 1. Elektromagnetismus, Aufbau und Funktionsprinzip der Gleichstrommaschine
 Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik Fakultät für Elektrotechnik und Informationstechnik Technische Universität München Elektrische Antriebe Grundlagen und Anwendungen Übung
Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik Fakultät für Elektrotechnik und Informationstechnik Technische Universität München Elektrische Antriebe Grundlagen und Anwendungen Übung
Grundlagen elektrischer Maschinen
 Cermar Müller, Bernd Ponick Grundlagen elektrischer Maschinen Neunte, völlig neu bearbeitete Auflage WILEY- VCH WILEY-VCH Verlag GmbH & Co. KGaA XIII Inhaltsverzeichnis Vorwort zur 9. Auflage Vorwort zur
Cermar Müller, Bernd Ponick Grundlagen elektrischer Maschinen Neunte, völlig neu bearbeitete Auflage WILEY- VCH WILEY-VCH Verlag GmbH & Co. KGaA XIII Inhaltsverzeichnis Vorwort zur 9. Auflage Vorwort zur
diesbezüglich gerne eine an Für Ihre Unterstützung möchte ich mich bereits im Voraus bei Ihnen bedanken.
 6 Vorwort diesbezüglich gerne eine E-Mail an rainer.hagl@fh-rosenheim.desenden. Für Ihre Unterstützung möchte ich mich bereits im Voraus bei Ihnen bedanken. Formelsymbole Im gesamten Manuskript wurde versucht,
6 Vorwort diesbezüglich gerne eine E-Mail an rainer.hagl@fh-rosenheim.desenden. Für Ihre Unterstützung möchte ich mich bereits im Voraus bei Ihnen bedanken. Formelsymbole Im gesamten Manuskript wurde versucht,
Inhaltsverzeichnis XIII. Vorwort zur 10. Auflage XVII. Vorwort zur 1. Auflage (1970)
") V Inhaltsverzeichnis Vorwort zur 10. Auflage XIII Vorwort zur 1. Auflage (1970) XVII 0 Einleitung 1 0.1 Schreibweise der Formelzeichen 1 0.2 Formelzeichen 2 0.3 Vorzeichenvereinbarungen 7 0.4 Formulierung
V Inhaltsverzeichnis Vorwort zur 10. Auflage XIII Vorwort zur 1. Auflage (1970) XVII 0 Einleitung 1 0.1 Schreibweise der Formelzeichen 1 0.2 Formelzeichen 2 0.3 Vorzeichenvereinbarungen 7 0.4 Formulierung
Grundlagen elektrischer Maschinen
 Germar Müller, Bernd Ponick Grundlagen elektrischer Maschinen Neunte, völlig neu bearbeitete Auflage WILEY- VCH WILEY-VCH Verlag GmbH & Co. KGaA Inhaltsverzeichnis Vorwort zur 9. Auflage Vorwort zur 1.
Germar Müller, Bernd Ponick Grundlagen elektrischer Maschinen Neunte, völlig neu bearbeitete Auflage WILEY- VCH WILEY-VCH Verlag GmbH & Co. KGaA Inhaltsverzeichnis Vorwort zur 9. Auflage Vorwort zur 1.
Elektromechanik. Von Professor Dr.-Ing. JOrgen Meins Technische Universitiit Braunschweig. Mit 176 Bildern
 Elektromechanik Von Professor Dr.-Ing. JOrgen Meins Technische Universitiit Braunschweig Mit 176 Bildern B. G. Teubner Stuttgart 1997 Die Deutsche Bibliothek - CIP-Einheitsaufnahme Meins, Jiirgen: Elektromechanik
Elektromechanik Von Professor Dr.-Ing. JOrgen Meins Technische Universitiit Braunschweig Mit 176 Bildern B. G. Teubner Stuttgart 1997 Die Deutsche Bibliothek - CIP-Einheitsaufnahme Meins, Jiirgen: Elektromechanik
Fachpraktikum Hochdynamische Antriebssysteme. Theoretische Grundlagen Gleichstrommaschine
 Fachpraktikum Hochdynamische ntriebssysteme Gleichstrommaschine Christof Zwyssig Franz Zürcher Philipp Karutz HS 2008 Gleichstrommaschine Die hier aufgeführten theoretischen Betrachtungen dienen dem Grundverständnis
Fachpraktikum Hochdynamische ntriebssysteme Gleichstrommaschine Christof Zwyssig Franz Zürcher Philipp Karutz HS 2008 Gleichstrommaschine Die hier aufgeführten theoretischen Betrachtungen dienen dem Grundverständnis
Motorsteuerung. Embedded Software Praktikum 4. Tim Hölzemann Embedded Engineering
 Motorsteuerung Embedded Software Praktikum 4 Tim Hölzemann Embedded Engineering Hüfferstraße 27 fon +49 (0)251.83 64-050 th403054@fh-muenster.de D-48149 Münster fax +49 (0)251.83 64-060 www.fh-muenster.de
Motorsteuerung Embedded Software Praktikum 4 Tim Hölzemann Embedded Engineering Hüfferstraße 27 fon +49 (0)251.83 64-050 th403054@fh-muenster.de D-48149 Münster fax +49 (0)251.83 64-060 www.fh-muenster.de
Inhaltsverzeichnis Grundlagen der Elektrotechnik
 Inhaltsverzeichnis 1 Grundlagen der Elektrotechnik................. 1 1.1 Gleichstromkreis........................ 1 1.1.1 Elektrischer Gleichstromkreis................ 2 1.1.2 Elektrische Spannung...................
Inhaltsverzeichnis 1 Grundlagen der Elektrotechnik................. 1 1.1 Gleichstromkreis........................ 1 1.1.1 Elektrischer Gleichstromkreis................ 2 1.1.2 Elektrische Spannung...................
