Innovationsvorhaben Radarmeter-3D
|
|
|
- Jan Küchler
- vor 5 Jahren
- Abrufe
Transkript



 gefördert.")
1 Innovationsvorhaben Radarmeter-3D Die Projektpartner: 1. Unternehmen - IBG Robotronic GmbH - KROHNE Innovation GmbH - IGA mbh 2. Ruhr-Universität Bochum - RUB-EST - RUB-ESIT - RUB-INSYS Das Projekt Radarmeter-3D wird durch die Europäische Union und das Land Nordrhein-Westfalen aus Mitteln des Europäischen Fonds für regionale Entwicklung (EFRE) gefördert. Assoziierte Partner: - HÜBNER / HFSE GmbH - Etalon AG - ISRA AG PROJEKTTRÄGER
2 Radarmeter-3D Industrieroboter sind aufgrund von zu ungenauer Positionierung für viele Hochpräzisionsanwendungen wie z.b. Bearbeitungsprozesse nur eingeschränkt geeignet. Ziel des Projekts Radarmeter-3D ist die Entwicklung eines intelligenten Navigationssensorsystems für Industrieroboter, das sich zur adaptiven Korrektur von Roboterbahnen eignet. Dieses Sensorsystem soll auf mindestens drei Radarsensoren basieren, die mittels a-priori Informationen über im Raum verteilte feste Ziele mikrometergenaue Entfernungsmessungen vornehmen und diese mittels Multilateration zu einem genauen 3D- Positionswert verrechnen, der dann zur präzisen (besser 100 μm wird angestrebt) Nachregelung der Roboterposition genutzt wird. Vorteil der Nutzung von innovativer Radartechnik ist die im Vergleich zu kameraoder laserbasierten Systemen bisher unerreichte Kombination aus ausreichend hoher Genauigkeit bei gleichzeitig geringen Kosten. Die Ruhr-Universität Bochum hält mit ihren mehrfach international prämierten Radarsensoren mit großem Abstand den Weltrekord für extrem präzise und absolute Radarentfernungsmessungen. Diese neue Technologie soll nun durch Einsatz mehrerer Sensoren in Kombination mit intelligenter Sensordatenfusion von 1D- Entfernungsmessungen zu einer 3D-Messung erweitert werden und eine für viele Präzisionsanwendungen (Fräsen, Schleifen, Montage) langersehnte und kostengünstige Lösung des grundlegenden Problems der präzisen Positionierung in der Robotik bieten. Hierdurch lassen sich Roboter effizienter in unterschiedlichsten Anwendungen nutzen, da vor allem Ressourcen durch die vielen intermittierenden Schritte bei der manuellen Korrektur der Roboterbahnen geschont werden und sich die Roboter deutlich flexibler nutzen lassen. Darüber hinaus kann ein solcher Sensor neben der Navigation auch zur Abbildung und Analyse der Umgebung des Roboters eingesetzt werden, was vor allem in adaptiven oder kooperierenden Roboterszenarien zukünftig völlig neue Möglichkeiten bietet.
3 Radarmeter-3D Die IGA mbh zeichnet bei diesem Projekt unter anderem für die Konsortialführung verantwortlich. Als Spezialist für die Präzisionsrobotik und adaptiver Robotersysteme bringt sich die IGA in die Entwicklung, Konstruktion und Fertigung der notwendigen Mechatronischen und Mechanik-Komponenten des Sensorsystems und von Aktoren der Demonstratoren ein. Des Weiteren übernimmt die IGA mbh die Aufgabe des Systemintegrators des Sensorsystems. Radarmeter-3D ist ein gemeinschaftliches Vorhaben von IBG Robotronic GmbH, Krohne Innovation GmbH und der Lehrstühle für Elektronische Schaltungstechnik, für Eingebettete Systeme der Informationstechnik und für Integrierte Systeme der Ruhr-Universität Bochum sowie der IGA GmbH aus Dortmund.
4 Die Leitvision des Projektes Das Projekt Radarmeter 3D verfolgt das Ziel Industrieroboter in komplexen Anlagen mit Hilfe von miniaturisierten Radarsensorsystemen automatisch zu referenzieren und die, den Prozess führenden Bewegungsbahnen des Roboters automatisiert zu optimieren


5 Die Leitvision des Projektes Geplanter Einsatz der Radarsysteme Basiskomponenten des Radarsensorsystems
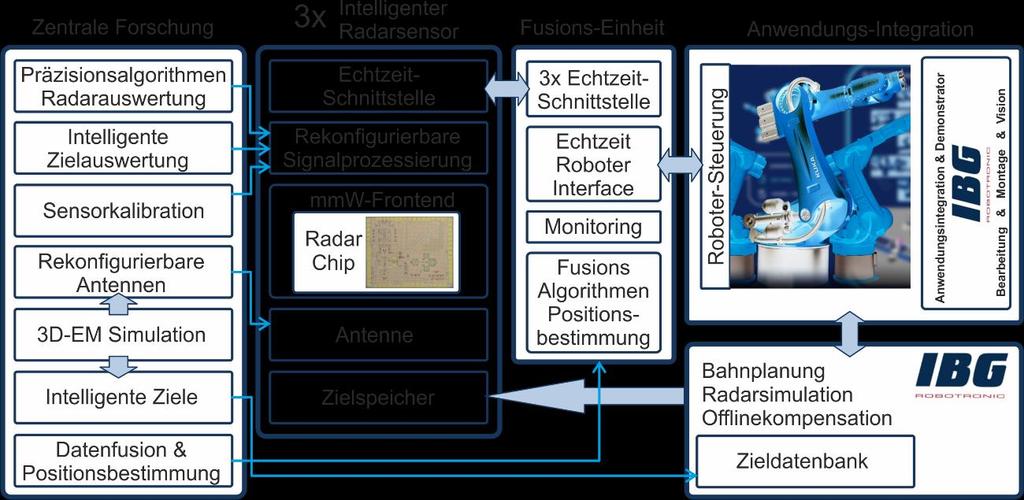
6 Die Projektarchitektur von Radarmeter-3D
7 Die Projektkoordination IGA mbh Prof. Dr.-Ing. habil. Gerd Grube Joseph-von-Fraunhoferstr Dortmund Telefon:
Hohe Wachstumsraten für ISRA Systeme im Automotive- und im Assembly-Bereich
 3D Machine Vision sorgt für höchste Produktivität Hohe Wachstumsraten für ISRA Systeme im Automotive- und im Assembly-Bereich Bei der Produktion hochwertiger Fahrzeuge sowie in Montageprozessen kommt es
3D Machine Vision sorgt für höchste Produktivität Hohe Wachstumsraten für ISRA Systeme im Automotive- und im Assembly-Bereich Bei der Produktion hochwertiger Fahrzeuge sowie in Montageprozessen kommt es
School of Engineering Institut für Mechatronische Systeme (IMS)
") School of Engineering Institut für Mechatronische Systeme (IMS) Zürcher Fachhochschule www.ims.zhaw.ch Forschung & Entwicklung Institut für Mechatronische Systeme (IMS) Mechatronik bringt die Disziplinen
School of Engineering Institut für Mechatronische Systeme (IMS) Zürcher Fachhochschule www.ims.zhaw.ch Forschung & Entwicklung Institut für Mechatronische Systeme (IMS) Mechatronik bringt die Disziplinen
Arbeitsblatt: Wie rede ich mit einem Roboter?
