Anwendungsbezogenes Tracking
|
|
|
- Tristan Geisler
- vor 5 Jahren
- Abrufe
Transkript
1 Institut für Computervisualistik Universität Koblenz 4. Juli 2011
2 Inhaltsverzeichnis 1 Sensorbasiertes Tracking GPS WLan Elektronischer Kompass Inertialsensoren 2 Bildbasiertes Tracking Markerbasiertes Tracking Markerloses Tracking 3 Hybrid Tracking Techniken 4 Fazit

3 GPS Satellitengestütztes Navigations- und Positionsbestimmungssystem 1973 vom US-Verteidigungsministerium entwickelt 31 Satelliten, die Erde zweimal täglich umkreisen 24-Slotanordnung
4 GPS Die Satelliten senden in festen Abständen Zeitsignale sowie ihre Position aus Laufzeit dieser Signale dient als Basis für die Trilateration Genauigkeit ca. 10 Meter Ungenauigkeiten der Uhren führen zu einem Zeitdrift 4. Satellit nötig
5 GPS Verbesserung der Genauigkeit durch: Differential GPS Assisted GPS Vorteile: Weltweit verfügbar Im Freien ausreichend genau Günstige Empfänger Nachteile: Nur im Freien verfügbar Indoor nur sehr ungenaue A-GPS Positionsbestimmung Keine Bestimmung der Orientierung
6 WLan Signalstärke und Laufzeit zwischen Accespoint und Empfänger zur Entfernungsmessung Drei Accespoints für 2D Positionsbestimmung, Vier für 3D Positionsbestimmung mittels Trilateration Genauigkeit von wenigen Metern
7 WLan Vorteile: Anwendbarkeit innerhalb von Gebäuden Günstige, in vielen Bereichen bereits vorhandene Hardware Nachteile: Karte mit Accespointpositionen wird benötigt Keine Bestimmung der Orientierung möglich
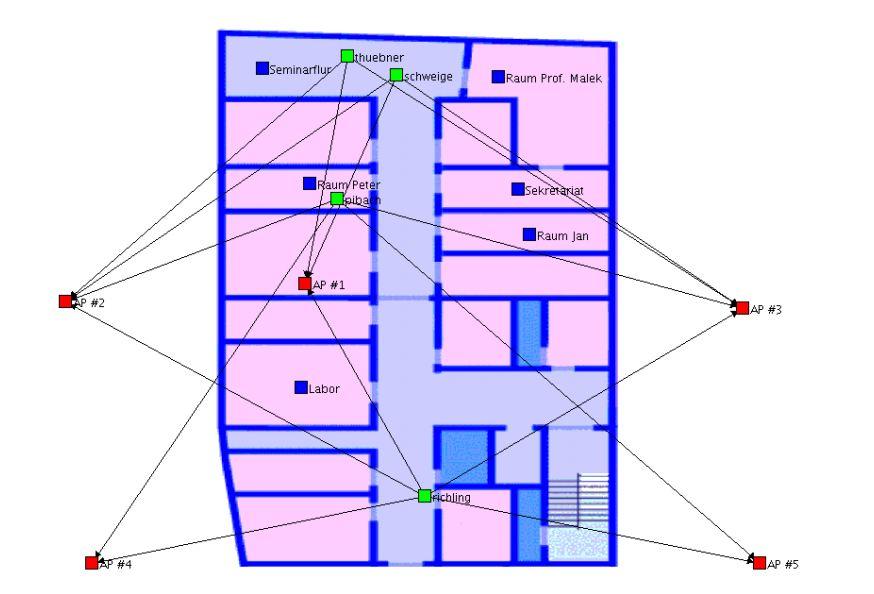
8 WLan
9 Elektronischer Kompass Horizontale Orientationsbestimmung mithilfe des Erdmagnetfeldes Schock- und Vibrationsresistent Störungen in der Nähe von eisenhaltingen Metallen Arbeitet autonom
10 Inertialsensoren Es gibt mehrere verschiedene Arten von Inertialsensoren jedoch arbeiten alle auf dem gleichen Prinzip, der Trägheit der Masse. Arbeiten autonom Nur relative Positionsbestimmung dies führt zu einem Drift Quadratische Fehlerakkumulation Stützsystem für initiale Position sowie Driftkorrektur nötig
11 Inertialsensoren Beschleunigungsmesser 1 Masse an Feder 2 Stauchung bzw. Streckung der Feder wird gemessen 3 Mittels zweifacher Integration wird daraus die Positionsänderung bestimmt
12 Inertialsensoren Beschleunigungsmesser Ein Freiheitsgrad pro Sensor Günstig und kompakt realisierbar Mit Hilfe der Gravitation ist es möglich die Orientierung zu bestimmen

13 Inertialsensoren Piezoelektrischer Sensor 1 Besteht aus Piezoelement und Gewichte 2 Die Piezoelemente erzeugen beim Einwirken von Kräften eine elektrische Ladung 3 Diese Ladung wird mithilfe von Elektroden erfasst 4 Da die Ladung proportional zu den einwirkenden Kräfte ist, kann daraus die Kraft und somit die Beschleunigung, welche für die Positionsbestimmung nötig ist, bestimmt werden

14 Inertialsensoren Gyroskop 1 Schnell drehende Scheibe im inneren der Konstruktion 2 Bei Bewegung behält die Scheibe ihre Richtung bei 3 Messung der Winkelgeschwindigkeit ermöglicht Berechnung der absoluten Orientierung 4 weiter Gyroskoparten: Lasergyroskop, Vibrationsgyroskop...
15 Inertialsensoren Vorteile: Brauchen keine Infrastruktur Günstig Kompakt realisierbar Nachteile: Nur relative Positionsbestimmung Fehlerakkumulation

16 Markerbasiertes Tracking Arbeitet auf sog. Markern Einlesen der Marker in der Software um eine Zuordnung herzustellen Berechnung der Kamerapose mithilfe der im Bild gefundenen Markern Ist ein Marker einmal gefunden, wird versucht, diesen zu verfolgen Suchbereich einschränken

17 Markerbasiertes Tracking Markerfindung AR-Toolkit 1 Kamerabild binarisieren 2 Labelingvorgang zur Regionendetektion 3 Regionen auf Konturen untersuchen 4 Vierecke identifizieren 5 Eckpunkte bestimmen
18 Markerbasiertes Tracking Vorteile: Präzise Günstig Hohe Mobilität Sehr Robust ohne großen technischen Aufwand realisierbar Outdoor einsetzbar Nachteile: Marker auf für unbeteiligte Personensichtbar Verdeckungen führen zu schlechten Trackingergebnissen Geringer High-Tech-Faktor
19 Markerloses Tracking Benötigt keine Veränderung der Umgebung Arbeitet auf Bildmerkmalen Punkte Linien Berechnung der Kamerapose mithilfe der im Bild gefundenen Merkmalen Veränderung der Perspektive wird durch sog. Matching ausgeglichen Unterteilung in Sequentielles und Modellbasiertes Tracking sowie Rekonstruktive Ansätze

20 Markerloses Tracking Natürliche Merkmale
21 Markerloses Tracking Sequentielles Tracking Relative Positionsbestimmung aus aufeinanderfolgenden Kamerabildern Veränderungen von Merkmalen werden analysiert Da die Berechnung der Pose immer auf der vorherigen beruht summieren sich Fehler stetig auf Ausgleich durch Referenzbilder Licht und Schatten verändern Merkmale Bestimmung der Startpose benötigt Referenzpunkte oder Stützsystem
22 Markerloses Tracking Modellbasiertes Tracking Benötigt 3D Modell der Umgebung sowie initiale Startposition Virtuelles Bild wird versucht dem Kamerabild anzunähern Dies liefert die absolute Position und somit entsteht kein Drift Bewegliche Objekte wie zum Beispiel Autos, Fußgänger oder Jalousien können die Bestimmung negativ beeinflussen Zur Bestimmung der Pose werden Kamera und Synthetisches Bild auf korrespondierende Merkmale untersucht

23 Markerloses Tracking Modellbasiertes Tracking
24 Markerloses Tracking Rekonstruktive Ansätze SLAM(Simultaneous localization and mapping) Kommen komplett ohne Informationen über die Umgebung aus Bisher hauptsächlich bei Robotern und autonomen Fahrzeugen im Einsatz Gleichzeitiges Erstellen einer Karte sowie die Bestimmung der Position mithilfe der erstellten Karte Henne-Ei-Problem Lösung mit Kalman Filtering oder Particle Filtering
25 Markerloses Tracking Rekonstruktive Ansätze Video
26 Hybrid Tracking Techniken Fusion verschiedener Trackingtechniken Unterteilung in drei Kategorien: komplementäre im Wettbewerb stehende kooperative
27 Hybrid Tracking Techniken Komplementäre Hybrid Tracking Techniken Alle Einzeltechniken unabhänging voneinander Erweiterung des Funktionsumfangs durch Kombination verschiedener Techniken z.b. Kombination von GPS und Elektronischem Kompass
28 Hybrid Tracking Techniken Im Wettbewerb stehende Hybrid Tracking Techniken Mehrere Sensoren bestimmen die gleichen Beziehungen Fehlerminimierung z.b. Inertialsensoren mit Ultraschallstützung
29 Hybrid Tracking Techniken Kooperative Hybrid Tracking Techniken Sensoren versorgen sich gegenseitig mit Informationen z.b. Stabilisierung von optischem Tracking durch ein Gyroskop
30 Alle Trackingtechniken haben Schwächen Kombination nötig um genaues, zuverlässiges und ortsunabhängiges Tracking zu ermöglichen Bei Smartphones sticht hier besonders das Markerlose Tracking kombiniert mit Inertialsensoren hervor
31 Vielen Dank für die Aufmerksamkeit
Anwendungsbezogenes Tracking