Elektrische und Aktoren
 Elektrische und Aktoren Eine Einfuhrung von Prof. Wolfgang Gerke Oldenbourg Verlag 1 Einleitung 1 2 Einteilung und Aufbau von Aktoren 5 2.1 Einteilung der Aktoren 5 2.2 Aufbau von Aktoren 8 3 Arbeit, Energie,
Elektrische und Aktoren Eine Einfuhrung von Prof. Wolfgang Gerke Oldenbourg Verlag 1 Einleitung 1 2 Einteilung und Aufbau von Aktoren 5 2.1 Einteilung der Aktoren 5 2.2 Aufbau von Aktoren 8 3 Arbeit, Energie,
DER GLEICHSTROMMAGNET
 DER GLEICHSTROMMAGNET VON DR.-ING. EBERHARD KALLENBACH STÜTZERBACH/THÜRINGEN MIT 169 BILDERN UND 17 TABELLEN $ LEIPZIG1969 AKADEMISCHE VERLAGSGESELLSCHAFT GEEST&PORTIG K.-G. Inhalt 1. Das magnetische Feld
DER GLEICHSTROMMAGNET VON DR.-ING. EBERHARD KALLENBACH STÜTZERBACH/THÜRINGEN MIT 169 BILDERN UND 17 TABELLEN $ LEIPZIG1969 AKADEMISCHE VERLAGSGESELLSCHAFT GEEST&PORTIG K.-G. Inhalt 1. Das magnetische Feld
Gleichstrommotor. Betreuer: Simon Schneider Jan Maximilian Rybski
 Gleichstrommotor Betreuer: Simon Schneider Inhaltsverzeichnis - Aufbau der Gleichstrommotor - Prinzip, Aufbau und Funktion - Drehzahlsteuereingriffe - Betriebskennlinien - Steuerung -Aufbau der Schrittmotor
Gleichstrommotor Betreuer: Simon Schneider Inhaltsverzeichnis - Aufbau der Gleichstrommotor - Prinzip, Aufbau und Funktion - Drehzahlsteuereingriffe - Betriebskennlinien - Steuerung -Aufbau der Schrittmotor
Inhaltsverzeichnis. 6 Der einfache Stromkreis Das Spannungsverhaltnis Die Meßbereichserweiterung beim Spannungsmesser...
 Inhaltsverzeichnis 1 Einführung... 15 2 Der elektrische Strom in festen Körpern... 15 2.1 Die Elektrizitätsmenge... 15 2.2 Die Stromstärke... 17 2.3 Die Stromrichtung... 18 2.4 DerStromkreis... 18 2.5
Inhaltsverzeichnis 1 Einführung... 15 2 Der elektrische Strom in festen Körpern... 15 2.1 Die Elektrizitätsmenge... 15 2.2 Die Stromstärke... 17 2.3 Die Stromrichtung... 18 2.4 DerStromkreis... 18 2.5
Elektrizitätslehre und Magnetismus
 Elektrizitätslehre und Magnetismus Othmar Marti 23. 06. 2008 Institut für Experimentelle Physik Physik, Wirtschaftsphysik und Lehramt Physik Seite 2 Physik Klassische und Relativistische Mechanik 23. 06.
Elektrizitätslehre und Magnetismus Othmar Marti 23. 06. 2008 Institut für Experimentelle Physik Physik, Wirtschaftsphysik und Lehramt Physik Seite 2 Physik Klassische und Relativistische Mechanik 23. 06.
Kälteanlagentechnik. Elektro- und Steuerungstechnik. Bearbeitet von Dietmar Schittenhelm
 Kälteanlagentechnik Elektro- und Steuerungstechnik Bearbeitet von Dietmar Schittenhelm 6., überarbeitete Auflage 2015. Buch. XIV, 320 S. Kartoniert ISBN 978 3 8007 3650 8 Format (B x L): 17 x 24 cm Gewicht:
Kälteanlagentechnik Elektro- und Steuerungstechnik Bearbeitet von Dietmar Schittenhelm 6., überarbeitete Auflage 2015. Buch. XIV, 320 S. Kartoniert ISBN 978 3 8007 3650 8 Format (B x L): 17 x 24 cm Gewicht:
Leseprobe. Taschenbuch der Antriebstechnik. Herausgegeben von Horst Haberhauer, Manfred Kaczmarek. ISBN (Buch):
:") Leseprobe Taschenbuch der Antriebstechnik Herausgegeben von Horst Haberhauer, Manfred Kaczmarek ISBN (Buch): 978-3-446-42770-9 ISBN (E-Book): 978-3-446-43426-4 Weitere Informationen oder Bestellungen unter
Leseprobe Taschenbuch der Antriebstechnik Herausgegeben von Horst Haberhauer, Manfred Kaczmarek ISBN (Buch): 978-3-446-42770-9 ISBN (E-Book): 978-3-446-43426-4 Weitere Informationen oder Bestellungen unter
Inhalt. Vorwort. Bibliografische Informationen digitalisiert durch
 Vorwort V 1 Einführung 1 1.1 Was sind unkonventionelle Aktoren? 1 1.2 Aktoren als Systemkomponente 2 1.3 Aktoren im Zentrum von Mechatronik, Mikrosystemtechnik und Adaptronik 5 1.4 Intelligente" und Self-sensing-Aktoren
Vorwort V 1 Einführung 1 1.1 Was sind unkonventionelle Aktoren? 1 1.2 Aktoren als Systemkomponente 2 1.3 Aktoren im Zentrum von Mechatronik, Mikrosystemtechnik und Adaptronik 5 1.4 Intelligente" und Self-sensing-Aktoren
%UHPVYHUIDKUHQXQG(LQVDW]P JOLFKNHLWHQHOHNWULVFKHU0DVFKLQHQ
![%UHPVYHUIDKUHQXQG(LQVDW]P JOLFKNHLWHQHOHNWULVFKHU0DVFKLQHQ](/thumbs/65/52584675.jpg "%UHPVYHUIDKUHQXQG(LQVDW]P JOLFKNHLWHQHOHNWULVFKHU0DVFKLQHQ") 5-1 %UHPVYHUIDKUHQXQG(LQVDW]P JOLFKNHLWHQHOHNWULVFKHU0DVFKLQHQ %UHPVYHUIDKUHQEHL*OHLFKVWURPPRWRUHQ Von einem elektrischen Antrieb wird oft verlangt, dass er den Bremsvorgang übernimmt. Die bremsende Gleichstrommaschine
5-1 %UHPVYHUIDKUHQXQG(LQVDW]P JOLFKNHLWHQHOHNWULVFKHU0DVFKLQHQ %UHPVYHUIDKUHQEHL*OHLFKVWURPPRWRUHQ Von einem elektrischen Antrieb wird oft verlangt, dass er den Bremsvorgang übernimmt. Die bremsende Gleichstrommaschine
Gleichstrommaschine fremderregt, Nebenschluss, Reihemschluss Drehstromasynchronmaschine Synchronmaschine Transformator
 Inhalt: - Verbrauch und Ressourcen - Energiewandlung: Exergie und Anergie - Grundlagen mechanisch elektrischer Energiewandlung 1. und 2. Maxwell-Gleichung - Elektrische Maschinen: Gleichstrommaschine fremderregt,
Inhalt: - Verbrauch und Ressourcen - Energiewandlung: Exergie und Anergie - Grundlagen mechanisch elektrischer Energiewandlung 1. und 2. Maxwell-Gleichung - Elektrische Maschinen: Gleichstrommaschine fremderregt,
Elektrische Maschinen
 1/5 Elektrische Maschinen 1 unktionsprinzipien 1.1 Kraftwirkung efindet sich ein stromdurchflossener, gerader Leiter der Leiterlänge l in einem homogenen Magnetfeld, so bewirkt die Lorentz-Kraft auf die
1/5 Elektrische Maschinen 1 unktionsprinzipien 1.1 Kraftwirkung efindet sich ein stromdurchflossener, gerader Leiter der Leiterlänge l in einem homogenen Magnetfeld, so bewirkt die Lorentz-Kraft auf die
Steffen Paul Reinhold Paul. Grundlagen der Elektrotechnik. und Elektronik 2. Elektromagnetische Felder. und ihre Anwendungen.
