Einführung Software. Gerald Steinbauer Institut für Softwaretechnologie. Gerald Steinbauer. Konstruktion Mobiler Roboter, PR, WS11
|
|
|
- Tristan Acker
- vor 8 Jahren
- Abrufe
Transkript
1 Konstruktion Mobiler Roboter Einführung Software Institut für Softwaretechnologie 1

2 Kontroll Paradigmen Agenda Robot Operating System (ROS) Selbstlokalisation und Navigation Kinect & Point Cloud Library (PCL) Festival und Sphinx 2
")
3 Kontrollparadigmen drei grundsätzliche Paradigmen bestehen aus drei Bausteinen SENSE: Roboter nimmt seine Umgebung durch Sensoren wahr ACT: Roboter beeinflusst die Umgebung mit seinen Aktoren PLAN: Roboter plant auf Grund seiner Wahrnehmung die nächsten Aktionen, die zum Ziel führen 3

4 Kontrollparadigmen reaktives Paradigma SENSE-ACT deliberatives Paradigma SENSE-PLAN-ACT SENSE ACT hybrides Paradigma Synthese der beiden ersten Paradigmen SENSE PLAN ACT PLAN SENSE ACT 4

5 Sensoren Weltmodell Wissensbasis Entscheidungen Wissen Auftrag Aktoren Aktionen 5

6 Robot Operating System (ROS) Framework für die Entwicklung von Roboter Software soll OS-like Funktionalität bieten ursprünglich entwickelt von Stanford AI Lab (SAIL) mittlereile führend weiter entwickelt von Willow Garage Open Source Plafform verwendet von alle führenden Robotik- Labs bietet viel Funktionalität auf allen Level 6

7 (Einige) Unterstützte Plattformen 7

8 Peer-To-Peer P Prinzipien von ROS viele eigenständige Prozesse und verschiedene Hosts Multi-Lingual Kommunikation basiert auf XML-RPC unterstützt C++, Phyton, Octave, LISP definierte Datentypen, Interface Definition Language (IDL) Tool-Based Linux Philosophie mit vielen kleinen Bausteinen Thin Funktionalität in viele Stand-Alone Libraries verpackt, auch 3rd Party eigenes Build-System unterstützt Open-Source 8

9 Simulation Manipulation Task Executive ROS Visualization Message Passing Client Libratries Navigation Word Processing Web Browser Memory Management OS GUI File System Scheduler Drivers 9

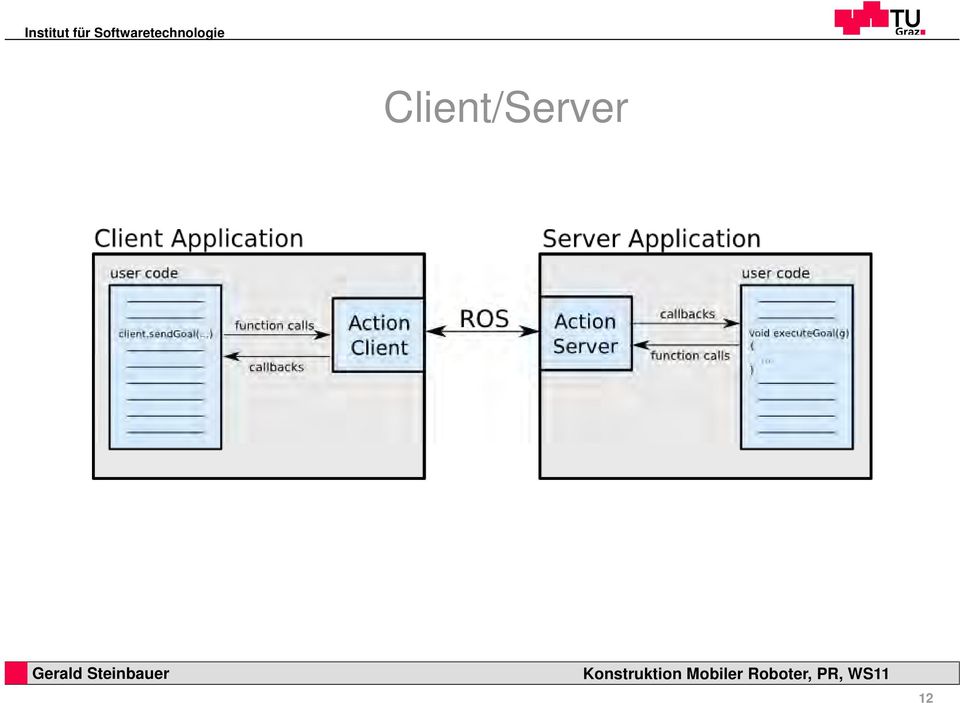
10 ROS - Operation ROS ist definitiv iti auf der operationellen Seite unterstützt Nachrichtentransport publisher/subscriber b ib (nodes, messages, topics) client/server (services, action-server) Runtime Ausführung Threads und verwandte Techniken Konfiguration unterstützt die Entwicklung wiederverwendbare Klassen und Bibliotheken Definition von Interfaces Debugging, Logging und Visualisierungs-Tools Build-System 10

11 Broadcast 11

12 Client/Server 12
13 ROS - Funktion ROS unterstützt tüt t den funktionelle Sicht Behavioral Control local l path planner obstacle avoidance trajectory generation Executive global path planner SMACH state machine for task-level control Planning Cognitive Robot Abstract Machine (CARM) von TUM Knowledge Processing for Autonomous Personal Robots (KnowRob) von TUM 13
 von TUM Knowledge Processing for Autonomous Personal Robots (KnowRob) von TUM")
14 Bausteine von ROS a node is an executable that uses ROS to communicate with other nodes and does computation messages are ROS data type used when subscribing or publishing to a topic nodes can publish messages to a topic as well subscribe to a topic to receive messages (many-to-many communication) a service is a node with one defined input and one defined output message type Co oncept: Comp putation Grap ph the master is a node that is the name service for ROS it helps nodes find each other nodes rosout is the decentralized ROS equivalent of stdout/stderr the parameter server provides and manages parameter across the network roscore is Master + rosout + parameter server Basic Infra astructure 14

15 Computation Graph robot laser imu map localization planner 15

16 Organisation in ROS a package is an organization unit in ROS the goal is to provide functionality it can contain a node, a library, data, configurations a manifests provide metadata about a package, including its license information and dependencies, as well as languagespecific information such as compiler flags. stacks are collections of packages that provide aggregate functionality, such as a "navigation stack" stack manifests provide data about a stack, including its license information and its dependencies on other stacks a bag is a file format in ROS for storing ROS message data 16

17 Naming in ROS hierarchische h Namenstruktur verwendet für alle Ressourcen nodes parameter topics services nodes haben einen Namespace /node_name/topic_name /t parameter sind auch hirarchisch strukturiert /p3at/odometry/frequency können wie das Linux Dateisystem verwendet werden (relativ, global) 17

18 Tools in ROS rxgraph display a visualization of a ROS computation graph client library supports the development of nodes allows easy access to topics, paramter, C++ & Phyton rviz is a 3d visualization tool it is online configurable and is able to display sensor data, point clouds, paths, coordinate systems ROS is able to record and playback all topics in an transparent way and in the proper timing 18

19 Features in ROS Koordinatentransformation t ti mit tf Verwalten verschiedener Referensysteme automatische Umrechnung vereinheitlichte Datentypen für ähnliche Sensoren oder Aktoren z.b. point clouds für Laser Scanner Daten z.b. velocity_command für Pioneer Remote Access von anderen Rechnern transparentes Netzwerk 19