 Arbeitsblatt: Wie rede ich mit einem Roboter? Ausgangslage: Ein Roboter besitzt Sensoren, um seine Umgebung wahrzunehmen, und Aktoren, um seine Umgebung zu beeinflussen. Auch Menschen besitzen Sensoren
Arbeitsblatt: Wie rede ich mit einem Roboter? Ausgangslage: Ein Roboter besitzt Sensoren, um seine Umgebung wahrzunehmen, und Aktoren, um seine Umgebung zu beeinflussen. Auch Menschen besitzen Sensoren
Oberflächenbearbeitung. kraftgesteuerten Robotern. rcs1-steuerungstechnik
 Oberflächenbearbeitung mit kraftgesteuerten Robotern und rcs1-steuerungstechnik Aufgabenstellung: Nach wie vor stellt die Oberflächenbearbeitung bei der Automatisierung mit Robotern eine große Herausforderung
Oberflächenbearbeitung mit kraftgesteuerten Robotern und rcs1-steuerungstechnik Aufgabenstellung: Nach wie vor stellt die Oberflächenbearbeitung bei der Automatisierung mit Robotern eine große Herausforderung
SO MUSS ROBOTIK SEIN EINFACH, FLEXIBEL UND GÜNSTIG AUTOMATISIEREN
 SO MUSS ROBOTIK SEIN EINFACH, FLEXIBEL UND GÜNSTIG AUTOMATISIEREN EINFACH, FLEXIBEL UND GÜNSTIG AUTOMATISIEREN J+K ROBOTERTECHNIK Preiswerte und flexible Automatisierung für jedermann. Es ist mir eine
SO MUSS ROBOTIK SEIN EINFACH, FLEXIBEL UND GÜNSTIG AUTOMATISIEREN EINFACH, FLEXIBEL UND GÜNSTIG AUTOMATISIEREN J+K ROBOTERTECHNIK Preiswerte und flexible Automatisierung für jedermann. Es ist mir eine
Durch Brückenbildung Synergien zwischen EFRE und Horizont 2020 schaffen
 Durch Brückenbildung Synergien zwischen EFRE und Horizont 2020 schaffen Michael Guth ZENIT GmbH 01. Juni 2016 Strategie Europa 2020 Wachstumsstrategie aus der Wirtschaftskrise Wachstum Ziele Maßnahmen
Durch Brückenbildung Synergien zwischen EFRE und Horizont 2020 schaffen Michael Guth ZENIT GmbH 01. Juni 2016 Strategie Europa 2020 Wachstumsstrategie aus der Wirtschaftskrise Wachstum Ziele Maßnahmen
Stiftungsprofessur für Systemzuverlässigkeit in Elektromobilität und Energiemanagement
 Stiftungsprofessur für Systemzuverlässigkeit in Elektromobilität und Energiemanagement Stiftungs-Professur Systemzuverlässigkeit in Elektromobilität und Energiemanagement Start: 1. April 2012 Eingebettet
Stiftungsprofessur für Systemzuverlässigkeit in Elektromobilität und Energiemanagement Stiftungs-Professur Systemzuverlässigkeit in Elektromobilität und Energiemanagement Start: 1. April 2012 Eingebettet

Mechatronische Systemlösungen zur aktiven Schallkompensation
 Mechatronische Systemlösungen zur aktiven Schallkompensation Prof. Dr.-Ing. Joachim Waßmuth Fachbereich Ingenieurwissenschaften und Mathematik Am Stadtholz 24 33609 Bielefeld Fon +49.521.106-7508 Fax +49.521.106-7190
Mechatronische Systemlösungen zur aktiven Schallkompensation Prof. Dr.-Ing. Joachim Waßmuth Fachbereich Ingenieurwissenschaften und Mathematik Am Stadtholz 24 33609 Bielefeld Fon +49.521.106-7508 Fax +49.521.106-7190
Modellgestützte Online-Programmierverfahren für Industrieroboter
 Modellgestützte Online-Programmierverfahren für Industrieroboter 40. Sitzung des FA 4.13 Steuerung und Regelung von Robotern Universität Karlsruhe(TH) Institut für Prozessrechentechnik,Automation und Robotik
Modellgestützte Online-Programmierverfahren für Industrieroboter 40. Sitzung des FA 4.13 Steuerung und Regelung von Robotern Universität Karlsruhe(TH) Institut für Prozessrechentechnik,Automation und Robotik
Entwicklung eines mobilen Roboters für die automatisierte Instandhaltung von Materialflusssystemen
 Entwicklung eines mobilen Roboters für die automatisierte Instandhaltung von Materialflusssystemen Von der Fakultät Maschinenbau der Technischen Universität Dortmund zur Erlangung des Grades eines Doktor-Ingenieurs
Entwicklung eines mobilen Roboters für die automatisierte Instandhaltung von Materialflusssystemen Von der Fakultät Maschinenbau der Technischen Universität Dortmund zur Erlangung des Grades eines Doktor-Ingenieurs
Datengestützter Durchblick im Wald
 X KWF-Tagung 2012: Datengestützter Durchblick im Wald RIF präsentierte das 4D-Geoinformationssystem "Virtueller Wald" mit Neuerungen bei Waldinventur und Datenhaltung Dortmund, 04. Juli 2012 - Datengestützter
X KWF-Tagung 2012: Datengestützter Durchblick im Wald RIF präsentierte das 4D-Geoinformationssystem "Virtueller Wald" mit Neuerungen bei Waldinventur und Datenhaltung Dortmund, 04. Juli 2012 - Datengestützter
SCHULUNGSANGEBOTE IM IOT-LABOR. Programm für Schulen, Berufsschulen und Unternehmen
 SCHULUNGSANGEBOTE IM IOT-LABOR Programm für Schulen, Berufsschulen und Unternehmen Was lernen Sie bei uns zum Thema IoT? Wenn Informationstechnik in Form von Sensoren und Mikroprozessoren im großen Stil
SCHULUNGSANGEBOTE IM IOT-LABOR Programm für Schulen, Berufsschulen und Unternehmen Was lernen Sie bei uns zum Thema IoT? Wenn Informationstechnik in Form von Sensoren und Mikroprozessoren im großen Stil
PER- FEKTION IST, WENN ES AN NICHTS FEHLT. perfect feeling
 PER- FEKTION IST, WENN ES AN NICHTS FEHLT. perfect feeling UNTERNEHMEN Gründung 2006 Inhaber und CEO DI Dr. Ronald Naderer, MBA Österreichisches High-Tech Unternehmen mit Stammsitz in Linz Weltweit führend
PER- FEKTION IST, WENN ES AN NICHTS FEHLT. perfect feeling UNTERNEHMEN Gründung 2006 Inhaber und CEO DI Dr. Ronald Naderer, MBA Österreichisches High-Tech Unternehmen mit Stammsitz in Linz Weltweit führend
RIS3 Feld Nachhaltige und intelligente Mobilität und Logistik
 Kunststoff-basierte integrierte KFZ-Antennen für die funktechnische Vernetzung von Fahrzeugen KUBINKA Thomas Wack, Wiegand GmbH Schlotheim RIS3 Jahresveranstaltung, 28.11.2017, Erfurt Dieses Projekt wird
Kunststoff-basierte integrierte KFZ-Antennen für die funktechnische Vernetzung von Fahrzeugen KUBINKA Thomas Wack, Wiegand GmbH Schlotheim RIS3 Jahresveranstaltung, 28.11.2017, Erfurt Dieses Projekt wird
EINFACH. Seite 3. Einfach besser sein! - ein Kundenvorteil, aus dem eine Philosophie entstanden ist.