 Steffen Paul Reinhold Paul Grundlagen der Elektrotechnik und Elektronik 2 Elektromagnetische Felder und ihre Anwendungen ^ Springer Vieweg 1 Das elektrische Feld 1 1.1 Felder 3 1.1.1 Feldbegriffe 4 1.1.2
Steffen Paul Reinhold Paul Grundlagen der Elektrotechnik und Elektronik 2 Elektromagnetische Felder und ihre Anwendungen ^ Springer Vieweg 1 Das elektrische Feld 1 1.1 Felder 3 1.1.1 Feldbegriffe 4 1.1.2
Fachpraktikum Elektrische Maschinen Versuch 1: Gleichstrommaschine
 Fachpraktikum Elektrische Maschinen Versuch 1: Gleichstrommaschine Theorie Inhaltsverzeichnis Inhaltsverzeichnis... 2 1 Grundprinzip... 3 1.1 Kanalisierung des Magnetfeldes durch Polschuhe... 4 1.2 Kommutator...
Fachpraktikum Elektrische Maschinen Versuch 1: Gleichstrommaschine Theorie Inhaltsverzeichnis Inhaltsverzeichnis... 2 1 Grundprinzip... 3 1.1 Kanalisierung des Magnetfeldes durch Polschuhe... 4 1.2 Kommutator...
Elektrische Antriebe und Anlagen
 Elektrische Antriebe und Anlagen Kapitel 9: Der Schrittmotor 5.Jhrg KOHE KOHE 1 Schrittmotor Eigenschaften: speziell für Stellaufgaben konstruierte elektrische Maschine kleiner Leistung, die definierte
Elektrische Antriebe und Anlagen Kapitel 9: Der Schrittmotor 5.Jhrg KOHE KOHE 1 Schrittmotor Eigenschaften: speziell für Stellaufgaben konstruierte elektrische Maschine kleiner Leistung, die definierte
Der Permanentmagnet-Gleichstrommotor (Artikelnr.: P )
") Lehrer-/Dozentenblatt Der Permanentmagnet-Gleichstrommotor (Artikelnr.: P1376200) Curriculare Themenzuordnung Fachgebiet: Physik Bildungsstufe: Klasse 7-10 Lehrplanthema: Elektrizitätslehre Unterthema:
Lehrer-/Dozentenblatt Der Permanentmagnet-Gleichstrommotor (Artikelnr.: P1376200) Curriculare Themenzuordnung Fachgebiet: Physik Bildungsstufe: Klasse 7-10 Lehrplanthema: Elektrizitätslehre Unterthema:
Inhaltsverzeichnis. vii
 Inhaltsverzeichnis A Grundlagen der Elektrotechnik... 1 A.1 Physikalische Grundgesetze und Definitionen... 1 A.1.1 Ladung... 1 A.1.2 Spannung... 2 A.1.3 Strom... 3 A.1.4 Ohm sches Gesetz... 4 A.1.5 Widerstand...
Inhaltsverzeichnis A Grundlagen der Elektrotechnik... 1 A.1 Physikalische Grundgesetze und Definitionen... 1 A.1.1 Ladung... 1 A.1.2 Spannung... 2 A.1.3 Strom... 3 A.1.4 Ohm sches Gesetz... 4 A.1.5 Widerstand...
Elektrische Maschinen
 Die Meisterprüfung Elektrische Maschinen Dipl.-Ing. Gerd Fehmel Dipl.-Ing. Peter Behrends unter Mitwirkung von: Dipl.-Ing. Horst Flachmann Dipl.-Ing. Otto Mai 13., überarbeitete Auflage Vogel Buchverlag
Die Meisterprüfung Elektrische Maschinen Dipl.-Ing. Gerd Fehmel Dipl.-Ing. Peter Behrends unter Mitwirkung von: Dipl.-Ing. Horst Flachmann Dipl.-Ing. Otto Mai 13., überarbeitete Auflage Vogel Buchverlag
Steuerung eines Systems, Open Loop Control
 Bild 2.3_1 Störgröße Energie Speicher Aktor Energiesteller Energiewandler Energieumformer Prozess (Abtrieb) Steuergerät Sensor Open loop Stellsignal Einganssignal in das Steuergerät Ausgangsgröße Steuerung
Bild 2.3_1 Störgröße Energie Speicher Aktor Energiesteller Energiewandler Energieumformer Prozess (Abtrieb) Steuergerät Sensor Open loop Stellsignal Einganssignal in das Steuergerät Ausgangsgröße Steuerung
Fachpraktikum Elektrische Maschinen. Versuch 2: Synchronmaschine
 Fachpraktikum Elektrische Maschinen Versuch 2: Synchronmaschine Theorie & Fragen Basierend auf den Unterlagen von LD Didactic Entwickelt von Thomas Reichert am Institut von Prof. J. W. Kolar Februar 2013
Fachpraktikum Elektrische Maschinen Versuch 2: Synchronmaschine Theorie & Fragen Basierend auf den Unterlagen von LD Didactic Entwickelt von Thomas Reichert am Institut von Prof. J. W. Kolar Februar 2013
Inhaltsübersicht. Vorwort 13. Kapitel 1 Grundlagen der elektromagnetischen Energiewandlung 15. Kapitel 2 Transformatoren 85
 Inhaltsübersicht Vorwort 13 Kapitel 1 Grundlagen der elektromagnetischen Energiewandlung 15 Kapitel 2 Transformatoren 85 Kapitel 3 Stromwendermaschinen 145 Kapitel 4 Grundlagen der Drehfeldmaschinen 197
Inhaltsübersicht Vorwort 13 Kapitel 1 Grundlagen der elektromagnetischen Energiewandlung 15 Kapitel 2 Transformatoren 85 Kapitel 3 Stromwendermaschinen 145 Kapitel 4 Grundlagen der Drehfeldmaschinen 197
Inhaltsverzeichnis. Vorwort
 Inhaltsverzeichnis Vorwort 13 Kapitel 1 Grundlagen der elektromagnetischen Energiewandlung Lernziele. 1.1 Feldtheoretische Zusammenhänge. 1.1.1 Durchflutungsgesetz. 1.1.2 Flussgesetze. 1.1.3 Materialgesetze.