20 Driver in ROS ROS verfügt über eine große Menge von Standard- d Nodes für Roboter und Sensoren Pioneer Roboter Familie Forbot Sick Laser Scanner Familie Hokuyo Laser Scanner GPS (NMEA) Xsense IMU Katana Arm Firewire Cameras Kinect 20
 Xsense IMU Katana Arm Firewire Cameras")
21 Mapping (gmapping) Funktionalität in ROS basiert auf der freien gmapping Implementierung einfaches Erstellen von 2d Karten Navigation kompletter navigation stack ermöglicht Autonomes Fahren Organisation von Verhalten Standard Templates für Verhalten (actionlib) Entscheidungsfindung Finite State Machine (SMACH ) 21
22 Installation auf Ubuntu ROS unterstützt tüt t voll Ubuntu eigenes Notebook hat Vorteile Ausprobieren abseits von Roboter und Lab Remote Access auf Roboter funktioniert am besten mit Ubuntu und ROS Electric Step-by-Step Anleitung im ROS Wiki Bootstrap System zusätzliche Packages könne einfach nach installiert (kompiliert) werden 22
23 Selbstlokalisation fundamentales Problem in der Robotik Bestimmung der Position des Roboters in Relation zu seiner Umgebung Pose = Position + Orientierung Indoor ein 3 dimensionales i Problem (x,y,θ) Outdoor ein 6 dimensionales Problem (x,y,z,φ,θ,ψ) Probleme Sensorungenauigkeiten Mehrdeutigkeiten mehrfache Hypothesen 23
24 Pose Tracking Lokalisierungsarten Verfolgung einer bekannten Position einfach zu lösen für bestimmte Aufgaben ausreichend Kalman-Filter Globale Lokalisierung löst das kidnapped robot Problem aufwendiger zu lösen generelle Lösung Partikelfilter 24
25 Geschlossene Darstellung der Unsicherheit 25
26 Prinzip Partikel Filter (1-dimensional) allgemeines Partikel: <x,y,θ,w> Sebastian Thrun 26
27 Localization in ROS ROS provides a ready-to use localization stack the Adaptive Monte Carlo Localization (amcl) package laser-based localization particle filter localization (MCL) KLD sampling to control the sample size augmented MCL to recover from localization errors Sensor model beam range finder model likelihood field model Motion model sample-based odometry model (differential drive) sample-based odometry model (omni-directional drive) for usage and parameter look to the tutorialt 27
28 amcl overview Map Server Laser Node initial i i pose/pose with covariance acml particles/pose array Robot Node odometry/odometry-tf 28
29 ROS Navigation Stack ROS provides a full navigation stack global planning A* and LPN local planning Dynamic Window Approach or Trajectory Rollout supports differential drive and omni-directional robots workswith and without global localization and map can work with 2d and/or 3d maps and sensors for usage and parameter look to the tutorial 29
30 ROS Navigation Stack Overview 30
31 Some Challenges the navigation stack is trimmed towards challenging indoor office-like environments narrow passages or doors difficult 3d structures like tables or wider bases rich variety of objects in the environment unexplored areas like blind corners 31
32 Cost Maps cost maps are used to generate a path or do achieve obstacle avoidance cost maps are 2d Global Cost Map initialized by the global map updated by sensor information map coordinate frame Local Cost Map rolling window centered around the robot cares about local obstacles updated by sensor information odometry coordinate frame 32
33 Point Cloud easy representation ti of the world represent the scene as a collection/set (cloud) of nd points usually n = 3 but each point might have additional info, e.g. RGB color, intensity, uncertainty (n>3) point cloud P with m points, P={p 1,pp 2,,pp m-1,pp m }, p i ={x i,y i,z i } large amount of data for detailed representations 33
34 Point Cloud - Examples [pointcloud.org] org] 34
35 Point Cloud Library (PCL) an open-source library to deal with point clouds allows to represent and manipulate point clouds easily provides a number of standard building blocks basic algorithms are there based on work of Radu Bogdan Rusu (TUM) stand alone library but developed and used by the ROS community as well a standard representation of 3D data in ROS 35
36 PCL Features template-based t to support several point types a number of standard types, e.g. {X,Y,Z} allows also more complex types, e.g. including normal vectors, RGB color, highly optimized memory alignment (i.e., simple point types) SSE support (i.e., simple point types) reuses high performance libraries Eigen (linear algebra), FLANN (nearest neighbor) prepared for easy parallelization on multi-cores (Intel TBB) provides a processing pipeline data acquisition computation visualization multi-os support (Windows, Mac, Linux, Android) 36
37 Useful Operations PCL supports building blocks in several smaller libraries filters standard filter mechanism, different types such as downsampling features I/O calculation of 3D features, surface normals, descriptors reading/writing PCL files segmentation cluster extraction, consensus methods for parametric models (cylinder,..) surfaces meshing, convex hull registration point cloud registration, e.g. ICP, own algorithms 37
38 OpenCV is a powerful open source Vision i library fully integrated in ROS bridge between ROS and OpenCV image format supports a lot of functionality feature extraction segmentation tracking transformation filtering build-in camera drivers and image capture; USB and IEEE
39 Speech Recognition - Sphinx based on the Pocket Sphinx package by CMU easy to use client publishes a string to a topic if a word is recognized needs a language and dictionary file samples form RoboCup@home available tools to create your own works quite fine with a good microphone and a quite calm background 39
40 Speech Synthesis - Festival the ROS sound-play package allows to play wav and ogg files standard sounds text to speech text to speech is based on Festival Speech Synthesis System by the University of Edinburgh supports different voices, creation of own voice possible reacts on the reception of a SoundRequest message 40
41 Dialogue Processing Pipeline Environment Speech Understanding Recognition hypothese interpreted intention Dialogue Manager intended response Production generated utterance Speech Recognition Text-to-Speech t Speech Signal (user utterance) Speech Signal (robot utterance) 41
42 Avatar Talking Head easier to interact t to a face or head face expressions and moods are possible some hints facegen creation of 3D faces and bodies, face-expression slider makehuman creation of animated bodies xface can import facegen files and replay them h-anim - C++-libary to control animations 42
43 Empfohlene Literatur Murphy: Introduction ti to AI Robotics Thrun, Fox, Burgard: Probabilistic Robotics ROS Wiki ( ROS Tutorials Robotics Wiki am IST ( PDFs zum download auf der Praktikums-Webseite 43
Einführung Software. Gerald Steinbauer Institut für Softwaretechnologie. Gerald Steinbauer. Konstruktion Mobiler Roboter, PR, WS10
 Konstruktion Mobiler Roboter Einführung Software Institut für Softwaretechnologie 1 Kontroll Paradigmen Selbstlokalisation vorhandene Software Agenda Robot Operating System (ROS) 2 Kontrollparadigmen drei
Konstruktion Mobiler Roboter Einführung Software Institut für Softwaretechnologie 1 Kontroll Paradigmen Selbstlokalisation vorhandene Software Agenda Robot Operating System (ROS) 2 Kontrollparadigmen drei
Einführung Software. Gerald Steinbauer Institut für Softwaretechnologie. Gerald Steinbauer. Konstruktion Mobiler Roboter, PR, WS12
 Konstruktion Mobiler Roboter Einführung Software Institut für Softwaretechnologie 1 Agenda Robot Operating System (ROS) Selbstlokalisation und Navigation Kinect & Point Cloud Library (PCL) Grasping & Arm