 INHALT EINFACH BESSER SEIN! Christoph Liebers GmbH & Co. KG Werkzeuge und Platinen Lilienthalstraße 21 D- 85080 Gaimersheim Telefon + 49 8458 32 76-0 Telefax + 49 8458 32 76-66 info@liebers.de www.liebers.de
INHALT EINFACH BESSER SEIN! Christoph Liebers GmbH & Co. KG Werkzeuge und Platinen Lilienthalstraße 21 D- 85080 Gaimersheim Telefon + 49 8458 32 76-0 Telefax + 49 8458 32 76-66 info@liebers.de www.liebers.de
Berlin Online Bahnkorrektur eines Industrieroboters basierend auf Laser-Messdaten
 Berlin 21.03.2014 Online Bahnkorrektur eines Industrieroboters basierend auf Laser-Messdaten Dipl. Ing. Kaveh Haddadian Gliederung 1. Vorstellung des Instituts 2. Motivation 3. Problemstellung / Lösungsidee
Berlin 21.03.2014 Online Bahnkorrektur eines Industrieroboters basierend auf Laser-Messdaten Dipl. Ing. Kaveh Haddadian Gliederung 1. Vorstellung des Instituts 2. Motivation 3. Problemstellung / Lösungsidee
CARRY TUGGER FORKLIFT CUSTOMIZED. Intralogistik Mobile Robotik
 CARRY TUGGER FORKLIFT CUSTOMIZED Intralogistik Mobile Robotik 2 Grenzebach schließt die Automatisierungslücke Das Familienunternehmen Grenzebach ist seit Generationen ein verlässlicher, innovativer Anbieter
CARRY TUGGER FORKLIFT CUSTOMIZED Intralogistik Mobile Robotik 2 Grenzebach schließt die Automatisierungslücke Das Familienunternehmen Grenzebach ist seit Generationen ein verlässlicher, innovativer Anbieter
AUTOZULIEFERER UND DIE BILATERALEN. Wirtschaftslunch
 Wirtschaftslunch Vorstellen Felss Gruppe Fakten zum Standort Schweiz Felss Rotaform und die Bilateralen Verträge IHZ-Wirtschaftslunch 17. November 2015 Seite 2 DIE FELSS GRUPPE Unsere Kompetenzen Die Felss
Wirtschaftslunch Vorstellen Felss Gruppe Fakten zum Standort Schweiz Felss Rotaform und die Bilateralen Verträge IHZ-Wirtschaftslunch 17. November 2015 Seite 2 DIE FELSS GRUPPE Unsere Kompetenzen Die Felss
Robotics. Flex Finishing Force Control Kraftsteuerung für Roboterbearbeitungsprozesse
 Robotics Flex Finishing Force Control Kraftsteuerung für Roboterbearbeitungsprozesse Force Control (FC) Der traditionelle Weg einen Roboter zu programmieren war, den Pfad, die Verfahrgeschwindigkeit sowie
Robotics Flex Finishing Force Control Kraftsteuerung für Roboterbearbeitungsprozesse Force Control (FC) Der traditionelle Weg einen Roboter zu programmieren war, den Pfad, die Verfahrgeschwindigkeit sowie
Vom Standardroboter zum Spezialisten
 Vom Standardroboter zum Spezialisten Inhalt Kurzporträt Stäubli Standardroboter Baureihen Technologie Eigenschaften Anwendungen Spezialroboter Einsatzzweck Modifikationen Anwendungen 2 Stäubli Konzern
Vom Standardroboter zum Spezialisten Inhalt Kurzporträt Stäubli Standardroboter Baureihen Technologie Eigenschaften Anwendungen Spezialroboter Einsatzzweck Modifikationen Anwendungen 2 Stäubli Konzern
Elektrische Antriebe und Leistungselektronik für Bachelor und Master
 der Elektrischen Energietechnik für Bachelor und Master Informationen für Studenten Elektrotechnisches Institut der Universität Karlsruhe Stand Januar 2009 Elektrische Energietechnik Die Elektrische Energietechnik
der Elektrischen Energietechnik für Bachelor und Master Informationen für Studenten Elektrotechnisches Institut der Universität Karlsruhe Stand Januar 2009 Elektrische Energietechnik Die Elektrische Energietechnik
Das E-Auto und intelligente Mobilitätskonzepte für übermorgen
 Das E-Auto und intelligente Mobilitätskonzepte für übermorgen Sicht der Forschung aus dem Bereich Künstliche Intelligenz und Robotik 31.10.2013, Baunatal Jens Mey DFKI Bremen & Universität Bremen Robotics
Das E-Auto und intelligente Mobilitätskonzepte für übermorgen Sicht der Forschung aus dem Bereich Künstliche Intelligenz und Robotik 31.10.2013, Baunatal Jens Mey DFKI Bremen & Universität Bremen Robotics
RIS3 Feld Informations- und Kommunikationstechnologien, innovative und produktionsnahe Dienstleistungen
 Roboterassistiertes Gangtraining in der orthopädischen Rehabilitation ROGER Dr. Andreas Bley, MetraLabs GmbH Ilmenau RIS3 Jahresveranstaltung, 28.11.2017, Erfurt Dieses Projekt wird von der Europäischen
Roboterassistiertes Gangtraining in der orthopädischen Rehabilitation ROGER Dr. Andreas Bley, MetraLabs GmbH Ilmenau RIS3 Jahresveranstaltung, 28.11.2017, Erfurt Dieses Projekt wird von der Europäischen
Nutzung von virtuellen Stadtmodellen für neue Technologien
 Nutzung von virtuellen Stadtmodellen für neue Technologien Die Nutzung von Konzept Demonstratoren um neue Wege für die Mensch-Maschine-Schnittstelle zu finden Leonhard Vogelmeier 6 April 2017 Gliederung
Nutzung von virtuellen Stadtmodellen für neue Technologien Die Nutzung von Konzept Demonstratoren um neue Wege für die Mensch-Maschine-Schnittstelle zu finden Leonhard Vogelmeier 6 April 2017 Gliederung
Mechatronik Digitale Produktentwicklung Smart Production Energie- & Umweltmanagement
 BACHELORSTUDIengang Maschinenbau Mechatronik Digitale Produktentwicklung Smart Production Energie- & Umweltmanagement Maschinenbau Vorsprung durch Studier- Technik! Als Maschinenbauingenieur beschäftigst
BACHELORSTUDIengang Maschinenbau Mechatronik Digitale Produktentwicklung Smart Production Energie- & Umweltmanagement Maschinenbau Vorsprung durch Studier- Technik! Als Maschinenbauingenieur beschäftigst
Welche funkt am längsten? Funktechnologien und Energieeffizienz
 Wireless Automation, 28.02./01.03.2007 Welche funkt am längsten? Funktechnologien und Energieeffizienz Dr.-Ing. Elke Mackensen NewTec GmbH System-Entwicklung und Beratung Heinrich-von-Stephan-Str. 8b 79100
Wireless Automation, 28.02./01.03.2007 Welche funkt am längsten? Funktechnologien und Energieeffizienz Dr.-Ing. Elke Mackensen NewTec GmbH System-Entwicklung und Beratung Heinrich-von-Stephan-Str. 8b 79100
Cyber-X-Systeme Robotik/KI in Automatisierungs-Anwendungen 2026
 Cyber-X-Systeme Robotik/KI in Automatisierungs-Anwendungen 2026 marion-abschlussmeilenstein bei CLAAS Prof. Dr. Joachim Hertzberg - DFKI Cyber-X-Systeme marion-abschlussmeilenstein 19.09.2013 Prof. Dr.
Cyber-X-Systeme Robotik/KI in Automatisierungs-Anwendungen 2026 marion-abschlussmeilenstein bei CLAAS Prof. Dr. Joachim Hertzberg - DFKI Cyber-X-Systeme marion-abschlussmeilenstein 19.09.2013 Prof. Dr.
IKT.NRW Leitmarktwettbewerb 1. Runde
 IKT.NRW Leitmarktwettbewerb 1. Runde Juni/Juli 2015 1 IKT NRW Bedeutung des OP EFRE NRW für die Wirtschafts- und Strukturpolitik in NRW Das EFRE-Programm ist das mit Abstand größte Programm zur Förderung
IKT.NRW Leitmarktwettbewerb 1. Runde Juni/Juli 2015 1 IKT NRW Bedeutung des OP EFRE NRW für die Wirtschafts- und Strukturpolitik in NRW Das EFRE-Programm ist das mit Abstand größte Programm zur Förderung
FABRIKAUTOMATION EFFIZIENZ UND PRÄZISION SPALT- UND BÜNDIGKEITSMESSUNG
 FABRIKAUTOMATION EFFIZIENZ UND PRÄZISION SPALT- UND BÜNDIGKEITSMESSUNG KOMBINIERT MIT OBERFLÄCHENINSPEKTION Spalt-/ Bündigkeitsmessung Innovativ, flexibel & präzise In der Automobilproduktion spielen definierte
FABRIKAUTOMATION EFFIZIENZ UND PRÄZISION SPALT- UND BÜNDIGKEITSMESSUNG KOMBINIERT MIT OBERFLÄCHENINSPEKTION Spalt-/ Bündigkeitsmessung Innovativ, flexibel & präzise In der Automobilproduktion spielen definierte
Intelligente Automaten eröffnen neue Perspektiven für die produzierende Wirtschaft
 Intelligente Automaten eröffnen neue Perspektiven für die produzierende Wirtschaft Dr. Michael Wenzel Reis Robotics Status der Automation in der Produktion: Märkte, Applikationen Perspektiven durch neue
Intelligente Automaten eröffnen neue Perspektiven für die produzierende Wirtschaft Dr. Michael Wenzel Reis Robotics Status der Automation in der Produktion: Märkte, Applikationen Perspektiven durch neue
Verbundprojekt. AKIT Autonomie-Kit für seriennahe Arbeitsfahrzeuge zur vernetzten und assistierten Bergung von Gefahrenquellen
 Verbundprojekt AKIT Autonomie-Kit für seriennahe Arbeitsfahrzeuge zur vernetzten und assistierten Bergung von Gefahrenquellen Zivile Sicherheit Innovative Rettungs- und Sicherheitssysteme im Rahmen des
Verbundprojekt AKIT Autonomie-Kit für seriennahe Arbeitsfahrzeuge zur vernetzten und assistierten Bergung von Gefahrenquellen Zivile Sicherheit Innovative Rettungs- und Sicherheitssysteme im Rahmen des
Hohe Präzision bei kurzen Prüfzeiten und das Inline.