Inhaltsverzeichnis Vorwort 13 Kapitel 1 Grundlagen der elektromagnetischen Energiewandlung Lernziele. 1.1 Feldtheoretische Zusammenhänge. 1.1.1 Durchflutungsgesetz. 1.1.2 Flussgesetze. 1.1.3 Materialgesetze.
Eberhard Kallenbach, Rüdiger Eick, Peer Quendt, Tom Ströhla, Karsten Feindt, Matthias Kallenbach. Elektromagnete
 Eberhard Kallenbach, Rüdiger Eick, Peer Quendt, Tom Ströhla, Karsten Feindt, Matthias Kallenbach Elektromagnete Grundlagen, Berechnung, Entwurf und Anwendung 2., überarbeitete und ergänzte Auflage Mit
Eberhard Kallenbach, Rüdiger Eick, Peer Quendt, Tom Ströhla, Karsten Feindt, Matthias Kallenbach Elektromagnete Grundlagen, Berechnung, Entwurf und Anwendung 2., überarbeitete und ergänzte Auflage Mit
Elektrotechnik/ Elektronik für Maschinenbauer
 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Herbert Bernstein Elektrotechnik/ Elektronik für Maschinenbauer Grundlagen
2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Herbert Bernstein Elektrotechnik/ Elektronik für Maschinenbauer Grundlagen
Elektrische Antriebe Grundlagen und Anwendungen. Übung 2. Stationäres Betriebsverhalten der fremderregten Gleichstrommaschine
 Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik Fakultät für Elektrotechnik und Informationstechnik Technische Universität München Elektrische Antriebe Grundlagen und Anwendungen Übung
Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik Fakultät für Elektrotechnik und Informationstechnik Technische Universität München Elektrische Antriebe Grundlagen und Anwendungen Übung
Aufbau der Gleichstrommaschine (graue Bauteile weichmagnetisch) Idealisierter Feldverlauf im Luftspalt der Gleichstrommaschine und Abmessungen
 Idealisierter Feldverlauf im Luftspalt der Gleichstrommaschine und Abmessungen") Zu 3.2.1 Erregerkreis Zu 3.1 Aufbau und grundsätzliche Wirkungsweise Bild 3.1: Aufbau der Gleichstrommaschine (graue Bauteile weichmagnetisch) Bild 3.3: Idealisierter Feldverlauf im Luftspalt der Gleichstrommaschine
Zu 3.2.1 Erregerkreis Zu 3.1 Aufbau und grundsätzliche Wirkungsweise Bild 3.1: Aufbau der Gleichstrommaschine (graue Bauteile weichmagnetisch) Bild 3.3: Idealisierter Feldverlauf im Luftspalt der Gleichstrommaschine
Elektrische Maschinen und Antriebe
 Elektrische Maschinen und Antriebe Übungsbuch: Aufgaben mit Lösungsweg Bearbeitet von Andreas Binder 1. Auflage 2012. Taschenbuch. xviii, 308 S. Paperback ISBN 978 3 642 17421 6 Format (B x L): 15,5 x
Elektrische Maschinen und Antriebe Übungsbuch: Aufgaben mit Lösungsweg Bearbeitet von Andreas Binder 1. Auflage 2012. Taschenbuch. xviii, 308 S. Paperback ISBN 978 3 642 17421 6 Format (B x L): 15,5 x
Inhalt. 1 Einleitender Überblick...13
 Inhalt 1 Einleitender Überblick...13 2 Grundbegriffe der Elektrotechnik...17 2.1 Elektrische Ladung...17 2.2 Elektrisches Potential und Spannung...18 2.3 Elektrischer Strom...20 2.4 Spannungsfall...20
Inhalt 1 Einleitender Überblick...13 2 Grundbegriffe der Elektrotechnik...17 2.1 Elektrische Ladung...17 2.2 Elektrisches Potential und Spannung...18 2.3 Elektrischer Strom...20 2.4 Spannungsfall...20
Digitale Steuerung. Hardwarepraktikum für Informatiker Matr. Nr.:... Versuch Nr.5. Vorkenntnisse: Universität Koblenz Landau Name:...
 Universität Koblenz Landau Name:..... Institut für Physik Vorname:..... Hardwarepraktikum für Informatiker Matr. Nr.:..... Digitale Steuerung Versuch Nr.5 Vorkenntnisse: Aufbau eines Gleichstrommotors,
Universität Koblenz Landau Name:..... Institut für Physik Vorname:..... Hardwarepraktikum für Informatiker Matr. Nr.:..... Digitale Steuerung Versuch Nr.5 Vorkenntnisse: Aufbau eines Gleichstrommotors,
Elektromagnete. Kallenbach Eick Quendt Ströhla I Feindt I Kallenbach
 Kallenbach Eick Quendt Ströhla I Feindt I Kallenbach Grundlagen, Berechnung, Entwurf und Anwendung 3., bearbeitete und ergänzte Auflage Mit 277 Abbildungen und 34 Tabellen STUDIUM VIEWEG+ TEUBNER Inhaltsverzeichnis
Kallenbach Eick Quendt Ströhla I Feindt I Kallenbach Grundlagen, Berechnung, Entwurf und Anwendung 3., bearbeitete und ergänzte Auflage Mit 277 Abbildungen und 34 Tabellen STUDIUM VIEWEG+ TEUBNER Inhaltsverzeichnis
Motoren und Generatoren mit Dauermagneten
 Motoren und Generatoren mit Dauermagneten 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Dipl.-Ing. Karl Ruschmeyer
Motoren und Generatoren mit Dauermagneten 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Dipl.-Ing. Karl Ruschmeyer
U Bahn. Vortrag zum Seminar Übungen zu Theoretischer Physik für das Lehramt L1 Gehalten von Heiko Krug
 U Bahn Vortrag zum Seminar Übungen zu Theoretischer Physik für das Lehramt L1 Gehalten von Heiko Krug Übersicht Mathematisch physikalische Betrachtungen zur Fahrt von U Bahnen Ausschließlich Bezug zu gradlinigen