Konstruktion Mobiler Roboter Einführung Software Institut für Softwaretechnologie 1 Agenda Robot Operating System (ROS) Selbstlokalisation und Navigation Kinect & Point Cloud Library (PCL) Grasping & Arm
Konstruktion Mobiler Roboter Einführung Software
 Konstruktion Mobiler Roboter Einführung Software Institut für Softwaretechnologie 1 Agenda Robot Operating System (ROS) Selbstlokalisation und Navigation Kinect & Point Cloud Library (PCL) Arm Navigation
Konstruktion Mobiler Roboter Einführung Software Institut für Softwaretechnologie 1 Agenda Robot Operating System (ROS) Selbstlokalisation und Navigation Kinect & Point Cloud Library (PCL) Arm Navigation
716.091. Gerald Steinbauer Institut für Softwaretechnologie. Gerald Steinbauer. Konstruktion Mobiler Roboter, PR, WS11
 Konstruktion Mobiler Roboter 716.091 Institut für Softwaretechnologie 1 vergangene KMR Prokjekte 2 Grace Grace steht for Graz Robot Attending ConferencE inspiriert von AAAI Robot Challenge 2002 Aufgabe
Konstruktion Mobiler Roboter 716.091 Institut für Softwaretechnologie 1 vergangene KMR Prokjekte 2 Grace Grace steht for Graz Robot Attending ConferencE inspiriert von AAAI Robot Challenge 2002 Aufgabe
Informatik Einführung in das ROS Robot Operating System
 Informatik Einführung in das ROS Robot Operating System Robotik / AMR / Sensorik Jan Bühler Mannheim, 17.10.2011 Hochschule Mannheim University of Applied Sciences Inhalt 1.Aufgaben des ROS Robot Operating
Informatik Einführung in das ROS Robot Operating System Robotik / AMR / Sensorik Jan Bühler Mannheim, 17.10.2011 Hochschule Mannheim University of Applied Sciences Inhalt 1.Aufgaben des ROS Robot Operating
HIR Method & Tools for Fit Gap analysis
 HIR Method & Tools for Fit Gap analysis Based on a Powermax APML example 1 Base for all: The Processes HIR-Method for Template Checks, Fit Gap-Analysis, Change-, Quality- & Risk- Management etc. Main processes
HIR Method & Tools for Fit Gap analysis Based on a Powermax APML example 1 Base for all: The Processes HIR-Method for Template Checks, Fit Gap-Analysis, Change-, Quality- & Risk- Management etc. Main processes
Customer-specific software for autonomous driving and driver assistance (ADAS)
") This press release is approved for publication. Press Release Chemnitz, February 6 th, 2014 Customer-specific software for autonomous driving and driver assistance (ADAS) With the new product line Baselabs
This press release is approved for publication. Press Release Chemnitz, February 6 th, 2014 Customer-specific software for autonomous driving and driver assistance (ADAS) With the new product line Baselabs
GridMate The Grid Matlab Extension
 GridMate The Grid Matlab Extension Forschungszentrum Karlsruhe, Institute for Data Processing and Electronics T. Jejkal, R. Stotzka, M. Sutter, H. Gemmeke 1 What is the Motivation? Graphical development
GridMate The Grid Matlab Extension Forschungszentrum Karlsruhe, Institute for Data Processing and Electronics T. Jejkal, R. Stotzka, M. Sutter, H. Gemmeke 1 What is the Motivation? Graphical development
Algorithms for graph visualization
 Algorithms for graph visualization Project - Orthogonal Grid Layout with Small Area W INTER SEMESTER 2013/2014 Martin No llenburg KIT Universita t des Landes Baden-Wu rttemberg und nationales Forschungszentrum
Algorithms for graph visualization Project - Orthogonal Grid Layout with Small Area W INTER SEMESTER 2013/2014 Martin No llenburg KIT Universita t des Landes Baden-Wu rttemberg und nationales Forschungszentrum
SIMATIC PCS 7 V8.2 SIMIT V9. Clever kombiniert: Testen und Trainieren von Automatisierungsprojekten
 SIMATIC PCS 7 V8.2 SIMIT V9 Clever kombiniert: Testen und Trainieren von Automatisierungsprojekten Frei Verwendbar Siemens AG 2016 siemens.com/process-automation SIMATIC PCS 7 V8.2 Effizientes Top Down
SIMATIC PCS 7 V8.2 SIMIT V9 Clever kombiniert: Testen und Trainieren von Automatisierungsprojekten Frei Verwendbar Siemens AG 2016 siemens.com/process-automation SIMATIC PCS 7 V8.2 Effizientes Top Down
Fakultät für Informatik der Technischen Universität München. Cognitive Systems. Introduction to Practical Session
 Introduction to Practical Session Prof. Dr.-Ing. habil. Alois Knoll Reinhard Lafrenz, Florian Röhrbein, Sascha Griffiths Robotics and Embedded Systems (Informatik VI, Prof. Knoll) TUM Outline Demonstrator
Introduction to Practical Session Prof. Dr.-Ing. habil. Alois Knoll Reinhard Lafrenz, Florian Röhrbein, Sascha Griffiths Robotics and Embedded Systems (Informatik VI, Prof. Knoll) TUM Outline Demonstrator
Model-based Development of Hybrid-specific ECU Software for a Hybrid Vehicle with Compressed- Natural-Gas Engine
 Model-based Development of Hybrid-specific ECU Software for a Hybrid Vehicle with Compressed- Natural-Gas Engine 5. Braunschweiger Symposium 20./21. Februar 2008 Dipl.-Ing. T. Mauk Dr. phil. nat. D. Kraft
Model-based Development of Hybrid-specific ECU Software for a Hybrid Vehicle with Compressed- Natural-Gas Engine 5. Braunschweiger Symposium 20./21. Februar 2008 Dipl.-Ing. T. Mauk Dr. phil. nat. D. Kraft
Introducing PAThWay. Structured and methodical performance engineering. Isaías A. Comprés Ureña Ventsislav Petkov Michael Firbach Michael Gerndt
 Introducing PAThWay Structured and methodical performance engineering Isaías A. Comprés Ureña Ventsislav Petkov Michael Firbach Michael Gerndt Technical University of Munich Overview Tuning Challenges
Introducing PAThWay Structured and methodical performance engineering Isaías A. Comprés Ureña Ventsislav Petkov Michael Firbach Michael Gerndt Technical University of Munich Overview Tuning Challenges
SharePoint 2010 Mobile Access
 Erstellung 23.05.2013 SharePoint 2010 Mobile Access von TIMEWARP IT Consulting GmbH Stephan Nassberger Hofmühlgasse 17/1/5 A-1060 Wien Verantwortlich für das Dokument: - Stephan Nassberger (TIMEWARP) 1
Erstellung 23.05.2013 SharePoint 2010 Mobile Access von TIMEWARP IT Consulting GmbH Stephan Nassberger Hofmühlgasse 17/1/5 A-1060 Wien Verantwortlich für das Dokument: - Stephan Nassberger (TIMEWARP) 1
Browser- gestützte Visualisierung komplexer Datensätze: Das ROAD System
 AG Computeranwendungen und QuanLtaLve Methoden in der Archäologie 5. Workshop Tübingen 14. 15. Februar 2014 Browser- gestützte Visualisierung komplexer Datensätze: Das ROAD System Volker Hochschild, Michael
AG Computeranwendungen und QuanLtaLve Methoden in der Archäologie 5. Workshop Tübingen 14. 15. Februar 2014 Browser- gestützte Visualisierung komplexer Datensätze: Das ROAD System Volker Hochschild, Michael
Markus BöhmB Account Technology Architect Microsoft Schweiz GmbH
 Markus BöhmB Account Technology Architect Microsoft Schweiz GmbH What is a GEVER??? Office Strategy OXBA How we used SharePoint Geschäft Verwaltung Case Management Manage Dossiers Create and Manage Activities
Markus BöhmB Account Technology Architect Microsoft Schweiz GmbH What is a GEVER??? Office Strategy OXBA How we used SharePoint Geschäft Verwaltung Case Management Manage Dossiers Create and Manage Activities
Tuning des Weblogic /Oracle Fusion Middleware 11g. Jan-Peter Timmermann Principal Consultant PITSS
 Tuning des Weblogic /Oracle Fusion Middleware 11g Jan-Peter Timmermann Principal Consultant PITSS 1 Agenda Bei jeder Installation wiederkehrende Fragen WievielForms Server braucheich Agenda WievielRAM
Tuning des Weblogic /Oracle Fusion Middleware 11g Jan-Peter Timmermann Principal Consultant PITSS 1 Agenda Bei jeder Installation wiederkehrende Fragen WievielForms Server braucheich Agenda WievielRAM
miditech 4merge 4-fach MIDI Merger mit :