 Hohe Präzision bei kurzen Prüfzeiten und das Inline. 1/100 Genauigkeit Inlinefähig ohne Beeinflussung der Taktfrequenz Wunschdatenformat Datenlieferung nach Wunsch des Kunden Jede Branche Automotive, Kunststoff-,
Hohe Präzision bei kurzen Prüfzeiten und das Inline. 1/100 Genauigkeit Inlinefähig ohne Beeinflussung der Taktfrequenz Wunschdatenformat Datenlieferung nach Wunsch des Kunden Jede Branche Automotive, Kunststoff-,
Anwendungsfelder von Robotern in der Produktion
 Anwendungsfelder von Robotern in der Produktion Prof. Dr.-Ing. Prof. e. h. Wilhelm Bauer Fraunhofer-Institut für Arbeitswirtschaft und Organisation IAO, Stuttgart Institut für Arbeitswissenschaft und Technologiemanagement
Anwendungsfelder von Robotern in der Produktion Prof. Dr.-Ing. Prof. e. h. Wilhelm Bauer Fraunhofer-Institut für Arbeitswirtschaft und Organisation IAO, Stuttgart Institut für Arbeitswissenschaft und Technologiemanagement
Beam Shaping Excellence
 Beam Shaping Excellence 300 Patente 200 Mitarbeiter 13 Länder 2 Jedes Photon, zu jeder Zeit, am richtigen Ort. LIMO: World of Beam Shaping Ob zur Materialbearbeitung, Beleuchtung oder Messtechnik Licht-
Beam Shaping Excellence 300 Patente 200 Mitarbeiter 13 Länder 2 Jedes Photon, zu jeder Zeit, am richtigen Ort. LIMO: World of Beam Shaping Ob zur Materialbearbeitung, Beleuchtung oder Messtechnik Licht-
Teams Hier 1 wachsen Startups und junge Unternehmen
 Hier 1 wachsen Startups und junge Unternehmen b.fab GmbH Spin-Off des MPI Golm/Potsdam Gegründet 22.02.2018 Patentierte Technologie zur Formiat Bioökonomie Erfahrenes Gründerteam mit nationalem und internationalem
Hier 1 wachsen Startups und junge Unternehmen b.fab GmbH Spin-Off des MPI Golm/Potsdam Gegründet 22.02.2018 Patentierte Technologie zur Formiat Bioökonomie Erfahrenes Gründerteam mit nationalem und internationalem
Service-Robotik Herausforderungen und Trends. Prof. Dr. Frank Kirchner Universität Bremen, DFKI Robotik Labor Bremen Robert-Hooke-Str.
 Service-Robotik Herausforderungen und Trends Prof. Dr. Frank Kirchner Universität Bremen, DFKI Robotik Labor Bremen Robert-Hooke-Str. 5 28359 Bremen , Bremen Grundlagen zur Anwendung bringen Direkte Einbindung
Service-Robotik Herausforderungen und Trends Prof. Dr. Frank Kirchner Universität Bremen, DFKI Robotik Labor Bremen Robert-Hooke-Str. 5 28359 Bremen , Bremen Grundlagen zur Anwendung bringen Direkte Einbindung
Einsatz von Bildverarbeitung für Inspektionsroboter am Beispiel des Sielroboters. Auftraggeber/Kooperation: JENOPTIK Sielmetric GmbH
 Einsatz von Bildverarbeitung für Inspektionsroboter am Beispiel des Sielroboters Auftraggeber/Kooperation: JENOPTIK Sielmetric GmbH Entwicklungsaufgaben: 4 Design der Sensor-Kamera-Einheit des Roboters
Einsatz von Bildverarbeitung für Inspektionsroboter am Beispiel des Sielroboters Auftraggeber/Kooperation: JENOPTIK Sielmetric GmbH Entwicklungsaufgaben: 4 Design der Sensor-Kamera-Einheit des Roboters
F R A U N H O F E R - I n s T I T U T f ü r P r o d u k T I O N s t e c H N O l o g i e I P T. Automatisierte Feinbearbeitung
 F R A U N H O F E R - I n s T I T U T f ü r P r o d u k T I O N s t e c H N O l o g i e I P T Automatisierte Feinbearbeitung Automatisierte Feinbearbeitung im Werkzeug- und Formenbau Das Fraunhofer IPT
F R A U N H O F E R - I n s T I T U T f ü r P r o d u k T I O N s t e c H N O l o g i e I P T Automatisierte Feinbearbeitung Automatisierte Feinbearbeitung im Werkzeug- und Formenbau Das Fraunhofer IPT
Automatisierungstechnik. - Quo vadis?
 Universität Stuttgart Institut für Automatisierungs- und Softwaretechnik Prof. Dr.-Ing. Dr. h. c. P. Göhner Automatisierungstechnik - Quo vadis? Prof. Dr.-Ing. Dr. h. c. Peter Göhner anlässlich des Fest-Kolloquiums
Universität Stuttgart Institut für Automatisierungs- und Softwaretechnik Prof. Dr.-Ing. Dr. h. c. P. Göhner Automatisierungstechnik - Quo vadis? Prof. Dr.-Ing. Dr. h. c. Peter Göhner anlässlich des Fest-Kolloquiums
Rheinberg, //
 Die neue EU-Förderperiode 2014 bis 2020 Chancen für kleine und mittlere Unternehmen - Operationelles Programm NRW 2014-2020 für den Europäischen Fonds für Regionale Entwicklung Rheinberg, 25.11.2014 Förderstruktur
Die neue EU-Förderperiode 2014 bis 2020 Chancen für kleine und mittlere Unternehmen - Operationelles Programm NRW 2014-2020 für den Europäischen Fonds für Regionale Entwicklung Rheinberg, 25.11.2014 Förderstruktur
Bachelorarbeit: Programmable Matter
 Bachelorarbeit: Programmable Matter ProgrammableMatter bzw. programmierbare Strukturen können nach ihrem Aufbau ihre Gestalt noch beliebig verändern. Der entwickelte modulare Roboter ARDS ist, durch seine
Bachelorarbeit: Programmable Matter ProgrammableMatter bzw. programmierbare Strukturen können nach ihrem Aufbau ihre Gestalt noch beliebig verändern. Der entwickelte modulare Roboter ARDS ist, durch seine
Perfektion für spiegelnde Oberflächen. Effiziente 3D-Inspektion
 Perfektion für spiegelnde Oberflächen Effiziente 3D-Inspektion Qualität sichern Effizienz steigern 3D-Technologie führt zu fehlerfreien, spiegelnden und reflektierenden Oberflächen Spiegelnde Oberflächen
Perfektion für spiegelnde Oberflächen Effiziente 3D-Inspektion Qualität sichern Effizienz steigern 3D-Technologie führt zu fehlerfreien, spiegelnden und reflektierenden Oberflächen Spiegelnde Oberflächen
Wie Industrie 4.0 unser Leben umkrempelt Eine Einführung in die Begriffswelt
 Wie Industrie 4.0 unser Leben umkrempelt Eine Einführung in die Begriffswelt Prof. Dr. Jürg Luthiger Fachhochschule Nordwestschweiz Hochschule für Technik Institut für Mobile und Verteilte Systeme Zu meiner
Wie Industrie 4.0 unser Leben umkrempelt Eine Einführung in die Begriffswelt Prof. Dr. Jürg Luthiger Fachhochschule Nordwestschweiz Hochschule für Technik Institut für Mobile und Verteilte Systeme Zu meiner
Vertiefungsrichtung Produktionstechnik
 Vertiefungsrichtung Produktionstechnik Prof. Dr.-Ing. habil. Volker Schulze Karlsruhe, wbk Institut für Produktionstechnik KIT Die Forschungsuniversität in der Helmholtz-Gemeinschaft www.wbk.kit.edu Die
Vertiefungsrichtung Produktionstechnik Prof. Dr.-Ing. habil. Volker Schulze Karlsruhe, wbk Institut für Produktionstechnik KIT Die Forschungsuniversität in der Helmholtz-Gemeinschaft www.wbk.kit.edu Die