U Bahn Vortrag zum Seminar Übungen zu Theoretischer Physik für das Lehramt L1 Gehalten von Heiko Krug Übersicht Mathematisch physikalische Betrachtungen zur Fahrt von U Bahnen Ausschließlich Bezug zu gradlinigen
Friedrich-Alexander Universität Erlangen-Nürnberg Klausur in Grundlagen der Elektrotechnik für Maschinenbauer 19. September 2005
 Lehrstuhl für Elektromagnetische Felder Prof Dr-Ing T Dürbaum Friedrich-Alexander niversität Erlangen-Nürnberg Klausur in Grundlagen der Elektrotechnik für Maschinenbauer 9 September 2005 Bearbeitungszeit:
Lehrstuhl für Elektromagnetische Felder Prof Dr-Ing T Dürbaum Friedrich-Alexander niversität Erlangen-Nürnberg Klausur in Grundlagen der Elektrotechnik für Maschinenbauer 9 September 2005 Bearbeitungszeit:
c - Maschinenkonstante φ - Erregerfluß
 Fachhochschule Jena Fachbereich Elektrotechnik Prof. Dr. Dittrich Elektrische Antriebe Versuch 1 - Grundlagen / ET, FT, MB: Gleichstrom Kommutatormaschine 1. Versuchsziel Kennenlernen der Belastungscharakteristik
Fachhochschule Jena Fachbereich Elektrotechnik Prof. Dr. Dittrich Elektrische Antriebe Versuch 1 - Grundlagen / ET, FT, MB: Gleichstrom Kommutatormaschine 1. Versuchsziel Kennenlernen der Belastungscharakteristik
Klaus Fuest. Elektrische Maschinen und Antriebe
 Klaus Fuest Elektrische Maschinen und Antriebe Klaus Fuest Elektrische Maschinen und Antriebe Lehr- und Arbeitsbuch Mit 151 Bildern, zahlreichen durchgerechneten Beispielen und Übungen sowie Fragen und
Klaus Fuest Elektrische Maschinen und Antriebe Klaus Fuest Elektrische Maschinen und Antriebe Lehr- und Arbeitsbuch Mit 151 Bildern, zahlreichen durchgerechneten Beispielen und Übungen sowie Fragen und
Elektromotoren für Gleichstrom.
 Elektromotoren für Gleichstrom. Von G. Roessler, Professor an der Königl. Technischen Hochschule zu Berlin. Mz't 49 z'n den Text gedruckten Fz'guren. Zweite verbesserte Auflage. Springer-Verlag Berlin
Elektromotoren für Gleichstrom. Von G. Roessler, Professor an der Königl. Technischen Hochschule zu Berlin. Mz't 49 z'n den Text gedruckten Fz'guren. Zweite verbesserte Auflage. Springer-Verlag Berlin
Projekt: Elektromotor
 Projekt: Elektromotor Wir bauen einen Gleichstrommotor aus fünf Teilen das Elektrotechnik- und Informatik-Labor der Fakultät IV http://www.dein-labor.tu-berlin.de Projekt: Elektromotor Liebe Schülerinnen
Projekt: Elektromotor Wir bauen einen Gleichstrommotor aus fünf Teilen das Elektrotechnik- und Informatik-Labor der Fakultät IV http://www.dein-labor.tu-berlin.de Projekt: Elektromotor Liebe Schülerinnen
Übungsblatt 07. PHYS3100 Grundkurs IIIb (Physik, Wirtschaftsphysik, Physik Lehramt) Othmar Marti,
 Othmar Marti,") Übungsblatt 07 PHYS3100 Grundkurs IIIb (Physik, Wirtschaftsphysik, Physik Lehramt) Othmar Marti, (othmar.marti@physik.uni-ulm.de) 7.. 005 oder 14.. 005 1 Aufgaben 1. Wir berechnen Elektromotoren. Nehmen
Übungsblatt 07 PHYS3100 Grundkurs IIIb (Physik, Wirtschaftsphysik, Physik Lehramt) Othmar Marti, (othmar.marti@physik.uni-ulm.de) 7.. 005 oder 14.. 005 1 Aufgaben 1. Wir berechnen Elektromotoren. Nehmen
Versuchsprotokoll zum Versuch Nr. 2 Messungen am Generator
 Ein Generator ist das Gegenstück zum Motor. Mit ihm ist es möglich mech. Energie in elektrische umzuwandeln. Beim Generator dreht sich in einem Magnetfeld eine Leiterschleife (Spule), wodurch ein Strom
Ein Generator ist das Gegenstück zum Motor. Mit ihm ist es möglich mech. Energie in elektrische umzuwandeln. Beim Generator dreht sich in einem Magnetfeld eine Leiterschleife (Spule), wodurch ein Strom
Elektromagnete. Grundlagen Berechnung Konstruktion Anwendung
 Elektromagnete Grundlagen Berechnung Konstruktion Anwendung Von Dr.-Ing. habil. Eberhard Kallenbach, Professor an der Technischen Universität Ilmenau, Dr.-Ing. Rüdiger Eick, Lucas Automotive GmbH Koblenz
Elektromagnete Grundlagen Berechnung Konstruktion Anwendung Von Dr.-Ing. habil. Eberhard Kallenbach, Professor an der Technischen Universität Ilmenau, Dr.-Ing. Rüdiger Eick, Lucas Automotive GmbH Koblenz
1 Grundlagen der Schrittantriebe 1 Erich Rummich
 Inhaltsverzeichnis Herausgeber-Vorwort Autoren-Vorwort 1 Grundlagen der Schrittantriebe 1 1.1 Einführung 1 1.2 Grundtypen von Schrittmotoren 4 1.2.1 Reluktanzschrittmotoren 4 1.2.2 Permanentmagnetisch
Inhaltsverzeichnis Herausgeber-Vorwort Autoren-Vorwort 1 Grundlagen der Schrittantriebe 1 1.1 Einführung 1 1.2 Grundtypen von Schrittmotoren 4 1.2.1 Reluktanzschrittmotoren 4 1.2.2 Permanentmagnetisch
expertttyl verlag Elektrische Schrittmotoren und -antriebe Funktionsprinzip - Betriebseigenschaften - Meßtechnik Univ.-Prof. Dr.