 miditech 4merge 4-fach MIDI Merger mit : 4 x MIDI Input Port, 4 LEDs für MIDI In Signale 1 x MIDI Output Port MIDI USB Port, auch für USB Power Adapter Power LED und LOGO LEDs Hochwertiges Aluminium Gehäuse
miditech 4merge 4-fach MIDI Merger mit : 4 x MIDI Input Port, 4 LEDs für MIDI In Signale 1 x MIDI Output Port MIDI USB Port, auch für USB Power Adapter Power LED und LOGO LEDs Hochwertiges Aluminium Gehäuse
F. Kathe ROS Folie 1
 F. Kathe ROS Folie 1 F. Kathe ROS Folie 2 ROS Eine Einführung in das Robot Operating System Florian Kathe fkathe@uni-koblenz.de Institut für Computervisualistik Universität Koblenz-Landau 9. November 2012
F. Kathe ROS Folie 1 F. Kathe ROS Folie 2 ROS Eine Einführung in das Robot Operating System Florian Kathe fkathe@uni-koblenz.de Institut für Computervisualistik Universität Koblenz-Landau 9. November 2012
arlanis Software AG SOA Architektonische und technische Grundlagen Andreas Holubek
 arlanis Software AG SOA Architektonische und technische Grundlagen Andreas Holubek Speaker Andreas Holubek VP Engineering andreas.holubek@arlanis.com arlanis Software AG, D-14467 Potsdam 2009, arlanis
arlanis Software AG SOA Architektonische und technische Grundlagen Andreas Holubek Speaker Andreas Holubek VP Engineering andreas.holubek@arlanis.com arlanis Software AG, D-14467 Potsdam 2009, arlanis
Einführung in die Robotik Einführung. Mohamed Oubbati Institut für Neuroinformatik. Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 23. 10.
 731 / 50 24153 mohamed.oubbati@uni-ulm.de 23. 10.") Einführung in die Robotik Einführung Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 23. 10. 2012 Was ist ein Roboter? Was ist ein Roboter? Jeder hat
Einführung in die Robotik Einführung Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 23. 10. 2012 Was ist ein Roboter? Was ist ein Roboter? Jeder hat
Einführung in die Robotik Steuerungsarchitekturen. Mohamed Oubbati Institut für Neuroinformatik. Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.
 731 / 50 24153 mohamed.oubbati@uni-ulm.") Einführung in die Robotik Steuerungsarchitekturen Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 29. 01. 2013 Steuerungsarchitekturen - Deliberative
Einführung in die Robotik Steuerungsarchitekturen Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 29. 01. 2013 Steuerungsarchitekturen - Deliberative
Apollo Überblick. Klaus Kurz. Manager Business Development. 2007 Adobe Systems Incorporated. All Rights Reserved.
 Apollo Überblick Klaus Kurz Manager Business Development 1 Was ist Apollo? Apollo ist der Codename für eine plattformunabhängige Laufzeitumgebung, entwickelt von Adobe, die es Entwicklern ermöglicht ihre
Apollo Überblick Klaus Kurz Manager Business Development 1 Was ist Apollo? Apollo ist der Codename für eine plattformunabhängige Laufzeitumgebung, entwickelt von Adobe, die es Entwicklern ermöglicht ihre
Praktikum Einführung
 Praktikum Einführung Praktikum im Rahmen der Veranstaltung Sicherheit in Netzen im WS 08/09 Praktikumsleiter: Holger Plett Agenda Motivation AVISPA Einleitung Aufbau des Frameworks Elemente des Frameworks
Praktikum Einführung Praktikum im Rahmen der Veranstaltung Sicherheit in Netzen im WS 08/09 Praktikumsleiter: Holger Plett Agenda Motivation AVISPA Einleitung Aufbau des Frameworks Elemente des Frameworks
Webbasierte Exploration von großen 3D-Stadtmodellen mit dem 3DCityDB Webclient
 Webbasierte Exploration von großen 3D-Stadtmodellen mit dem 3DCityDB Webclient Zhihang Yao, Kanishk Chaturvedi, Thomas H. Kolbe Lehrstuhl für Geoinformatik www.gis.bgu.tum.de 11/14/2015 Webbasierte Exploration
Webbasierte Exploration von großen 3D-Stadtmodellen mit dem 3DCityDB Webclient Zhihang Yao, Kanishk Chaturvedi, Thomas H. Kolbe Lehrstuhl für Geoinformatik www.gis.bgu.tum.de 11/14/2015 Webbasierte Exploration
p^db=`oj===pìééçêíáåñçêã~íáçå=
 p^db=`oj===pìééçêíáåñçêã~íáçå= Error: "Could not connect to the SQL Server Instance" or "Failed to open a connection to the database." When you attempt to launch ACT! by Sage or ACT by Sage Premium for
p^db=`oj===pìééçêíáåñçêã~íáçå= Error: "Could not connect to the SQL Server Instance" or "Failed to open a connection to the database." When you attempt to launch ACT! by Sage or ACT by Sage Premium for
Microsoft Azure Fundamentals MOC 10979
 Microsoft Azure Fundamentals MOC 10979 In dem Kurs Microsoft Azure Fundamentals (MOC 10979) erhalten Sie praktische Anleitungen und Praxiserfahrung in der Implementierung von Microsoft Azure. Ihnen werden
Microsoft Azure Fundamentals MOC 10979 In dem Kurs Microsoft Azure Fundamentals (MOC 10979) erhalten Sie praktische Anleitungen und Praxiserfahrung in der Implementierung von Microsoft Azure. Ihnen werden
Mash-Up Personal Learning Environments. Dr. Hendrik Drachsler
 Decision Support for Learners in Mash-Up Personal Learning Environments Dr. Hendrik Drachsler Personal Nowadays Environments Blog Reader More Information Providers Social Bookmarking Various Communities
Decision Support for Learners in Mash-Up Personal Learning Environments Dr. Hendrik Drachsler Personal Nowadays Environments Blog Reader More Information Providers Social Bookmarking Various Communities
Karlsruhe Institute of Technology Die Kooperation von Forschungszentrum Karlsruhe GmbH und Universität Karlsruhe (TH)
") Combining Cloud and Grid with a User Interface Jie Tao Karlsruhe Institute of Technology jie.tao@kit.edu Die Kooperation von Outline Motivation The g-eclipse Project Extending gg-eclipse for a Cloud Framework
Combining Cloud and Grid with a User Interface Jie Tao Karlsruhe Institute of Technology jie.tao@kit.edu Die Kooperation von Outline Motivation The g-eclipse Project Extending gg-eclipse for a Cloud Framework
Engineering the Factory of the Future Now.Next.Beyond. Heiko Schwindt VP Automation & Electrification Solutions, Bosch Rexroth
 Engineering the Factory of the Future Now.Next.Beyond. Heiko Schwindt VP Automation & Electrification Solutions, Bosch Rexroth Connect on LinkedIn www.linkedin.com/in/heiko-schwindt-625039140/ 1 "The challenge
Engineering the Factory of the Future Now.Next.Beyond. Heiko Schwindt VP Automation & Electrification Solutions, Bosch Rexroth Connect on LinkedIn www.linkedin.com/in/heiko-schwindt-625039140/ 1 "The challenge
WE SHAPE INDUSTRY 4.0 BOSCH CONNECTED INDUSTRY DR.-ING. STEFAN AßMANN
 WE SHAPE INDUSTRY 4.0 BOSCH CONNECTED INDUSTRY DR.-ING. STEFAN AßMANN Bosch-Definition for Industry 4.0 Our Seven Features Connected Manufacturing Connected Logistics Connected Autonomous and Collaborative
WE SHAPE INDUSTRY 4.0 BOSCH CONNECTED INDUSTRY DR.-ING. STEFAN AßMANN Bosch-Definition for Industry 4.0 Our Seven Features Connected Manufacturing Connected Logistics Connected Autonomous and Collaborative
Video Line Array Highest Resolution CCTV
 Schille Informationssysteme GmbH Video Line Array Highest Resolution CCTV SiDOC20120817-001 Disadvantages of high resolution cameras High costs Low frame rates Failure results in large surveillance gaps
Schille Informationssysteme GmbH Video Line Array Highest Resolution CCTV SiDOC20120817-001 Disadvantages of high resolution cameras High costs Low frame rates Failure results in large surveillance gaps
WP2. Communication and Dissemination. Wirtschafts- und Wissenschaftsförderung im Freistaat Thüringen
 WP2 Communication and Dissemination Europa Programm Center Im Freistaat Thüringen In Trägerschaft des TIAW e. V. 1 GOALS for WP2: Knowledge information about CHAMPIONS and its content Direct communication
WP2 Communication and Dissemination Europa Programm Center Im Freistaat Thüringen In Trägerschaft des TIAW e. V. 1 GOALS for WP2: Knowledge information about CHAMPIONS and its content Direct communication