 Anwendungsbezogenes Tracking Proseminar Augmented Reality in der Anwendung Institut für Computervisualistik, Universität Koblenz Prof. Dr. Stefan Müller Dipl.-Inform Martin Schumann Dipl.-Inform Dominik
Anwendungsbezogenes Tracking Proseminar Augmented Reality in der Anwendung Institut für Computervisualistik, Universität Koblenz Prof. Dr. Stefan Müller Dipl.-Inform Martin Schumann Dipl.-Inform Dominik
Improving the Accuracy of GPS
 Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Improving the Accuracy of GPS Stephan Kopf, Thomas King, Wolfgang Effelsberg Lehrstuhl für Praktische Informatik IV Universität Mannheim Gliederung Motivation ierungsfehler von GPS Steigerung der Genauigkeit
Chancen der Industrie 4.0 durch moderne Lokalisierungstechniken
 Chancen der Industrie 4.0 durch moderne Lokalisierungstechniken 3. AnalytikTag 15. November 2018 Prof. Dr. Bodo Kraft, kraft@fh-aachen.de Oliver Schmidts, M. Sc., schmidts@fh-aachen.de FH AACHEN UNIVERSITY
Chancen der Industrie 4.0 durch moderne Lokalisierungstechniken 3. AnalytikTag 15. November 2018 Prof. Dr. Bodo Kraft, kraft@fh-aachen.de Oliver Schmidts, M. Sc., schmidts@fh-aachen.de FH AACHEN UNIVERSITY
Augmented Reality. technische Möglichkeiten und praktische Anwendung. Prof. Dr. Gerhard Reitmayr ICG, TU Graz
 Augmented Reality technische Möglichkeiten und praktische Anwendung Prof. Dr. Gerhard Reitmayr ICG, TU Graz Daten mit Raumbezug 2 Visualisierung Augmented Reality 3 Augmented Reality Verbindet Reales und
Augmented Reality technische Möglichkeiten und praktische Anwendung Prof. Dr. Gerhard Reitmayr ICG, TU Graz Daten mit Raumbezug 2 Visualisierung Augmented Reality 3 Augmented Reality Verbindet Reales und
Visuelle Information zur robusten Zuordnung von Landmarken für die Navigation mobiler Roboter
 Visuelle Information zur robusten Zuordnung von Landmaren für die Navigation mobiler Roboter Forum Bildverarbeitung 2010 Thomas Emter Thomas Ulrich Loalisierung Herausforderungen Relative Sensoren (Dead
Visuelle Information zur robusten Zuordnung von Landmaren für die Navigation mobiler Roboter Forum Bildverarbeitung 2010 Thomas Emter Thomas Ulrich Loalisierung Herausforderungen Relative Sensoren (Dead
Projektpraktikum Augmented Reality Tracking in der Anwendung
 Projektpraktikum Augmented Reality Tracking in Prof. Dr. Stefan Müller, Martin Schumann Wintersemester 2011/2012 Institut für Computervisualistik Universität Koblenz Über mich Dipl-Inform Martin Schumann
Projektpraktikum Augmented Reality Tracking in Prof. Dr. Stefan Müller, Martin Schumann Wintersemester 2011/2012 Institut für Computervisualistik Universität Koblenz Über mich Dipl-Inform Martin Schumann
INDOOR-POSITIONIERUNG
 INDOOR-POSITIONIERUNG EIN ÜBERBLICK MIT AUSGEWÄHLTEN BEISPIELEN Jörg Blankenbach Geodätisches Institut, RWTH Aachen DGfK-Syposium 2015 Königslutter, 11.05.2015 Einleitung Motivation Nachfrage nach der
INDOOR-POSITIONIERUNG EIN ÜBERBLICK MIT AUSGEWÄHLTEN BEISPIELEN Jörg Blankenbach Geodätisches Institut, RWTH Aachen DGfK-Syposium 2015 Königslutter, 11.05.2015 Einleitung Motivation Nachfrage nach der
Neue Entwicklungen in der GNSS Technik
 Neue Entwicklungen in der GNSS Technik SONDIERUNG VERMESSUNG ABSTECKUNG ili gis-services Hersteller-unabhängiges Ingenieurbüro seit über 15 Jahren Maßgeschneiderte Hard- und Softwarekombinationen namhafter
Neue Entwicklungen in der GNSS Technik SONDIERUNG VERMESSUNG ABSTECKUNG ili gis-services Hersteller-unabhängiges Ingenieurbüro seit über 15 Jahren Maßgeschneiderte Hard- und Softwarekombinationen namhafter
Eingabegeräte. für Virtuelle Präsenz. Mark Poguntke 1 / 24. Proseminar Virtuelle Präsenz SS 2005 Universität Ulm
 Eingabegeräte für Virtuelle Präsenz Mark Poguntke mp17@informatik.uni-ulm.de Proseminar Virtuelle Präsenz SS 2005 Universität Ulm 1 / 24 Themenübersicht 1. Interaktion in virtuellen Welten 2. Verschiedene
Eingabegeräte für Virtuelle Präsenz Mark Poguntke mp17@informatik.uni-ulm.de Proseminar Virtuelle Präsenz SS 2005 Universität Ulm 1 / 24 Themenübersicht 1. Interaktion in virtuellen Welten 2. Verschiedene
Positionsbestimmung in Gebäuden
 Positionsbestimmung in Gebäuden Positionsbestimmung in Gebäuden Proseminar Technische Information Michael Schmidt Januar 2010 Positionsbestimmung in Gebäuden 1 Warum Indoor-Positionierung? Anwendungen:
Positionsbestimmung in Gebäuden Positionsbestimmung in Gebäuden Proseminar Technische Information Michael Schmidt Januar 2010 Positionsbestimmung in Gebäuden 1 Warum Indoor-Positionierung? Anwendungen:
Entwicklung eines Location Tracking Systems. Edyta Kutak
 Entwicklung eines Location Tracking Systems für r die Indoor Navigation Edyta Kutak Überblick Motivation Indoor Location Tracking Grundlage für f Lokationsverfahren Positionsbestimmungssysteme Kategorien
Entwicklung eines Location Tracking Systems für r die Indoor Navigation Edyta Kutak Überblick Motivation Indoor Location Tracking Grundlage für f Lokationsverfahren Positionsbestimmungssysteme Kategorien
Augmented Reality als moderne Darstellungsform von Geodaten
 Augmented Reality als moderne Darstellungsform von Geodaten Mag. Sven Leitinger Salzburg Research Forschungsgesellschaft mbh Was ist Augmented Reality? Augmented Reality = erweiterte Realität "computergestützte
Augmented Reality als moderne Darstellungsform von Geodaten Mag. Sven Leitinger Salzburg Research Forschungsgesellschaft mbh Was ist Augmented Reality? Augmented Reality = erweiterte Realität "computergestützte
Handgeführtes BIM-Aufmaßsystem- Untersuchung des Potentials eines mobilen low-cost Gerätes zur Erzeugung von 3D-Modellen
 - Untersuchung des Potentials eines mobilen low-cost Gerätes zur Erzeugung von 3D-Modellen Rebecca Achenbach Forum Bauinformatik 2017 07.09.2017 Zielsetzung & Vorgehensweise Bewertung des Google Tango
- Untersuchung des Potentials eines mobilen low-cost Gerätes zur Erzeugung von 3D-Modellen Rebecca Achenbach Forum Bauinformatik 2017 07.09.2017 Zielsetzung & Vorgehensweise Bewertung des Google Tango
3D Umfeldrekonstruktion über Structure from Motion
 A HELLA-Group Company 3D Umfeldrekonstruktion über Structure from Motion Dr. Ralph Hänsel, Hella Aglaia Mobile Vision GmbH 11.12.2015 Symposium Beuth Hochschule Geometrische Modellierung und Computational
A HELLA-Group Company 3D Umfeldrekonstruktion über Structure from Motion Dr. Ralph Hänsel, Hella Aglaia Mobile Vision GmbH 11.12.2015 Symposium Beuth Hochschule Geometrische Modellierung und Computational
Annährungssensoren. Induktive Sensoren. Kapazitive Sensoren. Ultraschall-Sensoren. Optische Anährungssensoren
 Annährungssensoren Zum Feststellen der Existenz eines Objektes innerhalb eines bestimmten Abstands. In der Robotik werden sie für die Nah-Gebiets-Arbeit, Objekt-Greifen oder Kollisionsvermeidung verwendet.