Präsentation der Diplomarbeit. Untersuchung und Entwicklung von Konzepten für eigensichere Sensorsysteme
 Präsentation der Diplomarbeit Technische Universität Dresden Fakultät Elektrotechnik und Informationstechnik Fraunhofer Institut Institut für mikroelektronische Schaltungen und Systeme Untersuchung und
Präsentation der Diplomarbeit Technische Universität Dresden Fakultät Elektrotechnik und Informationstechnik Fraunhofer Institut Institut für mikroelektronische Schaltungen und Systeme Untersuchung und
BBZ Industrie 4.0 Herausforderungen für die Bildung
 BBZ Industrie 4.0 Herausforderungen für die Bildung Frühjahrstreffen des Arbeitskreises SCHULEWIRTSCHAFT 04.04.2011 Flexibilisierung und individuelle Produkte Flexibilisierung der Anlagen und Menschen
BBZ Industrie 4.0 Herausforderungen für die Bildung Frühjahrstreffen des Arbeitskreises SCHULEWIRTSCHAFT 04.04.2011 Flexibilisierung und individuelle Produkte Flexibilisierung der Anlagen und Menschen
innovationcity roll out
 innovationcity roll out DORTMUND WESTERFILDE/ BODELSCHWINGH N 51 32.6 E 7 22.5 Innovationcity ROLL OUT Dortmund Inhalt 02-03 impressum InnovationCity Roll Out vorstellung & Übersicht 04-05 Das Quartier:
innovationcity roll out DORTMUND WESTERFILDE/ BODELSCHWINGH N 51 32.6 E 7 22.5 Innovationcity ROLL OUT Dortmund Inhalt 02-03 impressum InnovationCity Roll Out vorstellung & Übersicht 04-05 Das Quartier:
PRÄZISIONSTECHNIK FÜR INDUSTRIE UND HANDWERK
 PRÄZISIONSTECHNIK FÜR INDUSTRIE UND HANDWERK 2 PROFITIEREN SIE VON UNSERER ERFAHRUNG HOCHPRÄZISE QUALITÄTSPRODUKTE VON SCHICK 100 % made in Germany Als Spezialist für Motorspindeln, Präzisionsgeräte und
PRÄZISIONSTECHNIK FÜR INDUSTRIE UND HANDWERK 2 PROFITIEREN SIE VON UNSERER ERFAHRUNG HOCHPRÄZISE QUALITÄTSPRODUKTE VON SCHICK 100 % made in Germany Als Spezialist für Motorspindeln, Präzisionsgeräte und
EINE UMFASSENDE UND FLEXIBLE ZUFUHRLÖSUNG
 AnyFeeder EINE UMFASSENDE UND FLEXIBLE ZUFUHRLÖSUNG 3 Schnellere Einrichtung, verzögerungsfreie Produktwechsel Mit seiner intelligenten Software und den voll integrierten Komponenten, hilft Ihnen der Omron
AnyFeeder EINE UMFASSENDE UND FLEXIBLE ZUFUHRLÖSUNG 3 Schnellere Einrichtung, verzögerungsfreie Produktwechsel Mit seiner intelligenten Software und den voll integrierten Komponenten, hilft Ihnen der Omron
Schnittstellenstandardisierung für Industrieroboter und komplexe Sensoren
 Schnittstellenstandardisierung für Industrieroboter und komplexe Sensoren Richard Middelmann (Fa. VITRONIC, Wiesbaden) Industrial VISION-Days Stuttgart 8. November 2005 Einleitung 1 Anbindung von Sensoren
Schnittstellenstandardisierung für Industrieroboter und komplexe Sensoren Richard Middelmann (Fa. VITRONIC, Wiesbaden) Industrial VISION-Days Stuttgart 8. November 2005 Einleitung 1 Anbindung von Sensoren
kepler robotik unser Weg
 kepler robotik unser Weg Burgenländischer IT-Tag 2017 Robotik für alle Bundesrealgymnasium Keplerstraße Graz kepler robotik unser Weg Matura Wettbewerbe Kurse 1. 5. Klasse 3D Druck Platinenherstellung
kepler robotik unser Weg Burgenländischer IT-Tag 2017 Robotik für alle Bundesrealgymnasium Keplerstraße Graz kepler robotik unser Weg Matura Wettbewerbe Kurse 1. 5. Klasse 3D Druck Platinenherstellung
Schwerpunkt Mechatronik (SP 31)
") Schwerpunkt Mechatronik (SP 31) Koordinator: Veit Hagenmeyer KARLSRUHER INSTITUT FÜR TECHNOLOGIE (KIT) KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft
Schwerpunkt Mechatronik (SP 31) Koordinator: Veit Hagenmeyer KARLSRUHER INSTITUT FÜR TECHNOLOGIE (KIT) KIT Universität des Landes Baden-Württemberg und nationales Forschungszentrum in der Helmholtz-Gemeinschaft
Produktionstechnik und automatisierte Produktion
 Fakultät Maschinenwesen, Institut für Fertigungstechnik Lehrveranstaltungen zum Nebenfach im Diplomstudiengang Informatik Produktionstechnik und automatisierte Produktion Prof. Dr.-Ing. habil. U. Füssel
Fakultät Maschinenwesen, Institut für Fertigungstechnik Lehrveranstaltungen zum Nebenfach im Diplomstudiengang Informatik Produktionstechnik und automatisierte Produktion Prof. Dr.-Ing. habil. U. Füssel
Wir finden immer neue Wege, mehr für Sie herauszuholen. Sie. Chancen eröffnen. wollen nicht alles anders machen. Aber vieles besser.
 Sie wollen nicht alles anders machen. Aber vieles besser. Chancen eröffnen Wir finden immer neue Wege, mehr für Sie herauszuholen. MAPAL BIETET ALS TECHNOLOGIEPARTNER LÖSUNGEN RUND UM DIE ZERSPANUNG Wir
Sie wollen nicht alles anders machen. Aber vieles besser. Chancen eröffnen Wir finden immer neue Wege, mehr für Sie herauszuholen. MAPAL BIETET ALS TECHNOLOGIEPARTNER LÖSUNGEN RUND UM DIE ZERSPANUNG Wir
MobilitätLogistik.NRW Leitmarktwettbewerb 1. Runde
 MobilitätLogistik.NRW Leitmarktwettbewerb 1. Runde 1 Bedeutung des OP EFRE NRW für die Wirtschafts- und Strukturpolitik in NRW Das EFRE-Programm ist das mit Abstand größte Programm zur Förderung von Wirtschaft
MobilitätLogistik.NRW Leitmarktwettbewerb 1. Runde 1 Bedeutung des OP EFRE NRW für die Wirtschafts- und Strukturpolitik in NRW Das EFRE-Programm ist das mit Abstand größte Programm zur Förderung von Wirtschaft
Sonnenschutzvorrichtung
 Version 1.0 Stand: 25.04.2005 Diplomarbeit Sonnenschutzvorrichtung Diplomarbeitsgruppe: Hannes Gastl Thomas Hauser Frank Hollaus Betreuungslehrer: DI Benedikt Frischmann DI Johannes Rief Gastl, Hauser
Version 1.0 Stand: 25.04.2005 Diplomarbeit Sonnenschutzvorrichtung Diplomarbeitsgruppe: Hannes Gastl Thomas Hauser Frank Hollaus Betreuungslehrer: DI Benedikt Frischmann DI Johannes Rief Gastl, Hauser
Komponente / Gerätemontage
 Komponente / Gerätemontage Entwicklung Ausarbeitung des Pflichtenhefts Konzept-, Vorentwicklungs- und Planungsphase Hard- Software Entwicklung Elektronische Geräte und Systeme Sie möchten Ihre Ideen professionell
Komponente / Gerätemontage Entwicklung Ausarbeitung des Pflichtenhefts Konzept-, Vorentwicklungs- und Planungsphase Hard- Software Entwicklung Elektronische Geräte und Systeme Sie möchten Ihre Ideen professionell
COMPOSITE CUTTING RESONANTE ULTRASCHALLSYSTEME ZUM EFFIZIENTEN ZERSPANEN, SCHNEIDEN UND SÄGEN VON LEICHTBAUWERKSTOFFEN WEBER-ULTRASONICS.