Symbio system requirements. Version 5.1
 Symbio system requirements Version 5.1 From: January 2016 2016 Ploetz + Zeller GmbH Symbio system requirements 2 Content 1 Symbio Web... 3 1.1 Overview... 3 1.1.1 Single server installation... 3 1.1.2
Symbio system requirements Version 5.1 From: January 2016 2016 Ploetz + Zeller GmbH Symbio system requirements 2 Content 1 Symbio Web... 3 1.1 Overview... 3 1.1.1 Single server installation... 3 1.1.2
https://portal.microsoftonline.com
 Sie haben nun Office über Office365 bezogen. Ihr Account wird in Kürze in dem Office365 Portal angelegt. Anschließend können Sie, wie unten beschrieben, die Software beziehen. Congratulations, you have
Sie haben nun Office über Office365 bezogen. Ihr Account wird in Kürze in dem Office365 Portal angelegt. Anschließend können Sie, wie unten beschrieben, die Software beziehen. Congratulations, you have
Mensch-Maschine-Interaktion 2 Übung 1
 Mensch-Maschine-Interaktion 2 Übung 1 Ludwig-Maximilians-Universität München Wintersemester 2012/2013 Alexander De Luca, Aurélien Tabard Ludwig-Maximilians-Universität München Mensch-Maschine-Interaktion
Mensch-Maschine-Interaktion 2 Übung 1 Ludwig-Maximilians-Universität München Wintersemester 2012/2013 Alexander De Luca, Aurélien Tabard Ludwig-Maximilians-Universität München Mensch-Maschine-Interaktion
Contents. Interaction Flow / Process Flow. Structure Maps. Reference Zone. Wireframes / Mock-Up
 Contents 5d 5e 5f 5g Interaction Flow / Process Flow Structure Maps Reference Zone Wireframes / Mock-Up 5d Interaction Flow (Frontend, sichtbar) / Process Flow (Backend, nicht sichtbar) Flow Chart: A Flowchart
Contents 5d 5e 5f 5g Interaction Flow / Process Flow Structure Maps Reference Zone Wireframes / Mock-Up 5d Interaction Flow (Frontend, sichtbar) / Process Flow (Backend, nicht sichtbar) Flow Chart: A Flowchart
TomTom WEBFLEET Tachograph
 TomTom WEBFLEET Tachograph Installation TG, 17.06.2013 Terms & Conditions Customers can sign-up for WEBFLEET Tachograph Management using the additional services form. Remote download Price: NAT: 9,90.-/EU:
TomTom WEBFLEET Tachograph Installation TG, 17.06.2013 Terms & Conditions Customers can sign-up for WEBFLEET Tachograph Management using the additional services form. Remote download Price: NAT: 9,90.-/EU:
Aufbau eines IT-Servicekataloges am Fallbeispiel einer Schweizer Bank
 SwissICT 2011 am Fallbeispiel einer Schweizer Bank Fritz Kleiner, fritz.kleiner@futureways.ch future ways Agenda Begriffsklärung Funktionen und Aspekte eines IT-Servicekataloges Fallbeispiel eines IT-Servicekataloges
SwissICT 2011 am Fallbeispiel einer Schweizer Bank Fritz Kleiner, fritz.kleiner@futureways.ch future ways Agenda Begriffsklärung Funktionen und Aspekte eines IT-Servicekataloges Fallbeispiel eines IT-Servicekataloges
Bes 10 Für ios und Android
 Bes 10 Für ios und Android Architektur einer nicht Container (Sandbox) basierenden MDM Lösung Simple & Secure ios & Android Management mit 10.1.1 Secure Workspace - Sicherer Container für ios und Android
Bes 10 Für ios und Android Architektur einer nicht Container (Sandbox) basierenden MDM Lösung Simple & Secure ios & Android Management mit 10.1.1 Secure Workspace - Sicherer Container für ios und Android
TSM 5.2 Experiences Lothar Wollschläger Zentralinstitut für Angewandte Mathematik Forschungszentrum Jülich
 TSM 5.2 Experiences Lothar Wollschläger Zentralinstitut für Angewandte Mathematik Forschungszentrum Jülich L.Wollschlaeger@fz-juelich.de Contents TSM Test Configuration Supercomputer Data Management TSM-HSM
TSM 5.2 Experiences Lothar Wollschläger Zentralinstitut für Angewandte Mathematik Forschungszentrum Jülich L.Wollschlaeger@fz-juelich.de Contents TSM Test Configuration Supercomputer Data Management TSM-HSM
owncloud Sync Meine Daten gehören mir! Dr. Markus Tauber, AIT, ICB www.icb.at www.ait.ac.at/ict-security www.markus.tauber.co.at markus@tauber.co.
 owncloud Sync Meine Daten gehören mir! Dr. Markus Tauber, AIT, ICB www.icb.at www.ait.ac.at/ict-security www.markus.tauber.co.at markus@tauber.co.at Übersicht Warum alternative cloud Dienste wählen? Was
owncloud Sync Meine Daten gehören mir! Dr. Markus Tauber, AIT, ICB www.icb.at www.ait.ac.at/ict-security www.markus.tauber.co.at markus@tauber.co.at Übersicht Warum alternative cloud Dienste wählen? Was
Powershell DSC Oliver Ryf
 1 Powershell DSC Oliver Ryf Partner: 2 Agenda Begrüssung Vorstellung Referent PowerShell Desired State Configuration F&A Weiterführende Kurse 3 Vorstellung Referent Seit 1991 IT-Trainer 1995 MCSE und MCT
1 Powershell DSC Oliver Ryf Partner: 2 Agenda Begrüssung Vorstellung Referent PowerShell Desired State Configuration F&A Weiterführende Kurse 3 Vorstellung Referent Seit 1991 IT-Trainer 1995 MCSE und MCT
Konstruktion Mobiler Roboter 716.091
 Konstruktion Mobiler Roboter 716.091 Clemens Mühlbacher Institut für Softwaretechnologie 1 vergangene KMR Prokjekte http://www.youtube.com/v/wu7zyzja89i&feature=youtu.be WS 2011/2012 Conference Robot 2
Konstruktion Mobiler Roboter 716.091 Clemens Mühlbacher Institut für Softwaretechnologie 1 vergangene KMR Prokjekte http://www.youtube.com/v/wu7zyzja89i&feature=youtu.be WS 2011/2012 Conference Robot 2
Eclipse User Interface Guidelines
 SS 2009 Softwarequalität 06.05.2009 C. M. Bopda, S. Vaupel {kaymic/vaupel84}@mathematik.uni-marburg.de Motivation (Problem) Motivation (Problem) Eclipse is a universal tool platform - an open, extensible
SS 2009 Softwarequalität 06.05.2009 C. M. Bopda, S. Vaupel {kaymic/vaupel84}@mathematik.uni-marburg.de Motivation (Problem) Motivation (Problem) Eclipse is a universal tool platform - an open, extensible
DATA ANALYSIS AND REPRESENTATION FOR SOFTWARE SYSTEMS
 DATA ANALYSIS AND REPRESENTATION FOR SOFTWARE SYSTEMS Master Seminar Empirical Software Engineering Anuradha Ganapathi Rathnachalam Institut für Informatik Software & Systems Engineering Agenda Introduction
DATA ANALYSIS AND REPRESENTATION FOR SOFTWARE SYSTEMS Master Seminar Empirical Software Engineering Anuradha Ganapathi Rathnachalam Institut für Informatik Software & Systems Engineering Agenda Introduction
Vom Web ins IoT: Schnelleinstieg in Tooling und Entwicklung
 Vom Web ins IoT: Schnelleinstieg in Tooling und Entwicklung Webinar 11.05.2017 Andreas Schmidt @aschmidt75 www.cassini.ag www.thingforward.io @thingforward 2 11.05.17 Agenda Devices für das Internet der
Vom Web ins IoT: Schnelleinstieg in Tooling und Entwicklung Webinar 11.05.2017 Andreas Schmidt @aschmidt75 www.cassini.ag www.thingforward.io @thingforward 2 11.05.17 Agenda Devices für das Internet der
Einführung in das Robot Operating System (ROS)
") Einführung in das Robot Operating System (ROS) Raum: BC414, Tel.: 0203-379 - 3583, E-Mail: michael.korn@uni-due.de Motivation Ziele des Vortrags Robot Operating System (ROS) Nachteile von ERSP und Windows
Einführung in das Robot Operating System (ROS) Raum: BC414, Tel.: 0203-379 - 3583, E-Mail: michael.korn@uni-due.de Motivation Ziele des Vortrags Robot Operating System (ROS) Nachteile von ERSP und Windows
Daten fu r Navigator Mobile (ipad)
") [Kommentare] Inhalte Navigator Mobile für das ipad... 3 Programme und Dateien... 4 Folgende Installationen sind erforderlich:... 4 Es gibt verschiedene Dateiformate.... 4 Die Installationen... 5 Installation
[Kommentare] Inhalte Navigator Mobile für das ipad... 3 Programme und Dateien... 4 Folgende Installationen sind erforderlich:... 4 Es gibt verschiedene Dateiformate.... 4 Die Installationen... 5 Installation
NEWSLETTER. FileDirector Version 2.5 Novelties. Filing system designer. Filing system in WinClient