Annährungssensoren Zum Feststellen der Existenz eines Objektes innerhalb eines bestimmten Abstands. In der Robotik werden sie für die Nah-Gebiets-Arbeit, Objekt-Greifen oder Kollisionsvermeidung verwendet.
Der diskrete Kalman Filter
 Der diskrete Kalman Filter Fachbereich: Informatik Betreuer: Marc Drassler Patrick Winkler 1168954 6. Dezember 2004 Technische Universität Darmstadt Simulation und Systemoptimierung Darmstadt Dribbling
Der diskrete Kalman Filter Fachbereich: Informatik Betreuer: Marc Drassler Patrick Winkler 1168954 6. Dezember 2004 Technische Universität Darmstadt Simulation und Systemoptimierung Darmstadt Dribbling
Indoor Positionierungs-Technologien
 Indoor Positionierungs-Technologien Corina Kim Schindhelm Siemens 4. Deutscher AAL Kongress, 26. Januar 2011 Selbstständig, sicher, gesund und mobil im Alter. Smart Senior Zu Hause TV als zentrales Diensteportal
Indoor Positionierungs-Technologien Corina Kim Schindhelm Siemens 4. Deutscher AAL Kongress, 26. Januar 2011 Selbstständig, sicher, gesund und mobil im Alter. Smart Senior Zu Hause TV als zentrales Diensteportal
Quadrocopters and it s Applications: Overview of State of the Art Techniques
 : Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
: Overview of State of the Art Techniques Visual Tracking for Robotic Applications Sebastian Brunner Lehrstuhl für Echtzeitsysteme und Robotik Technische Universität München Email: brunnese@in.tum.de Date:
Bildflug - Navigation - HS BO Lab. für Photogrammetrie: Navigation 1
 Bildflug - Navigation - HS BO Lab. für Photogrammetrie: Navigation 1 Zielsetzung Direkte Messung der Position und Orientierung des airborne Sensors Notwendige Sensorik: GPS, IMU Zeitstempel: Position/
Bildflug - Navigation - HS BO Lab. für Photogrammetrie: Navigation 1 Zielsetzung Direkte Messung der Position und Orientierung des airborne Sensors Notwendige Sensorik: GPS, IMU Zeitstempel: Position/
Was sind Sensoren? Sensoren sind (elektronische) Bauteile zur qualitativen oder quantitativen Messungbestimmter Größen und Eigenschaften.
 Bauteile zur qualitativen oder quantitativen Messungbestimmter Größen und Eigenschaften.") Sensoren Was sind Sensoren? Sensoren sind (elektronische) Bauteile zur qualitativen oder quantitativen Messungbestimmter Größen und Eigenschaften. Was messen Sensoren? Wärmestrahlung Temperatur Feuchtigkeit
Sensoren Was sind Sensoren? Sensoren sind (elektronische) Bauteile zur qualitativen oder quantitativen Messungbestimmter Größen und Eigenschaften. Was messen Sensoren? Wärmestrahlung Temperatur Feuchtigkeit
Orientierungsbestimmung mobiler Objekte unter Verwendung von Magnet- und MEMS Inertialsensoren
 . Orientierungsbestimmung mobiler Objekte unter Verwendung von Magnet- und MEMS Inertialsensoren Geodätische Woche 2013 F. Zimmermann, C. Eling, L. Klingbeil, H. Kuhlmann 08.10.2013 Unmanned Aerial Vehicle
. Orientierungsbestimmung mobiler Objekte unter Verwendung von Magnet- und MEMS Inertialsensoren Geodätische Woche 2013 F. Zimmermann, C. Eling, L. Klingbeil, H. Kuhlmann 08.10.2013 Unmanned Aerial Vehicle
Implementierung des Scan-Matching-Algorithmus MbICP im Fach Mensch-Maschine- Kommunikation/Robotik
 Implementierung des Scan-Matching-Algorithmus MbICP im Fach Mensch-Maschine- Kommunikation/Robotik Betreuer: Dipl.-Inf. (FH) Peter Poschmann Enrico Uhlig, Markus Fischer, Marcus Kupke 26. Jun 2012 1 Gliederung
Implementierung des Scan-Matching-Algorithmus MbICP im Fach Mensch-Maschine- Kommunikation/Robotik Betreuer: Dipl.-Inf. (FH) Peter Poschmann Enrico Uhlig, Markus Fischer, Marcus Kupke 26. Jun 2012 1 Gliederung
Kartenerstellung und Navigation
 Kartenerstellung und Navigation zur Positionserkennung autonomer Fahrzeuge von Ilona Blanck 27. Mai 2008 im Rahmen der Anwendungen I Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik
Kartenerstellung und Navigation zur Positionserkennung autonomer Fahrzeuge von Ilona Blanck 27. Mai 2008 im Rahmen der Anwendungen I Vorlesung des Masterstudiums Informatik der Fakultät Technik und Informatik
Exploring Mobility.
 Exploring Mobility »Möglichkeiten für Location- Based Services in komplexen Strukturen und Umgebungen am Beispiel Bluetooth Low Energy «ecom instruments GmbH Dietmar Deppisch Product Manager System Solutions
Exploring Mobility »Möglichkeiten für Location- Based Services in komplexen Strukturen und Umgebungen am Beispiel Bluetooth Low Energy «ecom instruments GmbH Dietmar Deppisch Product Manager System Solutions
Tracking Technologien für Augmented Reality
 Tracking Technologien für Augmented Reality 1 Inhalt Motivation Tracking Methoden Optisch MarkerlessTracking (kleine Wiederholung) Aktiv und Passive Marker Modellbasiertes Markerless Tracking Sensoren
Tracking Technologien für Augmented Reality 1 Inhalt Motivation Tracking Methoden Optisch MarkerlessTracking (kleine Wiederholung) Aktiv und Passive Marker Modellbasiertes Markerless Tracking Sensoren
INDOOR-NAVIGATION FÜR ANDROID-GERÄTE MIT UNTERSTÜTZUNG DURCH AUGMENTED-REALITY-TECHNIKEN. Andreas Hümmerich Echtzeit 2016
 INDOOR-NAVIGATION FÜR ANDROID-GERÄTE MIT UNTERSTÜTZUNG DURCH AUGMENTED-REALITY-TECHNIKEN Andreas Hümmerich Echtzeit 2016 Aufgabenstellung Stand der Technik Unterteilung der Aufgabenstellung 3 4 5 ÜBERBLICK
INDOOR-NAVIGATION FÜR ANDROID-GERÄTE MIT UNTERSTÜTZUNG DURCH AUGMENTED-REALITY-TECHNIKEN Andreas Hümmerich Echtzeit 2016 Aufgabenstellung Stand der Technik Unterteilung der Aufgabenstellung 3 4 5 ÜBERBLICK
Augmented Reality als moderne Darstellungsform für Geodaten
 Augmented Reality als moderne Darstellungsform für Geodaten VOGIS-Fachtagung 2010 11. November 2010 DI Karl Rehrl Salzburg Research Forschungsgesellschaft m.b.h. Jakob Haringer Straße 5/3 5020 Salzburg,
Augmented Reality als moderne Darstellungsform für Geodaten VOGIS-Fachtagung 2010 11. November 2010 DI Karl Rehrl Salzburg Research Forschungsgesellschaft m.b.h. Jakob Haringer Straße 5/3 5020 Salzburg,
HAW Hamburg Anwendung 1 - Vortrag Andrej Rull
 HAW Hamburg Anwendung 1 - Vortrag Andrej Rull 02122008 1 Gliederung o Motivation o Der Anwendungsfall o Das SLAM Problem o Lösungsansätze und Algorithmen o Zusammenfassung o Ausblick auf AW2 2 Motivation
HAW Hamburg Anwendung 1 - Vortrag Andrej Rull 02122008 1 Gliederung o Motivation o Der Anwendungsfall o Das SLAM Problem o Lösungsansätze und Algorithmen o Zusammenfassung o Ausblick auf AW2 2 Motivation
INDOOR-POSITIONIERUNG
 INDOOR-POSITIONIERUNG EIN ÜBERBLICK MIT AUSGEWÄHLTEN BEISPIELEN Jörg Blankenbach Geodätisches Institut, RWTH Aachen Workshop 3D-Stadtmodelle Bonn, 05.11.2014 Agenda Ausgewählte Systeme Infrastrukturgestützte
INDOOR-POSITIONIERUNG EIN ÜBERBLICK MIT AUSGEWÄHLTEN BEISPIELEN Jörg Blankenbach Geodätisches Institut, RWTH Aachen Workshop 3D-Stadtmodelle Bonn, 05.11.2014 Agenda Ausgewählte Systeme Infrastrukturgestützte
MARKERLESS AUGMENTED REALITY. Henrik Brauer
 MARKERLESS AUGMENTED REALITY Henrik Brauer Inhalt Was ist Augmented Reality Meine Motivation Grundlagen Positionsbestimmung mit Marker Positionsbestimmung ohne Marker Idee Risiken INHALT Augmented Reality
MARKERLESS AUGMENTED REALITY Henrik Brauer Inhalt Was ist Augmented Reality Meine Motivation Grundlagen Positionsbestimmung mit Marker Positionsbestimmung ohne Marker Idee Risiken INHALT Augmented Reality
Grundlagen GPS. Copyright by Compass Yachtzubehör