 Elektrische Schrittmotoren und -antriebe Funktionsprinzip - Betriebseigenschaften - Meßtechnik Univ.-Prof. Dr. Erich Rummich Dipl.-Ing. (FH) Hermann Ebert Dr.-Ing. Ralf Gfrörer Dipl.-Ing. Friedrich Traeger
Elektrische Schrittmotoren und -antriebe Funktionsprinzip - Betriebseigenschaften - Meßtechnik Univ.-Prof. Dr. Erich Rummich Dipl.-Ing. (FH) Hermann Ebert Dr.-Ing. Ralf Gfrörer Dipl.-Ing. Friedrich Traeger
ARBEITSPROGRAMM. Automatiker. Erstellt: durch Th. Steiger Überarbeitung: durch Kontrolle/Freigabe: durch
 Version 2.0 1/6 Semester 3 280 AUF2.5.1 Grundlagen Normen Ergänzung+Vertiefung 2 Anwendungsbereich der EN60204 nennen Anwendungsbereich der EN60439 nennen AUF2.5.3 Grundsatz des Personen- und Sachenschutzes
Version 2.0 1/6 Semester 3 280 AUF2.5.1 Grundlagen Normen Ergänzung+Vertiefung 2 Anwendungsbereich der EN60204 nennen Anwendungsbereich der EN60439 nennen AUF2.5.3 Grundsatz des Personen- und Sachenschutzes
Kapitel 4 Schnittstelle zum Prozess. 4-1 Aktoren
 Kapitel 4 Schnittstelle zum Prozess 4-1 Aktoren Begriffe: Aktor: dienst zur Einstellung eines Energie- oder Materiestroms Steller: bildet aus dem Reglerausgangssignal das Stellsignal Stellglied: greift
Kapitel 4 Schnittstelle zum Prozess 4-1 Aktoren Begriffe: Aktor: dienst zur Einstellung eines Energie- oder Materiestroms Steller: bildet aus dem Reglerausgangssignal das Stellsignal Stellglied: greift
Elektrotechnik und Elektronik für Maschinenbauer
 VDI-Buch Elektrotechnik und Elektronik für Maschinenbauer Grundlagen Bearbeitet von Ekbert Hering, Rolf Martin, Jürgen Gutekunst, Joachim Kempkes 2. aktualisierte Auflage 2012. Buch. xiii, 571 S. Hardcover
VDI-Buch Elektrotechnik und Elektronik für Maschinenbauer Grundlagen Bearbeitet von Ekbert Hering, Rolf Martin, Jürgen Gutekunst, Joachim Kempkes 2. aktualisierte Auflage 2012. Buch. xiii, 571 S. Hardcover
1.Schulaufgabe aus der Physik Lösungshinweise
 1.Schulaufgabe aus der Physik Lösungshinweise Gruppe A Aufgabe 1 (Grundwissen) Größe Energie Stromstärke Widerstand Ladung Kraft Buchstabe E I R Q F Einheit Joule: J Ampere: A Ohm: Ω Coulomb: C Newton:
1.Schulaufgabe aus der Physik Lösungshinweise Gruppe A Aufgabe 1 (Grundwissen) Größe Energie Stromstärke Widerstand Ladung Kraft Buchstabe E I R Q F Einheit Joule: J Ampere: A Ohm: Ω Coulomb: C Newton:
Lehrstuhl: Elektrische Antriebe und Maschinen Prof. Dr.-Ing. Bernhard Piepenbreier Prof. Dr.-Ing. Ingo Hahn
 Lehrstuhl: Elektrische Antriebe und Maschinen Prof. Dr.-Ing. Bernhard Piepenbreier Prof. Dr.-Ing. Ingo Hahn Fächerkatalog Stand Pie 09.06.2009 Titel der Lehrveranstaltung SWS V SWS Ü WS SS Grundlagen der
Lehrstuhl: Elektrische Antriebe und Maschinen Prof. Dr.-Ing. Bernhard Piepenbreier Prof. Dr.-Ing. Ingo Hahn Fächerkatalog Stand Pie 09.06.2009 Titel der Lehrveranstaltung SWS V SWS Ü WS SS Grundlagen der
Fachhochschule Bielefeld Praktikum Versuch 1. Prof. Dr.-Ing. Hofer EM 1 GM FB Ingenieurwissenschaften Elektrische Maschinen. Gleichstrommaschine
 Trafo Fachhochschule Bielefeld Praktikum Versuch 1 Gleichstrommaschine Versuchsaufgabe: Die hier zu untersuchende fremderregte Gleichstrommaschine (GM) wird im Verbund mit einer Drehstromasynchronmaschine
Trafo Fachhochschule Bielefeld Praktikum Versuch 1 Gleichstrommaschine Versuchsaufgabe: Die hier zu untersuchende fremderregte Gleichstrommaschine (GM) wird im Verbund mit einer Drehstromasynchronmaschine
Servoantriebe mit Gleichstrommotor. 4.1 Aufbau und Anwendungsbereich. 4.2 Gleichstrommotoren für Servoantriebe
 4 Servoantriebe mit Gleichstrommotor 4.1 Aufbau und Anwendungsbereich Servoantriebe mit Gleichstrommotor waren bis in die 80-ger Jahre dominierenden Servoantriebe. Sie sind einfach regelbar und die erforderlichen
4 Servoantriebe mit Gleichstrommotor 4.1 Aufbau und Anwendungsbereich Servoantriebe mit Gleichstrommotor waren bis in die 80-ger Jahre dominierenden Servoantriebe. Sie sind einfach regelbar und die erforderlichen
Klaus Fuest Peter Döring. Elektrische Maschinen und Antriebe
 Klaus Fuest Peter Döring Elektrische Maschinen und Antriebe Klaus Fuest Peter Döring Elektrische Maschinen und Antriebe Lehr- und Arbeitsbuch Mit 258 Abbildungen, zahlreichen durchgerechneten Beispielen
Klaus Fuest Peter Döring Elektrische Maschinen und Antriebe Klaus Fuest Peter Döring Elektrische Maschinen und Antriebe Lehr- und Arbeitsbuch Mit 258 Abbildungen, zahlreichen durchgerechneten Beispielen
Maschinenelemente-Skript Block A
 TUD-MB ME I / Block A Die neue Maschinenelemente- Lehre Prof.Dr.-Ing.H.Birkhofer Prof. Dr.-Ing. R. Nordmann Maschinenelemente-Skript Block A Fertigungstechnik Automobiltechnik Feinwerktechnik Aktoren Energiespeicher
TUD-MB ME I / Block A Die neue Maschinenelemente- Lehre Prof.Dr.-Ing.H.Birkhofer Prof. Dr.-Ing. R. Nordmann Maschinenelemente-Skript Block A Fertigungstechnik Automobiltechnik Feinwerktechnik Aktoren Energiespeicher
Elektrische Maschinen
 Eckhard Spring Elektrische Maschinen Eine Einführung 2., durchgesehenfe'auflage Mit 229 Abbildungen fyj. Springer Die elektrischen Maschinen Eine Kurzgeschichte der elektrischen Energietechnik 1 1 Gleichstrommaschine
Eckhard Spring Elektrische Maschinen Eine Einführung 2., durchgesehenfe'auflage Mit 229 Abbildungen fyj. Springer Die elektrischen Maschinen Eine Kurzgeschichte der elektrischen Energietechnik 1 1 Gleichstrommaschine
Inhalt. Institut für Leistungselektronik und Elektrische Antriebe. Universität Stuttgart
 Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Abt. Elektrische Energiewandlung Prof. Dr.-Ing. N. Parspour Inhalt 5 Elektrische Maschinen... 25 5.2 Asynchronmaschinen...