 Filing system designer FileDirector Version 2.5 Novelties FileDirector offers an easy way to design the filing system in WinClient. The filing system provides an Explorer-like structure in WinClient. The
Filing system designer FileDirector Version 2.5 Novelties FileDirector offers an easy way to design the filing system in WinClient. The filing system provides an Explorer-like structure in WinClient. The
vcdm im Wandel Vorstellung des neuen User Interfaces und Austausch zur Funktionalität V
 vcdm im Wandel Vorstellung des neuen User Interfaces und Austausch zur Funktionalität V0.1 2018-10-02 Agenda vcdm User Interface History Current state of User Interface User Interface X-mas 2018 Missing
vcdm im Wandel Vorstellung des neuen User Interfaces und Austausch zur Funktionalität V0.1 2018-10-02 Agenda vcdm User Interface History Current state of User Interface User Interface X-mas 2018 Missing
ColdFusion 8 PDF-Integration
 ColdFusion 8 PDF-Integration Sven Ramuschkat SRamuschkat@herrlich-ramuschkat.de München & Zürich, März 2009 PDF Funktionalitäten 1. Auslesen und Befüllen von PDF-Formularen 2. Umwandlung von HTML-Seiten
ColdFusion 8 PDF-Integration Sven Ramuschkat SRamuschkat@herrlich-ramuschkat.de München & Zürich, März 2009 PDF Funktionalitäten 1. Auslesen und Befüllen von PDF-Formularen 2. Umwandlung von HTML-Seiten
ISO 15504 Reference Model
 Process flow Remarks Role Documents, data, tools input, output Start Define purpose and scope Define process overview Define process details Define roles no Define metrics Pre-review Review yes Release
Process flow Remarks Role Documents, data, tools input, output Start Define purpose and scope Define process overview Define process details Define roles no Define metrics Pre-review Review yes Release
EEX Kundeninformation 2007-09-05
 EEX Eurex Release 10.0: Dokumentation Windows Server 2003 auf Workstations; Windows Server 2003 Service Pack 2: Information bezüglich Support Sehr geehrte Handelsteilnehmer, Im Rahmen von Eurex Release
EEX Eurex Release 10.0: Dokumentation Windows Server 2003 auf Workstations; Windows Server 2003 Service Pack 2: Information bezüglich Support Sehr geehrte Handelsteilnehmer, Im Rahmen von Eurex Release
Group and Session Management for Collaborative Applications
 Diss. ETH No. 12075 Group and Session Management for Collaborative Applications A dissertation submitted to the SWISS FEDERAL INSTITUTE OF TECHNOLOGY ZÜRICH for the degree of Doctor of Technical Seiences
Diss. ETH No. 12075 Group and Session Management for Collaborative Applications A dissertation submitted to the SWISS FEDERAL INSTITUTE OF TECHNOLOGY ZÜRICH for the degree of Doctor of Technical Seiences
Infrastructure as a Service (IaaS) Solutions for Online Game Service Provision
 Solutions for Online Game Service Provision") Infrastructure as a Service (IaaS) Solutions for Online Game Service Provision Zielsetzung: System Verwendung von Cloud-Systemen für das Hosting von online Spielen (IaaS) Reservieren/Buchen von Resources
Infrastructure as a Service (IaaS) Solutions for Online Game Service Provision Zielsetzung: System Verwendung von Cloud-Systemen für das Hosting von online Spielen (IaaS) Reservieren/Buchen von Resources
Kurzanleitung um Transponder mit einem scemtec TT Reader und der Software UniDemo zu lesen
 Kurzanleitung um Transponder mit einem scemtec TT Reader und der Software UniDemo zu lesen QuickStart Guide to read a transponder with a scemtec TT reader and software UniDemo Voraussetzung: - PC mit der
Kurzanleitung um Transponder mit einem scemtec TT Reader und der Software UniDemo zu lesen QuickStart Guide to read a transponder with a scemtec TT reader and software UniDemo Voraussetzung: - PC mit der
prorm Budget Planning promx GmbH Nordring Nuremberg
 prorm Budget Planning Budget Planning Business promx GmbH Nordring 100 909 Nuremberg E-Mail: support@promx.net Content WHAT IS THE prorm BUDGET PLANNING? prorm Budget Planning Overview THE ADVANTAGES OF
prorm Budget Planning Budget Planning Business promx GmbH Nordring 100 909 Nuremberg E-Mail: support@promx.net Content WHAT IS THE prorm BUDGET PLANNING? prorm Budget Planning Overview THE ADVANTAGES OF
SARA 1. Project Meeting
 SARA 1. Project Meeting Energy Concepts, BMS and Monitoring Integration of Simulation Assisted Control Systems for Innovative Energy Devices Prof. Dr. Ursula Eicker Dr. Jürgen Schumacher Dirk Pietruschka,
SARA 1. Project Meeting Energy Concepts, BMS and Monitoring Integration of Simulation Assisted Control Systems for Innovative Energy Devices Prof. Dr. Ursula Eicker Dr. Jürgen Schumacher Dirk Pietruschka,
Vorstellung RWTH Gründerzentrum
 Vorstellung RWTH Gründerzentrum Once an idea has been formed, the center for entrepreneurship supports in all areas of the start-up process Overview of team and services Development of a business plan
Vorstellung RWTH Gründerzentrum Once an idea has been formed, the center for entrepreneurship supports in all areas of the start-up process Overview of team and services Development of a business plan
Background for Hybrid Processing
 Background for Hybrid Processing Hans Uszkoreit Foundations of LST WS 04/05 Scope Classical Areas of Computational Linguistics: computational morphology, computational syntax computational semantics computational
Background for Hybrid Processing Hans Uszkoreit Foundations of LST WS 04/05 Scope Classical Areas of Computational Linguistics: computational morphology, computational syntax computational semantics computational
Umbenennen eines NetWorker 7.x Servers (UNIX/ Linux)
") NetWorker - Allgemein Tip #293, Seite 1/6 Umbenennen eines NetWorker 7.x Servers (UNIX/ Linux) Dies wird offiziell nicht von unterstützt!!! Sie werden also hierfür keinerlei Support erhalten. Wenn man
NetWorker - Allgemein Tip #293, Seite 1/6 Umbenennen eines NetWorker 7.x Servers (UNIX/ Linux) Dies wird offiziell nicht von unterstützt!!! Sie werden also hierfür keinerlei Support erhalten. Wenn man
IDRT: Unlocking Research Data Sources with ETL for use in a Structured Research Database
 First European i2b2 Academic User Meeting IDRT: Unlocking Research Data Sources with ETL for use in a Structured Research Database The IDRT Team (in alphabetical order): Christian Bauer (presenter), Benjamin
First European i2b2 Academic User Meeting IDRT: Unlocking Research Data Sources with ETL for use in a Structured Research Database The IDRT Team (in alphabetical order): Christian Bauer (presenter), Benjamin
7/15/2014. Stratus everrun Enterprise. Ist die Audio Qualität OK? Fragen bitte per Chat, diese werden im Anschluss beantwortet.
 Stratus everrun Enterprise Zehra Balkic / Patrick Skwara/Georg Dier Avance-eE Migration Stratus Technologies vertraulich 2013 Stratus Technologies Bermuda Ltd. Ist die Audio Qualität OK? Fragen bitte per
Stratus everrun Enterprise Zehra Balkic / Patrick Skwara/Georg Dier Avance-eE Migration Stratus Technologies vertraulich 2013 Stratus Technologies Bermuda Ltd. Ist die Audio Qualität OK? Fragen bitte per
Product Lifecycle Manager
 Product Lifecycle Manager ATLAS9000 GmbH Landauer Str. - 1 D-68766 Hockenheim +49(0)6205 / 202730 Product Lifecycle Management ATLAS PLM is powerful, economical and based on standard technologies. Directory
Product Lifecycle Manager ATLAS9000 GmbH Landauer Str. - 1 D-68766 Hockenheim +49(0)6205 / 202730 Product Lifecycle Management ATLAS PLM is powerful, economical and based on standard technologies. Directory
Context-adaptation based on Ontologies and Spreading Activation
 -1- Context-adaptation based on Ontologies and Spreading Activation ABIS 2007, Halle, 24.09.07 {hussein,westheide,ziegler}@interactivesystems.info -2- Context Adaptation in Spreadr Pubs near my location