 Grundlagen GPS Was bedeutet GPS? Wofür wurde GPS entwickelt? Geschichtlicher Rückblick Aufbau des Satelliten Systems Funktionsweise des GPS-Systems Genauigkeit des GPS Systems und deren Faktoren WAAS /
Grundlagen GPS Was bedeutet GPS? Wofür wurde GPS entwickelt? Geschichtlicher Rückblick Aufbau des Satelliten Systems Funktionsweise des GPS-Systems Genauigkeit des GPS Systems und deren Faktoren WAAS /
Indoor-Navigation ermöglicht den Einsatz neuer Technik für Mensch und Maschine
 Indoor-Navigation ermöglicht den Einsatz neuer Technik für Mensch und Maschine Zusammenfassung Die Indoor-Navigation gewinnt mit der steigenden Digitalisierung und Automatisierung von Unternehmensprozessen
Indoor-Navigation ermöglicht den Einsatz neuer Technik für Mensch und Maschine Zusammenfassung Die Indoor-Navigation gewinnt mit der steigenden Digitalisierung und Automatisierung von Unternehmensprozessen
Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren.
 Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren www.joanneum.at/digital Wozu braucht mein Auto eine Karte? 2 Mensch als Fahrer: Karte wird zum Navigieren
Capturing Reality Hoch aufgelöste statische und dynamische Kartierung für hochautomatisiertes Fahren www.joanneum.at/digital Wozu braucht mein Auto eine Karte? 2 Mensch als Fahrer: Karte wird zum Navigieren
Das Place Lab Projekt
 Das Place Lab Projekt Mobile Business Seminar Lehrstuhl für Praktische Informatik IV Prof. Dr. Wolfgang Effelsberg Betreuer: Thomas King dkoelsch@rumms.uni-mannheim.de Seminar Mobile-Business 21.12.2005
Das Place Lab Projekt Mobile Business Seminar Lehrstuhl für Praktische Informatik IV Prof. Dr. Wolfgang Effelsberg Betreuer: Thomas King dkoelsch@rumms.uni-mannheim.de Seminar Mobile-Business 21.12.2005
GPS Analogieexperiment
 Didaktik der Physik, Ruhr-Universität Bochum, www.dp.rub.de GPS Analogieexperiment Einleitung Das Global Positioning System (GPS) erlangt zunehmende Bedeutung in vielen technischen Anwendungen. Im täglichen
Didaktik der Physik, Ruhr-Universität Bochum, www.dp.rub.de GPS Analogieexperiment Einleitung Das Global Positioning System (GPS) erlangt zunehmende Bedeutung in vielen technischen Anwendungen. Im täglichen
Fußgängernavigation per Fotohandy. Vergleich mit alternativen Verfahren und wirtschaftliche Nutzung
 Fußgängernavigation per Fotohandy Vergleich mit alternativen Verfahren und wirtschaftliche Nutzung Navigationsalternativen Stadtplan, allgemein: Karte Selbstständiges Einordnen der eigenen Position Astronomische
Fußgängernavigation per Fotohandy Vergleich mit alternativen Verfahren und wirtschaftliche Nutzung Navigationsalternativen Stadtplan, allgemein: Karte Selbstständiges Einordnen der eigenen Position Astronomische
Endvortrag Echtzeitsystem Projektseminar
 Endvortrag Echtzeitsystem Projektseminar Team Apollo 13: Sebastian Ehmes, Nicolas Acero, Huyhn-Tan Truong, Li Zhao 1 29.02.16 Gliederung I. Recap: Mission 1 & Mission 2 II. Mission 2: Selbstlokalisierung
Endvortrag Echtzeitsystem Projektseminar Team Apollo 13: Sebastian Ehmes, Nicolas Acero, Huyhn-Tan Truong, Li Zhao 1 29.02.16 Gliederung I. Recap: Mission 1 & Mission 2 II. Mission 2: Selbstlokalisierung
Heute wird es interaktiv! Wer mitmachen möchte, kann sich folgende Apps herunterladen:
 Heute wird es interaktiv! Wer mitmachen möchte, kann sich folgende Apps herunterladen: Name Betriebssystem Vorraussetzungen Layar Android, ios Internetzugang Wikitude Android, ios, BlackBerry, Windows
Heute wird es interaktiv! Wer mitmachen möchte, kann sich folgende Apps herunterladen: Name Betriebssystem Vorraussetzungen Layar Android, ios Internetzugang Wikitude Android, ios, BlackBerry, Windows
MOBILE SENSING ZUR U-BAHN-NAVIGATION UIS 2016 HTWK LEIPZIG
 MOBILE SENSING ZUR U-BAHN-NAVIGATION UIS 2016 HTWK LEIPZIG Matthias Heyde / Fraunhofer FOKUS Frank Fuchs-Kittowski & Daniel Faust, 2. Juni 2016 AGENDA 1. Einführung 2. Anwendungsszenario U-Bahn-Navigation
MOBILE SENSING ZUR U-BAHN-NAVIGATION UIS 2016 HTWK LEIPZIG Matthias Heyde / Fraunhofer FOKUS Frank Fuchs-Kittowski & Daniel Faust, 2. Juni 2016 AGENDA 1. Einführung 2. Anwendungsszenario U-Bahn-Navigation
Bereitstellung und Nutzung von Ortsinformationen
 Adrian Listyo Betreuerin: Svetlana Domnitcheva 1 Ueberblick Anwendungsmöglichkeiten Techniken zur Bestimmung der Position Technologien: Evaluation und Anwendungen Sensor Fusion Entwicklung 2 Anwendungsmöglichkeiten
Adrian Listyo Betreuerin: Svetlana Domnitcheva 1 Ueberblick Anwendungsmöglichkeiten Techniken zur Bestimmung der Position Technologien: Evaluation und Anwendungen Sensor Fusion Entwicklung 2 Anwendungsmöglichkeiten
Autonome Roboter. Von Matthias Hauth Seminar Moderne Robotik
 Autonome Roboter Von Matthias Hauth Seminar Moderne Robotik Inhalt Autonome Roboter Mobile Roboter Roboter Architekturen Deliberative, reactive (z.b. Genghis), hybrid Gegenüberstellung deliberative - reactive
Autonome Roboter Von Matthias Hauth Seminar Moderne Robotik Inhalt Autonome Roboter Mobile Roboter Roboter Architekturen Deliberative, reactive (z.b. Genghis), hybrid Gegenüberstellung deliberative - reactive
Fusion multimodaler Positionsdaten zur Ortung und Navigation in übergreifenden Mobilitätsketten durch allgegenwärtige Technologien
 Fusion multimodaler Positionsdaten zur Ortung und Navigation in übergreifenden Mobilitätsketten durch allgegenwärtige Technologien B. Kotterba, F. Bintakis, M. Lieboner, S. Ritter, L. Schmidt 1 J. Muschiol,
Fusion multimodaler Positionsdaten zur Ortung und Navigation in übergreifenden Mobilitätsketten durch allgegenwärtige Technologien B. Kotterba, F. Bintakis, M. Lieboner, S. Ritter, L. Schmidt 1 J. Muschiol,
Trackersysteme (Non Vision)
") Trackersysteme (Non Vision) Hauptseminar "Virtual and Augmented Reality 24.5.2004 Tracker Systeme Jürgen Pattis 1 Definition und Zweck von Tracking Def.: Ein Trackingsystem ist ein System, das einem Benutzer
Trackersysteme (Non Vision) Hauptseminar "Virtual and Augmented Reality 24.5.2004 Tracker Systeme Jürgen Pattis 1 Definition und Zweck von Tracking Def.: Ein Trackingsystem ist ein System, das einem Benutzer
Indoor Positioning System
 Alexander Blum Matrikelnummer 03618629 17.09.2012 12.10.2012 4 Wochen Indoor Positioning System eine Ingenieurpraxis von Alexander Blum Betreuung durch Johannes Feldmaier Motivation Üblicherweise wird
Alexander Blum Matrikelnummer 03618629 17.09.2012 12.10.2012 4 Wochen Indoor Positioning System eine Ingenieurpraxis von Alexander Blum Betreuung durch Johannes Feldmaier Motivation Üblicherweise wird
Lokalisierung und Topologiekontrolle
 Lokalisierung und Topologiekontrolle Seminar: Kommunikation in drahtlosen Sensornetzwerken Martin Schmidt Einführung Lokalisierung: Für viele Informationen ist die Position wichtig Traditionelle Technik
Lokalisierung und Topologiekontrolle Seminar: Kommunikation in drahtlosen Sensornetzwerken Martin Schmidt Einführung Lokalisierung: Für viele Informationen ist die Position wichtig Traditionelle Technik
6. KIRAS Fachtagung 18. Oktober 2016, Wien. RelCon. Reliable Control of Semi-Autonomous Platforms
 6. KIRAS Fachtagung 18. Oktober 2016, Wien Reliable Control of Semi-Autonomous Platforms Verlässliche Führung semi-autonomer Fahrzeuge Förderprogramm: KIRAS Fördergeber: BMVIT / FFG Budget: Gesamt: ca.