 COMPOSITE CUTTING RESONANTE ULTRASCHALLSYSTEME ZUM EFFIZIENTEN ZERSPANEN, SCHNEIDEN UND SÄGEN VON LEICHTBAUWERKSTOFFEN WEBER-ULTRASONICS.COM HÖHERE PRODUKTIVITÄT, FLEXIBILITÄT UND EFFIZIENZ RESONANTE WERKZEUGSYSTEME
COMPOSITE CUTTING RESONANTE ULTRASCHALLSYSTEME ZUM EFFIZIENTEN ZERSPANEN, SCHNEIDEN UND SÄGEN VON LEICHTBAUWERKSTOFFEN WEBER-ULTRASONICS.COM HÖHERE PRODUKTIVITÄT, FLEXIBILITÄT UND EFFIZIENZ RESONANTE WERKZEUGSYSTEME
STARK IN ENGINEERING UND PRODUKTION
 STARK IN ENGINEERING UND PRODUKTION So erreichen Sie uns: HAKAMA AG Hauptstrasse 50 4112 Bättwil Schweiz Tel. +41 61 735 45 45 Fax +41 61 735 45 46 E-Mail: info@hakama.ch www.hakama.ch ERSTAUNLICHES AUS
STARK IN ENGINEERING UND PRODUKTION So erreichen Sie uns: HAKAMA AG Hauptstrasse 50 4112 Bättwil Schweiz Tel. +41 61 735 45 45 Fax +41 61 735 45 46 E-Mail: info@hakama.ch www.hakama.ch ERSTAUNLICHES AUS
Regionale Ausschreibung Digitalisierung
 Regionale Ausschreibung Digitalisierung WS Forschung Austria Alpbach 24.8.2017 DI Klaus Oberreiter, MBA 1 Ausgangssituation Digitalisierung ist ein wesentlicher Faktor für OÖs Zukunftsfähigkeit. OÖ ist
Regionale Ausschreibung Digitalisierung WS Forschung Austria Alpbach 24.8.2017 DI Klaus Oberreiter, MBA 1 Ausgangssituation Digitalisierung ist ein wesentlicher Faktor für OÖs Zukunftsfähigkeit. OÖ ist
Regionale Innovationsnetzwerke in Deutschland - Allgemeine Grundlagen sowie praktische Beispiele aus Nordrhein-Westfalen
 Regionale Innovationsnetzwerke in Deutschland - Allgemeine Grundlagen sowie praktische Beispiele aus Nordrhein-Westfalen Prof. Dr. Petra Moog - Universität Siegen Sebastian Hanny - Technische Universität
Regionale Innovationsnetzwerke in Deutschland - Allgemeine Grundlagen sowie praktische Beispiele aus Nordrhein-Westfalen Prof. Dr. Petra Moog - Universität Siegen Sebastian Hanny - Technische Universität
Information zum B.Sc. Studienschwerpunkt Automatisierung und Systemdynamik
 Information zum B.Sc. Studienschwerpunkt Automatisierung und Systemdynamik Univ.-Prof. Dr.-Ing. Andreas Kroll (FG Mess- & Regelungstechnik) Univ.-Prof. Dr.-Ing. Ludger Schmidt (FG Mensch-Maschine-Systemtechnik)
Information zum B.Sc. Studienschwerpunkt Automatisierung und Systemdynamik Univ.-Prof. Dr.-Ing. Andreas Kroll (FG Mess- & Regelungstechnik) Univ.-Prof. Dr.-Ing. Ludger Schmidt (FG Mensch-Maschine-Systemtechnik)
Neues in NX 12 für die Fertigung
 Neues in NX 12 für die Fertigung Die Neuerungen in Kürze Realize innovation. Werkzeug- und Formenbau mit NX CAM Hochwertige Formen 60% schneller Page 2 Werkzeug- und Formenbau Adaptives Fräsen Neue High-Speed
Neues in NX 12 für die Fertigung Die Neuerungen in Kürze Realize innovation. Werkzeug- und Formenbau mit NX CAM Hochwertige Formen 60% schneller Page 2 Werkzeug- und Formenbau Adaptives Fräsen Neue High-Speed
Polte, Galina; Rennert, Klaus-Jürgen; Linß, Gerhard: Korrektur von Abbildungsfehlern für optische Messverfahren
 Polte, Galina; Rennert, Klaus-Jürgen; Linß, Gerhard: Korrektur von Abbildungsfehlern für optische Messverfahren Publikation entstand im Rahmen der Veranstaltung: Workshop "Flexible Montage", Ilmenau, 09.
Polte, Galina; Rennert, Klaus-Jürgen; Linß, Gerhard: Korrektur von Abbildungsfehlern für optische Messverfahren Publikation entstand im Rahmen der Veranstaltung: Workshop "Flexible Montage", Ilmenau, 09.
T Qualität auf ermin
 Qualität auftermin Die MDP Meili AG in Ramsen eine führende Firma im Bereich mechanischer Fertigungstechnik Mit modernster Technologie, einer grossen Fertigungstiefe, einem leistungsfähigen Maschinenpark
Qualität auftermin Die MDP Meili AG in Ramsen eine führende Firma im Bereich mechanischer Fertigungstechnik Mit modernster Technologie, einer grossen Fertigungstiefe, einem leistungsfähigen Maschinenpark
Anwendungsplattform Intelligente Mobilität (AIM)
") Anwendungsplattform Intelligente Mobilität (AIM) Eine ganze Stadt wird zum Verkehrs-Labor www.europa-fuer-niedersachsen.de Das Projekt AIM wurde vom Europäischen Fonds für regionale Entwicklung mit 5,25
Anwendungsplattform Intelligente Mobilität (AIM) Eine ganze Stadt wird zum Verkehrs-Labor www.europa-fuer-niedersachsen.de Das Projekt AIM wurde vom Europäischen Fonds für regionale Entwicklung mit 5,25
Elektronisches Formular für individuelle Zahlungen Eine Praxis der Anstalt für soziale Sicherheit und Sozialdienste für Staatsbedienstete
 Gute Praxis in der sozialen Sicherheit Gute Praxis umgesetzt ab: 2013 Elektronisches Formular für individuelle Zahlungen Eine Praxis der Anstalt für soziale Sicherheit und Sozialdienste für Staatsbedienstete
Gute Praxis in der sozialen Sicherheit Gute Praxis umgesetzt ab: 2013 Elektronisches Formular für individuelle Zahlungen Eine Praxis der Anstalt für soziale Sicherheit und Sozialdienste für Staatsbedienstete
Session: 8 itsowl-tt-scyro Schweißen von Mischwellen mittels hybridkinematischer Roboter 06. Juli 2016 Bielefeld.
 Session: 8 itsowl-tt-scyro Schweißen von Mischwellen mittels hybridkinematischer Roboter 06. Juli 2016 Bielefeld www.its-owl.de Agenda Abschlusspräsentation Einführung Zielsetzung Ergebnisse Resümee und
Session: 8 itsowl-tt-scyro Schweißen von Mischwellen mittels hybridkinematischer Roboter 06. Juli 2016 Bielefeld www.its-owl.de Agenda Abschlusspräsentation Einführung Zielsetzung Ergebnisse Resümee und
Präsentation der VIA Laser und Systemtechnik GmbH + Co. KG
 räsentation der VIA Laser und Systemtechnik GmbH + Co. KG Vorstellung der VIA Suhl Die VIA Laser & Systemtechnik GmbH & Co. KG wurde im Frühjahr 1998 gegründet. Ziel war der Aufbau einer Blechfertigung
räsentation der VIA Laser und Systemtechnik GmbH + Co. KG Vorstellung der VIA Suhl Die VIA Laser & Systemtechnik GmbH & Co. KG wurde im Frühjahr 1998 gegründet. Ziel war der Aufbau einer Blechfertigung
Anwendung von VR/AR im Bereich Mensch-Roboter-Kollaboration
 Anwendung von VR/AR im Bereich Mensch-Roboter-Kollaboration 1. VR/AR in der Robotik 2. Mensch-Roboter-Kollaboration in der Montage Einsatz von Robotern bei KUKA 3. Schulung von Mitarbeitern für MRK 4.
Anwendung von VR/AR im Bereich Mensch-Roboter-Kollaboration 1. VR/AR in der Robotik 2. Mensch-Roboter-Kollaboration in der Montage Einsatz von Robotern bei KUKA 3. Schulung von Mitarbeitern für MRK 4.