-1- Context-adaptation based on Ontologies and Spreading Activation ABIS 2007, Halle, 24.09.07 {hussein,westheide,ziegler}@interactivesystems.info -2- Context Adaptation in Spreadr Pubs near my location
ICON Switzerland 2015 Praxisbeispiel Connections an der Universität Zürich
 ICON Switzerland 2015 Praxisbeispiel Connections an der Universität Zürich mit Demos und Erfahrungen aus Pilotprojekten Roberto Mazzoni (Zentrale Informatik UZH) Roman Meng (Zentrale Informatik UZH) Simon
ICON Switzerland 2015 Praxisbeispiel Connections an der Universität Zürich mit Demos und Erfahrungen aus Pilotprojekten Roberto Mazzoni (Zentrale Informatik UZH) Roman Meng (Zentrale Informatik UZH) Simon
Introduction to Python. Introduction. First Steps in Python. pseudo random numbers. May 2016
 to to May 2016 to What is Programming? All computers are stupid. All computers are deterministic. You have to tell the computer what to do. You can tell the computer in any (programming) language) you
to to May 2016 to What is Programming? All computers are stupid. All computers are deterministic. You have to tell the computer what to do. You can tell the computer in any (programming) language) you
Hybride Cloud-Infrastrukturen Bereitstellung & Verwaltung mit System Center 2012
 Hybride Cloud-Infrastrukturen Bereitstellung & Verwaltung mit System Center 2012 Roj Mircov TSP Datacenter Microsoft Virtualisierung Jörg Ostermann TSP Datacenter Microsoft Virtualisierung 1 AGENDA Virtual
Hybride Cloud-Infrastrukturen Bereitstellung & Verwaltung mit System Center 2012 Roj Mircov TSP Datacenter Microsoft Virtualisierung Jörg Ostermann TSP Datacenter Microsoft Virtualisierung 1 AGENDA Virtual
Cloud und Big Data als Sprungbrett in die vernetzte Zukunft am Beispiel Viessmann
 Cloud und Big Data als Sprungbrett in die vernetzte Zukunft am Beispiel Viessmann Adam Stambulski Project Manager Viessmann R&D Center Wroclaw Dr. Moritz Gomm Business Development Manager Zühlke Engineering
Cloud und Big Data als Sprungbrett in die vernetzte Zukunft am Beispiel Viessmann Adam Stambulski Project Manager Viessmann R&D Center Wroclaw Dr. Moritz Gomm Business Development Manager Zühlke Engineering
Word-CRM-Upload-Button. User manual
 Word-CRM-Upload-Button User manual Word-CRM-Upload for MS CRM 2011 Content 1. Preface... 3 2. Installation... 4 2.1. Requirements... 4 2.1.1. Clients... 4 2.2. Installation guidelines... 5 2.2.1. Client...
Word-CRM-Upload-Button User manual Word-CRM-Upload for MS CRM 2011 Content 1. Preface... 3 2. Installation... 4 2.1. Requirements... 4 2.1.1. Clients... 4 2.2. Installation guidelines... 5 2.2.1. Client...
Lehrstuhl für Datenverarbeitung. Technische Universität München. Leistungskurs C++ Subversion / CMake
 Leistungskurs C++ Subversion / CMake Subversion am LDV Repository der Gruppen: https://www2.ldv.ei.tum.de/repos/14cppx Anlegen des Repository: svn checkout https://www2.ldv.ei.tum.de/repos/14cppx cd 14cppX
Leistungskurs C++ Subversion / CMake Subversion am LDV Repository der Gruppen: https://www2.ldv.ei.tum.de/repos/14cppx Anlegen des Repository: svn checkout https://www2.ldv.ei.tum.de/repos/14cppx cd 14cppX
Vorteile von Java und Konvergenz Service Creation mit JAIN Network Management mit JMX Fazit
 Hochschule für Technik und Architektur Chur Dr. Bruno Studer Studienleiter NDS Telecom, FH-Dozent bruno.studer@fh-htachur.ch 1 GSM: 079/610 51 75 Agenda Vorteile von Java und Konvergenz Service Creation
Hochschule für Technik und Architektur Chur Dr. Bruno Studer Studienleiter NDS Telecom, FH-Dozent bruno.studer@fh-htachur.ch 1 GSM: 079/610 51 75 Agenda Vorteile von Java und Konvergenz Service Creation
+++ Bitte nutzen Sie die integrierte Audio-Funktion von WebEx (Menü Audio -> Integrated Voice Conference -> Start auswählen), um uns zu hören!!!.
, um uns zu hören!!!.") +++ Bitte nutzen Sie die integrierte Audio-Funktion von WebEx (Menü Audio -> Integrated Voice Conference -> Start auswählen), um uns zu hören!!!. +++ Oracle Mobile Cloud Service (MCS) MCS SDK & MAF MCS
+++ Bitte nutzen Sie die integrierte Audio-Funktion von WebEx (Menü Audio -> Integrated Voice Conference -> Start auswählen), um uns zu hören!!!. +++ Oracle Mobile Cloud Service (MCS) MCS SDK & MAF MCS
1.1 VoIP - Kein Notruf möglich. 1.2 VoIP - Vorrang von Notrufen
 Read Me System Software 9.1.10 Patch 4 PED/BED Deutsch Folgende Fehler sind in Systemsoftware 9.1.10 Patch 4 korrigiert worden: 1.1 VoIP - Kein Notruf möglich (ID 19307) In bestimmten Konfigurationen konnte
Read Me System Software 9.1.10 Patch 4 PED/BED Deutsch Folgende Fehler sind in Systemsoftware 9.1.10 Patch 4 korrigiert worden: 1.1 VoIP - Kein Notruf möglich (ID 19307) In bestimmten Konfigurationen konnte
Konzept zur Push Notification/GCM für das LP System (vormals BDS System)
") Konzept zur Push Notification/GCM für das LP System (vormals BDS System) Wir Push Autor: Michael Fritzsch Version: 1.0 Stand: 04. Februar 2015 Inhalt 1. Was ist eine Push Notification? 2. Wofür steht GCM?
Konzept zur Push Notification/GCM für das LP System (vormals BDS System) Wir Push Autor: Michael Fritzsch Version: 1.0 Stand: 04. Februar 2015 Inhalt 1. Was ist eine Push Notification? 2. Wofür steht GCM?
Industrial USB3.0 Miniature Camera with color and monochrome sensor
 Welcome to the presentation Industrial USB3.0 Miniature Camera with color and monochrome sensor & Data rates of modern image sensors S. 1/12 Vortrag_Spectronet_USB3.0_Datenverarbeitung_ENGLISCH_Vorlage_für_pdf_v1_MH20032014
Welcome to the presentation Industrial USB3.0 Miniature Camera with color and monochrome sensor & Data rates of modern image sensors S. 1/12 Vortrag_Spectronet_USB3.0_Datenverarbeitung_ENGLISCH_Vorlage_für_pdf_v1_MH20032014
ITSM (BOX & CONSULTING) Christian Hager, MSc
 Christian Hager, MSc") ITSM (BOX & CONSULTING) Christian Hager, MSc INHALT Ausgangssituation ITSM Consulting ITSM Box Zentrales Anforderungsmanagement Beispielhafter Zeitplan Nutzen von ITSM Projekten mit R-IT Zusammenfassung
ITSM (BOX & CONSULTING) Christian Hager, MSc INHALT Ausgangssituation ITSM Consulting ITSM Box Zentrales Anforderungsmanagement Beispielhafter Zeitplan Nutzen von ITSM Projekten mit R-IT Zusammenfassung
Archive / Backup System für OpenVMS
 Archive / Backup System für OpenVMS DECUS Symposium 2002 Bonn Vortrag-Nr. 3C04 Günther Fröhlin Compaq Computer Corporation Colorado Springs, USA 1 Highlights V4.0 Auslieferung Januar 2002 Hauptversion
Archive / Backup System für OpenVMS DECUS Symposium 2002 Bonn Vortrag-Nr. 3C04 Günther Fröhlin Compaq Computer Corporation Colorado Springs, USA 1 Highlights V4.0 Auslieferung Januar 2002 Hauptversion
Newsletter-Pluginsim Vergleich
 Newsletter-Pluginsim Vergleich MailPoet Newsletter Tribulant Newsletters MailPoet Drag & drop newsletter editor Send your latest posts automatically Single or double opt-in, your choice Get stats for your
Newsletter-Pluginsim Vergleich MailPoet Newsletter Tribulant Newsletters MailPoet Drag & drop newsletter editor Send your latest posts automatically Single or double opt-in, your choice Get stats for your
Windows 10 Datenschutzkonfiguration - Anlage zu: Datenschutzfreundlicher Einsatz von Windows 10 -
 Windows 10 Datenschutzkonfiguration - Anlage zu: Datenschutzfreundlicher Einsatz von Windows 10 - Stand: April 2016 Bereich Gruppenrichtlinie/Einstellungsort Einstellungsmöglichkeit Empfohlene Einstellung
Windows 10 Datenschutzkonfiguration - Anlage zu: Datenschutzfreundlicher Einsatz von Windows 10 - Stand: April 2016 Bereich Gruppenrichtlinie/Einstellungsort Einstellungsmöglichkeit Empfohlene Einstellung