6. KIRAS Fachtagung 18. Oktober 2016, Wien Reliable Control of Semi-Autonomous Platforms Verlässliche Führung semi-autonomer Fahrzeuge Förderprogramm: KIRAS Fördergeber: BMVIT / FFG Budget: Gesamt: ca.
Machine Vision einfach zugänglich gemacht für jede Anwendung von 2D bis 6D
 Plug & Automate für die 3D Roboterführung Machine Vision einfach zugänglich gemacht für jede Anwendung von 2D bis 6D Wie lässt sich anspruchsvolle 3D Roboterführung schnell und einfach den Anwendern zur
Plug & Automate für die 3D Roboterführung Machine Vision einfach zugänglich gemacht für jede Anwendung von 2D bis 6D Wie lässt sich anspruchsvolle 3D Roboterführung schnell und einfach den Anwendern zur
POMAR 3D. Positionierung und Orientierung Clients. Dipl.-Ing. Elise Taichmann. NAVIGATIONS-GET-TOGETHER 20. Oktober 2009, Graz
 POMAR 3D Positionierung und Orientierung eines Augmented-Reality Clients Dipl.-Ing. Elise Taichmann 20. Oktober 2009, Graz Inhalt 1. Das Projekt 2. Die Anwendung 3. Herausforderungen 4. Umsetzung 5. Beispiele
POMAR 3D Positionierung und Orientierung eines Augmented-Reality Clients Dipl.-Ing. Elise Taichmann 20. Oktober 2009, Graz Inhalt 1. Das Projekt 2. Die Anwendung 3. Herausforderungen 4. Umsetzung 5. Beispiele
Intelligente Transportsysteme
 Intelligente Transportsysteme Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz SS 2004 Michael Arnold Typen intelligenter Transportsysteme Fahrer-Assistenz-Systeme Mensch hat Kontrolle
Intelligente Transportsysteme Universität Ulm Fakultät für Informatik Proseminar Künstliche Intelligenz SS 2004 Michael Arnold Typen intelligenter Transportsysteme Fahrer-Assistenz-Systeme Mensch hat Kontrolle
1 Referenzpunkte für. MagicMap mit Nokia N810
 1 Referenzpunkte für MagicMap mit Nokia N810 Ideen für das Projekt Ziele 2 Monitor Modus für Signalstärkenmessung (MagicMap) nicht nötig nicht weiter untersucht Kismet Anleitung für N800 aber: OS2007,
1 Referenzpunkte für MagicMap mit Nokia N810 Ideen für das Projekt Ziele 2 Monitor Modus für Signalstärkenmessung (MagicMap) nicht nötig nicht weiter untersucht Kismet Anleitung für N800 aber: OS2007,
verteilte Systeme (Anwendung Quadrocopter) an.
 an.") verteilte Systeme 15.05.2012 Quadrocopter für Aufgaben im Indoor-Bereich (Luftfahrtinformatik). Die Systeme sollen in die Lage versetzt werden selbstständig (autonom) zu agieren (z.b. Suchen durchführen)
verteilte Systeme 15.05.2012 Quadrocopter für Aufgaben im Indoor-Bereich (Luftfahrtinformatik). Die Systeme sollen in die Lage versetzt werden selbstständig (autonom) zu agieren (z.b. Suchen durchführen)
Automatische Erkennung von Fortbewegungsmitteln AW2. Christian Wagner
 Automatische Erkennung von Fortbewegungsmitteln AW2 Christian Wagner 11.06.2009 Agenda Einführung ins Thema Ziel Ansätze Forschungsbereich: Sensor Fusion Projekte Techniken Einordnung der Arbeit Ziele
Automatische Erkennung von Fortbewegungsmitteln AW2 Christian Wagner 11.06.2009 Agenda Einführung ins Thema Ziel Ansätze Forschungsbereich: Sensor Fusion Projekte Techniken Einordnung der Arbeit Ziele
IdentPro Intralogistiklösungen für. Rostock, 01. Juni 2016
 IdentPro Intralogistiklösungen für Rostock, 01. Juni 2016 IdentPro Intralogistiklösungen für Seehafen Wismar I N D U S T R I E 4.0 Teilnehmer Herr Groß Herr Peters Herr Rudat Herr Kremp Wismar, 16. Novemberr
IdentPro Intralogistiklösungen für Rostock, 01. Juni 2016 IdentPro Intralogistiklösungen für Seehafen Wismar I N D U S T R I E 4.0 Teilnehmer Herr Groß Herr Peters Herr Rudat Herr Kremp Wismar, 16. Novemberr
(Indoor)-Lokalisation
-Lokalisation") (Indoor)-Lokalisation Mathias Pelka http://www.cosa.fh-luebeck.de 19.05.2014 2014 Forschung erforschen 1 Global Positioning System (NAVSTAR GPS) Ermöglicht die Positionsbestimmung Zwei Frequenzen (L1,
(Indoor)-Lokalisation Mathias Pelka http://www.cosa.fh-luebeck.de 19.05.2014 2014 Forschung erforschen 1 Global Positioning System (NAVSTAR GPS) Ermöglicht die Positionsbestimmung Zwei Frequenzen (L1,
Mobile projizierte Benutzerschnittstellen
 Mobile projizierte Benutzerschnittstellen Caroline Bösinger 10. Mai 2005 Betreuer: Marc Langheinrich Überblick Einführung Vorstellung von drei Systemen: 1) Mobiles Display mit Lichtsensor: BurningWell
Mobile projizierte Benutzerschnittstellen Caroline Bösinger 10. Mai 2005 Betreuer: Marc Langheinrich Überblick Einführung Vorstellung von drei Systemen: 1) Mobiles Display mit Lichtsensor: BurningWell
In- und Outdoor Positionierungssysteme
 In- und Outdoor Positionierungssysteme Eine Übersicht hlemelso@rumms.uni-mannheim.de Lehrstuhl für Praktische Informatik IV In- und Outdoor Positionierungssysteme Agenda I. Warum Positionierung? II. III.
In- und Outdoor Positionierungssysteme Eine Übersicht hlemelso@rumms.uni-mannheim.de Lehrstuhl für Praktische Informatik IV In- und Outdoor Positionierungssysteme Agenda I. Warum Positionierung? II. III.