Universität Stuttgart Institut für Leistungselektronik und Elektrische Antriebe Abt. Elektrische Energiewandlung Prof. Dr.-Ing. N. Parspour Inhalt 5 Elektrische Maschinen... 25 5.2 Asynchronmaschinen...
Advanced Motion Control Techniques. Dipl. Ing. Jan Braun maxon motor ag Switzerland
 Advanced Motion Control Techniques Dipl. Ing. Jan Braun maxon motor ag Switzerland Agenda Schematiascher Aufbau Positionsregelkreis Übersicht Motion Control Systeme PC based mit CANopen für DC und EC Motoren
Advanced Motion Control Techniques Dipl. Ing. Jan Braun maxon motor ag Switzerland Agenda Schematiascher Aufbau Positionsregelkreis Übersicht Motion Control Systeme PC based mit CANopen für DC und EC Motoren
Grundwissen Physik 9. Klasse II
 Grundwissen Physik 9. Klasse II 1. Wärmelehre Die innere Energie eines Körpers enthält die Summe der kinetischen Energien und der potentiellen Energien aller seiner Teilchen, sie ist eine Speichergröße.
Grundwissen Physik 9. Klasse II 1. Wärmelehre Die innere Energie eines Körpers enthält die Summe der kinetischen Energien und der potentiellen Energien aller seiner Teilchen, sie ist eine Speichergröße.
Gleichstrommaschinen. Auf dem Anker sind viele in Reihe geschalten Spulen, dadurch sinkt die Welligkeit der Gleichspannung.
 Matura Komplementärfragen Gleichstrommaschinen Allgemeines zu Spannungserzeugung im Magnetfeld: Die Ankerwicklung wird im Magnetfeld der feststehenden Aussenpole gedreht und dadurch wird eine Spannung
Matura Komplementärfragen Gleichstrommaschinen Allgemeines zu Spannungserzeugung im Magnetfeld: Die Ankerwicklung wird im Magnetfeld der feststehenden Aussenpole gedreht und dadurch wird eine Spannung
SCHREINER LERN-APP: «3.1.1 ELEKTRIZITÄT»
 Wo sind die Einsatzgebiete bürstenloser Gleichstrommotoren (BLDC)? Was bedeutet BLDC? Spannung Wie ist die Abkürzung für Formeln und die Einheit? Widerstand Wie ist die Abkürzung für Formeln und die Einheit?
Wo sind die Einsatzgebiete bürstenloser Gleichstrommotoren (BLDC)? Was bedeutet BLDC? Spannung Wie ist die Abkürzung für Formeln und die Einheit? Widerstand Wie ist die Abkürzung für Formeln und die Einheit?
Schulversuchspraktikum 2000 bei Mag. Monika TURNWALD. Günter EIBENSTEINER Matrikelnummer mit Christian J. ZÖPFL
 Der Gleichstrommotor und Wechselstrommotor Schulversuchspraktikum 2000 bei Mag. Monika TURNWALD Günter EIBENSTEINER Matrikelnummer 9856136 mit Christian J. ZÖPFL Inhaltsverzeichnis 1. In welchen Klassen
Der Gleichstrommotor und Wechselstrommotor Schulversuchspraktikum 2000 bei Mag. Monika TURNWALD Günter EIBENSTEINER Matrikelnummer 9856136 mit Christian J. ZÖPFL Inhaltsverzeichnis 1. In welchen Klassen
Elektrotechnik für Maschinenbauer. Grundlagen der Elektrotechnik für Maschinenbauer Konsultation 12: Elektrische Maschinen
 Grundlagen der Konsultation 12: Elektrische aschinen 1. Einleitung Bei den elektrischen aschinen unterscheidet man Transformatoren, Gleichstrommaschinen, Asynchronmaschinen und Synchronmaschinen. Daneben
Grundlagen der Konsultation 12: Elektrische aschinen 1. Einleitung Bei den elektrischen aschinen unterscheidet man Transformatoren, Gleichstrommaschinen, Asynchronmaschinen und Synchronmaschinen. Daneben
Mechatronische Systeme
 Rolf Isermann Mechatronische Systeme Grundlagen 2. vollständig neu bearbeitete Auflage Mit 327 Abbildungen und 103 Tabellen QA Springer '* 1 Integrierte mechanisch-elektronische Systeme r'. 1 1.1 Vom mechanischen
Rolf Isermann Mechatronische Systeme Grundlagen 2. vollständig neu bearbeitete Auflage Mit 327 Abbildungen und 103 Tabellen QA Springer '* 1 Integrierte mechanisch-elektronische Systeme r'. 1 1.1 Vom mechanischen
CARL HANSER VERLAG. Hans-Dieter Stölting, Eberhard Kallenbach. Handbuch Elektrische Kleinantriebe
 CARL HANSER VERLAG Hans-Dieter Stölting, Eberhard Kallenbach Handbuch Elektrische Kleinantriebe 3-446-21985-4 www.hanser.de Inhaltsverzeichnis 1 Einleitung... 13 1.1 Allgemeines... 13 1.2 Das elektromagnetische
CARL HANSER VERLAG Hans-Dieter Stölting, Eberhard Kallenbach Handbuch Elektrische Kleinantriebe 3-446-21985-4 www.hanser.de Inhaltsverzeichnis 1 Einleitung... 13 1.1 Allgemeines... 13 1.2 Das elektromagnetische
Elektrische Antriebe im Kfz
 Lehrveranstaltung Elektrische Antriebstechnik Grundlagen und Anwendungen Elektrische Antriebe im Kfz Prof. Dr. Ing. Ralph Kennel (ralph.kennel@tum.de) Technische Universität München Arcisstraße 21 80333
Lehrveranstaltung Elektrische Antriebstechnik Grundlagen und Anwendungen Elektrische Antriebe im Kfz Prof. Dr. Ing. Ralph Kennel (ralph.kennel@tum.de) Technische Universität München Arcisstraße 21 80333
Elektrische Antriebstechnik (ANTR) Berufsbezogener Lernbereich Schwerpunkt: Energie- und Anlagentechnik. Aufgaben und Ziele des Faches:
 Berufsbezogener Lernbereich Schwerpunkt: Energie- und Anlagentechnik. Aufgaben und Ziele des Faches:") Elektrische Antriebstechnik (ANTR) Berufsbezogener Lernbereich Schwerpunkt: Energie- und Anlagentechnik Aufgaben und Ziele des Faches: In diesem Fach sollen die Schülerinnen und Schüler die Antriebsstränge