Serverless Architecture with Azure-Functions
 Serverless Architecture with Azure-Functions Mark Allibone @mallibone Noser Engineering AG 2017, Alle Rechte vorbehalten. Mark Allibone, Head of Mobile @mallibone Noser Engineering AG Ambassador https://mallibone.com
Serverless Architecture with Azure-Functions Mark Allibone @mallibone Noser Engineering AG 2017, Alle Rechte vorbehalten. Mark Allibone, Head of Mobile @mallibone Noser Engineering AG Ambassador https://mallibone.com
Cause every minute counts. three60mobile telecom GmbH. - mobile solutions - Stephan.mairhofer@three60mobile.com
 Cause every minute counts three60mobile telecom GmbH - mobile solutions - Stephan.mairhofer@three60mobile.com Executive Summary three60mobile is software solutions for mobile phones Lösungen: SmartDevMgr
Cause every minute counts three60mobile telecom GmbH - mobile solutions - Stephan.mairhofer@three60mobile.com Executive Summary three60mobile is software solutions for mobile phones Lösungen: SmartDevMgr
FEM Isoparametric Concept
 FEM Isoparametric Concept home/lehre/vl-mhs--e/cover_sheet.tex. p./26 Table of contents. Interpolation Functions for the Finite Elements 2. Finite Element Types 3. Geometry 4. Interpolation Approach Function
FEM Isoparametric Concept home/lehre/vl-mhs--e/cover_sheet.tex. p./26 Table of contents. Interpolation Functions for the Finite Elements 2. Finite Element Types 3. Geometry 4. Interpolation Approach Function
Kybernetik Intelligent Agents- Decision Making
 Kybernetik Intelligent Agents- Decision Making Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 03. 07. 2012 Intelligent Agents Environment Agent Intelligent
Kybernetik Intelligent Agents- Decision Making Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 mohamed.oubbati@uni-ulm.de 03. 07. 2012 Intelligent Agents Environment Agent Intelligent
GA-LCD-Monitor RTR-SET PV-Vision
 GA-LCD-Monitor RTR-SET PV-Vision GA-LCD-Monitor RTR-SET PV-Vision Artikelnummer 510 81xx (xx für Zoll z.b. 46) (LOCAL-SET) Item number 510 81xx (xx for Zoll eg 46) (LOCAL-SET) Anzeigentechnik: LCD, 1920
GA-LCD-Monitor RTR-SET PV-Vision GA-LCD-Monitor RTR-SET PV-Vision Artikelnummer 510 81xx (xx für Zoll z.b. 46) (LOCAL-SET) Item number 510 81xx (xx for Zoll eg 46) (LOCAL-SET) Anzeigentechnik: LCD, 1920
Der Begriff Cloud. Eine Spurensuche. Patric Hafner 29.06.2012. geops
 Der Begriff Cloud Eine Spurensuche Patric Hafner geops 29.06.2012 Motivation Der größte Hype der IT-Branche Hype heißt sowohl Rummel als auch Schwindel slashdot.org The cloud represents a foundational
Der Begriff Cloud Eine Spurensuche Patric Hafner geops 29.06.2012 Motivation Der größte Hype der IT-Branche Hype heißt sowohl Rummel als auch Schwindel slashdot.org The cloud represents a foundational
file:///c:/users/wpzsco/appdata/local/temp/tmp373d.tmp.htm
 Seite 1 von 5 Besucherinformation und -lenkung: Typ 09 Wegweiser Typenbeschreibungen File Geodatabase Table Thumbnail Not Available Tags Infrastruktur, Besucherinformation, Besucherlenkung, Schild, Standort,
Seite 1 von 5 Besucherinformation und -lenkung: Typ 09 Wegweiser Typenbeschreibungen File Geodatabase Table Thumbnail Not Available Tags Infrastruktur, Besucherinformation, Besucherlenkung, Schild, Standort,
UM ALLE DATEN ZU KOPIEREN. ZUNÄCHST die Daten des alten Telefons auf einen Computer kopieren
 IPHONE UM ALLE DATEN des alten Telefons auf einen Computer Software von welcomehome.to/nokia auf Ihrem PC oder Mac. verbinden Sie Ihr altes Telefon über 3. Wenn Sie Outlook nutzen, öffnen Sie itunes, um
IPHONE UM ALLE DATEN des alten Telefons auf einen Computer Software von welcomehome.to/nokia auf Ihrem PC oder Mac. verbinden Sie Ihr altes Telefon über 3. Wenn Sie Outlook nutzen, öffnen Sie itunes, um
CX6530. Keyvi3 Verwaltungssoftware CX6530 MS Access. Keyvi3 Management Software CX6530 MS Access. Keyvi3 Verwaltungssoftware
 Keyvi3 Verwaltungssoftware Keyvi3 Management Software CX6530 Keyvi3 Verwaltungssoftware CX6530 MS Access Mit der Keyvi Verwaltungssoftware für Clex prime wird die Schließanlage zentral und komfortabel
Keyvi3 Verwaltungssoftware Keyvi3 Management Software CX6530 Keyvi3 Verwaltungssoftware CX6530 MS Access Mit der Keyvi Verwaltungssoftware für Clex prime wird die Schließanlage zentral und komfortabel
Exkursion zu Capgemini Application Services Custom Solution Development. Ankündigung für Februar 2013 Niederlassung Stuttgart
 Exkursion zu Capgemini Application Services Custom Solution Development Ankündigung für Februar 2013 Niederlassung Stuttgart Ein Nachmittag bei Capgemini in Stuttgart Fachvorträge und Diskussionen rund
Exkursion zu Capgemini Application Services Custom Solution Development Ankündigung für Februar 2013 Niederlassung Stuttgart Ein Nachmittag bei Capgemini in Stuttgart Fachvorträge und Diskussionen rund
Die EnMAP-Box Ziele, Stand der Entwicklung und Ausblick
 Die EnMAP-Box Ziele, und Ausblick Sebastian van der Linden, Andreas Rabe, Pedro Leitão, Patrick Hostert sebastian.linden@geo.hu-berlin.de http://www.hu-geomatics.de 25.10.2010 2. Nationaler EnMAP-Workshop
Die EnMAP-Box Ziele, und Ausblick Sebastian van der Linden, Andreas Rabe, Pedro Leitão, Patrick Hostert sebastian.linden@geo.hu-berlin.de http://www.hu-geomatics.de 25.10.2010 2. Nationaler EnMAP-Workshop
Lokale Installation von DotNetNuke 4 ohne IIS
 Lokale Installation von DotNetNuke 4 ohne IIS ITM GmbH Wankelstr. 14 70563 Stuttgart http://www.itm-consulting.de Benjamin Hermann hermann@itm-consulting.de 12.12.2006 Agenda Benötigte Komponenten Installation
Lokale Installation von DotNetNuke 4 ohne IIS ITM GmbH Wankelstr. 14 70563 Stuttgart http://www.itm-consulting.de Benjamin Hermann hermann@itm-consulting.de 12.12.2006 Agenda Benötigte Komponenten Installation
Optionale Übung Hardware Konfiguration mit HCD
 Optionale Übung Hardware Konfiguration mit HCD Erstellen Sie eine Hardware Konfiguration via HCD für folgende Konstellation. 2064-106 in Basic Mode - CPCA Type CHPID BL BL CNC CNC - - - CNC CNC CNC BL
Optionale Übung Hardware Konfiguration mit HCD Erstellen Sie eine Hardware Konfiguration via HCD für folgende Konstellation. 2064-106 in Basic Mode - CPCA Type CHPID BL BL CNC CNC - - - CNC CNC CNC BL
Installation mit Lizenz-Server verbinden
 Einsteiger Fortgeschrittene Profis markus.meinl@m-quest.ch Version 1.0 Voraussetzungen für diesen Workshop 1. Die M-Quest Suite 2005-M oder höher ist auf diesem Rechner installiert 2. Der M-Lock 2005 Lizenzserver
Einsteiger Fortgeschrittene Profis markus.meinl@m-quest.ch Version 1.0 Voraussetzungen für diesen Workshop 1. Die M-Quest Suite 2005-M oder höher ist auf diesem Rechner installiert 2. Der M-Lock 2005 Lizenzserver
SemTalk Services. SemTalk UserMeeting 29.10.2010
 SemTalk Services SemTalk UserMeeting 29.10.2010 Problemstellung Immer mehr Anwender nutzen SemTalk in Verbindung mit SharePoint Mehr Visio Dokumente Viele Dokumente mit jeweils wenigen Seiten, aber starker
SemTalk Services SemTalk UserMeeting 29.10.2010 Problemstellung Immer mehr Anwender nutzen SemTalk in Verbindung mit SharePoint Mehr Visio Dokumente Viele Dokumente mit jeweils wenigen Seiten, aber starker
Level of service estimation at traffic signals based on innovative traffic data services and collection techniques
 Level of service estimation at traffic signals based on innovative traffic data services and collection techniques Authors: Steffen Axer, Jannis Rohde, Bernhard Friedrich Network-wide LOS estimation at
Level of service estimation at traffic signals based on innovative traffic data services and collection techniques Authors: Steffen Axer, Jannis Rohde, Bernhard Friedrich Network-wide LOS estimation at