RatSLAM. Torben Becker. 24. Mai HAW Hamburg
 HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
HAW Hamburg 24. Mai 2012 Gliederung 1 Motivation 2 3 Aussicht 2 / 21 Motivation Warum SLAM? Navigation Umgebungskartografie Feststellung der Position innerhalb eines Geländes ohne Funksignale Keine vorherige
Reaktive und Hybride Agenten
 Reaktive und Hybride Agenten Seminar: Agentensysteme SS10 Jens Wittrowski (jens.wittrowski@uni-bielefeld.de) Einleitung / Motivation Probleme mit Agenten, welche eine symbolische / logische Repräsentation
Reaktive und Hybride Agenten Seminar: Agentensysteme SS10 Jens Wittrowski (jens.wittrowski@uni-bielefeld.de) Einleitung / Motivation Probleme mit Agenten, welche eine symbolische / logische Repräsentation
Indoor Positionierung Anforderungen und technische Möglichkeiten
 Indoor Positionierung Anforderungen und technische Möglichkeiten Sommersemester 2007 HAW Hamburg Sebastian Gregor Hamburg, 29.05.2007 Überblick Einleitung: Wozu überhaupt Indoor Positionierung? Techniken
Indoor Positionierung Anforderungen und technische Möglichkeiten Sommersemester 2007 HAW Hamburg Sebastian Gregor Hamburg, 29.05.2007 Überblick Einleitung: Wozu überhaupt Indoor Positionierung? Techniken
inreach Serie Überall unterwegs. Immer in Verbindung. #BeatYesterday.
 inreach Serie inreach Serie Die inreach-serie bietet dir eine zuverlässige Zwei-Wege- Kommunikation für Abenteuer in extremen Situationen. Lust auf ein entlegenes Bergabenteuer? Willst du auf hoher See
inreach Serie inreach Serie Die inreach-serie bietet dir eine zuverlässige Zwei-Wege- Kommunikation für Abenteuer in extremen Situationen. Lust auf ein entlegenes Bergabenteuer? Willst du auf hoher See
Von A nach B: Wie funktioniert digitale Navigation? Doris Silbernagl, Nikolaus VWA-Workshop; Innsbruck;
 Von A nach B: Wie funktioniert digitale Navigation? Doris Silbernagl, Nikolaus Krismer @ VWA-Workshop; Innsbruck; 07.06.2016 Page 1 Einteilung Begriffsklärung Digitale Navigation Positionsbestimmung Geoinformation
Von A nach B: Wie funktioniert digitale Navigation? Doris Silbernagl, Nikolaus Krismer @ VWA-Workshop; Innsbruck; 07.06.2016 Page 1 Einteilung Begriffsklärung Digitale Navigation Positionsbestimmung Geoinformation
Rotationsgerät. Wir können 4 Parameter variieren, die die Beschleunigung des Systems beeinflussen:
 Rotationsgerät Übersicht Mit diesem Gerät wird der Einfluss eines Moments auf einen rotierenden Körper untersucht. Das Gerät besteht aus einer auf Kugellagern in einem stabilen Rahmen gelagerten Vertikalachse.
Rotationsgerät Übersicht Mit diesem Gerät wird der Einfluss eines Moments auf einen rotierenden Körper untersucht. Das Gerät besteht aus einer auf Kugellagern in einem stabilen Rahmen gelagerten Vertikalachse.
3. Übung IHCI. Markus Weber
 3. Übung IHCI Markus Weber 3. Übungsblatt Fragen Stoff der sechsten siebten und achten Vorlesung Implementierung Automatische Ziffernerkennung Fragen: Multi-Touch (1) Im Zusammenhang mit Multi-Touch Tischen:
3. Übung IHCI Markus Weber 3. Übungsblatt Fragen Stoff der sechsten siebten und achten Vorlesung Implementierung Automatische Ziffernerkennung Fragen: Multi-Touch (1) Im Zusammenhang mit Multi-Touch Tischen:
Lokalisierung. von Matthias Heine, Norbert Müller, Silvia Schreier, Oliver Zöllner
 Lokalisierung von Matthias Heine, Norbert Müller, Silvia Schreier, Oliver Zöllner Was ist Lokalisierung? Fähigkeit eines autonomen Roboters seine Position in Bezug auf ein festes (Koordinaten-)System zu
Lokalisierung von Matthias Heine, Norbert Müller, Silvia Schreier, Oliver Zöllner Was ist Lokalisierung? Fähigkeit eines autonomen Roboters seine Position in Bezug auf ein festes (Koordinaten-)System zu
IT in der Holzernte künftig noch mehr
 IT in der Holzernte künftig noch mehr Friedrich Hollmeier Dipl. Forstwirt Produktmanagement und Vertrieb LogBuch GmbH & Co. KG Martin Schraitle Bachelor-Student Forstwirtschaft & Forstwirtschaftsmeister
IT in der Holzernte künftig noch mehr Friedrich Hollmeier Dipl. Forstwirt Produktmanagement und Vertrieb LogBuch GmbH & Co. KG Martin Schraitle Bachelor-Student Forstwirtschaft & Forstwirtschaftsmeister
Verfahren zur autonomen bildgestützten Navigation
 Verfahren zur autonomen bildgestützten Navigation DGLR Workshop, 14. - 15.2.2007 Führungsaspekte unbemannter Luftfahrzeuge: Technologien und die Einbeziehung des Operateurs N. Schweyer, MBDA LFK-Lenkflugkörpersysteme
Verfahren zur autonomen bildgestützten Navigation DGLR Workshop, 14. - 15.2.2007 Führungsaspekte unbemannter Luftfahrzeuge: Technologien und die Einbeziehung des Operateurs N. Schweyer, MBDA LFK-Lenkflugkörpersysteme
Ortsbestimmung und Ortsmodelle
 Ortsbestimmung und Ortsmodelle Distributed Systems Seminar Thomas Gloor Betreuer: Christian Frank Aufteilung Teil 1: Ortsbestimmung am Beispiel von Place Lab Thomas Gloor Teil 2: Ortsmodelle und ihre Anwendungen
Ortsbestimmung und Ortsmodelle Distributed Systems Seminar Thomas Gloor Betreuer: Christian Frank Aufteilung Teil 1: Ortsbestimmung am Beispiel von Place Lab Thomas Gloor Teil 2: Ortsmodelle und ihre Anwendungen
Hochschule Düsseldorf University of Applied Sciences. 22. Oktober 2015 HSD. Physik. Gravitation
 22. Oktober 2015 Physik Gravitation Newton s Gravitationsgesetz Schwerpunkt Bewegungen, Beschleunigungen und Kräfte können so berechnet werden, als würden Sie an einem einzigen Punkt des Objektes angreifen.
22. Oktober 2015 Physik Gravitation Newton s Gravitationsgesetz Schwerpunkt Bewegungen, Beschleunigungen und Kräfte können so berechnet werden, als würden Sie an einem einzigen Punkt des Objektes angreifen.