Industrie 4.0. Geschäftsmodelle 26.02.2016. Ihr Technologie- Dienstleister. Karl-Heinz Flamm Produktmanagement Industrietechnik
 Industrie 4.0 Geschäftsmodelle Ihr Technologie- Dienstleister Karl-Heinz Flamm Produktmanagement Industrietechnik Alexander Bürkle GmbH & Co. KG Technischer Dienstleister [ Konstruktion [ Applikationen
Industrie 4.0 Geschäftsmodelle Ihr Technologie- Dienstleister Karl-Heinz Flamm Produktmanagement Industrietechnik Alexander Bürkle GmbH & Co. KG Technischer Dienstleister [ Konstruktion [ Applikationen
1. Die digitale Transformation in Unternehmen. 2. Die Trends in der Fertigungsmesstechnik
 Herausforderungen in der Messtechnik durch die Digitalisierung Die Zukunft der Fertigungsmesstechnik Fachforum am TC Cham, 19.10.2016 1 1. Die digitale Transformation in Unternehmen 2. Die Trends in der
Herausforderungen in der Messtechnik durch die Digitalisierung Die Zukunft der Fertigungsmesstechnik Fachforum am TC Cham, 19.10.2016 1 1. Die digitale Transformation in Unternehmen 2. Die Trends in der
Horizont Bezüge zu Forschung und Innovation im Bereich Kultur. Anika Werk EU-Büro des BMBF ,
 Horizont 2020 - Bezüge zu Forschung und Innovation im Bereich Kultur Anika Werk EU-Büro des BMBF 030 67055-738, anika.werk@dlr.de Inhalt 1. Was ist Horizont 2020? 2. Wo sind Anknüpfungspunkte für Forschung
Horizont 2020 - Bezüge zu Forschung und Innovation im Bereich Kultur Anika Werk EU-Büro des BMBF 030 67055-738, anika.werk@dlr.de Inhalt 1. Was ist Horizont 2020? 2. Wo sind Anknüpfungspunkte für Forschung
3D MESSTECHNIK ENGINEERING BERATUNG
 3D MESSTECHNIK ENGINEERING BERATUNG BERATUNG WIR ANALYSIEREN, BEWERTEN UND OPTIMIEREN GESCHÄFTSPROZESSE ANALYSE BEWERTUNG ERFOLG OPTIMIERUNG Unsere Beratungstätigkeiten als Generalisten bieten wir im Bereich
3D MESSTECHNIK ENGINEERING BERATUNG BERATUNG WIR ANALYSIEREN, BEWERTEN UND OPTIMIEREN GESCHÄFTSPROZESSE ANALYSE BEWERTUNG ERFOLG OPTIMIERUNG Unsere Beratungstätigkeiten als Generalisten bieten wir im Bereich
Intuitive Industrieroboterprogrammierung Kurzfassung. Intuitive Programming of Industrial Robots Abstract
 Fraunhofer-Institut für Produktionstechnik und Automatisierung, IPA Dipl.-Systemwiss. Christian Meyer Dipl.-Ing. Timo Schäfer Intuitive Industrieroboterprogrammierung Kurzfassung Die Programmierung von
Fraunhofer-Institut für Produktionstechnik und Automatisierung, IPA Dipl.-Systemwiss. Christian Meyer Dipl.-Ing. Timo Schäfer Intuitive Industrieroboterprogrammierung Kurzfassung Die Programmierung von
Schnelle Konsolidierung und Dekonsolidierung von Seecontainern mittels Robotik und dynamischer Beladungsplanung
 RoboCon Berlin, 09. / 10. Dezember 2010 Schnelle Konsolidierung und Dekonsolidierung von Seecontainern mittels Robotik und dynamischer Beladungsplanung Projektpartner BLG LOGISTICS GROUP AG & Co. KG BLG
RoboCon Berlin, 09. / 10. Dezember 2010 Schnelle Konsolidierung und Dekonsolidierung von Seecontainern mittels Robotik und dynamischer Beladungsplanung Projektpartner BLG LOGISTICS GROUP AG & Co. KG BLG
Neue Technologien für die sichere Mensch- Roboter-Interaktion. Geschäftsfeld Robotersysteme
 Geschäftsfeld Robotersysteme 1 Aktuelle Arbeitsfelder im Geschäftsfeld Robotersysteme Serviceroboter für Inspektion, Reinigung und Wartung Mobile Assistenzrobotik Robotik- und Handhabungstechnik für Industrie
Geschäftsfeld Robotersysteme 1 Aktuelle Arbeitsfelder im Geschäftsfeld Robotersysteme Serviceroboter für Inspektion, Reinigung und Wartung Mobile Assistenzrobotik Robotik- und Handhabungstechnik für Industrie
INDUsniff MESSMOLCH PIPE SYSTEM MONITORING. INDUsniff PIPE SYSTEM MONITORING
 INDUsniff MESSMOLCH PIPE SYSTEM MONITORING INDUsniff PIPE SYSTEM MONITORING Pharma Lebensmittel Kosmetik Biotech Chemie Wasserwirtschaft INDUsniff Perfekt für das industrielle fluide Umfeld Medienführende
INDUsniff MESSMOLCH PIPE SYSTEM MONITORING INDUsniff PIPE SYSTEM MONITORING Pharma Lebensmittel Kosmetik Biotech Chemie Wasserwirtschaft INDUsniff Perfekt für das industrielle fluide Umfeld Medienführende
AUSGANGSLAGE. Carbon Factory baut auf dem erfolgreichen Vorgängerprojekt. innovative CLF (continuous lattice fabrication) Verfahren,
 Verfahren,") EINFÜHRUNG Mit dem rasant wachsenden Markt für Additive Fertigung und der für die Industrie zunehmenden Bedeutung von faserverstärkten Kunststoffen (FVK) vereint unser Projekt zwei aktuelle Forschungs-
EINFÜHRUNG Mit dem rasant wachsenden Markt für Additive Fertigung und der für die Industrie zunehmenden Bedeutung von faserverstärkten Kunststoffen (FVK) vereint unser Projekt zwei aktuelle Forschungs-
SKELETT-SYSTEM FÜR TÜREN
 SKELETT-SYSTEM FÜR TÜREN DBGM DE20 2014 101 484.5 SKELETT- SYSTEM FÜR TÜREN INNOVATIVE WELTNEUHEIT WISKIN ist dem Besonderen und Innovativen verpflichtet. Als Entwickler des Skelett-Systems bieten wir
SKELETT-SYSTEM FÜR TÜREN DBGM DE20 2014 101 484.5 SKELETT- SYSTEM FÜR TÜREN INNOVATIVE WELTNEUHEIT WISKIN ist dem Besonderen und Innovativen verpflichtet. Als Entwickler des Skelett-Systems bieten wir
MESSTECHNIK ROBOTERGEFÜHRTE OPTISCHE CMM-3D-SCANNER FÜR AUTOMATISIERTE PRÜFUNGEN
 MESSTECHNIK ROBOTERGEFÜHRTE OPTISCHE CMM-3D-SCANNER FÜR AUTOMATISIERTE PRÜFUNGEN Beschleunigen Sie Ihre industriellen Prüfverfahren, indem die Qualitätskontrolle so nah am Teil wie nur möglich durchgeführt
MESSTECHNIK ROBOTERGEFÜHRTE OPTISCHE CMM-3D-SCANNER FÜR AUTOMATISIERTE PRÜFUNGEN Beschleunigen Sie Ihre industriellen Prüfverfahren, indem die Qualitätskontrolle so nah am Teil wie nur möglich durchgeführt
CLIC Informationen für FFG Projektprämierung
 Closed-Loop Integration of Cognition, Communication and Control CLIC Informationen für FFG Projektprämierung am 4. März 2009 von: TTTech Computertechnik AG Schönbrunner Straße 7 1040 Wien Kontakt: Mag.
Closed-Loop Integration of Cognition, Communication and Control CLIC Informationen für FFG Projektprämierung am 4. März 2009 von: TTTech Computertechnik AG Schönbrunner Straße 7 1040 Wien Kontakt: Mag.