Elektrische Antriebstechnik (ANTR) Berufsbezogener Lernbereich Schwerpunkt: Energie- und Anlagentechnik Aufgaben und Ziele des Faches: In diesem Fach sollen die Schülerinnen und Schüler die Antriebsstränge
Asychronmotor. ManlE- Komplementärfrage. dabei konstanst geblieben.: ges=3/2
 ManlE- Komplementärfrage Asychronmotor Erzeugung eines magnetischen Drehfeldes: Zwei Möglichkeiten: A: Drehung eines Elektro- oder Dauermagneten B: Durch zeitliche Überlagerung von Wechselfeldern mit räumlich
ManlE- Komplementärfrage Asychronmotor Erzeugung eines magnetischen Drehfeldes: Zwei Möglichkeiten: A: Drehung eines Elektro- oder Dauermagneten B: Durch zeitliche Überlagerung von Wechselfeldern mit räumlich
Entwicklung des Kommutatorankers
 6.2 GSM: Kommutatorwicklungen Seite 1 Entwicklung des Kommutatorankers Die Wicklung des Ankers der gedachten Gleichstrommaschine besteht aus nur einer Spule (Durchmesserspule). Die Ankerspule dreht sich
6.2 GSM: Kommutatorwicklungen Seite 1 Entwicklung des Kommutatorankers Die Wicklung des Ankers der gedachten Gleichstrommaschine besteht aus nur einer Spule (Durchmesserspule). Die Ankerspule dreht sich
Simulationsgestützte tzte Auslegung von Lineardirektantrieben mit MAXWELL, SIMPLORER und ANSYS. Matthias Ulmer, Universität Stuttgart
 Simulationsgestützte tzte Auslegung von Lineardirektantrieben mit MAXWELL, SIMPLORER und ANSYS Matthias Ulmer, Universität Stuttgart Gliederung 1. Motivation und Zielsetzung 2. Elektrodynamische Lineardirektantriebe
Simulationsgestützte tzte Auslegung von Lineardirektantrieben mit MAXWELL, SIMPLORER und ANSYS Matthias Ulmer, Universität Stuttgart Gliederung 1. Motivation und Zielsetzung 2. Elektrodynamische Lineardirektantriebe
maxon EC motor Bürstenlose DC Motoren: Eine Einführung
 maxon EC motor Bürstenlose DC Motoren: Eine Einführung Varianten: maxon EC Motorfamilien Gemeinsamkeiten Funktionsprinzip Wicklungsbeschaltung, Eisenverluste Elektronische Kommutierungssysteme Blockkommutierung
maxon EC motor Bürstenlose DC Motoren: Eine Einführung Varianten: maxon EC Motorfamilien Gemeinsamkeiten Funktionsprinzip Wicklungsbeschaltung, Eisenverluste Elektronische Kommutierungssysteme Blockkommutierung
Intrasys lineare Antriebs und Bremstechnik
 Intrasys lineare Antriebs und Bremstechnik 1 Lineare Antriebstechnik Warum lineare Antriebstechnik Lineare Antriebstechnik erfüllt höchste Anforderungen an Sicherheit, Zuverlässigkeit un Wartungsfreiheit.
Intrasys lineare Antriebs und Bremstechnik 1 Lineare Antriebstechnik Warum lineare Antriebstechnik Lineare Antriebstechnik erfüllt höchste Anforderungen an Sicherheit, Zuverlässigkeit un Wartungsfreiheit.
9 Drehstromasynchronmaschine
 Mehr Informationen zum Titel 9 Drehstromasynchronmaschine Die Drehstromasynchronmaschine wird hauptsächlich als Motor eingesetzt und spielt eine wichtige Rolle im Bereich der elektrischen Antriebstechnik.
Mehr Informationen zum Titel 9 Drehstromasynchronmaschine Die Drehstromasynchronmaschine wird hauptsächlich als Motor eingesetzt und spielt eine wichtige Rolle im Bereich der elektrischen Antriebstechnik.
1 Stromrichterschaltungen (Übersicht)
") 1 Stromrichterschaltungen (Übersicht) Bevor die verschiedenen Stromrichterschaltungen im einzelnen besprochen werden, wird in diesem Kapitel ein kurzer Überblick über die Einteilung und die verschiedenen
1 Stromrichterschaltungen (Übersicht) Bevor die verschiedenen Stromrichterschaltungen im einzelnen besprochen werden, wird in diesem Kapitel ein kurzer Überblick über die Einteilung und die verschiedenen
Einfluss von Spannungsoberschwingungen und Rastmomenten auf den Gleichlauf von Servoantrieben mit Permanentmagnet-Synchronmotoren
 Einfluss von Spannungsoberschwingungen und Rastmomenten auf den Gleichlauf von Servoantrieben mit Permanentmagnet-Synchronmotoren Influence of voltage harmonics and cogging torque on speed deviations of
Einfluss von Spannungsoberschwingungen und Rastmomenten auf den Gleichlauf von Servoantrieben mit Permanentmagnet-Synchronmotoren Influence of voltage harmonics and cogging torque on speed deviations of
Rainer Hagl. Elektrische Antriebstechnik
 Rainer Hagl Elektrische Antriebstechnik Inhalt 1 Einführung... 11 1.1 Einsatzgebiete... 12 1.2 Aufgaben und Betriebszustände elektrischer Maschinen... 14 1.3 Bewegungsarten und Bewegungsgleichungen...
Rainer Hagl Elektrische Antriebstechnik Inhalt 1 Einführung... 11 1.1 Einsatzgebiete... 12 1.2 Aufgaben und Betriebszustände elektrischer Maschinen... 14 1.3 Bewegungsarten und Bewegungsgleichungen...
Klaus Fuest Peter Doring
 Klaus Fuest Peter Doring Klaus Fuest Peter Doring Elektrische Maschinen und Antriebe Lehr- und Arbeitsbuch Mit 265 Abbildungen, zahlreichen durchgerechneten Beispielen und Ubungen sowie Fragen und Aufgaben
Klaus Fuest Peter Doring Klaus Fuest Peter Doring Elektrische Maschinen und Antriebe Lehr- und Arbeitsbuch Mit 265 Abbildungen, zahlreichen durchgerechneten Beispielen und Ubungen sowie Fragen und Aufgaben