SmartLocate - Indoor-Personenlokalisierung mittels Smart-Phone-Sensorik und Bluetooth- Beacons
 Prof. Dr.-Ing. Jörg Franke Lehrstuhl für Fertigungsautomatisierung und Produktionssystematik Friedrich-Alexander-Universität Erlangen-Nürnberg SmartLocate - Indoor-Personenlokalisierung mittels Smart-Phone-Sensorik
Prof. Dr.-Ing. Jörg Franke Lehrstuhl für Fertigungsautomatisierung und Produktionssystematik Friedrich-Alexander-Universität Erlangen-Nürnberg SmartLocate - Indoor-Personenlokalisierung mittels Smart-Phone-Sensorik
FORERUNNER 230 FORERUNNER 35 FORERUNNER 235 FORERUNNER 935 FORERUNNER 735XT 5S 5 5X RUNNING
 StartNow NextLevel HighPerformance 35 230 235 735XT 935 FĒNIX 5S 5 5X LAUFEN MIT HERZ. Forerunner 35. Die GPS-Laufuhr mit Herzfrequenz am Handgelenk. Der Forerunner 35 ist schlau, leicht und der perfekte
StartNow NextLevel HighPerformance 35 230 235 735XT 935 FĒNIX 5S 5 5X LAUFEN MIT HERZ. Forerunner 35. Die GPS-Laufuhr mit Herzfrequenz am Handgelenk. Der Forerunner 35 ist schlau, leicht und der perfekte
*DE A *
 (19) *DE102015203968A120160616* (10) DE 10 2015 203 968 A1 2016.06.16 (12) Offenlegungsschrift (21) Aktenzeichen: 10 2015 203 968.4 (22) Anmeldetag: 05.03.2015 (43) Offenlegungstag: 16.06.2016 (66) Innere
(19) *DE102015203968A120160616* (10) DE 10 2015 203 968 A1 2016.06.16 (12) Offenlegungsschrift (21) Aktenzeichen: 10 2015 203 968.4 (22) Anmeldetag: 05.03.2015 (43) Offenlegungstag: 16.06.2016 (66) Innere
Proseminar Künstliche Intelligenz: Wahrnehmung
 Proseminar Künstliche Intelligenz: Wahrnehmung Sommersemester 2011 Computer Science Department Group Inhalt Department of Informatics 1 Sensoren 2 Bildverarbeitung Kantenerkennung 3D-Informationen extrahieren
Proseminar Künstliche Intelligenz: Wahrnehmung Sommersemester 2011 Computer Science Department Group Inhalt Department of Informatics 1 Sensoren 2 Bildverarbeitung Kantenerkennung 3D-Informationen extrahieren
GPS (Global Positioning System)
") GPS (Global Positioning System) HF-Praktikum Referat von : Sabine Sories Thomas Schmitz Tobias Weling Inhalt: - Geschichte - Prinzip - Fehlerquellen - Zukünftige Systeme 1 GPS (Global Positioning System)
GPS (Global Positioning System) HF-Praktikum Referat von : Sabine Sories Thomas Schmitz Tobias Weling Inhalt: - Geschichte - Prinzip - Fehlerquellen - Zukünftige Systeme 1 GPS (Global Positioning System)
DIGITALES PLANEN UND GESTALTEN 2015
 DIGITALES PLANEN UND GESTALTEN 2015 Augmented Reality für die Assistenz von Entscheidungsprozessen in urbanen Umgebungen Fraunhofer-Institut für Fabrikbetrieb und -automatisierung IFF Dessau, 04. Juni
DIGITALES PLANEN UND GESTALTEN 2015 Augmented Reality für die Assistenz von Entscheidungsprozessen in urbanen Umgebungen Fraunhofer-Institut für Fabrikbetrieb und -automatisierung IFF Dessau, 04. Juni
CAIMAN M Weitwinkel STOP+MOTION Radardetektor
 SWARCO TRAFFIC SYSTEMS GMBH TECHNOLOGIETAG SWARCO 2015 13. März 2015 CAIMAN M Weitwinkel STOP+MOTION Radardetektor CAIMAN M Weitwinkel STOP+MOTION Radar CAIMAN M Weitwinkel STOP+MOTION Radardetektor 1
SWARCO TRAFFIC SYSTEMS GMBH TECHNOLOGIETAG SWARCO 2015 13. März 2015 CAIMAN M Weitwinkel STOP+MOTION Radardetektor CAIMAN M Weitwinkel STOP+MOTION Radar CAIMAN M Weitwinkel STOP+MOTION Radardetektor 1
3D-Aspekte bei der Bildfusion am Beispiel von IR- und VIS-Daten Referenten: Dipl.-Ing. Torsten Koch PD Dr. Karl-Heinz Franke
 3D-Aspekte bei der Bildfusion am Beispiel von IR- und VIS-Daten Referenten: Dipl.-Ing. Torsten Koch PD Dr. Karl-Heinz Franke Bildmaterial mit freundlicher Genehmigung von JenOptik L.O.S. Zielstellung 4
3D-Aspekte bei der Bildfusion am Beispiel von IR- und VIS-Daten Referenten: Dipl.-Ing. Torsten Koch PD Dr. Karl-Heinz Franke Bildmaterial mit freundlicher Genehmigung von JenOptik L.O.S. Zielstellung 4
Praktikum und Projektarbeit in Kooperation mit der documedias GmbH. von Jan Hendrik Sarstedt IMIT im 6. Semester an der Universität Hildesheim
 Praktikum und Projektarbeit in Kooperation mit der documedias GmbH IMIT im 6. Semester an der Universität Hildesheim Inhalt 1. documedias 2. Praktikum a. Allgemein b. MapCoordinates 3. Projektarbeit a.
Praktikum und Projektarbeit in Kooperation mit der documedias GmbH IMIT im 6. Semester an der Universität Hildesheim Inhalt 1. documedias 2. Praktikum a. Allgemein b. MapCoordinates 3. Projektarbeit a.
Hauptseminar Roboternavigation. Kartenaufbau nach Thrun
 Hauptseminar Roboternavigation Kartenaufbau nach Thrun Hannes Keil keil@in.tum.de 18. Januar 2002 Überblick Kartenaufbau nach Thrun Überblick 1. Einführung in den Kartenbau 2. Einführung in den Aufbau
Hauptseminar Roboternavigation Kartenaufbau nach Thrun Hannes Keil keil@in.tum.de 18. Januar 2002 Überblick Kartenaufbau nach Thrun Überblick 1. Einführung in den Kartenbau 2. Einführung in den Aufbau
Unsere Ziele
 www.hilfsgemeinschaft.at Unsere Ziele Selbstbestimmtes und gleichberechtigtes Leben für sehbehinderte und blinde Menschen Eigenständigkeit und Unabhängigkeit in der Lebensgestaltung Steigende Lebensqualität
www.hilfsgemeinschaft.at Unsere Ziele Selbstbestimmtes und gleichberechtigtes Leben für sehbehinderte und blinde Menschen Eigenständigkeit und Unabhängigkeit in der Lebensgestaltung Steigende Lebensqualität
Standortbestimmung Nokia N76-1
 Nokia N76-1 2007 Nokia. Alle Rechte vorbehalten. Nokia, Nokia Connecting People, Nseries und N76 sind Marken oder eingetragene Marken der Nokia Corporation. Andere in diesem Handbuch erwähnte Produktund
Nokia N76-1 2007 Nokia. Alle Rechte vorbehalten. Nokia, Nokia Connecting People, Nseries und N76 sind Marken oder eingetragene Marken der Nokia Corporation. Andere in diesem Handbuch erwähnte Produktund
5.0 Lage- und Richtungsbestimmung, Melanie Läge
 5.0 Lage- und Richtungsbestimmung, Melanie Läge Eine wichtiges Merkmal, ohne das ein Cyberspace nicht funktionieren würde, ist die Lage- und Richtungsbestimmung. Da die virtuelle Welt ähnlich der realen
5.0 Lage- und Richtungsbestimmung, Melanie Läge Eine wichtiges Merkmal, ohne das ein Cyberspace nicht funktionieren würde, ist die Lage- und Richtungsbestimmung. Da die virtuelle Welt ähnlich der realen
Wo bin ich und wann fährt mein Zug? Navigation für ÖV-Kunden
 Navigation für ÖV-Kunden Fachgebiet Schienenfahrwege und Bahnbetrieb Technische Universität Berlin 18. Juli 2008 1 Worum geht es? 2 Was soll das System können? 3 Wie kann es funktionieren? Wie bestimme
Navigation für ÖV-Kunden Fachgebiet Schienenfahrwege und Bahnbetrieb Technische Universität Berlin 18. Juli 2008 1 Worum geht es? 2 Was soll das System können? 3 Wie kann es funktionieren? Wie bestimme
WLAN-Ortung im Projekt MagicMap Referenzpunkteverwaltung
 WLAN-Ortung im Projekt MagicMap Referenzpunkteverwaltung Stefan Rauch 08.07.2008 Humboldt-Universität zu Berlin Institut für Informatik Lehrstuhl für Rechnerkommunikation und Kommunikation Leiter: Prof.
WLAN-Ortung im Projekt MagicMap Referenzpunkteverwaltung Stefan Rauch 08.07.2008 Humboldt-Universität zu Berlin Institut für Informatik Lehrstuhl für Rechnerkommunikation und Kommunikation Leiter: Prof.
Kai Eckert eckertk@rumms.uni-mannheim.de
 Übersicht über Wireless LAN basierte Indoor Positionierungssysteme eckertk@rumms.uni-mannheim.de Mobile Business Seminar Lehrstuhl für Praktische Informatik IV Prof. Dr. Wolfgang Effelsberg Betreuer: Thomas
Übersicht über Wireless LAN basierte Indoor Positionierungssysteme eckertk@rumms.uni-mannheim.de Mobile Business Seminar Lehrstuhl für Praktische Informatik IV Prof. Dr. Wolfgang Effelsberg Betreuer: Thomas
Fit in Mathe. Musterlösungen. Dezember Klassenstufe 9 Messen
 Thema Messen Forme die folgenden Längenmaße in m um a) 3 km b) 8900 mm c) 9 dm d) 91 cm e) 5 10 7 μm (Hinweis: 1 μm = 1 1000 mm, bezeichnet als Mikrometer) zu a) 3000 m zu b) 89,00 m zu c),9 m zu d) 9,1
Thema Messen Forme die folgenden Längenmaße in m um a) 3 km b) 8900 mm c) 9 dm d) 91 cm e) 5 10 7 μm (Hinweis: 1 μm = 1 1000 mm, bezeichnet als Mikrometer) zu a) 3000 m zu b) 89,00 m zu c),9 m zu d) 9,1
Projektplanung * Von J. Gemer, München
 Projektplanung * Von J Gemer, München Allgemeines Bei GPS-Messungen mit dem Anspruch geodätischer Genauigkeit ist genauso wie bei herkömmlichen terrestrischen Messungen eine gründliche Meßvorbereitung
Projektplanung * Von J Gemer, München Allgemeines Bei GPS-Messungen mit dem Anspruch geodätischer Genauigkeit ist genauso wie bei herkömmlichen terrestrischen Messungen eine gründliche Meßvorbereitung
Wie sich Maschinen in unserer Welt zurechtfinden können
 Mittwoch, den 7. Mai 2014 Spielregeln: 1. Fragen aufschreiben und am Ende stellen 2. Beide Hände oben: Mucksmäuschenstille 3. Notizen machen 1 Sinnesorgane Verstehen: Die Sinnesorgane allein reichen nicht!