Blechsysteme Einrichtungssysteme Pulverbeschichtung OEM. Wir setzen Ihre Ideen um
 Blechsysteme Einrichtungssysteme Pulverbeschichtung OEM Wir setzen Ihre Ideen um «POSITIVE EINSTELLUNG UND INNOVATIVES HANDELN ERÖFFNEN NEUE PERSPEKTIVEN UND FÜHREN ZUM ERFOLG» Firmeninhaber Johann Boog
Blechsysteme Einrichtungssysteme Pulverbeschichtung OEM Wir setzen Ihre Ideen um «POSITIVE EINSTELLUNG UND INNOVATIVES HANDELN ERÖFFNEN NEUE PERSPEKTIVEN UND FÜHREN ZUM ERFOLG» Firmeninhaber Johann Boog
RoboSAX Farbeigenschaften Spielfeldplane
 RoboSAX 2019 Farbeigenschaften Spielfeldplane Die Wahrnehmungsfähigkeit eines Roboters liegt weit hinter der eines Menschen. Damit die Roboter der Teilnehmer sich trotzdem problemlos auf dem Spielfeld
RoboSAX 2019 Farbeigenschaften Spielfeldplane Die Wahrnehmungsfähigkeit eines Roboters liegt weit hinter der eines Menschen. Damit die Roboter der Teilnehmer sich trotzdem problemlos auf dem Spielfeld
roboter.de Effiziente Automatisierung mit virtueller Inbetriebnahme Automatisch erfolgreich!
 Automatisch erfolgreich! Michael Frieß Technischer Leiter, Prokurist Erhardt + Abt Automatisierungstechnik GmbH friess@ Effiziente Automatisierung mit virtueller Inbetriebnahme Seite 1 Inhalt Was ist eine
Automatisch erfolgreich! Michael Frieß Technischer Leiter, Prokurist Erhardt + Abt Automatisierungstechnik GmbH friess@ Effiziente Automatisierung mit virtueller Inbetriebnahme Seite 1 Inhalt Was ist eine
KUKA Expertenforum, Vorsprung durch Automation - Wirtschaftliche Lösungen für die Fertigung
 KUKA Expertenforum, 28.06.2013 Vorsprung durch - Wirtschaftliche Lösungen für die Fertigung 1 1999 Gründung des Unternehmens als MVP Spaichingen durch Martin Dreher 2003 Inbetriebnahme der ersten HAAS
KUKA Expertenforum, 28.06.2013 Vorsprung durch - Wirtschaftliche Lösungen für die Fertigung 1 1999 Gründung des Unternehmens als MVP Spaichingen durch Martin Dreher 2003 Inbetriebnahme der ersten HAAS
Mechatronik im Unternehmen - Eine Übersicht
 Thema: Mechatronik im Unternehmen - Eine Übersicht Dr.-Ing. Stefan Beer ABM Greiffenberger Antriebstechnik GmbH Marktredwitz 1 Gliederung: 1. Begriff Mechatronik 2. ABM Greiffenberger Antriebstechnik GmbH
Thema: Mechatronik im Unternehmen - Eine Übersicht Dr.-Ing. Stefan Beer ABM Greiffenberger Antriebstechnik GmbH Marktredwitz 1 Gliederung: 1. Begriff Mechatronik 2. ABM Greiffenberger Antriebstechnik GmbH
Schulungsangebot Robotik. GEVA Robotik
 Schulungsangebot Robotik GEVA Robotik office@geva.at 1 12.09.2018 Bediener Schulung Roboter / Bedienen Zielgruppe: Bedienpersonal Seminardauer: 1 Tag bei GEVA Inhalte (flexibel erweiterbar): o Sicherer
Schulungsangebot Robotik GEVA Robotik office@geva.at 1 12.09.2018 Bediener Schulung Roboter / Bedienen Zielgruppe: Bedienpersonal Seminardauer: 1 Tag bei GEVA Inhalte (flexibel erweiterbar): o Sicherer
Stahl verdrängt Alu bei Kolben für Dieselmotoren
 Auto-Medienportal.Net: 12.08.2014 Stahl verdrängt Alu bei Kolben für Dieselmotoren Mercedes-Benz ersetzt weltweit als erster Hersteller die in Pkw-Dieselmotoren bislang üblichen Kolben aus Aluminium durch
Auto-Medienportal.Net: 12.08.2014 Stahl verdrängt Alu bei Kolben für Dieselmotoren Mercedes-Benz ersetzt weltweit als erster Hersteller die in Pkw-Dieselmotoren bislang üblichen Kolben aus Aluminium durch
EEAS Chancen für neue Kooperationen. Berlin, 15. März 2016
 EEAS Chancen für neue Kooperationen Berlin, 15. März 2016 Agenda Zielsetzung Idee Partnerstruktur Teilprojekte Vision Umsetzung 2 15.03.2016 Zielsetzung Vernetzung von Akteuren Luft- und Raumfahrt Triebwerke,
EEAS Chancen für neue Kooperationen Berlin, 15. März 2016 Agenda Zielsetzung Idee Partnerstruktur Teilprojekte Vision Umsetzung 2 15.03.2016 Zielsetzung Vernetzung von Akteuren Luft- und Raumfahrt Triebwerke,
Teach-In für die 3D-Scan Akquise mit einem Roboter. Teach-In für die 3D-Scanakquise mit einem mobilen Roboter
 Teach-In für die 3D-Scan Akquise mit einem Roboter DoritStruckmeier, Borrmann Dorit Oldenburger 2017 Oliver Borrmann,3D-Tage Andreas Nüchter 1 Zielsetzung der Arbeit Ein mobiler Roboter fährt einen angelernten
Teach-In für die 3D-Scan Akquise mit einem Roboter DoritStruckmeier, Borrmann Dorit Oldenburger 2017 Oliver Borrmann,3D-Tage Andreas Nüchter 1 Zielsetzung der Arbeit Ein mobiler Roboter fährt einen angelernten
Fachschule für Technik Digitale Produktionstechnik
 Fachschule für Technik Digitale Produktionstechnik Der/Die TechnikerIn der Zukunft......ist fit für die Fabrik 4.0! 1 Ziele Die Fachschule für Technik, Fachrichtung Automatisierungstechnik mit dem Schwerpunkt
Fachschule für Technik Digitale Produktionstechnik Der/Die TechnikerIn der Zukunft......ist fit für die Fabrik 4.0! 1 Ziele Die Fachschule für Technik, Fachrichtung Automatisierungstechnik mit dem Schwerpunkt
Technikvergleich zwischen FTS und autonomen PKW
 Technikvergleich zwischen FTS und autonomen PKW Die Bedeutung von Automatisierung Dr.-Ing. G. Ullrich, Forum-FTS GmbH, Voerde; Kurzfassung Die Automobilindustrie entwickelt mit Hochdruck das autonome Auto.
Technikvergleich zwischen FTS und autonomen PKW Die Bedeutung von Automatisierung Dr.-Ing. G. Ullrich, Forum-FTS GmbH, Voerde; Kurzfassung Die Automobilindustrie entwickelt mit Hochdruck das autonome Auto.
Anwendungsbezogenes Tracking
 Institut für Computervisualistik Universität Koblenz 4. Juli 2011 Inhaltsverzeichnis 1 Sensorbasiertes Tracking GPS WLan Elektronischer Kompass Inertialsensoren 2 Bildbasiertes Tracking Markerbasiertes
Institut für Computervisualistik Universität Koblenz 4. Juli 2011 Inhaltsverzeichnis 1 Sensorbasiertes Tracking GPS WLan Elektronischer Kompass Inertialsensoren 2 Bildbasiertes Tracking Markerbasiertes
Informationssystemtechnik (B.Sc.)
") 1. Grundlagen der Mathematik (32 CP) o 32 8 8 8 8 04-00-0108 Mathematik I St s 90 6 o 8 04-00-0126-vu Mathematik I 6 VU 8 04-00-0109 Mathematik II St s 90 6 o 8 04-00-0079-vu Mathematik II 6 VU 8 04-00-0111
1. Grundlagen der Mathematik (32 CP) o 32 8 8 8 8 04-00-0108 Mathematik I St s 90 6 o 8 04-00-0126-vu Mathematik I 6 VU 8 04-00-0109 Mathematik II St s 90 6 o 8 04-00-0079-vu Mathematik II 6 VU 8 04-00-0111
Session 2: Projektvorstellung. 18. August 2015, Gütersloh.
 Session 2: Projektvorstellung Transferprojekt itsowl-tt-sewrap 18. August 2015, Gütersloh www.its-owl.de Agenda Abschlusspräsentation itsowl-tt-sewrap Zielsetzung Ergebnisse Resümee und Ausblick it s OWL
Session 2: Projektvorstellung Transferprojekt itsowl-tt-sewrap 18. August 2015, Gütersloh www.its-owl.de Agenda Abschlusspräsentation itsowl-tt-sewrap Zielsetzung Ergebnisse Resümee und Ausblick it s OWL