Mittwoch, den 7. Mai 2014 Spielregeln: 1. Fragen aufschreiben und am Ende stellen 2. Beide Hände oben: Mucksmäuschenstille 3. Notizen machen 1 Sinnesorgane Verstehen: Die Sinnesorgane allein reichen nicht!
GNSS/IMU Integration für die präzise Bestimmung einer Flugtrajektorie
 GNSS/IMU Integration für die präzise Bestimmung einer Flugtrajektorie Fabian Hinterberger Institut für Geodäsie und Geophysik, Tu Wien 18. Nov. 2011 1 Motivation Motivation Gegenüberstellung Eigenschaften
GNSS/IMU Integration für die präzise Bestimmung einer Flugtrajektorie Fabian Hinterberger Institut für Geodäsie und Geophysik, Tu Wien 18. Nov. 2011 1 Motivation Motivation Gegenüberstellung Eigenschaften
Lösung für Schutz- und Rettungsdienste
 Lösung für Schutz- und Rettungsdienste Einsatz Status Position Kommunikation, Integration und Webportal Zuverlässige, schnelle und klare Datenübermittlung ist für Schutz- und Rettungsdienste unverzichtbar
Lösung für Schutz- und Rettungsdienste Einsatz Status Position Kommunikation, Integration und Webportal Zuverlässige, schnelle und klare Datenübermittlung ist für Schutz- und Rettungsdienste unverzichtbar
Positionsbestimmung und GPS
 Positionsbestimmung und GPS Das Geoid eine Annäherung der Erdgestalt Ellispoidparameter O Oder Abplattung f = (a-b)/a Bezugsellipsoide - Bespiele Ellipsoidische Koordinaten Länge ( ), Breite ( ) Einheiten:
Positionsbestimmung und GPS Das Geoid eine Annäherung der Erdgestalt Ellispoidparameter O Oder Abplattung f = (a-b)/a Bezugsellipsoide - Bespiele Ellipsoidische Koordinaten Länge ( ), Breite ( ) Einheiten:
Neue Ansätze für Mustererkennung und automatisches Lernen
 Z Y X Neue Ansätze für Mustererkennung und automatisches Lernen Vortrag im Rahmen des 2. Technologieforums Bildverarbeitung am 03./04. November 2015 Johannes Zügner STEMMER IMAGING GmbH, Puchheim GLIEDERUNG
Z Y X Neue Ansätze für Mustererkennung und automatisches Lernen Vortrag im Rahmen des 2. Technologieforums Bildverarbeitung am 03./04. November 2015 Johannes Zügner STEMMER IMAGING GmbH, Puchheim GLIEDERUNG
Positionsbestimmung mit GPS-Satelliten
 Bild 5.7_1 Das satellitengestützte Radionavigationssystem NAVSTAR GPS (NAVigation System with Time And Ranging Global Positioning System) wird seit 1973 im Auftrag des US-Verteidigungministeriums (Department
Bild 5.7_1 Das satellitengestützte Radionavigationssystem NAVSTAR GPS (NAVigation System with Time And Ranging Global Positioning System) wird seit 1973 im Auftrag des US-Verteidigungministeriums (Department
Teach-In für die 3D-Scan Akquise mit einem Roboter. Teach-In für die 3D-Scanakquise mit einem mobilen Roboter
 Teach-In für die 3D-Scan Akquise mit einem Roboter DoritStruckmeier, Borrmann Dorit Oldenburger 2017 Oliver Borrmann,3D-Tage Andreas Nüchter 1 Zielsetzung der Arbeit Ein mobiler Roboter fährt einen angelernten
Teach-In für die 3D-Scan Akquise mit einem Roboter DoritStruckmeier, Borrmann Dorit Oldenburger 2017 Oliver Borrmann,3D-Tage Andreas Nüchter 1 Zielsetzung der Arbeit Ein mobiler Roboter fährt einen angelernten
"Mixed Reality" kann der Computer zum echten Helfer werden?
 "Mixed Reality" kann der Computer zum echten Helfer werden? P. F. Elzer, H. Chen, V. Nikolic Institut für Prozess und Produktionsleittechnik () der Technischen Universität Clausthal () JuliusAlbertStr.
"Mixed Reality" kann der Computer zum echten Helfer werden? P. F. Elzer, H. Chen, V. Nikolic Institut für Prozess und Produktionsleittechnik () der Technischen Universität Clausthal () JuliusAlbertStr.
Die Notwendigkeit von GNSS Interference Monitoring in Österreich
 Die Notwendigkeit von GNSS Interference Monitoring in Österreich Sascha Bartl, BSc TeleConsult Austria GmbH (Graz, Austria) AHORN 2014 der Alpenraum und seine Herausforderungen im Bereich Orientierung,
Die Notwendigkeit von GNSS Interference Monitoring in Österreich Sascha Bartl, BSc TeleConsult Austria GmbH (Graz, Austria) AHORN 2014 der Alpenraum und seine Herausforderungen im Bereich Orientierung,
5 Flugsteuerungen. Christian Rattat, Multicopter selber bauen, dpunkt.verlag, ISBN D3kjd3Di38lk323nnm
 D3kjd3Di38lk323nnm 5 Flugsteuerungen Der Kern jedes Multicopters ist die Flugsteuerung. Diese setzt die Steuersignale der Fernsteuerung in verwertbare Signale für die Motoren um. Die Fernsteuerung liefert
D3kjd3Di38lk323nnm 5 Flugsteuerungen Der Kern jedes Multicopters ist die Flugsteuerung. Diese setzt die Steuersignale der Fernsteuerung in verwertbare Signale für die Motoren um. Die Fernsteuerung liefert
Dom-Gymnasium Freising Grundwissen Natur und Technik Jahrgangsstufe 7. 1 Grundwissen Optik
 1.1 Geradlinige Ausbreitung des Lichts Licht breitet sich geradlinig aus. 1 Grundwissen Optik Sein Weg kann durch Lichtstrahlen veranschaulicht werden. Lichtstrahlen sind ein Modell für die Ausbreitung
1.1 Geradlinige Ausbreitung des Lichts Licht breitet sich geradlinig aus. 1 Grundwissen Optik Sein Weg kann durch Lichtstrahlen veranschaulicht werden. Lichtstrahlen sind ein Modell für die Ausbreitung
Dokumentation. Bestandsaufnahmen. Vorteile. und. Bestandsdokumentationen mit neuen Techniken
 und Dokumentation Bestandsaufnahmen Vorteile Bestandsdokumentationen mit neuen Techniken Überkopfwegweiser, Brückeninspektionen, Fahrbahnkontrolle, Inspektionen von Stützmauern, Kontrolle von Sicherungsmaßnahmen,
und Dokumentation Bestandsaufnahmen Vorteile Bestandsdokumentationen mit neuen Techniken Überkopfwegweiser, Brückeninspektionen, Fahrbahnkontrolle, Inspektionen von Stützmauern, Kontrolle von Sicherungsmaßnahmen,
Umgebungsbeschreibung anhand auditiver Perzeption zur Unterstützung mobiler Navigation
 Umgebungsbeschreibung anhand auditiver Perzeption zur Unterstützung mobiler Navigation Andreas Maier Universität des Saarlandes Computational Linguistics amaier@coli.uni-sb.de Überblick Warum sind auditiv
Umgebungsbeschreibung anhand auditiver Perzeption zur Unterstützung mobiler Navigation Andreas Maier Universität des Saarlandes Computational Linguistics amaier@coli.uni-sb.de Überblick Warum sind auditiv
GPS - Aktueller Stand und künftige Potentiale
 armasuisse Bundesamt für Landestopografie swisstopo Bereich GPS - Aktueller Stand und künftige Potentiale Informationstagung Landtechnik 2009 13. Oktober 2009, Tänikon U. Wild Agenda Satellitensysteme
armasuisse Bundesamt für Landestopografie swisstopo Bereich GPS - Aktueller Stand und künftige Potentiale Informationstagung Landtechnik 2009 13. Oktober 2009, Tänikon U. Wild Agenda Satellitensysteme